Control robusto de sistemas con incertidumbres politópicas
112
PROYECTO DE GRADO Presentado ante la ilustre UNIVERSIDAD DE LOS ANDES como requisito parcial para obtener el Título de INGENIERO DE SISTEMAS CONTROL ROBUSTO DE SISTEMAS CON INCERTIDUMBRES POLITÓPICAS Por Br. Maryury Cabrera Durán Tutor: Addison Ríos Bolívar Mayo 2009 ©2009 Universidad de Los Andes Mérida, Venezuela
-
Upload
khangminh22 -
Category
Documents
-
view
4 -
download
0
Transcript of Control robusto de sistemas con incertidumbres politópicas

PROYECTO DE GRADO
Presentado ante la ilustre UNIVERSIDAD DE LOS ANDES como requisito parcial para
obtener el Título de INGENIERO DE SISTEMAS
CONTROL ROBUSTO DE SISTEMAS CON INCERTIDUMBRES POLITÓPICAS
Por
Br. Maryury Cabrera Durán
Tutor: Addison Ríos Bolívar
Mayo 2009
©2009 Universidad de Los Andes Mérida, Venezuela

Control robusto de sistemas con incertidumbres politópicas
Br. Maryury Cabrera D.
Proyecto de Grado — Sistemas de Control, 112 páginas
Resumen: Este trabajo de investigación está basado en el análisis y síntesis de sistemas de control para
procesos con incertidumbres, es decir, el diseño de sistemas de control para procesos con modelos
matemáticos que no representan con exactitud la dinámica del sistema bajo estudio. Para ello, se hará
uso de la teoría de control robusto, por ser una disciplina de la teoría de control que centra su estudio
en plantas con estas características y que admiten al menos un controlador fijo. El estudio se
fundamenta en el diseño de controladores que garanticen estabilidad y desempeño robusto de sistemas
con incertidumbres de tipo politópicas, a partir de la caracterización de la norma-2 y la norma-∞ como
desigualdades matriciales lineales.
Palabras clave: Control Robusto. Sistemas Inciertos. Incertidumbres Politópicas. Normas H2 - H∞.
LMI.
ii

A DIOS todopoderoso
y a la memoria de mis padres,
en especial a la de mi
MADRE
iii

Índice
Índice ...................................................................................................................... iv Índice de Tablas .......................................................................................................... ix Índice de figuras .......................................................................................................... x Agradecimientos ........................................................................................................ xii Capítulo 1 Introducción ............................................................................................. ii
1.1 Antecedentes ................................................................................................ 2 1.2 Planteamiento del problema .............................................................................. 5 1.3 Justificación .................................................................................................. 5 1.4 Delimitación ................................................................................................. 6 1.5 Objetivos ..................................................................................................... 6
Objetivo general ................................................................................................... 6 Objetivos específicos .............................................................................................. 6
1.6 Estructura del documento ................................................................................ 6 Capítulo 2 Fundamentos teóricos .................................................................................. 8
2.1 Normas ....................................................................................................... 8 Norma de un vector ............................................................................................... 9 Norma de una matriz ........................................................................................... 10 Norma de una señal ............................................................................................. 12 Norma de sistemas .............................................................................................. 14
2.2 Valores singulares......................................................................................... 17 Descomposición de valores singulares ....................................................................... 17 Propiedades de los valores singulares ........................................................................ 18
iv

Capítulo 3 Introducción al control robusto .................................................................... 20 3.1 Tipos de incertidumbres ................................................................................ 22
Aditiva ............................................................................................................. 22 Multiplicativa a la entrada ...................................................................................... 23 Multiplicativa a la salida ........................................................................................ 23 De realimentación de la planta ................................................................................ 23 Bucle realimentado a la entrada ............................................................................... 24 Bucle realimentado a la salida ................................................................................. 24 Politópica ......................................................................................................... 24
3.2 Transformación lineal fraccional (LFT) ............................................................... 25 3.3 Sistemas MIMO ........................................................................................... 27 3.4 Estabilidad cuadrática .................................................................................... 29
Estabilidad para funciones de transferencia ................................................................. 29 Estabilidad de sistemas dinámicos ............................................................................ 29 Criterio de estabilidad de Lyapunov ......................................................................... 29 Análisis de estabilidad para sistemas politópicos ........................................................... 30
3.5 LMI’s en la teoría del control robusto ................................................................ 30 Problemas de las LMI’s ......................................................................................... 32
3.6 Algunos problemas LMI’s con soluciones analíticas ................................................ 33 Desigualdades de Lyapunov.................................................................................... 33 El Lema Real Acotado .......................................................................................... 33
3.7 Complemento de Schur ................................................................................. 34 3.8 Norma de sistemas como LMI’s ....................................................................... 35
Norma ....................................................................................................... 36 2H
Norma ....................................................................................................... 38 ∞H
3.9 Regiones LMI´s para la ubicación de polos ........................................................... 39
Semiplano a izquierda de .................................................................................. 40 0x
Semiplano a la derecha de ................................................................................. 40 0x
Cono con vértice en cero. ..................................................................................... 40 Región circular centrada en α− y de radio r ............................................................ 41
v

Banda vertical .................................................................................... 41 21 hxh <<
Capítulo 4 Síntesis de controladores robustos H2 y H∞ como LMI’s ....................................... 43 4.1 Realimentación del vector de estados ................................................................. 43
Versión Primal ................................................................................................... 44 Versión Dual ..................................................................................................... 44
4.2 Realimentación de la salida ............................................................................. 45 Realimentación estática de la salida .......................................................................... 45
4.3 Control ............................................................................................... 47 2H
Control - Realimentación de estados ................................................................... 47 2H
Control - Realimentación estática de la salida ......................................................... 48 2H
4.4 Control ............................................................................................... 49 ∞H
Control - Realimentación de estados ................................................................... 49 ∞H
Control - Realimentación estática de la salida ........................................................ 50 ∞H
4.5 Resumen para el controlador ..................................................................... 50 2H
Para el caso realimentación del vector de estados: Kxu = ............................................. 50
Para el caso realimentación estática de la salida: Kyu = ................................................ 51
4.6 Resumen para el controlador ..................................................................... 51 ∞H
Para el caso realimentación del vector de estados: Kxu = ............................................. 51
Para el caso realimentación estática de la salida: Kyu = ................................................ 52
4.7 Ejemplo ilustrativo ....................................................................................... 52
Controlador .................................................................................................... 53 2H
Ejemplo 4.1: Controlador con 2H Kxu = ............................................................... 53
Ejemplo 4.2: Controlador con 2H Kxu = y ubicación de polos ...................................... 55
Ejemplo 4.3: Controlador con 2H Kyu = ............................................................... 56
Ejemplo 4.4: Controlador con 2H Kyu = y ubicación de polos ...................................... 57
Controlador .................................................................................................... 58 ∞H
Ejemplo 4.5: Controlador con ∞H Kxu = ............................................................... 58
Ejemplo 4.6: Controlador con ∞H Kxu = y ubicación de polos ...................................... 59
vi

Ejemplo 4.7: Controlador con ∞H Kyu = ............................................................... 61
Ejemplo 4.8: Controlador con ∞H Kyu = y ubicación de polos ...................................... 62
Capítulo 5 Diseño de controladores H2 y H∞ para una caldera ............................................. 64
5.1 Controlador ......................................................................................... 67 2H
Controlador con ................................................................................ 67 2H Kxu =
Controlador con y ubicación de polos ....................................................... 70 2H Kxu =
Controlador con ................................................................................ 73 2H Kyu =
Controlador con y ubicación de polos ....................................................... 76 2H Kyu =
5.2 Controlador ......................................................................................... 79 ∞H
Controlador con ................................................................................ 79 ∞H Kxu =
Controlador con y ubicación de polos ...................................................... 83 ∞H Kxu =
Controlador con ................................................................................ 86 ∞H Kyu =
Controlador con y ubicación de polos ...................................................... 90 ∞H Kyu =
Análisis de los resultados .......................................................................................... 93 Conclusiones ............................................................................................................ 94 Recomendaciones ...................................................................................................... 95 Bibliografía ............................................................................................................... 96 Apéndice A .............................................................................................................. 99
Capítulo 2 ............................................................................................................ 99 Ejemplo 2.5.m: Descomposición en valores singulares .................................................. 99
Capítulo 4 ............................................................................................................ 99 Ejemplo C_O_Introductorio.m: Estudio de la controlabilidad y observabilidad para el sistema
incierto ............................................................................................................ 99
Ejemplo 41.m: Controlador con 2H Kxu = ............................................................ 99
Ejemplo 42.m: Controlador con 2H Kxu = y ubicación de polos ................................... 99
Ejemplo 43.m: Controlador con 2H Kyu = ............................................................ 99
Ejemplo 44.m: Controlador con 2H Kyu = y ubicación de polos ................................... 99
Ejemplo 45.m: Controlador con ∞H Kxu = ............................................................ 99
vii

Ejemplo 46.m: Controlador con ∞H Kxu = y ubicación de polos ................................... 99
Ejemplo 47.m: Controlador con ∞H Kyu = ............................................................. 99
Ejemplo 48.m: Controlador con ∞H Kyu = y ubicación de polos ................................... 99
Capítulo 5 ............................................................................................................ 99 Ejemplo EcuacionesCaldera.m ................................................................................ 99 Ejemplo C_O_Caldera.m ..................................................................................... 99
Ejemplo51.m: Controlador con 2H Kxu = ............................................................. 99
Ejemplo52.m: Controlador con 2H Kxu = y ubicación de polos .................................... 99
Ejemplo53.m: Controlador con 2H Kyu = ............................................................ 100
Ejemplo54.m: Controlador con 2H Kyu = y ubicación de polos ................................... 100
Ejemplo55.m: Controlador con ∞H Kxu = ............................................................ 100
Ejemplo56.m: Controlador con ∞H Kxu = y ubicación de polos .................................. 100
Ejemplo57.m: Controlador con ∞H Kyu = ............................................................ 100
Ejemplo58.m: Controlador con ∞H Kyu = y ubicación de polos .................................. 100
viii

Índice de Tablas
Tabla 4.1: Resultados obtenidos para -sistema incierto- con 2H Kxu = .................................. 54
Tabla 4.2: Resultados obtenidos para -sistema incierto- con 2H Kxu = y ubicación de polos ......... 55
Tabla 4.3: Resultados obtenidos para -sistema incierto- con 2H Kyu = .................................. 56
Tabla 4.4: Resultados obtenidos para -sistema incierto- con 2H Kyu = y ubicación de polos ......... 57
Tabla 4.5: Resultados obtenidos para -sistema incierto- con ∞H Kxu = .................................. 58
Tabla 4.6: Resultados obtenidos para -sistema incierto- con ∞H Kxu = y ubicación de polos ......... 60
Tabla 4.7: Resultados obtenidos para -sistema incierto- con ∞H Kyu = .................................. 61
Tabla 4.8: Resultados obtenidos para -sistema incierto- con ∞H Kyu = y ubicación de polos ......... 63
Tabla 5.1: Resultados obtenidos para -sistema físico- con 2H Kxu = ...................................... 68
Tabla 5.2: Resultados obtenidos para -sistema físico- con 2H Kxu = y ubicación de polos ............ 71
Tabla 5.3: Resultados obtenidos para -sistema físico- con 2H Kyu = ...................................... 74
Tabla 5.4: Resultados obtenidos para -sistema físico- con 2H Kyu = y ubicación de polos ............ 77
Tabla 5.5: Resultados obtenidos para -sistema físico- con ∞H Kxu = ..................................... 80
Tabla 5.6: Resultados obtenidos para -sistema físico- con ∞H Kxu = y ubicación de polos ............ 83
Tabla 5.7: Resultados obtenidos para -sistema físico- con ∞H Kyu = ..................................... 87
Tabla 5.8: Resultados obtenidos para -sistema físico- con ∞H Kyu = y ubicación de polos ............ 90
ix

Índice de figuras
Figura 2.1: Respuesta en tiempo de 210)(t
etx−
= ............................................................... 14
Figura 3.1: Planteamiento del problema de control ............................................................. 21 Figura 3.2: Esquema general de un sistema de control robusto ................................................ 22 Figura 3.3: Incertidumbre Aditiva .................................................................................. 22 Figura 3.4: Incertidumbre Multiplicativa a la entrada ........................................................... 23 Figura 3.5: Incertidumbre multiplicativa a la salida .............................................................. 23 Figura 3.6: Incertidumbre de tipo realimentación a la planta .................................................. 23 Figura 3.7: Incertidumbre de tipo bucle realimentado a la entrada ........................................... 24 Figura 3.8: Incertidumbre de tipo bucle realimentado a la salida .............................................. 24 Figura 3.9: Diagrama LFT por debajo .............................................................................. 26 Figura 3.10: Diagrama LFT por encima ............................................................................ 26 Figura 3.11: Esquema de interconexión general de un sistema ................................................ 27 Figura 3.12: Semiplano a la izquierda de x0........................................................................ 40 Figura 3.13: Semiplano a la derecha de x0. ........................................................................ 40 Figura 3.14: Cono centrado en cero. ............................................................................... 41 Figura 3.15: Circunferencia centrada en α− y de radio r .................................................... 41
Figura 3.16: Banda vertical ........................................................................... 41 21 hxh <<
Figura 4.1: Análisis SVD para -sistema incierto- con ∞H Kxu = ........................................... 59
Figura 4.2: Análisis SVD para -sistema incierto- con ∞H Kxu = y ubicación de polos .................. 60
Figura 4.3: Análisis SVD para -sistema incierto- con ∞H Kyu = ........................................... 62
Figura 4.4: Análisis SVD para -sistema incierto- con ∞H Kyu = y ubicación de polos .................. 63
Figura 5.1: Esquema de generación de vapor ..................................................................... 64 Figura 5.2: Autovalores en lazo cerrado del sistema variando el parámetro incierto ...................... 68 Figura 5.3: Diagrama en Simulink para analizar las salidas del sistema en lazo cerrado .................... 69
x

Figura 5.4: Salidas medidas para el sistema con el controlador -2H Kxu = ............................... 69
Figura 5.5: Salidas controladas para el sistema con el controlador -2H Kxu = ........................... 70
Figura 5.6: Autovalores en lazo cerrado del sistema variando el parámetro incierto ...................... 72
Figura 5.7: Salidas medidas para el sistema con el controlador -2H Kxu = y ubicación de polos ..... 72
Figura 5.8: Salidas controladas para el sistema con el controlador -2H Kxu = y ubicación de polos . 73
Figura 5.9: Autovalores en lazo cerrado del sistema variando el parámetro incierto ...................... 75
Figura 5.10: Salidas medidas para el sistema con el controlador -2H Kyu = ............................. 75
Figura 5.11: Salidas controladas para el sistema con el controlador -2H Kyu = ......................... 76
Figura 5.12: Autovalores en lazo cerrado del sistema variando el parámetro incierto ..................... 78
Figura 5.13: Salidas medidas para el sistema con el controlador -2H Kyu = y ubicación de polos .... 78
Figura 5.14: Salidas controladas para el sistema con el controlador -2H Kyu = y ubicación de polos 79
Figura 5.15: Autovalores en lazo cerrado del sistema variando el parámetro incierto ..................... 81
Figura 5.16: Salidas medidas para el sistema con el controlador -∞H Kxu = ............................. 81
Figura 5.17 Salidas controladas para el sistema con el controlador -∞H Kxu = .......................... 82
Figura 5.18: Análisis SVD para -sistema físico- con ∞H Kxu = ............................................. 82
Figura 5.19: Autovalores en lazo cerrado del sistema variando el parámetro incierto ..................... 84
Figura 5.20: Salidas medidas para el sistema con el controlador -∞H Kxu = y ubicación de polos .... 85
Figura 5.21: Salidas controladas para el sistema con el controlador -∞H Kxu = y ubicación de polos 85
Figura 5.22: Análisis SVD para -sistema físico- con ∞H Kxu = y ubicación de polos .................... 86
Figura 5.23: Autovalores en lazo cerrado del sistema variando el parámetro incierto ..................... 88
Figura 5.24: Salidas medidas para el sistema con el controlador -∞H Kyu = ............................. 88
Figura 5.25: Salidas controladas para el sistema con el controlador -∞H Kyu = ......................... 89
Figura 5.26: Análisis SVD para -sistema físico- con ∞H Kyu = ............................................. 89
Figura 5.27: Autovalores en lazo cerrado del sistema variando el parámetro incierto ..................... 91
Figura 5.28: Salidas medidas para el sistema con el controlador -∞H Kyu = y ubicación de polos .... 92
Figura 5.29: Salidas controladas para el sistema con el controlador -∞H Kyu = y ubicación de polos 92
Figura 5.30: Análisis SVD para -sistema físico- con ∞H Kyu = y ubicación de polos .................... 93
xi

xii
Agradecimientos
En estas líneas quiero agradecer a todas aquellas personas que de una u otra forma me brindaron su apoyo para alcanzar una de mis metas más anheladas, el titulo de Ingeniero de Sistemas. Pero muy especialmente y de corazón:
A DIOS TODOPODEROSO por concederme alcanzar esta meta. A mi señora madre Adela del Carmen Durán porque de no haber sido mí ejemplo a seguir no habría llegado tan lejos. Gracias madre, este logro lo dedico por completo a tu memoria. A mis hermanos Marisela, Jimmy, Jhony y Alexander por ser mi motivación para seguir adelante. En especial a David Anand por haber estado a mi lado en los momentos más difíciles y por su constante apoyo. Mil gracias… te AMO. Al profesor Addison Ríos Bolívar por haberme dado el privilegio de llevar a cabo esta investigación.
Al profesor Williams Colmenares por que sin conocerme me brindó su apoyo. Gracias muchas gracias.
A Nelson Cegarra por siempre motivarme a seguir adelante… Gracias. A Braulio Salcedo Valladares por su constante preocupación, un millón de gracias. A mis compañeros de estudio en especial a Víctor, Fernando, Justo e Yrian porque juntos compartimos momentos de angustia y de alegría. Al CDCHT por financiar este proyecto de investigación. Y a mi persona, por tener el valor de seguir adelante cuando muchos me decían que no lo hiciera. A ellos les digo ‘NO HAY LOGRO QUE SE ALCANCE SIN PROPÓSITO…’

Capítulo 1
Introducción
Todo modelo matemático es, en realidad, una aproximación del sistema real (debido a que éste es
o dependerán, en gran medida, de la
xactitud con la que dicho modelo capte los rasgos funcionales del proceso, es decir, el grado de
pueda ser descrito
ue se incrementarán si se trata de aproximar al sistema con un modelo lineal e invariante en el tiempo.
en estar sometidos a diferentes tipos de incertezas, debidas a dinámicas
o modeladas, ruidos, linealizaciones, entre otras incertidumbres. Dependiendo de su origen estas
Por tanto, es de suma importancia que las incertidumbres sean tomadas en cuenta en el análisis
incierto, constituido por el modelo matemático (sistema nominal), más las incertezas a las que está
xigentes, como por
jemplo, que el comportamiento del sistema sea aceptable en un ambiente realista donde las
istemas de control como por ejemplo: cómo modelar y describir las
certezas en el problema, cómo analizar el sistema de control y cómo diseñar el controlador.
s, se hace necesaria la introducción de nuevos
trol Robusto y es una de
sometido a simplificaciones), por lo que las características de diseñ
e
aproximación con que éste describa el comportamiento del sistema.
Existen casos en los cuales la complejidad del proceso impide que el mismo
de manera precisa por un simple modelo matemático. En cuyos casos se habla de errores de modelado
q
En este sentido, los modelos matemáticos de un proceso real son considerados imprecisos
consecuentemente por que pued
n
incertezas pueden clasificarse como estructurales, no estructurales, paramétricas y no paramétricas.
y síntesis de controladores, por lo que es conveniente representar el modelo físico por un sistema
sometido y finalmente hacer el análisis en torno al sistema incierto obtenido.
La necesidad de cumplir con especificaciones de diseño, cada vez más e
e
incertidumbres están siempre presentes, ha llevado a tener en consideración aspectos prácticos
importantes en el desarrollo de los s
in
Para dar solución a los aspectos antes mencionado
conceptos y herramientas para el análisis y diseño de sistemas de control con el manejo de
incertidumbres. El campo de aplicación de la nueva disciplina es llamado Con

Capítulo1-Introducción 2
las disciplinas de la teoría de control que da cabida a aquellos sistemas que presentan incertezas en su
modelo y que toleran un controlador fijo lineal e invariante en el tiempo.
El objetivo de esta nueva disciplina es buscar una solución para el sistema de control formado
por el sistema nominal y l ia de incertidumbres en torno a él, así como también minimizar el
efecto de perturbaciones externas sobre variaciones del sistema, como ruidos, variaciones de
tre otros aspectos.
Para atender a la problemática que se hace presente cuando se introducen en el análisis los
aspectos mencionados anteriormente, serán formulados controladores robustos basados en la
1.1 A
depende
merosos métodos para el
análisis y dise
a famil
temperaturas, ráfagas de viento en
caracterización de las normas 2 e ∞ como desigualdades matriciales lineales, enfocados con
controladores del tipo realimentación del vector de estados y realimentación estática de la salida en
presencia de incertidumbres de tipo politópica en el modelo de la planta.
ntecedentes
Para estudiar un sistema de control se hace necesario la obtención de un modelo cuya fidelidad
rá en gran medida de qué tan complejo sea el proceso bajo estudio. El modelado de cualquier
sistema lleva consigo un proceso de simplificación que a su vez incurre en incertidumbres en el modelo
matemático obtenido. Esta incertidumbre se debe, en la mayoría de los casos, a que no se consideran no
linealidades, retardos de tiempo, dinámica de alta frecuencia, entre otros aspectos.
En este sentido, existen sistemas que no pueden ser descritos fielmente por modelos
matemáticos. Como consecuencia de la incertidumbre, se hace necesario emplear una teoría de control
avanzada, como por ejemplo la teoría de control robusto que se encarga del estudio de las familias de
posibles plantas producto de estas incertidumbres. Se han desarrollado nu
ño de estos sistemas, sin embargo, para fines de la investigación se destacan:
Para las décadas de los 60-70 fue desarrollada la solución al problema de optimización 2H
(Youla, Bongiorno y Jabr, 1976), también denominada Wiener-Hopf; Mientras que el diseño con
∞H se inicio en el decenio de los 80 (Zames y Francis, 1983; Doyle, Glover, Khargonekar y Francis,
1989) y continúan aun su desarrollo.
El problema del control óptimo H∞ fue formulado en 1981 por Zames para el caso escalar
basado en la representación entrada-salida, en 1984 obtuvo la solución al problema (Zames y Francis,
1984). Posteriormente estos autores obtuvieron la solución para el caso multivariable. Los algoritmos

Capítulo1-Introducción 3
desarrollados desde 1984 a 1988 para la solución de los problemas H∞, por lo general, tenían el
inconveniente de que el controlador obtenido era de orden elevado (Francis, 1987) en comparación con
el de la
e, Glover, Khargonekar y Francis, 1989), logran
obtener
s en los últimos años se han
llevado a cabo en las áreas de control de procesos químicos, robótica, estructuras flexibles y control de
Muscato, 1993).
Como consecuencia de los resultados obtenidos y la importancia que ha significado para la
ladores a diseñar en
este trab
ack
con
tos y algunas condiciones necesarias y suficientes basadas en LMI
son pres
planta, por lo que se hacia necesario realizar un arduo trabajo para obtener reguladores de orden
reducido antes de la implementación física de estos.
Es en 1989 que se da comienzo a la segunda generación de algoritmos en el espacio de estados
de la teoría ∞H cuando Doyle y colaboradores (Doyl
un controlador de la misma dimensión que la planta generalizada (modelo del proceso más las
matrices de ponderación que componen las especificaciones de diseño). Generación caracterizada por el
planteamiento del problema de optimización formulado y solucionado a partir de dos ecuaciones
desacopladas de Riccati.
Las principales aplicaciones de la teoría de control robusto realizada
aeronaves (Dorato, Tempo y
ciencia, el desarrollo de la teoría del control robusto, han surgido diferentes herramientas de CACSD
(Diseño de Sistemas de Control Asistido por Computadora) para el diseño de sistemas de control
robusto, entre los cuales se pueden citar: Program CC (Thompson, 1988), Robust-Control Toolbox (Chiang
y Safonov, 1992) y µ-Analysis and Synthesis Toolbox (Balas, Doyle, Glover, Packard y Smith, 1991).
Siendo el Robust-Control Toolbox, la herramienta usada para el análisis de los contro
ajo.
Entre las investigaciones más recientes realizadas basadas en esta teoría pueden mencionarse:
Boyd, El Ghaoui, Feron y Balakrishnan (1994) plantearon el estudio del controlador PID como
la solución de un problema de optimización haciendo uso de las desigualdades matriciales lineales
(LMI’s) para sistemas con incertidumbres politópicas.
Wang y Zhang (2001), trabajaron con “An LMI Approach to Static Output Feedb
Stabilization of Linear Systems”, reporte en el que una desigualdad matricial lineal es aproximada para el
trol por estabilización estática de la salida extendida (SOF). Como una aplicación, es considerado el
problema de SOF para sistemas incier
entadas.
En la Universidad Simón Bolívar, Granado, Mata, Colmenares, Revollar y Pérez hicieron
público un estudio denominado Controlador PID robusto multivariable basado en el método iterativo

Capítulo1-Introducción 4
de desigualdades matriciales lineales (ILMI), donde presentan la síntesis de un controlador
Proporcional-Integral-Derivativo (PID) robusto discreto multivariable para un sistema lineal incierto
sometido a incertidumbre politópica, cuyo algoritmo se formuló como un problema de programación
convexa basado en ILMI.
Colmenares y Tadeo (2005), hicieron público un libro titulado “APUNTES SOBRE
CONTROL ROBUSTO Y MULTIOBJETIVOS DE SISTEMAS”, centrando su estudio en la
programación convexa (lineal y semidefinida) aplicada al control, la cual permite estudiar en un marco
unificado las incertidumbres sobre el sistema y sobre las perturbaciones externas. Apuntes en los que se
concentraron en el diseño de sistemas de control para sistemas lineales invariantes en el tiempo, a los
que se imponen múltiples objetivos en el desempeño del lazo cerrado de control.
étodo para la síntesis de filtros robustos de detección y
diagnós
y Acuña (2008), trabajaron en un reporte técnico sobre el control robusto por
realime l
tiempo,
descritas como desigualdades matriciales
lineales
o consiste en diseñar ganancias de realimentación para la salida y su derivada.
Establec
Mazars y Zolatas (2007), presentaron resultados de estudios realizados en la detección robusta
de fallas (DRF) en sistemas politópicos.
Ríos y Acuña (2007), estudiaron un m
ticos de fallas en sistemas lineales invariantes en el tiempo (LTI) continuos con incertidumbres
politópicas. Método de diagnóstico robusto de fallas basado en optimización convexa, utilizando una
representación afín, mediante LMI’s, para los sistemas politópicos. Esto es, el diseño de los filtros de
detección de fallas preserva condiciones de desempeño en ∞HH /2 y respectivamente de la
incertidumbre en los parámetros del sistema. Estableciéndose, además, condiciones de detectabilidad y
separabilidad de fallas en sistemas politópicos.
Ríos
ntación Estática de la Salida Extendida, donde consideran sistemas lineales invariantes en e
continuos con incertidumbres politópicas, presentando un método para la síntesis de filtros
robustos de detección y diagnóstico de fallas. Método basado en condiciones de desempeño
modificadas, establecidas a partir de las normas H ∞H/2
(LMI’s).
Ríos y Rivas (2008), formularon un estudio titulado “ ∞H Control by Extended Static Output
Feedback” como contribución para tratar el problema de síntesis de controladores robustos para
sistemas lineales con incertidumbres politópicas mediante la realimentación estática extendida de la
salida. El métod
iendo condiciones para la existencia de tales controladores. El problema de estabilización se
formula en el contexto de desigualdades matriciales lineales (LMI).

Capítulo1-Introducción 5
1.2 Planteamiento del problema
En la industria, los procesos tienen un nivel de complejidad que impide que estos puedan ser descritos
de manera precisa por un modelo matemático que capte los rasgos funcionales de dicho proceso. Por
esta raz
amiento global de los
proceso
ferencia es denominado controlador y es estudiado en la teoría
del Con
real sería bastante considerable.
Para solucionar este problema, se plantearán las especificaciones de diseño en términos de la
2 ∞
iciales lineales (LMI) (Boyd, El Chaoui, Feron y
Balakrishnan, 1994).
La síntesis de los controladores robustos estará fundamentalmente enfocada al diseño de una
realimentación de estados en sistemas con incertidumbres modeladas como politópos, para derivar un
1.3 Justificación
ón, se habla de errores de modelado o de incertidumbres en el modelo como consecuencia de:
no linealidades no consideradas, dinámica de alta frecuencia no modelada, retardos de tiempo no
contemplados, entre otros. Además, en todos los procesos técnicos se tiene la presencia de
perturbaciones que afectan negativamente el desempeño operacional de los sistemas.
Es por esto que, es indispensable hacer uso de un elemento de control que atenúe los efectos
adversos que estas incertidumbres y perturbaciones puedan ocasionar en el funcion
s técnicos.
Este elemento al que se hace re
trol Robusto bajo la perspectiva de que el sistema dinámico (modelo más incertidumbre) sea
estable robustamente en lazo cerrado a pesar de estar sometido a diversos cambios. De no tener en
cuenta estos aspectos, los estudios realizados en una planta industrial o en cualquier sistema de control
con estas características estarán sometidos a errores ya que la diferencia entre el modelo y el sistema
minimización de una función de costo, haciendo uso de las normas H (Wiener-Hopf) y H (Zames y
Francis, 1984), como sistemas de desigualdades matr
conjunto de desigualdades matriciales lineales que representan la caracterización del desempeño del
sistema en lazo cerrado.
Debido a que no siempre se puede modelar con exactitud la dinámica de cualquier sistema de control y
las perturbaciones presentes en el mismo, se hace imprescindible el uso de una teoría de control, en
nuestro caso consideramos la teoría de control robusto. Esta teoría permite garantizar la estabilidad y el
desempeño de un sistema a pesar de estar sujeto a situaciones que no son conocidas de su
Capítulo1-Introducción 6
funcionamiento, como consecuencia de la incertidumbre presente en el modelo y de perturbaciones
externas a las que está sometido todo sistema de control.
2 ∞ de herramientas
comput
1.5 O
esempeño de ambos controladores.
1.6 Estructu
gunos fundamentos matemáticos utilizados por la teoría de control robusto,
mas puesto que dan una cota como medida del índice de desempeño del
introduce la descomposición de los valores singulares que será usada para
sistemas y diseño de controladores así como también, las regiones para asignación de polos descritas en
1.4 Delimitación
El estudio será enfocado en la aplicación de la técnica de realimentación del vector de estados y
extendido al caso de realimentación estática de la salida a sistemas lineales invariantes en el tiempo con
incertidumbres de tipo politópicas. En cuanto al diseño de los controladores, serán desarrollados en el
dominio de las normas H y H caracterizadas como LMI’s, haciendo uso
acionales como MATLAB, a través del Robust-Control Toolbox (Chiang y Safonov, 1992) y LMI
Toolbox.
bjetivos
Objetivo general
Diseñar controladores por realimentación de estados para sistemas lineales e invariantes en el tiempo
con incertidumbres politópicas.
Objetivos específicos
• Diseñar un controlador basado en el problema de optimización de la norma H2 como LMI.
• Diseñar un controlador basado en el problema de optimización de la norma H∞ como LMI.
• Comparar el d
ra del documento
En este documento se presentan cinco Capítulos en total, incluyendo este Capítulo introductorio. En el
Capítulo 2 se definen al
como por ejemplo, las nor
sistema, de igual manera, se
representar la cota máxima que alcanza el sistema en lazo cerrado una vez diseñado el controlador
robusto ∞H . En el Capítulo 3 se presenta una introducción al Control Robusto dando cabida a
conceptos básicos como lo son: los tipos de incertidumbres, la estabilidad de un sistema, se muestran las
desigualdades matriciales lineales (LMI’s), como la herramienta en la que se fundamenta el análisis de

Capítulo1-Introducción 7
función de las LMI’s. En el Capítulo 4 se proponen las síntesis de controladores
robustos ∞HyH 2 caracterizadas como formulaciones LMI’s para el caso realimentación del vector de
n probados además los teoremas propuestos en el
capitulo anter or. En el Capítulo 5 se formula el diseño de controladores robustos para un
estado y realimentación estática de la salida y donde so
i ∞
sistema físico sometido a incertidumbre de tipo politópica y se presenta un estudio detallado de la
región de estabilidad de los autovalores en lazo cerrado del sistema, una vez se ha completado el diseño
del controlador.
HyH 2

Capítulo 2
Fundamentos teóricos
En esta sección se expondrán los conceptos matemáticos usados para el desarrollo y aplicación de los
métodos que serán tratados en los próximos capítulos. Siendo una herramienta útil para el análisis del
sistema bajo estudio, por otro lado, para fines de diseño de controladores robustos es de mucha
importancia conocer la magnitud de las señales que yacen en el sistema mismo, es decir, señales de
ruido y de perturbación. Por esta razón, se hace uso de normas por que dan una cota como medida del
desempeño del sistema.
Con el objeto de disminuir el efecto de tales señales, y mejorar el desempeño del sistema, se
propone la teoría de Control Optimo Robusto y , cuyo objetivo principal es encontrar un
controlador robusto que minimice el efecto del ruido o de la perturbación a la salida del sistema.
2.1 Normas
Las normas son operadores matemáticos que representan, de manera general, las medidas que dan
información sobre el tamaño de un vector, una matriz, una señal, un sistema, etc. Y que nos permiten
compararlas con sus similares (otro vector, matriz, señal, sistema, etc.). En este sentido, el control
óptimo busca minimizar una norma haciendo que el funcionamiento del sistema sea óptimo.
Las normas más utilizadas en control son la norma 2 y la norma ∞ y el objetivo principal es
minimizar dichas normas de la respuesta del sistema en lazo cerrado que constituyen una función de
costo.
Definición 2.1 Sea un espacio vectorial sobre
2H ∞H
E R (reales) o (complejos). Una Norma sobre C
E es una función no negativa denotada por E∈x→ xx , y cumple las siguientes propiedades:
b) si y E∈x 0=x entonces 0=x .
ii) si CóR∈λ , entonces E∈x xx .λλ = .

Capítulo 2 - Fundamentos teóricos 9
yxyxentoncesy,xsi +≤+∈Eiii)
Dado un espacio lineal y una norma E ⋅ sobre , el par (E E , ⋅ ) es llamado Espacio Normado.
Si (espacio l con
. La siguiente formula def ne las norma s sobre
ineal) es nC y considerando que nCx∈ , entonces ( 1xx =E
i
),,, 2 nxx K
nC : Cxi ∀∈ , i s comúnmente usada
),1[)......(:1
321 ∞∈++++= xxxx PP Px PPN
P
p
Donde:
ix es la magnitud de ix .
∞x es interpretada como ii xmax .
2x es conocida como norma 2 o Longitud Euclidiana del vector x .
Solo tres normas típicas son utilizadas comúnmente, la 1,2 e ∞
Norma de un vector
La norma de un vector x de n elementos, complejos o reales, es una función )(xf que transforma el
es al espacio de los números reales no negativos.
Dado un vector se definen las siguientes tres normas típicas en
nCespacio de los vector
[ ]Txxxx K= nC : N21
Norma 1:
∑=
≡N
iixx
11
Norma 2 o euclidiana:
∑=
≡≡N
T xxxx 2
ii
12
Norma ∞:
ix max≡
∞
ix

Capítulo 2 - Fundamentos teóricos 10
Ejemplo 2.1
[ ]T5
Solució Ap es tiene:
a) Norma 1:
: Norma de un vector.
Dado el vector X 69174= . Calcular las normas 1,2 e ∞ correspondientes.
n: licando las definicion anteriormente dadas se
326917451
1=+++++== ∑
=
N
iixX
b) Norma 2:
4222,14691745 222222
1=i
2
2=+++++== ∑
N
ixX
b) Norma ∞:
9691745maxmax ===∞ ii
xX
,
la medida resultante es distinta.
Una matriz es la composición de vectores bien sea por filas o columnas, e igual que estos, poseen tres
:
Nótese que dependiendo del tipo de norma escogida, para medir el tamaño del mismo vector
Norma de una matriz
normas muy utilizadas y tienen algoritmos prácticos para calcular sus valores
Norma 1:
∑=i
ijjaA max
1
Norma 2 o Norma espectral:
( )AAA A A = max2
Tii
σλ =)( máximo valor singular de
Donde ( ),)(det)( AAIAA TTi −= λλ el superíndice T denota la transpuesta y los autovalores de
no negativos.
Los valores singulares de una matriz se calculan usando el algoritmo SVD (de descomposición
de valores singulares), que se estudiará más adelante.
) necesariam(ATiλ A ente son reales y

Capítulo 2 - Fundamentos teóricos 11
Norma ∞:
∑=∞
jiji
aA max
Norma Frobenius o Euclidiana:
2/1
2)( ⎥⎦
⎤⎢⎣
⎡= ∑∑
i jijF
aA
Norma inducida:
Axx
AxA
xx 10supmax
=≠==
Esto significa considerar el conjunto de todos los vectores de longitud unidad.
Dada la matriz A, Calcular las normas 1,2 e ∞ correspondientes.
Solució o la definición de cada norma se tiene:
b) Norma 1(máximo entre las sumas de cada columna):
Ejemplo 2.2: Norma de una matriz.
⎥⎥⎥
⎦⎢⎢⎢
⎣
=017952A
⎤⎡ 381
n: Aplicand
[ ] 14121410maxmax3ij1
=== ∑ ijaA
b) Norma-2:
)(max2
A =
⎤21 25 54
AATii
λ
⎥⎥⎥
⎦⎢⎢⎢
⎣ 90 69 21 69 90 25
⎡=AAT

Capítulo 2 - Fundamentos teóricos 12
Aplican se hallan los autovalores correspondientes a la matriz . ))(det( AAI T−λ AATdo la ecuación
16 45,0481 20,6883
3
2
1
===
λλλ
8,2637
, por lo tanto: 9716.122637.1682
==A 3λEl máximo autovalor corresponde a
c) Norma ∞ (máximo entre la suma de las filas):
168
1612
max,
=⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛== ∑∞
ijiji
aA
b) Norma Frobenius o Euclidiana:
))(( AAdiagsumA TF=
Se obtiene la diagonal de AAT , esto es, ))(( = sumAAdiagsum T 234)909054( =++ y se obtiene:
2971.15234 ==F
A
Norma de una señal
o en un número real no negativo según la
Definición 2.2 Una señal es una función donde representa el conjunto tiempo y
define el espacio de la señal.
Una señal representa en cada instante de tiempo
La norma de una señal transforma una función del tiemp
definición.
s WT→: RT ⊆
WmRTs →: Tt∈ a un vector:
El ‘tamaño’ de una señal es medido por normas.
sí se tienen los casos particulares:
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
=
)(
)()(
)( 2
1
ts
tsts
ts
m
M
A

Capítulo 2 - Fundamentos teóricos 13
Norma 1:
∫∞
= dttxtx )()( ∞−
1
Esta norma es llamada la acción de la señal x, porque puede ser visto como una medida para la acción
total asociada con la señal.
Norma 2:
∫∞
∞−
= dttxtx 22
2)( )(
En sistemas eléctricos y mecánicos la energía física asociada con una señal puede ser expresada por la
integral cuadrática. Por lo que esta norma es considerada como la en gía de la señal x.
Norma ∞ :
er
)(sup)( txtxRt∈
∞=
Esta norma representa la magnitud máxima que puede tomar la señal, razón por la cual es llamada
mplitud de la señal.
Ejemplo 2.3: Norma de señales.
Dada la señal x(t), Calcular las normas 1,2 e ∞ correspondientes.
a
00)(;10)( 2 <∀==−
ttxetxt
Solución: Aplicando la definición de cada norma se tiene:
b) Norma 1:
∫= dttx )(∞
∞−
tx )(1
2010)( 21
== ∫∞
∞−
−
dtetxt
b) Norma 2:

Capítulo 2 - Fundamentos teóricos 14
∫∞
2
∞−
= dttxtx 2
2)()(
100)100()( 2
2 ∫∞−
==∞
− dtetx t
10100)( ==tx 2
b) Norma ∞:
)(sup)( txtxRt∈
∞=
2sup)(t−
Rt∈etx
∞=
El supremo de la señal, esta dado por el punto más alto de la respuesta de ésta en el tiempo.
0 1 2 3 4 5 6 71
2
10
3
4
5
6
7
8
9
Figura 2.1: Respuesta en tiempo de 210)(t
etx−
=
Como muestra el gráfico anterior, el mayor valor que toma la función corresponde al punto 10, por lo
emo de dicha señal.
De este modo:
tanto éste es el supr
10sup)( 2 ==−
∈∞
t
Rtetx
Norma de sistemas
ferencia a un conjunto de señales. Éste describe las relaciones entre el conjunto de
señales de entrada y el conjunto de señales de salida, que pueden estar representadas por funciones de
Un sistema hace re

Capítulo 2 - Fundamentos teóricos 15
transferencia, ecuaciones diferenciales, ciones en espacio de estado, entre otras. Sea el
sistema definido en el dominio de la frec o:
representa
uencia com
)()()( sUsGsY =
y en el dominio del tiempo como:
ignifica que para
de transferencia o la transformada de Laplace de , entonces es racional
con coeficientes reales. Cumpliendo con las siguientes propiedades:
i. es estable si es analítica en el semiplano derecho cerrado
ii. es propia si es finita, en otras palabras que el grado del denominador sea que el
iii. es estrictamente propia si es igual a cero, es decir, que el grado del denominador
que el grado del numera
iv. es bipropia si son cada una propia en el sentido que el grado del denominador sea
igual al grado del numerador.
Se definen dos normas para la función de transferencia (Doyle y Francis, 1992).
Norma 2:
τττ duthty ∫∞
∞−−= )()()(
0)( =tG 0<t . S
Sea )(ˆ sG la función G )(ˆ sG
)(ˆ sG )0(Re ≥s .
)(ˆ sG )(ˆ ∞jG ≥
grado del numerador.
)(ˆ sG
sea >
)(ˆ ∞jG
dor.
)(ˆ sG 1ˆˆ −GyG
G
21
222
)(ˆ1:ˆ =⎟⎞
⎜⎛
= ∫∞
tdwjwGG1
)( ⎟⎞
⎜⎛∫∞
dtG 2 2 ⎟
⎠⎜⎝
⎟⎠
⎜⎝ ∞−∞−π
Norma ∞:
)(sup)(ˆsup:ˆ tGjwGGRtRw ∈∈∞
==
Para sistemas SISO, la norma de es igual a la distancia en el plano complejo desde el origen al
f , y en el gráfico de magnitud de Bode, es medido como
el valor pico ó magnitud mas grande que alcanza el gráfico. Una propiedad importante de la norma ∞ es
∞
ico de
G
Nyquist de Gpunto más lejano en el grá
que es submultiplicativa, esto es:
∞∞∞≤ HGHG ˆˆˆˆ

Capítulo 2 - Fundamentos teóricos 16
donde H es otra función de transferencia.
Lema 2.1 La norma 2 de G es finita si y solo si G es estrictamente propia y no tiene polos en el eje
imaginario. La norma ∞ es finita si y solo si no tiene polos en el eje imaginario.
Comentario 2.1 la norma 2 es sensible a la localización de los polos mientras que la norma ∞ solo
amplitud.
Dada la sistema G(s), Calcular las normas 2 e ∞ correspondientes.
G es propia y
depende de la
Ejemplo 2.4: Norma de sistemas.
44+s
)( =sG
ición frecuencial de cada norma y Cambiando a ‘s’ por ‘jw’ se tiene:
Solución: Aplicando la defin
44)(+
=jw
jwG , entonces:
a) Norma 2:
242
)(ˆ2
ˆ2
=⎟⎜
⎜+
=⎟⎟⎠
⎜⎜⎝
= ∫∫ dwjw
dwjwGGππ
411
21
22 ⎟
⎠
⎞
⎝
⎞⎛ ∞
∞−∞−
b) Norma ∞:
21
⎛∞
44sup)(ˆsupˆ+
==∈∈∞ jw
jwGGRwRw
1)( =
1)(0
1)(0
∴
<⇒>
=⇒=
jwGw
jwGw
∞sG

Capítulo 2 - Fundamentos teóricos 17
2.2 V lores singulares a
y
Sea el sistema definido como:
ujwG )(=
La ganancia de la respuesta en frecuencia puede ser descrita como la amplitud entre la salida )( jwG
y y la entrada u medida por la norma 2
( )( ) ))(()()(max)( 21
2jwGjwGjwGjwG T
iiσλ ==
)( jwGσ es el valor máximo singular de y el mínimo valor singular se define como
2
20 )(
)()( jwujwGinf))((
ujwG
u≠=σ
norma 2 entre la a entrada , el máximo y el mínimo singular de determinan la
cota superior e inferior respectivamente para esta ganancia.
La descomposición de valores singulares, consiste en descomponer una matriz en tres matrices, dos
unitarias y una real diagonal formada por los valores singulares que representarán la ganancia entre cada
ar de vectores de las bases de entrada y salida. Esta descomposición provee un conjunto de bases de
les para el espacio de entrada y el espacio de salida de la matriz. Que sean
ortonormales indica que son ortogonales y de longitud (norma 2) unidad y el que constituyan una base,
revela que cualquier vector puede escribirse como la combinación lineal de los vectores de la base. Se
tiene que:
jw
Definición 2.4 Si la ganancia de una matriz de transferencia )(sG es medida como la amplitud de la
salida y y l u )( jwG
Descomposición de valores singulares
p
vectores ortonorma
iσ representa los valores singulares y se calculan como sigue.
kiAAA Tii ,,2,1)()( K== λσ
es ordenado de tal manera que 1+≥ ii σσdonde iσ .
Entonces:
)()(
)()(
1
2
AA
AAA
i
i
+=
==
σσ
σσ

Capítulo 2 - Fundamentos teóricos 18
Lema 2.2 sea mnCA ×∈ una matriz compleja, entonces, existen dos matrices unitarias ,
tal que:
donde
mnCU ×∈mn× nmR ×∈ΨCV ∈ y una matriz diagonal
TVUA ψ=
⎥⎥⎥⎥⎥
⎦⎢⎢⎢⎢⎢
⎣
⎥⎦
⎤⎢⎣
⎡=
Tn
Tk
m
V
VUUUA
ML 2
21 000
][ψ
⎤⎡ TV1
∑=
=i
Tiii VUA
1σ
k
⎥⎥⎥⎥⎥
⎥⎥
⎦
⎤
⎢
⎢
⎡
==
0000000000
0000000
)(
1
kσ
σ
σσσσ⎥
⎢
⎢⎢⎢
0000000
0000
3
2
321 kk diagonalσ
σ
ψ ; LL
⎢⎢⎣ 000
U son los autovalores de TAA y
V son los autovectores de AAT .
La matriz V es la base de los vectores de entrada y U la base de los vectores de salida.
Propiedades de los valores singulares
i. )(
1(Aσ ) 1−=Aσ
.
ii. R∈= αασασ ;)()( AA .
)()()( BAAB σσσ ≤ . iii.
iv. )()() BAB(A σσσ +≤+ .
)(1)( 1−=A
Aσ
σ . v.

Capítulo 2 - Fundamentos teóricos 19
A uDefinición 2.5. Sea na matriz y si IAAT = , entonces, A se denomina una matriz un a
tidad. Por lo tanto, en osición d
itaria e I l
matriz iden la des e valore gulares y deben cumplir:
Ejemplo 2.5: Descomposición de valores singulares.
Dada la matriz A obtenga la descomposición en valores singulares
ón: Se sabe que ; son los autovalores de y son los autovectores de
. Se obtienen las matrices correspondientes. (Ver apé plo2.5.m)
;
comp s sin U V
IUUIVV
T
T
=
=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
5 1 31 4 23 2 1
A
Soluci TVUA ψ=
U y V
U TAA
ndice A Ejem
V
AAT
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
0.7387 0.5463 0.3948 0.4732 0.8375- 0.2734 0.4799 0.0151- 0.8772-
U⎥⎥⎦⎢
⎢⎢
⎣
⎡=
7.5896 0 0 0 3.3838 0 0 0 0.9734-⎥⎤
ψ ; y
⎥⎦⎢⎣ 0.7387 0.4732 4799 ⎥⎥⎤
0.5463 753948 34
⎢⎢= 0.0.83- 0.0151- TV⎡ 0. 0.27 0.8772-
Para verificar, calculamos A como: TVUA ψ= y se obtiene:
;
o que se verifica la anterior afirmación.
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
5.0000 1.0000 3.00001.0000 4.0000 2.00003.0000 2.0000 1.0000
5 1 31 4 23 2 1
A
Con l

Capítulo 3
Introducción al control robusto
El control robusto es una de las disciplina de la teoría de control que centra su estudio en sistemas que
dan cabida a incertidumbres en su modelo y que admitan al menos un controlador fijo invariante en el
tiempo, por eso se ha convertido en una de las herramientas más potentes a la hora de realizar el
con las car er
or diseñado
funcione bien al momento de su implantación en el proceso real, a su vez, este objetivo está compuesto
por una serie de subobjetivos. Uno de los principales, es que el sistema sea estable en ausencia de
incertidumbre, para especificaciones de desempeños dadas. Es lo que se conoce en la teoría como
estabilidad nominal.
Otro requerimiento, una vez conseguida la estabilidad nominal, es que ciertas variables del
sistema exhiban un comportamiento adecuado y en algunos casos óptimo respecto a una función de
coste o índice de desempeño. Objetivo que se tiene en consideración cuando es referenciado como
comportamiento nominal.
Una vez que el sistema de control diseñado con el modelo nominal es estable, atañe asegurar
es plantas productos de la incertidumbre
presente en el modelo. A este objetivo se le conoce con el nombre de estabilidad robusta.
Debe considerarse además, que no basta con que para toda la familia de plantas el sistema
permanezca estable sino que debe cumplir con las cificaciones de diseño establecidas, es así como
surge la última y no menos importante exigencia de la teoría a la que se le conoce como
omportamiento robusto.
oblema de diseño así como también los diferentes niveles
de exigencia que se establece sobre un sistema de control, tal y como se ha descrito anteriormente.
análisis y diseño de sistema act ísticas antes mencionadas (sistemas inciertos).
Los objetivos del Control Robusto, en cualquier caso, buscan que el controlad
que el sistema mantenga la estabilidad para la familia de posibl
espe
c
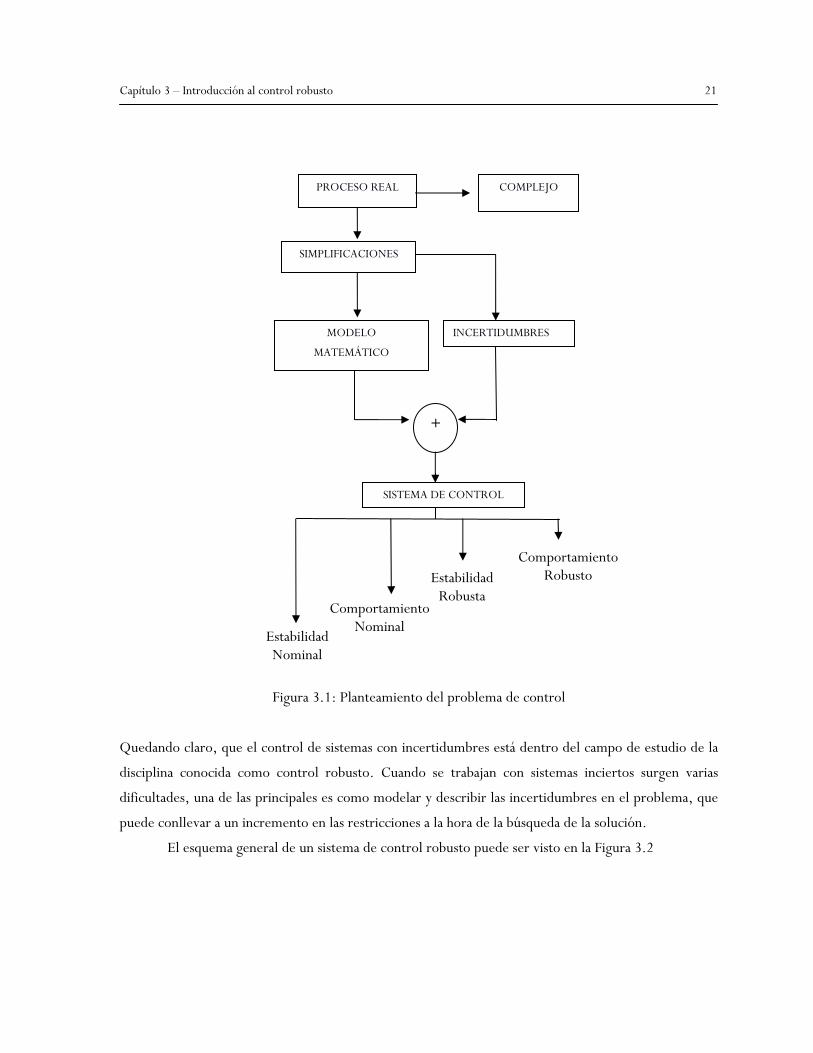
En la Figura 3.1 queda resumido el pr
Capítulo 3 – Introducción al control robusto 21
PROCESO REAL COMPLEJO
SIMPLIFICACIONES
MODELO
MATEMÁTICO
INCERTIDUMBRES
SISTEMA DE CONTROL
+
Comportamiento Robusto Estabilidad
Robusta Comportamiento
Nominal Estabilidad Nominal
Figura 3.1: Planteamiento del problema de control
ipales es como modelar y describir las incertidumbres en el problema, que
puede c
Quedando claro, que el control de sistemas con incertidumbres está dentro del campo de estudio de la
disciplina conocida como control robusto. Cuando se trabajan con sistemas inciertos surgen varias
dificultades, una de las princ
onllevar a un incremento en las restricciones a la hora de la búsqueda de la solución.
El esquema general de un sistema de control robusto puede ser visto en la Figura 3.2

Capítulo 3 – Introducción al control robusto 22
G’ ∆G
Figura 3.2: Esquema general de un sistema de control robusto
La planta real puede expresarse de forma genérica como G′ GGG Δ+=′ , donde es el modelo
nominal de la representa la incertidumbr
G
planta, GΔ e presente en el modelo, η el ruido y las
perturbaciones externas.
Básicamente incluir incertezas en un nsiste en considerar que el sistema
real pertenece a una familia de modelos. Las formas de representar esta familia de modelos constituyen
los diferentes tipos de incertidumbres considerados.
3.1 Tipos de incertidumbres
Aditiva
d
sistema de control co
GGG Δ+=′
Figura 3.3: Incertidumbre Aditiva
Controlador G (Planta)
d
u y r
η
∆G
C G y
-
+ r +
+

Capítulo 3 – Introducción al control robusto 23
Multiplicativa a la entrada
)( GIGG Δ+=′
Figura 3.4: Incertidumbre Multiplicativa a la entrada
Multiplicativa a la salida
umbre multiplicativa a la salida
e realimentación de la planta
Figura 3.6: Incertidumbre de tipo realimentación a la planta
GGIG )( Δ+=′
Figura 3.5: Incertid
D
GGGIG 1)( −Δ+=′
+
+
y C G
-
∆G
r +
∆G
C -
+ r y +
+ G
y +
- C
r + G
-
∆G

Capítulo 3 – Introducción al control robusto 24
Bucle realimentado a la entrada
)( Δ+=′ GIGG
Figura trada
lida
Figura 3.8: Incertidumbre de tipo bucle realimentado a la salida
Considerando la representación general en espacio estado de un sistema lineal invariante en el tiempo.
1−
y
3.7: Incertidumbre de tipo bucle realimentado a la en
Bucle realimentado a la sa
GGI 1)( −Δ+=′ G
Politópica
DuCxyBuxAx
+=+= )(δ&
(3.1)
Donde es el vector de estados, es el vector de control, es el vector de salidas
medidas y como el vector de variables manipuladas das
nRx∈
Rz∈
que determinan como afect
matriz de dinámica
qRu∈ pRy∈
, B, C y D son matrices constantes conocizn
an las perturbaciones al sistema y la parte de él que se quiere controlar. La
)(δA
pertenece
es una matriz real no conoci
unto politópico
da, que puede o no ser constante y de la que sólo
a un conjse conoce que δβ .
Una clase de matriz )(δA con incertezas en forma politópica puede ser descrita por el conjunto
{ }rAAACoA ,,, 21 L=∈ δβ
G -
C -
+ r +
∆G
y G C
-
+ r
-
+
∆G

Capítulo 3 – Introducción al control robusto 25
Con δβ definiendo el conjunto politópico y el envolvente convexo y los autovalores de
son los vértices del politópo y consi ndo además:
(3.2)
Donde es un conjunto convexo cerrado y las matrices son conocidas.
Una característica importante de este tipo de abordaje para describir las incertezas es la convexidad del
conjunto resultante, esto es, se tiene por propiedad de convexidad que si un grupo de restricciones de
desigualdades e igualdades se satisfacen en los s
Entretanto, el problema de la explosión exponencial aparece cuando son probadas las
condiciones, por consiguiente al probar, por ejemplo, para un sistema con 3 elementos inciertos, se
tiene que verificar las condiciones para vértices, o sea, se tienen que verificar las condiciones 8
veces.
Antes de discutir los métodos para resolver problemas de control óptimo y robusto se debe
discutir la representación de plantas para que todas aquellas técnicas matemáticas puedan ser aplicadas a
problemas específic sto es representar,
de forma realista, las incertidumbres de la planta, en el marco de un sistema lineal.
adamente existe una poderosa herramienta para hacer esto: la transformación lineal
3.2 Transforma accional (L
La aproximación LFT se utiliza para modelar variaciones de la planta como ganancias lineales variables
en una estructura general de realimentación. Las ganancias pueden ser números reales, cuando
modelo lineal constante y un conjunto de ganancias
re en
sus parámetros. Estos parámetros pueden variar, incluso, no linealmente.
Co
derariAi ,...,, 1=
⎭⎬⎫
⎩⎨⎧
=≥== ∑∑==
r
iii
r
iiir yAAAAACo
111 10;)(|},,{ δδδδK
Α iA
vértices, entonces, se garantiza que estas misma
restricciones se satisfacen en el interior del área formada por estos vértices.
32
os. La clave para aplicar con éxito estos métodos de control robu
Afortun
fraccionaria (LFT).
ción lineal fr FT)
representan parámetros físicos, o números complejos, cuando representan cambios en la ganancia o la
fase de la respuesta en frecuencia. Todas las partes no variables de esta estructura pueden estar incluidas
en una matriz (normalmente dependiente con la frecuencia), y las partes variables en otra. Esta
separación de un sistema con incertidumbre en un
variable realimentadas es muy general, y puede modelar cualquier sistema lineal con incertidumb

Capítulo 3 – Introducción al control robusto 26
C
vectores de sa
onsideremos el sistema lineal P de la Figura 3.9, con dos vectores de entrada 21, uu y dos
lida 21, yy . P puede ser una matriz constante o dinámica representada en variables de
estado.
jo del diagrama, se puede
escribir:
P 1y 1u
22 y u
Figura 3.9: Diagrama LFT por debajo
Si otro sistema lineal lΔ es conectado desde 2y a 2u por la parte de aba
lΔ
2221212
2121111
uPuPuPuPy
+=
22 yuy
lΔ=
+=
Eliminando y se obtiene la respuesta del sistema en lazo cerrado
sta notación la LFT
po deba
ar un controlador
2y 2u
211
222111 )(),( PPIPPPF llll−Δ−Δ+=Δ
La matriz ),( ll PF Δ es llamada transformación lineal fraccional por debajo. Con e
jo indicará en control robusto la respuesta de la planta a lazo cerrado. El problema de control
óptimo será encontr K que minimice la norma 2 o la norma ∞ del sistema
De manera dual existe la transformación lineal fraccional por encima como se muestra en la
e ecuaciones relacionado con
la parte superior del diagrama es:
),( ll PF Δ según sea el caso.
Figura 3.10.
Figura 3.10: Diagrama LFT por encima
En este caso el sistema lineal uΔ es conectado de 1y hasta 1u . El sistema d
uΔ
1y 1u
P
2y2u

Capítulo 3 – Introducción al control robusto 27
2221212
2121111
uPuPyuPuPy
+=+=
11 yu uΔ=
Eliminando y resulta la respuesta del sistema en lazo cerrado
La matriz es llamada la transformación lineal fraccionaria por encima. Con esta notación la
LFT por enci n control robusto, la respuesta de la planta con perturbaciones
De lo que resta del capít a el estudio de sistemas lineales
po n st
s en el tiempo multi-entrada multi-salida (MIMO), de igual manera serán tratadas las normas
H2 y H∞ como un subconjunto de restricciones que de forma genérica se denominan restricciones
integrales cuadráticas (ICQ) (Boyd et al., 1994). Pero que igual pueden ser descritas como
desigualdades matriciales lineales (LMI’s), concepto que será definido más adelante, así mismo serán
mostradas las regiones LMI’s para la asignación de polos como herramientas poderosas a la hora del
ontroladores robustos an lineales se contará con el
complemento de Schur. Por ser métodos que servirán de base para el posterior desarrollo de los
3.3 Sistemas MIMO
En lo q
rá usado para el diseño de los controladores robustos en secciones posteriores.
Figura 3.1 n sistema
1y 1u
121
112122 )(),( PPPPPF uuuu−Δ−Δ+=Δ I
),( uu PF Δma indicará, e Δ .
ulo, se presentan conceptos básicos par
invariantes en el tiem , así, se prosigue co mo rar las características de los sistemas lineales
invariante
diseño de c y para desigualdades que no se
conceptos de control robusto 2H y ∞H descritas como un conjunto de LMI’s. Conceptos que sentarán
las bases para los capítulos siguientes.
ue sigue se muestra en forma general la representación de un sistema lineal invariante en el
tiempo, que se
1: Esquema de interconexión general de u
Planta
Controlador
Z
u
y
W

Capítulo 3 – Introducción al control robusto 28
Considerando sistemas lineales e invariantes en el tiempo (LTI) y dispuestos como se muestra en la
Figura 3.11 y cuya representación matricial (planta, controlador) en variables de estado está descrita
como sigue:
(3.3)
es el vector de salidas medidas y
mo
(3.4)
y que de manera extendida sería:
⎪⎩
⎨++=++==
uDwDxCyuDwDxCzG 12111
⎪⎧ ++= uBwBAxx 21&
22212
con: nR es el vector de estados del sistema;
wnRw∈ es el vector de entradas exógenas actuantes sobre el sistema: perturbaciones, ruidos, etc.
mRu∈ es el vector de entradas controladas de la planta generalizada.
pRy∈znRz∈ como el vector de salidas controladas.
Las matrices 222112112121 ,,,,,,,, DDDDCCBBA son matrices reales y de dimensiones apropiadas.
( )sGwz denota la función de transferencia en lazo cerrado de la perturbación w a la salida controlada
z .
El sistema, en general, estará dado co se escribe:
x∈
⎩⎨⎧
+=+=
DwCxzBwAxx&
De esta forma la función de transferencia queda descrita como sigue:
DBAsICBA
sG +−=⎤⎡
= −1)()( (3.5) D⎥⎦
⎢C⎣
[ ]
⎥⎦
⎤⎢⎣
⎡=
⎥⎦
⎤⎢⎣
⎡=
==
22211211
;21
;21;
DDDD
D
CC
C
BBBAA

Capítulo 3 – Introducción al control robusto 29
3.4 Estabilidad cuadrática
Estudiar la estabilidad es uno de los objetivos más importantes impuesto en la teoría de control a la hora
de estudiar cualquier sistema, ya que a ella se debe la necesidad de diseñar controladores. La finalidad
seño de estos elementos de control (controladores robustos) se corresponde a que el sistema ahora
s insensible a perturbaciones externas, cambios internos en el comportamiento de la planta
(errores de modelado que conlleva el modelo que la representa) o a incertidumbres presentes en el
sistema, entre otras características. Por esta razón, en la sección que a continuación se presenta será
con analizar los polos de dicha
es decir, si la parte real de los polos esta ubicada en el
e el sistema es estable en lazo abierto. En cambio, si
os polos se encuentra ubicado en el semiplano derecho, el sistema será inestable.
n sabido, una propiedad fundamental de los sistemas, es el concepto de estabilidad. Si se
; con , se dice que el sistema es asintóticamente estable si el estado alcanza el
con
del di
debe ser má
discutido é
Estabilid
Como es b
función pa
semiplano
alguno de est
Estabilida
Como es bie
)(tAxx =&
ste tema.
ad para funciones de transferencia
ien sabido, cuando se tiene una función de transferencia, basta
ra concluir sobre su estabilidad,
izquierdo abierto, entonces, se dice qu
d de sistemas dinámicos
considera la ecuación no forzada
0)0( xx =
valor cero con el tiempo, es decir, 0)( →tx ∞→t . Se puede demostrar que esto ocurre cuando
analizar la estabilidad
encontrando los autovalores de la matriz A.
Criterio de estabilidad de Lyapunov
un sistema lineal invariante en el tiempo sea estable, es que exista una
función cuadrática , que disminuya a lo largo de las trayectorias no nulas de
, si existe tal sistema es cuadráticamente estable y es llamada función
cuadrática de Lyapun d et al., 1994).
Subsecuantemente
los autovalores de la matriz A tienen partes reales negativas. Por tanto, se puede
Una condición suficiente para que
PxxxV T=)(
P , se dice que el
0>P
)(tAxx =& )(xV
ov (Boy
xPAPAxxVdtd TT )()( +=

Capítulo 3 – Introducción al control robusto 30
En otros términos, la condición necesaria y suficiente para la estabilidad cuadrática del sistema
) es que exista una matriz como soluciona a la desigualdad
Así pues, la lidad de u
estabilidad cuadrática
matriciales lineales (LMI).
trol robusto
ienta poderosa para el diseño y
de control ba o en
interés, un o recisa
l punto interior (Boyd et al., 1994).
rimeras LMI’s aparecieron alrededor de 1890, cuando Lyapunov publicó
su trabajo, que introduce lo que es conocido hoy como la teoría de Lyapunov (Boyd et al., 1994).
Para la teoría de Lyapunov, la ecuación diferencial
( )(tAxx =& 0>P
0<+ PAPAT (3.6)
Análisis de estabilidad para sistemas politópicos
Considerando el sistema lineal invariante en el tiempo
⎪21&
⎪⎩
⎨
⎧
==
++=
xCyxCz
uBwBAxx
2
1
donde { }AAACoA ,,, L∈ r21
El sistema es cuadráticamente estable si existe una matriz P definida positiva tal que:
],,1[0 riPAPA iT
i K∈∀<+
Prueba 3.1 sabiendo que:
⎧ rr
⎭⎬⎫
=≥== ∑∑== i
iii
ii yAAAAACo11
10;)(|},,{ λλλλ ⎩
⎨r1 K
y que: ∑=
<+=+r
i
TT PAPAPAPA1
0)()()( λλλ iii
estabi n sistema politópico queda asegurada con la estabilización de sus vértices.
Una manera de estudiar la de los sistemas es mediante las desigualdades
3.5 LMI’s en la teoría del con
Las desigualdades matriciales lineales (LMI’s) son una herram
formulación de controladores automáticos de sistemas dinámicos, dando cabida a una variedad de
problemas lineales sad la linealización de el modelo del sistema. El problema de
a vez formulad en términos de LMI puede ser resuelto de manera p por algoritmos de
optimización convexa basados en la técnica de
Históricamente las p

Capítulo 3 – Introducción al control robusto 31
)()( tAxtxdtd
=
Axx =& es estable (toda las trayectorias de converg
como solución a la desigualdad
(3.7)
ésta condición es conocida como la desigualdad de Lyapunov.
Definición 3.1 Una LMI es una restricción sobre un vector de la forma
(3.8)
donde
ctor de escalares desconocidos (variables de optimización o de decisión),
son matrices simétricas dadas y el símbolo ‘< 0’ indica que la condición es definida
cir, que el mayor autovalor de es negativo.
Observación 3.1 Hay que señalar que pueden tenerse desigualdades matriciales lineales no estrictas si
convexo sobre la variable
e a cero), si existe una matriz P definida positiva
0<+T PAPA0>= TPP
mRx∈
0)( <+= ∑m
FxFxF1
0=i
ii
),,,( 21 mxxxx L= es un ve
mFFF ,,, 10 L
negativa, es de )(xF
la desigualdad es del tipo 0≤ .
xUna LMI define un problema , que se puede resolver numéricamente con la
Un sistema de múltiples LMI’s puede ser considerado como una sola LMI Sin destruir la propiedad de
riables son matrices,
como p
garantía de encontrar, si existe, una solución.
convexidad.
( )
( )( ) ( ) ( )( )xA,,xAdiagxA
0xA
0xA
N
1
KM =⇔⎪⎩
⎪⎨
⎧
<
<
En control, las LMI’s no aparecen en forma natural sino en problemas donde las va
N1
or ejemplo el caso típico es la desigualdad de Lyapunov
0<+ PAPAT

Capítulo 3 – Introducción al control robusto 32
donde es dada y nxnRA∈ TPP =
P ,,1 K
es la matriz variable. La desigualdad se trasforma en la ecuación
para matrices simétricas de tamaño , (3.8) tomando como base mP nxn )2/)1(( += nnm
uto más eficiente.
y
y . De esta forma se logrará un cómp
Problemas de las LMI’s
Los problemas de optimización convexa poseen la propiedad de que un óptimo local corresponde a un
as son formulados como problemas de
Programación Semi-Definida (SDP), una clase de problemas de optimización convexa en la cual la
ue sigue se presentan
los tres problemas de la optimización convexa (Boyd et al., 1994).
1. Problema de Factibilidad:
asumiendo que 00 =F Ti APiPAF i−= −
óptimo global. En la teoría de control robusto, los problem
función objetivo es lineal y las restricciones están formuladas como LMI’s. En lo q
( ) 0>xF
Dada la desigualdad matricial lineal ( ) 0>xF , el correspondiente problema LMI (LMIP) es encontrar
feasx 0)( >feasxF tal que
2. Minimización de una función Lineal:
Encontrar una solución
, o determinar que el LMI es factible.
x tal que:
olución
{ 0)(min
>xFasujetoxcT
3. Minimización de autovalores generalizados:
Encontrar la s x que permita:
⎩⎨⎧
>>−
0)(,0)(
a sujeto
min
xBxAIλ
λ
diversas herramientas
Como ya se menciono, la búsqueda de la solución numérica para estos problemas representa un
problema de Programación Semi-Definida (SDP). En la actualidad,

Capítulo 3 – Introducción al control robusto 33
comput s han sido das para solventar dichos problemas, entre los cuales pueden
mencionarse:
Algoritmo de punto i el problemas de optimización convexa, gracias al cual
acionale proba
nterior para resolver
se torna posible dar solución numérica a los LMI’s de forma más rápida y eficiente. Desde entonces,
alizado para desarrollar nuevos software para solucionar LMI’s, como
3.6 Algunos problemas LMI’s con soluciones analíticas
de forma especial e interpretaciones teóricas de
control. A continuación se describen brevemente algunos de estos resultados.
De an se conoce el esigualdad de Lyapunov, es decir:
0<+ PAPAT
muchas investigaciones se han re
el LMIlab en Matlab que usa el método de proyección (Nemirovskii y Gahinet., 1994) y el LMITOOL
del Scilab y Matlab que usan el método Primal-Dual desarrollado por (Vandenberghe y Boyd., 1994).
Además de estos dos métodos existen nuevos abordajes que buscan mejorar la eficiencia en
cuanto al tratamiento de sistemas extendidos. Para fines de esta investigación se usará el LMITOOL
para dar solución a los problemas LMI’s planteados en cada caso.
Existen soluciones analíticas a varios problemas LMI
Desigualdades de Lyapunov
te mano LMIP ( problema LMI), asociado a la d
,0>P
donde P es variable y nxnRA∈ es dada. Lyapunov demostró que este LMI es factible si y solo si la
matriz A es estable. Para sol r este LMIP, se escoge cualquier y se resuelve la ecuación de
Lyapunov , que no es más que un sistema de
uciona
Q−=
0>Q
2/)1PAPAT + ( +n
neales será resol
n
s li
ecuaciones lineales para las
uble y con resultado
El Lema Real Acotado
Considerando el sistema en lazo cerrado mostrado en (3.4) y su función de transferencia dada en (3.5).
Los siguientes enunciados son equivalentes:
i.
2/)1( +nn variables escalares en . Este sistema de ecuacioneP
en 0>P si y solo si la MI es factible. L
γ<∞
ii. Existe una matriz simétrica
)(sG con A estable.
P definida positiva tal que:

Capítulo 3 – Introducción al control robusto 34
0I
I T ≤⎥⎥⎥
⎦⎢⎣ −−
γγDC
DP (3.9)
La ecuación de Riccati asociado a ésta LMI es:
0)()I)(( T1T1T2T1T1T =+−++++ −−−− CDPBDDDCPBCCPAPA γγγγγ (3.10
,0T⎡ +
>
PAPA
P
T
T ⎤
⎢⎢ B
CPB
)
la cual es factible si hay una matriz TPP = como solución real.
La demotración de este lema puede verse en Sánchez y Sznaier (1998), para 1=γ y XP = .
Una característica interesente es que desigualdades matriciales (convexas) no lineales pueden
e Schur que se
puntualiza a continuación.
erramienta matemática que permite llevar las desigualdades
matriciales convexas no lineales a desigualdades matriciales lineales.
Lema 3.1 (Boyd et al., 1994) Dada las matrices P, Q, R y la matriz S definida como:
Las proposi
Para la matriz dual de (3.11)
(3.12)
ene:
ser convertidas a desigualdades matriciales lineales haciendo uso del complemento d
3.7 Complemento de Schur
El complemento de Schur, es una h
0>⎟⎠
⎞⎜⎝
⎛=
RQQP
S T (3.11)
ciones siguientes son equivalentes
⎟⎜
00 1 >−> − QPQRyP T
00 1 >−> − TQQRPyR
⎞⎛−
=QP
S 0<⎟⎟⎠
⎜⎜⎝ − RQT
se ti
0 1 −> − RQPQyP T 0<
00 1 <−> − PQQRyR T

Capítulo 3 – Introducción al control robusto 35
Observación 3.2 s involucradas son matrices que aparecen
en forma lineal en la desigualdad. Una vez escrita como una LMI, se puede invocar con certeza la
convexidad de la desigualdad (Col
Observación 3.3 Una vez descrita una LMI, existen herramientas de gran alcance en cuanto a la
resolución se refiere de tales problemas, como por ejemplo el ‘Toolbox de LMI’s de Matlab’, (Gahinet
emplo el del elipsoide (Winston, 1994) que aprovechan
la estructura particular de las LMI’s para su resolución (Colmenares y Tadeo,
com
Uno de
aneras mas utilizadas para atender los requerimientos de desempeño, pues
tenerse una idea del grado de influencia de las perturbaciones externas sobre la salida de interés.
mos a del sistema (señal de ruido, señal
de control, entre otras)
lo suficientemente ones.
onsidere el siguiente sistema LTI
⎩⎨ +=
+wDCxzwBAx
w
w (3.13)
con denotando el vector de estados, el vector de entradas de perturbación y
Se hace notar que en una LMI las variable
menares y Tadeo, 2005).
et al., 1995), que utiliza métodos como por ej
2005).
3.8 Norma de sistemas o LMI’s
los principales objetivos de control es el de alcanzar ciertas especificaciones de desempeño
además de garantizar la estabilidad interna. Ciertamente, la medida de energía de determinadas señales
de interés es una de las m
puede
Recordando que:
i. Las perturbaciones consisten en disturbios externos y ruidos de medición. ii. Los componentes de la inconsistencia del desempeño son todas las señales que desea
controlar o que suministran alguna información para la dinámic
El objetivo que se plantea resolver en esta sección es verificar si la variación del desempeño se mantiene
pequeña en presencia de perturbaci
C
⎧ =x&
nRx∈ rRw∈ qRz∈ el
gún Trofi el operador perturbaci
por tanto, el desempeño del sistema depende del tamaño del operador entre , que será
denotada por
vector de salidas de interés. Se no (2000), Para este sistema ón/salida de
interés wzG esta dado por:
wwwz DBAsICG +−= −1)(
)()( tzytw
wzG

Capítulo 3 – Introducción al control robusto 36
¿Cómo se mide el tamaño de este operador? Las dos maneras más comunes y con significado
físico para cuantificar el tamaño del sistema son las normas ∞HyH 2 . En lo que sigue serán
presentadas tales definiciones para sistemas lineales invariantes en el tiempo (LTI). Por esta razón, se va
ocida, es posible
xcitado por un impulso, luego esta dinámica
puede ser incorporada al operador . De esta forma, se puede considerar que este sistema es
Para la definición de la norma , la energía de la señal será finita si se asume
a mostrar primero la clase de sistema a ser considerado.
Norma 2H
Cuando las perturbaciones que afectan el sistema son señales de forma con
representarlas como la salida de un sistema dinámico e
)(sGwz
excitado por señales )(tw impulsionales y definir la norma 2H de )(sGwz como la energía de la
respuesta al impulso que es la energía de la señal de salida de )(tz .
2H )(tzObservación 3.4
que el sistema (3.13) es estrictamente propio y estable, es decir, la matriz A es Hurwitz y 0≡wD . A
efinición 3.2 (Norma de sistemas)
da como:
continuación se formalizará este concepto.
D 2
La norma 2H del operador entrada/salida, )(sGwz es defini
H
∫∞
=owz dttgtgtrazaG )]()'([
2 (3.14)
donde es la respuesta impulsional del sistema (3.1)(tg 3) con A es Hurwitz, 0≡wD y 0)( =tg para
0<t<∞− .
La norma de sistema esta relacionada con el criterio de estabilidad de Lyapunov (3.4.3).
a través de condiciones LMI. Considerando la
condición de estabilidad de Lyapunov (3.6) para sistemas lineales invariantes en el tiempo rescrita de la
manera siguiente.
2H
Esta relación nos permite calcular la norma )(sGwz
Dada una matriz QPAPAPPQQ −=+>=∃>= ':0'0' (3.15)

Capítulo 3 – Introducción al control robusto 37
la solución para la expresión (3.15), es dada por
dtQeeP AttA∫∞
=0
' (3.16)
En la definición (3.2) de la norma , el operador entrada/salida tiene la forma
y su respuesta impulsional es dada por . Entonces, se puede
2H
wwz BAsC 1)( −− wAt BCetg =)(IsG )( =
escribir
⎥⎦⎤
⎢⎣⎡ ⎟
⎠⎞⎜
⎝⎛==
∞∞
wo
AttAwo w
AttAwwz BdtCeCeBtrazadtBCeCeBtrazaG '']''[ ''
2
note que el termino ∫oAttA dtCeCe '' , conocido como el gra ian
∫∫
mm o de observabilidad, es una solución
para la ecuaci
∞
ón de Lyapunov (3.6) con 0' ≥= CCQ . Luego, la norma puede determinarse por: 2H
[ ]BPtrazasG ')( 2
2= (3.17)
donde P es la solución de la ecuación '
wowwz B
o 0' =++ CCAPooPA .
])'()([)]()'([ ththtrazaththtraza =La conmutatividad de la función traza ( ), nos permite calcular la
versión dual de la norma H por el grammia2 no de controlabilidad de la siguiente manera:
]'[' CCPtraza=⎤ (3.18) ')( '2
2CdteBBeCtrazasG co
tAww
Atwz ⎥⎦⎢⎣
⎡ ⎟⎠⎞⎜
⎝⎛= ∫
∞
Donde es la solución de la ecuación cP 0'' =++ wwcc BBAPAP .
La determinación de la norma puede ser fácilmente obtenida a través de un problema de
optimización convexa. Por onsiderando el grammiano de observabilidad si satisface la
2
o
ecuación oo y existe una matriz
H
ejemplo, c P
0<0'' =++ CCAPPA '':0' ++>= CCPAPAPP
a mediante la resoluci
entonces
oPP > . Por lo tanto la norma 2H puede ser calculad
n forma de LMI
ón del siguiente problema
de optimización e

Capítulo 3 – Introducción al control robusto 38
⎩ <++ 0'' CCPAPA⎨⎧ >=
<0'
:])'[(min2
PPPBBtrazaGwz (3.19)
donde la diferencia de estimación y el verdadero valor es tan pequeña como se quiera.
Norma
a está asociada a la mayor ganancia que puede existir de alguna de las entradas para algunas de
las salidas, a lo largo de todo el espectro de la señal, esto es, ella cuantifica el mayor incremento de
energía que puede ocurrir entre las entradas y salidas de un determinado sistema. En lo que sigue se
presenta una definición más formal.
ma )
Considere el sistema (2.34). La norma del operador entrada/salida, es el valor supremo
entre la energía de las señale de energía limitada
2
∞H
Esta norm
Definición 3.3 (Nor
w
∞H
∞H
s de salida y entrada, para todo
)(sGwz
2
2
02
supwz
Gw
wz
≠∞= (3.20)
emo es calculado para todas las trayectorias no nulas del sistema (3.13) con 0)0( =x
ión de
donde el supr , en
el caso escalar, la norma de un sistema LTI coincide con la máxima ganancia de la func
De la misma forma que el caso , se utiliza la ecuación de Lya
numéricamente el valor de la norma de sistemas.
C
∞H
transferencia en todo el espectro de frecuencia.
2H punov para calcular
∞H
Pxxxv ')( =onsidere que existe una función de Lyapunov cuadrática , para el sistema (3.13)
0>γy un escalar tal que:
0'')( 2 (3.21) <−+ wwzzxv γ&
0)0( =xIntegrando la expresión anterior de 0 a T, con , se tiene que:
implica que
∫ <−=T
dtwwzzTx0
en vista de que 0))(( ≥Txv , esto
v 2 0)''())(( γ

Capítulo 3 – Introducción al control robusto 39
2
2
wz
≥γ
El valor mínimo de γ que satisface (3.21) es la norma del sistema (3.13)
ue
∞H
Debido a q v PxBwxPAPAxx w''2)'(')( ++= wDCxz w+=& y , la expresión (3.21) se torna:
(3.22)
iente problema de optimización
Al momento de tomar en cuenta la ubicación de polos como requisito de desempeño del sistema en
también puede formularse como un problema de
desigual
0)'(')''('2)''(' 2 <−+++++ wIDDwxCDPBwxCCPAPAx rwwww γ
la expresión anterior en términos del vector auxiliar ]'[ wx puede ser descrito de la siguiente manera:
'''''
⎤⎢⎣
⎡ +++⎥⎦
⎤⎢⎣
⎡B
DCPBCCPAPAwx
0'' 2 <⎥
⎦−+ IDDCDP wwww
ww
γ
Luego, la norma puede ser determinada por el sigu∞H
0'''0'
:min 2 <⎪⎨⎧
⎤⎡ +++>=
DCPCCPAPAPP
wwγ ''' 2⎪⎩
⎥⎦
⎢⎣ −+ IDDCDPB
B
wwww γ
estudio, se cuenta con las regiones LMI para ubicación de polos.
3.9 Regiones LMI´s para la ubicación de polos
La ubicación de polos en regiones convexas
dades matriciales lineales (LMI’s) en la matriz de Lyapunov P , siempre que la región pueda
describirse como una región LMI y qu e manera forme d al es definida como:
3.4 (Chilali y Gahinet 1996) Una región LMI es cualquier región convexa R que pueda
describirse de la forma:
Definición
}0{ <+∈ MzzMzR = : +LC
Donde y TLL = M son matrices constantes reales de las mismas dimensiones.

Capítulo 3 – Introducción al control robusto 40
Es posible obtener condiciones que permitan modificar el comportamiento temporal de las
respuestas de los sistemas, garantizando la ubicación de los polos a lazo cerrado en regiones del plano
s
emiplano a izquierda de
, como se señala a continuación.
0x S
:{ ∈= zCzR }02 0 <++ xz
Figura 3.12: Semiplano a la izquierda de x0.
Semiplano a la derecha de 0x
}02:{ 0 >++∈= xzzCzR
n cero.
Figura 3.13: Semiplano a la derecha de x0.
Cono con vértice e
⎪⎬
⎪⎨ <⎟⎟
⎠+−= 0
)(sin)cos zzzzzR
θ
⎭
⎪⎫
⎩
⎪⎧ ⎞⎜⎜⎝
⎛ −+∈
()(cos)(sin: zzzzC
θθθ
Im(s)
X0 Re(s)
Im(s)
X0
Re(s)

Capítulo 3 – Introducción al control robusto 41
Im(s)
Figura 3.14: Cono centrado en cero.
Región circular centrada en α− y de radio r
⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
<⎟⎟⎠
⎞⎜⎜⎝
⎛
−++−
∈= 0rαzαzr:CzR
Figura 3.15: Circunferencia centrada en α− y de radio r
Banda vertical 21 hxh <<
⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
<⎟⎟⎠
⎞⎜⎜⎝
⎛
++−+−
∈= 0)(20
0)(2:2
1
zzhzzhCzR
Figura 3.16: Banda vertical 21 hxh <<
Re(s)
Im(s)
Re(s) r
−α
Im(s)
h1

Capítulo 3 – Introducción al control robusto 42
El siguiente teorema establece la re
una región LMI y esa región.
Teorema 3.1
lación entre la ub n de polos – autovalores de una matriz A- en
Una matriz A tiene todos sus autovalores en una región LMI de la forma
icació
{ }0: <++∈= TMzzMLCzR ; Si y solo si existe una matriz tal que:
La expresión anterior también pu ;
0>X
0)()( <⊗+⊗+⊗ TT AXMAXMXL
mlkT
lk XAM ≤≤ ,1)ede escribirse como klkl AXMXl ++(
Donde )( klkl Ml es el elemento kl de la matriz )(ML y k ml ≤≤ ,
en Chilali y Gahinet (1996).
1 indica los valores de y entre
y .La demostración puede encontrase
Observación 3.4 Con el teorema anterior y teniendo en consideración la región a ser usada al
momento del diseño de los controladores se tendrá: La región del semiplano a la izquierda de esta
definida como
k l
1 m
0x
}02:{ 0 <++∈= xzzCzR ; haciendo uso del Teorema 3.1 se obtiene la siguiente
notación para dicha región:
Con y
02 0 <++ XxXAAX T
00 <x XP = el LMI será descrita como:
(3.22) 02 0 <−+ PxPAAP T

Capítulo 4
Síntesis de controladores robustos H2 y H∞ como
LMI’s
ubicación de polos, cota para el valor de las norma y según sea el caso, etc.). Acá, serán
mostradas las normas y como sistema de desigualda ales así como también el diseño de
ctor de estados, realimentación estática de la salida y al final del
capítulo será presentado un resumen del mismo con las acotaciones más importantes para el diseño de
4.1 Reali ector de estad
Considere el siguiente sistema lineal invariante en el tiempo:
(4.1)
donde es el vector de estados, son las perturbaciones externas,
Este capítulo está consagrado al diseño de controladores robustos para sistemas lineales e invariantes en
el tiempo a los que se impondrán múltiples objetivos para su desempeño en lazo cerrado (estabilidad,
∞
2
controladores por realimentación del ve
s 2H H
des lineH ∞H
los controladores a estudiar.
mentación del v os
⎩⎨⎧
++=++=
uDwDxCzuBwBAxx
zuzwz
uw&
nRx∈ rRw∈ qRz∈ son las salidas
son las en .
Suponga que todos los estados del sistema (4.1) son medibles, sea
manipuladas y pRu∈ tradas de controlpxnRK ∈ la matriz de
realimentación de estados, o sea . El sistema en lazo cerrado queda de la forma:
(4.2)
Kxu =
⎩⎨⎧
++=++=
wDxKDCzwBxKBAx
zwzwz
wu
)()(&

Capítulo 4 – Síntesis de controladores robustos 2H y ∞H como LMI’s 44
En esta sección se considera el problema de síntesis de una realimentación del
vector de estados, es decir, interesa una matriz de ganancia
de controladores a través
K para el sistema (4.2) de modo que
pueden ser satisfechas ciertas propiedades y especificaciones de desempeño.
El problema es determinar una matriz de ganancias K tal que el sistema (4.2) no forzado ( 0≡w ), sea
cuadráticamente estable. Según Trofino (2000), utilizando el criterio de estabilidad de Lyapunov
'
descrito en el apartado (3.4.3), puede ser determinada esta matriz que satisface el siguiente LMI
>=∃ PP 0'''0)()'(:0 <+++⇔<+++ KPBPBKPAPAKBAPPKBA uuuu (4.3)
note que la condición descrita en (4.3), denominada Primal, no es lineal en . A continuación se
verá como linealizar esta ecuación matricial en las formas Primal y Dual.
existe una matriz cualquiera
KyP
Versión Primal
En este abordaje se utiliza una restricción de igualdad para linealizar la expresión (4.3). Suponga que
M , tal que MBPB uu = , de esta forma puede rescribirse la expresión
(4.3) como:
⎪⎧ > 0P
⎪⎩
⎨<+++
==∃0''''
:'MKBBMKPAPA
MBPBPP
uu
uu
Ahora considere que existe una matriz X tal que MKX = . El problema de estabilización cuadrática
liza el sistema es dada por
tiene solución en la forma Primal si:
⎪⎩
⎪⎨
⎧
<+++=>
=∃0'''
0:,'
XBBXPAPAPB
PXPP uu MB (4.4)
uu
En caso afirmativo, la matriz de ganancia que estabi XMK 1−=
Versión Dual
Considere que existe una matriz IPQ QQ => :0' . Multiplicando la inecuación ma= tricial dada en
(4.3) a la derecha y a la izquierda por Q , se obtiene:
0''' <+++ KQBBQKAQQA uu

Capítulo 4 – Síntesis de controladores robustos 2H y ∞H como LMI’s 45
Entonces se asume que existe una matriz Y tal que KQY = . El problema de estabilización cuadrática
tiene solución en la forma Dual si:
⎧ > 0Q
⎩⎨ <+++
=∃0'''
:,'YBBYAQQA
YQQuu
(4.5)
4.2 Realimentación de la salida
or rea
al caso de controladores por
ctor de estados.
Considerando el sistema LTI representado en variables de estado (4.1). Una condición
Realimentación estática de la salida
Según Trofino (2000), la forma más sencilla de diseñar controladores por realimentación de la salida es
ésta, y consiste en encontrar una matriz de ganancia
En caso afirmativo, la matriz de ganancia que estabiliza el sistema es dada por 1−= YQK
Se describe aquí, una solución para el problema de síntesis de controladores p limentación estática
de la salida, vía el abordaje LMI. Los resultados obtenidos se reducen
realimentación del ve
necesaria para que el problema de estabilización tenga solución, es que el par ),( BA sea estabilizable y el
par ),( CA sea detectable. (Chen, 1984)
K tal que la ley de control estabiliza el
aciones de diseño.
n LMI correspondiente con este tipo de controlador, el abordaje
será enfocado en la condición de estabilidad de la planta y será asumido que el sistema (4.1) esta exento
de perturbaciones por lo que se partirá de la siguiente representación en
Kyu =
sistema (4.1), y satisfaga algunas especific
Para encontrar la formulació
espacio estado.
CxyBuAxx
=+=&
(4.6)
El sistema en lazo cerrado es:
CxyxBKCAx
=+= )(&
Para que el sistema sea cuadráticamente estable debe satisfacerse la condición de Lyapunov (3.4.3), así
se tienen que encontrar matrices y 0>P K tal que:
Pxxxv ')( =

Capítulo 4 – Síntesis de controladores robustos 2H y ∞H como LMI’s 46
0)'()( <++= xPBKCCPAPAxxv T&
note que la ecuación anterior n
'''+ PBK
o es convexa en , y que imposibilita la utilización de
herramientas computacionales existentes, para limitar este problema, se ut
mostrado en Crusius y Trofino (1999), que crea un problema auxiliar convexo que sí se torna factible,
se obtiene las siguientes
ondiciones, dadas por el Teorema 4.1.
te estable por una ley de control del tipo
),( KP
ilizará el Problema-P
el problema original también lo será. Haciendo uso de éste (Problema-P), n
c
Kyu =Teorema 4.1 El sistema (4.7) será cuadráticamen , si
existen matrices 0>P , M y Y tal que:
PBBYCBYCPAPA
= BM<+++ 0''''
(4.7)
en caso de encontrarse dichas matrices, la ganancia de realimentación esta dado por YMK 1−= y
Pxxxv ')( = es una función de Lyapunov para el sistema.
En vez de hacer uso del abordaje primal se puede considerar el abordaje dual (el cual es usado
ta dado en el Teorema 4.2 y utiliza la versión dual del
Problema-P, denominado Problema-W (Crusius y Trofino, 1999).
ta del tip
para fines de esta investigación). Este resultado es
Teorema 4.2 El sistema (4.6) será cuadráticamente es ble por una ley de control Kyuo = , si
existen matrices 0>Q y Y tal que:
KCYQ
BYBYQAAQ=
<+++−1
0''' (4.8)
La ganancia de realimentación para el caso afirmativo esta dado por y
, con es una función de Lyapunov
ser interpretados para sistemas con incertidumbre de tipo politópica de
forma semejante al caso de realimentación de estados resolviendo las LMI en (4.7) para los vértices de
la región
11 )'(' −−= CCCYQK
Pxxxv ')( = 1−= PQ para el sistema.
Los resultados pueden
. Note que las matrices y C B
a
δβ no pueden ser inciertas conjuntamente, pues el problema
l c l que la matriz
se torna no convexo. Por eso, debido a la restricción de igualdad, es mas conveniente en el caso primal
que la matriz C sea incierta y no e duaso B sea incierta.

Capítulo 4 – Síntesis de controladores robustos 2H y ∞H como LMI’s 47
4.3 Control 2H
El problema es determinar la matriz de ganancia K que estabiliza el sistema (4.2) y minimiza la norma
2H del sistema
Buscando obtener una formulación convexa al problema de control 2H , se usará la
determinación de esta norma por el grammiano de controlabi
como . Según Trofino (2000), la norma de este sistema puede do por el
(4.9)
como en
inecuación m tilizadas las siguientes relaciones.
lidad. Considere el sistema (4.2),
ser determina0≡D 2Hzw
siguiente problema de optimización.
{ }⎩⎨⎧
<++++>=
++0')'()(
0':])'()[(min
uzuzzuz BBKBAPPKBA
PPKDCPKDCtraza
wwu
La condición anterior presenta términos no convexos, tanto en la función objetivo, la
atricial. Para linealizar dicha expresión, serán u
KPYKDCPKDCW zuzzuz
=++≥ )'()(
Aplicando el complemento de Schur en (Lema 3.1), y teniendo en consideración la expresión anterior,
puede obtenerse una relación convexa para la determinación de la norma bajo estudio (Norma ) que
ealim a ados
Tomando en cuenta el sistema (4.2 n
2H
será presentada a continuación.
Control 2H - R ent ción de est
atriz P simétrica, definida positiva, y 0≡zwD .) co Si existe una m
•
matrices YW , satisfaciendo el siguiente problema de optimización
⎪ ≥⎥⎤
⎢⎡
+0zuz
⎪⎪⎩
⎨<⎥
⎦
⎤⎢⎣
⎡−
+++⎦⎣
0'
)'''(:)(min zuz
IBBBYYBPAAP
Wtraza (4.10)
Entonces, se puede afirmar que
El sistema es estabilizable para la ley de control Kxu
⎪
⎧ +'''
)(
rw
wuu
PDYPCYDPCW
= ; con 1−= YPK
• La norma H del sistema esta dada por 2 )(WazaG <2
trwz
La demostración de esto aparece en (Rosales, 2003) y no será repetida aquí.

Capítulo 4 – Síntesis de controladores robustos 2H y ∞H como LMI’s 48
Comentario: con elacr ión a la escogencia de las matrices y se pueden hacer los siguientes
comentarios. Note que
zC zuD
dtuDxCuDxCzdtzz zuz
T
zuz
T)(')('
00
2
2++== ∫∫
Si escogemos zC y zuD tal que
0' =uzzDC
Se tendrá
2
2
2
2
2
2uDxCz zuz +=
Como el problema es minimizar 2
z , entonces, la ley de control debe minimizar la variación de
esto, se
aumenta la energía del término . Típicamente se tiene un compromiso entre el esfuerzo de
control (representado por ) y la rapidez de los modos (representados por ). Cuanto menor va
Control - Realimentación estática de la salida
El caso de realimentación estática de la salida se reduce a resolver el caso de realimentación de estado,
xCz tornando más rápidos los modos del sistema realimentado que afectan esta variable. Por otro lado,
el esfuerzo de control consumido para acelerar estos modos no puede ser excesivo, por
uDzu
uDzu xCz
uDzu en relación a xCz , más rápidos serán los modos del sistema y mayores serán las ganancias de
realimentación.
2H
en otras palabras:
Tomando en cuenta el sistema (4.2) con 0≡zwD . Si existe una matriz Q simétrica, definida
positiva, y matrices satisfacie ón
(4.11)
ontrol
YW , ndo el siguiente problema de optimizaci
⎪⎪⎩
⎪⎪⎨
⎧
<⎥⎦
⎤⎢⎣
⎡−
+++
≥⎥⎦
⎤⎢⎣
⎡+
+
0'
)'''(
0'''
)(
:)(min
rw
wuu
zuz
zuz
IBBBYYBPAAP
QDYQCYDQCW
Wtraza
Entonces, se puede afirmar que
; con 1222
1 )'(' −−= CCCYQ Kyu = K• El sistema es estabilizable para la ley de c

Capítulo 4 – Síntesis de controladores robustos 2H y ∞H como LMI’s 49
)• La norma 2H del sistema esta dada por (2
WtraGwz <
za
4.4 Control
riz de ganancia
∞H
KEl problema es determinar la mat que estabiliza el sistema (4.2) y minimiza la norma
gún Trofino (2000), La determinación de la norma por el abordaje Dual permite la
obtención de una formulación convexa para este problema de control.
La norma del sistema (4.2) es dada por el siguiente problema de optimización:
ser
∞H
∞H Se
∞H
⎪⎩
⎨
⎧
<⎥
⎥
⎦⎢
⎢
⎣ −+−
>=
0)(
''
0'
:min 22
IDQKDCDIB
zwzuz
γγ (4.12)
La expresión (4.12) puede linealizada por un cambio de variable KQY
⎪
⎪⎪
⎥
⎤
⎢
⎡ ++++ )'()()'( KDCQBQKBAKBAQ
zww
zuzwuu
= . próxima subsección
n para el problema de control ∞H por realimentación de estados Kxu
La
presenta una formulació = al
igual que para el problema de control Kyu = .
Control - Realimentación de estados ∞H
Considere el sistema (4.2). Si existen matrices 0'>= QQ , Y y un escalar 0>γ , satisfaciendo el
siguiente problema de optimización
(4.13)
Entonces, se puede afirmar que
• El sistema es estable para la ley de control
⎪⎩
⎪⎨ <
⎥⎥⎥
⎦⎢⎢⎢
⎣ −+0
)(
)':2
IDYDQC
B
zwzuz
zuzwuu⎧ ⎤⎡−
++++''
)'''(''(min 2 DIB
DYQCBYYBQAAQ
zww γγ
Kxu = ; con
• La norma del sistema es dada por
1−= YQK
∞H γ<∞wzG

Capítulo 4 – Síntesis de controladores robustos 2H y ∞H como LMI’s 50
Control ∞H - Realimentación estática de la salida
Análogo al caso anterior, las LMI’s para el caso realimentación estática de la salida teniendo en
) con 0≡zwD . Son satisfechas si existen matrices y 0'>= QQ Ydeferencia al sistema (4.2 , tal que el
(4.14)
Entonces, se puede afirmar que
• El sistema es estabilizable para la ley de control
siguiente problema de optimización sea factible:
⎪⎩ ⎥
⎥⎢⎢ zww⎪⎨
⎧<⎥
⎦
⎤⎢
⎣
⎡
−+−
++++0
)(''
)'''()'''(:min 22
IDYDQCDIB
DYQCBBYYBQAAQ
zwzuz
zuzwuu
γγ
Kyu = ; con
• La norma del sistema esta dada por
1222 )'(' −= CCCYQK
1−
∞H γ<∞wzG
La demostración de éste caso puede ser vista en Rosales (2003).
4.5 Resumen para el controlador
a nula y
(4.15)
el conjunto e
Para el caso realimentación del vector de estados:
2H
Para los casos donde se calcula la norma 2H la matriz D será asumid habrá equivalencia entre
los sistemas:
⎪⎧
=+=xCz
uBAxx u&
⎪⎩
⎪⎨⎧
==
++=≡⎨
+
xCyxCz
uBwBAxxBwz
w
2
1
21&
⎪⎩ = Cxy
Razón por la cual para la síntesis de controladores, d LMI a resolver en cada caso será:
Kxu =
0)
0
0'
)'''(
1
1
122
><
≥⎥⎦
⎤⎡
<⎥⎦
⎤⎢⎣
⎡−
+++
Q
QCW
IBBBYYBQAAQ
r
γ'1
⎢⎣ QQC
(Wtraza
(4.16)
on 1−= YQK C

Capítulo 4 – Síntesis de controladores robustos 2H y ∞H como LMI’s 51
La norma H el sistema deberá cumplir: d )(2
WtrazaGwz <2
Región para ubicación de polos (semiplano a la izquierda de 0x )
02''' 022 <−+++QAQ QxBYYBA (4.17)
Para el caso realimentación estática de la salida: Kyu =
0)(
0'
0'
)'''(
1
1
122
><
≥⎥⎦
⎤⎡
<⎥⎦
⎤⎢⎣
⎡−
+++
QWtraza
QQCQCW
IBBBYYBQAAQ
r
γ
1⎢ (4.18) ⎣
Con 1222
1 )'(' −−= CCCYQK
)(La norma 2H del sistema deberá cumplir: 2
Wtrazawz
Región para
G <
ubicación de polos (semiplano a la izquierda de ) 0x
02'''' 02222 <−+++ QxYCBBYCQAAQ (4.19)
4.6 Resumen para el controlador
de
este controlador son:
∞H
Teniendo presentes la equivalencia descrita en la sección 4.5, El conjunto de LMI’s para el diseño
Kxu =Para el caso realimentación del vector de estados:
0
0''''''
111
112
1
1122
>
<⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−
+++
QIDQC
DIBQCBBYYBQAAQ
γ (4.20)
Con
La norma del sistema deberá satisfacer:
1−= YQK
∞H γ<∞wzG
Regi bón para u icación de polos (semiplano a la izquierda de ) 0x

Capítulo 4 – Síntesis de controladores robustos 2H y ∞H como LMI’s 52
02'' 022'++ BQAAQ <−+ QxBYY (4.21)
Para el caso realimentación estática de la salida: Kyu =
0''''''
111
112
1
1122
<⎥⎥⎥
⎦⎢⎢⎢
⎣
⎡
−−
+++
IDQCDIBQCBBYYBQAAQ
γ
⎤
0>Q
(4.22)
Con
La norma del sistema deberá satisfacer:
1222
1 )'(' −−= CCCYQK
∞H γ<∞wzG
Región para ubicación de polos (semiplano a la izquierda de ) 0x
02'''' 02222 <−+++ QxYCBBYCQAAQ (4.23)
Ejemplo ilustrativo 4.7
Considere el sistema incierto descrito por:
[ ][ ]xy
xz
6687.08507.0
01
−−=
=
uwxx6687.01618.10 ⎥
⎦⎢⎣
+⎥⎦
⎢⎣
+⎥⎦
⎢⎣ −
=δ
&
rto, de él solo se sabe que tiene un rango de variación para con un
que
5257.000618.0 ⎤⎡−⎤⎡⎤⎡
El parámetro a es incie ]31[∈a
Avalor nominal de 20 =a respectivamente, por lo cual, se dice pert
politópico
enece a un conjunto
δβ . En primer lugar deben hallarse los vértices de dicho politópo, pa
diseñar los controladores. Recordando la condición descrita en (3.2)
Y sabiendo además, que para n parámetros inciertos se requieren calcular vértices. El procedimiento
ra en base a ellos,
⎭⎬⎫
⎩⎨⎧
=≥== ∑∑==
r
iii
r
iiir yAAAAACo
111 10;)(|},,{ δδδδK
n2para tal acción es el siguiente:

Capítulo 4 – Síntesis de controladores robustos 2H y ∞H como LMI’s 53
21 618.10618.10 ⎦⎣ −⎦⎣ − aa0618.00618.0
)( δδδ ⎥⎤
⎢⎡
+⎥⎤
⎢⎡
=A ;
Con 1,5 −== aa .
Las ecuaciones a evaluarse surgen de la expresión (3.2) y se muestran a continuación
021
21 1
aaa =+
=+
δδ
δδ
Resol ecviendo el sistema de uaciones se obtuvieron los siguientes resultados (ver Apéndice A
Ec_Introductorio1.m)
5.0;5.0 21 == δδ ;
121 =+δδ
Con lo que se cumple con las exigencias para la ecuación (3.2). Entonces, los vértices del politópo para
v lores
iδlos a obtenidos son:
Una vez obtenidos los vértices del politópo, se procede con el análisis de la controlabilidad y
observabilidad propuesto por Kalman (ver Apéndice A Ejemplo C_O_Introductorio.m). Para el
espectivo diseño de controladores.
21
2211
618.1010
618.103δδδ ⎥⎦
⎤⎢⎣ −
+⎥⎦
⎢⎣ −
=
)( δδδ += AAA618.00618.0
)(⎡⎤⎡
A
r
Controlador
Ejemplo 4.1: Controlador 2H con Kxu
2H
=
Dado la representación en espacio de estado del sistema lineal invariante en el tiempo sometido a
incerteza de tipo politópica propuesto en el apartado anterior. Se pide diseñar un controlador de la
forma que permita:
.-
Kxu =
.-Estabilizar el sistema en lazo cerrado y minimizar la norma H del sistema, es decir: 2
γ<2wzG , 100<γ para lograr factibilidad de las LMI’s.

Capítulo 4 – Síntesis de controladores robustos 2H y ∞H como LMI’s 54
Solución: En primer luga an las condiciones para la existencia del controlador, es decir,
deben estudiarse la controlabili observabilidad del sistema (ver Apéndice A Ejemplo
e tanto los vértices, como la matriz nominal del
sistema incierto cumplen ser completamente controlable y completamente observable (puesto que el
esto, asumiendo que la matriz
r, se consider
dad y
0
C_O_Introductorio.m), cuyos resultados revelan qu
rango de las matrices encontradas se corresponden con el número de estados del sistema), además de
=D
), se dan por satisf
para que la norma sea finita y que todos los estados del
sistema son medibles ( echas las condiciones para la existencia del controlador.
Toolbox de Matlab (ver Apéndice A Ejemplo41.m). En lo que sigue se
muestran los resultados obtenidos.
2H
IC =2
Para el diseño del controlador se usaron las LMI’s descritas en (4.16) para cada vértice y para
resolverlas se hizo uso del
γ (gamma) 50.3091
2wz 0.1503 G
)(Wtraza 6.9229
Matriz de ganancia K [6.1517 1.8443]
Ubicación de Polos
Lazo Abierto Lazo Cerrado
=1λ -1.6180 =1λ -1.5003 + 2.1640i
=2λ 0.6180 =2λ -1.5003 - 2.1640i
Tabla 4.1: Resultados obtenidos para -sistema incierto- con
ntos de iseño fueron satisfechos, el sistema fue estabilizado, la
norma del sistema en lazo cerrado cumple ser menor que
2H Kxu =
La Tabla 4.1 refleja que los requerimie d
2H γ y a su vez, menor que la raíz cuadrada
de la traza de W . En este sentido, se concluye que el controlador hallado estabiliza internamente el
sistema y minimiza el efecto del ruido a la salida del mismo.

Capítulo 4 – Síntesis de controladores robustos 2H y ∞H como LMI’s 55
Ejemplo 4.2: Controlador 2H con Kxu = y ubicación de polos
Dado la representación en espacio de estado del sistema lineal invariante en el tiempo sometido a
incerteza de tipo politópica propuesto en la sección 4.7. Se pide diseñar un controlador de la forma
Kxu = que permita:
.-Estabilizar el sistema en lazo cerrado, tal que los polos estén ubicados a la izquierda de -5 y
minimizar la no del sistema, es decir:
.-
rma 2H
γ<2wzG , 5<γ para lograr factibilidad de las LMI’s.
directamente con su diseño. Para ésto, se usaron las LMI’s descritas en (4.16), (4.17) para cada vértice
y para resolverlas se hizo uso del Toolbox de Matlab (ver Apéndice A Ejemplo42.m). En lo que sigue se
muestran los resultados obtenidos.
Solución: Una estudiadas y satisfechas las condiciones para la existencia del controlador, se procede
γ (gamma) 4.0634
2wzG 0.3028
)(Wtraza 4.2395
Matriz de ganancia K [87.7421 41.5426]
Ubicación de Polos
Lazo Abierto Lazo Cerrado
=1λ -1.6180 =1λ -9.6733 + 6.3958i
=2λ 0.6180 =2λ -9.6733 - 6.3958i
Tabla 4.2: Resultados obtenidos para H -sistema incierto- con Kxu2 = y ubicación de polos
La Tabla 4.2 refleja que los requerimientos de diseño fueron satisfechos, el sistema fue estabilizado de
manera que sus polo al cerrar el lazo de control se encuentran a la izquierda de -5, la norma del
stema en lazo cerrado cumple ser menor que
2H
γ si y a su vez, menor que la raíz cuadrada de la t raza de

Capítulo 4 – Síntesis de controladores robustos 2H y ∞H como LMI’s 56
W . En este sentido, se concluye que el controlador hallado estabiliza internamente el sistema y
minimiza el efecto del ruido a la salida del mismo.
Ejemplo 4.3: Controlador 2H con Kyu =
Dada la representación en espacio de estado del sistema lineal invariante en el tiempo sometido a
umbre de tipo ince
forma
rtid politópica propuesto en la sección 4.7. Se pide diseñar un controlador de la
.- zar la norma del sistema, es decir:
u Ky= que permita:
Estabilizar el sistema en lazo cerrado y minimi 2H
γ<2wzG 10<γ.- , para lograr factibilidad de las LMI’s.
Apéndice A Ejemplo43.m). Cuyos resultados obtenidos fueron:
Solución: una vez satisfechas las condiciones para la existencia del controlador (estudiadas en el
Ejemplo 4.1), se procede directamente al diseño del controlador propuesto. Para esto, fue usado el
conjunto de LMI descrito por en las ecuaciones (4.18), (4.19) para cada vértice y para resolverlas se
hizo uso del Toolbox de Matlab (ver
γ (gamma) 5.8789
2wzG 0.4734
)(Wtraza 2.1533
Matriz de ganancia K [-5.5229]
Ubicación de Polos
Lazo Abierto Lazo Cerrado
=1λ =1λ -1.6180 -0.5001 + 2.8558i
=2λ =2λ 0.6180 -0.5001 - 2.8558i
Tabla 4.3: Resultados obtenidos para 2H -sistema incierto- con Kyu =
De nuevo, se observa que las especificaciones de diseño son satisfechas. Por lo que se concluye que el
controlador diseñado estabiliza internamente el sistema y minimiza el efecto del ruido a la salida del
mismo.

Capítulo 4 – Síntesis de controladores robustos 2H y ∞H como LMI’s 57
Ejemplo 4.4: Controlador 2H con Kyu = y ubicación de polos
Dada la representación en espacio de estado del sistema lineal invariante en el tiempo sometido a
certidumbre de tipo politópica propuesto en la sección 4.7. Se pide diseñar un controlador de la
.-
in
forma Kyu = que permita:
.-Estabilizar el sistema en lazo cerrado, tal que los polos sean ubicados a la izquierda de -0.5 y
minimizar la norma 2H del sistema, es decir:
2wzG γ< , < 100γ para lograr factibilidad de las LMI’s.
Solució Una vez ha sido es para la existencia del controlador
studiadas en el Ejemplo 4.1), se procede directamente al diseño del controlador propuesto. Para lo
n: n tudiadas y satisfechas las condiciones
(e
cual, fue usado el conjunto de LMI descrito por en las ecuaciones (4.18), (4.19) para cada vértice y para
resolverlas se hizo uso del Toolbox de Matlab (ver Apéndice A Ejemplo 44.m). Cuyos resultados
obtenidos fueron:
γ (gamma) 50.8258
2wzG 1.0899
)(Wtraza 7.0340
Matriz de ganancia K [-32.1995]
Ubicación de Polos
Lazo Abierto Lazo Cerrado
=1λ =1λ -0. -1.6180 5009 + 7.3202i
=2λ =2λ 0.6180 -0.5009 - 7.3202i
cierto- con Kyu = y Tabla 4.4: Re btenidos para -sistema in2Hsultados o ubicación de polos
Como se observa en la Tabla 4.4, las especificaciones de diseño son satisfechas. Por lo que se concluye
e el controlador diseñado estabiliza internamente el sistema y minimiza el efecto del ruido a la salida qu
del mismo.

Capítulo 4 – Síntesis de controladores robustos 2H y ∞H como LMI’s 58
Controlador ∞H
Ejemplo 4.5: Controlador ∞H con Kxu =
Dada la representación en espacio de estado del sistema lineal invariante en el tiempo sometido a
incertid de tipo politóumbre pica propuesto en la sección 4.7. Se pide diseñar un controlador de la
forma
.- r la norma del sistema, es decir:
u Kx= que permita:
Estabilizar el sistema en lazo cerrado y minimiza ∞H
γ<∞wzG 5<γ .- , para lograr factibilidad de las LMI’s.
Solución: Satisfechas las condiciones para la existencia del controlador (ver Apéndice A Ejemplo
C_O_Introductorio.m), se procede de manera directa con su diseño. Para esto, se usaron las LMI’s
descritas en (4.21) para cada vértice y para resolverlas se hizo uso del Toolbox de Matlab (ver apéndice
A Ejemplo45.m). Los resultados obtenidos fueron:
γ (gamma) 2.5000
∞wzG 0.0878
Matriz de ganancia K [10.24 48 1.7069]
Ubicación de Polos
Lazo Abierto Lazo Cerrado
=1λ =1λ -1.6180 -2.6221 + 1.8272i
=2λ =2λ 0.6180 -2.6221 - 1.8272i
Tabla 4.5: Resultados obtenidos para
os resultados mostrados en la Tabla 4.5 confirman que los requisitos establecidos para el sistema en
∞H - Kxu = sistema incierto- con
L
cuestión son satisfechos (la norma infinita fue menor que γ y γ cumple ser menor que 5) cuando es
cerrado el lazo de control.

Capítulo 4 – Síntesis de controladores robustos 2H y ∞H como LMI’s 59
100 101 102-100
-20
-90
-80
-70
-60
-50
-40
-30
Descomposicion en Valores Singulares del Sistema
pl
La Figura 4.1 muestra la curva de análisis de la descomposición en valores singulares del sistema en lazo
cerrado, la cual, se corresponde con la cota máxima alcanzada por el sistema con el controlador y a su
vez con la norma infinita del mismo.
Ejemplo 4.6: Con
itud
(db)
Am
Frecuencia (rad/seg)
Figura 4.1: Análisis SVD para ∞H -sistema incierto- con Kxu =
trolador H con u∞ Kx= y ubicación de
Dada la representación en espacio de es etido a
incertidumbre de tipo pol sección 4.7. Se pide dise un controlador de la
forma que
.-Estabiliza a en lazo cerrado, tal que lo os a la izquierda de -5 y
mini ir:
.-
polos
tado del sistema lineal invariante en el tiempo som
itópica propuesto en la ñar
Kxu = permita:
r el sistem s polos estén ubicad
mizar la norma ∞H del sistema, es dec
γ<∞wzG , 5<γ para lograr factibilidad de las LMI’s.
ont
procede de manera directa con su diseño. Para ésto, se usaron las LMI’s
escritas en (4.20), (4.21) para cada vértice y para resolverlas se hizo uso del Toolbox de Matlab (ver
apéndice A Ejemplo46.m). Los resultados obtenidos fueron:
Solución: Satisfechas las condiciones para la existencia del c rolador (ver Apéndice A Ejemplo
C_O_Introductorio.m), se
d

Capítulo 4 – Síntesis de controladores robustos 2H y ∞H como LMI’s 60
γ (gamma) 2.5000
∞wzG 0.1633
Matriz de ganancia K [73.6908 35.2705]
Ubicación de Polos
Lazo Abierto Lazo Cerrado
=1λ -1.6180 =1λ -8.0769 + 6.9356i
=2λ 0.6180 =2λ -8.0769 - 6.9356i
Tabla 4.6: Resultados obtenidos para -sistema incierto- con ∞H Kxu = y ubicación de polos
Los resultados mostrados en la Tabla 4.7 confirman que los requisitos establecidos para el sistema en
cuestión son satisfechos (los polos fueron movidos a norma infinita fue menor
ue
la izquierda de -0.4, la
γ y γq cumple ser menor que 5) cuando es cerrado el lazo de control.
100
-30
-40
101 102-110
-100
-90
-80
-70
-60
-50
-20
-10Descomposicion en Valores Singulares del Sistema
mpl
itud
(db)
Frecuencia (rad/seg)
A
nálisis SVD para -sistema incierto- con ∞H Kxu =Figura 4.2: A y ubicación de polos
La Figura 4.2 muestra la curva de análisis de la descomposición en valores singulares del sistema en lazo
cerrado, la cual, se corresponde con la cota máxima alcanzada por el sistema con el controlador y a su
vez con la norma infinita del mismo.

Capítulo 4 – Síntesis de controladores robustos 2H y ∞H como LMI’s 61
Kyu = r ∞H con Ejemplo 4.7: Controlado
Dada la representación en espacio de estado del sistema propuesto en la sección 4.7. Se pide diseñar un
controlador de la form a:
.-Estabilizar el sistema en lazo cerrado y minimizar la norma del sistema, es decir:
.-
a Kyu = que permit
∞H
γ<∞wzG , 5<γ para lograr factibilidad de las LM
Solución: Estudia sfechas las condiciones para la rolador (ver Apéndice A
Ejem u diseño. Para ésto, se usaron las
MI’s descritas en (4.22) para cada vértice y para resolverlas se hizo uso del Toolbox de Matlab (ver
I’s.
das y sati existencia del cont
plo C_O_Introductorio.m), se procede de manera directa con s
L
Apéndice A Ejemplo47.m). En lo que sigue se muestran los resultados obtenidos.
γ (gamma) 2.5000
∞wzG 0.8176
Matriz de ganancia K [-8.4184]
Ubicación de Polos
Lazo Abierto Lazo Cerrado
=1λ -1.6180 =1λ -0.5002 + 3.6175i
=2λ 0.6180 =2λ -0.5002 - 3.6175i
Tabla 4.7: Resultados obtenidos para -sistema incierto- con
Los resultados mostrados en la Tabla 4.7 confirman que los requisitos establecidos para el sistema son
satisfechos (la norma infinita fue menor que
∞H Kyu =
γ y γ cumple ser menor que 5) cuando es cerrado el lazo
de control.
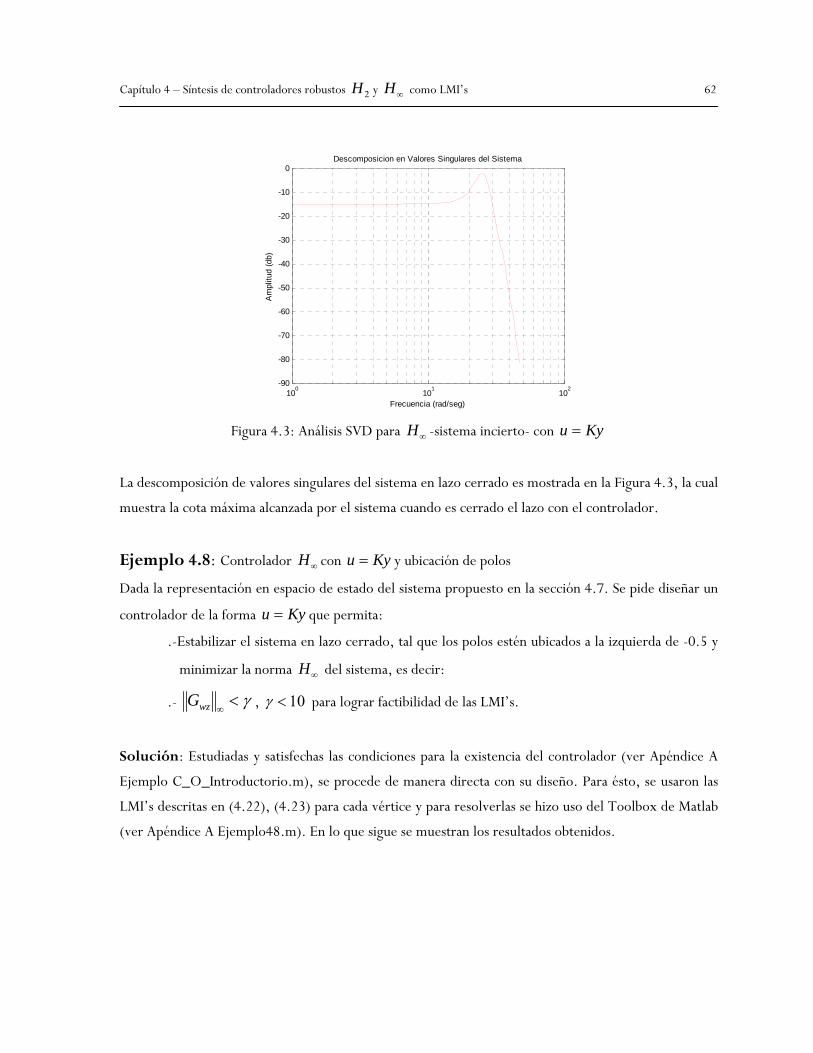
Capítulo 4 – Síntesis de controladores robustos 2H y ∞H como LMI’s 62
100 101 102-90
-80
-70
-10
-20
-30
-40
-60
-50
0Des n ecomposicio n Valores Singulares del Sistema
Am
db)
Figura 4.3: Análisis SVD para -sistema incierto- con
La descomposición de valores singulares del sistema en lazo cerrado es mostrada en la Figura 4.3, la cual
muestra la cota máxima alcanzada por el sistema cuando es cerrado el lazo con el controlador.
Ejemplo 4.8: Control
plitu
d (
Frecuencia (rad/seg)
∞H Kyu =
ador ∞H con Kyu = y ubicación de po
Dada la representación e ado del sistema propuesto en la sección 4.7. Se pide diseñar un
controlador de la forma que permita:
.-Estabilizar el sistema en lazo cerrado, tal que los polos estén ubicados a la izquierda de -0.5 y
mini ir:
los
n espacio de est
Kyu =
mizar la norma H del sistema, es dec∞
γ<∞wz , 10G <γ.- para lograr factibilidad de las LMI’s.
Solución: Estudiadas y satisfechas las condiciones para la existencia del controlador (ver Apéndice A
Ejemplo C_O_Introductorio.m), se procede de manera directa con su diseño. Para ésto, se usaron las
LMI’s descritas en (4.22), (4.23) para cada vértice y para resolverlas se hizo uso del Toolbox de Matlab
(ver Apéndice A Ejemplo48.m). En lo que sigue se muestran los resultados obtenidos.

Capítulo 4 – Síntesis de controladores robustos 2H y ∞H como LMI’s 63
γ (gamma) 5.0000
∞wzG 1.0880
Matriz de ganancia K [-15.5284]
Ubicación de Polos
Lazo Abierto Lazo Cerrado
=1λ -1.6180 =1λ -0.5004 + 5.0194i
=2λ 0.6180 =2λ -0.5004 - 5.0194i
Tabla 4.8: Resultados obtenidos para -sistema incierto- con ∞H Kyu = y ubicación de polos
Los resultados mostrados en la Tabla 4.8 confirman que los requisitos establecidos para el sistema son
satisfechos (los pol da os fueron movidos a la izquier de -0.5, la norma infinita fue menor que γ y γ
cumple ser menor que 10) cuando es cerrado el lazo de control.
100 101 102-80
-70
0
-10
-20
-60
-50
-40
-30
10Descomposicion en Valores Singulares del Sistema
ud (d
b)
Frecuencia (rad/seg)
Am
plit
Figura 4.4: Análisis SVD para ∞H -sistema incierto- con Kyu = y ubicación de polos
La descomposición de valores singulares del sistema en lazo cerrado es mostrada en la Figura 4.4, la cual
muestra la cota máxima alcanzada por el sistema cuando es cerrado el lazo con el controlador.

Capítulo 5
Diseño de controladores H y H∞ para una caldera
En es casos: ctor
e estados y realimentación estática de la salida, para un sistema de calderas sometido a incertidumbre
2
te Capítulo serán diseñados los controladores 2H y ∞H para los realimentación del ve
d
politópica. Cuyo esquema se muestra en la figura 5.1.
Figura 5.1: Esquema de generación de vapor
El siguiente sistema de ecuaciones describe el comportamiento de una caldera alrededor de un punto de
operación caracterizado por un flujo de vapor máximo de 350 t/h. Una presión del domo de 140 bar y
un 90% de plena carga:

Capítulo 5 – Diseño de controladores 2H y ∞H para una caldera 65
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
=
0.074300- 0.000045 0.000035 0 0.000361 0.082200- 0 0 0.041100
3.851000- 0.000887 0.100000- 0 0.071800 0.621000- 0.000122- 0.000078- 0 0.032900
0.019100 0.025000 0.039600 0 0.129000-
δA
⎥⎥
⎢⎢
⎥⎥
⎢⎢
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
0.00000543- 00 0.00002490
0.00989000- 0 0.00003590 0 0.00139000 0
2;
1001101010
1 BB
Donde:
es la presión del domo (bar)
es el nivel de liquido en el domo (m)
es la temperatura del liquido en el domo (°C)
es la temperatura en el hogar (°C)
es la calidad del vapor (%)
es el flujo de calor de los calentadores (kJ/s)
es el flujo de agua de alimentación (Kg/s)
⎥⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡=
0001000001
2;0001000001
1 CC
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
0000000000000000
D
1x
2x
3x
4x
5x
1u
2u
Se sabe que la matriz A pertenece a un conjunto politópico δβ y que el parámetro
[ ] 0;11 0 =−∈ δδ , de esta manera, se procede con el estudio de la incertidumbre politópica

Capítulo 5 – Diseño de controladores 2H y ∞H para una caldera 66
presente en la matriz de estados . Los vértices para este sistema quedan descritos como , con ,
el número de parámetros in o que a este ejercicio respecta se analizarán 2 vértices.
La matriz
Aciertos. Por l
n2 n
A está en realidad descrita por:
[ ]δδδδδ ∈+= ;2211 AAA
2δ
1
0.074300- 0.000045 0.000035 0 0.000361 0.082200- 0 0 0.041100
3.851000- 0.000887 0.100000- 0 0.071800 0.621000- 0.000122- 0.000078- 0 0.032900
0.019100 0.025000 0.039600 0 0.129000-
0.074300- 0.000035 0 0.000361 - 0 0 0.041100
3.85100- 0.100000- 0 0.071800 0.621000- - 0.000078- 0 0.032900
0.019100 0.039600 0 0.129000-
δδ
δ⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
+
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
=A
as ecuaciones serán:
0.0000450.082200
0.0008870.000122
0.025000
0
L
021
21 1
δδδδδ
δδ
=+
=+
La solución de estas ecuaciones e ser vista en Apéndice A (Ejemplo EcuacionesCaldera.m) y cuyos
resultados fueron:
pued
5.0;5.0 21 == δδ
Cumpliendo con las restri scritas por la ecuación (3.2), en este sentido los vértices del
quedan definidos por:
propuesto por Kalman para la existencia de controladores para el sistema. (Ver Apéndice A Ejemplo
C_O_Caldera.m), c
controlables y observables.
cciones de
0.000887
025
politópo
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢
⎢
=
0.074300- 0
3.851000- 0.100000- 0 0.071800 0.621000-0.019100 000
1A
⎡ 0. 0.039600 0 0.129000-
⎢ 0.000122- 0.000078- 0 0.032900
⎢⎣ 0.000045 0.000035 0 0.000361 ⎢⎢ 1.00000 0.082200- 0 0 0.041100
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢
⎢
⎣ 0.074300- 0.000045 0.000035 0 0.000361 00000
0000.621000- 0.000122- 0.000078- 0 0.032900 0.019100 0.025000
A ⎢⎢
= 3.851- 0.000887 0.100000- 0 0.071800 2
⎢⎡ 0.039600 0 0.129000-
⎢ 1.0- 0.082200- 0 0 0.041100
Conocidos los vértices del politópo, se procede con el estudio de controlabilidad y observabilidad
uyos resultados confirman que tanto los vértices, como la matriz nominal son

Capítulo 5 – Diseño de controladores 2H y ∞H para una caldera 67
Satisfechas las condiciones de controlabilidad y observabilidad, se procede con el di ño de l s
controladores.
se o
5.1 C a
Para el diseño de este controlador se toma en cuenta varios aspectos: el principal es disponer de los
estados, es decir, que todos ellos sean medibles (
ontrol dor 2H
), con IIC =2 la identidad y que la matriz D sea cero
para que la norma sea finita.
Controlador con
lderas mostrado a principio de capítulo, se pide diseñar un controlador por
realimentación del vector de estados que permita:
._ Estabilizar el sistema en lazo cerrado y minimizar la norma 2 tal que:
2H
2H Kxu =
Para el sistema de ca
._ γ<2wz ; con G 110<γ para lograr factibilidad de las LMI’s.
Una vez estudiadas las condiciones para la existencia del controlador y asumiendo las consideraciones
I’s descritas en (4.16) extendidas para cada vértice y para resolverlas
se hizo uso del Toolbox de Matlab (ver Apéndice A Ejemplo51.m). En lo que sigue se muestran los
resultados obtenidos.
ostentadas para el diseño de este controlador, se procede de manera directa con el diseño del mismo.
Para esto, se usaron las LM
γ (gamma) 73.6885
2wzG 71.4354
)(Wtraza 158.7984
Matriz de ganancia K
1.0e+005 *
⎥⎦
⎤⎢⎣
⎡0.0069- 0.0001- 0.0004 0.0003 0.0002 2.0651 0.1965- 0.0454- 0.2063- 0.0964-
Ubicación de Polos
Lazo Abierto Lazo Cerrado
=1λ 0 =1λ -0.5337 + 0.0565i

Capítulo 5 – Diseño de controladores 2H y ∞H para una caldera 68
=2λ -0.1803 =2λ -0.5337 - 0.0565i
=
3λ -0 =3λ.0596 + 0.0172i -0.0075
=4λ -0.0596 - 0.0172i =4λ -0.1223
=5λ -0.0860 =5λ -0.0756
Tabla 5.1: Resultados obtenidos 2 -sistema físico- con Kxu =
para
La Tabla 5.1 muestra que el controlador cumple con las especificaciones planteadas, es decir, el sistema
y a su vez menor que
H
es estabilizado en lazo cerrado, la norma 2H cumple ser menor que la traza de W
el valor γ establecido. Cumplidas con las especificaciones de diseño, se concluye que el controlador
hallado estabiliza internamente el sistema y minimiza el efecto del ruido a la salida del mismo.
En la Figura 5.2 se muestran los autovalores de la matriz de estados cuando es cerrado el lazo
de control sujeto a la variación del parám
tome la incerteza, pues ésta siempre tiene sus autovalores en el semiplano izquierdo cerrado.
etro incierto. Y en la cual se observa que no importa que valor
polo1 en lazo cerrado polo2 en lazo cerrado
-1 -0.5 0
0.058 -0.055
naria
0.5 1
-0.5337-0.5337
-0.5337-0.5336
0.056
0.057
-0.5337-0.5337
-0.5336-0.057
-0.056
naria
incertidumbreP Real
P Im
agi
P Im
agi
0 0.5 1
-0.5-0.5337 -1P Real incertidumbre
-1 -0.5 0 0.5 1
-7.55-7.5
-7.45-7.4
x 10-3
-1
0
1
P Im
agin
aria
polo3 en lazo cerrado
ncertidumbreP Real
1
0
i-1 -0.5 0 0.5 1
-0.123-0.1225
-0.122-0.1215
-0.121-1P
Imag
inar
ia
polo4 en lazo cerrado
incertidumbreP Real
1
0
-1 -0.5 0 0.5 1
-0.0765-0.076
-0.0755-0.075
-0.0745-1P
Imag
inar
ia
polo5 en lazo cerrado
incertidumbreP Real
Figura 5.2: Autovalores en lazo cerrado d l parámetro incierto el sistema variando e

Capítulo 5 – Diseño de controladores 2H y ∞H para una caldera 69
Para estudiar las respuestas del sistema en lazo cerr ma en simulink mostrado en la
Figura 5.3
ado se uso el diagra
Planta
Control
x' = Ax+Bu y = Cx+Du
y
Salidas medidas
z
ladasSalidas contro
Referencia escalón
Ruido blanco
K*uvec
igura 5.3: Diagrama en Simulink para analizar las salidas del sistema en lazo cerrado
F
Una vez simuladas las salidas con la correspondiente matriz de ganancia K, se obtuvieron las siguientes
gráficas
0 2000 4000 6000 8000 10000 12000-60
-40
-20
0
20
40
60Salidas medidas para el controlador h2 con u=kx
x1x2x3x4x5
Figura 5.4: Salidas medidas para el sistema con el controlador
2H -u Kx=
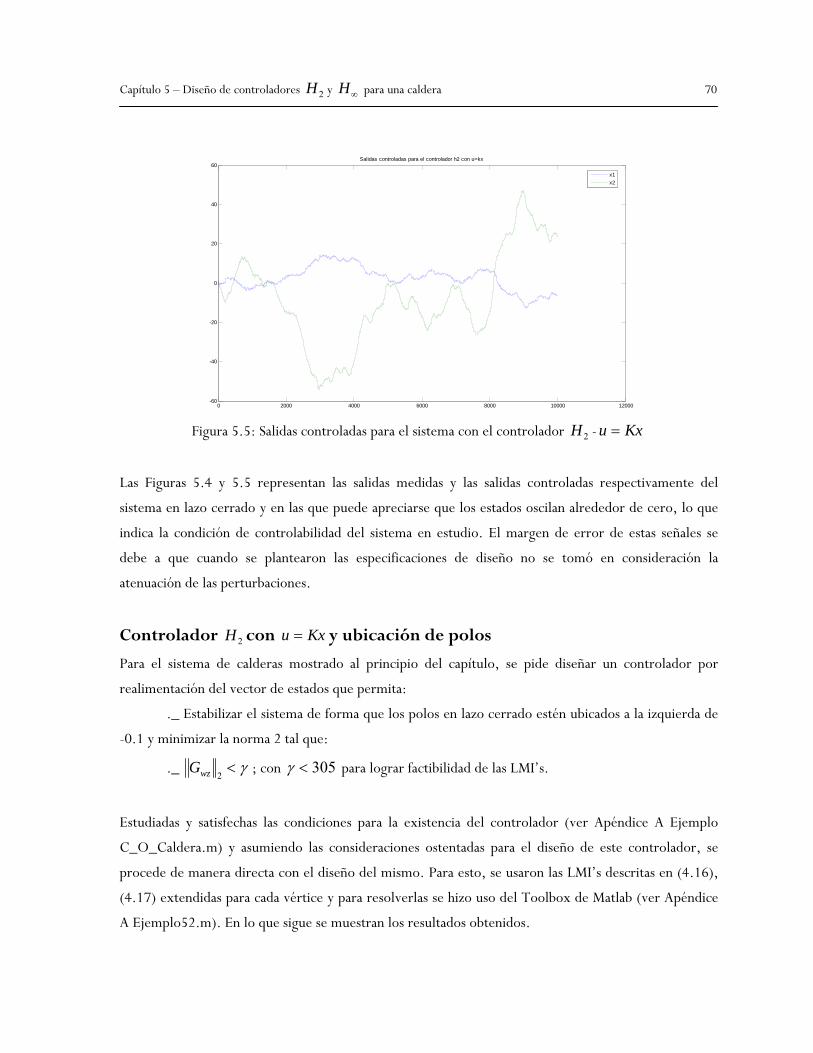
Capítulo 5 – Diseño de controladores 2H y ∞H para una caldera 70
0 2000 4000 6000 8000 10000 12000-60
-40
-20
0
20
40
60Salidas controladas para el controlador h2 con u=kx
x1x2
Figura 5.5: Salidas controladas para el sistema con el controlador
ras 5.4 y 5.5 representan las salidas medidas y las salidas controladas respectivamente del
sistema en lazo cerrado y en las que puede apreciarse que los estados oscilan alrededor de cero, lo que
indica la condición de controlabilidad del sistema en estudio. El margen de error de estas señales se
debe a que cuando se plantearon las especificaciones de diseño no se tomó en consideración la
atenuación de las perturbaciones.
Controlador con y ubicación de polos
Para el sistema de calderas mostrado al principio del capítulo, se pide diseñar un controlador por
realimentación del vector de estados que permita:
._ Estabilizar el sistema de forma que los polos en lazo cerrado estén ubicados a la izquierda de
-0.1 y minimizar la norma 2 tal que:
._
2H - u Kx=
Las Figu
2H Kxu =
γ<2wz ; con 305<G γ para lograr factibilidad de las LMI’s.
Estudiadas y satisfechas las condiciones para la existencia del controlador (ver Apéndice A Ejemplo
C_O_Caldera.m) y asumiendo las consideraciones ostentadas para el diseño de este controlador, se
procede de manera directa con el diseño del mismo. Para esto, se usaron las LMI’s descritas en (4.16),
(4.17) extendidas para cada vértice y para resolverlas se hizo uso del Toolbox de Matlab (ver Apéndice
A Ejemplo52.m). En lo que sigue se muestran los resultados obtenidos.

Capítulo 5 – Diseño de controladores 2H y ∞H para una caldera 71
γ (gamma) 203.6424
2wzG 200.6535
)(Wtraza 4.7225e+003
Matriz de ganancia K
1.0e+006 *
⎥⎦
⎤⎢⎣
⎡0.1608- 0.0003 0.0006 0.0105 0.0023 1.3317- 0.0004 0.0063 0.1122 0.0246
Ubicación de Polos
Lazo Abierto Lazo Cerrado
=1λ 0 =1λ -1.4019
=2λ -0.1803 =2λ -0.1550 + 0.0537i
=3λ -0.0596 + 0.0172i =3λ -0.1550 - 0.0537i
=4λ -0.0596 - 0.0172i =4λ -0.1332 + 0.0091i
=5λ -0.0860 =5λ -0.1332 - 0.0091i
Tabla 5.2: Resultados obtenidos para 2H -sistema físico- con Kxu = y ubicación de polos
La Tabla 5.2 muestra que el controlador cumple con las especificaciones planteadas, es decir, el sistema
s estabilizado en lazo cerrado de tal forma que los polos fueron movidos a la izquierda de -0.1, la
que el valor
e
norma 2H cumple ser menor que la traza de W y a su vez menor γ establecido. Cumplidas
mismo.
los autovalores de la matriz de estados cuando es cerrado el lazo
de control sujeto a la v n del pa va que no importa que valor
me la incerteza, pues ésta siempre tiene sus autovalores en el semiplano izquierdo cerrado
con las especificaciones de diseño, se concluye que el controlador hallado estabiliza internamente el
sistema y minimiza el efecto del ruido a la salida del
En la Figura 5.6 se muestran
ariació rámetro incierto. Y en la cual se obser
to

Capítulo 5 – Diseño de controladores 2H y ∞H para una caldera 72
-1 -0.5 0 0.5 1
-1.404-1.402
-1.4-1.398
-1
0
1
P Im
agin
aria
polo1 en lazo cerrado polo2 en lazo cerrado
0.06
incertidumbreP Real-1 -0.5 0 0.5 1
-0.158-0.156
-0.154-0.152
-0.150.04
0.05
P Real
P Im
agin
aria
incertidumbre
polo4 en lazo cerradopolo3 en lazo cerrado
-1 -0.5 0 0.5 1
-0.158-0.156
-0.154-0.152
-0.15-0.06
-0.05
-0.04 10
x 10-3
P
P Im
agin
aria
Pna
ria
incertidumbre Real-1 -0.5 0 0.5 1
-0.14-0.135
-0.136
8
incertidumbre
Imag
i
P Real
polo5 en lazo cerrado
-6
x 10-3
-8
-1 -0.5 0 0.5 1
-0.14-0.135
-0.13-10
P Real incertidumbre
P Im
agin
aria
Figura 5.6: Autovalores en lazo cerrado del sistema variando el parámetro incierto
mostrado en la Figura 5.3 con la correspondiente matriz de ganancia K se Haciendo uso del diagrama
obtuvieron las siguientes respuestas del sistema en lazo cerrado
0 2000 4000 6000 8000 10000 12000-1500
-1000
-500
0
500
1000
1500Salidas medidas para el controlador h2 con u=kx y ubicación de polos
x1x2x3x4x5
Figura 5.7: Salidas medidas para el sistema con el controlador 2H - Kxu = y ubicación de polos

Capítulo 5 – Diseño de controladores 2H y ∞H para una caldera 73
0 2000 4000 6000 8000 10000 12000-250
-200
-150
-100
-50
0
50
100
150
200Salidas controladas para el controlador h2 con u=kx y ubicación de polos
x1x2
2H - Kxu =Figura 5.8: Salidas controladas para el sistema con el controlador y ubicación de polos
Las Figuras 5.7 y 5.8 representan las salidas medidas y las salidas controladas respectivamente del
sistema en lazo cerrado y en las que puede apreciarse que los estados oscilan alrededor de cero, lo que
indica la condición de controlabilida
antearon las especificaciones de diseño no se tomó en consideración la
Controlador con
Para el sistema de calderas mostrado a principio de capítulo, se pide diseñar un controlador por
realimentación estática de la salida que permita:
._ Estabilizar el sistema en lazo cerrado y minimizar la norma 2 tal que:
._
d del sistema en estudio. El margen de error de estas señales se
debe a que cuando se pl
atenuación de las perturbaciones.
2H Kyu =
γ<2wzG ; con 100<γ para lograr factibilidad de las LMI’s.
Una vez estudiadas las condiciones para la existencia del controlador y asumiendo las consideraciones
ostentadas para el diseño de este controlador, se procede de manera directa con el diseño del mismo.
Para ésto, se usaron las LMI’s descritas en (4.18) extendidas para cada vértice y para resolverlas
se hizo uso del Toolbox de Matlab (ver Apéndice A Ejemplo53.m). En lo que sigue se muestran los
resu
ltados obtenidos.

Capítulo 5 – Diseño de controladores 2H y ∞H para una caldera 74
γ (gamma) 66.9728
2wzG 57.1598
)(Wtraza 166.5222
Matriz de ganancia K
* 004+1.0e
⎥⎦
⎤⎢⎣
⎡0.0028 0.0014 2.2588- 0.9750-
Ubicación de Polos
Lazo Abierto Lazo Cerrado
=1λ 0 =1λ -0.0520 + 0.0745i
=2λ -0.1803 =2λ -0.0520 - 0.0745i
3λ = 3λ = -0.0596 + 0.0172i -0.1319
=4λ -0.0596 - 0.0172i =4λ -0.0405
=5λ -0.0860 =5λ -0.0879
Tabla 5.3: Resultados obtenidos para 2H -sistema físico- con Kyu =
La Tabla 5.3 muestra que el controlador cumple con las especificaciones planteadas, es decir, el sistema
s estabilizado en lazo cerrado, la norma cumple ser menor que la traza de y a su vez menor que 2H We
el valor γ establec . Cumido plidas con las especificacione
ndo es cerrado el lazo
de control sujeto a la v n del pa va que no importa que valor
tome la incerteza, pues ésta siempre tiene sus autovalores en el semiplano izquierdo cerrado.
s de diseño, se concluye que el controlador
hallado estabiliza internamente el sistema y minimiza el efecto del ruido a la salida del mismo.
En la Figura 5.9 se muestran los autovalores de la matriz de estados cua
ariació rámetro incierto. Y en la cual se obser

Capítulo 5 – Diseño de controladores 2H y ∞H para una caldera 75
pol oo1 en lazo cerrad polo2 en lazo cerrado
-1 -0.5 0 0.5 1
-0.0513-0.0513
-0.0513-0.0513
-0.05120.072
0.074
0.076
incertidumbreP Re
P Im
agin
aria
al-1 -0.5 0 0.5 1
-0.0513-0.0513
-0.0513-0.0513
-0.0512-0.076
-0.074
-0.072
incertidumbreP Real
P Im
agin
aria
-1 -0.5 0 0.5 1
-0.135-0.134
-0.133-0.132
-1
0
1
P Im
agin
aria
incertidumbre
polo3 en lazo cerrado
P Real
1
0
-1 -0.5 0 0.5 1
-0.043-0.042
-0.041-0.04
-0.039-1P
ria
polo4 en lazo cerra
incertidumbre
Imag
ina
do
P Real
1
0
-1 -0.5 0 0.5 1
-0.0885-0.088
-0.0875-0.087
-0.0865-1P
Imag
inar
ia
polo5 en lazo cerrado
incertidumbre
Figura etro incierto
P Real
5.9: Autovalores en lazo cerrado del sistema variando el parám
Una vez simuladas las salidas con la correspondiente matriz de ganancia K en el diagrama 5.3, se
obtuvieron las siguientes gráficas
0 2000 4000 6000 8000 10000 12000-40
-30
-20
-10
0
10
20
30
40Salidas medidas para el controlador H2 con u=ky
x1x2
Figura 5.10: Salidas medidas para el sistema con el controlador 2H - u Ky=

Capítulo 5 – Diseño de controladores 2H y ∞H para una caldera 76
0 2000 4000 6000 8000 10000 12000-40
-30
-20
-10
0
10
20
30
40Salidas controladas para el controlador H2 con u=ky
x1x2
Figura 5.11: Salidas controladas para el sistema con el controlador
Las Figuras 5.10 y 5.11 representan las salidas medidas y las salidas controladas respectivamente del
sistema en lazo cerrado y en las que puede apreciarse que los estados oscilan alrededor de cero, lo que
indica la condición de controlabilidad del sistema en estudio. El margen de error de estas señales se
debe a que cuando se pl ación la
iones.
Controlador con y ubicación de polos
Para el sistema de calderas mostrado a principio de este capítulo, se pide diseñar un controlador por
realimentación estática de la salida que permita:
._ Estabilizar el sistema de forma que los polos en lazo cerrado estén ubicados a la izquierda de
-0.01 y minimizar la norma 2 tal que:
._
2H - u Ky=
antearon las especificaciones de diseño no se tomo en consider
atenuación de las perturbac
2H Kyu =
γ<2wzG ; con 100<γ para lograr factibilidad de las LMI’s.
Estudiadas y satisfechas las condiciones para la existencia del controlador (ver Apéndice A Ejemplo
C_O_Caldera.m) y asumiendo las consideraciones ostentadas para el diseño de este controlador, se
procede de manera directa con el diseño del mismo.

Capítulo 5 – Diseño de controladores 2H y ∞H para una caldera 77
Para esto, se usaron las LMI’s descritas en (4.18), (4.19) extendidas para cada vértice y para
resolverlas se hizo uso del Toolbox de Matlab (ver Apéndice A Ejemplo54.m). En lo que sigue se
muestran los resultados obtenidos.
γ (gamma) 66.9810
2wzG 57.8101
)(Wtraza 210.7627
Matriz de ganancia K
1.0e+004 *
⎥⎦
⎤⎢⎣
⎡0.0089 0.0032 6.9356- 2.2718-
Ubicación de Polos
Lazo Abierto Lazo Cerrado
=1λ 0 =1λ -0.0321 + 0.1367i
=2λ -0.1803 =2λ -0.0321 - 0.1367i
=3λ -0.0596 + 0.0172i =3λ -0.0514
=4λ -0.0596 - 0.0172i =4λ -0.1299
=5λ -0.0860 =5λ -0.0917
Tabla 5.4: Resultados obtenidos para -sistema físico- con 2H Kyu = y ubicación de polos
e los polos fueron movidos a la izquierda de -0.1, la
norma
La Tabla 5.4 muestra que el controlador cumple con las especificaciones planteadas, es decir, el sistema
es estabilizado en lazo cerrado de tal forma qu
2H cumple ser menor que la traza de W y a su vez menor que el valor γ establecido. Cumplidas
con las especificaciones de diseño, se concluye que el controlador hallado estabiliza internamente el
sistema y minimiza el efecto del ruido
res en el semiplano izquierdo cerrado.
a la salida del mismo.
En la Figura 5.12 se muestran los autovalores de la matriz de estados cuando es cerrado el lazo
de control sujeto a la variación del parámetro incierto. Y en la cual se observa que no importa que valor
tome la incerteza, pues ésta siempre tiene sus autovalo

Capítulo 5 – Diseño de controladores 2H y ∞H para una caldera 78
-1 -0.5 0 0.5 1
-0.032-0.032
-0.0319-0.0319
-0.03180.135
incertidumbre
polo1 en lazo cerrado
0.136
0.137
P Real
P Im
agin
aria
-1 -0.5 0 0.5 1
-0.032-0.032
incertidumbre
polo2 en lazo cerrado
-0.135
-0.136
-0.0319-0.0319
-0.0318-0.137
P
P Im
agin
aria
Real
-1 -0.5 0 0.5 1
-0.052-0.0515
-0.051-0.0505
-0.05-1
0
1
P Im
agin
aria
polo3 en lazo cerrado
incertidumbreP Real
1
-1 -0.5 0 0.5 1
-0.1314-0.1312
-0.131-0.1308
-0.1306-1
0
P I
a
polo4 en lazo cerrado
incertidumbreP Real
mag
inar
i
1
0
-1 -0.5 0 0.5 1
-0.0916-0.0915
-0.0914-0.0913
-1P Im
agin
aria
polo5 en lazo cerrado
incertidumbreP R
Figura 5.12: Autovalores en lazo cerrado d variando el parámetro incierto
Haciendo uso del diagrama mostrado en la Figura 5.3 respondiente matriz de ganancia K se
obtuvieron las siguientes respuestas del sistema en lazo cerrado
eal
el sistema
con la cor
Salidas para el controlador H2 con u=kymedidas
0 2000 4000 6000 8000 10000 12000-60
-50
-40
40
-30
-20
-10
0
10
20
x1x2
30
2H - Kyu =Figura 5.13: Salidas medidas para el sistema con el controlador y ubicación de polos

Capítulo 5 – Diseño de controladores 2H y ∞H para una caldera 79
0 2000 4000 6000 8000 10000 12000-60
-50
-40
-30
-20
-10
0
10
20
30
40Salidas controladas para el controlador H2 con u=ky
x1x2
2H - Kyu =Figura 5.14: Salidas controladas para el sistema con el controlador y ubicación de polos
Las Figuras 5.13 y 5.14 representan las salidas medidas y las salidas controladas respectivamente del
sistema en lazo cerrado y en las que puede apreciarse que los estados oscilan alrededor de cero, lo que
indica la condición de controlabilidad del sistema en estudio. El margen de error de estas señales se
debe a q ración la
5.2 Controlador
Controlador con
Para el diseño de este controlador hay que tomar en cuenta que los estados deben estar disponibles para
realimentarlos, es decir, que todos ellos sean medibles (
ue cuando se plantearon las especificaciones de diseño no se tomo en conside
atenuación de las perturbaciones.
∞H
∞H Kxu =
), con IIC =2 la identidad.
Para el sistema de calderas mostrado en este capítulo, se pide diseñar un controlador por
realimentación del vector de estados que permita:
._ Estabilizar el sistema en lazo cerrado y minimizar la norma ∞ tal que:
._ γ<∞wzG ; con 5<γ para lograr factibilidad de las LMI’s.

Capítulo 5 – Diseño de controladores 2H y ∞H para una caldera 80
Una vez estudiadas las condiciones para la existencia del controlador (ver Apéndice A Ejemplo
C_O_Caldera.m) y asumiendo las consideraciones ostentadas para el diseño de este controlador, se
procede de manera directa con el diseño del mismo.
Para esto, se usaron las LMI’s descritas en (4.20) extendidas para cada vértice y para resolverlas
se hizo uso del Toolbox de Matlab (ver Apéndice A Ejemplo55.). En lo que sigue se muestran los
resultados obtenidos.
γ (gamma) 2.5000
∞wzG 1.4597
Matriz de ganancia K ⎥⎤
⎢⎡
0.0219 0.0000 0.0220- 0.0079-4.7417- 0.0115- 3.8632 0.9014-
1.0e+007 *
⎦⎣ 0.0000 0.0083-
Ubicación de Polos
Lazo Abierto Lazo Cerrado
=1λ 0 =1λ -123.6451
=2λ -0.1803 =2λ -2.1929
=3λ -0.0596 + 0.0172i =3λ -0.4143
=4λ -0.0596 - 0.0172i =4λ -0.2528
=5λ -0.0860 =5λ -0.0580
T a 5.5: R os obtenidabl esultad os para -sistema físico- con
estabilizado en lazo cerrado, la norma infinito del sistema con el controlador es menor que
∞H Kxu =
La Tabla 5.5 muestra que las especificaciones de diseño fueron satisfechas, es decir, el sistema fue
γ , por lo
bien en cuanto a los requisitos establecidos se
refiere.
la Figura 5. uest ados cuando es cerrado el lazo
de control sujeto a la variación del parámetro incierto. Y en la cual se observa que no importa que valor
tome la incerteza, pues ésta siempre tiene sus autovalores en el semiplano izquierdo cerrado.
que se concluye que el controlador diseñado se comporta
En 15 se m ran los autovalores de la matriz de est

Capítulo 5 – Diseño de controladores 2H y ∞H para una caldera 81
-1 -0.5 0 0.5 1
-123.6451-123.6451
-123.6451-123.6451
-123.645-1
0
1
P Im
agin
aria
polo1 en lazo cerrado
incertidumbreP Real-1 -0.5 0 0.5 1
-2.1931-2.193
-2.1929-2.1928
-2.1927-1
1
P Im
agin
aria
polo2 en lazo cerrado
0
incertidumbreP Real
-1 -0.5 0 0.5 1
-0.4146-0.4144
-0.4142-0.414
-1
0
1
P Im
agin
aria
o3 en lazo cerrado
incertidumbreP Real
pol
1
0
-1 -0.5 0 0.5 1
-0.2528-0.2528
-0.2527-0.2527
-0.2526-1P
Imag
inar
ia
polo4 en lazo cerrado
incertidumbreP Real
1
0
-1 -0.5 0 0.5 1
-0.058-0.058
-0.058-0.058
-0.058-1P
Imag
inar
ia
polo5 en lazo cerrado
incertidumbreP Real Figura 5.15: Autovalores en lazo cerrado del sistema variando el parámetro incierto
Haciendo uso del diagrama mostrado en la Figura correspondiente matriz de ganancia K se
obtuvieron las siguientes respuestas del sistema en lazo cerrado.
5.3 con la
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
x 104
-2500
-2000
-1500
-1000
-500
0
500
1000
1500
2000Salidas medidas para el =kx controlador Hinf con u
x1x2x3x4x5
Figura 5.16: Salidas medidas para el sistema con el controlador ∞H - Kxu =

Capítulo 5 – Diseño de controladores 2H y ∞H para una caldera 82
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
x 104
-1
-0.5
0
0.5
1
1.5Salidas controladas para el controlador Hinf con u=kx
x1x2
Figura 5.17 Salidas controladas para el sistema con el controlador
Las Figuras 5.16 y 5.17 representan las salidas medidas y las salidas controladas respectivamente del
sistema en o, lo que
dica la condición de controlabilidad del sistema en estudio. El margen de error de estas señales se
∞H - u Kx=
lazo cerrado y en las que puede apreciarse que los estados oscilan alrededor de cer
in
debe a que cuando se plantearon las especificaciones de diseño no se tomo en consideración la
atenuación de las perturbaciones.
100 101 102-90
-80
-70
-60
-50
-40
-30
-20
-10
0
10Descomposicion en Valores Singulares del Sistema en lazo cerrado
Frecuencia (rad/seg)
Am
plitu
d (d
b)
Figura 5.18: Análisis SVD para ∞H -sistema físico- con u Kx=

Capítulo 5 – Diseño de controladores 2H y ∞H para una caldera 83
La Figura 5.18 muestra la curva de
lazo cerrado, la cual, se corresponde
n
∞H
análisis de la descomposición en valores singulares del sistema en
con la cota máxima alcanzada por el sistema con el controlador y a
su vez con la norma i finita del mismo.
Controlador con y ubicación de polos
Para el sistema de calderas mostrado en este capítulo, se pide diseñar un controlador por realimentación
del vector de estados que permita:
._ Estabilizar el sistema en lazo cerrado de forma que los polos estén ubicados a la izquierda de
-0.02 y minimizar la norma tal que:
._
Kxu =
∞
γ<∞wzG ; con 5<γ para lograr factibilidad de las LMI’s.
s las condiciones para la existencia del controlador (ver Apéndice A Ejemplo Una vez estudiada
C_O_Caldera.m) y asumiendo las consideraciones ostentadas para el diseño de este controlador, se
procede de manera directa con el diseño del mismo. Para esto, se usaron las LMI’s descritas en (4.20),
(4.21) extendidas para cada vértice y para resolverlas se hizo uso del Toolbox de Matlab (ver Apéndice
A Ejemplo56.m). En lo que sigue se muestran los resultados obtenidos.
γ (gamma) 2.5000
∞wzG 1.4204
Matriz de ganancia K 1.0e+007 *
⎥⎦
⎤⎢⎣
⎡0.0273 0.0000 0.0001 0.0271- 0.0151-
3.9334- 0.0067- 0.0097- 2.8923 0.5149-
Ubicación de Polos
Lazo Abierto Lazo Cerrado
=1λ 0 =1λ -227.0963
=2λ -0.1803 =2λ -1.1240
=3λ -0.0596 + 0.0172i =3λ -0.5756
=4λ -0.0596 - 0.0172i =4λ -0.2220
=5λ -0.0860 =5λ -0.0578
Tabla 5.6: Resultados obtenidos para -sistema físico- con ∞H Kxu = y ubicación de polos

Capítulo 5 – Diseño de controladores 2H y ∞H para una caldera 84
La Tabla 5.6 muestra que los resultados obtenidos para este controladores satisfacen los requerimientos
planteados, es decir, el sistema fue estabilizado de Manera que los polos en lazo cerrado fueron movidos
a la izquierda de -0.02, del mismo modo, la norma fue menor que ∞H γ y este menor que 5. Por lo
que se concluye que el controlador tiene un buen comportamiento.
arámetro incierto. Y en la cual se observa que no importa que valor
tome la
En la Figura 5.19 se muestran los autovalores de la matriz de estados cuando es cerrado el lazo
de control sujeto a la variación del p
incerteza, pues ésta siempre tiene sus autovalores en el semiplano izquierdo cerrado.
-1 -0.5 0 0.5 1
-227.0963-227.0963
-227.0963-227.0963
-227.0963-1
0
1
P Im
agin
aria
o cpolo1 en laz errado
incertidumbreP Real-1 -0.5 0 0.5 1
-1.1244-1.1242
-1.124-1.1238
-1.1236
1
-1
0
P Im
agin
polo2 en lazo cerrado
aria
incertidumbreP Real
-1 -0.5 0 0.5 1
-0.5765-0.576
-0.5755-0.575
-1
0
1
P Im
agin
aria
polo3 en lazo cerrado
incertidumbreP Real-1 -0.5 0 0.5 1
-0.2219-0.2219
-0.2218-1
0
1
P Im
agin
aria
polo4 en lazo cerrado
-0.222-0.222
incertidumbreP Real
-1 -0.5 0 0.5 1
-0.0578-0.0578
-0.0578-0.0578
-0.0578-1
0
1
P Im
agin
aria
polo5 en laz errado
incertidumbrP Real
Figura 5.19: Autovalores en lazo cerrado del sistema v to
Haciendo uso del diagrama mostrado en la Figura 5.3 respondiente matriz de ganancia K se
obtuvieron las siguientes respuestas del sistema en lazo cerrado.
o c
e
ariando el parámetro incier
con la cor

Capítulo 5 – Diseño de controladores 2H y ∞H para una caldera 85
0 1 2 3 4 5 6 7 8
x 104
-2500
-2000
-1500
-1000
-500
0
500
1000
1500
2000Salidas medidas para el controlador Hinf con u=kx y ubicación de polos
x1x2x3x4x5
Figura 5.20: Salidas medidas para el sistema con el controlador ∞H - Kxu = y ubicación de polos
0 1 2 3 4 5 6 7 8
x 104
-1
-0.5
0
0.5
1
1.5Salidas controladas para el controlador Hinf con u=kx y ubicación de polos
x1x2
.21: Salidas controladas para el sistema con el controlador ∞H - Kxu = y ubicación dFigura 5 e polos
ados oscilan alrededor de cero, lo que
indica la condición de controlabilidad del sistema en estudio. El margen de error de estas señales se
debe a que cuando se plantearon las especificaciones de diseño no se tomo en consideración la
atenuación de las perturbaciones.
Las Figuras 5.20 y 5.21 representan las salidas medidas y las salidas controladas respectivamente del
sistema en lazo cerrado y en las que puede apreciarse que los est
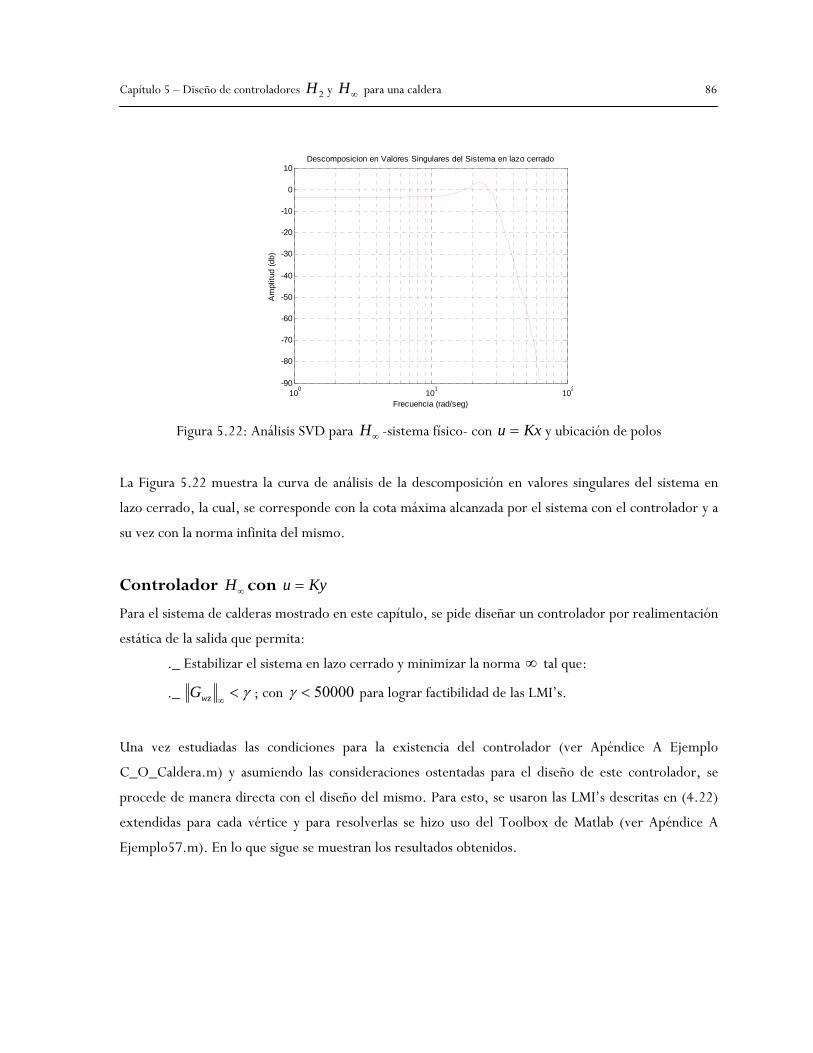
Capítulo 5 – Diseño de controladores 2H y ∞H para una caldera 86
100 101 102-90
-80
-70
-60
-50
-40
-30
-20
-10
0
10Descomposicion en Valores Singulares del Sistema en lazo cerrado
Frecuencia (rad/seg)
Am
plitu
d (d
b)
Figura 5.22: Análisis SVD para ∞H -sistema físico- con u Kx= y ubic
La Figura 5.22 muestra la curva de análisis de la descomposición en valores singulares del sistema en
lazo cerrado, la cual, se corresponde con la cota máxima alcanzada por el sistema con el controlador y a
su vez con la norma infinita del mismo.
Controlador con
Para el sistema de calderas mostrado en este capítulo, se pide diseñar un controlador por realimentación
estática de la salida que permita:
._ Estabilizar el sistema en lazo cerrado y minimizar la norma
ación de polos
∞H Kyu =
∞ tal que:
._ γ<∞wzG ; con 50000<γ para lograr factibilidad de las LMI’s.
s las condiciones para la existencia del controlador (ver Apéndice A Ejemplo
Una vez estudiada
C_O_Caldera.m) y asumiendo las consideraciones ostentadas para el diseño de este controlador, se
procede de manera directa con el diseño del mismo. Para esto, se usaron las LMI’s descritas en (4.22)
extendidas para cada vértice y para resolverlas se hizo uso del Toolbox de Matlab (ver Apéndice A
Ejemplo57.m). En lo que sigue se muestran los resultados obtenidos.

Capítulo 5 – Diseño de controladores 2H y ∞H para una caldera 87
γ (gamma) 2.5000e+004
∞wzG 183.1873
Matriz de ganancia K
1.0e+008 *
⎥⎦
⎤⎢⎣
⎡0.0101- 0.0012-
1.4577 0.1035-
Ubicación de Polos
Lazo Abierto Lazo Cerrado
=1λ 0 =1λ -2.0924 e+002 *
=2λ -0.1803 =2λ -0.0002 + 0.0189i e+002 *
=3λ -0.0596 + 0.0172i =3λ -0.0002 - 0.0189i e+002 *
4λ 4λ= =-0.0596 - 0.0172i -0.0006 e+002 *
=5λ -0.0860 =5λ -0.0021 e+002 *
Tabla 5.7: Resultados obtenidos para ∞H -sistema físico- con Kyu =
La Tabla 5.7 muestra que las especificaciones de diseño fueron satisfechas, es decir, el sistema fue
o c la nor del sistema con el controlador efectivamente es menor estabilizado en laz errado, ma infinito
que γ , por lo que se concluye que el controlador diseñado se comporta bien en cuanto a los requisitos
establecidos se refiere.
En la Figura 5.23 se muestran los autovalores de la matriz de tados cuanes do es cerrado el lazo
de control sujeto a la variación del parám ue no importa que valor
tome la incerteza, pues ésta siempre tiene sus autovalores en el semiplano izquierdo cerrado.
etro incierto. Y en la cual se observa q

Capítulo 5 – Diseño de controladores 2H y ∞H para una caldera 88
polo2 en lazo cerrado
-1 -0.5 0 0.5 1
-203.1323-203.1322
-203.1322-203.1322
-1
0
1
P Im
agin
aria
ado
incertidumbreP Real
polo1 en lazo cerr
1.8999
P Im
agin
aria
1.8998
-1 -0.5 0 0.5 1
-0.0233-0.0233
-0.0233-0.02331.8997
incertidumbreP Real
polo3 en lazo cerrado
-1 -0.5 0 0.5 1
-0.0233-0.0233
-0.0233-0.0233-1.8999
-1.8998
-1.8997
incertidumbreP Real
P Im
agin
aria
0
-0.0578-0.0578
-0.0578-1
1
P
-1 -0.5 0 0.5 1-0.0578
-0.0578
Imag
inar
polo4 en lazo cerrado
incertidumbre
ia
P Real
-1 -0.5 0 0.5 1
-0.2078-0.2078
-0.2078-0.2078
-1
0
1
P Im
agin
aria
lo5 en lazo cerrado
incertidumbreP Real
Figura 5.23: Autovalores en lazo cerrado del sistema variando el parámetro incierto
po
Haciendo uso del diagrama mostrado en la Figura 5.3 con la correspondiente matriz de ganancia
K se obtuvieron las siguientes respuestas del sistema en lazo cerrado.
0 1 2 3 4 5 6 7
x 104
-25
-20
-15
-10
-5
0
5
10
15
20
25Salidas medidas para el controlador Hinf con u=ky
x1x2
Figura 5.24: Salidas medidas para el sistema con el controlador ∞H - u Ky=

Capítulo 5 – Diseño de controladores 2H y ∞H para una caldera 89
0 1 2 3 4 5 6 7
x 104
-25
-20
-15
-10
-5
0
5
10
15
20
25Salidas controladas para el controlador Hinf con u=ky
x1x2
Figura 5.25: Salidas controladas para el sistema con el controlador
Las Figuras 5.24 y 5.25 representan las salidas medidas y las salidas controladas respectivamente del
sistema en lazo cerrado y en las que puede apreciarse que los estados oscilan alrededor de cero, lo que
indica la condición de controlabilida
debe a que cuando se plantearon las especificaci es de diseño no se tomo en consideración la
∞H -u Ky=
d del sistema en estudio. El margen de error de estas señales se
on
atenuación de las perturbaciones.
100 101 102-120
-100
-80
-60
-40
-20
0
20
40
60Descomposicion en Valores Singulares del Sistema en lazo cerrado
Frecuencia (rad/seg)
Am
plitu
d (d
b)
Figura 5.26: Análisis SVD para -sistema físico- con ∞H Kyu =

Capítulo 5 – Diseño de controladores 2H y ∞H para una caldera 90
La Figura 5.26 muestra la curva de
lazo cerrado, la cual, se corresponde
n
∞H
análisis de la descomposición en valores singulares del sistema en
con la cota máxima alcanzada por el sistema con el controlador y a
su vez con la norma i finita del mismo.
Controlador con y ubicación de polos
Para el sistema de calderas mostrado en este capítulo, se pide diseñar un controlador por realimentación
estática de la salida que permita:
._ Estabilizar el sistema en lazo cerrado de forma que los polos estén ubicados a la izquierda de
-0.001 y minimizar la norma tal que:
._
Kyu =
∞
γ<∞wzG ; con 150<γ para lograr factibilidad de las LMI’s.
s las condiciones para la existencia del controlador (ver Apéndice A Ejemplo Una vez estudiada
C_O_Caldera.m) y asumiendo las consideraciones ostentadas para el diseño de este controlador, se
procede de manera directa con el diseño del mismo. Para esto, se usaron las LMI’s descritas en (4.22),
(4.23) extendidas para cada vértice y para resolverlas se hizo uso del Toolbox de Matlab (ver Apéndice
A Ejemplo58.m). En lo que sigue se muestran los resultados obtenidos.
γ (gamma) 75.0000
∞wzG 29.7224
1.0e+008 *
⎥⎦
⎤⎢⎣
⎡0.0081- 0.0002-
1.3246 0.1528- Matriz de ganancia K
Ubicación de Polos
Lazo Abierto Lazo Cerrado
=1λ 0 =1λ -60.2331
=2λ -0.1803 =2λ -0.3157 + 2.5495i
=3λ -0.0596 + 0.0172i =3λ -0.3157 - 2.5495i
=4λ -0.0596 - 0.0172i =4λ -0.0578
=5λ -0.0860 =5λ -0.2112
Tabla 5.8: Resultados obtenidos para ∞H -sistema físico- con Ku y= y ubicación de polos

Capítulo 5 – Diseño de controladores 2H y ∞H para una caldera 91
La Tabla 5.8 muestra que los resultados obtenidos para este controladores satisfacen los requerimientos
planteados, es decir, el sistema fue estabilizado de Manera que los polos en lazo cerrado fueron movidos
a la izquierda de -0.001, del mismo modo, la norma fue menor que ∞H γ y este menor que 5. Por lo
ue se concluye que el controlador tiene un buen comportamiento.
l parámetro incierto. Y en la cual se observa que no importa que valor
tome la
q
En la Figura 5.27 se muestran los autovalores de la matriz de estados cuando es cerrado el lazo
de control sujeto a la variación de
incerteza, pues ésta siempre tiene sus autovalores en el semiplano izquierdo cerrado.
polo2 en lazo cerrado
-1 -0.5 0 0.5 1
-56.3089-56.3089
-56.3089-56.3089
-1
0
1
Imag
inar
ia
errpolo1 en lazo c ado
2.5969
P
incertidumbreP Real-1 -0.5 0 0.5 1
-0.3432-0.3432
-0.3432-0.34322.5968
2.5968
incertidumbreP Real
P Im
agin
aria
-1 -0.5 0 0.5 1
-0.3432-0.3432
-0.3432-0.3432-2.5969
-2.5968
-2.5968
incertidumbre
polo3 en lazo cerrado
P Real
P Im
agin
aria
-1 -0.5 0 0.5 1
-0.0578-0.0578
-0.0578-0.0578
-1
0
1
P Im
agin
aria
polo4 en lazo cerrado
incertidumbreP Real
-1 -0.5 0 0.5 1
-0.2114-0.2114
-0.2114-0.2114
-0.2114-1
0
1
P Im
agin
aria
polo5 en laz errado
incertidumbrP Real
Figura 5.27: Autovalores en lazo cerrado del sistema v to
Haciendo uso del diagrama mostrado en la Figura diente matriz de ganancia K se
obtuvieron las siguientes respuestas del sistema en lazo cerrado.
o c
e
ariando el parámetro incier
5.3 con la correspon
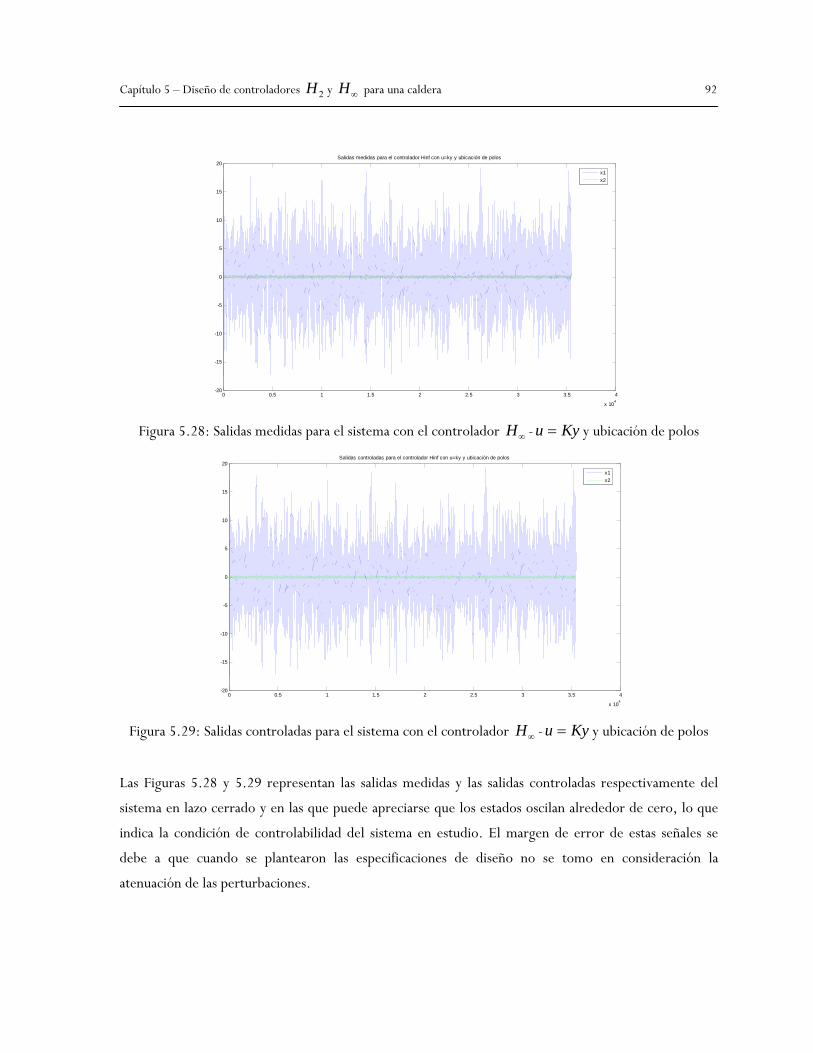
Capítulo 5 – Diseño de controladores 2H y ∞H para una caldera 92
0 0.5 1 1.5 2 2.5 3 3.5 4
x 104
-20
-15
-10
-5
0
5
10
15
20Salidas medidas para el controlador Hinf con u=ky y ubicación de polos
x1x2
Figura 5.28: Salidas medidas para el sistema con el controlador ∞H - Kyu = y ubicación de polos
0 0.5 1 1.5 2 2.5 3 3.5 4
x 104
-20
-15
-10
-5
0
5
10
15
20Salidas controladas para el controlador Hinf con u=ky y ubicación de polos
x1x2
.29: Salidas controladas para el sistema con el controlador ∞H - Kyu = y ubicación dFigura 5 e polos
ados oscilan alrededor de cero, lo que
indica la condición de controlabilidad del sistema en estudio. El margen de error de estas señales se
debe a que cuando se plantearon las especificaciones de diseño no se tomo en consideración la
atenuación de las perturbaciones.
Las Figuras 5.28 y 5.29 representan las salidas medidas y las salidas controladas respectivamente del
sistema en lazo cerrado y en las que puede apreciarse que los est

Capítulo 5 – Diseño de controladores 2H y ∞H para una caldera 93
100 101 102-120
-100
-80
-60
-40
-20
0
20
40Descomposicion en Valores Singulares del Sistema en lazo cerrado
Frecuencia (rad/seg)
Am
plitu
d (d
b)
Figura 5.30: Análisis SVD para ∞H -sistema físico- con u Ky= y ubic
La Figura 5.30 muestra la curva de análisis de la descomposición en valores singulares del sistema en
lazo cerrado, la cual, se corresponde con la cota máxima alcanzada por el sistema con el controlador y a
su vez con la norma infinita del mismo.
Análisis de los resultados De los resultados obtenidos al resolver el conjunto de LMI’s asociados a la solución de cada
problema, puede decirse con certeza que fueron satisfechos los requerimientos de diseño tanto para el
controlador como para el , así por ejemplo, para la ubicación de polos pudo observarse que
los autovalore de la región específicamente seleccionada. Además,
se da se l l
ontrolador ado compro se numé nte al verificar que
ación de polos
2H
diseñ
∞H
s en lazo cerrado se ubicaron dentro
bándo
confirma que el efecto de la perturbación )(tw a la salida controla z ogro minimizar con e )(t
la ricame γ<2wzG y γ<
∞wzG , c
respectivamente. De igual forma, en los gráficos de los autovalores de la matriz de dinámica del sistema
en lazo cerrado, pudo verificarse la propiedad de convexidad que conllevan las desigualdades matriciales
lineales puesto a que se cumplió que el sistema una vez estabilizado para los extremos del intervalo de
variación de la incertidumbre, conservó esta propiedad para el resto de valores en el interior del
mismo.

Conclusiones
Las técnicas de optimización convexas aplicadas (LMI), forman parte de las herramientas que sientan las
bases para el análisis y síntesis de sistemas lineales invariantes en el tiempo sometidos a incertidumbres
en su modelo estudiados en la teoría de control robusto, dichas técnicas resulta beneficioso y una de las
querimientos de diseño se tornan cada vez mas exigentes producto de la
omple dad presente en todo proceso real y porque estas herramientas propor onan solución numérica
a prob as sería
rmul omo problemas convexos y por métodos numéricos dilucidar su solución.
y cuyos resultados (provenientes de soluciones numéricas),
enen yor rango de confiabilidad que las soluciones provenientes de otros métodos.
etivos de control puedan ser expresados en términos de las
normas
hace de ésta, una teoría para análisis de sistemas multivariables muy interesante y con poca complejidad
de im
uaci obl
eño una ve rado el laz
de control.
razones es que los re
ji
lem
arlos c
un ma
H
c ci
as que carecen de solución analítica. Una manera de resolver dichos problem
fo
La técnica que fue empleada, consiste en transformar las restricciones de diseño en
desigualdades matriciales lineales, técnicas que han surgido como herramienta meritoria por poder ser
aplicables a un conjunto de problemas
ti
El hecho de que múltiples obj
2 y ∞ con tan solo involucrar las soluciones de dos ecuaciones desacopladas de Riccati,
comparada con otras técnicas modernas convencionales.
Una las ventajas mas portantes de utilizar las técnicas de desigualdades matriciales lineales
(LMI’s) en la solución de problemas de control de procesos, radica en el hecho de poder expresar como
su nombre lo indica, en un conjunto de inec ones la solución de pr emas complejos, así como
también, la flexibilidad que ofrece para combinar varias restricciones de dis z cer o
En este sentido, hacer uso de las LMI’s para el diseño de controladores robustos, proporciona
muy buenos resultados en cuanto a el cumplimiento de especificaciones de desempeño (estabilidad,
atenuación del ruido a la salida del sistema, mejora en los tiempo de respuesta a permitir la ubicación de
polos en regiones del plano s ) es refiere.
H
Recomendaciones
La orientación de este trabajo de grado fue dirigida al diseño de controladores robustos para sistemas
lineales invariantes en el tiempo sometidos a incertidumbres politópicas a partir de la caracterización de
tanta
•
• Usar métodos de separabilidad para conservar las condiciones de optimalidad.
las normas 2H y ∞H como sistema de desigualdades matriciales lineales, por lo que se recomienda:
• Analizar la posibilidad de extender el caso a la realimentación dinámica de la salida.
• Imponer nuevas especificaciones de desempeño como seguimiento de señales y ver la
mejora en las respuestas obtenidas.
• Implementar las demás regiones de ubicación de polos y observar con que
exactitud se cumplen con los requerimientos establecidos.
• Abordar estos problemas con la versión Primal y comparar el desempeño del sistema al
cerrar el lazo de control con los resultados obtenidos aquí.
• Desarrollar los controladores diseñados a nivel industrial.
Implementar estos controladores en un proceso real.

Bibliografía
pic
Systems, Proc. of 17th IFAC World Congress, Vol. CD-Rom, pp. We-290, Seul , Corea.
Bo and
Balas, Smith, R. (1991), µ-Analysis and Synthesis Toolbox,
Crusiu dback Control Problems, IEEE
Chen, . New York, EE.UU.
Ch Inc, Natick, MA, EE.UU.
Chilali, M. y Gahinet, P. (1996), nts: an LMI approach, IEEE
Transactions on Automatic control , Vol. 41, No.3, pp.358-367.
Colmenares, W. y Tadeo, F. (2005), Apuntes Sobre Control Robusto y Multiobjetivo de Sistemas.
Equinoccio. Miranda, Venezuela.
Dorato, P., Tempo R. y Muscato, G. (1993), Bibliography on Robust Control, Automatica, Vol. 29, No.1,
pp. 201-213.
Doyle, J., Glover, K., Khargonekar, P. y Francis, B. (1989), State-Space Solutions to Standard H2 and H∞
Control Problems, Transactions on Automatic Control, Vol. 34, No. 8, pp. 831-846.
Doyle, J. y Francis, B. (1992) Feedback Control Theory. Macmillan Publishing Company. New York.
Francis, B. (1987), A Course in H∞ Control Theory. Lecture Notes in Control and Information Sciencies,
vol. 88 , Springer Verlag.
Gahinet, P., Nemirovski, A., Luab, A. y Chillaly, M. (1995), LMI control toolbox, The Math Works Inc.
Acuña, W. y Rios, A. (2007), H2 /H∞ Multiobjectives for Fault Detection in Uncertain Polyto
yd, S., El Chaoui, L., Feron, E. y Balakrishnan, V. (1994), Linear Matriz Inequalities in System
Control Theory. Society for Industrial and Applied Mathematics. Vol.15. Filadelfia, EE.UU.
G., Doyle, J., Glover, K., Packard, A. y
Musyn Inc. and the MathWorks, Inc, Natick, MA, EE.UU.
s, C. y Trofino, A. (1999), Sufficient LMI Conditions for Output Fee
Transactions on Automatic Control, Vol. 44, No.5, pp. 1053-1057.
C. (1984), linear System Theory and Desing, Holt, Rinehart and Winston
iang, R. y Safonov, M. (1992), Robust Control Tolbox, The Math Works,
H∞ Design with pole placement constrai

Bibliografía 97
Gahinet, P., Nemirovskii, A., Laub, A. y Chilali, M. (1996), LMI Control Toolbox: for use with MATLAB.
The Math Works Inc.
bustness of Linear Dynamic Systems, DSCE, UNICAMP, CP 6101, 13081-970,
Campinas, SP, Brazil.
Granado, E., Mata, E., Colmenares, W., Revollar, S. y Pérez, O., Controlador PID robusto multivariable
Michalska, H. y Mayne, D. (1993), ctions on
Nemirovskii, A. y Gahinet, P. (1994), , In
Proceedings of the American Control Conference, Pp. 840-844.
Nunes, E. (2006), Análise e Síntese de Controladores e Filtros Robustos para Sistemas com Domínios
Politópicos de Incerteza, Universidade Federal de Minas Gerais, Bello Monte, MG.
Ríos, A. y Acuña, W. (2007), Detección Robusta de Fallas en Sistemas Lineales con Incertidumbres Politópicas,
Mérida, Venezuela.
niversidad de Sevilla, España.
érida, Venezuela.
Sán n Wiley & Sons,
ns and Methods, Vol. 8, pp. 63-89.
Geromel, J. (2005), Ro
basado en ILMI, Universidad Simón Bolívar, Dpto. Procesos y Sistemas, Caracas 1080, Venezuela.
Robust Receding Control of Nonlinear Systems, IEEE Transa
Automatic Control, AC-36, pp. 1623-1632.
The Projective Method for solving Linear Matriz Inequalities
Ríos, A. y Rivas, F. (2008), ∞H Control by Extended Static Output Feedback, Mérida, Venezuela.
Ríos, A. y Acuña, W. (2008), Control Robusto por Realimentación Estática de la Salida Extendida, Mérida,
Venezuela.
Rodríguez, F. y López, M. (1996), Control Adaptativo y Robusto. Serie Ingeniería, Número 9.
Secretariado de publicaciones de la U
Rosales, I. (2003), Diseño de Controladores Robustos por Asignación de Polos Vía LMI, Universidad
de los Andes, M
Rotea, M. (1993), The Generalized H2 Control Problem. Automatic, Vol. 29, No. 2.
chez, R. y Sznaier, M. (1998), ROBUST SYSTEMS THEORY AND APPLICATIONS. Joh
INC. Canada.
Thompson, P. (1988), Program CC’s Implementations of the Wiener-Hopf LQG optimal control problem,
Optimal Control Applicatio
Trofino, A. (2000), control robusto, Universidad Federal de Santa Catarina, Florianápolis.

Bibliografía 98
Vandenberghe, L. y Boyd, S. (1994), A Primal-Dual Potential Reduction Method for Ploblems Involving Matrix
Inequalities. Mathematical Programming Series B.
Wa n LMI Approach to Static Output Feedback Stabilization of Linear System.Control
Za s.
Zh Riccati equetion approach to H∞ optimization. Systems and
Winston, W. (1994), operation research: applications & algorithms,Durbury Press, 3ra edición.
ng y Zhang (2001), A
Theory and Aplications, Vol.18, No. 6, Beijing, China.
mes, G. y Francis, B. (1983), Feedback, Minimax Sensitivity and Optimal Robustness, IEEE Tran
Automat.Contr., Vol.AC-28, No. 5, pp. 585-601.
ou, K. y Khargonekar, P. (1998), An algebraic
Control Letters, Vol. 11, pp. 85-91.

A
Lo strados se encuentran en el CD anexo a este
Eje es singulares
apítulo 4
Ejemplo C_O_Introductorio.m: Estudio de la controlabilidad y observabilidad para el sistema incierto
Ejemplo 41.m: Controlador con
péndice A
s script usados en Matlab para obtener los resultados mo
documento y los mismos están identificados por capítulos como se muestra a continuación:
Capítulo 2
mplo 2.5.m: Descomposición en valor
C
2H Kxu =
Ejemplo 42.m: Controlador con 2H Kxu = y ubicación de polos
Ejemplo 43.m: Controlador con 2H Kyu =
Ejemplo 44.m: Controlador con 2H Kyu = y ubicación de polos
Ejemplo 45.m: Controlador con ∞H Kxu =
Ejemplo 46.m: Controlador con ∞H Kxu = y ubicación de polos
Ejemplo 47.m: Controlador con ∞H Kyu =
Ejemplo 48.m: Controlador con ∞H Kyu = y ubicación de polos
Capítulo 5
Ejemplo EcuacionesCaldera.m
Ejemplo C_O_Caldera.m
Ejemplo51.m: Controlador con 2H Kxu =
Ejemplo52.m: Controlador con 2H Kxu = y ubicación de polos

Apéndice A 100
Ejemplo53.m: Controlador con 2H Kyu =
Ejemplo54.m: Controlador con 2H Kyu = y ubicación de polos
Ejemplo55.m: Controlador con ∞H Kxu =
Ejemplo56.m: Controlador con ∞H Kxu = y ubicación de polos
Ejemplo57.m: Controlador ∞H con Kyu =
Ejemplo58.m: Controlador ∞H con Kyu = y ubicación de polos