Companion robots for elderly people: Using theatre to investigate potential users' views
6
Abstract — A theatre production of a play illustrating the functionality, social and ethical aspects of robots helping with aspects of elderly care was presented at a residential care home. The audience consisted of mainly elderly residents and carers. The residents suffered from various physical and mental disabilities which impaired their ability to provide responses through standard questionnaires. Therefore, additional structured interviews were used to gain insight into their views on the theatre scenario. Both carers and residents were generally positive towards the idea of using robots to help with care. Residents in particular stressed the desire for care robots to also provide social interaction and entertainment. I. INTRODUCTION In developed countries birthrates have fallen and along with improvements in healthcare, people are living longer. This is changing the demographic make-up of these countries, and it is very likely that in the near future, a relatively large proportion of the population will consist of elderly people. These trends are also becoming apparent even in less developed countries as global living standards rise. Therefore, it is likely that in the future there will be a large numbers of elderly people who will eventually require increasing amounts of care, and falling numbers of younger workers available (or willing!) to provide this care. One possible way to address the problem is to use robotic and automation technology to take over at least some aspects of the care of elderly people (e.g. [1]). Current robot technology has limited capabilities and current robots cannot provide the same level of care as a human carer, so it will be unlikely that robots will replace humans completely in this role in the foreseeable future. Technically there are still many challenges to be overcome, but some task areas have been identified where robots might usefully be employed using current robotic technology. Broekens et al. [2] in their 2009 review of assistive robots for elder-care found that currently, robots are being developed and tested for potential assistive elder care applications mainly in the areas of service, rehabilitation and social uses (e.g. [3]). It is to be expected that elderly people themselves might show resistance to having robot care imposed on them. However, if a robot can provide some simple assistance that might make the difference between an elderly person being able to stay in their own homes rather than having to go into care, the choice of having an assistive robot in their home may be attractive. In order to assess potential users views, it is usual to conduct questionnaire-based surveys (e.g. Scopelliti et al. [4] & Dautenhahn et al. [5]). Surveys of This research is supported by the interdisciplinary European FP7 Integrated projects LIREC (LIving with Robots and intEractive Companions, Grant Agreement 215554) and ACCOMPANY (Acceptable robotiCs COMPanions for AgeiNg Years, Grant Agreement 287624). All authors are with the Adaptive Systems Research Group at the University of Hertfordshire apart from Anne Campbell who is with the School of Health Care at the University of Hertfordshire (emails: {M.L.Walters, K.L.Koay, D.S.Syrdal, A.Campbell, K.Dautenhahn}@herts.ac.uk). potential elderly users of robotic have often indicated that elderly people themselves are often ambiguous towards the use of robots for care applications [6]. However, this is not surprising as most people have little or no direct experience of robotic technology. It is therefore difficult for potential (elderly) users even to visualise or gain any sort of realistic impression of how robots may actually provide care for elderly people. Live Human-Robot Interaction (HRI) user studies provide an immersive experience of interacting with a robot, but those involving medium or human-scaled mobile robots, are usually time consuming and typically involve significant resources [7][8][9]. Because of practical limitations, participant numbers are typically relatively low, normally less than 20 and very few studies involve more than 50 users. To perform HRI studies with larger numbers of participants, Video-based HRI (VHRI) methods have been used as a useful means to obtain early user feedback [10][11][12]. However, video-based experiments, although providing a useful impression of how robots may interact and function with users, cannot replace live experiments [13]. In order to combine a live HRI experience within a more efficient experimental group setting, inspiration has been taken from the field of Human-Computer Interaction (HCI) where theatre has been used to gain feedback from potential user audiences [14]. The Theatre-based HRI (THRI) methodology is based on similar uses of theatre in HCI user studies, pioneered by Alan Newell [15]. Forum style group discussions are commonly held after a theatre presentation, with the actors in attendance to help facilitate open and free communication of thoughts and opinions. Robots have been used successfully in theatre presentations [16][17][18][19], and previously we have shown that similar theatre-based experimental methods applied to HRI have proved effective in gauging audiences' opinions regarding robots early in the design development process [20][21]. Findings can also guide the development of future live HRI trials for more comprehensive users studies. Using an actor in the role of a robot owner throughout the trial and subsequent discussions can also overcome possible influences on participants due to having the robots’ creators present. A. Theatre-based Human-Robot Interaction Full-Scale User Studies Previously, three THRI studies have been performed: The first was a pilot study [20] and the following two were full scale studies carried out at two schools in November and December 2010 [21]. These THRI presentations were designed taking account of the projected technological development of companion robots as well as for facilitating engagement with an audience of school students. At the end of the play the audiences were involved in discussions regarding issues such as acceptability of the scenario and the intra-household disclosure of information by the robot. Findings suggest that this methodology was effective in eliciting discussion with the audience and that problems Companion Robots for Elderly People: Using Theatre to Investigate Potential Users' Views Michael L. Walters, Kheng Lee Koay, Dag Sverre. Syrdal, Anne Campbell and Kerstin Dautenhahn, Member, IEEE
Transcript of Companion robots for elderly people: Using theatre to investigate potential users' views
Abstract — A theatre production of a play illustrating the functionality, social and ethical aspects of robots helping with aspects of elderly care was presented at a residential care home. The audience consisted of mainly elderly residents and carers. The residents suffered from various physical and mental disabilities which impaired their ability to provide responses through standard questionnaires. Therefore, additional structured interviews were used to gain insight into their views on the theatre scenario. Both carers and residents were generally positive towards the idea of using robots to help with care. Residents in particular stressed the desire for care robots to also provide social interaction and entertainment.
I. INTRODUCTION
In developed countries birthrates have fallen and along with improvements in healthcare, people are living longer. This is changing the demographic make-up of these countries, and it is very likely that in the near future, a relatively large proportion of the population will consist of elderly people. These trends are also becoming apparent even in less developed countries as global living standards rise. Therefore, it is likely that in the future there will be a large numbers of elderly people who will eventually require increasing amounts of care, and falling numbers of younger workers available (or willing!) to provide this care. One possible way to address the problem is to use robotic and automation technology to take over at least some aspects of the care of elderly people (e.g. [1]). Current robot technology has limited capabilities and current robots cannot provide the same level of care as a human carer, so it will be unlikely that robots will replace humans completely in this role in the foreseeable future. Technically there are still many challenges to be overcome, but some task areas have been identified where robots might usefully be employed using current robotic technology. Broekens et al. [2] in their 2009 review of assistive robots for elder-care found that currently, robots are being developed and tested for potential assistive elder care applications mainly in the areas of service, rehabilitation and social uses (e.g. [3]).
It is to be expected that elderly people themselves might show resistance to having robot care imposed on them. However, if a robot can provide some simple assistance that might make the difference between an elderly person being able to stay in their own homes rather than having to go into care, the choice of having an assistive robot in their home may be attractive. In order to assess potential users views, it is usual to conduct questionnaire-based surveys (e.g. Scopelliti et al. [4] & Dautenhahn et al. [5]). Surveys of
This research is supported by the interdisciplinary European FP7 Integrated projects LIREC (LIving with Robots and intEractive Companions, Grant Agreement 215554) and ACCOMPANY (Acceptable robotiCs COMPanions for AgeiNg Years, Grant Agreement 287624).
All authors are with the Adaptive Systems Research Group at the University of Hertfordshire apart from Anne Campbell who is with the School of Health Care at the University of Hertfordshire (emails: {M.L.Walters, K.L.Koay, D.S.Syrdal, A.Campbell, K.Dautenhahn}@herts.ac.uk).
potential elderly users of robotic have often indicated that elderly people themselves are often ambiguous towards the use of robots for care applications [6]. However, this is not surprising as most people have little or no direct experience of robotic technology. It is therefore difficult for potential (elderly) users even to visualise or gain any sort of realistic impression of how robots may actually provide care for elderly people.
Live Human-Robot Interaction (HRI) user studies provide an immersive experience of interacting with a robot, but those involving medium or human-scaled mobile robots, are usually time consuming and typically involve significant resources [7][8][9]. Because of practical limitations, participant numbers are typically relatively low, normally less than 20 and very few studies involve more than 50 users. To perform HRI studies with larger numbers of participants, Video-based HRI (VHRI) methods have been used as a useful means to obtain early user feedback [10][11][12]. However, video-based experiments, although providing a useful impression of how robots may interact and function with users, cannot replace live experiments [13]. In order to combine a live HRI experience within a more efficient experimental group setting, inspiration has been taken from the field of Human-Computer Interaction (HCI) where theatre has been used to gain feedback from potential user audiences [14]. The Theatre-based HRI (THRI) methodology is based on similar uses of theatre in HCI user studies, pioneered by Alan Newell [15]. Forum style group discussions are commonly held after a theatre presentation, with the actors in attendance to help facilitate open and free communication of thoughts and opinions. Robots have been used successfully in theatre presentations [16][17][18][19], and previously we have shown that similar theatre-based experimental methods applied to HRI have proved effective in gauging audiences' opinions regarding robots early in the design development process [20][21]. Findings can also guide the development of future live HRI trials for more comprehensive users studies. Using an actor in the role of a robot owner throughout the trial and subsequent discussions can also overcome possible influences on participants due to having the robots’ creators present.
A. Theatre-based Human-Robot Interaction Full-Scale User Studies
Previously, three THRI studies have been performed: The first was a pilot study [20] and the following two were full scale studies carried out at two schools in November and December 2010 [21]. These THRI presentations were designed taking account of the projected technological development of companion robots as well as for facilitating engagement with an audience of school students. At the end of the play the audiences were involved in discussions regarding issues such as acceptability of the scenario and the intra-household disclosure of information by the robot. Findings suggest that this methodology was effective in eliciting discussion with the audience and that problems
Companion Robots for Elderly People: Using Theatre to Investigate Potential Users' Views
Michael L. Walters, Kheng Lee Koay, Dag Sverre. Syrdal, Anne Campbell and Kerstin Dautenhahn, Member, IEEE

related to intra-household disclosure of information were best resolved by clear-cut solutions tied to ownership and clear principles. The current paper presents the latest version of the THRI study, with the main difference from previous THRI studies being that the target audience was drawn from both residents and carers from a local elderly care home.
II. DEVELOPMENT OF THE THRI STUDY
The differences between the use of theatre in HCI studies and our use for HRI studies are primarily due to the artefacts involved (i.e. the robots, the subject of the experimental investigation) actually being used as actors [22]. In HCI studies, the scripts for the theatre enactment take account of the display limitations of a computer system. This is similar to actors in a typical theatre production working alongside any prop or particular stage device such as lighting and scenery. The scripts for the THRI studies need to be detailed enough so that the actor is able to work within the limitations of the robots. The theatre audience should become absorbed by the demonstration and be comfortably guided through post-enactment discussions by a neutral actor as the main go between for the audience and the design team [14]. In HCI, method actors can also improvise to the situation as required [12], though this is not something that can easily be achieved with pre-scripted robots.
The methods for using theatre in both HCI and HRI work well on two levels; one is the discussion aspect through the actor, the other is through the revision of scenarios and the working through of ideas actually during the discussion. In THRI it is not presently technically possible to have instant revisions, but it is possible for the actor to hold a thought-process demonstration with the audience. Therefore, the THRI methodology provides freedom of creation to scenario and robot designers, but simultaneously facilitates early feedback from target user groups.
A. Scenario Development
Scenarios are stories created about the users and their interactions with artefacts in a specific context (see, for example, Carroll [23][24]). Scenario based methods were initially conceived as an aid for designers of such technologies, as they allow for the exploration and focus of issues which otherwise may not have been available to the designers [24]. They also allow the researcher a greater ability to convey some of the salient issues to the prospective user in a way which pure descriptions of the technology may not. As Carroll [24] points out, this becomes a way “to anchor design discussion” with other stakeholders in the design process.
Scenarios can be instantiated in a variety of forms: written stories - with or without suggestive illustrations, animations, video or dramatizations. In HRI, the use of video-based instantiations of scenarios have been used extensively in user-studies. Some of these studies have focused on studies of particular issues like responses to specific robot appearances [25], spatial behaviour [26], as well as interaction styles [27][28][29]. It has also been used for more general explorations of user requirements and reasoning about the use of a robot within domestic settings (cf. Koay et al. [30][31]). In these examples, researchers had the opportunity to elicit feedback on specific proposed technologies as well as being able to explore more general issues raised by these technologies before committing to specific modalities for more resource intensive long-term studies.
1) CharactersFor the play, two actors were hired, one played the
grandfather “David” - an elderly man who has recently bought the Robotic Home Companion and has learned how to use it, while the other actor plays David’s grandson, who is coming to visit David and has not seen the Robotic Home Companion before. The inclusion of both elderly (David) and a younger character (his Grandson) allows both younger and older audience members to have a greater chance for mutual identification with the characters in the play. The narrative of the play demonstrated the Robotic Home Companion’s functionality in providing physical assistance and cognitive prosthesis. Peoples views of the concept of agent migration was a novel aspect investigated by this study. The user (David) did not have to deal with multiple robot interfaces, but could deal with essentially the same robot “personality” (i.e. interface, user preferences and shared history etc.) on several robotic platforms (embodiments). Migration was therefore presented as necessary to accomplish different tasks. The Robot Home Companion was semi-remotely controlled with various pre-scripted sequences and mainly resided in the Sunflower embodiment, apart from two short scenes where it migrated to the AIBO embodiment to establish a socially mediated game between two remote users [32].
Sunflower Embodiment: The Sunflower robot used in this study was designed and built at the University of Hertfordshire as a research platform for the study of Robotic Home Companions. Consisting of a Pioneer P3-DX mobile base [33] it has a minimally expressive head with a static face, diffuse colour LED display panels and a slide out carrying tray with an integrated touch screen user interface to facilitate user interaction. The robot can navigate freely, express internal states (i.e. happy, sad, alert) and also attract users' attention using body and head motions, sound tunes and the colour LED display panels (see Figure 1).
The Aibo Embodiment: Also used in the play was the commercially available AIBO ERS7 developed by Sony [34]. It has a pet-like appearance and behaviour. In the play, the user interacted with the AIBO by moving a pink ball in front of its visual field, and the user could also interact with the AIBO by touching its paws or stroking its body or head (similar to how a person might interact with a pet).
2) Rehearsal Prior to the play, the actors and the robot controller spent
more than 6 hours over 3 different days to rehearse the play. During the introduction session, the actors were informed about the aims of the play, the purpose of the robot in the play, and the functionalities of the robot. They were shown how the Robotic Home Companion provided assistance for the owner and his grandson in various scenes and how to interact with the robot in the various scenes of the play. The actors were also shown the robot behaviours that would be used by the Robotic Home Companion during the play to attract users' attention, or to provide feedback with the robot's expressions (“happy”, “alert”, and sad). This was to familiarise the actors with the robot behaviours they encountered during the play. The actors then rehearsed the whole play together, with the robot home companion being controlled by the researcher, focusing on the script and the interaction timings between the users and the robotic companion’s actions.
3) The Theatre Scenario’s Narrative The theatre scenario for this study focused on the use of a
Robotic Home Companion in a household environment to support the owner with cognitive prosthesis (i.e. providing

reminders or notifications) and physical assistance (i.e. fetch and carry). Depending on the task, the Robotic Home Companion can migrate its personality and memory to a suitable robotic embodiment in order to complete the task [35]. The concept for migrating the Robotic Home Companion's personality and memory between different robotic embodiments was to provide a consistent user interface to the user. The THRI scenario aims to investigate from the stakeholders perspectives how these technological functionalities may impact them regarding both technological (i.e. usage and interaction) and psychological (i.e. moral and ethical) aspects of the robotic home companion assisting and supporting them at their home.
The main story line was designed to engage the audiences, and the plot focussed on the elderly user, David, who had some slight physical and mental impairments, and owned a Robotic Home Companion to provide simple forms of assistance which allowed him to live independently. David's grandson comes to stay, and the story follows the grandson's introduction and increasing familiarity with David's Robotic Companion. There is some slight friction from David over his grandson's increasing competence and use of the Companion. The grandson uses the Companion to secretly arrange a surprise birthday party for David. The play ends with David about to interrogate the Companion to find out what his grandson has been doing. At this point the actors stay in character and ask the audience what the Companion should do? Should it tell David about the party, and ruin the surprise, or should it withhold the information?
The play attempted to highlight issues regarding the ownership of a companion, how the companion impacts the particular tasks it is intended to help with, and also its role in the relationship between the members of the household. The play also raised specific key issues related to the companion's ability to retain information to better assist the users as well as the disclosure of information between household members. This was to elicit responses and discussion from participants through exposing the audience to various use cases of a robotic home companion.
4) ProcedureUnlike the previous THRI studies, which were played to
audiences of University students or school children, this final THRI study was played to an audience of
predominantly elderly people who were residents in a local care home. The play was performed in the communal dining area of the care-home, which was a familiar area to all 50 or so members of the audience. The area was cleared of dining tables, and seats were laid out in rows, with spaces made for those audience members in wheelchairs. The play was presented at one end of the area, with the audience on the same level as the actors. After the play, short questionnaires were distributed to the audience. The carers present assisted some residents to fill in the questionnaires, but the post presentation discussion was very limited because of the various disabilities of the residents.
III. RESULTS
This final study raised several issues regarding the experimental procedure and data collection compared to the previous school-based studies. Most residents of the care home were there either because they were physically or mentally impaired. It was found to be a problem using questionnaires as an instrument for the study as residents tended to either have physical difficulties (e.g. poor eyesight, arthritis in hands/fingers, etc.) or some form of mental impairment (dementia etc.) which made it very difficult for them to answer the questionnaires without a great deal of help. Approximately 14 (including 6 members of care staff present) were able to answer some or all of the questions. The final sample consisted of 6 (2 male, 4 female, Age range 18-55. Median age 27) carers working in the care home and 8 residents (7 female, 1 male). This represented a minority of the total watching audience, many of whom were unable to respond to the questionnaire due to physical and/or cognitive impairments. In addition, most of the respondents only answered the closed questions, and did not respond to the open-ended questions (including age). Of the 8 residents, only 3 gave their age, which ranged from 66 to 86, with a median age of 79. The residents of the care home were all in need of residential care, and as such represented a heterogeneous sample in terms of medical conditions. In the light of both physical and mental difficulties experienced by the elderly residents in completing the questionnaires, it was decided to return to the care home and perform one to one interviews to allow a selection of the the residents to provide more comprehensive answers with no time constraints. The next sub-section provides a quantitative analyses of the questionnaire data (III. A), and the following sub-section (III. B) a quantitative analyses of the interview findings.
A. Questionnaires and Analyses
The questionnaire given to participants contained questions as to their preferred outcome to the story: Whether or not the robot should tell the grandfather what the robot had been using it for, as well as their ratings of different reasons for the robot to divulge or not divulge this information, based on the categories from the previous THRI study [21]. These categories were:
The Grandson has a right to privacyIt would ruin the surprise for the grandfather if he knew about the partyThe grandsons was doing something nice for the grandfatherThe robot belongs to the grandfather it should be loyal to himThe grandson shouldn't lie to his grandfatherThe robot is not clever enough to decide on his own
The participants were invited to respond to the categories using 5-point Likert scales indicating agreement. Due to the small number of participants, the analysis below is primarily descriptive in nature.
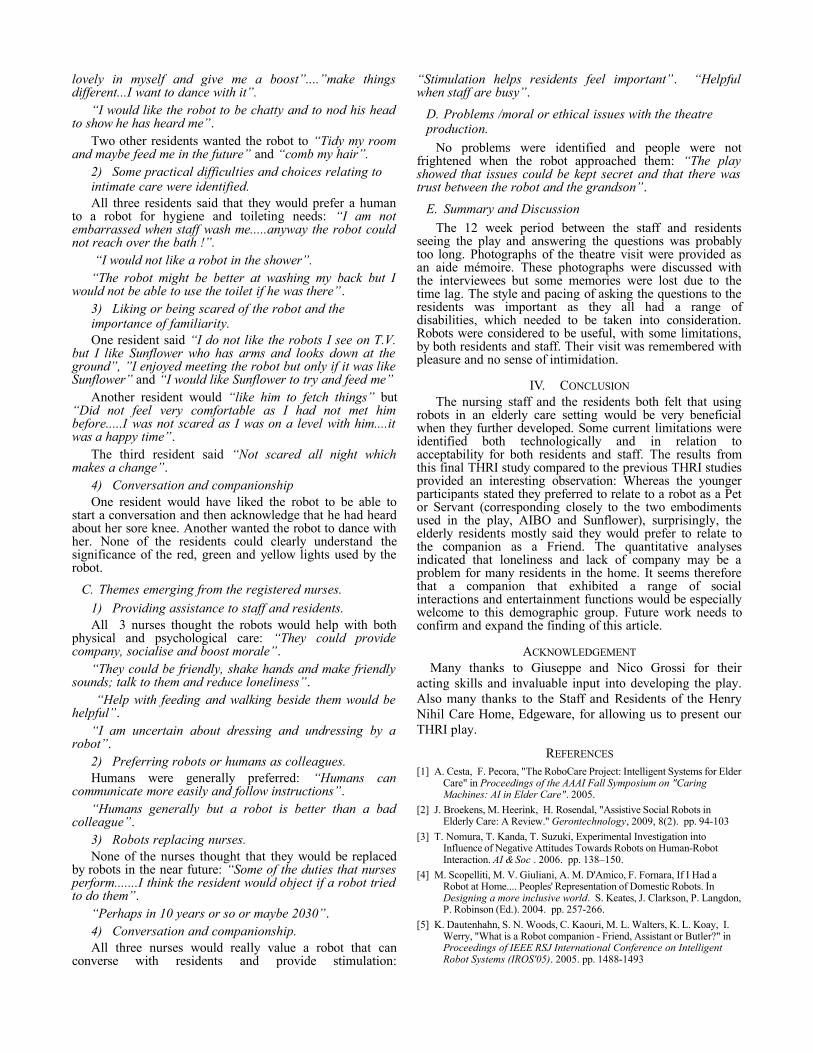
1) Agreement with Information disclosureSee Table 1 for agreement with whether or not the robot should disclose the grandson's actions to the grandfather. It
Figure 1: The THRI Study. The play with robots and professional actors was presented to an audience of elderly care home residents and carers
indicates that the majority of both samples were in favour of disclosing the information to the grandfather, but that there was a minority in the resident group that were against this.
TABLE 1: AGREEMENT WITH INFORMATION DISCLOSURE BY SAMPLE
Sample Response
Pro-Disclosure Anti-Disclosure
Number % Number % Total
Carer 5 83.3 1 16.7 6
Resident 5 62.5 3 37.5 8
Total 10 4 14
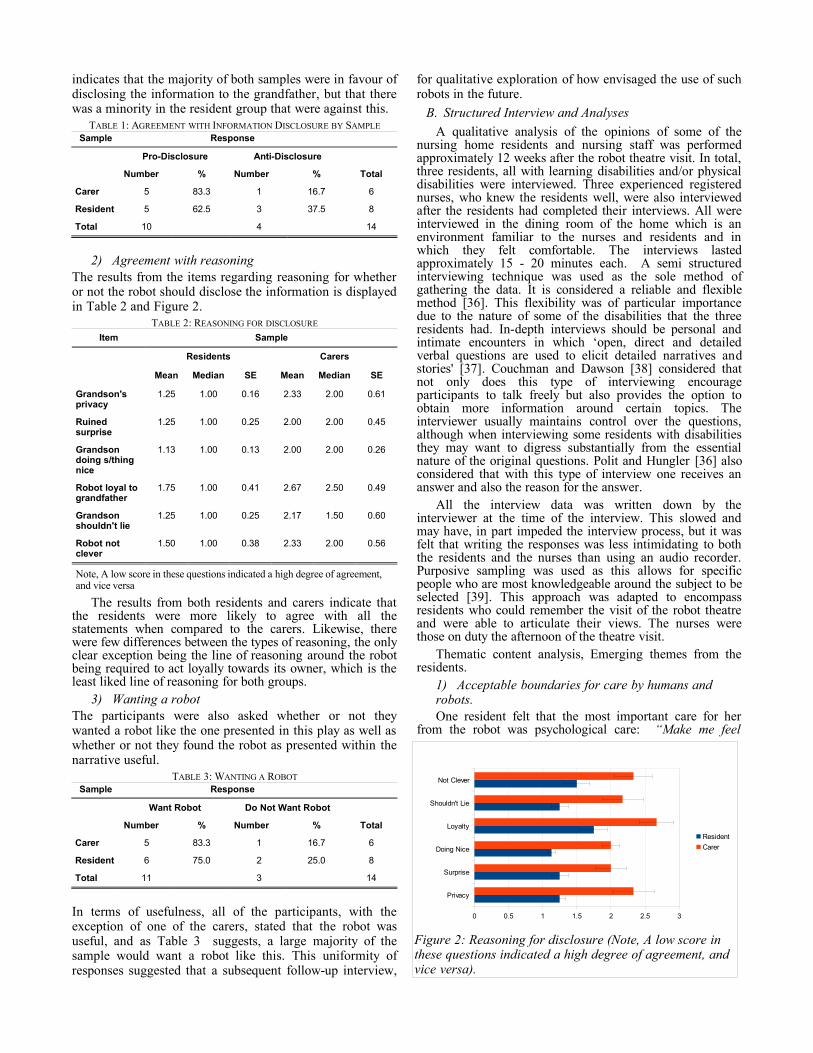
2) Agreement with reasoningThe results from the items regarding reasoning for whether or not the robot should disclose the information is displayed in Table 2 and Figure 2.
TABLE 2: REASONING FOR DISCLOSURE
Item Sample
Residents Carers
Mean Median SE Mean Median SE
Grandson's privacy
1.25 1.00 0.16 2.33 2.00 0.61
Ruined surprise
1.25 1.00 0.25 2.00 2.00 0.45
Grandson doing s/thing nice
1.13 1.00 0.13 2.00 2.00 0.26
Robot loyal to grandfather
1.75 1.00 0.41 2.67 2.50 0.49
Grandson shouldn't lie
1.25 1.00 0.25 2.17 1.50 0.60
Robot not clever
1.50 1.00 0.38 2.33 2.00 0.56
Note, A low score in these questions indicated a high degree of agreement, and vice versa
The results from both residents and carers indicate that the residents were more likely to agree with all the statements when compared to the carers. Likewise, there were few differences between the types of reasoning, the only clear exception being the line of reasoning around the robot being required to act loyally towards its owner, which is the least liked line of reasoning for both groups.
3) Wanting a robotThe participants were also asked whether or not they wanted a robot like the one presented in this play as well as whether or not they found the robot as presented within the narrative useful.
TABLE 3: WANTING A ROBOT
Sample Response
Want Robot Do Not Want Robot
Number % Number % Total
Carer 5 83.3 1 16.7 6
Resident 6 75.0 2 25.0 8
Total 11 3 14
In terms of usefulness, all of the participants, with the exception of one of the carers, stated that the robot was useful, and as Table 3 suggests, a large majority of the sample would want a robot like this. This uniformity of responses suggested that a subsequent follow-up interview,
for qualitative exploration of how envisaged the use of such robots in the future.
B. Structured Interview and Analyses
A qualitative analysis of the opinions of some of the nursing home residents and nursing staff was performed approximately 12 weeks after the robot theatre visit. In total, three residents, all with learning disabilities and/or physical disabilities were interviewed. Three experienced registered nurses, who knew the residents well, were also interviewed after the residents had completed their interviews. All were interviewed in the dining room of the home which is an environment familiar to the nurses and residents and in which they felt comfortable. The interviews lasted approximately 15 - 20 minutes each. A semi structured interviewing technique was used as the sole method of gathering the data. It is considered a reliable and flexible method [36]. This flexibility was of particular importance due to the nature of some of the disabilities that the three residents had. In-depth interviews should be personal and intimate encounters in which ‘open, direct and detailed verbal questions are used to elicit detailed narratives and stories' [37]. Couchman and Dawson [38] considered that not only does this type of interviewing encourage participants to talk freely but also provides the option to obtain more information around certain topics. The interviewer usually maintains control over the questions, although when interviewing some residents with disabilities they may want to digress substantially from the essential nature of the original questions. Polit and Hungler [36] also considered that with this type of interview one receives an answer and also the reason for the answer.
All the interview data was written down by the interviewer at the time of the interview. This slowed and may have, in part impeded the interview process, but it was felt that writing the responses was less intimidating to both the residents and the nurses than using an audio recorder. Purposive sampling was used as this allows for specific people who are most knowledgeable around the subject to be selected [39]. This approach was adapted to encompass residents who could remember the visit of the robot theatre and were able to articulate their views. The nurses were those on duty the afternoon of the theatre visit.
Thematic content analysis, Emerging themes from the residents.
1) Acceptable boundaries for care by humans and robots.One resident felt that the most important care for her
from the robot was psychological care: “Make me feel
Figure 2: Reasoning for disclosure (Note, A low score in these questions indicated a high degree of agreement, and vice versa).
Privacy
Surprise
Doing Nice
Loyalty
Shouldn't Lie
Not Clever
0 0.5 1 1.5 2 2.5 3
Resident
Carer
lovely in myself and give me a boost”....”make things different...I want to dance with it”.
“I would like the robot to be chatty and to nod his head to show he has heard me”.
Two other residents wanted the robot to “Tidy my room and maybe feed me in the future” and “comb my hair”.
2) Some practical difficulties and choices relating to intimate care were identified.All three residents said that they would prefer a human
to a robot for hygiene and toileting needs: “I am not embarrassed when staff wash me.....anyway the robot could not reach over the bath !”.
“I would not like a robot in the shower”.“The robot might be better at washing my back but I
would not be able to use the toilet if he was there”.3) Liking or being scared of the robot and the importance of familiarity.One resident said “I do not like the robots I see on T.V.
but I like Sunflower who has arms and looks down at the ground”, ”I enjoyed meeting the robot but only if it was like Sunflower” and “I would like Sunflower to try and feed me”
Another resident would “like him to fetch things” but “Did not feel very comfortable as I had not met him before.....I was not scared as I was on a level with him....it was a happy time”.
The third resident said “Not scared all night which makes a change”.
4) Conversation and companionshipOne resident would have liked the robot to be able to
start a conversation and then acknowledge that he had heard about her sore knee. Another wanted the robot to dance with her. None of the residents could clearly understand the significance of the red, green and yellow lights used by the robot.
C. Themes emerging from the registered nurses.
1) Providing assistance to staff and residents.All 3 nurses thought the robots would help with both
physical and psychological care: “They could provide company, socialise and boost morale”.
“They could be friendly, shake hands and make friendly sounds; talk to them and reduce loneliness”.
“Help with feeding and walking beside them would be helpful”.
“I am uncertain about dressing and undressing by a robot”.
2) Preferring robots or humans as colleagues.Humans were generally preferred: “Humans can
communicate more easily and follow instructions”.“Humans generally but a robot is better than a bad
colleague”.3) Robots replacing nurses.None of the nurses thought that they would be replaced
by robots in the near future: “Some of the duties that nurses perform.......I think the resident would object if a robot tried to do them”.
“Perhaps in 10 years or so or maybe 2030”.4) Conversation and companionship.All three nurses would really value a robot that can
converse with residents and provide stimulation:
“Stimulation helps residents feel important”. “Helpful when staff are busy”.
D. Problems /moral or ethical issues with the theatre production.
No problems were identified and people were not frightened when the robot approached them: “The play showed that issues could be kept secret and that there was trust between the robot and the grandson”.
E. Summary and Discussion
The 12 week period between the staff and residents seeing the play and answering the questions was probably too long. Photographs of the theatre visit were provided as an aide mémoire. These photographs were discussed with the interviewees but some memories were lost due to the time lag. The style and pacing of asking the questions to the residents was important as they all had a range of disabilities, which needed to be taken into consideration. Robots were considered to be useful, with some limitations, by both residents and staff. Their visit was remembered with pleasure and no sense of intimidation.
IV. CONCLUSION
The nursing staff and the residents both felt that using robots in an elderly care setting would be very beneficial when they further developed. Some current limitations were identified both technologically and in relation to acceptability for both residents and staff. The results from this final THRI study compared to the previous THRI studies provided an interesting observation: Whereas the younger participants stated they preferred to relate to a robot as a Pet or Servant (corresponding closely to the two embodiments used in the play, AIBO and Sunflower), surprisingly, the elderly residents mostly said they would prefer to relate to the companion as a Friend. The quantitative analyses indicated that loneliness and lack of company may be a problem for many residents in the home. It seems therefore that a companion that exhibited a range of social interactions and entertainment functions would be especially welcome to this demographic group. Future work needs to confirm and expand the finding of this article.
ACKNOWLEDGEMENT
Many thanks to Giuseppe and Nico Grossi for their acting skills and invaluable input into developing the play. Also many thanks to the Staff and Residents of the Henry Nihil Care Home, Edgeware, for allowing us to present our THRI play.
REFERENCES
[1] A. Cesta, F. Pecora, "The RoboCare Project: Intelligent Systems for Elder Care" in Proceedings of the AAAI Fall Symposium on "Caring Machines: AI in Elder Care". 2005.
[2] J. Broekens, M. Heerink, H. Rosendal, "Assistive Social Robots in Elderly Care: A Review." Gerontechnology, 2009, 8(2). pp. 94-103
[3] T. Nomura, T. Kanda, T. Suzuki, Experimental Investigation into Influence of Negative Attitudes Towards Robots on Human-Robot Interaction. AI & Soc . 2006. pp. 138–150.
[4] M. Scopelliti, M. V. Giuliani, A. M. D'Amico, F. Fornara, If I Had a Robot at Home.... Peoples' Representation of Domestic Robots. In Designing a more inclusive world. S. Keates, J. Clarkson, P. Langdon, P. Robinson (Ed.). 2004. pp. 257-266.
[5] K. Dautenhahn, S. N. Woods, C. Kaouri, M. L. Walters, K. L. Koay, I. Werry, "What is a Robot companion - Friend, Assistant or Butler?" in Proceedings of IEEE RSJ International Conference on Intelligent Robot Systems (IROS'05). 2005. pp. 1488-1493

[6] H. Lehmann, D. S. Syrdal, K. DAutenhahn, G. J. Gelderblom, S. Bedaf, F. Amirabdollahian, "What Should a Robot Do For You? - Evaluating the Needs of the Elderly in the UK (in Press)" in The Sixth International Conference on Advances in Computer-Human Interactions (ACHI 2013). 2013.
[7] M. L. Walters, S. N. Woods, K. L. Koay, K. Dautenhahn, "Practical and Methodological Challenges in Designing and Conducting Human-Robot Interaction Studies" in Proceedings of the AISB'05 Symposium on Robot Companions Hard Problems and Open Challenges in Human-Robot Interaction. 2005. pp. 110-119
[8] A. Green, H. Huttenrauch, K. Severinson Eklundh, "Applying the Wizard of Oz Franework to Co-Operative Service Discovery and Configuration" in Proceedings of the 13th IEEE International Workshop on Robot and Human Interactive Communication (RO-MAN 2004). 2004. pp. 575-580
[9] A. Green, E. A. Topp, H. Huttenrauch, "Measuring Up as an Intelligent Robot – On the Use of High-Fidelity Simulations for Human-Robot Interaction Research" in Proceedings of Performance Metrics for Intelligent Systems Workshop (PerMIS '06). 2006. pp. 247 - 252
[10] S. N. Woods, M. L. Walters, K. L. Koay, K. Dautenhahn, "Comparing Human Robot Interaction Scenarios Using Live and Video Based Methods: Towards a Novel Methodological Approach" in Proceedings of The 9th International Workshop on Advanced Motion Control (AMC'06). 2006. pp. 750-755
[11] S. Ylirisku, J. Buur, Designing with Video. Springer, 2007.
[12] M. Lohse, M. Hanheide, B. Wrede, M. L. Walters, K. L. Koay, D. S. Syrdal, A. Green, H. Hüttenrauch, K. Dautenhahn, G. Sagerer, K. Severinson-Eklundh, "Evaluating extrovert and introvert behaviour of a domestic robot – a video study" in Proceedings of the 17th IEEE International Symposium on Robot and Human Interactive Communication (RoMan 08). 2008. pp. 488-493
[13] S. N. Woods, M. L. Walters, K. L. Koay, K. Dautenhahn, "Methodological Issues in HRI: A Comparison of Live and Video-Based Methods in Robot to Human Approach Direction Trials" in Proceedings of The 15th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN06). 2006. pp. 51-58
[14] M. Rice, A. F. Newell, M. Morgan, "Forum Theatre as a Requirements Gathering Methodology in the Design of a Home Telecommunication System for Older Adults." Behaviour and Information Technology, 2007, 26(4). pp. 232-331
[15] A. Newell, A. Carmichael, M. Morgan, A. Dickinson, "The use of theatre in requirements gathering and usability studies." Interacting with Computers, 2006, 18. pp. 996-1011
[16] D. V. Lu & W. D. Smart, "Human-Robot Interactions as Theatre" in Proceedings of the 20th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN 2011). 2011.pp. 473-478
[17] D. Lu, "Ontology of Robot Theatre" in Proceedings of the Workshop on Robotics and Performing Arts: Reciprocal Influences. (ICRA 2012). 2012.
[18] C. Breazeal, A. Brooks, J. Gray, M. Hancher, J. McBean, W. D. Stiehl, J. Strickon, "Interactive Robot Theatre." Communications of the ACM, 2003, 46(7). pp. 76-85
[19] D. V. Lu, W. D. Smart, "Human-Robot Interactions as Theatre" in Proceedings of the 20th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN 2011). 2011. pp. 473-478
[20] A. R. Chatley, K. Dautenhahn, M. L. Walters, D. S. Syrdal, B. Christianson, "Theatre as a Discussion Tool in Human-Robot Interaction Experiments: A Pilot Study" in Proceediongs of the Third International Conference on Advances in Computer-Human Interactions (ACHI 10). 2010.
[21] D. S. Syrdal, K. Dautenhahn, M. L. Walters, K. L. Koay, N. R. Otero, "The Theatre Methodology for Facilitating Discussion in Human-Robot Interaction on Information Disclosure in a Home Environment" in Proceedings of the 20th IEEE International Symposium on Robot and Human Interactive Communication (Ro-Man 2011). 2011. pp. 479-484
[22] A. Light, L. Weaver, P. Healey, G. Simpson, "Adventures in the Not Quite Yet: Using Performance Techniques to Raise Design Awareness About Digital Networks" in Proceeding of the Undisciplined! Design Research Society Conference. 2008.
[23] J. Carrol, Scenario-based Design. Envisioning Work and Technology in System Development. John Wiley & Sons, 1995.
[24] J. Carroll, "Five Reasons for Scenario-Based Design." Interacting With Computers, 2000, 13. pp. 43-60
[25] M. L. Walters, D. S. Syrdal, K. Dautenhahn, R. te Boekhorst, K. L. Koay, "Avoiding the Uncanny Valley – Robot Appearance, Personality and Consistency of Behavior in an Attention-Seeking Home Scenario for a Robot Companion." Journal of Autonomous Robots, 2008, 24(2). pp. 159-178
[26] K. L. Koay, E. A. Sisbot, D. S. Syrdal, M. L. Walters, K. Dautenhahn, Alami R., "Exploratory Studies of a Robot Approaching a Person in the Context of Handing Over an Object" in Proceedings of AAAI - Spring Symposium 2007: SS07, Multidisciplinary Collaboration for Socially Assistive Robotics , AAAI Technical Report. 2007. pp. 18-24
[27] A. Beck, A. Hiolle, A. Mazel, L. Canamero, "Interpretation of Emotional Body Language Displayed by Robots" in Proceedings of the 3rd ACM Workshop on Affective Interaction in Natural Environments, Co-located with ACM Multimedia 2010. 2010. pp. 37 - 42
[28] D. S. Syrdal, K. L. Koay, M. Gacsi, M. L. Walters, K. Dautenhahn, "Video Prototyping of Dog-Inspired Non-Verbal Affective Communication for an Appearance Constrained Robot" in Proceedings of 19th International Symposium in Robot and Human Interactive Communication (RoMan 2010). 2010. pp. 632-637
[29] M. L. Walters, M. Lohse, M. Hanheide, B. Wrede, D. S. Syrdal, K. L. Koay, A. Green, H. Hüttenrauch, K. Dautenhahn, G. Sagerer, K. Severinson-Eklundh, "Evaluating the Robot Personality and Verbal Behavior of Domestic Robots Using Video-Based Studies." Advanced Robotics, 2011, 25(18). pp. 2233-2254
[30] K. L. Koay, D. S. Syrdal, M. L. Walters, K. Dautenhahn, "A User Study on Visualization of Agent Migration between Two Companion Robots" in Proceeding of the 13th International Conference on Human-Computer Interaction (HCII 2009). 2009.
[31] K. L. Koay, D. S. Syrdal, K. Dautenhahn, K. Arent, L. Malek, B. Kreczmer, Companion Migration – Initial Participants' Feedback from a Video-Based Prototyping Study. In Mixed Reality and Human-Robot Interaction, Series - Intelligent Systems, Control and Automation: Science and Engineering. Xiangyu Wang (Ed.). 2011. pp. 623-637.
[32] D. S. Syrdal, K. L. Koay, M. L. Walters, K. Dautenhahn, "The Boy-Robot Should Bark - Children’s Impressions of Agent Migration into Diverse Embodiments" in Proceedings of the New Frontiers in HRI Symposium, (AISB 2009). 2009.
[33] F. Papadopoulos, K. Dautenhahn, W. C. Ho, M. L. Walters, "AIBOcom: Designing Robot Enhanced Human-Human Remote Communication Technology" in Proceedings of the International Conference on Kansei Engineering and Emotion Research 2010 (KEER'10) . 2010.
[34] Mobile Robots. http://www.mobilerobots.com/.
[35] Aibo. http://support.sony-europe.com/aibo/.
[36] F. D. Polit, B. P. Hungler, Nursing Research: Principles and Methods. London: Lippincott, Williams and Wilkins, 1999.
[37] B. DiCicco-Bloom, B. F. Crabtree, "The Qualitative Research Interview." Medical Education, 2006, 40(4). pp. 314-321
[38] W. Couchman, J. Dawson, Nursing and Health Care Research. London: Scutari Press, 1999.
[39] A. Whittaker, G. R. Williamson, Succeeding in Research Project Plans and Literature Reviews for Nursing Students. Exeter: Learning Matters, 2011.