Esnek Uzuvlu Manipülatörlerin Pozisyon Kontrolünde PI Tipi Bulanık Mantık Kontrolör...
8
Transcript of Esnek Uzuvlu Manipülatörlerin Pozisyon Kontrolünde PI Tipi Bulanık Mantık Kontrolör...


Rijit Bir Uydu İçin Durum Geri Besleme Denetim Algoritması Tasarımı
N. Bilgin, M. U. Salamcı……………………………………………………………………
429 Az tahrikli Parmak Mekanizmasının Kinematik ve Kinetik Analizi
Ö. F. Ergin, Ş. Su, İ. Uzmay………………………………………………………………….. 435
Yeni Bir Uyarlamalı-Gürbüz Kontrolcü Geliştirilmesi Ve Üç Boyutlu Bir Mekanik
Manipülatöre Uygulanması
R. Burkan, Ö. C. Özgüney……………………………………………………………………. 445
Krank Pres Mekanizması:Kinematik Analizi ve Benzetimi
R. Halıcıoğlu, L. C. Dülger…………………………………………………………………... 451
Kompozit Plakların Vibro-Akustik Analizi
Erkan Karagözlü, A. Saide Sarıgül…………………………………………………………… 459
Düzlemsel Dört-Çubuk Mekanizmasının Genetik Algoritma İle Optimum
Dengelenmesi
S. Erkaya……………………………………………………………………………………… 469 Titreşim Ve Gürültü Analizi İle Fan Hatalarının İncelenmesi
Ş. Ulus, S. Erkaya…………………………………………………………………………….. 476 Cam Silme Robotu Tasarımı
S. Beller, E. Türkeş…………………………………………………………………………… 482 Alüminyum Profilli Yapıların Sonlu Eleman Analizi
S. Güler, H. Karagülle, M. Akdağ, L. Malgaca……………………………………… 491
Düz Dişli Çarklarda Hata Teşhisinde İstatistiksel Proses Kontrol Yönteminin
Kullanılabilirliği
S. Maraş, H. Arslan…………………………………………………………………………... 499
Tornalamada Kesme Parametrelerinin Yüzey Pürüzlülüğü Üzerine Olan Etkilerinin
Taguchı Metodu İle İncelenmesi Ve Optimizasyonu
S. Neşeli, E. Türkeş 508 Kalman Kestirimcisi İle DC Motor Açısal Hız Kontrolü
Ş. Arslan, G. Mühürcü……………………………………………………………………….. 515
İçten Yanmalı Bir Motorun Çevrim Şekillendirme Metodu İle Dayanıklı Hız Kontrolü
Ş. Arslan, Ö. Alpan…………………………………………………………………………... 522
İçten Yanmalı Bir Motorun Dayanıklı Hız Kontrolü
Ş. Arslan, Ö. Alpan…………………………………………………………………………… 527
Bir Tepe Vinç Modeli İçin Dayanıklı Kontrol Yönteminin Uygulanması
Ş. Arslan, S. Uygurlu…………………………………………………………………………. 534
Bir Aktif Süspansiyon Sisteminin Dayanıklı Kontrolü
Ş. Arslan, S. Uygurlu………………………………………………………………………… 544 Bir Yılansı Robotun Dinamik Analizi ve Kontrolü
T. Abut, S. Soygüder, H. Alli………………………………………………………………… 554
Esnek Uzuvlu Manipülatörlerin Pozisyon Kontrolünde PI Tipi Bulanık Mantık
Kontrolör Kullanılması
Ü. Hayta, S. Kapucu, E. Yeşil………………………………………………………………… 564

16. ULUSAL MAKİNA TEORİSİ SEMPOZYUMU Atatürk Üniversitesi, Mühendislik Fakültesi, 12-13 Eylül, 2013
564
ESNEK UZUVLU MANİPÜLATÖRLERİN POZİSYON KONTROLÜNDE PI TİPİ BULANIK MANTIK KONTROLÖR KULLANILMASI
Ünal HAYTA*, Sadettin KAPUCU*, Engin YEŞİL**
*Gaziantep Üniversitesi, Mühendislik Fakültesi, Makine Mühendisliği Bölümü 27310, GAZİANTEP
**İstanbul Teknik Üniversitesi, Elektrik-Elektronik Fakültesi, Kontrol Mühendisliği Bölümü 34390,İSTANBUL
[email protected], [email protected], [email protected]
ÖZET
Bu çalışmada PI tipi bulanık mantık kullanılarak esnek uzuvlu manipülatörlerin kapalı çevrim pozisyon kontrolü çalışılmıştır. Esnek manipülatör modeli için ise Euler-Bernoulli kiriş teorisi kullanılmıştır. Çalışmanın amacı geleneksel PI kontrolöründe olduğu gibi oransal ve entegral katsayılarını ayarlayarak istenilen hareket profilini elde edilmesidir. Bulanık mantık kurallarının değer aralıkları normalleştirilerek kullanılmıştır. Önerilen yöntem esnek manipülatör modeline uygulanarak benzetim sonuçları LQR kontrolörünün sonuçları ile karşılaştırılmıştır. Anahtar Kelimeler: Bulanık mantık kontrolcü, Ensek manipülatör
PI TYPE FUZZY CONTROLLER FOR POSITION CONTROL OF FLEXIBLE MANIPULATORS
ABSTRACT
In this study, close loop position control of single link flexible manipulator is studied. For modeling of the flexible manipulator Euler-Bernoulli beam theory is used. The close loop control of the link is achieved by PI type fuzzy logic controller. The purpose of the study is tuning the coefficients of the PI type fuzzy controller like in conventional PI controller. The universes of discourse of the fuzzy rules are normalized. Proposed method is applied to the flexible link manipulator and simulation results are compared with LQR controller’s simulation results. Keywords: Fuzzy logic controller, Flexible manipulator
1. GİRİŞ
Düşük kütle, yüksek operasyon hızı, düşük enerji tüketimi, yüksek yük taşıma kapasitesi, geniş operasyon aralığı gibi birçok avantajı sayesinde başta uzay teknolojileri olmak üzere robotik faaliyetlerin yoğun olduğu sektörlerde esnek uzuvlu manipülatörler önemli roller oynamaktadır. Ancak dinamik yapısının doğrusal olmaması ve esnek bir yapıya sahip olması manipülatörün kontrolünü zorlaştıran en önemli faktörlerdendir.
Esnek uzuvlu manipülatörün kontrolü için birçok yöntem uygulanmıştır. Girdi–çıktı doğrusallaştırması, PD kontrolü, uyarlamalı kontrol, yapay sinir ağları ile kontrol, kayan
kipli kontrol, tekil perturbasyon kontrol bunların başlıca örnekleridir[1]. Ancak tüm bu yöntemlerde sistem dinamiği ve doğrusallıktan sapmalar önceden bilinmelidir. Bu kontrol yöntemlerin dışında bulanık mantık ile kontrol ise önceki tecrübelerimizden sistematik bir şekilde kontrolcü tasarlama olanağı sağlamaktadır. Sreenatha ve Pradhan [2], doğru akım servo motor ile sürülen esnek uzuvlu manipülatörün bulanık mantık ile pozisyon kontrolünü sağlamıştır. Subudhi ve Morris [3], düzenlenmemiş PD tipi bulanık mantık ve uyarlamalı bulanık mantık kontrolörü kullanmıştır. Renno [4], genelleştirilmiş ters dinamik tabanlı bulanık mantık kontrolörünü pozisyon kontrolünde kullanmıştır. Hasan, Ibrahimy ve Reaz [5],

Hayta, Kapucu ve Yeşil
565
bulanık mantık kontrolörünü esnek uzuvlu manipülatörün titreşim ve pozisyon kontrolünde kullanmış, sonuçlarını LQR kontrolörünün sonuçları ile karşılaştırmıştır.
Tüm bu çalışmalara ilave olarak bu çalışmamızda normalleştirilmiş iki adet PI tipi bulanık mantık kontrolörü kullanılarak esnek uzuvlu manipülatörün titreşim ve pozisyon denetimi amaçlanmış çıkan sonuçlar LQR kontrolörünün verdiği sonuçlar ile karşılaştırılmıştır.
2. ESNEK MANİPÜLATÖR MODELİ
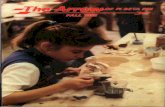
Esnek uzuvlu manipülatörlerin modellenmesi için çeşitli teknikler geliştirilmiştir[6-11]. Şekil 1 de dönen bir motorun miline sıkıca bağlanmış olan tek uzuvlu esnek manipülatör modeli gösterilmektedir.
Şekil 1
Dinamik modelleme için Euler-Bernoulli kiriş modeli kullanılmıştır. Kiriş boyunca alan eylemsizlik momenti ve kirişin yoğunluğu değişmemektedir. Buna göre esnek uzuvlu manipülatörün hareket denklemi [12-16]:
tmxt
txym
x
txyEI
2
2
4
4 ,, (1)
Eşitlik (1) de gösterilen kısmı diferansiyel denkleminde (PDE) E elastiklik modülünü, I alan atalet momentini, m birim uzunluktaki
kütleyi, t açısal yer değiştirmeyi, txv ,
elastik sapmayı, tmx birim uzunluktaki
eylemsizlik kuvvetini ve txy , dönme ekseninden x kadar uzaklıktaki toplam sapmayı vermektedir(bkz. eşitlik 2).
txvtxtxy ,, (2)
Eşitlik (1) in modal analiz ile çözümü için eşitlik (3) deki modların toplanması metodu kullanılmıştır.
tqxtxy j
n
jj
1
, (3)
Eşitlik (3)’de n normal mod sayısını, tq j , j
‘inci genelleştirilmiş koordinatları ve xj ise
j ‘inci mod şeklini verir. Denklem (1) deki hareket denkleminden genelleştirilmiş koordinatlar ve diklik konseptini kullanarak denklem (4) elde edilmiştir.
tqqwq jjjjj 22 (4)
Bu denklemde j , j ‘inci doğal frekansı
simgeler ki açık yazıldığı takdirde
42 / mLEILjj . Bu denklemdeki
Lj öz değerleri, sönümleme katsayısını
ve denklem (5)’de detayı verilen ise modun genelleştirilmiş kütleye etkisini verir[14].
L
j
L
j
dxxmx
dxxxm
0
2
0
(5)
En yüksek titreşimin genliği uzvun birinci modundaki genliktir[13-15]. Diğer modların titreşim genliklerine katkıları göz ardı edilecek kadar azdır. Bu yüzden çalışmada sadece birinci mod genliği kullanılacaktır.
Kullanılacak DC servo motorun hareket denklemleri ise:
)(tvKRidt
diL e (6)
iKBJ t (7)
Eşitlik (6) ve (7) deki J motorun kütle atalet momenti, B sönümleme oranını, te KKK
elektromotor kuvvet sabitini, R direnci, L indüktansı, V girdi voltajını, ise motor milinin açısını vermektedir.

Hayta, Kapucu ve Yeşil
566
3. BULANIK MANTIK KONTROLÖRÜNÜN TASARLANMASI
Bu çalışmada iki adet bulanık mantık kontrolörü kullanılmıştır. Bunlardan biri motor milini istediğimiz referans sinyalini takip etmek için diğeri ise uzvun uç noktasındaki titreşimi sıfır yapacak olan kontrolörlerdir. Her iki kontrolöre de girdi sinyali olarak hata ve hatanın türevini birer ölçekleme çarpanı ile çarpılmış hali verilmektedir. Şekil 1 de
görüldüğü gibi çıkış sinyali yine bir ölçekleme sinyali ile çarpılıp entegrali alınarak sisteme gönderilir. Sonuçta PI tipi bulanık mantık kontrolörü elde edilmiş olur[17].
Şekil 1 de görülen K1, K2 ve K3 ölçekleme faktörlerini değiştirerek PI kontrolörünün performansı iyileştirilebilinir. Ancak bu katsayıların belirlenmesine dair analitik bir yöntem mevcut değildir [17].
Şekil 1
Bulanık mantık kontrolöründe dokuz kurallı tekli yapıda bir bulanık kural tabanı seçilmiştir.
Tablo1. Bulanık mantık kural tabanı
Hata (e)
Hatanın Türevi
)(e
N Z P N -1 -0.8 0 Z -0.8 0 0.8 P 0 0.8 1
Bulanık PI kontrolörünün giriş sinyali için üçgen üyelik fonksiyonu kullanılmış ve tanım uzayı (-1,1) aralığında tanımlanmıştır.
(a)
(b)
Şekil 2: Bulanık mantık üyelik fonksiyonları (a) girdi sinyali için, (b) çıkış sinyali için
4. BENZETİMLER
Tek uzuvlu esnek manipülatörün bulanık mantık kontrolörü ile pozisyon ve titreşim kontrolü için SIMULINK programı kullanılmıştır. Tek uzuvlu esnek manipülatör ve uzvun bağlı olduğu DC servo motorun hareket denklerini bir birine eklenip durum uzayları matrisi elde edilmiştir.
DuCxy
BuAxx
(8)
Eşitlik 8 de gösterilen durum uzayları denklemindeki katsayılar aşağıdaki gibidir.
84.0441/12.00/12.0
10000
00/0/
00100
00/0/
JBJK
JBJK
JKJR
A
0
0
0
0
/1 L
B
01000
00010C
0
0D (9)
Eşitlik (9) da verilen katsayılar Simulink ortamında blok haline getirilmiştir. Bu bloğun iki çıktısı vardır. Birincisi motor milinin açısı, ikincisi ise uzvun uç noktasının titreşimidir. Kontrol için oluşturulacak blok diyagramında

Hayta, Kapucu ve Yeşil
567
sistemin iki çıktısı referans değerlerinden farkı alınarak iki farklı hata oluşturulmakta ve bu iki hata bulanık mantık kontrolörüne girmektedir. Bulanık mantık kontrolöründen çıkan kontrol sinyalleri toplanarak sisteme voltaj girdisi olarak verilmektedir (Şekil 3).Benzetim için kullanılan değerler ise tablo 2 de verilmiştir.
Tablo 2: Benzetimde kullanılacak değerler
Sembol Değer
Manipülatör uzunluğu L(m) 0.7 Kesit alanı genişliği w(m) 0.002
Kesit alanı yüksekliği h(m) 0.0255 Elastisite katsayısı E(Gpa) 71
Birim uzunluktaki kütle m(kg/m) 0.1382 Birinci mod frekansı ω1(rad/s) 21 Motorun kütle atalet
momenti J(kgm^2) 3.2284e-6
Sönümleme oranı B(Nms) 3.5077e-6 Elektromotor kuvvet sabiti K(Nm/Amp) 0.0274
Direnç R(ohm) 4 İndüktans L(H) 2.75e-6
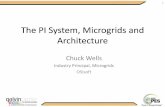
Şekil 3 de görüldüğü gibi sisteme girdi olarak pozisyon bir radyan ve titreşim değeri için ise sıfır verilmiştir.
Önerilen kontrolörün geleneksel yöntemlere göre daha iyi cevap verdiğini göstermek için aynı sistem LQR kontrolörü ile kontrol edilmiştir. LQR kontrolörü ile benzetim için Matlab m-file oluşturulmuştur. Burada kullanılan Q ve R matrisleri aşağıdaki gibidir.
00000
01000
00000
00010
00000
'CCQ 1R
Kontrolörlerin tasarlanması için ana kıstas ise açısal pozisyon referans değerini aşmamasıdır. Bu kıstasa göre bulanık mantıkta K1, K2, K3 katsayıları ve LQR kontrolöründe ise Q matrisinin düzenlenmesi sonucu aşağıdaki grafikler elde edilmiştir.
Şekil 3
(a)
(b)
Şekil 4: Açısal Pozisyon referans değerini aşmadığı durumdaki (a) açısal pozisyon, (b) uç nokta salınımı
0
0,2
0,4
0,6
0,8
1
1,2
0 1 2 3 4 5Mot
orun
Açı
sal P
ozis
yonu
(r
adya
n)
Zaman(saniye)
LQR
Bulanık Mantık
-0,018
-0,013
-0,008
-0,003
0,002
0,007
0,012
0 0,2 0,4 0,6 0,8 1 1,2 1,4 1,6 1,8 2
Uç
Nok
ta S
alınımı (
m)
Zaman (saniye)
LQR
Bulanık Mantık

Hayta, Kapucu ve Yeşil
568
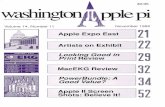
Daha hızlı bir LQR kontrolörü kullanıldığında bulanık mantık kontrolörüne göre daha hızlı cevap vermektedir ancak uç nokta salınımı daha fazla olmaktadır.
(a)
(b)
Şekil 5: Daha hızlı bir LQR kullanıldığındaki (a) açısal pozisyon (b) uç nokta saılınımı
5. SONUÇLAR
Girişte bahsedildiği gibi kontrol etmek istenilen sistemin dinamik modeli olmadığı durumlarda bulanık mantık kontrolörü kişisel deneyimler ile kontrolör tasarlamamıza olanak sağlamaktadır. Bulanık mantık kurallarının tanım uzayının (-1,1) aralığında verilmesi ise bulanık mantık kontrolörünün kullanımını büyük ölçüde kolaylaştırmaktadır. Benzetim çalışmalarında da görüldüğü gibi bulanık mantık kontrolörü LQR kontrolörüne göre daha hızlı cevap vermektedir. Ancak uç nokta salınımı LQR’a göre daha büyüktür. İlerleyen çalışmalarda K1, K2 ve K3 katsayılarının optimum değerleri bulunmaya çalışılarak en hızlı ve en az salınım yapacak şekilde pozisyon değişimi yapılmaya çalışılacaktır.
6. KAYNAKLAR
1. Benosman M., Vey G.L., “Control of flexible manipulators: A survey” Robotica, vol.22, s.533-545, 2004
2. Sreenatha A. G., Pradhan M., “Fuzzy logic controller for position control of flexible structures”, Acta Astrounautica Vol.50, No.11, s.665-671, 2002
3. Subudhi B., Morris A. S., “Fuzzy and neuro-fuzzy approaches to control a flexible single-link manipulator”, Proc. Instn Mech. Engrs Vol.217, part I: J, Systems and Control Engineering
4. Renno J. M., “Inverse dynamics based tuning of a fuzzy logic controller for a single-link flexible manipulator”, Journal of Vibration and control 13:1741, 2007
5. Hasan M. A., Ibrahimy M. I., Reaz M. B. I., “A single link flexible manipulator control using fuzzy logic”, International Journal of Electronics, Electrical and Communication Engineering, s.13-21, 2009
6. Hastings G., Book W., “A linear dynamic model for flexible robotic manipulators,” Control Systems Magazine, IEEE, vol.7, no.1, s.61-64, 1987
7. Book W.J., “Modeling, design, and control of flexible manipulator arms: a tutorial review” Decision and Control, Proceedings of the 29th IEEE Conference, s.500-506 vol.2, 1990
8. Martins J. M., Mohamed Z., Tokhi M. O., Sa da Costa J., Botto M. A., “Approaches for dynamic modeling of flexible manipulator systems,” Control Theory and Applications, IEEE Proceedings, vol.150, no.4, s. 401- 411, 2003
9. Tokhi M. O., Mohamed Z., Azad, A. K. M., “Finite difference and finite element approaches to dynamic modeling of a flexible manipulator”, Proceedings of IMechE-I: Journal of Systems and Control Engineering, Vol.211, s. 145-156. 1997
10. Meirovitch L., Elements of Vibration Analysis, McGraw Hill (1986)
11. Bellezza F., Lanari L., Ulivi G., “Exact modeling of the flexible slewing link”, IEEE
0
0,2
0,4
0,6
0,8
1
1,2
0 1 2 3 4 5
Mot
orun
Açı
sal P
ozis
yonu
(r
adya
n)
Zaman (saniye)
LQR
Bulanık Mantık
-0,05-0,04-0,03-0,02-0,01
00,010,020,03
0 0,2 0,4 0,6 0,8 1 1,2 1,4 1,6 1,8 2
Uç
Nok
ta S
alınımı (
m)
Zaman (saniye)
LQR
Bulanık Mantık
Hayta, Kapucu ve Yeşil
569
International Conference on Robotics and Automation, s.734-739 vol.1, 1990
12. Alnefaie K., Diken H., Alghamdi A., “Residual Vibration of a Rotating Flexible Beam Subject to Prescribed Motion” JKAU: Eng. Sci., Vol. 20 No. 2, s: 97-107, 2009
13. Shin K., Brennan M. J.,“Two simple methods to suppress the residual vibrations of a translating or rotating flexible cantilever beam”, Journal of Sound and Vibration, Vol.312, 2008
14. Ankarali A., Diken H., ”Vibration control of an elastic manipulator link”, Journal of Sound and Vibration, Vol.204, s.162-170, 1997
15. Diken H., “Vibration control of a rotating euler–bernoulli beam”, Journal of Sound and Vibration, Vol.232, s.541-551, 2000
16.Shan J., Liu H., Sun D., “Modified input shaping for a rotating single-link flexible manipulator”, Journal of Sound and Vibration, Vol.285, s.187-207, 2005,
17. Yeşil E., Öztürk C., Coşardemir B., Kumbasar T., “Bulanık PID kontrolörlerin eğitiminde durum tabanlı çıkarsama yaklaşımı”