The Apparent “Paradox” in China’s Climate Policies (Asian Survey, 2012)

Sr'rrtal ,didr. Vol. 5, No.4, pp. 279 289 (1991)o vsP 1991.
Effects of adaptation to apparent movement on recovery ofstructure from motion
J. TIMOTHY PETERSIKDettadhe,t oJ Psfchalotr, RipM ColleEe, P.O. Rax 248, Ripan, W|54971, USA
Received 23 October 1990i evised 4 February l99li acepted I I February l99l
Absnrct Pasl work on the r.covery oltnree dinensiodl structure lron dynamic lso dimension, inageshas led to inconsistent mnclusions rcgarding the contnbutions of rhe shorl{ange and long range norionproes*s. ln tne present exp€rinenrs, subjmls adapled 1o disptays (eil!€r four lines or 50 randomlylosilioned pixck) whose spatiotenporal parameters wcrc chosn ro favor either th€ sho -ranBe orlong range prsess. Adaptalion periods were followed by rd displays rhar sinulared rhe rolarion of alou pixel randon objed aboul the vdtical r.ais. The dep€ndcnt measlre was ft€ angle of rotationbe1@n suce$ive arames of the rolation display at whicb pcrcepk ol three diddsioml struclure brokedown. Both lhe oiginal data and denved nasures basd on b6t-fit1ing polynonials showed snall butconsislent efltrls: Conparql to control co itions, adaptalion ro shorlknnsE norion reduced thc ansle atwhi.h percpts of shuclure broke downi adaplation 10 long rang€ notion increasd rhem It is suggesledurat borh lowlevel (i.e. shoit angt and high-ldel (long-range) processes contnbur to tne rrovery of
CONTIIBUTION OF SHORT- AND LONG.RANGD PROCESSES TO RECOVERY OFSTRUCTURE FROM MOTION
The kinetic depth effect (KDE; Wallach and O'Connell, 1953) can be produced whena two-dimensional (2D) image moves in a way that mimics the projection of lhemotion of an object in three-dimensional (3D) space. Under a broad range ofspatiotemporal pammeters ofimag€ motion and within certain limitations, observerscan correctly r€port the shape, dir€ction of motion, and stru€tural charactedstics (e.9.,depth relations) of the object whose motion is projected onto a 2D plane (e.g.,Braunstein, 1976). The process whereby structural ard depth relations are perceivedin 2D image motion is referred to as 'recovery of structure from motion'.
Intuitively, it makes sense td suggest that the early stages ofrccovery ofstructurefrom motion must include an analysis of the 2D image motion in the display. Sincemany of the displays used to create a KDE have been stroboscopic, some researchershave recenUy sought to determine the extent to which processes hypothesized !omediate apparentmotion (AM) also contribute to the KDE and recovery ofstructurefrom motion. For example, Petersik (1980) show€d observers simulations of spheresrotating in depth. Global information about the motion of a sphere was provided by5-60 pixels illuminated on the surface ofa CRT. Observersjudged both the rotationdir€ction and apparent depth of each spherc, and both stimulus duration and inter-stimulus inlerval (ISI) w€re varied as independent variabl€s. The data suggested tha!the process(es) that give(s) rise to lhe perception of structure and depth cannot bestrictly identifi€d with the short-range proc€ss (SRP)'in AM because the best evidenceavailable at the time suggested that the SRP had a relatively small. absolute spatialintegration .ange (<about 15 arcmin) and a relatively short maximum temporalinterval (<about 80ms). On the otherhand. observers olrherotation simulations were

280
able to match ihe moving pixels in order iojudge depth and rotation over spatiotem-poral €r(tents that excccded the assumed properties ol lhe SRP.
Since tlat time, a number of developments have forced a reinterpretation of thercsults of Pete^ik (1980). First, the SRP is no longer consideied to havc a small.absolule spalial integration rang€ (P€tersik €l d1., 1983; Baker and Braddick, 1985;Petersik, 1989). Secondly, it is known that the SRP exhibits global cooperativity(Chang and Julesz, 1984; Perersik, 1990), so tha! signals ffom a few elemenls under-going short-range motion can influence the pereption of other elements that may nolfall wirhin the usual spatial range of the SRP
In view of these developmenis, Petersik (1987) measured the angle of rotationbetween successive frames ofa simulation at which percepts ofstncture break down,and discovered that motion in depth was rarely perceived when the displacement ofelements on th€ midline ofthe sjmulated sphere exseeded about 33 arcnh. This ledto the suggcslion thal the SRP contributes to the recovery of struciure fiom motion.Mather (1989) has also recently addressed the issue of whether the SRP is importantto the recovery of structure from motion. Also using a simulation of a rotatingtransparcn t sphere asa stimulus, Mather demonstrated thatdeplhis reliably seen onlywith ISIS below 80ms. when the displacement of the majodty of picture elementsacross ftames is below 20 arcmin, and when viewiDg is monocular or binocular (butnoi whcn it is dichoptic). Mather concluded that KDE depends upon the oulpul ofthe SRP, but, as with Petersik (1987), such a conclusion may rot be unequivocal: Itis possible that the process ihal leads to a recovery of structure from motion is notat all related 1o the SRP, but does have sjmilar spatial ard temporal preferencesConvcrging evidence from diff€rent exp€rimental paradigms is needed.
The presert approach to determining the contribution of ihe SRP to the processmediating the KDE was to adapt the SRP and then obtain some measure of therecovery of structure in a 3D motion simulation. In addition, since there is somereason to believe that the long-range process (LRP) also contributes to the finalpercept in the XDE (e.g., Petenik, 1980; Dosher er a/., 1989), we also attempred toadapt rhe LRP b€fore obtaining measures of the recovery of structure in the 3Dmotion simuiation. Whereas the sho -range process is frequently characteriT-€d ashaving a relatively snall spatial integration range and to prcfer relatively shortstimulus durationsand lsls, the long-rangc process is characterized as havinga largerspnlial inlegration range and a longer maximum temporal int€rval (see Petersik, 1989)
As in Perersik (1980, 1987) and Mather (1989), the stimulus used in lhe presentexperiments to elicit the KDE was a stroboscopic simulation of a structued objectrotating in depth. The measure of the strength ofthe process mediating recovery ofstructure was the angle of rotation between successive frames at which percepts ofstruclure in depth break down (as in P€tersik, 1987). Thus, subjects adapted to 2Dimage motion designed to maximally stimulate either ihe SRP or the LRP, and theywere subs€quently tested on their perception ofrotalion simulations having difier€ntdegrccs of rotation between frames. If lhe SRP contributes to rccovery of structure!it was expected that adaptation of the SRP would decrease ihe angle of rotation(thereby also decreasing the 2D displacemenl of constituent elements) at whichperceprs ol structure breat down relative to a control condiiion. It was not clear whateffect adaptalion of the LRP might have; however, if the LRP and SRP truly operatein comp€tition, as has been suggesled by Pantle ard Picciano (1976) and Petersik and

Apparcnt nawnent atul rc.atet! oJ stuctute 281
Pantle (1979), it was expect€d that adaptation of tle LRP might incr€ase the angle ofrotation at which percepts of structure break down.
GENERAL METHOD
Stimuli were crcated on-line with an APPLE II+ misocomputer by a programwntten to run lhis experiment. They were prcsenied on ar APPLE Monitor III, withint€nsity adjusted to eliminate visible phosphor decay. A hardware modification ofthe computer (Cavanagh and Anstis, 1980) eliminated interleavirg of successiv€frames in a display and assured proper timing.
All adaptation stimuli consisted of two-frame displays in altemation. Two sets ofadaptation stimuli we.€ employed. The ffrsi consisied offour v€ttical lines, tle secondof randomly positioned pixels. For the line stimuli, the four lines were ofequal length(Sdegat a viewing distanc€ of80cm) and approximately 2.5arcmin diam (one pixel),and were separated by l44arcmin. In half of all displays, the second ftame of thesequencedirplayedlhesameline.shi f ledhoriTonlal ly l0arcmrnl inhalf .8?.5arcmin:
Random-element displays consisted of 50 pix€ls randolnly positioned within ai)invisible 2deg diam circle. From frame to frame, these elements were shifted byl0arcmin on half of all trials and by 87.5 arcmin on the rcmaining half.
Slimulus duration of both lypes of display was constant at 85ms. Interstimulusinterval (ISI) was varied so that for half of all displays it was 34ms, and on half102ms. It was expected that the displays with the small displacement combined withthe short ISI would adapt the SRP. On the oth€r hard, the larger displacementscombined with the longer ISI were expected to adapt the LRP. Combinaiions of smalldisplacements witl lollg ISIS and large displacements with short ISIS were also usedas adaptation stimuli in lhe present experiment, although rcsults from thes€ con-ditions are not presented here: As expected, they produced intermediate adaptationeilects and do not figure in the arguments presented here regardirg the roles oftheSRP and LRP in recovery of structure.
A bi-directional, back-and-forth, adaptation motion was chosen for two reasons:First, and morc importantly, the intent was to adapt motion systems rather thana particular directional respoDse. Second, since the elements of the rotating t€ststimulus themselves moved both l€ft and right in 2D projection, it was thought thatbidirectional adaptation would be appropriate.
In control conditions desigled to assess the jnfluence of flicker per se, a set ofstationary vertical lines with the same spacing as those above were presented with astimulus duralion of85ms and ISIS ofeilher 34 or 102ms.
The test stimulus always consisted of a four-pixel, three-frame simulalion of a 3Dsphere rotating around its vertical axis. The circular area in which the randomly-positioned pixels were plotted had a diameter of 7.5deg. Th€ pixels specifying ihemotion of the sphere were located anlrhere on the suface or within the volDme ofthe sphere, and theirpositions changed on each trial within a session. The sphere was

v = g . z r r r g a x a 2 = o . g u s
282
: ' , "9 - "
a,E 60
E
Fotalion itagnnude (dsg)
Figur€ r. Avenee element displ&enent and I I standdd devidlion produced ove! 50 robnons of givennagnitudes Nilh 1ie laent tes! stimuli.
prcsented wilh a perspective ratio of2-00;i.e. tlle simulated viewing distance was twicethe radius of the simulated sphere. Stimulus duration was again 85ms, and ISI wasconsiant at 68 ms, a value midway between the ISIS of th€ adapting stimuti. Given thatthe range of ISIS that are tolerated by the SRP can extend to and above ?sms(in a random dot direction discrimination task with 20% enor or less; Baher andBraddick, 1985), it was hoped that the 68-ms ISI used here would p€rmit bothshor! range and long-range effects to be revealed.' Finally, the angle of rotationbetween lranes changed over trials within a session- The potential range ofvariationwas 3deg rotation to 60deg rotation in 3deg steps. Figur€ 1 shows the averageelemert displacement and standard deviation produced over 50 rotations of givenmagnitudes. As can be seen, standard deviation becomes proportionally larger withrotation magnitude so that over trials ofthe experiment one might €xpect all bul themost exlrem€ rotations to provide some irputs to both the SRP and LRP.
Subiects
Three experienced psychophysical observers participated in the experiment. Two werefemale college students who w€re naive rcgarding th€ purpose of the experiment, andone was the author. AI1 participated in practice sessions during which they observedrotation simulations that were similar to those used in lhe experiment. Duringpraciice, subjects both started with small rotation angles and viewed the simulationwith progressively larger rotation angies until the percept of rctational coherencebroke down, and th€y started witl large rotation angles and view€d the simulatiorwith progressively smaller rctation angles until tle percept of rotatioml coh€renceoccured (this procedure was employed in Petersik (1987)). In order to maintainperformance at a relatively low range of vadability (and thereby reduce the totalnumber of experimental trials required), each subject pBctic€d the task a minimumof 5 h or until reaching consistert judgments within 12 deg of rotation. Two subjectsreached the criterion by the middle of the fourth hourlong practice sessioq the third,early in the fifth.

Appatnt nor4ehl ahd reuD{r ofstructure
Lhrc-adaptation stimuli. An experimenlal session opened with 5 min of adaptationto the conditions of illumination. This was folowed by 10min of adaptation to oneofthe five possible adapting stimuli: Two were formed by the combination of a shortISI with a small displacement and a long ISI with a larger displacemenq two wereformed by flickering stationary lines at the two ISIS; and one was a control conditionin which no stimuli w€re presented. Awarning buzzer announced the onset of the firsitrial, which consisted ofthree frames of tle rotation simulation, pres€nted with eitherl2deg rotation between frames (for an ascending series) or 60deg rctation betweenframes (for a descending series). During any stimulus presentation, the subject fixatedtlle center ofthe display while attendiDg to the stimulus array as awhole. The subject'stask was to report (by pressing a key on the computer) whether the target display gavethe app€arance of a structurcd object rotating in depth or not. Responses for thedisplays with the ldeg rotation always yielded percepts of objects 'n rotation; thosewith the 60 deg rotation did not. Following a trial, the adaptation display was againpresented for 40s. The readaptation display was followed by the rotation simulationwith either a 3deg increment in rotation angle (for ascending seriet or a 3degreduction in rotation angle (for descending seriet. The test-readapt-test sequence wascontinued until the subject showed a rcversal ofjudgments for thrce consecutive trials.The angle of rotation midway between the lasl judgment of the initial type and thefinl judgment of the three successive reversed twes constituted the subjecfs datum(although all responses at all angles were recorded for later analysis).
Each of the thrce subjects participated in 20 sessions ofthe no-adaptation contrclcondition (10 ascending and 10 descending). Two subjects (AR and BD participatedin 12 sessions for each adaptation stimulus, while one (TP) participated in 16. In allcases, therc were an equal rumber of ascending and descerding trials.
Randon-pixel adaptation stinuli. Th€ proc€dure was th€ same as for the line-adaptalion stimuli with the ex€ption that subjects served in 10 sessions per adaptationstrmulus.
For both kinds of adaptation stimuli, one complete experimeDtal session lasled30-40min.
RESULTS
It is assumed tbat the angle of rotation at which structurc from motion is no longerperc€ived ;s a measure of the strength of the recovery-of-structure process, largerangles reflecting a stronger tend€ncy to recover structure.
Line-adap t at ion s I imul iIn the first analysis of the data, estimates of the angle at which percepts chang€d from'object' to 'no object' (hercafter called the 'coherence Limit') were plotted as a functionof adaptation ISI for each condition (see Fig. 2). As can be seen the condition ofadaptation in which both lhe spatial and temporal parameters favored the SRPrcsulted in a lowering of the coherence limit relative to both the flicker controlcondition and the no-adaptation control. Similarly, adaptatior with parameters thatfavorcd the LRP resulted in breakdown of the object percept at larger angles of

9 s
e 4 3=
-a +o
Ad.platlor lsl (ns)
Fiesre 2, Argle ,t *hich p€repts of3D stnctuE br*k dwtr (coh*neftnit) 6 a furclion ofadaptalionlsl to. *h of thE subiets- Data frcm lin€{dapiariotr spdimenl, Arow jndiete mheMce limitsoblai.ed in .oadaptation onlrol @ndirions. Snall siitu eerc loamiD: larg6 shifts, 87.5 arcmin.
rotaiion. The results for flicker adaptation at the two ISIS showed little change fromthe no-adaptation control condition.
The impressions gleaned from Fig. 2 were supponed by a one-way repeal€d-measures analysis ol variancr in which lhe majo. coDdidons of the experimml werecompared (i.e- tlose that faaored adaptation to the SR? and LRP, respectively, aswell as tlle flicker and no-adaptation controls). This analysis showed a significantetrect of experimeDtal condition, ,F (3, O : 17.59, P : 0.003, and omega-squaredshowed that lhe experimentat manipulalioDs accounted for over 8l% ofthe vanabilily.Planned comparisons showed that the coherence limits produced by adaptation ofthe
Anateht nownent ond retatrr of sttucture
No Adaplatlon Subl: BV
Y' = .602 - .088x + .oo3x2 - 3e-5x3 R2
2lJ5
Folalion between Frames (deg)
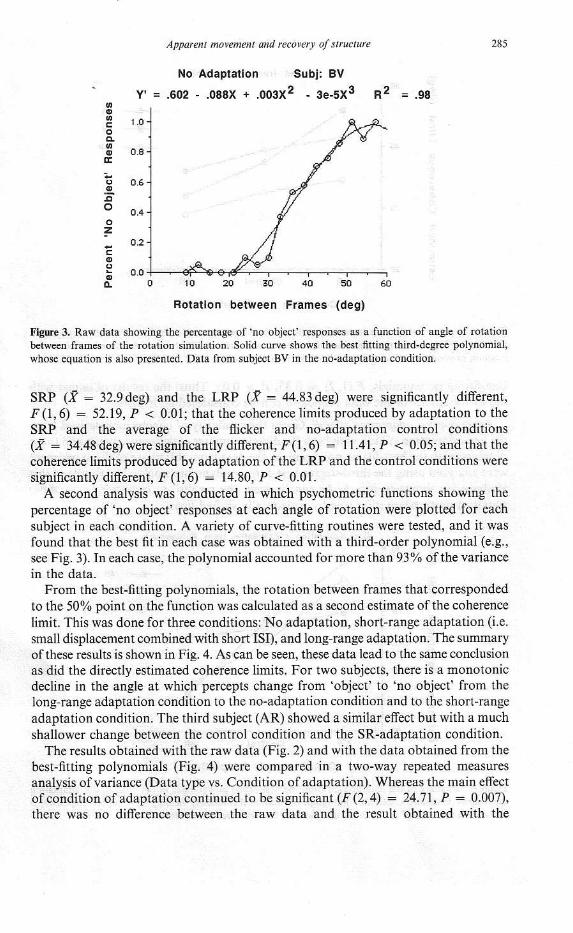
Figm 3. Rav data showiDg rhe perentase of no object responses d a fnnction of arCle of rolatiorbetwee. franes of the robrion sinulatio!. Solid cDrle shows th€ best nnirs rhird-deere poltnonial,wlose equation is also pesented. Dala from subjNt Bv in the no-adaplalion .ondilion.
SRP (-r:32.9deg) and the LRP (t:44.83des) were significantly different,-F(1,6): 52.19,P < 0.01; tllat the coherence limits produced by adaptation to theSRP and the average of the flicker and no-adaptation control conditions(-r: 34.48des) were significantly different, F(I,6) : 11.41, P < 0.05;and that lhe€oherenc€ lirnits produc€d by adaptation of the LRP and tlle contml conditions weresisnificantly different, F(1,6) : 14.80, P < 0.01.
A second analysis was conducted in which psychometric functions showing tlleperc€ntage of'no object' responses at each angle of rotation were plotted for eachsubject in each condition. A variety of curv€-fitting routines were tested, and it wasfound that the best fit in each case was obtained with a third-order polynomial (e.g.,see Fig- 3). In each case, the polynomial accounted for more than 93 % of the variancein the data.
From the best-fitting polynomials, t}}e rotation between frames that correspondedto the 5070 point on the function was calculated as a second estimate ofthe coherenc€limit. This was done for three conditioN: No adaptation, short-range adaptation (i.e.small displacement combined with short ISD, and long-range adaptation. The summaryoftbese results is shown in Fig. 4. As can be seen, tnese data lead to the same conclusionas did the direcdy estimated cohercnce limits. For two subjects, therc is a morotonicdecline in ihe angle at which percepts change from 'obj€ct' to 'no object' from thelong range adaptation condition to tbe no-adaptation condition and to the short-rangeadaptation condition. The third subject (AR) showed a similar effect but with a mrchshallower change between the control condition and the SR-adaptation condition.
The results obtained with the raw data (Fig. 2) and with the data obtained from thebesffitting polynomials (Fig. 4) were compared in a two-way repeated measuresanalysis of variance (Datatype vs. Condition ofadaptation). Wher€as the main effectofcondition of adaptation continued to be significant(F (2,4) : 24.'ll, P : 0.001),there was no dilTerence between the raw data and the result obtained with the
=

Condition ol Aalaptation
Figue 4. Sumnary ofthe data dqived f.om the b6rntdng polynomials tu ih€ iin*idaptation e4erinent.Eslimred coh€Hce linir (angie of rolation lheorclicany yieldirg 50% obj@f responses) is shoNn as afunction of coDdilior of adaDtation. Dala for thE obsneB.
best-fitting polynomials, F (1,2) : 0.33, P > 0.05. Thus, t}le results obtained withthe two methods of the data reduction can be considered equivalent.
Random-pixel adaptution rtirrli. Given the similarity of conclusions derived fromthe line-adaptation stimuli with both the direct es[imates of cohercnce limits and thoseobaained witl t}le best-fitting pol]'nomia1s, the data from this phase ofthe experimentwere analyzed using tlle third-degree best-fitting polynomials only. The results of thisanalysis ar€ shown in Fig. 5. As can be seen, the results are consistent with tloseobtained when adaptation was to hodzontally shifted lines.
Cond i t ion o f AdaPt t l ion
Fieue 5. Sllmarr of the dala derived fron the besltning polymmiab in the nndon-dor adapt*iondpednent. EsliMred coheEnce linit (arele of roi.lior thereticaly yjelditrg 50% objel responset isshown as a iunclion of conditon of .daptilion. Data for thr€e observers.
E
E
E

Appa.ent norenenl ohd r.corer! ofstu.ture
DISCUSSION
Mather (1989) summarized the dependence of the perception of depth in 3D rotationsimulations consisting ofrandomly positioned pixels in tbe following way: Structurein depth is most reliably seen when the 2D displacement ofelements between framesis small (less than about 15 arcrnin); when the duration between frames is less than80mq when sampling rates arc in the range of 40 60ms; and when viewing ismonoptic or binocular, but not dichoptic. Since th€se pref€renc€s are similar to thoseidenrifl€d witl the SRP, Mather (1989) concluded that the KDE depends upon theoutput of short-range motion detectors. Civen that the SRPcan be selectively adapted(Petersik & Panrle, 1979), the present experiment has supporled Mathefs conclusion.Although tlle effects we observed were small, they were consistent: Adaptation tomotion (either line elements or pixels) whose spatiotemporal paramet€rs favor theSRP decreases the range of angles of rotation between frames over which cohercntsfucture iD depth can be seen. This would be expected if, as the SRP becomesprogressively adapted, its requirements for stimulation narowed closer and closer toits oplimum. At the same time, the present data show that adaptation of the LRPincreases the range of angles of rotation over which the KDE is seen. Since the SRPand LRP are competitive in at l€ast some AM displays (Pantle and Picciano, 1976;Pelersik and Partle, l9?9; Petersik, 1989), it is possible that adaptation of LRP(perhaps through a weal(ening of lateral inhibirion) rclaxes the requirements forstimulation of the SRP so that greater displacements of the stimulus elements can betolerated.
It is not cl€ar from available evidenc€ whether tle LRP process contributes to theKDE in any way other than possibly inhibiting the SRP. Matler's (1989) dara susgestthai conditioN of presentation favoring the LRP alone do not consistently yieldpercepts of rotation in depth. Nonetheless, the data of Petersik (1980) suggested a rolefortheLRPin the rccovery of structue indepth. As Mather (1989)notes, hisdisplaysconsisted of 200 elements, which may have provided the possibility of more false-matches than the LRP car resolve. On the other hand, Petersik (1980) used displaysconsisting of60 pixels or fewer, which may have been more favorable to the LRP. Inany €vent, it is clear that rotation simulations in which angular mtation betweenframes is in the mnge of 30-60 deg can, given proper conditions ofpr€sentation, yieldgood percepts of rotation in depth (Petersik, 1987; Todd et dl, 1988). In most cases,the displacement ofthe majority of stimulus elements in such displays will be beyondthe limits of the SRP (se€, for example, Matler, 1989, Fig. 3). Prazdny (1986) hasshown that local image motions can be made to define wire'obj€cts that are themselvesmanipulated to pmdrce a KDE. Prazdny (1986) offers arguments lhat the LRP isresponsible for t}le KDE. Thus, it is entirely possible that in the perc€ption of th€ 3Dmotion ofobjects the SRP plays a larger role in defining an object's structure whereasthe LRP plays a larger role in reporting the object's motion.
The SRP is frequently considered to represent an 'early' stage in tle analysis ofvisual motion (e.g., Julesz and Shumer, 1981). As such, it is clear that the SRPpotentially plays a rolein matching the moving elements ofa2D display in such a waythat recovery of 3D structurc can occur. Additionaly, tlle LRP is often thought to bea 'higher-order' process! more susceptible to cognitive influences (e.g., Goldstein,1989; Petersik, 1989). If these characierizations of the hypotheiical SRP and LRP

are correct, the present results, along with lhe work of Prazdny (1986), otrer t}]esuggastion that in the fecovery of 3D siructure from a moving 2D image lowlevel,early, proc€sses and highlevel processes participate together in the construction oftheperceived visual world.
Such a proposal may seer irconsistenr with the notion that the SRP and LRPsometimes compete with one another! as suggested by the bistable Ternus displaystudied by Pantle and Picciano (1976) ard others. However, even with the Temusdisplay it has beer shown lhat the SRP and LRP can operat€ simultaneously in somepercepts (Bmddick and Adlard, 1978). The principles governing the competition ormutual participation ofthe SRPand LRP have not beendiscovered to date. Nonetheless, on the principle that the visual sysiem isunlikelyto have evolved to'throw away'information, it seems plausible that relevant signals from the SRP and LRP can beioined at some level.
The present results also relate to an issue that is emerging in the experimentalliterature of motion p€rception, namely, wh€ther the lwo-process distinction is a validone. Cavanagh and Mather (1989) have recently concluded that the apparent differ-ence between putative long-range and short-rarge processes can be explaiied on thebasis ofa single motion-prccessiq system that operates on either low-level (pdmarilyluminance defined) stimuli or highlevel (created through some initial prc-processing.)stimulus objects. Similarly, a thorough examination of changes in the maximumdisplacement ielding accurate direction idertification in sine-wave and random-dotstimuli resulted in the conclusion that therc was no evidence for the existence of ashort range process (Bischof and Di Lollo, 1990)- Nonetheless, the results of thepresent study involving the KDE, as well as those of Petersik and Pantle (1979)involving the bistable Temus phenomenon (Ternus, 1938), show lhat th€re aredifferentiai eff€cts that result from selective adaptation to stimr i that (th€oretically)activate the SRP and LRP, respectively. The exjst€nce of such selective-adaptationeliects needs to be accounted for by the single-motion-prccess approach before thedistinctior beiweer shorl and long-range processes is abandoned.
T lhank T. Bachmann for belpful discussion.
REFERT.NCESBakcr, C. L. and Braddick, O. J. (198J). Ecccnrriciry-dependent salins ol the linirs aor short{ange
atFl.am n ion f"r"frion vi,ian Rp: 25 401 al2.Bischof, w' F. and Di LoIo, V. (1990) PerceptioD of directioDal samlled notion in rclation to displace-
rent and spatial fiequency: Evidence for a unitary notion systen. ,/6r, x.r. 30. 1l4i 1362.Braddick, O. J. and Adlard. A. J. (1978). AppaEnl nolion and the nolion deteclor. Ini /d,zl Prr,.ro-
phqics dhd Phlsialas!. !. Arninslon, J. Krauskopf and B. R. Woolen (Eds ). Acadenic PEs, New
Bnunslein, M. L. (19t6). D.plh Petceptian Thtaush Motion Academic Pre$: Ncs Yo.k.Clvanagh, P. and Anstis, S M. (1980). Vhuat psychophysics on lhe Apple lI: G€tling srjrted. Behariat
Res. M"th..lt lhlluhektatbh 12.614 626.Cava.ash, P. and Mather, G. (1989). Motior The Iong and the shorr ofil. Sprul vrrb" 4. 103 129.Chans.J.J. and Jul6z, B. (1984). Cooperalile phenomcna in apparcnl movement perception of random
dot cinenarograns. t'i:bn R.s.24,l7al 1184.Dosher. B. A., Landy, M. S. a.d Sperlirs, G. (1989). Kinedc deplh ellel and oplic now L 3D shape
Irom Fourier motion vt)on Reparch.2g,1189 l8ll.

At4te"t hapMht dd rc.awrr a[ lru.ture
Goldslein. E. B. (1989). ,t€,sarian a"/ Perceptioh l3rd ed ). w adsworln: Belmont. CA.Jdesz, B. andshuner. R. A. (1981). Early visual perception. Annu. ReL Psr.hol.32.515 428.Mather,G. (1989). Early motion prcce$es and lnelineticdeplh etrecl.0. "r.6rrr. Prt.rol.4lA,183 l9lJPanlle,A. J. and Pieiano, L. (1976). A nullistable novenenrdkplayr Evidcncc for lwo separale nol1on
systens id hutuan ision. Sctu .? 193, 500-502.Petesil,J. T. (1980). The etrectsofspatial and lcmporallaciors on thc perc€ption ofstroboscopic rotan.n
slinulations. P.r..prbr 9. 2?l 281.Petersik. J. T. (1987). Recoveryofstructure lron dotion: lnplicatioas lor a p€rformance theory bdsed on
the struclure-fron-nolion theorcm. Percept Psr.hopht-s. 12. 355 [email protected], J. T. (1989). The two-proce$ distinction in apparenl tuorion. Psr(h.|. B l.106,101 121.Petersik, J. T. (1990). Clobal moperativny ofthe short range lroess: Elidmcc obtained wiib conlour
containing srinuli. P.r."p. Psrrhophrs. 47, 360 364Pelersik,J. T and Panlle, A. J. (1979). Facton controllinstheconpetins sensations produed by a hnhbh
slroboscopic morion display. vithh Res.19.143 151.Petersik, J. T., Pufahl. R. and Krasnon E. (1983) Failure ro find an absolure .€tinal limit ofa putalive
short{ange process in aFpaFlt notion. I/d,, ncr. 21, 1663 1670.Pr@dny, K. (1986). ThrN-dinensional struclurc fron lons{dnge dpparenl notioa. P?..@r/rt5.619 625.Tsnus, J. ( 1938). Tne problcm of phc.omcnal idenlily In: A Souree Book oJ Gesta, Psychalat!!. W . D.
Ellis (Ed.). Routledge & Kegan Paul. London.Todd. J. T., Akc6tron. R. A., Reichel, F D. and Hay6, W. ( 1988). Apparenl rotalion in threc-dhensional
space: Efiecls of ledpoal, spalial. and sbuctural factors. Pd.e?l. PtlthDphlt. 13, 119 Ia8.warlacl. H. and O'Connel1. D. N. (1953). Tne kinelic depth effqr. J. Exp. Pstchal. 15,205-2r'1.
NOTES
l� ll is wo h acknowledeing heie lhat the shon{ange proces and long-range proces in apparcnlnovenent are hFodFtical constructs used lo explain ihe rcsutls ofpsychophysial eaperinents. Thereappeanlo be considerabl€ evidence for tncir cxhlcnce (e.s., Petersik. 1989), and under any circumslan.cthcy arc uscful in concpftalinns ttc pcmplion ofapparent molenenr. As is alNals the casc in wotkinssith hypothetical constructs, I rcly on lbe Lusirency belween prcvious cxpffimcntal rcsults and lhea$uned charactenstics oflhe snod- and long-ranec pro@s*s to oreanize rhe culren! experinenls andexplain the da1a. Ttis proce$ seens required unlilsuch atimc as borh cmpirical and theorelical developments wdrrant the substitrlion olahetuative constucls or interoretalions.
2. ln principle, this adaptalion display permiltcd notion 10 be peMived in either of two di.ections, oneconesponding to the 87.5arcnin shilt (the shift of the enlire connguralion of linc clcnenk) and onecorresponding ro Lhe opposile direlion.nd strhlending 56.5 arcnin. Pilor work shoscd thar with a 102 nslsl subj€ls nearly always rcported motion in the di.€tion of 8t.5 arcnin shift. This was perhaps bmauseonly notion in this diredion p.ovided a solution to the corrcspondence !.obh (ie., only nolion in lledireclion of the 87 5arcnin pemilled all lines to havc nalchs bctNmn fiam€t.
3. An additional juslification aor using a rcsr stinulus whosc ISI was nidway between the ISk orlheadapting nuliderives fron an earlier selective adaptation sludy oiPd*sik and Pantb (19t9). There itwas shown that: (l) in the absen@ ofadlplalion, thc influcnc of ISI on the rclalive nunbers ol Eportsol short range and long range percepts was nearly linearj and (2) adaptalion 10 cxtrcme shorh.nce orlong ranse novehent had nelrly equivalent, although olposile etrecls on the relativc nunbers ofsubsequent repons ofsiorljange a.d longjangc percepts in a lest display.
Copyright © 2022 FDOKUMEN