Digital Selector Switch AlphaMiniCourse Gyro Compass
39
The information in this Manual is subject to change without notice and does not represent a commitment on the part of ALPHATRON MARINE B.V. Document : Digital Selector Switch Alphaminicourse Issue : 1.2 © ALPHATRON MARINE B.V. ALPHATRON MARINE B.V. Schaardijk 23 3063 NH ROTTERDAM The Netherlands Tel: +31 (0)10 – 453 4000 Fax: +31 (0)10 – 452 9214 P.O. Box 210003 3001 AA ROTTERDAM Web: www.alphatronmarine.com Mail: [email protected] Digital Selector Switch AlphaMiniCourse Gyro Compass Installation and Operation MANUAL ALPH~TR eN Marine
-
Upload
khangminh22 -
Category
Documents
-
view
0 -
download
0
Transcript of Digital Selector Switch AlphaMiniCourse Gyro Compass

The information in this Manual is subject to change without notice and does not represent a commitment on the part of ALPHATRON MARINE B.V. Document : Digital Selector Switch Alphaminicourse Issue : 1.2 © ALPHATRON MARINE B.V.
ALPHATRON MARINE B.V. Schaardijk 23 3063 NH ROTTERDAM The Netherlands Tel: +31 (0)10 – 453 4000 Fax: +31 (0)10 – 452 9214 P.O. Box 210003 3001 AA ROTTERDAM Web: www.alphatronmarine.com Mail: [email protected]
Digital Selector Switch AlphaMiniCourse Gyro Compass
Installation and Operation MANUAL
ALPH~TRe N Marine

Digital Selector Switch Issue 1.2 Page 2 of 39
DIGITAL SELECTOR SWITCH ALPHAMINICOURSE
This installation and operation MANUAL of the Digital Selector Switch is an important part of the
Alphaminicourse gyrocompass that is designed for marine & river vessels or high-speed vessels
(including those sailing in high latitudes). It provides measurement of heading and computation
of rate of turn for navigation and steering of vessels.
Only authorized personnel may operate the Digital Selector Switch after studying this Manual.
ALPH~TRe N Marine

Digital Selector Switch Issue 1.2 Page 3 of 39
DIGITAL SELECTOR SWITCH ALPHAMINICOURSE
CAUTIONARY NOTICES
Please note the following cautionary notices that apply throughout this Manual.
WARNING
The Digital Selector Switch weights 6,5 kg. To avoid personal injury, take proper
precautions if the equipment is lifted or moved.
CAUTION!
Retain the original transit cases so they can be used to transport the gyro compass
when necessary. One will void the warranty if improper packing during
transportation is used.
CAUTION!
If the Digital Selector Switch is placed in an enclosed space, make certain there is
sufficient ventilation and circulation of free air to allow effective cooling.
CAUTION!
Do not make any connections to the Digital Selector Switch with power on the supply
cable.
CAUTION!
Only certified uninterrupted power supplies shall be used for the Digital Selector
Switch operation.
CAUTION!
DO NOT modify this equipment in any way without obtaining a written permission
from ALPHATRON MARINE otherwise you will void the warranty.
ALPH~TRe N Marine

Digital Selector Switch Issue 1.2 Page 4 of 39
DIGITAL SELECTOR SWITCH ALPHAMINICOURSE
Contents 1 WARRANTY ..................................................................................................................... 5
2 INTRODUCTION .......................................................................................................... 5
2.1 Functions ................................................................................................................... 5
3 INSTALLATION ................................................................................................................. 6
3.1 Cable types ................................................................................................................ 7
3.2 Terminal overview on boards ........................................................................................ 7
3.3 Power supply terminal ................................................................................................. 8
3.4 Inputs terminals ......................................................................................................... 8
3.5 Output terminals ........................................................................................................ 9
3.6 Connecting an AlphaMiniCourse Gyrocompass to Digital Selector Switch .......................... 10
4 OPERATION .................................................................................................................... 11
4.1 Control Unit ............................................................................................................. 11
4.2 Adjustment mode Input & Output ............................................................................... 12
4.3 Main Operation Mode ................................................................................................ 14
4.4 Power-On ................................................................................................................ 15
4.5 Menu mode and Edit mode ......................................................................................... 16
4.5.1 Software Information .......................................................................................... 16
4.5.2 Selection of Gyrocompass or External heading sources ............................................ 16
4.5.3 Latitude Correction ............................................................................................. 16
4.5.4 Speed Correction ................................................................................................ 17
4.5.5 Allowable heading difference ................................................................................ 18
4.5.6 Operation Mode GC or DG .................................................................................... 18
4.5.7 Drift Compensation mode .................................................................................... 18
5 FAILURES ...................................................................................................................... 20
5.1 Built-in Test Equipment ............................................................................................ 20
5.2 Fuses & Replacement ................................................................................................ 20
5.3 Failure messages and Remedy .................................................................................... 21
6 TECHNICAL DATA ........................................................................................................... 22
6.1 Specifications ........................................................................................................ 22
6.1.1 Power Requirements ........................................................................................... 22
6.1.2 Signal Inputs...................................................................................................... 22
6.1.3 Signal Outputs ................................................................................................... 22
6.1.4 Dimensions and Weight ....................................................................................... 22
6.2 Data Formats .......................................................................................................... 23
6.2.1 IEC 61162 Serial Data Formats – General Information............................................. 23
6.2.2 Inputs ............................................................................................................... 23
6.2.3 Outputs ............................................................................................................. 29
7 WARRANTY REGISTRATION FORM ..................................................................................... 33
8 CONNECTIONS FORM ...................................................................................................... 34
9 INPUT & OUTPUT SETTINGS FORM .................................................................................... 35
APPENDIX A – Connection Diagram Switch Unit ..................................................................... 36
APPENDIX B – Dimensional drawing of Control Unit ................................................................ 37
APPENDIX C- Dimensional drawing of Switch Unit for Bridge mounting ..................................... 37
APPENDIX D- Dimensional drawing of Switch Unit .................................................................. 39
ALPH~TRe N Marine

Digital Selector Switch Issue 1.2 Page 5 of 39
DIGITAL SELECTOR SWITCH ALPHAMINICOURSE
1 WARRANTY
Following the installation of the Digital Selector Switch either a copy of the
Installation / Commissioning report or the Warranty Registration Form is to be sent
to Alphatron Marine in Rotterdam ([email protected]) within two
weeks. Carefully note that the Installation / Commissioning report should cover at
minimum the information as requested on the Warranty Registration Form. The
Warranty Registration Form can be found in chapter 8. One should obey this
procedure to validate the warranty.
Following the installation of the Digital Selector Switch a Connection and Input &
Outputs Forms is to be sent to Alphatron Marine in Rotterdam
([email protected]) together with the Warrant Registration Form. This
information is requested for presetting of an exchange ALPHAMINICOURSE before it
is send to replace the defected ALPHAMINICOURSE.
2 INTRODUCTION
The digital Selector Switch is designed for the gyrocompasses control and building up a system of
several Alphaminicourse gyrocompasses or other external heading indicators. The Digital Selector
Switch consists of an Switch Unit and Controller. All data is displayed on the controller. The number
of units may vary from 1 to 4. Interfaces of the Selector Switch are similar to the Alphaminicourse
gyrocompass interfaces. All AlphaMiniCourse gyrocompasses connected to the unit are controlled
from one control box. Each gyrocompass may be individually switched on or off (including its inner
power supply). Before connection to the selector switch all Alphaminicourse gyrocompasses shall
be tested and adjusted.
2.1 Functions
❑ The single control unit for all connected Alphaminicourse gyrocompasses. Operation mode
(DG,GPS LOG) latitude and speed values are common to all gyrocompasses.
❑ Receipt of information from GPS and LOG will be translated to all connected gyrocompasses
via the control unit channel
❑ Selector Switch: One of the gyrocompasses is selected as main source. Data from the main
gyrocompass are transmitted to the heading receivers.
❑ Comparison of headings from several gyrocompasses or external heading sources. Only
properly operating gyrocompasses in the readiness state take part in the comparison.
Connected External heading sources are already in readiness state and will take part in the
comparison. The difference in the readings of one gyrocompass compared to all others for
the value that exceeds the setting is considered a failure.
ALPH~TRe N Marine

Digital Selector Switch Issue 1.2 Page 6 of 39
DIGITAL SELECTOR SWITCH ALPHAMINICOURSE
3 INSTALLATION
On example how to configure your Digital Selector Switch system is given in figure 3.1
How to connect an AlphaMiniCourse Gyrocompass can be found in paragraph 3.6.
The Control unit that can be built-in into the bridge front panel.
It is mounted as follows:
1) Cut the window with the mounting holes in accordance with Appendix C
2) Remove the decorative moldings, unscrew 4 screws and remove the cover;
3) Put the unit under the front panel and the cover – on the top of the front panel. Clamp the
panel between the cover and the housing of the unit by four screws. The bridge front panel
shall be 3 to 6 mm thick.
4) On your console panel make the mounting hole for the Switch unit in accordance with
Appendix D
Overview of Appendix in this manual:
Connection diagram is given in the Appendix A
Dimensional drawing of the Control Unit is given in the Appendix B
Dimensional drawing of the Control Unit for bridge mounting is given in the Appendix C
Dimensional drawing of the Switch Unit is given in the Appendix D
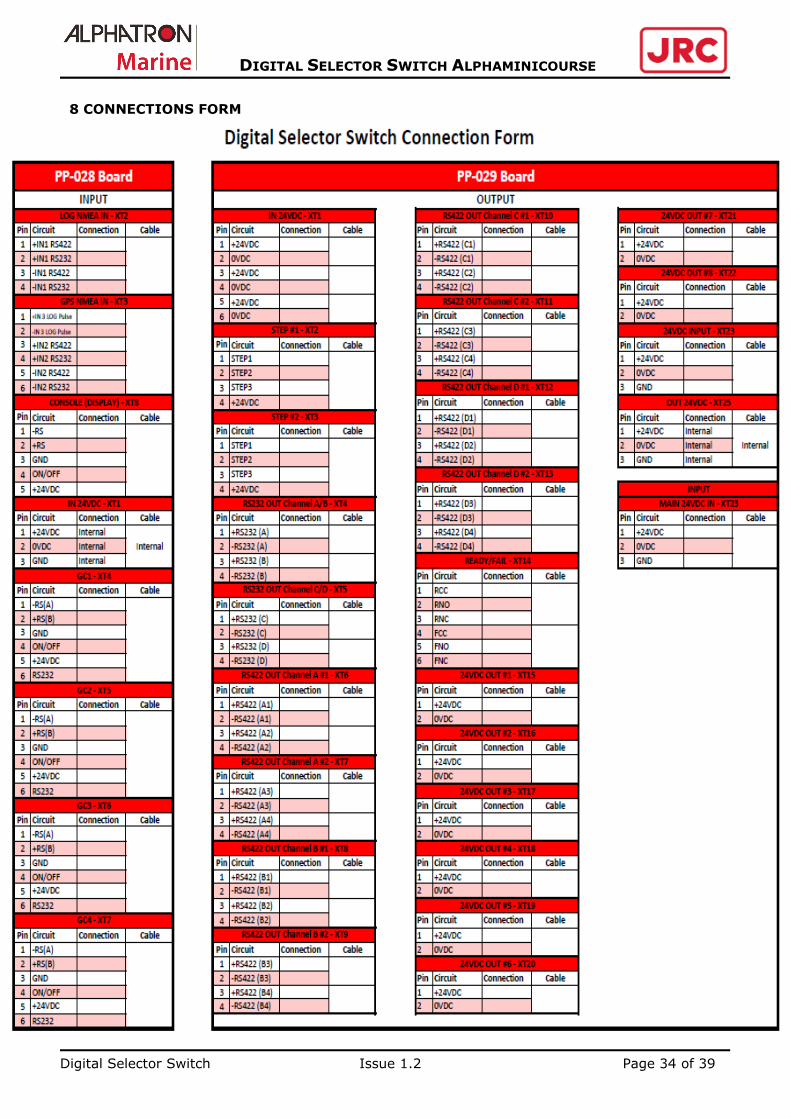
The Digital Selector Switch consists of an Switch unit and Control Unit Panel. Inside the Switch Unit
there are terminals located on PCB PP-028 and PCB PP-029. Location of terminals can be found in
figure 3.2.1. and a connection diagram can be found in Appendix A.
Description of the power input terminals this can be found in table 3.3.1;
Description of the input terminals can be found in table 3.4.1
Description of the output terminals can be found in table 3.5.1
Cable types for connection to and from the Digital Selector Switch are specified in table 3.1.1
When using the Alphaminicourse Gyrocompasses or other Gyrocompasses types they should be
aligned so that its fore-aft axis is parallel to the for-aft datum of the vessel. Any misalignment
between the compass housing and vessel will decrease the accuracy of heading measurements
provided by the gyro compass.
Figure 3.1 – Example Digital Selector Switch configuration
ALPH~TRe N Marine
Switch Unit
EXT Heading
GPS & LOG (optional) input
Uninterruptible 24V DC
Outputs: Heading 16x RS422 Heading 4x RS232
Stepper Alarm drycontacts
&NM EA
AIJ'li>JNN
Control Unit
DIQJALKUC'IO.IMrCH Al..fflAMINKOUltM

Digital Selector Switch Issue 1.2 Page 7 of 39
DIGITAL SELECTOR SWITCH ALPHAMINICOURSE
3.1 Cable types
Table 3.1.1 Suitable cable types
Purpose Suitable cable
Power supply 3 x 1.5 mm² screened cable
RCU from Gyrocompass
Controller Panel
3 x 2 x 0.5 mm² double screened cable
Ready & Fail output
Serial data heading output
STEP output
3 x 2 x 0.5 mm² screened cable
- 10 meters for RS232
- 100 meters for RS422
External Heading Source
GPS input
Pulsed LOG input
LOG NMEA input
2 x 2 x 0.5 mm² screened cable
Earth 6 mm² wire
3.2 Terminal overview on boards
Figure 3.2.1 – Appearance of board PP-028 and PP-029 in the Switch Unit.
ALPH~TRe N Marine

Digital Selector Switch Issue 1.2 Page 8 of 39
DIGITAL SELECTOR SWITCH ALPHAMINICOURSE
3.3 Power supply terminal
Table 3.3.1 – Power supply input
Location Position Description Pin Terminal pins Signal Description
PP-29
XT23
No.10
IN 24
1 + 24V
Main power supply 2 GND
3
PP-28
XT1
No.9
IN 24V
1 + 24V Input main power PP-28
Already connected 2 0V
3
3.4 Inputs terminals
Table 3.4.1 - Inputs
Location Position Description Pin
No.
Pin Description Signal Description
PP-28
XT4-XT7
No.1
GC1-GC4
1 ─ RS422/RS232 (A) Similarly-named pins of the
RCU connector on
Alphaminicourse or connect
External heading source on
pin 1 & 2 for RS422 of 1 &
6 for RS232
2 + RS422 (B)
3 GND
4 ON/OFF
5 +24V
6 + RS232 (B)
PP-28
XT8
No.2
CONSOLE
1 ─ RS422
Similarly-named terminals
on the Control Unit.
2 + RS422
3 GND
4 ON/OFF
5 +24V
PP-28
XT3
No.3
+ IN III 1 + TTL
Pulsed Log input ─ IN III 2 ─ TTL
+ IN II 3 + RS422 (B)
NMEA GPS input ─ IN II 4 ─ RS422 (A)
+ IN II 5 + RS232 (B)
─ IN II 6 ─ RS232 (A)
+ IN I 7 + RS422 (B)
NMEA LOG input ─ IN I 8 ─ RS422 (A)
+ IN I 9 + RS232 (B)
─ IN I 10 ─ RS232 (A)
PP-029
XT1
No.13
IN 24V 1 +24V
Step interface power supply IN 24V 2 0V
IN 24V 3 NC
Not Connected IN 24V 4 NC
IN 24V 5 +24V
24V DC Output IN 24V 6 0V
ALPH~TRe N Marine

Digital Selector Switch Issue 1.2 Page 9 of 39
DIGITAL SELECTOR SWITCH ALPHAMINICOURSE
3.5 Output terminals
Table 3.5.1 – Outputs
Location Position Description Pin
No.
Pin Description Signal Description
PP-29
XT6
XT7
No.4
Heading
Channel A
(1-4)
1 RS422 (Tx+)
4x digital outputs
Channel A 2 RS422 (Tx─)
3 RS422 (Tx+)
4 RS422 (Tx─)
PP-29
XT8
XT9
No.4
Heading
Channel B
(1-4)
1 RS422 (Tx+)
4x digital outputs
Channel B 2 RS422 (Tx─)
3 RS422 (Tx+)
4 RS422 (Tx─)
PP-29
XT10
XT11
No.4
Heading
Channel C
(1-4)
1 RS422 (Tx+)
4x digital outputs
Channel C 2 RS422 (Tx─)
3 RS422 (Tx+)
4 RS422 (Tx─)
PP-29
XT12
XT13
No.4
Heading
Channel D
(1-4)
1 RS422 (Tx+)
4c digital outputs
Channel D 2 RS422 (Tx─)
3 RS422 (Tx+)
4 RS422 (Tx─)
PP-29
XT14
No.5
READY
1 RDY CC
Relay contacts
2 RDY NO
3 RDY NC
FAIL
4 FAIL CC
5 FAIL NO
6 FAIL NC
PP-29
XT4
No.6
Heading
Channel A
1 RS232 (Tx+)
Digital outputs 2 RS232 (Tx─)
Heading
Channel B
3 RS232 (Tx+)
4 RS232 (Tx─)
PP-29
XT5
No.6
Heading
Channel C
5 RS232 (Tx+)
Digital outputs 6 RS232 (Tx─)
Heading
Channel D
7 RS232 (Tx+)
8 RS232 (Tx─)
PP-29
XT2
XT3
No.7
STEP
(1 & 2)
1 S1
2x Stepper outputs with
positive common point.
Fuses F3-F7(1A)
2 S2
3 S3
4 +24V
PP-29
XT25
No.8
24V OUT
1 + 24V 24V to PP-28
(already connected) 2 0V
3
PP-29
XT22-XT29
No.11
OUT 24V
(1-8)
1 + 24V 8 power supply outputs for
repeaters. (max load 1A) 2 0V
3 NC
PP-29
XT24
No.12 PANEL 24V to main switch Panel
(already connected)
ALPH~TRe N Marine

Digital Selector Switch Issue 1.2 Page 10 of 39
DIGITAL SELECTOR SWITCH ALPHAMINICOURSE
3.6 Connecting an AlphaMiniCourse Gyrocompass to Digital Selector Switch
There may be applications where you prefer your AlphaMiniCourse Gyrocompasses to be
controlled by a single control unit of the Digital Selector Switch. For this purpose it is needed to
disconnect the Control Unit of the Alphaminicourse Gyrocompass and replace it with a blanking
plate as shown in figure 3.1.
The following items are needed:
❑ Blanking plate for the Main Unit housing
❑ 10m or 20m 7M2 cable
There is no need to remove the gyrocompass cover to install RCU externally:
1. Release and remove the four М3 screws at the corners of the CU
2. Lift the CU away from the Main Unit.
3. Disconnect the CU cable from the corner socket of analog PCB. Instead of it connect the
second cable that is located nearby.
4. Take out the CU and store it on a save place
If there is no blanking plate present, please keep the CU in place.
5. Connect the 7M2 cable on RCU output of the rear panel from the Main Unit. Route the cable
through the cable gland of the Digital Selector Switch Unit.
6. Connect 7M2 cable in the Digital Selector Switch Unit as shown in below figure and table 3.6
Note:
If you have more AlphaMiniCourse Gyrocompasses to be controlled by the Digital
Selector Switch they can be connected on terminal XT5 (GC2), XT6 (GC3) and XT7
(GC4).
7. Fit the blanking plate to fill the gap left in the cover of the Main Unit after the removal of the
CU.
ALPH~TRe N Marine
AlphaM iniCo urse
Gyrocompass rear
panel
RCU
Output
Pin r-- we
1 r--r--
bn 7M2 cable 2 r-r-- gn
3 r-- ,xi_ 4 -
5 ~ -
Digital Se lecto r
Swit ch Unit
Pin Circuit
;±!!;. 1 -RSIAI bn XT4 - 2 ,RS(B) g n
3 GNO y l
ONIOFF GCl 4 gy - 5 ,24 V
6 RS232

Digital Selector Switch Issue 1.2 Page 11 of 39
DIGITAL SELECTOR SWITCH ALPHAMINICOURSE
4 OPERATION
4.1 Control Unit
The Control Unit front panel includes all controls for the Selector Switch. Control and indicator
functions of the Control Unit are shown in table 4.1.1
Table 4.1.1 – Control Unit functions
Control Function
System ON/OFF. Hold for at least 1 seconds to switch the system off. The system is
completely switched off after all gyro rotors come to rest
UP Selection. Press to increase display brightness, to select the parameter or to move
the cursor in Menu Mode.
DOWN Selection. Press to increase display brightness, to select the parameter or to
move the cursor in Menu Mode.
LEFT Selection. Press to move the cursor in the Menu Mode
RIGHT Selection. Press to move the cursor in the Menu Mode
MENU Button. Press to enter the Menu Mode or to insert the changes of parameters
that were made.
CANCEL Button. Press to quit from the Menu Mode or to cancel the changes that
were made in parameters.
Press to silence the audible alarm in case of failure
Adjustment of brightness applies to the Control Unit display and to the backlighting of all connected
AlphaMiniCourse gyrocompasses dials.
A cursor on the display has a form of a highlighted rectangular and is moved by the arrow buttons
to select a parameter that needs to be changed.
By pressing the button “ MENU” you may select the Edit mode for the selected parameter, in this
case the cursor will start flashing. The parameter is changed by the buttons “▲” and “▼”. You
should press the button “ MENU” to accept the change or the button “Esc” to cancel the change.
By pressing any of these buttons you close the Edit mode and return to the Selection mode.
By pressing the button “Esc” in the Selection mode you will finalize the adjustment and store all
changes in the unit’s nonvolatile memory. The unit returns to its usual operating mode.
If you switch off the unit in the interface Adjustment mode, all changes that were made are lost.
The unit and the AlphaMiniCourse Gyrocompass have similar formats of sentences. Transmission
rate in the mode “All Data” is also 1 time per second despite of the frequency setting.
ALPH~TRe N Marine
•

Digital Selector Switch Issue 1.2 Page 12 of 39
DIGITAL SELECTOR SWITCH ALPHAMINICOURSE
4.2 Adjustment mode Input & Output
To enter the interface Adjustment mode press and hold the buttons “◄” and “►” and then switch
the system. On the Control Unit display you will see a Table similar to the one given below:
Figure 4.2.1 – Adjustment mode
The first line of the table of the digital outputs is its title describing its six parameters:
Chn – channel, where All – general tunings (for all channels);
Baud. – transmission speed;
Freq. – transmission rate;
Prec. – heading accuracy;
Chk – checksum;
Message – sentences
In the first line of the table digital input can be selected of maximal 4 heading sources.
Input - incoming heading source sentences
The second line from the bottom is for the speed log adjustment.
The bottom line is for the S-interface adjustment.
Possible values for all parameters are given in the Table 4.2.1
Table 4.2.1 – Control Unit parameters
Parameter Value Function
Baud.
4800
9600
19200
38400
Baud rate
4800 baud (digital output RS232 and RS422)*
9600 baud (digital output RS232 and RS422)
19200 baud (digital output RS232 and RS422)
38400 baud (digital output RS232 and RS422)
Freq.
1
10
20
Transmission rate
1 time per second (digital output RS232 and RS422)
10 times per second (digital output RS232 and RS422)*
20 times per second (digital output RS232 and RS422)
Prec.
.1
.01
Heading decimal place (accuracy)
One decimal place (heading digital output)*
Two decimal places (heading digital output)
Chk
Off
On
Checksum field
No checksum transmitted (digital output RS232 and RS422)*
Checksum transmitted (digital output RS232 and RS422)
ALPH~TRe N Marine

Digital Selector Switch Issue 1.2 Page 13 of 39
DIGITAL SELECTOR SWITCH ALPHAMINICOURSE
Table 4.2.1 – Control Unit parameters (continued)
Message
HDT
HDT+ROT
HDT+VHW
VHW+ROT
THS
THS+ROT
THS+VHW
All
Output sentences
HDT (digital output RS232 and RS422)*
HDT + ROT (digital output RS232 and RS422)
HDT + VHW (digital output RS232 and RS422)
VHW + ROT (digital output RS232 and RS422)
THS (digital output RS232 and RS422)
THS+ROT (digital output RS232 and RS422)
THS+VHW (digital output RS232 and RS422)
All Data (digital output RS232 and RS422)** Input
PGM
4800
9600
19200
38400
Input sentences
Control signal AlphaMiniCourse Gyrocompass***
Baud rate External heading source HDT,HDG,HDM or THS*
Baud rate External heading source HDT,HDG,HDM or THS
Baud rate External heading source HDT,HDG,HDM or THS
Baud rate External heading source HDT,HDG,HDM or THS
Log type
NMEA
100
200
400
Log input
NMEA log*
100 pulse per nautical mile
200 pulse per nautical mile
400 pulse per nautical mile
LOG_OK
Off
On
Disable of RS 232 from the log
Control is off*
Control is on
STEP limit
0
6
12
Limitation of S-interface rate
Without limitation*
Up to 6 °/s
Up to 12 °/s
*factory default settings
** The Digital Selector Switch and the AlphaMiniCourse Gyrocompass have the similar formats of
sentences. Transmission rate in the mode “ALL Data” is also 1 time per second despite of the
frequency setting.
***When AlphaMiniCourse Gyrocompasses are connected their own Control Unit(display) must be
replaced by a blank plate.
ALPH~TRe N Marine

Digital Selector Switch Issue 1.2 Page 14 of 39
DIGITAL SELECTOR SWITCH ALPHAMINICOURSE
4.3 Main Operation Mode
Figure 4.3.1 - Main operation mode
Operating modes and states are given in the Table 4.3.1
Table 4.3.1 Operating modes
System
operating
mode
GC – gyrocompass mode
DG – heading storage mode (Directional Gyro)
State of the
main GC
START – the unit switching on
ALIGN – alignment or operation in the DG mode from the start-up
READY – readiness*
STOP – accelerated gyroscope run-out after the unit switching off
Latitude
input mode
MAN – manual
GPS – from GPS receiver
Speed
input mode
MAN – manual
GPS – from GPS receiver
LOG – from speed log
Status Table of Gyrocompasses states.
Off – totally de-energized
On – switching on and activation
RDY – readiness*
STP – accelerated gyroscope run-out after the gyrocompass or system switching off
SS RDC DSP PWR – failure messages of AlphaMiniCourse Gyrocompass
Heading Table of gyrocompass heading readings.
An asterisk on the left indicates the main gyrocompass.
If instead of heading there is a “no” message, it means that there is no connection
between the unit and the gyrocompass.
The readings start flashing in case the difference is higher than it is allowed.
Maximum
allowable
difference
The value in degrees, from 1 to 9 or ∞ – infinity, i.e. comparison function is off
*indicators RDY and READY appear only in the gyrocompass operating mode, they are flashing
when DG mode is automatically activated for some period of time
012.3 GC READY
Man 52°N
Man 00Kn
Heading of the main GC
State of the main GC
Latitude; N – North
S – South
Speed in knots
Latitude input mode
Speed input mode
*012.3 RDY
012.6 RDY
Off
Off
δ=5
System operating mode Heading Status
Maximum allowable difference
ALPH~TRe N Marine

Digital Selector Switch Issue 1.2 Page 15 of 39
DIGITAL SELECTOR SWITCH ALPHAMINICOURSE
4.4 Power-On
To initialize the Digital Selector Switch operation you shall do the following:
1. Check that there is a nominal 24V DC electrical supply available to the gyro compass.
The acceptable supply range is 9 VDC to 36 VDC.
2. Check the RCU connection on back panel from the AlphaMiniCourse Gyrocompass to Switch
unit of Digital Selector Switch.
3. Press and hold the buttons “◄” and “►” and then switch ON the system.
4. Set your requirements in the Adjustment mode by following the instructions of paragraph 4.2
and when done close with “Esc”
5. The Control Unit will enable the audible alarm for 1 second. The display will show as pictured in
figure 4.3.1.
6. Select operational Gyrocompasses or External heading sources and determine the main source
in the Menu Mode by following the instructions of paragraph 4.5.2.
7. Set the source of latitude information in the Menu mode by following the instructions of
paragraph.4.5.3.
8. Set the source of speed information in the Menu mode by following the instructions of p
paragraph 4.5.4.
9. Set the maximum allowable heading difference in the Menu mode by following the instructions
of paragraph 4.5.5.
10. If needed set Operation mode (Gyro compassing GC and Directional gyro DG) by following
the instructions in paragraph 4.5.6
11. If needed a Drift adjustment can be done once a year after installation by following the
instructions in paragraph 4.5.7
If any failures arise when following the above steps please follow the instructions given
in chapter 5
ALPH~TRe N Marine

Digital Selector Switch Issue 1.2 Page 16 of 39
DIGITAL SELECTOR SWITCH ALPHAMINICOURSE
4.5 Menu mode and Edit mode
You may enter the Menu mode by pressing the button “ MENU”. You will see a cursor in the form
of a highlighted rectangular on one of the items on the display. The cursor can be moved by arrow
buttons to select the parameter that has to be changed.
You may change the selected item in the Edit mode that is activated by pressing the button
“ MENU”, the cursor will start flashing. The parameter is changed with the help of the buttons
“▲” and “▼”. You should press the button “ MENU” to accept the change or the button “Esc” to
cancel the change. By pressing any of these buttons you close the Edit mode and return to the
Menu mode.
4.5.1 Software Information
In Menu mode on the bottom of the display you will find the information about the software
version:
CMPC-x.x RCC-y.y
Where x.x – is the version for the CoMParator Core (Switch Unit) software;
y.y – is a version for the Remote Console Control (Display).
To quit from Menu mode, press the button “Esc”
4.5.2 Selection of Gyrocompass or External heading sources
Selection of the operating gyrocompasses or external heading sources and of the main heading
source is made in the Menu of the main operating mode. Moving the cursor downwards on the
display left field select the channel, from GC1 to GC4. In the Edit mode select one of the GC states:
| ON
* Main
O Completely OFF
The selected state is confirmed by the button “ MENU” and is displayed.
On default all gyrocompasses are ON (factory setting).
You may switch on/off any gyrocompass at any time. The selected configuration of the system will
automatically restore after the unit re-start.
If the main GC is not selected, the first gyrocompass that is switched on will become the main
gyrocompass.
4.5.3 Latitude Correction
The Control Unit of the digital selector switch accept latitude information from an GPS receiver.
However, you may input this information manually, if an GPS source is not available. When using
GPS it will allow automatic corrections to be applied without operator intervention.
Note: Latitude corrections will only apply to AlphaMiniCourse Gyrocompasses set as PGM input.
1) Enter Menu mode as described in section paragraph 4.5
2) Set the desired correction mode (from manual or GPS).
MAN: Latitude input manually, use the buttons “▲” and “▼”. The latitude changes with
increment of 1 degree in the range from 89°N to 89°S.
GPS: Automatic latitude corrections from GPS input. The Speed input will be automatically set
to GPS in case LOG input is not selected.
ALPH~TRe N Marine

Digital Selector Switch Issue 1.2 Page 17 of 39
DIGITAL SELECTOR SWITCH ALPHAMINICOURSE
If there is no valid input from GPS receiver, the display will indicate the alarm NO GPS in
10 seconds.
If the input is not recognized or is invalid during 10 seconds, in the right-hand bottom
corner of the display you will see the alarm ??? GPS (input format is not recognized) or
ERROR GPS (input checksum is invalid).
3) Quit from the Menu mode by the button “Esc”.
If operating latitude is selected manually, remember to change the setting when
necessary.
In medium latitudes, a 10° error in setting the operating latitude will result in compass
error of approximately 0.5°.
4.5.4 Speed Correction
The Control Unit of the digital selector switch accept speed information from an LOG receiver.
However, you may input this information manually, if an LOG source is not available or when using
GPS it will allow automatic corrections to be applied without operator intervention.
Note: Speed corrections will only apply to AlphaMiniCourse Gyrocompasses set as PGM input.
1) Select LOG input in Adjustment mode described in paragraph 4.2.
2) Enter the Menu mode as described in paragraph 4.5.
3) Set the desired correction mode (from manual, GPS or LOG).
MAN: To select automatic speed compensation from log, use the buttons “▲” and “▼”. The
speed changes with increment of 1 knot in the range from 0 to 90 knots.
GPS: Automatic speed corrections from GPS input. The Speed input will be automatically set
to GPS in case LOG input is not selected.
LOG: Automatic speed corrections from LOG input.
If there is no NMEA signal from log, the display will indicate the alarm NO LOG in
10 seconds.
If input is not recognized or is invalid within 10 seconds, the display will indicate the
alarm ??? LOG (input format is not recognized) or ERR LOG (input checksum is invalid).
4) Quit from the Menu mode by the button “Esc”.
Selected speed values and modes are restored after re-started.
If the vessel speed is selected manually, remember to set the average vessel speed and
to change the setting when necessary. On completion of the voyage return the setting to
zero. For a vessel steaming along the meridian, a 5-knot error in speed setting will
generate an error of approximately ± 0.5°.
ALPH~TRe N Marine

Digital Selector Switch Issue 1.2 Page 18 of 39
DIGITAL SELECTOR SWITCH ALPHAMINICOURSE
4.5.5 Allowable heading difference
The Digital Selector Switch is able to monitor the incoming heading sources and compare it with
the main selected source.
Note: Only heading sources in readiness state take part in the comparison.
1) Enter Menu mode as described in section paragraph 4.5
2) Go to δ and use the buttons “▲” and “▼”. The heading difference changes with increment
of 1 degree in the range from 1 to 9 or ∞ to turn it OFF.
3) Quit from the Menu mode by the button “Esc”.
4.5.6 Operation Mode GC or DG
1) Enter the Menu mode as described in paragraph 4.5
2) Select the operating mode.
GC: In the GC mode the connected AlphaMiniCourse operates as a North-seeking unit.
DG: In the DG mode it stores the direction. In this mode you may use the gyrocompass as
a direction indicator all the way up to the poles. If the gyrocompass was settle on North
immediately prior to entering the DG mode, it will continue to provide a useful indication of
the northerly direction for a period, but will not continue to seek North. The length of time
that the direction indication remains valid depends entirely on the gyro drift characteristics.
3) Quit from the Menu mode by the button “Esc”.
The latest operating mode that was set will preserved in the software and is restored after
switching on.
Note: The AlphaMiniCourse set as PGM input will not be north seeking while operating in
the DG mode.
4.5.7 Drift Compensation mode
According to the manual of the AlphaMiniCourse a drift adjustment can be carried out once a year
after installation on the vessel or as well after repair or a long idle time. Drift compensation is
made when vessel is moored to the berth.
Note: Drift adjustment will only apply to AlphaMiniCourse Gyrocompasses set as PGM input.
In 12 hours record the value of the current heading КГ from the Control Unit. By taking the bearing
determine the gyrocompass correction value:
H = Hb – Hg,
where Hb – the vessel heading received as a result of the direction finding, degree;
Hg – the current heading of the vessel in accordance with the gyrocompass, degree.
1) Switch off the Digital Selector Switch control unit.
2) In 5 minutes set the control unit into the drift compensation mode by pressing at first the
buttons “▲” and “▼” and then the button . In this mode the gyrocompass and the
servo system are de-energized.
ALPH~TRe N Marine
[ii

Digital Selector Switch Issue 1.2 Page 19 of 39
DIGITAL SELECTOR SWITCH ALPHAMINICOURSE
The display will show the following:
Figure 4.5.7.1 – drift compensation mode
GC: Connected AlphaMiniCourse set as input PGM
S/N: Serial number of connected AlphaMiniCourse
Hours: Total amount of operational hours of the AlphaMiniCourse
Drift: Automatically calculated drift compensation
Heading: Gyrocompass correction
3) With the help of “▲” and “▼” buttons set the value of correction H. The input range is from
minus 9.9 to 9.9 degrees.
4) Pressing the button “ MENU” set the gyrocompass to standard operating mode with the
new value of the horizontal drift.
5) Pressing of the button “Esc” or the unit switching off do not lead to any correction of the
gyrocompass. After the adjustment the gyrocompass shall operate in the GC mode not less
than 5 hours and then the gyrocompass correction value H. should be determined once
again. The value of correction shall not exceed 0.2. Otherwise the adjustment should be
repeated.
ALPH~TRe N Marine

Digital Selector Switch Issue 1.2 Page 20 of 39
DIGITAL SELECTOR SWITCH ALPHAMINICOURSE
5 FAILURES
When switched on and in the main operating mode the Switch Unit will display the data about any
detected failure of the system. The text message is accompanied by the audible alarm that is
disabled by the button .
If there is no connection between the Control Unit and its Switch Unit, the message “MAIN UNIT
LINK FAILED” will appear on the empty screen of the display.
When the Control Unit and its Switch Unit are linked, you will see information about failures of
every controlled gyrocompass in the left-hand field of the display (in the columns of heading and
status) in the main operating mode.
Failure messages for the main GC as well as system warnings (concerning GPS or log) are shown in
the right-hand bottom corner of the display. See the details in the Table 5.3.1.
5.1 Built-in Test Equipment
The Digital Selector Switch and controlled connected AlphaMiniCourse Gyrocompasses performs a
self-test routine during the initialization sequence and monitors its status continually during normal
operation. Any deviation from normal operation appears as an error message with the indication of
cause on the display.
5.2 Fuses & Replacement
You can easily replace the fuse, this procedure does not require any special skills.
The main fuse of 3.15A is located on the Switch Unit front side, you should take it out of its
receptacle and replace.
Self-healing fuses are located on the backside of PP-028 but do not need to be replaced.
Function of the self-healing safety fuses are described in table 5.2.1.
All fuses described below have a maximal value of 1 Ampere.
Table 5.2.1 – Description of self-healing safety fuses
Number Function
F1 Power input from the mains of 24 V DC
F2 Power input of S-interface (STEP)
F3 Output Step1 of S-interface
F4 Output Step2 of S-interface
F5 Output Step3 of S-interface
F6 Power output 1 of S-interface
F7 Power output 2 of S-interface
F8-F15 Power outputs of periphery, from 1 to 8 correspondingly
ALPH~TRe N Marine

Digital Selector Switch Issue 1.2 Page 21 of 39
DIGITAL SELECTOR SWITCH ALPHAMINICOURSE
5.3 Failure messages and Remedy
Table 5.3.1 – Failure messages and remedy
Message
on the left
Message in
the bottom
right-hand
corner
Description Remedy
no LINK
No connection between the Switch
Unit and the gyrocompass or
external heading source
Check connection between
Switch Unit and heading
source
??? LINK Input format is not recognized
Check input selection and
link or polarity of the
connection.
SS SERVO Servo system failure
Failure due to component
damage and cannot be
corrected in field; is to be
sent to the manufacture or
approved service center
RDC RDC Failure of the heading converter on
the digital board
Failure due to component
damage and cannot be
corrected in field; is to be
sent to the manufacture or
approved service center
DSP DSP Signal processor failure on the
analog board
Failure due to component
damage and cannot be
corrected in field; is to be
sent to the manufacture or
approved service center
PWR POWER Malfunction of inner power supply
Failure due to component
damage and cannot be
corrected in field; is to be
sent to the manufacture or
approved service center
Flashing
heading
Allowable difference of the heading
compared to the readings of other
GC is exceeded
Compare heading with a true
heading mark and if needed
do a drift compensation
NO GPS* Loss or distortion of the signal
from the GPS receiver
Check the link and polarity of
connection
??? GPS* Format of the GPS receiver signal
is not recognized
Adjust the GPS transmission
ERROR GPS* Signal from the GPS receiver is
invalid (wrong checksum)
Adjust the GPS transmission
GPS* No validity check of GPS data Adjust the GPS transmission
NO LOG* Loss or distortion of the log signal Check the link and polarity of
connection
??? LOG* Format of the log signal is not
recognized
Adjust the LOG transmission
ERROR LOG* Signal from log is invalid (wrong
checksum)
Adjust the LOG transmission
LOG* Signal «Log disable» (in case it is
active at GC)
Adjust the LOG transmission
Failure relay is activated in conditions that are marked BOLD in the table.
*Use manual corrections in case in the correct operation cannot be provided by GPS or LOG.
ALPH~TRe N Marine

Digital Selector Switch Issue 1.2 Page 22 of 39
DIGITAL SELECTOR SWITCH ALPHAMINICOURSE
6 TECHNICAL DATA
6.1 Specifications
6.1.1 Power Requirements
Voltage: 24V DC (acceptable range 9 VDC to 36 VDC)
Power consumption: 4 W
CAUTION!
To comply with the requirements of IMO Res. A.694(17) and IMO Resolution
А.821(19), the Digital Selector Switch shall be powered by an uninterruptible power
supply.
6.1.2 Signal Inputs
Heading (4 Max) : RCU signal from Alphaminicourse Gyrocompass or
External Heading source IEC 61162-1/2(2016)
Latitude : IEC 61162 RS232 or RS422 from GPS
Speed : pulse at 100, 200 or 400 per nautical mile from log
IEC 61162 RS232 or RS422 from GPS or log
6.1.3 Signal Outputs
S-type heading : 2 х step-by-step, 6 steps/degree (24V TTL level)
Update 6°/s, 12°/s, unlimited
Serial data outputs : Channel A : 1 х RS232 ; 4 x RS422 ;
Channel B : 1 х RS232 ; 4 x RS422 ;
Channel C : 1 х RS232 ; 4 x RS422 ;
Channel D : 1 х RS232 ; 4 x RS422 ;
Serial data formats : IEC 61162-1/2(2016)
Serial data transfer rate (baud) : 4800 ; 9600 ; 19200 ; 38400
Serial data transfer frequency : 1Hz (1sec) ; 10 Hz (100msec) ; 20 Hz (50msec)
Status/alarm : Ready - NO relay/NC relay
Failure - NO relay/NC relay
6.1.4 Dimensions and Weight
Dimensions Controller (flush mount) : 110mm (H) х 200mm (W) х 95mm (D)
Dimensions Controller : 133mm (H) х 235mm (W) х 125mm (D)
Dimensions Switch Unit : 240mm (H) х 345mm (W) х 135mm (D)
Total weight : 6.5 kg
Controller weight : 2.5 kg
Switch Unit weight : 4 kg
ALPH~TRe N Marine

Digital Selector Switch Issue 1.2 Page 23 of 39
DIGITAL SELECTOR SWITCH ALPHAMINICOURSE
6.2 Data Formats
6.2.1 IEC 61162 Serial Data Formats – General Information
The Digital Selector Switch accepts and transmits asynchronous serial data through RS232 and
RS422 lines using 8 data bits, 1 stop bit and no parity. In each packet the least significant bit
goes the first. The most significant bit of the 8-bit character will always be zero.
Baud rate = 4800
Data bits = 8 (bit D7 is always zero)
Parity = none
Stop bits = one
Figure 6.2 – Serial data format
All data is interpreted as ASCII characters that form IEC 61162 sentences split into individual
fields. All fields, including null fields, are separated by commas.
The IEC 61162 format supports an optional checksum, if included. The checksum occurs as an
additional field immediately before the carriage return line-feed characters. It consists of an
asterisk (*) followed by a checksum derived by exclusive OR-ing the eight data bits of each valid
character preceding the asterisk, but excluding the $ symbol, in the sentence. The absolute value
of the checksum is transmitted in ASCII characters representing the value in HEX. IEC 61162
sentences are transmitted ten times a second.
6.2.2 Inputs
6.2.2.1 IEC 61162 Input Signals
The Digital Selector Switch will accept sentences in both data formats: IEC 61162-1(2016) and
control signal of the AlphaMiniCourse gyrocompass.
The following input sentences of External eading sources are accepted:
❑ HDG as shown in figure 6.3
❑ HDM as shown in figure 6.4
❑ HDT as shown in figure 6.5
❑ THS as shown in figure 6.6
In the following descriptions of input sentences, the Switch Unit uses the data fields marked ‘XXX’
in IEC 61162 sentence. The Switch Unit does not use the fields marked '???' and their descriptions
are included here for completeness only. The Switch Unit will recognize the arriving sentence
format and automatically extract the required data from it.
1 2 3 4 5 6
| | | | | |
$--HDG,x.x,x.x,a,x.x,a*hh<CR><LF>
1) Magnetic Sensor heading in degrees
2) Magnetic Deviation, degrees
3) Magnetic Deviation direction, E = Easterly, W = Westerly
4) Magnetic Variation degrees
5) Magnetic Variation direction, E = Easterly, W = Westerly
6) Checksum
Figure 6.3 - IEC 61162 HDG input sentence structure
Start D0 D1 D2 D3 D4 D5 D6 D7=0 Stop
ALPH~TRe N Marine

Digital Selector Switch Issue 1.2 Page 24 of 39
DIGITAL SELECTOR SWITCH ALPHAMINICOURSE
1 2 3
| | |
$--HDM,x.x,M*hh<CR><LF>
1) Heading Degrees, magnetic
2) M = magnetic
3) Checksum
Figure 6.4 - IEC 61162 HDM input sentence structure
1 2 3
| | |
$--HDT,x.x,T*hh<CR><LF>
1) Heading Degrees, True
2) T = True
3) Checksum
Figure 6.5 - IEC 61162 HDT input sentence structure
1 2 3
| | |
$--THS,xxx.x ,a*hh<CR><LF>
1) Heading Degrees, True
2) Mode identifier
3) Checksum
Figure 6.6 - IEC 61162 THS input sentence structure
GPS Interface (see Table 3.4.1 for connection details)
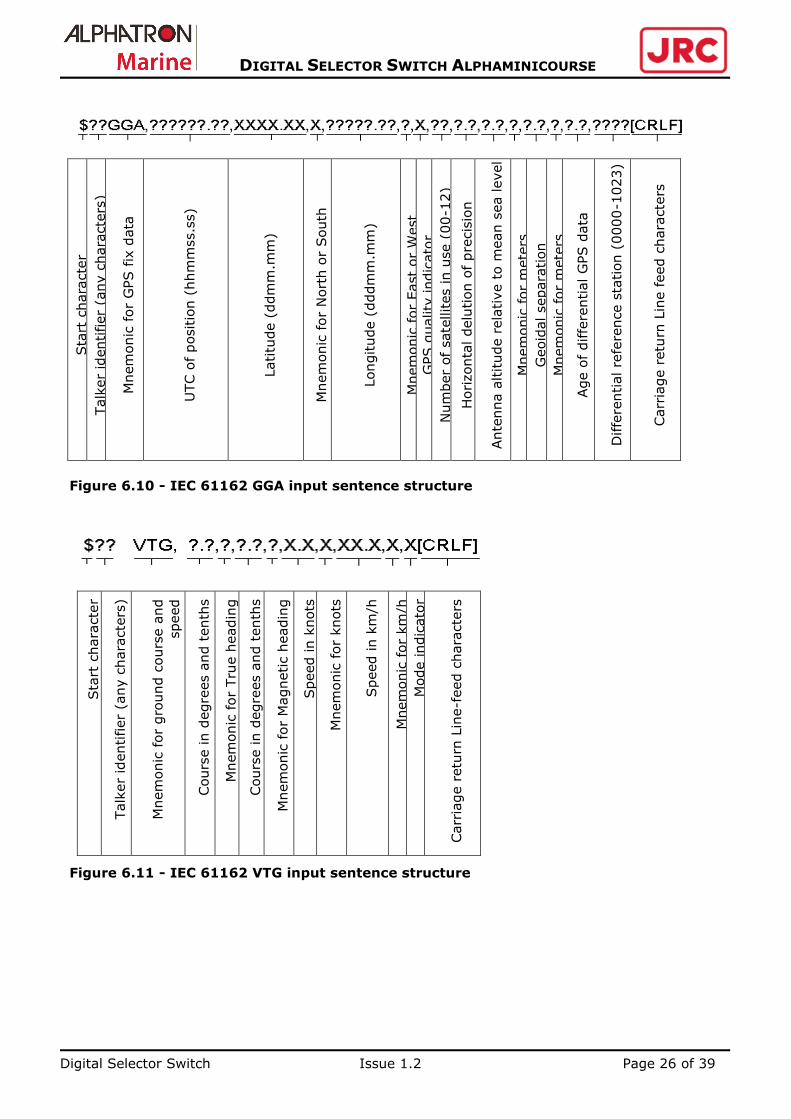
The Alphaminicourse can accept speed, latitude, date and time inputs from GPS in IEC 61162
format using GNS, RMC, GLL, GGA, VTG, VHW sentences.
S
tart
chara
cte
r
Talk
er
identifier
(any c
hara
cte
rs)
Mnem
onic
of
recom
mended m
in G
NSS d
ata
UTC o
f positio
n (
hhm
mss.s
s)
Latitu
de (
ddm
m.m
m)
Mnem
onic
for
Nort
h o
r South
Longitude (
dddm
m.m
m)
Mnem
onic
for
East
of W
est
Mode indic
ato
r
Tota
l num
ber
of
sate
llites in u
se (
0-9
9)
Horizonta
l dilution o
f pre
cis
ion
Ante
nna a
ltitude r
ela
tive t
o m
ean s
ea level
Geoid
al separa
tion
Age o
f diffe
rential data
Diffe
rential re
fere
nce s
tation I
D
Checksum
fie
ld
Carr
iage r
etu
rn L
ine-f
eed c
hara
cte
rs
Figure 6.7 – IEC 61162 GNS input sentence structure
ALPH~TRe N Marine
$??GNS, ?????? .??,XXXX.XX,X, ????? .??, ?,X--X, ??, ? .?, ? .?, ? .?, ? .?, ? .?*, ??[CRLF] TT ----r-- T , ---,--- --, --,--- --r- ~--,--- ~--,- I

Digital Selector Switch Issue 1.2 Page 25 of 39
DIGITAL SELECTOR SWITCH ALPHAMINICOURSE
Sta
rt c
hara
cte
r
Talk
er
identifier
(any c
hara
cte
rs)
Mnem
onic
for
recom
mended m
in G
PS
data
UTC o
f positio
n (
hhm
mss.s
s)
Sta
tus,
A=
valid,
V=
Nav.R
eceiv
er
warn
ing
Latitu
de (
ddm
m.m
m)
Mnem
onic
for
Nort
h a
nd S
outh
Longitude (
dddm
m.m
m)
Mnem
onic
for
East
or
West
Gro
und s
peed in k
nots
Cours
e o
ver
gro
und in d
egre
es
Date
of
fix
Magnetic v
ariation in d
egre
es
Magnetic v
ariation indic
ato
r East
or
West
Mode indic
ato
r
Carr
iage r
etu
rn L
ine feed c
hara
cte
r
Figure 6.8 - IEC 61162 RMC input sentence structure
Sta
rt c
hara
cte
r
Talk
er
identifier
(any c
hara
cte
rs)
Mnem
onic
for
geogra
phic
al la
titu
de a
nd
longitude
Latitu
de (
ddm
m.m
m)
Mnem
onic
for
Nort
h o
r South
Longitude (
dddm
m.m
m)
Mnem
onic
for
East
or
West
UTC o
f positio
n (
hhm
mss.s
s)
Sta
tus
Mode indic
ato
r
Carr
iage r
etu
rn L
ine-f
eed c
hara
cte
rs
Figure 6.9 - IEC 61162 GLL input sentence structure
ALPH~TRe N Marine
$?? RMC, ??????. ?? ,X,XXXX.XX,X, ?????. ?? , ? ,X.X,?.?, ??????,?.?,? ,X[C R L F] T ---,-- ------,--- -~- ---,- -~- T -~- ---, ----,--- ---,--- --,-- ---, ---,
$??G L L,XXXX.XX,X, ?????. ?? , ? , ??????. ?? ,X_X[C R L F] ---, -,--- ------,--- ,-- ---,-- ---,---,
Digital Selector Switch Issue 1.2 Page 26 of 39
DIGITAL SELECTOR SWITCH ALPHAMINICOURSE
Sta
rt c
hara
cte
r
Talk
er
identifier
(any c
hara
cte
rs)
Mnem
onic
for
GPS f
ix d
ata
UTC o
f positio
n (
hhm
mss.s
s)
Latitu
de (
ddm
m.m
m)
Mnem
onic
for
Nort
h o
r South
Longitude (
dddm
m.m
m)
Mnem
onic
for
East
or
West
GPS q
uality
indic
ato
r
Num
ber
of
sate
llites in u
se (
00-1
2)
Horizonta
l delu
tion o
f pre
cis
ion
Ante
nna a
ltitude r
ela
tive t
o m
ean s
ea level
Mnem
onic
for
mete
rs
Geoid
al separa
tion
Mnem
onic
for
mete
rs
Age o
f diffe
rential G
PS d
ata
Diffe
rential re
fere
nce s
tation (
0000-1
023)
Carr
iage r
etu
rn L
ine feed c
hara
cte
rs
Figure 6.10 - IEC 61162 GGA input sentence structure
Sta
rt c
hara
cte
r
Talk
er
identifier
(any c
hara
cte
rs)
Mnem
onic
for
gro
und c
ours
e a
nd
speed
Cours
e in d
egre
es a
nd t
enth
s
Mnem
onic
for
Tru
e h
eadin
g
Cours
e in d
egre
es a
nd t
enth
s
Mnem
onic
for
Magnetic h
eadin
g
Speed in k
nots
Mnem
onic
for
knots
Speed in k
m/h
Mnem
onic
for
km
/h
Mode indic
ato
r
Carr
iage r
etu
rn L
ine-f
eed c
hara
cte
rs
Figure 6.11 - IEC 61162 VTG input sentence structure
ALPH~TRe N Marine
$??GGA, ??????. ?? ,XXXX.XX,X, ?????. ?? , ? ,X, ?? , ? . ? , ? . ? , ?, ? . ? , ?, ? . ? , ????[CR L F] T--r--,-- T T--,- --,- ---,-~ T ---,- T ~ ---r-
$?? VTG, ?.?,?,?.?,?,X.X,X,XX.X,X,X[CRLF] T --,- ---,----- ---,----- ,- -----,-- T ---,- T TT

Digital Selector Switch Issue 1.2 Page 27 of 39
DIGITAL SELECTOR SWITCH ALPHAMINICOURSE
Sta
rt c
hara
cte
r
Talk
er
identifier
(any c
hara
cte
rs)
Mnem
onic
for
vecto
r headin
g a
nd w
ate
r speed
Headin
g in d
egre
es a
nd t
enth
s
Mnem
onic
for
Tru
e h
eadin
g
Headin
g in d
egre
es a
nd t
enth
s
Mnem
onic
for
Magnetic h
eadin
g
Speed in k
nots
Mnem
onic
for
knots
Speed in k
m/h
Mnem
onic
for
km
/h
Carr
iage r
etu
rn L
ine-f
eed c
hara
cte
rs
Figure 6.12 - IEC 61162 VHW input sentence structure
Log Interface (see Table 3.4.1 for connection details)
The Alphaminicourse can accept speed inputs at the log interface in IEC 61162 format using VВW,
VTG and VHW sentences.
Sta
rt c
hara
cte
r
Talk
er
identifier
(any c
hara
cte
rs)
Mnem
onic
for
gro
und s
peed/w
ate
r speed
Longitudin
al w
ate
r speed in k
nots
Tra
nsvers
e g
round s
peed
Sta
tus:
wate
r speed,
A=
valid,
V=
invalid
Longitudin
al gro
und s
peed in k
nots
Tra
nsvers
e g
round s
peed in k
nots
Sta
tus:
gro
und s
peed,
A=
valid,
V=
invalid
Tra
nsvers
e w
ate
r speed o
f ste
rn in k
nots
Sta
tus:
wate
r speed,
A=
valid,
V=
invalid
Tra
nsvers
e g
round s
peed o
f ste
rn in k
nots
Sta
tus:
ste
rn g
round s
peed,
A=
valid,
V=
invalid
Checksum
fie
ld
Carr
iage r
etu
rn L
ine-f
eed c
hara
cte
r
Figure 6.13 - IEC 61162 VBW input sentence structure
ALPH~TRe N Marine
$?? VHW, ??? . ? , ? , ??? . ? , ? ,XX.X,X,XX.X,X[C R L F] ,- --,- ---, ---, ---, T
$?? VBW, ? ? ? ? ? ■ ■ ■ ' ••• ' ■ '
X.X,?.?, X, ?? •• ■' ?, ? .? , ? * hh[CRLF]
-, ---,- -----,---- -----,--- ---,-- ---,-- ----,----- T ----,--- -,- ---,-- -----,--- ---,--

Digital Selector Switch Issue 1.2 Page 28 of 39
DIGITAL SELECTOR SWITCH ALPHAMINICOURSE
Sta
rt c
hara
cte
r
Talk
er
identifier
(any c
hara
cte
rs)
Mnem
onic
for
gro
und c
ours
e a
nd s
peed
Cours
e in d
egre
es a
nd t
enth
s
Mnem
onic
for
Tru
e h
eadin
g
Cours
e in d
egre
es a
nd t
enth
s
Mnem
onic
for
Magnetic h
eadin
g
Speed in k
nots
Mnem
onic
for
knots
Speed in k
m/h
Mnem
onic
for
km
/h
Mode indic
ato
r
Carr
iage r
etu
rn L
ine-f
eed c
hara
cte
r Figure 6.14 - IEC 61162 VTG input sentence structure
Sta
rt c
hara
cte
r
Talk
er
identifier
(any c
hara
cte
rs)
Mnem
onic
for
vecto
r headin
g a
nd w
ate
r speed
Headin
g in d
egre
es a
nd t
enth
s
Mnem
onic
for
Tru
e h
eadin
g
Headin
g in d
egre
es a
nd t
enth
s
Mnem
onic
for
Magnetic h
eadin
g
Speed in k
nots
Mnem
onic
for
knots
Speed in k
m/h
Mnem
onic
for
km
/h
Carr
iage r
etu
rn L
ine-f
eed c
hara
cte
r
Figure 6.15 - IEC 61162 VHW input sentence structure
ALPH~TRe N Marine
$?? VTG, ?.?,?,?.?,?,X.X,X,XX.X,X,X[CRLF] T ---, ---,----- ----,-- ---, -r- T --,- ---, TT
$?? VHVV, ??? . ? , ? , ??? . ? , ? ,XX.X,X,XX.X,X[C R L F] -,,- T T T T

Digital Selector Switch Issue 1.2 Page 29 of 39
DIGITAL SELECTOR SWITCH ALPHAMINICOURSE
6.2.2.2 Pulsed Input
The Digital Selector Switch can accept a speed input in the form of pulses occurring at a
frequency of 100, 200 or 400 per nautical mile as selected in Adjustment mode
The Switch Unit determines the vessel speed by reference against the microprocessor timing
circuits. The speed pulses do not need a particular mark/space ratio, but they should have
amplitude from 5 to 10 Volts.
6.2.3 Outputs
6.2.3.1 IEC 61162 Output Signals
The Digital Selector Switch can output serial data through RS232 and RS422 serial lines in
IEC 61162-1(2016) format. Dependent on the settings, the output may contain either:
1. Heading – as described below, OR
2. Heading and Rate of turn – as described below, OR
3. Heading and Speed – as described below.
4. Speed and Rate of Turn
5. All Data
❑ For Heading information the HDT and THS format sentence is used. At the DIP-switch you
may set the resolution for the output to one or two decimal places. Refer to Figure 6.17 and
figure 6.21 for a description of this output format sentences.
❑ For Rate of Turn the ROT format sentence is used. Refer to Figure 6.18 for a description of
this output format.
❑ Speed information is transmitted in VHW format sentence, if the gyro compass is configured
for manual or log input. VHW sentence also contains the heading that is inserted with the
resolution as set by the DIP-switch. Refer to Figure 6.19 for a description of this output
format.
❑ If the All Data mode is selected sentences HDT, ROT,THS, and additional sentences with
coordinates and speed are transmitted. Alarm sentences ALR, ALF and ALC will also be
transmitted. The Data package is transmitted with frequency 1 Hz despite of the
transmission channel settings.
If the GPS mode is on, sentences received from GPS are transmitted as additional: RMC, RMA,
GLL,GGA, GNS, ZDA, VBW, VHW, VTG. Talker identifier (that follows the symbol ‘$’) is changed
for “HE”. Presence of checksums in transmitted sentences is determined by their presence in
received sentences despite of transmission channel settings.
In GPS mode additional sentences look as follows:
$HEGLL, xx00, x,,,, A, M[CRLF]
$HEVTG, xxx.x, T,,, x . x, N, x . x, K, M[CRLF]
Figure 6.16 - IEC 61162 additional sentence structure
Mnemonics for North or South
Latitude (dd)
Speed in km/h
Heading
Speed in knots
ALPH~TRe N Marine
I I

Digital Selector Switch Issue 1.2 Page 30 of 39
DIGITAL SELECTOR SWITCH ALPHAMINICOURSE
Accuracy of heading and presence of checksums is determined by transmission channel settings.
Sta
rt c
hara
cte
r
Talk
er
identifier
(any c
hara
cte
rs)
Mnem
onic
for
Tru
e h
eadin
g p
resent
Headin
g in d
egre
es a
nd t
enth
s
Mnem
onic
for
Tru
e h
eadin
g
Carr
iage r
etu
rn L
ine-f
eed c
hara
cte
r
Figure 6.17 - IEC 61162 HDT output sentence structure
Sta
rt c
hara
cte
r
Talk
er
identifier
Mnem
onic
for
Rate
of
Turn
Rate
of tu
rn °
/m (
negative f
or
port
turn
)
Sta
tus:
A=
valid,
V=
invalid
Carr
iage r
etu
rn L
ine-f
eed c
hara
cte
r
Figure 6.18 - IEC 61162 ROT output sentence structure
ALPH~TRe N Marine
$HEH DT ,XXX.X,X[C R L F] ' --,-- ---,----- ---,
$HEROT,X.X, X[CRLF] T -,--- -----,---- ---,--- T

Digital Selector Switch Issue 1.2 Page 31 of 39
DIGITAL SELECTOR SWITCH ALPHAMINICOURSE
Sta
rt c
hara
cte
r
Talk
er
identifier
(any c
hara
cte
rs)
Mnem
onic
for
vecto
r headin
g a
nd w
ate
r
speed
Headin
g in d
egre
es a
nd t
enth
s
Mnem
onic
for
Tru
e h
eadin
g
Headin
g in d
egre
es a
nd t
enth
s
Mnem
onic
for
Magnetic h
eadin
g
Speed in k
nots
Mnem
onic
for
knots
Speed in k
m/h
Mnem
onic
for
km
/h
Carr
iage r
etu
rn L
ine-f
eed c
hara
cte
r
Figure 6.19 - IEC 61162 VHW output sentence structure
6..2.3.2 IEC 61162 Sentence with Checksum
If the optional checksum is to be sent with any of the above IEC 61162 sentences, it is added as
an extra field before the carriage return character as shown in Figure 5.16.
Optional checksum
Figure 6.20 - IEC 61162 sentence with optional checksum
The checksum consists of an asterisk followed by the checksum calculated by exclusive OR-ing
the eight data bits of each valid character preceding the asterisk in the sentence, but excluding
the $ symbol. The Alphaminicourse transmits the absolute value of the checksum in ASCII
characters representing the value in HEX.
ALPH~TRe N Marine
$?? VHW, ??? .?, ?, ??? .?, ?,XX.X,X,XX.X,X[CRLF] -, ---,- ------,-- T T -----,-- T T
$HEH DT ,XXX.X, T*hh[C R L F] -,-

Digital Selector Switch Issue 1.2 Page 32 of 39
DIGITAL SELECTOR SWITCH ALPHAMINICOURSE
In accordance with the standard IEC 61162-1:2010 for the digital heading transmission it is
recommended to use the THS sentence instead of HDT.
$HETHS ,XXX.X, a*hh [CRLF]
Note – Mode identifier
A = autonomous
E = computed (accurate trajectory calculation)
M = manual input
S = simulation mode
V = data not valid (including idle mode)
Figure 6.21 - IEC 61162 THS sentence structure
In the mode All Data the gyro compass failures are transmitted as following:
$HEALR, ,240, A ,x, sss<CR><LF>
$HEALF, 1, 1, 0, ,B, ,x, ,240, y, 1, 0, sss,<CR><LF> $HEALC,1 ,1 ,0 ,n , {,240, y, 1}…<CR><LF>
Where x - acknowledgement indicator (V – No, A – yes);
y – failure code (see Table 5.1);
sss – failure textual description (see Table 6.1);
n – number of failures;
{} – identifier of one failure in the list of failures;
… - list of failures (if more than one).
Figure 6.22 - IEC 61162 ALR, ALF, ALC outputs sentence structure
Table 6.1 – Failure codes and textual descriptions
Code Text Description
1 Servo System Servo System failure
2 DSP Signal processor failure
3 RDC Angle-to-digit convertor failure
4 Power Failure of internal power supply
5 GPS No GPS signal or invalid data
6 LOG No LOG signal or blockage
True Heading in degrees
Mode identifier
ALPH~TRe N Marine

Digital Selector Switch Issue 1.2 Page 33 of 39
DIGITAL SELECTOR SWITCH ALPHAMINICOURSE
7 WARRANTY REGISTRATION FORM
ALPH~TRe N Marine
Warranty Registrati,on Form1
ALPH~TRe N Telephone: +31(0)10-4534000 P.O. Box 2.1003
Telefax : +31 (0110~4534030 3001 AA Rotterdam
Sit e; www.alphat ronmarine.com The Net herlands
Email: alpha [email protected]
Instal l. Companyit<: Te lephone:
Ema il:
A.dress:
Harbour:
Vesse l Name* :
Vesse l Type:
Technician: Installat ion Date* : DD I MM I yy
I I System*: Type*:
Consisting of/ configu rat ion system* Se rial number*
Connected t o:
Remarks :
NOTE: To validate the warranty oUhis product, please sen.d this cl'ocum ent viia e-maill, fax or
post witlh in two weeks after installation.
Signatu re: I Date* : DD I MM I y y
I I I I I
Digital Selector Switch Issue 1.2 Page 34 of 39
DIGITAL SELECTOR SWITCH ALPHAMINICOURSE
8 CONNECTIONS FORM
4
5 +24VDC
6 P.5231
5 t 24VDC
6 115231
ALPH~TRe N Marine
Digita l Selector Switch Connection IForm
1 '124VDC
2 C,.DC
3 ¾24VDC
4 C,.DC
5 ¾24VDC
6 C,.DC
Pim Circlit connection cable 1 STl:Pl
2 STEP2
3 STEP3
4 +2iMlC
P,in Cimilt oonneaion 1 11:CC
2 RNO
3 RNC
4 FCC
5 FNO
6 FNC
2 -RS422 jAij
4 -RS4U IA21
Pirn Cima! connection cable
P,in Cimilt oonneaion 1 +2.4\IOC 2
cal>le
!'in, Circuit oonneaion cal>le 1 +2-olV!lC
3, GM)
cable
cable

Digital Selector Switch Issue 1.2 Page 35 of 39
DIGITAL SELECTOR SWITCH ALPHAMINICOURSE
9 INPUT & OUTPUT SETTINGS FORM
u ai=: -,
z a.,
• ·= a:::
Ji,.,
~~
I a.. ...J ~
TH
S
TH
S+R
OT
TH
S+VH
W
AU
■,MIIHI■
□ □
□
VH
W+
RD
T
0 T
HS
□
TH
S+R
OT
□
TH
S+
vH
W □
ALL
□
TH
S
TH
s+R
OT
TH
s+V
HW
AL
L
ST
EP
Limit
0 □
6 □
12 □
VH
W+
RD
T
TH
S
TH
S+R
OT
TH
s+V
HW
AL
L
PG,v,

Digital Selector Switch Issue 1.2 Page 36 of 39
DIGITAL SELECTOR SWITCH ALPHAMINICOURSE
APPENDIX A – Connection Diagram Switch Unit
r---
----
----
----
----
----
----
P -
----
----
---
r-U
L7
D
UU
I U
rr-U
LO
D
UU
I u
I
r X5 I
Circ
uit
Pin
Pin
Circ
uit
XP3
~----J
XT2
+24
V
1 1
RS42
2(A1
) XT
4 -2
4 V
2
2 RS
422(
A1)
Circ
uit
Pin
Pin
Circ
uit
IN
+IN1
RS42
2 1
1 -R
S(A)
24
V +2
4 V
3
3 RS
422(
A2
+24
V
5 4
RS42
2(A2
I
+IN1
RS23
2 3
2 + R
S(B)
-IN1
RS42
2 2
3 GN
D
GC1
-24
V
4 XT
7 -2
4 V
6
Pin
Circ
uit
-IN1
RS23
2 4
4 ON
IOFF
XT3
5 +2
4 V
XT
2 1
RS42
2(A3
Circ
uit
Pin
2 RS
422(
A3
Circ
uit
Pin
6 RS
232
TTL
1111
+LOG
1
XTS
STEP
1 1
3 RS
422(
A4
-LOG
2 I
STEP
2 2
4 RS
422(
A4
Pin
Circ
uit
IN2
RS42
2 3
1 -R
S(A)
ST
EP3
3 m
l RS
422
RS42
2
+24V
4
Pin
Circ
uit
+IN2
RS23
2 5
2 +R
S(B)
II
IN2
RS42
2 4
3 GN
D
STEP
XT
3 1
+RS4
22(B
1) GC
2 Ci
rcui
t Pin
2
-RS4
22(B
1)
-IN2
RS23
2 6
4 ON
IOFF
Im
5 +2
4 V
ST
EP1
1 3
RS42
2(B2
STEP
2 2
4 RS
422(
B2
Circ
uit
Pin
6 RS
232
-RS
1 ST
EP3
3 XT
9 XT
6 +2
4V
4 Pin
C
ircui
t +R
S 2
Pin
Circ
uit
Cons
ole
GND
3 1
-RS(
A)
XT4
1 RS
422(
B3
Circ
uit
Pin
2 RS
422(
B3
ON/O
FF
5 2
+RS(
B)
+RS2
32 (A
) 1
3 RS
422(
B4
+24
V
4 3
GND
GC3
-RS2
32 (A
) 2
4 RS
422(
B4
X7
IN 2
4V
XT1
4 ON
/OFF
+R
S232
(B)
3 Pin
Ci
rcui
t Pin
5
+24
V
-RS2
32 (
B)
4 -
1 +2
4 V
1
6 RS
232
-'-
2 -2
4 V
2
RS23
2 XT
S XT
7 -- -
3 ~
3 Pin
C
ircui
t Ci
rcui
t Pin
-=-
+RS2
32 (
() 1
READ
Y !F
AIL
1 -R
S(A)
-R
S232
(()
2
2 + R
S(B)
+R
S232
(D)
3 3
GND
GC
4 -R
S232
(D)
4 4
ONtO
FF
-5
+24
V
''
XT1
J //
XS1
6 RS
232
" ~
XT2J
//
XS2
I- X
C
"' ~
a:
..-
-- -=-XP
1 >
_,.
~
>
~co -~
~
XP2
,_x
1
-Iii
::,
C)
u s: -
"' ~
I
I
XT10
XT
24 ~i
j ____
Circ
uit
Pin
+RS4
22(C
1)
1 XT
15 Pin
Circ
uit
-RS4
22(C
1)
2 1
+24
V
RS42
2(C2)
3 2
-24
V
RS42
2(C2)
4 XT
16 XT
11 Pin
C
ircui
t C
ircui
t Pin
1
+24
V
RS42
2((3
) 1
2 -2
4 V
RS
422(C
3) 2
RS42
2(C4
3
XT17 Pin
C
ircui
t RS
422(
(4
4 1
+24
V
XT12
2 -2
4 V
Ci
rcui
t Pin
+RS4
22(O
1)
1 XT
18 Pin
Circ
uit
-RS4
22(O
1)
2 1
+24
V
RS42
2(D2
3 2
-24
V
RS42
2(D2
4
XT19
xrn
Pin
Circ
uit
Circ
uit
Pin
1 +2
4 V
RS
422(
D3
1 2
-24
V
RS42
2(D3
2
RS42
2(D4
3 XT
2 Pin
Circ
uit
RS42
2(D4
4
1 +2
4 V
XT
14 2
-24
V
Circ
uit
Pin
RC(
1 XT
21 Pin
Circ
uit
RNO
2
1 +2
4 V
RN
C
3 2
-24
V
FCC
4
FNO
5 XT
2 Pin
Circ
uit
FN(
6 I 1
+24
V
2 -2
4 V
"'
~ ~~
I- X
C
C: -
"'
>
·~
c::,
--111
1
:z
u "'
IN 2
4V
OUT
24 V
----
----
----
--, I
------,
Powe
r h
Read
14
Failu
re
1 1
I ..l
6
..l
15
..l
l2
PP-0
37 Bo
ard
-------,
----
, I -:
:i
,17
± ;)';
-, ,
7 -r-
~T
I _
__
_ .J
I I I I ,:
'7
;)';
-Y I I I I
t3
XJ<
~4
~-J
k ➔:J
~2
I 1 ~ K
eybo
ard
XI 'Y PP
-D43
Boa
r d
XP2
xii Pin
Ci
rcui
t
I R5
422(
A-)
2 R5
422(
8+)
J 4 5
XPI
I
Dis
play
CN
2
GND
ON/O
FF
+24
V
'.:b.
r ""C I
s:~
~
;o
5·.
(I)
z
t.
;a
n,

Digital Selector Switch Issue 1.2 Page 37 of 39
DIGITAL SELECTOR SWITCH ALPHAMINICOURSE
APPENDIX B – Dimensional drawing of Control Unit
ALPH~TRe N Marine
C> C> N ::= ::= co
a::::::Il A.IPtOORON
~ (Q)
(ITD ~ a::::::Il
Fron t View 20 0
DIGITAL SELECTOR SYl1TCH ALPHAMINI COU RSE
11
©® ee BJ G 6§d l!::::,*c::::!I
Back View
Product Digital SelKaif Switch AJ'l-t,J'llWNI ltemCodecG--0073E3-~~ SErialNo: ,!""'~ Cootrol lkl it PKT-51 No: j Production Date: IP 'Il
• ce: C~pm Sa!, m• OrsGnee: 0,5 m . 0054!~~ Power:2◄ VDC Ii] ~
@
\ Grnood Coooec h oo M6
Side View
©
a::::::Il
© (Q)
(Q) © a::::::Il

Digital Selector Switch Issue 1.2 Page 38 of 39
DIGITAL SELECTOR SWITCH ALPHAMINICOURSE
APPENDIX C- Dimensional drawing of Switch Unit for Bridge mounting
ALPH~TRe N Marine
4x 06m1m
4x MS
CO N 0 O" co "°
,Q,
Cut- Out l82
1'62
-'-----------,0
~t 1.1"1
::;:
lI: 1.1"1 (Y7
Det ail- 1
Bottom View
Cable Gland </J5 - 12mm
43mm + Pane l th ickness * adjust t he nut t o t he proper
M5x60
washer M5
* Nut M5
1.1"1
N ...-t
0 0
0
0
Bridge face pa nel Min. 3mm
Ground [ onnedion M6

Digital Selector Switch Issue 1.2 Page 39 of 39
DIGITAL SELECTOR SWITCH ALPHAMINICOURSE
APPENDIX D- Dimensional drawing of Switch Unit
ALPH~TRe N Marine
A.PH~
D POWER
D READY
D FAILURE
Front View
DIGITAL SELECTOR SWITCH
Mounting 312
330
Bo t t om View l it open
Ground (onned ion M6
Bottom View
@o o o o o o ~@@ ,@@,@
<ti6mm Side View
132
( ab le Gland 7x 8.5-14mm
( ab le Gland 11x 5-12mm