Saccadic updating of object orientation for grasping movements
Upload
independentCategory
view
2download
0
Abstract— Measuring grasping actions and forces in human infants is an important issue in many clinical contexts; by analyzing infants’ typical development in unstructured environments it is possible to define standards against which to evaluate any condition of abnormal motor development. This work focuses on the development of biomechatronic tools, in particular a “little gym” composed by a set of instrumented toys equipped with a variety of sensors designed for the assessment/stimulation of motor actions of the upper limb of infants between 4 and 9 months of age. The aim of this work is to develop a mechatronic platform able to measure and stimulate infants’ movements during the acts of reaching and grasping. In order to check the whole functionality of the mechatronic toys, in terms of working range, sensitivity, acceptance by the infants, some experimental tests have been performed with 7 infants aged from 4 to 9 months, for a total number of 350 measurements. The results confirm the hypothesis that the platform represents a valid tool for continuous monitoring and quantitatively measuring infants’ manual function and motor development, without being distressful for the infant.
I. INTRODUCTION EASURING grasping actions and forces in human
infants is an important issue in many clinical contexts; by analyzing infants’ typical development in unstructured environments it is possible to define standards against which to evaluate any condition of abnormal motor development. A possible application of this paradigm is identifying atypical development of infants with early brain damage, such as hemiplegia. Recent studies [1]-[3] with infants with early brain damage confirm that the process of neural reorganization is heavily influenced from birth by the interaction between motor output and residual somato-sensory feedback, with mechanisms that are largely unknown; and it is possible to obtain motor improvements through an early therapy with specific exercises in infants. A window for early strategies of intervention is thus available from the first weeks of life, which can potentially be effective in directing the natural history of the disease towards a better functional outcome. In this framework, the development of biomechatronic tools
Manuscript received April 2, 2010. F. Cecchi is with the ARTS Lab, Scuola Superiore Sant’Anna, Pisa, Italy (phone: +39-050-883457; fax: +39-050-883497; e-mail:
[email protected]). S. M. Serio, M. Del Maestro, C. Laschi, P. Dario are with the ARTS Lab,
Scuola Superiore Sant’Anna, Pisa, Italy.
for the use in neuropediatric disorders could represent a valid means not only to objectively assess motor impoverishment or sensitivity to therapy, but also to experiment new therapeutic interventions based on controlled sensory stimulation in minimally structured and infant-oriented environmental conditions. In this respect, a set of instrumented toys equipped with sensors for behavioural analysis during infancy has been developed and successfully applied [4]-[5]. This work focuses on the development of biomechatronic tools, in particular a “little gym” composed by a set of instrumented toys equipped with a variety of sensors designed for the assessment/stimulation of motor actions by the upper limb of infants between 4 and 9 months of age. The aim of this work is to develop a mechatronic platform able to measure and stimulating infants’ movement during the acts of reaching and grasping and test the platform with clinical trials with seven infants in order to validate the platform as a useful tool for monitoring infants’ motor development.
II. MATERIALS AND METHODS
A. Technological and clinical specifications Technologies for the study of devices for monitoring
infants’ motor development should comply with strict functional and operative requirements, not fully met by current state-of-the-art technologies [6].
As already said, the platform presented is based on the concept of “gym” for infants, as commercially available and usually adopted as interactive toys. A purposive “biomechatronic gym” has been developed by integrating sensors and visual and auditory stimulations to the usual gym structure and hanging toys, so that the infants’ actions on the gym devices can be monitored, measured, and stimulated.
Small size, light weight, high sensitivity, robustness and low cost are among the key features to take into account during the technical design of the toys: - the sensory system should be small enough to be embedded inside a toy, to be handled by 4 to 9 month-old infants;
- the weight of the sensory system should be small enough not to affect the infants’s grasping ability;
- the sensors should be very sensitive, to detect palmar and precision grasps by 4 to 9 month-old infants.
Design and development of sensorized toys for monitoring infants’ grasping actions
Cecchi F. Member, IEEE, Serio S.M., Del Maestro M., Laschi C. Member, IEEE, and Dario P. Member, IEEE
M
Proceedings of the 2010 3rd IEEE RAS & EMBSInternational Conference on Biomedical Robotics and Biomechatronics,The University of Tokyo, Tokyo, Japan, September 26-29, 2010
978-1-4244-7709-8/10/$26.00 ©2010 IEEE 247

For evaluating the pressure range, a commercial balloon dynamometer has been used with a sample of 10 2-year-old infants and a range of 0-3 psi has been found. These data are partially confirmed by some works reported in literature [9]-[14] and a final range of 0-5 psi in terms of hand pressure and 0-20N in terms of forces exerted [15]-[16] have been chosen as appropriate for this application;
- the toys should be very robust to be used several times by infants, running the risk of being banged or thrown away;
- the toys should be safe in terms of internal voltages, electrical insulation, temperature reached, etc [17].
- it is important taking into account the total cost of the toys in order to keep it low enough to develop relatively low-cost devices, requiring minimally structured environments, for a screening of a large number of infants. We started our work by analyzing several commercial
toys for 4 to 9 month-old infants, in terms of shape, colour, fabric. The toys should be interesting and attractive to infants and this requirement can be achieved through: i) use of primary colours (different stripes of contrasting colours), ii) nice and familiar shape (e.g. simple shapes like rattles or cubes, animals) and iii) attractive and pleasant-to-touch fabric. It has been demonstrated [9]-[10] that objects with smooth or rough substance induce a different level of active manipulation (higher pressure and relatively higher frequency signals on soft toys than on rough or rigid ones).
From these considerations, the sensorized toys should be soft toys, like puppets, derived from commercial toys. Moreover the shapes should encourage and suggest some type of grasping instead of others. This last feature is called affordance [12], i.e. the shape of the object suggests the use to be done with it. In our case, affordance can, in part, guide the infant to perform certain types of grasping instead of others.
In order to reduce the number of ‘free’ variables (i.e. the infant’s choice of orientations, grasping patterns, movements when playing with toy) three different toys have been chosen as sensorized toys: a soft toy shaped as a little cow, a soft toy shaped as a ring and a soft toy shaped as a flower. These specific toys have clear affordances and offer only a limited number of grasping hand configurations,[13] in particular the first toy, the little cow, encourages palmar grasp performed on the cow’s body and digital grasp (precision grasp) on the cow’s legs; differently, a ring shape encourage only palmar grasp and a flower shape encourages precision grasp on each petals. In this way it is easier dimensioning the toys and choosing purposive sensors.
A. Gym design This new set of instrumented toys equipped with a variety
of sensors is intended to be hung to a specific structure. The structure of the gym has been purposely designed, so to be adjusted (in height, length and geometry) to different infant‘s anthropometrics and to give visual and auditory stimulation to reinforce the infant‘s play. Furthermore, the structure has been designed to be purely attractive to the
children in terms of shape, and colours. Infants are placed in a sitting posture on the base of their postural control (age dependent). The toys are hung to a specific module, purposively designed to be shifted along the gym structure in order to allow performing different tasks (central or lateral task). In this module audio-visual feedback are also present in order to stimulate the infants and give a reward.
B. Toy design The cow toy is 100mm long and 40mm large and these
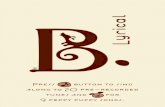
dimensions perfectly fit with infants hand dimension constraints [11]. Cow’s arms are 25mm x 25mm (see Fig. 1a). The little cow has stripes of contrasting colours on its body and two pink circles on its arms for encouraging infants in playing with the hanging toy. The flower toy is 85mm long and 85mm large and each petal is 25mm x 20mm (see Fig. 1b). In the flower toy, contrasting colours have been used, too; in particular the flower has a black centre and white petals with red spots, to attract the infants attention on the petals. The ring toy has the following dimensions: the total diameter is 93mm while considering the section, the diameter is 15mm (Fig. 1c). The toy has a fabric cover with contrasting yellow and black stripes.
C. Sensors After a careful analysis of commercially available force
and pressure sensors, piezoresistive pressure sensors and FSR® sensors have been chosen as appropriate sensors for this application due to their sensitivity, working range, activation threshold, dimensions and cost. Thus, the hanging toys are equipped with two kinds of sensors:
1) the main body of the cow and the ring toy contain one piezoresistive pressure sensor, measuring pressure applied by infant's grasping actions, in the range 0-5 psi. It is based on four active element piezoresistive bridge constructions and it uses atmospheric pressure as a reference.
2) some of the toy particulars, small parts attached to the main body (e.g. cow’s arms and flower’s petals) contain one flexible Force Sensing Resistors (FSR®) sensor each, able to measure the force applied in the direction normal to its surface, in the range of 0-20 N. FSR® are a Polymer Thick Film (PTF) devices which exhibit a decrease in resistance with an increase in the force applied to the active surface [18]. While FSR® sensors can be directly embedded inside the toy; the piezoresistive pressure sensor has to be connected to an air chamber in order to measure internal pressure variations. When the toy is not squeezed by the infant the pressure measure is equal to atmospheric pressure,
100
40
25
25
(a) 25 25
85
85
(b) 93
15
(c) Fig. 1:sensorized toys, a) cow, b) flower and c) ring (dimensions in mm)
248

while when the infant squeezes the toy the pressure measured by the sensor is proportional to the pressure exerted by infant’s hand).
D. Materials Taking into account the clinical specifications about
materials, we studied different commercial elastomers in terms of hardness, resistance, viscosity and manufacturing, looking for materials with high compliance, easy manufacturing, elasticity, and easy return to original form. From these specifications we excluded acrylic materials and polyurethane and we chose silicone as material for the air chamber.
In this work, three different types of silicone have been analysed: DragonSkin platinum care silicone rubber (Shore A 10)
by Smooth on inc; GLS 40 (Shore A 11) by Prochima; GLS 50 (Shore A 18-20) by Prochima. Moreover, the three types of silicone differ in terms of
shore coefficient, viscosity and also pot life and demolding time. Table I shows the main characteristics of the silicones. In order to choose the best silicone for our application we had to consider also the final shape of the pressure chamber. A purposive mould has been designed and developed (made in epoxy resin) for manufacturing the silicone chambers of the cow and ring toys. In order to evaluate the best silicone for our application different chambers made by different silicones have been manufactured and the best solution has been identified through tensile compression tests for investigating mechanical and electrical behaviours.
E. Electronic Unit To allow acquiring signals coming from sensors, a
specific acquisition path has been designed adopting simple hardware and software solutions. It is important to underline that for this first generation of toys we adopted a shielding wired solution. This choice does not compromise one of the major design requirements that is the ecological operational conditions. The gym setting allows to hide the cables in the structure and so let the infant’s action space free.
The acquisition path is composed by: i) force and pressure sensors, ii) conditioning circuitries (different for each type
TABLE I SILICONE CHARACTERISTICS
Silicone DragonSkin GLS40 GLS50 Viscosity 23 Pa·s·cps 28 Pa·s 30 Pa·s Shore A 10 11 18-20
Elongation at break %
1000 380 400
Catalyst % or mix ratio by weight
2 components 1:1
T-30 5% T-30 5%
Pot life 20 min 90 min 90 min Demold time 5 hours 18 hours 18 hours
Colour Translucent Beige Beige
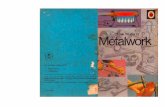
of sensors) that amplify and filter signals, iii) National
Instruments NI DAQ acquisition board (sampling rate 500Hz) and iv) a PC with a LabVIEW™ interface (Fig. 2).
The different conditioning circuits schematics present some common features: - Vcc=5V stabilized (fixed) through voltage regulator L
7805 CV; - Operational Amplifier TLV 2462 ID used both as buffer
as well as signal amplifier (low-power rail-to-rail input/output operational amplifiers specially designed for portable application);
- low-pass filter with cut-off frequency of 40Hz for removing power-line frequency (50 Hz) components and exploiting sensors dynamics; the choice of the frequency range is based on some works reported in literature where infants grasping actions have signals with frequency that does not come through 4Hz [14].
As already said, the sensor is based on four active element piezoresistive bridge constructions and signal coming from the sensors is amplified through an operational amplifier in differential configuration with a fixed gain (G=70). The conditioning circuit used for FSR® force sensors (B) is composed by: i) a capacitance C (for noise filtering due to the high sensor sensitivity), ii) an adjustable voltage divider (in order to set force range), iii) a buffer (to reduce impedance) and iv) an operational amplifier in non-inverting configuration with a variable gain (GMAX=20) for a final signal amplification. In order to validate each design choice, preliminary laboratory tests are required.
III. SENSOR CHARACTERIZATION Once the sensorized toys have been developed, a
calibration procedure is necessary in order to characterize the mechanical and electrical properties of the devices. Characterization tests are divided in two phases: the piezoresistive pressure sensors are evaluated with a dynamic tensile characterization with an Instron Dynamometer while the FSR sensors are evaluated through a static calibration. As already said, three different commercial silicones have been used for developing the air chambers of the ring and cow toys; tensile tests are useful for analysing mechanical and electrical behaviour of each chamber and consequently choosing the best one for our application.
Due to the complexity of reproducing infant’s grasping actions on the toys, it is possible to approximate the contact area of the infant’s hand with an area of 4cm2, equal to the effective surface during infant’s hand compression (dimensions from [11]), and to approximate the infant’s
NI – DAQ Acquisition
Pressure Sensor PC – LabVIEW™
InterfaceForce
Sensors
Conditioning Circuitry – A
Conditioning Circuitry – B
Fig. 2: Acquisition system block diagram. The block of Conditioning
Circuitry is different for pressure (A) and force (B) sensors
249

actions with a longitudinal compression of the silicone chamber, like fingers movements over the palm. The chamber was placed flat under the load cell and the probe was used for the compression test. In particular, cyclic compression tests with different compression velocities (5 - 10 - 20 - 30 mm/min), cyclic tests and a calibration procedure have been performed.
IV. RESULTS The study presented shows meaningful results of stress-
strain analysis as a function of the type of silicone and ramp velocity. Due to the viscoelastic nature of the silicone, hysteretic behavior and linearity are investigated.
A. Dependence on silicone type: linearity Once chosen chamber thickness (4mm), a quantitative
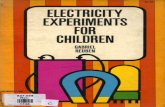
study on the linearity of stress-strain curve has been performed for the different silicones in order to characterise the mechanical behaviour, in particular the elasticity. For each type of silicone and for each rate tested, stress-strain curves can be approximated with straight lines with different slopes, as reported in Fig. 3, and the R-squared index has high values (Table II). Fig. 3 shows stress-strain curves at different compression rates (5 and 30mm/min).
B. Dependence on the rate of load application: hysteresis As already said, hysteresis is an expected behaviour for
viscoelastic materials; for this reason, for each stress-strain curve, the difference between stresses at the same strain, in loading and unloading phases, has been calculated obtaining the residual curve.
By means of this result, the maximum difference between compression and release curves can be estimated. Table III
TABLE II R-SQUARED INDEX AND RELATIVE SLOPES
Compression Rate
Silicone R2 slope [Pa]
5 mm/min DS 0.953 40 924 GLS40 0.971 32 924
GLS50 0.949 55 956 30 mm/min DS 0.948 41 711
GLS40 0.96 30 769 GLS50 0.935 51 991
TABLE II RESIDUAL CURVE ANALYSIS
GLS50 Velocity [mm/min] 5.00 10.00 20.00 30.00 Mean value SD % Max difference 3.30 2.15 2.02 2.85 2.58 0.60DS Velocity [mm/min] 5.00 10.00 20.00 30.00 Mean value SD % Max difference 4.03 3.17 3.53 3.90 3.66 0.39GLS40 Velocity [mm/min] 5.00 10.00 20.00 30.00 Mean value SD % Max difference 3.71 2.78 3.37 3.51 3.34 0.40
% max difference for 5-10-20-30 mm/min rates, relative mean value and Standard Deviation (SD) for each type of silicone
shows percentage indexes at different rates; mean values are lower than 4% and the SD values differ from the mean value by an order of magnitude for each silicone type.
From this analysis we can conclude that the hysteretic effect is negligible and from now on it is possible to consider a single curve (compression phase) as representative the stress-strain trend. From all the previous considerations, taking into account the final features needed for manufacturing the devices, GLS40 silicone can be excluded due to its lower stiffness although it has the higher linearity; moreover, considering the hysteretic effect, GLS50 has a lower mean value as rate changes and it is also more rigid for all the rates investigated. For these reasons GLS50 has been chosen as material for the cow’s body and ring toy.
C. Calibration procedure In order to complete the characterization of the system an
electrical calibration has been carried out for the devices and starting from the calibration curves the relative linear interpolation have been extracted. The following equations are the calibration curves of the cow’s body and ring toys:
xVoltPay ]/[1067.1 4 cow toy xVoltPay ]/[1043.1 4 ring toy
Each FSR force sensor was calibrated individually after being embedded into the device in its final position (cow’s arms or flower petals). Six calibration levels (50, 100, 150, 200, 250, and 300 gr) were presented in growing order to the sensors twice. From the Condition Circuitry two different output voltages were monitored: Vsens (that can be set by using the adjustable voltage divider) and Vout (the final voltage read from the NI-DAQ). Averages of the outputs voltages (Vsens and Vout) of the different sensors corresponding to different weights were used as static calibration points.
These items were then correlated and interpolated to zero (Fig. 4).
Fig. 3: stress-strain curve of the three silicones at 5mm/min (a) and 30mm/min (b) and relative linear interpolation
250
D. Clinical tests In order to check the whole functionality of the
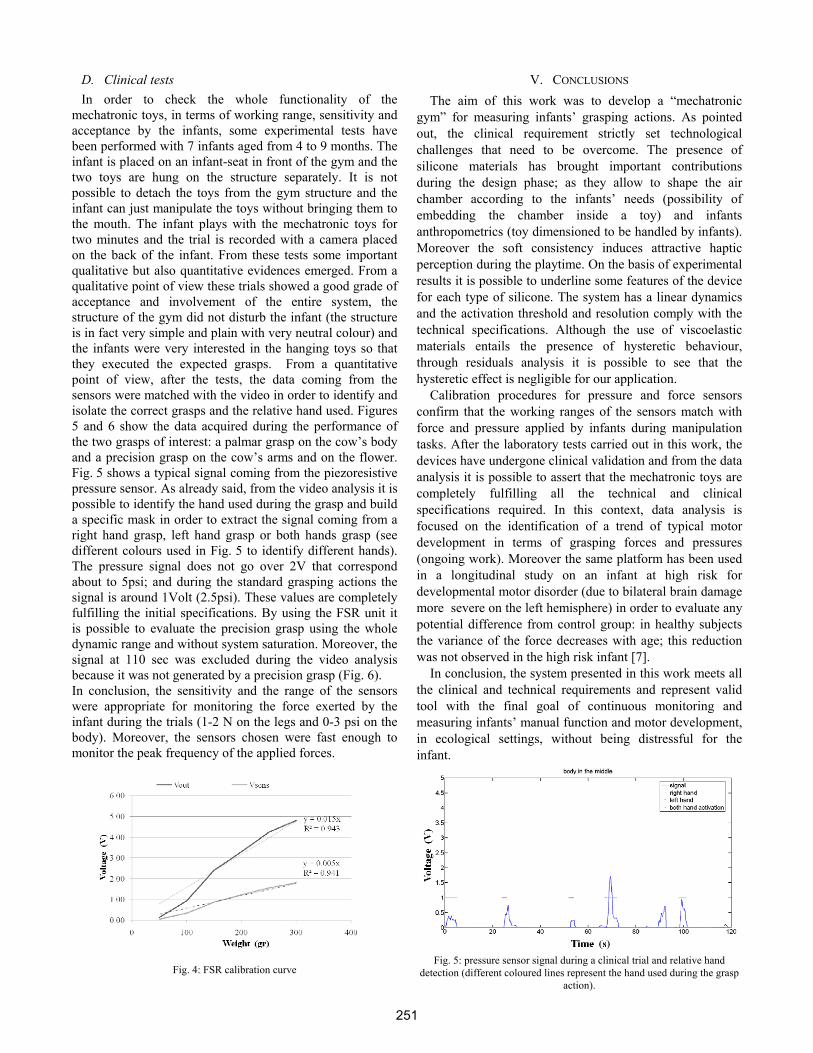
mechatronic toys, in terms of working range, sensitivity and acceptance by the infants, some experimental tests have been performed with 7 infants aged from 4 to 9 months. The infant is placed on an infant-seat in front of the gym and the two toys are hung on the structure separately. It is not possible to detach the toys from the gym structure and the infant can just manipulate the toys without bringing them to the mouth. The infant plays with the mechatronic toys for two minutes and the trial is recorded with a camera placed on the back of the infant. From these tests some important qualitative but also quantitative evidences emerged. From a qualitative point of view these trials showed a good grade of acceptance and involvement of the entire system, the structure of the gym did not disturb the infant (the structure is in fact very simple and plain with very neutral colour) and the infants were very interested in the hanging toys so that they executed the expected grasps. From a quantitative point of view, after the tests, the data coming from the sensors were matched with the video in order to identify and isolate the correct grasps and the relative hand used. Figures 5 and 6 show the data acquired during the performance of the two grasps of interest: a palmar grasp on the cow’s body and a precision grasp on the cow’s arms and on the flower. Fig. 5 shows a typical signal coming from the piezoresistive pressure sensor. As already said, from the video analysis it is possible to identify the hand used during the grasp and build a specific mask in order to extract the signal coming from a right hand grasp, left hand grasp or both hands grasp (see different colours used in Fig. 5 to identify different hands). The pressure signal does not go over 2V that correspond about to 5psi; and during the standard grasping actions the signal is around 1Volt (2.5psi). These values are completely fulfilling the initial specifications. By using the FSR unit it is possible to evaluate the precision grasp using the whole dynamic range and without system saturation. Moreover, the signal at 110 sec was excluded during the video analysis because it was not generated by a precision grasp (Fig. 6). In conclusion, the sensitivity and the range of the sensors were appropriate for monitoring the force exerted by the infant during the trials (1-2 N on the legs and 0-3 psi on the body). Moreover, the sensors chosen were fast enough to monitor the peak frequency of the applied forces.
Fig. 4: FSR calibration curve
V. CONCLUSIONS The aim of this work was to develop a “mechatronic
gym” for measuring infants’ grasping actions. As pointed out, the clinical requirement strictly set technological challenges that need to be overcome. The presence of silicone materials has brought important contributions during the design phase; as they allow to shape the air chamber according to the infants’ needs (possibility of embedding the chamber inside a toy) and infants anthropometrics (toy dimensioned to be handled by infants). Moreover the soft consistency induces attractive haptic perception during the playtime. On the basis of experimental results it is possible to underline some features of the device for each type of silicone. The system has a linear dynamics and the activation threshold and resolution comply with the technical specifications. Although the use of viscoelastic materials entails the presence of hysteretic behaviour, through residuals analysis it is possible to see that the hysteretic effect is negligible for our application.
Calibration procedures for pressure and force sensors confirm that the working ranges of the sensors match with force and pressure applied by infants during manipulation tasks. After the laboratory tests carried out in this work, the devices have undergone clinical validation and from the data analysis it is possible to assert that the mechatronic toys are completely fulfilling all the technical and clinical specifications required. In this context, data analysis is focused on the identification of a trend of typical motor development in terms of grasping forces and pressures (ongoing work). Moreover the same platform has been used in a longitudinal study on an infant at high risk for developmental motor disorder (due to bilateral brain damage more severe on the left hemisphere) in order to evaluate any potential difference from control group: in healthy subjects the variance of the force decreases with age; this reduction was not observed in the high risk infant [7].
In conclusion, the system presented in this work meets all the clinical and technical requirements and represent valid tool with the final goal of continuous monitoring and measuring infants’ manual function and motor development, in ecological settings, without being distressful for the infant.
Fig. 5: pressure sensor signal during a clinical trial and relative hand
detection (different coloured lines represent the hand used during the grasp action).
251

Fig. 6: force sensor signal during a clinical trial and relative hand
detection (different coloured lines represent the hand used during the grasp action).
Moreover, the methods presented allow to design and
develop new devices with different features (i.e. new shapes with different types of affordance) up to the development of a stand-alone system, embeddable in a variety of different toys for the screening of a large number of infants.
ACKNOWLEDGMENT The authors would to thank Dr. Stefano Roccella for his
precious help and competences in the field of viscoelastic materials and continuum mechanics. Special thanks to Dr. Sgandurra and Prof. Cioni, from the clinical Centre “Stella Maris” in Pisa, for the close collaboration and fundamental contribution in defining the clinical specifications.
REFERENCES [1] G. Cioni, A. F. Bos, C. Einspieler, F. Ferrari, A. Martijn,
P. B. Paolicelli, G. Rapisardi, M. F. Roversi and H. F. R. Prechtl, “Early neurological signs in preterm infants with unilateral intraparenchymal echodensity,” Neuropediatrics, vol. 31, no. 5, pp. 240-251, Oct. 2000.
[2] J. A. Eyre, M. Smith, L. Dabydeen, G. J. Clowry, E. Petacchi, R. Battini, A. Guzzetta and G. Cioni, “Is hemiplegic cerebral palsy equivalent to amblyopia of the corticospinal system?,” Annals of Neurology, vol. 62, no. 5, pp. 493-503, Nov. 2007.
[3] A. Guzzetta, E. Mercuri, G. Rapisardi, F. Ferrari, M. F. Roversi, F. Cowan, M. Rutherford, P. B. Paolicelli, C. Einspieler, A. Boldrini, L. Dubowitz, H. F. Prechtl and G. Cioni, “General neonatal movements detect early signs of hemiplegia in term infants with
cerebral infarction,” Neuropediatrics, vol. 34, no. 2, pp. 61-66, Apr. 2003.
[4] D. Campolo, E. Guglielmelli, F. Keller, C. Laschi and P. Dario, “Towards development of biomechatronic tools for early diagnosis of neurodevelopmental disorders,” Proc. 29th Annu. International Conference of the IEEE in Engineering in Medicine and Biology Society, New York, 2006, 1:3242-5.
[5] B. Noris, K. Benmachiche, J. Meynet, J. P. Thiran and A. Billard, “Analysis of Head Mounted Wireless Camera Videos for Early Diagnosis of Autism,” Computer Recognition Systems, vol. 2, no. 1, pp. 663-670, 2007.
[6] D. Campolo, C. Laschi, F. Keller and E. Guglielmelli, “A Mechatronic Platform for Early Diagnosis of Neurodevelopmental Disorders,” on RSJ Advanced Robotics Journal, vol. 21, no. 10, pp. 1131-1150, 2007.
[7] G. Sgandurra, F. Cecchi, S. M. Serio, M. Del Maestro, A. Guzzetta, E. Sicola, C. Laschi, P. Dario and G. Cioni, “BioMechatronic gym: a new tool in normal and atypical motor development,” Developmental Medicine & Child Neurology, vol. 51, suppl. 3, pp. 24, June 2009.
[8] D. Campolo, S. E. Maini, F. Patanè, C. Laschi, P. Dario, F. Keller and E. Guglielmelli, “Design of a Sensorized Ball for Ecological Behavioral Analysis of Infants,” Proc. Annu. IEEE Intl. Conf. on Robotics and Automation, Rome, 2007, pp. 1529-1534.
[9] M. Molina and F. Jouen, “Modulation of the palmar grasp behavior in neonates according to texture property,” Infant Behavior and Development, vol. 21, no. 4, pp.659-666, 1998.
[10] P. Rochat, “Object manipulation and exploration in 2-to 5-month-old infants,” Developmental Psychology, vol. 25, no. 6, pp. 871-884, 1989.
[11] J. G. Hall, U. G. Froster Iskenius and J. E. Allanson, Handbook of normal physical measurements, Oxford: Medical Pubblications, 1995
[12] D. A. Norman, “Affordances, Conventions and Design,” Interactions, vol.6, no.3, pp. 38-43, May 1999.
[13] M. R. Cutkosky and R. D. Howe, “Human grasp choice and robotic grasp analysis,” Dextrous robot hands, New York, Springer-Verlag, Inc.,1990, pp 5-31.
[14] M. Molina and F. Jouen, “Manual cyclical activity as an exploratory tool in neonates,” Infant Behavior and Development, vol. 27, no. 1, pp. 42-53, Feb. 2004.
[15] A. M. Gordon and S. V. Duff, “Fingertip forces during object manipulation in children with hemiplegic cerebral palsy. I: anticipatory scaling,” Developmental Medicine and Child Neurology, vol.41, no.3, pp. 166–175, Mar. 1999.
[16] D. J. Serrien, P. Kaluzny, U. Wicki and M. Wiesendanger, “Grip force adjustments induced by predictable load perturbations during a manipulative task,” Exp. Brain Res., vol. 124, no.1, pp. 100–106, Jan. 1999.
[17] DIRECTIVE 2009/48/EC OF THE EUROPEAN PARLIAMENT AND OF THE COUNCIL OF 18 JUNE 2009 ON THE SAFETY OF TOYS, OFFICIAL JOURNAL OF THE EUROPEAN COMMUNITIES.OJ L 170, JUN 2009.
[18] http://www.interlinkelectronics.com/force_sensors/technologies/fsr.html
252
Copyright © 2022 FDOKUMEN