A Parallel Genetic Algorithm-Based TSK-Fuzzy System for Dynamic Car-Following Modeling
15
European Journal of Scientific Research ISSN 1450-216X Vol.28 No.4 (2009), pp.627-641 © EuroJournals Publishing, Inc. 2009 http://www.eurojournals.com/ejsr.htm A Parallel Genetic Algorithm-Based TSK-Fuzzy System for Dynamic Car-Following Modeling Muhammad Ridwan Andi Purnomo Department of Mechanical and Materials Engineering, Faculty of Engineering and Built Environment. Universiti Kebangsaan Malaysia 43600 Bangi, Selangor, Malaysia E-mail: [email protected] Dzuraidah Abdul Wahab Department of Mechanical and Materials Engineering, Faculty of Engineering and Built Environment. Universiti Kebangsaan Malaysia 43600 Bangi, Selangor, Malaysia Azmi Hassan Department of Mechanical and Materials Engineering, Faculty of Engineering and Built Environment. Universiti Kebangsaan Malaysia 43600 Bangi, Selangor, Malaysia Riza Atiq Rahmat Department of Civil and Structural Engineering, Faculty of Engineering and Built Environment. Universiti Kebangsaan Malaysia 43600 Bangi, Selangor, Malaysia Abstract This paper presents the application of Parallel Genetic Algorithm (PGA)-based Takagi Sugeno Kang (TSK)-Fuzzy approach for dynamic car-following modeling in the traffic simulation software. It differs from the usual car-following model significantly as the proposed model provides a more dynamic car movement and realistic headway by considering the driver progressive level factor. These two advantages could make further traffic analysis become more accurate. The proposed model is used for the tire-road slippage index determination which influences the car’s speed. Since the car interact with each other on the road and the driver progressive level is different, three interaction variables, that are current car speed, distance to the car ahead and driver progressive level, are defined and an indication of their influence on the tire-road slippage index is analysed. PGA is included in the TSK-Fuzzy system to determine the optimum parameters in the Fuzzy sets and Fuzzy rules so as to improve the accuracy of the tire-road slippage index estimation. A set of data in a size of 38 x 4 and 22 x 4 were used for training and testing the performance of the model. The study shows that TSK-Fuzzy system combined with PGA is effective and accurate in estimating the tire-road slippage index. Keywords: Car-following model, PGA, TSK-Fuzzy system, tire-road slippage index
-
Upload
independent -
Category
Documents
-
view
0 -
download
0
Transcript of A Parallel Genetic Algorithm-Based TSK-Fuzzy System for Dynamic Car-Following Modeling

European Journal of Scientific Research ISSN 1450-216X Vol.28 No.4 (2009), pp.627-641 © EuroJournals Publishing, Inc. 2009 http://www.eurojournals.com/ejsr.htm
A Parallel Genetic Algorithm-Based TSK-Fuzzy System for
Dynamic Car-Following Modeling
Muhammad Ridwan Andi Purnomo Department of Mechanical and Materials Engineering, Faculty of Engineering
and Built Environment. Universiti Kebangsaan Malaysia 43600 Bangi, Selangor, Malaysia E-mail: [email protected]
Dzuraidah Abdul Wahab
Department of Mechanical and Materials Engineering, Faculty of Engineering and Built Environment. Universiti Kebangsaan Malaysia
43600 Bangi, Selangor, Malaysia
Azmi Hassan Department of Mechanical and Materials Engineering, Faculty of Engineering
and Built Environment. Universiti Kebangsaan Malaysia 43600 Bangi, Selangor, Malaysia
Riza Atiq Rahmat
Department of Civil and Structural Engineering, Faculty of Engineering and Built Environment. Universiti Kebangsaan Malaysia
43600 Bangi, Selangor, Malaysia
Abstract
This paper presents the application of Parallel Genetic Algorithm (PGA)-based Takagi Sugeno Kang (TSK)-Fuzzy approach for dynamic car-following modeling in the traffic simulation software. It differs from the usual car-following model significantly as the proposed model provides a more dynamic car movement and realistic headway by considering the driver progressive level factor. These two advantages could make further traffic analysis become more accurate. The proposed model is used for the tire-road slippage index determination which influences the car’s speed. Since the car interact with each other on the road and the driver progressive level is different, three interaction variables, that are current car speed, distance to the car ahead and driver progressive level, are defined and an indication of their influence on the tire-road slippage index is analysed. PGA is included in the TSK-Fuzzy system to determine the optimum parameters in the Fuzzy sets and Fuzzy rules so as to improve the accuracy of the tire-road slippage index estimation. A set of data in a size of 38 x 4 and 22 x 4 were used for training and testing the performance of the model. The study shows that TSK-Fuzzy system combined with PGA is effective and accurate in estimating the tire-road slippage index. Keywords: Car-following model, PGA, TSK-Fuzzy system, tire-road slippage index

A Parallel Genetic Algorithm-Based TSK-Fuzzy System for Dynamic Car-Following Modeling 628
1. Introduction Nowadays, traffic simulation system plays an important role in the traffic engineering field. The last 20 years have been characterised by a dramatic increased in the use of own transport (Nurdden et al., 2007). The ever increasing car population on the road causes the traffic system to become more complicated to be analysed. The using of the traffic simulation system to analyse the traffic system is much more efficient than field analysis (Liu et al., 2006; Hidas, 2005). There are two types of the traffic simulation, (a) macroscopic traffic simulation, which models a group of vehicle together in a platoon, and (b) microscopic traffic simulation, which models every vehicle individually. The object of this research is focused on microscopic traffic simulation.
Microscopic traffic simulation concepts differ significantly from macroscopic traffic simulation concepts. In the microscopic traffic simulation, a comprehensive real time visual display of every car illustrates traffic condition in an easily understandable manner to both expert and lay user. Microscopic traffic simulation could be used to describe the behaviour of individual decision maker (Ettema et al. 2005). By modelling the interaction between the cars to each other through urban network junction, the simulation can provide high accuracy data about travelling time, acceleration time, headway and any other data which are related to the traffic timing analysis.
One of the primary components in the microscopic traffic simulation is cars movement model which is well known as car-following model (Lei et al. 2005). The model is used to manage the movement of an individual car relative to the car ahead. The car-following model is also one of the important evaluation tools for intelligent transportation system strategies since the 1990s (Ge et al., 2008). Typically, there are three rules in the car-following model, which are the car is not allowed to make lane changes (Gong et al. 2008), not allowed to overtake the car ahead and will accelerate or brake with some prescribed manner (Jamison and McCartney, 2007). These rules could be explained in the following section.
In the microscopic traffic simulation, usually each car has a prescribed route. In order to simplify the simulation computation and also to deal with the route, the car would move along the prescribed lane, without making any lane changes. Also, it is rarely observed that a car overtakes another car ahead in the busy road and foremost when the cars approach a signalised junction. Hence, the overtaking would have less impact to the traffic analysis. The cars in the simulation will move along the road following some prescribed manner. The car would be accelerated when it is far from the car ahead, and would be braked when it is close to the car ahead.
In the existing traditional car-following model, all cars would be managed by using the same rule. It will make the car movement seemed monotone. Moreover it will lead to uniform headways for each car when they stop in front of the red light at some signalised junction. In the real traffic condition, each car has different behaviour. One of the factor that influences the cars’ behaviour is drivers’ characteristic (Co and Wu 2008). In the analysis, the driver characteristic could be instantiated by using driver progressive level. The progressive driver usually drives the car with relatively high speed and will brake the car when very close to the car ahead. The car will have a short headway to the car ahead. The moderate progressive driver usually drives the car with a medium speed and will stop the car relatively far from the car ahead, and then the headway to the car ahead is relatively far. In the micro traffic simulation system, the driver characteristic must be considered in the car-following model in order to get realistic traffic flow.
In this study, the car-following model for microscopic traffic simulation would be developed using TSK-Fuzzy system combined with PGA. It is well known that Fuzzy system is easier used to model complex system compared to mathematical model. However, recently several researches have shown that there is a need to combine Fuzzy logic with mathematical model in order to increase the modelling accuracy. TSK-Fuzzy system is one of the types of Fuzzy system that combines linguistic variables and mathematical model in the Fuzzy rules. In TSK-Fuzzy system, the antecedent of the Fuzzy rules usually formed using linguistic variables and the consequent of the Fuzzy rules is formed using linear mathematical model. Hence, there will be a lot of parameters in the Fuzzy rules which need to be adjusted so that the output of the model fits the desired output. Previously, there have been

629 Muhammad Ridwan Andi Purnomo, Dzuraidah Abdul Wahab, Azmi Hassan and Riza Atiq Rahmat
no formal rules to determine these parameters. Moreover, PGA would be utilised to adjust the parameter in the Fuzzy set and also the parameters value in the consequent part of the Fuzzy rules. PGA is similar to the standard GA. The difference is, PGA uses two chromosome populations which might have different genetic operation or different parameter setting to enlarge the searching space. This will make the study different from all previous research in the TSK-Fuzzy system field. 2. Literatures Review Since several years ago, the car-following model has become one of the interesting topics in the traffic system analysis. There are several recent studies in the car-following model that have been conducted by previous researcher from different view angle. Usually, the models are developed using mathematical model or Artificial Intelligent (AI) techniques. Recent issues on the application of TSK-Fuzzy system in complex system modelling are presented in the following paragraph.
Orosz, Krauskopf and Wilson (2005) investigated the application of dynamical system techniques to determine the optimal velocity of some vehicles with consideration on reaction-time delay of the driver. The model was developed to manage highway traffic. In that research, identical cars are modelled as discrete entities that move in continuous time and one dimensional space in a circular single-lane road. The traffic pattern is considered as the dynamic of a single vehicle as it drives repeatedly around the road, and a traffic jam could be modelled as a stop-and-go wave. An analytical mathematical model have been proposed and the research is indicates that the proposed model could be used to manage the optimum velocity up to 17 cars.
Shunping and Baohua (2007) investigated the development of car-following model by using cloud model theory. The cloud model theory works similar to the Fuzzy Logic that has 3 steps; determination of input data membership value, determination of fire strength of every rules and rules inference. It could be used to capture the characteristic of the car-following phenomenon that might contain uncertainties. The proposed model has 2 data input that are relative velocity; which is the function of current speed of two nearby sequenced cars, and relative time headway; which is the function of the headway of two nearby sequenced cars and the relative velocity. The output of the proposed model is acceleration level of a car which is divided into three subsets; accelerate, uniform velocity and decelerate. The study indicates that the proposed model could be used to accommodate the uncertainty in the driver behaviour.
Instead of mathematical model, the AI technique was getting attention in the car-following modelling. Chakroborty and Kikuchi (2003) developed Fuzzy rule based inference system for car-following model. In that research, the Fuzzy rule based inference system is represented by a Neural Network (NN) technique. The weight values of the network correspond to the parameters that control the shape and location of each membership function and would be adjusted using back propagation mechanism which refer to a set of input-output data. Two kinds of input data were used, which are headway between 2 cars and the speed of each car. The output is the action of the following car, which is accelerated or decelerated. The research shows that the adjusted Fuzzy rule based inference system has better performance in data pattern recognition than the normal system.
Usually Fuzzy Logic is developed by using linguistic variables, but there is a type of Fuzzy Logic that is developed by combining linguistic variables and mathematical model, called TSK-Fuzzy system. Recently, this type of Fuzzy system has been demonstrated as a successful tool in various areas such as pattern recognition, control system and complex system modelling. In the TSK-Fuzzy system, the antecedent of the rule is formed using linguistic variables but the consequent is formed using mathematical model instead of linguistic variables. Successful application of TSK-Fuzzy system in several areas would be presented in the following section.

A Parallel Genetic Algorithm-Based TSK-Fuzzy System for Dynamic Car-Following Modeling 630
Lin (2004) investigated the application of GA-based Neural Fuzzy System (GA-NFS) for temperature control. The NFS was developed based on TSK-Fuzzy system in the form of multi layer Neural Network system. The first layer was used to capture the input data while the second layer was used to convert the input data into Fuzzy membership value. Then, the output of the second layer would be analysed using Fuzzy rules that have mathematical model in their consequent part in third and fourth layer. The last layer was used to aggregate the output in order to get a single final output. The GA was employed to adjust the precondition parameters in the Fuzzy rules while the parameters in the consequent part were estimated using Least Square Estimation method. The research shows that the GA-NFS has superior performance compared to a PID control system.
Chang and Liu (2008) showed the successful application of TSK-Fuzzy system for stock price prediction. In that research, K-means clustering technique was employed to cluster the set of input-output data and generate the Fuzzy rules. After the Fuzzy rules were generated then the parameters in the consequent part were optimised using Simulated Annealing algorithm. The research shows that the proposed TSK-Fuzzy system has better performance for stock price prediction than traditional forecasting methods.
Juang and Lo (2008) investigated the application of two phase swarm system to optimise the structure and parameters value of zero order TSK-Fuzzy system. The first phase of the swarm system consists of online clustering-aided ant colony algorithm to determine the number of Fuzzy rules. The second phase, the particle swarm system is utilised to optimise the parameters value in the consequent of the Fuzzy rules. The proposed system was tested to recognise the pattern of some nonlinear systems and also compared to the other control systems in order to know its performance. The research showed that the proposed system could be used to recognise the nonlinear systems and also has superior performance than the other control systems.
Lin (2008) introduced the immune-based particle swarm optimisation system as the learning algorithm for TSK-Fuzzy system. The main issue in using the learning system is mutation improvement in the immune system. The system utilised the advantages of particle swarm system to improve the mutation mechanism so that the immune system could avoid local optimisation trapping. In this research, the number of Fuzzy rules was determined based on self clustering algorithm. The proposed learning system will then be used to optimise the free parameters value in the Fuzzy rules which refers to some input-output data set. The proposed TSK-Fuzzy system was tested using chaotic time series problem and skin colour detection problem and it demonstrated good performance to solve the problems.
Based on the review above, it could be concluded that the car-following model is one of the important module that must be considered in traffic analysis. Car-following model is a dynamic system and TSK-Fuzzy system has potential to be used in its development. The important issues in the TSK-Fuzzy system are the Fuzzy rules determination and the optimisation of parameters in the Fuzzy sets and Fuzzy rules. In this research, the number of Fuzzy rules is totally determined in advance and the optimisation of the parameters in the Fuzzy sets and Fuzzy rules would be conducted using PGA. 3. Model Development 3.1. TSK-Fuzzy System
This section describes the development of the TSK-Fuzzy system. In order to capture the expert knowledge, the proposed TSK-Fuzzy system uses linguistic variables in the antecedent part while the consequent part is formed using linear model of the input variables. In this research, the PGA-based TSK-Fuzzy system is used as a control system to determine the tire-road slippage index of a car (si) in a car-following model with consideration on three input variables that are current car speed (cs), distance to the car ahead (d) and driver progressive level (pl). Lower tire-road slippage index will cause the car speed to reduce and vice versa. The model will be embedded in the microscopic traffic simulation to manage car objects in order to get dynamic car objects movement and realistic headway

631 Muhammad Ridwan Andi Purnomo, Dzuraidah Abdul Wahab, Azmi Hassan and Riza Atiq Rahmat
when a car stopped behind another car in some signalised junctions. In the developed car-following model, the tire-road slippage index is used to control the current car speed from time to time with the following formula:
ttt sicscs ×= −12.1 (Model 1) In Model 1, a constant 1.2 is used to enable a car to move faster from time to time. After the car
is totally stopped, or the current car speed is limit to zero, then the car will be run with some initial speed.
In the proposed TSK-Fuzzy system, if rth rule is denoted by Rr then the Fuzzy rule can be described generally as shown in Model 2.
Rr ( )pldcsfsiPplDdCcs ,, is THEN ~ is AND ~ is AND ~ is IF (Model 2) where DC ~,~ and P~ are Fuzzy sets on universe of discourses cs, d and pl respectively.
All of the input variables are represented using triangle Fuzzy sets. The Fuzzy sets for each variable are shown in Figure 1. In that figure, the value of (a1, b1, c1), (a2, b2, c2) and (a3, b3, c3) are initialised with some values and are further optimised using PGA.
Figure 1: Fuzzy set for the input variables
In this study, the Fuzzy rules are determined based on a full combination of the input variables. Hence, there will be 27 (33) Fuzzy rules. Basically, there are two types of Fuzzy set operation that are usually used in the antecedent rule, which are ‘AND’ and ‘OR’. Mathematically, the ‘AND’ operator can be realised using ‘Min’ or ‘Product’ operation while ‘OR’ can be realised using ‘Max’ or ‘Algebraic sum’ operator. In this research, all of the antecedent Fuzzy rules are using ‘AND’ operator and ‘Product’ operator is applied instead of ‘Min’ operator to avoid monotonic result. In the consequent rule, there will be 108 parameters (each rule has 3 parameters and 1 constant value; hence, there will be 4 * 27 = 108 parameters) and all of the parameters are initialised using some small decimal number (ex: 0.1). These values are then optimised using PGA.
The crisp output of the proposed TSK-Fuzzy system is obtained using weighted average defuzzification method. Using this method, the output of each Fuzzy rules will be considered proportionally with their contribution to the final output. The formula for this method is shown in Model 3.

A Parallel Genetic Algorithm-Based TSK-Fuzzy System for Dynamic Car-Following Modeling 632
Si = ∑
∑ ⋅
=
=27
1
27
1
rr
rrr si
μ
μ (Model 3)
where rμ is the fire strength of rth rules. The schematic of the proposed TSK-Fuzzy system process is shown in Figure 2. 3.2. PGA
In the proposed TSK-Fuzzy system, there are 9 parameters in the Fuzzy sets and 108 parameters in the consequent Fuzzy rules. The proposed system is used to recognise an input-output data set that consists of interaction between cs, d, pl and its influence to the si. It means that the proposed TSK-Fuzzy system is a supervised system. Therefore, all of the parameter values need to be adjusted so that the output of the system fits the desired output. This problem could be viewed as an optimisation problem with an objective function of minimising the deviation between the model’s output and the desired output by changing the parameters value. Since there are a lot of parameter values to be searched, the optimisation problem would be solved using PGA instead of the standard GA. In the PGA, there are two chromosomes population in parallel connection. The aim of using parallel chromosome population is to enlarge the solution’s space explorer. Hence, if there are a lot of parameter values that need to be searched then PGA will have a bigger possibility of finding the optimum solution. In this PGA, each chromosome population has similar encoding method but has different genetic operations or different parameter settings in the genetic operation.

633 Muhammad Ridwan Andi Purnomo, Dzuraidah Abdul Wahab, Azmi Hassan and Riza Atiq Rahmat
Figure 2: Schematic of Proposed TSK-Fuzzy System Process
3.2.1. Chromosome Representation The parameter values to be found are in the form of real numbers so that the chromosome populations are formed using real number encoding method. A chromosome will consist of 2 genes groups. The first group consists of 9 genes that is used to represent the parameter values in the Fuzzy set while the second group consists of 108 genes that is used to represent the parameter values in the consequent of
A Parallel Genetic Algorithm-Based TSK-Fuzzy System for Dynamic Car-Following Modeling 634
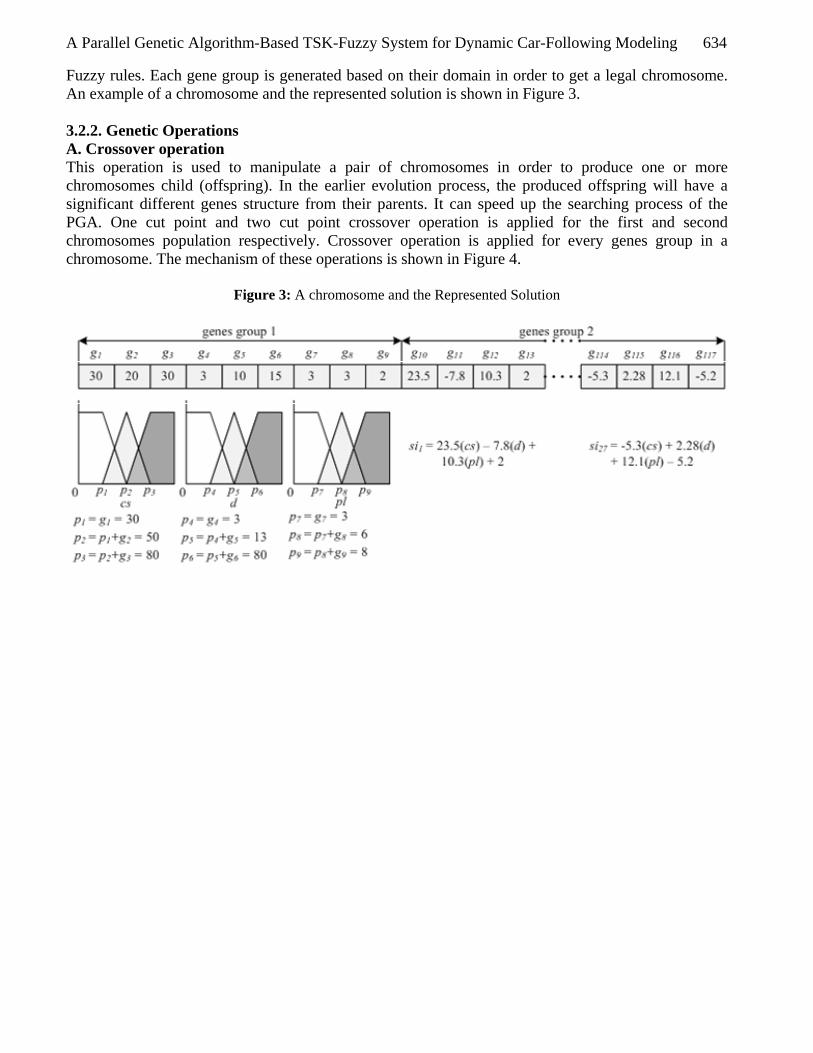
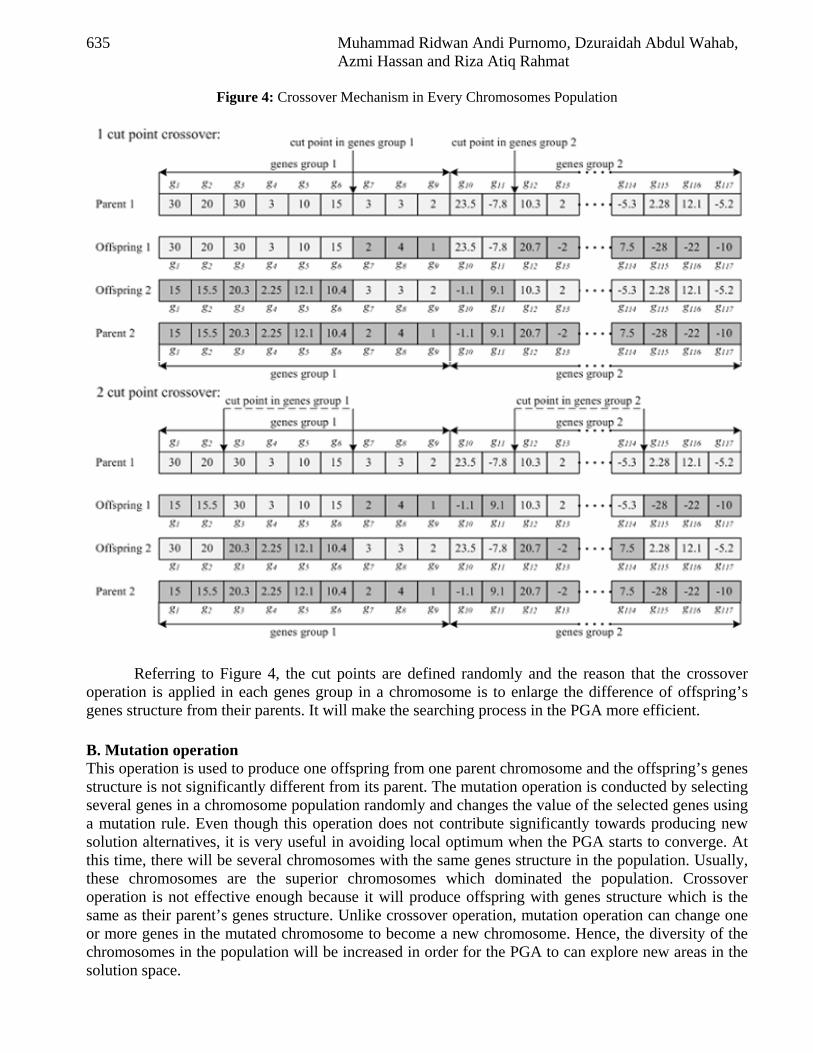
Fuzzy rules. Each gene group is generated based on their domain in order to get a legal chromosome. An example of a chromosome and the represented solution is shown in Figure 3. 3.2.2. Genetic Operations A. Crossover operation This operation is used to manipulate a pair of chromosomes in order to produce one or more chromosomes child (offspring). In the earlier evolution process, the produced offspring will have a significant different genes structure from their parents. It can speed up the searching process of the PGA. One cut point and two cut point crossover operation is applied for the first and second chromosomes population respectively. Crossover operation is applied for every genes group in a chromosome. The mechanism of these operations is shown in Figure 4.
Figure 3: A chromosome and the Represented Solution
635 Muhammad Ridwan Andi Purnomo, Dzuraidah Abdul Wahab, Azmi Hassan and Riza Atiq Rahmat
Figure 4: Crossover Mechanism in Every Chromosomes Population
Referring to Figure 4, the cut points are defined randomly and the reason that the crossover operation is applied in each genes group in a chromosome is to enlarge the difference of offspring’s genes structure from their parents. It will make the searching process in the PGA more efficient. B. Mutation operation This operation is used to produce one offspring from one parent chromosome and the offspring’s genes structure is not significantly different from its parent. The mutation operation is conducted by selecting several genes in a chromosome population randomly and changes the value of the selected genes using a mutation rule. Even though this operation does not contribute significantly towards producing new solution alternatives, it is very useful in avoiding local optimum when the PGA starts to converge. At this time, there will be several chromosomes with the same genes structure in the population. Usually, these chromosomes are the superior chromosomes which dominated the population. Crossover operation is not effective enough because it will produce offspring with genes structure which is the same as their parent’s genes structure. Unlike crossover operation, mutation operation can change one or more genes in the mutated chromosome to become a new chromosome. Hence, the diversity of the chromosomes in the population will be increased in order for the PGA to can explore new areas in the solution space.

A Parallel Genetic Algorithm-Based TSK-Fuzzy System for Dynamic Car-Following Modeling 636
In each chromosome population in the PGA, several genes are selected randomly to be mutated. The selection and mutation rule in every chromosomes population are conducted using the same method but with different mutation rate. The selected genes to be mutated are changed based on Model 4.
( )
( ) ( )( )
( )⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
⋅⋅=
=
⎪⎪⎩
⎪⎪⎨
⎧
⎟⎠⎞
⎜⎝⎛ ⋅−⋅
=⋅
== −
otherwiseddnRandbetwee
g
groupgeneifotherwise
gdnRandbetwee
iifdnRandbetwee
gg
iii
ii
i
i
i
,100
100max;100min
1,,
100100100max,0
7,4,1,100
100max,0
1' (Model 4)
where : gi’ = new gene value after mutated gi = old gene to be mutated i = position index of gene in the chromosome min di = minimum limit of the domain for gene i max di = maximum limit of the domain for gene i
3.2.3. Fitness Model Like the standard GA, the PGA is also ‘blind’ and does not know the faced problem. The one and only information that are used to navigate the PGA in solution searching process is fitness value; hence this model must be determined thoroughly. In this research, the aim of using PGA is to adjust the parameter values in the TSK-Fuzzy system so that the model’s output could fit the desired output. Therefore, the objective of the PGA is to minimise the deviation between model’s output and the desired output.
There are several parameters that could be used to measure the deviation value, such as Sum of Absolute Error (SAE), Mean of Absolute Error (MAE), Sum of Squared Error (SSE) and Mean of Squared Error (MSE). In this research the MSE parameter is used for that purpose, and the objective of the PGA is minimising the MSE value. In the PGA, the concept in searching the solution is maintaining a chromosome with the highest fitness until the end of generation. This concept is similar to the maximisation case in the optimisation field. Hence, the objective of the PGA must be modified to be a maximisation function as shown in Model 5.
Fitnessc = cMSE
1 (Model 5)
where : Fitnessc = fitness value of chromosome c MSEc = MSE value of chromosome c.
3.2.4. Best Chromosome Sharing Operations In the standard GA, there is some operation that is sometimes applied, called the elitism operation. In this operation, the best chromosome in every generation is copied directly (without treatment with any genetic operation) to the next generation. This operation is used to ensure that the best chromosome in each generation has at least the same fitness value as the best chromosome in the previous generation. In the PGA, the best chromosome sharing operation is introduced. This operation adopts the concept of elitism operation. The best chromosome in each chromosomes population, if they have different fitness value, will be shared by inserting it to the other chromosomes population. After rearrangement, each chromosomes population are sorted before being treated with genetic operation in the next generation. The aim of this operation is to ensure that the best chromosome so far can be maintained in each chromosomes population and to reduce the performance gap between chromosomes populations. The mechanism of the best chromosome sharing operation is shown in Figure 5.

637 Muhammad Ridwan Andi Purnomo, Dzuraidah Abdul Wahab, Azmi Hassan and Riza Atiq Rahmat
Figure 5: Best Chromosomes Sharing Mechanism
3.2.5. Fitness Scaling A chromosome is evaluated based on its fitness value. Chromosome with higher fitness value has higher possibility to be reproduced in the next generation compared to the chromosome with lower fitness value. It can cause “super chromosome” dominating the chromosomes population and PGA will be trapped in local optimum condition. To avoid this condition, a fitness scaling is required. The aim of the fitness scaling is to reduce the gap between fitness values of the “super chromosome” and the others with still considering their ranking position. Therefore, all of the chromosomes will have almost similar probability to be selected and reproduced so that the diversity of the chromosomes in every generation can be controlled.
At earlier generation, PGA needs high diversity of chromosomes to avoid premature convergent. However, during iteration the diversity of chromosomes must be reduced gradually to enable PGA to focus on improving the best solution so far and convergent point can be achieved. Technically, it means that fitness scaling model must be developed by considering the index of generation during the searching process. Based on the reasons above, the proposed fitness scaling is shown in Model 6.
Fitness(c)’ = Fitness(c) - ( ) ( )( )( )⎟⎟⎠
⎞⎜⎜⎝
⎛−⎟
⎠⎞
⎜⎝⎛ − cFitnessMaxcFitnessx
Ggn1 (Model 6)
where : Fitness(c)’ = fitness value of chromosome c after scaled Fitness(c) = fitness value of chromosome c before scaled gn = generation index during searching process G = number of generation as stopping condition.

A Parallel Genetic Algorithm-Based TSK-Fuzzy System for Dynamic Car-Following Modeling 638
4. Data Collecting and Processing A set of input-output data which consists of data about cs, d, pl as input data and si as output data are experimentally collected from a 3D micro traffic simulator software, that has been developed at the National University of Malaysia. The experiment was conducted by using two car objects. A car, in the stopped condition, was placed in front of some signalised junction and is called the static car. The other car, called the dynamic car, was placed slightly far behind the static car and will be run with some predetermined discrete cs, d, pl and si data. This data has been determined in advance by trial and error. The dynamic car will run with a constant speed when the distance to the static car is relatively far. Once the distance reached the maximum limit of the d domain (in this case, it was set to 25 m), then the dynamic car’s speed will be controlled with reference to the input-output data. The result was evaluated visually through computer monitor. If the dynamic car can run smoothly and stop behind the static car with reasonable headway then the data will be saved for further analysis. On the other hand, if the dynamic car can not run smoothly, or has unreasonable headway to the static car, or crashing the static car, then the input-output data will be manually modified until satisfied condition is achieved.
After the data was collected, then a 60 x 4 data was used as sample data. The sample data will then be divided into two groups, 38 x 4 data used as training data and the rest (22 x 4 data) used as testing data. The PGA is ran to optimise the parameters value in TSK Fuzzy system with parameters value of crossover rate in chromosomes population 1 (2), mutation rate in chromosomes population 1 (2) and the number of generation are 0.45 (0.5), 0.05 (0.1) and 500 respectively. After optimisation, the formed TSK system was used to identify the pattern of the testing data. In this research, comparison study was also carried out. The parameters value in the TSK-Fuzzy system was also optimised using standard GA. The study shows that optimisation using PGA has superior accuracy, indicated by lower MSE value, compared to optimisation using standard GA. Figure 6 and Figure 7 show the comparison between desired and model output of the training and testing data respectively. Figure 8 shows the searcing process of the PGA and the optimised Fuzzy sets for every variable in the TSK system is shown in Figure 9.
Figure 6: Desired and Model Output Comparison of Training Data

639 Muhammad Ridwan Andi Purnomo, Dzuraidah Abdul Wahab, Azmi Hassan and Riza Atiq Rahmat
Figure 7: Desired and Model Output Comparison of Testing Data
Figure 8: Searching Process of PGA
Searching Process of PGA
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
1 50 99 148 197 246 295 344 393 442 491
Generation
MSE
Best Fitness
Average Fitness
A Parallel Genetic Algorithm-Based TSK-Fuzzy System for Dynamic Car-Following Modeling 640
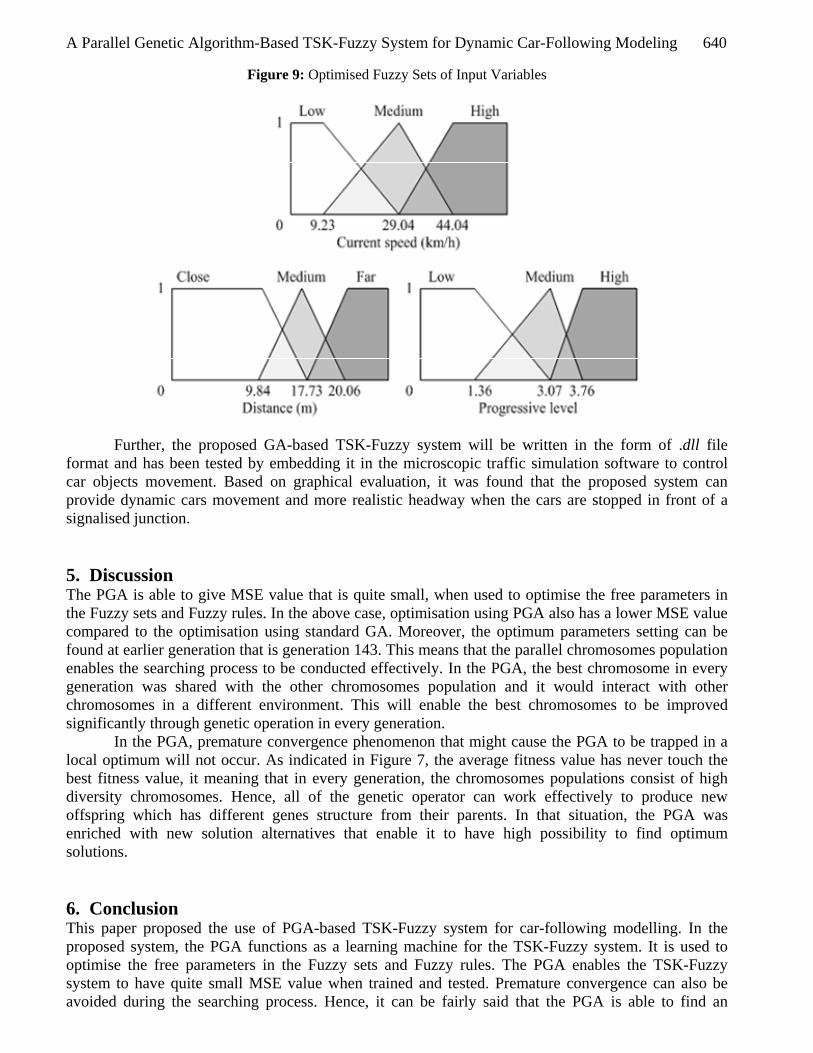
Figure 9: Optimised Fuzzy Sets of Input Variables
Further, the proposed GA-based TSK-Fuzzy system will be written in the form of .dll file format and has been tested by embedding it in the microscopic traffic simulation software to control car objects movement. Based on graphical evaluation, it was found that the proposed system can provide dynamic cars movement and more realistic headway when the cars are stopped in front of a signalised junction. 5. Discussion The PGA is able to give MSE value that is quite small, when used to optimise the free parameters in the Fuzzy sets and Fuzzy rules. In the above case, optimisation using PGA also has a lower MSE value compared to the optimisation using standard GA. Moreover, the optimum parameters setting can be found at earlier generation that is generation 143. This means that the parallel chromosomes population enables the searching process to be conducted effectively. In the PGA, the best chromosome in every generation was shared with the other chromosomes population and it would interact with other chromosomes in a different environment. This will enable the best chromosomes to be improved significantly through genetic operation in every generation.
In the PGA, premature convergence phenomenon that might cause the PGA to be trapped in a local optimum will not occur. As indicated in Figure 7, the average fitness value has never touch the best fitness value, it meaning that in every generation, the chromosomes populations consist of high diversity chromosomes. Hence, all of the genetic operator can work effectively to produce new offspring which has different genes structure from their parents. In that situation, the PGA was enriched with new solution alternatives that enable it to have high possibility to find optimum solutions. 6. Conclusion This paper proposed the use of PGA-based TSK-Fuzzy system for car-following modelling. In the proposed system, the PGA functions as a learning machine for the TSK-Fuzzy system. It is used to optimise the free parameters in the Fuzzy sets and Fuzzy rules. The PGA enables the TSK-Fuzzy system to have quite small MSE value when trained and tested. Premature convergence can also be avoided during the searching process. Hence, it can be fairly said that the PGA is able to find an

641 Muhammad Ridwan Andi Purnomo, Dzuraidah Abdul Wahab, Azmi Hassan and Riza Atiq Rahmat
optimum solution for the above case. The developed car-following model has also been tested by embedding it in the 3D microscopic traffic simulation software and from visual inspection, it was ascertained that it enables dynamic car objects movement and realistic headway. References [1] Chakroborty, P. and Kikuchi, S. 2003. Calibrating the membership functions of the fuzzy
inference system: instantiated by car-following data. Transportation Research Part C. 11, pp. 91-119.
[2] Chang, P.C. and Liu, C.H. 2008. A TSK type fuzzy rule based system for stock price prediction. Expert Systems with Applications. 34, pp. 135-144.
[3] Co, H.J. and Wu, Y.T. 2008. Microscopic analysis of desired-speed car-following stability. Applied Mathematics and Computation. 196, pp. 638-645.
[4] Ettema, D., Tamminga, G., Timmermans, H. and Arentze, T. 2005. A micro-simulation model system of departure time using a perception updating model under travel time uncertainty. Transportation Research Part A. 39, pp. 325-344.
[5] Ge, H.X., Cheng, R.J. and Li, Z.P. 2008. Two velocity difference model for a car following theory. Physica A. 387, pp. 5239-5245.
[6] Gong, H., Liu, H. and Wang, B.H. 2008. An asymmetric full velocity difference car-following model. Physica A. 387, pp. 2595-2602.
[7] Hidas, P. 2005. Modelling vehicle interactions in microscopic simulation of merging and weaving. Transportation Research Part C. 13, pp. 37-62.
[8] Jamison, S. and McCartney, M. 2009. Discrete vs. Continuous time implementation of a ring car following model in which overtaking is allowed. Nonlinear Analysis: Real World Applications. 10, pp. 437-448.
[9] Juang, C.F. and Lo, C. 2008. Zero-order TSK-type fuzzy system learning using a two-phase swarm intelligence algorithm. Fuzzy Sets and Systems. 159, pp. 2910-2926.
[10] Lei, S., Hanping, J. and Huapu, L. 2005. Research of urban microscopic traffic simulation system. Proceedings of the Eastern Asia Society for Transportation Studies. Vol. 5, pp. 1610-1614.
[11] Lin, C.J. 2004. A GA-based neural fuzzy system for temperature control. Fuzzy Sets and Systems. 143, pp. 311-333.
[12] Lin, C.J. 2008. An efficient immune-based symbiotic particle swarm optimization learning algorithm for TSK-type neuro-fuzzy networks design. Fuzzy Sets and Systems. 159, pp. 2890-2909.
[13] Liu, R., Van Vliet, D. and Watling, D. 2006. Microsimulation models incorporating both demand and supply dinamycs. Transportation Research Part A. 40, pp. 125-150.
[14] Nurdden, A., Rahmat, R.A. and Ismail, A. 2007. Policies to Coerce Car Drivers to Utilize Public Transportation (for all Trips and School Trips) in Malaysia. European Journals of Scientific Research. Vol. 16 No. 4, pp. 596-605.
[15] Orosz, G., Krauskopf, B. and Wilson, R.E. 2005. Bifurcations and multiple traffic jams in a car-following model with reaction-time delay. Physica D. 211, pp. 277-293.
[16] Shunping, J. and Baohua, M. 2007. Research on CFCM: car following model using cloud model theory. J Transpn Sys Eng & IT. 7(6), pp. 67-73.