Strategies to adapt and implement health system guidelines ...

Cellular Automata Applied in Remote Sensing
to Implement Contextual Pseudo-fuzzyClassification
Moises Espınola1, Rosa Ayala1, Saturnino Leguizamon2,Luis Iribarne1, and Massimo Menenti3
1 Applied Computing Group, University of Almerıa, Spain2 Regional Faculty, National Technnological University, Mendoza, Argentina
3 Aerospace Engineering Optical and Laser Remote Sensing, TUDelft, Netherlands
Abstract. Nowadays, remote sensing is used in many environmentalapplications, helping to solve and improve the social problems derivedfrom them. Examples of remotely sensed applications include soil qualitystudies, water resources searching, environmental protection or meteoro-logy simulations. The classification algorithms are one of the most impor-tant techniques used in remote sensing that help developers to interpretthe information contained in the satellite images. At present, there areseveral classification processes, i.e., maximum likelihood, paralelepipedor minimum distance classifier. In this paper we investigate a new sate-llite image classification Algorithm based on Cellular Automata (ACA),a technique usually used by researchers on complex systems. There arenot previous works related to satellite image classification with cellu-lar automata. This new kind of satellite image classifier, that improvesthe results obtained by classical algorithms in several aspects, has beenvalidated and experimented in the SOLERES framework.
1 Introduction
Remote sensing is the most relevant science that allows us the acquisition ofinformation about the surface of the land and environmental information valueswithout having actual contact with the area being observed [14]. This sciencecan be used in many environmental applications, helping to solve and improvethe problems derived from them. Examples of remotely sensed applications in-clude soil quality studies, water resources searching, environmental protectionor meteorology simulations, among others.
The classification algorithms are one of the most important techniques usedin remote sensing that help developers to interpret the information contained inthe satellite images. The aim of satellite images classification is to divide imagepixels into discrete classes (spectral classes). The resulting classified image isessentially a thematic map of the original image [15]. These algorithms havereached a great advance in the last years. The analysts use the classificationalgorithms to interpret the information contained in the satellite images. In theliterature, there are different procedures to classify satellite images.
S. Bandini et al. (Eds.): ACRI 2010, LNCS 6350, pp. 312–321, 2010.c© Springer-Verlag Berlin Heidelberg 2010

Cellular Automata Applied in Remote Sensing 313
In spite of the great number of classifiers that exist, there are several re-searchers studying new classification methods because there is not a 100% effi-cient classifier. In this paper we propose a new procedure for the classification ofsatellite images. The new classification Algorithm based on Cellular Automata(ACA) uses this technique for the assignment of the satellite image pixels to thedifferent spectral classes.
The rest of the paper is structured as follows. Section 2 describes the basicfeatures of the spectral and contextual image classification algorithms. Section 3describes the basic aspects of cellular automata and the classical applications inremote sensing. In section 4 we focus in the use of cellular automata to classifysatellite images (ACA algorithm). Section 5 shows the results obtained with theapplication of ACA in the SOLERES framework. Finally, in section 6, we finishthe paper exposing future work.
2 Spectral and Contextual Classification of SatelliteImages
Common classification procedures can be broken down into two divisions basedon the method used: supervised and unsupervised classification, whose classifi-cation methods are based on the spectral properties of the satellite image pixels.The use of supervised or unsupervised procedures depends of the analyst know-ledge about the zone to study [1].
In an unsupervised classification algorithm, the analyst only specifies the num-ber of classes, and the algorithm groups the satellite image pixels based solelyon the numerical information in the data. In these algorithms, the analyst hasnot to know the zone to study. There are many unsupervised classification algo-rithms, like the Isodata algorithm, K-means, Leader, MaxiMin or Neural Modelunsupervised.
In a supervised classification, the analyst selects samples of the different ele-ments to identify the pixels in the image. In this method the analyst knowledgeof the study area determines the quality of the training set. Then, the computeruses an algorithm to compare each pixel in the image to these signatures. Thepixels are labelled as the class most closely resembles digitally [2]. There areseveral types of statistics based supervised classification algorithms. Some of themore popular ones are parallelepiped, minimum distance, maximum likelihood,Fuzzy supervised, neural model and Mahalanobis distance, among others.
These spectral supervised and unsupervised classification algorithms workswell in non-noisy images and if the spectral properties of the pixels determine theclasses sufficiently well. However, if noise or substantial variations in class pixelproperties are present, the resulting image classification may have many small(often one-pixel) regions which are misclassified. Several standard approachescan be applied to avoid this misclassification, like using contextual information inaddition to spectral data. There are several contextual classification algorithmsthat use mean values, variances or texture description from a pixel neighbour-hood to improve that pixel spectral classification.
314 M. Espınola et al.
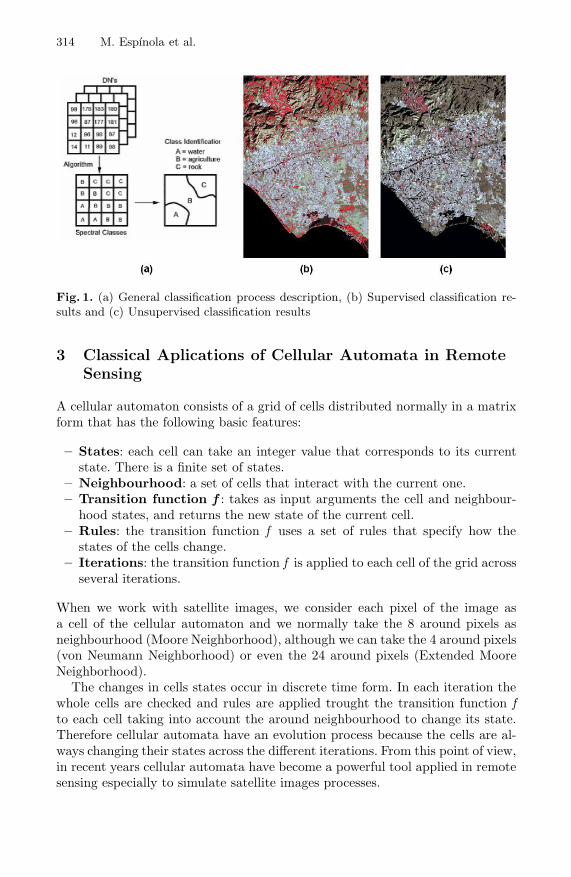
Fig. 1. (a) General classification process description, (b) Supervised classification re-sults and (c) Unsupervised classification results
3 Classical Aplications of Cellular Automata in RemoteSensing
A cellular automaton consists of a grid of cells distributed normally in a matrixform that has the following basic features:
– States: each cell can take an integer value that corresponds to its currentstate. There is a finite set of states.
– Neighbourhood: a set of cells that interact with the current one.– Transition function f : takes as input arguments the cell and neighbour-
hood states, and returns the new state of the current cell.– Rules: the transition function f uses a set of rules that specify how the
states of the cells change.– Iterations: the transition function f is applied to each cell of the grid across
several iterations.
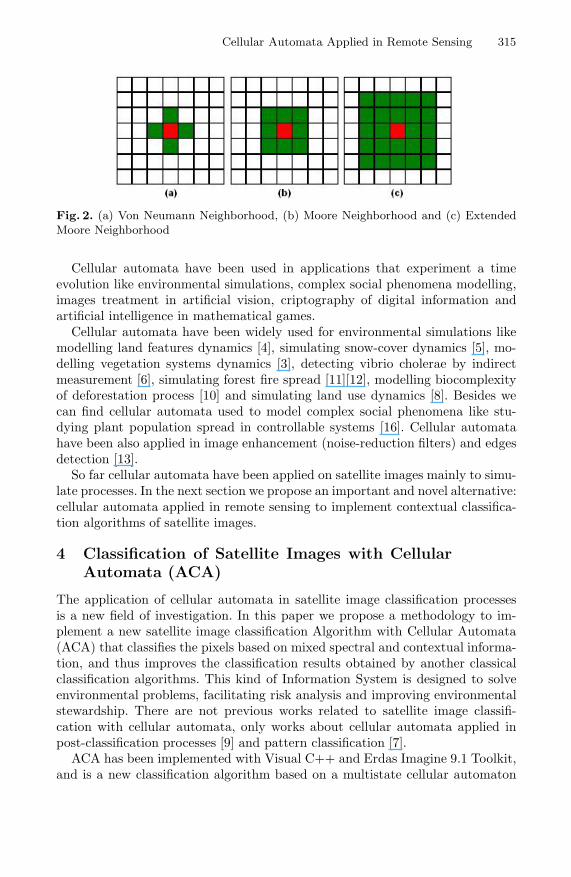
When we work with satellite images, we consider each pixel of the image asa cell of the cellular automaton and we normally take the 8 around pixels asneighbourhood (Moore Neighborhood), although we can take the 4 around pixels(von Neumann Neighborhood) or even the 24 around pixels (Extended MooreNeighborhood).
The changes in cells states occur in discrete time form. In each iteration thewhole cells are checked and rules are applied trought the transition function fto each cell taking into account the around neighbourhood to change its state.Therefore cellular automata have an evolution process because the cells are al-ways changing their states across the different iterations. From this point of view,in recent years cellular automata have become a powerful tool applied in remotesensing especially to simulate satellite images processes.
Cellular Automata Applied in Remote Sensing 315
Fig. 2. (a) Von Neumann Neighborhood, (b) Moore Neighborhood and (c) ExtendedMoore Neighborhood
Cellular automata have been used in applications that experiment a timeevolution like environmental simulations, complex social phenomena modelling,images treatment in artificial vision, criptography of digital information andartificial intelligence in mathematical games.
Cellular automata have been widely used for environmental simulations likemodelling land features dynamics [4], simulating snow-cover dynamics [5], mo-delling vegetation systems dynamics [3], detecting vibrio cholerae by indirectmeasurement [6], simulating forest fire spread [11][12], modelling biocomplexityof deforestation process [10] and simulating land use dynamics [8]. Besides wecan find cellular automata used to model complex social phenomena like stu-dying plant population spread in controllable systems [16]. Cellular automatahave been also applied in image enhancement (noise-reduction filters) and edgesdetection [13].
So far cellular automata have been applied on satellite images mainly to simu-late processes. In the next section we propose an important and novel alternative:cellular automata applied in remote sensing to implement contextual classifica-tion algorithms of satellite images.
4 Classification of Satellite Images with CellularAutomata (ACA)
The application of cellular automata in satellite image classification processesis a new field of investigation. In this paper we propose a methodology to im-plement a new satellite image classification Algorithm with Cellular Automata(ACA) that classifies the pixels based on mixed spectral and contextual informa-tion, and thus improves the classification results obtained by another classicalclassification algorithms. This kind of Information System is designed to solveenvironmental problems, facilitating risk analysis and improving environmentalstewardship. There are not previous works related to satellite image classifi-cation with cellular automata, only works about cellular automata applied inpost-classification processes [9] and pattern classification [7].
ACA has been implemented with Visual C++ and Erdas Imagine 9.1 Toolkit,and is a new classification algorithm based on a multistate cellular automaton
316 M. Espınola et al.
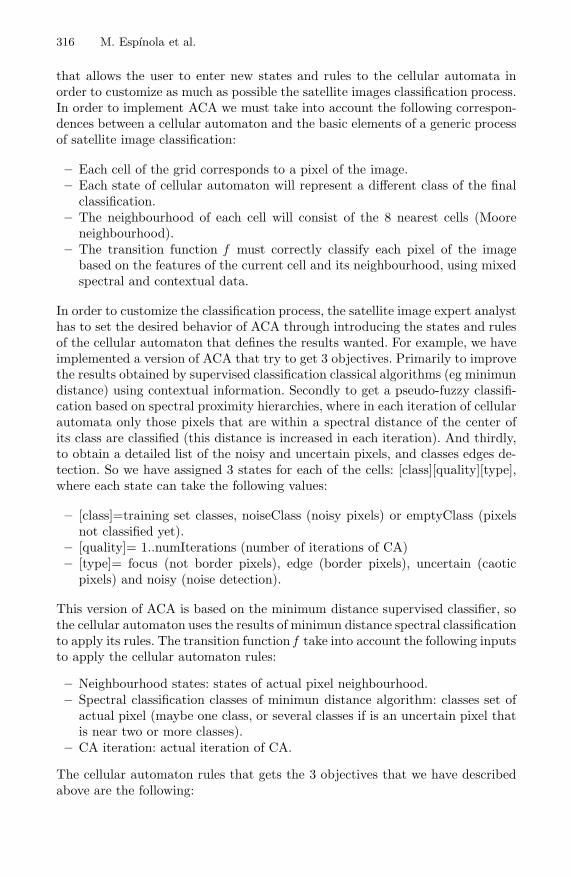
that allows the user to enter new states and rules to the cellular automata inorder to customize as much as possible the satellite images classification process.In order to implement ACA we must take into account the following correspon-dences between a cellular automaton and the basic elements of a generic processof satellite image classification:
– Each cell of the grid corresponds to a pixel of the image.– Each state of cellular automaton will represent a different class of the final
classification.– The neighbourhood of each cell will consist of the 8 nearest cells (Moore
neighbourhood).– The transition function f must correctly classify each pixel of the image
based on the features of the current cell and its neighbourhood, using mixedspectral and contextual data.
In order to customize the classification process, the satellite image expert analysthas to set the desired behavior of ACA through introducing the states and rulesof the cellular automaton that defines the results wanted. For example, we haveimplemented a version of ACA that try to get 3 objectives. Primarily to improvethe results obtained by supervised classification classical algorithms (eg minimundistance) using contextual information. Secondly to get a pseudo-fuzzy classifi-cation based on spectral proximity hierarchies, where in each iteration of cellularautomata only those pixels that are within a spectral distance of the center ofits class are classified (this distance is increased in each iteration). And thirdly,to obtain a detailed list of the noisy and uncertain pixels, and classes edges de-tection. So we have assigned 3 states for each of the cells: [class][quality][type],where each state can take the following values:
– [class]=training set classes, noiseClass (noisy pixels) or emptyClass (pixelsnot classified yet).
– [quality]= 1..numIterations (number of iterations of CA)– [type]= focus (not border pixels), edge (border pixels), uncertain (caotic
pixels) and noisy (noise detection).
This version of ACA is based on the minimum distance supervised classifier, sothe cellular automaton uses the results of minimun distance spectral classificationto apply its rules. The transition function f take into account the following inputsto apply the cellular automaton rules:
– Neighbourhood states: states of actual pixel neighbourhood.– Spectral classification classes of minimun distance algorithm: classes set of
actual pixel (maybe one class, or several classes if is an uncertain pixel thatis near two or more classes).
– CA iteration: actual iteration of CA.
The cellular automaton rules that gets the 3 objectives that we have describedabove are the following:
Cellular Automata Applied in Remote Sensing 317
– If the number of spectral classification classes is 1, and the neighbourhoodclass states are emptyClass or the same as actual pixel:[class][quality][type] = spectralClass, CAiteration, focus
– If the number of spectral classification classes is 1, and the neighbourhoodclass states are different than actual pixel class:[class][quality][type] = spectralClass, CAiteration, edge
– If the number of spectral classification classes is 1 and the spectralClass isnoiseClass :[class][quality][type] = majority class of the neighbourhood, CAiteration,noisy
– If the number of spectral classification classes is bigger than 1:[class][quality][type] = majority class of the neighbourhood among the du-bious classes, CAiteration, uncertain
In the next section we show the results obtained with this particular version ofthe ACA algorithm.
5 Results and Conclusions
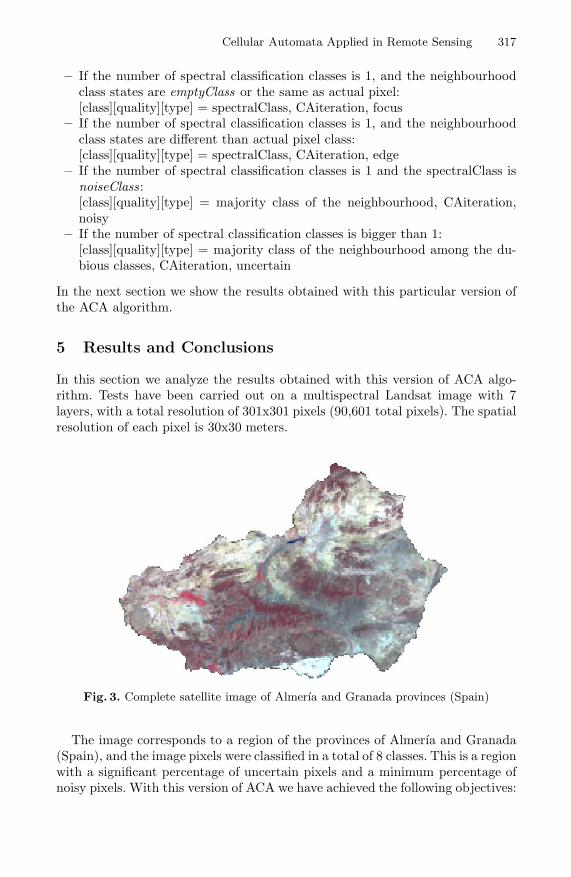
In this section we analyze the results obtained with this version of ACA algo-rithm. Tests have been carried out on a multispectral Landsat image with 7layers, with a total resolution of 301x301 pixels (90,601 total pixels). The spatialresolution of each pixel is 30x30 meters.
Fig. 3. Complete satellite image of Almerıa and Granada provinces (Spain)
The image corresponds to a region of the provinces of Almerıa and Granada(Spain), and the image pixels were classified in a total of 8 classes. This is a regionwith a significant percentage of uncertain pixels and a minimum percentage ofnoisy pixels. With this version of ACA we have achieved the following objectives:
318 M. Espınola et al.
a) Improving the quality of the pixels classification using contextualinformation.ACA improves the results obtained by another supervised classification al-gorithms, because in the classification process of each image pixel it uses thearound pixels as neighbourhood in the transition function f, and this rela-tionship among the image pixels offers an optimal final classification. In thisexperiment we compared the classification results obtained from the classi-cal minimum distance algorithm with ACA based on minimum distance.To compare these algorithms have calculated the confusion matrix betweenthe two classified images and an image from either ranked fieldwork. Thecomparation can be seen in the following two tables:
Table 1. Confusion matrix of the minimum distance algorithm
Class 1 Class 2 Class 3 Class 4 Class 5 Class 6 Class 7 Class 8
Class 1 0 0 0 0 0 0 0 0Class 2 789 6080 355 0 0 0 0 0Class 3 1247 0 9447 532 0 0 0 0Class 4 1547 0 2 11998 242 0 0 0Class 5 1555 0 0 52 12827 3 27 0Class 6 1027 0 0 47 281 8330 35 1Class 7 1513 0 0 0 250 12 13050 0Class 8 1396 0 0 0 0 66 381 11242
Table 2. Confusion matrix of the ACA algorithm
Class 1 Class 2 Class 3 Class 4 Class 5 Class 6 Class 7 Class 8
Class 1 0 0 0 0 0 0 0 0Class 2 123 6326 611 54 62 11 18 14Class 3 179 0 9648 963 240 74 73 37Class 4 205 0 5 12282 777 252 174 73Class 5 194 0 1 58 13254 88 713 135Class 6 123 0 0 47 291 8699 161 330Class 7 130 0 0 1 254 16 13724 661Class 8 217 0 0 0 0 68 407 11966
The number of well classified pixels in each algorithm is obtained by addingthe values in the main diagonal of the table. In the case of the minimumdistance algorithm there are a total of 72.974 well classified pixels (80%well classified), and in the ACA algorithm there are a total of 75.899 wellclassified pixels (84% well classified). Therefore the quality of the final classi-fication has improved by 4%, also we have grouped in a single algorithm apreclassification process(noise reduction), the proper classification processand a postclassification process(improving uncertain pixels).
Cellular Automata Applied in Remote Sensing 319
b) Obtaining a pseudo-fuzzy classification based on spectral proximityhierarchies in feature space.With ACA we can obtain a hierarchical classification based on spectral pro-ximity in feature space, so that in each iteration of cellular automaton onlythose pixels in the image that are within a distance from the center of itsclass are classified, and this distance is increasing at each iteration. Thus,the pixels classified in a particular iteration are more reliable than those thatfall in the next iteration, and so on.
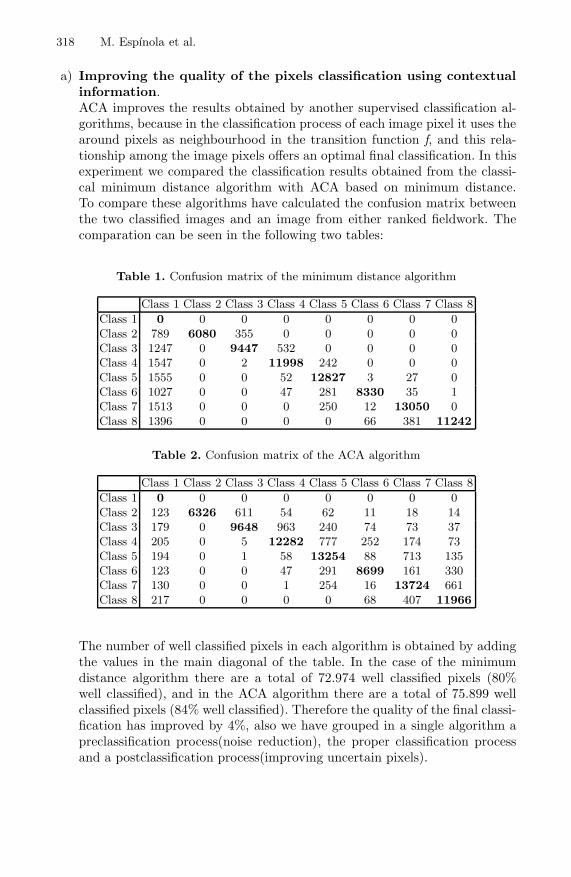
This method of classification has similar behavior to the fuzzy classifi-cation, although not exactly alike, so we have called pseudo-fuzzy. In theFigure 4 we show a sequence of images where we can see the results of ourimage classification by dividing the process in 6 iterations of the cellularautomaton.
The assignment of colors to each class is set to gray scale, so that blackpixels are those that have not yet been classified. As you can see in the firstiteration, the number of classified pixels are quite small. These pixels arethose that are closer from the standpoint of the average spectral classes, andtherefore are more reliable. Some of these pixels even belong to the trainingset chosen by the expert. In the next iterations the threshold distance to theaverage of each class will increase, so that others pixels that are spectrallyfarther in its class will be classified. In the last iteration, the uncertain andnoisy pixels are classified, which are often the most problematic. Thanksto these results, experts can detect visually much more reliable problematic
Fig. 4. Pseudo-fuzzy classification with 6 iterations of cellular automaton
320 M. Espınola et al.
pixels in the classification process, valuable information in the process ofsatellite images analysis.
c) Boundary, uncertain and noisy pixel detection.In addition, the ACA algorithm also provides the expert with a list of bor-der pixels of each class represented in the image as well as uncertain andnoisy pixels, in order to have more additional information related to theclassification process to improve the subsequent analysis of results obtained.Thus, the ACA algorithm incorporates aspects of pre-sorting tasks (detectionand elimination of image noise), classification (enhanced in our case) andpostclasificacin (correction uncertain pixel) satellite imagery.
6 Future Work
Some possible future work are shown below:
a) Implementing new versions of the ACA algorithm based on new states andrules of cellular automaton to further customize the classification process.
b) Using software agents to reduce the computational cost, touring various re-gions of the image in parallel.
c) Creating a Erdas Imagine pluggin that allows a custom classification basedon cellular automtata.
Acknowledgments
This work has been partially supported by the EU (FEDER) and the Spa-nish MEC under grant of the project I+D TIN2007-61497 “Soleres. A Spatio-Temporal Evironmental Management System based on Neural-Networks, Agentsand Software Components”.
References
1. Ayala, R., Menenti, M., Girolana, D.: Evaluation methodology for classificationprocess of digital images Igarss 2002. In: IEEE Int. Geoscience and Remote Sens-ing Symposium and the 24th Canadian Symposium on Remote Sensing, Toronto,Canada, pp. 3363–3365 (2002)
2. Ayala, R., Becerra, A., Flores, I.M., Bienvenido, J.F., Dıaz, J.R.: Evaluation ofgreenhouse covered extensions and required resources with satellite images andGIS. Almerıa´s case. In: Second European Conference of the European Federa-tion for Information Technology in Agriculture, Food and the Environment, Bonn,Germany, pp. 27–30 (1999)
3. Balzter, H., Braun, P., Kuhler, W.: Cellular automata models for vegetation dy-namics. Ecological Modelling 107, 113–125 (1998)
4. Leguizamon, S.: Modeling land features dynamics by using cellular automata tech-niques. In: Proceedings of the ISPR Technical Comision 7 Mid-Term Symposium“From pixels to Processes”, Enschede, The Netherlands, pp. 497–501 (2006)
Cellular Automata Applied in Remote Sensing 321
5. Leguizamon, S.: Simulation of snow-cover dynamics using the cellular automataapproach. In: Proceedings of the 8th International Symposium on High MountainRemote Sensing Cartography, La Paz, Bolivia, pp. 87–91 (2005)
6. Lobitz, B., Beck, L., Huq, A., Woods, B., Fuchs, G., Faruque, A., Colwell, R.: Cli-mate and infectious disease: use of remote sensing for detection of Vibrio choleraeby indirect measurement. Proceedings of the National Academic of Sciences of theUSA 97(4), 1438–1443 (2000)
7. Maji, P., Shaw, C., Ganguly, N., Sikdar, B., Chaudhuri, P.: Theory and applicationof cellular automata for pattern classification. Fundamenta Informaticae 58(3-4),321–354 (2003)
8. Messina, J., Walsh, S.: Simulating land use and land cover dynamics in the ecuado-rian Amazon through cellular automata approaches and an integrated GIS. In:Open Meeting of the Human Dimensions of Global Environmental Change Re-search Community in Rio de Janeiro, Brazil, pp. 6–8 (2001)
9. Mojaradi, B., Lucas, C., Varshosaz, M.: Using learning cellular automata for postclassification satellite imagery. International Archives of Photogrammetry RemoteSensing and Spatial Information Sciences 35(4), 991–995 (2004)
10. Moreno, N., Quintero, R., Ablan, M., Barros, R., Davila, J., Ramırez, H., Tonella,G., Acevedo, M.: Biocomplexity of deforestation in the Caparo tropical forest re-serve in Venezuela: an integrated multi-agent and cellular automata model. Envi-ronmental Modelling and Software 22, 664–673 (2007)
11. Muzy, A., Innocenti, E., Aiello, A., Santucci, J.F., Santonio, P.A., Hill, D.: Mode-lling and simulation of ecological propagation processes: application to fire spread.Environmental Modelling and Software 20, 827–842 (2005)
12. Muzy, A., Innocenti, E., Aiello, A., Santucci, J.F., Santonio, P.A., Hill, D.: Dynamicstructure cellular automata in a fire spreading application. In: First InternationalConference on Informatics in Control, Automation and Robotics, Setubal, Portu-gal, pp. 143–151 (2004)
13. Popovici, A., Popovici, D.: Cellular automata in image processing. In: Proceedingsof the 15th International Symposium on the Mathematical Theory of Networksand Systems, 6p. (2002)
14. Rees, W.G.: Physical principles of remote sensing, 2nd edn. Cambridge UniversityPress, Cambridge (2001)
15. Schowengerdt, R.A.: Techniques for image processing and classification in remotesensing. Academic Press, London (1985)
16. Wang, J., Kropff, M., Lammert, B., Christensen, S., Hansen, P.: Using CA model toobtain insight into mechanism of plant population spread in a controllable system:annual weeds as an example. Ecological Modelling 166, 277–286 (2003)
Copyright © 2022 FDOKUMEN