A resource allocation strategy in a robotic ad-hoc network
6
A Resource Allocation Strategy in a Robotic Ad-Hoc Network Matthew Tan 1 , Lujia Wang 2 , Danilo Tardioli 3 and Ming Liu 4 Abstract— Ad-hoc networks, being infrastructure-less, have much scarcer amounts of bandwidth. Most multi-robotic ap- plications adopt decentralised approaches in order to avoid single points-of-failure. A decentralised approach would require robots to continuously update each other to coordinate their ac- tions. For successful coordination, hard real-time requirements must be met. Thus, a resource allocation strategy is required to fulfil these requirements. This paper presents a novel resource allocation strategy that uses auction-based methods to allocate the network resource among nodes in a robotic ad-hoc network. The strategy’s aim is two-fold: 1) to allocate the network fairly among all nodes when unmanned; 2) to allocate more of the network resource to a node that the user may favour over the other nodes. It has been tested in two different indoor environments to see how environmental factors affect the performance of the system. The experimental results show that the proposed resource allocation strategy improves the use of bandwidth and enhances transmission. I. I NTRODUCTION In recent years, researchers in robotics have been focusing on task allocation problems, which is a subset of the field of resource allocation problems. The Contract Net Protocol [1] features algorithms that allow many nodes to negotiate and agree on ‘contracts’ to complete composite tasks among each other, based on each node’s current capabilities and workloads. It successfully introduced a general framework of using auction-based mechanisms in cooperative robotics. MURDOCH [2] was the first implementation on top of the CNP framework in robotics to introduce single-round, first- price auctions. The quality of its produced allocations is considered to be 3-competitive for on-line task problems (tasks that arrive at random). Computational costs are very low and network resources used are linearly related to the number of robots. TraderBots [3] is probably the most repre- sentative implementation of early auction-based techniques for multirobot coordination. The active use of a market economy helps to take into account changes in the global environment in a decentralised way. While the CNP can be applied to any kind of multi-agent system, MURDOCH and TraderBots are more specific to task allocation for mobile robots. However, the validation of these systems do not consider applications that require real-time data transmission. The bidding process used in most contract-based algo- rithms commonly follow the Vickery auctions [4]. Various 1 Matthew Tan was an exchange student at ETH Zurich. His home uni- versity is Imperial College London. email: [email protected] 2 Lujia Wang is completing her PhD at The Chinese University of Hong Kong. email: [email protected] 3 Danilo Tardioli is an Associate Professor at Centro Universitario de la Defensa, Zaragoza (Spain). email: [email protected] 4 Ming Liu is a Visiting Assistant Professor at the Hong Kong University of Science and Technology. email: [email protected] This work was supported by HKUST project IGN13EG03. systems have different implementations of these auctions. For example, [5] suggests having multiple one-round auctions to allocate all tasks to robots before execution. The algorithm is a centric one which uses six bidding rules for a single task. For time-sensitive applications, a design with many iterations in the bidding process is not suitable as a sizeable amount of time has to be spent on the auction alone. Furthermore, this system has an element of centrality, limiting the purposeful- ness of decentralised systems. The authors in [6] present a hierarchical auction-based mechanism, which considers real-time resource retrieval for multi-robot systems. However, environmental factors were not considered in the experiments. Finally, [7] proposes an algorithm that follows a modified Vickery auction: the merchant raises the prices of tasks, instead of bidders increasing their bids to win the auction. The intended outcome is still consistent with other task- allocation algorithms: to ensure the task is executed by the most-able agent. It is yet to be seen, however, how this algorithm performs under environmental influences, while having to fulfil hard real-time requirements too. Other than not addressing the hard real-time requirements, the above contributions tackle the resource allocation prob- lem only at the application level and not at the protocol level. Furthermore, most of them gauge the performance of the algorithms in simulators. This paper attempts to address this gap in research by testing the effectiveness of this proposed resource allocation strategy in a typical indoor environment. It is organised as follows: Section II gives an overview of the Real Time - Wireless Multi-Hop Protocol (RT-WMP) [8], the routing protocol used in this paper; Section III describes how the resource allocation strategy works; Section IV reveals the simulations used to determine suitable parameters for the strategy; Section V presents the experiments conducted to test the effectiveness of the resource allocation strategy and present the results; finally, Section VI concludes this paper with insights drawn from the research and provides an overview into future work. II. REAL TIME -WIRELESS MULTI -HOP PROTOCOL (RT-WMP) A. Overview of RT-WMP The RT-WMP is a token-based routing protocol that works on existing IEEE 802.11b/g/n protocols. It was chosen as the routing protocol in the ad-hoc networks of the experiments because of its robust multi-hop ability. Also, data flows in the network could be dynamically prioritised, allowing the user to determine which node can transmit. Some other notable features that contributed to its selec- tion are highlighted below: 2014 IEEE International Conference on Autonomous Robot Systems and Competitions (ICARSC) May 14-15, Espinho, Portugal 978-1-4799-4254-1/14/$31.00 ©2014 IEEE 122
-
Upload
independent -
Category
Documents
-
view
0 -
download
0
Transcript of A resource allocation strategy in a robotic ad-hoc network

A Resource Allocation Strategy in a Robotic Ad-Hoc Network
Matthew Tan1, Lujia Wang2, Danilo Tardioli3 and Ming Liu4
Abstract— Ad-hoc networks, being infrastructure-less, havemuch scarcer amounts of bandwidth. Most multi-robotic ap-plications adopt decentralised approaches in order to avoidsingle points-of-failure. A decentralised approach would requirerobots to continuously update each other to coordinate their ac-tions. For successful coordination, hard real-time requirementsmust be met. Thus, a resource allocation strategy is requiredto fulfil these requirements.
This paper presents a novel resource allocation strategy thatuses auction-based methods to allocate the network resourceamong nodes in a robotic ad-hoc network. The strategy’s aim istwo-fold: 1) to allocate the network fairly among all nodes whenunmanned; 2) to allocate more of the network resource to a nodethat the user may favour over the other nodes. It has been testedin two different indoor environments to see how environmentalfactors affect the performance of the system. The experimentalresults show that the proposed resource allocation strategyimproves the use of bandwidth and enhances transmission.
I. INTRODUCTIONIn recent years, researchers in robotics have been focusing
on task allocation problems, which is a subset of the fieldof resource allocation problems. The Contract Net Protocol[1] features algorithms that allow many nodes to negotiateand agree on ‘contracts’ to complete composite tasks amongeach other, based on each node’s current capabilities andworkloads. It successfully introduced a general frameworkof using auction-based mechanisms in cooperative robotics.MURDOCH [2] was the first implementation on top of theCNP framework in robotics to introduce single-round, first-price auctions. The quality of its produced allocations isconsidered to be 3-competitive for on-line task problems(tasks that arrive at random). Computational costs are verylow and network resources used are linearly related to thenumber of robots. TraderBots [3] is probably the most repre-sentative implementation of early auction-based techniquesfor multirobot coordination. The active use of a marketeconomy helps to take into account changes in the globalenvironment in a decentralised way. While the CNP can beapplied to any kind of multi-agent system, MURDOCH andTraderBots are more specific to task allocation for mobilerobots. However, the validation of these systems do notconsider applications that require real-time data transmission.
The bidding process used in most contract-based algo-rithms commonly follow the Vickery auctions [4]. Various
1 Matthew Tan was an exchange student at ETH Zurich. His home uni-versity is Imperial College London. email: [email protected]
2 Lujia Wang is completing her PhD at The Chinese University of HongKong. email: [email protected]
3 Danilo Tardioli is an Associate Professor at Centro Universitario de laDefensa, Zaragoza (Spain). email: [email protected]
4 Ming Liu is a Visiting Assistant Professor at the Hong Kong Universityof Science and Technology. email: [email protected]
This work was supported by HKUST project IGN13EG03.
systems have different implementations of these auctions. Forexample, [5] suggests having multiple one-round auctions toallocate all tasks to robots before execution. The algorithm isa centric one which uses six bidding rules for a single task.For time-sensitive applications, a design with many iterationsin the bidding process is not suitable as a sizeable amount oftime has to be spent on the auction alone. Furthermore, thissystem has an element of centrality, limiting the purposeful-ness of decentralised systems.
The authors in [6] present a hierarchical auction-basedmechanism, which considers real-time resource retrieval formulti-robot systems. However, environmental factors werenot considered in the experiments.
Finally, [7] proposes an algorithm that follows a modifiedVickery auction: the merchant raises the prices of tasks,instead of bidders increasing their bids to win the auction.The intended outcome is still consistent with other task-allocation algorithms: to ensure the task is executed by themost-able agent. It is yet to be seen, however, how thisalgorithm performs under environmental influences, whilehaving to fulfil hard real-time requirements too.
Other than not addressing the hard real-time requirements,the above contributions tackle the resource allocation prob-lem only at the application level and not at the protocol level.Furthermore, most of them gauge the performance of thealgorithms in simulators. This paper attempts to address thisgap in research by testing the effectiveness of this proposedresource allocation strategy in a typical indoor environment.It is organised as follows: Section II gives an overview of theReal Time - Wireless Multi-Hop Protocol (RT-WMP) [8], therouting protocol used in this paper; Section III describes howthe resource allocation strategy works; Section IV revealsthe simulations used to determine suitable parameters forthe strategy; Section V presents the experiments conductedto test the effectiveness of the resource allocation strategyand present the results; finally, Section VI concludes thispaper with insights drawn from the research and provides anoverview into future work.
II. REAL TIME - WIRELESS MULTI-HOP PROTOCOL(RT-WMP)
A. Overview of RT-WMPThe RT-WMP is a token-based routing protocol that works
on existing IEEE 802.11b/g/n protocols. It was chosen as therouting protocol in the ad-hoc networks of the experimentsbecause of its robust multi-hop ability. Also, data flows inthe network could be dynamically prioritised, allowing theuser to determine which node can transmit.
Some other notable features that contributed to its selec-tion are highlighted below:
2014 IEEE International Conference onAutonomous Robot Systems and Competitions (ICARSC)May 14-15, Espinho, Portugal
978-1-4799-4254-1/14/$31.00 ©2014 IEEE 122
Data TransmissionAuction PriorityIncrease
PriorityDecrease
...timeTransmission Slots
50ms 600ms 600ms3000ms
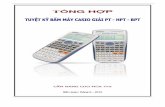
Fig. 1: Structure of Transmission Slots
• easy implementation in the user space of a Linuxsystem;
• consequently, existing WiFi equipment can still be used;• storage of incoming messages of the same priority done
in FIFO order (transmission queue);• ability to fulfil hard real-time requirements.The interested reader may refer to [8] to get a detailed
understanding on how the protocol works.B. Benchmarking of RT-WMP
Benchmarking experiments were conducted in two dif-ferent indoor environments: one in an area with minimalWiFi interference, the other in an area with significant WiFiinterference. The results show that congestion in the WiFibandwidth greatly affects the transmission quality. (See [9]for detailed results.) In order to reach the optimal transmis-sion of data, a resource allocation strategy is necessary. Theproposed strategy is discussed in the next section.
III. RESOURCE ALLOCATION STRATEGYThis section describes the aim and the mechanism of the
resource allocation strategy developed.
A. AimThe aim of the resource allocation strategy is two-fold:• To allocate the network resource as fairly as possible in
an autonomous networked system. (Fair Transmission)• To allocate 80% of the network resource to a particular
node that the user wishes to favour, while ensuring thatall other nodes still get to transmit periodically at alower frequency, thus ensuring that there is no largebacklog of data packets stored within the transmissionqueues. (Biased Transmission)
B. MechanismThe network resource is modelled as an infinite queue
of individual transmission slots (Fig 1). Each transmissionslot is further subdivided into a further four phases, namelyAuction, Priority Increase, Data Transmission and PriorityDecrease. Each of these phases are explained below:
1) Auction: As each transmission slot can be utilised byone node in the network only, each node is required to bid forthe right to use the transmission slot. The auction is a one-round, Vickery style auction (the winning bid is the highestbid). The individual bids of each node are broadcasted to allnodes in the network. The nodes then compare their own bidswith the bids of the other nodes locally. The losing biddersthen wait for the Auction phase of the next transmissionslot, while the winner moves on to the next phase. Theauction phase lasts 50ms to give sufficient time for bids tobe broadcasted to all nodes.
0 1 2 3 4 5 6x 104
0
100
200
300
400
500
Time (ms)
Tim
eA
dvan
tage
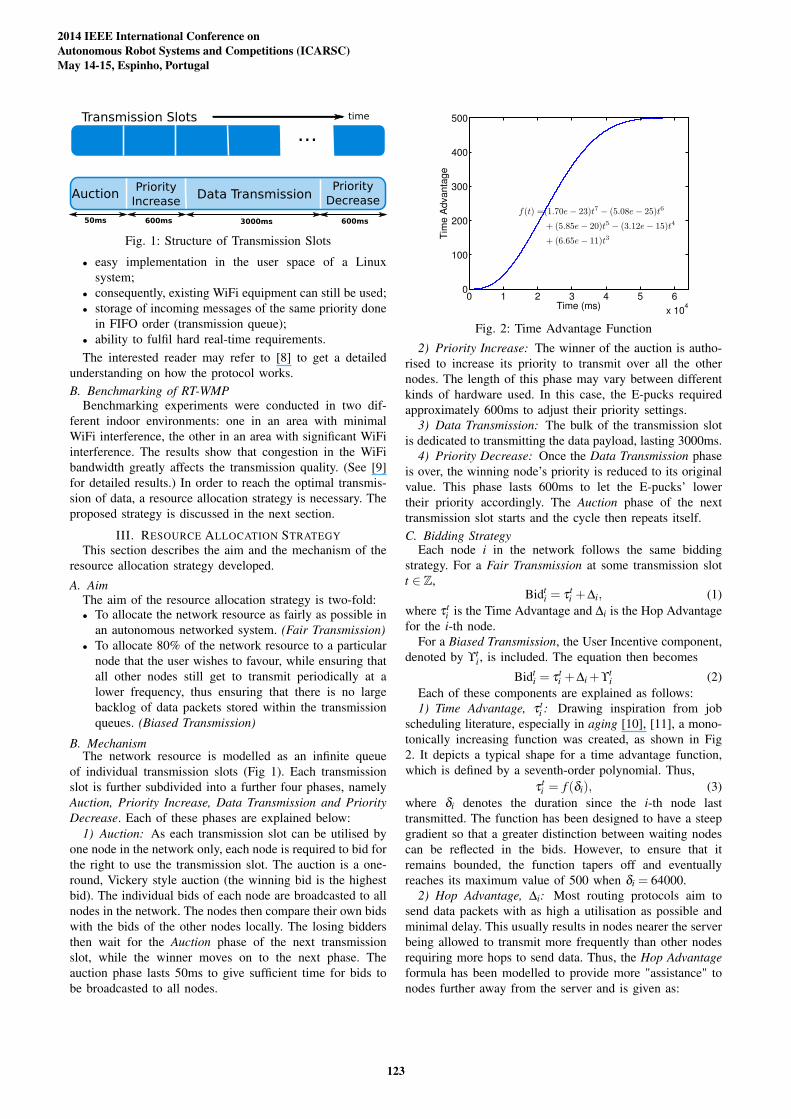
Fig. 2: Time Advantage Function
2) Priority Increase: The winner of the auction is autho-rised to increase its priority to transmit over all the othernodes. The length of this phase may vary between differentkinds of hardware used. In this case, the E-pucks requiredapproximately 600ms to adjust their priority settings.
3) Data Transmission: The bulk of the transmission slotis dedicated to transmitting the data payload, lasting 3000ms.
4) Priority Decrease: Once the Data Transmission phaseis over, the winning node’s priority is reduced to its originalvalue. This phase lasts 600ms to let the E-pucks’ lowertheir priority accordingly. The Auction phase of the nexttransmission slot starts and the cycle then repeats itself.C. Bidding Strategy
Each node i in the network follows the same biddingstrategy. For a Fair Transmission at some transmission slott ∈ Z,
Bidti = τ t
i +∆i, (1)where τ t
i is the Time Advantage and ∆i is the Hop Advantagefor the i-th node.
For a Biased Transmission, the User Incentive component,denoted by ϒt
i , is included. The equation then becomes
Bidti = τ t
i +∆i +ϒti (2)
Each of these components are explained as follows:1) Time Advantage, τ t
i : Drawing inspiration from jobscheduling literature, especially in aging [10], [11], a mono-tonically increasing function was created, as shown in Fig2. It depicts a typical shape for a time advantage function,which is defined by a seventh-order polynomial. Thus,
τ ti = f (δi), (3)
where δi denotes the duration since the i-th node lasttransmitted. The function has been designed to have a steepgradient so that a greater distinction between waiting nodescan be reflected in the bids. However, to ensure that itremains bounded, the function tapers off and eventuallyreaches its maximum value of 500 when δi = 64000.
2) Hop Advantage, ∆i: Most routing protocols aim tosend data packets with as high a utilisation as possible andminimal delay. This usually results in nodes nearer the serverbeing allowed to transmit more frequently than other nodesrequiring more hops to send data. Thus, the Hop Advantageformula has been modelled to provide more "assistance" tonodes further away from the server and is given as:
2014 IEEE International Conference onAutonomous Robot Systems and Competitions (ICARSC)May 14-15, Espinho, Portugal
123

∆i = a#Hops, (4)
where a is a scalar that varies with the number of nodesand was determined from simulations (See Section IV) and#Hops is the number of hops to reach the server.
3) User Incentive, ϒti: The User Incentive contributes to
the bid during Biased Transmissions only. It simply elevatesthe favoured node’s bid above all the other nodes, therebyallowing that node to win more auctions and hence havepriority to transmit more frequently. However, this incentivecannot remain at its current value as none of the other nodeswould be able to transmit. Thus a "decrease-and-replenish"system is utilised to continuously adjust the incentive of thenode. This is described below with the aid of Fig 3.
Threshold
A1
A2
A3
Fig. 3: Trend of the Incentive for an Incentivised Node
1) At the beginning (where Arrow A1 points to), thefavoured node is given a certain amount of incentiveξIn jection, which is the amount of incentive "injected"to node i (Refer to Section IV for the derivation of thisvalue). In other words, once the node is favoured,
ϒti = ξIn jection (5)
2) When the favoured node wins an auction (Arrow A2),the amount of user incentive for the i-th node at thenext timeslot t + 1, ϒt
i is decreased by an amountεincentive (refer to Section IV for the derivation of thisvalue). In other words, for each iteration where thenode wins the auction,
ϒt+1i = ϒt
i− εincentive (6)
This allows the total bid of the favoured node todecrease overtime, thereby allowing the other nodesthe chance to win the auction and transmit. Note thatif the favoured node did not win a particular auction,then the user incentive is not decreased.
3) Once the amount of user incentive decreases to acertain threshold value (Arrow A3), it is immediatelyreplenished with ξIn jection. Mathematically,
ϒti+= ξIn jection (7)
This replenishment allows the favoured node to winmore of the following auctions, thereby ensuring thatit gets to transmit for most of the time.
IV. SIMULATIONS
Simulations were required to determine suitable parame-ters for the following variables:• a in equation (4)• ξIn jection in equation (5)• εincentive in equation (6)The simulations conducted were subject to the same
simulation environment. To measure the goodness of thesimulation results, a system utility function was also defined.
A. System Utility Function
The aim of the system utility function was to determinehow close the simulation results were towards achieving theaim of the resource allocation strategy.
The system utility function is defined as:
U(t) = λ (U1(t))+(1−λ )(U2(t)) ,{λ = 0 f or Fair Transmissionλ = 1 f or Biased Transmission
(8)
U1(t) and U2(t) are the sub-utility functions that determinehow close the network is to the ideal for the Biased Trans-mission case and Fair Transmission case respectively at aparticular instant, and
0≤U(t)≤ 1 (9)
where U(t) = 1 denotes an ideal network. Thus the goalof the resource allocation strategy is to ensure that U(t)→ 1as much as possible. Each of the sub-utility functions aredescribed in further detail below.
1) Sub-utility Function for Biased Transmissions, U1(t):At each transmission instant, a log of the past x transmissionslots was kept, where
x = 3n, (10)
and n is the number of nodes in the network. From there, theproportion of the number of transmission slots taken up bythe favoured node, Pf , may be calculated. Mathematically,
Pf =S f
x, (11)
where S f is the number of transmission slots taken up by thefavoured node.
Next, recalling that the favoured node is only allowed totransmit for 80% of the transmission slots and that an idealnetwork corresponds to a utility value equal to 1, the sub-utility function for Biased Transmissions may be defined as:
U1(t) = e−|Pf−0.8| (12)
Therefore, whenever the favoured node does not transmit80% of the time, U1(t)< 1.
2) Sub-utility Function for Fair Transmission, U2(t):Using the same log of the past x transmission slots mentionedin Section IV-A.1, the mean number of transmissions slotstaken up by each node, s = 1
n
n∑
i=1Si, is calculated and Si is the
number of transmission slots used by the i-th robot. Next,the mean squared error, MSE, and standard deviation, S.Dare calculated as shown:
2014 IEEE International Conference onAutonomous Robot Systems and Competitions (ICARSC)May 14-15, Espinho, Portugal
124

MSE =n
∑i=1
(Si− s)2
S.D =
√1
n−1MSE
(13)
Thus, the standard deviation gives a good measure ofthe fairness of the network. If S.D = 0, then the nodes aretransmitting fairly. On the other hand, if S.D 6= 0, then thereis some amount of unfairness in the network. In order toexpress the amount of fairness as the sub-utility function forthis transmission case, the S.D was treated as follows:
U2(t) = e−S.D (14)Hence, when the network is fair, U2(t) = 1. Otherwise,U2(t)< 1.B. Simulation Environment
The topology used for simulation was limited to a stringtopology, where nodes had to send data back to a server byhopping through other nodes along the string.C. Selection of Variables
Variable a was the first to be determined for various num-ber of nodes. It was selected by executing 500 transmissionslots under a Fair Transmission case and a ∈ [0.5,50]. Onceit was selected, the remaining two variables, ξIn jection andεincentive were selected by running 500 transmission slotsunder a Biased Transmission case for ξIn jection ∈ [5,150]and εincentive ∈ [1,125]. All selections were chosen based onthe outcomes that gave the highest utility. Table I gives thechosen values used in the algorithm during the experiments.
TABLE I: Table of Variables with Chosen Values for VariousNumber of Nodes
Number of Nodes(excl. Server) a Incentive
InjectionIncentiveDecrease
2 2.5 50 253 2 105 90
V. EXPERIMENTS & RESULTSThis section presents the experiments conducted to vali-
date the effectiveness of the resource allocation strategy. Theresults from the experiments will then be discussed.A. Experiments
Experiments for both Fair Transmission and Biased Trans-mission cases were both conducted with and without theresource allocation strategy in order to gauge the improve-ments made when the strategy was applied. In addition,each case was also tested with 2 and 3 nodes to gaugehow the strategy worked with an increased load. The globalbandwidth available remained constant, regardless of thenumber of nodes deployed.
1) Devices Used: Table II shows the devices used to fulfilthe various roles in the experiments. All of them had theros-rt-wmp node running in the user space and wereoperating at 2.462 GHz.
2) Placement of Nodes: Fig 4 shows the placement of thenodes. The nodes were placed in these positions such thatthey were forced to hop through each other. Each experimentwas then allowed to run for 3 minutes.
Liftx
xx
xNode R3
Node R2 Node R1
Server
Fig. 4: Placement of Nodes. Note that for a two node case,only the Server, R1 and R2 were used.
3) Node Configuration: The RT-WMP allows the priorityof nodes to be pre-configured before runtime. The followingconfigurations were conducted:• Fair Transmission with No Strategy
All the priorities of each node were set to be equal toeach other. No changes were made at runtime.
• Biased Transmission with No StrategyThe priority of the node furthest away from the serverwas configured to be higher than all other nodes. Nochanges were made at runtime.
• Fair and Biased Transmissions with Resource Allo-cation StrategyBefore the start of each experiment, all the prioritieswere configured to be equal to each other. At runtime,the priorities were adjusted by the strategy dynamically.
B. Measurement Statistics
A calculation of the Instantaneous Frames Per Second(IFPS) was done each time new images were received at theserver. The IFPS formula used was a simple moving averageof the K most recent images (K = 5 for our tests). In otherwords:
IFPS =
[∑K
i=1 tiK
]−1
[12] (15)
where ti represents the duration taken for the i-th image toarrive at the server after the (i−1)-th image. The result ofthis calculation gives an indication of the amount of networkresource allocated to a particular node at that point in time. Ahigher IFPS value experienced by a node represents a greateramount of network resource allocated to it at that instant totransmit its data payload. If a series of IFPS values wererecorded and observed, the spread of IFPS values also givean indication of the performance of the network. This willbe explained in detail in Section V-C.
C. Results
1) Fair Transmission: The results for fair transmissionsare as shown in Figs 5a and 5b.
Observe in Fig 5a that the RT-WMP alone was unable todeliver many images from the nodes to the server. However,with the resource allocation strategy incorporated, a sharpimprovement in the number of images received at the serverwas observed for the entire duration of the transmission,as depicted in Fig 5b. Furthermore, the resource allocationstrategy was actively attempting to allocate the networkbetween the two nodes as fairly as possible, evident in theperiodic breaks in transmission.
Comparing Figs 6a and 6b, a significant improvement inthe performance of the network is seen. When no strategy
2014 IEEE International Conference onAutonomous Robot Systems and Competitions (ICARSC)May 14-15, Espinho, Portugal
125

Server NodeR0
The server used was an Intel-based laptop running Linux Ubuntu 12.04 LTS. It utilises a built-in Ultimate N WiFi Link5300 network card from Intel Corp, capable of running IEEE 802.11b/g/n. The transmission power used was set at 15dBm,the maximum possible value. The server was configured to only receive image topics from all other nodes.
Transmitting NodeR1
This role was fulfilled by another Intel-based laptop with similar specifications to the server, except that the transmissionpower was set at 16dBm. The built-in camera was configured to capture images at a frame rate of 7.0 Hz. These were thensent to R0 as compressed JPEG images via ROS, taking up a bandwidth of approximately 20 KB/s.
Transmitting NodesR2 & R3
These two roles were fulfilled by the ARM-based E-pucks running a lean version of Linux Ubuntu 10.10 LTS. The WiFidongles used were configured to run in the IEEE 802.11b/g mode. The transmission power was set at 15±1.5dBm. EachE-puck had a Point Grey Firefly Camera configured to capture images at a frame rate of 7.5 Hz. These images were thensent as compressed JPEG images over ROS. The bandwidth taken up by these images was approximately 30 KB/s.
TABLE II: Nodes involved in the Experiments
0 30 60 90 120 150 180
R1
R2
Time (s)
Nodes
(a) No Strategy
0 30 60 90 120 150 180
R1
R2
Time (s)
Nodes
(b) With Strategy
Fig. 5: Traces of Images Received at Server (2 Nodes; FairTransmission)
Node R1 Node R20
2
4
6
8
10
Fra
me
s P
er
Se
co
nd
(a) No Strategy
Node R1 Node R20
2
4
6
8
10
Fra
me
s P
er
Se
co
nd
(b) With Strategy
Fig. 6: Boxplots of IFPS Values (2 Nodes; Fair Transmission)
was applied, the median IFPS values for R1 and R2 were0.5052 Hz and 0.5556 Hz respectively. However, with theresource allocation strategy applied, the median IFPS val-ues for R1 and R2 increased to 2.507 Hz and 1.137 Hzrespectively, a four-fold increase for R1 and an approximatetwo-fold increase for R2, hence exhibiting the effectivenessof the resource allocation strategy for fair transmissions.
2) Biased Transmissions: Fig 7a clearly shows that fora two node setup, configuring R2 to have the highest pri-ority throughout the whole transmission session effectivelyprevents R1 from transmitting after 45s. Fig 8a also showsa similar outcome for a three node setup, where R3 hasits priority set to be the highest in the network, while thepriorities of R2 and R1 were both set to be at the same level,but lower than that of R3. It is clear to conclude that withoutthe resource allocation strategy, a biased transmission willonly allow the favoured node to transmit and effectively halt
0 30 60 90 120 150 180
R1
R2
Time (s)
Nodes
(a) No Strategy
0 30 60 90 120 150 180
R1
R2
Time (s)
No
de
s
(b) With Strategy
Fig. 7: Trace of Images Received at Server (2 Nodes; BiasedTransmission)
0 30 60 90 120 150 180
R1
R2
R3
Time(s)
Nodes
(a) No Strategy
0 30 60 90 120 150 180
R1
R2
R3
Time (s)
Nodes
(b) With Strategy
Fig. 8: Trace of Images Received at Server (3 Nodes; BiasedTransmission)
the transmission of other nodes.On the other hand, when the resource allocation strategy
was applied, the favoured node was still allowed to transmitfor the bulk of the transmission period, while the other non-favoured nodes could still transmit periodically, though at ashorter frequency (Figs 7b and 8b) Thus, the strategy clearlyachieves its goal of allowing the other non-favoured nodesto transmit periodically.
Node R1 Node R20
5
10
15
20
25
30
Fra
mes P
er
Second
(a) 2 Nodes
Node R1 Node R2 Node R30
5
10
15
20
25
30
Fra
me
s P
er
Se
co
nd
(b) 3 Nodes
Fig. 9: Boxplots of IFPS Values (Biased Transmission)
From Fig 9a, for the two node setup, the median IFPSvalues for R1 and R2 were very close to each other at 8.517and 7.887 respectively. This indicated that the performanceof R1 was extremely similar to that of R2, even though R1had much fewer opportunities to transmit. Note that the largerrange of IFPS values seen in R1 is expected. Since it wasunable to transmit for significantly long periods of time, theserver reports a decreased IFPS value from R1. At the sametime, the data packets produced at R1 would be queued up.
2014 IEEE International Conference onAutonomous Robot Systems and Competitions (ICARSC)May 14-15, Espinho, Portugal
126

Once R1 was given the priority to transmit, these queuedup data packets were transmitted to the server as quickly aspossible, at a rate higher than the camera frame rate. Thus,with the sudden rush of images being received at the server,it reports larger IFPS values at those instants.
For the three node setup, the median IFPS values weremore varied (R1: 6.230, R2: 3.567, R3: 3.120) (Refer toFig 9b). In particular, considering that the number of imagesreceived from R1 at the server was the lowest, the medianIFPS value was found to be surprisingly higher than that ofR2 and R3. This may be due to the long time periods whenR1 was unable to transmit, at the intervals t ∈ [8,54] and t ∈[113,141]. These long time periods resulted in an extremelylong queue of packets in the node. During the extremely shorttime periods when R1 was allowed to transmit, the rapidarrival of packets at the server caused the IFPS values to beextremely high. As this transmission period was extremelyshort, there was insufficient time to clear the transmissionqueue at R1 and the data flow between R1 and the servercould not be reduced back to the normal rate. This accountsfor the higher median IFPS value in R1.
On the other hand, the median IFPS values of R2 andR3 are extremely similar. In fact, from Fig 8b, while R3,the favoured node, clearly took up the bulk of the time, R2appeared to transmit for an amount of time that was less,but close to that of R3. Indeed, one can observe quite alot of instances where R2 and R3 transmit simultaneously.This is due to how the RT-WMP handles different data flowswhen the network is not saturated. As expected, the RT-WMPallows the node with the highest priority data flow in a giveninstant (say, R3) to transmit. However, if the highest prioritydata flow does not saturate the bandwidth, such that thereis sufficient amount of bandwidth available to accommodatea second data stream of lower priority, then the RT-WMPwill allow this data stream to be transmitted simultaneously.Thus, this explains why there was a significant amount ofsimultaneous transmissions between R2 and R3, resulting insimilar median IFPS values and, hence, similar performancesfor these two nodes.
VI. CONCLUSION & FUTURE WORK
This paper has presented a new auction-based resourceallocation strategy that runs in conjunction with the RT-WMP. By default, it will attempt to allocate the networkfairly among the nodes in the network, but if the userchooses to scrutinise a particular node instead, the strategyis able to meet that request. It was tested in typical indoorenvironments to gauge its performance, which was comparedto the cases whereby no strategy was used (ie an uncontrollednetwork). A different number of nodes was used to gaugehow well the strategy worked under different loads. Theresults derived from the experiments are fourth-coming.It showed that under environments with significant WiFiinterference, the RT-WMP alone was unable to performwell. However, with assistance from the resource allocationstrategy dynamically adjusting the transmission priorities ofeach node, the limited bandwidth was well-optimised for
the nodes to transmit images at a reasonable IFPS value.The resource allocation strategy has also met its two-foldaim of allocating the network resource to all nodes as fairlyas possible, as well as letting other non-favoured nodestransmit periodically, at a lower frequency, when a biasedtransmission is taking place.
Future development on this contribution include moreperformance evaluations that measure the performance of thealgorithm when the number of nodes used increases gradu-ally, as well as determining how the distance between nodesaffect the effectiveness of the nodes. The results derived canaid in the development of optimisation algorithms that areable to tune the variables in the strategy according to thenetwork topology, the number of nodes in the network andthe amount of interference experienced, leading to increasedrobustness of this resource allocation strategy.
REFERENCES
[1] R. G. Smith, “The contract net protocol: High-level communicationand control in a distributed problem solver,” Computers, IEEE Trans-actions on, vol. C-29, no. 12, pp. 1104–1113, 1980.
[2] B. Gerkey and M. Mataric, “Sold!: auction methods for multirobot co-ordination,” Robotics and Automation, IEEE Transactions on, vol. 18,no. 5, pp. 758–768, 2002.
[3] M. B. Dias and A. T. Stentz, “Traderbots: A market-based approachfor resource, role, and task allocation in multirobot coordination,”Robotics Institute, Pittsburgh, PA, Tech. Rep. CMU-RI -TR-03-19,August 2003.
[4] W. Vickrey, “Counterspeculation, auctions, and competitive sealedtenders,” The Journal of Finance, vol. 16, no. 1, pp. 8–37, 1961. [Online]. Available: http://dx.doi.org/10.1111/j.1540-6261.1961.tb02789.x
[5] M. G. Lagoudakis, E. Markakis, D. Kempe, P. Keskinocak, A. Kley-wegt, S. Koenig, C. Tovey, A. Meyerson, and S. Jain, “Auction-basedmulti-robot routing,” in Proceedings of Robotics: Science and Systems,Cambridge, USA, June 2005.
[6] L. Wang, M. Liu, and M. Q.-H. Meng, “Fair subdivision of multi-robottasks,” in Proceedings of the 2014 IEEE International Conference onRobotics and Automation, 2014. (ICRA 2014)., 2014.
[7] L. Liu and D. Shell, “Optimal market-based multi-robot task allo-cation via strategic pricing,” in 2013 Robotics: Science and SystemsConference (RSS), June 2013.
[8] D. Tardioli and J. Villarroel, “Real time communications over 802.11:Rt-wmp,” in Mobile Adhoc and Sensor Systems, 2007. MASS 2007.IEEE Internatonal Conference on, 2007, pp. 1–11.
[9] M. Tan, M. Liu, and R. Siegwart, “An Experimental Evaluationof the RT-WMP Routing Protocol in an Indoor Environment,” inInternational Conference on Information and Automation 2013 (ICIA2013). IEEE, 2013.
[10] D. H. J. Epema, “Decay-usage scheduling in multiprocessors,” ACMTrans. Comput. Syst., vol. 16, no. 4, pp. 367–415, Nov. 1998.[Online]. Available: http://doi.acm.org/10.1145/292523.292535
[11] K. Aida, “Effect of job size characteristics on job schedulingperformance,” in Job Scheduling Strategies for Parallel Processing,ser. Lecture Notes in Computer Science, D. Feitelson and L. Rudolph,Eds. Springer Berlin Heidelberg, 2000, vol. 1911, pp. 1–17. [Online].Available: http://dx.doi.org/10.1007/3-540-39997-6_1
[12] R. T. Apteker, J. A. Fisher, V. S. Kisimov, and H. Neishlos,“Video acceptability and frame rate,” IEEE MultiMedia,vol. 2, no. 3, pp. 32–40, July 1995. [Online]. Available:http://dx.doi.org/10.1109/93.410510
2014 IEEE International Conference onAutonomous Robot Systems and Competitions (ICARSC)May 14-15, Espinho, Portugal
127