
Group Decisions, Contracts and Informational Cascades
37
Electronic copy available at: http://ssrn.com/abstract=1932882 Group Decisions, Contracts and Informational Cascades 1 Praveen Kumar C.T. Bauer College of Business University of Houston Houston, TX 77204 [email protected] Nisan Langberg C.T. Bauer College of Business University of Houston Houston, TX 77204 [email protected] September 22, 2011 1 We thank Daron Acemoglu, Mark Armstrong, Ken Arrow, Salvadore Barbera, Ken Binmore, Philip Bond, Andres Caravajal, Michael Fishman, Michael Gallmeyer, Tom George, Itay Goldstein, Roger Guesnerie, Peter Hammond, Milton Harris, Ron Kaniel, Marcus Miller, Dilip Mookherjee, Adriano Rampini, K. Sivaramakrishnan, S. Viswanathan, Myrna Wooders, and seminar partici- pants at University of Houston, Texas A&M University, the Duke-UNC Corporate Finance Con- ference, the Utah Winter Finance Meetings, the Western Finance Association Meetings, and the Marie Curie Conference on Economic Theory (in the honor of Peter Hammond) at the University of Warwick for useful comments or discussions on the issues addressed in this paper.
-
Upload
independent -
Category
Documents
-
view
1 -
download
0
Transcript of Group Decisions, Contracts and Informational Cascades
Electronic copy available at: http://ssrn.com/abstract=1932882
Group Decisions, Contracts and
Informational Cascades1
Praveen Kumar
C.T. Bauer College of Business
University of Houston
Houston, TX 77204
Nisan Langberg
C.T. Bauer College of Business
University of Houston
Houston, TX 77204
September 22, 2011
1We thank Daron Acemoglu, Mark Armstrong, Ken Arrow, Salvadore Barbera, Ken Binmore,Philip Bond, Andres Caravajal, Michael Fishman, Michael Gallmeyer, Tom George, Itay Goldstein,Roger Guesnerie, Peter Hammond, Milton Harris, Ron Kaniel, Marcus Miller, Dilip Mookherjee,Adriano Rampini, K. Sivaramakrishnan, S. Viswanathan, Myrna Wooders, and seminar partici-pants at University of Houston, Texas A&M University, the Duke-UNC Corporate Finance Con-ference, the Utah Winter Finance Meetings, the Western Finance Association Meetings, and theMarie Curie Conference on Economic Theory (in the honor of Peter Hammond) at the Universityof Warwick for useful comments or discussions on the issues addressed in this paper.

Electronic copy available at: http://ssrn.com/abstract=1932882
Abstract
We analyze the (Perfect Bayesian) equilibrium in an observational learning model with com-
munication and bilateral incentive contracts when pairs of agents sequentially make decisions
based on internal communications and the observed history of decisions by other groups. One
of the agents in each pair receives a private noisy signal on an unknown state and we char-
acterize asymptotic learning through the design of e¢ cient bilateral contracts. Long run
information aggregation depends not only on the properties of the signal structure but also
on the intensity of the con�icts of interest between the informed and uninformed agents.
In contrast to the results from the herding literature, we �nd that information can be as-
ymptotically complete with bounded (private) beliefs while there may be herding even with
unbounded beliefs; in the latter case herding occurs when the con�icts are su¢ ciently high
that it is incentive-e¢ cient to divorce decisions from private signals. We derive su¢ cient
conditions on agents�preferences and the signal structure for learning to be asymptotically
complete as the number of agent-pairs gets large and illustrate their applications by adapting
models from the price-quality discrimination and investment contracting literatures.
Keywords: Group Decisions; Bayesian learning; Optimal contracting; Interest
con�icts; Pooling
JEL classi�cation codes: G32, D23
1 Introduction
The aggregation of dispersed information, with its attendant implications for e¢ cient re-
source allocation, has been a central concern in economics. Recently much attention has
been directed towards the possibility that agents completely ignore their useful private in-
formation and herd on wrong decisions if they make decisions sequentially after observing
decisions by other agents (Bannerjee, 1992; Bikhchandani, Hirshleifer and Welch, 1992).
However, in many situations decisions are made by groups based on intragroup communi-
cations and the observed decisions of other groups. For example, investors (e.g., venture
capitalists) allocate funds to start-up �rms in an emerging industry based on their commu-
nications with managers/founders and the investments made by other �rms in the industry
(Gompers and Lerner, 1999). Similarly, governments approve the marketing of new drugs
based on whether they have been licensed to be produced in other countries and based on
their own communications with local agencies that conduct safety trials.
Unlike the single-agent decisions typically considered in the herding literature, there is
often heterogeneous information within and con�icts of interest among group members �
impeding information aggregation both within and across groups because the informed group
members will have incentives to shade their information. However, in such environments, the
informed can be provided incentives for communication through contracting or mechanism
design. In the examples given above, uninformed investors and regulators can design incen-
tive contracts or mechanisms to induce information from managers and domestic producers,
respectively, and the contract design itself will depend on the observed decisions. Therefore,
the results from the herding literature represent only one aspect of the more general enquiry
into the type of economic environments that may (or may not) lead to an aggregation of
dispersed information toward e¢ cient decisions.
Motivated by these examples, we examine a model with a large number of pairs (the
simplest possible group) of agents that together sequentially decide on an action, when
their payo¤s (from various actions) depend heterogeneously on an underlying state that is
unknown. One of the agents in each pair receives a private noisy signal on the true state.
But because agents� interests are not perfectly aligned, the informed agent will generally
1

not communicate this information truthfully in the absence of speci�c incentives to do so.
We examine the sequence of interim e¢ cient decision rules (Holmstrom and Myerson, 1983)
implemented through the design of e¢ cient bilateral communication contracts, when agents
can observe the previous decisions made by other pairs. Our focus is to clarify the conditions
under which information is aggregated or is complete asymptotically (Smith and Sorensen,
2001; Acemoglu, et al., 2010); i.e., as the number of pairs becomes in�nite the Bayesian
estimate of the state converges in probability to the true state.
Our model therefore combines elements of both the herding and the mechanism design
literatures. As in the herding literature, we consider long term Bayesian learning when
agents sequentially decide on an action based on private noisy signals on an unknown state
(that a¤ects payo¤s) and on the observed history of decisions by other agents. However, here
agents�choices are governed by the optimal communication mechanisms designed by unin-
formed agents. Moreover, in our model the optimal contract design at any stage depends on
the observational learning from decisions (or contracting outcomes) made by other groups.
The dependence of the optimal contract design on the observation of prior contracting out-
comes is an important aspect of our model.
Prima facie, the ability to design incentives for truthful communication of private infor-
mation should reduce the likelihood of herding on the wrong decision. Indeed, in a group
decision with communication the informed agents might not suppress their information once
confronted with information-inducing incentive contracts designed by the uninformed agents.
Somewhat surprisingly, however, our analysis indicates that the con�icts of interest among
group members in the multi-agent decision making environment can impede the aggregation
of information. This is because, unlike the single-agent decision-making situation, the cru-
cial determinant of long run information aggregation when decisions are made by groups is
not the information content of the signals per se but whether the informed agents have the
incentives to reveal their signals to the uninformed agents.
To explicate, for complete learning it is su¢ cient that the optimal contracts induce truth-
telling from the informed agent for any given history of decisions by other groups. But if
there exist equilibrium paths where optimal contracts cease to induce information from the
informed agents, then partial learning (or herding) occurs. Indeed, we �nd that if groups
2

pool asymmetric information to make decisions, then herding on the wrong decision is still
possible even if there are unbounded private beliefs, in contrast to results in the literature
that information will be asymptotically complete with unbounded private beliefs (Smith and
Sorensen, 2001).1
We derive su¢ cient conditions on preferences and signal structures that ensure complete
learning in the long run. These conditions are related to (but are not equivalent to) conditions
used in the optimal contracting literatures for adverse selection and moral hazard (even
though there are no unobservable actions in our model). To guarantee complete learning
asymptotically, one requires not only the Spence-Riley single crossing property but also
the monotone hazard rate property of the posterior beliefs with the monotone and concave
likelihood ratio properties of signals (conditional on the state). The former condition on
posterior beliefs is more restrictive than the monotone hazard rate property of the prior
distribution of types (Myerson, 1981; Maskin and Riley, 1984).2 Meanwhile, the monotone
and concave likelihood ratio properties of noisy signals are used, for example, by Jewitt
(1988).3 Essentially, these conditions are su¢ cient to ensure that the history-dependent
interim-e¢ cient decision rules do not pool over the domain of the informed agents�private
signals.
To help understand the role of the aforementioned restrictions, we note two important
di¤erences between our set up and the standard nonlinear pricing problem with hidden
types.4 First, in our set up � as in the canonical herding model � the private information
is a noisy signal on the underlying state; the signal by itself does not a¤ect agents�payo¤s
(as in adverse selection models). Second, in our dynamic model the optimal contract design
depends on the endogenous posterior beliefs on the unknown state and not the exogenously
1Private beliefs are bounded if the likelihood ratio implied by individual signals is �nite and strictlybounded away from zero. That is, with bounded beliefs the information content of signals (at the margin)is bounded above. In contrast, with unbounded private beliefs agents can receive signals with unboundedinformation content.
2The monotone hazard rate property of the prior distribution of types plays an important role in guar-anteeing the monotonicity of the optimal decision rule in models with adverse selection.
3In Jewitt (1988) these conditions are used in validating the �rst order approach for the derivation ofoptimal contracts in moral hazard settings.
4Varian (1989), Fudenberg and Tirole (1991) and Wilson (1993) provide excellent expositions of thisliterature.
3
given distribution of types. In particular, the probability distribution of the private informa-
tion (i.e., the signals), conditional on the state, is invariant even as both agents sequentially
become more certain of the state.
But how economically appealing (or restrictive) are these su¢ cient conditions? In partic-
ular, what happens to asymptotic learning when they do not apply? To address these issues,
we present two applications of our analysis on asymmetric information problems that have
been analyzed widely in the literature. We �rst examine learning regarding the unknown
value to consumers of a product innovation by adapting the standard optimal price-quality
discrimination model (Mussa and Rosen, 1978; Varian, 1989) to our setting. Here, sellers
induce self-selection of the informed consumers through the design of price-quality discrim-
ination menus. In equilibrium this leads to asymptotically complete learning, i.e., the true
value of the product innovation eventually becomes known as the number of buyer-seller
interactions gets very large.
We also examine learning on unknown capital productivity in a new industry, a prob-
lem of long-standing interest in the literature (Zeira, 1987, 1994; Rob, 1991). In our set-up,
noisy signals on the unknown state are received by �rms that sequentially enter the industry.
However, because of separation of ownership and control, the signals are observed privately
by managers; there is an agency con�ict between owners and managers because the latter
privately value control over larger assets or investment (Stulz, 1990; Hart, 1995). We adapt
the standard incentive contracting formulation of this agency con�ict (Harris and Raviv,
1996) to our sequential observational learning setting. In this case, the single crossing prop-
erty does not apply for the managers�preferences. Unlike the previous example, here we �nd
that there is herding when the agency con�ict is su¢ ciently high, i.e., the managers�private
valuation is su¢ ciently large.
In sum, departures from the su¢ cient conditions for e¢ cient information aggregation
can occur in many important economic environments and there can be herding on the wrong
decision even when communication and incentive contracting are feasible; action spaces are
unrestricted; and private signals have in�nite information content. Thus, rich action or
signal spaces can not by themselves reduce drastically the probability of herding on the
wrong action, as is the case with single-agent decisions (Lee, 1993; Smith and Sorensen,
4
2001; Eyester and Rabin, 2009). In particular, if there is a substantial con�ict of interest
among the agents of a group, then the interim-e¢ cient decision rule may completely pool
over the hidden signals, allowing herding on the same ine¢ cient decision even when private
beliefs are unbounded.5
The remainder of the paper is organized as follows. In Section 2, we describe the ba-
sic economic environment and de�ne aspects of optimal contracts and learning that help
frame the subsequent analysis. Section 3 provides the main results, while Section 4 presents
applications of the analysis of Section 3. Section 5 summarizes the results and concludes.
2 The Basic Model
2.1 Environment
There are a countably in�nite number of stages indexed by n 2 N . To each stage is associated
a pair of individuals (xn; yn) who together decide on an action an chosen from a pre-speci�ed
action space A � R. For convenience, we label individuals fxng1n=1 and fyng1n=1 as type-X
and type-Y agents, respectively. Each individual�s payo¤s depend on its type (X or Y ),
the action an, an underlying state � 2 � = f0; 1g, and any monetary transfers between
them wn 2 W � R: We assume that the payo¤s for type-X and type-Y agents are given,
respectively, by:
UX(an; wn; �) = uX(an; �) + wn; U
Y (an; wn; �) = uY (an; �)� wn (1)
Here, ui : A�� ! R; i = X,Y, are von Neuman-Morgenstern expected utility functions
that are thrice continuously di¤erentiable on (the interior of) A and concave. We allow for
the possibility that the agents cannot agree or decide on an action, in which case they each
receive zero utility.
The true state � is unknown and all individuals have the common prior belief �1 = Pr(
5Indeed, it is possible that the private signals of agents are not used in decisions even in the early rounds,irrespective of whether there are bounded or unbounded beliefs. This is in contrast to the herding modelswhere agents use their information to determine their actions in the early rounds even with bounded beliefs.
5

� = 1): At each stage n; type-X agents privately receive signals receive signals sn 2 S; which
is a metric space. The signals fsng1n=1are generated independently conditional on � according
to the non-degenerate probability measures G�; � 2 �; on the common support S, and such
that G0; G1 are are non-identical. These assumptions imply that at least some signals are
informative, but no signal is perfectly revealing of �. We will denote the probability density
(when sn is absolutely continuous) and the probability mass functions (when S is �nite) with
g0(s); g1(s), respectively.
2.2 Bilateral Contracting
We focus on bilaterally interim e¢ cient decision rules at each stage n 2 N :6 The information
set at n is �n = (sn; hn) 2 �n ; where hn is the observed pro�le of decisions di = (ai; wi) for
i = 1; :::; n � 1; i.e., hn = (d1; :::; dn�1) = ((a1; w1); :::; (an�1; wn�1)). A decision rule is the
mapping �n : �n ! �[A�Wn] (the space of probability measures on A�Wn). We will let
Q(�n(�n)) denote the projection of �n(�n) on �[A�Wn] (i.e., the conditional distribution
of dn as governed by �n(�n)).
Now let �n = Pr(� = 1 hn): Then, by Bayes�rule, the private beliefs of type-X agents
given the signal sn are:7
pn(sn;�n) � Pr(� = 1 sn; hn) =g1(sn)�n
g1(sn)�n + g0(sn)(1� �n)(2)
The support of the private beliefs is [p¯; �p] � [0; 1]. Private beliefs are bounded if p
¯> 0 and
�p < 1; but they are unbounded if [p¯; �p] = [0; 1]:
The expected utility of xn when sn = s, but the decision rule �n(sn = s0; hn) is used, are:
V Xn (s; s0;hn; �n) �
ZA�W
�pn(s;�n)U
X(a; w; 1) + (1� pn(s;�n))UX(a; w; 0))�dQ(�n(s
0; hn))
(3)
6The concept of interim e¢ ciency is introduced and discussed generally in Hlomstrom and Myerson (1983).7For the discrete signal space, this specializes to pjn =
Gj1�n
Gj1�n+G
j0(1��n)
; j 2 fH;Lg:
6

A decision rule �n is (Bayesian) incentive compatible if for every s; s0 2 S :
V Xn (s; s;hn; �n) � V Xn (s; s0;hn; �n); s 6= s0 (4)
(For notational ease, let V Xn (s;hn; �n) � V Xn (s; s;hn; �n)): In addition, �n is acceptable for
xn if
V Xn (sn;hn; �n) � 0;8s 2 S (5)
�n is admissible if it is incentive compatible and acceptable.
Meanwhile, the expected utility of yn conditional on hn; namely, V Yn (hn; �n), is computed
as follows. Let n(s;hn) denote the probability density function of s 2 S conditional on hn;
i.e., n(s;hn) = g1(s)�n + g0(s)(1� �n). Also, denote the cumulative distribution of signals
at stage n by �n(sn = s;�n) = G1(s)�n + G0(s)(1 � �n). Then the expected utility of ynunder the decision rule �n is:
V Yn (hn; �n) =
ZS
ZA�W
�pn(s;�n)U
Y (a; w; 1) + (1� pn(s;�n))UY (a; w; 0)�dQ(�n(s; hn)) n(s)ds
(6)
��n is bilaterally interim e¢ cient if it is admissible and maximizes V Yn (hn; �n):8
By the revelation principle (e.g., Myerson, 1979) any admissible decision rule can be
implemented through a direct mechanism or bilateral contract with the message spaceMn =
S (with truth telling on signals) for xn and the (possibly randomized) message-contingent
decision rule �n(mn; hn) 2 �[A�Wn]; mn 2 Mn: With a straightforward adaptation of
notation, the incentive compatibility conditions (3)-(4) can be expressed as V Xn (s;hn; �n) �
V Xn (s; s0;hn; �n); s 6= s0 2 S; i.e., �n is incentive compatible if it induces truth-telling with
mn = sn. Similarly, acceptability (for xn) requires V Xn (s;hn; �n) � 0, for each s 2 S.
The optimal bilateral contract C�n(hn) = ��n(mn; hn) is then an admissible contract that
maximizes V Yn (hn; �n):
By construction, the various generations of agents (xn; yn) observe only the prior pro�le
8In general, interim e¢ cient rules maximize a welfare function that is a weighted average of the expectedutilities of the two agents (xn; yn), where the weights may depend on �n (Holmstrom and Myerson, 1983).Our formulation conforms to the standard principal-agent contracting framework.
7

of contract outcomes or decisions, i.e., f(at; wt)gt�n�1 : Hence, form the viewpoint of obser-
vational learning, it is the information content of prior decisions (rather than intra-group
messages) that is relevant. But the information gleaned from the optimal decisions can range
from complete revelation � where the optimal decision rule ��n is invertible in the signal sn
� to no revelation � when the decision rule is identical for all signal-types.
For our purposes, the following categorization of the informational content of contracting
outcomes is useful. Let ��n(mn = s; hn) denote the support of the probability distribution of
decisions Q(��n(mn = s; hn)) and recall that �n(s;hn) is the cumulative probability of sn = s
conditional on the observable history of contracting decisions hn. Then the optimal contract
is:
De�nition 1. A separating contract (denoted by CS�n (hn)) if
Pr(sn = s0jdn 2 ��
n(mn = s0; hn); hn) = 1; 8s0 2 S;
2. A bunching contract (denoted by CB�n (hn)) if there exist s; s0 2 S such that
Pr(sn = s0jdn 2 ��n(mn = s
0; hn); hn) < 1 &
Pr(sn � sjdn 2 ��n(mn = s
0; hn); hn) 6= �n(s;hn);
3. A pooling contract (denoted by CP�n (hn)) if for all s; s
0 2 S,
Pr(sn � sjdn 2 ��n(mn = s
0; hn); hn) = �n(s;hn):
While the strict monotonicity (or separation) and bunching in the optimal allocation
with asymmetric information has been widely studied, we reiterate the important di¤erences
between our set up, which builds on the canonical herding model, and the standard nonlinear
pricing problem with hidden types. First, the private information, i.e., the signal s, itself
does not a¤ect the payo¤s of either the informed or the uninformed agent; rather, signals
in�uence expected payo¤s only through their e¤ect on the Bayes-estimate (or posteriors)
on the unknown state parameter �. Second, there is a distinction between the posterior
8

beliefs on �, which are endogenous because they depend on the outcome of the contracting
game, and the likelihood that the (type-X ) agent will receive a given signal, which is �xed
exogenously by the signal structure fG1(s); G0(s)g:
2.3 Equilibrium and Asymptotic Learning
A sequence of bilateral contracts f�ng1n=1 generates a stochastic process of decisions f(an; wn)g1n=1 ;
where the randomization occurs through the realization of signals fsng1n=1 and the (possibly)
randomized decision rule. A Perfect Bayesian equilibrium (or just �equilibrium�) in the game
set up above is then speci�ed by a sequence of optimal bilateral contracts �� = f��ng1n=1 and
the sequence of communication strategies (for xn)m� = fm�ng1n=1 where m
�n = sn; n 2 N . It
is straightforward to show that a ��n = (��;m�) is an equilibrium because, by construction
��n(mn; hn) and m�n = sn are sequentially rational strategies.
9
An equilibrium is then the pro�le �� = f��ng1n=1. (We label the continuation equilibrium
at the root hn by �� hn :) We let P�� denote the probability measure generated by ��; while
the Bayes-consistent beliefs Pr(� = 1 hn) recursively generated by this measure are denoted
by ���n : Then, learning is asymptotically complete along �
� if
limn!1
Pr(���
n = � �) = 1 (7)
That is, with probability 1 the posterior measure is degenerate and the expectations of
� are consistent (with the true � 2 f0; 1g). And learning is asymptotically incomplete if
limn!1 Pr(���n = � �) < 1:
Whether learning is asymptotically complete (or incomplete) depends, of course, on the
information content of the contracting decisions. In particular, note that if at any information
set hn, the optimal contract is pooling (as de�ned above), then ���n+1 = �
��n and hence every
CP�n (hn+i); i = 1; 2::; along �
�hn will also be pooling:
9To complete the speci�cation of the PBE, we assume that upon observing any market outcome cn =2C�n(�n), for any n, �n+1 = �n:
9

Proposition 1 Along any ��, for any hn, n 2 N ; if C�n(hn) = CP�n (hn), then ���n+i = �
��n ,
i 2 N , with probability 1.
Thus, complete pooling of the optimal contracts will rule out complete learning. Con-
versely, if with positive probability the optimal contracts reveal some new information, which
will be the case if they are separating or partially bunching, then learning will be complete.
Corollary 1 Along any ��, for any hn, n 2 N ; if C�n(hn) = CP�n (hn) and 0 < �
��n < 1; then
learning is asymptotically incomplete along �� hn : However, if C�n(hn) = C
S�n (hn)�CB�
n (hn)
for every hn, n 2 N , then learning is asymptotically complete along ��:
3 Conditions for Complete Learning
In this section, we identify conditions that are su¢ cient to rule out complete pooling in the
optimal contract; i.e., these conditions ensure asymptotically complete learning (cf. Corollary
1). We will adopt the convention that ui(�; �); i =X,Y are strictly increasing functions, i.e.,
ui1(a; �) > 0 and ui(a; 1) > ui(a; 0), for every a 2 A.10 In addition, we will use the following
restrictions on preferences and the signal structure:
De�nition The preferences of the type-i agent, i = X,Y, satisfy the single crossing property
(SCP) if ui1(a; 1) � ui1(a; 0); for every a 2 A:11
The SCP is the well-known Spence-Mirrleees condition (with binary types) and plays
a basic role in theory of sorting and models of incomplete information (maskin and Riley,
1984; Milgrom and Shannon, 1994). Next, �x any information set hn, n 2 N ; such that the
posterior beliefs are �n. (Since the posterior beliefs �n are informationally su¢ cient for the
history data hn, we suppress h for notational ease.) Recall that, the cumulative distribution
of signals at stage n is �n(sn = s;�n) = G1(s)�n+G0(s)(1��n) with the associated hazard
rate:1� �n(s;�n) n(s;�n)
=1� (G1(s)�n +G0(s)(1� �n))
g1(s)�n + g0(s)(1� �n)(8)
10This is essentially a labeling convention since it interprets the high state to be �good.�11The SCP will apply strictly if the inequality is strict for each a 2 A:
10
We will say that:
De�nition The signal structure fG1(s); G0(s)g satis�es the posterior monotone hazard rate
property (PMHRP) if, for any given �n 2 [0; 1],@�1��n(s;�n) n(s;�n)
�@s
� 0, for each s 2 S.
In the literature, the monotone hazard property (MHRP) on the distribution of types is
widely used (Myerson, 1981). However, the PMHRP is di¤erent than requiring the MHRP on
G�(s) for each �. The following is an example where the PMHRP is more restrictive than the
MHRP for G1(s) and G0(s): Let, for � > 2 and s � 0; g1(s) = (��1) exp(�(��1)s); g0(s) =
� exp(��s), and g1(s) = g0(s) = 0 when s < 0: In this case, the hazard rates are constant,
i.e., 1�G1(s)g1(s)
= (��1)�1 and 1�Go(s)g0(s)
= �; thus, the monotone hazard rate property is trivially
satis�ed for G1(s) and G0(s): However, the ratio
1� �n(s;�n) n(s;�n)
= n(s;�n)
� n(s;�n)� exp(��s)�n(9)
is not a constant.12
Finally, we also require the monotonicity and concavity restrictions on the likelihood
ratio of signals (conditional on the unknown parameter �).
De�nition The signal structure fG1(s); G0(s)g satis�es the
1. Monotone likelihood ratio property (MLRP) if g1(s)g0(s)
is increasing in s.13
2. Concave likelihood ratio property (CLRP) if g1(s)g0(s)
is concave in s.
The MLRP is used in the literature on hidden actions or moral hazard (along with other
conditions) to justify the �rst order approach to the analysis of the principal-agent problem
(Rogerson, 1985). Jewitt (1988) uses both the MLRP and the CLRP in developing another
set of conditions to justify the �rst order approach. This connection with moral hazard mod-
els is noteworthy because, while there are no hidden actions in our set-up, agents do receive
noisy signals on unobserved parameters (i.e., �). However, in moral hazard models the noisy
12Nevertheless, straightforward computations show that the PMHRP is satis�ed strictly in this case.13Note that when the signal space is binary, i.e., sn 2 fH;Lg, then the strict MLRP is satis�ed if
g1(s = H) > g0(s = H):
11

signal (output) is publicly observable and endogenously generated by the agent�s unobserv-
able action; here, the noisy signal (s) is private information and generated exogenously by
the unobservable state.
We examine the application of these conditions for two polar assumptions on the signal
space S: when signals are continuous, i.e., S is an interval on the real line, and when S is
binary.
3.1 Continuous Signals
Suppose that S = [sL; sH ] � R: For expositional convenience, we �rst restrict attention to
non-randomized contracts; we then show that under the identi�ed su¢ cient conditions for
non-pooling decision rules, this restriction is not binding. Thus, at each n 2 N the decision
rule is �n(s) = (an(s); wn(s)), and given any �n, the expected utility of xn when it receives
the signal s and reports s0 2 S is:
V Xn (s; s0;�n; �n) � pn(s;�n)uX(an(s0); 1) + (1� pn(s;�n))uX(an(s0); 0) + w(s0) (10)
Under our assumptions on ui, the optimal decision rule will be piece-wise continuously di¤er-
entiable (e.g., Hadley and Kemp, 1971). Maximizing (10) over s0 at a point of di¤erentiability
yields the necessary and su¢ cient conditions for local incentive compatibility:
@V Xn (s; s;�n; �n)
@s0= 0,
@2V Xn (s; s;�n; �n)
(@s0)2� 0 (11)
As usual (Mirrlees (1971) and onwards), we use the indirect utility function (with truth-
telling) to eliminate transfers in the optimal decision rule. Put,
JXn (s;�n; �n) � maxs02S
V Xn (s; s0;�n; �n) = V
Xn (s; s;�n; �n) (12)
If the SCP applies, then a decision rule �n(s) is incentive compatible if and only if an(�)
is a monotone increasing function, i.e., _an(s) � 0 (a.e.). Using (11)-(12) and applying the
12
envelope theorem yields,
dJXn (s;�n; �n)
ds� _JXn (a(s); s;�n) = _pn(s;�n)[u
X(an(s); 1)� uX(an(s); 0)] (13)
But the MLRP implies that _pn(s;�n; �n) � 0. This, along with the fact that uX is increasing
in �, implies that _JXn (a(s); s;�n) � 0. It follows from (13) then that the participation
constraint for the type-X agent binds only for sn = sL and, from the fundamental theorem
of calculus,
JXn (s;�n; �n) =
Z s
sL
_JXn (a(r); r;�n)dr (14)
Thus, while the role of the MLRP in the moral hazard literature is to ensure that the
optimal sharing rule for risk-averse agents is non-increasing in output, here its role is to
ensure that the private posterior beliefs of the informed agent for the high state (i.e., � = 1)
are non-decreasing in the signal (s), which in turn yields a convenient monotonicity (in s)
of the informed agents�indirect expected utility.
Meanwhile, the expected utility of yn with the decision rule �n(s) is:
V Yn (s;�n; �n) =�pn(s;�n)U
Y (an(s); wn(s); 1) + (1� pn(s;�n))UY (an(s); wn(s); 0)�
(15)
To derive the su¢ cient conditions for an(�) to be monotone, we examine the relaxed problem:
max�n(�)2A�W
ZS
V Yn (s;�n; �n) n(s;�n)ds, s.t., (14) (16)
Now, put,
Kin(an(s); s;�n) � pn(s;�n)(ui(an(s); 1) + (1� pn(s;�n))(ui(an(s); 0); i = X; Y (17)
This formulation allows us to eliminate transfers (i.e., wn(s)) and write (from (12), (15) and
(17)):
V Yn (s;�n; �n) = KYn (an(s); s;�n) +K
Xn (an(s); s;�n)� JXn (s;�n; �n) (18)
13

Next, by substituting the incentive compatibility constraint (14) into into (18), we can re-
write the relaxed problem as:
maxan(�)2A
ZS
�KYn (an(s); s;�n) +K
Xn (an(s); s;�n)�
Z s
sL
_JXn (a(r); r;�n)dr
� n(s;�n)ds
= maxan(�)2A
ZS
24 KYn (an(s); s;�n) +K
Xn (an(s); s;�n)�
1��n(s;�n) n(s;�n)
_JXn (an(s); s;�n)
35 n(s;�n)ds (19)
(applying integration by parts). The optimality condition for the optimal action is therefore:
YXi=X
@Kin(an(s); s;�n)
@an=1� �n(s;�n) n(s;�n)
@ _JXn (an(s); s;�n)
@an(20)
An application of the implicit function theorem on (20) clari�es the su¢ cient conditions for
the optimal action rule to be monotone.
Proposition 2 At each n 2 N and given any posterior expectations �n; the optimal action
rule a�n(s) is monotone increasing if SCP, MLRP, CLRP, and the PMHRP hold.
We note that in justifying the �rst-order approach to the optimal contract in the moral
hazard problem, Jewitt (1988) uses the MLRP and CLRP to ensure that the inverse of the
agent�s marginal utility with the optimal sharing rule is nondecreasing and concave. Here,
the MLRP, CLRP, PMHRP, and the SCP are jointly used to ensure the desired compar-
ative static property of the optimal decision rule, i.e., _a�n(s) > 0:14 Finally, the conditions
annunciated in Proposition 2 are su¢ cient to rule out randomization in the optimal decision
rule.15
Using Proposition 2 along with Corollary 1, we conclude that:
Theorem 1 Suppose that the SCP, MLRP, CLRP, and the PMHRP hold; and at least one
of these conditions applies strictly. Then, in any ��; C�n(�n) = CS�n (�n) for every �n: Hence,
learning is asymptotically complete along ��:
14Of course, the SCP per se plays no role when only hidden actions are present.15Strausz (2006) shows that randomization is super�uous if the optimal decision rule is monotone.
14

3.2 Discrete Signals
Suppose now that S = fH;Lg: For notational ease, let gj� = g�(s = j); jn = n(sn =
j;�n); j 2 fH;Lg; � 2 f0; 1g: (The notation (ajn; wjn); j 2 fH;Lg; is interpreted similarly.)
The optimal contracting problem is:
C�n(�n) 2 arg maxhajn;wjniH
j=L2A�Wn
fHXj=L
jn�pjnU
Y (ajn; wjn; 1) + (1� pjn)UY (ajn; wjn; 0)
�(21)
subject to,
pjnUX(ajn; w
jn; 1) + (1� pjn)UX(ajn; wjn; 0) �
pjnUX(akn; w
kn; 1) + (1� pjn)UX(akn; wkn; 0); j; k 2 fH;Lg (22)
pjnUX(ajn; w
jn; 1) + (1� pjn)UX(ajn; wjn; 0) � 0; j 2 fH;Lg (23)
In the standard adverse selection model with �nite types, the SCP ensures that the incen-
tive compatibility constraints are binding only in one direction and the individual rationality
(or participation) constraint is also only binding for the boundary type. However, because
of the noisy signal structure in our setting, one also has to assume the MLRP in order for
these properties of the optimal contract to apply.
Proposition 3 If the SCP and the MLRP hold, then in any optimal separating contract
CS�n (�n) the incentive and individual rationality constraints (22)-(23) are only binding for
the lower-type, i.e., sn = L:
Using Proposition 3, we can substitute the binding IR and IC constraints for the low-type
in the objective function (21) to eliminate wLn and wHn (see the Appendix): The �rst order
necessary and su¢ cient condition for optimal actions are then:
pHn uY1 (a
Hn ; 1) + (1� pHn )uY1 (aHn ; 0) + pLnuX1 (aLn ; 1) + (1� pLn)uX1 (aLn ; 0) = 0 (24)
YXi=X
pLnui1(a
Ln ; 1) + (1� pLn)ui1(aLn ; 0) = 0 (25)
15

It follows therefore that aH�n > aL�n if the SCP and the MLRP hold. To see this, suppose
not and assume that aH�n = aL�n = a: Then subtracting (25) (evaluated at aLn = a) from (24)
(also evaluated at aHn = a), we obtain:
pHn uY1 (a; 1) + (1� pHn )uY1 (a; 0)� (pLnuY (a; 1) + (1� pLn)uY1 (a; 0))
= (pHn � pLn)(uY1 (a; 1)� uY1 (a; 0)] > 0 (26)
using the SCP and the MLRP.
Theorem 2 Suppose that S is �nite and the SCP and MLRP hold. Then, in any ��;
C�n(�n) = C
S�n (�n) for every �n: Hence, learning is asymptotically complete along �
�:
3.3 Unbounded Beliefs
Notice that the su¢ cient conditions for asymptotically complete learning apply independent
of the range of the posterior beliefs; i.e., they hold for both bounded and unbounded beliefs.
Here, we depict the situation with bounded beliefs and unbounded beliefs respectively as:
infs2S
g1(s)
g0(s)= �� & sup
s2S
g1(s)
g0(s)= �+ (27)
infs2S
g1(s)
g0(s)= 0 & sup
s2S
g1(s)
g0(s)=1 (28)
Of course, we know from the herding literature that there can be asymptotically complete
learning when beliefs are unbounded, even if there is herding when beliefs are bounded (Smith
and Sorensen, 2001; Acemogulu et al., 2010). However, in the situation at hand, the issue
is not whether the type-X agent has arbitrarily high or low private (posterior) beliefs on
�; rather, the question is whether this agent has the incentives to reveal such information
to the type-Y agent? Put slightly di¤erently: If the optimal contract is completely pooling
with bounded beliefs, will pooling unravel if there are unbounded beliefs?
Consider �rst the case where the signal space is discrete and the MLRP applies. Here,
unbounded beliefs correspond to the situation wheregH1
gH0= 1. But suppose that the SCP
does not apply and, at the optimum, uY1 (a; 1) � uY1 (a; 0): It is apparent from (26) then
16
that unbounded beliefs will not necessarily reverse the ordering of the optimal decision rule
because with unbounded beliefs (pHn � pLn) is simply maximized at 1. Similarly, when the
signal space is continuous, unbounded beliefs by themselves are not su¢ cient to guarantee
that the optimal decision rule will be separating, i.e., a�n(s) is strictly monotone on a set of
positive measure. This can be checked directly from evaluating (20) for the case (28). We
will illustrate these points in our examples below.
4 Examples
We apply the analysis of the previous section to two concrete settings, namely, price-quality
discrimination and managerial investment contracts. Our analysis is of independent eco-
nomic interest because we extend the literatures that have examined these topics in di¤erent
settings.
4.1 A Sequence of Buyer-Seller Contracts
We consider �rst a sequential optimal price-quality discrimination model adapted to signal
structure at hand.16 Suppose that building on some putative technological innovation a new
product is introduced, but a critical parameter of the product�s performance and utility to
consumers � for example, its long run reliability � is unknown. An in�nite sequence of
�generations�n 2 N produce and consume various possible versions or �qualities� of the
product. However, the utility derived from any quality depends on the underlying (and
unknown) reliability of the product.17
In this setting, xn is the buyer and yn is the producer or seller, where xn purchases only
one unit of the product. The seller chooses the product quality an 2 R+; produced with the
unit cost �(an)2=2, and o¤ers it at the price wn: (Hence, A�Wn = R2+). If xn agrees to
16Varian (1989) provides an excellent survey of the price discrimination literature. The preference andcost speci�cation used here is adapted from Kumar (2002, 2006).17The notion of quality here represents the bundle of desirable attributes that are distinct from reliability.
To �x ideas, consider the introduction of a new architecture of smart phones that are sold in a variety ofperformance bundles, but the reliability of the underlying architecture is unknown.
17

purchase, then the payo¤s to the agents are:
UX(an; wn; �) = �an � wn
UY (an; wn; �) = wn ��(an)
2
2(29)
Here � 2 f0; 1g is the unknown reliability parameter. In every generation n; xn receives a
private signal sn 2 fH;Lg regarding � with the probability � � gH1 = gL0 > 12: Hence, both
the SCP and the MLRP apply in this example.
Next, we compute,
Hn � Pr(sn = H hn) = ��n + (1� �)(1� �n) (30)
Moreover, given the signal sn and beliefs �n the type distribution is:
pHn = Pr(� = 1 sn = H;�n) =Pr(� = 1; sn = H �n)
Pr(� = 1; sn = H �n) + Pr(� = 0; sn = H �n)(31)
=�n�
�n�+ (1� �n)(1� �)
pLn = Pr(� = 1 sn = L; �n) =�n(1� �)
�n(1� �) + (1� �n)�: (32)
Notice that,
E(� sn = k; �n) = Pr(� = 1 sn = k; �n), for k 2 fH;Lg.
The optimal contracting problem is therefore:
C�n(�n) 2 arg max
hajn;wjniHj=L
2A�Wn
HXj=L
jn[wjn �
�(ajn)2
2] (33)
subject to the buyer�s incentive compatibility and individual rationality constraints:
pjnajn � wjn � pjna
kn � wkn; j; k 2 fH;Lg (34)
pjnajn � wjn � 0; j 2 fH;Lg (35)
18

As a benchmark, if sellers could observe the signals, i.e., fsigni=1 2 �n, then the optimal
(or expected pro�t maximizing) o¤er is: ~ajn = pjn=� and ~w
jn = p
jn~ajn when sn = j 2 fH;Lg.
It also follows from Corollary 1 that there is asymptotically complete learning.
But with incomplete information, the optimal contract may be either separating or pool-
ing. Under the preference assumptions of this example, in the optimal separating contract
the incentive constraints are only binding downwards (i.e., bind only for the high-type con-
sumer with sn = H), while the individual rationality constraint is binding for the low-type
consumer. Thus, we can simplify the IC and the IR constraints as pHn aHn �wHn = pHn aLn �wLn
and pLnaLn � wLn = 0:
It is well known that inducing separation thus requires distorting the price-quality o¤er
for the low-type consumer relative to the complete information optimal o¤er; and, in the
extreme, it may be optimal to �price out�such consumer-types by settingaL�n ; w
L�n
�= h0; 0i
(Mussa and Rosen, 1978). The following Proposition characterizes the optimal contract
C�n(�n):
Proposition 4 For any 0 < � < 1 and for any �n; n 2 N :18
1. If �n <�0; 1
2�
�; then C�n(�n) is separating with�
aHn =pHn�; wHn = p
Hn a
Hn � aLn
�pHn � pLn
��(36)�
aLn =pLn�� Hn p
Hn
� (1� Hn ); wLn = p
Lna
Ln
�(37)
2. If �n 2�12�; 1�; thenC�n(�n) is separating with the pricing out of the low-type consumer:�
aHn =pHn�; wHn = p
Hn a
Hn
�;qL�n = 0; pL�n = 0
�(38)
Proposition 4 indicates that separating is optimal for all posterior beliefs on the under-
lying state. Thus, it follows from Corollary 1 that:
Corollary 2 Learning is asymptotically complete along the �� speci�ed in Proposition 4.
18We remark that �� � [(�(1 + �)� 1]=[(2�� 1)�], so that �� = 0 if � 2 (0:5;p5�12 ):
19

4.2 A Sequence of Investment Contracts
We consider next a sequential model of optimal investment contracting under asymmetric
information. Suppose that a new technology is introduced but its productivity is unknown.
Interpreting �generations,�n 2 N ; as a sequence of �rms that enter the industry, let xn man-
age or control a production technology owned by yn; this technology stochastically relates
capital investment an to output zn = [�(�h � �`) + �`] f(an) where f is twice continuously
di¤erentiable, strictly increasing and strictly concave, while � 2 f0; 1g is the unknown pro-
ductivity parameter, and �h > �` � 0.
There is a con�ict of interest between the two parties because xn derives private bene�ts
of control. Speci�cally, agents�preferences are:
UX(a; w; �) = w + 'a
UY (a; w; �) = [�(�h � �`) + �`] f(a)�Ra� w (39)
Here, the parameter 0 < ' < 1 models the the private bene�ts of control or utility from
�empire building�(Stulz, 1990; Hart, 1995) and R > 1 is the cost of capital.19 The preference
speci�cation in (39) is standard in this literature, and is adapted from Harris and Raviv
(1996). Notice that the preferences of type-X agents does not depend on the unknown state
�; i.e., the SCP does not apply strictly here. We will consider both the cases of discrete and
continuous signals.
4.2.1 Discrete Signals
Prior to the investment, xn receives a private signal sn 2 S = fH;Lg with � � gH1 = gL0 >12: Hence, conditional on �n,
Hn is speci�ed in (30), while the posterior type distribution
fpHn ; pLng conditional on sn is given in (31)-(32). Furthermore, we put
mn(s) � E(�jesn = s; �n)(�h � �`) + �` = (�h � �`) pn(sn;�n) + �`, s 2 S (40)
19Note that the complete-information optimal level of investment afb(�) satis�es[�(�h � �`) + �`] f 0(afb(�)) = R.
20

The bilateral contract between xn and yn speci�es a menu of investment levels and wage
payments hajn; wjniHj=L 2 R2
+: Here, in the optimal separating contract only the incentive
constraint for the low-type agent is binding. Hence, the optimal contract solves:
C�n(�n) 2 arg max
hajn;wjniHj=L
2A�Wn
f Hn�mn(H)f(a
Hn )�RaHn
�+(1� Hn )
�mn(L)f(a
Ln)�RaLn � wLn
�subject to,
wLn = '�aHn � aLn
�The optimal separating contract CS�
n (�n) is given by:
f 0(aHn ) =1
mn(H)
�1� Hn
�'
Hn+R
!; f 0(aLn) =
R� 'mn(L)
, wLn = '�aHn � aLn
�; wHn = 0
(41)
Now, the proposed contract in (41) is feasible i¤ aHn > aLn , i.e.,
1
mn(H)
�1� Hn
�'
Hn+R
!<R� 'mn(L)
(42)
With some manipulation (see the Appendix), (42) can be re-stated as (where � � �`�h��` ):
Z(�n) ��n + �h
(1��)�n(1��)�n+�(1��n)
i+ �
>R
R� ' (43)
Otherwise, the optimal pooling contract CP�n (�n) is given zero wages and action apooln such
that,
f 0(apooln ) [E(�j�n)(�h � �`) + �`]�R = 0 (44)
Proposition 5 For any 0 < �n < 1 and for any �n; n 2 N :
1. If �n 2 (��; �+) ; then the equilibrium is a separating equilibrium, i.e., C�n(�n) =
CS�n (�n) as given by (41).
2. If �n =2 (��; �+) ; then the equilibrium is a pooling equilibrium, i.e., C�n(�n) = C
P�n (�n)
as given by (44) where wLn = wHn = 0.
21

Notice that pooling occurs at the extreme levels of �n because
lim�!0
Z(�) = lim�!1
Z(�) = 1 <R
R� ' . (45)
At �rst, this might seem similar to the result in the herding literature that information
aggregation ceases at the extremes of prior beliefs. However, note that if � = 0, which is
true for the case �` = 0; then there is still pooling for su¢ ciently high priors on �, but there
is separating for low priors on � provided that � is su¢ ciently high.
Corollary 3 1. The boundary is �� = 0 if (1) �` = 0 and (2) � > R2R�' , but �
� > 0
otherwise.
2. The boundary �+ (��) is increasing (decreasing) in R and decreasing (increasing) in
'.
Hence, it follows from Proposition 5 and Corollary 1 that learning can not be asymptot-
ically complete in this model because information aggregation ceases once posterior beliefs
enter the pooling region.
Corollary 4 Learning is asymptotically incomplete along the �� speci�ed in Proposition 5.
Finally, we examine the case where gH1gH0= �
1�� becomes unbounded, i.e., � " 1. We have
(for � > 0)
lim�"1
�lim�!0
Z(�)
�= lim
�"1
�lim�!1
Z(�)
�= 1 (46)
That is, pooling in the extreme region of posterior beliefs is robust to unbounded private
beliefs when a high or low signal becomes almost perfectly revealing of the true state �.
Moreover, even at the point � = 1 (i.e., perfectly informative signals) the optimal contract is
one of pooling when ' is su¢ ciently high (yet still below R).20 This illustrates the situation
where unbounded private beliefs do not lead to asymptotically complete learning because of
the con�ict of interest between the two parties.
20Namely when '2 + '(2R+ �n)� �nR > 0.
22

4.2.2 Continuous Signals
We consider next the case of a continuous distribution of signals fsng1n=1, with S =[sL; sH ].
Here, the private beliefs that � = 1 of xn given �n and the signal sn are given by (2) and
n(sn = s;hn) = g1(s)�n+g0(s)(1��n): The bilateral contract between xn and yn speci�es a
menu of investment levels and wage payments han(�); wn(�)i : S ! R2+: Here, in the optimal
separating contract the upward incentive constraint is binding. Hence, the optimal contract
solves:
C�n(�n) 2 arg max
an(s);wn(s)
Z n(s;hn) [mn(s)f(an(s))�Ran(s)� wn(s)] ds
subject to,
wn(s) + 'an(s) = wn(s0) + 'an(s
0) for all s; s0 2 S (47)
(where, mn(s) is de�ned in (40)). Since wages in (47) are determined by highest action an,
one can show that under the optimal contract there exists a maximum level of investment
�an such that:
han(s); wn(s)i =
8<: h�an; 0i for s 2 [�s(�an); sH ]
ha�n(s); ' (�an � a�n(s))i for s 2 [sL; �s(�an)](48)
where, a�n(s) is given by:
f 0(a�n(s)) =R� 'mn(s)
; s 2 [sL; �s(�an)] (49)
and �s(�an) satis�es:
mn(�s(�an)) =R� 'f 0(�an)
. (50)
One can now analyze the optimal �a�n, where �s(�an) and a�n(s) are given by (49) and (50) (see
Appendix). Pooling occurs when the solution is �an = aPn de�ned by:
f 0(aPn ) [E(�j�n)(�h � �`) + �`]�R = 0 (51)
23

We conclude:
Proposition 6 There exist 0 � ��� < ��+ � 1 such that for any �n; n 2 N :
1. If �n 2����; ��+
�, then C�
n(�n) = CS�n (�n) and is characterized by (48)-(50) for �a
�n >
aPn .
2. If �n =2����; ��+
�, then C�n(�n) = C
P�n (�n) and is characterized by (51), where wn(s) =
0 for s 2 S.
Hence, it follows from Proposition 6 that learning can not be asymptotically complete in
this model because information aggregation ceases once posterior beliefs enter the pooling
region.
Corollary 5 Learning is asymptotically incomplete along the �� speci�ed in Proposition 6
5 Summary and Conclusions
The aggregation of dispersed information has been a central concern in economics. The
literature on herding shows that if agents make decisions individually and sequentially af-
ter observing previous decisions, then there can be herding on the wrong decisions where
agents eventually completely ignore their private information even if it is inconsistent with
the decision. However, there are many situations where groups of informed and uninformed
agents sequentially make decisions based both on intragroup communications and the ob-
served decisions of previous groups. In such environments, agents with private information
on the underlying state can be provided incentives for communication by other uninformed
agents through bilateral contracting or mechanism design.
It would appear that the ability to design incentives for truthful communication of private
information reduces the likelihood of herding on the wrong decision. This is because, unlike
the single-agent decision making situation, in a multi-agent situation the informed agents
can not autonomously decide to suppress their information; the uninformed agents in each
group (who design the incentive contracts) must also implicitly agree to suppress by not
24

designing information-inducing incentive contracts. However, we �nd that contracting with
communication both facilitates and impedes (asymptotic) information aggregating relative
to the single agent decision making situation. While the received literature indicates that
there will be herding with bounded beliefs (where there is a maximum information content of
signals) but complete learning asymptotically with unbounded beliefs, we �nd, in contrast,
that information can be asymptotically complete with bounded beliefs while there may be
herding with unbounded beliefs. In particular, there is herding on the wrong decision because
there exist equilibrium paths where optimal contracts do not induce any information from
the informed agents, even though these agents can receive private signals of unbounded
precision. Indeed, it is possible that the private signals of agents are not used in decisions
even in the early rounds, irrespective of whether there are bounded or unbounded beliefs;
this is again in contrast to the results in the literature.
Long run information aggregation when groups with dispersed information take actions
based on intra-group communications observed decisions of other groups depends on whether
it is cost-e¢ cient to induce information from the informed agents (within the group). This
depends not only on the precision (or information content) of private signals but also on
the con�icts of interest between the informed and the uninformed agents. Of course, the
incentive e¢ ciency of information elicitation is endogenous and, in an observational learning
setting, depends on the observed history of contract-based decisions by other groups. We
highlight the dependence of the optimal contracts on the endogenous posterior beliefs on
the unknown state and derive su¢ cient conditions on preferences and signal structures that
ensure complete learning in the long run. Some of these conditions are novel (for example,
a monotone hazard rate restriction on posterior beliefs) while some of the other conditions
are used in the optimal contracting literatures for moral hazard even though there are no
unobservable actions in our model. Through examples we show, however, that these condi-
tions may not apply in many interesting economic settings and herding can will occur if the
con�icts are su¢ ciently high.
25

Appendix
Proof of Proposition 1: By de�nition each �� speci�es for each n 2 N the possibly ran-
domized decision rule ��n(mn; hn) and the corresponding support ��n(s; hn) of the conditional
distribution Q(��n(mn; hn)) of decision dn. It is convenient to assume initially that ��n(mn; hn)
is deterministic, for the argument is then extended straightforwardly to behavioral strategies
or mixtures over the deterministic decision rules. Now, for any decision at stage n 2 N ,
dn � (an; wn) 2 A�Wn, de�ne �n(dn;hn) = fs 2 S j dn 2 ��n(s; hn)g. Then by Bayes�
rule,
�n+1 = Pr(� = 1 dn; hn) =
�n
0B@ Z�n(dn;hn)
g1(s)ds
1CA�n
0B@ Z�n(dn;hn)
g1(s)ds
1CA+ (1� �n)0B@ Z�n(dn;hn)
g0(s)ds
1CA(52)
But if C�n(hn) = CP�n (hn), then by de�nition
�n(dn;hn) = S: Hence, from (52), it follows
that
�n+1 = Pr(� = 1 dn; hn) =
�n
0@ZS
g1(s)ds
1A�n
0@ZS
g1(s)ds
1A+ (1� �n)0@ZS
g0(s)ds
1A (53)
=�n
�n + (1� �n)= �n
Because this applies for any deterministic ��n(mn; hn); it follows that the statement is true
for any randomizes decision rule as well.
Proof of Corollary 1: Note that if C�n = CS�n (hn) � CB�
n (hn), then by de�nition,
�n(dn;hn) � S for every dn 2 A�Wn. And since the probability measures G1(s) and
G0(s) are non-identical (conditional on �) by assumption, it follows from (52)-(53) that for
26
any hn; n 2 N ;
Pr(���
n+1 = ���
n ) =
8<: 1 if C�n(hn) = C
P�n (hn)
< 1 if C�n(hn) = CS�n (hn)�CB�n (hn)
(54)
Thus, if hn; n 2 N ; is such that ���n < 1, for C�n(hn) = CP�n (hn), then ���n+i = ��
�n ;
i = 1; 2; :::;with probability 1. Hence, the �rst part of the Corollary then follows from
the de�nition of asymptotic complete learning (cf. (7)), since
limn!1
Pr(���
n = � �) < 1 (55)
Next, suppose that C�n(hn) = C
S�n (hn) �CB�
n (hn) for each n 2 N . Then, conditional on �,
the sequence of posterior beliefs f���n g is independent under the probability measures G1(s)
and G0(s): Furthermore, by the de�nition of conditional expectations, f���n g are Martingales.
It follows from the Martingale convergence theorem that f���n g must converge to some inte-
grable ���; and since G1(s) and G0(s) are mutually singular (see, e.g., Billingsley (1979, pp.
409-410), it must be the case that ���= 1 if � = 1 (or ��
�= 0 if � = 0).
Proof of Proposition 2: A straightforward application of the implicit function theorem
on (20) yields:
_a�n(s) /YXi=X
@2Kin(an(s); s;�n)
@an@s�@ 1��n(s;�n)
n(s;�n)
@s
@ _JXn (an(s); s;�n)
@an�
1� �n(s;�n) n(s;�n)
@2 _JXn (an(s); s;�n)
@an@s(56)
But if the MLRP applies then:
YXi=X
@2Kin(an(s); s;�n)
@an@s=
YXi=X
_pn(s;�n)[ui(an(s); 1)� ui(an(s); 0)] � 0 (57)
27

Next, if the MLRP and SCP apply, then
@ _JXn (an(s); s;�n)
@an= _pn(s;�n)[u
X1 (an(s); 1)� uX1 (an(s); 0)] � 0 (58)
Hence, in addition to MLRP and SCP if the PMHRP also applies then,
@ 1��n(s;�n) n(s;�n)
@s
@ _JXn (an(s); s;�n)
@an� 0
Finally, if the CLRP holds, then �pn(s;�n) � 0; and hence,
@2 _JXn (an(s); s;�n)
@an@s= �pn(s;�n)[u
X(an(s); 1)� uX(an(s); 0)] � 0 (59)
The Proposition then follows from (56).
Proof of Theorem 1 : It follows from (56) that _a�n(s) > 0 for each s in the interior of S
if at least of the assumed conditions holds strictly. Hence, ��n(s; hn) is separating in s and
since this holds for any �n; C�n(hn) = C
S�n (hn): The conclusion then follows from Corollary
1.
Proof of Proposition 3: We �rst show that if the incentive compatible constraint for the
low-type is binding, then the corresponding incentive constraint is non-binding. Now de�ne
for j; k 2 fH;Lg
�j;kn � pjnu
X(ajn; 1) + (1� pjn)uX(ajn; 0) + wjn �
pjnuX(akn; 1) + (1� pjn)uX(akn; 0) + wkn
Note that if the IC constraint is binding for the low-type then �L;Hn = 0: Hence, �H;L
n > 0
if �H;Ln +�L;H
n > 0: But
�H;Ln +�L;H
n = (pHn � pLn)�(uX(aHn ; 1)� uX(aHn ; 0))�
uX(aLn ; 1)� uX(aLn ; 0))�
(60)
28

But (pHn � pLn) > 0 from the MLRP and the expression inside the square parentheses in (60)
can be re-written as
(uX(aHn ; 1)� uX(aLn ; 1))� (uX(aHn ; 0)� uX(aLn ; 0)) > 0
using the SCP. It is then straightforward to show that the IR constraint is binding for the
low-type in any optimal separating contract.
Proof of Theorem 2: Using Proposition 3, we can eliminate the transfers wjn; j = H;L;
and write the optimal contracting problem as:
maxhajniH
j=L2Af Hn [pHn uY (aHn ; 1) + (1� pHn )uY (aHn ; 0) + pLnuX(aHn ; 1) + (1� pLn)uX(aLn ; 0)] +
(1� Hn )[YXi=X
pLnui(aLn ; 1) + (1� pLn)ui(aLn ; 0)]g (61)
The remaining argumentation is given in (24)-(26).
Proof of Proposition 4: Since the individual rationality constraint is binding for the low-
type consumer, we have, pLnaLn = wLn ; and since the incentive compatibility constraints are
only binding downwards, aHn (pHn � pLn) + wLn = wHn : Substituting these conditions in (33)
and ignoring, for the moment, the non-negativity restrictions on an; the optimal contract
maximizes:
OBJ = Hn
�pHn a
Hn � pHn aLn + wLn �
�(aHn )2
2
�+�1� Hn
��pLna
Ln �
�(aLn)2
2
�(62)
The �rst order conditions are
@OBJ
@aHn= Hn
�pHn � �aHn
�@OBJ
@aLn= � Hn pHn +
�1� Hn
� �pLn � �aLn
�Solving these and acknowledging the non-negativity constraints, we obtain the following
characterization of the optimal contract:
29

aHn =pHn�
aLn =
8<:pLn�� Hn p
Hn
�(1� Hn )if pLn >
Hn pHn
(1� Hn )
0 if pLn < Hn p
Hn
(1� Hn )
pLnaLn � wLn = 0
pHn aHn � wHn = pHn a
Ln � wLn (63)
Then substituting (31)-(32) in (63), and simplifying, yields the conclusions of the Proposition.
Proof of Proposition 5: The optimization problem is:
OBJ= Hn�mn(H)f(a
Hn )�RaHn
�+�1� Hn
� �mn(L)f(a
Ln)�RaLn � '
�aHn � aLn
��The �rst order conditions are
@OBJ
@aHn= Hn
�mn(H)f
0(aHn )�R���1� Hn
�'
@OBJ
@aLn= mn(L)f
0(aLn)�R + '
Separating is feasible for intermediate �n. To see this, note that the interior levels of invest-
ment in the low and high states (as provided by the �rst order conditions above) coincide
when,R� 'mn(L)
=1
mn(H)
�R +
�1� Hn Hn
�'
�=
R
�n (�h � �`) + �`
Thus, separating is feasible when,
Z(�n) ��n + �h
(1��)�n(1��)�n+�(1��n)
i+ �
>R
R� ' . (64)
The conclusions of the Proposition then follow from the foregoing.
Proof of Corollaries 3-4: Follows directly from Proposition 5.
30
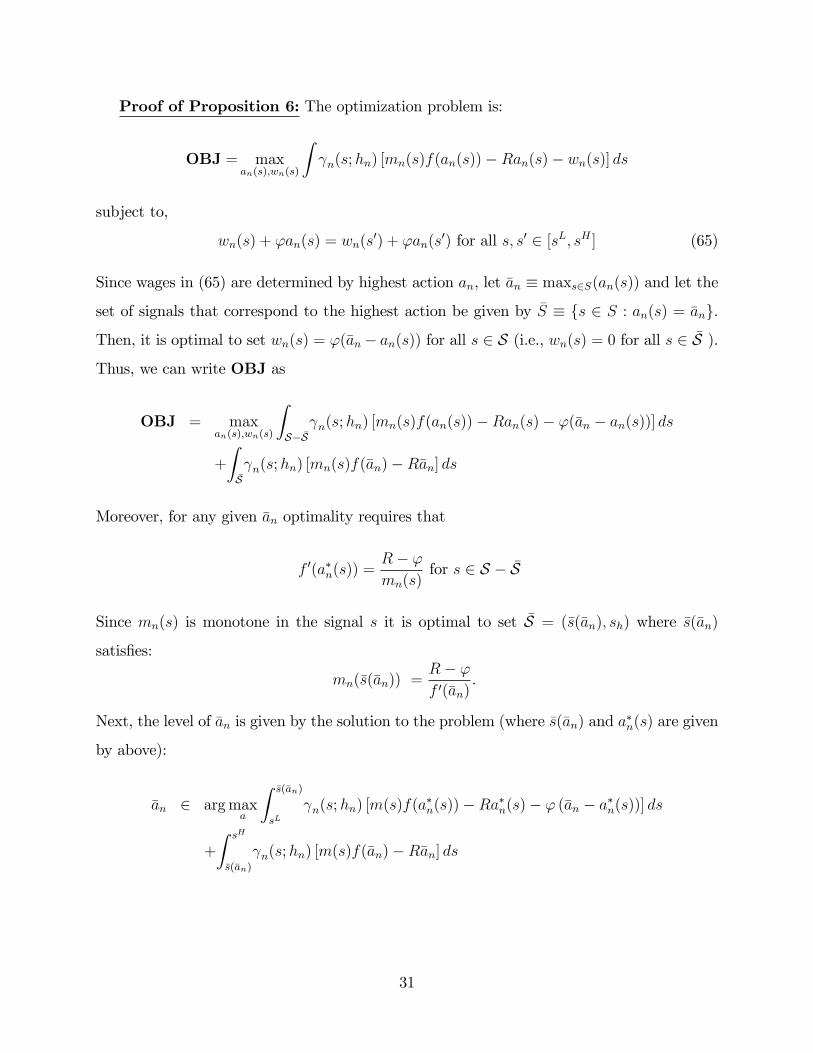
Proof of Proposition 6: The optimization problem is:
OBJ = maxan(s);wn(s)
Z n(s;hn) [mn(s)f(an(s))�Ran(s)� wn(s)] ds
subject to,
wn(s) + 'an(s) = wn(s0) + 'an(s
0) for all s; s0 2 [sL; sH ] (65)
Since wages in (65) are determined by highest action an, let �an � maxs2S(an(s)) and let the
set of signals that correspond to the highest action be given by �S � fs 2 S : an(s) = �ang.
Then, it is optimal to set wn(s) = '(�an� an(s)) for all s 2 S (i.e., wn(s) = 0 for all s 2 �S ).
Thus, we can write OBJ as
OBJ = maxan(s);wn(s)
ZS� �S
n(s;hn) [mn(s)f(an(s))�Ran(s)� '(�an � an(s))] ds
+
Z�S n(s;hn) [mn(s)f(�an)�R�an] ds
Moreover, for any given �an optimality requires that
f 0(a�n(s)) =R� 'mn(s)
for s 2 S � �S
Since mn(s) is monotone in the signal s it is optimal to set �S = (�s(�an); sh) where �s(�an)
satis�es:
mn(�s(�an)) =R� 'f 0(�an)
.
Next, the level of �an is given by the solution to the problem (where �s(�an) and a�n(s) are given
by above):
�an 2 argmaxa
Z �s(�an)
sL n(s;hn) [m(s)f(a
�n(s))�Ra�n(s)� ' (�an � a�n(s))] ds
+
Z sH
�s(�an)
n(s;hn) [m(s)f(�an)�R�an] ds
31

The �rst order conditions for optimality are:
0 = �'Z �s(�an)
sL n(s;hn)ds+
Z sH
�s(�an)
n(s;hn) [m(s)f0(�an)�R] ds
The second order conditions for optimality are:
0 = �'�s0(�an) n(�s(�an);hn) +Z sH
�s(�an)
n(s;hn) [m(s)f00(�an)] ds
��s0(�an) n(�s(�an);hn) [m(�s(�an))f 0(�an)�R]
=
Z sH
�s(�an)
n(s;hn) [m(s)f00(�an)] ds < 0
The �rst order condition simpli�es to:
0 = �'Pr(sn < �s(�an)jhn)Pr(sn > �s(�an)jhn)
+ f 0(�an)E(snjhn; sn > �s(�an))�R.
By de�nition f 0(�an) =R�'
mn(�s(�an))and we can write the �rst order condition for an interior
solution as,
R + 'Pr(sn < �s(�an)jhn)Pr(sn > �s(�an)jhn)
= [R� '] E(snjhn; sn > �s(�an))mn(�s(�an))
.
Pooling occurs at the corner solution �an = apooln de�ned by:
[E(�j�n)(�h � �`) + �`] f 0(apooln )�R = 0,
and is optimal when
R
R� ' >[E(�j�n)(�h � �`) + �`] f 0(apooln )
mn(sL).
or
R
R� ' >(�h � �`)�n + �`
(�h � �`) pn(sL;�n) + �`
=[(�h � �`)�n + �`]
��g1(s
L)� g0(sL)��n + g0(s
L)�
(�hg1(sL)� �`g0(sL))�n + �`g0(sL)� �Z(�n).
32
Thus, lim�n!0+�Z(�n) = lim�n!1�
�Z(�n) = 1 < RR�' , and pooling is optimal at extreme
levels of expected productivity.
Proof of Corollary 5: Follows directly from the above analysis.
33
References
Acemoglu, D., M. Dahleh, I. Lobel, and A. Ozdaglar, 2010, Bayesian learning in social networks,
Review of Economic Studies, 58, 1-34.
Aghion, P., P. Bolton, C. Harris, and B. Jullien, 1991, Optimal learning by experimentation, Review
of Economic Studies, 58, 4, 621-54.
Bannerjee, V., 1992, A simple model of herd behavior, The Quarterly Journal of Economics, 107,
797-817.
Bikhchandani, S., D. Hirshleifer, and I. Welch, 1992, A theory of fads, fashion, custom, and cultural
change as informational cascades, The Journal of Political Economy, 100, 992-1026.
Billingsley, P., 1979, Probability and measure, Wiley (New York, NY).
Breiman, L., 1968, Probability, Addison-Wesley (Reading, MA).
Eyster, E., and M. Rabin, 2009, Rational and naive herding, Working paper, University of California-
Berkeley
Fudenberg, D., and J. Tirole, 1991, Game theory, MIT Press (Cambridge, MA).
Gompers, P., and J. Lerner, 1999, The Venture Capital Cycle, MIT Press (Cambridge, MA).
Harris, M. and A. Raviv, 1996, The capital budgeting process: Incentives and information, Journal
of Finance, 51, 1139-1174.
Hart, O. 1995, Firm, contracts and �nancial structure. London: Oxford University Press.
Hadley, G. and M. Kemp, 1971,Variational Methods in Economics, Amsterdam:
North-Holland.
Holmstrom, B. and R. Myerson, 1983, E¢ cient and durable decisions with incomplete information,
Econometrica, 51, 1799-1899.
Jewitt, I., 1988, Justifying the �rst-order approach to principal-agent problems, Econometrica, 56,
1177-1190.
Kumar, P., 2002, Price and quality discrimination in durable goods monopoly with resale trading,
International Journal of Industrial Organization, 30, 1313-1339.
Kumar, P., 2006, Intertemporal price-quality discrimination and the Coase conjecture, Journal of
Mathematical Economics, 42, 896-940.
34
Lee, In-Ho., 1993, On the convergence of informational cascades, Journal of Economic Theory, 61,
395-411.
Maskin, E. and J. Riley, 1984, Monopoly with incomplete information, Rand Journal of Economics,
15, 171-196.
Milgrom, P. and C. Shannon, 1994, Monotone comparative statics, Econometrica 62, 157-180.
Mirrlees, J., 1971, An exploration in the theory of optimal income taxation, Review of Economic
Studies, 38, 175-203.
Mussa, M. and S. Rosen, 1978, Monopoly and product quality, Journal of Economic Theory, 18,
301-317.
Myerson, R., 1979, Incentive compatibility and the bargaining problem, Econometrica, 47, 61-73.
Myerson, R., 1981, Optimal auction design, Mathematics of Operations Research, 6, 58-63.
Rob, R., 1991, Learning and capacity expansion under demand uncertainty, Review of Economic
Studies, 58, 655-75.
Rogerson, W., 1985, The �rst-order approach to principal-agent problems, Econometrica, 53, 1357-
1367.
Smith, L., and P. Sørensen, 2001, Pathological outcomes of observational learning, Econometrica,
68, 371-398.
Stulz, R., 1990, Managerial discretion and optimal �nancing policies, Journal of Financial Eco-
nomics 26, 3-27.
Strausz, R, 2006, Deterministic versus stochastic mechanisms in principal-agent theory, Journal of
Economic Theory, 128, 306-314.
Varian, H., 1989, Price discrimination. In Schmalensee, R., Willig, R. (Eds.), Handbook of indus-
trial organization, Volume 1. (North-Holland, Amsterdam).
Wilson, R., 1993, Nonlinear pricing, Oxford University Press (Oxford, UK).
Zeira, J., 1987, Investment as a process of search, Journal of Political Economy, 95, 204-210.
Zeira, J., 1994, Informational cycles, Review of Economic Studies, 61, 31-44.
35




















