
Analysis on vehicle and walking speeds of search and rescue ground crews in mountainous areas
10
Analysis on vehicle and walking speeds of search and rescue ground crews in mountainous areas Marta Ciesa, Stefano Grigolato n , Raffaele Cavalli University of Padua, Department of Land, Environment, Agriculture and Forestry, Viale dell'Università 16, 35020 Legnaro, PD, Italy article info Article history: Received 17 June 2013 Received in revised form 17 March 2014 Accepted 17 March 2014 Keywords: Mountain search and rescue Forest road network Trail network 4WD vehicles ATVs GIS abstract In recent times, the growing number of people enjoying nature-based tourism and recreation activities has led to an increase in search and rescue (SAR) missions in mountainous areas. During SAR responses time is of essence, and the speed of SAR ground responses is affected largely by the mode of transportation and the road and trail network. This study presents a detailed analysis of vehicle and walking speeds of SAR ground crews along a secondary transportation network and on off-trail areas, culminating in mode-specific regression models. Thereafter, these models are integrated into GIS to generate maps of the total accumulative travel time of a rescue area. This GIS model is then evaluated by calculating likely rescue times when using small All-Terrain Vehicles (ATV) as an alternative to 4WD cars. The results show that vehicle speeds strongly depend on the quality of the secondary transportation network in terms of roughness and gradient. The spatial analysis in the GIS model reveals that the alternative use of small ATV can reduce the total cumulative travel time of SAR crews significantly, especially in areas where the quality of the secondary transportation network is poor. Management implications With the ever increasing popularity of mountain-based outdoor activities, search and rescue (SAR) missions in challenging terrain are becoming increasingly important. Therefore, a rigorous analysis of the effectiveness of modes of transport as a function of terrain characteristics is an important contribution to SAR operations. The study finds that: A GIS based rescue concept is recommended as a precautionary measure in all mountainous areas; it should include trail characteristics to document the accessibility of the management area. An ATV is most likely the best means of ground transportation, especially when searching for missing recreationists and for providing first aid. In areas with frequent accidents it might worthwhile to consider improving trail conditions for ATV access. & 2014 Elsevier Ltd. All rights reserved. 1. Introduction The multifunctional use of natural resources (Farrell et al., 2000; Tomè, 2005) is also an important factor in mountainous areas (Beedie & Hudson, 2003, Perlik, Messerli, & Bätzing, 2001), especially in Central Europe and in the Alps (Breman et al., 2010). In this region, nature-based tourism and recreation activities (Thiene & Scarpa, 2008) have led to a consistent increase in the number of visitors to mountainous terrain (Muhar, Schauppenlehner, Brandenburg, & Arnberger, 2007). In view of this, Lischke, Byhahn, Westphal and Kessler (2001) initiated a discussion about the possible relationship between the increase in the number of participants in mountain- based outdoor recreation activities and the rising number of search and rescue (SAR) missions. The same discussion has emerged in North America, where Heggie (2008) confirms that the growing popularity of outdoor recreation and wilderness activities is one of the main causes for the increasing number of SAR operations, especially in National Parks (Boore & Bock, 2013, Heggie & Heggie, 2009). It is a common impression among rescuers that many injuries and fatalities in mountain areas are caused by the ignorance Contents lists available at ScienceDirect journal homepage: www.elsevier.com/locate/jort Journal of Outdoor Recreation and Tourism http://dx.doi.org/10.1016/j.jort.2014.03.004 2213-0780/& 2014 Elsevier Ltd. All rights reserved. n Corresponding author. E-mail addresses: [email protected] (M. Ciesa), [email protected] (S. Grigolato), [email protected] (R. Cavalli). Journal of Outdoor Recreation and Tourism 5-6 (2014) 48–57
Transcript of Analysis on vehicle and walking speeds of search and rescue ground crews in mountainous areas

Analysis on vehicle and walking speeds of search and rescue groundcrews in mountainous areas
Marta Ciesa, Stefano Grigolato n, Raffaele CavalliUniversity of Padua, Department of Land, Environment, Agriculture and Forestry, Viale dell'Università 16, 35020 Legnaro, PD, Italy
a r t i c l e i n f o
Article history:Received 17 June 2013Received in revised form17 March 2014Accepted 17 March 2014
Keywords:Mountain search and rescueForest road networkTrail network4WD vehiclesATVsGIS
a b s t r a c t
In recent times, the growing number of people enjoying nature-based tourism and recreation activitieshas led to an increase in search and rescue (SAR) missions in mountainous areas. During SAR responsestime is of essence, and the speed of SAR ground responses is affected largely by the mode oftransportation and the road and trail network. This study presents a detailed analysis of vehicle andwalking speeds of SAR ground crews along a secondary transportation network and on off-trail areas,culminating in mode-specific regression models. Thereafter, these models are integrated into GIS togenerate maps of the total accumulative travel time of a rescue area. This GIS model is then evaluated bycalculating likely rescue times when using small All-Terrain Vehicles (ATV) as an alternative to 4WD cars.
The results show that vehicle speeds strongly depend on the quality of the secondary transportationnetwork in terms of roughness and gradient. The spatial analysis in the GIS model reveals that thealternative use of small ATV can reduce the total cumulative travel time of SAR crews significantly,especially in areas where the quality of the secondary transportation network is poor.
M a n a g e m e n t i m p l i c a t i o n s
With the ever increasing popularity of mountain-based outdoor activities, search and rescue (SAR)missions in challenging terrain are becoming increasingly important. Therefore, a rigorous analysis of theeffectiveness of modes of transport as a function of terrain characteristics is an important contribution toSAR operations. The study finds that:
� A GIS based rescue concept is recommended as a precautionary measure in all mountainous areas; itshould include trail characteristics to document the accessibility of the management area.
� An ATV is most likely the best means of ground transportation, especially when searching for missingrecreationists and for providing first aid.
� In areas with frequent accidents it might worthwhile to consider improving trail conditions for ATVaccess.
& 2014 Elsevier Ltd. All rights reserved.
1. Introduction
The multifunctional use of natural resources (Farrell et al., 2000;Tomè, 2005) is also an important factor in mountainous areas (Beedie& Hudson, 2003, Perlik, Messerli, & Bätzing, 2001), especially inCentral Europe and in the Alps (Breman et al., 2010). In this region,nature-based tourism and recreation activities (Thiene & Scarpa, 2008)have led to a consistent increase in the number of visitors to
mountainous terrain (Muhar, Schauppenlehner, Brandenburg, &Arnberger, 2007). In view of this, Lischke, Byhahn, Westphal andKessler (2001) initiated a discussion about the possible relationshipbetween the increase in the number of participants in mountain-based outdoor recreation activities and the rising number of searchand rescue (SAR) missions. The same discussion has emerged in NorthAmerica, where Heggie (2008) confirms that the growing popularityof outdoor recreation and wilderness activities is one of the maincauses for the increasing number of SAR operations, especially inNational Parks (Boore & Bock, 2013, Heggie & Heggie, 2009).
It is a common impression among rescuers that many injuries andfatalities in mountain areas are caused by the ignorance
Contents lists available at ScienceDirect
journal homepage: www.elsevier.com/locate/jort
Journal of Outdoor Recreation and Tourism
http://dx.doi.org/10.1016/j.jort.2014.03.0042213-0780/& 2014 Elsevier Ltd. All rights reserved.
n Corresponding author.E-mail addresses: [email protected] (M. Ciesa),
[email protected] (S. Grigolato), [email protected] (R. Cavalli).
Journal of Outdoor Recreation and Tourism 5-6 (2014) 48–57

of many participants who engage in mountain-based outdooractivities without the appropriate training, equipment, or even maps,and in ignorance of local weather conditions and their own physicalconditioning (Brandley, 2011, Heggie & Heggie, 2009). Consequentlythe number of SAR interventions increases, especially in areas whereoutdoor activities by casual mountain visitors is gaining popularity.Lischke, Berner, Kopp and Mann (2012) report the experiences of SARcrews in the Bavarian mountains, highlighting the fundamental roleof coordination of the rescue crews and the importance of appro-priate technologies for the specific mountain conditions.
SAR operations usually consist of two parts: the search formissing or distressed persons, usually followed by their rescue.The helicopter is one important tool during these operations(Doherty, Guo, & Alvarez, 2012). While the use of helicopters hasmany advantages over ground rescue, especially when fatalities areinvolved (Tomazin & Kovacs, 2003), helicopter operations are oftenhampered by local weather and terrain conditions. In fact helicop-ters may be asked to assist in wilderness SAR operations to quicklyprovide medical care and to transport injured persons. Otherwisethe priority for any medical helicopter involved in an SAR operationis safety (Grissom, Thomas, & James, 2006), which is considered ateach decision point according to the weather condition as well thelanding terrain. Doherty et al. (2012) recommend that helicopterlandings should meet specific safety standards. In fact, landing arescue helicopter in a wilderness environment requires suitably flatareas without adjacent tree canopies, and free of other hazards.Therefore, it is worthwhile to evaluate the employment of SARground crews, especially when the criteria for utilizing a helicopterare not fully satisfied (Grissom et al., 2006).
Forest roads (Janowsky & Becker, 2003) and mountain trails(Thiene & Scarpa, 2008) constitute highly relevant infrastructurefor rapid SAR responses by ground transportation such as 4WDvehicles or All-Terrain Vehicles (ATV) (Lischke et al., 2012).
So far the literature lacks any systematic analysis of the traveltimes required for SAR operations by ground vehicles and crewson foot during missions. Such an evaluation of response times bySAR crews when using secondary road and trail networks wouldbe highly useful, especially when considering the possible effect ofdifferent road and trail characteristics and types of vehicles.
This paper presents an analysis of vehicle and walking speedsof SAR ground crews along a secondary road network, a trailnetwork, and in off-trail areas in order to verify, with a GIS-basedmodel, the cumulative travel time when providing first aid toinjured people in rugged mountainous terrain.
2. Materials and methods
The study consists of the following elements:
1. Analysis of the speed of SAR ground vehicles related to the roadnetwork characteristics;
2. Analysis of the walking speed of a SAR crew along the trailnetwork and off-trail routes;
3. Creation of a GIS-based model for calculated travel time toevaluate the efficiency of specific ground vehicles as a functionof road and trail network conditions; and
4. Comparison of scenarios based on the use of different vehicles.
2.1. Study area
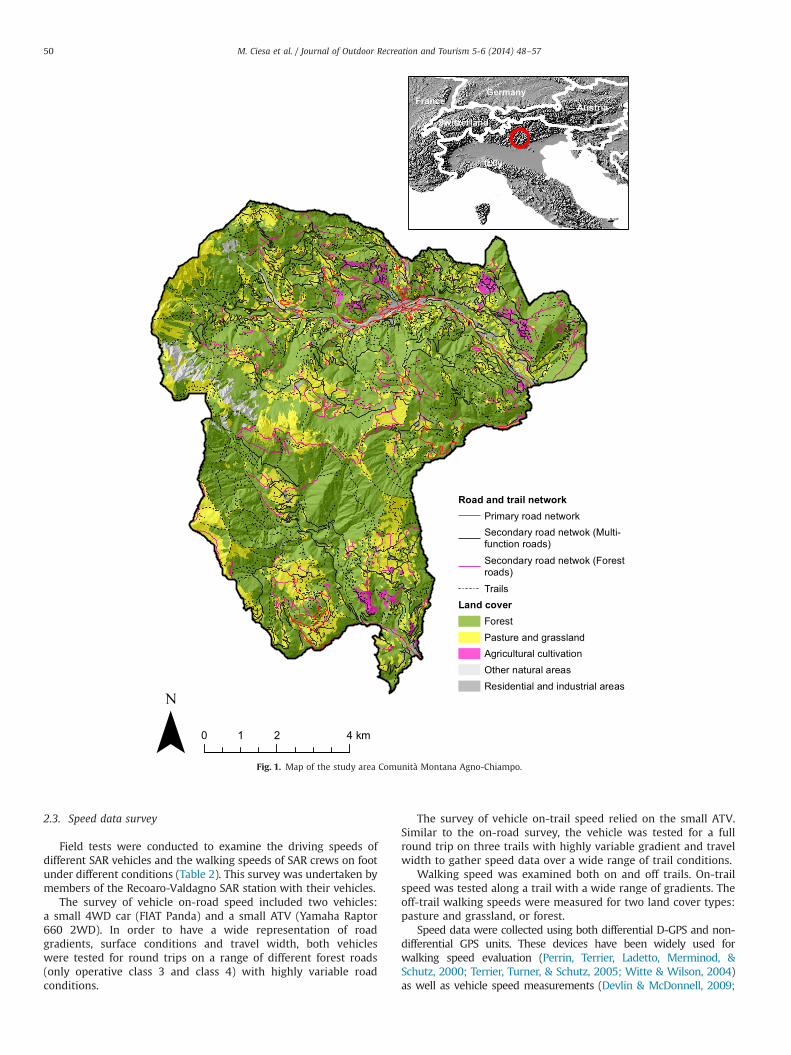
The area of the Comunità Montana Agno-Chiampo in north-eastern Italy (N45143000–45135000, E11108000–11118000) was iden-tified as a representative mountainous study area for the abovestated research questions (Fig. 1). The study area covers 90 km2
and ranges in elevation from 200 m to 2000 m a.s.l. The mostwidespread land cover is forest (64% of the area), followed bygrassland and pastures (23%). The low elevation portion of thearea contains a dense network of forest roads, most of them ofpoor standard, and hiking trails under forest cover. These roadsare mainly used by small forest landowners, mushroom pickers,hunters, mountain bikers and hikers. The higher elevation moun-tain area contains narrow forest roads with steep gradients andalpine trails that people mainly use to pursue outdoor activitieslike mountaineering, hiking and mountain biking.
Data of SAR missions for the 20 year period from 1992 to 2011provided by the local SAR Station (Recoaro-Valdagno, Vicenzaprovince) document an increase in the numbers of SAR responsesin recent years (CNSAS Recoaro-Valdagno). Between 2002 and 2011the local SAR station was engaged in 205 operations, attending to atotal of 230 injured people. The ground operations relied mostly onsmall 4WD vehicles because of the poor standards of the secondaryroad network. Almost one third (29.8%) of the missions occurred insnowy conditions, and helicopters were used in one quarter of theoperations. These trends mirror SAR events in other mountainousregions (Heggie, 2008; Hung & Townes, 2007; Lischke et al., 2001).The characteristics of the area are considered suitable to study theuse of small ATV as an alternative SAR mode of transport to supportground operations. The analysis below pertains to the snow-freeperiod only.
2.2. Road and trail network characterization
A geo-database of the road network containing the width,gradient, type of pavement and maintenance condition of all roadsin the study area was acquired from the local Forest Service(Regione del Veneto, 2011). Based on these variables, road sectionswere first categorized into functional classes according to theirmain use (public roads, multifunctional road and forest roads withrestricted access), and then categorized into five operationalclasses according to the main types of possible transportationsystems as a function of width and vehicle manoeuvrability.
The information about the road network was then adapted forthis study to serve as an operational description for the use of SARvehicles (Table 1), and the information about the road network wasintegrated with the information about the trail network extractedfrom aerial photos as well as technical and topographic maps.
During the summer of 2011, field surveys of the rural and forestroads as well as the trail network were conducted to verify andimprove the information about all roads and trails in the geo-database. Forestry roads were classified into uniform sectionsaccording to gradient (%), width (m) and surface condition (goodcondition; degradation starting; complete degradation of roadsurface). Trail sections suitable for ATVs were also divided intouniform sections by gradient (%) and surface conditions (regular,partially irregular, and irregular). Trail sections only suitable fortravel on foot were only classified in terms of gradient (%), whilethe classification of off-trail routes also included land cover(grassland and meadow or forest).
The travelled tracks (i.e., roads and trails) were surveyed using adifferential D-GPS antenna (PROXH TRIMBLEs) and a mapping-grade GPS handler (NOMAD TRIMBLEs) with a specific GPS-software (TERRASYNCs). The survey of the uniform section of eachtrack was based on the GPS coordinate acquired at the startingpoint of the section by averaging 120 measurements, ensuringan accuracy of the GPS coordinate of up to 20–25 cm. Hencethe slope distance, the gradient and the azimuth of the sectionwere measured by a laser rangefinder (Trupulses 360B – LaserTechnologys) at accuracies of 70.3–1.0 m in distance, 70.251 ininclination and 711 in azimuth.
M. Ciesa et al. / Journal of Outdoor Recreation and Tourism 5-6 (2014) 48–57 49
2.3. Speed data survey
Field tests were conducted to examine the driving speeds ofdifferent SAR vehicles and the walking speeds of SAR crews on footunder different conditions (Table 2). This survey was undertaken bymembers of the Recoaro-Valdagno SAR station with their vehicles.
The survey of vehicle on-road speed included two vehicles:a small 4WD car (FIAT Panda) and a small ATV (Yamaha Raptor660 2WD). In order to have a wide representation of roadgradients, surface conditions and travel width, both vehicleswere tested for round trips on a range of different forest roads(only operative class 3 and class 4) with highly variable roadconditions.
The survey of vehicle on-trail speed relied on the small ATV.Similar to the on-road survey, the vehicle was tested for a fullround trip on three trails with highly variable gradient and travelwidth to gather speed data over a wide range of trail conditions.
Walking speed was examined both on and off trails. On-trailspeed was tested along a trail with a wide range of gradients. Theoff-trail walking speeds were measured for two land cover types:pasture and grassland, or forest.
Speed data were collected using both differential D-GPS and non-differential GPS units. These devices have been widely used forwalking speed evaluation (Perrin, Terrier, Ladetto, Merminod, &Schutz, 2000; Terrier, Turner, & Schutz, 2005; Witte & Wilson, 2004)as well as vehicle speed measurements (Devlin & McDonnell, 2009;
Road and trail networkPrimary road networkSecondary road netwok (Multi-function roads)
Secondary road netwok (Forestroads)
TrailsLand cover
ForestPasture and grasslandAgricultural cultivationOther natural areasResidential and industrial areas
0 2 41 km
Italy
FranceAustria
Germany
Switzerland
Fig. 1. Map of the study area Comunità Montana Agno-Chiampo.
M. Ciesa et al. / Journal of Outdoor Recreation and Tourism 5-6 (2014) 48–5750
Devlin, McDonnell, & Ward, 2007, 2008; Holzleitner, Kanzian, &Stampfer, 2011; Muharrem & Sait, 2006). Many studies attest thatvehicle speed does not affect the accuracy of the acquired data (see, e.g., Veal, Taylor, McDonald, McLemore, & Dunn, 2001).
In this study vehicle speed was collected with a differentialD-GPS antenna (PROXH TRIMBLEs) and a mapping-grade GPShandler (NOMAD TRIMBLEs) with specific GPS software (TERRA-SYNCs). For the 4WD vehicle, the antenna was mounted on thecentre of the roof at a height of 2 m above ground. In the ATV, theantenna was also mounted at a height of 2 m off the ground, butpositioned at the rear of the vehicle. The D-GPS was set to recordthe speed in km/h every second. The recorded data were post-processed using a differential correction algorithm with availablerinex data from a GPS base station within a distance of 15 km.To gain a higher level of accuracy, data points with PDOP (posi-tional dilution of precision) values higher than 6 (Sigrist, Coppin, &Hermy, 1999) were eliminated from the dataset. PDOP valuesindicate the accuracy of GPS coordinates (latitude, longitude andelevation), based on the number of satellites and the geometry ofsatellite positions. The lower the PDOP indicator, the moreaccurate is the data.
The positional data for deriving the walking speeds of the SARcrew on and off trail were collected using a consumer-grade GPS(GARMINs 62CS). Walking speeds were subsequently calculatedby extracting the difference in travelled distance and altitude atintervals of 20 s in order to obtain better accuracy (75.4 m) thanin the case of shorter intervals.
All of the GPS data collected during the speed test were recordedin World Geographic System 1984 (WGS84) and projected in UTM32N. The data were converted into ARCGIS shape files and stored aspoint geometries along with all attributes collected by the GPS.
A GIS interpolation was thus necessary to assign speed valuesto the road and trail network. Using ArcGISs 10.0 (ESRI), thesurveyed sections were first assigned a direction of travel. Thespeed data were then overlapped to the road or trail if the distancebetween the speed points and the sections were within 5 m. Speedpoints with more than 5 m distance were eliminated from the
dataset. An average speed of the overlapped points was thencalculated for each of the homogenous road and trail sections andincluded in the dataset.
2.4. Statistical analysis
The SAR walking speed and vehicle speed constitute twoindependent samples which are not normally distributed. So theWilcoxon Mann–Whitney test was first used to investigate anydifferences between the speed of the 4WD car and the ATV alongthe forest road network. This test compared the mean travelspeeds for the operative classes 3 and 4, respectively (Table 1).Then the same test was used for a pair-wise comparison betweenwalking speeds in both on-trail and off-trail areas (in forest and ongrassland). All tests relied on a confidence level of 0.95 and thenull hypothesis assumed an equality of means.
Regression models were then used to investigate relationshipsbetween travel speed and influencing variables. The analysis ofspeed by transport mode was based on a linear model with all thestudied factors and covariates, the evaluation of their non-linear-ity, and the final model selection by removing variables that werenot significant at the 0.05 level. The linear regression modelassumed the use of logarithmically transformed variables in orderto express nonlinear models in linear model form. Therefore, thespeed models were tested for the best possible symmetricaldistributions of residuals of the regression models and to optimizethe coefficients. The homogeneity of variance was tested byLevene's test (o0.05). As the walking speed is generally fasterdownhill than uphill, the speed distributions were somewhatasymmetric around zero slope (i.e., perfectly flat sections), andtherefore speed models also include corrective coefficients forslope. These coefficients were empirically derived by computingthe simple regression models for downhill and uphill speedsseparately, and thereafter intersecting the models identifying theasymmetric shift of the regression models. Statistical analysis wasperformed using STATGRAPHICSs 16.1.
2.5. GIS-based model
The GIS-based model was developed to assess the accumulatedtravel time SAR ground crews need to reach a specific site. This GISmodel determines travel time based on the speed of SAR groundcrews in relation to the combination of different types of travel(by vehicle along roads and on foot along trails and off-trail areas).The main variable influencing the speed of vehicles and walkers isconsidered to be the gradient.
The model is divided into three modules: the first is for theroad and trail gradient calculation. The gradient is computed asthe maximum rate of change between a raster cell and itsneighbours. This approach is partly based on the methodology ofChiou, Tsai and Leung (2010) and Hawes, Dixon and Ling (2013)
Table 2Field speed survey tests.
Access mode Location Type of track Distanceinventoried(km)
Durationof the test(h:min:s)
Small 4WD car On-road Forest road (class 3and class 4)
32 02:23:19
Small ATV On-road Forest road (class 3and class 4)
36 01:51:03
Small ATV On-trail Trail and skidding trail 2.8 00:48:03SAR crews On-trail Mountaineering trail 4.2 00:54:30SAR crews Off-trail Grassland–forest 5.3 01:22:25
Table 1Operative classification of the road and trail network.
Class Description SAR vehicles Corresponding functional class
1 Low mobility and high load capacity Any first aid vehicle (including ordinaryambulance)
Primary road network
2 Low mobility and slightly above medium load capacity Any first aid vehicle (including ordinaryambulance)
Primary road network
3 High mobility and medium to slightly below medium loadcapacity
Small 4WD cars or off-road vehicles Secondary road network (multi-function and forestroads)
4 High mobility and low or null load capacity Small 4WD cars or off-road vehicles Secondary road network (multi-function and forestroads)
0 Not permanent skid roads or trails passable only with smallvehicles
Only small All-Terrain Vehicles (ATV) Trail network
M. Ciesa et al. / Journal of Outdoor Recreation and Tourism 5-6 (2014) 48–57 51
who calculated the gradient of each road and trail section (in 50 mintervals) in the Digital Elevation Model (DEM) to estimate thedifference in elevation of the two ends of the same segment.
Once slope information is obtained, the second module calcu-lates travel time of SAR vehicles along the road and trail network.The model considers different types of vehicles as their character-istics affect the ability of SAR crews to drive along different typesof routes (forest roads and trails).
The third module calculates walking time along the trail net-work evaluating trail gradient and walking time for off-trail areasin relation to land cover and path gradient.
The central GIS analysis of the model is based on the least-costtechnique used in conjunction to effectively model the dispersion andmovement processes (Burrough & McDonnell, 1998). The conventionalraster-based least-cost technique, in which the connectivity graph isconstructed by treating each raster cell as a node and linking eachnode to its adjacent neighbours, has been widely used to determineoptimum paths in space (Antikainen, 2013). The least-cost technique isthus used to determine the minimum accumulative travel cost from asource to each cell location on a raster. The technique calculates thetotal travel time over a cost surface and compensates for the surfacedistance and horizontal and vertical factors influencing the total costof moving from one location to another.
The GIS-based model was developed in ArcGISs 10.0 using theModel Builder geo-processing tool (ESRI). The main input layersare the road and trail network (vector data), the Digital ElevationModel (DEM, raster data) and Land Use Cover map integrated withthe forest type map (vector data). The input variables are the typeand speed of SAR ground vehicles and the walking speed of SARcrews for trails and off-trail areas considering different land cover.
3. Results
3.1. Vehicle speed
A summary of the results of SAR vehicle speeds along forestroads and hiking trails is presented in Table 3. The average speed,determined by the observations corresponding to the speed D-GPSpoints filtered by a maximum PDOP of 6, results as being approxi-mately 14 km/h on-road for the small 4WD car and 24 km/h forthe small ATV.
The Wilcoxon Mann–Whitney test rejected the null hypothesisin favour of the alternative for both the operative classes 3 and 4(Mann–Whitney U¼39,596.0; po0.001). The covariance analysisdemonstrates the importance of the different variables influencingvehicle speed (Table 4). The road gradient is the variable that mostinfluences both vehicles driven on forest roads, explainingapproximately 19% of the variance for the small 4WD car and20% for the small ATV. The ANCOVA analysis also reveals the effect
of the road condition on both vehicles (about 7% of the variance inthe case of the 4WD car and 4% for the ATV).
As a consequence, the regression models predict the vehicle speedaccording to the studied factors and covariates reported in Table 5.
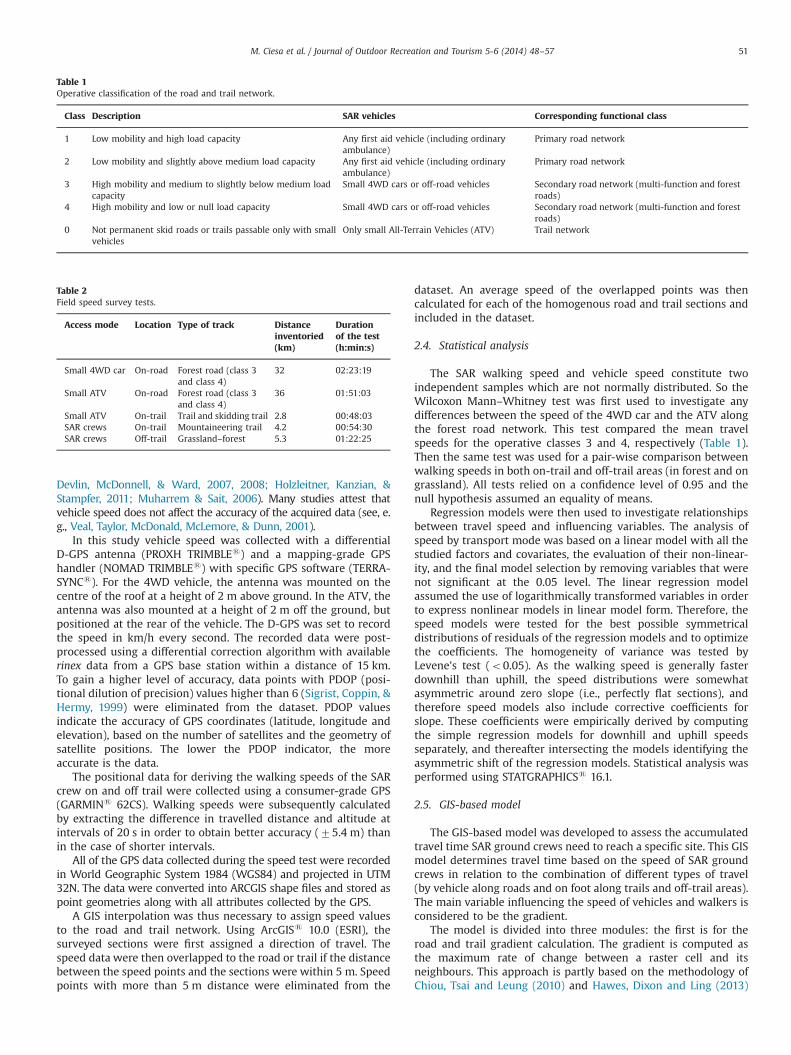
Fig. 2 depicts the results of the vehicle speed models graphicallyas a function of gradient for roads and trails, respectively.This chart clearly highlights the strong influence of gradient onvehicle speeds. On roads where the surface is starting to degrade,the small 4WD car reaches its maximum speed (15.1 km/h) with aroad gradient of 2.5%, while for the small ATV the road gradient thatallows maximum speed (23.1 km/h) is approximately 0%. On trailswith particularly irregular surfaces, the ATV reaches its maximumspeed (17.8 km/h) at a gradient of around 1.5%.
3.2. Walking speed
A summary of the observations of SAR walking speeds ispresented in Table 6.
The Wilcoxon Mann–Whitney test highlighted a significantdifference (Mann–Whitney U¼18,103,937.0; po0.001) for the firstcomparison between the on-trail and off-trail conditions with ahigher mean speed (4.9 km/h) on-trail. The second comparisontest highlighted a significant difference between the speed inforest and on grassland (p¼0.010) at a confidence level of 95%.
In the case of SAR crew speed in off-trail conditions, the resultsfrom the covariance analysis demonstrate that the path gradient isthe major effect, explaining 76% of the variance, while land covershows a small but significant effect of approximately 2% of thevariance. The resulting linear models predicting the SAR crewwalking speed are summarized in Table 7.
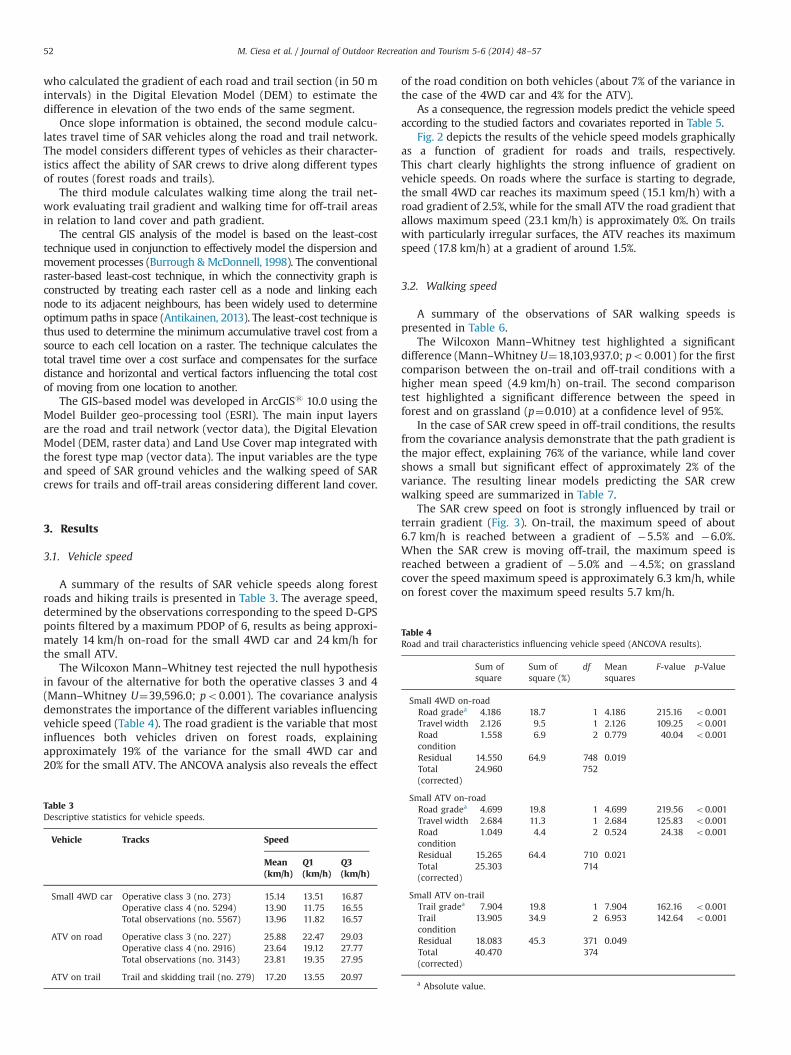
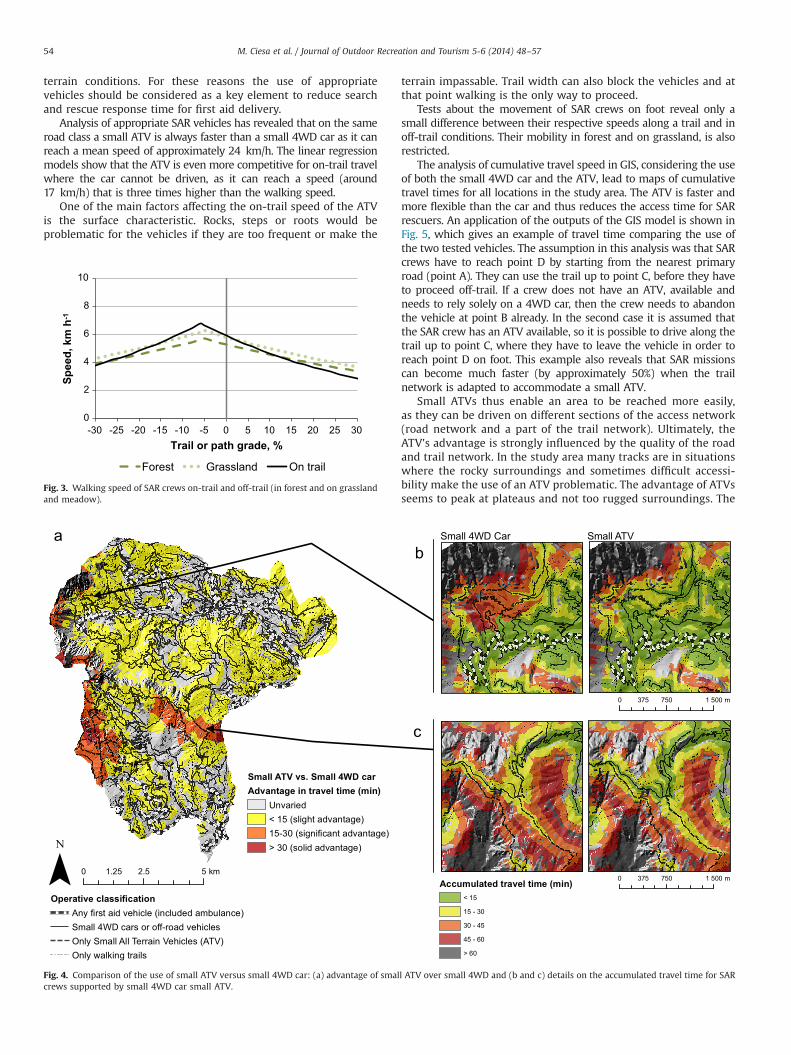
The SAR crew speed on foot is strongly influenced by trail orterrain gradient (Fig. 3). On-trail, the maximum speed of about6.7 km/h is reached between a gradient of �5.5% and �6.0%.When the SAR crew is moving off-trail, the maximum speed isreached between a gradient of �5.0% and �4.5%; on grasslandcover the speed maximum speed is approximately 6.3 km/h, whileon forest cover the maximum speed results 5.7 km/h.
Table 3Descriptive statistics for vehicle speeds.
Vehicle Tracks Speed
Mean(km/h)
Q1(km/h)
Q3(km/h)
Small 4WD car Operative class 3 (no. 273) 15.14 13.51 16.87Operative class 4 (no. 5294) 13.90 11.75 16.55Total observations (no. 5567) 13.96 11.82 16.57
ATV on road Operative class 3 (no. 227) 25.88 22.47 29.03Operative class 4 (no. 2916) 23.64 19.12 27.77Total observations (no. 3143) 23.81 19.35 27.95
ATV on trail Trail and skidding trail (no. 279) 17.20 13.55 20.97
Table 4Road and trail characteristics influencing vehicle speed (ANCOVA results).
Sum ofsquare
Sum ofsquare (%)
df Meansquares
F-value p-Value
Small 4WD on-roadRoad gradea 4.186 18.7 1 4.186 215.16 o0.001Travel width 2.126 9.5 1 2.126 109.25 o0.001Roadcondition
1.558 6.9 2 0.779 40.04 o0.001
Residual 14.550 64.9 748 0.019Total(corrected)
24.960 752
Small ATV on-roadRoad gradea 4.699 19.8 1 4.699 219.56 o0.001Travel width 2.684 11.3 1 2.684 125.83 o0.001Roadcondition
1.049 4.4 2 0.524 24.38 o0.001
Residual 15.265 64.4 710 0.021Total(corrected)
25.303 714
Small ATV on-trailTrail gradea 7.904 19.8 1 7.904 162.16 o0.001Trailcondition
13.905 34.9 2 6.953 142.64 o0.001
Residual 18.083 45.3 371 0.049Total(corrected)
40.470 374
a Absolute value.
M. Ciesa et al. / Journal of Outdoor Recreation and Tourism 5-6 (2014) 48–5752
3.3. Application of the GIS-based model
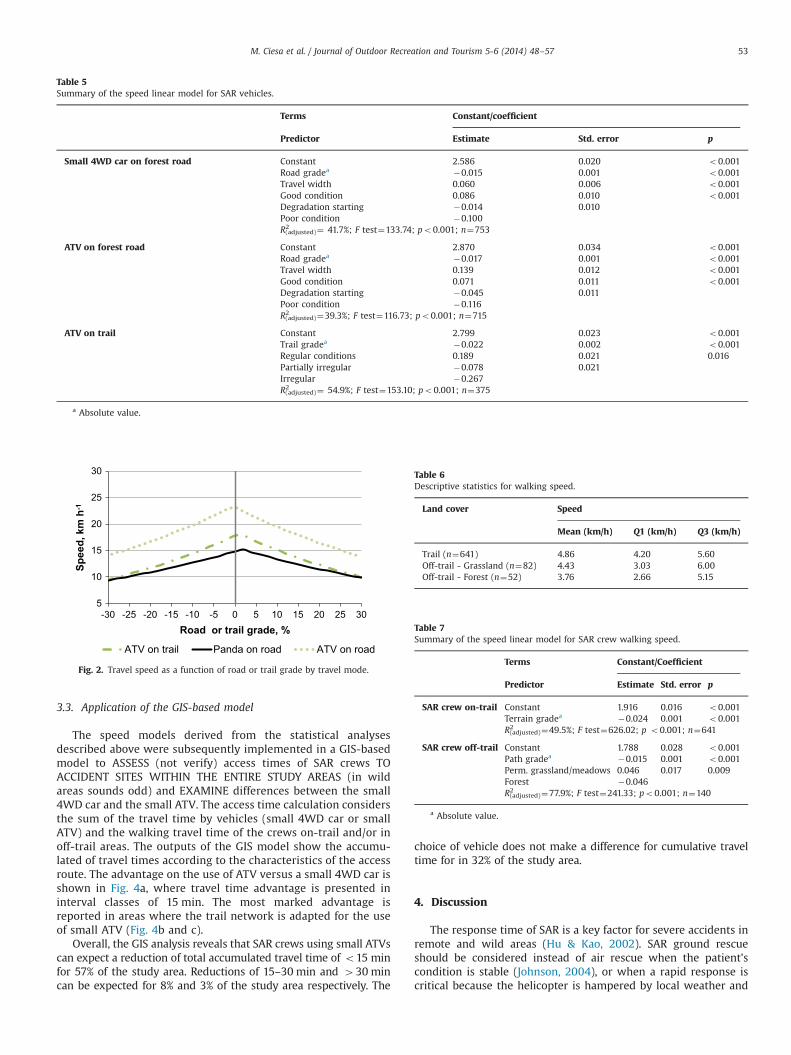
The speed models derived from the statistical analysesdescribed above were subsequently implemented in a GIS-basedmodel to ASSESS (not verify) access times of SAR crews TOACCIDENT SITES WITHIN THE ENTIRE STUDY AREAS (in wildareas sounds odd) and EXAMINE differences between the small4WD car and the small ATV. The access time calculation considersthe sum of the travel time by vehicles (small 4WD car or smallATV) and the walking travel time of the crews on-trail and/or inoff-trail areas. The outputs of the GIS model show the accumu-lated of travel times according to the characteristics of the accessroute. The advantage on the use of ATV versus a small 4WD car isshown in Fig. 4a, where travel time advantage is presented ininterval classes of 15 min. The most marked advantage isreported in areas where the trail network is adapted for the useof small ATV (Fig. 4b and c).
Overall, the GIS analysis reveals that SAR crews using small ATVscan expect a reduction of total accumulated travel time of o15 minfor 57% of the study area. Reductions of 15–30 min and 430 mincan be expected for 8% and 3% of the study area respectively. The
choice of vehicle does not make a difference for cumulative traveltime for in 32% of the study area.
4. Discussion
The response time of SAR is a key factor for severe accidents inremote and wild areas (Hu & Kao, 2002). SAR ground rescueshould be considered instead of air rescue when the patient'scondition is stable (Johnson, 2004), or when a rapid response iscritical because the helicopter is hampered by local weather and
Table 5Summary of the speed linear model for SAR vehicles.
Terms Constant/coefficient
Predictor Estimate Std. error p
Small 4WD car on forest road Constant 2.586 0.020 o0.001Road gradea �0.015 0.001 o0.001Travel width 0.060 0.006 o0.001Good condition 0.086 0.010 o0.001Degradation starting �0.014 0.010Poor condition �0.100R2(adjusted)¼ 41.7%; F test¼133.74; po0.001; n¼753
ATV on forest road Constant 2.870 0.034 o0.001Road gradea �0.017 0.001 o0.001Travel width 0.139 0.012 o0.001Good condition 0.071 0.011 o0.001Degradation starting �0.045 0.011Poor condition �0.116R2(adjusted)¼39.3%; F test¼116.73; po0.001; n¼715
ATV on trail Constant 2.799 0.023 o0.001Trail gradea �0.022 0.002 o0.001Regular conditions 0.189 0.021 0.016Partially irregular �0.078 0.021Irregular �0.267R2(adjusted)¼ 54.9%; F test¼153.10; po0.001; n¼375
a Absolute value.
5
10
15
20
25
30
-30 -25 -20 -15 -10 -5 0 5 10 15 20 25 30
Spee
d, k
m h
-1
Road or trail grade, %
ATV on trail Panda on road ATV on road
Fig. 2. Travel speed as a function of road or trail grade by travel mode.
Table 6Descriptive statistics for walking speed.
Land cover Speed
Mean (km/h) Q1 (km/h) Q3 (km/h)
Trail (n¼641) 4.86 4.20 5.60Off-trail - Grassland (n¼82) 4.43 3.03 6.00Off-trail - Forest (n¼52) 3.76 2.66 5.15
Table 7Summary of the speed linear model for SAR crew walking speed.
Terms Constant/Coefficient
Predictor Estimate Std. error p
SAR crew on-trail Constant 1.916 0.016 o0.001Terrain gradea �0.024 0.001 o0.001R2(adjusted)¼49.5%; F test¼626.02; p o0.001; n¼641
SAR crew off-trail Constant 1.788 0.028 o0.001Path gradea �0.015 0.001 o0.001Perm. grassland/meadows 0.046 0.017 0.009Forest �0.046R2(adjusted)¼77.9%; F test¼241.33; po0.001; n¼140
a Absolute value.
M. Ciesa et al. / Journal of Outdoor Recreation and Tourism 5-6 (2014) 48–57 53
terrain conditions. For these reasons the use of appropriatevehicles should be considered as a key element to reduce searchand rescue response time for first aid delivery.
Analysis of appropriate SAR vehicles has revealed that on the sameroad class a small ATV is always faster than a small 4WD car as it canreach a mean speed of approximately 24 km/h. The linear regressionmodels show that the ATV is even more competitive for on-trail travelwhere the car cannot be driven, as it can reach a speed (around17 km/h) that is three times higher than the walking speed.
One of the main factors affecting the on-trail speed of the ATVis the surface characteristic. Rocks, steps or roots would beproblematic for the vehicles if they are too frequent or make the
terrain impassable. Trail width can also block the vehicles and atthat point walking is the only way to proceed.
Tests about the movement of SAR crews on foot reveal only asmall difference between their respective speeds along a trail and inoff-trail conditions. Their mobility in forest and on grassland, is alsorestricted.
The analysis of cumulative travel speed in GIS, considering the useof both the small 4WD car and the ATV, lead to maps of cumulativetravel times for all locations in the study area. The ATV is faster andmore flexible than the car and thus reduces the access time for SARrescuers. An application of the outputs of the GIS model is shown inFig. 5, which gives an example of travel time comparing the use ofthe two tested vehicles. The assumption in this analysis was that SARcrews have to reach point D by starting from the nearest primaryroad (point A). They can use the trail up to point C, before they haveto proceed off-trail. If a crew does not have an ATV, available andneeds to rely solely on a 4WD car, then the crew needs to abandonthe vehicle at point B already. In the second case it is assumed thatthe SAR crew has an ATV available, so it is possible to drive along thetrail up to point C, where they have to leave the vehicle in order toreach point D on foot. This example also reveals that SAR missionscan become much faster (by approximately 50%) when the trailnetwork is adapted to accommodate a small ATV.
Small ATVs thus enable an area to be reached more easily,as they can be driven on different sections of the access network(road network and a part of the trail network). Ultimately, theATV's advantage is strongly influenced by the quality of the roadand trail network. In the study area many tracks are in situationswhere the rocky surroundings and sometimes difficult accessi-bility make the use of an ATV problematic. The advantage of ATVsseems to peak at plateaus and not too rugged surroundings. The
Operative classificationAny first aid vehicle (included ambulance)Small 4WD cars or off-road vehiclesOnly Small All Terrain Vehicles (ATV)Only walking trails
0 2.5 51.25 km
Small 4WD Car Small ATV
0 750 1 500375 m
0 750 1 500375 m
Accumulated travel time (min)< 15
15 - 30
30 - 45
45 - 60
> 60
Small ATV vs. Small 4WD carAdvantage in travel time (min)
Unvaried< 15 (slight advantage)15-30 (significant advantage)> 30 (solid advantage)
Fig. 4. Comparison of the use of small ATV versus small 4WD car: (a) advantage of small ATV over small 4WD and (b and c) details on the accumulated travel time for SARcrews supported by small 4WD car small ATV.
0
2
4
6
8
10
-30 -25 -20 -15 -10 -5 0 5 10 15 20 25 30
Spee
d, k
m h
-1
Trail or path grade, %
Forest Grassland On trail
Fig. 3. Walking speed of SAR crews on-trail and off-trail (in forest and on grasslandand meadow).
M. Ciesa et al. / Journal of Outdoor Recreation and Tourism 5-6 (2014) 48–5754

use of a small ATV for SAR missions, in particular for searchactivities, should be adequately evaluated for each rescue areaindependently, and the above GIS analysis seems to be a usefulapproach. The ATV simplifies the logistics and speed of the rescueteams, as it can be used on a part of the network that wouldotherwise have to be covered on foot. Eventually, adapting theaccess network for this type of vehicle could be considered, asmaintenance and environmental costs to making routes suitablefor ATV are much lower than they are for proper road construc-tion. However, one should also be cognisant of the fact that theuse of these vehicles is not appropriate for every type of SARmission. An ATV is very useful for providing first aid, or whensearching for missing people, but the transportation of seriouslyinjured people is more challenging then.
All critical points in planning and performing the SAR interventionmust be evaluated before embarking on a mission. Such an evaluationshould consider the safety of the SAR ground crew, personnel
availability, the perceived length of the rescue, the condition andlocation of the injured party and the appropriateness given the victimscondition to perform a safe rescue (Johnson, 2004). Above all, the useof an ATV itself constitutes a high risk for accidents when on trails andevenmore so in off-road conditions (Denning, Jennissen, Harland, Ellis,& Buresh, 2012). Therefore, all the safety measures should be carefullyevaluated in the context of each other.
5. Conclusion
The growing popularity of outdoor recreation activities inforest and mountain areas has led to an increased number ofaccidents, and the number of rescues has also increased steadily.While helicopters play an important role in emergency rescue,ground-based SAR methods are still fundamental. Therefore, thisstudy undertook a systematic analysis of the effectiveness of
0 500 1 000250 m
Operative classification of road and trail neworkAny first aid vehicle (included ambulance)Small 4WD cars or off-road vehiclesOnly Small All Terrain Vehicles (ATV)Only walking trails
Accumulated travel time (min)< 1515-3030-4545-60> 60
Point D: Arrival pointAccumulated travel time: 36 minutes
Point C: SAR crew stops to walk on-trail andstarts to walk off-trailAccumulated travel time: 20 minutes
Point B: SAR crew leaves the small 4WD car andstarts to walk on-trailAccumulated travel time: 1.5 minutes
Point A: Starting point of SAR crew supported by a small 4WDcar on-road
SAR crew operating with small 4WD car
SAR crew operating with small ATV
Point D: Arrival pointAccumulated travel time: 19 minutes
Point C: SAR crew leaves the small ATV and starts waliking off-trailAccumulated travel time: 3 minutes
Point B: SAR crew continues to drive the small ATV on-trail(adapted to be traversed by the small vehicle)Accumulated travel time: 1.2 minutes
Point A: Starting point of SAR crew supported by a small ATV on-road
Fig. 5. Comparing the accumulated travel time for (a) using SAR crews supported by small 4WD car and (b) small ATV.
M. Ciesa et al. / Journal of Outdoor Recreation and Tourism 5-6 (2014) 48–57 55

various modes of transportation for SAR crews, which in turndepend on terrain characteristics of the access network (rural andforest roads and trails). Our work culminated in the developmentof a specific GIS model for analysing various rescue scenarios withdifferent vehicles, and we evaluated how vehicle types effect theSAR response.
An appropriate GIS model, predicting the speed of the SARcrews along the access network can be a useful tool to supportplanning and decision making for SAR missions at both theoperative and the strategic levels. The GIS model developed inthis study can thus support decisions about improving the trailand road network, especially in an area with a high concentra-tion of outdoor recreation activities and a higher risk ofaccidents.
The results of this work thus represent an important tool toevaluate the efficiency of different specific SAR ground operations.The application is recommended especially in mountainous areaswhere the access network has a high variability of road and trailstandards and where the terrain is often rough and problematicfor SAR ground crews.
Among the various modes of transportation, the clear advan-tage of the small ATV (about þ70% in terms of average speedalong the forest road network) especially in first aid and searchoperations is its speed (about 15 km/h) for transporting the SARcrew along the trail network with a carriage width of 1.5 m andpartially rough surface with 25–30 cm as maximum obstacleheight. The main contributions of this study are that it (1) pro-vides an actual experimental evaluation of various travel modesas a function of terrain characteristics in mountainous environ-ments, and (2) uses this information for a spatially explicit GISanalysis of access in terms of reachability for an entire rescuearea. In terms of applications, this tool can also predict theimprovement in rescue times if specific road sections areupgraded.
Acknowledgements
The authors wish to thank the Recoaro-Valdagno MountainRescue Service for the data provided and Marco Pellegrini for hissupport in the walking speed measurement.
References
Antikainen, H. (2013). Comparison of different strategies for determining raster-based least-cost paths with a minimum amount of distortion. Transactions inGIS, 17, 96–108.
Beedie, P., & Hudson, S. (2003). Emergence of mountain-based adventure tourism.Annals of Tourism Research, 30, 625–643.
Boore, S. M., & Bock, D. (2013). Ten years of search and rescue in Yosemite NationalPark: Examining the past for future prevention. Wilderness & EnvironmentalMedicine, 24, 2–7.
Brandley, S. (2011). August marks deadly period in Swiss Alps. Swissinfo.ch.Retrieved from ⟨http://www.swissinfo.ch/eng/swiss_news/August_marks_deadly_period_in_Swiss_Alps.html?cid=31055384⟩.
Breman, P., Baur, B., Bürger-Arndt, R., Hegetschweiler, T., Hunziker, M., Picard, O.,et al. (2010). Central region. In: U. Pröbstl, V. Wirth, B. H. M. Elands, & S. Bell(Eds.), Management of recreation and nature based tourism in European forests(pp. 73–95). Berlin/Heidelberg: Springer.
Burrough, P. A., & McDonnell, R. A. (1998). Principles of geographical informationsystems (p. 334) New York: Oxford University Press Inc.
Chiou, C. R., Tsai, W. L., & Leung, Y. F. (2010). A GIS-dynamic segmentation approachto planning travel routes on forest trail networks in Central Taiwan. Landscapeand Urban Planning, 97, 221–228.
Denning, G. M., Jennissen, C. A., Harland, K. K., Ellis, D. G., & Buresh, C. T. (2012). Off-highway vehicle parks: Combining environment, knowledge, and enforcementfor all-terrain vehicle injury prevention. Accident Analysis & Prevention, 52,64–70.
Devlin, G. J., & McDonnell, K. P. (2009). Performance accuracy of real-time GPS assettracking systems for timber haulage trucks travelling on both internal forestroad and public road networks. International Journal of Forest Engineering, 20(1),45–49.
Devlin, G. J., McDonnell, K. P., & Ward, S. (2008). Timber haulage routing inIreland: An analysis using GIS and GPS. Journal of Transport Geography, 16(1),63–72.
Devlin, G. J., McDonnell, K. P., & Ward, S. (2007). Performance accuracy of low-costdynamic non-differential GPS on articulated trucks. Applied Engineering inAgriculture, 23(3), 273–279.
Doherty, P., Guo, Q., & Alvarez, O. (2012). Expert versus machine: A comparison oftwo suitability models for emergency helicopter landing areas in YosemiteNational Park. The Professional Geographer, 20(10), 1–16.
Farrell, E. P., Führer, E., Ryan, D., Andersson, F., Hüttl, R., & Piussi, P. (2000).European forest ecosystems: Building the future on the legacy of the past.Forest Ecology and Management, 132, 5–20.
Grissom, C. K., Thomas, F., & James, B. (2006). Medical helicopters in wildernesssearch and rescue operations. Air Medical Journal, 25, 18–25.
Hawes, M., Dixon, G., & Ling, R. (2013). A GIS-based methodology for predictingwalking track stability. Journal of Environmental Management, 115, 295–299.
Heggie, T. W. (2008). Search and rescue in Alaska's national parks. Travel Medicineand Infectious Disease, 6, 355–361.
Heggie, T. W., & Heggie, T. M. (2009). Search and rescue trends associated withrecreational travel in US national parks. Journal of Travel Medicine, 16,23–27.
Holzleitner, F., Kanzian, C., & Stampfer, K. (2011). Analyzing time and fuelconsumption in road transport of round wood with an onboard fleet manager.European Journal of Forest Research, 130, 293–301.
Hu, S. C., & Kao, W. F. (2002). Emergency medical services in mountain and remoterecreational areas. Tzu Chi Medical Journal, 14, 301–309.
Hung, E. K., & Townes, D. A. (2007). Search and rescue in Yosemite National Park: A10-year review. Wilderness & Environmental Medicine, 18, 111–116.
Janowsky, D. V., & Becker, G. (2003). Characteristics and needs of different usergroups in the urban forest of Stuttgart. Journal of Natural Conservation, 11,251–259.
Johnson, L. (2004). An introduction to mountain search and rescue. EmergencyMedicine Clinics of North America, 22, 511–524.
Lischke, V., Berner, A., Kopp, K. H., & Mann, A. (2012). Mountain rescue services bythe German red cross. Organization and technical rescue principles. Notfall undRettungsmedizin, 15, 234–240.
Lischke, V., Byhahn, C., Westphal, K., & Kessler, P. (2001). Mountaineering accidentsin the European Alps: Have the numbers increased in recent years? Wildernessand Environmental Medicine, 12(2), 74–80.
Muhar, A., Schauppenlehner, T., Brandenburg, C., & Arnberger, A. (2007). Alpinesummer tourism: The mountaineers' perspective and consequences for tourismstrategies in Austria. Forest Snow and Landscape Research, 81, 7–17.
Muharrem, K., & Sait, M. S. (2006). Feasibility of low-cost GPS receivers for groundspeed measurement. Computers and Electronics in Agriculture, 54, 36–43.
Perlik, M., Messerli, P., & Bätzing, W. (2001). Towns in the Alps. Mountain Researchand Development, 21(3), 243–252.
Perrin, O., Terrier, P., Ladetto, Q., Merminod, B., & Schutz, Y. (2000). Improvementof walking speed prediction by accelerometry and altimetry, validated bysatellite positioning. Medical and Biological Engineering and Computing, 38,164–168.
Regione del Veneto (2011). Regional geodatabase on forest road network in themountainous area of Veneto Region. Regione del Veneto: Unità di ProgettoForeste e Parchi.
Sigrist, P., Coppin, P., & Hermy, M. (1999). Impact of forest canopy on quality andaccuracy of GPS measurements. International Journal of Remote Sensing, 20(18),3595–3610.
Terrier, P., Turner, V., & Schutz, Y. (2005). GPS analysis of human locomotion:Further evidence for long-range correlations in stride-to-stride fluctuation ofgait parameters. Human Movement Science, 24, 97–115.
Thiene, M., & Scarpa, R. (2008). Hiking in the Alps: Exploring substitution patternsof hiking destinations. Tourism Economics, 14, 263–282.
Tomazin, I., & Kovacs, T. (2003). Medical considerations in the use of helicopters inmountain rescue. High Altitude Medicine and Biology, 4, 479–483.
Tomé, M. (2005). Multifunctional forest ecosystem management in Europe. EFINews, 13, 10–11.
Veal, M. W., Taylor, S. E., McDonald, T. P., McLemore, D. K., & Dunn, M. R. (2001).Accuracy of tracking forest machines with GPS. Transactions of the ASAE, 44(6),1903–1911.
Witte, T. H., & Wilson, A. M. (2004). Accuracy of non-differential GPS for thedetermination of speed over ground. Journal of Biomechanics, 37, 1891–1898.
Marta Ciesa is graduated in forest and environmentalscience and she is a PhD student at the Department ofLand, Environment, Agriculture and Forestry of theUniversity of Padova. Her main research field is theevaluation of mountain accessibility network for rescuesystems.
M. Ciesa et al. / Journal of Outdoor Recreation and Tourism 5-6 (2014) 48–5756

Stefano Grigolato is researcher at the Department ofLand, Environment, Agriculture and Forestry of theUniversity of Padova. The main research activities dealwith technologies applied to logging and wood trans-port system and on the management of forest opera-tions. He provides thorough theoretical and practicalexperience in the application of GPS and GIS-basedanalysis on forest operation and the development ofSpatial Decision Support System model. He also con-tributes to transport logistics in a multiple land-usecontext. The current main topic concerns the valorisa-tion of the multifunctional role of the forest road andtrails network in mountainous area.
Raffaele Cavalli is a full professor at the Department ofLand, Environment, Agriculture and Forestry of theUniversity of Padova, teaching at MSc and BSc levelsin forest operations and cable logging. He is a coursedirector of the MSc in forest and environmental scienceand of the BSc in forest and environmental technolo-gies at the School of Agricultural Science and Veter-inary Medicine of University of Padova. He is theresponsible of many European, national and regionalresearch projects (funded by EC, national ministries,regional and local administrations). He is a visitingresearcher in UK and visiting professor in Austria,Czech Republic, Germany, Spain. He is a deputy coordi-
nator of IUFRO Research Group 3.06.00 “Forest operations in mountainous condi-tions” and an associate editor of European Journal of Forest Research.
M. Ciesa et al. / Journal of Outdoor Recreation and Tourism 5-6 (2014) 48–57 57




















