
analisis sudut kemudi pada mobil listrik 2 kilowatt (kw) laporan ...
47
i ANALISIS SUDUT KEMUDI PADA MOBIL LISTRIK 2 KILOWATT (KW) LAPORAN TUGAS AKHIR Diajukan Sebagai Salah Satu Syarat Untuk Menyelesaikan Studi Jenjang Program Diploma Tiga Oleh : Nama : Ari Budiargo NIM : 16020075 PROGRAM STUDI DIII TEKNIK MESIN POLITEKNIK HARAPAN BERSAMA TEGAL 2019
-
Upload
khangminh22 -
Category
Documents
-
view
5 -
download
0
Transcript of analisis sudut kemudi pada mobil listrik 2 kilowatt (kw) laporan ...
i
ANALISIS SUDUT KEMUDI PADA MOBIL LISTRIK
2 KILOWATT (KW)
LAPORAN TUGAS AKHIR
Diajukan Sebagai Salah Satu Syarat Untuk Menyelesaikan Studi
Jenjang Program Diploma Tiga
Oleh :
Nama : Ari Budiargo
NIM : 16020075
PROGRAM STUDI DIII TEKNIK MESIN
POLITEKNIK HARAPAN BERSAMA TEGAL
2019
ii
HALAMAN PERSETUJUAN
LAPORAN TUGAS AKHIR
ANALISIS SUDUT KEMUDI PADA MOBIL LISTRIK
2 KILOWATT (KW)
Sebagai Salah Satu Syarat Untuk Memenuhi Mata Kuliah Tugas Akhir
Oleh :
Nama : Ari Budiargo
NIM : 16020075
Tegal, 18 Juli 2019
Pembimbing I
Mukhammad Khumaidi Usman,M.Eng
NIDN : 0608058601
Pembimbing II
Drs.Agus Suprihadi, M.T
NIPY. 07.010.054
Mengetahui,
Ketua Program Studi DIII Teknik Mesin,
Politeknik Harapan Bersama Tegal
Drs.Agus Suprihadi, M.T
NIPY. 07.010.054
iii
HALAMAN PENGESAHAN
LAPORAN TUGAS AKHIR
Nama : Ari budiargo
NIM : 16020075
Program Studi : DIII Teknik Mesin
Jenjang : Diploma Tiga (DIII)
Dinyatakan LULUS Setelah Dipertahankan Di Depan Tim Penguji Tugas Akhir
Program Studi DIII Teknik MesinPoliteknik Harapan Bersama Tegal.
Tegal, 14 Agustus 2019
1. Penguji I Tanda Tangan
Mukhamad Khumaidi Usman, M.Eng
NIDN. 0608058601
2. Penguji II Tanda Tangan
Andre Budhi Hendrawan. S.T
NIDN. 9906977561
3. Penguji III Tanda Tangan
Firman Lukman Sanjaya, S.T
NIDN. 9906977251
Mengetahui,
Ketua Program Studi DIII TeknikMesin,
PoliteknikHarapanBersamaTegal
Drs.Agus Suprihadi, M.T
NIPY. 07.010.054
iv
HALAMAN PERNYATAAN
Yang bertanda tangan di bawah ini:
Nama : Ari Budiargo
NIM : 15020078
Adalah mahasiswa program studi DIII teknik mesin Politeknik Harapan Bersama,
Dengan ini saya menyatakan bahwa laporan tugas akhir yang berjudul “ Analisis sudut
kemudi pada mobil listrik 2 kilowatt (KW)”. Merupakan hasil pemikiran sendiri secara
orisinel dan saya susun secara mandiri dengan tidak melanggar kode etik hak cipta.
Laporan tugas akhir ini juga bukan merupakan karya yang pernah di ajukan untuk
memperoleh gelar akademik tertentu suatu perguruan tinggi, dan sepanjang pengetahuan
saya juga tidak terdapat karya atau pendapat yang pernah di tulis atau di terbitkan oleh
orang lain, kecuali yang secara tertulis di acu dalam naskah ini dan disebutkan dalam
daftar pustaka.
Apabila di kemudian hari ternyata laporan tugas akhir ini terbukti melanggar kode
etik karya cipta atau merupakan karya yang di kategorikan mengandung unsur
plagiatisme, maka saya bersedia untuk melakukan penelitian baru dan menyusun laporan
sebagai laporan tugas akhir sesuai ketentuan yang berlaku.
Demikian pernyatan ini saya buat dengan sebenarnya dan sesungguhnya.
Tegal, 1 Agustus 2019
Yang membuat pernyataan
(Ari Budiargo)

v
ABSTRAK
ANALISIS SUDUT KEMUDI PADA MOBIL LISTRIK
2 KILOWATT (KW)
Disusun Oleh :
ARI BUDIARGO
NIM : 1620075
Pada sebuah kendaran Sistem kemudi (steering) termasuk salah satu komponen yang
sangat penting dalam mobil lisrik. Karena sistem kemudi (steering) berfungsi untuk
menggerakan roda depan untuk berbelok ke kanan dan ke kiri. dalam menganalisis sudut
kemudi pada mobil listik 2 kilowatt (kw). Dalam menganalisi kemudi mobil listrik 2
kilowatt (kw) menggunakan kemudi tipe rack end, panjang rack 300 mm, panjang tie rod
100 mm dan .sudut kemudi yang di analisis yaitu 300, 35
0, 40
0 metode pengujian hasil
dari analisi sudut kemudi mobil listrik 2 kilowatt (kw) dengan metode Mengendarai
mobil listrik dengan pola lingkaran, yakni dengan memutar roda kemudi ke kanan atau
sebaliknya sesuai yang kita inginkan , dari sudut roda 300
di dapat hasil diamter radius
dalam kanan 12,63 m, kiri 16,53 m, untuk diameter radius luarnya kanan 13,4 m, kiri
17,30 m dan sudut radius dalam kanan di peroleh 780 , kiri 80
0 , sudut radius luarnya
untuk kanan 610
, untuk kiri 650 , sudut roda 35
0 di dapat diamter radius dalam kanan
11,53 m, kiri 15,63 m, untuk diameter radius luarnya kanan 12,30 m, kiri 16,40 m dan
sudut radius dalam kanan di peroleh 690 , kiri 73
0 , sudut radius luarnya untuk kanan 56
0 ,
untuk kiri 580 dan sudut roda 40
0 di dapat diamter radius dalam kanan 11,13 m, kiri 14,43
m, untuk diameter radius luarnya kanan 11,90 m m, kiri 15,20 m dan sudut radius dalam
kanan di peroleh 500 , kiri 68
0 , sudut radius luarnya untuk kanan 43
0 , untuk kiri 46
0
Kata Kunci : sistem kemudi, sudut kemudi , mobil listrik dan sudut radius
vi
ABSTRACT
STEERING ANGLE ANALYSIS IN ELECTRIC CAR
2 KILOWATT (KW)
Arranged by :
ARI BUDIARGO
NIM: 1620075
In a vehicle steering system (steering) is one of the most important components in an
electric car. Because the steering system (steering) functions to move the front wheels to
turn right and left. in analyzing the steering angle of an electric car 2 kilowatt (kw)
electric car. In analyzing the electric car steering 2 kilowatts (kw) using the rack end type
steering, rack length 300 mm, tie rod length 100 mm and steering angle analyzed 300, 35
0,
400 methods of testing the results of the electric car steering angle analysis of 2 kilowatts
(kw) with the method of driving an electric car with a circular pattern, namely by turning
the steering wheel to the right or vice versa as we want, from a wheel angle of 300 we can
get a diameter of the right diameter of 12.63 m, left 16.53 m, for diameter the right outer
radius is 13.4 m, the left is 17.30 m and the right inner radius is 780, left is 80
0, the outer
radius for the right is 610, for the left 65
0. the wheel angle 35
0 at the right diameter is
11.53 m, left 15.63 m, for the outer diameter of the right radius 12.30 m, left 16.40 m and
the angle of the inner radius obtained right 690, left 73
0, the outer radius angle for the
right 560, for the left 58
0 and the wheel angle 40
0 at can be diamter inner right radius
11.13 m, left 14.43 m, for outer diameter of the right radius 11.90 m m, left 15.20 m and
the angle of the inner radius of the right is obtained 500, left 68
0, angle of the outer radius
for the right 430, for the left 46
0
Keywords: steering system, steering angle, electric car and radius angle
vii
HALAMAN MOTTO DAN PERSEMBAHAN
MOTO
1. Contoh yang baik adalah nasihat yangbaik.
2. Apapun yang ingin kita capai, lakukan dengan usaha dan doa, Tidak ada
perlindungan dan pertolongan bagimu selain Allah SWT, (Qs. At-taubat ayat
116).
3. Tak ada orang yang tidak dapat melakukan sesuatu dan tidak ada orang yang
dapat melakukan segala hal.
4. Kita bukan pemimpi, Tapi kita pewujud mimpi.
PERSEMBAHAN
Dengan mengucap syukur Alhamdulliah Karya ini dipersembahkan Kepada:
1. Kedua orang tuaku yang selama ini memberikan dukungan moral maupun
material.
2. Bapak dan Ibu Dosen DIII Teknik Mesin yang telah membimbing selama
melaksanakan studi kuliah di Politeknik Harapan Bersama Tegal.
3. Dosen pembimbing yang telah membantu dalam pembuatan laporan.
4. Teman-teman Prodi DIII Teknik Mesin angkatan 2017 dan Almamaterku.
viii
KATA PENGANTAR
Puji syukur penuli spanjatkan kehadirat Tuhan Yang Maha Esa yang telah
mengkaruniakan kemampuan pada penulis sehingga dapat menyelesaikan laporan tugas
akhir ini dengan judul “ANALISI SUDUT KEMUDI MOBIL LISTRIK 2 KILOWATT
(2 KW)”.
Keberhasilan dalam menyelesaikan laporan ini juga tidak lepas dari bantuan dan
bimbingan dari pihak yang secara sukarela telah membantu penulis baik moril maupun
material. Oleh karena itu pada kesempatan ini penulis ingin mengucapkan terimakasih
kepada:
1. Bapak Mc.Chambali, B.Eng., M.kom selaku Direktur Politeknik Harapan
Bersama Tegal.
2. Bapak Drs. Agus Suprihadi, M.T selaku Kepala Prodi DIII Teknik Mesin
Politeknik Harapan Bersama Tegal.
3. Bapak Mukhamad Khumaidi Usman, M.Eng selaku pembimbing I laporan
Tugas Akhir dan Bapak Syarifudin, M.T selaku pembimbing II laporan
Tugas Akhir.
4. Bapak dan Ibu Dosen pengampu program studi DIII Teknik Mesin.
5. Ibu dan Bapak tercinta yang telah memberikan doa restu serta dorongan
semangat.
6. Teman-teman seatap seperjuangan yang selalu memberikan dukungan.
7. Dan pihak-pihak yang lain yang telah membantu dalam penyusunan laporan
Tugas Akhir yang tidak bias disebutkan satu per satu.
ix
Menyadari bahwa laporan ini jauh dari sempurna, untuk itu mengharapkan
saran dan kritik yang membngun dari pembaca guna memperbaiki laporan
yang disusun dikemudian hari. Akhir kata penuyusun berharap semoga
laporan ini bermanfaat bagi kita.
Tegal, 1 agustus 2019
Ari Budiargo
x
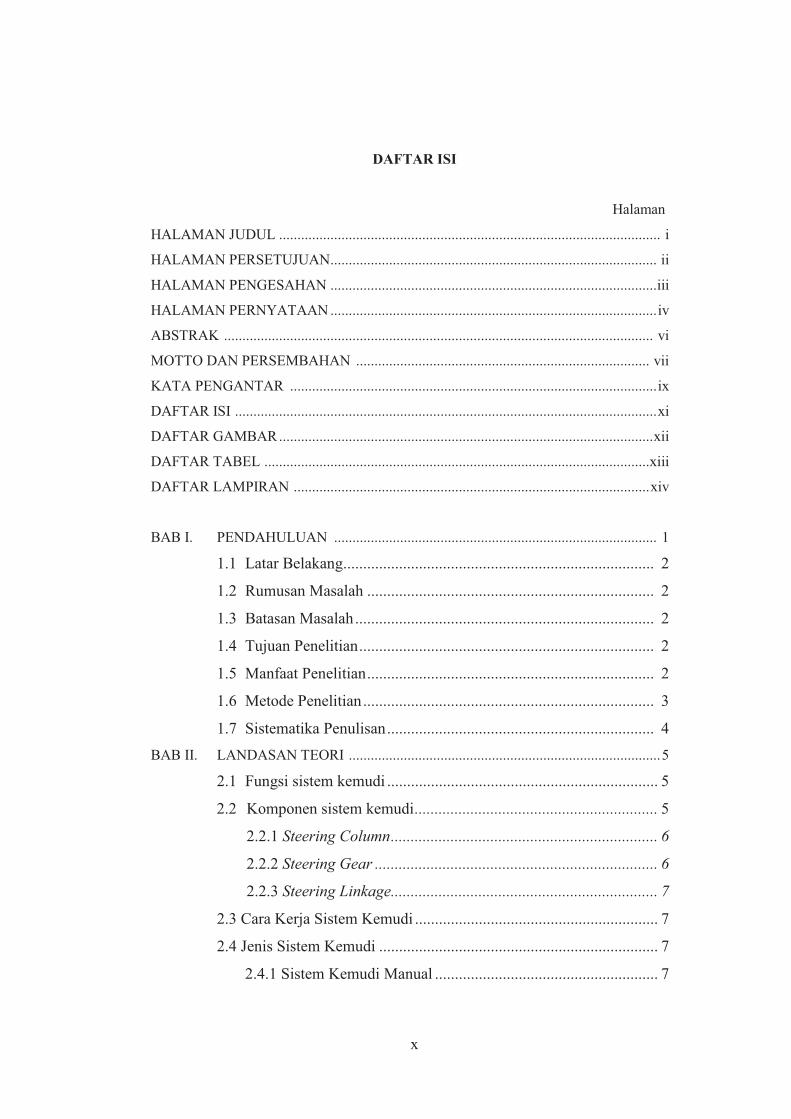
DAFTAR ISI
Halaman
HALAMAN JUDUL ........................................................................................................ i
HALAMAN PERSETUJUAN ......................................................................................... ii
HALAMAN PENGESAHAN ......................................................................................... iii
HALAMAN PERNYATAAN ......................................................................................... iv
ABSTRAK ..................................................................................................................... vi
MOTTO DAN PERSEMBAHAN ................................................................................ vii
KATA PENGANTAR .................................................................................................... ix
DAFTAR ISI ................................................................................................................... xi
DAFTAR GAMBAR ...................................................................................................... xii
DAFTAR TABEL ......................................................................................................... xiii
DAFTAR LAMPIRAN ................................................................................................. xiv
BAB I. PENDAHULUAN ........................................................................................ 1
1.1 Latar Belakang.............................................................................. 2
1.2 Rumusan Masalah ........................................................................ 2
1.3 Batasan Masalah ........................................................................... 2
1.4 Tujuan Penelitian .......................................................................... 2
1.5 Manfaat Penelitian ........................................................................ 2
1.6 Metode Penelitian ......................................................................... 3
1.7 Sistematika Penulisan ................................................................... 4
BAB II. LANDASAN TEORI ..................................................................................... 5
2.1 Fungsi sistem kemudi .................................................................... 5
2.2 Komponen sistem kemudi ............................................................. 5
2.2.1 Steering Column ................................................................... 6
2.2.2 Steering Gear ....................................................................... 6
2.2.3 Steering Linkage................................................................... 7
2.3 Cara Kerja Sistem Kemudi ............................................................. 7
2.4 Jenis Sistem Kemudi ...................................................................... 7
2.4.1 Sistem Kemudi Manual ........................................................ 7
xi
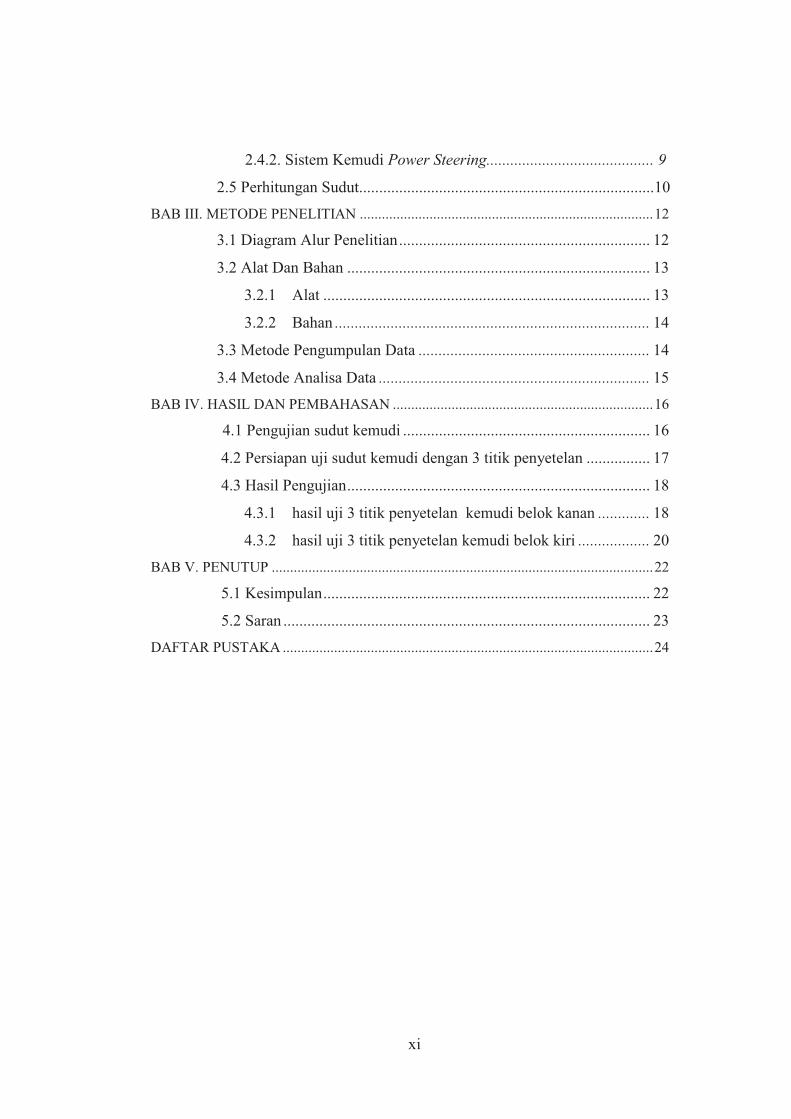
2.4.2. Sistem Kemudi Power Steering.......................................... 9
2.5 Perhitungan Sudut..........................................................................10
BAB III. METODE PENELITIAN ................................................................................ 12
3.1 Diagram Alur Penelitian ............................................................... 12
3.2 Alat Dan Bahan ............................................................................ 13
3.2.1 Alat .................................................................................. 13
3.2.2 Bahan ............................................................................... 14
3.3 Metode Pengumpulan Data .......................................................... 14
3.4 Metode Analisa Data .................................................................... 15
BAB IV. HASIL DAN PEMBAHASAN ....................................................................... 16
4.1 Pengujian sudut kemudi .............................................................. 16
4.2 Persiapan uji sudut kemudi dengan 3 titik penyetelan ................ 17
4.3 Hasil Pengujian ............................................................................ 18
4.3.1 hasil uji 3 titik penyetelan kemudi belok kanan ............. 18
4.3.2 hasil uji 3 titik penyetelan kemudi belok kiri .................. 20
BAB V. PENUTUP ........................................................................................................ 22
5.1 Kesimpulan .................................................................................. 22
5.2 Saran ............................................................................................ 23
DAFTAR PUSTAKA ..................................................................................................... 24

xii
DAFTAR GAMBAR
Gambar Halaman
Gambar 2.1 sistem kemudi ......................................................................................... 5
Gambar 2.2 steering columm ...................................................................................... 6
Gambar 2.3 steering gear..... ...................................................................................... 6
Gambar 2.4 Steering linkage ....................................................................................... 7
Gambar 2.5 Recilculating-ball .................................................................................... 8
Gambar 2.6 Rack and Pinion ...................................................................................... 9
Gambar 2.7 Sistem Kemudi Power Steering .............................................................. 9
Gambar 2.4 sudut dan radius belok ............................................................................. 10
Gambar 3.1 Diagram Alur Penelitian ......................................................................... 12
Gambar 3.2 Meteran ................................................................................................... 13
Gambar 3.3 Penggaris busur ....................................................................................... 13
Gambar 4.1 Pengujian Dengan Membentuk Pola Lingkaran ...................................... 17
Gamabr 4.2 penyetelan sudut kemudi ......................................................................... 17
Gambar 4.3 mengukur diameter radius ...................................................................... 19
Gambar 4.4 mengukur sudut radius ......................................................................... 21
xiii
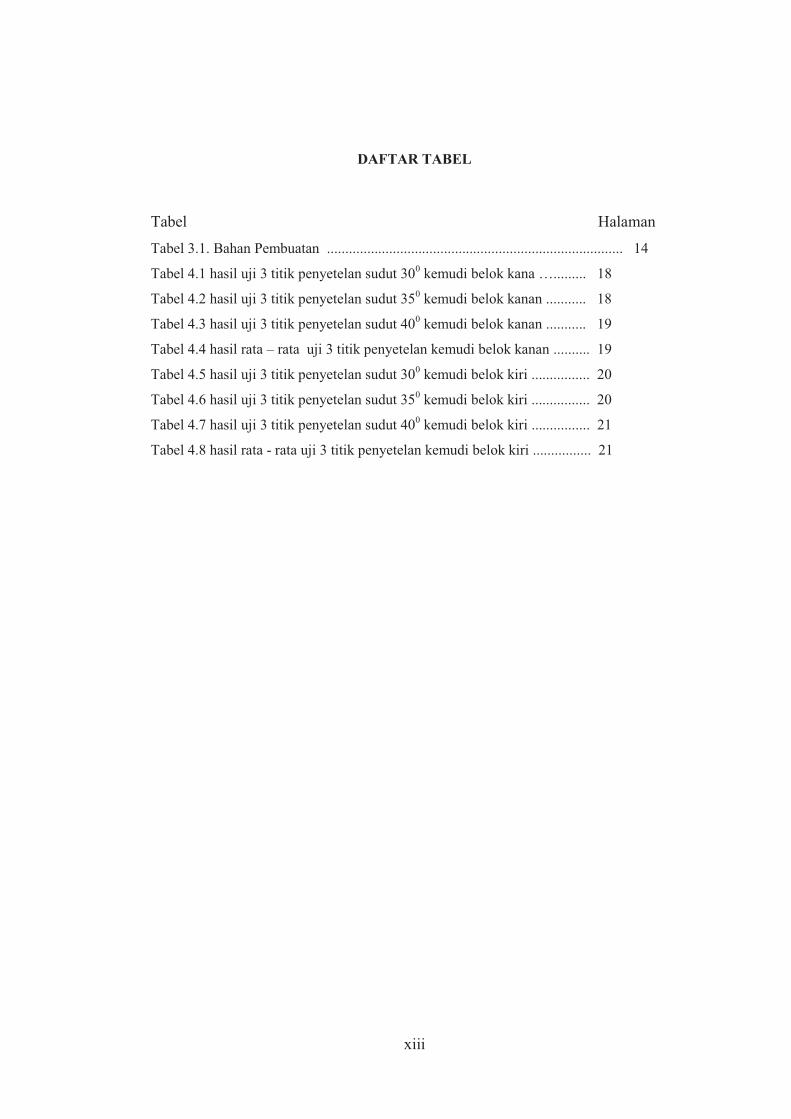
DAFTAR TABEL
Tabel Halaman
Tabel 3.1. Bahan Pembuatan ................................................................................. 14
Tabel 4.1 hasil uji 3 titik penyetelan sudut 300 kemudi belok kana …......... 18
Tabel 4.2 hasil uji 3 titik penyetelan sudut 350 kemudi belok kanan ........... 18
Tabel 4.3 hasil uji 3 titik penyetelan sudut 400 kemudi belok kanan ........... 19
Tabel 4.4 hasil rata – rata uji 3 titik penyetelan kemudi belok kanan .......... 19
Tabel 4.5 hasil uji 3 titik penyetelan sudut 300 kemudi belok kiri ................ 20
Tabel 4.6 hasil uji 3 titik penyetelan sudut 350 kemudi belok kiri ................ 20
Tabel 4.7 hasil uji 3 titik penyetelan sudut 400 kemudi belok kiri ................ 21
Tabel 4.8 hasil rata - rata uji 3 titik penyetelan kemudi belok kiri ................ 21

xiv
DAFTAR LAMPIRAN
Lampiran Halaman
Lampiran 1. Gambar dokumentasi ............................................................. A-1
Lampiran 2. Kesediaan pembimbing ......................................................... A-2
Lampiran 3. Buku bimbingan TA .............................................................. A-3
1
BAB I
PENDAHULUAN
1.1 Latar Belakang
Saat ini pemerintah sedang gencar dalam mengembangkan kendaran listrik
sebagai pengganti transportasi mesin bakar, karena subsidi BBM semakin lama
semakin membengkak. Teknologi kendaraan listrik baterai dipercaya akan dengan
cepat berkembang dan mendominasi sebagai pengganti era transportasi mesin
bakar, karena teknologi kendaraan listrik baterai memiliki beberapa keunggulan
dibandingkan dengan teknologi alternatif lainnya. (Wijaya R.B.dan Benidiktus
T.P., 2015).
Kendaraan listrik adalah salah satu jalan keluar atas masalah polusi tersebut.
Karena kendaraan listrik sumber tenaganya dari baterai atau sering disebut aki,
sehingga kendaraan ini sangat ramah lingkungan atau bisa dibilang “zero
emission”. Hal ini dapat mengurangi kadar CO2 dan sejenisnya di udara sebagai
bahan kimia yang menyebabkan global warming. Sistem penggerak mobil listrik
terdiri dari sistem energi,dan sistem kendali. Sistem energi ini terdiri dari sistem
charging dan tempat penyimpanan energi. Sistem kendali menggunakan saklar
pembatas yang berhubungan dengan pedal pegas dan rem, di mana sistem ini
berfungsi sebagai pengendali dan pengaman yang dapat memutus sistem daya
pada saat pengemudi menginjak pedal rem. Mobil ini beroda 4 dan digerakan
dengan dynamo DC yang bersumber dari aki. (Zainuri, dkk., 2016).
Sistem kemudi (steering) termasuk salah satu komponen yang sangat
penting dalam mobil lisrik. Karena sistem kemudi (steering) berfungsi untuk
menggerakan roda depan untuk berbelok ke kanan dan ke kiri. Sistem kemudi
dibagi menjadi beberapa jenis yaitu manual steering dan power steering. Pada
sistem kemudi manual steering tenaga yang dibutuhkan untuk membelokkan roda
dari lingkar kemudi yang diputar oleh tenaga pengemudi, sedangkan power
steering adalah sistem kemudi yang tenaga geraknya diperoleh dari tenaga
hidrolik atau elektrik yang menggunakan motor penggerak juga. Dari penjelasan
tersebut maka penulis memilih melakukan penelitian dengan mengaplikasikan
2
sistem kemudi manual pada mobil listrik. Ini bermaksud untuk mendapatkan
efesiensi tenaga listrik yang ada pada mobil listrik yang akan dibuat.
(Rusminto,dkk., 2017)
1.2 Rumusan Masalah
Adapun rumusan masalah dalam penyusunan laporan Tugas Akhir (TA) ini
yaitu bagaimana menganalisis sudut kemudi pada mobil listril 2 kw terhadap
radius putar roda yang di hasilkan ?
1.3 Batasan Masalah
Agar penulisan laporan Tugas Akhir (TA) ini lebih terarah dalam hal ini
membatasi permasalahan yang akan di bahas yaitu :
1. Komponen sistem kemudi Mobil Listrik 2 KW
2. Mengetahui rumus sudut kemudi Mobil Listrik 2 KW
3. Mengetahui Lingkar Sudut Kemudi Mobil Listrik 2 KW
4. Pengujian Dilakukan Dengan 3 Titik penyetelan dari 300, 35
0 dan 40
0 pada
Mobil Listrik 2 KW
1.4 Tujuan Penelitian
Tujuan yang diperoleh dari penelitian ini adalah untuk mengetahui sudut
kemudi yang di hasilkan oleh mobil listrik
1.5 Manfaat Penelitian
Manfaat dari penelitian dapat mengetahui sudut kemudi mobil listrik 2 KW
1.6 Metode Penelitian
Adapun jenis metode pengumpulan data yang dilakukan untuk mendukung
proses pengujian ini :
3
1.6.1 Literatur
Pada metode ini penulis mengumpulkan data melalui buku-buku majalah,
jurnal, internet yang relavan dengan penelitian.
1.6.2 Observasi
Pada metode ini menggumpulkan data dengan jalan mengamati dan
menganalisa sudut kemudi pada mobil listril 2 kw
1.6.3. Interview
Pada metode ini penulis melakukan tanya jawab dengan pembimbing dan
bengkel-bengkel pembuat dan perancang mobil listrik 2 Kw
1.6.4. Experimen
Pada metode ini penulis melakukan sebuah percobaan untuk menganalisa
sudut kemudi pada Mobil listrik 2 Kw
1.7 Sistematika Penulisan
Adapun sistematika dalam penyusunan laporan adalah :
BAB I PENDAHULUAN
Dalam bab Pendahuluan, berisikan latar belakang masalah, rumusan
masalah, batasan masalah, tujuan penelitian, manfaat penelitian, dan sistematika
penulisan laporan Tugas Akhir.
BAB II LANDASAN TEORI
Dalam bab Landasan teori berisi tentang dasar-dasar teori yang dibutuhkan
dalam penyusunan Laporan Akhir.
BAB III METODE DAN PENELITIAN
Dalam bab Metode dan Penelitian ini berisikan alur penelitian, alat dan
bahan penelitian, metode pengumpulan data penelitian dan metode analisis data.
BAB IV HASIL DAN PEMBAHASAN
Bab ini menjelaskan proses analisi sistem kemudi dan hasil dari pengujian.

4
BAB V PENUTUP
Dalam bab ini berikan tentang lembaran, simpulan dan saran penyusun.
DAFTAR PUSTAKA
Daftar pustaka menguraikan tentang sumber-sumber dari data yang
dutuhkan pada proses penelitian ini
5
BAB II
LANDASAN TEORI
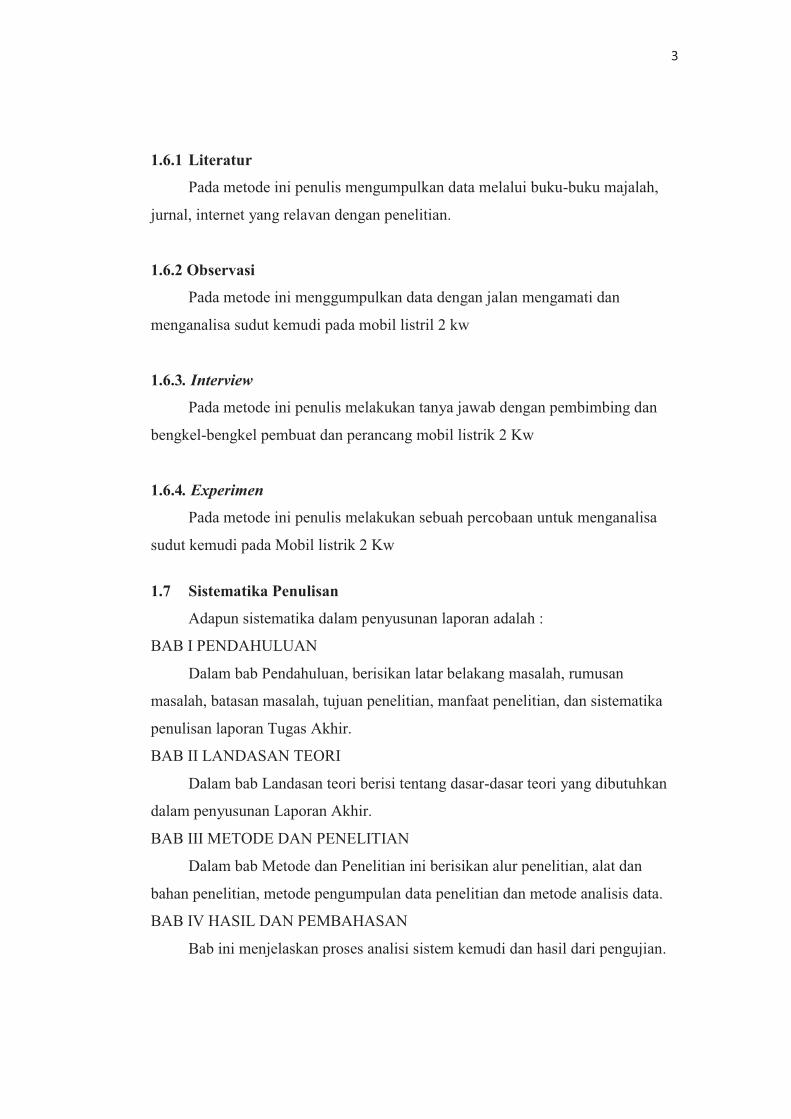
2.1 Fungsi Sistem Kemudi
berfungsi untuk mengatur dan membelokkan roda depan. Sistem kemudi ini
merupakan salah satu sistem yang terdapat pada chasis kendaraan yang berfungsi
untuk merubah arah kendaraan dan laju kendaraan. Perubahan arah ini dilakukan
dengan membelokkan roda-roda depan kendaraan dan menjaga agar posisi tetap
stabil. (Rusminto, dkk, 2017)
Gambar 2.1 sistem kemudi.
(dokumentasi 2019)
2.2. Komponen-Komponen Sistem kemudi
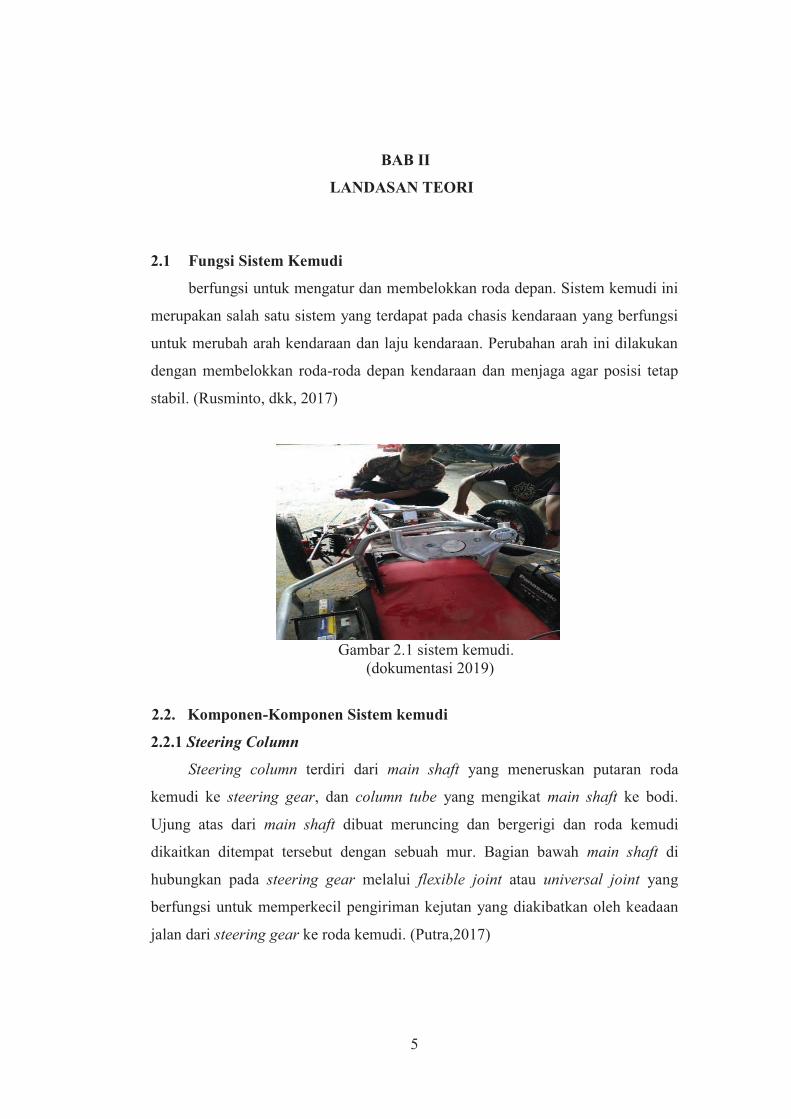
2.2.1 Steering Column
Steering column terdiri dari main shaft yang meneruskan putaran roda
kemudi ke steering gear, dan column tube yang mengikat main shaft ke bodi.
Ujung atas dari main shaft dibuat meruncing dan bergerigi dan roda kemudi
dikaitkan ditempat tersebut dengan sebuah mur. Bagian bawah main shaft di
hubungkan pada steering gear melalui flexible joint atau universal joint yang
berfungsi untuk memperkecil pengiriman kejutan yang diakibatkan oleh keadaan
jalan dari steering gear ke roda kemudi. (Putra,2017)
6
Gambar 2.2 steering columm
(dokumentasi, 2019)
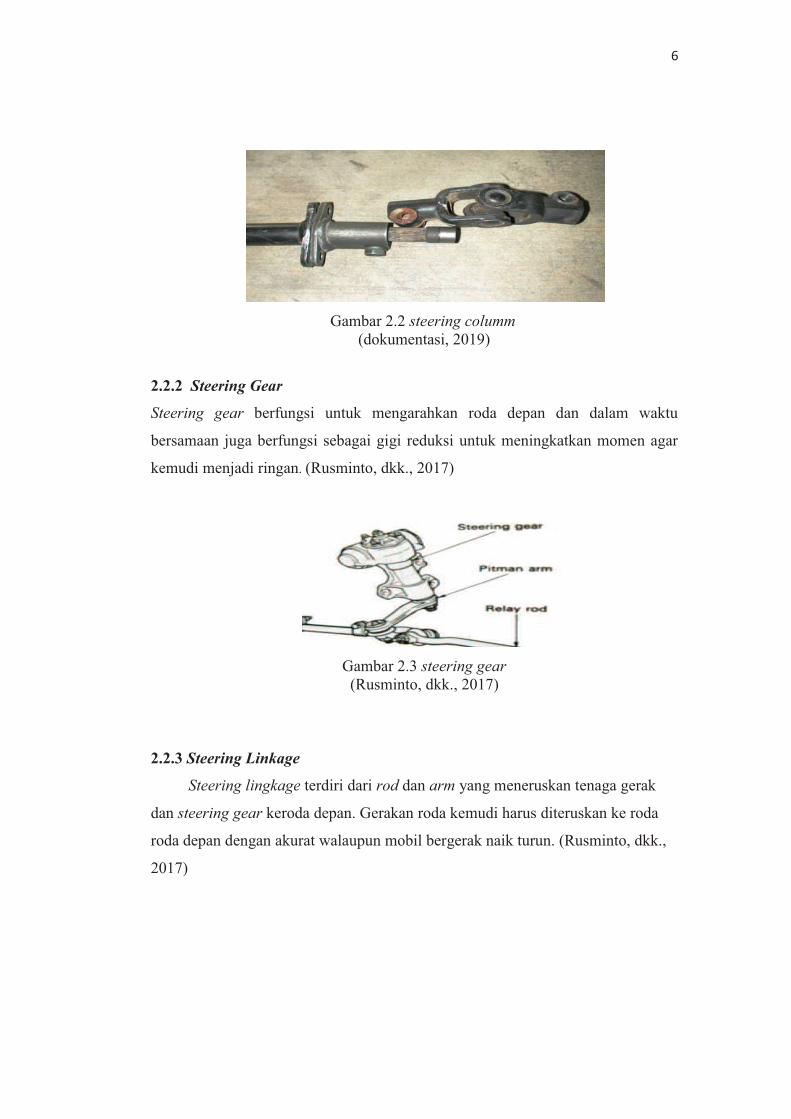
2.2.2 Steering Gear
Steering gear berfungsi untuk mengarahkan roda depan dan dalam waktu
bersamaan juga berfungsi sebagai gigi reduksi untuk meningkatkan momen agar
kemudi menjadi ringan. (Rusminto, dkk., 2017)
Gambar 2.3 steering gear
(Rusminto, dkk., 2017)
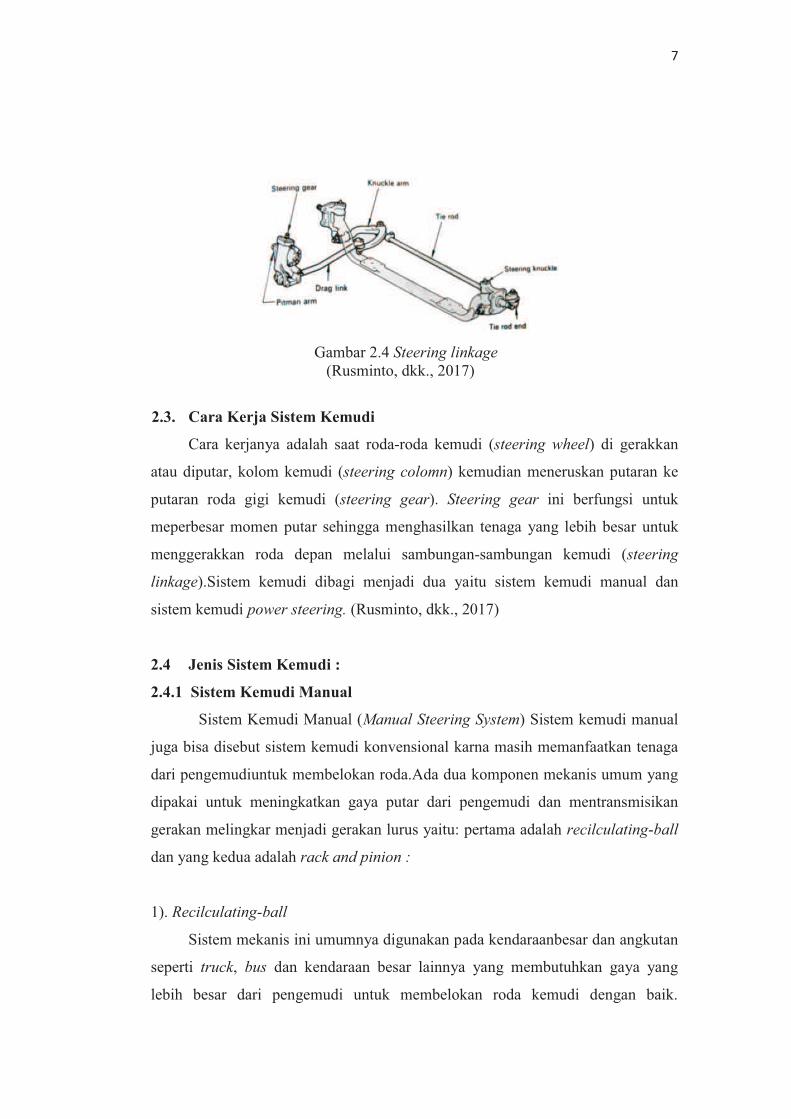
2.2.3 Steering Linkage
Steering lingkage terdiri dari rod dan arm yang meneruskan tenaga gerak
dan steering gear keroda depan. Gerakan roda kemudi harus diteruskan ke roda
roda depan dengan akurat walaupun mobil bergerak naik turun. (Rusminto, dkk.,
2017)
7
Gambar 2.4 Steering linkage
(Rusminto, dkk., 2017)
2.3. Cara Kerja Sistem Kemudi
Cara kerjanya adalah saat roda-roda kemudi (steering wheel) di gerakkan
atau diputar, kolom kemudi (steering colomn) kemudian meneruskan putaran ke
putaran roda gigi kemudi (steering gear). Steering gear ini berfungsi untuk
meperbesar momen putar sehingga menghasilkan tenaga yang lebih besar untuk
menggerakkan roda depan melalui sambungan-sambungan kemudi (steering
linkage).Sistem kemudi dibagi menjadi dua yaitu sistem kemudi manual dan
sistem kemudi power steering. (Rusminto, dkk., 2017)
2.4 Jenis Sistem Kemudi :
2.4.1 Sistem Kemudi Manual
Sistem Kemudi Manual (Manual Steering System) Sistem kemudi manual
juga bisa disebut sistem kemudi konvensional karna masih memanfaatkan tenaga
dari pengemudiuntuk membelokan roda.Ada dua komponen mekanis umum yang
dipakai untuk meningkatkan gaya putar dari pengemudi dan mentransmisikan
gerakan melingkar menjadi gerakan lurus yaitu: pertama adalah recilculating-ball
dan yang kedua adalah rack and pinion :
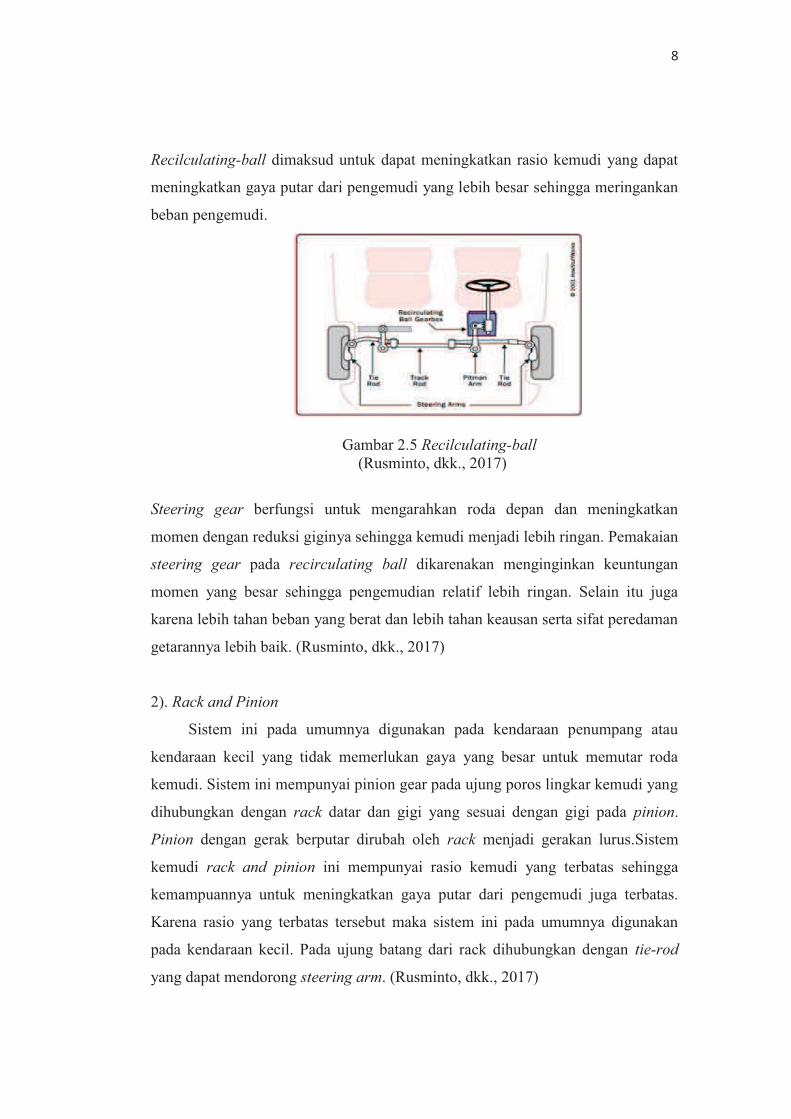
1). Recilculating-ball
Sistem mekanis ini umumnya digunakan pada kendaraanbesar dan angkutan
seperti truck, bus dan kendaraan besar lainnya yang membutuhkan gaya yang
lebih besar dari pengemudi untuk membelokan roda kemudi dengan baik.
8
Recilculating-ball dimaksud untuk dapat meningkatkan rasio kemudi yang dapat
meningkatkan gaya putar dari pengemudi yang lebih besar sehingga meringankan
beban pengemudi.
Gambar 2.5 Recilculating-ball
(Rusminto, dkk., 2017)
Steering gear berfungsi untuk mengarahkan roda depan dan meningkatkan
momen dengan reduksi giginya sehingga kemudi menjadi lebih ringan. Pemakaian
steering gear pada recirculating ball dikarenakan menginginkan keuntungan
momen yang besar sehingga pengemudian relatif lebih ringan. Selain itu juga
karena lebih tahan beban yang berat dan lebih tahan keausan serta sifat peredaman
getarannya lebih baik. (Rusminto, dkk., 2017)
2). Rack and Pinion
Sistem ini pada umumnya digunakan pada kendaraan penumpang atau
kendaraan kecil yang tidak memerlukan gaya yang besar untuk memutar roda
kemudi. Sistem ini mempunyai pinion gear pada ujung poros lingkar kemudi yang
dihubungkan dengan rack datar dan gigi yang sesuai dengan gigi pada pinion.
Pinion dengan gerak berputar dirubah oleh rack menjadi gerakan lurus.Sistem
kemudi rack and pinion ini mempunyai rasio kemudi yang terbatas sehingga
kemampuannya untuk meningkatkan gaya putar dari pengemudi juga terbatas.
Karena rasio yang terbatas tersebut maka sistem ini pada umumnya digunakan
pada kendaraan kecil. Pada ujung batang dari rack dihubungkan dengan tie-rod
yang dapat mendorong steering arm. (Rusminto, dkk., 2017)
9
Gambar 2.6 Rack and Pinion
(dokumentasi., 2019)
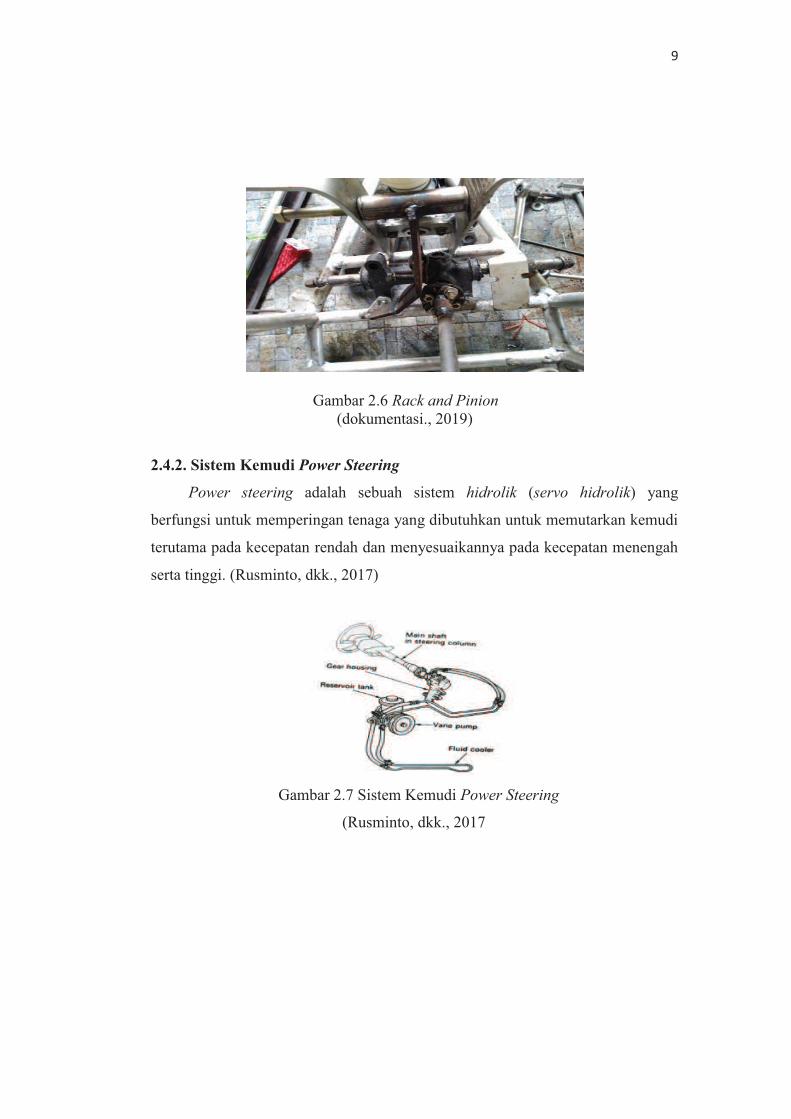
2.4.2. Sistem Kemudi Power Steering
Power steering adalah sebuah sistem hidrolik (servo hidrolik) yang
berfungsi untuk memperingan tenaga yang dibutuhkan untuk memutarkan kemudi
terutama pada kecepatan rendah dan menyesuaikannya pada kecepatan menengah
serta tinggi. (Rusminto, dkk., 2017)
Gambar 2.7 Sistem Kemudi Power Steering
(Rusminto, dkk., 2017
10
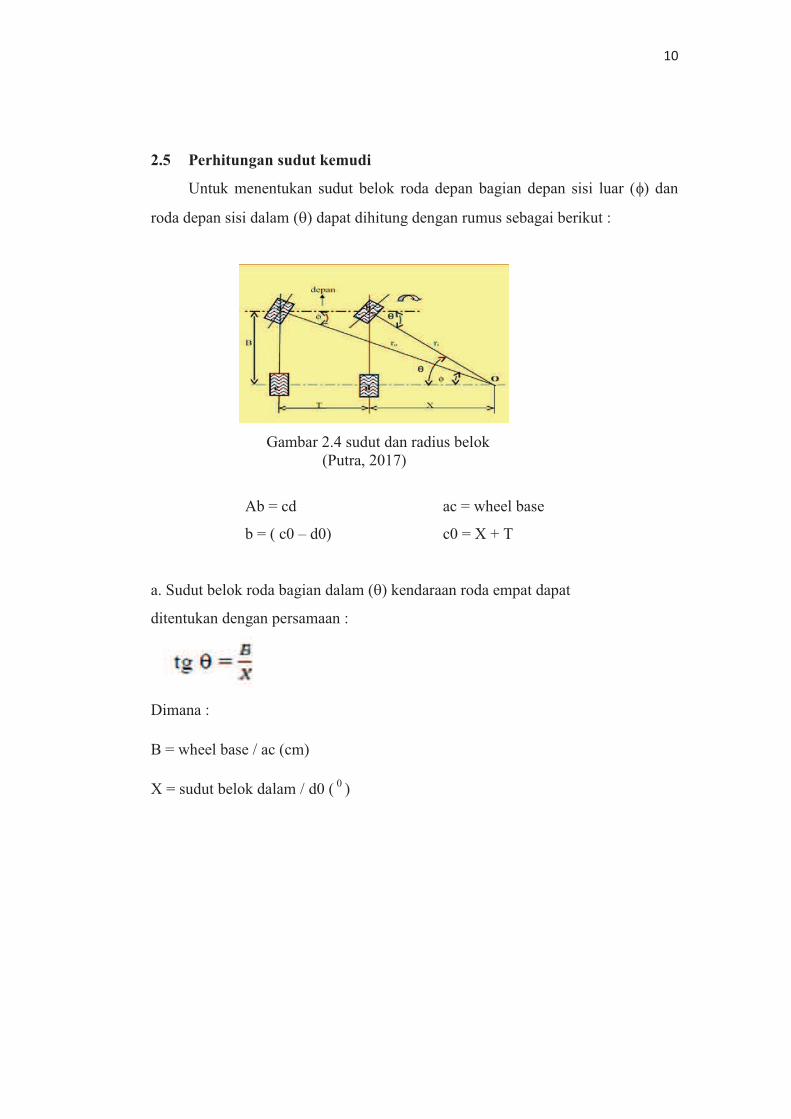
2.5 Perhitungan sudut kemudi
Untuk menentukan sudut belok roda depan bagian depan sisi luar (f) dan
roda depan sisi dalam (q) dapat dihitung dengan rumus sebagai berikut :
Gambar 2.4 sudut dan radius belok
(Putra, 2017)
Ab = cd ac = wheel base
b = ( c0 – d0) c0 = X + T
a. Sudut belok roda bagian dalam (q) kendaraan roda empat dapat
ditentukan dengan persamaan :
Dimana :
B = wheel base / ac (cm)
X = sudut belok dalam / d0 ( 0
)
11
b. Sudut belok roda bagian luar (f) dapat ditentukan dengan persamaan :
Dimana :
t = track / cd (cm)
B = wheel base / ac (cm)
X = sudut belok dalam / d0 ( 0
)
12
BAB III
METODE PENELITIAN
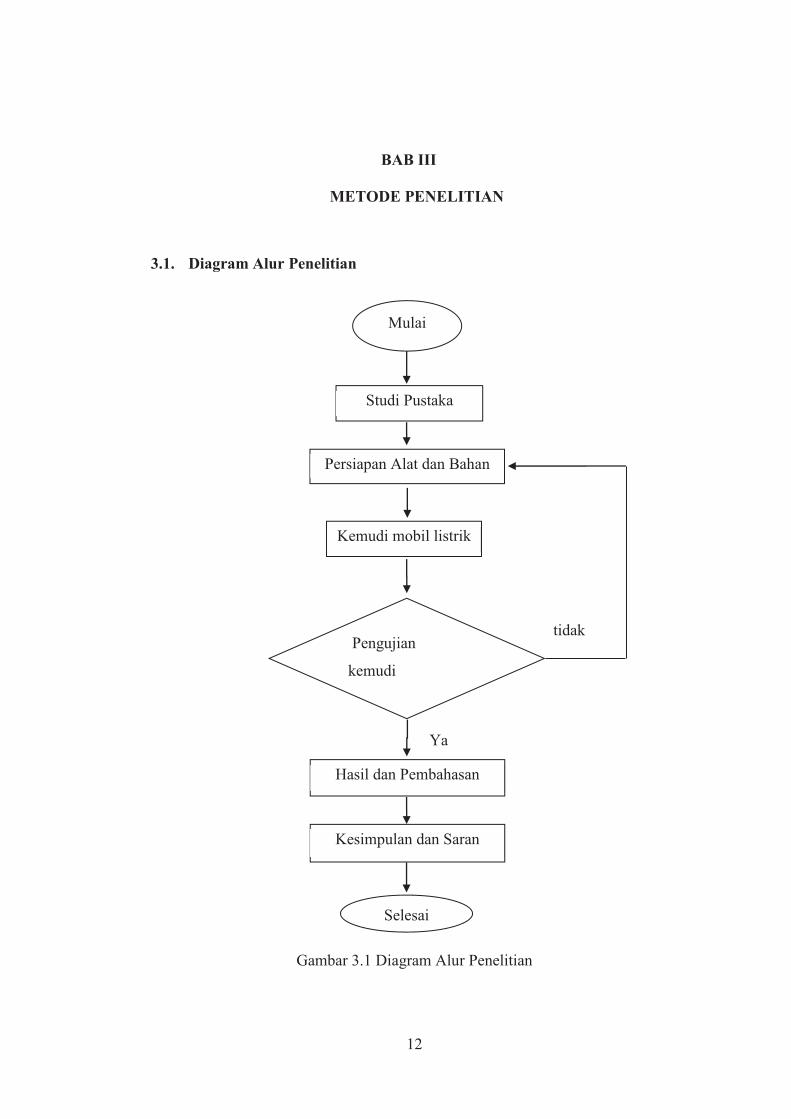
3.1. Diagram Alur Penelitian
tidak
Ya
Gambar 3.1 Diagram Alur Penelitian
Studi Pustaka
Persiapan Alat dan Bahan
Kemudi mobil listrik
Pengujian
kemudi
Hasil dan Pembahasan
Kesimpulan dan Saran
Mulai
Selesai
13
3.2. Alat dan Bahan
3.2.1. Alat
1. Meteran
Di gunakan untuk mengukur diameter radius pada mobil listrik 2 kilo waat
(suyono, 2013)
Gambar 3.2 Meteran
(dokumtasi, 2019)
2. Penggaris busur
Di gunakan untuk menghitung sudut roda dan sudut steer pada mobil listrik.
(Rusminto, dkk, 2017)
Gambar 3.3 Penggaris busur
(dokumtasi, 2019)
14
3.2.2 Bahan
Tabel 3.1. Bahan Pembuatan
NO NAMA BARANG JUMLAH
1 Steering kemudi ayla 1 set
2 Tie rod 2 buah
3 King pin 2 buah
4 steering Arm 2 buah
5 Rack End 1 buah
3.3 Metode Pengumpulan Data
Metode pengumpulan data dilakukan dengan cara mencari studi literature,
yaitu mengumpulkan data-data dari internet, buku referensi, dan jurnal-jurnal
yang relevan/terkait dengan topik penelitian.
Berikut data spesifikasi mobil listrik:
1. Panjang x Lebar : 210 x 110 cm
2. Motoran Listrik : 2 KwH
3. Pengereman Depan : Hidraulis Double Piston
4. Pengereman Belakang : Hidraulis Double Piston
5. Sistim Suspensi : Monoshock Type & Double Wishbound arm
6. Berat kendaraan : 150 Kg
7. Sistim Kemudi : Rack End
8. Panjang tie rod : 100 mm
9. Panjang rack : 300 mm
10. Panjang rack end : 100 mm
11. Lingkar roda : Ring 14

15
3.4 Metode Analisis Data
Metode analisis data untuk mengetahui lingkar sudut kemudi dengan cara
mengatur sudut belok kemudi mulai dari 300, 35
0, 40
0 kemudian dilakukan
pengukuran diameter lingkar putaran pada mobil listrik dan dilakukan untuk
menganalisa pada 3 titik penyetalan kemudi.
16
BAB IV
HASIL DAN PEMBAHASAN
4.1 Pengujian sudut kemudi
Pengujian kemudi dengan sudut 30o, 35
o dan 40
o Hasil pengolahan datanya
sebagai berikut:
1. Motoran yang digunakan berkapasitas 2 kw dengan putaran
2. Dengan sudut kemudi 30o, 35
o dan 40
o
3. Sistem kemudi menggunakan Rack End
4.2 Persiapan uji sudut kemudi dengan 3 titik penyetelan
pengujian sudut belok antara lain adalah dilakukan pada saat mobil listrik di
jalankan/dikendarai dengan membentuk pola lingkaran dengan sudut 30o, 35
o dan
40o dan dilakukan dengan langkah-langkah sebagai berikut:
a. Menyiapkan alat dan bahan yang akan digunakan saat pengujian. Untuk
alat yakni meteran sebagai alat ukur dan busur sebagai menghitung sudut
roda.
b. Mengendarai mobil listrik dengan pola lingkaran, yakni dengan memutar
roda kemudi ke kanan atau sebaliknya secara penuh dan dilanjutkan
memutar roda kemudi ke arah sebaliknya secara penuh juga seperti gambar
berikut.
17
Gambar 4.1 Pengujian Dengan Membentuk Pola Lingkaran
(Putra, 2017)
c. Untuk memudahkan pengukuran diameter radius belok pengujian dengan
membentuk pola lingkaran dilakukan dijalan dengan kontur datar dan
sedikit berpasir, hal ini bertujuan untuk memberikan kemudahan dalam
melakukan pengukuran karena jejak roda akan tertinggal dipasir. pengujian
sudut kemudi dengan 3 titik penyetelan yaitu 30o, 35
o dan 40
o
d. Mengukur radius sudut belok yakni dengan mengukur diameter dari titik
pusat lingkaran sampai titik terluar jejak roda.
Gambar 4.2 penyetelan sudut kemudi
(dokumtasi, 2019)
18
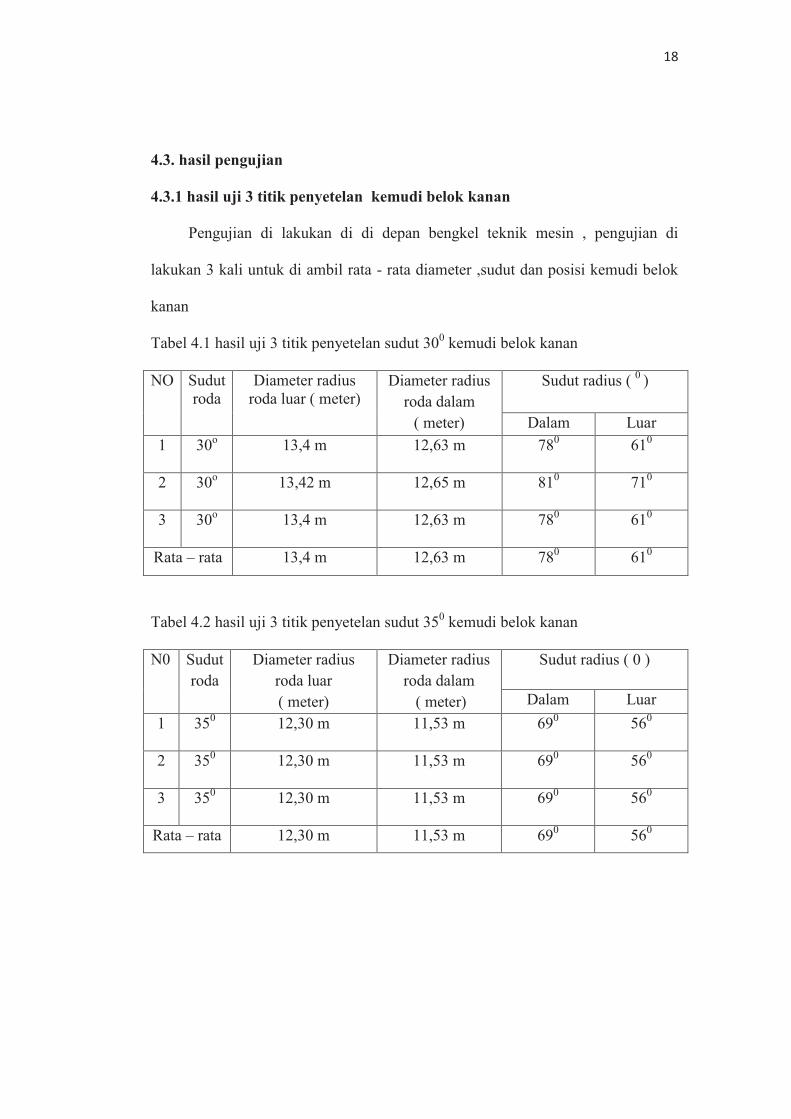
4.3. hasil pengujian
4.3.1 hasil uji 3 titik penyetelan kemudi belok kanan
Pengujian di lakukan di di depan bengkel teknik mesin , pengujian di
lakukan 3 kali untuk di ambil rata - rata diameter ,sudut dan posisi kemudi belok
kanan
Tabel 4.1 hasil uji 3 titik penyetelan sudut 300 kemudi belok kanan
NO Sudut
roda
Diameter radius
roda luar ( meter)
Diameter radius
roda dalam
( meter)
Sudut radius ( 0
)
Dalam Luar
1 30o 13,4 m 12,63 m 78
0 61
0
2 30o 13,42 m 12,65 m 81
0 71
0
3 30o 13,4 m 12,63 m 78
0 61
0
Rata – rata 13,4 m 12,63 m 780 61
0
Tabel 4.2 hasil uji 3 titik penyetelan sudut 350 kemudi belok kanan
N0 Sudut
roda
Diameter radius
roda luar
( meter)
Diameter radius
roda dalam
( meter)
Sudut radius ( 0 )
Dalam Luar
1 350 12,30 m 11,53 m 69
0 56
0
2 350 12,30 m 11,53 m 69
0 56
0
3 350 12,30 m 11,53 m 69
0 56
0
Rata – rata 12,30 m 11,53 m 690 56
0

19
Tabel 4.3 hasil uji 3 titik penyetelan sudut 400 kemudi belok kanan
N0 Sudut
roda
Diameter radius
roda luar
( meter)
Diameter radius
roda dalam
( meter)
Sudut radius ( 0
)
Dalam Luar
1 400 11,90 m 11,13 m 50
0 43
0
2 400 11,90 m 11,13 m 50
0 43
0
3 400 11,87 m 11,10 m 49
0 38
0
Rata – rata 11,90 m 11,13 m 500 43
0
Tabel 4.4 hasil rata – rata uji 3 titik penyetelan kemudi belok kanan
No Sudut
roda
Diameter radius
roda luar
( meter)
Diameter radius
roda dalam
( meter)
Sudut radius ( 0
)
Dalam Luar
1 300 13,4 m 12,63 m 78
0 61
0
2 350 12,30 m 11,53 m 69
0 56
0
3 400
11,90 m 11,13 m 500 43
0
Gambar 4.3 mengukur diameter radius
(dokumtasi, 2019)
20
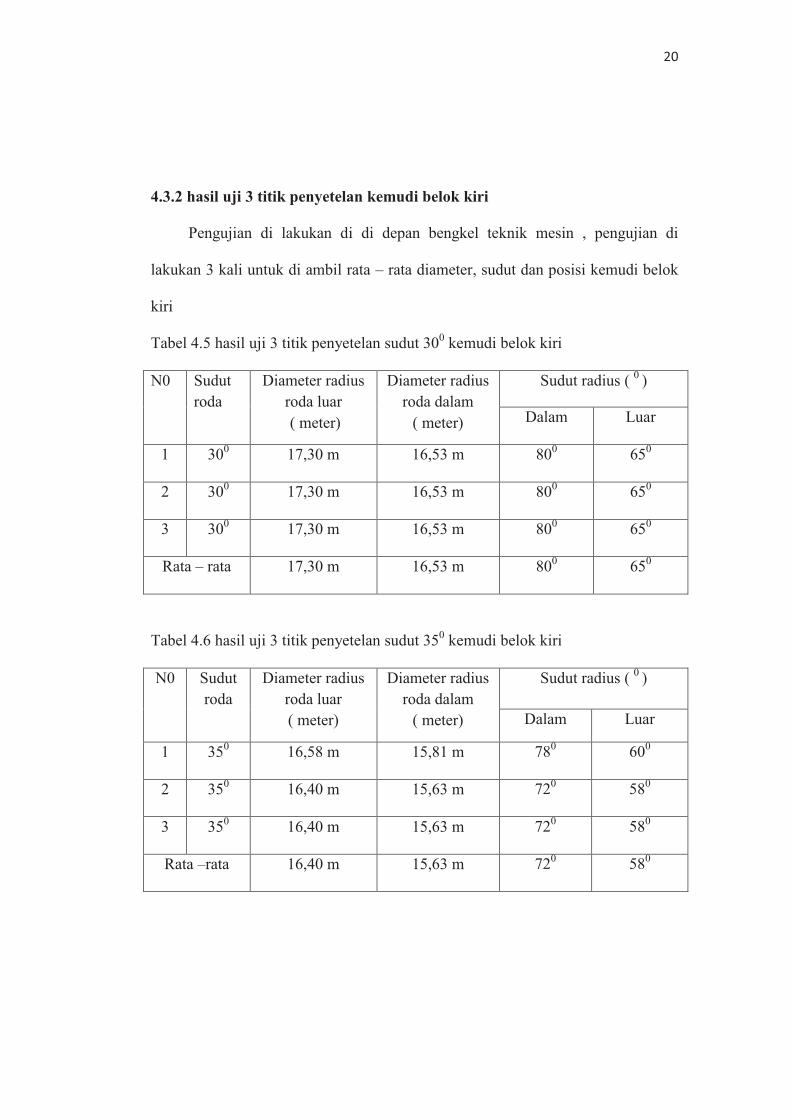
4.3.2 hasil uji 3 titik penyetelan kemudi belok kiri
Pengujian di lakukan di di depan bengkel teknik mesin , pengujian di
lakukan 3 kali untuk di ambil rata – rata diameter, sudut dan posisi kemudi belok
kiri
Tabel 4.5 hasil uji 3 titik penyetelan sudut 300 kemudi belok kiri
N0 Sudut
roda
Diameter radius
roda luar
( meter)
Diameter radius
roda dalam
( meter)
Sudut radius ( 0
)
Dalam Luar
1 300 17,30 m 16,53 m 80
0 65
0
2 300 17,30 m 16,53 m 80
0 65
0
3 300 17,30 m 16,53 m 80
0 65
0
Rata – rata 17,30 m 16,53 m 800 65
0
Tabel 4.6 hasil uji 3 titik penyetelan sudut 350 kemudi belok kiri
N0 Sudut
roda
Diameter radius
roda luar
( meter)
Diameter radius
roda dalam
( meter)
Sudut radius ( 0
)
Dalam Luar
1 350 16,58 m 15,81 m 78
0 60
0
2 350 16,40 m 15,63 m 72
0 58
0
3 350 16,40 m 15,63 m 72
0 58
0
Rata –rata 16,40 m 15,63 m 720 58
0
21
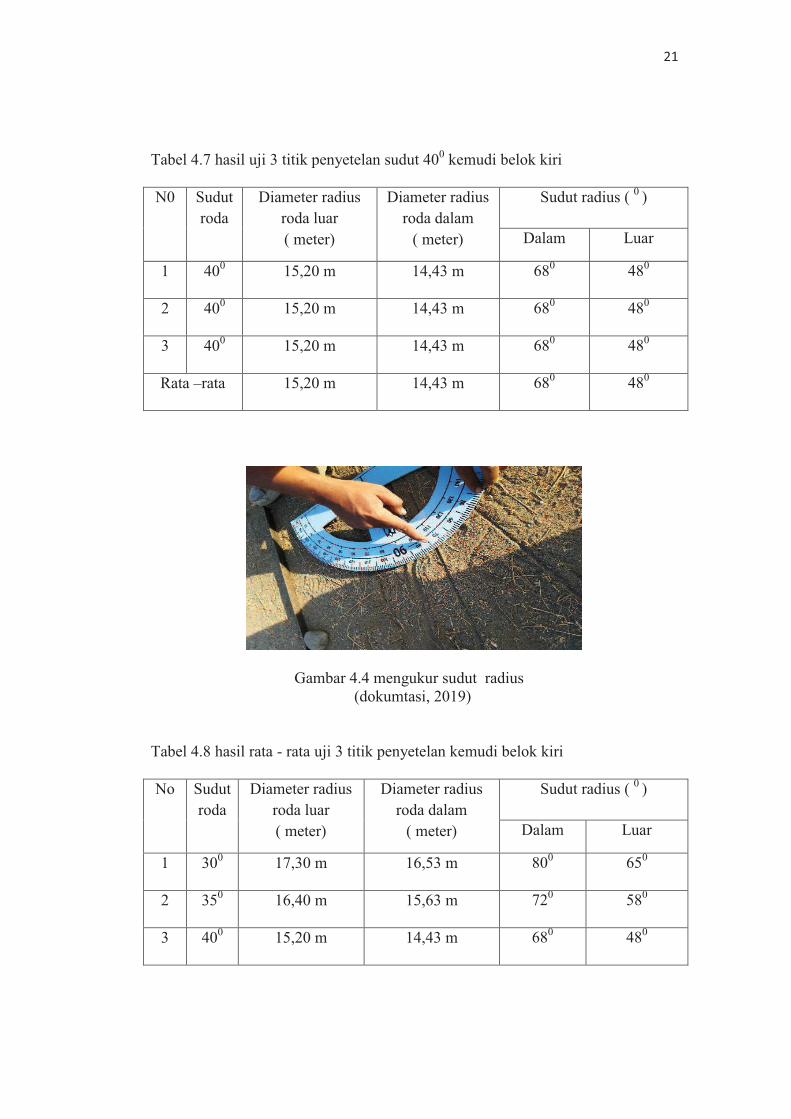
Tabel 4.7 hasil uji 3 titik penyetelan sudut 400 kemudi belok kiri
N0 Sudut
roda
Diameter radius
roda luar
( meter)
Diameter radius
roda dalam
( meter)
Sudut radius ( 0
)
Dalam Luar
1 400 15,20 m 14,43 m 68
0 48
0
2 400 15,20 m 14,43 m 68
0 48
0
3 400 15,20 m 14,43 m 68
0 48
0
Rata –rata 15,20 m 14,43 m 680 48
0
Gambar 4.4 mengukur sudut radius
(dokumtasi, 2019)
Tabel 4.8 hasil rata - rata uji 3 titik penyetelan kemudi belok kiri
No Sudut
roda
Diameter radius
roda luar
( meter)
Diameter radius
roda dalam
( meter)
Sudut radius ( 0
)
Dalam Luar
1 300 17,30 m 16,53 m 80
0 65
0
2 350 16,40 m 15,63 m 72
0 58
0
3 400
15,20 m 14,43 m 680 48
0
22
BAB V
PENUTUP
5.1 kesimpulan
Hasil penelitian yang di hasilkan yaitu analisi sistem kemudi mobil listrik 2 Kw
dengan 3 titik penyetelan pada steering arm pada sudut 300, 35
0 dan 40
0 dapat di
ambil kesimpulan :
1. 300
di dapat diamter radius dalam kanan 12,63 m, kiri 16,53 m, untuk
diameter radius luarnya kanan 13,4 m, kiri 17,30 m dan sudut radius dalam
kanan di peroleh 780, kiri 80
0, sudut radius luarnya untuk kanan 61
0, untuk
kiri 650
2. 350
di dapat diamter radius dalam kanan 11,53 m, kiri 15,63 m, untuk
diameter radius luarnya kanan 12,30 m, kiri 16,40 m dan sudut radius
dalam kanan di peroleh 690, kiri 73
0, sudut radius luarnya untuk kanan 56
0,
untuk kiri 580
3. 400
di dapat diamter radius dalam kanan 11,13 m, kiri 14,43 m, untuk
diameter radius luarnya kanan 11,90 m, kiri 15,20 m dan sudut radius
dalam kanan di peroleh 500, kiri 68
0, sudut radius luarnya untuk kanan 43
0,
untuk kiri 460
Dari hasil penelitian di atas dapat di ketahui bahwa semakin besar sudut roda
semakin kecil pula radius putarnya, semakin kecil sudut roda nya maka sudut
radiusnya semakin besar dan untuk roda kiri dan kanan berbeda – beda hasilnya.
23
5.2 Saran
Adapun saran dari peneitian ini adalah sebagai berikut :
1. Sebelum melakukan pengujian cek terlebih dahulu yang akan di uji untuk
pengantisipasi hal – hal yang tidak di inginkan dan mengurangi resiko
kecelakan
2. Dari segi kualitas maka penggunaan barang yang masih baru akan lebih
memiliki fungsi yang baik dan serta lebih terjamin kualitasnya
3. Dalam pengujian alangkah baiknya menggunakan alat uji yang memiliki
Memiliki tingkat akurasi yang baik, biar hasil yang di dapat lebih maksimal
24
DAFTAR PUSTAKA
Andrian F, H, 2017, Rancang Bangun Mobil Listrik Dengan Differential Untuk
Pengujian Slalom. Tugas Akhir, Jurusan Teknik Mesin,Politeknik Harapan
Bersama, Tegal
Heriana Erik, 2015,Modifikasi Sistem Kemudi Manual Menjadi Tipe Rack And
Pinion Pada Angkutan Pedesaan,Universitas Pancasila Jakarta Selatan .
Jurnal Magister Teknik Mesin Vol. O5, No, 01, ISSN : 2088-5784
Putra A, N, 2017, Pembuatan Dudukan Sistem Kemudi Pada MobilBarang Tahun
2013. Tugas Akhir , Jurusan Teknik Mesin, Universitas Negeri Yogyakarta,
Yogyakarta
Rusminto Syahyuniar, dkk, 2017. Perancangan Sistem Kemudi Manual Pada
Mobil Listrik. Politeknik Negeri Tanah LautKalimantan Selatan. Jurnal
Teknik Mesin Vol. O4, No. 01, ISSN : 2442-4471
Suyono Agus, 2013, Rancang Bangun Sistem Kemudi Manual Pada Mobil
Listrik. UNESA Surabaya. Jurnal Teknik Mesin Vol. 01, No. 02, Hal 187-
195
Triwinarno Yunarko Dan Hidayatullah Taufiq, 2005. Analisa Sudut Belok Roda
Belakang Sebagai Sudut Belok Roda Depan Dan Kecepatan Pada Kendaran
Mini 4WS. Institut Teknologi Sepuluh November Surabaya. Jurnal Teknik
Mesin Vol. 7, No. 1, Hal 15 – 21
Wijaya R, B dan Benidiktus T.P., 2015. Pengujian Unjuk Kerja Mobil
Listrik. Tugas Akhir, Jurusan Teknik Mesin, Universitas Gadja
Mada, Yogyakarta
25
Wiyono Y, P, A, dkk., 2018. Sistem Transmisi Otomatis Dengan Metode
Continuosly Variable Transmision Pada Mobil Listrik. Universitas Telkom
Bandung.E-proceeding of Engineering Vol. 05, No. 03, ISSN : 2355-9365
Zainuri Fuad, dkk., 2016. Optimalisasi Rancang Bangun Mobil Listrik Sebuah
Studi Kendaran Hemat Energi Sebagai Solusi Alternatif Krisis Energi
Dunia. Politeknik Negeri Jakarta. Jurnal Poli-Teknologi, Vol. 14, No. 03
26
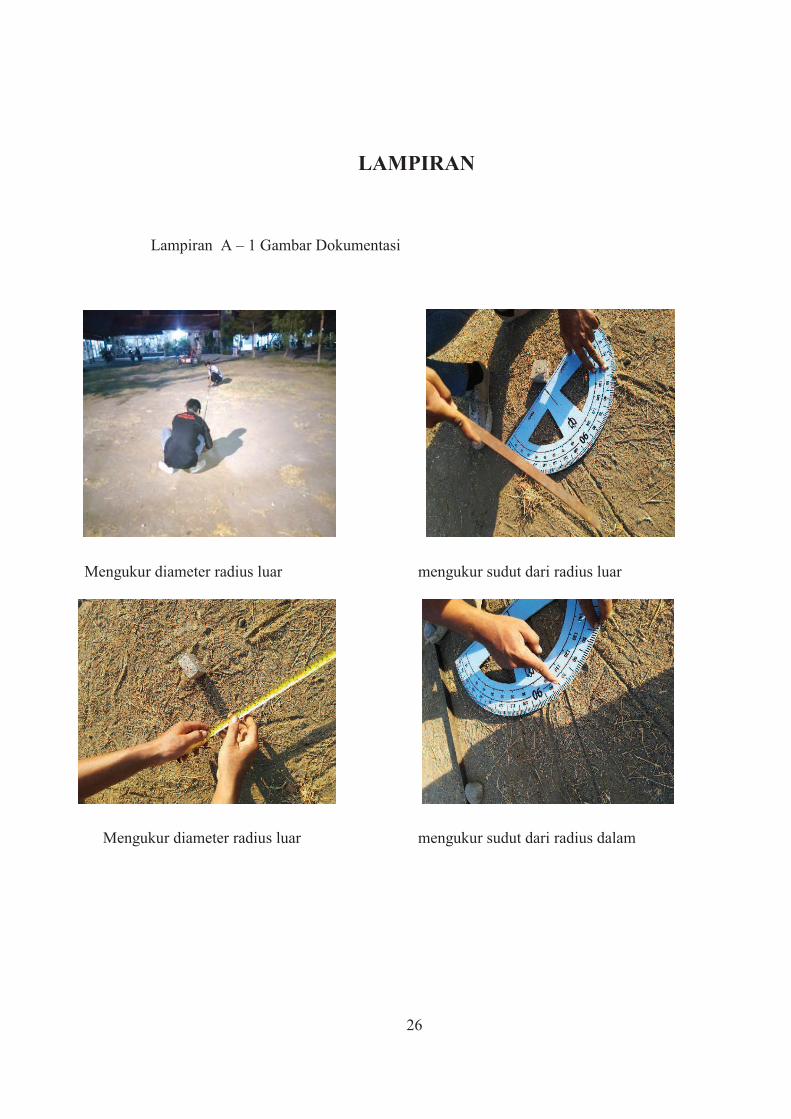
LAMPIRAN
Lampiran A – 1 Gambar Dokumentasi
Mengukur diameter radius luar mengukur sudut dari radius luar
Mengukur diameter radius luar mengukur sudut dari radius dalam
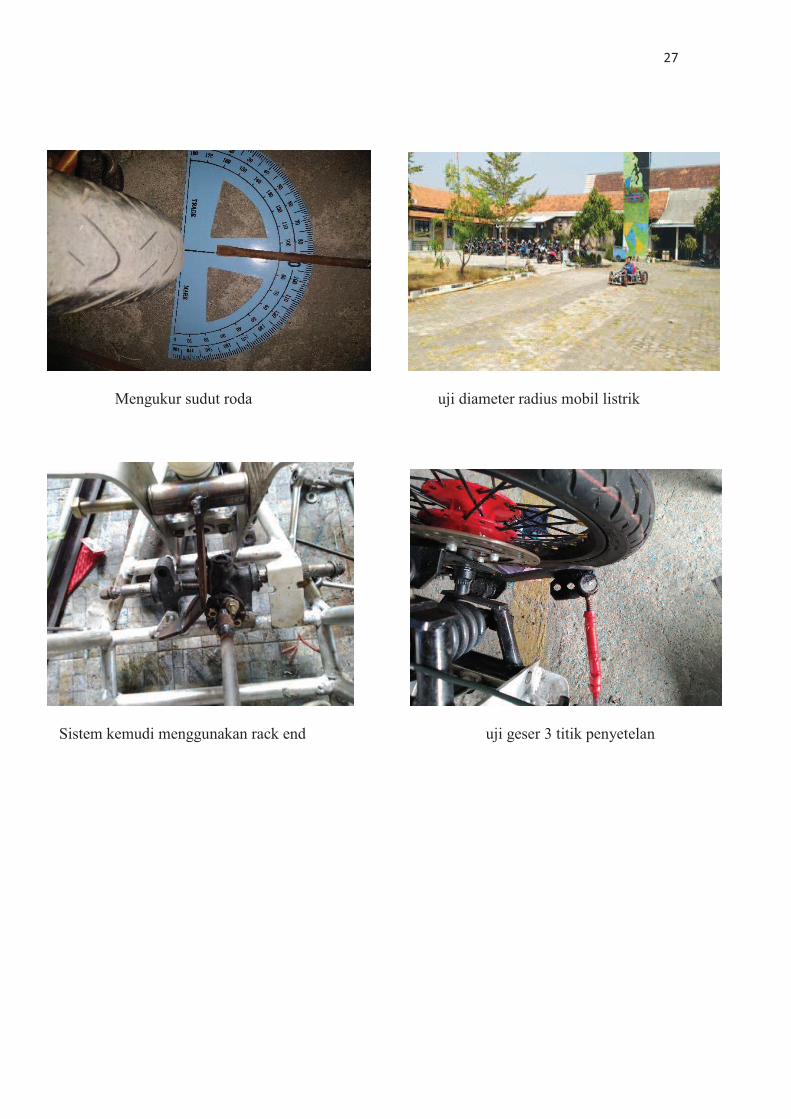
27
Mengukur sudut roda uji diameter radius mobil listrik
Sistem kemudi menggunakan rack end uji geser 3 titik penyetelan
28
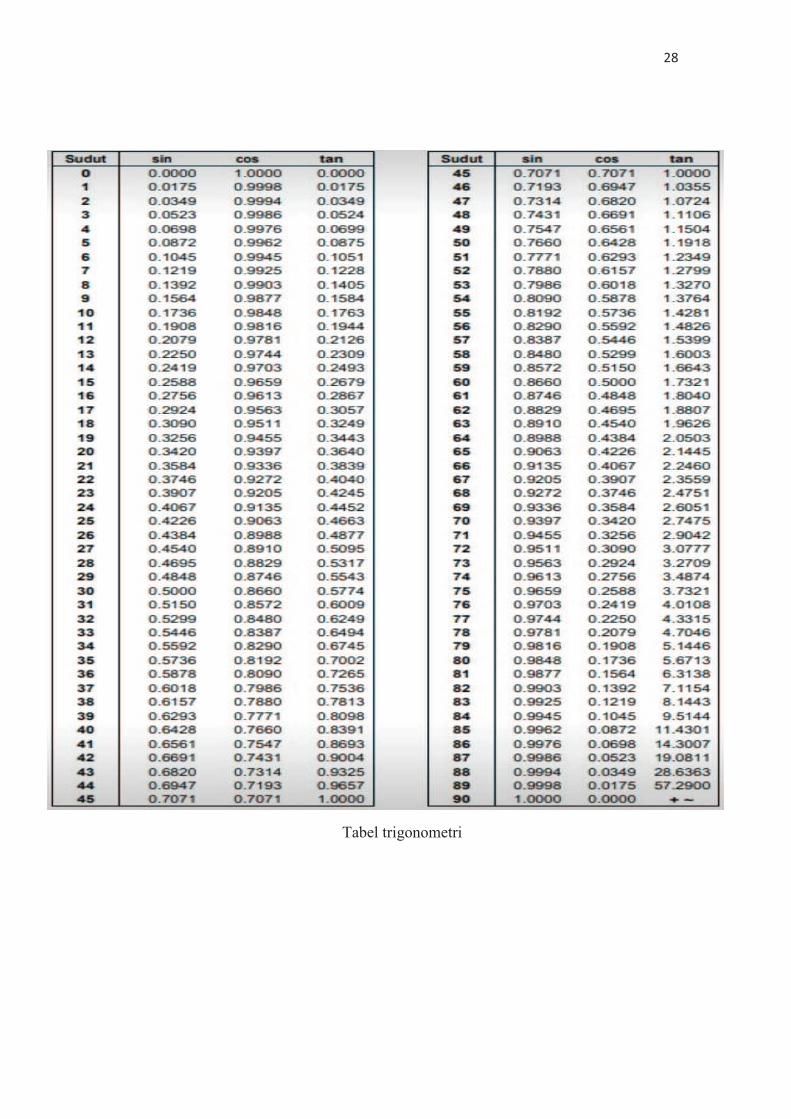
Tabel trigonometri
29
30
31
32

33











![KW[from 1994]wac_c.pdf](https://static.fdokumen.com/doc/165x107/6314afe3c72bc2f2dd0476e0/kwfrom-1994waccpdf.jpg)




