Context influences on the preparation and execution of reaching movements
15
Context influences on the preparation and execution of reaching movements Giovanni Mirabella Department of Human Physiology, University of Rome “La Sapienza”, Rome, Italy Pierpaolo Pani Department of Human Physiology and Pharmacology and Dottorato di Ricerca in Neurofisiologia, University of Rome “La Sapienza”, Rome, Italy Stefano Ferraina Department of Human Physiology and Pharmacology, University of Rome “La Sapienza”, Rome, Italy The ability of rapidly adapting our motor behaviour in order to face the unpredictable changes in the surrounding environment is fundamental for survival. To achieve such a high level of efficiency our motor system has to assess continuously the context in which it acts, gathering all available infor- mation that can be relevant for planning goal-oriented movements. One still-debated aspect of move- ment organization is the nature and timing of motor planning. While motor plans are often taken to be concerned with the setting of kinematic parameters as a function of perceptual and motor factors, it has been suggested that higher level, cognitive factors may also affect planning. To explore this issue further, we asked 18 right-handed human participants to perform speeded hand-reaching movement toward a visual target in two different experimental settings, a reaction time (RT) paradigm (go-only task) and a countermanding paradigm. In both tasks participants executed the same movements, but in the countermanding task no-stop trials were randomly intermixed with stop trials. In stop trials participants were required to withhold the ongoing movement whenever a stop signal was shown. It is known that the presence of stop trials induces a consistent increase of the RTs of no-stop trials with respect to the RTs of go-only trials. However, nothing is known about a similar effect for movement times (MTs). We found that RTs and MTs exhibit opposing tendencies, so that a decrease in the RT correspond to an increase in the MT and vice versa. This tendency was present in all our participants and significant in 90% of them. Furthermore we found a moderate, but again very consistent, anticorrelation between RTs and MTs on a trial-by-trial base. These findings are consistent with strategic changes in movement programmes for the very same movements under different cognitive contexts, requiring different degrees of feedback-driven control during movement. Keywords: Motor programme; Reaction time; Movement time; Countermanding; Human; Stop-task. Correspondence should be addressed to Giovanni Mirabella, Department of Human Physiology and Pharmacology, University of Rome “La Sapienza”, Piazzale Aldo Moro 5, 00185 Rome, Italy (E-mail: [email protected]) This work was supported by Grant 2005051741 from the Ministrero Italiano dell’ Universita ` e Ricerca (MIUR) assigned to Stefano Ferraina. 996 # 2008 Psychology Press, an imprint of the Taylor & Francis Group, an Informa business http://www.psypress.com/cogneuropsychology DOI:10.1080/02643290802003216 COGNITIVE NEUROPSYCHOLOGY, 2008, 25 (7–8), 996–1010
-
Upload
brescia-it -
Category
Documents
-
view
0 -
download
0
Transcript of Context influences on the preparation and execution of reaching movements

Context influences on the preparation and execution ofreaching movements
Giovanni MirabellaDepartment of Human Physiology, University of Rome “La Sapienza”, Rome, Italy
Pierpaolo PaniDepartment of Human Physiology and Pharmacology and Dottorato di Ricerca in Neurofisiologia, University of Rome “La Sapienza”,
Rome, Italy
Stefano FerrainaDepartment of Human Physiology and Pharmacology, University of Rome “La Sapienza”, Rome, Italy
The ability of rapidly adapting our motor behaviour in order to face the unpredictable changes in thesurrounding environment is fundamental for survival. To achieve such a high level of efficiency ourmotor system has to assess continuously the context in which it acts, gathering all available infor-mation that can be relevant for planning goal-oriented movements. One still-debated aspect of move-ment organization is the nature and timing of motor planning. While motor plans are often taken tobe concerned with the setting of kinematic parameters as a function of perceptual and motor factors, ithas been suggested that higher level, cognitive factors may also affect planning. To explore this issuefurther, we asked 18 right-handed human participants to perform speeded hand-reaching movementtoward a visual target in two different experimental settings, a reaction time (RT) paradigm (go-onlytask) and a countermanding paradigm. In both tasks participants executed the same movements, butin the countermanding task no-stop trials were randomly intermixed with stop trials. In stop trialsparticipants were required to withhold the ongoing movement whenever a stop signal was shown.It is known that the presence of stop trials induces a consistent increase of the RTs of no-stoptrials with respect to the RTs of go-only trials. However, nothing is known about a similar effectfor movement times (MTs). We found that RTs and MTs exhibit opposing tendencies, so that adecrease in the RT correspond to an increase in the MT and vice versa. This tendency was presentin all our participants and significant in 90% of them. Furthermore we found a moderate, butagain very consistent, anticorrelation between RTs and MTs on a trial-by-trial base. These findingsare consistent with strategic changes in movement programmes for the very same movements underdifferent cognitive contexts, requiring different degrees of feedback-driven control during movement.
Keywords: Motor programme; Reaction time; Movement time; Countermanding; Human; Stop-task.
Correspondence should be addressed to Giovanni Mirabella, Department of Human Physiology and Pharmacology, University
of Rome “La Sapienza”, Piazzale Aldo Moro 5, 00185 Rome, Italy (E-mail: [email protected])
This work was supported by Grant 2005051741 from the Ministrero Italiano dell’ Universita e Ricerca (MIUR) assigned to
Stefano Ferraina.
996 # 2008 Psychology Press, an imprint of the Taylor & Francis Group, an Informa business
http://www.psypress.com/cogneuropsychology DOI:10.1080/02643290802003216
COGNITIVE NEUROPSYCHOLOGY, 2008, 25 (7–8), 996–1010

Movement’s flexibility in primates is remarkable,especially in view of the need for compensatingthe continuous changes in the environment and/or in the body segments positions. To organizemotor actions efficiently, the nervous system hasto continuously process contextual informationand update the output accordingly.
It has been shown that both reaction time (RT;e.g., Henry & Rogers, 1960; Riehle & Requin,1995; Rosenbaum, 1980) and movement time(MT; e.g., Adam et al., 2000; Glencross, 1980;Vindras & Viviani, 2005) can be influenced bythe experimental context.
An example of contextual influence on the RTis given by the preparation paradigm (for a review,see Riehle, 2005). In this task two signals are pre-sented successively to the participant. The firstprovides information on what to do and/or whento act after the presentation of the second signal(go signal). Using this paradigm it has beendemonstrated, both in humans and in monkeys,that giving prior information about movementparameters shortened the RT (Lepine,Glencross, & Requin, 1989; Riehle & Requin,1989, 1995; Rosenbaum, 1980). Conversely, inall these experiments the MT did not show anydifference despite the nature or the amount ofinformation. In tasks in which participants per-formed sequences of discrete movements (e.g.,Klapp, 1996; Sternberg, Monsell, Knoll, &Wright, 1978), the RT of the first movementwas found to increase with the number of move-ments required. This was called “length effect”and was attributed to the greater time neededfor planning more complex motor sequences(Henry & Rogers, 1960).
Evidence for contextual influence on MTcomes from the so-called “one-target advantage”effect. First reported by Glencross (1980), theeffect consists in the fact that MTs of rapidaimed hand movements to a target are shorterwhen the movements are performed alone ratherthan when they are performed as the first of atwo-step sequence. Nevertheless, even thoughthis paradigm induces a change in the durationof movement execution, Fischman and Reeve(1992) hypothesized that this phenomenon is the
output of a behavioural strategy coded during theRT.
These results, and others from experimentsusing similar approaches (e.g., Fitts & Peterson,1964; Henry, 1961; Sanders, 1983), suggest thatRT and MT tap into independent processingstages and that processes involved in responsepreparation have no effect on the successiveonline control stage.
However, strict independence of MT from RTmay not be typical of all conditions. For instance, ithad been shown that, under choice conditions, thelength effect can be reversed (the first RT in asequence decreases with the length of the motorsequence; Rosenbaum, Hindorff, & Munro,1987) or it can even disappear (the first RT in asequence is not different from the RT of thesecond movement; Khan, Lawrence, Buckolz, &Franks, 2006). The interpretation is that partici-pants begin to execute the first movement whilecontinuing to programme the remaining sequence.
Similarly, there is evidence that the one-targetadvantage effect is due to the computationalresources used during the execution of the firstmovement for programming the second step(Adam et al., 2000; Chamberlin & Magill, 1989;Vindras & Viviani, 2005). Therefore these datasupport the possibility of an online planningstrategy.
Thus, according to the circumstances, partici-pants may use either an advance programmingstrategy, whereby the plan is defined before thestart of movement, or an online programmingstrategy, whereby planning continues during themovement.
To explore contextual effects on both RT andMT of reaching movements, we compared theperformance of human participants in a RT task,where participants were required to reach towardperipheral targets (go-only trials), with the per-formance in a countermanding task. In the coun-termanding task, participants had to make thesame reaching movements (no-stop trials) asthose required in the go-only trials, unless a stopsignal was presented. In that case, participantswere instructed to withhold the movement (stoptrials). The advantage of this design is that
COGNITIVE NEUROPSYCHOLOGY, 2008, 25 (7–8) 997
CONTEXT INFLUENCES ON REACHING MOVEMENTS

similar behavioural outputs could be studied intwo different cognitive contexts.
It is well known that introducing stop trialsinduces a consistent increase of the RTs of no-stop trials as compared to the RTs of go-onlytrials tested in a separate block (e.g., Lappin &Eriksen, 1966; Logan, 1981; Mirabella, Pani,Pare, & Ferraina, 2006). Presumably, participantsremain alert to the possible presence of stop signalsto maximize the number of correct responses tothe stop trials. This is obtained by maintaining atonic readiness for inhibiting movements whileresponding to the no-stop trials (see Logan,1994, for a review). However, to our knowledgeeffects of stop signals on MTs have not beenreported.
Here we replicated the observation that RTs inno-stop trials are influenced by the possible pre-sence of stop signals. More importantly,however, we also show that MTs are also influ-enced. These findings support the notion thatmotor planning can be altered by cognitivefactors in subtler ways than was previouslysuggested, possibly by involving strategic changesin the nature of planning operations as a functionof contextual factors.
Materials and method
Participants and apparatusA total of 18 participants between the ages of 22and 26 years (mean 24.2 + 0.2), with normal orcorrected-to-normal visual acuity were tested.Handedness was assessed using the Edinburghhandedness inventory, and only participants witha right-hand preference were included. Each par-ticipant completed one experimental session on asingle day using the right arm.
Participants were seated in a darkened, sound-attenuated chamber. Their head was stabilized bya chin rest so that their eyes were 40 cm awayfrom a 2100 PC monitor (CRT non-interlaced,refresh rate 85 Hz, 800 � 600 resolution, 32-bitcolour depth) where visual stimuli were presented.Stimuli consisted of red circles (2.434 cd/m2) of2.58 diameter against a dark background ofuniform luminance (,0.01 cd/m2). The PC
monitor was coupled with a touch screen(MicroTouchTM, sampling rate 200 Hz) fortouch positions monitoring. The presentation ofstimuli and data acquisition was controlled bythe CORTEX real-time control system (http://www.cortex.salk.edu). The temporal arrangementsof stimulus presentation were synchronized withthe monitor update rate. All participants gavetheir informed consent. All experimental pro-cedures were approved by the local ethics boardand were performed in accordance with theethical standards laid down in the 1964Declaration of Helsinki.
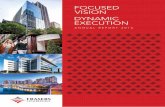
TasksParticipants performed reaching movements intwo different experimental conditions (Figure 1).
Figure 1. Temporal sequence of the visual displays for each task. All
trials began with the appearance of a central stimulus. The
participant had to reach and hold it for a variable period of time.
In the go-only task (a) and in the no-stop trials of the
countermanding task (b1) the central stimulus disappeared, and,
simultaneously, a target appeared at one of two possible locations,
either to the right or to the left of the central stimulus.
Participants were instructed to perform a speeded reaching
movement toward the peripheral target. In about 33% of trials
(stop trials) of the countermanding task, the central stimulus (stop
signal) reappeared at variable delays after the go signal,
indicating the participant to cancel the pending movement (b2).
The dotted circle (which was not visible to the participants)
indicates the size of the tolerance window for the touches (3.5 cm
in diameter).
998 COGNITIVE NEUROPSYCHOLOGY, 2008, 25 (7–8)
MIRABELLA, PANI, FERRAINA

Each experimental condition was presented in sep-arate blocks, and the order of presentation wascounterbalanced across participants. Restingperiods were allowed between blocks if requested.At the beginning of each block, 20 practice trialswere given to all participants to make themfamiliar with the apparatus and the task at play.
All trials began with the appearance of a stimu-lus at the centre of the display. Participants wererequired to touch it with the index finger for avariable period of 500–800 ms (holding time).Thereafter, in the go-only task (Figure 1a) thecentral stimulus disappeared, and, simultaneously,a target appeared (go-signal) on the horizontalplane randomly at one of two locations, 11.3degrees (8 cm) to either the right or the left ofthe central stimulus. Participants had to performa speeded reaching movement toward the periph-eral target. The countermanding task consisted ofa random mix of 66% of no-stop trials (Figure 1,b1), and 33% of stop trials (Figure 1, b2). No-stop trials were identical to go-only trials.
Stop trials differed from the no-stop trialsbecause at a variable delay (stop signal delay,SSD) after the presentation of the go-signal thecentral stimulus reappeared (stop signal), andparticipants had to inhibit their movement. Thelength of the SSDs was changed adaptively bymeans of a staircase procedure (Osman,Kornblum, & Meyer, 1986, 1990) to maintainparticipants around a 50% success rate in with-holding the response in stop trials. The SSD dur-ation varied from one stop trial to the nextaccording to the behavioural performance of theparticipants: If they succeeded in withholdingthe response, then the SSD increased by 2refresh rates (or 23.5 ms), if they failed, the SSDdecreased by the same amount of time. Since itis well known that RTs are shorter when a targetis presented on the same side of the reachingarm than when it is presented on the oppositeside (for a review see Marzi, Bisiacchi, &Nicoletti, 1991), we used two independent stair-cases for left and right targets. Both staircasesstarted from a SSD of 129.4 ms, which pilotexperiments showed to be an appropriate delayfor quickly obtaining the desired amount of
inhibition in stop trials. In comparison with fixedSSDs, this procedure requires fewer stop trials toobtain accurate estimates of stop signal RT(SSRT; Band, van der Molen, & Logan, 2003).
Before performing the countermanding task,participants were instructed that in some stoptrials they would not be able to cancel the move-ment and that they should not be troubled bytheir performance. We stressed the importanceof responding to the visual target as fast as possibleand not to let the stop signal appearance interferewith the performance. Furthermore, to discourageparticipants from adopting the strategy of slowingdown responses in order to cancel more easily theirmovements, we set an upper RT limit for no-stoptrials. Whenever the RTs were longer than500 ms, no-stop trials were signalled as errors tothe participants and were aborted. Error trialswere not repeated.
In the go-only block, participants completed200 trials whereas the countermanding block con-sisted of 300 trials: 200 no-stop and 100 stop trials.Participants were given an auditory feedback toinform whether their responses were correct.
Data analysisTrials were excluded from the analysis if the per-ipheral target was touched outside a tolerancewindow with a diameter of 3.4 cm.
For each participant, an average delay (SSDm)was computed from all the SSD values used in theblock. Then the SSRT was estimated by subtract-ing the SSDm from mean RT of correct no-stoptrials (Band et al., 2003)
Results
Reaction and movement time in no-stop versusgo-only trialsFigure 2 shows, for a representative participant, themainfinding of the present study—namely, the exist-ence of an opposed effect of experimental setting onRTs and MTs. As expected (see Logan, 1981;Mirabella et al., 2006; Rieger & Gauggel, 2002),the duration of RTs is longer for no-stop trialsthan for go-only trials (Figure 2a; 369.6 + 4.9 SEvs. 282.8 + 4.2 SE ms; Kolmogorov–Smirnov
COGNITIVE NEUROPSYCHOLOGY, 2008, 25 (7–8) 999
CONTEXT INFLUENCES ON REACHING MOVEMENTS

test, p , .0001). The duration of the MTs displaysthe opposite tendency (Figure 2b), being shorterfrom no-stop trials than for go-only trials (260.5+ 4.0 SE vs. 334.4 + 6.6 SE ms; Kolmogorov–Smirnov test, p , .0001).
To check whether at the population level weobtained the same results, we used two differentapproaches. First of all, we considered how manyparticipants exhibit significantly slower RTs andsignificantly faster MTs in no-stop trials withrespect to go-only trials for each movement direc-tion.We found that in 16 out of 18 participants (or88.8%) the duration of RTs was longer in no-stop
than in go-only trials while the duration of thecorresponding MTs was shorter for the formertrial types (Kolmogorov–Smirnov test, ps ,
.005). Therefore in the overwhelming majority ofthe participants RTs and MTs showed oppositetendencies in two experimental contexts. The 2other participants had faster RTs for go-onlythan for no-stop trials (Kolmogorov–Smirnovtest, ps , .005), as all the others, but the durationof MTs was not significantly different eitherfor one (p ¼ .11 for right reaches) or for both(p ¼ .86 for right and p ¼ .11 for left reaches)movement directions.
Figure 2. Reaction times (RTs) and movement times (MTs) for reaching movement toward a left target in one example participant. Top row
illustrates the RTs (a). Left panel shows the cumulative distributions of RTs in go-only (solid black trace) and no-stop trials (solid grey trace).
Central and right panels show, respectively, the histograms of RTs in go-only and no-stop trials. Bottom row shows MTs (b). Left panel
reports the cumulative distributions of MTs in go-only (dotted black trace) and no-stop trials (dotted grey trace). Central and right
panels show, respectively, the histograms of MTs for go-only and no-stop trials.
1000 COGNITIVE NEUROPSYCHOLOGY, 2008, 25 (7–8)
MIRABELLA, PANI, FERRAINA

As a second approach, we considered the popu-lation as a whole by collapsing single participants’data together. Figure 3 shows that the overallresult is very close to that of the representative par-ticipant; RTs are significantly longer for no-stoptrials than for go-only trials (395.9 + 3.9 SEvs. 283.0 + 6.3 SE, Kolmogorov–Smirnov test,p , .0001) and vice versa for MTs (276.0 +11.4 SE vs. 360.3 + 13.4 SE, Kolmogorov–Smirnov test, p , .0001).
As a next step, we contrasted the mean values ofthe RTs (+SE) across the 18 participants in eachexperimental condition with the correspondingaverage values of the MTs (+SE) for movementstoward left and right targets (see Figure 4 andTable 1).
An analysis of variance (ANOVA) on averageRTs (two-way repeated measures ANOVA), withtrial types (no-stop, go-only trials) and target pos-ition as factors, revealed a main effect of trial type,F(1, 17)¼ 246.7, p, .00001, and of target position,F(1, 17) ¼ 35.3, p , .00001, but no interaction,F(1, 17) ¼ 0.13, p ¼ .7. No-stop trials had thelongest RTs. In addition participants were fasterfor reaches toward a target placed in the righthemifield.
Experimental conditions have an oppositeeffect on the MTs . The same analysis of variance
done on RTs (two-way repeated measuresANOVA; factors: trial type and target position)was repeated on MTs. This time, we found boththe two main effects, trial type, F(1, 17) ¼ 36.1,p , .00001, target position, F(1, 17) ¼ 110.8,p , .00001, and a significant interaction,F(1, 17) ¼ 8.6, p , .001. Post hoc analysisshowed that the duration of MTs was differentin all four conditions (post hoc Tukey HSD,MSE ¼ 106.87, ps , .01).
To compare RTs and MTs directly, for eachparticipant we computed a normalized index ofthe difference (RMI) as:
RMI ¼ (RT�MT)=(RTþMT)
This index can take a value between 21 and 1.RMI equal to zero indicates no difference, valuesless than zero indicate that MT was bigger thanthe corresponding RT, while values bigger than
Figure 3. Reaction times (RTs) and movement times (MTs) for
reaching movements toward left target across the entire
population (n ¼ 18). Panel a shows the cumulative distributions
of RTs in go-only (solid black trace) and no-stop trials (solid grey
trace). Panel b shows the cumulative distributions of the
corresponding MTs in go-only (dotted black trace) and no-stop
trials (dotted grey trace). The cumulative distributions were
obtained by collapsing together the single RTs of no-stop or go-
only trials of all participants.
Figure 4. Changes of duration of reaction times (RTs) and
movement times (MTs) in no-stop and go-only trials. Mean
values of RTs (+SE, solid black trace), MTs (+SE, dotted
black trace) for each trial type across all participants (n ¼ 18) are
plotted for reaching movements directed to the left (a) and to
right hemifield (b). Panel c shows the mean values (+SE) across
all participants (n ¼ 18) of the index of the normalized
difference between RT and MT (RMI).
COGNITIVE NEUROPSYCHOLOGY, 2008, 25 (7–8) 1001
CONTEXT INFLUENCES ON REACHING MOVEMENTS

zero indicate the opposite. The average values(+SE) of RMI across the 18 participants in eachexperimental condition for reaching movementstoward left and right targets are illustrated inFigure 4c. RMI for no-stop trials was always posi-tive for both right (0.27 + 0.02) and left reaches(0.18 + 0.02). The opposite pattern was foundfor go-only trials (RMI right target: 2 0.04 +0.02; RMI left target 2 0.11 + 0.02). Thisanalysis confirmed, once more, that trial typeswith higher RTs are characterized by lower MTs(no-stop trials) and vice versa (go-only trials).
Given that average values of RTs andMTs haveopposite tendencies, we wanted to explore thepossibility that even the variability of their distri-butions exhibit the same pattern.Measures of varia-bility give an indication of the spread of thedistribution of data points. For each trial type andfor each movement direction, we computed theinterquartile range (IQR). Figure 5a shows thatno-stop trials display a high variability for RTsand a corresponding small variability for MTs.The opposite is true for the go-only trials—namely, they have a low variability for RTs andsmall variability for MTs. A two-way repeatedmeasures ANOVA on mean IQRs for RTs withtrial types (no-stop vs. go-only trials) and targetposition (right vs. left) as factors revealed a signifi-cant main effect of trial types, F(1, 17) ¼ 64.8, p, .0001, and a significant interaction, F(1, 17) ¼5.5, p , .05, while the main effect of position wasnot significant, F(1, 17) ¼ 0.55, p ¼ .47. Post hocanalyses showed that RTs of no-stop trialsfor right reaches have the highest IQRs, while
go-only trials for right reaches had the lowestIQRs (Tukey HSD, MSE ¼ 88.7, p , .0001).We followed the same approach on the meanIQRs of MTs, finding significant main effects forboth trial type, F(1, 17) ¼ 6.8, p , .05, and targetposition,F(1, 17)¼ 7.2, p, .05, but no interaction,F(1, 17) ¼ 1.9, p ¼ .18. These effects were deter-mined by a lower variability of MT of no-stopthan go-only trials and by a lower variability ofMT for reaches directed to the right side. Overall,these results suggest that trial types with awider dis-tribution of RTs tend to have corresponding nar-rower distributions of MTs.
To directly contrast IQR values of RTs andMTs, we computed the index of the normalized
Table 1. Mean RTs, MTs, and TTs for no-stop and go-only trials and for each target position and corresponding mean difference across all
participants
Target right Target left
No-stop Go-only
Difference
(no-stop – go-only) No-stop Go-only
Difference
(no-stop – go-only)
RT 377.1 + 6.1 262.5 + 5.1 114.6 + 7.8 395.9 + 3.9 283.0 + 6.3 112.9 + 7.3
MT 218.7 + 7.9 288.8 + 11.9 –70.1 + 12.9 276.0 + 11.4 360.3 + 13.4 –84.4 + 13.3
TT 595.8 + 8.2 551.3 + 12.2 44.5 + 12.4 671.9 + 11 643.3 + 14.4 28.6 + 12.7
Note: Mean values + standard errors. Participants: n ¼ 18. RT ¼ reaction time. MT ¼ movement time. TT ¼ total time.
Figure 5. Variability of duration of reaction times (RTs) and
movement times (MTs) in no-stop and go-only trials. Panel a
shows the mean IQR values of RTs (+SE, solid trace) and MTs
(+SE, dotted trace) in each experimental condition for reaching
movements toward left (grey trace) and right targets (black trace)
across all participants (n ¼ 18). Panel b illustrates the mean
values (+SE) across all participants (n ¼ 18) of the index
of the normalized difference between the IQR of RT and of MT
(IQR-RMI).
1002 COGNITIVE NEUROPSYCHOLOGY, 2008, 25 (7–8)
MIRABELLA, PANI, FERRAINA

difference (IQR-RMI) as follows:
IQR-RMI ¼ (IQR-RT)� (IQR-MT)=(IQR-RT)þ (IQR-MT)
As shown in Figure 5b, no-stop trials had positiveIQR-RMI averages for both right (0.48 + 0.04)and left reaches (0.37 + 0.03) while go-onlytrials had always negative IQR-RMI averages(RMI right target: 2 0.16 + 0.05; RMI lefttarget 2 0.17 + 0.04). In summary no-stop trialswere characterized by higher variability of RTsand lower variability of MTs than go-only trials.
This symmetrical pattern of RTs and of MTsled us to wonder whether the total duration of amovement in a given direction (e.g., to the righthemifield) was fixed across the two tasksemployed. To verify this possibility we comparedthe total time (TT) across the two trial types bysimply adding the RT duration in a given con-dition to the corresponding MT (see Table 1).TT was significantly longer for no-stop trialsthan for go-only trials, two-way ANOVArepeated measures, factor trial type, F(1, 17) ¼
9.1, p , .01; TTs toward the left side wereslower than those toward the right side, F(1, 17)¼ 106.8, p , .0001, and there was an interactionbetween the two factors, F(1, 17) ¼ 5.4, p , .05.Post hoc analysis showed that the duration ofTTs was different in all four conditions (post hocTukey HSD, MSE ¼ 207.3, ps , .0001)
Correlation between reaction and movement timeThe results of previous analyses suggest the possi-bility of the existence of a trial-by-trials relation-ship between RTs and MTs. In order to provideevidence to support this hypothesis we computedthe Spearman’s rank correlation coefficient.
Figure 6 illustrates the results in an exampleparticipant for reaching movements directedtoward left and right targets, separately for eachexperimental context. The correlation betweenthe RTs and MTs was always highly significant(ps , .001) even though Spearman’s coefficientvalues were moderate, ranging from –.36 to –.40.Most importantly, in all instances RTs and MTsshowed an inverse relationship—namely, a
decrease of the RT corresponded to an increaseof the MT and vice versa.
Very similar results were obtained at populationlevel. First of all, the great majority of participantsshowed significant correlations between RTs andMTs in both tasks (Figure 7a). As for as no-stoptrials is concerned, 83.3% of the participants had asignificant correlation for left and 77.8% for right.In go-only trials, 83.3% of the participants had sig-nificant correlations for left movements and 72.2%for right movements. Overall, considering all par-ticipants and the four conditions, MTs and RTswere significantly correlated 57 times out of 72(or 72.2%). Importantly, in 56 cases out of 57 (or98.2%), MTs and RTs were anticorrelated.
On the other hand, the degree of correlation wasmoderate, as shown in Table 2 and Figure 6b. Afterapplying Fisher’s Z-transformation to Spearman’srank correlation coefficients, we found that the
Figure 6. Scatterplots of reaction times (RTs) and movement times
(MTs) in one example participant for reaching movement toward a
left target in no-stop (a) and go-only trials (b). Top panels show the
scatterplots for reaching movements toward a right target while
bottom panels show the scatterplots toward left targets. In each
panel is indicated the value of the Spearman’s rank correlation
coefficient and the corresponding p value.
COGNITIVE NEUROPSYCHOLOGY, 2008, 25 (7–8) 1003
CONTEXT INFLUENCES ON REACHING MOVEMENTS

degree of correlation was not different either acrosstrial types and across target position: two-wayANOVA, trial types, F(2, 17) ¼ 0.008, p ¼ .93;target position, F(1, 17) ¼ 3.4, p ¼ 0.08; inter-action, F(2, 17) ¼ .015, p ¼ .9.
Taken together these results indicate the exist-ence of a moderate but very consistent anticorrela-tion between RTs and MTs.
AccuracyThe behavioural performance of participants wassimilar in all experimental conditions (Table 3).Thus, the relationship between RTs and MTscannot be ascribed to a change in overall accuracyof participants. As expected, the mean number ofmistakes in no-stop was significantly higher thanthose in go-only trials (13.8 + 1.6 vs. 1.4 +0.2); two-way repeated measures ANOVA, trialtype F(1, 17)¼ 48.4, p , .0001. Furthermore par-ticipants performed worse when movements were
directed toward left than right targets (meannumber of mistakes 9 + 1.7 vs. 6.3 + 1.3);target position, F(1, 17) ¼ 5.7, p , .05. No inter-action between target position and trial type wasfound, F(1, 17) ¼ 3.3, p ¼ .08. It is noteworthythat 92.2% of the mistakes in no-stop trials weredue to the exceeding of RT upper limit, as evi-dence that participants, despite our verbal instruc-tions, could not refrain from slowing down theirmovements during the countermanding task.Participants never went to the wrong targets ortouched the target outside the tolerance window.
Stopping performanceFinally, even though the main purpose of thepresent paper was not to study the stopping per-formance, nonetheless in this section we report allsalient results about movement cancellation. Onaverage, the length of the SSD allowing 50% ofstop successful trials for right-arm movement was173 + 11.8 ms, while movements to the left siderequired a slightly longer SSD, 195.2 + 7.7 ms.The two values were not significantly different,paired t test, t(17) ¼ 1.62, p ¼ .11.
The most important behavioural index that canbe derived from the countermanding task is thelength of time required to cancel a commandedreaching movement, the stop signal reaction time(SSRT). This value cannot be measured directlybut can be estimated from the behavioural per-formance in the countermanding task using therace model developed by Logan (see Method;Logan, 1994; Logan & Cowan, 1984).
We found that the average SSRT (+SE) acrossall of the participants was 184.8 + 7.5 ms. There
Figure 7. Correlation between reaction times (RTs) and movement
times (MTs) across all participants (n ¼ 18). Panel a shows, for
each experimental condition and target position, the percentage of
cases in which the Spearman’s rank correlation coefficient was
significant at p , .05. Panel b shows the mean values (+SE) of
the Spearman’s rank correlation coefficients for reaching
movements toward left and right targets, computed across the
entire population.
Table 3. Percentage of errors and correct trials across all participants
in each experimental contexts for movements toward right and left
targets
Target right Target left
% Wrong % Correct % Wrong % Correct
No-stop 11.6 88.4 16.3 83.7
Go-only 1.1 98.9 1.9 98.1
Note: Participants: n ¼ 18.
Table 2. Mean values of Spearman’s coefficient for no-stop and
go-only trials and for each target position across all participants
Target right Target left
No-stop 2 .24 + .05 2 .31 + .04
Go-only 2 .24 + .04 2 .32 + .04
Note: Mean values + standard errors.
1004 COGNITIVE NEUROPSYCHOLOGY, 2008, 25 (7–8)
MIRABELLA, PANI, FERRAINA

was no significant difference between the SSRTassociated with the inhibition of movementstoward the left versus the right target (184.5+ 8.8 ms vs. 185.2 + 12.4 ms); t(17) ¼ 0.05,p ¼ .96. This finding is odd with respect to ourprevious result where we showed that partici-pants were always faster in withholding reachingmovements toward visual targets appearing onthe same side of the reaching arm (Mirabellaet al., 2006). However in that study the SSDsused were identical and fixed spaced for bothmovement directions. In contrast, in thepresent experiment the SSDs was changedaccordingly to a staircase algorithm, indepen-dently for each side of target presentation.Further studies are needed to clarify this issue.
The race model assumes that the outcome ofthe countermanding paradigm depends on a racebetween two processes: (a) a go process initiatedby the go signal that can lead to the execution ofthe reaching movement; and (b) a stop processinitiated by the stop signal that can inhibit thecommanded movement. A central assumption ofthe race model is that go and stop processes arestochastically independent (Logan & Cowan,1984). To test this assumption, we consideredthe RTs of the reaching movements that escapedinhibition (stop-failure trials). According to themodel the mean RT in stop-failure trials shouldbe faster than the mean RT in the no-stop trials.We followed two different approaches. First ofall, we considered howmany times each single par-ticipant fulfilled the above prediction. The RTs instop-failure trials were significantly shorter thanthe RTs in the no-stop trials (Kolmogorov–Smirnov test; ps, .05) in 25/36 (18 participants �two targets) cases (or 69.9%). Then we used ananalysis of variance (two-way repeated measuresANOVA) on average RTs, with trial types (no-stop, stop-failure trials) and target position asfactors. We found that RTs of stop-failure trialswere significantly faster than RTs of no-stoptrials (358.9 + 6.3 ms vs. 386.5 + 3.9 ms),F(1, 17) ¼ 38.1, p , .0001, and that movementstoward the left side were slower (362.6 + 6.2 msvs. 382.9 + 4.7 ms), F(1, 17) ¼ 14.7, p , .001.There was no significant interaction, F(1, 17) ¼
0.07, p ¼ .79. In conclusion, our data support theassumption of the independence between stopand go process.
Discussion
The aim of the present paper was to investigate theeffect of cognitive context on movement prep-aration and movement execution. We tackledthis issue by comparing the behavioural perform-ance, in terms of RTs and MTs, of human partici-pants who were required to execute similarreaching movements toward peripheral targetsunder two different cognitive contexts. In bothexperimental conditions participants had toexecute speeded reaches, but in the countermand-ing context they were aware of the fact that aninfrequent stop signal could be presented requiringthem to withhold the planned movement. Asexpected, the presence of stop signals causes thelengthening of the RTs in no-stop trials.However, this manipulation affected also MTs,which showed an opposite tendency with respectto RTs. We interpret this finding as evidencethat the nature of the planning phase can be modi-fied by the cognitive context of the action.Presumably, in the go-only task a motor plan isformulated quickly but accurate reaching requiresfurther processing during the actual movement,probably because of an increasing need of onlinecontrol based on visual feedback. In the counter-manding task, conversely, the lengthening ofRTs caused by the presence of stop signals allowstime for a more complete planning-related proces-sing. In turn, this results in faster movementtimes—that is, the action can be performed in amore ballistic fashion without further interventionfrom control processes.
Contextual influences on RT and MT duringreaching movementsRTs of movements are affected in a wide array ofcontexts. For instance, studies exploiting the prep-aration paradigm showed that RTs were reducedwhen prior knowledge of spatial, kinematic,and/or temporal aspects of the movement are pro-vided (Lepine et al., 1989; Riehle & Requin, 1989,
COGNITIVE NEUROPSYCHOLOGY, 2008, 25 (7–8) 1005
CONTEXT INFLUENCES ON REACHING MOVEMENTS

1995; Rosenbaum, 1980). The maximal reductionof RTs occurred when a complete information wasavailable. On the other side, these authors reportedthat the corresponding MTs remain at a stablelevel regardless of the type/amount of infor-mation. The interpretation of these results (seeRiehle, 2005) was that prior information canaffect only the planning, but not the executionphase of the movement. However, the preparationparadigm can be a special instance where MTs arenot affected because the available informationallows the participants to start programming themotor plan before entering the RT epoch.Therefore in this task, the duration of the MTepoch is only related to the time required for thephysical movement of the effector.
Another example of a contextual effect on RTsis the so-called “length effect”—that is, the findingthat the RT for initiating a series of movementsincreases with the number of elements in thesequence (Henry & Rogers, 1960; Klapp, 1995;Sternberg et al., 1978; Sternberg, Wright, Knoll,& Monsell, 1980). Klapp (1995) found that thiseffect was not dependent on the number of move-ments required per se, but to the prior knowledgeof the sequence of movements that have to be exe-cuted. In fact the length effect emerged just whenparticipants knew in advance the number of move-ments to be performed (simple RT paradigm) butnot when they were not aware of it (choice RTparadigm). According to Khan et al. (2006) theabsence of the length effect in RT choice taskscan be ascribed to the fact that when the requiredresponse is unknown, in order to minimize theduration of the RT, participants adopt a strategywhereby programming is continued during move-ment execution (online programming).
Overall the evidence is in agreement withthe findings of Vindras and Viviani (2005) onthe one-target advantage effect. Recall that thiseffect consists of shorter MTs when aiming move-ments are performed in isolation rather than as thefirst part of an aiming sequence of two movements.Fischman and Reeve (1992) hypothesized that the“one target advantage” can be explained as an effectof different motor strategies coded during the RT.According to their argument the execution of the
first movement, in a sequence of two, is restrainedto allow the better execution of the second.However, Vindras and Viviani (2005) found thatthe increase of MTs of the first movement didnot depend on the characteristics of the secondmovement. This finding is compatible with theassumption that, at least under certain circum-stances, the preparation of the second movementpartially takes place during the execution of thefirst one.
If online programming is an available option,then it should be possible to create contexts inwhich online programming represents the beststrategy and vice versa. Probably, the counter-manding task created the optimal conditions forshowing such shifts of motor planning strategy.
First of all, as expected and previously reported(e.g., Emeric et al., 2007; Lappin & Eriksen, 1966;Logan, 1981; Mirabella et al., 2006), we observedthat RTs of no-stop trials in the countermandingtask are longer than RTs of analogous movementsperformed in the go-only task. This effect was veryrobust. All participants in our sample showed asignificant increase of the RTs of reaching move-ments of no-stop trials with respect to the RTsrecorded in the block of go-only trials, eventhough our experimental design included a lowprobability (.33) of stop signal trials and anupper RT limit, as well as detailed verbal instruc-tions (Logan, 1994). The more straightforwardinterpretation of this evidence is that participantsrefrain from moving the arm as long as possiblein order to maximize the number of correctresponses to the stop trials (e.g., see Logan,1994, for a review).
Secondly, we found that MTs have an oppositepattern with respect to RTs. This result was veryconsistent since 16 out of 18 participants showedthis phenomenon, while the remaining two didnot have significant differences of MTs in no-stop versus go-only trials. An hint for understand-ing this effect can be offered by finding the exist-ence of a moderate degree of trial-by-trialsanticorrelation between RT andMT. The anticor-relation implies that longer RTs correspond toshorter MTs and vice versa. An intriguing possi-bility is that the trade-off between RTs and MTs
1006 COGNITIVE NEUROPSYCHOLOGY, 2008, 25 (7–8)
MIRABELLA, PANI, FERRAINA

can be determined by the time available to themotor system to compute the movement par-ameters to reach the target. Because of thelengthening of the RTs in the no-stop trials,movement parameters (especially the position ofthe target, which can randomly appear to theright or to the left side), can be fully processedduring the RT epoch. Therefore, in this condition,there is no need for online programming. On theother hand, in the go-only trials the instructionto move as quickly as possible has the effect tospeed up movement initiation even though themotor plan had not yet completely definedbecause target selection was not completed.Hence, under these circumstances participantsare forced to complete the motor plan during theexecution of the reach.
The moderate degree of correlation betweenMTs and RTs found in our study may be deter-mined by the modest requirements for behaviouralstrategies of the experimental contexts. The sameconclusions could be applied to other studiesshowing similar results (Bjorklund, 1991;Inomata, 1980). Further work is necessary to seewhether the relationship between RTs and MTsmay become more evident when participants facemore demanding conditions.
Our findings closely resemble those of Songand Nakayama (2007). In their design, an odd-coloured target was presented among two distrac-tors, and participants were required to make anhand-reaching movement toward the targeteither in a gap or in an overlap paradigm. Theyfound that in the gap task the offset of the fixationpoint, 200 ms before target appearance, reducedthe RTs with respect to overlap trials. At thesame time MTs showed an opposing trend,being longer for overlap than for gap trials. Theyinterpreted these results in terms of allocation ofselective attention. According to the authors theoffset of the fixation point facilitates the releaseof selective attention from the central spot, short-ening the RTs. However, this rapid disengage-ment of attention does not reduce the time fortarget selection, which has to be done duringmovement execution, thus increasing the MTs.The analysis of hand trajectories supports this
hypothesis. In fact it was shown that the increaseof MTs was due to initial misdirection of reachingmovements in the gap task. In this task, partici-pants frequently initiated reaching movementstoward distractors, later correcting them to thetarget. Therefore the facilitatory effect on RTs inthe gap task was counterbalanced by the initialmisdirection of movements, which caused anincrement of MTs. This indicates that a quickstart of the movement may not allow enoughtime for the target selection, perfectly inline with the view that movement plan can becompleted after movement onset.
Neural bases of contextual influences on reachingmovementsBeing able to choose the most appropriateresponse according to the current environmentalconstrains is a key aspect of our goal-orientedbehaviour. This ability relies on the frontalcortex (FC; Bunge et al., 2005). To select andplan contextually appropriate responses, the FCis in turn dependent on the activity of other corti-cal and subcortical structures to which it is con-nected (Dum & Strick, 2005). From this largenetwork the FC gathers and integrates infor-mation regarding sensory stimuli, rewards,emotions and memories (for a review see Miller &Cohen, 2001). Different subregions of the FCcontribute to flexible behaviour in very differentways (Bunge et al., 2005; Tanji & Hoshi, 2001).Some of these regions had been shown to exert acontextual executive control over other FC areasrelated to movement generation. For instance,Stuphorn and Schall (2006) found that the micro-stimulation of the supplementary eye fields (SEF)of behaving monkeys influences saccade gener-ation in a context-dependent manner. In theexperiment, monkeys were required to perform asaccadic version of the countermanding task.From time to time, subthreshold microstimula-tions were delivered in no-stop trials. The effectof the stimulation in the countermanding contextwas to delay saccade generation. This is adaptivebecause slower saccades have a higher probabilitythan faster saccades of being cancelled if a stopsignal is presented. In contrast, analogous
COGNITIVE NEUROPSYCHOLOGY, 2008, 25 (7–8) 1007
CONTEXT INFLUENCES ON REACHING MOVEMENTS

electrical stimulations of saccades in the context ofa visually guided saccade task (that is, in blocks ofno-stop trials) reduced the RTs. Again this is anadaptive effect because it allowed the monkeys toquickly obtain the juice reward. Therefore theactivity of SEF seems to allow the production ofan adaptive response upon the needs of a givencontext.
Two recent pieces of evidence lead us to candi-date the supplementary motor area (SMA) as theregion exerting the contextual executive controlon reaching movements. First of all, Sumneret al. (2007), studying two rare patients withlesions limited to the SEF and to SEF plus theSMA, demonstrated that these regions mediateautomatic effector-specific suppression ofunwanted motor plans—namely, movements thatare automatically and inadvertently primed byenvironmental cues. The patient with SEF lesionwas specifically impaired in eye movements,while the other was impaired for both eye andmanual movements. Secondly, a functional mag-netic resonance imaging (fMRI) study on taskswitching showed that SMA activity is linked tothe suppression of previously relevant responses(Crone, Wendelken, Donohue, & Bunge, 2006).Thus the SMA might provide top-down controlsignals to achieve adaptive behaviour for manualmovements. Another cortical region that plays animportant role in the elaboration of contextualinformation, even though at a more abstractlevel, is the anterior cingulate cortex (ACC). Infact, the activity of this area is related to responseerrors monitoring (Ito, Stuphorn, Brown, &Shall, 2003), to highlight cognitive conflicts(Ridderinkhof, Ullsperger, Crone, &Niewenhuis, 2004) and even to predict error like-lihood in a given context (Brown & Braver, 2005).The ACC is extensively and reciprocally connectedwith both the SEF and the SMA (Dum & Strick,2005; Huerta & Kaas, 1990; Luppino, Rozzi,Calzavara, & Matelli, 2003). Probably the infor-mation elaborated by ACC neurons are notspecific to any effector, and they are later deliveredto SEF, SMA, or both according to both theenvironmental requirements and the effector tobe used.
Conclusions
The results of the present experiment revealed thatboth the RTs and the MTs associated with reach-ing can be affected by the cognitive context.Apparently, experimental constraints can induceparticipants to adopt different strategies for plan-ning and executing identical movements. In ourspeeded go-only task, participants opted for fastprocessing before movement initiation at the costof longer movement times. Presumably, this strat-egy involves a degree of additional processingduring the online control phase of the action,based either on feedback or on feedforwardinternal models. In our countermanding task,instead, the presence of stop signal trials forcedparticipants to perform more processing beforeinitiating movement. As a consequence, move-ments could then be performed in a more ballisticfashion, with less online control and faster times.
First published online 12 May 2008
REFERENCES
Adam, J. J., Nieuwenstein, J., Huys, R., Paas, F.,Kingma, H., Willems, P., et al. (2000). Control ofrapid aimed hand movements: The one-targetadvantage. Journal of Experimental Psychology:
Human Perception and Performance, 26, 295–231.Band, G. P., van der Molen, M. W., & Logan, G. D.
(2003). Horse-race model simulations of the stop-signal procedure. Acta Psychologica (Amst), 112,105–142.
Bjorklund, R. A. (1991). Reaction time and movementtime measured in a key-press and a key-release con-dition. Perceptual and Motor Skills, 72, 663–673.
Brown, J. W., & Braver, T. S. (2005). Learned predic-tion of error likelihood in the anterior cingulatedcortex. Science, 307, 1118–1121.
Bunge, S. A., Wallis, J. D., Parker, A., Brass, M.,Crone, E. A., Hoshi, E., et al. (2005) Neural circui-try underlying rule use in humans and nonhumanprimates. Journal of Neuroscience, 25, 10347–10350.
Chamberlin, C. J., & Magill, R. A. (1989). Preparationand control of rapid, multisegmented responses insimple and choice environments. Research Quarterly
for Exercise and Sport, 60, 256–267.
1008 COGNITIVE NEUROPSYCHOLOGY, 2008, 25 (7–8)
MIRABELLA, PANI, FERRAINA

Crone, E. A., Wendelken, C., Donohue, S. E., &Bunge, S. A. (2006). Neural evidence for dissociablecomponents of task-switching. Cerebral Cortex, 16,475–486.
Dum, R. P., & Strick, P. L. (2005). Motor areas in thefrontal lobe: The anatomical substrate for the centralcontrol of movement. In A. Riehle & E. Vaadia(Eds.), Motor cortex in voluntary movements: A dis-
tributed system for distributed functions (pp. 213–240). Boca Raton, FL: CRC Press.
Emeric, E. E., Brown, J. W., Boucher, L., Carpenter,R. H., Hanes, D. P., Harris, R., et al. (2007).Influence of history on saccade countermanding per-formance in humans and macaque monkeys. Vision
Research, 47, 35–49.Fischman, M. G., & Reeve, T. G. (1992). Slower move-
ment times may not necessarily imply on-line pro-gramming. Journal of Human Movement Studies, 22,131–144.
Fitts, P. M., & Peterson, J. R. (1964). Informationcapacity of discrete motor responses. Journal of
Experimental Psychology, 67, 103–112.Glencross, J. D. (1980). Response planning and the
organization of speed movements. In R.S. Nickerson (Eds.), Attention and performance VIII
(pp. 107–125). Hillsdale, NJ: Lawrence ErlbaumAssociates.
Henry, F. M. (1961). Reaction time–movement timecorrelations. Perceptual and Motor Skills, 12, 63–66.
Henry, I.M.,&Rogers,D. E. (1960). Increased responselatency for complicated movements and a “memorydrum” theory of neuromotor control. Research
Quarterly for Exercise and Sport, 31, 448–458.Huerta, M. F., & Kaas, J. H. (1990). Supplementary eye
field as defined by intracortical microstimulation:Connections in macaques. Journal of Comparative
Neurology, 293, 299–330.Inomata, K. (1980). Influence of different preparatory
sets on reaction time and arm- movement time.Perceptual and Motor Skills, 50, 139–144.
Ito, S., Stuphorn, V., Brown, J. W., & Shall, J. (2003).Performance monitoring by the anterior cingulatedcortex during saccade countermanding. Science, 302,120–122.
Khan, M. A., Lawrence, G. P., Buckolz, E., &Franks, I. M. (2006). Programming strategies forrapid aiming movements under simple and choicereaction time conditions. Quarterly Journal of
Experimental Psychology, 59, 524–542.Klapp, S. T. (1995). Motor response programming
during simple and choice reaction time: The role of
practice. Journal of Experimental Psychology: Human
Perception and Performance, 21, 1015–1027.Klapp, S. T. (1996). Reaction time analysis of central
motor control. In H. N. Zelaznik (Eds.), Advances
in motor learning and control (pp. 13–35).Champaign, IL: Human Kinetics.
Lappin, J. S., & Eriksen, C. W. (1966). Use of a delayedsignal to stop a visual reaction time response. Journal
of Experimental Psychology, 72, 805–811.Lepine, D., Glencross, D., & Requin, J. (1989). Some
experimental evidence for and against a parametricconception of movement programming. Journal of
Experimental Psychology: Human Perception and
Performance, 15, 347–358.Logan, G. D. (1981). Attention, automaticity and the
ability to stop a speeded choice response. InJ. Long & A. D. Baddley (Eds.), Attention and per-
formance IX (pp. 205–222). Hillsdale, NJ:Lawrence Erlbaum Associates.
Logan, G. D. (1994). On the ability to inhibitthought and action: A users’ guide to the stopsignal paradigm. In D. Dagenbach & T. H. Carr(Eds.), Inhibitory processes in attention, memory and
language (pp. 189–239). San Diego, CA: AcademicPress.
Logan, G. D., & Cowan, W. B. (1984). On the abilityto inhibit thought and action: A theory of an act ofcontrol. Psychological Review, 91, 295–327.
Luppino, G., Rozzi, S., Calzavara, R., & Matelli, M.(2003). Prefrontal and agranular cingulate projec-tions to the dorsal premotor areas F2 and F7 in themacaque monkey. European Journal of Neuroscience,17, 559–578.
Marzi, C. A., Bisiacchi, P., & Nicoletti, R. (1991). Isinterhemispheric transfer of visuomotor informationasymmetric? Evidence from a meta-analysis.Neuropsychologia, 29, 1163–1177.
Miller, E. K., & Cohen, J. D. (2001). An integrativetheory of prefrontal cortex function. Annual Review
of Neuroscience, 24, 167–202.Mirabella, G., Pani, P., Pare, M., & Ferraina, S.
(2006). Inhibitory control of reaching movementsin humans. Experimental Brain Research, 174,240–255.
Osman, A., Kornblum, S., & Meyer, D. E. (1986). Thepoint of no return in choice reaction time:Controlled and ballistic stages of response prep-aration. Journal of Experimental Psychology: Human
Perception and Performance, 12, 243–258.Osman, A., Kornblum, S., &Meyer, D. E. (1990). Does
motor programming necessitate response execution?
COGNITIVE NEUROPSYCHOLOGY, 2008, 25 (7–8) 1009
CONTEXT INFLUENCES ON REACHING MOVEMENTS

Journal of Experimental Psychology: Human Perception
and Performance, 16, 83–98.Ridderinkhof, K. R., Ullsperger, M., Crone, A., &
Nieuwenhuis, S. (2004). Role of the medial frontalcortex in cognition. Science, 306, 443–447.
Rieger, M., &Gauggel, S. (2002). Inhibition of ongoingresponses in patients with traumatic brain injury.Neuropsychologia, 40, 76–85.
Riehle, A. (2005). Preparation for action: One ofthe key functions of the motor cortex. In A. Riehle& E. Vaadia (Eds.), Motor cortex in voluntary move-
ments: A distributed system for distributed functions
(pp. 213–240). Boca Raton, FL: CRC Press.Riehle, A., & Requin, J. (1989). Monkey primary motor
and premotor cortex: Single-cell activity related toprior information about direction and extent of anintended movement. Journal of Neurophysiology, 61,534–549.
Riehle, A., & Requin, J. (1995). Neuronal correlates ofthe specification of movement direction and force infour cortical areas of the monkey. Behavior Brain
Research, 70, 1–13.Rosenbaum, D. A. (1980). Humanmovement initiation:
Specification of arm, direction, and extent. Journal of
Experimental Psychology: General, 109, 444–474.Rosenbaum,D.A.,Hindorff,V.,&Munro, E.M. (1987).
Scheduling and programming of rapid fingersequences: Tests and elaborations of the hierarchicaleditor model. Journal of Experimental Psychology:
Human Perception Performance, 13, 193–203.
Sanders, A. F. (1983). Towards a model of stress andhuman performance. Acta Psychologica, 53, 61–97.
Song, J. H., & Nakayama, K. (2007). Fixation offsetfacilitates saccades and manual reaching for singlebut not multiple target displays. Experimental Brain
Research, 177, 223–232.Sternberg, S., Monsell, S., Knoll, R. L., &
Wright, C. E. (1978). The latency and duration ofrapid movement sequence: Comparison of speechand typewriting. In G. E. Stelmach (Eds.),Information processing in motor control and learning
(pp. 117–152). New York: Academic Press.Sternberg, S., Wright, C. E., Knoll, R. L., & Monsell, S.
(1980). Motor program in rapid speech: Additionalevidence. In R. A. Cole (Eds.), Perception and pro-
duction of fluent speech. Hillsdale, NJ: LawrenceErlbaum Associates.
Stuphorn, V., & Schall, J. D. (2006). Executive controlof countermanding saccades by the supplementaryeye field. Nature Neuroscience, 9, 925–931.
Sumner, P., Nachev, P., Morris, P., Peters, A. M.,Jackson, S. R., Kennard, C., et al. (2007). Humanmedial frontal cortex mediates unconscious inhi-bition of voluntary action. Neuron, 54, 697–711.
Tanji, J., &Hoshi, E. (2001). Behavioral planning in theprefrontal cortex. Current Opinion in Neurobiology,11, 164–170.
Vindras, P., & Viviani, P. (2005). Planning short point-ing sequences. Experimental Brain Research, 160,141–153.
1010 COGNITIVE NEUROPSYCHOLOGY, 2008, 25 (7–8)
MIRABELLA, PANI, FERRAINA