
facultad de ingeniería de sistemas - ESCUELA POLITÉCNICA ...
Upload
khangminh22Category
view
6download
0
ESCUELA POLITÉCNICA NACIONAL
ESCUELA DE INGENIERÍA
"CONTROL AUTOMÁTICO DE UN PROTOTIPO DOSIFICADOR INDUSTRIALDE PINTURA DE CAUCHO"
PROYECTO PREVIO A LA OBTENCIÓN DEL TITULO DEINGENIERO EN ELECTRÓNICA Y CONTROL
LUIS LEONARDO PALIZ PULLES PATRICIO GONZALO BAYAS MEZA
DIRECTOR: ING. GERMÁN CASTRO MACANCELA
Quito, Abril del 2004

DECLARACIÓN
Nosotros, Luis Leonardo Páliz Pulíes y Patricio Gonzalo Bayas Meza, declaramos
bajo juramento que el trabajo aquí descrito es de nuestra autoría, que no ha sido
previamente presentada para ningún grado o calificación profesional; y, que
hemos consultado las referencias bibliográficas que se incluyen en este
documento:
A través de la presente declaración cedemos nuestros derechos de propiedad
intelectual correspondientes a este trabajo, a la Escuela Politécnica Nacional,
según lo establecido por la ley de Propiedad Intelectual, por su Reglamento y por
la normatividad institucional vigente.
(/ ' ^Patricio Bayas Meza Luis Leonardo Páliz Pulíes

CERTIFICACIÓN
Certrfíco que el presente trabajo fue desarrollado por Luis Leonardo Pálíz Pulles y
Patricio Gonzalo Bayas Meza, bajo mi supervisión.
Ing.: Germán CastroMacanéela
DIRECTOR DEL PROYECTO

AGRADECIMIENTOS
Agradecemos, a la ESCUELA POLITÉCNICA NACIONAL, noble Institución que
nos ha permitido finalizar con éxito esta carrera, por todo cuanto nos ha brindado.
Agradecemos de manera especial a nuestro Director de Proyecto: Ing. Germán
Castro Macanceía, por ayudamos desde el principio, en la realización de este
trabajo, por su tiempo, su dedicación y por sus valiosos consejos que, sin ellos
este trabajo no hubiera sido posible.
De igual manera a nuestros padres por esforzarse cada día, para que seamos
mejores seres humanos.
A nuestros hermanos y hermanas por su constante apoyo.
A mi esposa, Jenny, por su amor, dedicación y cariño.
A Vicente, Arturo por sus valiosos consejos, a nuestros amigos, por el tiempo
brindado.
DEDICATORIA:
Dedicamos este trabajo a nuestro Dios, por estar desde el inicio de nuestras vidas
ayudándonos a ser cada día mejores.
A nuestros Padres porque gracias a ellos podemos escribir estos párrafos, por su
amor, cariño, dedicación, por habernos permitido, mediante su esfuerzo diario,
alcanzar este, tan anhelado sueño.
A nuestros hermanos y hermanas, por ser quienes han estado junto a nosotros
en los momentos más difíciles de nuestras vidas.
A mi esposa, Jenny, por ser el regalo más preciado en mi vida, por su apoyo, su
amor, su ternura, su confianza y su dedicación.
A nuestros amigos por haber compartido con nosotros momentos de alegría, de
tristeza y de prueba en nuestro camino estudiantil.

PRESENTACIÓN
Dada la necesidad de tener una máquina con características automáticas de
dosificación se presenta este prototipo como una alternativa para suplir ésta
necesidad.
El prototipo permitirá efectuar el control mediante un microcontrolador (PIC) para
la dosificación de la cantidad de pintura de caucho requerida para obtener el color
deseado empleando los tres colores primarios (amarillo, azul y rojo), teniendo una
base blanca predeterminada.
Para garantizar el correcto funcionamiento del dosificador está construido con una
estructura firme y robusta para de esta manera tener una adecuada manipulación,
transportación y el uso de la misma por persona! no capacitado.
El programa del prototipo esta escrito en subrutinas para que pueda ser utilizado
éh la elaboración de otros programas para que PICs de la familia 16 F87xx
puedan manejar elementos como LCD, motor a pasos, etc.

CAPITULO 1
1.1 INTRODUCCIÓN
1.2 MEDIDORES DE PRESIÓN DIFERENCIAL
1.2.1 TUBOVENTURI1.2.2 TOBERA
1.3 MEDIDORES DE DESPLAZAMIENTO POSITIVO
1.3.1 MEDIDORES DE DESPLAZAMIENTO POSITIVO PARALÍQUIDOS1.3.1.1 MEDIDORES DE PISTÓN OSCILANTE1.3.1.2 MEDIDORES DE PALETAS DESLIZANTES1.3.2.3 MEDIDORES DE ENGRANAJES
1.3.2.3.1 Medidores de rueda oval1.3.2.3.2 Medidores helicoidales
1.4 CARACTERÍSTICAS DE COMPORTAMIENTO DE LOSMEDIDORES DE DESPLAZAMIENTO POSITIVO
1.5 INTRODUCCIÓN A LA DOSIFICACIÓN
1.5.1 ¿QUÉ ES DOSIFICACIÓN?1.5.2; DOSIFICACIÓN DE LÍQUIDOS
1.5.2.1 DOSIFICACIÓN DE LÍQUIDOS POR VOLUMEN1.5.2.2 DOSIFICACIÓN DE LÍQUIDOS POR BOMBA DE ENGANAJES1.5.2.3 DOSIFICACIÓN DE LÍQUIDOS CON BOMBA PERISTÁLTICA
1.53 DOSIFICACIÓN DE SOLIDOS1.5.2.1 POR VIBRACIÓN1.5.2.3 POR TORNILLO
1.6 DISPOSITIVOS PARA FERTLRRIGACION
1.6.1 TANQUE FERTILIZANTE1,6,.2 DOjSpICADORTIPq1.6.3 BOMBAS DE "

2.2.4 TABLERO DE MANDO.
2.2.4.1 Switch ON/OFF.
2.2.4.2 Teclado.
2.2.4% Display.
2.2.4.4 Fusible.V
2.3 FUNCIONAMIENTO DE LA MAQUINA DOSIFICADORA DE
PINTURA.
2.4 INTRODUCCIÓN A LOS MOTORES PASO A PASO.
2.4.1 ¿QUÉ ES UN MOTOR PASO A PASO?
2.4.2 MOTORES PASO A PASO CON ROTOR DE IMÁN PERMANENTE.
2.4.3 MOTORES PASO A PASO BIPOLARES.
2.4.4 MOTORES PASO A PASO UNIPOLARES.
CAPÍTULO 3
3.1 INTRODUCCIÓN.
3.2 HARDWARE.
3.2.1 MICROCONTROLADOR PIC 16F873.
3.2.1.1 Fuente.
3.2.1.2 Oscilador.
3.2.1.3 ResetdelPIC.
3.2.2 CIRCUITOS DE CONTROL.
3.2.2.1 Circuito para el teclado.
3.2.2.2 Circuitos para los finales de carrera.
3.2.2.3 Circuito de control del LCD.

3.2.3 CIRCUITOS DE POTENCIA.
3.2.3.1 Circuito de control de motores.
3.2.3.2 Circuito de control de activado de la fuente de los motores.
3.233 Circuito de control de activado de los motores de succión,
rotación y batido.
3.2.4. ESQUEMÁTICO DE LOS CIRCUITOS QUE CONFORMAN EL
HARDWARE DE LA MÁQUINA DOSIFICADORA.
3.3 SOFTWARE.
3.3.1 PROGRAMA DE CONTROL DEL DISPLAY DE CRISTAL LÍQUIDO
LCD.
3.3.1.1 Iniciación del LCD.
33.1.2 Presentación de textos.
33.2 PROGRAMA DE CONTROL DE LOS MOTORES DE SUCCIÓN,
ROTACIÓN Y BATIDO.
3.3,2.1 Motor de succión.
33.2.2 Motor de rotación.
33.23 Motor de batido.
333 PROGRAMA DE CONTROL DEL TECLADO.

CAPITULO 4
4.1 INTRODUCCIÓN.
4.2 PRUEBAS Y RESULTADOS
4.2.1 PRUEBAS CON AGUA.
4.2.2 PRUEBAS CON ANILINAS.
4.2.3 PRUEBAS CON PINTURA.
4.3 ANÁLISIS DE LOS RESULTADOS
4.3.1 ERRORES PRESENTADOS EN PRUEBAS CON AGUA.
4.3.2 ERRORES PRESENTADOS EN PRUEBAS CON ANILINAS.
4.3.3 ERRORES PRESENTADOS EN PRUEBAS CON PINTURA.
4.4 ANÁLISIS TÉCNICO
4.5 CONCLUSIONES Y RECOMENDACIONES.
CAPITULO 5
MANUALES PARA EL USUARIO DE LA MÁQUINA DOSIFICADORA
DE PINTURA.
5.1 MANUAL DE INSTRUCCIONES DE MANEJO PARA LA MAQUINA
DE DOSIFICACIÓN
CÓDIGO DEL PROGRAMA.
DETALLE DEL PROGRAMA DEL PROROTIPO
BIBLIOGRAFÍA.
ANEXOS.
GLOSARIO

CAPITULO 1
DOSIFICADORES
i
1.1 INTRODUCCIÓN
Un dosificador puede ser considerado como un medidor de volumen, manejado para
esíabíecer una cantidad determinada del material que va ha ser cuantifícado, medido
o proporcionado hacia un mezclador, este mecanismo se lo reconoce como
dosificación. Se presenta algunos ejemplos de aplicación de medidores aplicados a
la dosificación.
Se cita un marco teórico de los medidores empleados como ejemplos de
dosificadores, Se indican también las ventajas e inconvenientes de emplear uno u
otro tipo de dosificador, tanto técnica como económicamente.
Aunque se hace referencia a diferentes tipos de medidores, es obvio que no todos
están contemplados en este estudioj dada la amplia variedad que, en el mercado
industrial son utilizados.
1.2 MEDIDORES DE PRESIÓN DIFERENCIAL
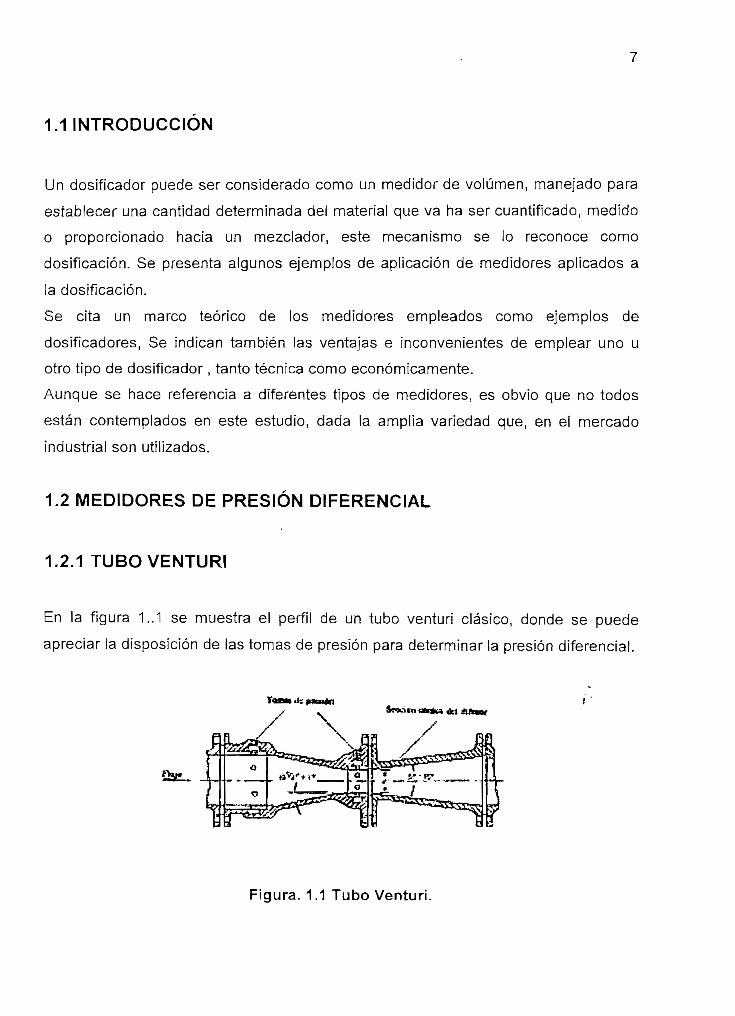
1.2.1 TUBOVENTURI
En la figura 1..1 se muestra el perfil de un tubo venturi clásico, donde se puede
apreciar la disposición de las tomas de presión para determinar la presión diferencial.
Figura. 1.1 Tubo Venturi.

Como se aprecia en la figura 1.1 se pueden destacar tres partes fundamentales: a)
una sección de entrada cónica convergente en la que la sección transversal
disminuye, lo que se traduce en un aumento de la velocidad del fluido y una
disminución de la presión; b) una sección cilindrica en la que se sitúa la toma de baja
presión, y donde la velocidad del fluido se mantiene prácticamente constante, y c)
una tercera sección de salida cónica divergente en la que la sección transversal
aumenta, disminuyendo la velocidad y aumentando la presión. La incorporación de
esta sección de salida permite una recuperación de la mayor parte de la presión
diferencial producida y, portante, un ahorro de energía figura 1.2
O) *J i* t»t
del ociftoo o cuúil-ft (* en* isptfteao i
Figura. 1.3 Comparación entre diferentes dispositivos
de presión diferencial con respecto a la
recuperación de la presión.
En la figura 1.2 se muestra una comparación entre varios elementos de presión
diferencial con respecto a la recuperación de la presión.
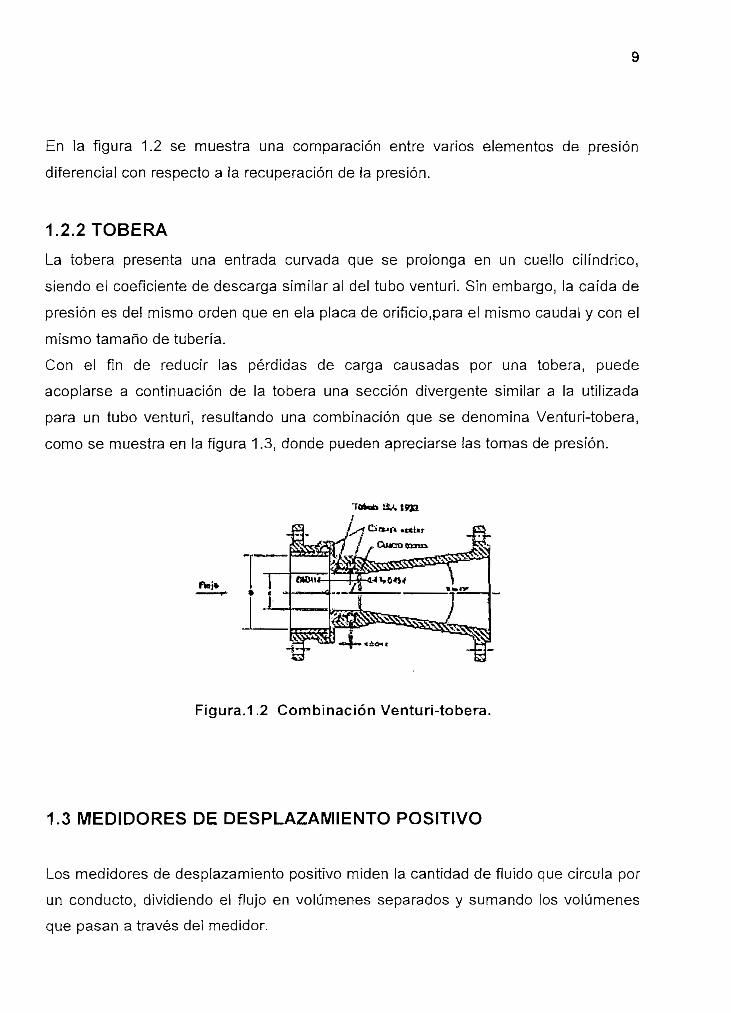
1.2.2 TOBERA
La tobera presenta una entrada curvada que se prolonga en un cuello cilindrico,
siendo el coeficiente de descarga similar al del tubo venturi. Sin embargo, la caída de
presión es de! mismo orden que en ela placa de orificio,para el mismo caudal y con el
mismo tamaño de tubería.
Con el fin de reducir las pérdidas de carga causadas por una tobera, puede
acoplarse a continuación de la tobera una sección divergente similar a la utilizada
para un tubo venturi, resultando una combinación que se denomina Veníuri-tobera,
como se muestra en la figura 1.3, donde pueden apreciarse las tomas de presión.
ftaj»
Figura.1.2 Combinación Venturi-tobera.
1.3 MEDIDORES DE DESPLAZAMIENTO POSITIVO
Los medidores de desplazamiento positivo miden la cantidad de fluido que circula por
un conducto, dividiendo el flujo en volúmenes separados y sumando ios volúmenes
que pasan a través del medidor.
10
En cada medidor, se pueden destacar tres componentes comunes:
• Cámara, que se encuentra llena de fluido.
• Desplazador, que, bajo la acción del fluido circulando, transfiere el fluido
desde el final de una cámara a la siguiente.
" Mecanismo (indicador o registrador), conectado al desplazador, que cuenta el
número de veces que el desplazador se mueve de una parte a otra en la
cámara de trabajo.
Un problema importante que se debe tener en cuenta al fabricar un medidor de
desplazamiento positivo es conseguir una buena estanqueidad de las partes móviles,
evitando un par de rozamiento inaceptable y que la cantidad de líquido de escape a
través del medidor sea moderada. Por esta razón, es necesario calibrar el medidor
de. desplazamiento a varios caudales, dentro del margen de utilización, con un fluido
de viscosidad conocida.
1,3.1 MEDIDORES DE DESPLAZAMIENTO POSITIVO PARA
LÍQUIDOS
En principio, los medidores de desplazamiento positivo para gases deberían ser
similares a. los utilizados para líquidos, sin embargo, en la práctica hay una diferencia
importante. La energía de un fluido en movimiento es proporcional a su densidad, lo
que significa que un gas no puede suministrar con facilidad la energía suficiente para
hacer funcionar un medidor con una mecánica compleja. Por consiguiente, los
medidores de desplazamiento positivo para gases tienen que tener una baja
resistencia a la fricción.
No obstante, en este estudio sólo se tratará de los medidores de desplazamiento
positivo para líquidos.

11
Dentro de los diferentes tipos de medidores para líquidos se considerarán los
siguientes:
• medidores de tipo pistón,
• medidores de paletas deslizantes
• Medidores de engranajes.
Los medidores de tipo pistón se utilizan, habitualmente, para medidas precisas de
pequeños caudales, siendo una de sus aplicaciones en unidades de bombeo de
distribución de petróleo. Los medidores de paletas deslizantes se usan para medir
líquidos de elevado coste, siendo instalados, generalmente, en camiones cisternas
para la distribución de combustible para la calefacción. Los medidores de engranajes
encuentran aplicaciones para un amplio margen de líquidos y condiciones de
funcionamiento, aunque la precisión de la medida no es tan elevada.
1.3.1.1 MEDIDOR DE PISTÓN OSCILANTE
En la figura 1.4 se aprecia una sección transversal de un medidor de pistón oscilante
mostrando las cuatro etapas de su ciclo de funcionamiento.
Stíid* 5
IVfctóat
Figura. 1,4 Etapas de funcionamiento de un medidor de pistón oscilante.
Consiste de un pistón hueco montado excéntricamente dentro de un cilindro. El
cilindro y el pistón tienen la misma longitud, pero el pistón, como se aprecia en la
figura, tiene un diámetro más pequeño que el cilindro. El pistón, cuando está en
funcionamiento, oscila alrededor de un puente divisor, que separa la entrada de la
salida de líquido, Al comienzo de un ciclo el líquido entra al medidor a través de la

12
puerta de entrada A, en la posición 1, forzando a! pistón a moverse alrededor del
cilindro en la dirección mostrada en la figura, hasta que el líquido delante del pistón
es forzado a salir a través de la puerta de salida B, en la posición 4, quedando el
dispositivo listo para comenzar otro ciclo.
1.3.1.2 MEDIDORES DE PALETAS DESLIZANTES
En la figura 1.5 se muestra un medidor de paletas deslizantes, que consta de un rotor
con unas paletas, dispuestas en parejas opuestas, que se pueden deslizar
libremente hacia adentro y hacia afuera de su alojamiento. Los miembros de las
paletas opuestas se conectan rígidamente mediante varillas, y el fluido circulando
actúa sobre las paletas sucesivamente, provocando el giro del rotor.
Mediante esta rotación el líquido se transfiere desde la entrada a la salida a través
del espacio entre las paletas. Como éste es el único camino para el paso del líquido
desde la entrada a la salida, contando el número de revoluciones del rotor, puede
determinarse la cantidad de líquido que ha pasado. El cierre se lleva a cabo por la
acción de las paletas sobre la pared de la cámara, mediante una combinación de
presión de líquido y fuerzas centrífugas, auxiliado por el apriete, mediante resortes,
de las paletas contra la pared de la cámara. Esto ayuda a mantener en valores
aceptables cualquier escape de líquido que pueda producirse a través de las paletas.
Figura. 1.5 Medidor de paletas deslizantes.
13
1.3.1.3 MEDIDORES DE ENGRANAJES
Entre los más importantes medidores de engranajes se pueden destacar lossiguientes:
» medidores de rueda oval
• Medidores helicoidales.
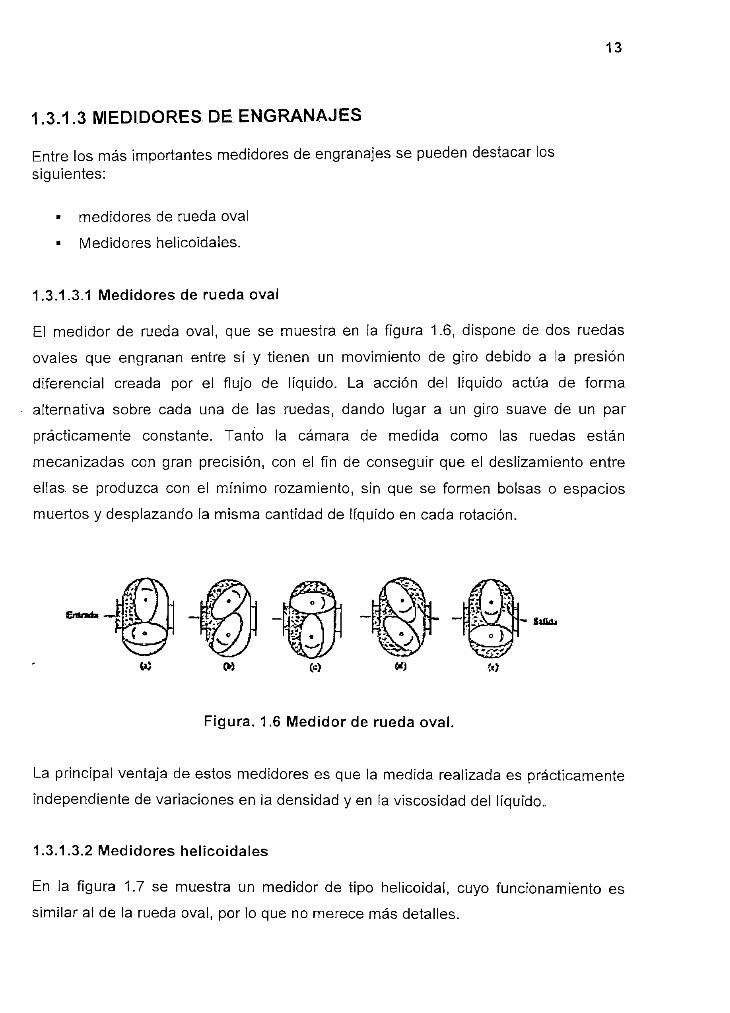
1.3.1.3.1 Medidores de rueda oval
El medidor de rueda oval, que se muestra en la figura 1.6, dispone de dos ruedas
ovales que engranan entre sí y tienen un movimiento de giro debido a la presión
diferencial creada por ei flujo de líquido. La acción del líquido actúa de forma
alternativa sobre cada una de las ruedas, dando lugar a un giro suave de un par
prácticamente constante. Tanto la cámara de medida como las ruedas están
mecanizadas con gran precisión, con e! fin de conseguir que el deslizamiento entre
ellas se produzca con ei mínimo rozamiento, sin que se formen bolsas o espacios
muertos y desplazando la misma cantidad de líquido en cada rotación.,
Figura. 1.6 Medidor de rueda oval.
La principal ventaja de estos medidores es que la medida realizada es prácticamente
independiente de variaciones en la densidad y en la viscosidad del líquido..
1.3.1.3.2 Medidores helicoidales
En la figura 1.7 se muestra un medidor de tipo helicoidal, cuyo funcionamiento es
similar al de la rueda oval, por lo que no merece más detalles.

14
Fig. 1.7 Medidor de engranajes helicoidales.
1.4 CARACTERÍSTICAS DE COMPORTAMIENTO DE LOS
MEDIDORES DE DESPLAZAMIENTO POSITIVO
Como todos los dispositivos mecánicos complicados, los medidores de
desplazamiento presentan resistencia a la fricción, la cual tiene que ser vencida por
el fluido circulando. Para caudales muy bajos, el fluido no tiene energía cinética
suficiente para hacer girar el rotor frente a esta fricción, que además incluye, en la
mayoría de los medidores de desplazamiento, la resistencia ofrecida por el
mecanismo articulado del contador, por lo que el fluido se desliza lentamente entre
los componentes del medidor y la cámara, sin producir movimiento del rotor o pistón.
El error del medidor, E, se define como:
E = Qlndicado - Qreal 100%
Qreal
de forma que, para estos caudales bajos, el error es grande y negativo, Sin embargo,
cuando el caudal aumenta este error negativo desaparece rápidamente, ya que ia
energía cinética del fluido aumenta con el cuadrado de su velocidad. Una condición
cercana al equilibrio se alcanza cuando la fuerza directriz del fluido se equilibra por
las diversas fuerzas de resistencia, y esto se mantiene para el margen de
funcionamiento para un medidor bien diseñado.
15
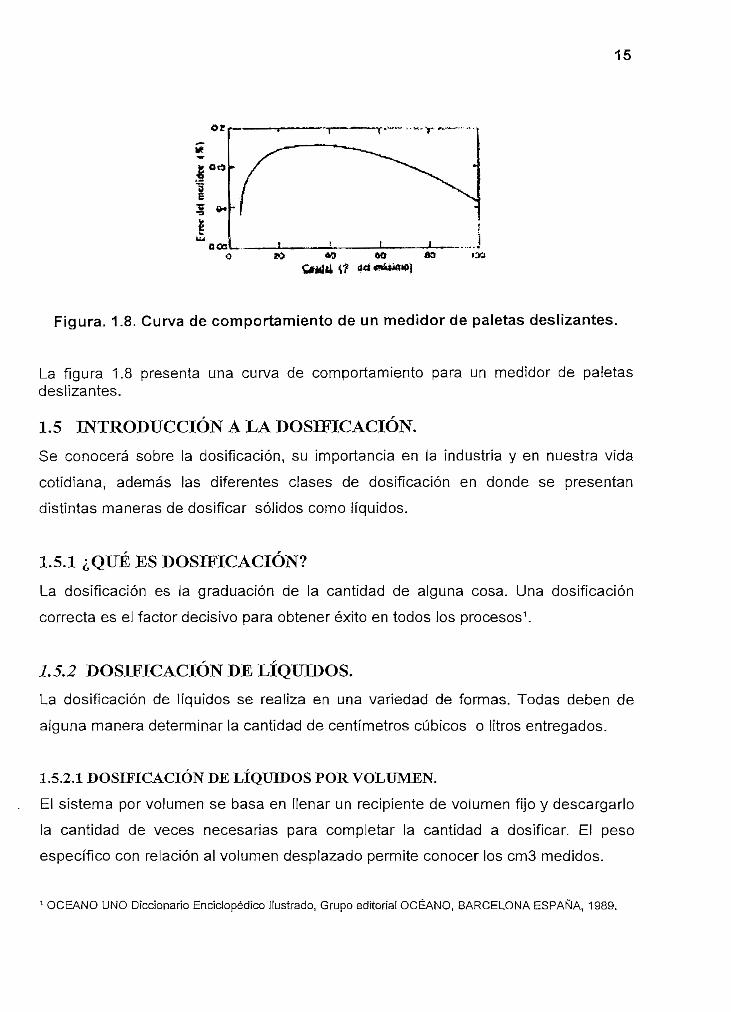
Figura. 1.8. Curva de comportamiento de un medidor de paletas deslizantes,
La figura 1.8 presenta una curva de comportamiento para un medidor de paletasdes tizantes.
1.5 INTRODUCCIÓN A LA DOSIFICACIÓN.
Se conocerá sobre la dosificación, su importancia en la industria y en nuestra vida
cotidiana, además las diferentes clases de dosificación en donde se presentan
distintas maneras de dosificar sólidos como líquidos.
1.5.1 ¿QUE ES DOSIFICACIÓN?
La dosificación es la graduación de la cantidad de alguna cosa. Una dosificación
correcta es el factor decisivo para obtener éxito en todos los procesos1.
1.5.2 DOSIFICACIÓN DE LÍQUIDOS.
La dosificación de líquidos se realiza en una variedad de formas. Todas deben de
alguna manera determinar la cantidad de centímetros cúbicos o litros entregados.
1.5.2.1 DOSIFICACIÓN DE LÍQUIDOS POR VOLUMEN.
El sistema por volumen se basa en llenar un recipiente de volumen fijo y descargarlo
la cantidad de veces necesarias para completar la cantidad a dosificar. El peso
específico con relación al volumen desplazado permite conocer los cm3 medidos.
1 OCÉANO UNO Diccionario Enciclopédico Ilustrado, Grupo editorial OCÉANO, BARCELONA ESPAÑA, 1989.

16
Un simple pistón con dos válvulas sirve como método como vemos en la figura 1.9
i Entrada
PISTÓN
\aGil
S
Figura 1.9. Dosificador de líquidos por pistón.
En este caso un cilindro neumático empuja el pistón dentro del pistón dosificador. La
electro válvula EV inicia y detiene el avance del cilindro de empuje, las válvulas del
dosificador constan de una bolilla empujada por un resorte.
Cuando hay presión del liquido dentro del pistón dosificador la misma se abre y deja
pasar una cantidad de liquido dosificado.
Avanzando o retrocediendo el cilindro neumático en relación con el pistón dosificador
se cambia la cantidad de liquido controlado.
1.5.2.2 DOSIFICACIÓN DE LÍQUIDOS CON BOMBA DE ENGRANAJES
Una bomba de engranajes con un buen ajuste es otro método de dosificación de
líquidos mostrado en la figura 1.10.
18
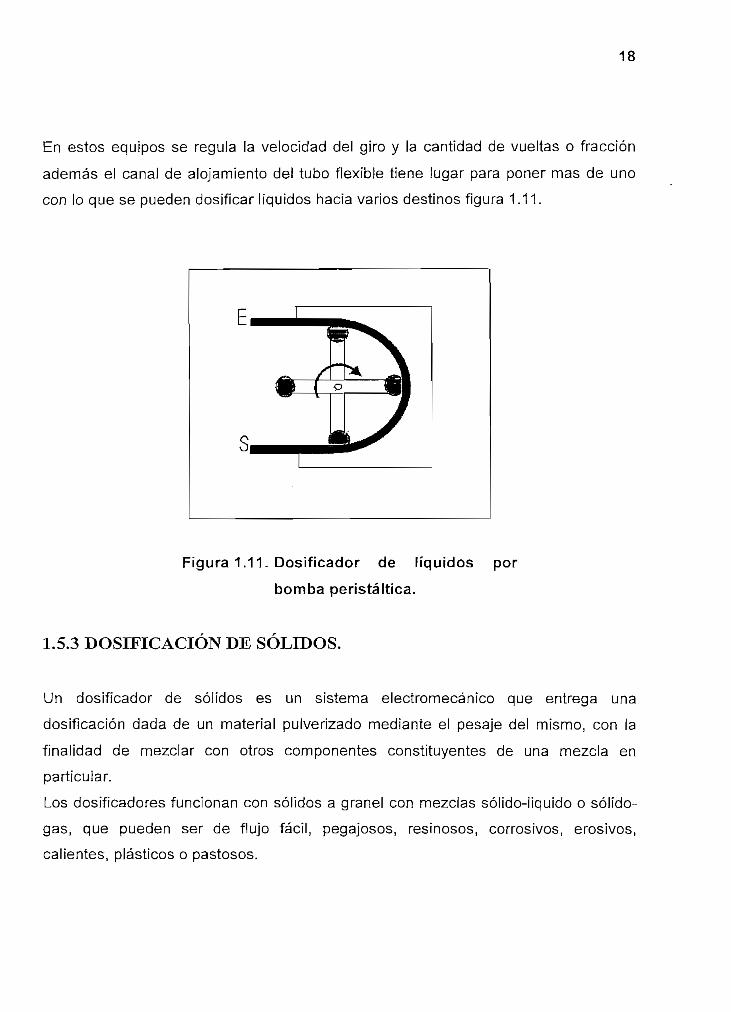
En estos equipos se regula la velocidad del giro y la cantidad de vueltas o fracción
además el canal de alojamiento del tubo flexible tiene lugar para poner mas de uno
con lo que se pueden dosificar líquidos hacia varios destinos figura 1.11.
s,
Figura 1.11, Dosificador de líquidos por
bomba peristáltica.
1.5.3 DOSIFICACIÓN DE SOLIDOS.
Un dosificador de sólidos es un sistema electromecánico que entrega una
dosificación dada de un material pulverizado mediante el pesaje del mismo, con la
finalidad de mezclar con otros componentes constituyentes de una mezcla en
particular.
Los dosíficadores funcionan con sólidos a granel con mezclas sólido-líquido o solido-
gas, que pueden ser de fiujo fácil, pegajosos, resinosos, corrosivos, erosivos,
calientes, plásticos o pastosos.
19
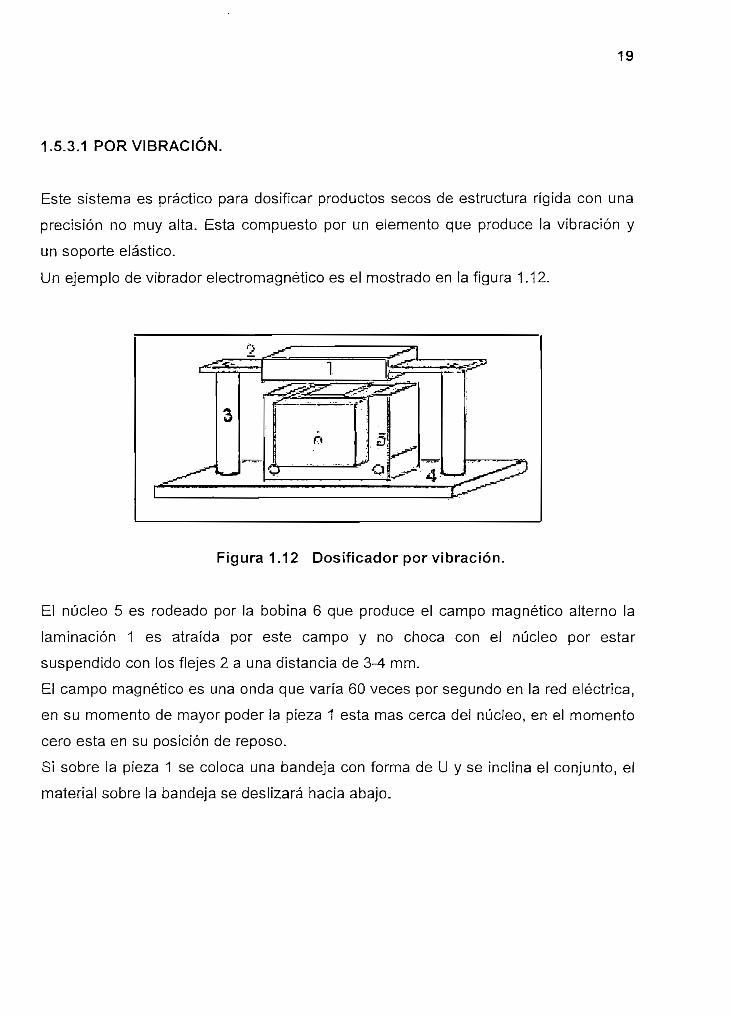
1.5.3.1 POR VIBRACIÓN.
Este sistema es práctico para dosificar productos secos de estructura rígida con una
precisión no muy alta. Esta compuesto por un elemento que produce la vibración y
un soporte elástico.
Un ejemplo de vibrador electromagnético es el mostrado en la figura 1.12.
Figura 1.12 Dosificador por vibración.
El núcleo 5 es rodeado por la bobina 6 que produce el campo magnético alterno la
laminación 1 es atraída por este campo y no choca con el núcleo por estar
suspendido con los flejes 2 a una distancia de 3-4 mm.
El campo magnético es una onda que varía 60 veces por segundo en la red eléctrica,
en su momento de mayor poder la pieza 1 esta mas cerca del núcleo, en el momento
cero esta en su posición de reposo.
Si sobre la pieza 1 se coloca una bandeja con forma de U y se inclina el conjunto, el
material sobre la bandeja se deslizará hacia abajo.

20
Figura 1.13. Funcionamiento del dosificador por vibración
cuando cae el material.
En la figura 1.13. el material cae sobre la bandeja y se desliza hacia abajo por la
vibración. Regulando la intensidad de la vibración se regula la cantidad de material
dosificado.
Figura 1.13 Funcionamiento del dosificador por
vibración al moverse la bandeja.
En este modelo la bandeja vibratoria esta horizontal, el vibrador en su extremo y los
soportes tienen una zona flexible (amarillo) de poliuretano. La vibración se da a la
bandeja y el materia! es desplazado hacia delante.

21
1.5.3.2 POR TORNILLO.
El elemento de dosificación en este tipo es una rosca de paso 1-1 que al girar
desenroscando traslada el material desde la tolva a la salida
Figura 1.14. Dosificador por tornillo.
En 1 tenemos la tolva con material, 2 es el motor de velocidad variable y 3 el tornillo
dentro de su camisa (figura 1.14).
1.6 DOSIFICACIÓN PARA LOS SISTEMAS DE FERTIRRIGACION
La necesidad de racionalizar ios recursos hídricos, ha llevado a introducir nuevas
tecnologías de riego que permitan un mayor control sobre el agua aplicada, y por
tanto la posibilidad de obtener mayores eficiencias reduciendo las dotaciones totales
empleadas.
Los dispositivos de dosificación se dividen en tres grupos:
1.6.1 Tanque fertilizante
1.6.2 Dosificador tipo venturi
1.6.3 Bombas dosificadoras de accionamiento hidráulico o eléctrico
22
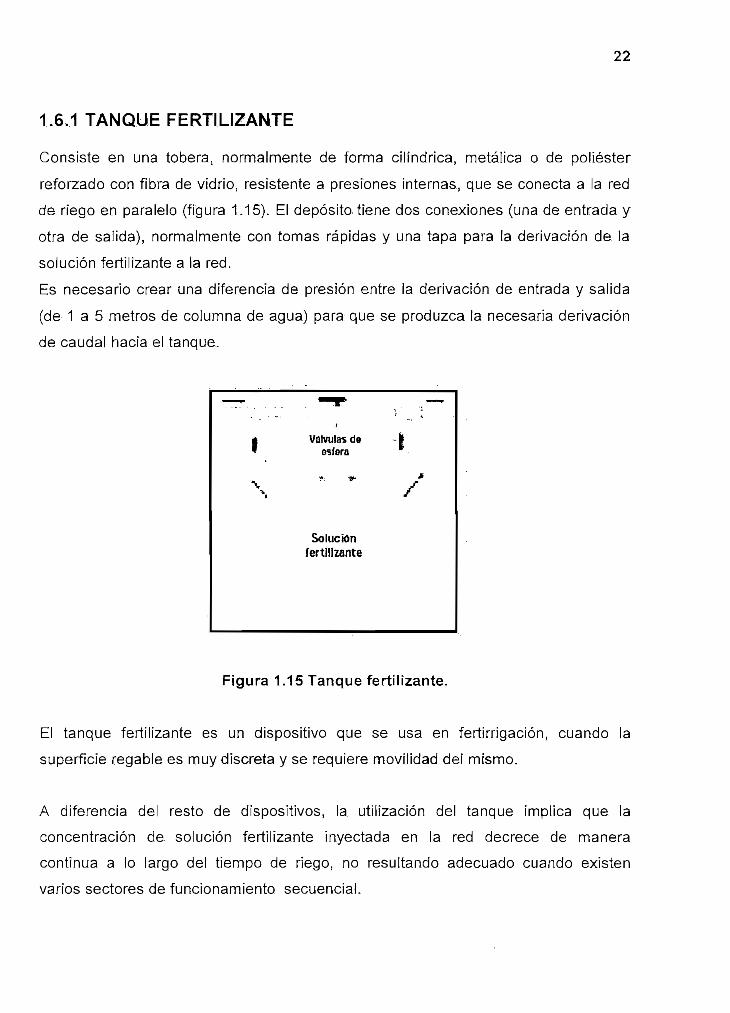
1.6.1 TANQUE FERTILIZANTE
Consiste en una tobera, normalmente de forma cilindrica, metálica o de poliéster
reforzado con fibra de vidrio, resistente a presiones internas, que se conecta a la red
de riego en paralelo (figura 1.15). El depósito, tiene dos conexiones (una de entrada y
otra de salida), normalmente con tomas rápidas y una tapa para la derivación de ia
solución fertilizante a la red.
Es necesario crear una diferencia de presión entre la derivación de entrada y salida
(de 1 a 5 metros de columna de agua) para que se produzca la necesaria derivación
de caudal hacia el tanque.
Válvulas doesfera
Soluciónfertilizante
Figura 1.15 Tanque fertilizante.
El tanque fertilizante es un dispositivo que se usa en fertirrigacíón, cuando la
superficie regable es muy discreta y se requiere movilidad del mismo.
A diferencia del resto de dispositivos, la utilización del tanque implica que la
concentración de solución fertilizante inyectada en la red decrece de manera
continua a lo largo del tiempo de riego, no resultando adecuado cuando existen
varios sectores de funcionamiento secuencia!.

23
En la actualidad prácticamente está en desuso. No obstante, no debe descartarse su
aplicación a alguna situación especial.
1.6.2 DOSIFICADOR TIPO VENTURI
El dosificador tipo venturi se basa en el principio de funcionamiento del aforador del
mismo nombre. Al producirse una reducción gradual, pero importante, del diámetro
desde la tobera de entrada hasta la garganta, se produce a su vez una disminución
brusca de la presión relativa en la última. Si ei caudal que circula por el venturi es tal
que la presión relativa en la garganta es negativa, y en la. misma se conecta una
conducción a un depósito abierto con la solución fertilizante, se producirá una
succión.
Figura 1.16 Dosificador tipo venturi.
En la figura 1.16 se puede apreciar la conexión típica de un dosificador venturi (5) en
by-pass con la conducción principal (1) que a través de un conducto conectado a su
garganta, en cuyo extremo aguas arriba existe un pequeño filtro (6), succiona la
solución fertilizante desde un depósito (7). La válvula de regulación (2) tiene como
función crear una pérdida de carga tal, que el caudal circulante por el by-pass genere
en la garganta una presión negativa suficiente para succionar un determinado caudal
24
de solución fertilizante. Las válvulas de cierre (3) y (4) únicamente tienen objeto de
aislamiento.
El caudal dosificado por el venturi depende de los siguientes factores:
• Presión aguas arriba del venturi
• Caudal derivado por el mismo
• Dimensiones de este
De experiencias realizadas en laboratorio con venturis de diferente diámetro nominal
y fabricante se pueden exponerlas siguientes consideraciones:
• Para que empiece a funcionar correctamente es necesario crear una pérdida
de presión mínima de 10. Superior en algunos casos al 50% de la disponible.
• A mayor presión a la entrada y a igualdad de pérdida de presión en el venturi
el caudal dosificado es menor.
» El caudal dosificado es bastante sensible a la variación de nivel en el depósito
fertilizante.
• La información suministrada junto al dispositivo, en la mayoría de los casos,
es escasa, inexistente, y poco fiable.
Si bien» el venturi como dosificador de productos químicos, presenta una serie de
[imitaciones tal y como se han mencionado, su uso está muy extendido debido a las
siguientes ventajas:
• Es un sistema barato,
» Adecuado para superficies discretas.
• Sistema robusto y sin partes mecánicas móviles._
• No requiere ningún tipo de energía exterior para su funcionamiento.
Los dosificadores venturis se fabrican con diámetros de 3/4", 1", 1" y 1/2 y 1" y 3/4.
En ocasiones se suministran con rotámetro y válvula de estrangulamiento para la
regulación del caudal dosificado.

25
Existen modelos simples y dobles formados por dos inyectores dispuestos en
paralelo. Los caudales inyectados varían entre 15 y 300 l/h, aproximadamente.
1.6.3 BOMBAS BE DOSIFICACIÓN
Es el sistema más preciso de los hasta hora expuestos. Las bombas se pueden
clasificar en función del tipo de energía que aportan.
Las que tienen mayor interés son las de tipo volumétrico y las rotodinámicas o
cinéticas.
Como dosificadoras de productos químicos, las más generalizadas, son las de tipo.
volumétrico (aportan energía fundamentalmente en forma de presión. De estas las
más comunes son las de desplazamiento positivo, ya sean de pistón o diafragma.
El principio de funcionamiento se representa en la figura 1.17 En síntesis, dispone de
un cilindro en cuyo interior se desplaza un pistón con movimiento alternativo. La
cámara o cilindro dispone de una entrada y una salida, ambas con sendas válvulas
antíretorno.
Salida Salida
Entrada '' EntradaAspiración
Figura 1.17 Bombas dosificadoras.
El caudal se puede variar, bien variando el recorrido del elemento impulsor-volumen
efectivo del cilindro-, o bien variando la velocidad del ciclo de ida, y vuelta -velocidad
del elemento impulsor-. En algunas ocasiones como se expondrá posteriormente se
utilizan para la inyección de productos químicos a la red bombas centrífugas, ya sean
de arrastre magnético para potencias pequeñas, o de cuerpo y rodetes de acero
inoxidables en sistemas de inyección con control automático.

26
El accionamiento de las bombas puede ser mediante motor eléctrico, normalmente
alimentado por comente alterna, o mediante accionamiento hidráulico, aprovechando
la propia energía de la red de riego.
Las bombas dosificadoras de accionamiento eléctrico suelen ser volumétricas, de
desplazamiento positivo de pistón o diafragma.
Dado que los motores eléctricos de accionamiento son, en la mayoría de los casos,
alimentados por corriente alterna, el procedimiento más sencillo para regular el
caudal inyectado es variar el recorrido del elemento impulsor o volumen de la
cámara. Para ello la mayoría disponen de un dispositivo de regulación del mismo, ya
sea manual -tornillo micrométrico— o automático.

27
CAPITULO 2
PARTES DE LA MAQUINA DOSIFICADORA
DE PINTURA

28
2.1 INTRODUCCIÓN.
Este capítulo identifica la constitución de la máquina dosificadora de pintura, en cada
parte se presenta una explicación de su funcionamiento, así como también la
ubicación y tipo de material con el que esta construida.
Las dimensiones del prototipo se encuentran en el anexo 6 "DIMENSIONES DEL
PROTOTIPO".
2.2 PARTES DE LA MÁQUINA DOSIFICADORA DE PINTURA.
La maquina dosificadora de pintura consta de los siguientes componentes:
- Base de soporte.
- Mesa de rotación.
- Soporte principal.
- Tablero de mando.
2.2.1 BASE DE SOPORTE.
La base de soporte mostrada.en la figura 2.1. apoya a la mesa de rotación y a sus
partes constitutivas, las cuales se detallarán posteriormente. Esta base está
construida de perfiles de aluminio, material que fue escogido por su facilidad de
manipulación, maníobrabilidad, rigidez, facilidad de encontrarlo en el mercado, por
ser relativamente liviano y de bajo costo.
Esta base consta de tres pilares externos y tres internos, los externos tienen la
finalidad de apoyar adecuadamente a la mesa de rotación y así tener un correcto
movimiento de la misma.
Los tres pilares internos permiten sujetar a la caja de aumento de torque para el
motor M2, el eje de la caja de aumento de torque se sujeta al eje de la mesa de
rotación para que esta gire. Estos tres pilares se unen por medio de una mesa de
forma hexagonal, y esta a su vez a los tres pilares externos.

29
Sobre los pilares internos se encuentra un triángulo de aluminio en el que se coloca
una chumacera que soporta a la mesa de rotación, esta chumacera evita que la
mesa se pandee como consecuencia del peso de la pintura colocada en los tres
cilindros.
Pilar interno
Pilar externo
mesa hexagonal
triángulo
Figura 2.1. Base de soporte.
a: Vista lateral
b:V¡sta frontal
c: Vista superior

30
2.2.2 MESA 33E ROTACIÓN.
En la mesa circular están apoyadas la mayoría de las partes de la máquina
dosificadora de pintura, la mesa es de acrílico, (se la hizo en este material para evitar
que sea muy pesada), con la desventaja de ser un material que con un peso
considerable se pandea, por lo que se optó agregarle acrílico en la parte inferior , en
dirección de cada cilindro, para darle mayor fortaleza, figura 2.2.
La mesa de rotación gira por medio de un motor paso a paso, hasta ubicar a cada
uno de los cilindros de succión-expulsión en la posición adecuada para la
dosificación.
. J
b
c
Figura 2.2. Mesa de rotación.
a; Vista lateral
b: Vista superior
c: Vista frontal
31
Las partes constitutivas de la mesa de rotación son:
1 Soporte 1 de! motor M1.
M1 Motor M1 de pasos.
3 Caja de aumento de torque para el motor M1.
4 Cilindros contenedores de los colores primarios.
5 Cilindros de succión-expuísión.
6 Válvulas check.
7 Mangueras.
8 Acoples "T" para las mangueras.
. 9 Mesa de batido.
10 Soporte de la mesa de batido.
32
0im.
00
' , , <
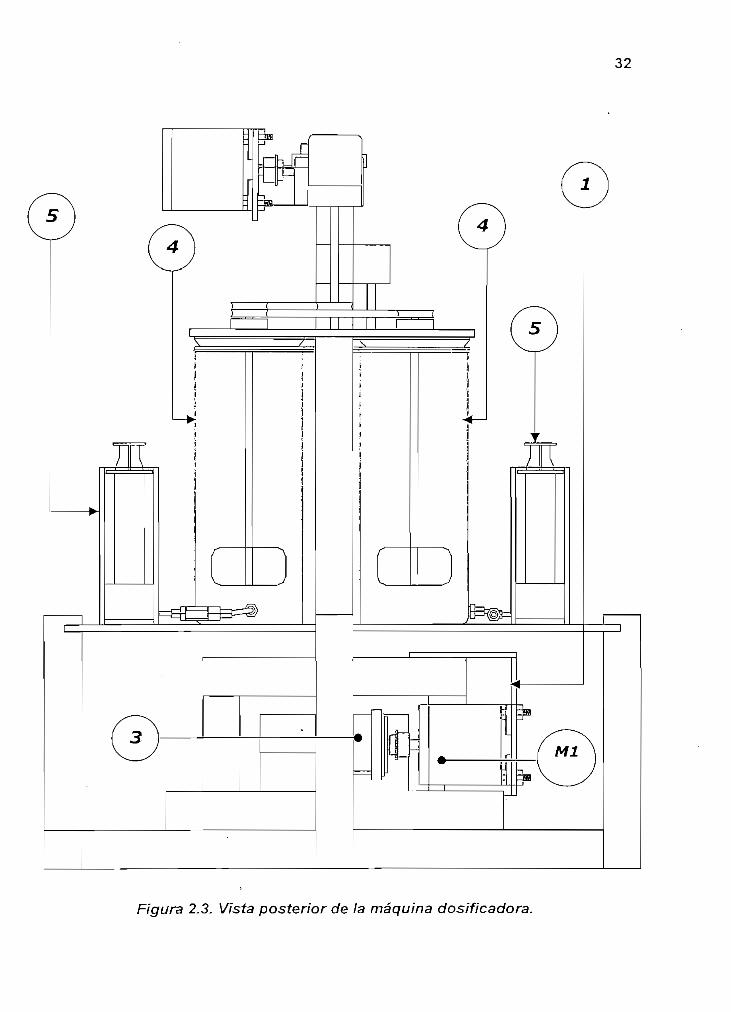
Figura 2.3. Vista posterior de la máquina dosificadora.

33
2.2.2.1 Soporte 1 del motor MI.
Este soporte mantiene fijo y seguro al motor para asegurar un correcto
funcionamiento, está construido de acrílico y madera, su parte superior está formada
por una parte de acrílico movible para que, en el caso que se requiera dar
mantenimiento al motor, se pueda sacar de su ubicación, esto es posible además
porque al motor se lo sujeta por medio de pernos (Ver figura 2.3. numeral 1).
2.2.2.2 Motor Mi de pasos.
Motor que gira a la mesa con sus componentes, a la posición adecuada para la
succión y expulsión de la pintura dosificada (Ver figura 2.3. M1).
2.2.2.3 Caja de aumento de torque para el motor MI.
Esta caja aumenta el torque del motor, está formada por dos piñones el uno
acoplado al eje del motor y el otro al eje de la mesa de rotación (Ver figura 2.3.
numeral 3).
2.2.2.4 Cilindros contenedores de los colores primarios.
Están hechos de plástico y almacenan la pintura, cada cilindro contiene un tapa para
evitar que entre impurezas del medio externo a la pintura almacenada (Ver figura
2.3. numeral 4).
2.2.2.5 Cilindros desucción-expulsión.
Permiten absorber y expulsar la pintura dosificada requerida para obtener el color
deseado, trabajo que se consigue, con la ayuda de las válvulas check, los cilindrosr-f
son de plástico y están formados por un pistón que contiene un émbolo de caucho
(Ver figura 2.3. numeral 5).

34
Figura 2.4. 'Vista superior de la máquina dosificadora.

35
2.2.2.6 Válvulas check.
Se tienen 6 válvulas, 2 por cada cilindro contenedor de los colores primarios, se
encuentran colocadas en forma horizontal sobre la mesa de acrílico; Para un cilindro,
una de ellas está conectada a los cilindros donde se almacena la pintura, en el
momento de la succión, permite el paso de la pintura desde los cilindros
contenedores hacia el cilindro de succión y en la expulsión hacia el envase de
mezclado, esta válvula evita que la pintura dosificada regrese hacia el cilindro
contenedor de los colores primarios ; la otra válvula, el momento de la succión evita
que entre aire por la manguera de expulsión de la pintura.
Lo anterior se repite para los dos cilindros contenedores de los colores primarios (Ver
figura 2.4. numeral 6).
2.2.2.7 Mangueras.
Conducen la pintura desde los cilindros contenedores de los colores primarios,
pasando por las válvulas check, por los cilindros de succión-expulsión hasta el
envase de mezclado (Ver figura 2.4. numeral 7).
2.2.2.8 Acoples "T" para las mangueras.
En número de tres, estos acoples unen a las válvulas check en pares, con los
cilindros de succión-expulsión (Ver figura 2.4. numera! 8).
2.2.2.9 Mesa de batido.
Esta conformada por unas aspas que se localizan en cada cilindro, las cuales
mezclan la pintura contenida en ellos, para mantener la mezcla homogénea.
Las aspas figura 2.5 numeral 5 giran por medio de una banda que las unen al motor
de batido; esta banda se conecta a cada aspa con ruedas de poleas (Ver figura
2.4. numeral 9).

36
2.2.2.10 Soporte de la mesa de batido.
Este soporte mantiene fija a la mesa de batido, está construido de aluminio colocado
en el centro de la mesa de rotación. (Ver figura 2.6. numeral 10).
2.2.3 SOPORTE PRINCIPAL.
Es el perfil de aluminio colocado en forma vertical que parte de la base de soporte y
llega hasta la parte más alta del prototipo, es una guía para el brazo cuando
asciende o desciende el momento de la dosificación y soporte del motor de pasos
que mueve el tornillo sin fin.
Sus partes principales son:
11 Soporte 2 del motor M2.
M2 Motor M2 de pasos.
13 Caja de aumento de torque para el motor M2.
14 Varilla de fijación del brazo de succión y expulsión.
15 Torníilo sin fin.
16 Brazo de succión y expulsión.
17 Finales de carrera.
18 Soporte de la mesa de rotación.
19 Soporte para el motor de batido M3.
20 Motor de batido M3

37
II
Figura 2.5,Vista posterior de la máquina dosificadora de pintura.

38
Figura 2.6 Vista lateral de la maquina dosificadora de pintura.
39
2.2.3.1 Soporte 2 del motor M2.
Tiene la función de sujetar en forma adecuada al motor, está construido una parte de
acrílico y otra de aluminio, e! motor esta sujeto a este por medio de pernos para
facilitar el mantenimiento al motor (Ver figura 2.5 numeral 11).
2.2.3.2 Motor M2 de pasos.
Es el encargado de al girar en sentido horario, producir el movimiento ascendente del
pistón para absorber la pintura y en sentido antíhorario, expulsar la misma hacia el
envase de mezclado (Ver figura 2.5 M2).
2.2.3.3 Caja de aumento de torque para el motor M2.
Da mayor fuerza al motor cuando gira, está constituido por dos piñones el uno
acoplado al eje del motor, y el otro al tornillo sin fin (Ver figura 2.5 numeral 13),
2.2.3.4 Varilla de fijación del brazo de succión y expulsión.
Esta mantiene fijo al brazo de succión y expulsión para tener un adecuado
funcionamiento de la maquina el momento de la dosificación de la pintura (Ver figura
2.5 numeral 14).
2.2.3.5 Tornillo sin fin.
Permite convertir el movimiento circular del eje del motor M2 en un movimiento lineal
del brazo hacia arriba para la succión y hacia abajo para la expulsión de la pintura
(Ver figura 2.6 numeral 15).

40
2.2.3.6 Brazo de succión y expulsión.
El brazo sujeta de manera temporal el pistón que contiene cada uno de los cilindros
de succión-expulsión, y asi absorber y expulsar la pintura dosificada (Ver figura 2. 6
numeral 16).
2.2.3.7 Finales de carrera.
Estos finales de carrera evitan en el caso de una operación inadecuada del motor
daños tanto en el soporte principal como en el motor M2 (Ver figura 2.6 numeral
17).
2.2.3.8 Soporte de la mesa de rotación.
Este mantiene fijo aún más a la mesa de rotación el momento de la succión y de la
expulsión de la pintura, y asi evitar que ia mesa sufra algún daño o incluso la ruptura
de la misma, este soporte esta hecho de aluminio (Ver figura 2.6 numeral 18).
2.2.3.9 Soporte para el motor M3.
Mantiene fijo al motor de batido (Ver figura 2.6 numeral 19).
2.2.3.10 Motor de batido M3.
Es un motor de DC colocado sobre una extensión de la máquina sobre los cilindros
contenedores de pintura, su función es mover las aspas de batido y mezclar la
pintura el control de los motores se ejecuta como se indica en el anexo 3 ,para que
esta no se seque en el fondo y permanezca uniforme en los cilindros ( Ver figura 2.
M3).

41
2.2.4 TABLERO DE MANDO.
Permite la operación de la maquina dosificadora de pintura, en este se encuentra la
protección de la máquina en el caso de presentarse cortocircuitos en el sistema. El
tablero esta conformado por:
1 Switch ON/OFF.
2 Teclado,
3 Display,
4 Fusible.
2.2.4.1 Switch on/off.
Enciende y apaga la máquina, la operación de apagado se realiza únicamente en e!
caso de presentarse algún daño en la máquina o en e! caso de mantenimiento de la
misma (ver figura 2.7 numeral 1).
2.2.4.2 Teclado.
Por el teclado se ingresa el código del color que se desea obtener está conformado
por los números del O al 9, por los símbolos # y * y por las letras A, B, C y D las letras
A, B y C permiten reconocer el color primario que se va a usar, en este caso; A =
color amarillo, B = color azul y C = color rojo.
Los números, indican cuántas unidades van de un determinado color primario, por
ejemplo si un color en el pantón es: A2B3C7 entonces se tendrá: dos unidades de
color amarillo, 3 unidades de color azul y 7 unidades de color rojo (ver figura 2.7
numeral 2).

42
2.2.4.3 Display.
Por el se observa el código que se ingresó a través del teclado, como también una
frases de inicio y mensajes de error en e! caso de una mala operación de la máquina
dosificadora de pintura (ver figura 2.7 numeral 3),
2.2.4.4 Fusible.
Es la protección de la máquina en el caso de presentarse un cortocircuito en el
sistema ( ver figura 2.7 numeral 4).
0
n n n nnnnn.nnotrnnnn
<D
Figura 2.7 Tablero de control

43
2.3 FUNCIONAMIENTO DE LA MAQUINA DOSIFICADORA DE
PINTURA.
Una vez que se ha escogido el color que se desea del pantón, se procede a digitar
en el teclado el código del color, seguido de esto comienza a funcionar el motor M1
en sentido horario que sube el brazo de succión y expulsión, por medio del tornillo sin
fin; una vez que se tenga ia dosificación adecuada del color amarillo, el motor M1
gira en sentido inverso permitiendo bajar el brazo y así expulsar la pintura hacia el
envase de mezclado. Este control se ejercuía como se indica en el diagrama de flujo
del anexo 3.
Terminada la dosificación del primer color la mesa gira hasta colocarse en el
siguiente cilindro que es el azul y se realiza la misma operación que para el color
amarillo, nuevamente la mesa gira repitiéndose el proceso anterior para el color rojo.
Finalmente la mesa gira hasta ubicarse en su posición inicial, luego de lo cual
funciona el motor M3 que permite batir a los colores en los cilindros contenedores de
los colores primarios para mantener ia pintura homogénea, luego de lo cual la fuente
que alimenta a los motores se apaga y en el LCD se muestra la frase "INGRESE
"CÓDIGO", dando la oportunidad de ingresar otro código.
Es necesario indicar que en el caso de necesitarse una tonalidad específica de un
solo color por ejemplo: A5BOCO, la máquina trabaja de igual manera que lo expuesto
anteriormente con la diferencia, que el cilindro de succíón-expulsión no succionaría
pintura ni del color azul ni del color rojo, únicamente se posicionaría en estos
cilindros.

44
INTRODUCCIÓN A LOS MOTORES PASO A PASO
2.4.1 ¿Qué es un motor paso a paso?
Como todo motor, es en esencia un conversón electromecánico, que transforma la
energía .eléctrica en mecánica; pero de un modo tan peculiar que constituye en la
actualidad una categoría aparte.
En efecto, mientras un motor convencional gira libremente al aplicar una tensión
comprendida dentro de ciertos límites (que se corresponden de un lado al par mínimo
capaz de vencer su propia inercia mecánica, y de otro a sus propias limitaciones de
potencia); el motor paso a paso está concebido de tal manera que gira un
determinado ángulo proporcional a la "codificación" de tensiones aplicadas a sus
entradas (4, 6, etc.). La posibilidad de controlar en todo momento esta codificación
permite realizar desplazamientos angulares lo suficientemente precisos,
dependiendo el ángulo de paso (o resolución angular) del tipo de motor (puede ser
tan pequeño como 1,80° hasta unos 15°). De este modo, si la aventura angular es de
1,80° por paso, para completar una vuelta serán necesarios 200 pasos.
De la misma manera que se puede posicionar el eje del motón, es posible contnolar la
velocidad del mismo, la cual será función directa de la frecuencia de variación de las
codificaciones en las entradas. De ello se deduce que el motón paso a paso pnesenta
una pnecisión y repetitividad que lo habilita para trabajar en sistemas abiertos sin
realimentación.
2.4.2 Motores paso a paso con rotor de imán permanente.
En lo que se refiere a la esencia de su funcionamiento, un motor paso a paso
clásicamente siempre se ha companado a un motón síncnono: un campo magnético
rotativo, controlado aquí pon un dispositivo electnónico, pone en funcionamiento al
rotor, que es un imán permanente.

45
En este tipo de motores, como en todos, caben destacar dos partes principales (rotor
y estator); como se puede ver en la figura 2.8, estos motores pueden constar de dos
o más estatores, oportunamente bobinados.
En todo instante, el campo magnético producido por una de las fases en particular
dependerá de la intensidad de corriente de esa fase. Si la intensidad es cero, el
campo magnético también será nulo. Si la intensidad es máxima, el campo
magnético tendrá una fuerza máxima.
Por otro lado, dado que e! rotor es un imán permanente, si se permite el giro de éste
dentro de un campo magnético, acabará por orientarse hasta la total alineación con
el campo. De otro lado, si e! campo magnético giratorio es intenso, se origina un par,
capaz de accionar una determinada carga.
Dependiendo del tipo de bobinas que se encuentran devanadas simétricamente
sobre los estatores (y, por tanto, del modo de crear el campo giratorio) se pueden
clasificar estos tipos de motores en:
Paso a paso bipolares.
- Paso a paso unipolares.
2.4.3 Motores paso a paso bipolares.
En el esquema de la figura 2.8 aparece uno de estos motores con dos estatores,
sobre cada uno de los cuales se ha devanado una bobina (1 y U), las cuales se
encuentran conectadas directamente a unos conmutadores de control que, como se
verá más adelante, podrán ser sustituidos por las líneas de entrada y salida de
nuestro ordenador debidamente programadas.
Como las bobinas se encuentran distribuidas simétricamente en torno al estator, el
campo magnético creado dependerá en magnitud de la intensidad de corriente por
cada fase, y en polaridad magnética, del sentido de la corriente que circule por cada
bobina. De este modo el estator adquiere la magnetización correspondiente,

46
orientándose el rotor según ella (figura 2.8. a). Si el interruptor 1.1 se conmuta a su
segunda posición (figura 2.8. b), se invierte el sentido de la corriente que circula por
T y por tanto la polaridad magnética, volviéndose a reorientar el rotor (el campo ha
sufrido una rotación de 90° en sentido antihorario, haciendo girar el rotor 90° en ese
mismo sentido). Con esto se llega a la conclusión de que para dar una vuelta
completa serian necesarios cuatro pasos de 90° cada uno (el ciclo completo se
puede seguir en la figura 2.8. a,b,c,d).
Ahora bien, este tipo de motores también pueden funcionar de un modo menos
"ortodoxo", pero que nos va a permitir doblar el número de pasos, si bien a costa de
la regularidad del par. Esto se consigue de la siguiente manera: en principio, al igual
que en el anterior fondo de funcionamiento, por los devanados T y U se hace circular
una corriente, de tal modo que el estator adquiere la magnetización correspondiente
y por lo tanto el rotor se orienta según ella. Ahora bien, al contrario que en el caso
anterior, antes de conmutar el interruptor 1.1 a su segunda posición, se desconectará
el devanado T, reorientándose por consiguiente el rotor, pero la mitad de un paso
(45°).
Figura 2.8. Motor paso a paso bipolaren modo de pasos completos.

47
2.4.5 Motores paso a paso unipolares.
Los motores paso a paso unipolares, en cuanto a construcción son muy similares a
los anteriormente descritos excepto en el devanado de su estator (figura 2.9.), En
efecto, cada bobina del estator se encuentra dividida en dos mediante una derivación
central conectada a un terminal de alimentación. De este modo, el sentido de la
corriente que circula a través de la bobina y por consiguiente la polaridad magnética
del estator viene determinada por el terminal al que se conecta la otra línea de la
alimentación, a través de un dispositivo de conmutación.
Por consiguiente las medias bobinas de conmutación hacen que se inviertan los
polos magnéticos del estator, en la forma apropiada. Nótese que en vez de invertir la
polaridad de la corriente como se hacía en los M.P.P. bipolares se conmuta la bobina
por donde circula dicha corriente.
Figura 2.9. Motor paso a paso unipolar con distintas secuencias
según la alimentación del estator.

48
Al igual que los M.P.P. bipolares, es posible tener resoluciones de giro
correspondientes a un semipaso. Ahora bien, dado que las características
constructivas de estos motores unipolares son idénticas a las de los bipolares, se
puede deducir que los devanados tanto en uno como otro caso ocuparán el mismo
espacio, y por tanto es evidente que por cada fase tendremos menos vueltas o bien
el hilo de cobre será de una sección menor. En cualquiera de los dos casos se
deduce la disminución de la relación de amperios / vuelta. Por tanto, a igualdad de
tamaño los motores bipolares ofrecen un mayor par.
Hasta aquí se ha venido describiendo el funcionamiento de los M.P.P. con dos
estatores, si bien es posible aumentar el número de éstos para mejorar la resolución
angular.
Debido a las características del motor paso a paso, si se aumenta la velocidad, se
reduce e! par. Esto se debe a que las bobinas se tienen que cargar para producir el
giro del motor, pero este proceso de carga no es un pulso perfecto sino que se trata
de una curva, por lo que es necesario esperar el tiempo necesario para que la curva
llegue a un mínimo. Si se aumenta mucho la velocidad, la duración de los pulsos que
reciben las bobinas disminuye y por tanto, no da tiempo a que se carguen totalmente,
disminuyendo su fuerza.
Existen dos secuencias básicas en función del número de bobinas activadas al
mismo tiempo:
- Secuencia básica.
- Secuencia doble.
Secuencia básica: Consiste en activar cada una de las bobinas de forma
independiente. Esto provoca que e! eje del motor se oriente hacia la bobina activada.

49
N° j
Paso i
1 I
2i
3 ;
4
Bobina j
4 j
1 !
0 j
o ;0 '
Bobina
3 i
0 !
1 ;
0
0
Bobina i
2 ;
0 j
0
1
0
Bobina !
1 ;
0 :
0 :.
0
1
Tabla 2.1. Secuencia básica
Secuencia doble: Consiste en activar dos bobinas al mismo tiempo, ambas
consecutivas, de modo que el eje del motor se oriente hacia el punto medio de
ambas bobinas.
N°
Paso
1
2
3
4
Bobina
4
1
0
0
1
Bobina
3
1
1
0
0
Bobina
2
0
1
1
0i
Bobina
1
0i
0
1
1
Tabla 2.2. Secuencia doble

50
Ambas secuencias permiten manejar el mismo ángulo de giro, pero sitúan el motor
en posiciones distintas.
Si combinamos ambas secuencias, el resultado que se obtiene es un paso más corto
(de echo es la mitad del paso generado en las anteriores secuencias) y se sitúa e!
motor en todas las posiciones de las secuencias anteriores, dando lugar a la
secuencia de "medio paso":
N° Paso
1 :
2
34 :
51
6
7
8
Bobina 4
1
1
0
0
0 !
o |0
1
Bobina 3
0
1
1
1
0
0
0 ¡
0
Bobina 2
°0
011
10
0
Bobina 1
°0
0
0
o ;
1 i¡1 ii1 ji
Tabla 2.3. Secuencia de medio paso

51
CAPITULO 3
HARDWARE Y SOFTWARE

52
3.1 INTRODUCCIÓN
Aquí se detallará el circuito electrónico empleado para realizar la dosificación de
pintura, cuya parte principal esta compuesta por un microcontrolador PIC 16F873, el
cual mediante un programa que se encuentra grabado en él, recoge las señales
enviadas desde el teclado y finales de carrera, las procesa y controla el
funcionamiento de los motores, el activado de su fuente y un LCD que será quien
permita al sistema comunicarse con el exterior.
3.2 HARDWARE
Es la parte física del sistema, está formada por los circuitos integrados, placas, etc.,
que hacen posible que el sistema realice su función las placas se encuentran en e!
anexo 4 "PLACAS DEL CIRCUITO DE CONTROL" y el diseño de las mismas en el
anexo 5 "DISEÑO DE LAS PLACAS DEL CIRCUITO DE CONTROL".
3.2.1 MICROCONTROLADOR PIC 16F873.
Analizando el número de entradas y de salidas que necesita el prototipo de acuerdo
a los elementos que se manejan y controlan, se escogió al microcontroiador PIC
16F873 presentado en la figura 3.1, este fue seleccionado debido a la facilidad de
encontrarlo en el mercado, su fácil manejo y suficiente memoria para el programa.
Las principales características de! PIC 16F873 son: un encapsulado de 28 pines, tres
puertos (A, B, C), una memoria RAM de 192 bytes, frecuencia máxima de 20 MHz,
13 fuentes de interrupción, una memoria EEPROM de 128 bytes, 5 canales A/D y 22
líneas de entrada /salida.
Para su correcto funcionamiento necesita de una fuente de alimentación que se
conecta a Vdd; su tierra a Vss presente en dos pines (pines 8 y 19), posee dos pines
OSC1 y OSC2 a los cuales se conecta el oscilador con dos capacitores (9 y 10), y
un pin de reset señalado como Vpp (pin 1) el cual siempre debe estar conectado a

53
1 lógico para que puede correr el programa, lo que se logra conectándolo a Vcc
mediante una resistencia.
RESET J> ¿r-t —•_Z'
4cr
G— i(
B
-L- OSC i >-jTT-f-}(~-C'J~^ ""-• •
II121314
VPPRñ0RHlRP2RASRH4RH5VssOSC1OSC2
RC0RC1RC2RC3
RB7C'Or*KoLj
RB5RB4RB3RB2RB1RB0VddVsc
RC7RCGRC5RC4
¿Z.O
272F.2524¿r!ci,-~' ,•"•'21gQ __.-- ,
13 • '
1817 —1G15
PIC1GFS73
Figura 3.1. Mícrocontrolador PIC 16F873 con sus principales
pinos: Vcc (alimentación de +5V), RESET, GND
(tierra) y las entradas para el cristal designadas
como OSC1 y OSC2.
3.2.1.1 Fuente
E! microcontrolador necesita una fuente de alimentación de +5V (figura 3.2) por lo
que se emplea el LM7805, un regulador de voltaje que entrega +5 V y la corriente
necesaria; tanto a la entrada como a la salida del circuito se encuentran capacitores
de 100uF que filtran el rizado que se presenta tanto a la salida del diodo rectificador
como del regulador; se tiene un fusible como protección de la fuente en caso de una
54
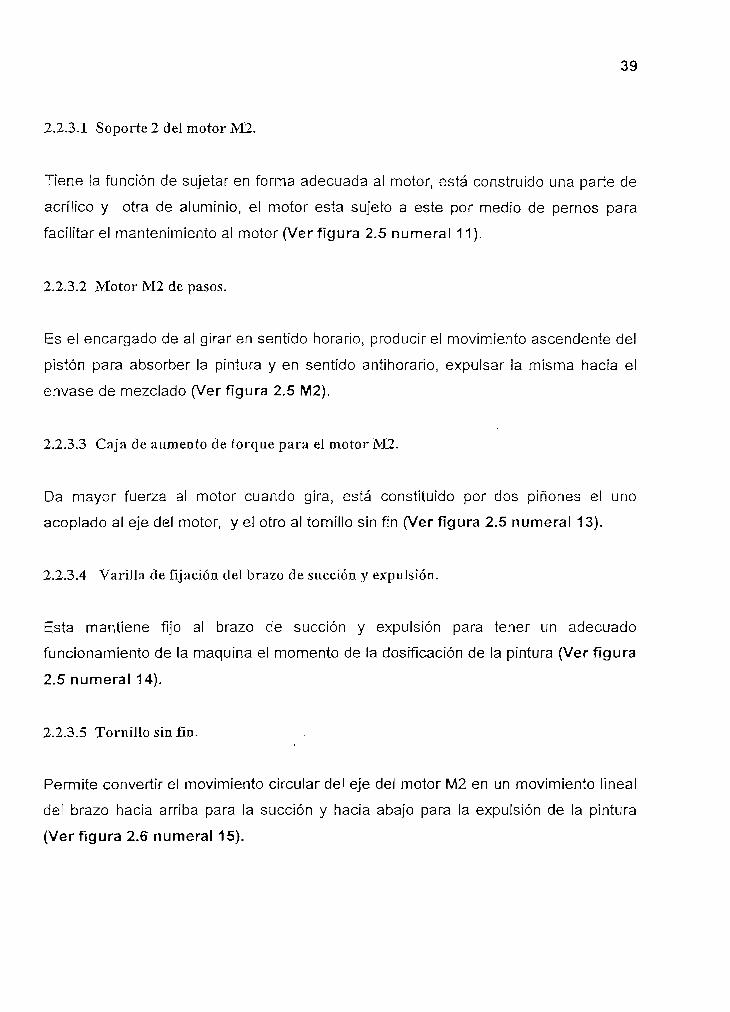
falla que produzca un incremento brusco de la corriente sobre los valores permitidos
para la misma.
El transformador de la fuente es de 120V a 9V suficientes para que el regulador
funcione, debido a que necesita a su entrada ( pin 1) un voltaje superior al que va ha
regular en DC.
FUSIBLE
120V J* *LM7805
RMPDORXXr
f C TND 4
;VCC C+5V3 I
Figura 3.2. Fuente de alimentación del PIC.
3.2.1.2 Oscilador.
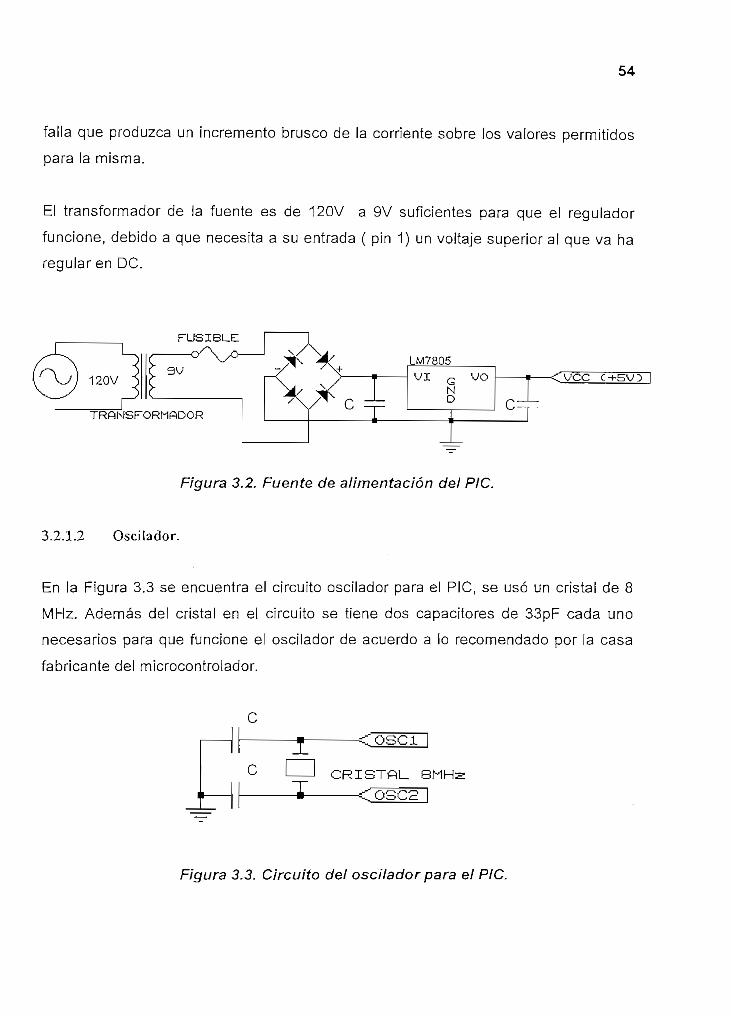
En la Figura 3.3 se encuentra el circuito oscilador para el PIC, se usó un cristal de 8
MHz. Además del cristal en el circuito se tiene dos capacitores de 33pF cada uno
necesarios para que funcione el oscilador de acuerdo a lo recomendado por la casa
fabricante del microcontrolador.
C
C
OSC1
XCRISTAL SMHs
OSC2
Figura 3.3. Circuito del oscilador para el PIC.
55
3.2.1.3 ResetdelPIC.
El circuito de reset del PIC permite reinicializar todo el programa el momento que se
presente algún error externo al sistema, sin embargo este reset no garantiza que el
momento que el programa vuelva a ejecutarse el error que produjo el fallo en el
sistema sea superado, pues si este fallo se presentó por un mal funcionamiento del
sistema el error volverá a presentarse hasta que se lo repare.
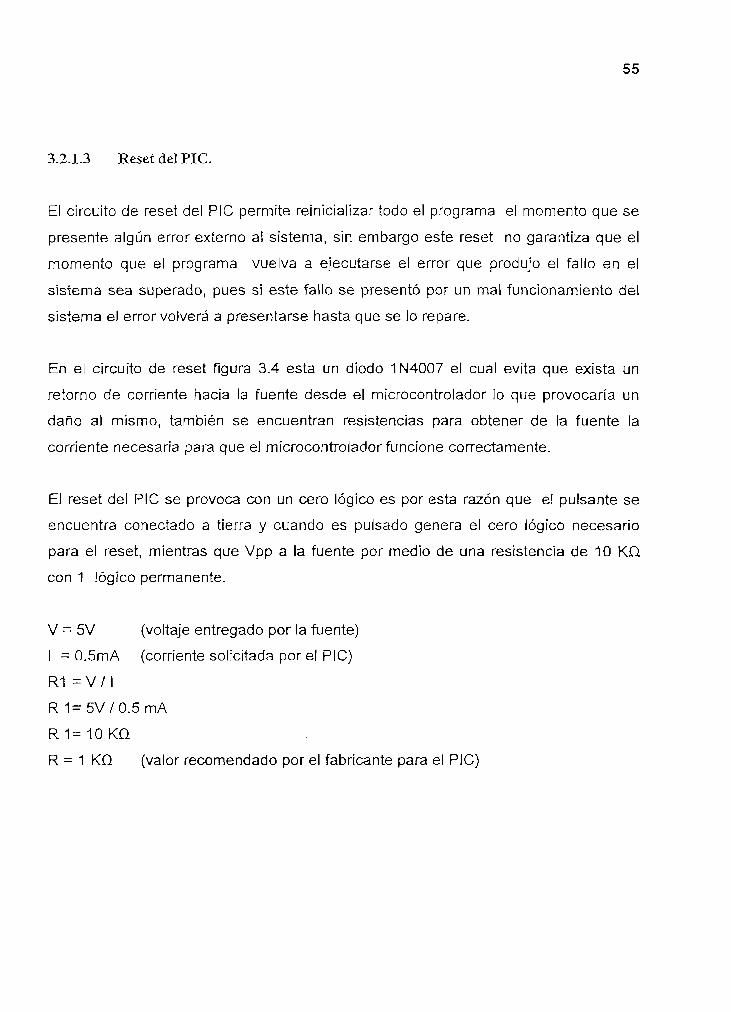
En el circuito de reset figura 3.4 esta un diodo 1N4007 e! cual evita que exista un
retorno de corriente hacia la fuente desde el microcontrolador lo que provocaría un
daño al mismo, también se encuentran resistencias para obtener de la fuente la
corriente necesaria para que el microcontrolador funcione correctamente.
El reset del PIC se provoca con un cero lógico es por esta razón que e! pulsante se
encuentra conectado a tierra y cuando es pulsado genera el cero lógico necesario
para el reset, mientras que Vpp a la fuente por medio de una resistencia de 10 KD
con 1 lógico permanente.
V = 5V (voltaje entregado por la fuente)
I = O.SmA (corriente solicitada por el PIC)
R1 = V / 1
R1=5V/ O.SmA
R1=10KQ
R = 1 KO (valor recomendado por el fabricante para el PIC)

56vcc
R
1N40GT
—<LRE5ET
Figura 3.4. Circuito de reset del PIC
3.2.2 CIRCUITOS BE CONTROL
Estos circuitos son los que permiten al micrcontrolador recibir y comunicar las
ordenes para controlar el funcionamiento del prototipo; [as acondiciona para que el
PIC mediante el programa interprete las señales y responda de acuerdo a lo
programado.
3.2.2.1 Circuito para el teclado.
El teclado es la comunicación entre. el operador del prototipo y el PIC para que el
usuario le entregue un código según un panton predefinido en donde se establece un
código de color asigando a cada caso, y el controlador pueda gobernar a los
motores entregando la dosificación de pintura solicitada.
Es un teclado matricial 4x4 manejado por barrido con la ayuda de un Cl 74LS139
que es un demux controlado por dos entradas, cuatro salidas y una habilitación
conectada a tierra para que el integrado funcione permanentemente con la tabla de
verdad 3.1. las dos entradas de este circuito están controladas por el
57
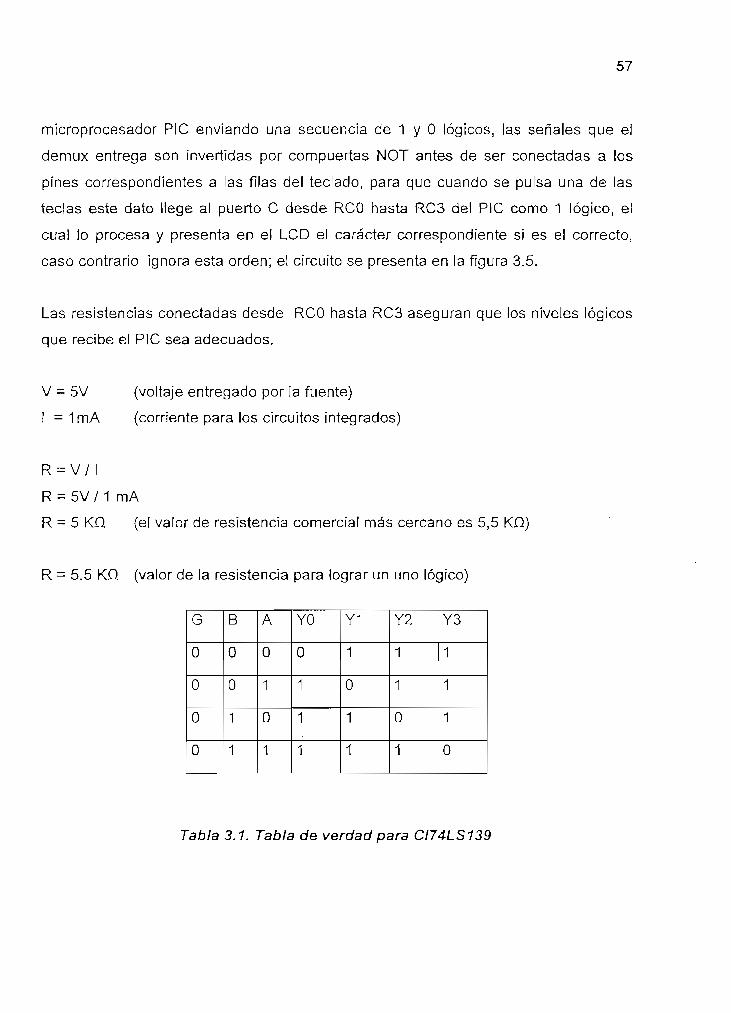
microprocesador PIC enviando una secuencia de 1 y O lógicos, las señales que el
demux entrega son invertidas por compuertas NOT antes de ser conectadas a los
pines correspondientes a las filas del teclado, para que cuando se pulsa una de las
teclas este dato llege al puerto C desde RCO hasta RC3 del PIC como 1 lógico, el
cual lo procesa y presenta en el LCD el carácter correspondiente si es el correcto,
caso contrario ignora esta orden; el circuito se presenta en la figura 3,5.
Las resistencias conectadas desde RCO hasta RC3 aseguran que los niveles lógicos
que recibe el PIC sea adecuados.
V = 5V (voltaje entregado por la fuente)
I =1mA (corriente para los circuitos integrados)
R = V/l
R = 5V /1 mA
R - 5 KQ (el valor de resistencia comercial más cercano es 5,5 KD)
R = 5.5 KO (valor de la resistencia para lograr un uno lógico)
G
0
0
0
0
B
0
0
1
1
A
0
1
0
1
YO
0
1
1
1
Y1
1
0
1
1
Y2
1
1
0
1
Y3
1
1
1
0
Tabla 3.1. Tabla de verdad para CI74LS139

58
TECLADO
Ci C2 C3 C4 Fl F2 F3 F4
Figura 3.5. Circuito para el teclado
3.2.2.2 Circuito para los finales de carrera.
Los finales de carrera son empleados como una seguridad para que los motores no
se dañen, debido a una falla en los circuitos de acondicionamiento que se emplean
para que el PIC controle a los motores.
En el prototipo están presentes tres finales de carrera los dos primeros se
encuentran en el tornillo sin fin que sin/e para levantar el brazo, uno en ía posición
mínima del brazo y el segundo en la máxima, las mismas que por programa nunca se
alcanzarían si la máquina esta funcionando correctamente, y el tercero sobre la parte
movible del soporte del motor que gira a la mesa de rotación mostrado en la figura
2.1 numeral 1, para que cuando la mesa se trabe y no lo accione luego de un tiempo,
se genere un bloqueo del sistema para evitar daños.
Se debe solucionar el problema antes de volver a usar la máquina, cabe indicar que
mientras no se solucione el mismo, el sistema no funcionará aunque se resete como
una precaución para el operador.
El circuito de acondicionamiento para los finales de carrera figura 3.6. consta de
compuertas ÑOR para que el microcontrolador reciba señales lógicas que pueda
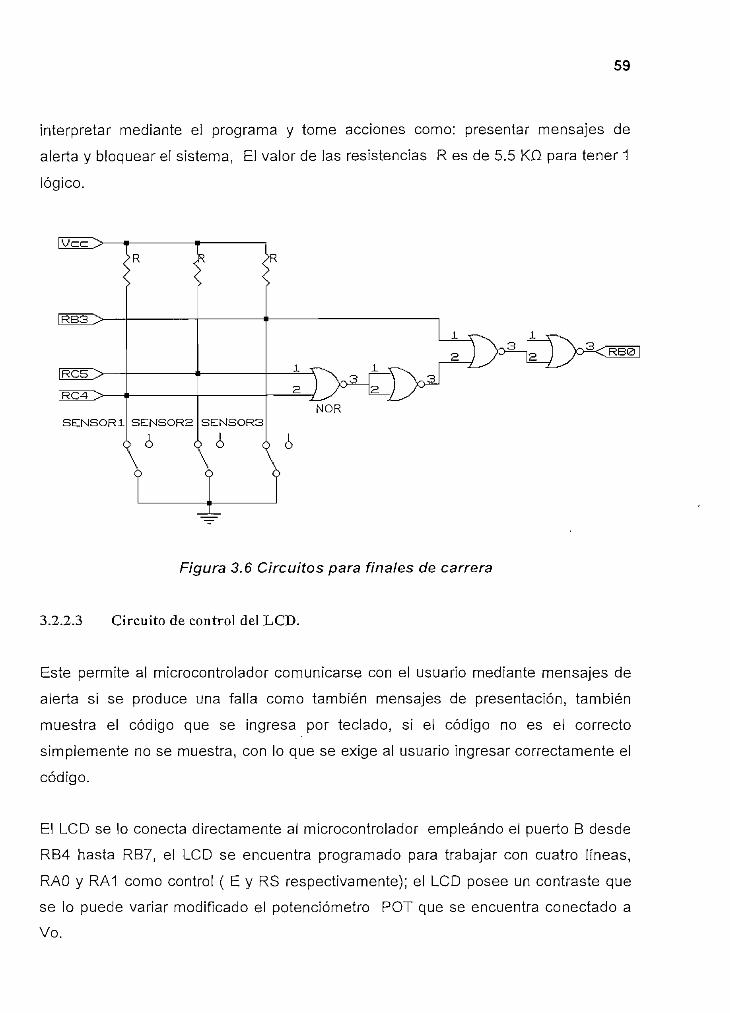
59
interpretar mediante el programa y tome acciones como: presentar mensajes de
alerta y bloquear el sistema, El valor de las resistencias R es de 5.5 Kü para tener 1
lógico.
SENSORl SENSOR2
o ¿SENSOR3
ÑOR
V ¿
Figura 3.6 Circuitos para finales de carrera
3.2.2.3 Circuito de control del LCD.
Este permite al microcontrolador comunicarse con el usuario mediante mensajes de
alerta si se produce una falla como también mensajes de presentación, también
muestra el código que se ingresa por teclado, si el código no es el correcto
simplemente no se muestra, con lo que se exige al usuario ingresar correctamente el
código.
El LCD se lo conecta directamente al microcontrolador empleando el puerto B desde
RB4 hasta RB7, el LCD se encuentra programado para trabajar con cuatro líneas,
RAO y RA1 como control ( E y RS respectivamente); el LCD posee un contraste que
se lo puede variar modificado el potenciómetro POT que se encuentra conectado a
Vo.

60
GND y R/W están conectados ambos a tierra pues solo se va a realizar operaciones
de escritura. Tierra del LCD se encuentra en Vss y su voltaje de polarización de +5V
se conecta a Vdd; el circuito para el LCD se presenta en la figura 3.7.
El valor de POT es de 50 KO recomendado por los fabricantes.
LCD
R/W Vdd Vo RS E D0 Di D2 D3 D4 DS DS D7
POT
Figura 3.7. Circuito de control del LCD.
3.2.3. Circuitos de potencia.
Son los encargados de comunicar las ordenes del PIC a los motores, por ellos circula
una gran corriente por lo que no pueden ser conectados directamente al PIC, y por
programa son activados luego de los circuitos de control.
3.2.3.1 Circuito de control de motores.
Esta formado por 7 TIP121 que entregan a las bobinas de los motores de paso
empleados, la corriente necesaria para que el motor de un paso, sobre la base de
una secuencia de pulsos dados por el PIC a un demux 74LS138 que tiene tres
entradas para datos, tres líneas de control y seis salidas, las que están conectadas a
compuertas NOT para que los pulsos lleguen a opto transistores 4N25 que se
encuentran conectados a la fuente de los motores y estos a su vez a los TIPs para

61
que amplifiquen la corriente pues la fuente no puede entregar toda la corriente
necesaria, los opto transistores protegen y aislan a los circuitos de control de los
circuito de potencia figuras 3.8 y 3.9.
Los datos que llegan al Cl 74LS138 son entregados por RB1 y RB2, y un pin del
puerto A (RA5), la línea de habilitación G1 esta conectada a Vcc por medio de una
resistencia de 10 KQ para tener 1 lógico permanente y habilitar al demux, de igual
manera G2B está conectado a tierra para que el funcionamiento del demux dependa
únicamente del estado lógico que tenga G2A el cual esta conectado a RA4, la tabla
de verdad del demux corresponda a la tabla 3.2.
G2A
0
0
0
0
C
0
0
0
0
B
0
0
11
A
0
1
0
1
YO
0
1
1
1
Y1
1
0
1
1
Y2
1
1
0
1
Y3
1
1
1
0
Y4
1
1
1
1
Y5
1
1
1
1
Y6
1
1
1
1
Y7
1
1
1
1
Motor de paso 1
G2A
0
0
0
0
1
C
1
1
1
1
X
B
0
0
11X
A
0
1
0
1
X
YO-
1
1
1
1
1
Y1
1
1
1
1
1
Y2
1
1
1
1
1
Y3
1
1
1
1
1
Y4
0
1
1
1
1
Y5
1
0
1
1
1
Y6
1
1
0
1
1
Y7
1
1
1
0
1
Motor de paso 2
Tabla 3.2. Tabla de verdad del Cl 74LS138

62
POTENCIA
VDD c+sv:- i<BOBINA DE MOTOR
TIP121
TIERRA DE LOS MOTORESPASO ft PASO
Figura 3.8. circuito de acoplamiento entre la parte de control con la de potencia
El circuito de la figura 3.8 permite acoplar el circuito de control con el de potencia,
además la conexión de la fuente con cada bobina de los motores paso a paso
entregando la secuencia dada por ia tabla 3.2.
En el circuito indicado los valores de cada uno de sus elementos son los siguientes:
R1 = 1 KO recomendado para el T1P121 mientras que R se calcula de la siguiente
forma:
Vdd = 5V (voltaje de la fuente para los motores)
le = 1A (corriente necesaria para que el motor de un paso)
(3 = 1000 (característica del TIP121)
Ib = l c / p
Ib =1 A/1000
Ib =1mA
V1 = Vdd - 1.4V (transistor Darlington)
V1 = 5V - 1.4V
V1 = 3.6V
R1 =V1/ ib
R1 =3.6V/1mA

63
R1 - 3.6KO (el valor de resistencia comercial más cercano es 3,3 Kfí)
R1 = 3.3 KO
La conexión de los motores paso a paso se [o realiza de acuerdo al siguiente circuito:
MOTOR DE PASOS
IVDD C+5V3BOBINA DE MOTOR CPOBOBINA DE MOTOR CBDSOBINA DE MOTOR CCI>BOBINA DE MOTOR CD}
FiguraS.9. Diagrama de conexión de los motores paso a paso
NOT
Figura 3.10. Conexión del CI 74LS138

64
3.2.3.2 Circuito de control de activado de la fuente de los motores,
Esta formado por un relé e! mismo que al recibir un pulso por parte del
microcontrolador se activa y conecta la fuente de los motores a la red, debido a que
un relé es un elemento mecánico y esta expuesto a daños se lo separó de las placas
tanto de control como de potencia para que en caso de que termine su vida útil se lo
pueda cambiar con facilidad sin necesidad de manipular las otras tarjetas.
La fuente para los relés se encuentra formada por un regulador LM7812 que entrega
+12V, capacitores para que el regulador pueda funcionar correctamente; este circuito
es similar a la fuente del PIC figura 3.2, con la diferencia que el integrado LM7805 se
remplaza por el LM7812.
Para la activación del relé es necesario darle un pulso el cual es entregado por un
transistor 2N3904; este pulso lo da el PIC por medio del pin RC6, Figura 3.10.
FUENTE PARA MOTORESPASO A PASO
k.
RC6 >— \ — K
¿
•4-
4-h
RELÉ (^
\i2N3904
1ZUV
7
+5V-sv
-12VGND
<VDD C-í-5V^ |C—VDD C— BV5CVPP C+Í2V5
R
Figura 3.11. Circuito de control de activado de la fuente de los motores

65
3.2.3.3. CIRCUITO DE CONTROL DE ACTIVADO DE LOS MOTORES DE
SUCCIÓN, ROTACIÓN Y BATIDO.
Los motores M1 y M2 están conectados a +5V y M3 a +12V según el circuito de la
figura 3.12, cabe indicar que el motor M3 que sirve para el batido de pintura no debe
funcionar mientras se realice la dosificación efectuada por intermedio de M1 y M2, el
PIC controla el encendido y apagado de los motores mediante el pin RC7 en un
circuito similar al de la activación de la fuente de motores figura 3.10.
La línea que se interrumpe o se habilita es la de tierra GND un momento está
conectada con los motores de succión y rotación y en otro instante con el motor de
batido de esta manera se protege que no funcionen al mismo tiempo estos tres
motores .Las resistencias R son iguales a 1 Kü para así lograr que el transistor
funcione como un interruptor.
El circuito se presenta junto con e! de activación de la fuente de motores para que se
pueda observar la relación que existe entre estos dos circuitos figura 3.11.
FUENTE PARA MOTORESPASO ft PASO
TIERRA DE LOS MOTORESIPPSO A PASO
777
MOTOR DE BATIDO
Figura 3.12. Circuito de control de activado de ios motores de succión, rotación
y batido.

66
3.2.4 ESQUEMÁTICO DE LOS CIRCUITOS QUE CONFORMAN EL
HARDWARE DE LA MÁQUINA DOSIFICADORA
Este se encuentra como parte de los anexos, permite tener una clara idea de la
ubicación de los componentes electrónicos como las interconexiones entre las
placas.
3.3 SOFTWARE.
Un sistema informático compuesto por: programas, procedimientos, normas y
estándares, conocido también como soporte lógico.
3.3.1 PROGRAMA DE CONTROL DEL DISPLAY DE CRISTAL LÍQUIDO LCD.
33.1.1 INICIACIÓN DEL LCD
Primero se envía el comando 20H para manejar al LCD con un formato de cuatro
bits, de 5 X 7 píxeles y una fila; para que el LCD interprete como comando se debe
colocar a RS en O lógico (RA1 = 0), la subrutína "PULSO" da el cambio de estado en
E (RAO de 1 a O lógico) para que se efectúe la operación, el tiempo necesario para
que e! LCD acepte los comandos o caracteres esta dado por la subrutina
"SHORTDEUVr.ver capítulo 5 pág 125.
Segundo se debe cambiar al LCD del formato de una fila a uno de dos filas
manteniendo ei de 5 X 7 píxeles, con el comando 28H en esta parte se emplea la
subrutina de "PORTNIBBLE" la cual será empleada para enviar los datos por
paquetes al LCD en un formato de cuatro bits; luego se procede a presentar el cursor
modo blink (intermitentemente) en la primera localidad del display con el envío del
comando OFH, terminado esto el LCD esta listo para que se pueda presentar
caracteres, según figura 3.13.

67
( W9CJO ¡i
RA1 «Q
2QH
PGRTO&LE
SKORTDELAY
SHCKTDBLAY
CQNT3 =
SHGRTDELAY
RJÍ.SO
PULSO
H
PORTW.BLE
PULSO
Figura 3.13. secuencia de iniciación del LCD

68
3.3.1.2 PRESENTACIÓN DE TEXTOS
Antes de la presentación de textos se procede a borrar lo que se encuentre ecríto en
la pantalla del LCD con el fin de que no se presente basura producto de la iniciación
del LCD, lo que esta acargo de la subruíina "CLEARDISPU\Y", figura 3.14, ver
capítulo 5 pág 133.
PQRTNIBLE
SHQRTQEIAY
PULSO
CONT3-1QH
PORTNIBLE
SHORTDELAY
PULSO
FIN.
Figura 3.14. Subrutina "CLEARDISPLAY"de borrado del LCD
Una vez que se ha limpiado la pantalla se carga las localidades de memoria
empleadas como registros con los valores respecivos: número de letras del texto en
CONT7, número de letras por fila en AUX, y se escoge el texto que se desea
presentar con AUX5 para llamar a la subrutina:
LETRAT: Presenta los textos ESC. POLITÉCNICA NACIONAL y BAYAS
PATRICIO PALIZLUIS.

69
LETRA: Presenta los textos DOSIFICADOR DE PINTURA, INGRESE
CÓDIGO y [as claves que se escriben por teclado.
LETRA2: Indica FALLA MOTOR DE SUCCIÓN, ROTACIÓN.
LETRA 3: Anuncia MODO AUTOMÁTICO, FALTA COLOR AMARILLO.
LETRA4; Presenta AZUL, ROJO
Según el siguiente diagrama de flujo figura 3.15.
C
Figura 3.15. Diagrama esquemático de flujo para la
presentación de textos en el LCD
70
Se debe colocar RS en 1 lógico para que el LCD diferencie entre caracteres y
comandos con lo que se presenta en la pantalla el carácter indicado de acuerdo con
las tablas de textos ubicadas ai inicio del programa desde "TEXT", hasta "TEXT9"
separadas para en caso de que se desee cambiar un texto se lo haga con facilidad.
Terminada la presentación el Pie envía la instrucción "1" lógico por RA2 y RAS
respectivamente al demux Cl 74LS139 que produce un cambio de estado lógico en
el, identificando nuevamente esta variación el PIC lo que podrá ser visualizado a
través del LCD como un indicador a la tecla que ha sido activada en el teclado para
que sea analizada mediante unas subrutinas llamadas "ORDEN1", "ORDEN2" Y
"ORDEN3" para establecer si el ingreso del código es el correcto, si lo es llama a la
subrutina "LETRA" para que presente en el LCD el código.
Se revisa los pines RC4, RC5 y RB3 para establecer si un motor presenta
problemas, si este fuera el caso se presenta los textos de falla de motores llamando
en este caso a la subruíina "LETRA 2".
Al terminar la dosificación se almacena en el registro R14 el número 6 con lo que se
ingresa a un contador del cual se puede salir si se pulsa una tecla, este contador
tiene dos fines, el primero es establecer el tiempo que la máquina se mantiene en
reposo antes de actuar en modo automático si no a sido empleado y el segundo es
que el PIC se encuentre en un modo de espera si no es pulsada una tecla, otra forma
de ingresar a este ciclo es presionando la tecla asterisco (*) lo que es recomendando
al inicio del funcionamiento del prototipo; una vez concluido ei tiempo del contador se
presenta eí texto de modo automático y se lo hace de la misma manera que para los
anteriores textos.
Una vez que ha sido aceptado el código, antes de encender los motores, se revisa el
historial de la cantidad de pintura que se ha empleado, si se ha sobrepasado la

71
cantidad permitida se presenta el texto de falta de pintura empleando similares
instrucciones que para los anteriores.
En la figura 3,15. se presentan los textos que muestra el display:
ESC. POLITÉCNICA
NACIONAL
BAYAS PATRICIO
PÁLIZ LUIS
DOSIFICADORDE
PINTURA
INGRESE CÓDIGO
Figura 3.15. Mensajes presentados en el LCD
El operador debe esperar que se muestren todos los textos antes mencionados y en
el mensaje texto INGRESE CÓDIGO aparecerá el cursor en el extremo inferior
izquierdo para que se pueda dígitar el código el cual se encuentra en el pantón y
deberá ser ingresado de izquierda a dercha empezando con la letra A como se
muestra en !a figura
La forma de ingresar un código es e! siguiente
INGRESE CÓDIGO
A1B1C1

72
Si antes de un tiempo preestabiecido no se ingresa un código el prototipo funciona
en MODO DE AUTOMANTENIMIENTO presentándose este mensaje en el LCD.
MODO DE AUTO
MANTENIMIENTO
El programa revisa si algún final de carrera esta activado, si uno de los dos lo esta
determina cuál es y presenta los siguientes textos:
FALLA MOTOR DE
SUCCIÓN
FALLA MOTOR DE
ROTACIÓN
De presentarse uno de los dos fallos antes mencionados la máquina entra en
STANDBY hasta que se arrregle el problema .
En caso de falta de color en los recipientes se presenta en el LCD.
FALTA COLOR
AMARILLO
FALTA COLOR
AZUL

73
FALTA COLOR
ROJO
Todos los textos se los a establecido pensando en que deben ser cortos y que den
un mensaje claro de tal manera que cualquier operador pueda manejar el prototipo.
33.2. PROGRAMA DE CONTROL DE LOS MOTORES DE SUCCIÓN, ROTACIÓN
Y BATIDO.
El control de ios motores se desarrolla en la subrutína "BORRADITO" donde en
principio se testea los finales de carrera para conocer el estado de los motores, luego
se revisa el nivel de pintura en los recipientes para proceder a llamar a la subrutina
"MOTOR" que conecta a la fuente de los motores a la red y los motores a esta
fuente; envía la secuencia de unos y ceros para que los motores de paso funcionen
por los pínes RB1, RB2 y RAS.
Los relés son controlados por lo pines RC6 y RC7, cuando se activa el pin RC6 se
conecta la fuente de los motores a la red con lo que se puede manejarlos, esto se
produce una vez que sea ingresado y aceptado el código, se haya verificado que no
existen problemas en los motores y que se tiene pintura suficiente para la
dosificación ver capítulo 5 pág 136.
3.3.2.1. Motor de succión.
Para controlar el número de vueltas que debe dar el motor se envía una secuencia
de 1 y O lógicos por RB1 y RB2, RA4 y RAS en O lógico.

74
La velocidad del motor esta controlada por la subrutína "JORQUE" mientras que el
número de vuleltas depende del código que se ingrese por teclado almacenado en
R6 y AUX3, en R1 esta la diferencia de dosificación de pintura que la máquina
succiona y expulsa.
Como protección del motor están dos finales de carrera que se conectan a los pines
RC4, RC5 se revisa los pines constantemente, si uno esta en 1 lógico se llama a la
subrutina "MOTORS" para bloquear el sistema y presentar el texto FALLA EN EL
MOTOR DE SUCCIÓN,
33.2.2. Motor de rotación.
De manera similar que al motor de succión se controla el número de vueltas con una
secuencia de 1 y O lógicos por RB1 y RB2, RAS en 1 lógico y RA4 en O lógico.
La velocidad de este motor es controlada por la subrutina "TORQUE2" y el número
de vuleltas se lo establece por programa en AUX3.
Se establece que esta bien el motor de rotación si RB3 esta en 1 lógico al inicio de la
operación de la máquina dosificadora y al final de cada sesión de sución y expulsión
de pintura no se presenta ningún texto, cuando no se ha pulsado el final de carrera
correspondiente al motor de rotación por programa se llama a la subrutina
"MOTORR" que bloquea el sistema y presenta el texto de FALLA EN EL MOTOR DE
ROTACIÓN.
33.23. Motor de batido.
Colocando RC7 en 1 lógico, se lo activa cuando se ha terminado la dosificación para
que se realice el batido, con esta acción se desconecta la fuente de los motores de
succión y rotación para conectarla al de batido, cumplido el tiempo de batido se
desconecta la fuente de la red con io que se apaga todos los motores, la activación

75
de los relés no se lo realiza en forma inmediata sino luego de un tiempo para no
tener problemas de rebotes
3.3.3. PROGRAMA DE CONTROL DEL TECLADO
Por programa el PIC envía una secuencia de unos y ceros por RA2 y RA3 los que
son recibidos por Cl 74LS139 y enviados al teclado y son constantemente revisados
los pines RCO, RC1, RC2 y RC3 para que cuando se pulse una tecla el uno enviado
se encuentre en estos pines con lo que se conoce que tecla fue presionada, una vez
que se lo a determinado se llama a las subrutinas "ORDEN1", "ORDEN2" y
"ORDEN3" para establecer sí se ha ingresado correctamente la clave y luego llamar
a la subrutina "BORRADITO" donde se activa a los motores previa la revisión de los
sensores y el nivel de pintura ver capítulos pág 127.
Sea que se haya presionado la tecla número o se haya terminado con éxito la
dosificación se ingresa a un contador que determina el tiempo antes del
funcionamiento automático.
Para evitar que algún corte de energía provoque daños en ia máquina se ha
programado que cada vez que sea utilizada se almacene en memoria EEPROM ia
cantidad de pintura empleanda para que nunca se sobrepase este límite, y cuando
con algún código se lo haga se presente los textos de FALTA COLÓ AMARILLO,
FALTA COLOR AZUL Y COLOR ROJO y se bloquea el sistema.

76
* CAPÍTULO 4
PRUEBAS, RESULTADOS Y ANÁLISIS TÉCNICO

77
4.1 NTRODUCCION
Para establecer el comportamiento de la máquina dosificadora de pintura se
efectuaron primero pruebas con agua y anilinas y finalmente con pintura midiendo
volúmenes de entrega para algunos códigos, repitiéndolos varias veces para
comprobar que la dosificación sea la misma, luego de lo cual se procedió a la
elaboración del pantón,
4.2 PRUEBAS Y RESULTADOS
Se ordenan los datos en tablas para un mejor análisis y establecer el
comportamineto del prototipo.
4.2,1 PRUEBAS CON AGUA
Las pruebas con agua están encaminadas a la identificación del volumen de succión
en los cilindros que para el caso, están llenos de agua y ala verificación que todos
tengan un comportamiento uniforme tanto en succión como en expulsión del liquido
de prueba. Se hizo las medidas con una jeringuilla clase 2 procurando que la
medición sea uniforme al ser el instrumento para todos los casos el mismo
CÓDIGO
VÁLVULA
1
2
3
DOLUMEN EN mi
A1B1C1
2.0
0.5
2.0
2.0
1.0
2.0
2.0
0.5
2.0
2.0
0.5
1.9
2.2
0.4
2.0
A2B2C2
7.5
5.5
6.5
7.0
5.0
6.5
7.0
5.5
6.5
6.9
5.0
6.5
7.0
5.1
6.5
Sigue.
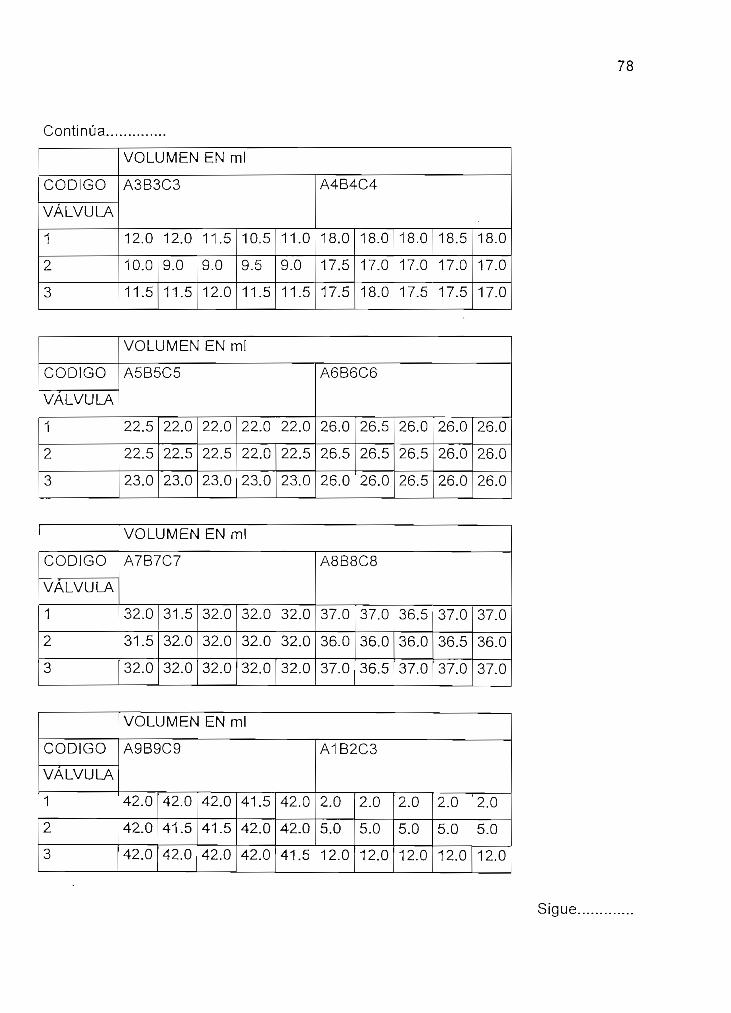
78
Continúa.
CÓDIGO
VÁLVULA
1
2
3
VOLUMEN EN mi
A3B3C3
12.0
10.0
11.5
12.0
9.0
11.5
11.5
9.0
12.0
10.5
9.5
11.5
11.0
9.0
11.5
A4B4C4
18.0
17.5
17.5
18.0
17.0
18.0
18.0
17.0
17.5
18.5
17.0
17.5
18.0
17.0
17.0
CÓDIGO
VÁLVULA
1
2
3
VOLUMEN EN mi
A5B5C5
22.5
22.5
23.0
22.0
22.5
23.0
22.0
22.5
23.0
22.0
22.0
23.0
22.0
22.5
23.0
A6B6C6
26.0
26.5
26.0
26.5
26.5
26.0
26.0
26.5
26.5
26.0
26.0
26.0
26.0
26.0
26.0
CÓDIGO
VÁLVULA
1
2
3
VOLUMEN EN mi
A7B7C7
32.0
31.5
32.0
31.5
32.0
32.0
32.0
32.0
32.0
32.0
32.0
32.0
32.0
32.0
32.0
A8B8C8
37.0
36.0
37.0
37.0
36.0
36.5
36.5
36.0
37.0
37.0
36.5
37.0
37.0
36.0
37.0
CÓDIGO
VÁLVULA
1
2
3
VOLUMEN EN mi
A9B9C9
42.0
42.0
42.0
42.0
41.5
42.0
42.0
41.5
42.0
41.5
42.0
42.0
42.0
42.0
41.5
A1B2C3
2.0
5.0
12.0
2.0
5.0
12.0
2.0
5.0
12.0
2.0
5.0
12.0
2.0
5.0
12.0
Sigue.

Continúa.
79
CÓDIGO
VÁLVULA
1
2
3
VOLUMEN EN mi
A2B3C4
7.5
10.0
17.5
7.5
10.0
18.0
7.5
10.0
17.5
7.5
10.0
17.5
7.5
10.0
18.0
A3B4C5
11.0
17,5
23.0
11.0
17.0
22.5
11.0
17.0
23.0
11.0
17,0
23.0
11.0
17.0
23.0
CÓDIGO
VÁLVULA
1
2
3
VOLUMEN EN mi
A4B5C6
18.0
22.0
26.0
18.0
22.0
26.0
18.0
22.5
26.5
18.5
22.5
26.5
18.0
22.0
26.0
A5B6C7
22.5
26.5
32.0
22.0
26.5
31.5
22.0
26.0
32.0
22.0
26.0
32.0
22.0
26.5
32.0
CÓDIGO
VÁLVUUX
1
2
3
VOLUMEN EN mi
A6B7C8
26.0
32.0
37.0
26.0
32.0
37.0
26.5
31.5
37.0
26.0
32.0
36.5
26.0
31.5
37.0
A7B8C9
32.0
36.0
42.0
32.0
35.5
42.0
31.5
36.0
42.0
32.0
36.0
42.0
32.0
36.0
41.5
CÓDIGO
VÁLVULA
1
2
3
VOLUMEN EN mi
A1BOCO
1.8
0.0
0.0
1.5
0.0
0.0
2.0
0.0
0.0
2.0
0.0
0.0
2.0
0.0
0.0
AOB1CO
0.0
1.0
0.0
0.0
1.0
0.0
0.0
0.5
0.0
0.0
0.5
0.0
0.0
0.5
0.0
Sigue.
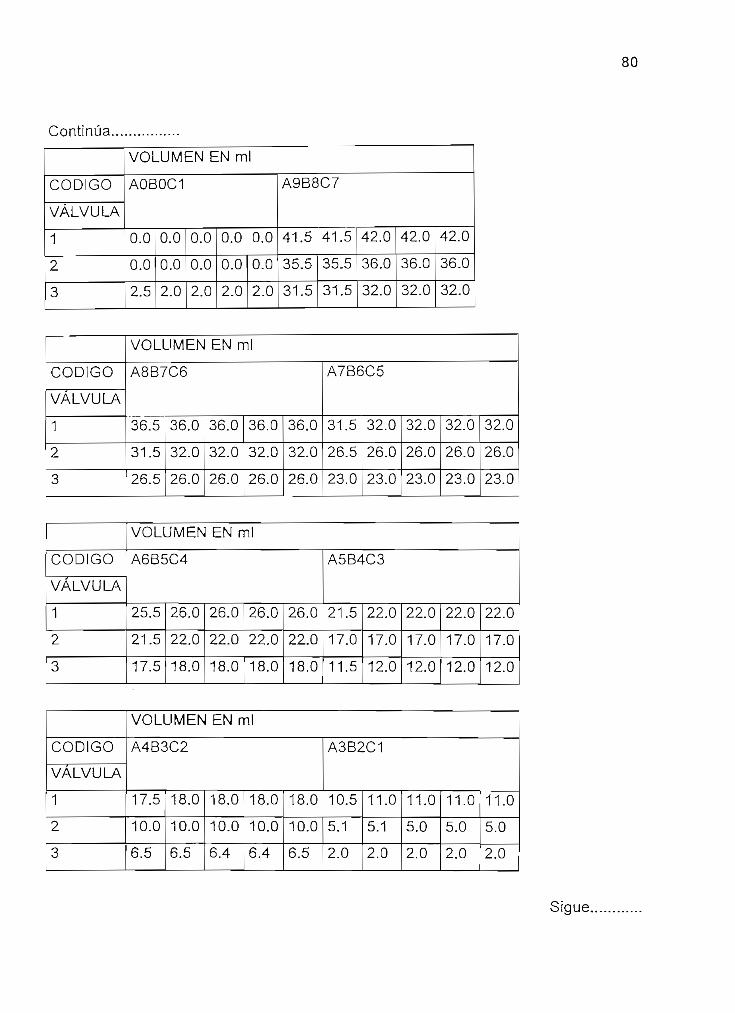
80
Continúa.
CÓDIGO
VÁLVULA
1
2
3
VOLUMEN EN mi
AOBOC1
0.0
0.0
2.5
0.0
0.0
2.0
0.0
0,0
2.0
0.0
0.0
2.0
0.0
0.0
2.0
A9B8C7
41.5
35.5
31.5
41.5
35.5
31.5
42.0
36.0
32.0
42.0
36.0
32.0
42.0
36.0
32.0
CÓDIGO
VÁLVULA
1
2
3
VOLUMEN EN mi
A8B7C6
36.5
31.5
26.5
36.0
32.0
26.0
36.0
32.0
26.0
36.0
32.0
26.0
36.0
32.0
26.0
A7B6C5
31.5
26.5
23.0
32.0
26.0
23.0
32.0
26.0
23.0
32.0
26.0
23.0
32.0
26.0
23.0
CÓDIGO
VÁLVULA
1
2
3
VOLUMEN EN mi
A6B5C4
25.5
21.5
17.5
26.0
22.0
18.0
26.0
22.0
18.0
26.0
22.0
18.0
26.0
22.0
18.0
A5B4C3
21.5
17.0
11.5
22.0
17.0
12.0
22.0
17.0
12.0
22.0
17.0
12.0
22.0
17.0
12.0
CÓDIGO
VÁLVULA
1
2
3
VOLUMEN EN mi
A4B3C2
17.5
10.0
6.5
18.0
10.0
6.5
18.0
10.0
6.4
18.0
10.0
6.4
18.0
10.0
6.5
A3B2C1
10.5
5.1
2.0
11.0
5.1
2.0
11.0
5.0
2.0
11.0
5.0
2.0
11.0
5.0
2.0
Sigue.

81
Continúa.
CÓDIGO
VÁLVULA
1
2
3
VOLUMEN EN mi
A2B1CO
7.4
0.5
0.0
7.5
0.5
0.0
7.5
0.5
0.0
7.5
0.5
0.0
7.5
0.5
0.0
A2B5C8
7.5
22.0
36.5
f.b
22.5
36.5
/.U
22.5
37.5
/.U
22.5
36.5
7.0
22.0
36.5
Tabla 4.1. Pruebas con agua sin colorante para determinar volúmenes,
4.2.2 PRUEBAS CON ANILINAS.
Con el objeto de dar coloración combinada con los tres colores propuestos ( amarillo,
azul y rojo), se pone en los cilinros anilinas como medios colorantes.
Se considera que esta prueba es conveniente realizarla con agua porque es un
medio de fácil mezclado, permietiendo de esta manera el obtener en corto tiempo los
colores esperados.
CÓDIGO
VÁLVULA
1
2
3
VOLUMEN EN mi
A1B1C1
2.0
0.5
2.0
2.0
1.0
2.0
2.0
0.5
2.0
2.0
0.5
2.0
2.2
0.5
2.0
A2B2C2
7.5
5.5
6.5
7.0
5.0
6.5
7.0
5.5
6.5
7.0
5.0
6.5
7.0
5.0
6.5
Sigue.
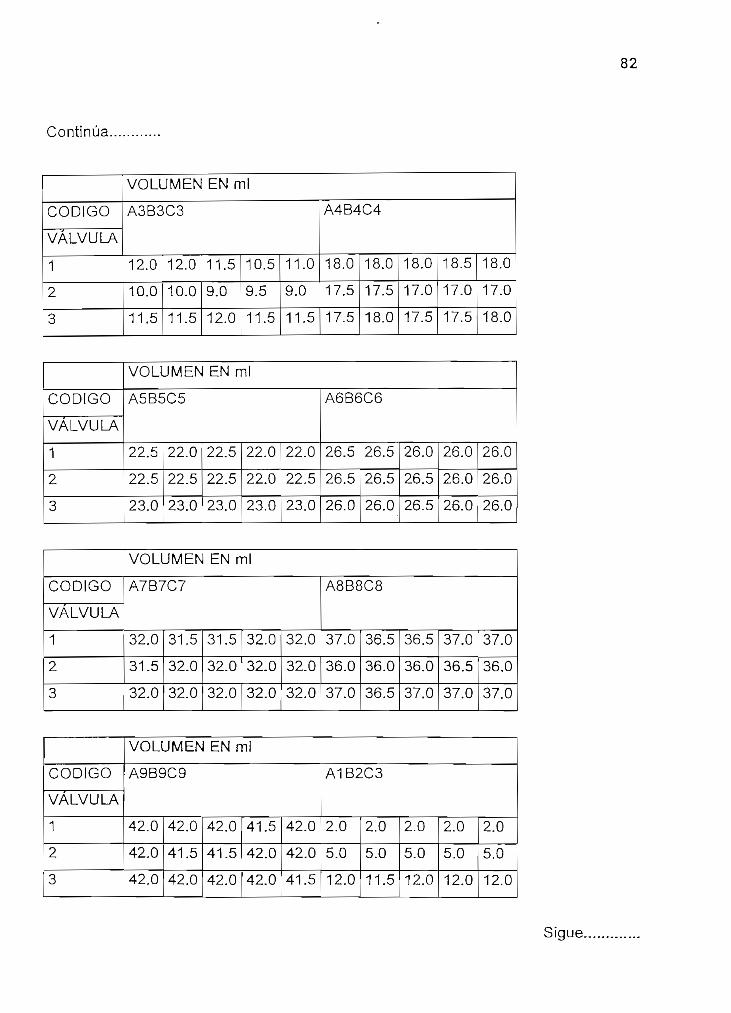
Continúa.
82
CÓDIGO
VÁLVULA
1
2
3
VOLUMEN EN mi
A3B3C3
12.0
10.0
11.5
12.0
10.0
11.5
11.5
9.0
12.0
10.5
9.5
11.5
11.0
9.0
11.5
A4B4C4
18,0
17.5
17.5
18.0
17.5
18.0
18.0
17.0
17.5
18.5
17.0
17.5
18.0
17.0
18.0
CÓDIGO
VÁLVULA
1
2
3
VOLUMEN EN mi
A5B5C5
22.5
22.5
23.0
22.0
22,5
23.0
22,5
22.5
23.0
22.0
22.0
23.0
22,0
22.5
23.0
A6B6C6
26.5
26.5
26.0
26.5
26.5
26.0
26.0
26.5
26.5
26.0
26.0
26.0
26.0
26.0
26.0
CÓDIGO
VÁLVULA
1
2
3
VOLUMEN EN mi
A7B7C7
32.0
31.5
32.0
31.5
32.0
32.0
31.5
32.0
32.0
32.0
32.0
32.0
32.0
32.0
32.0
A8B8C8
37.0
36.0
37.0
36.5
36.0
36.5
36.5
36.0
37.0
37.0
36.5
37.0
37.0
36.0
37.0
CÓDIGO
VÁLVULA
1
2
3
VOLUMEN EN mi
A9B9C9
42.0
42.0
42.0
42.0
41.5
42.0
42.0
41.5
42.0
41.5
42.0
42.0
42.0
42.0
41.5
A1B2C3
2.0
5.0
12.0
2.0
5.0
11.5
2.0
5.0
12.0
2.0
5.0
12.0
2.0
5.0
12.0
Sigue.
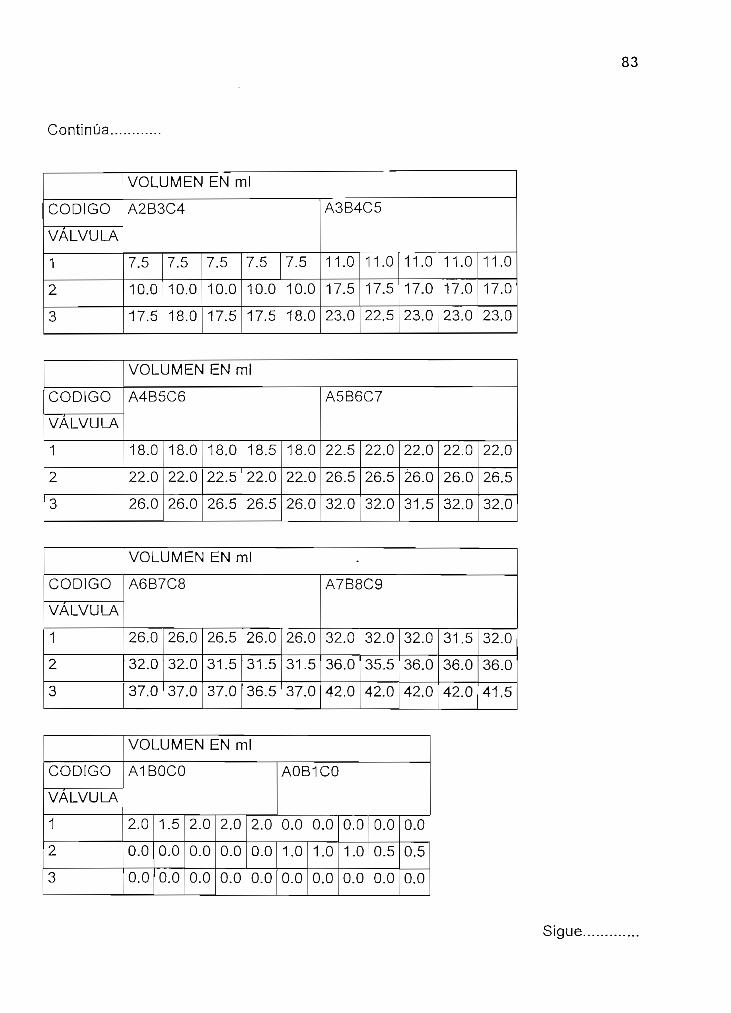
Continúa,
83
CÓDIGO
VÁLVULA
1
2
3
VOLUMEN EN mi
A2B3C4
7.5
10.0
17.5
7.5
10.0
18.0
7.5
10.0
17.5
7.5
10.0
17.5
7.5
10.0
18.0
A3B4C5
11.0
17.5
23.0
11.0
17.5
22.5
11.0
17.0
23.0
11.0
17.0
23.0
11.0
17.0
23.0
CÓDIGO
VÁLVULA
1
2
3
VOLUMEN EN mi
A4B5C6
18.0
22.0
26.0
18.0
22.0
26.0
18.0
22.5
26.5
18.5
22.0
26.5
18.0
22.0
26.0
A5B6C7
22.5
26.5
32.0
22.0
26.5
32.0
22.0
26.0
31.5
22.0
26.0
32.0
22.0
26.5
32.0
CÓDIGO
VÁLVULA
1
2
3
VOLUMEN EN mi
A6B7C8
26.0
32.0
37.0
26.0
32.0
37.0
26.5
31.5
37.0
26.0
31.5
36.5
26.0
31.5
37.0
A7B8C9
32.0
36.0
42.0
32.0
35.5
42.0
32.0
36.0
42.0
31.5
36.0
42.0
32.0
36.0
41.5
CÓDIGO
VÁLVULA
1
2
3
VOLUMEN EN mi
A1BOCO
2.0
0.0
0.0
1.5
0.0
0.0
2.0
0.0
0.0
2.0
0.0
0.0
2.0
0.0
0.0
AOB1CO
0.0
1.0
0.0
0.0
1.0
0.0
0.0
1.0
0.0
0.0
0.5
0.0
0.0
0.5
0.0
Sigue.
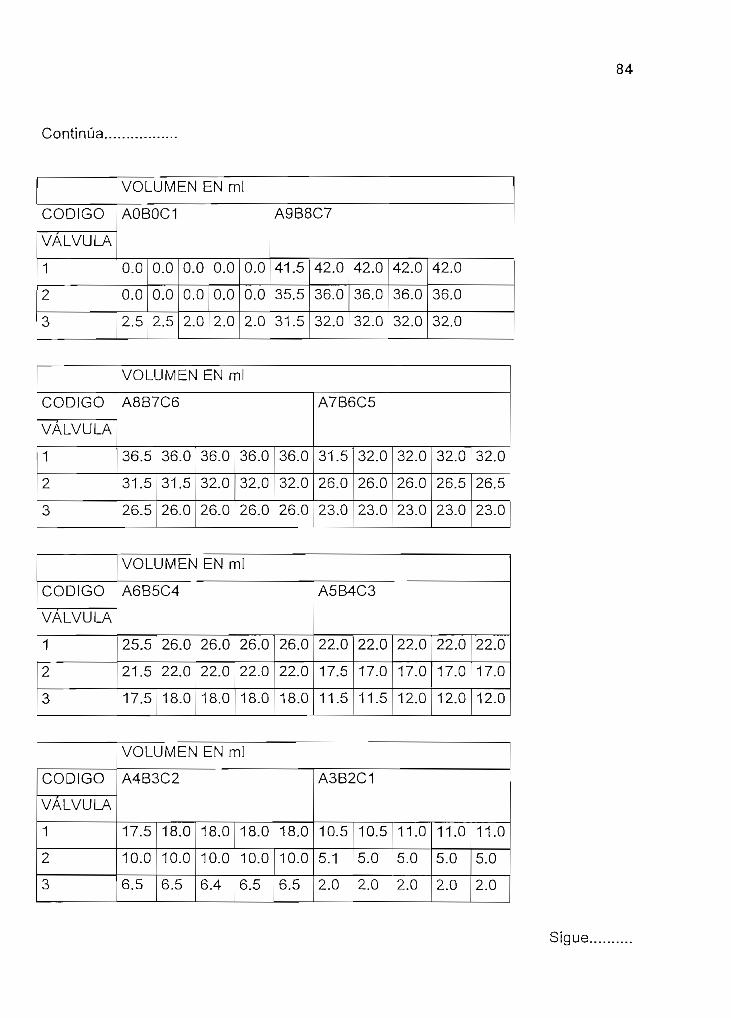
Continúa.
84
CÓDIGO
VÁLVULA
1
2
3
VOLUMEN EN mi
AOBOC1
0.0
0.0
2.5
0.0
0.0
2.5
0.0
0.0
2.0
0.0
0.0
2.0
0.0
0.0
2.0
A9B8C7
41.5
35.5
31.5
42.0
36.0
32.0
42.0
36.0
32.0
42.0
36.0
32.0
42.0
36.0
32.0
CÓDIGO
VÁLVULA
1
2
3
VOLUMEN EN mi
A8B7C6
36.5
31.5
26.5
36.0
31.5
26.0
36.0
32.0
26.0
36.0
32.0
26.0
36.0
32.0
26.0
A7B6C5
31.5
26.0
23.0
32.0
26.0
23.0
32.0
26.0
23.0
32.0
26.5
23.0
32.0
26.5
23.0
CÓDIGO
VÁLVULA
1
2
3
VOLUMEN EN mi
A6B5C4
25.5
21.5
17.5
26.0
22.0
18.0
26.0
22.0
18.0
26.0
22.0
18.0
26.0
22.0
18.0
A5B4C3
22.0
17.5
11.5
22.0
17.0
11.5
22.0
17.0
12.0
22.0
17.0
12.0
22,0
17.0
12.0
CÓDIGO
VÁLVULA
1
2
3
VOLUMEN EN mi
A4B3C2
17.5
10.0
6.5
18.0
10.0
6.5
18.0
10.0
6.4
18.0
10.0
6.5
18.0
10.0
6.5
A3B2C1
10.5
5.1
2,0
10.5
5.0
2.0
11.0
5.0
2.0
11.0
5.0
2.0
11.0
5.0
2.0
Sigue.

Continúa,
CÓDIGO
VÁLVULA
1
2
3
VOLUMEN EN mi
A2B1CO
7.4
0.5
0.0
7.5
0.5
0.0
7.5
0.5
0.0
7.5
0.5
0.0
7.5
0.5
0.0
A2B5C8
7.5
22.5
36.5
7.5
22.0
36.5
7.0
22.5
36.5
7.0
22.5
36.5
7.0
22.0
36.5
Tabla 4.2. Pruebas con anilinas para identificar matices
85
4.2.3 PRUEBAS CON PINTURA
Una vez efectudas las pruebas volumétricas y de coloración en los casos anteriores
con éxito se procede a realizar las pruebas con las pinturas de caucho comerciales,
esto, permite observar que el prototipo puede trabajar correctamente con el cambio
de densidad del liquido propuesto como objetivo.
CÓDIGO
VÁLVULA
1
2
3
VOLUMEN EN mi
A1B1C1
2.0
1.0
2.0
2.0
1.0
2.0
2.0
0.5
2.0
2.0
0.5
2.0
2.2
0.4
2.5
A2B2C2
7,5
5.5
6.5
7.5
5.5
6.5
7.0
5.5
6.5
7.0
5.0
6.0
7.0
5.0
6.0
CÓDIGO
VÁLVULA
1
2
3
VOLUMEN EN mi
A3B3C3
12.0
10.0
12.0
12.0
9.0
12.0
11.5
9.0
12.0
10.5
9.5
11.5
11.0
9.0
11.5
A4B4C4
18.0
17.5
18.0
18.0
17.0
18.0
18.0
17.0
18.0
18.5
17.0
17.5
18.0
17.0
17.0
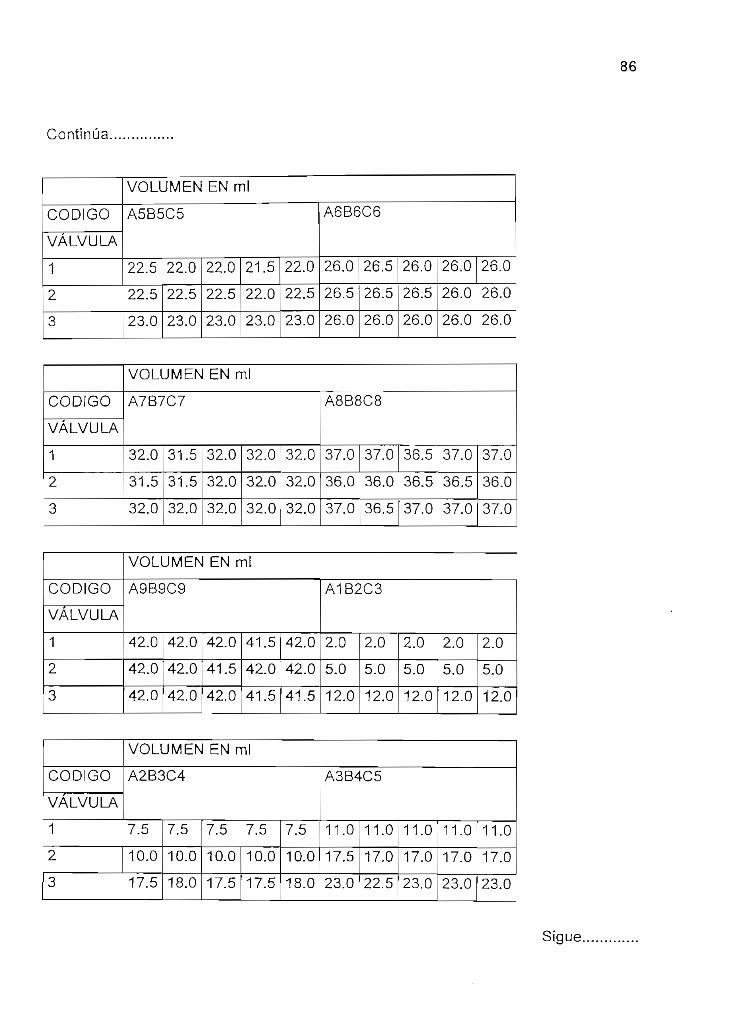
Continúa.
86
CÓDIGO
VÁLVULA
1
2
3
VOLUMEN EN mi
A5B5C5
22.5
22.5
23.0
22.0
22.5
23.0
22.0
22.5
23.0
21.5
22.0
23.0
22.0
22.5
23.0
A6B6C6
26.0
26.5
26.0
26.5
26.5
26.0
26.0
26.5
26.0
26.0
26.0
26.0
26.0
26.0
26.0
CÓDIGO
VÁLVULA
1
2
3
VOLUMEN EN mi
A7B7C7
32.0
31.5
32.0
31.5
31.5
32.0
32.0
32.0
32.0
32.0
32.0
32.0
32.0
32.0
32.0
A8B8C8
37.0
36.0
37.0
37.0
36.0
36.5
36.5
36.5
37.0
37.0
36.5
37.0
37.0
36.0
37.0
CÓDIGO
VÁLVULA
1
2
3
VOLUMEN EN mi
A9B9C9
42.0
42.0
42.0
42.0
42.0
42.0
42.0
41.5
42.0
41.5
42.0
41.5
42.0
42.0
41.5
A1B2C3
2.0
5.0
12.0
2.0
5.0
12.0
2.0
5.0
12.0
2.0
5.0
12.0
2.0
5.0
12.0
CÓDIGO
VÁLVULA
1
2
3
VOLUMEN EN mi
A2B3C4
7.5
10.0
17.5
7.5
10.0
18.0
7.5
10.0
17.5
7.5
10.0
17.5
7.5
10.0
18.0
A3B4C5
11.0
17.5
23.0
11.0
17.0
22.5
11.0
17.0
23.0
11.0
17.0
23.0
11.0
17.0
23.0
Sigue.

Continúa.
87
CÓDIGO
VÁLVULA
1
2
3
VOLUMEN EN mi
A4B5C6
18.0
22.0
26.0
18.0
22.0
26.0
18.0
22.5
26.5
18.5
22.5
26.5
18.0
22.0
26.0
A5B6C7
22.5
26.5
32.0
22.0
26.5
31.5
22.0
26.0
32.0
22.0
26.0
32.0
22.0
26.5
32.0
CÓDIGO
VÁLVULA
1
2
3
VOLUMEN EN mi
A6B7C8
26.0
32.0
37.0
26.0
32.0
37.0
26.5
31.5
37.0
26.0
32.0
36.5
26.0
31.5
37.0
A7B8C9
32.0
36.0
42.0
32.0
35.5
42.0
31.5
36.0
42.0
32.0
36.0
42.0
32.0
36.0
41.5
CÓDIGO
VÁLVULA
1
2
3
VOLUMEN EN mi
A1BOCO
1.8
0.0
0.0
1.5
0.0
0.0
2.0
0.0
0.0
2.0
0.0
0.0
2.0
0.0
0.0
AOB1CO
0.0
1.0
0.0
0.0
1.0
0.0
0.0
0.5
0.0
0.0
0.5
0.0
0.0
0.5
0.0
CÓDIGO
VÁLVULA
1
2
3
VOLUMEN EN mi
AOBOC1
0.0
0.0
2.5
0.0
0.0
2.0
0.0
0.0
2.0
0.0
0.0
2.0
0.0
0.0
2.0
A9B8C7
41.5
35.5
31.5
41.5
35.5
31.5
42.0
36.0
32.0
42.0
36.0
32.0
42.0
36.0
32.0
Sigue.

88
Continúa.
CÓDIGO
VÁLVULA
1
2
3
VOLUMEN EN mi
A8B7C6
36.5
31.5
26.5
36.0
32.0
26.0
36.0
32.0
26.0
36.0
32.0
26.0
36.0
32.0
26.0
A7B6C5
31.5
26.5
23.0
32.0
26.0
23.0
32.0
26.0
23.0
32.0
26.0
23.0
32.0
26.0
23.0
CÓDIGO
VÁLVULA
1
2
3
VOLUMEN EN mi
A6B5C4
25.5
21.5
17.5
26.0
22.0
18.0
26.0
22.0
18.0
26.0
22.0
18.0
26.0
22.0
18.0
A5B4C3
21.5
17.0
11.5
22.0
17.0
12.0
22.0
17.0
12.0
22.0
17.0
12.0
22.0
17.0
12.0
CÓDIGO
VÁLVULA
1
2
3
VOLUMEN EN mi
A4B3C2
17.5
10.0
6.5
18.0
10.0
6.5
18.0
10.0
6.4
18.0
10.0
6.4
18.0
10.0
6.5
A3B2C1
10.5
5.1
2.0
11.0
5.1
2.0
11.0
5.0
2.0
11.0
5.0
2.0
11.0
5.0
2.0
CÓDIGO
VALVUU\
2
3
VOLUMEN EN mi
A2B1CO
7.4
0.5
0.0
7.5
0.5
0.0
7.5
0.5
0.0
7.5
0.5
0.0
7.5
0.5
0.0
A2B5C8
7.5
22.0
36.5
7.5
22.5
36.5
7.0
22.5
37.5
7.0
22.5
36.5
7.0
22.0
36.5
Tabla 4.3. Pruebas con pinturas de caucho.

89
4.3 ANÁLISIS DE LOS RESULTADOS
Sobre la base de las tablas desarrolladas se presentan los siguientes errores:
Errores en pruebas con agua
- Errores en pruebas con anilinas
Errores en pruebas con pintura
43.1 ERRORES PRESENTADOS EN PRUEBAS CON AGUA.
De las tablas se puede determinar el error de cada código básico por lo que se
puede establecer el valor más probable y sobre la base de este establecer su
comportamiento; empleando las siguiente fórmulas.
X = I (Xi) / n
A1
A2
A3
A4
A5
A6
A7
A8
A9
Cl
2,01 ±0.103
7.33 ±0.254
11.13+0.399
18.04±0.176
22,07+0.176
26.07+0.176
31.93+0.176
36.98+0.129
41.97+0.129
1,99 +0,026
'(X-X¡)2/
Bl
B2. =
B3
B4
B5
B6
B7
B8
B9
(n-D
0.56 ±0.108
5.09 ±0.173
9.77 ±0.417
17.07+0.176
22.20+0.254
26.21+0.253
31.90+0.207
36.00+0.189
41.97+0.129

90
C2
C3
C4
C5
C6
C7
C8
C9
6.49 ±0.070
11.87+0.229
17.73+0.319
22.97 + 0.129
26.1 +0.207
31.96+0.129
36.93 + 0.178
41.93+0.176
4.3.2 ERRORES PRESENTADOS EN PRUEBAS CON ANILINAS.
A1
A2
A3
A4
A5
A6
A7
A8
A9
C1
C2
C3
C4
C5
C6
C7
C8
C9
2.01 +0.103
7.33 +0.254
11.13+0.399
18.04+0.176
22.07+0.176
26.07+0.176
31.93+0.176
36.98+0.129
41.97+0.129
1.99 +0.026
6.49 +0.070
11.87+0.229
17.73+0.319
22.97 ±0.129
26.1 ±0.207
31.96+0.129
36.93 ±0.178
41.93+0.176
B1
B2
B3
B4
B5
B6
B7
B8
B9
0.56 ±0.108
5.09 ±0.173
9.77 ±0.417
17.07+ 0.176
22.20+0.254
26.21+ 0.253
31.90+0.207
36.00± 0.189
41.97+0.129
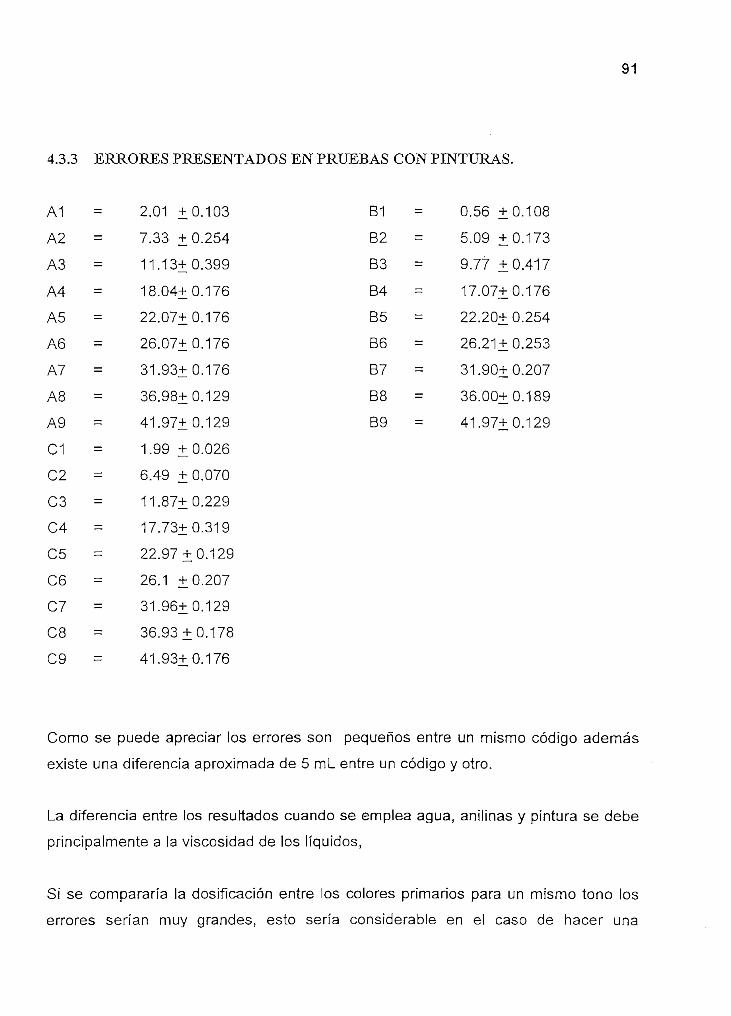
4.3.3 ERRORES PRESENTADOS EN PRUEBAS CON PINTURAS.
91
A1
A2
A3
A4
A5
A6
A7
A8
A9
C1
C2
C3
C4
C5
CG
C7
C8
C9
2.01 +0.103
7.33 ±0.254
11.13+0.399
18.04+0.176
22.07+0.176
26.07+0.176
31.93+0.176
36.98+0.129
41.97+0.129
1.99 ±0.026
6.49 ±0.070
11.87+0.229
17.73+0.319
22.97 ±0.129
26.1 ±0.207
31.96+0.129
36.93 + 0.178
41.93+0.176
B1
B2
B3
B4
85
B6
B7
B8
B9
0.56 ±0.108
5.09 ±0.173
9.77 ±0.417
17.07+ 0.176
22.20± 0.254
26.21+ 0.253
31.90+0.207
36.00± 0.189
41.97+0.129
Como se puede apreciar los errores son pequeños entre un mismo código además
existe una diferencia aproximada de 5 ml_ entre un código y otro.
La diferencia entre los resultados cuando se emplea agua, anilinas y pintura se debe
principalmente a la viscosidad de los líquidos,
Sí se compararía la dosificación entre los colores primarios para un mismo tono los
errores serían muy grandes, esto sería considerable en el caso de hacer una
92
dosificación con un pantón preestablecido lo cual no es el caso ya que, el pantón fue
hecho en base a lo que cada cilindro de succión-expulsión entregaba.
4.4 ANÁLISIS TÉCNICO.
De los errores calculados se puede establecer que el prototipo realiza una
dosificación aceptable, tomando en cuenta que la base blanca es de 1 litro y la
proporción es en ml_, con lo que se logra una gama muy amplia de colores, los
mismos que se pueden ampliar modificando en el programa el registro AUX3.
La cantidad de pintura con que se diferencia un código de otro es de 5 mi pero se
puede observar que el caso del código; A1B1C1 no se presenta este caso, este efecto
es a consecuencia de que para valores pequeños de succión de pintura , al inicio, se
debe vencer primero la inercia propia del émbolo para leventarlo lo que conlleva
tiempo por lo que el émbolo no alcance a absorver los primeros 5 mi de pintura.
De lo anterior se puede decir que para condiciones óptimas de manejo de la máquina
dosificadora se aconseja al operador empezar el desarrollo de los colores por el
código: A3B3C3.
El error que se presenta es en parte a que la mesa sobre la cual están los cilindros,
al ser de acrílíco al absorberse y expulsarse la pintura esta tiende a flejar, y por otro
lado a la viscosidad de la pintura que hace que el brazo realice un mayor esfuerzo el
momento de la succión y expulsión-
Es un prototipo de bajo costo tomando en cuenta el precio de equipos similares
existentes en el mercado.
El prototipo es de bajo peso, debido a que su estructura es de aluminio, la misma
que esta fija a la caja principal.

93
Los sensores (finales de carrera) permiten conocer el estado de la máquina cuando
se produce algún defecto en los motores y al bloquear todo permite que se puedan
revisar los mismos sin otra preocupación que no sea la de repara el motor afectado.
Toda la circuiíería esta protegida de posibles accidentes al encontrarse dentro de
cajas de acrílico, y canaletas.
Por lo antes expuesto y con los resultados entregados se puede afirmar que el
prototipo cumple con lo siguiente;
- Una buena dosificación.
Manejo adecuado de pintura de caucho.
- Posibilidad de ampliación del prototipo (realización del programa en subrutinas
fáciles de entender y manejar).
Estructura firme y robusta.
Fácil manejo (al ser únicamente un teclado matricíal de 16 teclas).
Protección contra códigos que no se encuentran en el pantón (si no se ingresa
correctamente el código el programa no lo toma en cuenta).
Prototipo de bajo costo y con elementos que se pueden adquirir fácilmente.
El tiempo de la dosificación es variable pues depende del código que se ingresa y
mientras mayor sea este más se demorara, es así que se determinó un tiempo de 3
minutos para los códigos de menor . valor por ejemplo AOB1CO y un tiempo de 40
minutos para el código de mayor valor A9B9C9, cabe indicar que sí luego de realizar
una dosificación se procede a realizar sobre esta una segunda, se logra los códigos
indicados como A12B10C8 (A9B5C4 + A3B5C4 o A8B4C8 + A4B4CO) amplíándose
enormemente la gama de colores.

94
4.5 CONCLUSIONES Y RECOMENDACIONES
CONCLUSIONES:
• E! error obtenido es muy pequeño debido al empleo de un motor de pasos en
el movimiento del brazo.
• El error fue producido por la falta de rigidez de la mesa de rotación y por la
viscosidad de la pintura.
• El prototipo esta enfocado a obtener una buena dosificación sacrificándose el
tiempo de ejecución.
• Se comprobó la importancia de utilizar materiales rígidos.
Recomendaciones:
• El prototipo se lo debe manipular con cuidado para evitar daños.
• Cuando ei prototipo indique mediante el LCD la falta de algún color queda a
completa responsabilidad del operador algún daño en la máquina producto de
ignorar este anuncio, inclusive el programa esta realizado de tal manera que
realiza el mismo anuncio aunque ya se haya corregido esta falta, como
medida extra de seguridad.
• Siempre se debe colocar la misma marca de pintura y no mezclar marcas
caso contrarío no se garantiza que las tonalidades sean las presentadas en eí
pantón.
• La máquina ÚNICAMENTE maneja pinturas de caucho.

95
• Cada cierto tiempo se deben lavar los cilindros para las pinturas, mangueras y
válvulas, estas últimas con mayor frecuencia debido a que el buen
funcionamiento depende en gran medida a que estén en buen estado.
• Antes de manejar el prototipo se deben leer cuidadosamente los manuales
par^ "no realizar operaciones que puedan dañar a la máquina.
• Si se desea modificar el programa para una futura ampliación, en lo posible no
se deben modificar |o£ tiempos empleado para presentar textos y la iniciación
del LCD, para no.tener problemas con los mensajes.i •
• L^ Dosificación se la realiza sobre una base blanca si la cantidad de esta base
cambia los resultados serán diferentes a los esperados, por lo que en lo
posible siempre esta base debe ser de 1 Litro.
• Los cilindros deben estar LIMPIOS para evitar que partículas de polvo impidan
el correcto funcionamiento de las válvulas.
• En caso de daño del prototipo solo personal capacitado puede realizar el
mantenimiento, eí mismo que se lo hace luego de desenergizar al prototipo.
• Realizar más pruebas con pinturas de caucho para establecer si el prototipo
sigue comportándose como lo ha hecho
• Las correcíones que se hagan para disminuir los errores presentes en el
protototipo deben estar seguidas de pruebas con pintura de caucho para de
esa manera establecer si el cambio en la coloración de la mezclas es
significativo.

96
CAPITULO 5
MANUALES PARA EL USUARIO DE LA MÁQUINA
YANEXOS

97
5.1 MANUAL DE INSTRUCCIONES DE MANEJO PARA LA
MÁQUINA DE DOSIFICACIÓN
TIPO:
BMPP-1

98
ÍNDICE
1 Advertencia
2 Instrucciones de seguridad.
2.1 Requisitos para una correcta colocación.
3 Manejo.
3.1 Breve esquema general y función de los elementos de manejo.
3.2 Arranque de la máquina.
3.2.1 Preparación para el uso de la máquina por primera vez y
después de un stop de la máquina.
3.2.2 Preparación de la máquina para su uso durante el día.
3.3 Pasos a seguir para realizar un color
4 Mantenimiento
4.1 mantenimeinto a realizar personalmente

99
1 ADVERTENCIA
Antes de instalar y usar el equipo, lea con atención ef manual deinstrucciones. De esa manera Ud. Aumentará su seguridad y evitarádaños innecesarios a la máquina.
CAUTIDNRISK DF ELECTRIC SHDCK
DD NGT DPEN
'PRECAUCIÓN: PARA REDUCIR EL RIESGO DE QUE SEPRODUZCAN SACUDIDAS ELÉCTRICAS, NO QUITE LA
CUBIERTA EXTERIOR.EN EL INTERIOR NO HAY PIEZAS QUE DEBA
REPARAR EL USUARIO.SOLICITE LAS REPARACIONES AL PERSONAL DE
SERVICIO CAPACITADO".
EXPLICACIÓN DE LOS SÍMBOLOS GRÁFICOS:
EL SÍMBOLO DEL RAYO CON PUNTA DE FLECHA, EN EL INTERIORDE UN TRIANGULO EQUILÁTERO, TIENE LA FINALIDAD DE AVISARAL USUARIO DE LA PRESENCIA DE "TENSIONES PELIGROSAS" SINAISLAR EN EL INTERIOR DEL PRODUCTO QUE PUDRÍAN SER DESIFICIENTE MAGNITUD COMO PARA CONSTITUIR UN RIESGO DESACUDIDA ELÉCTRICA PARA LAS PERSONAS.
EL SIGNO DE EXCLAMACIÓN EN EL INTERIOR DE UN TRIANGULOEQUILÁTERO TIENE LA FINALIDAD DE AVISAR AL USUARIO DELA PRESENCIA DE INSTRUCCIONES DE DPERACIDN YMANTENIMIENTO (REPARACIÓN) EN EL MATERIAL IMPRESO QUEACOMPAÑA AL APARATO.
100
2 Instrucciones de seguridad
Conecte la máquina exclusivamente a uno de los enchufes de pared con toma
de tierra y a 120V / 60Hz instalado según las prescripciones.
El usuario debe cuidar que la máquina se mantenga en buen estado y limpia.
Para evitar lesiones corporales las puertas tienen que estar cerradas.
Guarde las llaves de la máquina en un sitio fijo y seguro.
Las actividades de reparación o mantenimiento que no sean los trabajos
rutinarios solo deben ser llevadas a cabo por técnicos especializados.
El equipo sólo es apropiado para dosificar con pintura de caucho sobre una
base blanca.
Inspeccione las válvulas por si gotean, si este fuera el caso suspenda la
operación de la máquina y comuniqúese con el servicio técnico.

101
2 Colocación / Instalación de la máquina
2.1. Requisitos para una correcta colocación.
Compruebe que al colocar la máquina se cumplen los siguientes requisitos:
• La superficie donde colocará la máquina debe ser horizontal, estable y
uniforme.
• Cualquier sitio seco y bien ventilado es apropiado. Preferiblemente, no ponga
la máquina al sol ni junto a un radiador o a cualquier otra fuente de calor, para
evitar que se sequen tas pinturas.
• Tenga cuidado de que pequeños objetos y líquidos entren en la unidad por las
aberturas de ventilación del circuito de control.
• Cuando ponga o monte la unidad en un soporte o carro de mano, ésta deberá
moverse con mucho cuidado. Las paradas repentinas, la fuerza excesiva y las
superficies irregulares pueden hacer que la unidad o el carro de mano se dé
vuelta o se caiga.
• Como medida de segundad, esta unidad está equipada con clavijas, las
cuales sólo pueden introducirse de una forma en una tomacorriente. Si resulta
difícil o imposible introducir una clavija en una toma de corriente, dé vuelta a la
clavija e inténtelo de nuevo. Si sigue sin poder insertar fácilmente la clavija en
la tomacorriente, póngase en contacto con un electricista calificado para que
- le modifique o remplace la toma. Para evitar anular la característica de
seguridad de la clavija, no la meta a la fuerza en una tomacorriente.
102
2 Colocación / Instalación de la máquina
Cuando desconecte el cable de alimentación, sujete la clavija y jale de ella. No
jale del propio cable.
No maneje nunca la clavija de alimentación con las manos mojadas porque
podría producirse un incendio o una sacudida eléctrica.
Para impedir descargas eléctricas, no utilice una clavija de aumentación con
un cable de extensión, receptáculo u otro tipo de toma, a menos que la clavija
polarizada pueda introducirse completamente sin dejar expuestas sus patitas.
Los cables de alimentación deberán colocarse de manera que no sean
doblados excesivamente, pellizcados o pisados. Tenga mucho cuidado con el
cable que va de la unidad a la toma de corriente.
El tomacorriente debe ser usado únicamente para la máquina.

103
3 Manejo
3.1. Breve esquema general y función de los elementos de manejo
1. Conmutador central (negro)
2. Teclado
3. Display
4. Fusible
Conexión / Desconexión de toda
la máquina.
Para dirigir el proceso.
Para seguir y coordinar ei proceso
Protección
Véase ia figura 1.
4 ) -+- O^ v^
DDDD*n a a DnanaDDDD
D <
^
rr^v±y
Figura 1. Componentes del tablero de control.
104
3 Manejo 7
3.2. Arranque de la máquina.
3.2.1. Preparación para el uso por primera vez. y después de un stop de la
máquina.
Considera el uso por primera vez cuando la máquina cumpla con los siguientes
requisitos:
Los cilindros no contengan pintura.
El interruptor principal esta en la posición <o>.
Abra las puertas de la máquina y saque de los accesorios el embudo. Coloque
la pintura base (amarillo, azul y rojo ) en cada uno de los cilindros, colocando
el embudo en cada uno de los orificios que se encuentran en la mesa de
batido hasta la marca de nivel máximo presente en los cilindros.
Nota: En cada uno de los cilindros contenedores de los colores
primarios viene especificados el color y su respectivo código para evitar
equivocaciones el momento de su llenado con los colores.
Ponga e! interruptor principal en la posición <l>.
Se aconseja que mantenga este interruptor en la posición <l> día y noche.
Esto es necesario para el modo de automantenimiento para evitar
topanamíentos en los ductos.

105
3 Manejo 8_
• Ahora puede colocar el código del color deseado, teniendo como guía el
pantón dado para esta máquina.
Nota: Se debe tener la precaución de volver a leer el código ingresado
antes de colocar el último número del código del coló rojo ejemplo
A1B1C6.
3.2.2 Preparación de la máquina para su uso durante el día
En este caso únicamente se debe colocar el código del color deseado, teniendo
como guía el pantón dado para esta máquina.
3.3. Pasos a seguir para realizar un color.
1. Asegúrece que el cable de alimentación de la máquina esté conectado a!
tomacorriente.
2. Verifique que la pintura en los cilindrso se encuentre en el nivel máximo.
3. Coloque el interruptor principal en la posición<l>.
4. Espere a que se muestre en el display la frase INGRESE CÓDIGO.
5. Lea el código de! color seleccionado del pantón, que se encuentra en la parte
inferior de cada color, ejemplo:
A1B1C1
106
3 Manejo
6. Digite el código del color leyéndolo de izquierda a derecha empezando con la
letra A. Se debe tener la precaución de volver a leer el código ingresado antes
de colocar el último número del código del coló rojo ejemplo A1B1C6.
7. Una vez ingresado el último número el prototipo comenzará con su
funcionamiento.
8. En caso de presentarse los siguientes mensajes:
- FALTA COLOR AMARILLO.
- FALTA COLOR AZUL
- FALTA COLOR ROJO.
Llene el cilindro que corresponda con pintura hasta el nivel máximo y presione
en e! teclado la tecla # hasta que aparezca en el display el código ingresado,
luego de esto se continúa con el numeral 7.
9. De presentarse los siguientes mensajes:
- FALLA MOTOR DE ROTACIÓN.
- FALLA MOTOR DE SUCCIÓN:
Es necesario que el operador se comunique con el servicio técnico.

107
4 Mantenimiento 10
4.1 Mantenimiento a efectuar personalmente
Diariamente:
• Controle que las boquillas no queden obstruidas.
• Verifique que el nivel de pintura en cada uno de los cilindros este lo más cerca
posible al nivel máximo.
Semanalmente:
• Retire la pintura acumulada en el envase para "MODO DE
AUTOMANTENIMIENTO".
• Inspeccione el contenido de los cilindros y rellénelos hasta el nivel máximo.
Mensualmente:
• Inspeccione las válvulas por si gotean.
108
5.2 MANUAL DE MANTENIMIENTO PARA LA MAQUINA DE
DOSIFICACIÓN
TIPO:
BMPP-1

109
ÍNDICE
1. SISTEMA DE ABSORCIÓN Y EXPULSIÓN.
2. DESM.ONTAJE DE LA MESA DE ROTACIÓN.
3. MANTENIMIENTO DE LOS CILINDROS.
3.1. CILINDROS CONTENEDORES DE LOS COLORES PRIMARIOS
3.2. CILINDROS DE SUCCIÓN-EXPULSIÓN.
4. COLOCACIÓN DE LA PINTURA EN LOS CILINDROS

110
1 SISTEMA DE ABSORCIÓN Y EXPULSIÓN
t
Es importante mantener engrasado el, tornillo sin fin se debe tener la precaución de
observar periódicamente si este se encuentra engrasado, de lo contrario se debe
colocar grasa liviana parafinada como se indica en la figura a.
Esta grasa se debe colocar en el paso del tornillo sin exceder los dientes.
Figura a. Engrasado del tornillo sin fin

111
2 DESMONTAJE DE LA MESA DE ROTACIÓN
Se debe realizar el siguiente procedimiento:
• Abrir las puertas de la parte posterior de la máquina.
• Bajar la parte móvil que sujeta a la mesa de rotación, ubicada en el pilar
externo frente al brazo de soporte principal, figura b.
r^
Figura b. Manipulación de la parte móvil del pilar externo.
Levantar el eje de la mesa de rotación que se une al eje de la caja de
aumento de torque, como se observa en la figura c..

112
2 DESMONTAJE DE LA MESA DE ROTACIÓN
Figura c. Manera de levantar el eje de la mesa rotación
Sacar con cuidado la mesa de rotación de su ubicación.
Sacar la mesa de batido que sujeta las aspas de mezclado para lo cual se
aflojan los tornillos ubicados en la parte superior de la mesa, figura d.
Figura d. Desmontaje de la mesa de batido
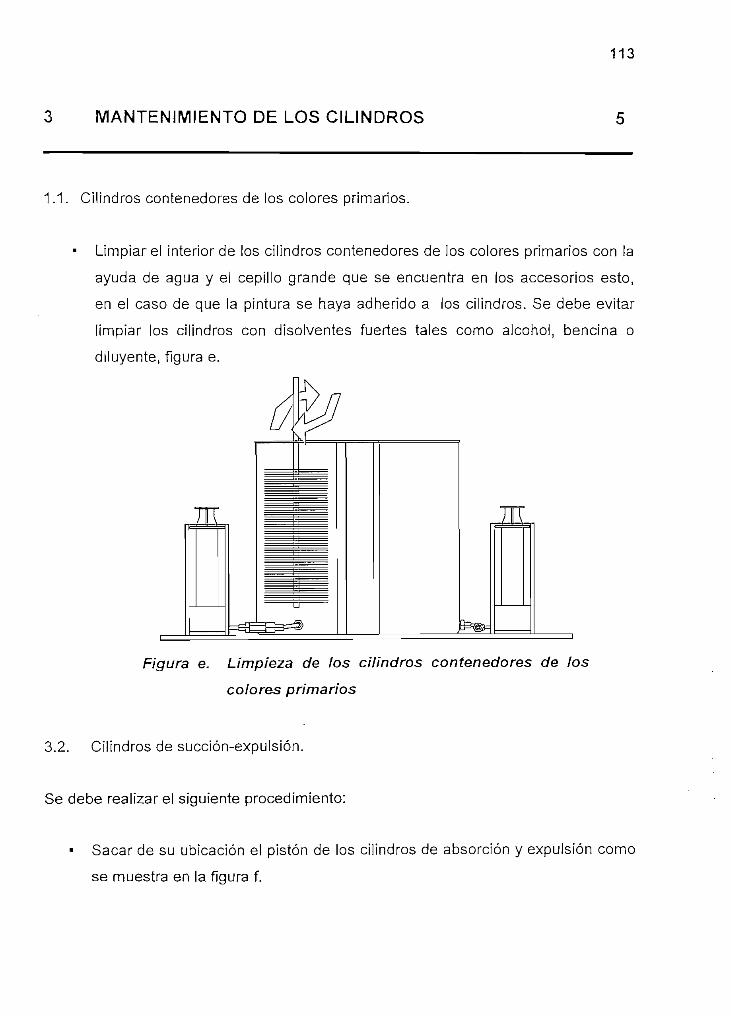
113
MANTENIMIENTO DE LOS CILINDROS
1.1. Cilindros contenedores de los colores primarios.
• Limpiar el interior de los cilindros contenedores de los colores primarios con la
ayuda de agua y el cepillo grande que se encuentra en los accesorios esto,
en el caso de que la pintura se haya adherido a los cilindros. Se debe evitar
limpiar los cilindros con disolventes fuertes tales como alcohol, bencina o
diluyente, figura e.
Figura e. Limpieza de los cilindros contenedores de los
colores primarios
3.2. Cilindros de succión-expulsión.
Se debe realizar el siguiente procedimiento:
• Sacar de su ubicación el pistón de los cilindros de absorción y expulsión como
se muestra en la figura f.

114
3 MANTENIMIENTO DE LOS CILINDROS
Figura f. Desmontaje de los pistones de los cilindros de
succíón-expulsíón.
Limpiar con un paño humedecido con agua el émbolo, teniendo la precaución
de no limpiar con disolventes fuertes tales como alcohol, bencina o diluyente
ya que estos pueden deteriorar al émbolo, figura g.

3 MANTENIMIENTO DE LOS CILINDROS
115
Énbolo
Figura g. Limpieza de los émbolos.
Limpiar con agua y el cepillo pequeño presente en los accesorios esto, en el
caso de que se haya adherido pintura a ios mismos, figura h.
Figura /?. Limpieza de los cilindros succión-expulsión.

116
3 MANTENIMIENTO DE LOS CILINDROS
Coloque cada uno de los pistones en sus respectivas posiciones con
cuidado evitando hacer demasiado esfuerzo contra la mesa ya que esto
podría romperla, como indica la figura i.
Figura i. Colocación de los pistones en sus respectivos cilindros.

117
4 COLOCACIÓN DE LA PINTURA EN LOS CILINDROS
- Se debe sacar de su ubicación a la mesa de batido y se procede a colocar con
la ayuda del embudo presente en los accesorios las pinturas en sus
respectivos cilindros, figura j.
Figura j. Colocación de los distintos colores.
Los colores primarios deben ser los mismos que los originalmente puestos
para de ésta manera garantizar la correspondencia con las tonalidades dadas
por el pantón por lo cual se presenta !a codificación de estos a continuación:

118
4 COLOCACIÓN DE LA PINTURA EN LOS CILINDROS 10
MARCA:
COLOR CODIFICACIÓN
AMARILLO
AZUL
ROJO

119
¡PROGRAMA DE MAQUINA DOSIFICADORA DE PINTURA.
LISTP^16F873INCLUDE<P16F873.INC>
;variables LCDCONT1 EQUCONT2EQUCONT3 EQUCONT6EQUCONT7EQUCONT9EQUAUXAUX2RO
20¡contador de espera para empezar la iniciación21 ¡variable de tiempo222324;número de variables a presentarse25EQU 26 ¡numero de variables a presentarse por filaEQU 27 ;nümero de variables a presentarse por filaEQU 28 ¡variable de tiempo
¡variables tecladoBANC01 EQU 29BANC02 EQU 2ABANCOS EQU 2BBANCO4 EQU 2CBANCOS EQU 2DBANCO6 EQU 2E ¡identificación de texto entre números y oracionesBANC07 EQU 2F
BANCOS EQU 30 ¡contador supertimeBANCO9 EQU 31 ¡contador supertimeCONT4EQU 32 ¡contador supertimeCONT5EQU 33
¡variables motoresCONT8EQU 34AUX3AUX4AUX5R1R2R3R4R5R6R7R8R9R21R24R25R26R12R14R15R16R17R18R19
EQU 35EQU 36 ¡tiempo de encendido de los motoresEQU 37 ¡identificación de texto 1EQU 38 ¡pasos del motor de succiónEQU 39 ¡verificación de letra correctaEQU 3A ¡verificación de tetra correctaEQU 3B ¡verificación de numeroEQU 3C ¡verificación de código bien ingresadoEQU 3D ¡cantidad de primer colorEQU 3E ;cantídad de segundo colorEQU 3F ¡cantidad de tercer colorEQU 40 ¡registro de paso para almacenar el colorEQU 41 ¡nivel recipienteEQU 42 ¡registro como se usa la pinturalEQU 43 ¡registro como se usa la pintura2EQU 44 ¡registro como se usa la pinturasEQU 45 ¡registro de resupertimeEQU 46 ¡contador dos de número dígitosEQU 47 ¡contador para funcionamiento automáticoEQU 48 ¡contador para funcionamiento automáticoEQU 49 ¡contador para funcionamiento automáticoEQU 4A ¡contador para funcionamiento automáticoEQU 4B ¡contador para funcionamiento automático
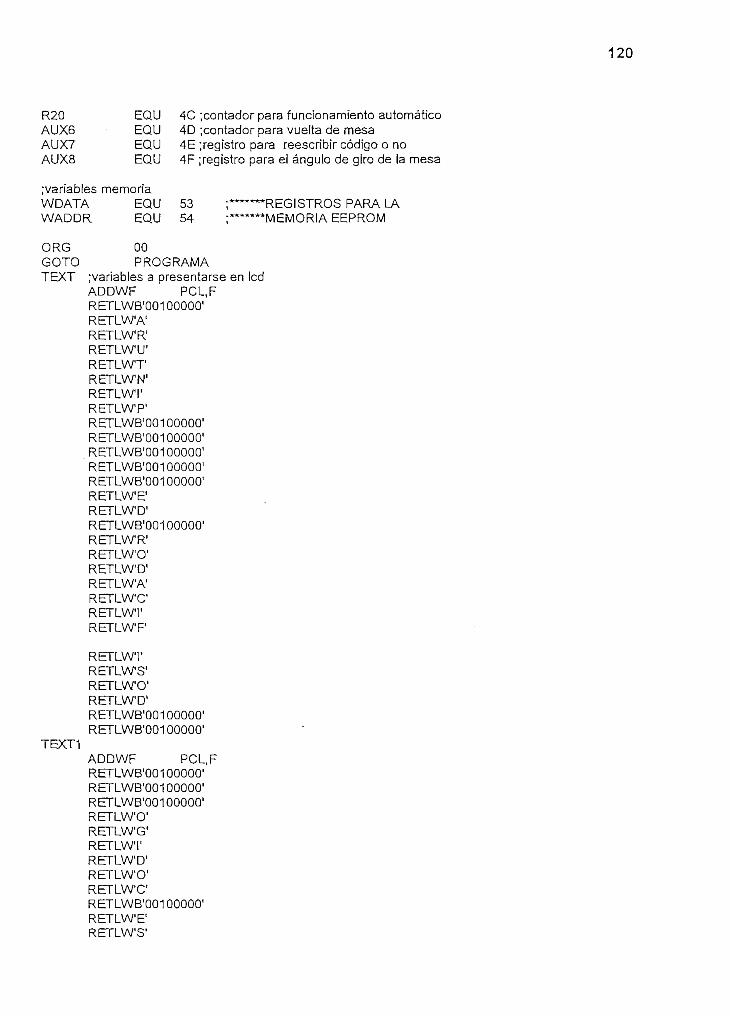
120
R20 EQU 4C ¡contador para funcionamiento automáticoAUX6 EQU 4D ¡contador para vuelta de mesaAUX7 EQU 4E ¡registro para reescribir código o noAUX8 EQU 4F ¡registro para el ángulo de giro de la mesa
¡variables memoriaWDATA EQU 53 ;*******REGISTROS PARA LAWADDR EQU 54 ;*******MEMORIA EEPROM
ORG 00GOTO PROGRAMATEXT ¡variables a presentarse en Icd
ADDWF PCL.FRETLWB'001000001
RETLW'A'RETLW'R'RETLW'U'RETLWTRETLW'N'RETLWTRETLW'P1
RETLWB'001000001
RETLWB'001000001
.RETLWB'00100000'RETLWB'001000001
RETLWB'001000001
RETLW'E1
RETLW'D1
RETLWB'00100000'RETLW'R'RETLW'O'RCTLW'D1
RETLW'A1
RETLW'C1
RETLWTRETLWF
RETLWTRETLW'S1
RETLW'O'RETLW'D1
RETLWB'OOl 00000'RETLWB'001000001
TEXT1ADDWF PCL.FRETLWB'00100000'RETLWB'00100000'RCTLWB'00100000'RETLW'O'RETLW'G1
RETLW'I'RETLW'D'RETLW'O1
RETLWC1
RETLWB'00100000'RETLW'E1
RETLW'S1

121
RETLW'E1
RETLW'R1
RETLW'G'RETLWN1
RETLWTRETLWB'OOIOOQOO'
TEXT2ADDWF PCL.FRETLWB'001000001
RETLWN1
RETLWO1
RETLWTRETLWC1
RETLWC1
RETLWU1
RETLW'S'RETLWB'00100000'
RETLWB'00100000'RETLWB'00100000'RETLWB'001000001
RETLWB'001000001
RETLW'E1
RETLWD1
RETLWB'00100000'RETLW'R1
RETLW'O1
RETLWTRETLW'O1
RETLWM1
RETLWB'001000001
RETLWA1
RETLWL1
RETLWL'RETLWA1
RETLWPRETLWB'00100000'
TEXT3ADDWF PCL.FRETLWB'00100000'RETLW'N1
RETLWO1
RETLW'l'RETLW'C1
RETLWA1
RETLWT1
RETLWO1
RETLW'R1
RETLWB'00100000'RETLWB'001000001
RETLWB'00100000'TEXT4
ADDWF PCL.FRETLWB'OOIOQOOO1
RETLWL1
RETLWA'RETLWN'

122
RETLW'O1
RETLWTRETLW'C'RETLW'A1
RETLW'N'RETLWB'001000001
RETLWB'00100000'RFTLWB'00100000'RETLWB'001000001
RETLW'A'RETLW'C1
RETLWTRETLW'N1
RETLW'C1
RETLW'E1
RETLW TRETLWTRETLWURETLW'O'RETLW'P'RETLW1.1RETLW'C'RETLW'S1
RETLW E'TEXT5
ADDWF PCL.FRETLWB'00100000'RETLW'S1
RETLWTRETLWU'RETLW'L1
RETLWB'001000001
RETLWZ1
RETLWTRETLW'L1
RETLWA1
RETLWP1
RETLWB'001000001
RETLWB'001 OOQOO1
RETLWB'001000001
RETLWB'001000001
RETLW'O'RETLW'I1RETLW'C'RETLW'i1RETLW'R1
RETLWT'RETLW'A1
RETLW'P1
RETLWB'OO 100000'RETLW'S1
RETLW'A1
RETLW'Y'RETLWA1
RETLW'B'RETLWB'00100000'
TEXTG
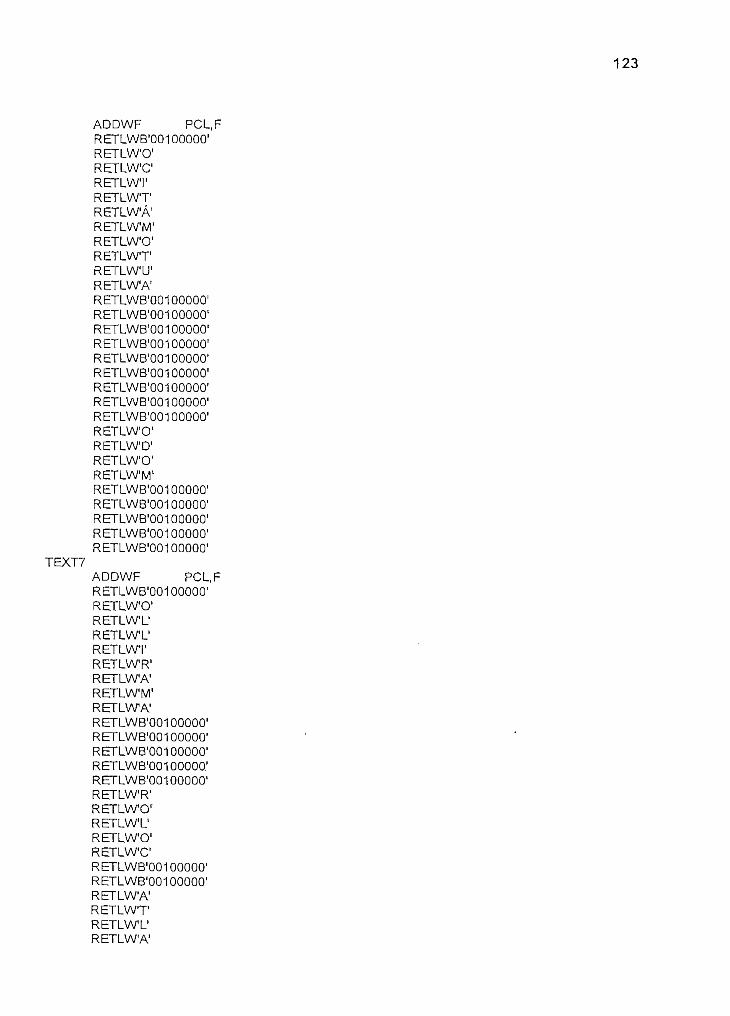
123
ADDWF PCL.FRETLWB'001000001
RETLW'O'RETLW'C'RETLW'I1RETLWT'RETLW'Á'RETLWM1
RETLW'O1
RETLWT'RETLW'U1
RETLW'Á'RETLWB'001000001
RETLWB'001 00000'RETLWB'001 00000'RETLWB'001 00000'RETLWB'00100000'RETLWB'001 00000'RETLWB'001 00000'RETLWB'00100000'RETLWB'00100000'RETLW'O'RETLWD'RETLW'O'RETLWM1
RETLWB'001 00000'RETLWB'001000001
RETLWB'00100000'RETLWB'001 00000'RETLWB'001000001
TEXT7ADDWF PCL.FRETLWB'00100000'RETLW'O1
RETLWURETLWURETLWTRETLWR'
RETLW'M1
RETLWB'001 00000'RETLWB'001 00000'REÍLWB'001 00000'RETLWB'00100000.'RETLWB'001000001
RETLWR1
RFTLWO'RETLWURETLW'O'RETLW'C'RETLWB'001 00000'RETLWB'001 00000'RETLW'A'RETLWTRETLW'URETLW'A1

124
RETLW'F1
RETLWB'00100000'RETLWB'001000001
RETLWB'00100000'TEXT8
ADDWF PCL.FRETLWB'00100000'RETLW'L'RETLW'U1
RETLW'Z'RETLW'A1
RETLWB'00100000'RETLWB'001000001
RETLWB'00100000'RETLWB'00100000'RETLWB'001000001
RETLWB'00100000'RETLWB'001000001
TEXT9ADDWF PCL.FRETLWB'001000001
RETLWO'RETLW'J1
RETLWO1
RETLW'R'RETLWB'00100000'RETLWB'00100000'RETLWB'00100000'RETLWB'001000001
RETLWB'001000001
RETLWB'001000001
RETLWB'00100000'PROGRAMA
BANKSEL OPTION_REGMOVLW B'11000111'MOVWF OPTION_REGBANKSEL PCON
MOVLW B'000000111
MONM/F PCONBANKSEL R2CLRF R2CLRF R3CLRF R4CLRF R5CLRF R6CLRF R7CLRF R8CLRF R9
LONGDELAYBANKSEL TRISBMOVLW B'000010011
MOVWF TRISB ;R80,RB3 entradas seguridad de motores lo restante salidasBANKSEL TRISO.MOVLW B'00111111'MOVWF TRISC; puerto c Isb entradas, RC4, RC5 topes motor de succíón,RC6 relé de
apagado

126
CALL PORTNIBBLE ;envio del segundo paqueteCALL SHORTDELAYBANKSEL PORTABCF PORTA,1CALL PULSOCALL SHORTDELAY
;preseníacíón del cursor en modo blink;en la primera localidadDISPLAYON2
BANKSEL PORTABCF PORTA.1CALL SHORTDELAYBANKSEL PORTABCF PORTA.1BANKSEL CONT3MOVLW OF ;comando para que el cursor este en modo blinkMOVWF CONT3CALL PORTNIBBLECALL SHORTDELAYBANKSEL PORTABCF PORTA, 1CALL PULSOCALL SHORTDELAYBANKSEL CONT3SWAPF CONT3.WCALL PORTNIBBLECALL SHORTDELAYBANKSEL PORTABCF PORTA.1CALL PULSOCALL SHORTDELAYCALL CLEARDISPLAYBANKSEL CONT7MOVLW D'271
MOVWF CONT7CLRF CONT9MOVLW 10 ;nümero de letras a presentarse en cada filaMOVWF AUX2MOVWF AUXCLRF AUX5CALL SHORTDELAYBANKSEL CONT5MOVLW OCMOVWF CONT5CALL LETRATCALL SUPERTIMECALL CLEARDISPLAYBANKSEL CONT7MOVLW D'291
MOVWF CONT7CLRF CONT9MOVLW 10 ;numero de letras a presentarse en cada filaMOVWF AUX2MOVWF AUXMOVLW OFFMOVWF AUX5CALL SHORTDELAY

127
BANKSEL CONT5MOVLW OCMOVWF CONT5CALL LETRATCALL SUPERTIMECALL CLEARDISPLAYBANKSEL CONT7MOVLW D'27' ;nümero de variables de la tablaMOVWF CONT7CLRF CONT9MOVLW 10 ;nümero de letras a presentarse en cada filaMOVWF AUX2MOVWF AUXCLRF AUX5CALL SHORTDELAYBANKSEL CONT5MOVLW OCMOVWF CONT5CALL LETRACALL SUPERTIMECALL CLEARDISPLAYBANKSEL CONT7MOVLW D'171
MOVWF CONT7CLRF CONT9MOVLW 10 ¡numero de letras a presentarse en cada filaMOVWF AUX2MOVWF AUXMOVLW OFFMOVWF AUX5CALL SHORTDELAYBANKSEL CONT5MOVLW OCMOVWF CONT5CALL LETRACALL SHORTDELAYBANKSEL BANCOSMOVLW OFFMOVWF BANCOSCLRF AUX5CALL SHORTDELAY
;instruccíones de tecladoPRUEBA
MOVLW D'161 ¡numero O cuido RA4CALL GUARDARBANKSEL PORTCBTFSC PQRTC.OGOTO NUM1BANKSEL PORTCBTFSC PORTC,1GOTO NUM4BANKSEL PORTCBTFSC PORTC.2GOTO NUM7BANKSEL PORTCBTFSC PORTC.3GOTO NÚMAS

130
NUM1
NUM4
NUM7
NÚ MAS
CLRF R4CLRF R5CLRF R14CLRF R6CLRF R7CLRF R8CLRF R9GOTO PRUEBA
CALL ORDEN1MOVLW B'001100011
CALL DÍGITOGOTO REGRESO1
CALL ORDEN1MOVLW B'00110100'CALL DÍGITOGOTO REGRESO1
CALL ORDEN1MOVLW B'001101111
CALL DÍGITOGOTO REGRESO1
CALL CLEARDISPLAYBANKSEL AUX5MOVLW OFFMOVWF AUX5CLRF BANCOSMOVLW D'171
MOVWF CONT7CALL LETRABANKSEL BANCOSMOVLW OFFMOVWF BANCOSCLRF AUX5CLRF BANCO7MOVLW D'6r
MOVWF R14GOTO REGRESO1
NUM2
NUM5
NUM8
NUMO
CALL ORDEN2MOVLW B'001101011
CALL DÍGITOGOTO REGRESO2
CALL ORDEN2MOVLW B'001110001
CALL DÍGITOGOTO REGRES02
CALL ORDEN2

131
NUM3
NUM6
NUM9
MOVLW B'001100001
CALL DÍGITOGOTO REGRESO2
CALL ORDEN3MOVLW B'00110011'CALL DÍGITOGOTO REGRESOS
CALL ORDEN3MOVLW B'00110110'CALL DÍGITOGOTO REGRESOS
CALL ORDEN3MOVLW B'oomoorCALL DÍGITOGOTO REGRESOS
NUMNU
NUMA
NUMB
GOTO REGRESOS
BANKSEL R5BTFSC R5,0GOTO REGRESO4BANKSEL R2BTFSC R2,0GOTO REGRESO4BTFSC R3,0GOTO REGRES04BTFSC R4.0GOTO REGRESO4MOVLW B'010000011
CALL DÍGITOBANKSEL R2MOVLW OFFMOVWF R2MOVWF R5GOTO REGRESO4
R9BANKSELMOVF R9.WMOVWFMOVLWANDWFBANKSELBTFSC R5.0G.QTO RE.GRESQ4BTFSS R2.0GOTO REGRESO4BTFSC R3.0GOTO REGRESO4MOVLW B'01000010CALL DÍGITOBANKSEL R2CLRF R2MOVLW OFFMOVWF R3
R6B'oooomrR6,F;aImaceno pnmercolorR5

132
MOVWF R5GOTO REGRESO4
NUMCR9BANKSEL
MOVF R9.WMOVWFMOVLWANDWFBTFSC R5.0GOTO REGRESO4BTFSC R2,0GOTO REGRES04BTFSS R3.0GOTO REGRESO4MOVLW B'01000011'CALL DÍGITOBANKSEL R2CLRF R2CLRF R3MOVLW OFFMOVWF R5GOTO REGRESO4
NUMDGOTO REGRESO4
¡escritura en IcdLETRA
CALL 51 LETRABANKSEL CONT7MOVF CONT7.WBTFSC AUX5.0GOTO PUENTE4GOTO PUENTES
PUENTE4CALL TEXT1GOTO PUENTE2
PUENTE3BANKSEL BANCOSBTFSC BANCO6.0GOTO PUENTE1CALL TEXTGOTO PUENTE2
PUENTE1BANKSEL BANCO3MOVF BANCO3.W
PUEN.TE2CALL S2LETRABANKSEL CONT9MOVF CONT9.WXORWF AUX.OBTFSC STATUS.ZGOTO SIBANKSEL CONT7DECFSZ CONT7GOTO LETRA1GOTO PATITO
LETRA1BANKSEL BANCO6
R7B'000011111
R7,F ¡almaceno segundo color

133
BTFSS BANC06.0GOTO LETRACALL SHORTDELAYRETLW O
SI;direccionam¡ento del cursor
CALL SETIGOTO LETRA
PATITOCALL PÁTICORETLWO
¡Textos de presentaciónLETRAT
CALL S1 LETRABANKSEL CONT7MOVF CONT7.WBTFSCAUX5.0GOTO APUENTE4GOTO APUENTE3
APUENTE4CALL TEXT5GOTO APUENTE2
APUENTE3CALL TEXT4GOTO APUENTE2
APUENTE2CALL S2LETRABANKSEL CONT9MOVF CONT9.WXORWF AUX.OBTFSC STATUS.ZGOTO ASIBANKSEL CONT7DECFSZ CONT7GOTO LETRATGOTO APATITO
ASICALL SETIGOTO LETRAT
APATITOCALL PÁTICORETLWO
;Limpío toda la pantalla del IcdCLEARDISPLAY
BANKSEL PORTA.BCF PORTA.1CALL SHORTDELAYBANKSEL PORTABCF PORTA.1BANKSEL CONT3MOVLW DT ;comando de borrado de pantallaMOVWF CONT3CALL SHORTDELAYBANKSEL PORTABCF PORTA.1CALL PORTNIBBLE ;envio del primer paqueteCALL SHORTDELAY

134
BANKSEL PORTABCF PORTA.1CALL PULSOCALL SHORTDELAYBANKSEL CONT3SWAPF CONT3.WCALL PORTNIBBLE ;env]o del segundo paqueteCALL SHORTDELAYBANKSEL PORTABCF PORTA.1CALL PULSOCALL SHORTDELAYBANKSEL CONT9CLRF CONT9BANKSEL AUX2MOVLW 10 ;nümero de letras a presentarse en cada filaMOVWF AUX2MOVWF AUXCLRF BANCO7MOVLW OCMOVWF CONT5RETLWO
;limpio la pantalla de numeras, prendo motoresBORRADITO
BANKSEL BANCO7INCF BANCO7MOVLW D'61 ;nümero de carateres del códigoXORWF BANCO7.0BTFSC STATUS.ZGOTO SIMOTORGOTO NOMOTOR
SIMOTORCALL CHEQUEOBANKSEL R9MOVF R9,WMOVWF R8MOVLW B'000011111
ANDWF R8,F ¡almaceno tercer colorCLRF AUX7CALL SUPERTIMECALL NIVELCALL SUPERTIMECALL NIVELCALL SUPERTIMEBTFSS AUX7.0GOTO BIENIVELCALL RECLAVE
BIENIVELBANKSEL PORTCBCF PORTC.7 ;enciendo motoresCALL SUPERTIMEBANKSEL PORTCBSF PORTC,6 ¡conecto fuente a motoresCALL SHORTDELAYBANKSEL R6MOVF R6.WMOVWF BANCO3

135
MOVLW D'96';primergiro de la mesaMOVWF AUX8CALL VELOCIDADCALL MOTORBANKSEL R12MOVLW D'30'MOVWF R12CALL RESUPERTIMECALL CHEQUEOBANKSELMOVF R7,WMOVWFMOVLWMOVWFCALLCALL
R7
BANCO3D'97';segundo giro de la mesaAUX8
VELOCIDADMOTOR
BANKSEL R12MOVLW D'301
MOVWF R12CALL RESUPERTIMECALL CHEQUEOBANKSEL R8M.OVF R8.WMOVWFMOVLWMOVWFCALLCALL
BANCOSD'99';tercerg¡ro de la mesaAUX8
VELOCIDADMOTOR
BANKSEL R12MOVLW D'301
MOVWF R12CALL RESUPERTIME ;tiempo para que se ubique el ultimo colorCALL CHEQUEOBANKSEL PORTOBSF PORTC, 7 ¡enciendo el motor de baíido.apago otros motoresCALL RESUPERTIMEBANKSEL PORTCBCF PORTC.6 Desconecto fuente a motoresCALL SUPERTIMEBANKSEL PORTCBCF PORTC.7 ;apago el motor de batidoCALL CLEARDISPLAYBANKSEL AUX5MOVLW OFFMOVWF AUX5CLRF BANCO6MOVLW D'17'MOVWF CONT7CALL LETRABANKSEL BANCO6MOVLW OFFMOVWF BANCO6CLRF AUX5MOVLW D'6r
MOVWF R14CLRF BANCO7CLRF R2

136
CLRF R3CLRF R4CLRF R5CLRF R6CLRF R7CLRF R8CLRF R9
NOMOTORRETLWO
¡Control de los motores succión expulsión y rotaciónMOTOR
BANKSEL AUX4
MOVLW D'Q'XORWF AUX4.0BTFSC STATUS.ZGOTO M4BANKSEL AUX4MOVF AUX4.WMOVWF AUX3MOVLW D'125';25Q proporción para succión 10mlMOVWF R1BANKSEL PORTABSF PORTA.4CALL SHORTDELAYBANKSEL PORTABCF PORTA.5 ¡elección de motorBCF PORTA.4 ¡encendido de ambos motoresCALL SHORTDELAY
SALTOCALL SENSORSBANKSEL PORTABCF PORTA.4CALL TORQUEBANKSEL PORTBMOVLW D'61
MOVWF PORTBCALL TORQUEBANKSEL PORTBMOVLW D'41
MOVWF PORTB.CALL TORQUEBANKSEL PORTBMOVLW 0'2'MOVWF PORTBCALL TORQUEBANKSEL PORTB.MOVLW D'O1
MOVWF PORTBDECFSZ AUX3.FGOTO SALTODECFSZ R1.FGOTO MIGOTO M2
M1BANKSEL AUX4MOVF AUX4.W

137
MOVWF AUX3GOTO SALTO
M2CALL PAROCALL TORQUECALL PAROBANKSEL AUX4MOVF AUX4.WMOVWF AUX3MOVLW D'125';250 proporción de expulsión 10mlMOVWF Rl
SALTITOCALL SENSORSBANKSEL PORTABCF PORTA,4CALL TORQUEBANKSEL PORTBMOVLW D'O1
MOVWF PORTBCALL TORQUEBANKSEL PORTBMOVLW D'2l
MOVWF PORTBCALL TORQUEBANKSEL PORTBMOVLW D'41
MOVWF PORTBCALL TORQUEBANKSEL PORTBMOVLW D'61
MOVWF PORTBDECFSZ AUX3.FGOTO SALTITODECFSZ R1,FGOTO M3GOTO M4
M3BANKSEL AUX4MOVF AUX4.WMOVWF AUX3GOTO SALTITO
M4¡Funcionamiento de segundo motor
BANKSEL AUX6MOVLW D'101; giro de la mesa principalMOVWF AUX6BANKSEL PORTABSF PORTA.4BANKSEL R12MOVLW D'30'MOVWF R12CALL RESUPERTIME;TÍempo para que caiga todo el líquidoCALL PAROBANKSEL PORTBCLRF PORTBBANKSEL PORTABSF PORTA,5 ;cambio de motor
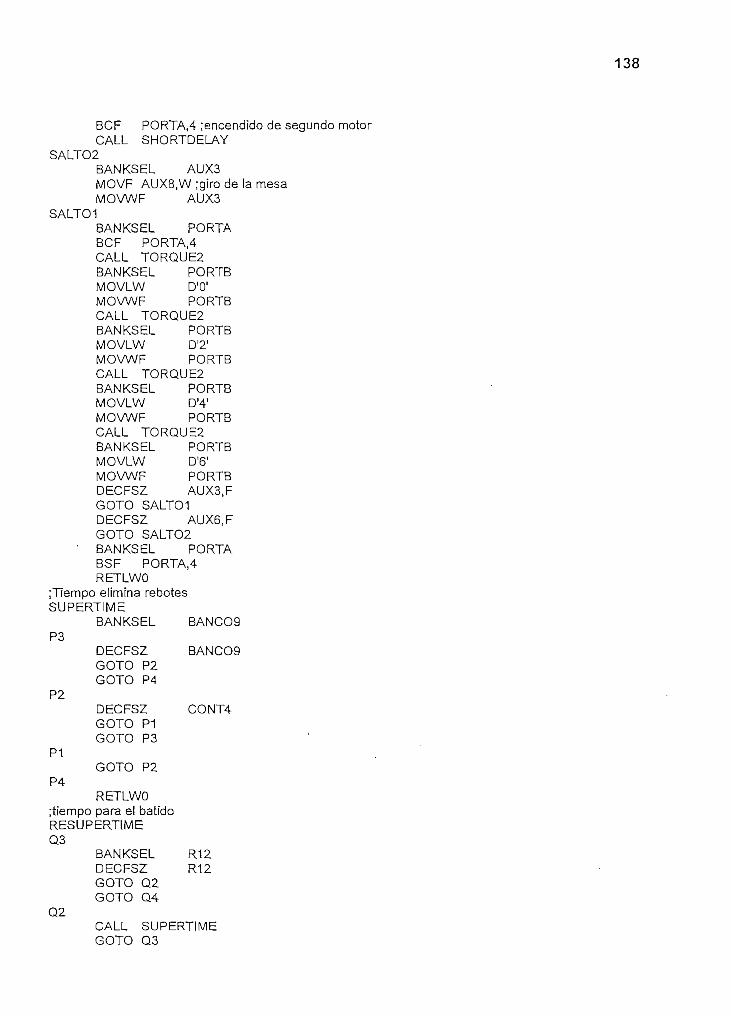
138
BCF PORTA,4 ¡encendido de segundo motorCALL SHORTDELAY
SALTO2BANKSEL AUX3MOVF AUX8.W ;giro de la mesaMOVWF AUX3
SALT01BANKSEL PORTABCF PORTA,4CALL TORQUE2
-ft BANKSEL PORTBMOVLW D'O1
MOVWF PORTBCALL TORQUE2BANKSEL PORTBMOVLW D'21
MOVWF PORTBCALL TORQUE2BANKSEL PORTBMOVLW D'4T
MOVWF PORTBCALL TORQUE2BANKSEL PORTBMOVLW D'6'
9" MOVWF PORTBDECFSZ AUX3.FGOTO SALTO1DECFSZ AUX6,FGOTO SALTO2
' BANKSEL PORTABSF PORTA.4RETLWO
¡Tiempo elimina rebotesSUPERTIME
BANKSEL BANC09P3
DECFSZ BANCO9GOTO P2GOTO P4
P2DECFSZ CONT4GOTO P1
* GOTO P3P1
GOTO P2P4
RETLWO¡tiempo para el batidoRESUPERTiMEQ3
BANKSEL R12DECFSZ R12GOTO Q2GOTO Q4
Q2CALL SUPERTIMEGOTO Q3

140
RETLWO;Pulso en el enable para que acepte el LCD;las instrucciones pin RAOPULSO
BANKSEL PORTABSF PORTA.OCALL SHORTDELAYBCF PORTA.ORETLWO
¡Envío en paquete de los datos por el puerto;b por los bits altos RB7,RB6,RB51RB4PORTNIBBLE
BANKSEL PORTBANDLW OFO[ORWFPORTB.FÍORLWOFANDWF PORTB.FRETLWO
;£nvia los datos por RA2 y RAS al 74LS139GUARDAR
BANKSEL PORTAMOVWF PORTABSF PORTA.4RETLWO
¡Establece el numero de vueltas que da el motorVELOCIDAD
BANKSEL BANCOSMOVLW B'000011111
ANDWF BANCO3.FSWAPF BANCO3.WMOVWF AUX4RETLWO
¡Escribe dígito en IcdDÍGITO
BANKSEL R9MOVWF R9MOVWF BANCOSCALL LETRACALL SUPERTIMECALL BORRADITORETLWO
¡Ordena los números en la claveORDEN1
BANKSEL R5BTFSS R5.0GOTO REGRESO1CLRF R5RETLWO
ORDEN2BANKSEL R5BTFSS R5.0GOTO REGRESO2CLRF R5RETLWO
ORDEN3BANKSEL R5BTFSS R5.0
141
GOTO REGRESOSCLRF R5RETLW O
;Subrut¡na de setdisplayadressSETI
BANKSEL CONT7DECF CONT7.FBANKSEL PORTABCF PORTA.1
^ CALL SHORTDELAYÜ BANKSEL PORTA
BCF PORTA.1BANKSEL CONT3MOVLW B'11000000' ;el cursor se ubica en la segunda fila en la primera localidadMOVWF CONT3CALL PORTNIBBLECALL SHORTDELAYBANKSEL PORTABCF PORTA.lCALL PULSOCALL SHORTDELAYBANKSEL CONT3SWAPF CONT3.WCALL PORTNIBBLE
$ CALL SHORTDELAYBANKSEL PORTABCF PORTA.1CALL PULSOCALL SHORTDELAYRETLWO
;Moíor de succión en problemas¡anuncio y bloqueo hasta que se solucione el¡problemaMOTORS
BANKSEL PORTCBCF PORTC.6CALL SUPERTIME ¡tiempo para que se ubique el ultimo colorBANKSEL PORTCBCF PORTCJCALL SHORTDELAYCALL CLEARDISPLAYBANKSEL CONT7
9 MOVLW D'27'MOVWF CONT7CLRF AUX5CALL LETRA2
FAILURE2GOTO FAILURE2
;Motorde rotación en problemas;anuncio y bloqueo hasta que se solucione el¡problemaMOTORR
BANKSEL PORTCBCF PORTC,6CALL SUPERTIMEBANKSEL PORTCBCF PORTC.7

142
CALL SHORTDELAYCALL CLEARDISPLAYBANKSEL CONT7MOVLW D'271
MOVWF CONT7MOVLW OXOFFMOVWF AUX5CALL LETRA2
FAILURE1^ GOTO FAILURE19- ¡Escritura en Icd de los problemas en los motores
LETRA2CALL S1 LETRABANKSEL CONT7MOVF CONT7.WCALL TEXT2CALL S2LETRABANKSEL CONT9MOVF CONT9.WXORWF AUX.OBTFSC STATUS.ZGOTO SI2BANKSEL CONT7DECF CONT7
9- GOTO LETRA2SI2
CALL SETlBANKSEL CONT7DECF CONT7
LETRA22CALL S1 LETRABANKSEL CONT7MOVF CONT7.WBTFSC AUX5.0GOTO PUENTE422GOTO PUENTE322
PUENTE422CALL TEXT3GOTO PUENTE222
PUENTE322CALL TEXT2
PUENTE2229 CALL S2LETRA
BANKSEL CONT9MOVF CONT9.WDECFSZ CONT7GOTO LETRA22CALL PÁTICORETLWO
;revisíón si uno de los motores esta dañadoCHEQUEO
BANKSEL PORTCBTFSS PORTC,4;f¡n de carrera superiorGOTO SL11CALL MOTORS ¡problema en motor de succión
SL11BANKSEL PORTC

143
SL12
BTFSS PORTC,5;f¡n de carrera inferiorGOTO SL12CALL MOTORS ¡problema en motor de succión
BANKSEL PORTBBTFSC PORTB,3 ;fin de carrera de rotaciónGOTO SL13CALL MOTORR ¡problema en motor de rotación
SL13RETLW O
¡revisión si existe color caso contrario;no enciende motores y llama a subrutinas¡recipl y recip2 para indicar cual color faltaNIVEL ¡reviso color amarillo
CALL READ ;leo de memoria EEPROMBANKSELMOVLWMOVWFCLRF R9MOVLWXORWF
R21D71
R21
D'O1
R6.0
NONA2
BTFSC STATUS.ZGOTO S1NA1
INCF R9MOVF R6,WXORWF R9.0BTFSC STATUS.ZGOTO SINA1BANKSEL R24INCF R24MOVF R21.WXORWF R24.QBTFSC STATUS.ZGOTO SINA2GOTO NONA2
SINA2CALL RECIP1
R24BANKSELCLRF R24MOVLWMOVWF
SINA1¡reviso color azul
BANKSELCLRF R9MOVLWXORWFBTFSC STATUS,ZGOTO SINAZ1
NONAZ2INCF R9MOVF R7.WXORWF R9.0BTFSC STATUS.ZGOTO SINAZ1BANKSEL R25
OFFAUX7
R9
D'O1
R7.0

144
INCF R25MOVF R21.WXORWF R25,0BTFSC STATUS,ZGOTO SINAZ2GOTO NONAZ2
S1NAZ2BANKSEL AUX5MOVLW OFFMOVWF AUX5CALL RECIP2BANKSEL R25CLRF R25MOVLW OFFMOVWF AUX7
SINAZ1¡reviso color rojo
BANKSEL R9CLRF R9MOVLW D'O1
XORWF R8,0BTFSC STATUS.ZGOTO SINR1
NONR2INCF R9MOVF R8.WXORWF R9,0BTFSC STATUS.ZGOTO SINR1BANKSEL R26INCF R26MOVF R21.WXORWF R26,0BTFSC STATUS.ZGOTO SINR2GOTO NONR2
SINR2BANKSEL AUX5CLRF AUX5CALL RECIP2BANKSEL R26CLRF R26MOVLW OFFMOVWF AUX7
SINR1CALL WRITE ¡escribo en memoria EEPROMRETLWO
¡Anuncio falta de pintura en recipiente"!REC1P1
BANKSEL PORTCBCF PORTC.6CALL SUPERTIMEBANKSEL PORTCBCF PORTC.7CALL SHORTDELAYCALL CLEARDISPLAYBANKSEL CONT7
145
MOVLW D'27P
MOVWF CONT7CLRF AUX5CALL LETRASCALL SHORTDELAYBANKSEL PORTABCF PORTA,2BSF PORTA.3CALL SHORTDELAYBANKSEL PORTABCF PORTA.2BSF PORTA.3
FAILURE3BANKSEL PORTCBTFSC PORTC.3RETLWOGOTO FA1LURE3
;Anuncio falta de pintura en recipiente 2 y 3RECIP2
BANKSEL PORTCBCF PORTC.6CALL SUPERTIMEBANKSEL PORTCBCF PORTC.7CALL SHORTDELAYCALL CLEARDISPLAYBANKSEL CONT7MOVLW D'27'MOVWF CONT7CALL LETRA4CALL SHORTDELAYBANKSEL PORTABCF PORTA.2BSF PORTA.3CALL SHORTDELAYBANKSEL PORTABCF PORTA.2BSF PORTA.3
FAILURE4BANKSEL PORTCBTFSC PORTC.3RETLWO
GOTO FA1LURE4;Textos falta de pintural y modo automáticoLETRAS
CALL SI LETRABANKSEL CONT7MOVF CONT7.WBTFSC AUX5.0GOTO PUENTE43GOTO PUENTE33
PUENTE43CALL TEXT6GOTO PUENTE23
PUENTE33CALL TEXT7

146
PUENTE23CALL S2LETRABANKSEL CONT9MOVF CONT9.WXORWF AUX.OBTFSC STATUS.ZGOTO SISBANKSEL CONT7DECFSZ CONT7GOTO LETRASGOTO PATITOS
SI3CALL SETIGOTO LETRAS
PATITOSCALL PÁTICORETLWO
;presenta texto de falta de pintura azul y rojaLETRA4
CALL SI LETRABANKSEL CONT7MOVF CONT7.WCALL TEXT7CALL S2LETRABANKSEL CONT9MOVF CONT9.WXORWF AUX.OBTFSC STATUS.ZGOTO SI4BANKSEL CONT7DECF CONT7GOTO LETRA4
SI4CALL SETIBANKSEL CONT7DECF CONT7DECF CONT7
LETRA44CALL SI LETRABANKSEL CONT7MOVF CONT7.WBTFSC AUX5.0GOTO PUENTE444GOTO PUENTE344
PUENTE444CALL TEXT8GOTO PUENTE244
PUENTE344CALL TEXT9
PUENTE244CALL S2LETRABANKSEL CONT9MOVF CONT9.WBANKSEL CONT7DECFSZ CONT7GOTO LETRA44CALL PÁTICO

147
RETLWO;reescrítura de la clave inicial;debido a que fue borrada para mostrar en que¡recipiente falta pinturaRECLAVE
CALL CLEARDISPLAYBANKSEL AUX5MOVLW OFFMOVWF AUX5CLRF BANCOSMOVLW D'17T
MOVWF CONT7CALL LETRABANKSEL BANCOSMOVLW OFFMOVWF BANCO6CLRF AUX5CLRF BANCO7BANKSEL BANC03MOVLW B'01000001';AMOVWF BANCOSCALL LETRABANKSEL R6 ;rescato cantidad de recipíentelMOVLW B'001100001
ADDWF R6.WMOVWF BANCO3CALL LETRABANKSEL BANCO3MOVLW B'01000010';BMOVWF BANCO3CALL LETRABANKSEL R7 ;rescato cantidad de recipiente2MOVLW B'001100001
ADDWF R7.WMOVWF BANCOSCALL LETRABANKSEL BANCOSMOVLW B'Ol000011' ;CMOVWF BANCOSCALL LETRABANKSEL R8 ¡rescato cantidad de recipientesMOVLW B'001100001
ADDWF R8.WMOVWF BANCOSCALL LETRARETLWO
¡Tiempo de muestra de los textosPÁTICO
BANKSEL CONT5DECFSZ CONT5GOTO PXGOTO FINALIN1
PXCALL SUPERTIMEGOTO PÁTICO
FINALIN1RETLWO

148
;Prímera subrutlna de letra,Ietrat,¡etra1,etcS1 LETRA
BANKSEL CONT9INCF CONT9.FBANKSEL PORTABSF POKTA,1;RS=1 LCD acepta caracteres (RA1)CALL SHORTDELAYBANKSEL PORTABSF PORTA.1RETLWO
¡Segunda subrutina de Ietra,leírat(letra1,etcS2LETRA
BANKSEL CONT3MOVWF CONT3CALL PORTNIBBLECALL SHORTDELAYBANKSEL PORTABSF PORTA.1CALL PULSOCALL SHORTDELAYBANKSEL CONT3SWAPF CONT3.WCALL PORTNIBBLECALL SHORTDELAYBANKSEL PORTABSF PORTA.1CALL PULSOCALL SHORTDELAYBANKSEL AUX2MOVF AUX2.WMOVWF AUXRETLWO
¡escritura en memoria EEPROMWRITE
MOVLW B'010000001
MOVWF 1NTCONBANKSEL PIE2CLRF P1E2BANKSEL P1R1CLRF P1R1CLRF P1R2BSF INTCONJBANKSEL WADDRMOVLW 0X00MOVWF WADDRMOVF R24.WMOVWF WDATACALL ESCRIBIRBANKSEL WADDRMOVIWOX01MOVWF WADDRMOVF R25.WMOVWF WDATACALL ESCRIBIRBANKSEL WADDRMOVLW 0X02MOVWF WADDR

149
MOVF R26.WMOVWF WDATACALL ESCRIBIRRETLW O
¡Escritura de memoria EEPROMESCRIBIR
BANKSEL EEDATAMOVF WDATA.WMOVWF EEDATABSF STATUS.RP1BCF STATUS,RPOMOVF WADDR.WMOVWF EEADRBSF STATUS.RPOBCF EECON1.EEPGDBSF EECON1.WRENMOVLW 55 HMOVWF EECON2MOVLW OAAHMOVWF EECON2
¡LOCALIDAD X DE LA MEMORIA EEPROM
¡ACCESO A MEMORIA¡PERMITE EL CICLO DE ESCRITURA¡ESTA
¡ES UNA SECUENCIA¡REQUERIDA PARA HABILITAR
¡LA ESCRITURABSF EECON1.WRBANKSEL PIR2
¡INICIALIZA EL CICLO DE ESCRITURA
LZO11
IMPIDE EL CICLO DE ESCRITURA ESTO ES OPCIONAL
BTFSS PIR2.4 ¡ESPERA QUE SE TERMINE LA ESCRITURAGOTO LZO11BCF PIR2.4 ¡BAJO LA BANDERA DE FIN DE ESCRITURABANKSEL EECON1BCF EECON1.WRENRETLWO
¡Lectura de memoria EEPROMREAD
BANKSEL WADDRMOVLW 0X00MOVWF WADDRCALL LECTURABANKSEL WDATA
MOVF WDATA,WMOVWF R24MOVLW 0X01MOVWF WADDRCALL LECTURABANKSEL WDATAMOVF WDATA,WMOVWF R25MOVLW 0X02MOVWF WADDRCALL LECTURABANKSEL WDATAMOVF WDATA.WMOVWF R2GRETLWO
¡Subrutína de escritura en memoria EEPROMLECTURA
BSF STATUS.RP1BCF STATUS.RPOMOVF WADDR.W
150
MOVWF EEADR;DIRECCIONO A LA LOCALIDAD QUE QUIERO LEERBSF STATUS,RPOBANKSEL EECON1BCF EECON1.EEPGD ¡ACCESO A MEMORIABSF EECON1.RD ;LEER DE LA EEPROMBANKSEL EEDATAMOVF EEDATA.WMOVWF WDATARETLWO
END
DETALLE DEL PROGRAMA DEL PROTOTIPO
El programa esta divido en varias subruíinas para facilitar el manejo y revisión del
mismo en caso de que se desee aumentar el rango de colores que puede entregar el
prototipo, es así que tenemos el programa principal donde se habilitan las
interrupciones necesarias para el circuito, sé inicializan los puertos como entradas o
salidas según sea el caso, y demás registros para que el PIC funcione
correctamente, en un inicio se inicializa el LCD enviando los códigos que este
requiere los mismos que se presentan en anexos la tabla respectiva y las
características del mismo, luego de esto se procede a la presentación de los textos
iniciales de tales como ESC, POLITÉCNICA NACIONAL, los nombres de los autores*de este proyecto: BAYAS PATRICIO LUIS PALIZ, tema del proyecto
DOSIFICADOR DE PINTURA, y finalmente INGRESE CÓDIGO, para la visuaiización
de cada uno de estos textos se da un tiempo prudencial, es así que luego de que
aparezca el texto final se debe esperar unos segundos antes de ingresar el código.
151
El código consta de seis caracteres el primero es la letra A, luego un número,
seguido de la letra B, después otro número, una letra C y un número más, se debe
ingresar el código en este estricto orden caso contrarío el sistema no reconoce a
ningún otro carácter y no lo presenta en el LCD, es un precaución en caso de que se
desee jugar con el teclado o por error se introduzca un carácter que no consta en el
pantón, además presionando la tela asterisco se borra todo el código que se
introdujo dando la oportunidad al operario de volver a ingresar otro código siendo
este último el que el prototipo reconozca como válido, siendo esta una ayuda
adicional en caso de equivocación del operario al ingresar el código, una vez
concluido el ingreso del código se bloquea el teclado no permitiendo que se pueda
ingresar otro código mientras la máquina se encuentre en operación, ia proporción
del color se demorará ciertos minutos dependiendo este del código que se ingrese.
Una vez que el programa reconoce una clave como cierta almacena los números que
se ingresaron y los asocia con los colores que tiene el prototipo dentro de los
envases según las letras que se ingresaron antes de cada número y ordena a los
motores de paso que giren un determinado número de vueltas para de esta manera
fijar la cantidad de color que se requiere para obtener el color deseado dando una
serie de unos y ceros lógicos por RB1, RB2 y RAS al motor de succión para que
aspire pintura de los recipientes con colores y luego la misma cantidad de vueltas
para que expulse el color que se encuentra en las jeringas utilizadas para este fin.
Una vez terminado el proceso de succión y expulsión, el programa bloquea el
funcionamiento del motor de succión-y activa al motor de rotación el cual al igual que
el primero es de paso y se le ordena que gire cierto ángulo hasta que se posícione ía
siguiente jeringa de donde se va a succionar la siguiente cantidad de color, este
proceso se repite tres veces hasta llegar a ubicar nuevamente a la primera jeringa
con la que se inicio el ciclo, se activa el motor de batido para que la pintura dentro
de los recipientes se homogenice y no permitir que se acumule en el fondo de
nuevamente finalizado el batido se borra la pantalla y aparecerá el texto INGRESE
CÓDIGO con lo que el sistema esta listo para realizar una nueva dosificación.
152
El programa esta diseñado para que después de cierto tiempo en que no se use el
prototipo este automáticamente realice una proporción mínima de colores con él fin
de que ía pintura no se seque dentro de las válvulas lo que de suceder las dañaría,
además presenta el texto MODO AUTOMÁTICO para que el operador conozca que
la máquina se encuentra en un mantenimiento automático al igual que cuando se
encuentra proporcionando una determinada cantidad de color en el modo automático
tampoco se puede introducir un nuevo código cuando se encuentra en operación el
prototipo.
Las protecciones que se introdujeron dentro del prototipo en caso de un defecto nos
permite determinar si el motor de succión por algún motivo se dañó o el motor de
rotación con la presentación de un texto de indicación FALLA MOTOR DE
SUCCIÓN, FALLA MOTOR DE ROTACIÓN.
Para la detección de falla de los motores en el caso de succión lo finales de carrera
en caso de que sean alcanzados producirán una interrupción que bloqueará a todo el
sistema, en el de rotación en cambio si no es activado el final de carrera en un
tiempo determinado provocará la presentación del anuncio y el bloque de todo el
sistema, el cual puede volver a iniciarse una vez reparado el daño cabe indicar que si
se desconecta el sistema este vuelve a reiniciar con la presentación de los textos al
inicio indicados incluso se presenta el texto de INGRESE CÓDIGO, el sistema le
permite al operario ingresar el código pero si el daño se mantiene nuevamente
aparecerá el texto de indicación de falla y se bloqueará el sistema.
El programa también permite controlar ia cantidad de color que se puede extraer de
los recipientes mediante el conteo del número de vueltas que se ordena que el motor
de succión de, cuando se ha sobrepasado el límite mínimo de color que se necesitan
dentro de los recipientes aparecerá un texto de indicación informando al operario
cual es el color que falta y como el llenado de los recipientes se lo puede hacer
manualmente y sin necesidad de apagar el sistema, se a permitido que una vez que
se llene el recipiente con el color faltante presionando la tecla de número se continúe
con el normal funcionamiento de la máquina pero si se tiene un segundo recipiente
153
con falta de color nuevamente se bloqueará el sistema parea que el operario llene
este recipiente; los textos que se presentan son FALTA COLOR AMARILLO, FALTA
COLOR AZUL, FALTA COLOR ROJO, cabe indicar que al ser el control de la
cantidad de color en los recipientes se lo hace de forma indirecta queda a completa
RESPONSABILIDAD DEL OPERARIO QUE SI EN CASO DE NO LLENAR LOS
RECIPIENTES CON EL COLOR QUE EL SISTEMA LE INDICA Y SE LE ORDENA
AL PROTOTIPO SEGUIR FUNCIONANDO ESTE SE DAÑE,
Para que sea un programa de consulta para la elaboración de otros se lo separó en
partes bien establecidas para que puedan ser empleados como por ejemplo el
manejo del LCD, motores de paso, etc., con los tiempos adecuados debido a que
para el buen funcionamiento de estos es necesario establecer tiempo fijo que no
pueden ser cambiados caso contrario no funcionan lo programas.
BIBLIOGRAFÍA
• www.onsemi.com
• wwwTexas lnstruments.com
• www. Festo.com
• www. Eca redeya. Com
• www.dosificador de líquidos
• www.dosificador por volumen
• www. Sistemas de riego, com
154
ANEXOS

155
1N4001, 1N4002, 1N4003,1N4004, 1N4005, 1N4006,1 N4007
1N4KW uíd ÍKWC7 are P
Axial Lead StandardRecovery Rectifiers
Th/s data sheci providcs ínfonnatian an submínialure sizo. a-tiafIcad moiintcd reclífiers Cor gene ral -ptirpasc low-powcr applicatíons.
Mechanícal Charactsristlc*
• Case: E-poxy, MoKk-d
• Wjfglu: tí A yran] {appartímaiüíy)
« Finish: AII l-xlcmal Suríaces Corrosión Rcsislaní and Terminall.eads are Readily Soíderable
• Load and MaiinlíngSurricü Temporature TorSalileríng l iqxisüs:
220CC Max. íbr 10 S«on¿s, 1/16* troni case
• Sfíipped ín plaácicbags, IÜOO perbag.
• Ax'aílable Tape and Rcoftíd, 5000 perreel.by acíding a. ~RL*" suffix to
che pare niiniber
• A\^ailable in Fan-Iro|d Paefíagíng. .lÜOil por box. hy adding a ~PF~
suílix la tlic part numfcwr
• Pobrily: Cailiodc Intlícaied by Pojan ty liand
• Maricing: IN-IQOL IN-W02, IN-IOflj. LN-Í004. IN-ÍQ05. IN-Í006.LN-ÍUÍJ7
WAXIMUM RAT1NGS
httpJ/onte-mí.corn
LEAD MOUNTED RECT1FIERS50-1000 VOLTS
DIFFUSED JUNCTION
MARKING DIAGRAM
AL = AssamWyLocaflonfN400x = Devica Numtierx =1.2.3,4.5,60-7YY =YaarWW =V/orkV/aek
Raüng
•peA Repetitiva Raverse vytageVArklna PeakReverse ValíaleDCBIockingWtaija
"Non-FlepaüUve Peak Reversa ' ttiqe(halfWave. singla phase, 60 Hz)
'FIMS Reversa Voltaga
"Averase RedJrted For ard Current(singla prrass, raslsüveload,«W2,TA = 75°C1
"Ncn-Bepadbve Peak Sirqa Currant(surQa appiled atrated loadcoadOonsl
Operaünc and Skraoe JuncücnTeoiperaíure Ranas
Symbol
VRFWVRWS!
VR
VRSW
VpíRNSJ
la
IFSM
TjT^
1K4001
50
60
35
1N4002
loa
120
7Q
1K4003
200
240
140
1H-W04
400
490
2ao
1K4ÍJ05
600
720
420
1N400€
900
1000
560
1X4007
1000
12QO
700
1.0
30 (far 1 cyde)
-65 ta 4-175
Unft
V3tS
tóís
Vfcilts
Amp
Amp
°c
Dúdala ahaat.
ORDER1NG INFORMATION
ind shíppiní informaían oí
aod bosícuwall valúa.
6 SwniíonJuiJDf Componot» Wmnf**.LLC,IOM
January, ZOCO - R»v, 8Pubícaü'cn OrderNumbar:
1K4.001/D

156
1N4001, 1N4GG2, 1 N4003, 1N4004, 1N4005, 1N4006, 1N4007
ELECTRICAL CHARACTERISTICS*
Raüno
Máximum [retal bneous Farward Valtage Drop(lF = 1.0*np, Tj=25'C)
Máximum FuB-Cycle Avara^e Forward Vdtage Drop(la = 1.0 Amp. Tu = 75"C, I incn leads)
Máximum Reverse Currentfrated de vatage)ttj=25«C)(rj = 100*C)
Máximum Fuí-Cvde Averie Reversa Current{lo - 1 .0 Amp. Ti. - 15*0. I herí leads)
Symboí
VF
Vp(AV]
IR
IPÍ O
Typ
0.93
-
aos1.0
-
Max
1.1
0,8
1050
30
Unli
Vdts
vttts
liA
^A
IndlcofesJEDECRealstared Data
ORDERING 4 SHlPPING INFORMATION
Devtce
1MOOI
1N400IFF
1N ÍX31RL
104002
1N40Q2FF
1N4002RL
1N4C03
1N40Q3FF
1NM03RL
1N4004
1N40Q4FF
1N4004RL
1N4005
1M4005FF
1N4005RL
1H4006
1N4006FF
1N4006RL
1N4007
1N40Q7FF
1NW07RL
Packaga
Axial Leíid
Axial Laad
Axial Laad
AxIaJLaad
Axial Laad
AxiaiLaad
A¡(iaiLaíid
Axial Lead
Axial Laad
Axial Laad.
Axial Laad
AxlaJLaad
Axial Lead
Axial Lead
Axial Laad
Axial Lead
Axial Laad
Axial Lead
Axial Lead
AxJaiLead
Axial Lead
Sfilpplng
1000 Unlts<Sag
3000 UritsBox
SOOO/Tape & Rad
1000 UnltsBag
3000 Urits-Box
SOOO/Tapa & Real
lOOOUnifSíBag
3000 Urtts,Box
SOGO/Taf» S Rad
1000 Unlts<B3Q
3000 Urtts-Btw
SOOO/Tapa S Rae!
1000 Unlts,Ba<3
3000 UrttSíBox
5000/Tapa i Raei
1OOO UnltsyBag
3000 Urits>8ox
SOOOAIafw S Rad
1000 UnltSíBaQ
3000 UritsBox
SOOO^Tape & Reeí
http:ffonsami.com2

157
1N4001, 1N40Q2, 1N4Q03, 1N4004, 1N4005, 1N4Q06, 1N4007
PACKAGE DIMENSIONS
AXIAL LEADCASE 53-10
ISSUES
.JEDS: PO-« cxffue ÍHX.LVTU'
OM
.1
(tf
noesNN
O.IS1W.1
un
1í«<
doM
HLUWTIB9ew I MJC4.19
1TI—
IB
\33
http://orraeml.com3
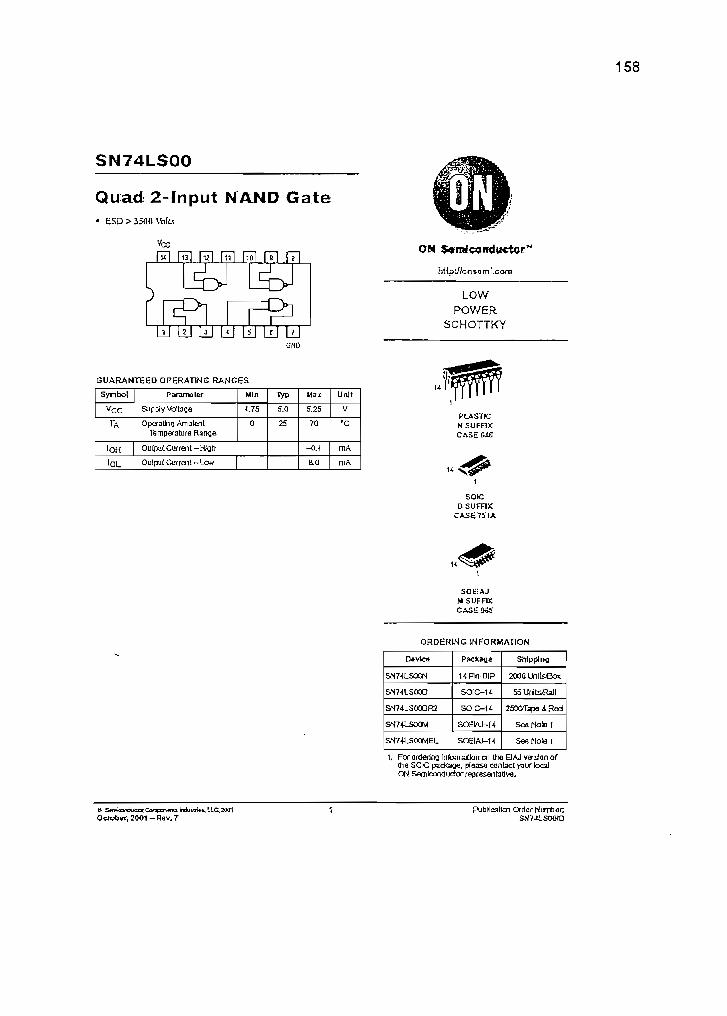
158
SN74LSOO _
Quad 2-lnput NAND Gate• ESD>35fHIVaks
Vcc
m m
LL! LU iiJ LiJ LsJ LÜGND
httpi//on*a-mLconi
LOWPOWER
SCHOTTKY
GUARANTEED OPERATJNG RANGES
Symbol
VCGTA
'OHIOL
Parame lar
SuppíyVdtage
OperattiQ AmblentTempírature Ranue
OuípJtCurrent-Hlífi
OulpJtCuffeit-Lcw
Mln
4.75
0
Typ
5.Q
25
Max
5.25
70
-0.+
8.0
Unlt
V
CC
niAmA
iSOK:
DSUFFIXCASE751A
1
SOE1AJMSUFFKCASESWS
ORDERING INFORMATION
D«Vtca
SN74tSOCN
SN74LSOOO
SN74LSOOOR2
SN74LSCOW
SN7ÍLSOOWEL
PftCtOflS
U Pin DIP
SOIC-14
SOIC-H
SCGLAJ-14
S06IAJ-H
ShippilMl
2(XKJUnltsBac
ssurífM^i
25000apa & Reeí
Sea Note 1
Sea Note I
1. Fororderlng Infannaflan on Ihe EIAJ vaslanoftíieSOIC package, píaasaccntactyaurlocalON SeailcarxJudcr representativa.
e S»mtDO(íuatirCorepriimcilndvj»ii-w.LLC,2aJlOctob»r,2(HM-Rev.7
PubHcaüon CrdaSN74LSOWD

159
SN74LSGO
DC CHARACTERISTICS OVER OPERATING TEMPERATURE RANGE (unless ofherwise spacífíed)
Symbol
VIH
VIL
VJK
VOH
VOL
IIH
IILtos
toe
Parameter
InputHlGH \fcltaga
InpütLOWVdtage
Input Clamp Diada \taltaae
QutfxitHlGHVdtaga
OutpJtLOWVdbQe
IrputHlGHCurrerí
InputLOW Curren t
Snart Circuit Currarí (Nota 2)
Pcwer Supply Currarí
Total. Oulput HIGH
Total. Oufput LOW
Umit*
Win
zo
2.7
-20
Typ
-ÍX65
3.5
0.25
a.35
UaX
0.8
-1.5
0.4
0.5
20
0.1
-0.4
-100
1.6
4.4
untt
V
V
V
V
V
V
VA
mA
mA
mA
mA
Test ConotÜam
Guaraníeed Input HIGH Vdbtge fcrAí Inpuís
Guaranteed Input LOW Vdtage (brAS Inputs
VCc=MIN.l|H=-íamA
VCC=WÍN,IOH w^x V|[.j =VJHorVjLperTmlnTabia
lcL = i.OmA
'OL = a-0rnA
VCG = MAX, v¡
VCC=VCC^N.V]N=V|LQfViH
N=Z7V
VCC"MAX.V|pj=7.0V
Vcc=WAX,V|r-j=0.4V
VCC=MAX
VCC-MAX
2. Notmcre Ifianoieajlputshauld beshoríad ata lime, ñor fbrmora (fian 1
AC CHARACTERISTICS (TA = 25CC)
5econ<).
Symbol
"PLH
>PHL
Parameter
Turn-OffDalay, lnpu£ b OJlput
Turn-On Delay, Inputto Oulput
Um«*
Mn Typ
9.0
ÍO
Max
15
15
Untt
ns
ns
Test Condrfloos
VCG-SXJVCL = 15pF
http:ffofiaemf.com2

SN74LSOQ
PACKAGE DIMENSIONS
160
A A A A A A A
N SUFFIXPLÁSTIC PACKAGE
CASE 546-06ISSUEM
£l 7
V V V V V V V
tB
1.
i »<N&OWlIDCEWtEHCf líAW'MÍH
0*1i
?0t0HjJE
LM
BCME3MM
ftTIÍ
S.l*t
sais*MJ
9_ioaflíW
ato»a. ns«»
—
MXOJ70
cu*5OOZl
fl»0
96C"«!
OOIS3. US
8J10
I»1
wU. HÍCTEH iMM
11,1 eílO
i«a^si.nJWi ^7a»3.«JJ7_-
MXtua
u*OÍSl«
SfC.'.'1<L!M
í.a7J7
19*
D SUFP1X
PLÁSTIC SOIC PACKAGECASE 751A-03
ISSUE F
H H H R R H Hlt* »
O i i T
fl~5~l P7PL
| ||^|a25(aDioi9|BtS)
H É H .H H H H f
O WrfVtO/;i*lU[TEfU
n I*U MXB FítóTWMJí 0,1 Vsce.
i, n»ie**> D toes «r Ma
nvíBC0f
(1JK«
r
MlVCTEm
Brtinun1J«F
*J6»«
t?7S-lt
*HO11
tw
WJtS7Ítai1713-tí
1JÍ_
*íc9J5OJ6I"
(Jfl_
MOCS
IWOUT
9.1 SO
JÜM
MI*
M1Ífliw
«K»WW
9a
tzx
M/a wO-llí
&K9í ítí.f-«t
!«7S-Wt
*-(«
Jd
t?**

161
9DL3027
SIÍ5402, SStfi4LSD2, SBE4S02.
SK74ÍH. SÍI741SQ2, Sfl74S02(HJADWÍPLE 24SPUT PGSmVE-KOfl GATES
Otitiort* tncUxtó PtBBtie "SmaHpyc^agj*, C*/fltnb CWfi
Tho
Tho»c devícci contaín íouí tnd*p*n dwit 2-ir>fnrfNOfi gates.
. 5N5ÍL502. and 5PJ5AE02 »f«d far ap«r»tfaii ov»r th« fui mtfHary
raogc af -55°C to 125°C, ThflSN74LSQ2, and SN74S02 ara
charnctafued fo* oooraiJon from 0*C to 70^0.
TMtE («ctí
/V nümb«r« iSojwfl <K» (of O. J. *nd N (
logic tfiji r&m (poiJtív» l
v - A t t q t V ^ A - ^ a
WtttLCOX. «P«4SI33 , , .
1YlA'rtaIB 032Y
2A 0s
GNC ,
123-^8
8 D -
... WPACKAiCC
IYCJ
VccC
ZOQ
2 Y C 6 103 38• GNO
. ., FX PACXAS5Vtevn
IB
N£2YWC
2A
3 ± • 2t
3*1 '
i:]«
rczr"%•*\C
nC
WS«ct*C
/
.Jfl
a 10 n r? 1.1£1SS¿;
JU1.
p**t (vr«l tíM0tt« «T lií r*
TEXAS *^fINSTRUMENTS

162
SS54G2. SHS4LSQZ* SÍÍ54S02,SM74fl2r SIÍ74LSS2, SH74SaZOUAORUPLE Z-iHPUT POSITIVE-fíOfl OATE3
»ch*a»*cíc» Ca
0/mJT
'orinas ovar ofWHrating fm«-slr tampwTiTUr» ring* (unla*J oth«WÍw flOtod]
Suppíy vofíafi», VCC Ú*« Notó 1) ........ ... ....... . ...... . . . . . . . . . . ..... . ...... 7 Vinout voítaaa: '02. '3O2 .... ...... ..... ...... .1,.., < . , * . , ...... . . . . . , , , , . , . , , . 5,5 V
JLáóí ____ . ..... . ......................................... ..... TVOff-iiat* cwjepot votago . . , , , , , , , , , ..... , ......... , ......... . ............. .... 7 V
ang«r; SN5*' ....... . ............ , . . . , , . , -56°C to3N74-' ..... ,. ..................... .... 0°Cto
lampón* tur* rano* . ......... . .......... , . ........ , . , , . , - . . . — flS°C to 150*C
NOTI t. V«ít*o» vtkM* »r* vñfi ™ao*ct co
TEXAS -INSTRUMENTS
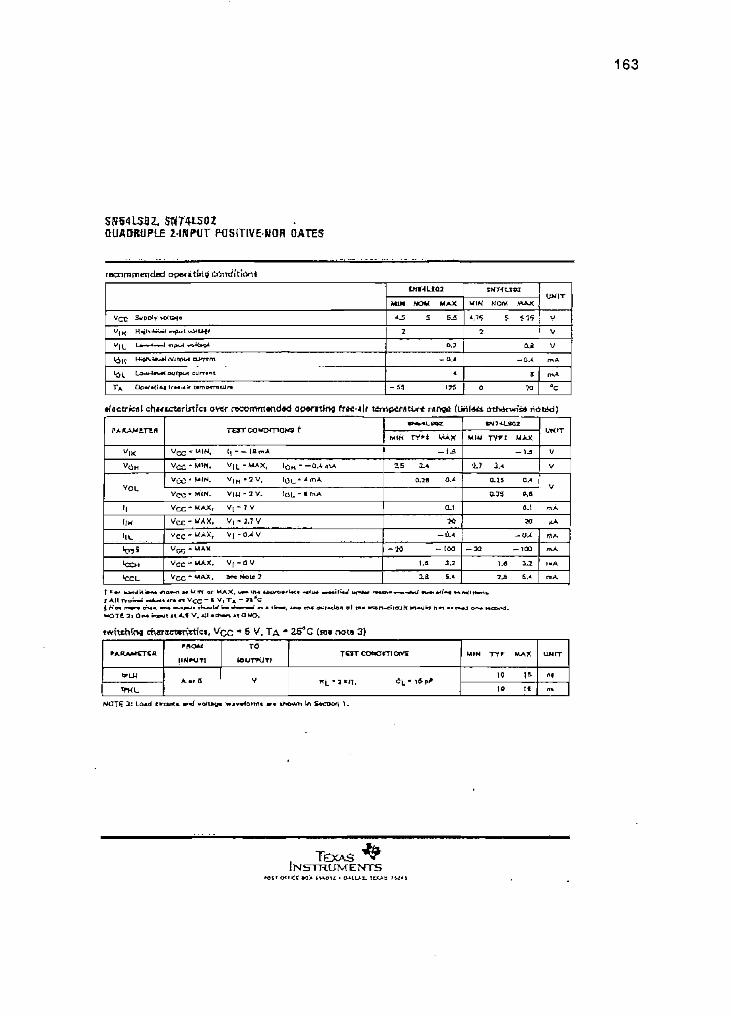
QUAEHHJPIE MHPUT PtfSlTEVE-HQR DATES
163
recarnrnendcd
vcc suotyv vodwiitV(H H-ai- — -i -^Sut^VLH'
V[L L»— *-— J *!(>« ~*W»9¿
1<¿H. HiflMíiíJj iVlTíHjl CLMTtm
IQ-^ Lo.n ¡jv* atJCp-* curr»nt
TA Ga*í*ii*-l leu-*'* wm»?n»iur«
iMHLicuMlM HOM M/OC
4.5 5 SJS
2
0.3
- Q.J
4
- US 1JS
SNT1UW
Ml« MOM WAX
*Tí f ÍT5
7
IXfl
-0.4
5
o ?a
UWIT
u
V
V
m&
mA
ac
ov«f r«omrn*nd«J a{i«Ttínfl fr«-j|r
PAJLAMC.TCH
VIKVÓM
Vou
ll(IH
'IL
«CT«
ICCM
tCL
TESTCOMOmCCíS t
Vcc -r WIN, 'l~- lflt^A
VCC-WÍM. VI L-MAX, ií)M--a.-t-'^V¿¿-MIN. V , M . 2 V , ] O L .4mA
VCC-MIN. VKJ-SV . iQ(,-imA
VCC" MAXí V[ -7 V
VCC-WAX. V, -2.7V
v c c -WÁX f V t - O ^ V
Vr¡r¡ - MAX
Vcc - UAX. V| - Q V
Vcc ' MAJt. S« «ote 2
»»4l,«wr
Ml TV»* MAX
-f^
^5 3.4
0.19 O.¿
0,1
»
-Ú.4
— w - i«iI.« 3J
za 5.*
«N74(JQX
MIU TYFt MJO<
— U
ÍJ ¿.4
0.35 <M
a35 WS
fl.l
3O
-y^-
-30 -100
i.« aa2J 6.4
u«ir
i/
V
V
rnÁ,
**m^-mA
lo A
mA
f**r tox^^WM^Kuwi •• U ir* or MAX. «•• U>* MtpíOBí Uta «Ju* ,vwn*4 wr^v -rioír mi- J *w«xro« «n ln -n.
wOTfi 3i Oi~t VKMI it <-f V. ilJ •o«*miauo.
iwftchtm charicwrvrtii;*, Vcc * 6 V, TA *
PAKAMCTCH
WLH
WL
PftOM
A.»r a
TO
(OUTTÜTÍ
V
264C[w»r»W3í
TCST COt»O«TI OWS
-L-,-,.
MIN TVr MAX
19 1*
10 It
UMIT
n»
m
NOTE 3¡ La«d

164
Hex I nverter
Vccnn ra R nn r«i ni mu ü ü
nQJ LlJ liJ LÜ Lll LlJ ÜJ
GND
GUARANTEED OPERATING RANGES
Symbol
VGCTA
IOHIOL
Parama t&r
SUpply Vtoííage
Operaünq Ambtentrempa'atura Ranga
OufputCtirrent-HIgfl
OuíputCurrait-Lcw
I*ín
4.7S
0
Typ
5.0
25
Max
5.2S
70
-0,4
ao
Unlt
V
Ec
mA
rnA
http://bnsemi.coni
LOWPOWER
SCHOTTKY
i
SOBAJMSUFRXCA5E965
ORDER1NG INFORMATION
D«vlce
SN74LSCHN
SN74LS04D
SN74LS040R2
SN74LS04M
SN74LS04MEL
pACkage
URnDIP
sac-14
sac-i4SOBAJ-14
SOBAJ-14
Shtpplng
2000 Unlts,Bax
55 Uhlts taíl
2503/T^pe 4 Red
Saa Noíe 1
SeeNofel
1. Far andarina InformatfanonííiaElAJ versicnafttie SOIC package, pleasa contact voar localON Semícoxluctarrepresaníaüva
B S«7ii<ijndu<Ja-Canipai*nt«lndoKri*».[J.C.2<»IOclofter, 2001 - Rev. 7
PubBcaÜori OrdarNumüar.SN74LS04/D

165
SN74LS04
DC CHARACTERISTICS OVHR QpERATING TEMPERATURE RANG6 {unless otfierwse spodfiedj
symboi
VIH
VIL
VIK
VOH
VOL
IIH
IILlos
ice
Para meter
lnputHIGHU]lt>3a
Input LOWVoltaoa
Input Clanp Dloda 'vültaae
OutputHlGHVdtage
OutoutLOWVcítaQe
Input HIGH Current
Input LCWCurrent
snort Circuit Currert (Nota 2)
Ptwer Supply Currsnt
Te*al,OufputHIGH
Total, Ou(putLOW
Umtts
Min
2.0
2.7
-20
Typ
-0.65
3.5
0.25
0.35
Max
0.8
-1.5
0.4
0.5
20
0.1
-0.4
-100
2.4-
6.6
Untt
V
V
V
V
V
V
\iA
mA
mA
mA
mA
Tesí Condtt-looí
Guaranteed Input HIGH Vültaga rcrAJÍ Inputs
Guaranteed Input LOW Vdtege farAlllnpuís
Vcc=MlN.liN=-iainAVGC = WIN, IQH = MAX, v^j = V| H
or VIL per TfUth Taüe
VCC=WAX,V|N=2.7V
Vcc=MAX,VJN=7.0V
(/CC=MAX,VlN=0.4V
VCC=MAX
VCC=MAX
2. Natmcra tnanona oulpulsíKíiJd be síiortad ata Um€. ncr farmoretnan I seccod.
AC CHARACTERISTICS (TX- 25CC)
symbaí
ÍPLH
fpHL
Pararne-ter
Tum-OffDelay. Inputb Cu iut
Turn-On Oalay. Input ta Cutput
Limite
MSn Typ
9.0
10
Max
15
15
Untt
ns
ns
TístConbtíloiw
VCG = 5-0 vC[_=15pF
h tt p://ons« m!, co m2

SN74LS04
PACKAGEDIMENSIONS
166
A A A A A A A
V V V V V V VA
N SUFRXPLÁSTIC PACKAGE
CASE 646-06ISSUEM
J_ WrfWtótí l
°¥i.
90fo4fK
t
•
ItfWSWí
9J11
<Ll«t9CT1»fj.ai»
n via»4.IK
9J«3
«JOJTÍO
aig;?aii3077
KC?MS3<MS
aus«19
ir
Wl*ETtf?í
MHlf.1(
JB)04«TOT}¿t
i -a{UOJO
ÍJ7
Mí
IUD
l«
a»17f
*c'!(
w«JttIB!fl-
DSUFFIXPLASTÍCSOIC PACKAGE
CASE751A-03
ISSUE F
P cocs ioK.AllCWOií s«*u te 1.1»
ñuBf0f(1/t•r
WJJNCTFW
«M
)-WIJ6
flj*
a«o177
a.it410
9*
K)
Mf
í.»1719.Í»
IXÍSC
071«Jt
7*tx
KCHE9HH
0.1 WODMÍW*«W€
C"Wao*OKU
»•9JW
«r
Í.IÍT
4.C0
9-Ctf*.9«
M4T«tw*05*
r*«JM
httpr/íonse rni.com3

167
SN74LS138 ^^
l-of-8 Decoder/Demultiplexer
The LSTTUMSI SN74LSI3S ¡s a Iiigh spccd l-of-3 DtcodcctDornultípkxer. Tíiis diivicc ís Edcalfy suited (ar high spo«l bipolarnKmary chip sakct address dccodíny, Tin; múltiple rnput. enablüsaflcnv parad-:! expansión to a l-ot-2-í (Jv-ccxftír usmg just tlire¿ LS IJSííovíces ar [o i I-af-32 dücoder using faur LSIJSs and one inv«mer.llic LS13S ís fUtrrKoíod wftJi tlw Scholtky barrier díode proeess [behiuh íptitíd and is eompltítüly compatible \vidi al] ON SomícunduclorTn. HimíliVs.
• Dínmltiplcxing Capubiliiy
• Mullipk Inpul h'nabk Ibr Easy Expansión
• TypJcal poxvcrDtssiptuinn of .12 m\
• Acííve Law Muiiwlly Excliustvc Outpub;
• ínpíit Clunip Día Jes Limit Híyli SpOtídTiírmirutíon EíTects
GUARANTEED OPERATING
Symbo)
VCGU
IOHIOL
Parame tar
Suppíy'/olbíia
Operaliní Ambl«i(Tflfnpa"alijre Ranga
OufpJtCurraií-Hfgn
Oufput Curraií - Lew
Min
4,75
0
Typ
5.0
25
Max
5.25
70
-0,4
ao
Unlt
V
rc
mAmA
n seml.com
LOWPOWER
SCHOTTKY
ORDERJNG INFORMATION
DflVlca
SN74LS139N
SN74LS1S8D
SN74LS1380R2
SN74LS138M
SN74LS138MEL
P*cfc*ge
lephDiP
SOK>16
SOK>16
SOBAJ-16
SOBAJ-16
Shfpplng
2QOO Unlts,Box
MUfits'Ral
2533/rape A Red
S9e^íoCe1
Sea Note 1
1. ForardeflnalnfcinTtatkJncntna EIAI verdón o"ttie SOIC padoja, pleasa cantad jourlocaíCM Semiconductor representativa
e SmJranduaorQirapawnti Induurin, U.C.30JIOctober. 2CO1 - Rev.7
pubücallon Ord

168
SN74LS133
CONNECTÍON CHAGRAM CHP (TOP VIEVV)
Oí O? O? 04
LiJLiJLiJLüLiJLiJliJLiJ>0 A, Aj E! E2 E3 07 GND
NOTETho FWpakwfMOnhaitha w*rwpínoiíi (Ctntwctbn DíaffairJ a»If» Dusí In-Lh«
LOADlNG (Ñatea)
PIN NAR1ES HGH
(Inpjls- 05 ULLCWlIrrpute 05U.L
£j _ Enabte(A3iv9HlGhÍlipil 05U.LOD-O? /eíwLOVVOulpiXi WU.L
LOW
O 25 U.L(US U.L05S U.L
SU.L
^ 1TTLUní Load (U.L¡ - JO |iA HlGHfl.8 (M LOW.
LOGIC SYMBOL1 2 3 456
1 123]
Oo Q] Oj 03 0< Oj Oc O?
r n n n r1SH 13 12 11 10 9 7
LOGIC DIAGRAM
http:ffon9enti.com2

169
SN74LS138
FUNCTIOKAL DESCRPT10N
The LSÜS Is a lijgh speed ¡,-oP-S Decodür/Domu[tfp[e.xerlábncaitíd wíih [fotí tow power Scholtky barrícr dÉcdeprocess. Tlie decader accepis Üirce bínary welghted ínpuL<;(AQ, A[, A?J and -J-'dtfn enabled próvida? eícEil nmtuallyexclusive active LOW Outputs (OQ-Oy). T|ie_LS13SFeatures lliree Enable ínputs. wo active LOW (E[, ET) andone active HIGK (£3). Alt autputs will be UlCíl unless ELand £7 are LOW and £3 is KIGH. This múltiple cnablo
ftmctfan allows casy paral [<;[ c.xpansíon of ihe devícc to al-of-32 (5 lines to 32 lines) decodcr witíi jusc four LSlSSsand one inverter. (See Figure a.). Tíie LSI3S can be uscdasan S-oucpuLdtímuIcip[üXürbyusingoneot'the active LOW Enable inputsastJie dala Enputand the other Enable ¡nputs as strobes. Tile línabfe inptiíswhich are not usíd miist be pefmancntly lícd to [heirapprcprfate active HEGH oracltví LOW síate.
TRUTH TABLE
INPUTS
E! £2 £3
H XX HX XL LL LL LL LL LL LL LL L
XXLHHHHHHHH
AQ A! A2
XXXLHLHLHLH
XXXLLHHLLHH
XXXLLLLHHHH
QUTPUTS
ooHHHLHHHHHHH
o-iHHHHLHHHHHH
02 0
H HH HH HH HH HL HH LH !-H HH HH H
1 O.í
HHHHHHHLHHH
05
HHHHHHHHLHH
os
HHHHHHHHHLH
07
HHHHHHHHHHL
H -HIGH «álaga L
i ,
I J
I
_!_li I
IHzd
AQ A! Aj E
LS133
OQ O-i 02 03 Q4 0S Of 07
I
II
)/fl AI Aj E
LS133
*l^j A-j Aj E
LS133
LS04-
-po-
mLS13S
J T T T T T T Í T T T T T T T T T T T T T t T T T T T T T T T 1Figure a
h ttp:ff o ns«mi. co m3

170
DC CHARACTERISTICS OVER OPERATING TEMPERATURE RANGE (unless otherwse spedfied)
Symüoí
VIH
VIL
VIK
VOH
VOL
IIH
IIL'osice
Parama tar
InputHlGHVoltage
InputLOWVotoQe
InputClamp Dada Vtttage
CutputHlGHVdtaoa
OutputLOV/Vnlbqa
InputHlGHCurrart
InputLOW Current
Sbortarcult Current (Nota 2)
Power Supply Current
Lfcnfts
Mí»
2.0
2.7
-20
Typ
-0.65
3.5
0.25
0.35
Max
0.9
-1.5
0,-í
0.3
20
O.t
-04
-100
10
Untt
V
V
V
V
V
V
uA
mA
mA
mA
mA
TestCondlflons
Guaranteed InputHlGH \AVtage forAJInputs
Guaranteed InputLOW Uiltaqa farAfllnpute
VCc = WIN,I|N=-iarnA
VCG = WIN, IQH = MAX, VIN = VIHor V¡(_ per Trulh Tabla
ICL = 4-tJ mA
lcu-3-^mA
Vcc-MAXVjN
VCC = Vcc WIN,
parTrutliTaüa
= Z7V
VCG = MAX, VIM s 7.0 v
VCQ = MAX, Viw = 0.4 V
VCC = MAX
Vcc = MAX
Z Natmcra Oían ona oufput sfrauld be shartad at a urna, ñor (ar mera líran 1 ssccnd.
AC CHARACTER1STICS aA=25eC)
Symíxil
!pLHtFHL
ÍR-H<PHL
ÍPLH^L
"PLH'PViL
Pararneíar
RopaaaUon DeiayAddress \a Oufput
PropaqaUon DelayAddress b Cuíput
FYopagalion DeJay E] or £2Enatfa ío Oulput
Propaqatíai DeJsy £3Enatís ta Culput
Leváis ofDelíiy
22
33
22
33
Llmlfc
wn Tyu
1327
1826
1221
1725
Max
20il
2739
1832
2638
Unlt
rts
ns
ns
ns
Test Con cílElciis
vcc = s.avCL = 15pF
AC WAVEFORMS
Rgurel. Figure Z
h ttp:ffonse m! ,co4

SN74LS138
PACKAGE DIMENSIONS
171
N SUFFIXPLÁSTIC PACKAGE
CASE 643-08ISSUER
i. KX*«CCO««ít6WnOtl>J_ -
pM
ni0FnH
K
V•1
MOCSw
cijon«o0-1 «SffIS5WO
MX1T7O
07W
arna.»i
Í-TO
awaísc«T-jisr
0«B9-117ftJW
«'
flDT°
a.aiiÍ.T»ajw
la'ttHO
HLL*€TSW«K
líBlf «
JM9J«10?
«UXH'íÍBí M4iJ[J7
7W *fI7T*íT
«13-WJ»a*
?J«JJO7?(la*
ait 1 (31
hRpt/fonseml.com5
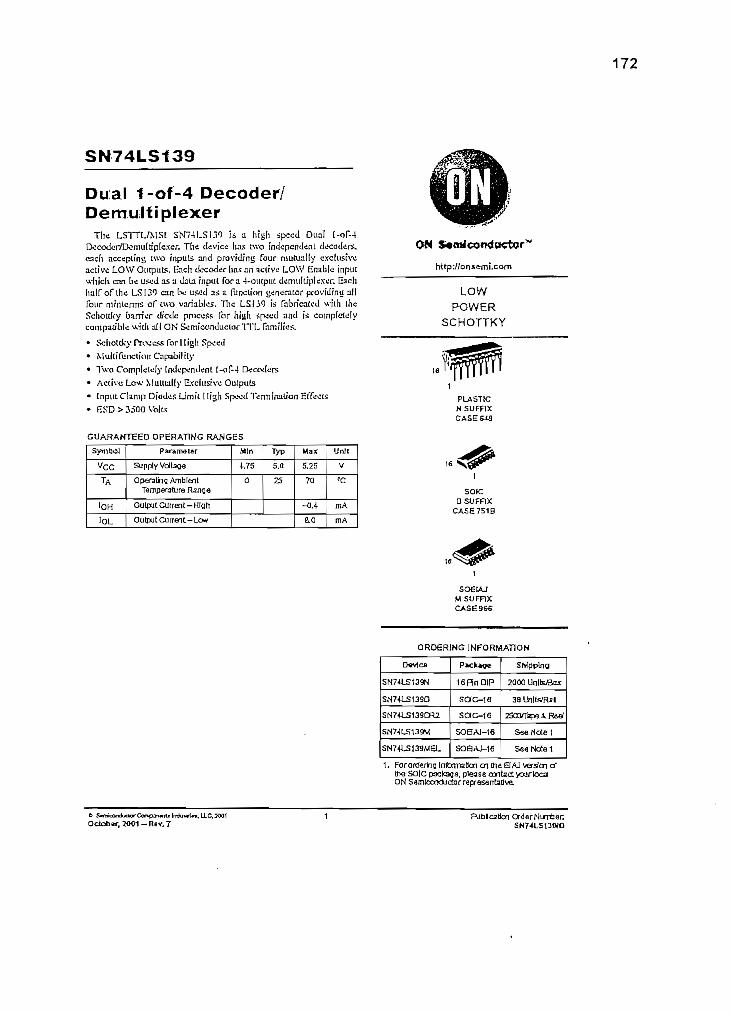
172
SN74LS139
Dual f-of-4 Decoder/Demultiplexer
The LSTTL/MSÍ SN74LSI39 is a high ¿peed Dual l-of-4Dícoder/Demulüplexer. The devíce has t\vo indepcndent decoders.caed acctíplíni!, two inpuls and provÍ<ííflg four muíually exclusiveactive LOW OliCputs. t-ach dccoder líos an aclive LOW Enablc rnputwllíckcan be usedasa daüi input fora 4-outpUt demuítiplexur. Each
lialf of ihc LS130 can be usad as a íuncüon gentírator prováling ^11íbur niínlenrií: of" txvo variables. Tin: LSI39 is fabrícaíed wfih UKSchottky bam'cr dr'ode proccss for hi ih spwcd and Es compíclelycampatfhk with afl ON SemíconduclorTTI- famílieí.
• Scholttcy Píxxitíss forlligíi Specd
• Multifunciion Capobilily
• T\vo Complelely Independen!. f-oC-4 D<coders
• Active Low MuUialíy [-.-ícíusive OuipuLs
• tnput Clamp Diodos U'mit! Irgh Specd Tcrmifialíon Effects
• ESD> 35(10 Volts
GUARAMTEED OPERATlfJG RANGE5
Symbol
VCGtA
IOHIOL
Para me lar
Suppíy Vdtag«
Opía-aling /VnhlentTamperatura Ranqe
OulputCurrent-HIstl
outpotCurrent-Lw/
Mln
4,75
0
lyp
5.0
25
Max
5.25
70
-0.4
ao
Unlt
V
;c
mA
mA
http^/on&emi.corn
LOW
POWER
SCHOTTKY
ORDERING INFORMATION
D«v1c8
SN741S139N
SN74LS139D
SN74LS139DR2
SN74LS139TV1
SN7-ÍLS139MEL
P»ck4ge
16RHDIP
SQC-16
sac-iGSOSAJ-Í6
SO3AJ-16
SMppIng
2000 UnlfsBax
38 Unlts/Ral
2S<XVrap9iRwí
Sae rtrte ]
Sea NoCe 1
1. Rjrandarina InfiDimaüonon Ble ElAJ verslcn oftne SOIC pactaga, pteaseON Samlcoocxjcíorrapresantatlva
e S»™oor«íucwrCar»p3mitilndi)»*i«»,U.C.3<>)1Octobw, 2<HH - Rav, 7
Publcaüon CrderNimbar:SN74LS13WÜ

173
SN74LS139
CONNECT10N DIAGRAM D|P (TOP VtEW)
VCQ b *t °th Oti 0?h O*
uJLlJLiJUJ>tt Ai, 0o, Ou
PINNAWES
MOTE
GNO
LOADIHG (Nota 3)
HfGH
05U.L05 Ui.WU.L
LOW
025U.L025 U.L
5U.L
LOGIC SYMBOL
1 2 3 15 U 13
1 1E AQ AI
DECODERa
OQ &l 0¡ Oj
E AO A]
DECODER b
OD Oí QZ 03
TTTT TTTT4 5 6 7 12 11 10 9
VCC = PIN 16
h ttp: ffon»mf .com2

174
SN74LS139
LOGJC DIAGRAM
0>¿
Acá A-ja Eb©I I® ®
Aob Ajfa
©I I©
0 © © © @ © <9 ©
FUNCTIONAL D6SCRJPTJQN
The LSI39 is a hfgh spcdtí dual l-of-4demulu'ploxcr fübricated with thc Sclioltky borrier díodeproccss, l^íie devicc lias tsva independen! decodcrs, caed ofwhicEi accepc tvvo bínory weígíitcd inputs (,-Vj. A(} and¡imvidtí foitr mutual [y exclusive active LOW outputs(00-03). Each decocícr lias an active LOW Enobtc (E).Wlirn E is KEGK líl auípuls ate íbrccd DUCK. The cnablc
can be lised as ihe data input Ibr a -í-outpliC demulliplexerapplicalion.
Each Iralfof (he LSI 39 generales alf roucmínicnms af Uvovariabas. These four mínterms are useful rn somcappfícations. rcplacing muííiple gaíc íunctions as SÍIO\VTÍ inFíg. a. -¿nd thercfay reducing llie nuniber of pacícayesrequírtid ín a logíc net^'ocfc.
TRUTH TABLE
WPUTS
E
HLLLL
ACXLHLH
AI
XLLHH
OUTPUTS
00 O-i 02 03
HLHHH
HHLHH
HHHLH
HHHHL
L-LOWWbaa LJW(X - Dont Carc
AIE
Al -J A{
Flgur» a
http:ffonsami.com3

175
SN74LS139
DC CHARACTERISTICS OVER OPERATIHG TEMPERATURE RANG6 (untess otherwse spwfied)
Symbol
VIH
VIL
VIK
VOH
VOL
IIH
IILiosice
Para meter
IrputHlGHVdtaqe
InputLCV/ Voltaje
Input Clamp Dtode Untase
OUputHlGHVoltaae
OutpuiLOWVtttage
InputHlGH Currant
InputLCWCurrant
Swrt Clfcult Currait (Note 2]
Power Sippíy Current
Lliiil tí
Win
ZO
2.7
-20
Typ
-0,65
3.5
0.25
0.35
M^x
o.a
-1.5
0.4
0.5
20
0.1
-<U
-100
11
Uiüt
V
V
V
V
V
V
tiA
mA
mA
mA
mA
TestCcnd|Uo»%s
Guaranteed InputHlGH VblbaefcrAílnpufs
Guaranteed InputLOWVoífaaa farAl Inputs
Vcc^MIN.Iins-iamA
VCC=WIN.[OH=WAXVIN=VIHor V|Lp€rTrudiTaHa
lo. = w mA VCG - VCG WIN.t a^ * VIN-VILU' VIH'a. = 8-° mA par rruUi Fd^a
Vcc=WAX.V,N=2.7V
VCC=MAX,VIM = ?.OVVcc=MAX.V|N=0,4V
VCC=MAXvcc=w«c
2 Notmera tíian oía outpjtshould beshorte<3a[a tíme, ncr farrnora tfun I sacorxí.
AC CHARACTERISTICS {TA=2S°C)
Symíxit
>PLHERHLÍPLHtpHLIPUItfUL
Paranvalar
FYqiaqatíon DeíayAddress to Output
PrcpacaÜcn D«iayAddress ío Oufput
PrcpaaaUon DíJayBiatía lo Oulput
Levéis ofDelay
22
33
22
Llmlt»
win Typ
1322
1fl25
1621
Max
2033
2938
2432
Unlt
ns
ns
ns
TestCoodlfiOíís
VCG - s.o vCL = 15pF
AC WAVEFORMS
FIgur* 1, Rgure 2.
http://onsemi.com

SN74LS139
PACKAGE DIMENSIONS
176
NSUFFIXPLÁSTIC PACKAGE
CASE 643-08ISSUER
U-M
amf,nfpfTHif.i.nJ
MCHE9
war«07M
SU*«Blia*si
»tíí-^n
n TTO5. IIS5OT9J5
aloiMT9tfcnw«
WW0-lie
*»a*JS5
0.01)9.1*fl-JW
la"ao«
WLUWTTMnx
it«tSf
J«
W*1(0
•LU'
1*M
IOC
IM
Íi5
IJJ
JM yetTTVf
O717JO7»4"
4il
aj»i»!}*
14*
!PJ
h tt p: lío nserni, co m
5

177
2N3903, 2N39042N3903 Ii * Profafrfd Dovica
General PurposeTransistorsNPN Silicon
Features
• EHj-Fr«i Packi May be Avaílabfc. Th¿ G-SuIHx DüfioWS aPb-Frct; Ltía<í Finish
MÁXIMUM RATINGS
RatíiHj
Callectar-Emltta- Vdtage
Collector "Base Valtaga
Emitfer-Base \otaqe
Caíeclcr Current - Ccndnuous
fetal Devlaa DssJpallonQ TA = 25rCDsrate abave 25X:
Total Devic« Dssípatfan@rc=2SrcD«rcíaabQve25'C
Operad!^ and Skrage JuncticnTaripe-aliire Ranga
SymixJ
VÍ^Q
Vceo
V^a
Ic
PD
Pn
Tj.Tt[Q
Valué
40
60
6.0
200
S255.0
1.512
-55 to4-150
Unll
Vtíc
Vdc
Vdc
mAdc
mWmw/x:
WmWAC
ec
THERMAL CHARACTERIST1CS {Noíe 1)
Ch ar»ctsftst*c
TnernialRasIsbncfl,Ju nction -Ío-Mi b len t
Themal Resístanos,Ju nction -to-Case
Symíxjl
ROJA
Raje
Max
200
83.3
Un|t
eGW
"CW
1. IndlcatesDatalnaíídlttcnto JEDECRequiretnaits.
Toradííüonaí informatfanoriíxi'Ri-Freasl-alaqyancfso'derinqdeíaíts, deasadowntoad (he ON Sernloinductor Saldarha and MounÜng Tecíiniques Refer-ence NUnUal, SOLDERRW/D.
OH Swrfcwductoc'nsemf.com
TO-9ZCASE 39STY1-E1
MARKWG DIAGRAMS
ORDERING INFORfAATlON
D«VÍC8
2N3W3
2N3903RLRW
2N3904-
2N3904RLRA
2N3904RLRE
2N3304F5LRM
2N39Q4R.RMG
2N3»MFíLRP
2N3904R-1
2N39042L1
Packaje
TO-92
TO-92
TO-92
TO-92
TO-92
TO-92
TO-92
TO-92
TO-92
TO-92
Síilpplngt
5003 Urtts/Box
2000/Mmo PacK
5000 UnlteEox
2000/raps S Re€Í
2000/Tap9 S Red
2COO/Animo Pack
2000/Amma Pack
2«XV/VTi7TO Pack
2OOO/Tap3 i Raeí
200C«jnmo Pack
tForlmünnaÜonon tapa and reeí spaciflcalíais,Indudina part crientaüan and tape sizes, p|eas6f afer to oír Tape and Red Pockáa'n'a SpedncaüonsBrocíure.BRDQQIÍ/Q
Prafwr»d do«><»a aro rooammoodsd Jioíoas forfutuna ua»and bastawil valu«.
aniÉwr, 2003 - R«v,PubícaiJcn CrderNurrtiar:
2K3903/D

2N3903, 2N39G4
178
charactefistic Syiubol Mn Max Unlt
OFF CH ARACTERISTICS
Calador -Emltíer Eraakdawi VdUigeíNofa 2) (lc = 1.0 mAdc IB =0)
Caíecíor-Basa BreaRdo-Mi Vdtags {lc = 1Q jiAdc, Ie = 0)
Emittef-BaseBreakíkr*Ti U3ltage (IE = 10 [lAvlc. =0)
Basa CUfcCf Current 0/cg = 30 VdG, VEB = 3.0 Vdc)
Callacinr CutáT Currant (VCE = 30 Vdc. V^ = 3.0 Vdc)
V(PRKEQ
Vipñ)c&3
V(BR1EEO
feu'cex
40
60
6.0
-
-
-
-
-
50
50
Vdc
VdcVdc
nAdc
nAdc
ON CHARACTERISTICS
OCCurrentGdn(Note2)(!c =0.1 mAdc, VCH = 1.0 Vdc) 2N3903
2N29G4-<lc = 1.0 mAdc. V^ = 1 .0 Vdc) 2N39Q3
2N3904(lc = 10 mAdc. Vcg = 1.0 Vdc) 2N3903
2N3904(!c = 50 niAdc, Ves = 1.0 Vdc) 2N3903
2N3904(lc = 100 mAdc. Vce - 1 -0 Ucfc) 2N3903
2N3904
Colectar -Emitíar Saluraüon Voltaga (Note 2)(le = 10 mAdc. IB 1.0 mAdc)(lc = 50 mAdc, IB - 5,0 mAdc
Basa -Emltter Saturado! VdtageíNoía 2)(lc = 10 niAdc. IB - 1.0 mAdc)(IG = 50 mAdc. l& = 50 mAdc)
VcetM.,
VBE<"CI
204035705010030601530
-
Q.65
150300
0.20.3
O.S50.95
Vdc
Vdc
SMALL-StGUAL CHARACTErasDCS
Currait-Gah - Baid'MdOi Product{!c = 10 rnAdc, Vcg = 20 Vdc. f = 100 MHz] 2N39O3
2N3904-
Oulpat Cafwcitanca (V^ = 5.0 Vdc, \ = 0. f = 1.0 MHz)
IrputCspaciEaica (VEB - 0-5 Vdc, lc = 0. ! = 1.0 WKz)
InpJtlmpedance<lc = 1.0 mAdc. V^ = 1 0 Vdc. f = 1.0 KHz) 2N3903
2N3904-
Vdtafle Faedback Rada{le = 1.0 mAdc, Vcg = 10 Vííc, f = 1.0 kHz) 2N39Q3
2N3904
SmaJI-Sígnal CurreníGah(lc = 1.0 mAdc. Ves = 10 Vdc. f = 1.0 XHzJ 2N3903
2N3904
Ouíput Admlttance (lc = 1.0 mAdc, VCE = 10 Vdc.f= l.OkHz)
Nolse Figure{lc = 100iiAdclVce = 5.0Vdclf:ía=1.0ICil,f=1.0fcHz) 2N3903
2N3904-
fr
C(rt»
ca>o
^
Ir.
*.
fo.
NF
250300
-
-
1.01.0
0.10.5
50100
1,0
_
:4.0
9.0
8.010
5.0a.o
200400
40
fl.O5.0
WHz
PF
PF
kíí
xio-<
lunhos
08
SWITCHING CHARACTERISTICS
Dalay Tima
RJseime
Storage Tima
FaHTTme
(Vce = 3.0 Vdc, VBS = 0.5 Vdc,lc - 10 mAdc, |B1 = i.o mAdc)
(Vcc=3.0Vüc,|c = lOrnAdcl 2N3903]BI~\BZ- \JOmMci 2N3904-
Id
tr
U
ff
-
-
-
-
35
35
175200
50
ns
ra
ns
rts
2. FVílsa Test Rilsa WdOi S 300 [ts; Duíy Cyde 2 ,
http:ffonserni.com2

2N3903, 2N3904
179
Dl/TYCrCtE-2* tt <l]<5COtiA—«H
DWYCTCIE-2*
-as v-
-5.1 V
i" Cs<-(pF*
" Total shunt capadtaice af test jl^ and connectors
Figura 1- D«lay and Risa-TimaEquivalent Ta*t Circuit
Figure 2. Storage nnd Fall TimeEquivalen! Tesí. Circuit
2N3903, 2N3904
TYPÍCAL TRAN SJ ENT CH ARACTERISTICS
180
w
7.0
£5.0
•<g 3.023
2.0
1.00
SCO
1
1 — TTT
-^X.
TT1 — I — '
I cwi r
c»<, ^-4•••^^
5000
3000
2000
£ 1000g TOO
? aro
Cf 300200
wo70
l_l L_LJ Ll-J ! 1— ) ....1.1.1.Ü L_J 1— 1 sfl0.2 0.3 0.5 0.7 1.0 2.0 10 S.O 7.fl W 20 30 -W
fl£V013E BAS VfXWGE (VDLTSf
Figuro 3, CapacjLance
- N_.\rv1 1 1
ICÍ Bi
vb
— -
1.0
x;*JF.
=*
*ovW
-—
I —
— -
~-17
í^J\#& 1
UA
rL-
1—
í'«f
...__
/|
4
2.0 10 5.0 7.0 10 2fl 30 50 70 HJfl a
fe. COLl£CTCR CWfiEHT £M)
Figure 4, Charge Data
ÍVN^
i iv
i u i^.4flV~
300
100
_ 70
-E- 50
SF= 30
10
7
^\rvLNNX. ÍX\s
"X
\XNNS^?-•s.
xt
I
k^í:<j_ .'K
v r _ .
TV
. N
: — *^
sV,
•<
.spX k
Icfc-» _
::[email protected]'IS
,-"
**
-s
— iíl-yl" 1SV~
2.0 3.0 5.0 7.0 10 20 X 50 70 100
]c COLiECTDRCURflfKT MI
Figuro 5. Tum-On Time
-Z- 1M
•*• 70
g 50nr
m7
NS
^ - Ks^
:hKV*¿ *-
VrrM
.4flV,M _
^,*>
1,0 2.0 3.D S;Q 7.010 20 30 SD 70 100 2DO
le, CCKiECTOR OJRREKT M
FígureS, RííeTinve
Figure 7. Storagc T¡m«
1.0 2£ 3Ü 5.0 7.0 10 a 30 5ü 70 100 200
le. CCaiECTOR OÍRREKT (pA,
Figure 8. Fall Tíme
http:í/ans«mi,com4

181
2N3903, 2N39Q4
TYPICAL AUDIO SMALL-SIGNAL CHARACTERISTICSNOISE FIGURE VARIATIONS
(VCE= 5.0 Vdc, TA=25:C, Baridv/idth = 1.0 Hz)
T—i—¡—r- f*1.0kHz
0.1 Ü.2 0.4 1.0 2.0 -4.0 MI 20 -10 WO
f, FREOUENCY (tHzJ
Figura 9.
0.1 0.2 0.4 1.0 ÍO 4J1 W 20 4) 100
RS, SOWCE R£S!STTXHCe{KOHr«|
Figure 10.
h PARAMETERS(VCE = 1 0 Vdc, í = 1.0 kHz. TA = 25:C)
CUfift
ENTG
UN
- 70
50
300
20
CT 1fl
§ 2.02
\o
tt20
—
-"- ... — • — •^— •s^
.1 tt2 13 0.5 1J3 2.0 3.0 £Q
le. COtiSCTORCUftRSfT (fr*J
Figure 11. Current Gaín
"^
^J_?», =lNjp
•Ns."N
N5
,1 0.2 0,3 as 1.0 zo 10 5JJlo couECTORCURfieor Mj
FígUre 13, Inputlrnpftdnnc*
wo•a-
Í 50
1P
1 10
3 Sa —
.*—
^^- *~
,'
j*
-h'
« ai 02 oj as 1.0 zo 3.0 5JJ 1le. 03 li£CTQR CÍJRPEfíT (trv^
Fígür* 12.Ouíput Admiítanc»
E 7.0
1¡ti °
a li-°H *s a?
-\-
\
k-\ "*^
/ "-
1C 0.1 02 Q.3 05 1.0 ÍO 10 SjQ[c.CaU_ECTORCJJRflEMT((M[
Figura 14, Voltage Fs*<íback Raijo
/
1
http;//onsemi.com5

182
2N3903, 2N3904
TYPICAL STATIC CHARACTERISTICS
Figure 15, DC CurrentGain
3 0.8
£ 0,6
g w
8 °-z
£ 0
lc -Un*
^ •—--
1) "HJrrA
1•^^ — " •-
30 iM
\.••«
L1 monA
V\=
J *
•-
2S1
1C -
0.01 a02 0.03 0,05 0.07 0,1 0.2 0.3 O.S 0.7 1.0
Figure 16. Co[|ector Saturatíon Región
2.0 3-fl 5.0 7.0 10
1.0 2.0 SS 10 20 50 100 2ÜO
!D cooarroR OJRRENT H4
Rgur» 1T. "ON" Vt>ltag«&
O 20 ífl 60 80 100 120 Hfl Wfl 19fl 200
lo COULECTORCURñSfT^r^
Rgure 18, Temfwatur» Ccufficiants
http://onsemi.com6

183
2N3903, 2N3904
PACKAGEDIMENSIONS
TO-92TO-226AACASE 29-11
ISSUEAL
SECHQM X-X
i,Yf-UU.|«2.
i CCWnoU*Ottl*>«X;WCH.i axrcunoffítaxüceenxcDwDi
siwcDtmKXun.t, LE>BD«B<so«f*L»icQ«noU£o«< r
u*1
MCHIS«M
acw9.1»091(
W«
asi;9J«
9JM
ÍÍW.
Olí)
Í-W
MJC
míotía7-C171
ion
— ,—
O-KB
p
«U»CTP»«M
>V3.1»
*«r1.11Í.O3-a
¡JJ*€J*?W— ,
'í*)0
MX
5 «í-l*
?4W!J»7»fi1 ti
——J«;M
—
f« [, EMTTtHz MÍ£i COUfCTDfl
sm£N:MI. EMirTEfli cotucrwX BAfi€
h ttp; ffonswmí, co m7

184
Absolute Máximum Ratings
Pararneíer
Input Voltage (far VQ = 5V to 18V)(fbrVo = 24V)
Therrnal ResístanceJunctíon-Cases
Therrnai ResisíanceJunction-Alr
Operaüng Ternperature Ranae {MC7aXXCT;LM78XXCr/MC73XXCDT)
Storage Temperatura Range
Symbol
ViV|
ROJCROJATOPR
TSTG
Valué
3540
5
65
0 - -t-125
-65--M50
Unlt
VV
°CAV
°CAV
°c°c
Eléctrica! Characteristics (MC7805/LM7805)
paríunetef
GutputVoftage
Une Regulation
Load Regulador]
Qulescent Current
Qulescenf Current Change
OutputVoltageDrift
OutputNoIse Valtage
Rippie RejecHon
Dropaut Valtage
OutputResIsíance
Shart Circuit Current
Peak Current
Symbo!
Vo
AVo
AVO
IQ
AlQ
AVO'AT
VN
RR
Vo
RoIscIPK
Condltíons
Tj=i-250C
5.0mA ¿ lo ¿V| = TV to 20VV| = SV to 20V
Tj~+25 °C
TJ=-*-25 °C
Tj=-f-25°C
I.OA.PO ¿ 15W
VO = TV to 25Vvi = avtoi2vIO = 5.0mAÍDl.5A
lO =250fTlA to750ínA
IO = 5mAto1.0A
V|=7Vto25V
lo=5mA
f = 1 0Hz ÍQ 1 0OKHz, TA=*-25 °C
f=120HzVo = avbiavlo = 1A, Tj =^-25°C
f=1KHzV| = 35V,TA=-t-25°C
TJ=-í-25°C
MC75a5/LM7805
Mln.4-.8
4.75
-
-
-
-
-
-_
-
-
52
-
-
-
-
Typ.5.0
5.0
4.0
1.6
9
4
5.0
0.030.3
-0.8
42
73
215
230
2.2
Max.
5.2
5.25
100
50100
50
8
0,5
1.3.
-
-
-
-
-
-
Unit
V
mv
mV
mA
mA
rnV/°C
ViV
dB
V
mQmAA
Load and Une reguktion. are specífied at constantjurtcíían. taüpcraturt. Changas in Va due txi beating eflects rntist be faken.[oto accountsepaíaíely. Pulse testíng 'wíth low duty ls iis«d.

Typical Perfomance Characteristícs
185
A
Fígur« i, Ouroscurrt Curronf
3 j -i£
TV- 23 "O
/
1
^\
N\
\a 2. Pcak Output Currwí
-M o » ao n toa
i !***«*ÍTUU. rq
Rgura 3. Output Voííage
I .
3 «
Figura 4. Quíoscorrt Curr«nt
10
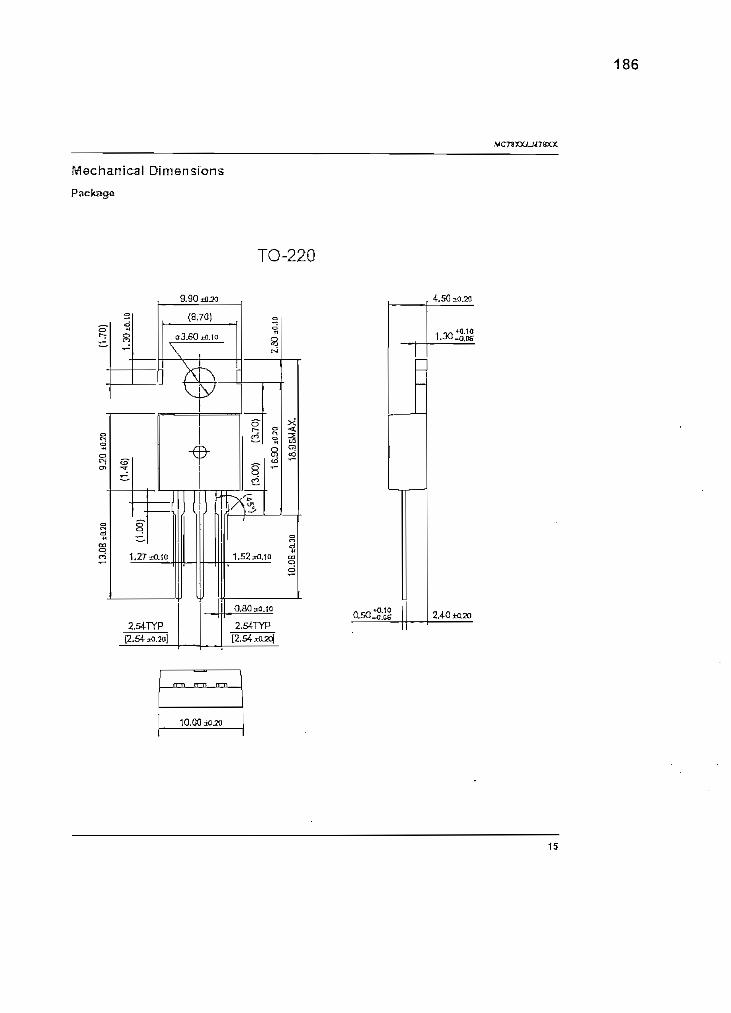
186
MC78XXLH7SXX
Mechanical Dimensíons
Pacitage
TO-220
9.90 rfjw 4.5Q =0.20
2.40 KL3D
10.00 io 20
15

187
MC7SÍXLH7SXX
Orderíng Information
Producí Number
LM7805CT
OutputVbltagfi- Tolerante
±4%PacKaac
TO-220
Operatíng Temperatura
0~-t-í25«C
Producí N:umber
MCT8C5CT
MC7806CT
MC7808CTMC7809CT
MC7812CT
WC7815CTWC7918CT
WC7824CT
MC7a09GDT
Qutput Vbltage- Tolerante
M%
Packa^e
TO-220
D-PAK
Qperatlng Tamperafure
0~-H125°G

188
ON Semiconductor®
Plástic Médium- PowerComplementary Silicon Transistors
. . . desíynocí Ibr y,cfKnií-pt!rpaSe ampíífíer and low-spocd
swilchin¿í applications.
[[¡ufiDCCurreniGain —
•- 4.0 Adc
CoIltíctor-línifUtírñufíafnfng Valtouo — (a; lOflniAclc
- 80 Vdc(Min) — TIIM2I,TtPI2fi
=• 1 00 Vdc(Min) — TIPI22.T1IM27
LowCo[ItiCtor-I£mít£«¡r Saturación Voliag-: —
l) ~ 2.0 Vdc (Max) (tf> \ = -"¡-0 Atlc= 4.0 Vdc (Max) 6U le = 5M Adc
• Monolilhíc Conslructian wíth Built-In liasü-EmiUcr Shunt Resistan»
• TO-220AI3 Compact Packagc
'MÁXIMUM RAT1NGS
TI P121*
TI P122*PNP
TIP125*
TIP126*
TI P127*"OH 5
DARUNGTON5 AMPERE
COMPLEMENTARY SIUCONPOWER TRANS13TORS
60-80-1 oo VOLTS55 WATTS
RaBiH)
Coíecíar-EiniÜerVollaqa .
CoKacfar-Sasa Vdtsqe
Emitter-Base Uiltajs
Coledor Current — CarthuousPeak
Bas« Currait
Total Pawe-OlssJpaUon ffl rc = 25lCBarate abova 25 -C
Total Power Dtsdpabon ®TA=2S*CD^raía abova 2S"C
Undarnpeí InducÜveLoad Enaroyd)
OpefatJnq and Skrage Junctfan,TernpírafaJra Randa
Synitoot
VCEOVCHVEBte
IBPD
PD
E
Tj. Tsfia
T1P120, TIP121.TIP125 TIP12S
so ao60 80
TIP122,T1P127
100
ICO
5.0
5,0a.o120
650.52
2.00.016
50
-GSttH-ISO
unltv<3cVdc
Vdc
Adc
mAdc
WattsW/-C
Wattsw/-cmJ•c
THERMAL CBARACTERIST1CS
Characlertstlc
Tha~ma[ Raslstanca, Junctícn b Casa
Thernul Reslstanca. Juncítai to Artíent
Syrttbol
ROJCROJA
Mu
1.92
62.5
untt•cw•ow
(1) IC = 1
ti S*<nlcniikianrCaTipon«nO'bdui»i«*,LLC,3«nAprlI,20O2-R»V, 5
Putíteatlcn Order Number;

$
'.'A
189
T1P120TÍP121 TIP122T1P125TIP126TIP127
er
O 2D ^0 80 ICO IZO 140 160
Figure 1, Power D-eratmg
http:ffonsemi.com2
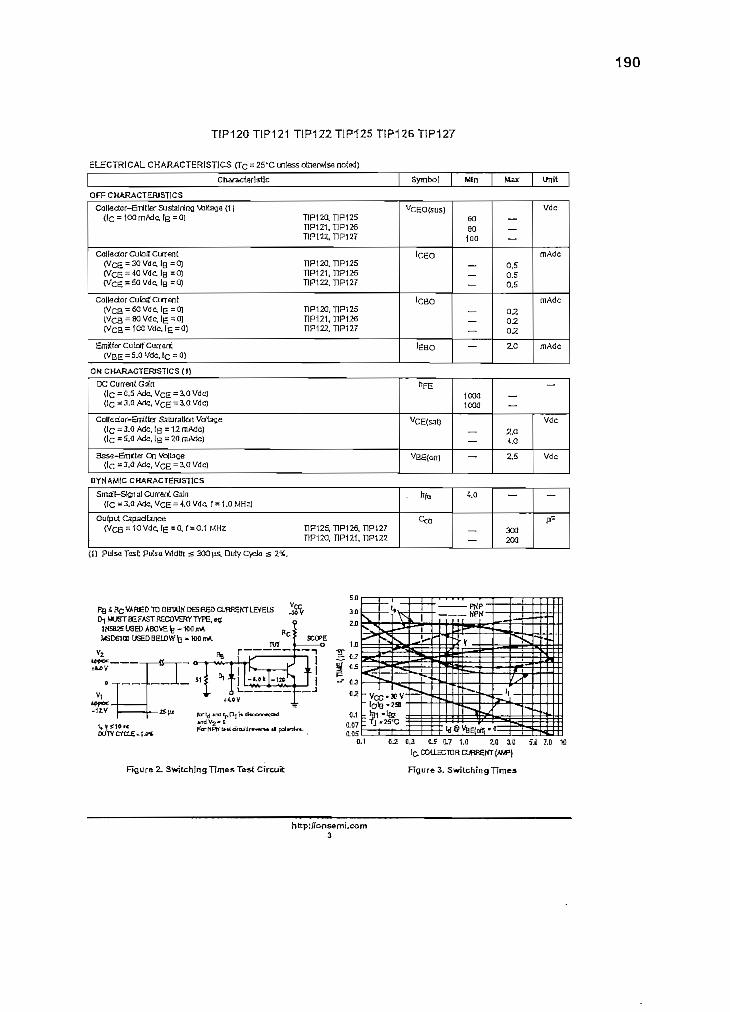
TEP120T1P121 T1P122T1P125TIP126TIP127
190
ELHCTRICAL CHARACTER1STICS (ÍC = 25'C unlessc
Clwacterlstíc Symbol Win Max
OFF CHARACTEW5T1CS
Collectaf-aTÍtter SusíalnfoQ Ualtaqe Í1 )ÍIC = lOOmíVlG, IB =0] TIP120, TIP125
T1P121.T1P12ST1P122. T1P127
ColladorCulalf Current(VcE = 30 Vdc, ]g = 0] TIP120, T1P125(VCE = 4Q Vdc- 'B =0) T1P121.T1P12S{VcE = 50 Vdc, IB = Q¡ T1P122. T1P127
CalladarCutorfCurrent0/Ca = GQ Vdc, IE =0] TIP120, T1P125(Vea = 8° Vdc, lE =Q) TIP121, T1P126(VcB = 10QWc,]£=C) TIP122. TIP12r
EmíferCutcíFCurrentO/BE = 5-° Vdc- >C = °í
vCEQ(sus)
ICEO
'cao
IEBO
60
80toa
———
———
—
—
0.5Q.50.5
0.20.20.2
2.0
Vdc
raAdc
mAdc
mAdc
OH CKARACTERISTICS (1)
DCCurrentGánílc = Q.5 c. VCE = 3-° vdcJ<ic = a.c Adc, VCE = 3-° Vdct
Coltecíof-&TTÍtter SaliiraUai Voífageílc = 3.0 Aie. IB =12 raAdc)(|c = 5.0 Me, le = 20 mAdc)
Basa-Emiter On Voitage(|G = 3.0 Adc, VCE = s'° Vdcl
fiFE
vCEísat)
VBGían)
10001000
-
—
-
2.04.0
2.5
Vdc
Vdc
DYNAMIC CHARACTERISTICS
Smail-Slgnal Currarit GainÍIC =3.0 Adc, VCE = 4.0 Vdc, f = 1 .0 MHz)
Output Capad tanca(Vca = í°Vdc,lE=0, f = 0.1MH2 HP125.TIP12Q, T1P127
T1P120, TIP121.T1P122
. hfe
Ccü
4.0
,
—
30020CJ
—
PF
(11 Pulse Test Pulsa Wdlft * 30Cps, Duty Cycla
''i
He fi RC^REOTO OBWM DES RED OJWEKT LEVÉISD! MUST BEFAST PECOVERr'TYPE, ai1H5B2SUSS) ABOYE % -WüjM p
USD610DU^DBELOWlR-WfljíA í SCCPETUT +-n
Figure 2, Swilchlng Times Test Circuit
0.3 0.5 a? 1,0 2.0 ao sj 7.0 wIC- COLLECTOR CURfiEMT(AWP[
Figure 3, Svrilching Times
.r http://onsemi.com
3

191
T1P120TIP121 TIP122T1P125TIP126TIP127
Figura 4, Th«nnal Ráspense
] 2.0 3$ 5JJ 7.0 10 20 30 Sfl 70 100
Ves OXIECTOR-BJÍTTER VOU*GE(TOLTS)
Figure 5. Actrv*-RagÍorj Safa Op«rat¡ng Área
T!HTÜ nm [\VQ ümitalions on ihc powcc Iiandlínji abilíty nfa tmnsfítür: avorage junclíon k'nipcraliiro and &ecan<Ibroafvdown. Safe optvaíing área clines intlicato Ic - V'ct-líiníls or tlio iransiilor ihat musí (>; obí^rved Ibr rcííablüoponilion. i.«!., thtí minsisltir musí nal (x: suty'ccled ta greatordiá5Ípat¡on ihan llwcur^'cs indícale.
TÍK J:itaofFijiura 5 ís baldón Tj(pkl = l5Ü°C;Tcis\-ariabk depcndingon condil/ans. Socond bnxikdawn pulstílímíis are vaíid Tor tluiy cycles [o 10% pravidud Tj(pk)< I5íJ°C. Tj{pk] niay ^ caículattíií iraní th« dota. EnFigure -i. At hijúi ca&¡ [cmpwraturcü, tlwrnwl líniílalions will.rvduce ílw pov-'cr llul can Lx Iiandlcd Lo valúes Icss [lian líioÜmilau'cins ímpo^d hy secand hreatcdov^-n
5000
HWTI
WOO
SCO
100
SO
Tí
W
—
I
¡
-Te-"1V( p •
.3
r i i
. —
S'Cx,OV*
1
--
1 J^
s\^ V
-zí ;i,
SO 100 3)0
6. SmalI-Signal Curr*nt Gain
0.1 0^ 0.5 1.0 Ifl 5.0 M M SO WO
Vft REVERSE VOLTAGE (WtTS?
Figure 7, Capacitancia
h ttp ;/A

T1P120TIP121 T1P122TIP125TIP126TIP127
MPNT1P120,TIP1Z1,T1P122
PNPTIP125.TIP126.TÍP127
20JDOO
Mí»
3 aw§ 3000§ ajOQ
yH 1000(Utu
SCO
300
?on
:TJ
^
X
.150'C,1
7
— ;
=
X
*<•
írc.^1 -*T/!c^-55'f¿
^
,'*
±^=
_^"'
^
^
^
1
ce-
^
i
— i4.
\i
rrv
,>
1
V» =
20.000
g SOM
y: _ 1COO
MIU
3)0
'T j -
^
¿=
X
ISfi'C,,
4a1^
-^— -s'c -r
L-'x^
.x-1
p
>
•*
T.*i-t-U
111
t=
3- "
^**
""*<
ce-
^
X. V
X
f-i
f-(-:i 1
az &3 as 0.7 1.0 zjj 10 sss 7,0 101 c. CO U_BmD ft OJBflEMT (AMP |
0.1 0.2 0.3 aS a? 1H 2.D 3JO £0 7.0 W
t CQliECTDR CUflRefT (AMPj
Figur» 8, DC Currsnt Gain
192
3.0 10 7.0 10 20 X "0.3 a5 0.7 1JJ ZO 3J3 5.0 7.0
Figure 9. Collector Saturatíon Región
0.2 0.3 Q5 a? 1,0 20 3.0 5.0 7.D 10 0.2 0-3 05 a? 1.0 Z.O 3.0 S,Q T.D 10
t. COLiHCTCR OfflRBfT (AMF^
Figure 10, "On" Voltage»
h ttp: /fons« mi. com5

TG-220ABCASE 221A-Q9
ISSUEAA
193
XOTH3:1. n»«
VI-UM.1W-
2. CtXtECTOflO. EWTTFfi4. oxircrofl
h tt p: ffonse rní, co me

ANEXO 2
TABLAS DE ELEMENTOS NEUMÁTICOS
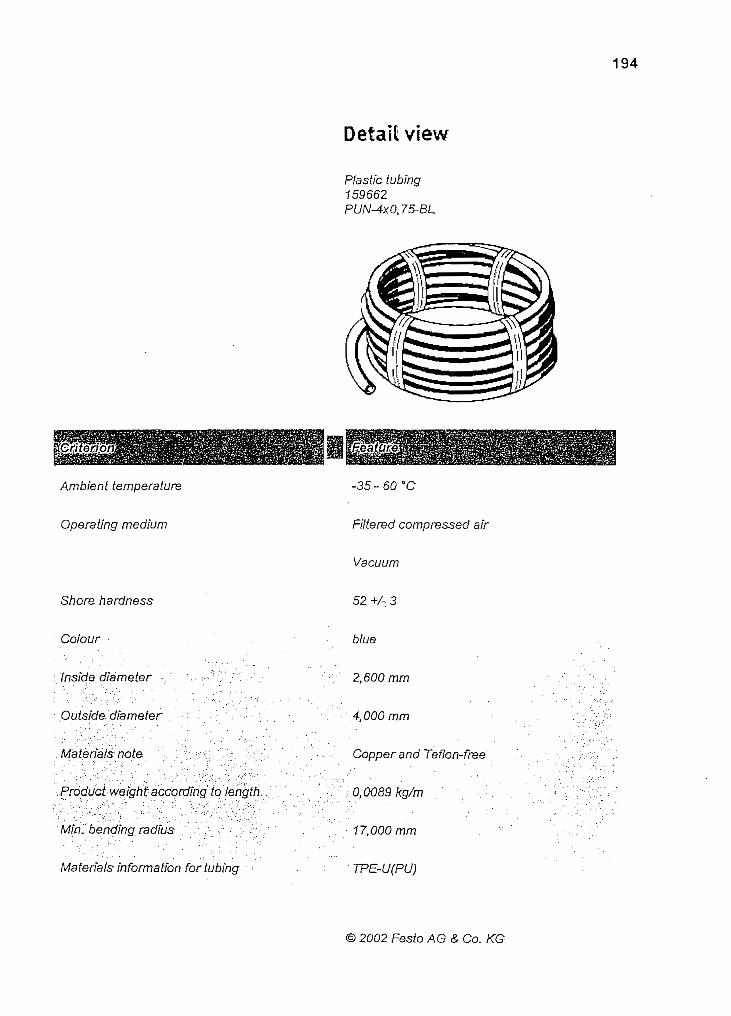
194
Ambient temperatura
Operating médium
Shore hardness
Colour
Insíde di'ameter
Qutsfde. dismeter
Materials note
Product weight according to length
Mln¿ bending radías
Materials- ínformatíon fortubing
Detall! view
Plástic tubing159662PUN-4XOJ5-BL
-35-60 °C
FUtered compressed air
Vacuum
52 +A 3
blue
2,600 mm
4,000 mm
Copperand Teflon-freé
0,0089 kg/m :
17,000 mm
TPE-U(PU)
© 2002 Festo AG & Co. KG
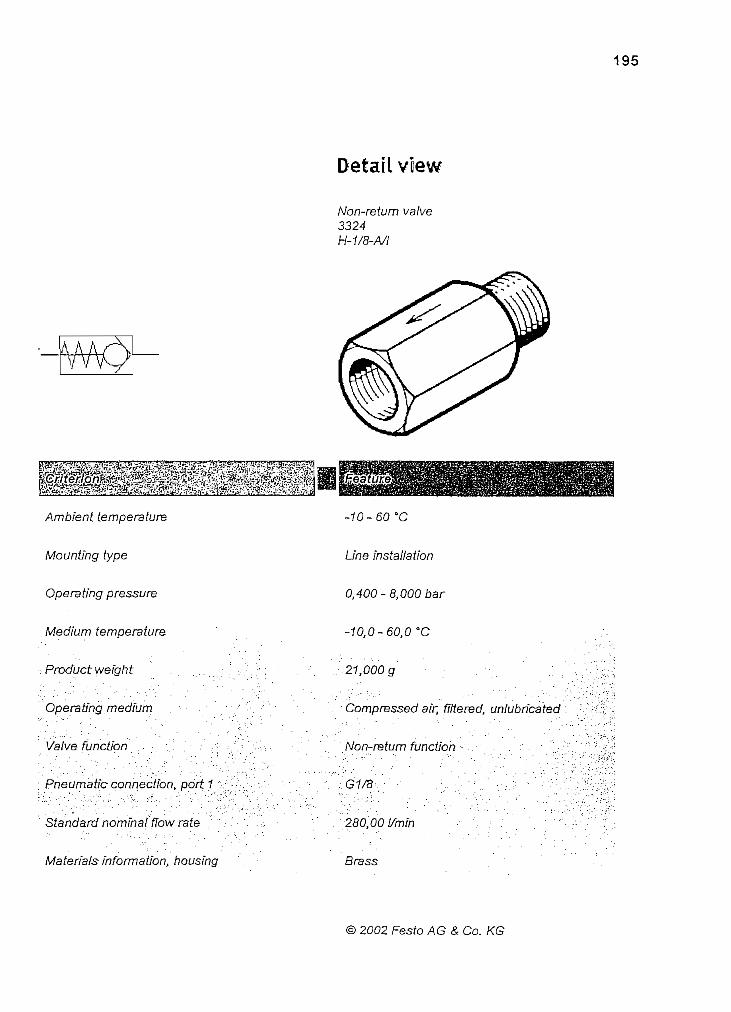
195
Detall view
Non-retum valve3324H-1/8-A/I
Ambfent temperature
Mounting type
Operatíng pressure
Médium temperatura
Prod'uct weight
Operatíng médium
Valve functíon
Pneumatícconnection, port 1
Standard nominal fíow rate
Mataríais Information, housing
-10~60°C
Une installation
0,400 - 8,000 bar
-10,0-60,0 °C
21,000 g
Compressed air, filtered, unfubrícated
Non-retum function
G1/8
280,00 l/min
Brass
© 2002 Fesfo AG & Co. KG

Detaíl view
Qufck connector3563CK-1/8-PK-3
196
Pneumatíc connection G1/8
Corrosión resístance cfassification CRC
PK-3 with unhn nut
Assembly positíon
Nomina! size
Type ofseal.on screw-in stud Seaüng ring
Materials note Copper and Teflon-free
•• Materials- Information, housing. AJuminium
© 2002 Festo AG & Co. KG

197
Detaft víew
Quick connector5664ACK-1/8-PK-3
Pneumatic connectlon
Assembly positton
Nominal s/ze
.Type ofseal on screw-ih .stud
Materials note
Materials Information, houstng
G1/8
PK-3 wíth unión nut
Any
2,400 mm
Seaiing ring
Copperand Teflon-free
Aluminium
© 2002 Festo AG & Co. KG

198
Detaíl view
T distributor6273FCK-3-PK-3-KU
Pneumatic connection PK-3 wtth unión nut
: Assembiy positíon Any
Operating pressure 0,000 -10,000 bar
Nominal sfze 2,400 mm
Materials note Copperand Tefíon-free
Materiafe ¡nformation, hoüsing POM
© 2002 Pesio AG & Co. KG

ANEXO 3
DIAGRAMA DE FLUJO PAÍRA EL CONTROL DEL
SISTEMA DE FUERZA

DIAGRAMAS DE FLUJO
199

N013VIM >J vS3* vara
dDIQO QDIJISDQ
S3ÜOJDH sm 3Q3HJ VT 30
002
ANEXO 4
PLACAS DEL CIRCUITO DE CONTROL

(*
Q —i i.3.
JGÍ
. Cía
1 III
1 III
1 1
1 1 I
o c:
H
.*£
'[
ía
«,II I I I I I II
• i I 1
I 1
i II

202
E?
M
w
C a
DH
=3
CT
¡• •
• _^- a
•
M D
I O
ÍD
cg
• D-
H c?
3 c
j 03
-
*'"
;*
oeoe
rs
api
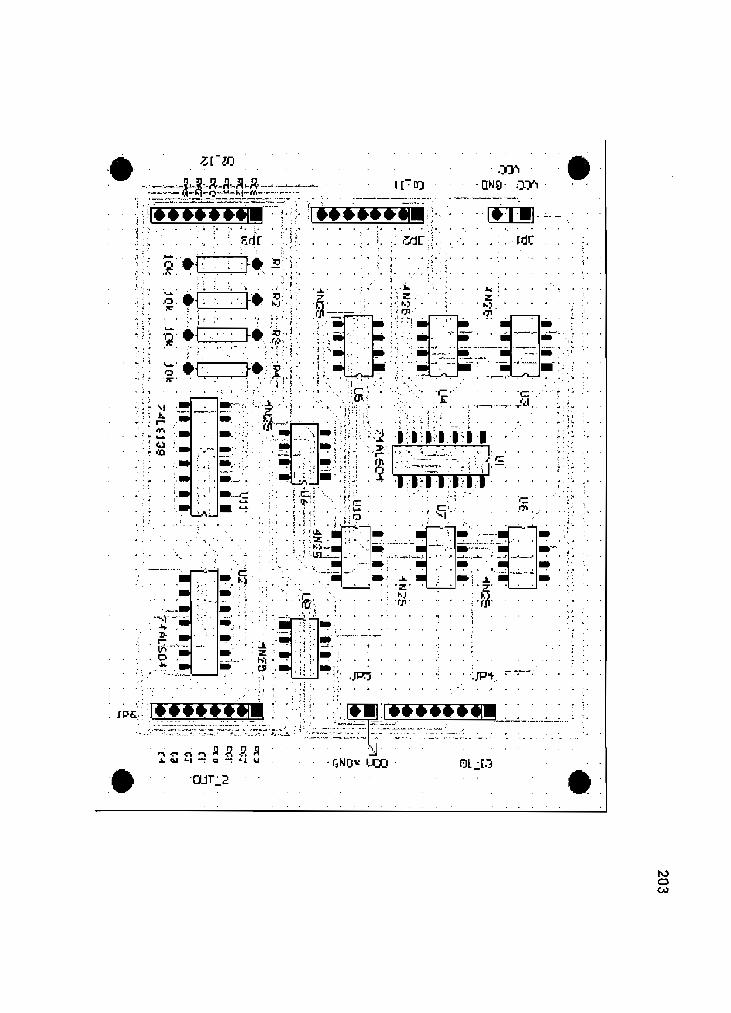
(9
eo
s ~í'
l~?
flla
w
.lía
• lililí
l[l
1 I
I 1
1
lili 1
I II I
1 I III
1 l'|
r • iii
4 , -*
• i n
ú;I
I I1
1II II
i-N
i! f i |íí£
lifr
1
3
1 .
i j
i
$ • s H
-. .-,.
.. ..
^
53
1
.j í '
t
f ;
j /n
^
i '[
!!'
.1^
••
'i ¡
—.lili.!1
.!.
. .
..
í. t
. 1
.1
1 sn
• •
• •
i] i * — .-,_ m
.
^ r
¡í
i
• •
-i • !
ii •
••.
. ^
. i
i j
j .
• •
-£n
f
í i
- •3
ÍN*
""•—
- -
- •
-
d,
. .
; ri .
•r—
a
^j;
^ Q
^ í
5H
'í
í "
eos
ANEXO 5
DISEÑO DE LAS PLACAS DEL CIRCUITO ÜÉ
CONtROL

uní
'tí
II I 9 13
1 í.
t—II
ni i f u
too

205
K&—
•—££
*• E
*—C
¿^*t.
T
ES -
t£7>
B
S= -- C
¿
EB
— -C
j"
B5S
tp-
E
S»
CP
_

1
Mg
*r- ¡s-
¡ ¡ -
- [bi«
ffl !üt •ffi
roo

ANEXO 6
DIMENSIONES DEL PROTOTIPO
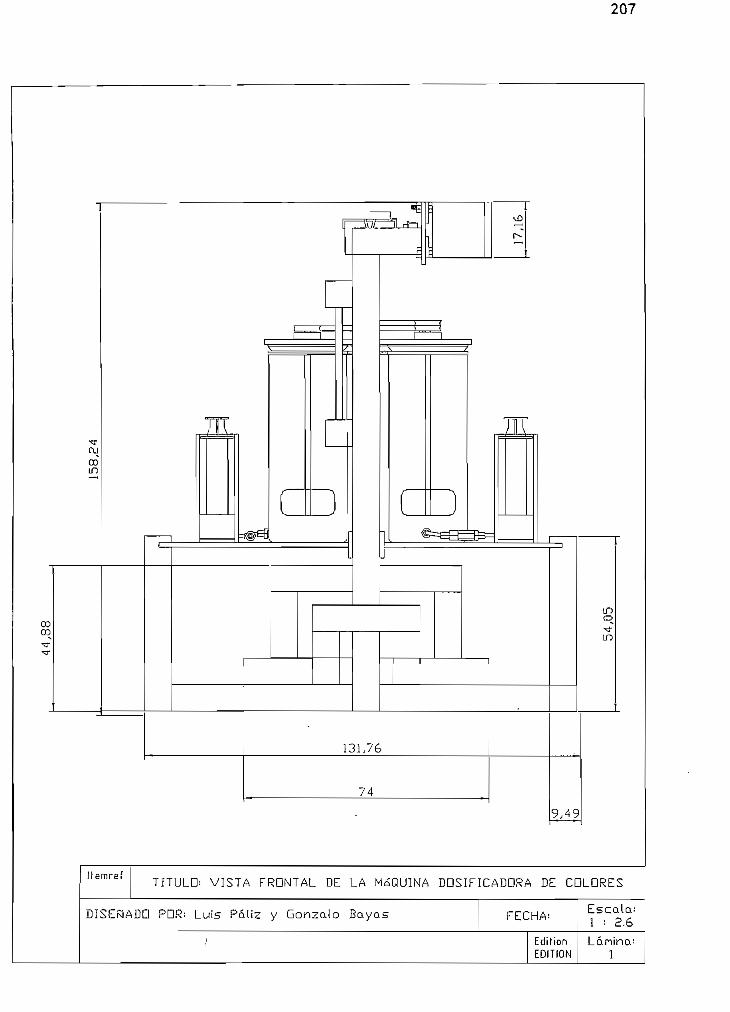
207
coco
1
131,76
74
9,49
IlemrefTÍTULO: VISTA FRDNTAL DE LA MÁQUINA DDSIFICADDRA DE COLORES
DISEÑADO POR: Luis Páliz y Gonzalo Bayas FECHA:Escala;1 : 2.6
EdrtionEDITION
Lánina:1
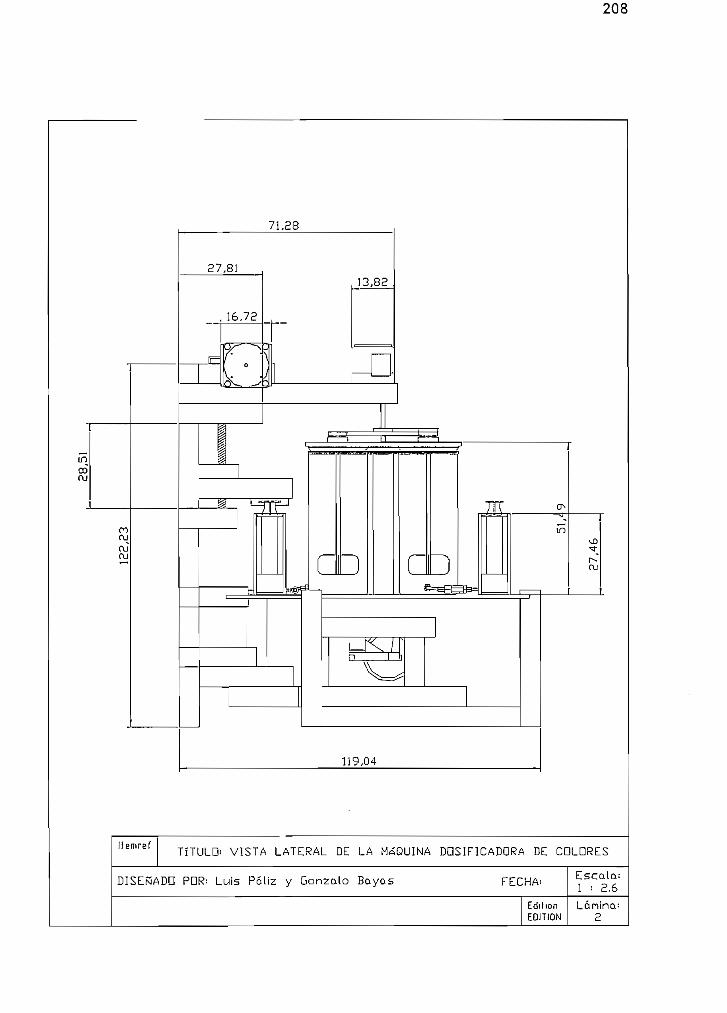
208
71,28
ü emref TÍTULO: VISTA LATERAL DE LA MAQUINA DGS1FICADGRA DE COLORES
DISEÑADO POR: Luis Póliz y Gonzalo Bayos FECHA: Escala;1 : 2.6
EdihonEDITION
Lánina:2
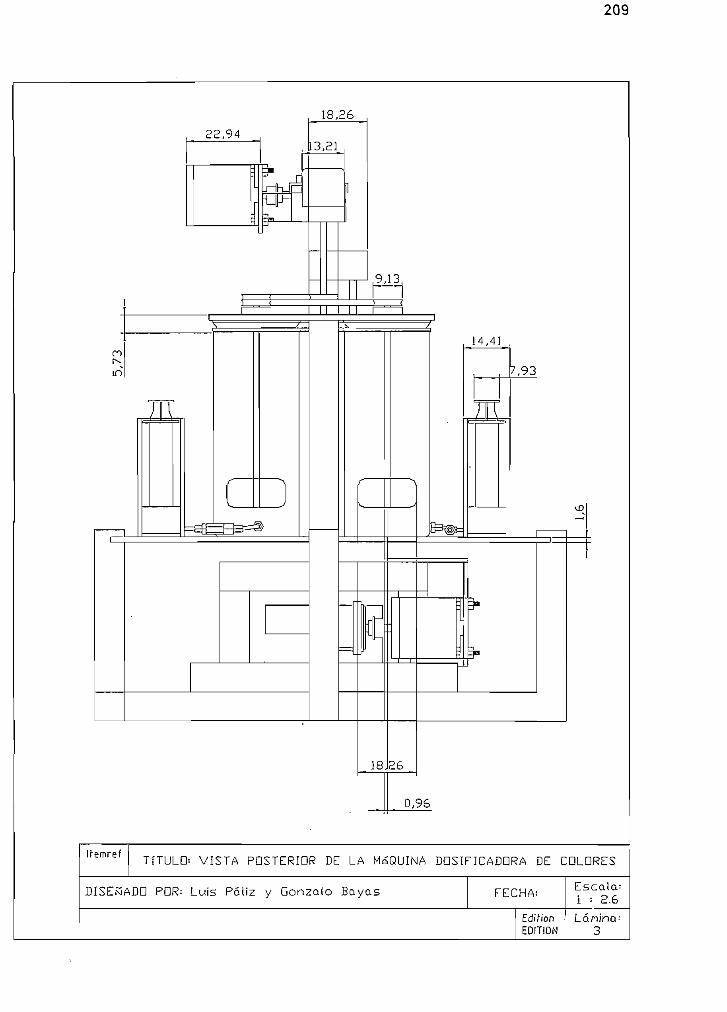
209
22,94
3a-
18,26
Í3,21
9 13ri
14,41
7,93
t
(
18 26
0,96
I f e m r e fTÍTULO: VISTA POSTERIOR DE LA MáQUINA DOSTFICADORA DE COLORES
DISEÑADO POR; Luis Páliz y Gonzalo Bayas FECHA: Escala:1 : 2.6
E di t ionE D I T I O N
La nina:3
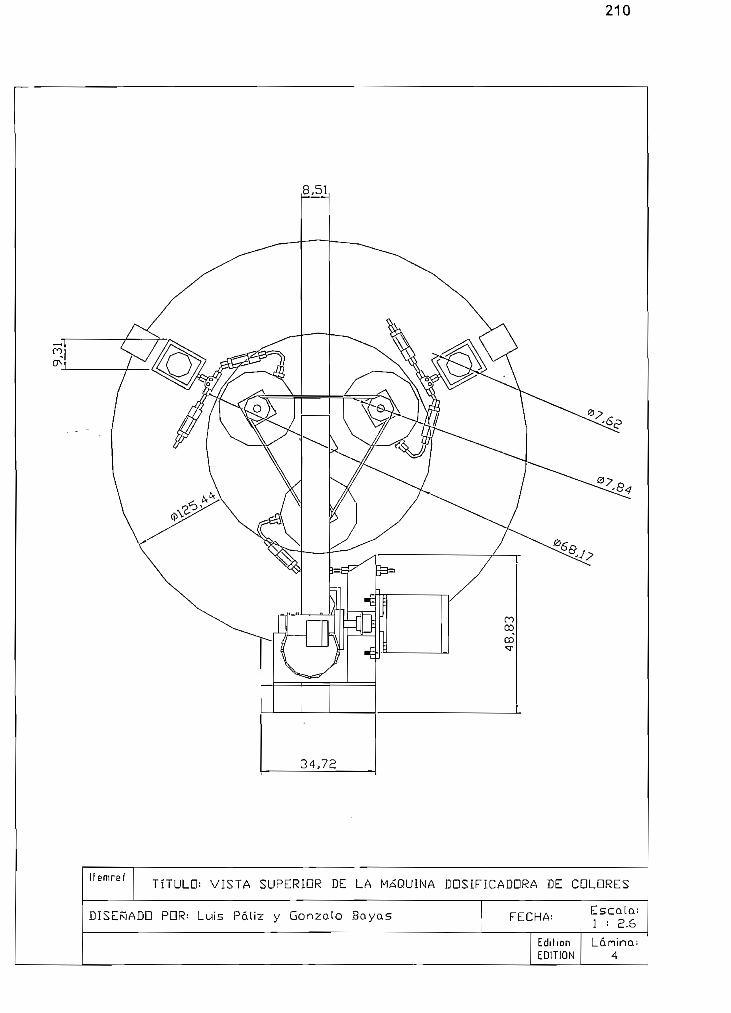
210
Ifemre fTíTULQ: VISTA SUPERIOR DE LA MÁQUINA DDSIFICADDRA DE CDLGRES
DISEÑADO POR: Luis Pótiz y Gonzalo Bayas FECHA: Escala:1 = 2.6Lánino.:
4
ANEXO 7
GLOSARIO

211
GLOSARIO
Acrílico: Dicho de una fibra o de un material plástico: Que se obtiene por
polimerización de! Ácido acrílico o de sus derivados.
Cable de alimentación: Cordón laminado con varios conductores aislados unos
de otros y protegida generalmente por una envoltura que reúna la flexibilidad y
resistencia necesarias al uso que este se destine.
Cilindro: Cuerpo limitado por una superficie cilindrica cerrada y dos planos
que la cortan.
Clavija: Pieza de material aislante con varillas metálicas que se introducen en las
hembrillas para establecer una conexión eléctrica.
Código: Combinación de signos que tiene un determinado valor dentro de un
sistema establecido.
Chumacera: Pieza de metal o Madera, con una muezca que descansa y gira
cualquier eje de maquinaria.
Densidad: Magnitud que expresa ia relación entre la masa y el volumen de un
cuerpo. Su unidad en el Sistema Internacional es el kilogramo por metro cúbico
(kg/m3).
Display: Dispositivo de ciertos aparatos electrónicos, como los teléfonos y las
calculadoras, destinada a !a representación visual de información.
Eje: Barra, varilla o pieza similar que atraviesa un cuerpo giratorio y le sirve de
sostén en el movimiento.
Embofó: Pieza que se mueve alternativamente en el interior de un cuerpo de
bomba o del cilindro de una máquina para enrarecer o comprimir un fluido o
recibir de él movimiento.

212
Enrarecer: Dilatar un cuerpo gaseoso haciéndolo menos denso.
Fusible: Hilo o chapa metálica, fácil de fundirse, que se coloca en algunas partes
de las instalaciones eléctricas, para que, cuando la corriente sea excesiva, la
interrumpa fundiéndose.
Homogéneo: Mecanismo que regula el flujo de la comunicación entre dos partes
de una máquina o sistema. Mecanismo que impide el retroceso de un fluido que
circula por un conducto.
Interruptor: Mecanismo destinado a interrumpir o establecer un circuito eléctrico.
Pantón: Tabla en donde se encuentra un conjunto de colores.
Piñón: Rueda pequeña y dentada que engrana con otra mayor en una máquina.
Pistón: Cilindro delgado donde se encuentra el émbolo.
Tomacorriente: En instalaciones eléctricas, dispositivo donde se inserta la
clavija.
Válvula: Mecanismo que regula el flujo de la comunicación entre dos partes de
una máquina o sistema. Mecanismo que impide el retroceso de un fluido que
circula por un conducto.
Viscosidad: Propiedad de los fluidos que caracteriza su resistencia a fluir, debida
al rozamiento entre sus moléculas.
Volumen: Espacio ocupado por un cuerpo.
i
ANEXO 8
b
Copyright © 2022 FDOKUMEN




















