Copyright by Eli Willard 2019 - The University of Texas at Austin
204
Copyright by Eli Willard 2019
-
Upload
khangminh22 -
Category
Documents
-
view
3 -
download
0
Transcript of Copyright by Eli Willard 2019 - The University of Texas at Austin

Copyright
by
Eli Willard
2019

The Thesis Committee for Eli Willard certifies that this is theapproved version of the following thesis:
Acoustic Transducer Design for Active Reflection
Cancellation in a Finite Volume Wave Propagation
Laboratory
APPROVED BY
SUPERVISING COMMITTEE:
Michael R. Haberman, Supervisor
Johan O.A. Robertsson

Acoustic Transducer Design for Active Reflection
Cancellation in a Finite Volume Wave Propagation
Laboratory
by
Eli Willard
THESIS
Presented to the Faculty of the Graduate School of
The University of Texas at Austin
in Partial Fulfillment
of the Requirements
for the Degree of
MASTER OF SCIENCE IN ENGINEERING
THE UNIVERSITY OF TEXAS AT AUSTIN
May 2019

For Athena

Acknowledgments
The completion of this project could not have been possible without
the help of many individuals. I would like to extend my utmost thanks to
my advisor, Dr. Michael R. Haberman, for welcoming me into the research
group, and for providing constant support, advice, and guidance throughout
my time in graduate School. I would also like to express my sincere gratitude
to Prof. Dr. Johan O.A. Robertsson and Dr. Dirk-Jan van Manen of ETH
Zurich, who have supported this research and have graciously allowed me to
participate in the WaveLab project.
Additionally, I would like to thank my colleagues, Theodore Becker and
Nele Borsing of ETH Zurich, and Justin Dubin and Benjamin Goldsberry of
the University of Texas at Austin, for providing support in the lab, feedback
on writing and research, and friendship along the way. The mass production
of the transducers described in this report was made possible by the expertise
of the engineering and technical staff at the Applied Research Laboratories,
including Robert Abney and Bryon Kwapil. Lastly, I would like to thank
my girlfriend, Athena, for her dedication and encouragement throughout the
writing of this thesis.
v

Acoustic Transducer Design for Active Reflection
Cancellation in a Finite Volume Wave Propagation
Laboratory
Eli Willard, M.S.E.
The University of Texas at Austin, 2019
Supervisor: Michael R. Haberman
This thesis describes the design, fabrication and experimentally ob-
tained electro-acoustic response of an acoustic transducer suite constructed for
use in the Wave Propagation Laboratory (WaveLab) at ETH Zurich. Wave-
Lab aims to immerse a physical acoustic experiment within a real-time vir-
tual numerical environment by implementing immersive boundary conditions
(IBCs)[1, 2]. When scale-model ultrasonic experimentation is not possible, a
system with IBCs allows for low frequency, reflection-free acoustic measure-
ments in a small physical domain. Additionally, the WaveLab IBCs are imple-
mented to simulate interactions with virtual scatterers and media with arbi-
trary physics of wave propagation. The physical experiment of the WaveLab
facility consists of a water tank measuring only 2 m on a side. The IBCs are
realized through a massive computational engine coupled with a dense array of
sensing and emitting acoustic transducers, which are used to sense and inject
vi

intricate wavefields at hundreds of locations inside the physical experiment.
Criteria for the transducers are discussed in terms of individual and overall
system response. The design parameters and associated models include sen-
sitivity, scattering strength, directivity, frequency response, noise floor, and
the dynamic range of the system. The transducer designs and models are
presented alongside their physical prototypes and experimental results.
vii

Table of Contents
Acknowledgments v
Abstract vi
List of Tables xii
List of Figures xiii
Chapter 1. Introduction 1
1.1 Motivation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 Project Goals . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.3 Project Summary . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.3.1 System Specifications . . . . . . . . . . . . . . . . . . . 4
1.3.2 Hydrophone Design . . . . . . . . . . . . . . . . . . . . 5
1.3.3 Acoustic Source Design . . . . . . . . . . . . . . . . . . 6
1.3.4 Conclusions and Future Work . . . . . . . . . . . . . . . 6
1.4 Modeling Approach . . . . . . . . . . . . . . . . . . . . . . . . 6
1.4.1 Background on Piezoelectricity . . . . . . . . . . . . . . 7
1.4.2 Lumped element models and equivalent circuits . . . . . 10
1.4.3 Finite Element Models . . . . . . . . . . . . . . . . . . . 14
1.5 Measurement Approach . . . . . . . . . . . . . . . . . . . . . . 15
1.5.1 Electrical Input Impedance . . . . . . . . . . . . . . . . 15
1.5.2 Transmit Voltage Response . . . . . . . . . . . . . . . . 15
1.5.3 Receive Voltage Sensitivity . . . . . . . . . . . . . . . . 17
1.5.4 Scanning Laser Doppler Vibrometry . . . . . . . . . . . 18
Chapter 2. System Design Criteria 19
2.1 WaveLab System Operation . . . . . . . . . . . . . . . . . . . 19
2.2 Source Budget . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
2.3 Transducer Design Requirements . . . . . . . . . . . . . . . . . 26
viii

Chapter 3. Hydrophone Design 29
3.1 Hydrophone Design Theory . . . . . . . . . . . . . . . . . . . . 29
3.1.1 Sensitivity . . . . . . . . . . . . . . . . . . . . . . . . . 29
3.1.2 Directivity . . . . . . . . . . . . . . . . . . . . . . . . . 30
3.1.3 Bandwidth . . . . . . . . . . . . . . . . . . . . . . . . . 31
3.1.4 Self-Noise . . . . . . . . . . . . . . . . . . . . . . . . . . 32
3.1.5 Diffraction and Scattering . . . . . . . . . . . . . . . . . 34
3.1.6 Mechanical Design . . . . . . . . . . . . . . . . . . . . . 35
3.2 Sensing Element Design . . . . . . . . . . . . . . . . . . . . . . 37
3.3 Hydrophone Equivalent Circuit . . . . . . . . . . . . . . . . . 39
3.3.1 Radial Mode Circuit Parameters . . . . . . . . . . . . . 42
3.3.2 Axial Mode . . . . . . . . . . . . . . . . . . . . . . . . . 48
3.3.3 Blocking Force and Output Voltage . . . . . . . . . . . 53
3.3.4 Radiation Impedance . . . . . . . . . . . . . . . . . . . 55
3.3.5 Effects of End-Caps . . . . . . . . . . . . . . . . . . . . 56
3.3.6 Cable Effects . . . . . . . . . . . . . . . . . . . . . . . . 57
3.3.7 Stacked Sensing Elements . . . . . . . . . . . . . . . . . 58
3.3.8 Summary of Hydrophone Equivalent Circuit . . . . . . . 59
3.4 Prototype Specifications . . . . . . . . . . . . . . . . . . . . . 59
3.5 COMSOL Finite Element Model . . . . . . . . . . . . . . . . . 61
3.5.1 Model Definition . . . . . . . . . . . . . . . . . . . . . . 61
3.5.2 Physics Implementation . . . . . . . . . . . . . . . . . . 63
3.5.3 Meshing Considerations . . . . . . . . . . . . . . . . . . 64
3.5.4 Input Impedance . . . . . . . . . . . . . . . . . . . . . . 65
3.5.5 Scattering Characteristics . . . . . . . . . . . . . . . . . 69
3.5.6 Directivity . . . . . . . . . . . . . . . . . . . . . . . . . 73
3.5.7 Receive Sensitivity . . . . . . . . . . . . . . . . . . . . . 75
3.6 Prototype Characteristics . . . . . . . . . . . . . . . . . . . . . 77
3.6.1 Input Electrical Impedance . . . . . . . . . . . . . . . . 77
3.6.2 Receive Sensitivity . . . . . . . . . . . . . . . . . . . . . 81
3.6.3 Self-Noise . . . . . . . . . . . . . . . . . . . . . . . . . . 82
3.6.4 Dynamic Range . . . . . . . . . . . . . . . . . . . . . . 84
3.7 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
ix

Chapter 4. Source Design 87
4.1 Source Design Theory . . . . . . . . . . . . . . . . . . . . . . . 87
4.1.1 Source Level . . . . . . . . . . . . . . . . . . . . . . . . 87
4.1.2 Directivity . . . . . . . . . . . . . . . . . . . . . . . . . 88
4.1.3 Bandwidth . . . . . . . . . . . . . . . . . . . . . . . . . 91
4.1.4 Size . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
4.1.5 Impulse Response . . . . . . . . . . . . . . . . . . . . . 92
4.1.6 Mechanical Design . . . . . . . . . . . . . . . . . . . . . 95
4.2 Review of Low-Frequency Sources . . . . . . . . . . . . . . . . 97
4.2.1 Tonpilz Transducers . . . . . . . . . . . . . . . . . . . . 97
4.2.2 Flexural Transducers . . . . . . . . . . . . . . . . . . . . 99
4.2.3 Bender Mode X-Spring . . . . . . . . . . . . . . . . . . 100
4.3 Equivalent Circuit . . . . . . . . . . . . . . . . . . . . . . . . . 103
4.4 X-Spring Design . . . . . . . . . . . . . . . . . . . . . . . . . . 106
4.4.1 Introduction to Direct Stiffness Method . . . . . . . . . 106
4.4.2 Defining Nodes, Elements, and Boundary Conditions . . 109
4.4.3 Basic Element Stiffness . . . . . . . . . . . . . . . . . . 110
4.4.4 Local to Global Transformation . . . . . . . . . . . . . . 111
4.4.5 Applied Load and Nodal Displacement Vectors . . . . . 113
4.4.6 Displacement and Eigenvalue Solutions . . . . . . . . . 114
4.5 COMSOL Finite Element Model . . . . . . . . . . . . . . . . . 116
4.5.1 Model Definition . . . . . . . . . . . . . . . . . . . . . . 116
4.5.2 Physics Implementation . . . . . . . . . . . . . . . . . . 117
4.6 Prototype Specifications . . . . . . . . . . . . . . . . . . . . . 120
4.7 Prototype Characterization . . . . . . . . . . . . . . . . . . . . 123
4.7.1 Eigenmodes of the X-Spring . . . . . . . . . . . . . . . . 123
4.7.2 Electrical Input Impedance . . . . . . . . . . . . . . . . 127
4.7.3 Piston Velocity . . . . . . . . . . . . . . . . . . . . . . . 128
4.7.4 Transmit Voltage Response . . . . . . . . . . . . . . . . 132
4.7.5 Directivity . . . . . . . . . . . . . . . . . . . . . . . . . 133
4.8 Source Budget . . . . . . . . . . . . . . . . . . . . . . . . . . . 135
4.9 Deviations from rigid boundaries on the emitting surface . . . 137
4.10 Whitening of the source transfer function . . . . . . . . . . . . 140
4.11 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 143
x

Chapter 5. Conclusion and Future Work 145
Appendices 149
Appendix A. Hydrophone Fabrication 150
Appendix B. BMX Source Fabrication 157
Appendix C. APC Piezoceramic Material Properties 164
Appendix D. MATLAB Code for an Equivalent Circuit Modelof a Hydrophone with an End-Capped CylindricalSensing Element 166
Appendix E. MATLAB Code for a Direct Stiffness-Based X-Spring Design Tool 177
Bibliography 185
Vita 188
xi

List of Tables
1.1 Electrical and mechanical impedance analogs. . . . . . . . . . 12
2.1 Qualitative and quantitative transducer design goals. . . . . . 27
3.1 USRD F50 hydrophone performance characteristics. . . . . . . 39
3.2 Summary of hydrophone equivalent circuit parameters. . . . . 59
4.1 Source budget parameters of the WaveLab transducer system. 137
C.1 APC Piezoceramic Material Properties [3]. . . . . . . . . . . . 165
xii

List of Figures
1.1 The WaveLab tank. . . . . . . . . . . . . . . . . . . . . . . . . 2
1.2 Different shapes and sizes of piezoelectric ceramics. From PhysikInstrumente (PI) GmbH & Co. KG. . . . . . . . . . . . . . . . 7
1.3 Example of an RLC resonator circuit. . . . . . . . . . . . . . . 10
1.4 Equivalent circuit for a general piezoelectric element. . . . . . 13
2.1 Illustration of the physical domain immersed in the numericaldomain, allowing for interactions with virtual scatterers witharbitrary physics of wave propagation. . . . . . . . . . . . . . 20
2.2 Illustration of the emitting surface and the recording surfaceinside the physical domain. . . . . . . . . . . . . . . . . . . . . 21
2.3 Functional flow diagram of WaveLab system operation. . . . . 23
2.4 Functional flow diagram of the recording surface. . . . . . . . 23
2.5 Functional flow diagram of the emitting surface. . . . . . . . . 24
3.1 Receive voltage sensitivity of the Bruel & Kjær 8105 sphericalhydrophone. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
3.2 Directivity patterns of a type F50 hydrophone in the verticalplane. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
3.3 A spherical hydrophone (Bruel & Kjaer model 8105). . . . . . 36
3.4 Cutaway of the USRD F50 Hydrophone. . . . . . . . . . . . . 38
3.5 A simple hydrophone equivalent circuit. . . . . . . . . . . . . . 39
3.6 Comprehensive equivalent circuit for a cylindrical sensitive ele-ment. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
3.7 Geometry and coordinate system of the radial-mode piezoelec-tric cylinder. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
3.8 Circumferential expansion of the cylinder. . . . . . . . . . . . 44
3.9 Geometry and coordinate system of the axial-mode piezoelectriccylinder. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
3.10 Axial expansion of the cylinder. . . . . . . . . . . . . . . . . . 50
xiii

3.11 Real and imaginary parts of the radiation impedance of anequivalent sphere. . . . . . . . . . . . . . . . . . . . . . . . . . 56
3.12 Different configurations of stacked cylinders with end caps. . . 58
3.13 COMSOL hydrophone geometry in axisymmetric plane. . . . . 62
3.14 Meshed geometry of the hydrophone in a water domain. . . . . 65
3.15 Modeled electrical input impedance of cylinder element. . . . . 67
3.16 FEM mode shapes of a piezoelectric tube. . . . . . . . . . . . 68
3.17 Electrical input impedance of cylinder element with end-caps. 69
3.18 Model geometry of hydrophone with overmold. . . . . . . . . . 70
3.19 Hydrophone mounting configurations. . . . . . . . . . . . . . . 71
3.20 FEM horizontal scattered field of the hydrophone. . . . . . . . 72
3.21 FEM vertical scattered field of the hydrophone. . . . . . . . . 73
3.22 FEM hydrophone horizontal directivity. . . . . . . . . . . . . . 73
3.23 FEM hydrophone vertical directivity. . . . . . . . . . . . . . . 74
3.24 FEM model of effect of mounting stem on hydrophone directivity. 75
3.25 Modeled hydrophone RVS. . . . . . . . . . . . . . . . . . . . . 76
3.26 As-built hydrophone prototype. . . . . . . . . . . . . . . . . . 77
3.27 Electrical input impedance of cylinder element with end-caps. 78
3.28 Measured electrical input impedance of cylinder element withend-caps. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
3.29 Measured electrical input impedance of potted hydrophone. . . 80
3.30 Measured hydrophone RVS. . . . . . . . . . . . . . . . . . . . 82
3.31 Hydrophone self-noise spectral density. . . . . . . . . . . . . . 83
4.1 Directivity of a circular piston for ka�1. . . . . . . . . . . . . 90
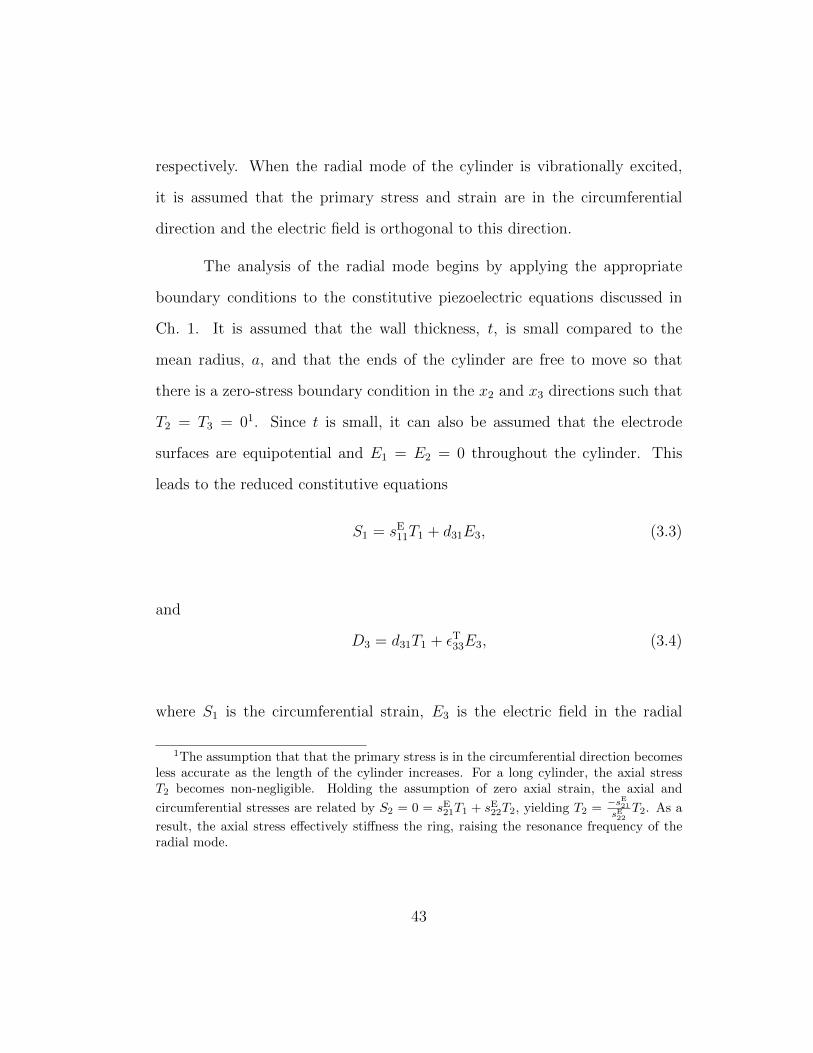
4.2 Example of an underdamped oscillator. . . . . . . . . . . . . . 94
4.3 Example of a critically damped oscillator. . . . . . . . . . . . 94
4.4 Example of an overdamped oscillator. . . . . . . . . . . . . . . 95
4.5 Prototype Tonpilz transducer. . . . . . . . . . . . . . . . . . . 97
4.6 Illustration of the bender-mode drive stack. . . . . . . . . . . 100
4.7 Bender mode X-spring (BMX) source showing the bending ac-tion and piston motion in the z direction. . . . . . . . . . . . . 102
4.8 BMX equivalent circuit. . . . . . . . . . . . . . . . . . . . . . 103
xiv

4.9 Illustration of the interaction between the bender bar and theX-spring. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
4.10 Parametric X-spring geometry. . . . . . . . . . . . . . . . . . . 107
4.11 Frame element with combined rotational and axial displacements.108
4.12 Frame analysis of X-spring showing reduced degrees of freedom. 109
4.13 BMX drive stack geometry. . . . . . . . . . . . . . . . . . . . 118
4.14 BMX assembly geometry. . . . . . . . . . . . . . . . . . . . . . 119
4.15 Bender-mode drive stack prototype. . . . . . . . . . . . . . . . 122
4.16 BMX source prototype. . . . . . . . . . . . . . . . . . . . . . . 122
4.17 BMX prototype in housing. . . . . . . . . . . . . . . . . . . . 123
4.18 First mode shape of the X-spring as computed by the directstiffness method, falling at 3.1 kHz. . . . . . . . . . . . . . . . 125
4.19 FEM mode shape of the X-spring frame element. . . . . . . . 126
4.20 FEM mode shape of the X-spring. . . . . . . . . . . . . . . . . 126
4.21 Impedance of bender-mode drive stack. . . . . . . . . . . . . . 128
4.22 Drive stack FEM mode shape. . . . . . . . . . . . . . . . . . . 129
4.23 In-air piston velocity of bare BMX assembly. . . . . . . . . . . 130
4.24 Effect of housing on measured BMX piston velocity. . . . . . . 131
4.25 TVR of BMX source. . . . . . . . . . . . . . . . . . . . . . . . 133
4.26 Measured BMX beam pattern at 9 kHz. . . . . . . . . . . . . 134
4.27 Theoretical directivity of the baffled BMX source at 9 kHz. . . 135
4.28 Rear side of the representative emitting surface. . . . . . . . . 138
4.29 LDV scan points and dimensions of the representative emittingsurface. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 139
4.30 Measured velocity magnitude of the representative emitting sur-face at the resonance frequency of the source. . . . . . . . . . 140
4.31 Demonstration of the matched filter used to remove the sourcetransfer function from a 3 kHz Ricker wavelet. . . . . . . . . . 142
5.1 Front side of a panel of the in-situ emitting surface. . . . . . . 146
5.2 Back side of a panel of the in-situ emitting surface. . . . . . . 146
A.1 Several cut-to-length hydrophone cables with etching compoundapplied to the tips. . . . . . . . . . . . . . . . . . . . . . . . . 151
A.2 Attaching cable leads to the piezoelectric cylinder. . . . . . . . 152
xv

A.3 Gluing end-caps to the cylinder. . . . . . . . . . . . . . . . . . 153
A.4 Partial Stycast overmold on the piezoelectric cylinder. . . . . . 154
A.5 Full Stycast overmold on the piezoelectric cylinder. . . . . . . 155
A.6 Completed hydrophone with removed flashing. . . . . . . . . . 156
B.1 The X-spring and Piston fastened together with machine screws. 158
B.2 Assembled bender drive stacks, each consisting of a copper elec-trode plate sandwiched between two piezoelectric plates. . . . 159
B.3 Drive stacks fitted into X-springs, with a small amount of epoxyaround the edges to keep the drive stack in place. . . . . . . . 160
B.4 Preparing the BMX transducer to be sealed inside the PVChousing. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 161
B.5 An O-ring is used to offset the piston from the PVC housing. . 162
B.6 The potted BMX transducer. . . . . . . . . . . . . . . . . . . 163
xvi

Chapter 1
Introduction
1.1 Motivation
The ETH-Zurich WaveLab is a proposed acoustic and seismic wave
experimentation laboratory that aims to fully immerse a physical wave prop-
agation experiment in a virtual numerical environment [1, 2]. The system
allows for wave experiments ranging from 1-10 kHz within a finite volume of
only 8 m3, and is capable of simulating interactions with scatterers in a larger
virtual domain with completely arbitrary physics of wave propagation. The
physical experiment is linked to the real-time numerical domain using exact
or immersive boundary conditions.
Immersive boundary conditions (IBCs) are a set of radiation boundary
conditions that enable nonreflecting boundaries in numerical wave propaga-
tion experiments [2]. These boundary conditions are enforced by injecting a
secondary wavefield on the boundary to destructively interfere with the pri-
mary outgoing wave. Therefore, a system with IBCs allows for reflection-free
acoustic measurements of complex materials in a small physical domain. Wave-
Lab’s IBCs are realized through a massive computational engine coupled to
a dense array of approximately 1,000 sensing and emitting acoustic transduc-
1

ers. The transducers are used to simultaneously sense outgoing and scattered
acoustic waves, and are able to create a reflection-cancelling surface and in-
ject interactions with virtual scatterers. This thesis will outline the design
process for a suite of sensing and emitting acoustic transducers, which are of-
fered for consideration in use of the WaveLab system. The design parameters
and associated models presented in this thesis include sensitivity, scattering
strength, directivity, frequency response, noise floor, and the dynamic range
of the system. The transducer designs and models are presented alongside
their physical prototypes and experimental measurements of the performance
of those prototypes.
2 m2 m
2 m
Figure 1.1: The WaveLab tank. Each side of the tank is 2 m long.
2

1.2 Project Goals
The purpose of this thesis is to present a mature and wholly developed
hydrophone and acoustic source design for use in the WaveLab system. The
transducer designs will enable one to replicate the models, physical prototypes,
and measurements presented herein. The transducer design process is outlined
by the following objectives:
1. Identify transducer performance goals and metrics in relation to require-
ments from the WaveLab system. In some cases, these requirements have
informed design constraints and objects due to lessons learned from the
system design and measurements of the prototype performance.
2. Compare literature, patents, and existing transducer prototypes against
the system criteria. These previous works will lay a rough foundation for
the transducer design. A design candidate shall be chosen for detailed
study.
3. Validate and refine the design candidate with equivalent circuit and finite
element models. These models provide a high-level insight to the detailed
workings of the transducers, and allow for tuning, shaping, and adapting
of the design until the system requirements are satisfied.
4. Construct physical prototypes with specifications and tolerances that
match the design as closely as possible. Prototypes should minimize
cost and should conform to best manufacturing practices.
3

5. Experimentally measure prototypes and benchmark against their respec-
tive models to assess performance.
In many instances, it will be necessary to reiterate through the entire
design process due to unforeseen interactions or mechanisms that are manifest
in the as-built prototypes. This process can complete many cycles until a
satisfactory prototype has been developed.
1.3 Project Summary
The WaveLab transducer design, prototype fabrication, and prelimi-
nary experimental demonstration is described in four chapters. A brief outline
of each chapter is as follows.
1.3.1 System Specifications
The transducer design process begins with the identification of the re-
quirements of the WaveLab system. Chapter 2 begins by providing a concep-
tual explanation of the system and details the envisioned use of the transducers
in the system. A functional flow diagram is presented to show how the system
components interact with each other and influence the overall transducer de-
sign. Quantitative design criteria are established using this information. The
criteria include the desired frequency response, the requirements on transducer
size and directionality, and the characteristics of the desired impulse and step
response. A generalized source budget is developed to define qualitative per-
formance targets and to determine the limits of the transducer system.
4

1.3.2 Hydrophone Design
The hydrophone and projector design must be tasked in parallel, since
the performance of one influences the requirements of the other. However, for
the purpose of clarity, the hydrophone and source design are presented sepa-
rately. A discussion of the hydrophone design begins in Ch. 3 with an analysis
of the Underwater Sound Reference Division (USRD) Type F50 Hydrophone,
an underwater sound receiver developed in 1971 for deep-submergence acous-
tic measurements. A design involving hollow cylindrical piezoelectric elements
is selected, and an equivalent circuit model is constructed. The purpose of the
equivalent circuit model is to predict resonances, electrical input impedance,
receive sensitivity, and noise floor across a range of frequencies. A finite ele-
ment model is constructed and compared against the equivalent circuit outputs
and is also used to estimate hydrophone directivity.
Next, finite element models are used to study the acoustic field scattered
when a plane-wave is incident upon the hydrophone in a variety of prospec-
tive mounting configurations. These results are validated with an analytical
solution for the scattered field of a plane-wave incident on an infinite elastic
cylinder. Finally, a comprehensive self-noise model is developed as an input
for the source budget defined in Ch. 2. Prototypes are constructed, and their
performance is measured and compared against models to assess performance
criteria.
5

1.3.3 Acoustic Source Design
The acoustic source design begins in Ch. 4 with an analysis of cantilever
and X-spring driven flextensional sources, and a design candidate is chosen for
use in WaveLab. The design candidate is a bender-bar piezoelectric drive stack
coupled to a magnifying X-spring with a round piston head-mass. A direct
stiffness method is used to design the resonance of the transducer. Next, the
beam patterns of a circular piston are analytically calculated and compared to
a finite element model of the as-built transducer assembly. Measurements of
prototype transducers are then made with Scanning Laser Doppler Vibrometry
(SLDV) and conventional source calibration techniques. These measurements
are compared to models and evaluated with respect to system requirements.
Next, a comprehensive source budget is presented with the complete model
parameters.
1.3.4 Conclusions and Future Work
Chapter 5 summarizes the work presented in Ch. 2-4 in the context
of the WaveLab system, and presents insights for future applications of this
transducer design.
1.4 Modeling Approach
The design approach presented in this thesis relies heavily on analyt-
ical and numerical models, such as equivalent circuits and the finite element
method. These models are then evaluated against the performance of physical
6

Figure 1.2: Different shapes and sizes of piezoelectric ceramics. From PhysikInstrumente (PI) GmbH & Co. KG.
prototypes of the transducers to provide feedback to the transducer models.
The fundamentals of the modeling and measurement approach, will be refer-
enced frequently throughout this thesis, are discussed in this section.
1.4.1 Background on Piezoelectricity
The hydrophones and sources presented in this thesis use piezoelec-
tric ceramic elements as the primary means of electroacoustic transduction.
Piezoelectric ceramics, also known as piezoceramics, are polarized anisotropic
crystalline materials that can be formed and machined into a variety of shapes
and sizes. Transducer characteristics are heavily influenced by the piezoelectric
element geometry, polarization direction, and ceramic composition.
When a mechanical stress or an acoustical pressure is incident upon a
piezoelectric element, an electric field is generated across the electrodes of the
7

element in the direction of polarization. This phenomenon is known as the
direct piezoelectric effect and is exploited by acoustic sensors, which convert
acoustical signals into measurable electric voltages. The piezoelectric effect can
be described by a form of Hooke’s law of elasticity, a set of linear equations
which relate stress, T , strain, S, electric field, E, and electric displacement, D.
If T and S are considered to be symmetric second-rank tensors, the constitutive
piezoelectric equations can be written in strain-charge form as
Si = sEijTj + dt
ni (1.1)
and
Dm = dmjTj + εTmnEn. (1.2)
The material constants in the constitutive equations are:
� sE, a 6× 6 matrix of elastic compliances at constant electric field,
� d, a 6× 3 matrix of piezoelectric strain constants (dt is the transpose of
d),
� and εT, a 3× 3 matrix of permittivity coefficients.
The coefficients of of the constitutive equation can be combined to form a
9 × 9 matrix with 45 unique coefficients. Many of these coefficients can be
eliminated when appropriate boundary conditions are applied. Depending
8

on the application, the constitutive piezoelectric equations can be written in
stress-charge form as:
Ti = cEijSj − et
ni (1.3)
and
Dm = emjSj + εSmnEn (1.4)
where cE is a 6 × 6 matrix of stiffness coefficients and e is a 3 × 6 matrix of
piezoelectric coefficients.
Inversely, an electric potential applied across the electrodes of a piezo-
electric element will create a tensile or compressive strain in the element in the
direction of polarization. For instance, a voltage applied to a piezoelectric bar
which is poled parallel to its length will cause the bar to expand or contract in
its length dimension proportionally to the applied electric field. This is known
as the reciprocal piezoelectric effect and is exploited by acoustic sources to
produce sound.
Piezoelectric reciprocity implies that a single piezoelectric element can
be used for both sensing and transmitting applications. However, in many
cases such as underwater sonar or the WaveLab, this arrangement is not ideal.
Namely, the piezoelectric element used in the hydrophone design is very dif-
ferent than the element used in the source design, as shown in Ch. 3 and 4.
This is because the sources and hydrophones have separate requirements for
9

−+V
R
I
LC
Figure 1.3: Example of an RLC resonator circuit.
resonance, power output, and sensitivity. Further, in the WaveLab system, the
source and sensing surfaces must be physically separate in space. The trans-
ducer characteristics are dependent on element geometry, material properties,
and polarization direction, and can be physically modeled with an analytical
modeling technique known as an equivalent circuit.
1.4.2 Lumped element models and equivalent circuits
The performance of a transducer can be well-approximated by a first-
order equivalent circuit [4], which reduces a complex circuit or network into
multiple physical domains. Equivalent circuits help to inform initial designs
by permitting rapid evaluation of system performance, and provide physical
insight that is difficult to gain using FEM or experimentation. In an equivalent
circuit, each physical domain is represented by a basic RLC electrical resonator
circuit, and the domains are linked together with representative transformers.
RLC circuits comprise idealized electrical components, including resistance, R,
inductance, L, and capacitance, C, which are connected in series or parallel.
An example of a series RLC circuit is shown in figure 1.3.
10

The input impedance of a series RLC circuit is a frequency-dependent
complex quantity defined as the ratio of voltage, V , to current, I, at the circuit
input. The impedance of a series RLC circuit is given as
Zs =V
I= jωL+R +
1
jωC(1.5)
where ω is angular frequency and j is the imaginary number, j =√−1.
Resonance occurs at the frequency where the series impedance of the
circuit is at a minumum [5]. At this frequency, the capacitance and inductance
are equal but 180◦ out of phase. At resonance, the maximum amount of energy
is dissipated through the circuit; therefore, transducers have the highest effi-
ciency when they are operated near resonance. Below the resonant frequency,
the circuit is dominated by its capacitive effects; far above the resonance, the
circuit is dominated by its inductive effects.
In a physical domain, these electrical components are analogous to the
idealized mechanical components of a lumped-element system consisting of
mass, M , mechanical resistance, Rm, and effective compliance, CE, each of
which are driven in parallel by a time-varying force. In this system, force
(or acoustic pressure), F , is analogous to voltage, and particle velocity, u, is
analogous to current. Like the RLC circuit, the mechanical impedance of a
parallel spring-mass-damper system is defined as the ratio of force, or acoustic
pressure, to particle velocity such that
Zm =F
u= jωM +Rm +
1
jωCE. (1.6)
11

Table 1.1: Electrical and mechanical impedance analogs.
Mechanical/Electrical Analog Mechanical Impedance Electrical ImpedanceMass/Inductance 1/jωM jωLCompliance/Capacitance jωCE 1/jωCResistance Rm RForce/Voltage F VVelocity/Current u IDisplacement/Charge
∫udt Q
The resonance of a mechanical system occurs when the impedance is at a
minimum, or when kinetic and potential energies are equal and velocity is at
a maximum. The system is dominated by the effects of kinetic energy below
resonance and the effects of potential energy above resonance. Table 1.1 shows
the map between electrical and mechanical impedance analogs.
A piezoelectric transducer describes both electrical and mechanical do-
mains through the electrical components of the equivalent circuit. In an equiv-
alent circuit, the mechanical components are represented by their electrical
impedance analogs. The electrical domain is governed by the clamped capac-
itance, C0, and the electrical loss conductance, G0. Both of these parameters
are electrical material properties that arise from the piezoceramic’s capacitor-
like behavior [3].
The mechanical and electrical domains are linked to each other through
the electromechanical turns ratio, N . The turns ratio is a means of expressing
the efficiency of the electromechanical transduction process and is represented
12

1 : N
C01/G0−+V
Electrical Domain
CE
M Rm
u
Zr
Mechanical Domain
Figure 1.4: Equivalent circuit for a general piezoelectric element.
as a transformer in the equivalent circuit. To solve an equivalent circuit, the
mechanical domain is transformed into the electrical domain. The outputs
of an equivalent circuit can include input electrical impedance, velocity and
volume acceleration of the piezoelectric element, hydrophone sensitivity, and
source frequency response.
Figure 1.4 is the equivalent circuit for a general piezoelectric element
with a voltage applied across the electrodes, showing both mechanical and
electrical domains. Zr represents the radiation impedance acting on the trans-
ducer, which is discussed with detail in Ch. 3 and 4.
A major assumption of the equivalent circuit is that its components are
much smaller than a wavelength; therefore, equivalent circuits are incapable of
capturing nonlinear and higher-order effects. It is also difficult for equivalent
circuits to model features such as parasitic resonances, mode coupling, finite
size effects, and effects due to potting and housing. For this reason, the finite
element method will be used in conjunction with equivalent circuits to provide
a more detailed analysis of the transducer behavior.
13

1.4.3 Finite Element Models
The Finite Element Method (FEM) is a useful numerical tool that can
be used for transducer characterization. FEM involves discretizing a trans-
ducer into a finite number of elements, applying appropriate boundary condi-
tions, and using variational methods to approximate a solution to the govern-
ing differential equations. FEM models are capable of the same outputs as the
equivalent circuit, but can solve for higher-order effects that the equivalent cir-
cuit cannot. The solution accuracy is dependent on the number of discretized
elements; however, the more elements used, the higher the computational cost.
For acoustic FEM applications, a general practice is that the discrete meshed
elements should be no larger than one sixth of the smallest wavelength in the
study [6].
In this project, the transducers are modeled with COMSOL Multi-
physics v5.3a. COMSOL is an FEM-based simulation software package that is
capable of modeling physics such as piezoelectric effects, solid mechanics, and
pressure acoustics. COMSOL allows for modeling in axisymmetric, 2D or 3D
spacial dimensions. Computational time can be significantly reduced by using
lower dimensions, however, not all physics interfaces are available at lower di-
mensions. The COMSOL models presented in this project take advantage of
lower spacial dimensions where possible.
14

1.5 Measurement Approach
1.5.1 Electrical Input Impedance
The in-air electrical input impedance (magnitude and phase) of a trans-
ducer can be measured to validate equivalent circuit models, finite element
models, and can be used to identify fundamental resonances and parasitic res-
onances due to construction defects. The impedance is measured by directly
connecting the transducer leads to a Keysight E4990A Impedance Analyzer
with all faces and edges of the transducer free from constraints (zero stress
boundary conditions). The impedance measurements in this thesis are made
with sweeps as low as 100 Hz up to 200 kHz to capture the electrical behavior
of the transducer over a wide range of frequencies. As explained, the resonant
frequencies of the transducer can be determined from the impedance minima,
which are accompanied by a 180◦ shift in phase.
An impedance analyzer can also measure the low-frequency capacitance
and dielectric loss of the transducer. These are important parameters that are
material properties of the piezoceramic. These properties directly affect power
output and sensitivity and are used in equivalent circuit models.
1.5.2 Transmit Voltage Response
The transmit response of an acoustic source is a measure of how well
the source can convert an electrical signal into an acoustical pressure. The
transmit response spectrum of an underwater acoustic source is typically pre-
sented as Transmit Voltage Response (TVR). TVR, given by equation 1.7, is
15

defined as the frequency spectrum of pressure generated at a distance of one
meter per applied volt [7]. TVR is reported in dB referenced to 1 µ Pa/V at
1 m.
TV R = 20 log10
(Ms
Mref
)(1.7)
where Ms is the RMS pressure measured by a calibrated hydrophone at a
distance of 1 m divided by the applied voltage, and Mref is the reference
pressure of 1 µ Pa/V at 1 m.
The sources reported in this project were calibrated at the University
of Texas Applied Research Laboratories Lake Travis Test Station. The trans-
ducers are submerged to a depth of 30 feet to the center axis of the projector
face. A Navy H52 hydrophone, fabricated and calibrated by Underwater Sound
Reference Division (USRD) of the Naval Undersea Warfare Center (NUWC),
is used as a reference hydrophone. The reference hydrophone is positioned
a known distance away from the center axis of the projector. The source
is excited with a 20 Vrms, 500-millisecond linear frequency modulated sweep,
spanning 500 Hz to 20 kHz. The output from the reference hydrophone is
recorded. The frequency response of the source is found by cross-correlating
the recording with the input sweep, time windowing the impulse response of
the direct arrival, taking the Fourier transform, and finding the ratio of the
recorded spectra to the input spectra.
16

1.5.3 Receive Voltage Sensitivity
Hydrophone sensitivity indicates how efficiently a hydrophone can con-
vert a measured acoustical signal to a voltage, and is typically presented as
a Receive Voltage Sensitivity (RVS). RVS is an important metric of a hy-
drophone’s fluctuation in sensitivity over a range of frequencies. RVS, given
by equation 1.8 is defined as the ratio of a hydrophone’s output voltage to the
sound pressure level of the wave incident on the hydrophone. RVS values are
typically reported in dB referenced to 1 volt per µ pascal.
RV S = 20 log10
(Mh
Mref
)(1.8)
where Mh is the RMS pressure measured by the unknown hydrophone and
Mref is the RMS pressure measured by a reference hydrophone.
In an RVS calibration, an unknown hydrophone and a calibrated refer-
ence hydrophone are positioned equal distances from a source which is capable
of exciting the entire bandwidth of both hydrophones. The hydrophones in
the project were calibrated in a 12-foot-deep tank at the University of Texas
Applied Research Laboratories. The source is excited with a linear frequency-
modulated sweep ranging from 1-200 kHz. The cross-correlation method is
used to determine the spectral amplitudes for the unknown and reference hy-
drophones.
17

1.5.4 Scanning Laser Doppler Vibrometry
The Scanning Laser Doppler Vibrometer (SLDV) is a powerful tool for
analyzing and visualizing vibrations of transducers. In this project, the SLDV
is used to map the velocity magnitude and phase over the face of a trans-
ducer to assess performance at various stages of construction where underwa-
ter calibrations are not possible. Additionally, the SLDV system allows for
visualization of a transducer’s mode shapes by animating the time-harmonic
displacements of the measured surface at a given frequency. These mode shape
visualizations, as well velocity and phase measurements, can be directly com-
pared to FEM models for validation purposes.
18

Chapter 2
System Design Criteria
2.1 WaveLab System Operation
As briefly outlined in Ch. 1, the WaveLab system aims to fully im-
merse a physical wave experiment within a virtual numerical environment.
The system utilizes immersive boundary conditions (IBCs) to allow waves to
propagate between physical and virtual domains without reflections at the
boundaries [1, 2]. This allows for the physical laboratory to be virtually ex-
panded in size, allowing for frequencies as low as 1 kHz within a water-filled
tank measured 2m × 2m × 2m. Additionally, the virtual domain is capable
of simulating a medium with completely arbitrary physics of wave propaga-
tion. This concept is illustrated in Fig. 2.1, showing the full immersion of
the physical domain inside the virtual domain, and indicating an interaction
between the physical domain and a virtual scatterer. The IBCs are imple-
mented with the help of a custom data acquisition, computation, and control
system that consists of 500 field programmable gate arrays (FPGAs), devel-
oped exclusively for WaveLab by National Instruments. The system unites an
“emitting surface” and a “recording surface” to record, compute, and inject
intricate wavefields at hundreds of locations in real-time.
19

Virtual domain
Physical domain
1, c1
2, c2
3, c3
Figure 2.1: Illustration of the physical domain immersed in the numericaldomain, allowing for interactions with virtual scatterers with arbitrary physicsof wave propagation.
Mathematically, the emitting surface is a distribution of closely-spaced
monopole acoustic sources which line the boundaries of the tank. The emitting
surface cancels reflections from outgoing waves from the boundaries and injects
interactions from the virtual background medium. The sources are mounted
so that the radiating faces are flush with the walls of the tank. Further details
of the source are presented in Ch. 4.
Likewise, theory prescribes that the recording surface is a collection of
hydrophones positioned inside the tank approximately 25 cm away from the
emitting surface. The surface consists of two staggered grids of hydrophone,
used to measure the gradient of the scalar pressure field of incoming waves.
The recorded pressure gradient is used to derive the vector quantity particle
velocity of the incoming wave in real-time. The recorded data is passed to the
data acquisition, computation, and control system where it is extrapolated to
the boundary and through the virtual background medium. An illustration of
20

the recording and emitting surface is shown in Fig. 2.2.
Virtual domain
Physical domain
Srec
Semt
Figure 2.2: Illustration of the emitting surface, Semt, and the recording surface,Srec inside the physical domain.
There are several steps in the WaveLab experiment operation that will
shape the quantitative and qualitative transducer design requirements. Fig. 2.3
provides a functional flow diagram that outlines the WaveLab operation pro-
cedure:
1. A pressure source injects a given wavelet, R (s), into the physical domain
(Si) at an arbitrary location.
2. The direct wave propagates through the physical domain and is reflected
from the physical experiment, Rr (s).
3. The recording surface, Srec, measures the pressure and its gradient, and
the computational engine derives the vector quantity particle velocity.
21

The recording process has three subcomponents, which are shown in
Fig. 2.4:
(i) The incoming signal is detected by the hydrophone and is convolved
with the hydrophone RVS and directivity. Hydrophone thermal
noise and other miscellaneous forms of electrical interference are
unavoidably introduced into to the signal.
(ii) The recorded signal is amplified by a fixed amount with a pream-
plifier. The signal is convolved with the frequency response of the
preamplifier, and preamplifier noise is added to the signal.
(iii) The signal is passed to the data acquisition board (DAQ). The
data is first recorded at a sample rate of 50 MHz with a maximum
resolution of 2 Vpp (1.414 Vrms), and is then downsampled to 20 kHz.
This dictates that the source and hydrophone should be useable at
least to the Nyquist frequency of 10 kHz.
4. The WaveLab system (WL) simulates the wavefield as it approaches the
walls of the tank (i.e., the emitting surface). The system computes the
implicit wavefield separation of incoming and outgoing wavefields, and
extrapolates the outgoing wavefield required to cancel the reflections.
5. The extrapolated wavefield is injected into the physical domain through
the emitting surface, Semt, and reflections from the boundaries are ac-
tively cancelled. The emitting process occurs in two steps, which are
show in figure 2.5:
22

(i) Anti-imaging, or a reconstruction filter, is applied the extrapolated
wavefield signal to avoid stair-stepping and the artificial generation
of higher frequencies. A voltage amplifier applies a fixed amount
of gain to the outgoing signal, and the signal is convolved with the
frequency response of the amplifier.
(ii) The signal is convolved with the source TVR and directivity and is
actuated through a given source in the distribution.
Si
1
Srec
3Rr(s)
2
WL
4
Semt
5
R(s) +
+
Figure 2.3: Functional flow diagram of WaveLab system operation.
Hydrohone
3.1
Preamp.
3.2
DAQ
3.3
∗RVS,D(θ) gain
Figure 2.4: Functional flow diagram of the recording surface.
This entire operation is performed in the span of 200 µs, which places
a critical importance on the design of the impulse response of the source and
23

Vamp
5.1
Source
5.2
gain ∗TVR,D(θ)
Figure 2.5: Functional flow diagram of the emitting surface.
hydrophone to minimize the latency of the system. To accurately reproduce
the physically propagating wave, all hardware signatures (such as impulse
and frequency response) are removed from the measurement and injection
processes. This is achieved by convolving the extrapolated wavefield with the
inverse impulse response of the hardware[2].
Although the source and hydrophone have different individual functions
and requirements, their designs are inter-reliant. A modified source budget can
be used to clearly outline how the source and hydrophone interact with each
other and with the WaveLab system.
2.2 Source Budget
The modified source budget is modeled after the SONAR equation,
which estimates the signal excess (SE) of a SONAR system [8], or the amount
by which the signal-to-noise ratio (SNR) exceeds the detection threshold. In
this case, the source budget applies to a single source and a single hydrophone.
The source budget is used to estimate the total source level needed to yield
a given signal excess as measured by the hydrophone. Source level, SL, is
defined as the on-axis sound pressure level radiated by a projector at a given
24

distance from the receiver. Source level is dependent on the transmit voltage
response (TVR), drive voltage, and distance between the source and receiver
such that,
SL = TVR− 20 log10 (| ~r |) + 20 log10 Vgain,src, (2.1)
where | ~r | is the distance from the source to the receiver. Assuming that the
hydrophone has a known receive voltage sensitivity (RVS) and thermal-noise
floor, NF, the modified source budget is given by
SE = SL + RVS− NF. (2.2)
Hydrophone thermal noise will be discussed at length in Ch. 3. Note that
preamplifier gain is not included in the source budget because it is assumed
that any preamplifier gain will proportionally increase the hydrophone self-
noise level. Moreover, the source budget does not account for noise in the
preamplifier, DAQ, or noise due to electromagnetic interference.
To maximize the signal excess, source level and hydrophone sensitivity
should be maximized, and the hydrophone noise floor should be minimized.
The upper bounds of the source level are confined by the power output ca-
pabilities of the voltage amplifier; however, undesirable harmonic distortion
in the piezoelectric elements may occur well before this limit is reached [3].
Additionally, precautions must be taken to ensure that the source level will
not overdrive the hydrophone preamplifier or data acquisition board and in-
25

troduce distortion in the received signal. The lower bounds of the modified
source are defined by the hydrophone sensitivity, noise floor, and the strength
of the scattered signal.
2.3 Transducer Design Requirements
Several qualitative and quantitative design requirements have been de-
fined from the operational specifics and the source budget. The requirements
for the source and hydrophone are outlined in this section.
The following descriptive requirements are placed on the sources that
comprise the emitting surface. Each source must:
(a) be able to reproduce signals with frequencies under 10 kHz, and ideally
should have a flat frequency response over this band,
(b) maximize power output so sources can cancel the direct wave from the
injection source at arbitrary location within the physical domain,
(c) be small enough so that sources can be spaced a maximum of 7.5 cm
apart.
(d) have an impulse response such that the source attains steady state in
under 150 µs,
(e) have uniform distribution of radiated sound when mounted in the Wave-
Lab emitting surface wall.
26

The hydrophones that make up the recording surface have similar re-
quirements. Specifically, each hydrophone must:
(a) have sufficient dynamic range to enable measurement of reflections that
are several dB down from the direct wave,
(b) minimize self-noise to increase the dynamic range of the system,
(c) minimize physical size and scattered acoustic field, as the theory pre-
scribes an acoustically transparent recording surface,
(d) have a flat receive sensitivity across the experimental frequency band,
(e) have a uniform receive sensitivity (within 3 dB) at all horizontal and
vertical angles of incidence.
Table 2.1: Qualitative and quantitative transducer design goals.
Design Parameter Hydrophone SourceDirectivity Omnidirectional Baffled monopoleFrequency response Flat <10 kHz Smooth <10 kHzSize Minimize <7.5 cm in diameterSensitivity(Transmit/receive)
Maximize Maximize
Self-noise Minimize -Transient behavior Minimize rise and ring-down times
The design requirements are summarized in Table 2.1. At this point,
the design methodology, operational specifics, and transducer requirements
have been established. The next two chapters are devoted to the design of the
27

hydrophone and source transducers for the WaveLab. When both designs are
fully established, an updated source budget will be presented to demonstrate
the system operability.
28

Chapter 3
Hydrophone Design
3.1 Hydrophone Design Theory
Hydrophones are electro-acoustic devices that convert underwater acous-
tic pressure variations to measurable electrical signals proportional to the pres-
sure amplitude. There are several design parameters and characteristics that
affect the efficiency of the electro-acoustic conversion. This chapter will begin
by discussing the general hydrophone design parameters and desirable hy-
drophone characteristics. The fundamental design aspects of a hydrophone
include sensitivity, directivity, bandwidth, noise floor, scattering of the inci-
dent wave one wishes to measure, and mechanical robustness.
3.1.1 Sensitivity
The sensitivity of a hydrophone is a metric of how efficiently the hy-
drophone converts acoustical pressure variations to an electrical signal over a
range of frequencies of interest. Sensitivity is reported in the form of its Re-
ceive Voltage Sensitivity (RVS) in dB referenced to the sensitivity of 1 V/µPa.
This choice of reference results in typical RVS values on the order of -200 dB
re 1 V/µPa. The conversion from an RVS value to voltage output is straight
forward. For example, if a hydrophone has a sensitivity of -200 dB re 1 V/µPa,
29
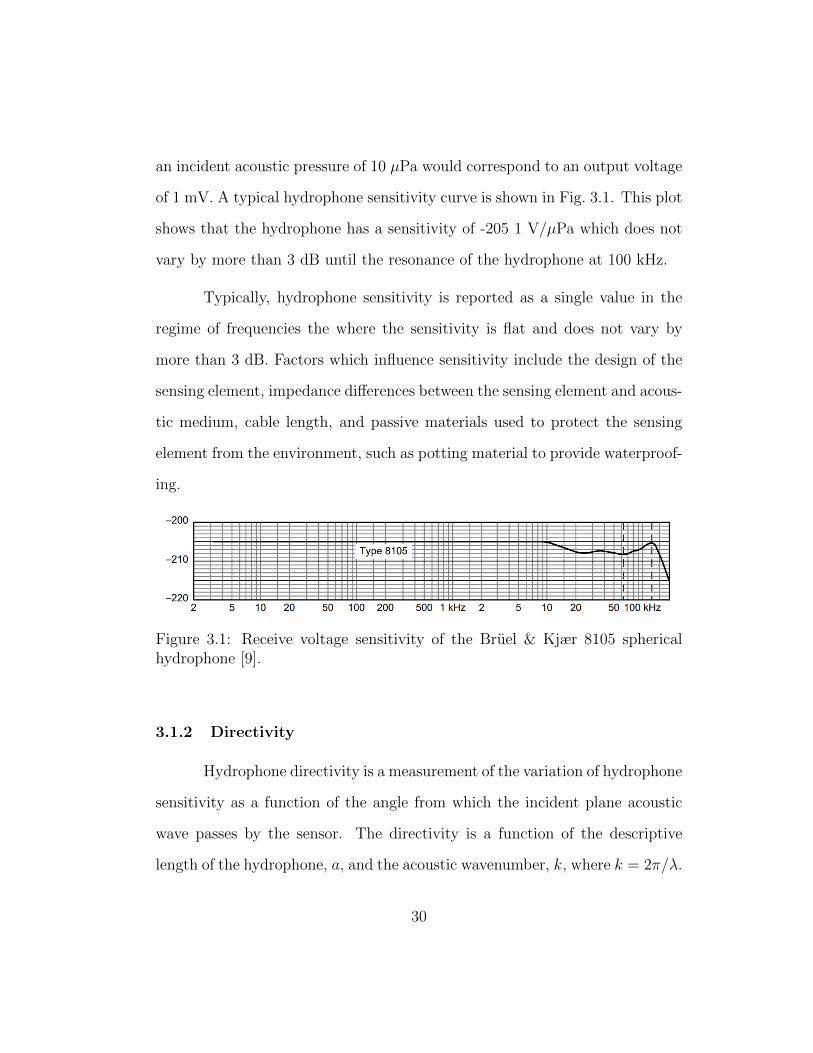
an incident acoustic pressure of 10 µPa would correspond to an output voltage
of 1 mV. A typical hydrophone sensitivity curve is shown in Fig. 3.1. This plot
shows that the hydrophone has a sensitivity of -205 1 V/µPa which does not
vary by more than 3 dB until the resonance of the hydrophone at 100 kHz.
Typically, hydrophone sensitivity is reported as a single value in the
regime of frequencies the where the sensitivity is flat and does not vary by
more than 3 dB. Factors which influence sensitivity include the design of the
sensing element, impedance differences between the sensing element and acous-
tic medium, cable length, and passive materials used to protect the sensing
element from the environment, such as potting material to provide waterproof-
ing.
Figure 3.1: Receive voltage sensitivity of the Bruel & Kjær 8105 sphericalhydrophone [9].
3.1.2 Directivity
Hydrophone directivity is a measurement of the variation of hydrophone
sensitivity as a function of the angle from which the incident plane acoustic
wave passes by the sensor. The directivity is a function of the descriptive
length of the hydrophone, a, and the acoustic wavenumber, k, where k = 2π/λ.
30

The directivity is usually expressed as a function of the non-dimensional prod-
uct ka, which provides a metric of the relative size of the hydrophone to the
wavelength of sound being measured. When a is much smaller than a wave-
length, (i.e., ka�1), the hydrophone is equally sensitive to acoustic pressures
at all angles and is omnidirectional [10]. At higher frequencies, a is compa-
rable to the wavelength of the incident sound and ka ≈ 1. In this frequency
range, nulls in the sensitivity occur at angles where the net pressure variation
across the hydrophone is negligible. In this frequency range, one begins to
observe directions where the hydrophone has maximum sensitivity, known as
the acoustic axis, and secondary maxima (sidelobes) appear in between the
sensitivity nulls. The half-power beamwidth of a hydrophone is defined as
the angle between the half-power points of the main lobe, where sensitivity
decreases by 3 dB when compared to the sensitivity on the acoustic axis. An
example of a hydrophone directivity pattern is given in Fig. 3.2.
3.1.3 Bandwidth
Hydrophone bandwidth is defined as the usable frequency range of the
hydrophone. In this range, the sensitivity is flat and does not fluctuate by more
than 3 dB. In most hydrophones, the maximum frequency of the bandwidth
occurs at the frequency of the fundamental resonance of the hydrophone, which
is marked by a peak in sensitivity followed by a sharp decrease at a rate of
12 dB per octave. For most applications, it is important to design the sensing
element such that the fundamental resonance will not lie within the desired
31

Figure 3.2: Directivity patterns of a type F50 hydrophone in the vertical plane[11].
bandwidth. As an example, Fig. 3.1 shows the RVS of the Bruel & Kjær
8105 hydrophone. The bandwidth of this transducer spans from 0.1 Hz to the
fundamental resonance at 100 kHz, and the RVS is -205 dB re 1 V/µPa.
3.1.4 Self-Noise
Hydrophones have an inherent self-noise due to the electrical dissipa-
tion mechanisms of the sensing element. For the cases considered in this work,
the sensing element is a piezoelectric material so the source of self-noise and
model approximations will be related to hydrophones with piezoelectric sensing
elements.The mechanisms that lead to thermal noise include electrical dissipa-
tion, usually expressed as the dielectric loss factor, as well as mechanical losses
32
associated with the mechanical loss factor and transformed into the electrical
domain via electro-mechanical coupling. These mechanisms cause thermal en-
ergy in the sensing element to generate a small amount of electrical noise.
This electrical noise cannot be removed since it is due to random molecular
motion, and it is thus known as the self-noise floor. It is also notable that the
passive materials used to house the sensing elements also contain dissipative
mechanisms and can thus indirectly lead to increases in the noise floor of the
sensor.
In regards to applications, the noise floor ultimately defines the lower
bound of the dynamic range of the sensor since the noise floor will inhibit
the measurement of signals that have lower amplitudes than the self-noise
floor. Additional sources of noise in the hydrophone signal can arise from
the data acquisition system and preamplifier electronics, mechanical strain in
the hydrophone cable, and electromagnetic and radio-frequency interference.
Those sources of noise can be viewed as independent of the thermal noise floor,
and are thus additive noise that must be considered in the design of the various
electrical components and sensing system associated with the sensing element.
A very useful model of the hydrophone self-noise level is the Johnson-
Nyquist noise formula [4]. Johnson-Nyquist noise is dependent on the resistive
component of the total electrical input impedance of the hydrophone, Rh,
where Rh is a complex function of the sensing element and all of the electro-
mechanical components associated with the hydrophone (i.e. overmold, solder
joints, etc). The value of Rh can be measured or computed from an equivalent
33

circuit. Given the input resistance of the hydrophone from either a model or
measurement, the equivalent mean-squared noise voltage is given as:
〈V 2〉 = 4KTRh∆f, (3.1)
where K is Boltzman’s constant (1.381 × 10−23 J/K), T is the absolute tem-
perature of the water in Kelvin, and ∆f is the bandwidth of the frequency bin
in Hz, which is commonly evaluated in 1 Hz bands [4]. To directly compare
the noise level to an acoustic signal, the mean-squared noise voltage level can
be expressed as an equivalent mean-square noise pressure. The mean-square
noise pressure (or noise spectral density), 〈P 2n〉, is found by dividing the mean-
square noise voltage, 〈V 2〉, by the hydrophone sensitivity, M , in units of V/Pa
such that ⟨P 2n
⟩=⟨V 2⟩/M2. (3.2)
Noise spectral density is useful when comparing the relative levels of incoming
acoustic signals to the noise floor; it is critical that the noise floor of any
hydrophone does not exceed the minimum expected amplitude of the signal
one wishes to measure.
3.1.5 Diffraction and Scattering
When a hydrophone is comparable in size to a wavelength in the acous-
tic medium, it will scatter the impinging sound field. As a result, the pressure
surrounding the hydrophone will differ from the actual pressure at the mea-
surement point in the absence of the hydrophone, which is the quantity one
34

wishes to measure. The inability to measure the field without disturbing the
field is a fundamental limitation of all measurement devices regardless of phys-
ical domain. However, it is important to keep this in mind when designing
hydrophones that are meant to function in an array of sensors since even low
scattered amplitudes can result in a large disruption in the overall field when
large numbers of hydrophones are present. The acoustic field scattered by a
hydrophone is characterized by a directivity similar to the receive sensitivity
directivity pattern discussed in Sec. 3.1.2, where the variation in amplitude of
the fields scattered in the vertical and horizontal planes is presented on a polar
plot for single frequencies. In most cases, the strength of the scattered field
is measured in dB relative to the incident pressure wave. For a given sensing
element (such as a piezoelectric ceramic), the primary contributor to the mag-
nitude of scattered field is the size of the element relative to the wavelength of
acoustic field. This places an importance on the size of the hydrophone and
translates to the requirement that the hydrophone should be small compared
to the shortest acoustic wavelength of interest (i.e. for the highest frequency
signal of interest), such that the scattered field is negligible across the entire
frequency range to be measured.
3.1.6 Mechanical Design
A well-built hydrophone should be mechanically and electrically robust.
Apart from being completely waterproof, the hydrophone should be able to
withstand minor shocks and bumps, should resist corrosion, and should have
35

Figure 3.3: A spherical hydrophone (Bruel & Kjaer model 8105).
low susceptibility to electromagnetic interference. For example, it is important
that the encapsulation material, known as potting, does not greatly affect the
response of the sensing element. For low hydrostatic pressures, a minimal
amount of potting should be used. When considering mass production, it
is also important to be mindful of material cost, machining capabilities, and
ease of fabrication. An example of a hydrophone with a robust mechanical
design is shown in Fig. 3.3, showing a rugged nitrile butadiene rubber overmold
bonded to a spherical piezoelectric sensing element. This hydrophone has
several other mechanical features that have no actual acoustical function, such
as the positioning belt and the long “stem” that is likely used for strain relief.
In practice, any additional mechanical features should be designed to have an
insignificant effect on the acoustic performance of the hydrophone.
36

3.2 Sensing Element Design
A wide variety of consumer and military-grade hydrophones are con-
structed from spherical-shell or cylindrical-tube piezoelectric elements. While
spherical sensing elements generally have exceptional performance character-
istics, they are notoriously expensive due to complex ceramic machining and
molding operations. For cost-minded reasons, the spherical-shell sensing ele-
ment is not investigated in this thesis. Alternatively, hydrophone designs that
incorporate finite-length, hollow cylindrical piezoelectric elements are much
more cost effective. One such hydrophone is the Type F50 hydrophone, de-
signed by the US Navy Underwater Sound Reference Division (USRD).
The USRD Type F50 hydrophone was designed in 1971 [11], and was
subsequently employed as a reference hydrophone by the US Naval Sea Systems
Command. The design was intended to offer broad-band sensing capability,
be physically small, and moderately sensitive for multi-purpose functionality.
The sensing element consists of two radially-polarized, finite-length, thick-
walled piezoelectric cylinders. The end of each cylinder is fitted with an end-
cap to maintain an air-backed boundary on the inner-radius. This physical
boundary is an excellent approximation of a stress-free, or pressure-release,
boundary. Magnesium rims are bonded to the ends of cylinder with epoxy,
and a magnesium insert with O rings is fitted into the cylinder and positioned
so that the O rings seal on the magnesium rims. The O rings mechanically
decouple the insert from the sensing element to avoid any resonances which
could potentially limit the bandwidth. The two sensing elements are held
37

within a cylindrical frame of expanded metal, which serves as an electrostatic
shield and protective guard. A butyl-rubber boot is fitted around the frame to
provide robust waterproofing for harsh environmental conditions. The boot is
filled with castor oil, which serves as an acoustic impedance matching medium
between the element and the rubber boot. A cutaway of the hydrophone is
illustrated in Fig. 3.4
1 2
3
Figure 3.4: Cutaway of the USRD F50 Hydrophone [11]. (1) Butyl boot; (2)cylindrical-tube piezoelectric sensing elements; (3) rigid end-caps.
The bandwidth of the F50 hydrophone is terminated at the fundamen-
tal resonance frequency of the cylindrical sensing element. If the length of
the cylinder is small compared to its circumference, and there are no flexural
resonances in the end-caps, the cylindrical sensing element will resonate in
a breathing radial mode, which is marked by an expansion and contraction
in circumference. If the length of the cylinder is comparable to its circum-
ference, the modal characteristics become more complicated, giving rise to
axial and bending modes. The frequencies at which these modes occur de-
pend on the material properties of the ceramic and the specific length, width,
38

and radial thickness of the sensing elements. It is important to account for
the bandwidth-limiting potential of these modes. A few of the performance
characteristics of the F50 hydrophone are outlined in Table 3.1. Since these
characteristics satisfy the hydrophone design requirements outlined in Ch. 2,
the cylindrical sensing element can be qualified as a candidate for further study
and development.
Table 3.1: USRD F50 hydrophone performance characteristics.
Design Parameter Value
Bandwidth 1 Hz - 70 kHzVoltage sensitivity -206 dB re 1V/µPa at 5 kHzDirectivity Omnidirectional within 1 dB in all planes up to 30 kHz
3.3 Hydrophone Equivalent Circuit
1 : N
C01/G0
+
−
V
CE
M Rm
uZr
Fb
Figure 3.5: A simple hydrophone equivalent circuit.
Equivalent circuit modeling is a well-known and convenient means of
modeling the electro-acoustic behavior of acoustic transducers. Equivalent
39
circuit models provide quick and efficient information about the resonant be-
havior of a system, but are incapable of modeling higher-order effects. An
equivalent circuit can be used to model hydrophone performance character-
istics such as sensitivity, bandwidth, and noise floor. The equivalent circuit
can account for numerous mechanisms such as cable length, sensing element
geometry and material properties, mechanical and electrical losses, and scat-
tering effects. A simple hydrophone equivalent circuit that accounts for one
mechanical resonance is shown in Fig. 3.5. The circuit components are identi-
cal to the example equivalent circuit presented in Ch. 1, but for a hydrophone,
the effort variable, which is represented as a voltage input in previous exam-
ples, is replaced by an open-circuit output voltage. Furthermore, the blocked
force Fb (which represents the incident pressure field) is added as a source
term to the mechanical domain. The current generated by the blocked force is
appropriately translated into the electrical domain via the electro-mechanical
transformer, N , and a voltage is measured at the output terminal.
This section provides the derivation of a comprehensive equivalent cir-
cuit for a hydrophone using a radially-polarized, finite-length, hollow piezo-
electric cylinder. The circuit parameters of the radial and axial modes of
the cylinder element are derived individually and then integrated into a sin-
gle equivalent circuit. First, the circuit parameters are derived for the radial
mode, following the derivation from Sherman and Butler [4] and Joseph [12].
Since no assumption has been made about the circumference of the cylinder
compared to its length, it is necessary to account for axial modes of the cylin-
40

der to ensure that the hydrophone bandwidth is not limited by the axial mode.
The axial-mode equivalent circuit parameters are derived in Sec. 3.3.2, and the
circuit parameters for both the axial and radial modes are combined to form
a comprehensive equivalent circuit. Finally, the equivalent circuit is modified
to account for effects associated with end-caps, overmold, and cable.
I
1/G0 C0
1 : NA
CEA
Mm Rm
uA
Zr
Fb
+
−
V
CER
Mm Rm
uR
Zr
Fb
1 : NR
Figure 3.6: Comprehensive equivalent circuit for a cylindrical sensitive ele-ment.
Figure 3.6 shows the comprehensive hydrophone equivalent circuit, ac-
counting for both radial and axial cylinder modes. As seen in the example
circuit from Ch. 1, the circuit left of the transformers represents the electrical
domain of the hydrophone, while the circuit to the right represents the me-
chanical domain. The mechanical domain is subdivided into two branches: the
radial branch (top) and the axial branch (bottom). It is necessary to split the
41

L
t a
x2
x3
x1
Figure 3.7: Geometry and coordinate system of the radial-mode piezoelectriccylinder.
domain into two branches to account for the orthogonal modes of the piezo-
electric element. In other words, the radial and axial modes of the cylinder are
caused by independent stiffnesses and transformer ratios, and thus require in-
dividual circuits. The unknown circuit parameters that will be derived in this
section include dielectric loss, G0, clamped capacitance, C0, effective short-
circuit compliance, CE, mass, M , radiation impedance, Zr, and blocked force,
Fb. The subscripts R andA are used to indicate the unique circuit parameter
for the radial and axial mode respectively.
3.3.1 Radial Mode Circuit Parameters
Consider the cylindrical tube shown in Fig. 3.7 of length, L, wall thick-
ness, t, and mean radius a = (OD + ID) /2. The cylinder is radially polarized
with electrodes on the inner and outer lateral surfaces. Let the local coor-
dinates x1, x2, and x3 define the circumferential, axial, and radial directions
42
respectively. When the radial mode of the cylinder is vibrationally excited,
it is assumed that the primary stress and strain are in the circumferential
direction and the electric field is orthogonal to this direction.
The analysis of the radial mode begins by applying the appropriate
boundary conditions to the constitutive piezoelectric equations discussed in
Ch. 1. It is assumed that the wall thickness, t, is small compared to the
mean radius, a, and that the ends of the cylinder are free to move so that
there is a zero-stress boundary condition in the x2 and x3 directions such that
T2 = T3 = 01. Since t is small, it can also be assumed that the electrode
surfaces are equipotential and E1 = E2 = 0 throughout the cylinder. This
leads to the reduced constitutive equations
S1 = sE11T1 + d31E3, (3.3)
and
D3 = d31T1 + εT33E3, (3.4)
where S1 is the circumferential strain, E3 is the electric field in the radial
1The assumption that that the primary stress is in the circumferential direction becomesless accurate as the length of the cylinder increases. For a long cylinder, the axial stressT2 becomes non-negligible. Holding the assumption of zero axial strain, the axial and
circumferential stresses are related by S2 = 0 = sE21T1 + sE22T2, yielding T2 =−sE21sE22
T2. As a
result, the axial stress effectively stiffness the ring, raising the resonance frequency of theradial mode.
43

a a+ξ
Figure 3.8: Circumferential expansion of the cylinder.
direction, T1 is the circumferential stress, and D3 is the electric displacement
aligned with the radial direction.
In the radial mode, a time-harmonic voltage, V , applied to the elec-
trodes of the piezoelectric element will cause the circumference of the cylinder
to proportionally expand or contract by an amount ξ, as shown in Fig. 3.8.
The electric field, E3, can be approximated as the ratio of applied voltage to
wall thickness,
E3 =V
t. (3.5)
The circumferential strain is approximated as S1 = ξ/a. Likewise, T1 can be
rewritten in terms of the circumferential force, F , such that
S1 =ξ
a= sE
11
(F
tL
)+ d31
(V
t
). (3.6)
Solving for F yields
F =
(tL
sE11a
)ξ −
(Ld31
sE11
)V, (3.7)
44

where the total radial force within the cylinder is given as
Fr = 2πF. (3.8)
The radial equation of motion is given by Newton’s second law, where
Mξ = F0 − Fr = F0 − 2πF. (3.9)
Here, M is the mass of the cylinder and F0 is any miscellaneous force acting
radially on the cylinder, which can include radiation loading and force due
to an incoming acoustic wave. The mass of the cylinder is given by M =
2πρatL, where ρ is the density of the ceramic. Note that the dot convention
has been used to indicate derivation with respect to time. Substituting the
circumferential force into Eq. (3.7) and rearranging leads to
Mξ = F0 − 2π
[(tL
sE11a
)ξ −
(Ld31
sE11
)V
]. (3.10)
The radial equation of motion can be expressed as an inhomogeneous
second-order differential equation, yielding
Mξ + 2π
(tL
sE11a
)ξ = F0 + 2π
(Ld31
sE11
)V, (3.11)
or, in terms equivalent circuit parameters,
Mξ +
(1
CE
)ξ = F0 +NV, (3.12)
45

where CE is the effective short-circuit radial compliance, and N is the elec-
tromechanical turns ratio. Further, a viscous damping term Rm can be added
to account for mechanical loss. Under time-harmonic conditions, Eq. (3.12)
becomes
jωMξ +1
jωCEξ +Rmξ = F0 +NV. (3.13)
For a simple vibrating piezoelectric cylinder, the only external force is
the radiation impedance. Setting F0 equal to the radiation force on the radial
moving surface, Zr, the solution for radial velocity, ξ, becomes
ξ =NV
jωM + (1/jωCE) +Rm + Zr
, (3.14)
where the mechanical impedance Zm = V/ξ.
The electrical input impedance is obtained by eliminating T1 from
Eqs. (3.3) and (3.4), yielding the dielectric displacement
D3 = d31
(1
sE11
S1 −d31
sE11
E3
)+ εT33E3. (3.15)
The clamped dielectric constant, εS33, is given for constant S1 strain as
εS33 = εT33
(1− k2
31
), (3.16)
where k31 is the piezoelectric coupling factor, given by k31 = d231/s
E11ε
T33.
46

From here, Eq. (3.15) is rewritten as
D3 = (d31/sE11) S1 + εS33 E3. (3.17)
With dielectric displacement D31 given by the charge per unit area, Q,
S1 given by ξ/a, and E3 given by V/t, Eq. (3.17) is rewritten as
Q
2πaL=
(d31
sE11a
)ξ + εS33
V
t. (3.18)
The clamped capacitance is evaluated at constant S1 such that
C0 = ∂Q/∂V = (2πaLεS33)/t. (3.19)
The input current, I, is taken as the derivative of the charge with respect to
time, leading to
I =dQ
dt=
(2πLd31
sE11
)ξ + C0
dV
dt, (3.20)
where the term 2πLd31/sE11 is again equal to N, the electromagnetic turns ratio.
Assuming a time-harmonic voltage, Eq. (3.17) can be rewritten as
I =dQ
dt= Nξ + jωC0V. (3.21)
The final form of the electrical input impedance is found by substitut-
ing radial velocity, ξ, from Eq. (3.14), and adding a term G0 to account for
electrical loss conductance, leading to
47

L
ta
x2
x3
x1
Figure 3.9: Geometry and coordinate system of the axial-mode piezoelectriccylinder.
Z =V
I=
N2
jωM +(
1jωCE
)+Rm + Zr
+ jωC0 +G0
−1
. (3.22)
At this point, the stiffness and transformer parameters of the radial
branch of the equivalent circuit have been determined. The section will pro-
ceed by deriving the same parameters for the axial branch of the circuit. Ra-
diation impedance and blocking force will be addressed when all other circuit
parameters have been accounted for.
3.3.2 Axial Mode
The derivation of the axial circuit parameters is carried out in a similar
fashion to the radial mode. In this axial mode, the primary stress and strain are
in the axial direction of the cylinder, while the electric field is still orthogonal to
48

the cylinder circumference. The coordinate system is redefined to be consistent
with the literature-given piezoceramic material properties, which specify x1 as
the direction of primary stress. Let the local coordinates x1, x2, and x3 define
the axial, circumferential, and radial directions, respectively. The boundary
conditions are enforced by assuming plane-strain conditions, zero stress on the
walls of the cylinder (T2 = 0), and equipotential surfaces (E1 = E2 = 0). The
constitutive piezoelectric equations can be rewritten with T as the independent
variable such that
T1 = CE11S1 + CE
13S3 − e31E3 (3.23)
and
D3 = e31S1 + e33S3 + εS33E3, (3.24)
where Cij is the elastic stiffness coefficient, and ekm and εkm are piezoelectric
constants.
The equivalent stiffness is found with the open circuit conditions
T1 = C11S1 + C13S3. (3.25)
Equation (3.25) can be rewritten as
T1 = S1(C11 + C13ν13), (3.26)
49

where ν13 is Poisson’s ratio, equal to −C13/C33. The axial stiffness coefficient,
Cp,l is given as
Cp,1 =T1
S1
= C11 +C2
13
C33
. (3.27)
L
L+ξ
Figure 3.10: Axial expansion of the cylinder.
The nth axial mode occurs when integer multiples of the wavelength
are equal to twice the cylinder height, or when
λp,1 = 2L/n. (3.28)
At the resonance frequency, fr, the wavelength λp,1 = cp,1/fr where cp,l is the
axial wavespeed in the ceramic. The axial wave speed is given as
cp,1 =
√Cp,1
ρ, (3.29)
where ρ is the density of the ceramic. For the first axial mode (n = 1), the
50

resonant frequency is
fr =1
2L
√Cp,1
ρ. (3.30)
The effective axial stiffness, KE, is given where
ω2r =
KE
M=(πL
)2 Cp,1
ρ. (3.31)
The effective axial compliance, CE, is therefore given as
CE =1
KE=
(L
2π3at
)Cp,1. (3.32)
The electromechanical turns ratio, N , can be determined from the
piezoelectric coupling coefficient, k. The piezoelectric coupling coefficient is a
measurement of the amount of energy that is transduced from one domain to
another, where the coupling factor is generally defined as
k2 =energy transduced
total energy input. (3.33)
The coupling factor can also be expressed in terms of energy density, which
can be readily derived from the piezoelectric constitutive equations. k can
be expressed as the ratio of the mutual elastic and dielectric energy density,
Umut, to the geometric mean of the elastic strain energy density, US, and the
dielectric energy density, UD [13]:
k =Umut√USUD
. (3.34)
51

The energy densities can be calculated from the constitutive piezoelectric equa-
tions as
U =1
2(SiTi +DmEm) . (3.35)
Enforcing the appropriate boundary conditions, the strain energy becomes
U =1
2(S1T1 +D3E3) . (3.36)
Substituting T1 from Eq. (3.23) and writing S3 = ν31S3 yields
U =1
2
[S2
1
(CE
11 + CE13ν31
)+ εS33E
23 + e33ν31S1E3
]. (3.37)
From here, the total energy density can be split apart into individual compo-
nents:
US =1
2
[S2
1
(CE
11 + CE13ν31
)], (3.38)
Umut =1
2
[εS33E
23
], (3.39)
and
UD =1
2[e33ν31S1E3] . (3.40)
The effective axial coupling coefficient, keff,l is found by substituting Eqs. (3.38-
52

3.40) into Eq. (3.34) such that
keff,l = e33ν13
(CE
11 + CE13ν13ε
S33
)− 12 . (3.41)
The transformer turns ratio, N , can readily be calculated from the
effective coupling coefficient, the clamped capacitance, C0 (as determined from
Eq. (3.19)), and the effective mechanical compliance, CE, from Eq. (3.32). This
results in the expression
k2 =N2CE
C0 +N2CE(3.42)
or
N =
√k2C0
CE (1− k2). (3.43)
At this point, the equivalent circuit parameters have been defined for
both radial and axial branches. The mechanical mass, Mm and viscous damp-
ing resistance Rm, are unchanged in the axial branch since they are inherent
material properties of the ceramic. In most cases, it is appropriate to tune the
damping resistance parameter to match the quality factor of the resonances
with observations and measurements. From here, the equivalent circuit is fur-
ther developed with the derivation of blocked force and radiation impedance.
3.3.3 Blocking Force and Output Voltage
When an acoustic pressure Pi is incident upon the hydrophone, the
total force acting on the sensing element becomes
F = Zrξ + Fb, (3.44)
53

where Zr is the radiation impedance and ξ is the particle velocity of the incom-
ing wave. The blocked force, Fb, is the integral of local acoustic pressure over
the face of the hydrophone. The radiation impedance is included in this term
to account for the reaction of the acoustic medium when the surface of the
hydrophone is set into vibration. When the size of the hydrophone approaches
the wavelength scale, the diffraction constant Da should be included in the
blocked force such that
Fb = DaPi. (3.45)
The diffraction constant of a cylinder has been solved for several specific ra-
diation cases [4].
The circuit output voltage, V , forms a voltage divider with the blocked
force, Fb, such that
V = Z0 (Fb/N)[Z0 +
(Zm + Zr/N
2)], (3.46)
where Z0 is the clamped electrical impedance and Zm is the equivalent mechan-
ical impedance from both radial and axial branches. The blocked forces and
radiation impedances are appropriately transformed into the electrical domain
by the transformer at each modal branch.
54

3.3.4 Radiation Impedance
Radiation impedance affects the amount of power that can be transmit-
ted from an acoustic medium into the hydrophone. The radiation impedance
is defined [10] as
Zr =Pav
u0
=
∫∫S
PidS = Rr + jXr, (3.47)
where Pi is the local sound pressure incident on the face of the hydrophone,
and Rr and Xr are the resistive and reactive components of the impedance
respectively. The radiation impedance affects the hydrophone performance by
contributing a resistive loss to the transmitted power, and decreases resonant
frequencies due to the increased mass from the fluid load on the receiving face.
Although there is no closed-form solution for the radiation impedance
of a finite cylinder, the cylinder can be well approximated as a sphere with
equivalent radiating area as =√
bL2
where b is the outer radius of the cylinder
[4]. The radiation impedance becomes
Zr = Rr + jωMr = Aρ0c0
[(kas)
2 + jkas
]/[1 + (kas)
2], (3.48)
where A = 4πa2s , rho0 and c0 are the density and sound speed of the acoustic
medium, and k is the wavenumber, given by ω/c0. The normalized resistive
and reactive components of the radiation impedance are shown in Fig. 3.11.
55

0 2 4 6 8 10ka
s
0
0.2
0.4
0.6
0.8
1
Zr /
A0c 0
Radiation impedance of equivalent sphere
Xr
Rr
Figure 3.11: Real and imaginary parts of the radiation impedance of an equiv-alent sphere.
3.3.5 Effects of End-Caps
The cylinder end-caps are used to seal the inner air cavity and maintain
a pressure relase inside the cylinder element. In doing so, the stress boundary
conditions of the cylinder are altered. Langevin has thoroughly considered
the effect on stress and sensitivity from both exposed-end and capped-end
configurations [14]. The sensitivity of a radially polarized cylinder with inner
radius a and outer radius b is given as
M =
∫ b
a
[g33Tr + g31 (Tθ + Tz)] dr, (3.49)
where g33 and g31 are piezoelectric voltage constants, and Tr, Tθ, and Tz are the
56

polar stresses generated by the incident acoustic wave. For both end-exposed
and end-capped conditions it is assumed that the inside lateral surface of the
cylinder is shielded from radiation, while the outside lateral surface is exposed
to a uniform radiation field Pi. The boundary conditions for the end-exposed
case take the form
Tr =a2b2Pi
b2 − a2
(1
R2− 1
a2
), (3.50)
Tθ =a2b2Pi
b2 − a2
(− 1
R2− 1
a2
), (3.51)
and
TZ = −Pi (3.52)
In the capped-end configuration, the ends of the cylinder are subject
to a radiation field b2Pi/ (b2 − a2). The axial stress, TZ, and the subsequent
sensitivity is increased by a factor of −b2/ (b2 − a2).
3.3.6 Cable Effects
A long cable with a high capacitance will reduce the sensitivity of a
hydrophone. The cable capacitance, Cc, forms a voltage divider with the
hydrophone free capacitance, Cf . The output voltage at the end of the cable
becomes
Vc =V Cf
Cf + Cc
, (3.53)
where V is the voltage output of the hydrophone without the cable. For
57

Figure 3.12: Different configurations of stacked cylinders with end caps.
example, if the cable capacitance were equal to the hydrophone free capaci-
tance, the sensitivity would be reduced by a factor of 2. In situations where
a long cable is required, it is advantageous to design a hydrophone with a
high free-capacitance or to place the preamplifier as close to the sensing ele-
ment as possible. For the purpose of this project, it was not feasible to place
the preamplifier close to the sensing element due to scattering concerns and
limitations of space.
3.3.7 Stacked Sensing Elements
The cylindrical sensing elements can be stacked atop one another and
wired in parallel, as show in 3.12. This stacked configuration will increase the
total hydrophone capacitance, which leads to a lower self-noise floor, and can
help mitigate the parasitic capacitance that occurs when using long cables.
However, if the length of the cylinder stack is greater than the cylinder cir-
cumference, the structure is susceptible to lower-frequency axial and bending
modes that could unexpectedly limit the hydrophone bandwidth.
58

3.3.8 Summary of Hydrophone Equivalent Circuit
The derived parameters for the hydrophone equivalent circuit are listed
in Table 3.2. These parameters can readily be adapted for use with arbitrary
piezoceramic material properties and cylinder dimensions.
Table 3.2: Summary of hydrophone equivalent circuit parameters.
Parameter Value
Electrical resistance, R0 (ωCftanδ)−1
Clamped capacitance, C0 (2πaLεS33)/t
Radial branch transformer turns ratio, NR 2π(
Ld31sE11
)Longitudinal branch transformer turns ratio, NL
√k2C0
CE(1−k2)
Radial stiffness, CER 2π
(tLsE11a
)Longitudinal compliance, CE
L
(L
2π3at
)Cp,1
Effective mass, Mm 2πρatL
Radiation impedance, Zr Aρ0c0
[(kas)
2 + jkas
]/[1 + (kas)
2]Blocking force, Fb DaPi
3.4 Prototype Specifications
Piezoelectric cylinders are available off-the-shelf in several standard
sizes. From a mass-manufacturing standpoint, it is much more viable to use
standard sized elements as opposed to custom sizes. The hydrophone equiva-
lent circuit can be used to characterize the various standard cylinders to select
the most appropriate size for the application. The standard sizes should be
assessed for resonant frequency, noise floor, size, and sensitivity.
After a brief survey of readily available materials in the laboratory, a
59

design was proposed. The hydrophone prototype consisted of:
1. A cylinder made of APC 840 piezoceramic2, with wall thickness of 1 mm,
length of 10 mm, and outer diamter of 10 mm. Favoring a smaller size,
the hydrophone was intended to be fabricated from only one cylinder
element as opposed to numerous stacked elements.
2. End caps machined from 1.5 mm-thick Macor ceramic. Macor was cho-
sen specifically for its machinability and high stiffness to avoid end-cap
flexural resonances from interfering with the band of operation.
3. A low-noise coaxial cable with a Teflon outer jacket.
4. A 3 mm-thick potting layer made of Henkel Loctite Stycast 2651 Epoxy
Encapsulant. On the cable side, the potting layer was designed to taper
to a stem for ease of mounting and positioning. Stycast was chosen over
the traditional urethane potting because of its higher stiffness and lower
damping. It was previously observed that thick layers of urethane can
negatively impact the receive sensitivity, and the impact from Stycast
is reduced due to its high stiffness. Additionally, uncured liquid Stycast
has a much lower viscosity than urethane, making it easier to pour into
a mold and degas without trapping any bubbles in the hydrophone.
2APC 840 is a proprietary ceramic manufactured by APC International. It is approxi-mately equivalent to PZT-4 ceramic.
60

These design parameters will be used as the basis for the equivalent
circuit, finite element models and physical prototypes. Before constructing
the physical prototypes, the design will be verified with equivalent circuit and
finite element models. These models will be used to predict impedance, RVS,
noise floor, and scattering, and will ensure that the proposed design meets the
performance requirements established in Ch. 2.
3.5 COMSOL Finite Element Model
The equivalent circuit is effective for modeling the general hydrophone
behavior, but is incapable of modeling higher order effects. An FEM model
can account for both simple and higher order effects such as flexural reso-
nances of the end caps, mode coupling, or effects due to potting, all of which
can significantly alter the hydrophone performance. The section will begin
by detailing the setup of the FEM model in COMSOL Multiphysics. The
model setup includes geometry definition and material selection, physics im-
plementation, and meshing considerations. The section will conclude with the
model results, including electrical input impedance, scattering characteristics,
directivity, and receive sensitivity. The model results are compared to the
equivalent circuit where applicable.
3.5.1 Model Definition
To reduce computational cost, the hydrophone model is represented in
a 2D-axisymmetric domain. In this axisymmetric domain, the plane geom-
61

Macor caps
PZT-4 cylinder
Poling
direction
V+ V-
Figure 3.13: COMSOL hydrophone geometry in axisymmetric plane.
etry shown in Fig. 3.13 is revolved about the global r = 0 axis. Although
consistency has been verified between 2D-axisymmetric and full 3D models,
the axisymmetric domain is limited in that the system is restricted to two
degrees of freedom. For this reason, an axisymmetric model is incapable of
modeling higher-order modes and construction defects, such as misalignment
between the cylinder and the end caps. These misalignments have previously
been observed to cause phase variations over the surface of the hydrophone
and unexpected modal behavior.
PZT-4 piezoelectric material properties are applied to the cylinder, and
Macor material properties are applied to the end-caps. These material proper-
ties are tabulated in Appendix C. At the second stage of analysis, the overmold
geometry is defined and Stycast material properties are prescribed to the pot-
ting layer. The entire hydrophone is exposed to an unbounded water domain,
62

which is surrounded by a PML to absorb propagating background radiation.
3.5.2 Physics Implementation
The hydrophone physics are implemented with COMSOL’s Pressure
Acoustics, Solid Mechanics and Electrostatics modules. The Pressure Acous-
tics module is used to solve the constitutive Helmholtz wave equation in the
water domain. A far-field pressure calculation is defined on the boundary
between the water domain and the PML; this calculation allows for the com-
putation of amplitude and phase of the acoustic pressure at any point outside
of the computational domain. This tool can be used to plot directivity pat-
terns and scattering strength. A background radiation condition is applied to
the water domain, and is used to simulate a plane-wave that is incident on the
hydrophone. The plane-wave propagation vector is defined by the global +z
or +r coordinate, depending on the desired hydrophone receive configuration.
The hydrophone receive configurations are further detailed in Sec. 3.5.5.
The Solid Mechanics module is applied to the piezoelectric element,
end-caps, and overmold. This module, when applied to the mechanical do-
main of the model, uses linear stress-strain equations along with a small de-
formation assumption. An isotropic loss factor is applied to each mechanical
component to model viscous damping losses in the material. From here, it is
necessary to adjust COMSOL’s default piezolectric poling direction. COM-
SOL’s material library automatically assumes that the ceramic polarization
direction is aligned with the global z axis. To specify a radially poled condi-
63

tion, the material polarization direction must be normal to the r axis. This is
achieved by changing the piezoelectric material model’s coordinate system to
the predefined zx-plane system.
The Electrostatics module is then applied to the piezoelectric cylinder.
A floating potential, V0, is specified on the inside lateral wall of the cylinder,
and a ground is defined on the opposite wall. A surface integral is defined
along the inside lateral wall of cylinder to measure the voltage output from
the piezo element in response to the incident plane-wave pressure field.
The multiphysics coupling modules include the Acoustic-Structure Bound-
ary and Piezoelectric Effect. The Acoustic-Structure Boundary is applied to
the interface of the water domain and hydrophone surface, and links the Pres-
sure Acoustics to the Solid Mechanics. Radiation impedance is accounted for
in the Solid Mechanics interface, where the fluid load effectively acts as a me-
chanical load. The Piezoelectric Effect module couples the Electrostatics and
Structural Mechanics modules by solving the constitutive linear piezoelectric
equations.
3.5.3 Meshing Considerations
To accurately resolve the pressure amplitude and phase in the water
domain, the maximum mesh element size should be no larger than 1/5th of the
smallest wavelength in the study. The water domain is meshed with free tri-
angular elements, and the PML is meshed with swept quadrilateral elements.
A single boundary-layer mesh is created water domain-PML interface to fa-
64

cilitate a smooth transition from triangular to quadrilateral elements. The
hydrophone structure is meshed with triangular elements, with a minimum
resolution of two elements in narrow regions. The meshed geometry is shown
in Fig. 3.14.
Hydrophone
PML
Water
Figure 3.14: Meshed geometry of the hydrophone in a water domain.
3.5.4 Input Impedance
To understand how individual components affect the transducer re-
sponse, the electrical input impedance is modeled at various stages of hy-
drophone assembly. To model impedance, the principal of piezoelectric reci-
procity is used, such that no background pressure field is required. First, the
bare cylindrical element without end-caps is modeled entirely outside of the
water domain. This model is equivalent to measuring the input impedance of
the unconstrained bare element in air. Instead of a floating potential, an elec-
tric potential of V0 = 1V is applied to the inside lateral wall of the cylinder.
65

A current-density surface integral I0 is defined on the same surface, where the
integral is computed in the revolved domain. A frequency sweep is defined
from 1 to 250 kHz to capture the modal behavior of the cylinder over a broad
range of frequencies. The complex input impedance is defined as:
Z = V0/I0 (3.54)
From here, the electrical input impedance can be plotted as a magnitude and
a phase angle. The FEM results for electrical input impedance of the bare-
element case are shown in Fig. 3.15.
The finite element modeled impedance shows three distinct resonances,
whereas the equivalent circuit only predicts two (the radial and axial mode).
To interpret the three resonances predicted by FEM, the 3D mode shapes for
each resonance can be visualized in COMSOL. 3.16 shows the mode shapes
of the three distinct resonances predicted by the finite element model. The
mode shapes show that the first two resonances, which occur at 112 and 120
kHz, are likely variations of a radial mode coupled with a bending mode. The
bending mode likely arises from the fact that the cylinder’s length is equal to its
circumference. This modal behavior was unexpected because the equivalent
circuit is not capable of modeling bending modes; however, the equivalent
circuit and finite element model both agree that there is radial mode behavior
in the vicinity of 116 kHz. The highest frequency predicted resonance at
181 kHz is an axial mode, which is in good agreement with the axial mode
calculated by the equivalent circuit at 165 kHz.
66

0 50 100 150 200 250100
102
105
jZj,
[+]
Impedance of cylinder element without caps
0 50 100 150 200 250Frequency, [kHz]
-100
-50
0
50
100
Phas
e, [°]
COMSOLEquiv. Circuit
Figure 3.15: Modeled electrical input impedance of cylinder element. Thefirst resonance of the equivalent circuit is the radial mode, and the secondresonance is the axial mode.
Next, the model considers the effects of end-caps. As in the previous
case, the structure is free from any acoustic load. The results of the electrical
input impedance with the end-capped cylinder are shown in Fig. 3.17. The
model indicates that the two lowest radial-bending resonances are pushed to-
gether to form one single mode. This effect likely arises from the fact that
the end caps act as an additional radial stiffness in parallel with the open
ends of the cylinder. This increased stiffness couples the two distinct radial-
bending modes into one effective resonance. At the axial resonance, the end
67

(a) (c)(b)
Figure 3.16: FEM mode shapes of a piezoelectric tube. (a) 112 kHz; (b) 120kHz; (c) 181 kHz.
caps behave like masses added in series to the structure. This increase in mass
causes the axial resonance to decrease in frequency. The results of this model
illustrate the importance of using a stiff but light material for the end-caps. If
the caps are too compliant, then they are liable to flexural resonances and a
reduced band of operation; if the caps are too heavy, the axial resonance could
be significantly reduced in frequency.
Finally, the model considers the case where the sensing element is en-
capsulated in Stycast epoxy and submerged in water. The geometry of the
Sycast overmold is shown in Fig. 3.18. Due to the significant series increase
in mass from the Stycast, the fundamental resonance (and theoretical band-
width) is reduced to 60 kHz. If a wider bandwidth were required, it would be
advisable to use a potting material with a lower density or to design a thinner
potting layer. No additional parasitic resonances were caused by the addition
of the potting layer.
68

0 50 100 150 200 250100
102
105
jZj,
[+]
Impedance of cylinder element with caps
0 50 100 150 200 250Frequency, [kHz]
-100
-50
0
50
100
Phas
e, [°]
Equiv. CircuitCOMSOL
Figure 3.17: Electrical input impedance of cylinder element with end-caps.The first resonance of the equivalent circuit is the radial mode, and the secondresonance is the axial mode.
3.5.5 Scattering Characteristics
When an incoming wave is incident on the recording surface, a certain
amount of the wave will be scattered from each individual hydrophone. The
amount of scattering is dependent on the frequency of the incoming signal
and the size of the hydrophone. It is necessary to model the scattering of
a representative plane wave from an individual hydrophone to ensure that
the hydrophone’s scattered field will not interfere with the recorded outgoing
signals which enter the numerical simulation.
69

Stycast
overmold
Mounting
stem
Figure 3.18: Model geometry of hydrophone with overmold.
The scattering characteristics of the hydrophone were modeled for two
configurations:
1. Vertical configuration - the plane wave propagation is parallel to the
center axis of the cylinder.
2. Horizontal configuration - the plane wave propagation is normal to the
center axis of the cylinder.
The mounting configurations are illustrated in Fig. 3.19, showing the reference
direction of the plane wave and its incidence upon the hydrophone. The refer-
ence angle θ is defined such that the plane wave is incident on the hydrophone
at 180◦.
A background pressure condition is specified on the water domain,
where the plane wave amplitude is equal to 1 Pa. The plane wave direc-
70

θ
Figure 3.19: Hydrophone configurations: vertical (top) and horizontal (bot-tom).
tion is specified according to the desired hydrophone configuration. Due to
the 2D-axisymmetry, the COMSOL built-in plane wave expansion is required
to achieve the correct wave direction for the horizontal configuration. This fea-
ture requires extra setup and post-processing, and is outlined in the COMSOL
documentation [15].
To validate the FEM model, the horizontally mounted case is com-
pared against the analytical solution for the scattering from an infinitely long
isotropic elastic cylinder [16]. The scattered field is expressed in the form of
a directivity plot. The scattered field is plotted in dB down from the inci-
dent plane wave, where the forward-traveling plane wave is incident upon the
hydrophone at θ = 180◦. The modeled scattered field of the horizontal config-
uration is compared to the analytical solution in Fig. 3.21, where the dashed
line indicates the analytical solution.
71

The model is in good agreement with the analytical solution, showing
that the amplitude of the scattered field becomes larger as the wavelength
approaches the size of the hydrophone. At the highest frequency of the study,
the maximum of the scattered field is 50 dB down from the incident pressure
wave. After the FEM model has been validated, the model considers scattering
from the hydrophone in the vertical mounting condition. The magnitude of
the modeled scattered field in the vertical configuration is shown in Fig. 3.20.
Similar to the horizontal case, the majority of the scattered field lies in the
back-scattered plane, with a magnitude up to 50 dB down from the incident
wave.
Overall, the models show that the orientation of the hydrophone has a
small effect on the expected scattered field. In both cases, the back-scattered
field is stronger than the forward-scattered field, and the maximum amount of
scattered sound pressure from each individual hydrophone is expected to be
50 dB down from an incident plane wave.
Figure 3.20: FEM horizontal scattered field of the hydrophone. (-) FEM; (···)analytical.
72

Figure 3.21: FEM vertical scattered field of the hydrophone.
3.5.6 Directivity
0°
30°
60°90°
120°
150°
180°
210°
240°270°
300°
330°
-1.5
-1
-0.5 [dB]
FEM hydrophone horizontal directivity
3 kHz
6 kHz
9 kHz
Figure 3.22: FEM hydrophone horizontal directivity.
The directivity of the hydrophone can be modeled in COMSOL using
the principal of piezoelectric reciprocity. Similar to the scattering model, the
vertical and horizontal mounting positions are considered. Reciprocity is used
such that a background radiation condition is not required, and an electric
potential can be applied to the inner surface of the cylinder. The hydrophone,
73

0°
30°
60°
90°
120°
150°
180°
210°
240°
270°
300°
330°
-1.5
-1
-0.5 [dB]
FEM hydrophone vertical directivity
3 kHz
6 kHz
9 kHz
Figure 3.23: FEM hydrophone vertical directivity.
which now acts as a source, is allowed to radiate freely into the water domain,
where the far-field pressure amplitude is normalized and plotted as a function
of angle. The model shows that for both mounting cases, the hydrophone is
omnidirectional within 3 dB up to 9 kHz. In the vertical case, the hydrophone
becomes slightly directive at higher frequencies, with -1 dB nulls at the ends
of the hydrophone. The FEM horizontal and vertical directivities are plotted
in Figs. 3.22 and 3.23.
In early versions of the design, the model provided evidence that a long
mounting stem, similar to the one shown in Fig. 3.18, adversely affects the
directivity of the hydrophone. In an optimal design, the length of the mounting
stem should be minimized, or the mounting stem should be decoupled from
74

0°
30°
60°
90°
120°
150°
180°
210°
240°
270°
300°
330°
-4
-3
-2
-1 [dB]
FEM hydrophone vertical directivity [9 kHz]
Short stem
Long stem
Figure 3.24: FEM model of effect of mounting stem on hydrophone directivity.
the hydrophone entirely. An example of the change in directivity due to the
mounting stem is shown in Fig. 3.24.
3.5.7 Receive Sensitivity
To model receive sensitivity, a floating-potential condition is applied
to the inner boundary of the cylinder. A background radiation condition is
applied to the water domain, where a plane wave of amplitude 1 Pa propagates
in the global +z direction.
The modeled RVS is plotted in Fig. 3.25. When accounting for the
additional mass of the Stycast, the modeled RVS is in fair agreement with the
equivalent circuit. Both models show that the bandwidth is terminated the
75

radial resonance at 55-60 kHz. The difference in resonance can be explained
by minor differences in material properties and damping parameters between
the FEM model and the equivalent circuit.
The FEM model predicts a more pronounced decrease in sensitivity
at 40 kHz due to refractive effects, however, these effects do not alter the
flat-band sensitivity by more than 3 dB. Accounting for both models, the
predicted effective bandwidth of the hydrophone (where sensitivity does not
vary by more than 3 dB) is 55-60 kHz, with a receive sensitivity of -207 dB re.
1 V/µPa.
100
101
102
Frequency, [kHz]
-230
-225
-220
-215
-210
-205
-200
-195
-190
-185
RV
S, [d
B r
e 1 V
/P
a]
Modeled hydrophone RVS
FEM
Equiv. circuit
Figure 3.25: Modeled hydrophone RVS.
76

3.6 Prototype Characteristics
A prototype was constructed following the specifications outlined by
section 3.4. The cross-secion of the overmold was designed according to the
geometry shown in Fig. 3.18. Complete details of the prototype design and
construction are included in Appendix A. This section will characterize the pro-
totype against the models and performance targets. The as-built hydrophone
prototype is shown in Fig. 3.26.
Figure 3.26: As-built hydrophone prototype.
3.6.1 Input Electrical Impedance
At each stage of construction, the input electrical impedance was mea-
sured and compared against the models to identify defective elements, gluing
misalignments, and other construction defects. These defects were mainly ap-
parent as parasitic or unexpected resonances. Elements that failed to match
the modeled impedance were rejected. First, the impedance of a single cylinder
77

0 50 100 150 200 250100
102
105
jZj,
[+]
Impedance of cylinder element without caps
0 50 100 150 200 250Frequency, [kHz]
-100
-50
0
50
100
Phas
e, [°]
Equiv. CircuitCOMSOLMeasured
Figure 3.27: Electrical input impedance of cylinder element with end-caps.
element was measured and compared to the finite element and equivalent cir-
cuit models. The measured impedance of the bare cylinder element is plotted
in Fig. 3.27. The modeled resonances are in good agreement with the measure-
ment: the impedance curve reveals two closely-spaced resonances (which, as
discussed, are hypothesized to be coupled radial-bending modes) around 112
kHz, and a third resonance (determined to be an axial mode) at 180 kHz. The
close match in impedance indicates that the piezo material properties used in
the FEM model are accurate.
Once end-caps were glued to the cylinder and the epoxy had fully cured,
the impedance was remeasured. Similar to the FEM model, the two radial-
78

0 50 100 150 200 250100
102
105
jZj,
[+]
Impedance of cylinder element with caps
0 50 100 150 200 250Frequency, [kHz]
-100
-50
0
50
100
Phas
e, [°]
Equiv. CircuitCOMSOLMeasured
Figure 3.28: Measured electrical input impedance of cylinder element withend-caps.
bending resonances measured around 112 kHz were pushed together to form
one effective resonance at 120 kHz. Once again, this effect is most likely due
to the stiffness of the end-caps acting in parallel with the radial stiffness of the
cylinder. Additionally, the added mass of the end-caps decreased the frequency
of the axial mode to 160 kHz as expected. Next, 7 m of low-noise coaxial cable
was attached to the capped sensing element. No difference in impedance was
observed because the cable was relatively short and had a low capacitance.
The measured impedance of the end-capped cylinder is plotted in Fig. 3.28.
Finally, when the Stycast was potted around the sensing element, the
79

0 20 40 60 80 10010
2
105
Z, [
]
Impedance of cylinder element without caps
0 20 40 60 80 100
Frequency, [kHz]
-90
-85
-80
-75
-70
Phas
e, [°]
Equiv. circuitFEMMeasured
Figure 3.29: Measured electrical input impedance of potted hydrophone.
fundamental resonance was significantly decreased to 60 kHz. As previously
seen in the FEM and equivalent circuit models, this decrease in resonant fre-
quency is due to the series increase in mass from the Stycast. Overall, the
Stycast accounted for an added mass of 6.6 g. The impedance of the fully
assembled hydrophone is shown in Fig. 3.29. There is a mismatch between
impedance and resonance seen in the equivalent circuit, likely due to slight
material differences and damping parameters. In order to avoid the substan-
tial decrease in resonance (and reduction of bandwidth) caused by the Stycast,
it would be advisable to use as little potting material as possible. In this case,
a 3 mm-thick layer of Stycast was required to completely cover the solder joint
on the outside wall of the cylinder.
80

From the impedance measurement, the hydrophone can be expected to
have a bandwidth up to the fundamental resonance at 60 kHz. To truly cap-
ture the hydrophone bandwidth, a receive sensitivity measurement is required,
which can reveal unexpected performance issues that are not apparent in the
impedance.
3.6.2 Receive Sensitivity
The receive sensitivity was measured in a 12-foot deep tank at the Ap-
plied Research Laboratories at the University of Texas at Austin. A calibrated
reference hydrophone (USRD type H52) and the hydrophone prototype were
submerged to a depth of 6 feet, and were positioned an equal distance from
a broadband source (USRD Type F56 spherical source). The end of the hy-
drophone prototype cable was connected to a preamplifier with a gain of 26
dB. The source was excited with a 500 ms linear frequency-modulated (LFM)
chirp spanning from 1-200 kHz. 64 bursts were captured and averaged. The
signal was recorded with both the reference and the prototype hydrophones.
The recorded signals were cross-correlated, and the voltage sensitivity was
found as the ratio of spectral voltages as described in Ch. 1. The measured
RVS is plotted in Fig. 3.30.
The measured RVS is in good agreement with both the FEM and equiv-
alent circuit models. The measurement shows an approximate bandwidth of
60 kHz with a nominal receive sensitivity of -207 dB. It is worth noting that
a higher receive sensitivity could have been achieved by using a cylindrical
81

100
101
102
Frequency, [kHz]
-230
-225
-220
-215
-210
-205
-200
-195
-190
-185
RV
S, [d
B r
e 1 V
/P
a]Hydrophone RVS
FEM
Equiv. circuit
Measured
Figure 3.30: Measured hydrophone RVS.
element with a larger circumference.
3.6.3 Self-Noise
To measure the hydrophone self-noise, the hydrophone was submerged
in a tank of water at room temperature. The end of the hydrophone cable
was connected to a preamplifier with 26 dB of gain, and the preamplifier
output was directly connected to an oscilloscope. A 1 s time window was
recorded; this signal represented the sum of the hydrophone noise and the total
noise of the recording system. To account for the recording system noise, the
82

hydrophone was physically removed from the signal path and the input of the
preamplifier was shorted. The recorded system noise was deconvolved from the
first measurement (system noise plus hydrophone noise), leaving only the noise
from the hydrophone. In Fig. 3.31, the spectrum of the noise is presented as a
noise-pressure spectral density. The theoretical noise level, which is calculated
from the Johnson thermal noise, is plotted alongside. The majority of the
noise lies in the lower frequency bands, with a maximum spectral density of
40 dB re. 1 µPa/√Hz.
100 101
Frequency, [kHz]
-60
-50
-40
-30
-20
-10
0
10
20
30
40
50
[dB
re
(1 7
Pa)2 /
Hz]
H2-1E self-noise spectral density
MeasuredTheoretical
Figure 3.31: Hydrophone self-noise spectral density.
83

3.6.4 Dynamic Range
To reiterate from Ch. 2, the dynamic range of the system is defined as
the ratio of the maximum voltage resolution of the DAQ (VDAQ) to the RMS
noise floor of the hydrophone (NF ). The voltage resolution of the DAQ limits
the amplitude of the loudest possible undistorted signal, and the noise floor of
the hydrophone limits the amplitude of the smallest measurable signal. More
formally, dynamic range in dB is given by:
DR = 20×log10
(VDAQ
NF
)(3.55)
From the experimental measurements, the RMS noise floor of the hy-
drophone across the 10 kHz band was determined to be 9 µV. Given that the
WaveLab DAQ has a maximum voltage resolution of 1.414 VRMS, the hypo-
thetical dynamic range of the system is on the order of 104 dB. It is important
to note this value reflects only the noise floor of the hydrophone, and neglects
electrical noise of the system. In practice, the dynamic range will likely be
significantly reduced due to noise from the preamplifier and electrical inter-
ference from miscellaneous sources. This noise can be reduced by ensuring
that all electrical components are appropriately shielded and grounded, and
by using a high-quality preamplifier.
3.7 Summary
In summary, this chapter has presented the design of a hydrophone
with:
84

1. A bandwidth of 60 kHz.
2. A receive sensitivity of -207 dB.
3. Vertical and horizontal omnidirectionality up to 10 kHz.
4. A low amount of acoustic scattering from incident waves.
5. A low thermal-noise floor.
While the design is functional and satisfies the performance require-
ments, several parameters could be optimized for future revisions. The hy-
drophone performance is negatively impacted by the mass of the overmold,
which has been shown to limit the receive bandwidth and narrow the directiv-
ity. Future designs could consider making use of a thinner overmold, or using
a mounting stem that is mechanically decoupled from the hydrophone struc-
ture. Furthermore, the equivalent circuit model implies that the hydrophone
sensitivity and noise floor could be improved by using a sensing element with a
shorter length, thicker walls, and larger outer radius. However, a design with
this sensing element geometry was not considered, favoring the availability of
off-the-shelf piezoelectric elements.
Overall, the design presented in this chapter has been validated by a
comprehensive equivalent circuit model, a finite element analysis, and exper-
imental measurements. The performance of the hydrophone prototype meets
the targets outlined in Ch. 2, and is therefore suitable for use in the Wave-
Lab system. Several key design considerations have been discussed, such as
85

sensing element geometry, effects of end caps and stacked cylinder elements,
and cable length. Photos and drawings that pertain to the hydrophone fab-
rication process are shown in Appendix A. This thesis will proceed with an
in-depth analysis of the source design, which was developed in parallel with
the hydrophone design.
86

Chapter 4
Source Design
4.1 Source Design Theory
Acoustic sources are used to convert electrical signals into acoustic pres-
sures. Like the hydrophone, there are several design parameters and charac-
teristics that affect the efficiency of the voltage-to-pressure conversion. This
chapter will begin by discussing the general parameters that are important
when designing a source. These parameters include source level, directivity,
bandwidth, impulse response, and size.
4.1.1 Source Level
Source level is a direct measurement of the acoustic pressure produced
by a source for a given input voltage at a given distance, usually specified as
1 meter. Source level is related to TVR, but source level measurements do
not include a reference voltage or distance. Source level is a function of the
sinusoidally varying velocity at the radiating face of the source.
In Ch. 2, the system requirements specified that the source level must
be high enough to cancel boundary reflections. To meet this requirement,
the source level should be maximized while retaining a smooth undistorted
87

frequency response.
The basis of source level can be understood by investigating the acoustic
properties of a finite monopole. The time-harmonic pressure p of a general
pulsating sphere of radius a at a field point located at a radial distance r from
the radiating sphere is given as [10]
p = ρ0c0u0jka2
1 + jka
ej[ωt−k(r−a)]
r, (4.1)
where ρ0 and c0 are the density and sound speed of the acoustic medium,
respectively, ω is the angular frequency, and u0 is the velocity at the surface
of the sphere. Sound intensity (or sound power) is defined as the time average
of the energy flow through a unit area, and is given by
I =|p2|
2ρ0c0
(4.2)
From Eqs. 4.1 and 4.2, it can be seen that sound power is proportional
to the radius and surface velocity of the sphere. Therefore, in order to max-
imize source level, it is important to design a source such that its resonance
frequency lies within the desired band of operation. Further away from the
resonance frequency, a higher amount of power is required to maintain a given
surface velocity and source level.
4.1.2 Directivity
The source directivity, or beam pattern, is a measurement of the source’s
radiated pressure as a function of angle at a given frequency. One of the main
88

requirements established in Ch. 2 was that the sources should have uniform
distribution of radiated sound when mounted in the walls of the tank. More
broadly, the WaveLab requirements prescribe that the sources should behave
as point monopoles, or baffled simple sources.
A baffled simple source is defined as an infinite surface that is rigid (i.e.
has zero surface velocity), except for a small section which vibrates normal to
the surface [10]. The small vibrating section is known as the radiating piston,
and the surrounding surface is known as the baffle. The purpose of the baffle
is to restrict the sound field to the forward hemisphere, and to decouple the
sound field in the forward and backward hemispheres. The pressure at any
point in the acoustic field of a baffled circular piston of radius a is found by
taking the Rayleigh integral over the entire surface of the piston [10]. The
resulting pressure at any field point (r, θ) in the acoustic far-field is
p (r, θ; t) =jaρ0c0u0
r
J1(ka sin θ)
sin θej(ωt−kr), (4.3)
where ρ0 and c0 are the density and sound speed of the acoustic medium,
respectively, u0 is the piston velocity normal to the baffle surface, and J1 is
the first-order Bessel function of the first kind. The directivity of the baffled
piston is defined as the ratio of the pressure as a function of angle to the
on-axis pressure (θ = 0) such that
D (θ) =J1(ka sin θ)
sin θ. (4.4)
89

In the special case of an unbaffled circular piston, the directivity is
defined as [17]
D (θ)unbaffle =1
2(1 + cos θ)D (θ)baffle , (4.5)
where D (θ)baffle is the directivity of the baffled piston given by Eq. 4.4. This
expression is useful for cases where it is not practical to mount a source in
large rigid baffle. The ka � 1 directivity of a circular piston for the baffled
and unbaffled case is shown in Fig. 4.1
0°
30°
60°
90°
120°
150°
180°
-9 -6 -3 0 [dB]
Circular piston directivity, ka<<1
Baffled Unbaffled
Figure 4.1: Directivity of a circular piston for ka�1.
It is important to note that both the baffled and unbaffled directivity
functions require the piston to be vibrating uniformly with no amplitude or
phase variations across the radiating face. Phase and amplitude variations
can arise from parasitic resonances of the device or flexural resonances of the
piston head itself. When these phase variations occur, the source will no longer
90

behave as a point monopole and will radiate an uneven distribution of sound.
This places a high level of importance on the mechanical design of piston head,
which is further discussed in Sec. 4.1.6.
4.1.3 Bandwidth
The bandwidth, or frequency response of a source, is used to describe
the range of frequencies that the source can accurately reproduce. The source
bandwidth is defined as the region where the response does not vary by more
than +/- 3 dB, where the lowest usable frequency of the source occurs at
the fundamental resonance. At frequencies below resonance, the stiffness-
controlled impedance causes the piston velocity to rise rapidly at a rate of 6
dB per octave as the source approaches resonance. At resonance, the source
vibrates at maximum velocity, the electrical impedance is at a minimum, and
the TVR is at a maximum. Far above resonance, the impedance becomes
mass-controlled and the velocity falls at a rate of -6 dB per octave.
4.1.4 Size
The particle velocity and pressure of a finite-size monopole of radius a
is given by [10]
u(r) = u0a2 (1 + jkr)
r (1 + jka)
ej[ωt−k(r−a)]
r(4.6)
and
p = ρ0c0u0
jka2
1 + jka
ej[ωt−k(r−a)]
r(4.7)
91

respectively. The impedance at any field point r≥a is
Z =p
u(r)= ρ0c0
jkr
1 + jkr= ρ0c0
[k2r2
1 + k2r2+ j
kr
1 + k2r2
]. (4.8)
The mechanical impedance seen by the source is found by evaluating
Eq. 4.8 at the surface of the source (r = a) and then multiplying by the source
surface area such that
Zmech|r=a =Sp
u(r)|r=a = 4π a2ρ0c0
[k2a2
1 + k2a2+ j
ka
1 + k2a2
]. (4.9)
When the size of the source is large compared to a wavelength, i.e. ka�1,
the mechanical impedance seen by the source becomes entirely real and resis-
tive, and the source radiates efficiently into the acoustic medium. Conversely,
when the size of the source is much smaller than a wavelength, i.e. ka�1,
the impedance seen by the source is entirely reactive and no sound power is
radiated at all, meaning that it is very difficult for small sources to reproduce
low frequency sounds. It quickly becomes impractical to design a source that
is large compared to wavelength; one must keep in mind that the size of the
transducer is proportional to weight and cost. Specific to the WaveLab appli-
cation, the diameter of the piston head should be designed to be as large as
possible, given the space constraints, in order to maximize acoustic efficiency.
4.1.5 Impulse Response
An impulse response is defined as the reaction of a dynamic system in
response to a brief input signal, called an impulse. The impulse response of a
92

system provides time, frequency, and phase information about how the system
reacts to external change. The impulse response provides information about
the system transient response characteristics – an indication of how rapidly a
system at equilibrium can respond to an impulse and return to equilibrium.
The transient behavior of the system is characterized by the resonance fre-
quency and the amount of inherent viscous damping, which can be quantified
by the Q-factor and the damping ratio. The Q-factor is a dimensionless pa-
rameter that characterizes the bandwidth of a resonant peak relative to its
center frequency. A high Q indicates a lower amount of energy lost relative to
the stored energy of the system. The Q-factor of a given resonance is defined
as
Q = fr/∆f,hp, (4.10)
where fr is the center frequency of the resonance and ∆f,hp is the difference
of the frequencies at the half-power (3 dB down) points from the resonance.
The damping ratio, ξ, is directly related the Q-factor by ξ = 1/2Q. The
damping ratio, which affects the settling time of the system, falls into one of
three categories.
� Underdamped: the system oscillates with a decaying time envelope until
it reaches steady state. The rate of decay is proportional to the damping
ratio, where a high damping ratio corresponds to fewer oscillations until
steady state.
93

Figure 4.2: Example of an underdamped oscillator.
� Critically damped: occurs when the damping ratio is equal to one. The
critically damped system will quickly reach steady state without any
additional oscillations about the steady state value.
Figure 4.3: Example of a critically damped oscillator.
� Overdamped: the damping ratio is greater than one. There will be no
oscillations about the steady state value, but it will take longer to reach
the steady state value than the critically damped case.
94
Figure 4.4: Example of an overdamped oscillator.
The impulse response of a transducer will “color” its performance. In
other words, the frequency and time-dependent transfer function of the source
will be convolved with its input signal, resulting in a measured output that dif-
fers temporally and spectrally from the original signal. In theory, the WaveLab
system can account for these hardware signatures, but has limitations. The
source impulse response should be designed to color its output as little as
possible, meaning that in the frequency response domain there should not be
major fluctuations, and in the time domain there should be a smooth damped
response.
4.1.6 Mechanical Design
A nontrivial source design requirement is a housing mechanism that
protects the electrical components from the water. The housing should have a
minimal impact on the acoustic response of the source, and should be as acous-
tically decoupled from the source as possible to avoid unwanted interactions.
Additionally, the housing should aim to mechanically and acoustically decou-
ple the entire transducer assembly from the mounting panel. Typically, passive
95

materials such as urethane are used to insulate the transducer’s electronics and
cover any surfaces that are subject to corrosion. Because the sources are in-
tended only for shallow submersion, an air cavity inside the transducer housing
is deemed acceptable. For situations that involve higher hydrostatic pressures,
it would be advisable to oil-fill any air cavities.
The electrical cables attached to the source should be of low-enough
gauge to withstand high current for high-power applications. The cable gauge
is to be determined based on the power amplifier capabilities and the source
impedance. Additionally, to avoid degradation, the cable jacket should be a
waterproof material such as butyl-rubber or polyethylene.
The WaveLab theory prescribes that the sources will be spaced a max-
imum of 7.5 cm apart. This places a great importance on small form factor
for the transducer and the entire transducer housing. Due to the relationship
between piston radius and acoustic impedance, as outlined in Sec. 4.1.4, the
housing should allow for the largest possible piston radius.
A detailed design of the radiating piston head is required to avoid flexu-
ral resonances that occur within the band of operation. When the piston head
resonates in a flexure mode, the overall acoustic output is drastically reduced
and undesirable beam patterns begin to form due to phase variations across
the face of the piston. For this reason, pistons are typically tapered to increase
their geometric stiffness, thereby moving the flexural resonance far outside of
the band of operation. It is important to design a piston that is both light
and stiff to avoid such parasitic resonances.
96

4.2 Review of Low-Frequency Sources
From the low-frequency requirements of the WaveLab system, the source
must provide an adequate sound power level in the 1-10 kHz band. This sec-
tion will begin with an analysis and literature review the Tonpilz transducer
and flexural-type transducer, which are both commonly used in mid to low-
frequency applications. These transducers have unique response characteris-
tics, sizes, and mechanical design procedures. At the conclusion of this section,
a design candidate will be chosen and further developed.
4.2.1 Tonpilz Transducers
1
2
3
Figure 4.5: Prototype Tonpilz transducer. (1) Drive stack; (2) Tail mass; (3)Piston head.
97

Tonpilz transducers are typically used in sonar applications due to their
mid-frequency, high sound power capabilities [4, 13, 17]. The Tonpilz trans-
ducer consists of a narrow drive stack sandwiched between a heavy tail mass
and a light, stiff piston head. The drive stack is typically comprised of a drive
stack of active, parallel-wired piezoelectric rings which resonate in an axial
mode. The drive stack is used to actuate the piston head, and a heavy inertial
tail mass is positioned on the opposite side of the stack. The tail mass di-
rects the velocity of the drive stack to the piston head, thereby increasing the
piston velocity and radiated sound power [17]. The Tonpilz name (German
for “sound mushroom”) comes from the transducer’s characteristic mushroom-
like cross section. The Tonpilz transducer has the advantage of a simple and
low-cost construction, has a high sound output at resonance, and can be read-
ily modeled with an equivalent circuit to tune parameters such as resonance
frequency.
In the early stages of the project, a Tonpilz source prototype was con-
structed for preliminary in-situ tests in the WaveLab tank. The piston head
consisted of a large, relatively light head mass machined from aluminum, and
was driven by a stack of four axially-poled, parallel-wired piezoelectric rings.
A heavy tail mass was machined from steel and positioned at the rear of the
drive stack. The entire assembly was held in compression by a center bolt, and
was given a rudimentary coat of urethane to protect the electrical components.
The prototype exhibited a measured in-air resonance of approximately
20 kHz, with a TVR of 100 dB re. 1 µPa/V at 1 m at 10 kHz. It was concluded
98

that the as-built prototype was not able to meet the WaveLab system speci-
fications, due to the insufficient source level as a result of the high resonance
frequency. After further design and modeling, it was determined that a Ton-
pilz source with a sufficiently low resonance frequency would be impractically
large, heavy and bulky. For these reasons, the Tonpilz source was disqualified
as a design candidate. Fig. 4.5 shows the fully assembled Tonpilz prototype
before the addition of the urethane overmold.
4.2.2 Flexural Transducers
Flexural transducers have long been used in applications that require
very low resonance frequencies and compact sizes [4, 18]. Flexural transducers
make use of one or more piezoelectric elements, either bars, plates, or discs,
that are constrained to resonate in inextensional bending modes. These struc-
tures are typically much more compliant in bending than in tension, leading to
much lower resonance frequencies for a given size. An example of a piezoelec-
tric transducer that resonates in a bending mode is the trilaminar bender-bar.
The trilaminar bender-bar consists of an inactive electrode, usually
brass or copper, sandwiched between two thickness-poled piezoelectric bars.
The bars are both poled in the same direction relative to the assembly of the
drive stack. When an electrical potential is applied to the inactive electrode,
and a ground is applied to the electrodes on the opposite side of each bar,
the bars are met with opposing electric polarities but the same piezoelectric
poling direction. This causes the top bar to expand and the bottom bar
99

to contract, forcing the stack into a bending mode, where the neutral plane
is inextensional. A drive cycle is completed by reversing the electric polarity,
causing the inflection of the stack to flip. This concept is illustrated in Fig. 4.6,
showing the result of combining the motions of two individual bar elements.
While the trilaminar bender bar transducer is well suited for low-frequency,
small size applications, the problem lies in devising a mounting system for
holding the bar to maximize its usefulness.
+
-
- z
x
Figure 4.6: Illustration of the bender-mode drive stack, showing the piezoelec-tric poling direction and the direction of displacement of each plate.
4.2.3 Bender Mode X-Spring
The Bender Mode X-spring (BMX) transducer was originally identified
and patented in 2002 by Image Acoustics, Inc. [4, 19]. The patent desrcibes,
“An electro-mechanical transducer, which provides amplified piston motion
from an orthogonal drive direction... The piston motion is amplified by lever
arms, which are typically attached to a piezoelectric or electrostrictive drive
system. The arrangement allows a compact, high output transducer design.”
In principle, the BMX combines the low-frequency resonance of a trilaminar
bender-bar drive stack with a flextensional X-spring and a piston head. The
100

X-spring is a type of lever arm that translates and magnifies the rotational
velocity of the bending drive stack to +/−z motion of a piston head. The mass
of the drive stack is designed to be considerably higher than the spring and
piston mass, so that the drive stack behaves as an inertial reaction mass against
the moving mass of the piston in order to maximize the piston velocity. Like
the Tonpilz, the piston head is designed to be light and stiff, and is attached
to the center of the X-spring, the location of greatest motion. By design, the
face of the piston is larger than the face of the X-spring to achieve a higher
volume velocity of the source in the acoustic medium.
As detailed further on in this chapter, the most critical design com-
ponent of the BMX is the design of the X-spring. As the drive stack flexes
outwards, the arms of the X-spring are pushed outwards, causing the con-
nected piston head to move in the +z direction. Conversely, when the drive
cycle is reversed, the arms of the spring are pulled inwards and the piston head
moves in the −z direction. The lever arm has a length L given by L2 = a2 +b2,
where b is half the length of the drive stack and a is the inclination height of
the spring. The magnification of motion provided by the X-spring is a function
of the slope of the lever arms, given by
Mf =da
db= −b/a. (4.11)
Therefore, in order to maximize the magnification ratio, it is desirable to
increase b or decrease a. A diagram of the BMX source is shown in Fig. 4.7,
showing the bender-mode drive stack, X-spring, and piston head.
101

Figure 4.7: Bender mode X-spring (BMX) source showing the bending actionand piston motion in the z direction [4].
While not addressed by the patent, the most significant feature of the
BMX transducer is the fact that its fundamental resonance is dictated by the
X-spring geometry. If the X-spring lever arm is sufficiently thin, the drive stack
will excite a low frequency beam-bending mode within the X-spring structure,
which is directly translated to vertical motion of the piston. As observed from
models and measurements, it is possible to excite a fundamental mode in the
X-spring that is several kHz lower than the resonance of the bender drive
stack. This finding implies that resonance of the transducer can be fine-tuned
according to the relatively simple X-spring geometry, eliminating the need
for custom piezoelectric elements. A detailed analysis of the X-spring design
will be presented in Sec. 4.4. The performance characteristics outlined by the
patent indicate that the BMX source is suitable for use in WaveLab. The
chapter will proceed with an in-depth analysis of the BMX source, providing
the appropriate models and experimental measurements that verify the claims
of the patent. First, an equivalent circuit of the BMX transducer will be used
102

to further demonstrate the mechanisms of the transducer.
4.3 Equivalent Circuit
Figure 4.8: BMX equivalent circuit.
The equivalent circuit shown in Fig. 4.8 is a useful aid in understanding
the mechanics of the BMX transducer. The equivalent circuit comprises three
sections: the electrical domain, the mechanical drive stack domain, and the
mechanical X-spring and piston domain. As described in Sec. 4.2.3, the drive
stack consists of a thin copper or brass electrode sandwiched between two
axially-poled square piezoelectric plates. In the equivalent circuit, the drive
voltage is supplied at the input of the electrical domain, which comprises
the clamped capacity, C0, and the dielectric loss G0 of the drive stack. The
electrical impedance is transformed into a mechanical impedance through the
electromechanical turns ratio N .
The drive stack mechanical domain is comprised of the short circuit
compliance, CE, and mass M of the drive stack, which includes the mass of
both active piezoelectric elements and the copper or brass electrode. A resistive
term Rm is used to account for viscous damping and losses that occur within
103

the drive stack. Woollett [18] has analyzed the bender bar transducer and
has developed equivalent circuit parameters for a number of cases. The turns
ratio N is used to transform the input electrical impedance into a mechanical
impedance within the drive stack. At this stage, the drive stack imparts a
velocity ud into the hinge of the X-spring. The transformer turns ratio N
governs the proportional bending moment that is transferred from the drive
stack into the X-spring.
θ θ
Ms Ms
Cs Cs
w(x)
Figure 4.9: Illustration of the interaction between the bender bar and theX-spring.
A lumped element system, shown in Fig. 4.9, can be used to visualize
the interaction of the bender bar and the X-spring. The system is constrained
to two degrees of freedom: transverse displacement, w (x), and rotation θ.
When the bender bar and X-spring are coupled together, the bending motion
of the bar causes the hinge of the X-spring to rotate by an amount θ. This
rotational displacement is resisted by the compliance of the X-spring, Cs, which
effectively acts as a torsional spring. The parallel combination of Cs and the
mass of the X-spring and piston, Ms, leads to a flexural resonance of the X-
spring and subsequent motion of the piston at the velocity us. The resonance
of the X-spring can be tuned by adjusting the spring stiffness or the spring
104

and piston mass, however, since the piston velocity is reduced by the inertial
motion of the drive stack, it is important to minimize the mass of the spring
and piston.
The third stage of the circuit represents the X-spring, piston, and acous-
tic medium. The circuit components of this stage include the lumped X-spring
compliance, Cs and the mass of the X-spring and piston assembly, Ms. The
fundamental resonance of the transducer occurs when Cs resonates with Ms.
The velocity imparted into the X-spring by the bender bar is amplified by a
factor of −b/a due to the lever arm action of the X-spring, which results in ver-
tical motion of the piston. The piston is loaded by the radiation impedance Zr,
which lowers the fundamental resonance frequency and increases the damping.
The challenge in the derivation of the full equivalent circuit lies in the
spring-bender bar elastic boundary condition. To determine the bending mo-
ment exerted on the X-spring, the vertical deflection curve of the bender bar
must be known. If the bender bar was simply supported at its neutral axis, one
could assume that the deflection is purely parabolic, with maximum deflection
at the center of the bar and zero deflection at the ends of the bar. However,
this assumption does not hold when elastic supports exist at the ends of the
bar. Although the derivation of the equivalent circuit has been omitted from
this report, Woollett [18] has laid a foundation for the future work with the
derivation of the dynamic model of a bender bar coupled to elastic leaf hinge
supports. This derivation accounts for the mechanical and electrical proper-
ties of the elastically supported bender bar, and accounts for the suspension
105
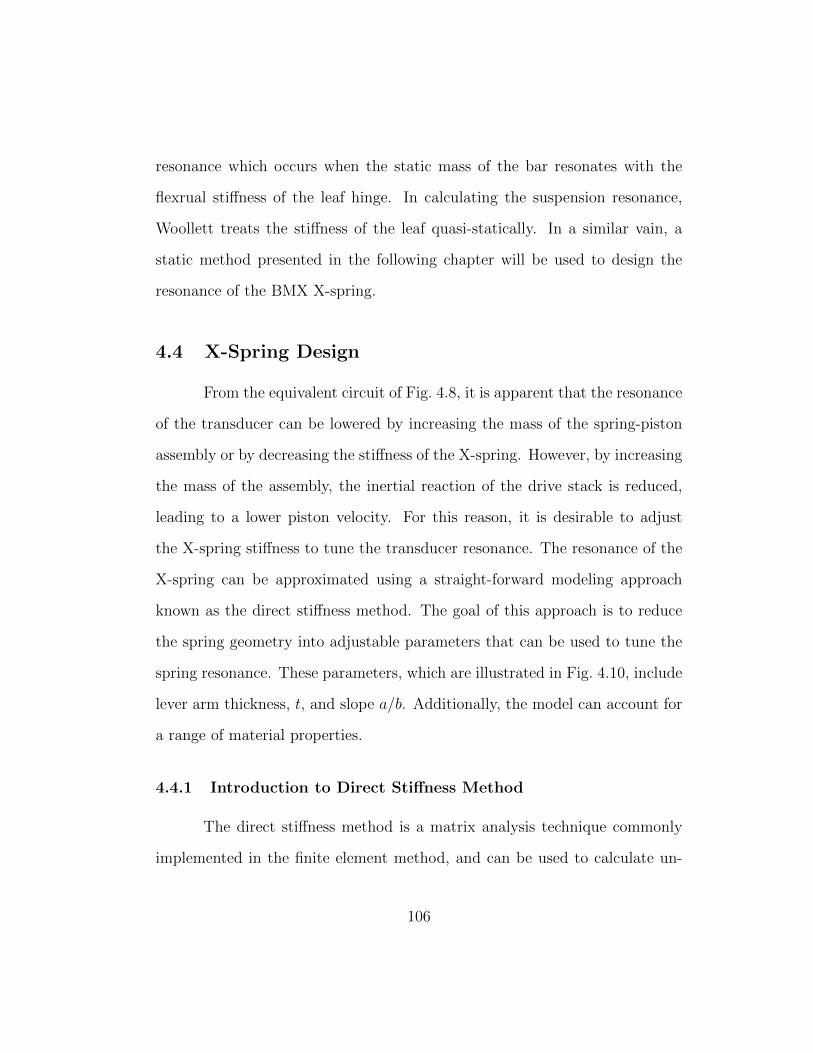
resonance which occurs when the static mass of the bar resonates with the
flexrual stiffness of the leaf hinge. In calculating the suspension resonance,
Woollett treats the stiffness of the leaf quasi-statically. In a similar vain, a
static method presented in the following chapter will be used to design the
resonance of the BMX X-spring.
4.4 X-Spring Design
From the equivalent circuit of Fig. 4.8, it is apparent that the resonance
of the transducer can be lowered by increasing the mass of the spring-piston
assembly or by decreasing the stiffness of the X-spring. However, by increasing
the mass of the assembly, the inertial reaction of the drive stack is reduced,
leading to a lower piston velocity. For this reason, it is desirable to adjust
the X-spring stiffness to tune the transducer resonance. The resonance of the
X-spring can be approximated using a straight-forward modeling approach
known as the direct stiffness method. The goal of this approach is to reduce
the spring geometry into adjustable parameters that can be used to tune the
spring resonance. These parameters, which are illustrated in Fig. 4.10, include
lever arm thickness, t, and slope a/b. Additionally, the model can account for
a range of material properties.
4.4.1 Introduction to Direct Stiffness Method
The direct stiffness method is a matrix analysis technique commonly
implemented in the finite element method, and can be used to calculate un-
106

t
a
b
Figure 4.10: Parametric X-spring geometry.
known joint displacements and structural eigenfrequencies. In the direct stiff-
ness method, local member force-displacement relationships are expressed in
terms of unknown displacements and internal forces. Under equilibrium, the
method can be used to directly solve for unknown displacements, internal
forces, and the eigenfrequencies of the structure. The method assumes that
the X-spring can be represented as a structure comprised of 2D prismatic
isotropic Euler-Bernoulli beam elements with simple structural constraints.
Further, the method assumes that plane sections remain plane, there are no
distributed loads along the beam, and neglects the effects of rotary inertia.
Using Euler-Bernoulli beam elements, the analysis direct is capable of
accounting for bending moments and axial forces inside the beam elements.
An unconstrained Euler-Bernoulli frame element has a total of six degrees of
freedom, including horizontal translational, vertical translational, and rota-
tional displacements. The six degrees of freedom of an Euler-Bernoulli frame
element are illustrated in Fig. 4.11.
The procedure of the direct stiffness method, for any arbitrary beam
element, is as follows [20]:
107

θi θj
p
MiMj
Figure 4.11: Frame element with combined rotational and axial displacements.
1. Define nodal coordinates, element locations, beam properties, applied
loads and structural constraints.
2. Calculate and define the basic properties of individual members, includ-
ing stiffness k, mass M ′, and inclination angle α.
3. Transform the basic element properties from local coordinates to a global
coordinate system, and assemble a global stiffness matrix [K] and mass
matrix [M ].
4. Formulate the applied load vector {F} and nodal displacement vector
{r}. Reduce the system appropriately given boundary conditions from
structural constraints.
5. Solve for free nodal displacements, support reactions, and eigenfrequen-
cies of the structure.
108

α2
3
1
2
u2
v22
u1
v11
A, E, I, L
A, E, I, 0.5L
b
a
Figure 4.12: Frame analysis of X-spring showing reduced degrees of freedom.
4.4.2 Defining Nodes, Elements, and Boundary Conditions
The nodal coordinates are defined according to the geometry of the
X-spring, where each representative beam element has two nodes. The nodal
coordinates are parameterized by the height and length of spring lever arm,
a and b respectively. These coordinates define the locations of the beam ele-
ments, where the length of each element is given by L. To accurately repre-
sent the X-spring geometry, the hinge arm (which is attached to an ideal drive
stack) between nodes 1 and 2 is assumed to equal to L/2.
Once the element locations are defined, material and geometric prop-
erties are prescribed to each beam element. It is assumed that the spring
extends out of the page by an amount equal to b. The third tuneable pa-
rameter is the thickness of the element, t. Figure 4.12 is an illustration of
the simple frame structure that is used to represent the symmetric left half of
109

the X-spring geometry. Element 1 represents the hinge, which is subject to
the drive stack bending moment, and element 2 represents the spring lever
arm. Before constraints are applied, each node is subject to three degrees of
freedom: u, v, and θ.
Next, boundary conditions are imposed upon the system. The reso-
nance of the spring is most accurately modeled with a free-fixed boundary con-
dition, where nodes 1 and 2 are unconstrained and node 3 is completely fixed
against translation or rotational displacement. A clockwise-positive bending
moment is applied to node 1 to represent the moment applied by the bender
drive stack. The applied moment and nodal constraints will be used to reduce
the system degrees of freedom and solve for nodal displacements.
4.4.3 Basic Element Stiffness
Next, the basic member stiffness, force, displacement, and mass matri-
ces are formulated. The unconstrained element has combined rotational and
axial translational displacements,
{r} =
uvθ
, (4.12)
basic member force,
{S} =
Mi
Mj
θ
, (4.13)
110

and basic member stiffness
[k] =E
L
4I 2I 02I 4I 00 0 A
. (4.14)
These components govern the basic stiffness relation {S} = [k]{v}. After
the basic stiffness is calculated for elements 1 and 2 , the basic-to-local and
local-to-global coordinate transformations are applied.
4.4.4 Local to Global Transformation
To assemble a complete stiffness and mass matrix relationship, all con-
stitutive elements must use a consistent, global coordinate system. Basic forces
{S} and nodal displacements {v} within the individual elements are converted
to local forces {F ′} and local displacements {r′} through the basic-to-local
transformation matrix
T =
0 1/L 1 0 −1/L 00 1/L 0 0 −1/L 1−1 0 0 1 0 0
. (4.15)
The local stiffness relationship becomes {F ′} = [k′]{r′}, where the transformed
local element stiffness is given by
[k′] = TT [k]T. (4.16)
Similarly, the local mass matrix given by the Euler-Bernoulli beam theory
111

becomes
[M ′] =ρAL
420
140 0 0 70 0 00 156 22L 0 54 −13L0 22L 4L2 0 13L −3L2
70 0 0 140 0 00 54 13L 0 156 −22L0 −13L −3L2 0 −22L 4L2
. (4.17)
To transform local coordinates to the global system, the inclination
component matrix, LD, is used to account for the inclination angle α of each
element such that
LD =
[LB 00 LB
], (4.18)
where
LB =
cosα sinα 0− sinα cosα 0
0 0 1
. (4.19)
The global element stiffness transformation is found by applying
[K] = LTD [k′]LD. (4.20)
Likewise, the global element mass is given by
[M ] = LTD [M ′]LD. (4.21)
Once each element’s stiffness and mass is expressed in terms of the
global coordinate system, the global matrices can be assembled. The global
112

matrices are assembled by summing the stiffness or mass contribution of each
element at the appropriate degree of freedom. The result is a 9 × 9 stiffness
matrix and a 9×9 mass matrix. Next, boundary conditions are enforced based
on the structural constraints.
4.4.5 Applied Load and Nodal Displacement Vectors
The X-spring structural constraints take the form of free and fixed con-
ditions. Each node of the system has a structural constraint. For free degrees
of freedom, reaction forces are set to zero and displacements are unknown;
for supported degrees of freedom the displacements are set to zero and the
reaction forces are unknown. The moment M is applied to the bender drive
stack to node 1. Node 2 is completely unconstrained and has unknown dis-
placement component. Node 3 is fixed, therefore, the displacement component
is zero and the internal reaction forces are unknown. There are 2 degrees of
freedom for each node, and the force and nodal displacement vectors are each
of size 9× 1. The nodal displacement vector becomes
{r} =
u1
v1
θ1
u2
v2
θ2
u3
v3
θ3
=
u1
v1
θ1
u2
v2
θ2
000
, (4.22)
113

and the load vector becomes
{F} =
Fu,1
Fv,1
Fθ,1Fu,2
Fv,2
Fθ,2Fu,3
Fv,3
Fθ,3
=
00M
000Fu,3
Fv,3
Fθ,3
. (4.23)
To enforce the boundary conditions, the rows and columns of the stiffness and
mass matrix are reduced where displacements are zero. In total, each matrix is
reduced by three degrees of freedom, and each matrix has size 6×6. Likewise,
the force and displacement vectors are each reduced to size 6× 1. The system
has a total of six degrees of freedom.
4.4.6 Displacement and Eigenvalue Solutions
When the matrices have been appropriately reduced by the boundary
conditions, the nodal displacements are found by inverting the reduced stiffness
matrix such that
{rred} = [Kred]−1{Fred}. (4.24)
To solve for the eigenvalues of the system, the mass, stiffness and dis-
placements are related by a reduced form of the equation of motion. Assuming
no damping, the equation of motion, in matrix form, reduces to
[M ]{u}+ [K]{u} = 0. (4.25)
114

A time-harmonic solution is assumed such that
{u} = {Φ}ejωt, (4.26)
where Φ is the eigenvector or mode shape. Substituting into the equation of
motion and appropriately reducing yields the eigenequation([K]− ω2[M ]
){Φ} = 0. (4.27)
The representation of 6 × 6 stiffness and mass matrices in the eigenequation
leads to a set of 6 discrete eigenfrequencies ω2i where the ith natural frequency
of the X-spring is given by fi = ωi/2π. Finally, the fundamental resonance of
the X-spring is given as the first eigenfrequency.
While the direct stiffness tool only serves to estimate the resonance of
the X-spring, the calculated resonances are in good agreement with measure-
ments and FEM, as shown in Sec. 4.7.1. In reality, the direct stiffness method
is an oversimplification of the X-spring structure, because it neglects the stiff-
ness boundary condition of the drive stack, and does not account for wave
motion within the spring. However, the purpose of the model is to provide
a rapid evaluation of the X-spring resonance given a certain geometry. For
a more in depth analysis of the X-spring, FEM will be used to validate the
results of the direct stiffness model, and will also be used to examine the mode
shapes of the X-spring and the transducer assembly.
115

4.5 COMSOL Finite Element Model
A finite element analysis was performed to predict the performance of
the BMX source relative to the experimentally measured quantities of the as-
built prototypes. Compared to the direct stiffness model, the FEM model can
account for complex eigenmodes of the X-spring, and provides a more accu-
rate representation of the interaction between the drive stack and the X-spring.
Ideally, after designing the geometry of the X-spring from the direct stiffness
model, one would use FEM to model the as-built transducer assembly. This
section will begin by detailing the setup of the FEM model in COMSOL Mul-
tiphysics. The model setup mirrors the setup of the hydrophone FEM model,
which includes geometry definition and material selection, physics implemen-
tation, and meshing considerations. The FEM results are compared directly
to measurements in Sec. 4.7.
4.5.1 Model Definition
To reduce computational cost, the prismatic geometry of the BMX
transducer can be entirely represented in a 2D domain. Although the con-
sistency between 2D and full 3D models has been verified, the 2D model is
incapable of modeling fabrication errors, such as drive stack misalignment,
which has been observed to cause uneven phase variations throughout the X-
spring and piston head. The model outputs of the FEM study include mode
shapes of the X-spring, electrical input impedance, piston velocity, transmit
voltage response (TVR), and directivity.
116

4.5.2 Physics Implementation
The transducer model is implemented similarly to the hydrophone FEM
model, utilizing COMSOL’s Pressure Acoustics, Solid Mechanics and Electro-
static physics modules. The Pressure Acoustics module is used to solve the
constitutive Helmholtz wave equation in the water domain. A far-field pres-
sure calculation is defined on the boundary between the water domain and the
perfectly matched layer (PML), which allows for the calculation of the ampli-
tude and phase of the far-field pressure radiated by the source. The far-field
pressure variable is used to compute TVR and the directivity of the source.
The Solid Mechanics module is applied to the entire transducer struc-
ture, include X-spring, piston head, and drive stack. The module uses linear
stress-strain equations with a small deformation assumption. An isotropic loss
factor is applied to each mechanical component to model viscous damping; the
amount of loss is adjusted based on the Q-factor of the resonances measured
in the in-air electrical input impedance. The piezoelectric element material
model is left unchanged from COMSOL’s default +z poling direction, since
both active elements of the drive stack are axially poled in the same direction.
A line average is defined to the piston head boundary, used to measure the
average normal velocity amplitude and phase of the piston head.
The electrostatics module is applied to both of the active drive stack
elements. An electric potential, V0, is specified on the electrode boundaries,
and a ground is defined on outer lateral surface of each element. A surface in-
tegral is specified on the electrode boundaries to calculate the electrical input
117

impedance. The 2D COMSOL geometry of the drive stack, showing piezoelec-
tric poling direction and the polarity of the applied electric field, is shown in
Fig. 4.13.
1
2
-
-
+
+
Figure 4.13: BMX drive stack geometry.
The physics modules are linked through the Acoustic-Structure Bound-
ary and Piezoelectric Effect Multiphysics coupling modules. The Acoustic-
Structure Boundary, which links the Pressure Acoustics and Solid Mechanics
modules, is applied to the interface of the water domain and piston head. Ra-
diation impedance is accounted for in the Solid Mechanics interface, where the
fluid load effectively acts as a mechanical load. The Piezoelectric Effect mod-
ule couples the Electrostatics and Structural Mechanics modules by solving
the constitutive linear piezoelectric equations.
PZT-5H material properties are applied to the active drive stack ele-
118

ments, copper material properties are applied to the drive stack electrode, and
aluminum material properties are applied to the X-spring and piston struc-
ture. The face of the piston is exposed to an unbounded water domain, which
is surrounded by a PML to absorb propagating background radiation. The
COMSOL geometry of the full transducer assembly is shown in Fig. 4.14.
1
3
2
Figure 4.14: BMX assembly geometry. (1) bender-bar drive stack; (2) X-spring; (3) piston head
The directivity and source pressure level are calculated in the same
manner described in Sec. 3.5. The TVR, as calculated from the modeled
source pressure level, is given by [21]
TVR = 20 logpRMS/VRMS
1µPaV −1. (4.28)
where pRMS is the RMS pressure at 1 m from the piston head and VRMS is
119

equal to 1 V. pRMS is computed as
pRMS =
√1
2pp∗, (4.29)
where the pressure p at 1 m from the face of the piston is obtained using
COMSOL’s farfield pressure expression pfar(0,1)1. The variable p∗ is the
complex conjugate of the pressure p, given by conj(pfar(0,1)).
4.6 Prototype Specifications
A prototype BMX source was constructed using off-the-shelf piezoelec-
tric elements along with a custom-machined X-spring/piston assembly. The
components of the transducer are listed below, with relative geometries, ma-
terials, and a brief description of the fabrication process.
1. The drive stack consisted of two thickness-poled square piezoelectric
plates made from APC 850 ceramic 2. The plates measured 25.4 mm
per side, with a thickness of 3.18 mm. The plates were silvered on the
top and bottom faces. The drive stack was assembled using a conductive
silver epoxy to glue a 1 mm thick square copper electrode in between
the two piezoelectric plates. A positive lead was soldered to the cop-
per electrode, and ground leads were soldered to outward-facing silvered
1The pfar variable has changed to pext as of COMSOL version 5.4.2APC 850 is a proprietary ceramic manufactured by APC International. It is approxi-
mately equivalent to PZT-5 ceramic.
120

faces of the assembled drive stack. The assembled drive stack is shown
in Fig. 4.15.
2. To achieve a low resonance frequency, the X-spring was designed to be
as thin as possible to avoid significant tool chattering during the milling
process. The piston was milled seperately from the X-spring, and the two
components were fastened together with machine screws. Referencing
the dimensions described in Sec. 4.4.2, the X-spring lever arm had an
average thickness of 0.9 mm, a length b of 12.7 mm, and a height a of 0.6
mm. The piston head was designed with a diameter of 47 mm, with a
tapered center to prevent head-flexure resonances from occurring in the
frequency band of operation.
3. Kapton tape was applied to edges of the drive stack to prevent an elec-
trical short between the drive stack and spring/piston assembly, and the
drive stack was epoxied into the assembly. The full as-built assembly is
shown in Fig. 4.16.
4. The assembly was placed into a hollow cylindrical housing machined
from PVC, with a flange around the circumference of the housing for
mounting purposes. A small bead of RTV silicone was spread inside the
gap in between the piston and the housing to prevent urethane from
leaking inside the housing cavity. A thin layer of urethane was poured
on top of the piston to protect the piston head from corrosion. The fully
potted and housed transducer is shown in Fig. 4.17.
121
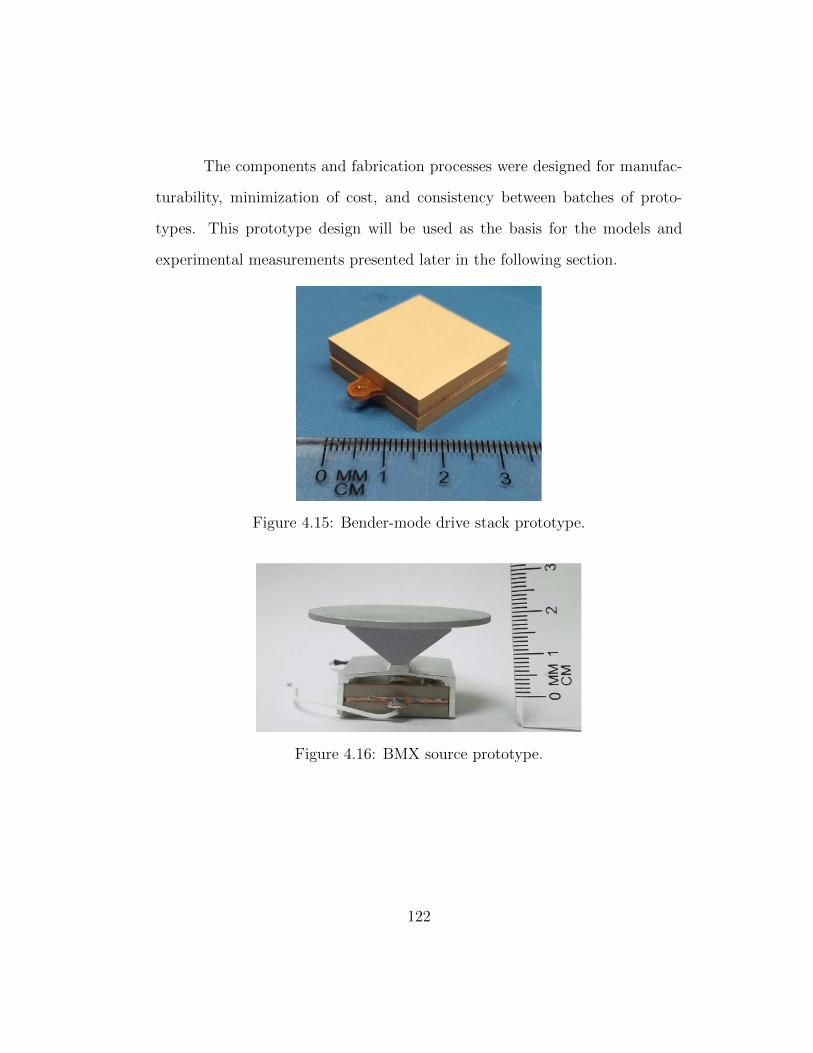
The components and fabrication processes were designed for manufac-
turability, minimization of cost, and consistency between batches of proto-
types. This prototype design will be used as the basis for the models and
experimental measurements presented later in the following section.
Figure 4.15: Bender-mode drive stack prototype.
Figure 4.16: BMX source prototype.
122

1
2
Figure 4.17: BMX prototype in housing. (1) urethane sealing layer; (2) PVChousing with mounting flange.
4.7 Prototype Characterization
4.7.1 Eigenmodes of the X-Spring
The eigenfrequencies of the 0.9 mm-thick X-spring spring were approx-
imated using the direct stiffness method outlined in Sec. 4.4.2. To validate the
model, the results were compared to a simplified FEM model of the X-spring
structure. The simplified FEM model consisted of the same beam geometry,
material properties, and boundary conditions that were used in the direct stiff-
ness model. From here, a more complex 2D FEM model was used to compute
the eigenmodes of the fully assembled transducer, and the resonances and cor-
responding mode shapes were compared to the results of the direct stiffness
model and the simplified FEM model.
123

The direct stiffness model was computed using the beam geometry
listed in Sec. 4.6 along with aluminum material properties, resulting in a pre-
dicted X-spring resonance of 3.1 kHz. The deformed mode shape as predicted
by the direct stiffness method is plotted in Fig. 4.18. Similary, the simpli-
fied FEM X-spring model predicted a fundamental resonance of 3.4 kHz. The
FEM-computed mode shape is shown in Fig. 4.19, showing a nearly identi-
cal deformation to that predicted by the direct stiffness model. The direct
stiffness model slightly under-predicts the spring resonance estimated by the
FEM model, likely due to simplifications assumed by the Euler-Bernoulli beam
method. Nonetheless, the nearly identical solutions validate the direct stiffness
method. This tool can be used to rapidly design the X-spring resonance, elim-
inating the need to iterate through computationally expensive FEM models.
The direct stiffness tool lacks the ability to predict the change in reso-
nance that occurs when the bender bar drive stack is coupled to the X-spring.
For this reason, a more complex 2D FEM model is developed. Using the same
X-spring dimensions and material properties as the simplified FEM model, an
in-air study was carried out on the fully assembled transducer, active drive
stack included. The resonance of the transducer was located by examining the
modeled electrical input impedance, revealing a fundamental resonance fre-
quency of 3 kHz. The corresponding deformed mode shape of the transducer,
shown in Fig. 4.20, indicates that, as expected, the X-spring lever arms vi-
brate in a bending mode, and actuate the piston in the z direction. The in-air
124

0 5 10
mm
-2
0
2
4
6
8
10
mm
X-spring mode shape, direct stiffness method
2 32
1
1
Figure 4.18: First mode shape of the X-spring as computed by the directstiffness method, falling at 3.1 kHz.
resonance of 3 kHz is reasonably close to the resonance frequency estimated
by the direct stiffness model.
Although the direct stiffness method is an oversimplification of the
physics of the X-spring, it can be seen that the model provides a good approx-
imation for the transducer resonance, and provides insight to the behavior of
the X-spring. As an ideal application, one would use the direct stiffness model
to roughly design the X-spring geometry, and would afterwards program the
geometry into a more complex FEM model. In this case, the outputs of the
complex FEM model are described in the following subsections.
125

Figure 4.19: FEM mode shape of the X-spring frame element.
Figure 4.20: FEM mode shape of the X-spring.
126

4.7.2 Electrical Input Impedance
Electrical input impedance measurements were made in several steps
to check for fabrication flaws and consistency with the FEM model. First,
the impedance of the standalone bender bar drive stack was measured, using
a frequency sweep of 100 Hz to 50 kHz to capture the full resonant behavior
of the drive stack. To verify the piezoelectric material properties used in the
FEM model, the measured and modeled impedances were compared, assessing
alignment of the resonances and antiresonances. It is essential to verify FEM
material properties because, as seen in Ch. 3, a slight material mismatch can
can lead to inaccurately modeled resonances and acoustic responses. A fun-
damental resonance of the drive stack was observed at 30 kHz, which tracked
well with the FEM model. At resonance, the FEM-calculated mode shape
indicated that the drive stack vibrates with the expected flexural motion. The
impedance of the bender-mode drive stack is shown in Fig. 4.21, and the FEM
mode shape is shown in Fig. 4.22.
Next, the drive stack was epoxied into the X-spring/piston assembly.
The upper frequency of the impedance sweep was narrowed to 10 kHz to
increase the frequency resolution in the desired band of operation. The trans-
ducer was held so that no surfaces were constrained and the impedance was
measured, indicating a fundamental resonance at approximately 3 kHz. This
measured resonance tracks well with the X-spring resonance modeled by the
direct stiffness method, the simplified FEM spring model, and the FEM full
assembly model.
127

0 10 20 30 40 50 6010
0
105
Z,
[]
Bender drive stack impedance
0 10 20 30 40 50 60
Frequency, [kHz]
-100
-50
0
50
100
Ph
ase,
[°]
Measured
FEM
Figure 4.21: Impedance of bender-mode drive stack.
4.7.3 Piston Velocity
At various stages of fabrication, the normal velocity of the piston head
was measured with a scanning laser doppler vibrometer (LDV) to provide an
accurate benchmark of prototype performance, and to check for fabrication
errors and consistency with models. The major benefit of the LDV is the
ability to predict the acoustic response of the transducer at non-waterproof
stages of fabrication. This eliminates a good degree of uncertainty, where
problems can be identified at specific processes instead of not knowing what is
128

Figure 4.22: Drive stack FEM mode shape.
happening when it’s underwater. Similar to the benefit of the input impedance
measurement, the LDV can help to identify unexpected resonances and piston
head phase variations that could affect the acoustic response of the transducer.
First, the piston normal velocity was measured for the full transducer
assembly without housing and potting. The transducer was suspended in the
air with soft elastic bands to avoid constraining the vibration in any direc-
tion. A linear frequency-modulated (LFM) chirp with an amplitude of 50Vpp
was driven through the source, and the corresponding velocity magnitude and
phase was measured at approximately 50 points over the entire surface of the
piston. Confirming the FEM model predictions, the piston velocity measure-
ments indicate a sharp, high-velocity resonance at 3 kHz. At this frequency,
the velocity phase is consistent for each of the 50 measurement points, indicat-
ing uniform motion of the piston. The measured piston velocity is compared
to the FEM model in Fig. 4.23. Comparing the measurement to the FEM
model, velocity magnitude and phase are both in agreement, showing that the
129

velocity undergoes a 180◦ phase shift at resonance.
1 2 3 4 5 6 7 8 9 10
10-4
10-2
Vel
. M
ag.,
[m
/s /
V]
BMX piston velocity in air, no housing
1 2 3 4 5 6 7 8 9 10
Frequency, [kHz]
-100
-50
0
50
100
Ph
ase,
[°] Measured
FEM
Figure 4.23: In-air piston velocity of bare BMX assembly.
Next, the source was sealed inside the PVC housing with RTV silicone,
and a thin layer of urethane was potted on the face of the transducer. The
normal velocity of the newly-potted piston face was remeasured with an iden-
tical experimental setup. The results, plotted in Fig. 4.24, indicate that the
resonance was slightly reduced in frequency and was moderately damped. In
reality, the damping due to the potting was desirable in that the bandwidth
of the transducer was significantly widened, marked by the increase in piston
130

velocity in the off-resonance band. However, caution must be exercised when
designing the potting mechanism; in the fabrication process it was observed
that excessive amounts of RTV sealant and urethane clamped the piston, ef-
fectively increasing the stiffness of the system. In some drastic cases, this
error led to an increase in resonance frequency by up to 2 kHz. Once the LDV
measurements had inidicated that the finished prototype was satisfactory, a
range of acoustic tests were performed to further characterize the source.
1 2 3 4 5 6 7 8 9 10
10-4
10-2
Vel
. M
ag.,
[m
/s /
V]
Measured BMX piston velocity
1 2 3 4 5 6 7 8 9 10
Frequency, [kHz]
-100
-50
0
50
100
Ph
ase,
[°]
No housing
Housing
Figure 4.24: Effect of housing on measured BMX piston velocity.
131

4.7.4 Transmit Voltage Response
Transmit voltage response of the BMX prototype was measured at the
ARL Lake Travis Test Station (LTTS), a specialized underwater acoustics
research facility located on Lake Travis in Austin, Texas. The source was
attached to a rotating column and was submerged to a depth of 9 m. The
source was driven by an LFM chirp spanning from 100 Hz to 20 kHz, with
a drive voltage of 100 Vpp. The emitted signal was recorded with a USRD
H52 standard hydrophone at a distance of 12 m. Several averages were taken
to account for miscellaneous background noise. The RVS of the standard
hydrophone was deconvolved from the recorded signal to recover the unaltered
frequency-dependent response of the source. The measured TVR is compared
to the TVR predicted by FEM in Fig. 4.25.
The measured TVR is in fair agreement with the FEM model, with
the most notable difference being the resonance frequency and Q-factor. The
predicted resonance is roughly 800 Hz lower than the measured resonance.
This same difference was observed in the LDV-measured piston velocity from
Fig. 4.23, indicating that the difference in resonance can be attributed to dif-
ferences in the as-built X-spring from the FEM model. The difference between
model and measurement emphasizes that the X-spring is very sensitive to mi-
nor changes in geometry, which in some cases arise purely from the machining
process. To achieve close agreement between measurement and model, it is
imperative to specify tight machining tolerances on the thickness of the spring
lever arm. Further differences seen in the measurement can be attributed to
132

1 2 3 4 5 6 7 8 9 10
Frequency, [kHz]
80
90
100
110
120
130
140d
B r
e 1
P
a/V
@ 1
mTVR of BMX source
Measured
FEM
Figure 4.25: TVR of BMX source.
the manner in which the piston is sealed and overmolded into the housing.
4.7.5 Directivity
The source directivity was measured at LTTS at select frequencies.
The source was mounted to a rotating column and submerged to a depth of
9 m. The column was initially positioned such that the center axis of the the
piston head was aimed at the acoustic axis of the standard hydrophone, with
this beginning position marked at θ = 90◦. A 10-cycle sinusoidal tone burst
was driven through the source at a given frequency, and several averages were
recorded. The column was rotated by a small amount and the source signal
was recorded at the new angle. This process was repeated until the full 180◦
133

beam pattern had been captured at each of the desired frequencies.
To process the recordings into a coherent directivity plot, a window
was specified around the steady-state portion of the direct arrival of the source
signal at each angle. The source amplitude at every angle was found by taking
the mean of the Hilbert transform of the windowed direct arrival, and the
amplitudes over all angles were normalized with respect to the signal with the
highest amplitude. The BMX directivity at 9 kHz is plotted in Fig. 4.26.
0°
30°
60°
90°
120°
150°
180°-9 -6 -3 0 [dB]
BMX unbaffled direcitivity, f = 9 kHz
Measured
FEM
Theory
Figure 4.26: Measured BMX beam pattern at 9 kHz.
The measured directivity was directly compared to the FEM model
and the analytical solution for an unbaffled piston from Sec. 4.1.2, demon-
strating agreement within 1 dB between the measurement the models. As
further observed in Sec. 4.1.2, piston directivity theory prescribes that the
BMX transducer will gain nearly 7 dB in directivity at θ = 0◦ and θ = 180◦
134

when placed inside of a baffle. A comparison of theoretical beam patterns of
the BMX transducer at 9 kHz is shown in Fig. 4.27. This provides conclusive
evidence that the source will exhibit omnidirectionality when mounted on the
emitting surface of the WaveLab tank. One factor that would potentially alter
the source directivity is acoustic coupling from the source into the emitting
surface, causing the emitting surface to deviate from a perfectly rigid baffle.
This concern is addressed in greater detail in Sec. 4.9.
0°
30°
60°
90°
120°
150°
180°-9 -6 -3 0 [dB]
Theoretical BMX direcitivity, f = 9 kHz
Unbaffled
Baffled
Figure 4.27: Theoretical directivity of the baffled BMX source at 9 kHz.
4.8 Source Budget
Once all the parameters of the source budget have been obtained, in-
cluding source TVR, hydrophone RVS, and hydrophone noise floor level, NF,
the source budget can be completed. Reiterating from Ch. 2, the signal excess,
135

or dynamic range, given by the source budget is
SE = SL + RVS− NF, (4.30)
where the source level, SL, is given by
SL = TVR− 20log10 (r) + 20log10Vgain,src. (4.31)
To evaluate the maximum expected source level, TVR is evaluated at
the resonance of the BMX source, yielding a value of 121 dB re 1 µPa/V 1 m.
Furthermore, the distance between source and receiver is chosen to be 40 cm,
the average distance between the in-situ emitting surface and the recording
surface. Assuming the voltage amplifier is capable of providing a gain of
140 Vpp, the maximum expected source level is 172 dB re 1 µPa. Using the
measured hydrophone RVS of -207 dB re 1 V/µPa, the maximum expected
unamplified voltage output from the hydrophone is on the order of 18 mV.
With a hydrophone self-noise floor of 9 µV, or -100 dB re 1 V, the transducer
system will theoretically provide a maximum signal excess of 65 dB. The source
budget parameters are tabulated in Table 4.1.
It is important to recall that, in practice, other contributors of noise
will significantly reduce the expected signal excess of the system. These forms
of noise include electrical noise from the preamplification and recording elec-
tronics, electrical interference, and acoustical noise from the laboratory. Noise
can be mitigated by properly shielding and grounding electrical components,
and by using high quality amplifiers.
136

Table 4.1: Source budget parameters of the WaveLab transducer system.
Parameter ValueTVR 121 dB re 1 µPa/V @ 1 mRVS -207 dB re 1 V/muPaNF -100 dB re 1 VSL (140 Vpp, r = 40 cm) 172 dB re 1 µPaSE 65 dB
4.9 Deviations from rigid boundaries on the emittingsurface
The WaveLab theory prescribes monopole source behavior that depends
on a rigid boundary at the emitting surface [2], however, in practice a com-
pletely rigid boundary condition is impossible to achieve due to the elastic
nature of the tank wall medium. This places an importance on decoupling
the sources from the walls that make up the emitting surface. To study the
expected magnitude of acoustic coupling into the walls, a test was conducted
involving three source prototypes mounted on an aluminum plate, a small scale
representation of the in-situ emitting surface configuration.
Three identical BMX prototypes were mounted to a 14
in. thick, 2 ft ×
2 ft aluminum plate, with a 18
in. thick corprene gasket sandwiched between
each housing flange and the aluminum plate. Corprene, a type of rubber-
impregnated cork, was chosen as the decoupling mechanism due to its well-
regarded use as an acoustic isolation material. The decoupling mechanism is
illustrated in Fig. 4.28, showing the backside of the transducers mounted to the
aluminum plate. The sources were mounted so that the face of each urethane
137
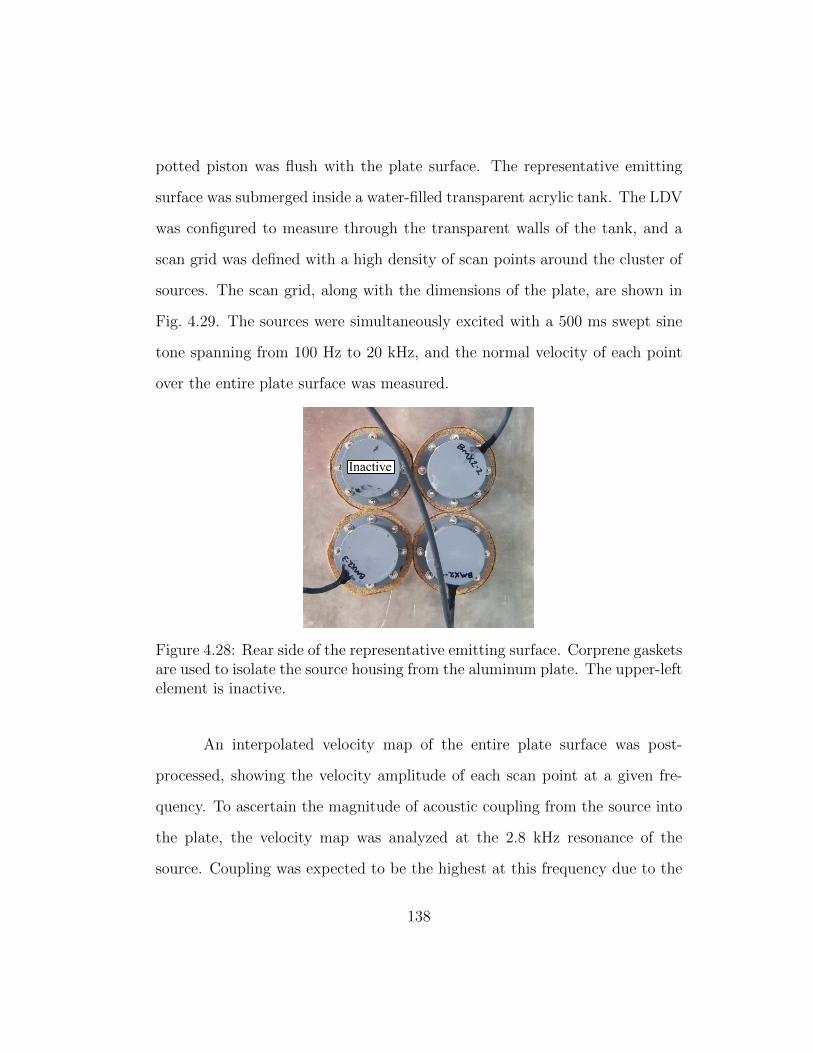
potted piston was flush with the plate surface. The representative emitting
surface was submerged inside a water-filled transparent acrylic tank. The LDV
was configured to measure through the transparent walls of the tank, and a
scan grid was defined with a high density of scan points around the cluster of
sources. The scan grid, along with the dimensions of the plate, are shown in
Fig. 4.29. The sources were simultaneously excited with a 500 ms swept sine
tone spanning from 100 Hz to 20 kHz, and the normal velocity of each point
over the entire plate surface was measured.
Inactive
Figure 4.28: Rear side of the representative emitting surface. Corprene gasketsare used to isolate the source housing from the aluminum plate. The upper-leftelement is inactive.
An interpolated velocity map of the entire plate surface was post-
processed, showing the velocity amplitude of each scan point at a given fre-
quency. To ascertain the magnitude of acoustic coupling from the source into
the plate, the velocity map was analyzed at the 2.8 kHz resonance of the
source. Coupling was expected to be the highest at this frequency due to the
138

24 in14 i
n
BMX-3 BMX-2
BMX-1Inactive
Figure 4.29: LDV scan points and dimensions of the representative emittingsurface.
maximum velocity of the source. Figure 4.30 shows the plate velocity map,
where bright spots of high velocity indicate the locations of the three sources
on the plate. At the resonance frequency of the source, the magnitude of the
velocity on the face of each source is 30 dB higher than any point on the plate,
indicating a small amount of coupling from the sources to the plate.
While the coupling into the plate was significantly lower than the mag-
nitude of the velocity of the sources, the coupling indicated that the plate
deviated from a true rigid boundary. To further reduce coupling into the
plate, more work would need to be done to study different gasket materials,
mounting methods, and plate material and thickness. A heavier plate, or a
139

-80 -70 -60 -50 -40
dB re 1 m/s / V
Velocity magnitude of representative emitting surface, f = 2.8 kHz
Figure 4.30: Measured velocity magnitude of the representative emitting sur-face at the resonance frequency of the source.
plate made from a lossy material, would be more resistant to energy transfer
from the source, and should behave more appropriately as a rigid boundary.
4.10 Whitening of the source transfer function
To physically implement the IBCs, the WaveLab theory requires com-
plete removal of the impulse response of all hardware components involved
in the measurement, including sensors and sources [2]. Whitening is defined
as the process by which the frequency response of transducer is made to be
nearly flat in the frequency band of interest. To whiten the impulse response
of the BMX source, an nth order matched filter is used to estimate the inverse
140

source transfer function, and the wavelet one wishes to inject is convolved
with the filter. While a higher number of filter coefficients corresponds to a
more accurate estimation of the inverse transfer function, the maximum num-
ber of coefficients is limited by the latency of the system. For this reason,
the source must be able to reproduce the wavelet as accurately as possible,
i.e., the source transfer function should be as flat as possible. If the source
transfer function has a wide variance across the frequency band, the system-
implemented matched filter will not accurately be able to estimate the inverse
transfer function.
To validate the suitability of the matched filter with the BMX proto-
type, an experiment was conducted with a single plate-mounted source sub-
merged in a transparent water-filled tank. The source was driven with a Ricker
wavelet with a center frequency ranging from 1 to 9 kHz and an amplitude
of 50 Vpp. The entire face of the submerged source was scanned with the
LDV, and the average piston velocity magnitude and phase was recorded. A
matched filter with 103 coefficients at sampling rate of 256 kHz was used to
estimate the inverse transfer function, given the source input wavelet and the
measured output, leading to a total time lag of 0.2 ms. The original input
wavelet was convolved with the filter, and the new impulse-corrected wavelet
was excited through the source and remeasured.
In Fig. 4.31, the input 3 kHz Ricker wavelet is compared to the uncor-
rected and the corrected measured output. In the time domain, the measured
uncorrected wavelet is characterized by several ringing oscillations after the ini-
141

tial pulse, reflecting the underdamped nature of the source. In the frequency
domain, the majority of the spectral energy is centered around the resonance
frequency of the source at 2.75 kHz as opposed to the 3 kHz center frequency
of the input wavelet. Furthermore, notches in the spectrum align with the
measured TVR. After the offline filter convolution, the corrected wavelet is
characterized by a major decrease in ringing, and a more uniform distribution
of spectral energy in line with the input wavelet.
7 8 9 10 11 12
t, [ms]
-1
-0.5
0
0.5
1
Vel
oci
ty (
no
rmal
ized
)
LDV measurement of 3 kHz Ricker wavelet
0 2 4 6 8 10
Frequency, [kHz]
0
0.5
1
Am
pli
tud
e
Input
Uncorrected output
Corrected output
Figure 4.31: Demonstration of the matched filter used to remove the sourcetransfer function from a 3 kHz Ricker wavelet.
142
The results encouragingly indicate the source transfer function, marked
by excessive ringing oscillations and uneven spectrum, can be corrected to a
relatively high degree by a matched filter that falls within the system latency
limits. The matched filter struggles to correct wavelets with center frequencies
lower than the resonance frequency of the source, because the source has a low
sound power output in this region.
4.11 Summary
In summary, this chapter has presented the design of an acoustic pro-
jector with
1. a bandwidth of 12 kHz,
2. a resonance frequency of 2.75 kHz with a transmit response of 120 dB
re 1 µPa/V at 1 m,
3. horizontal omnidirectionality up to 9 kHz kHz,
4. a low amount of acoustic coupling into the representative emitting sur-
face,
5. and a compact size.
Throughout the design process, critical performance characteristics such
as TVR, piston velocity, and directivity were modeled with the finite element
method to validate experimental measurements. In Sec. 4.4, an X-spring de-
sign tool was presented to allow one to tune the X-spring resonance given
143

certain dimensions. In combination with FEM, this tool allows for rapid de-
velopment of a BMX transducer with a desired resonance frequency. For future
work, a comprehensive equivalent circuit should be developed to better under-
stand the interaction between the bender-mode drive stack and the X-spring,
as well as to account for the effects of radiation impedance and stiffness asso-
ciated with the housing and potting.
From experimental measurements, it was observed that the housing
and potting negatively impacted the performance of the source by introducing
parasitic resonances and raising the resonance frequency. While the housing
and potting are necessary to protect the electrical components of the source
against water, future revisions of the design should consider an alternative
approach to the housing. Namely, a superior design would identify a means of
waterproofing the transducer without clamping the piston head to the housing
body, as was suspected to be the case for the current prototype. Nonetheless,
preliminary results have shown that the transfer function of the source, which is
dominated by its low frequency resonance, can be effectively removed through
the use of a matching filter. The experimental results, along with the finite
element analysis, objectively demonstrate that the BMX source satisfies the
performance requirements of the WaveLab system. Photos and drawings that
pertain to the BMX fabrication process are shown in Appendix B.
144

Chapter 5
Conclusion and Future Work
In conclusion, this thesis has presented the design of a source and a
hydrophone suitable for use in the WaveLab system. Experimental measure-
ments and models have shown that the source and hydrophone designs meet
the performance criteria prescribed by the WaveLab theory. Aside from the
WaveLab theory, the transducer designs have considered mechanical robust-
ness, production cost, manufacturability, and physical size constraints. A suite
of transducer design tools have been developed to allow for rapid development
of future designs. Collectively, a source budget has been presented in to esti-
mate the dynamic range and expected signal excess of the entire transducer
system, and preliminary experiments have demonstrated the in-situ use of the
transducers. As of spring 2019, the transducer fabrication process has been
developed, streamlined, and executed by the engineering and technical staff
at the Applied Research Laboratories, aiming for a complete delivery of 800
BMX sources and 800 hydrophones by mid 2019. Photographs of a panel of
the in-situ emitting surface are shown in Fig. 5.1 and Fig. 5.2.
While the transducer designs ultimately satisfy the WaveLab perfor-
mance requirements, certain characteristics of the source and hydrophone
145

Figure 5.1: Front side of a panel of the in-situ emitting surface. Photographcourtesy of Nele Borsing.
Figure 5.2: Back side of a panel of the in-situ emitting surface. Photographcourtesy of Nele Borsing.
146

could be improved for future revisions. In Ch. 3, it was shown that the hy-
drophone performance was negatively impacted by the excessive mass of the
Stycast overmold, which effectively limited the receive bandwidth and nar-
rowed the directivity. Future designs should consider the use of a thinner
layer of overmold material, or a less dense material in general. Furthermore,
the hydrophone equivalent circuit model suggests that sensitivity and noise
floor could be significantly improved by using a cylindrical sensing element
with a shorter length, thicker walls, and a larger outer radius. Lastly, it should
be noted that no additional consideration was given to the type of piezoce-
ramic that was used in the hydrophone prototype in the interest of time and
cost. A more desirable response could be achieved by using PZT-5H ceramic
instead of PZT-4, given the higher dielectric constant and coupling factor of
PZT-5 [4].
Throughout the BMX source fabrication process, it became quickly ap-
parent that the housing mechanism was the largest weakness of the transducer.
Namely, in some prototypes a slight excess of RTV silicone and urethane, used
for sealing and waterproofing the piston head, tended to clamp the piston and
couple the piston motion to the PVC housing. This resulted in a significantly
increase resonance frequency, and a parasitic resonance induced by flexural
motion of the PVC housing. This problem was mitigated by using a mini-
mal amount of sealing material, however, future designs should reconsider the
sealing mechanism entirely. In addition to future work on the BMX source, a
complete equivalent circuit should be developed following the dynamic model
147

of the bender bar attached to an elastic support presented by Woollett [18].
The equivalent circuit will allow for a better understanding of the interaction
between the bender-mode drive stack and the X-spring, and in combination
with the direct stiffness X-spring design tool, will allow for accurate, rapid
development of the BMX source.
148

Appendices
149

Appendix A
Hydrophone Fabrication
The following steps describe the fabrication process used to develop the
hydrophone prototype described in Ch. 3.
1. To promote adhesion with the stycast, a sodium-based etchant is applied
to the ends of the Teflon-jacketed hydrophone cable. The cable turns
black as a result of the etching compound.
2. The cable leads are soldered to the inner and outer electroded walls of
the piezoelectric cylinder.
3. End-caps machined from Macor are glued to the piezoelectric cylinder
with a non-sag epoxy.
4. To ensure alignment of the cylinder inside the mold, the cylinder is par-
tially overmolded with a proprietary mix of Henkel Loctite Stycast 2651.
5. The remaining half of the cylinder is overmolded, resulting in a large
amount of flashing from the mold inlet.
6. The flashing is removed, and the hydrophone is complete.
150

Figure A.1: Several cut-to-length hydrophone cables with etching compoundapplied to the tips.
151

Figure A.2: Attaching cable leads to the piezoelectric cylinder.
152

Figure A.3: Gluing end-caps to the cylinder.
153

Figure A.4: Partial Stycast overmold on the piezoelectric cylinder.
154

Figure A.5: Full Stycast overmold on the piezoelectric cylinder.
155

Figure A.6: Completed hydrophone with removed flashing.
156

Appendix B
BMX Source Fabrication
The following steps describe the fabrication process used to develop the
BMX prototype described in Ch. 4.
1. Loctite is applied to three machine screws, and the piston and X-spring
are fastened together.
2. The piezoelectric plates and copper electrode plate are glued together
with a conductive silver epoxy.
3. Leads are soldered to the drive stack. The drive stack is fitted into the
X-spring and glued in place with a small amount non-sag epoxy around
the outer edges.
4. The leads of the drive stack are spliced to a longer neoprene cable, and
the assembly is fitted inside the flanged PVC housing.
5. A silicone O-ring is used to offset the piston head from the PVC housing.
A small amount of pressure is applied to the piston head to crush the
O-ring, and a thin bead of RTV silicone is traced around the edge of the
piston head. The purpose of the RTV is the seal the gap between the
157

piston head and the PVC housing, preventing any urethane leaks into
the housing cavity.
6. An adhesion promoter is applied to the inner lip of the PVC housing and
the aluminum piston head, and a proprietary mix of black urethane is
poured in a uniform layer on top of the piston. The urethane is cured in
an oven for 24 hours, and allowed to cool. The source is now complete.
Figure B.1: The X-spring and Piston fastened together with machine screws.
158

Figure B.2: Assembled bender drive stacks, each consisting of a copper elec-trode plate sandwiched between two piezoelectric plates.
159

Figure B.3: Drive stacks fitted into X-springs, with a small amount of epoxyaround the edges to keep the drive stack in place.
160

Figure B.4: Preparing the BMX transducer to be sealed inside the PVC hous-ing.
161

Figure B.5: An O-ring is used to offset the piston from the PVC housing.
162

Figure B.6: The potted BMX transducer.
163

Appendix C
APC Piezoceramic Material Properties
The following table describes the material properties of APC 840 and
APC 850, which are piezoceramics proprietary to APC International [3]. These
material properties have been used in hydrophone equivalent circuit outlined
in Sec. 3.3.
164

Table C.1: APC Piezoceramic Material Properties [3].
APC Material: 840 850Equivalent Ceramic PZT-4 PZT-5ARelative Dielectric ConstantKT 1275 1375Dielectric Dissipation Factortanδ .006 ≤.020Electromechanical Coupling Factorkp 0.59 0.63k33 0.72 0.72k31 0.35 0.36k15 0.70 0.68Piezoelectric Charge Constant [10−12 C/N or 10−12 m/V]d33 290 400−d31 125 175−d15 480 590Young’s Modulus [GPa]YE
11 80 63YE
33 68 54Density [kg/m3]ρ 7600 7600
165

Appendix D
MATLAB Code for an Equivalent Circuit
Model of a Hydrophone with an End-Capped
Cylindrical Sensing Element
The following MATLAB code was used to calculate the equivalent cir-
cuit model parameters described in Sec.3.3, adapted from Sherman and Butler
[4] and Joseph [12].
% Equivalent circuit model of a hydrophone with an end-capped cylindrical
% sensing element. Adapted from "Transducers
% and Arrays for Underwater Sound" by C. H. Sherman and J. L. Butler, and
% "A Comparison of Models for a Piezoelectric 31-Mode Segmented Cylindrical
% Transducer" by N.J. Joseph.
%
% Inputs:
% Geometry
% a - inside radius of piezo cylinder, [m]
% b - outside radius of piezo cylinder, [m]
% l - length of individual cylinder, [m]
% n - number of cylinders wired in parallel
166

% t - wall thickness, [m]
% cap_t - end-cap thickness, [m]
% da - inside radius machining tolerance, [m]
% db - outside diameter machining tolerance, [m]
% P0 - incident pressure, [Pa]
% Material properties
% tand - measured average dielectric loss tangent, []
% K33T - free, relative dielectric constant, []
% g33 - 33 piezo voltage constant, [Vm/N]
% g31 - 31 piezo voltage constant, [Vm/N]
% d31 - 31 piezo charge constant, [C/N]
% Y11E - 11 Young’s modulus at constant electric field, [N/m^2
% s11E - 11 elastic compliance -"-, [m^2/N]
% s12E - 12 elastic compliance -"-, [m^2/N]
% k31 - 31 electromechanical coupling factor
% rho - ceramic density, [kg/m^3]
% end cap properties
% Rhocap - density of end cap, [kg/m^3]
% Ycap - Young’s modulus of end cap material, [Pa]
% Nu_cap - poisson’s ratio of end cap material, []
% Mstycast - total mass of potting material, [kg]
%
% Outputs:
167

% Z - complex electrical input impedance
% Ms - receive voltage sensitivity, [dB re 1 V/uPa]
% Mk - receive sensitivity corrected for long cables, [dB re 1 V/uPa]
% Pn_dB - equivalent noise pressure level, [dB re 1 uPa^2/Hz]
% EW Fall 2018
clc
clear
close all
j = 1i;
% Initialize Parameters
% define hydrophone geometry
% for large cylinder:
% a = (15.75/2)*1e-3; % inside radius of piezo cylinder, [m]
% b = (19/2)*1e-3; % outside radius of piezo cylinder, [m]
% l = (5.6)*1e-3; % length of individual cylinder, [m]
% for small cylinder:
168

a = 4e-3; % inside radius of piezo cylinder, [m]
b = 5e-3; % outside radius of piezo cylinder, [m]
l = 10e-3; % length of individual cylinder, [m]
n = 1; % number of cylinders wired in parallel
t = b-a; % wall thickness, [m]
D = 2*b; % hydrophone diameter, [m]
alpha = a/b;
am = (a+b)/2; % mean radius, [m]
cap_t = 1.5e-3; % end-cap thickness, [m]
L = n*l; % length of hydrohone assembly (without end caps), [m]
Ac = 2*pi*am*t; % area of cylinder face, [m]
da = .25e-3/2; % inside radius machining tolerance, [m]
db = 0.38e-3/2; % outside diameter machining tolerance, [m]
P0 = 1; % incident pressure, [Pa]
% define piezoelectric constants for material APC840
e0 = 8.85e-12; % permittivity of free space, [F/m]
tand = .009; % measured average dielectric loss tangent, []
K33T = 1175; % free, relative dielectric constant, []
g33 = 26.5e-3; % 33 piezo voltage constant, [Vm/N]
169

g31 = -11e-3; % 31 piezo voltage constant, [Vm/N]
d31 = -125e-12; % 31 piezo charge constant, [C/N]
Y11E = 8e10; % 11 Young’s modulus at constant electric field, [N/m^2
s11E = 1/Y11E; % 11 elastic compliance -"-, [m^2/N]
s12E = -4.05e-12; % 12 elastic compliance -"-, [m^2/N]
k31 = 0.35; % 31 electromechanical coupling factor
rho = 7600; % ceramic density, [kg/m^3]
% calculate misc. values
% 11 elastic compliance at constant charge density, [m^2/N]
s11D = s11E - ((d31^2)/(e0*K33T));
% effective elastic compliance, [m^2/N]
Sb = (4*e0*K33T*s11D*s11E)/(4*e0*K33T*s11E-3*d31^2);
v12E = -s12E/s11E; % 12 Poisson’s ratio
C1 = 2*pi*e0*K33T*l/log(b/a); % free capacitance of one element
% C1 = 2.93e-9; % measured capacitance of one cylinder, [F]
Cf = C1 * n; % free capacitance of N cylinders wired in parallel, [F]
dg33 = .2*g33; % +/- 20% g33 tolerance
dg31 = .2*g31; % +/- 20% g31 tolerance
% Free-field voltage sensitivity of a radially-poled end-capped cylinder
% (from Langevin derivation for comparison purposes)
170
% sensitivity of cylinder, [V/Pa]
Vl = (-b/(1+alpha))*((1-alpha)*g33+(2+alpha)*g31);
% calculate error in free-field sensitivity
dV = (((b^2)*((1-alpha)^2)*(dg33^2)/((1+alpha)^2))...
+ ((b^2)*((2+alpha)^2)*(dg31^2)/((1+alpha)^2))...
+ ((da^2)*((2*g33+g31)^2)/((1+alpha)^4))...
+ (((((1+2*alpha-(alpha^2))*g33+(2+4*alpha+(alpha^2))*g31)^2)...
/((1+alpha)^4))*(db^2)))^(1/2);
% Langevin free-field sensitivity, [dB re 1 V/uPa]
M_lang = 20*log10(Vl*1e-6);
% error in free-field sensitivity, [dB]
dM_lang = 20*log10(exp(1))*(Vl^-1)*dV;
% Equivalent circuit impedance
% define frequency vector
f = linspace(100,250e3, 2e3);
w = 2*pi.*f;
% end cap properties
171

Rhocap = 2520; % density of macor cap [kg/m^3]
Ycap = 66.9e9; % Young’s modulus of macor [Pa]
Ccap = 1/Ycap;
Nu_cap = .29; % macor poisson’s ratio
% calculate masses
Mcap = 2*pi*(b^2)*(1.5e-3)*Rhocap; % mass of macor cap, [kg]
Mstycast = .0066; % measured Stycast mass
M = (rho*2*pi*am*t*L) + Mcap + Mstycast; % mass of piezo element, [kg]
% calculate radiation impedance (approximated by sphere)
as = sqrt(b*L/2);
A = 4*pi*as^2; % radiating area of equivalent sphere, [m]
rho0 = 1000; % water density, [kg/m^3]
c0 = 1481; % water sound speed, [m/s]
k = w./c0; % wavenumber
ka = k.*as; % k-a parameter
% approximate radiation impedance of equivalent sphere
Zr = .5*A*rho0*c0*((ka.^2)+j.*ka)/(1+ka.^2);
% Radial mode parameters
N_r = 2*pi*L*d31/s11E; % transformer turns ratio
CE_r = s11E*am/(2*pi*t*L); % effective radial compliance
172

CE_r_eff = CE_r + Ccap;
e33S = e0*K33T*(1-k31^2);
C0 = (2*pi*am*L/t)*e33S; % clamped radial capacitance
% Axial mode parameters
C11 = 139e9;
C13 = 74.28e9;
C33 = 115e9;
nu13 = -C13/C33;
e33 = 15.1;
K33S=635;
e33s = K33S*e0;
Ceff = C11 - ((C13^2)/C33); % effective stiffness
KE_l = pi^2*Ac*Ceff/L;
k_pl = -e33*nu13/sqrt((C11+C13*nu13)*e33s);
CE_l = 1/KE_l;
C0_l = e33S*2*pi*am*L/t;
N_l = sqrt(((k_pl^2)*C0)/(CE_l*(1-k_pl^2)));
Reff = 10; % effective mechanical resistance
G0 = w.*Cf*tand; % electric loss conductancce
R0 = 1./G0; % electric loss resistance
173

% radial mechanical impedance
Zmech_r = (N_r^2)./(Reff + j.*w*M + (1./(j.*w*CE_r)) + Zr);
% axial mechanical impedance
Zmech_l = (N_l^2)./(Reff + j.*w*M + (1./(j.*w*CE_l)) + Zr);
% total mechanical impedance
Zt = Zmech_r + Zmech_l;
% electrical impedance
Z0 = 1./(G0 + j.*w*C0);
Z = 1./(G0 + j.*w*C0 + Zt); % circuit input impedance
phase = rad2deg(angle(Z));
% sensitivity
% diffraction coefficient of infinite cylinder
Da = (2./(pi*k*b)).*((besselj(1, k.*b).^2)+(bessely(1,k.*b).^2)).^(-1/2);
Fb = 2.*Da*pi*b*L; % force incident on hydrophone
Fr = Fb./N_r;
Fl = Fb./N_l;
Ft = Fr + Fl;
174

V = Z0.*(Ft)./(Z0 + 1./Zt); % voltage output [V]
Ms = 20*log10(abs(V)*1e-6); % sensitivity, [dB re 1 V/uPa]
% Sensitivity correction
% correct sensitivity for parasitic capacitances associated with cables and
% hook-up wires
cable_length = 4.5; % [m] of PCB 003 low-noise coax cable
Ck = 90e-12 * cable_length; % cable capacitance, [F]
Vk = (Cf/(Cf+Ck)) * V; % reduced sensitivity at end of cable, [V/Pa]
Mk = 20*log10(abs(Vk)*1e-6); % corrected sensitivity, [dB re 1 V/uPa]
figure
semilogx(f(1:10:end)/1e3, Mk(1:10:end)-2)
xlabel(’Frequency, [kHz]’)
ylabel(’ RVS [dB re 1 V/\muPa]’)
title(’Equivalent Circuit RVS corrected’)
grid on
set(gca, ’FontSize’, 14)
% hydrophone noise (with cable)
175

K = 1.381e-23; % Boltzman’s constant [J/K]
T = 294; % water temperature [K]
df = 1; % frequency bin [Hz]
Rh = real(Z); % equivalent electrical resistance
Vj = sqrt(4*K*T*Rh*df); % RMS Johnson noise voltage
Pn_dB = -198 + 10*log10(Rh) - Ms; % equivalent noise pressure level
figure
semilogx(f/1e3, Pn_dB, ’LineWidth’, 2)
title(’Modeled thermal noise’)
xlabel(’Frequency, [kHz]’)
ylabel(’Spectrum pressure level dB re (1 \muPa^2)/Hz’)
grid on
set(gca, ’FontSize’, 14)
176

Appendix E
MATLAB Code for a Direct Stiffness-Based
X-Spring Design Tool
The following MATLAB code was used to implement the direct stiffness
method to estimate X-spring resonance based on a given spring geometry,
following Gattas and Albermani [20].
% Direct stiffness method for estimation of X-spring resonance based on
% spring geometry.
% Based on CIVL3340 L7 lecture notes from J. Gattas and F. Albermani, the
% University of Queensland, Australia and CE 381R lecture notes from L.
% Kallivokas, the University of Texas at Austin
%
% Inputs:
% a - lever arm Y component [m]
% b - lever arm X component (such that the slope of the arm is a/b) [m]
% t - lever arm thickness [m]
% E - Young’s modulus of spring material [Pa]
% rho - density of spring material [kg/m^3]
%
177

% Outputs:
% fr - structural resonance frequency [Hz]
%
% EW Spring 2019
clc
clear
close all
% model inputs
a = .0013; % lever arm Y component [m]
b = .011; % lever arm X component [m]
t = 1e-3; % spring thickness [m]
E = 70E9; % Young’s modulus [Pa]
rho = 2700; % density [kg/m^3]
% initialize parameters
N = 2; % specify number of elements
alpha = [pi/2,atan(a/b)]; % element inclination angle
% populate stiffness matrix and force vector
178

% global stiffness matrix will be of size 9 x 9 (three DOF at each node)
K = zeros(3*(N+1),3*(N+1));
M = zeros(3*(N+1),3*(N+1));
F = zeros(3*(N+1),1);
% beam properties
L = [sqrt(a^2+b^2)/2,sqrt(a^2+b^2)]; % length of element 1, element 2
I = (2*b*t^3)/12; % moment of interia
A = t*2*b; % beam cross-sectional area
for n = 1:N
index = (3*n-2):(3*n+3);
c = cos(alpha(n));
s = sin(alpha(n));
% assemble element stiffness matrix
% inclination component
L_B = [c s 0;-s c 0;0 0 1];
% global shape function
L_D = [L_B,zeros(size(L_B));zeros(size(L_B)),L_B];
% local transformation
179

T = [0 1/L(n) 1 0 -1/L(n) 0;0 1/L(n) 0 0 -1/L(n) 1;-1 0 0 1 0 0];
% local stiffness
k_s = [4*E*I/L(n) 2*E*I/L(n) 0;2*E*I/L(n) 4*E*I/L(n) 0;0 0 A*E/L(n)];
% basic member stiffness
k_p = T’*k_s*T;
% element stiffness matrix
Ke = L_D’*k_p*L_D;
% assemble element mass matrix
Mea = [140 0 0; 0 156 22*L(n); 0 22*L(n) 4*L(n)^2];
Meb = [70 0 0;0 54 -13*L(n);0 13*L(n) -3*L(n)^2];
Mec = [70 0 0;0 54 13*L(n);0 -13*L(n) -3*L(n)^2];
Med = [140 0 0; 0 156 -22*L(n); 0 -22*L(n) 4*L(n)^2];
me = (rho*A*L(n)/420)*[Mea Meb; Mec Med];
Me = L_D’*me*L_D; % basic element mass matrix
% assemble global matrices
K(index, index) = K(index, index) + Ke;
M(index, index) = M(index, index) + Me;
end
% enforce BCs based on boundary condition
180

% Reduced stiffness and mass matrix for free-fixed condition
Kr = K(1:6, 1:6);
Mr = M(1:6, 1:6);
Fr = [0;0;0;0;0;-1];
% compute eigenfrequencies
[V,D] = eig(Kr,Mr);
% pick lowest eigenfrequency
omega = sqrt(min(D(D>0)));
fr = omega/(2*pi);
disp(’a=’), disp(a)
disp(’b=’), disp(b)
disp(’Estimated resonance frequency [Hz]:’)
disp(fr)
% calculate nodal displacements
r = zeros(9,1);
r(1:6) = Kr\Fr;
% plot
% Adapted from A. Prakash, Class Lecture, Topic: "Structural Analysis II."
% CE47400, School of Civil Engineering, Purdue University, Indiana, Spring
181

% 2014.
% Nodes
nodes = [0,0;0,L(1);b,L(1)+a];
% Elements
elems = [1 2; 2 3];
Ne1 = size(elems,1);
Nnodes = size(nodes,1);
figure,
plot(nodes(:,1),nodes(:,2),’k.’)
hold on, axis equal;
for ie1 = 1 : Ne1
elnodes = elems(ie1, 1:2);
nodexy = nodes(elnodes, :);
plot(nodexy(:,1), nodexy(:,2),’k--’)
end
% plot new mode shape
182

Magnification = 2; % set scale of deformation
ndivs = 20;
xydisp = [r(1:3:end) r(2:3:end)];
nodesnew = nodes + Magnification*xydisp;
plot(nodesnew(:,1),nodesnew(:,2),’O’,’MarkerEdgeColor’,’k’, ...
’MarkerFaceColor’,’r’,’MarkerSize’,10)
hold on; axis equal;
for ie1 = 1:Ne1
elnodes = elems(ie1, 1:2);
E1 = [ (nodes(elnodes(2),1)-nodes(elnodes(1),1))...
(nodes(elnodes(2),2)-nodes(elnodes(1),2))];
le = norm(E1);
E1 = E1/le;
E2 = [-E1(2) E1(1)];
eldofs = 3*(elnodes(1)-1)+1:3*elnodes(1);
eldofs = [eldofs 3*(elnodes(2)-1)+1:3*elnodes(2)];
eldisp = r(eldofs);
Qrot = [E1;E2];
Qrot(3,3)=1;
183

Tmatrix = [Qrot zeros(3); zeros(3) Qrot];
eldispLOC = Tmatrix*eldisp;
for jj = 1:ndivs+1
xi = (jj-1)/ndivs;
xdispLOC = eldispLOC(1)*(1-xi)+eldispLOC(4)*xi;
ydispLOC = eldispLOC(2)*(1-3*xi^2+2*xi^3)+eldispLOC(5)*...
(3*xi^2-2*xi^3) + eldispLOC(3)*le*(xi-2*xi^2+xi^3) +...
eldispLOC(6)*le*(-xi^2+xi^3);
xydisp = (Qrot([1,2],[1,2]))’*[xdispLOC;ydispLOC];
plotpts(jj,1) = nodes(elnodes(1),1) + xi*le*E1(1) +...
Magnification*xydisp(1);
plotpts(jj,2) = nodes(elnodes(1),2) + xi*le*E1(2) +...
Magnification*xydisp(2);
end
plot(plotpts(:,1),plotpts(:,2),’k.-’,’LineWidth’,2)
end
184

Bibliography
[1] M. Vasmel, J. O. A. Robertsson, D.-J. van Manen, and A. Curtis, “Im-
mersive experimentation in a wave propagation laboratory,” The Journal
of the Acoustical Society of America, vol. 134, no. 6, pp. EL492–EL498,
2013.
[2] T. S. Becker, D.-j. V. Manen, C. M. Donahue, C. Barlocher,
N. Borsing, F. Broggini, T. Haag, J. O. A. Robertsson, D. R. Schmidt,
S. A. Greenhalgh, and T. E. Blum, “Immersive Wave Propagation
Experimentation: Physical Implementation and One-Dimensional
Acoustic Results,” Physical Review X, vol. 8, no. 3, p. 31011, 2018.
[Online]. Available: https://doi.org/10.1103/PhysRevX.8.031011
[3] Piezoelectric Ceramics: Principles and Applications. Mackeyville, PA:
APC International, 2011.
[4] C. H. Sherman and J. L. Butler, Transducers and Arrays for Underwater
Sound. Springer Science+Business Media, 2007.
[5] APC International Ltd, “Determining Resonance Frequency,” Tech.
Rep., 2014. [Online]. Available: https://www.americanpiezo.com/
[6] A. L. Bonomo and M. J. Isakson, “Modeling the Acoustic Scattering from
Axially Symmetric Fluid , Elastic, and Poroelastic Objects due to Non-
185

symmetric Forcing Using COMSOL Multiphysics,” in COMSOL Conf. in
Boston, (2016)., 2016.
[7] M. Pollack, Principles of Marine Bioacoustics, 2010.
[8] T. Xu and L. Xu, Eds., Digital Underwater Acoustic Communications.
Academic Press, 2017.
[9] Bruel & Kjær, “Product Data Sheet: Hydrophones – Types 8103,
8104, 8105 and 8106 (BP0317-19),” Nærum, Denmark, 2018. [Online].
Available: http://www.lthe.fr/IGE/IMG/pdf/DocBruelKjaerHydro.pdf
[10] D. T. Blackstock, Fundamentals of Physical Acoustics. John Wiley &
Sons, Inc., 2000.
[11] A. C. Tims, “A New Capped-Cylinder Design for an Underwater Sound
Transducer (USRD Type F50),” The Journal of the Acoustical Society of
America, vol. 51, no. 5B, pp. 1751–1758, 1972.
[12] N. J. Joseph, “A Comparison of Models for a Piezoelectric 31-Mode Seg-
mented Cylindrical Transducer,” Master’s thesis, The University of Texas
at Austin, 2013.
[13] O. B. Wilson, An introduction to the theory and design of sonar trans-
ducers. Washington, D.C.: Naval Sea Systems Command, 1985.
[14] R. A. Langevin, “The Electro-Acoustic Sensitivity of Cylindrical Ceramic
Tubes,” The Journal of the Acoustical Society of America, vol. 26, no. 3,
pp. 421–427, 1954.
186

[15] COMSOL Multiphysics v. 5. 4, “Plane Wave Scattering off a 2D Axisym-
metric Object: Plane Wave Expansion Approach,” Stockholm, Sweden,
2018.
[16] J. J. Faran, “Sound scattering by solid cylinders and spheres,” The Jour-
nal of the Acoustical Society of America, vol. 23, no. 4, pp. 405–418,
1951.
[17] K. K. Nguyen, “Design and Comparison of Single Crystal and Ceramic
Tonpilz Transducers,” Master’s thesis, The University of Texas at Austin,
2010.
[18] R. S. Woollett, The Flexural Bar Transducer. Newport, RI: Naval Un-
derwater Systems Center, 1986.
[19] J. L. Butler and A. L. Butler, “Single-sided electro-mechanical transduc-
tion apparatus,” 2002, US Patent 6654316B1.
[20] J. Gattas and F. Albermani, “CIVL3340 L7: Introduction to Direct Stiff-
ness Method,” Lecture Notes, 2015.
[21] COMSOL Multiphysics v. 5. 4, “Piezoelectric Tonpilz Transducer,” Stock-
holm, Sweden, 2018.
187

Vita
Eli Willard was born in Albuquerque, NM. He attended the University of New
Mexico where he graduated Cum Laude in December 2015 with a Bachelor’s
degree in mechanical engineering. In August 2016, he began his graduate
studies at the University of Texas at Austin, studying mechanical engineering
with a focus in acoustics. Throughout the graduate program, Eli worked as
a Graduate Research Assistant under Dr. Michael Haberman at the Applied
Research Laboratories (ARL). In March 2019, he took a full-time position at
ARL, where he continues to pursue his interests in acoustics and mechanical
engineering.
Address: [email protected]
This thesis was typeset with LATEX� by the author.
�LATEX is a document preparation system developed by Leslie Lamport as a specialversion of Donald Knuth’s TEX Program.
188