A Math Model of a Well Trained Human Operator Performing a ...
272
Louisiana State University Louisiana State University LSU Digital Commons LSU Digital Commons LSU Historical Dissertations and Theses Graduate School 1974 A Math Model of a Well Trained Human Operator Performing a A Math Model of a Well Trained Human Operator Performing a Tracking Task. Tracking Task. Thomas Mahoney Perkins Jr Louisiana State University and Agricultural & Mechanical College Follow this and additional works at: https://digitalcommons.lsu.edu/gradschool_disstheses Recommended Citation Recommended Citation Perkins, Thomas Mahoney Jr, "A Math Model of a Well Trained Human Operator Performing a Tracking Task." (1974). LSU Historical Dissertations and Theses. 2628. https://digitalcommons.lsu.edu/gradschool_disstheses/2628 This Dissertation is brought to you for free and open access by the Graduate School at LSU Digital Commons. It has been accepted for inclusion in LSU Historical Dissertations and Theses by an authorized administrator of LSU Digital Commons. For more information, please contact [email protected].
-
Upload
khangminh22 -
Category
Documents
-
view
1 -
download
0
Transcript of A Math Model of a Well Trained Human Operator Performing a ...

Louisiana State University Louisiana State University
LSU Digital Commons LSU Digital Commons
LSU Historical Dissertations and Theses Graduate School
1974
A Math Model of a Well Trained Human Operator Performing a A Math Model of a Well Trained Human Operator Performing a
Tracking Task. Tracking Task.
Thomas Mahoney Perkins Jr Louisiana State University and Agricultural & Mechanical College
Follow this and additional works at: https://digitalcommons.lsu.edu/gradschool_disstheses
Recommended Citation Recommended Citation Perkins, Thomas Mahoney Jr, "A Math Model of a Well Trained Human Operator Performing a Tracking Task." (1974). LSU Historical Dissertations and Theses. 2628. https://digitalcommons.lsu.edu/gradschool_disstheses/2628
This Dissertation is brought to you for free and open access by the Graduate School at LSU Digital Commons. It has been accepted for inclusion in LSU Historical Dissertations and Theses by an authorized administrator of LSU Digital Commons. For more information, please contact [email protected].

INFORMATION TO USERS
This material was produced from a microfilm copy of tha original document. While the most advanced technological means to photograph and reproduce this document have bean used, tha quality is heavily dependent upon tha quality of the original submitted.
The following explanation of techniques is provided to help you understand markings or patterns which may appear on this reproduction.
1. The sign or "target" for pages apparently lacking from the document photographed is "Missing Page(s)". If it was possible to obtain the missing page(s) or section, they are spliced into the film along with adjacent pages. This may have necessitated cutting thru an image and duplicating adjacent pages to insure you complete continuity.
2. Whan an image on the film is obliterated with a large round black mark, it is an indication that the photographer suspected that the copy may have moved during exposure and thus causa a blurred image. You will find a good image of the pegs in the adjacent frame.
3. When a map, drawing or chart, etc., was pert of the material being photographed the photographer followed a definite method in "sectioning" the material. It is customary to begin photoing at the upper left hand comer of a large sheet and to continue photoing from left to right in equal sections with a small overlap. If necessary, sectioning is continued again — beginning below the first row and continuing on until complete.
4. Hie majority of users indicate that the textual content is of greatest value, however, a somewhat higher quality reproduction could be made from "photographs" if essential to the understanding of the dissertation. Silver prints of "photographs" may be ordered at additional charge by writing the Order Department, giving the catalog number, title, author and specific pagas you wish reproduced.
5. PLEASE NOTE: Some pages may have indistinct print. Filmed as received.
Xptox Unfveretty MfcrofHms300 North Zaab RoadAnn Arbor, MicMaan 43106

74-24,797
PERKINS, Thomas Mahoney, J r . , 1945- A MATH MODEL OF A WELL TRAINED PERFORMING A TRACKING TASK.
The Louisiana S ta te U n iversity and A g r la r t tM l and Mechanical C o lleg e , Ph.D. , 1974 Engineering, chemical
University Microfilms, A XEROX Company, Ann Arbor, n
THIS DISSERTATION HAS BEEN MICROFILMED EXACTLY AS RfiCEIVED.
75

A MATH MODEL OF A WELL TRAINED HUMAN OPERATOR
PERFORMING A TRACKING TASK
A D i s s e r t a t i o n
S u b m it te d t o t h e G ra d u a te F a c u l t y o f t h e L o u i s i a n a S t a t e U n i v e r s i t y a n d
A g r i c u l t u r a l a n d M e c h a n ic a l C o l le g e i n p a r t i a l f u l f i l l m e n t o f t h e
r e q u i r e m e n t s f o r t h e d e g re e o f D o c to r o f P h i lo s o p h y
i n
The D e p a r tm e n t o f C h e m ic a l E n g in e e r in g
by
Thomas M ahoney P e r k i n s , J r .B . S . , L o u i s i a n a S t a t e U n i v e r s i t y , 1967 M .S . , L o u i s i a n a S t a t e U n i v e r s i t y , 1971
May, 1974

ACKNOWLEDGMENTS
T h is w o rk w as p e rfo x m e d u n d s r t h e a b l e d i r e c t i o n o f
D r . J . A . P l a n c h a r d . H is a s s i s t a n c e , e n c o u ra g e m e n t an d
c o n f id e n c e i n t h i s p r o j e c t i s g r e a t l y a p p r e c i a t e d . I w o u ld
e s p e c i a l l y l i k e t o th a n k my w i f e , S a r b a r a , who h a s h e lp e d
s u p p o r t a n d e d i t t h i s p a p e r .
O th e r p e o p le who h a v e h e lp e d i n my e f f o r t t o w r i t e t h i s
p a p e r a r e M r. J im P a u l s o n , who k e p t t h e c o m p u te r i n w o rk in g
o r d e r a n d h e lp e d a n s w e r my m any q u e s t i o n s c o n c e r n in g t h e
S ig m a 's s o f t w a r e , a n d M r. P a t P i c k e n s , who h e lp e d w i t h h i s
com m ents p e r t a i n i n g t o c o m p u te r g r a p h i c s .
i i

ABSTRACT
P e r fo rm a n c e o f a w e l l - t r a i n e d human o p e r a t o r e n g a g e d i n
a t r a c k i n g t a s k i s a n a l y z e d . The d e v ic e c o n t r o l l e d b y th e
o p e r a t o r c o n s i s t s o f a m a n u a lly p o w e re d , n o n l i n e a r a im in g
d e v ic e w i t h o p t i c a l f e e d b a c k u s e d t o t r a c k a t h r e e d im e n s io n a l
t a r g e t . M a th e m a t ic a l m o d e ls o f t h e hum an o p e r a t o r a n d t h e
a im in g d e v ic e a r e d e v e lo p e d , t h e n u s e d t o c a l c u l a t e a l ig n m e n t
e r r o r s f o r a v a r i e t y o f t a r g e t t r a j e c t o r i e s . T r a in e d s t u d e n t
o p e r a t o r s t r a c k e d s i m u l a r t a r g e t s w i t h a h y b r i d s i m u l a t i o n o f
t h e a im in g d e v i c e . The r e s u l t s o f b o t h s t u d i e s w e re a n a ly z e d
i n d i c a t i n g t h a t t h e m u l t i - m o d a l o p e r a t o r m o d e l d e v e lo p e d w as
s u p e r i o r t o t h e l i n e a r c o n t in u o u s m o d e l . I n a d d i t i o n , t h e
hum an o p e r a t o r m odel p o s s e s s e s g o o d s t a b i l i t y a n d c a n b e
u s e d t o p r e d i c t t r a c k i n g e r r o r s o v e r a w id e r a n g e o f t a r g e t
t r a j e c t o r i e s .
i i i

TABLE 0 7 CONTENTS
P a g e
ACKNOWLEDGMENTS ................................................................................................. i i
A B S T R A C T ................................................................................................................ i i i
L IST OP T A B L E S ......................................................................................... VI
LIST OP P IG U R E S ......................................................................................... V II
CHAPTER
I . IN TR O D U C TIO N .......................................................................... 1
I I . BACKGROUND IN FO R M A TIO N ................................................ 3
2 . 1 . I n t r o d u c t i o n .................................................................... 32 . 2 . T e r m i n o l o g y ......................................................................... 32 . 3 . P h y s i o l o g i c a l A s p e c ts o f t h e Human
O p e r a to r ........................................................................ 42 . 4 . M a th e m a t ic a l R e p r e s e n t a t i o n o f t h e Human
O p e r a t o r ........................................................................ 142 .4 1 . L i n e a r C o n s t a n t C o e f f i c i e n t
M o d e l s .............................................................. 142 .4 2 . S a m p le -D a ta M o d e l s .................................... 172 .4 3 . A d a p t iv e M anual C o n t r o l ..................... 192 .4 4 . M u lt i-M o d a l M o d e l s .................................... 222 .4 5 . A p p l i c a t i o n o f O p t i m i z a t io n T e c h
n i q u e s i n M an-M ach ine S y s te m s . 242 . 4 6 . O th e r M o d e l s ................................................... 24
I I I . TRACKING SYSTEM D E SC R IPT IO N ...................................... 26
3 . 1 . I n t r o d u c t i o n .................................................................... 263 . 2 . The Gun M o d e l .................................................................... 263 .3 . C a l c u l a t i o n o f A lig n m e n t E r r o r s ...................... 293 . 4 . Gun P a r a m e te r D e t e r m i n a t i o n ................................ 333 . 5 . I n p u t S i g n a l D e s c r i p t i o n ..................................... 403 . 6 . S e n s i t i v i t y A n a l y s i s o f t h e Gun S y s te m . 48
IV . REAL TIME SIMULATION OF THE TRACKING SYSTEM . . 52
4 . 1 . I n t r o d u c t i o n .................................................................... 52
i v

CHAPTER P ag e
4 . 2 . T he H y b r id C o m p u te r . . . . . . . . . . . 524 . 3 . T he H y b r id P r o g r a m s .................................................. 54
V. THE HUMAN OPERATOR M O D E L ........................................... 66
5 . 1 . I n t r o d u c t i o n ................................................................. 665 . 2 . The T r a c k in g M o d e ....................................................... 66
5 .2 1 . T he L in e a r Human O p e r a to r . . . . 665 .2 2 . The N o n l i n e a r O p e r a t o r ................... 75
5 . 3 . V e r i f i c a t i o n o f t h e T r a c k in g Mode M odel . 1195 . 4 . T he A c q u i s i t i o n M o d s ...................................................138
5 .4 1 . D e r iv a t io n o f S w itc h in g T im es • . 1385 .4 2 . A c q u i s i t i o n a t C r o s s o v e r .................141
5 . 5 . V e r i f i c a t i o n o f t h e A c q u i s i t i o n ModeM o d e l ............................................................................. 142
5 . 6 . The D i g i t a l S i m u l a t i o n ..............................................157
V I . EXAMINATION OF RESULTS AND CONCLUSIONS . . . . 161
6 . 1 . E x a m in a t io n o f E x p e r im e n ta l R e s u l t s . . . 1616 . 2 . C o n c l u s i o n s ............................................................................162
B IB L IO G R A PH Y ........................................................................................................... 164
APPENDICES
A . CALCULATION OF ALIGNMENT E R R O R ...............................168
A - l . D e v e lo p m e n t o f C o o r d in a te R o t a t i o n E q u at i o n ........................................................................................168
B . PERSPECTIVE P R O JE C T IO N ...................................................171
C . COMPUTER LISTING OF PERSPECTIVE PROJECTIONPROGRAM....................................................................................... 184
D. THE GUN MODEL............................................................................ 198
D - l . D e r i v a t i o n o f S c a le d Gun E q u a t io n s . . . 198D -2 . D e v e lo p m en t o f L o g ic - S i g n a l f o r E l e c t r o n i c
S w i t c h ........................................................................ 201
E . PAPER TAPE CONVERSION PROGRAM....................................208
F . COMPUTER LISTING OF HYBRID PR O G R A M .....................210
G. LINEARIZATION OF THE GUN M O D E L .............................. 223
H . COMPUTER LISTING OF DIGITAL SIMULATION . . . . 225
V I T A ................................................................................................................................255
v

L IST OF TABLES
T a b le P ag e
1 . The V a r ia t io n , o f R e a c t io n T im e w i th A g e ............... 10
2 . Gun P a r a m e t e r s ........................................................................... 41
3 . A i r c r a f t M an eu v ers T ype I .................................................. 42
4 . A i r c r a f t M a n eu v e rs Type I I ............................................. 43
5 . Optim um P a r a m e te r s f o r DSP Human O p e r a t o r M odel . 106
D - l . S c a l i n g T a b le o f t h e Gun M odel <A zim u th ) . . . . 200
D -2 . S c a l i n g T a b le o f t h e Gun M odel ( E le v a t i o n ) . . . 203
D -3 . P o t S e t t i n g s f o r t h e A n a lo g M o d e l ................................. 205
D -4 . D e s c r i p t i o n o f L o g ic S i g n a l ................................................ 206
D -5 . T r u th T a b le f o r L o g ic S w i tc h in g S i g n a l ...................... 207
v i

5
6
7
11
13
16
18
20
21
25
27
31
32
32
34
36
37
L IST OF FIGURES
I l l u s t r a t i o n o f C o m p e n sa to ry a n d P u r s u i tT r a c k in g D is p la y s ..................................................................
T he V i s u a l C o m p e n sa to ry T r a c k in g S y s te m . . . .
The V i s u a l P u r s u i t T r a c k in g S y s te m . . . . . .
The E f f e c t s o f T r a i n i n g o n T r a c k in g P e r f o rm a n c e . .......................... .......................... .....
R ange o f I n d i v i d u a l D i f f e r e n c e s U s in g a H andw h e e l t o O vercom e F o r c e s a t D i f f e r e n t R o t a t i o n S p e e d s ....................... . .........................................
D e s c r ib i n g F u n c t io n B lo c k D ia g ra m . . . . . . .
T y p ic a l S e t - u p f o r R em nan t M in im iz a t io n . . . .
S a m p le d -D a ta M odel o f Human O p e r a t o r i n Compens a t o r y T r a c k in g .......................................................................
M a jo r A d a p t iv e F u n c t io n s i n M anual C o n t r o l . .
C o s t e l l o '8 D ual-M ode M odel . . . . . . . . . .
Gun M odel ............................................................................................
Gun P o s i t i o n i n I n e r t i a l C o o r d in a te S y s te m . .
S i t e P a t t e r n Gun C o o r d in a te S y s te m . .....................
A n g le M is a l ig n m e n t Gun C o o r d in a te S y s te m . . .
S i m p l i f i e d T r a c k in g S y s te m ..............................................
R o o t L o cu s D iag ram o f S i m p l i f i e d T r a c k in g - S y s te m I .......................................................................................
R o o t L o cu s D iag ram o f S i m p l i f i e d T r a c k in g - S y s te m I I .......................................................................................
v i i

F ig u r e P a fP
3 -8 Gun M odel (A z im u th C h a n n e l) w i t h L i m i t e r s . . . 38
3 -9 P e r s p e c t i v e P r o j e c t i o n o f F l i g h t P a th N um ber1 0 2 44
3 -1 0 P e r s p e c t i v e P r o j e c t i o n o f F l i g h t P a th N um ber 1 . 49
3 -1 1 P e r s p e c t i v e P r o j e c t i o n o f F l i g h t P a th N um ber 5 . 44
3 -1 2 P e r s p e c t i v e P r o j e c t i o n o f F l i g h t P a th N um ber1 0 4 7
3 -1 3 R e sp o n se C u rv e s f o r Two U n s ta b le S y s te m s . . . 30
3 -1 4 R e s u l t s o f S e n s i t i v i t y A n a l y s i s ................................... 31
4 -1 H y b r id S i m u l a t io n : O p e r a t o r i n L oop . . . . . 99
4 -2 H y b r id S i m u l a t io n o f C o m p e n sa to ry T r a c k in g . . 94
4 - 3 D i g i t a l F low C h a r t .................................................................. 37
4 -4 A n a lo g S i m u l a t io n o f G u n ................................................... 34
4 - 5 P e r fo rm a n c e V e rs u s E x p e r i e n c e ........................................ 41
4 -6 T r a c k in g P e r fo rm a n c e o f A c tu a l O p e r a t o r I . . . 4 9
4 - 7 T r a c k in g P e r fo rm a n c e o f A c tu a l O p e r a t o r I I . . 44
4 -8 T r a c k in g P e r fo rm a n c e o f A c t u a l O p e r a t o r I I I . . 44
5 -1 E r r o r V e rs u s E r r o r R a t e ........................................................ 67
5 -2 T r a c k in g o f S t a t i o n a r y T a r g e t K » 5 ........................... 49
5 - 3 T r a c k in g o f S t a t i o n a r y T a r g e t K * 2 0 ...................... 44
5 -4 T r a c k in g w i t h L i n e a r O p e r a to r I ..................................... 79
5 -5 T r a c k in g w i th L i n e a r O p e r a t o r I I ................................ 73
5 -6 T r a c k in g w i t h L i n e a r O p e r a t o r I I I ................................ 74
5 - 7 T r a c k in g w i t h N o n -L in e a r O p e r a t o r I . . . . . . 74
5 - 8 T r a c k in g w i t h N o n -L in e a r O p e r a t o r I I .................... 77
5 -9 T r a c k in g w i t h N o n -L in e a r O p e r a t o r I I I .................... 78
5 -1 0 C o n t r o l S y s te m w i t h Human O p e r a t o r S e n s in gA i r c r a f t V e l o c i t y ................................................................... 80
v i i i

F ig u r e P a g e
5 -1 1 T r a c k in g w i t h N o n - L in e a r M odel P l u s F e e dF o rw a rd O p e r a t o r I ................................................................... 82
5 -1 2 T r a c k in g w i t h N o n - L in e a r M odel P l u s F e e dF o rw a rd O p e r a t o r I I .............................................................. 83
5 -1 3 T r a c k in g w i t h N o n -L in e a r M odel P l u s F e e dF o rw a rd O p e r a t o r I I I .............................................................. 84
5 -1 4 T r a c k in g w i t h N o n - L in e a r M odel P l u s F e e dF o rw a rd O p e r a to r I V ............................................................. 85
5 -1 5 T r a c k in g w i t h N o n - L in e a r M odel P l u s F e e dF o rw a rd O p e r a t o r V .................................................................. 86
5 -1 6 T r a c k in g w i t h N o n -L in e a r M odel P l u s F e e dF o rw a rd O p e r a t o r V I .............................................................. 87
5 -1 7 T r a c k in g w i t h N o n -L in e a r M odel P l u s F e e dF o rw a rd O p e r a t o r V I I ............................................................. 89
5 -1 8 T r a c k in g w i t h N o n -L in e a r M odel P l u s F e e dF o rw a rd O p e r a t o r - C o u rs e 1 0 2 .................................... 91
5 -1 9 T r a c k in g M odel o f H unan O p e r a t o r ..................................... 92
5 -2 0 a A v e ra g e Human O p e r a t o r T r a c k in g P e r fo rm a n c e - I(A z im u th E r r o r ) ........................................................................ 95
5 -2 0 b A v e ra g e Human O p e r a to r T r a c k in g P e r fo rm a n c e - I I( E l e v a t i o n E r r o r ) . , . .............................................. 96
5 - 2 1 a A v e ra g e Human O p e r a t o r T r a c k in g P e r fo rm a n c e - I I(A z im u th E r r o r ) ......................... 97
5 -2 1 b A v e ra g e Human O p e r a t o r T r a c k in g P e r fo rm a n c e - I I( E l e v a t i o n E r r o r ) ................................................................... 98
5 -2 2 a A v e ra g e Human O p e r a t o r T r a c k in g P e r fo rm a n c e -I I I (A z im u th E r r o r ) .............................................................. 99
5 -2 2 b A v e ra g e Human O p e r a t o r T r a c k in g P e r f o rm a n c e -I I I ( E l e v a t i o n E r r o r ) . .................................................... 100
5 -2 3 P e r fo rm a n c e o f Human O p e r a t o r M odel - I(A z im u th O p e r a t o r ) ........................................................................ 101
5 -2 4 P e r fo rm a n c e o f Human O p e r a t o r M odel - I I( E le v a t i o n O p e r a t o r ) ................................................................... 102
i x

P ag#
103
104
107
108
109
110
111
112
113
114
115
116
117
118
120
121
122
P e r fo rm a n c e o f Human O p e r a t o r M odel - I I I (A z im u th O p e r a t o r ) .............................................................
P e r fo rm a n c e o f Human O p e r a t o r M odel - IV( E l e v a t i o n O p e r a to r ) ........................................................
P e r fo rm a n c e o f D6P Human O p e r a t o r M odel - I (A z im u th O p e r a t o r ) ..............................................................
P e r fo rm a n c e o f DSP Human O p e r a t o r M odel - I I ( E l e v a t i o n O p e r a to r ) ........................................................
P e r fo rm a n c e o f DSP Human O p e r a t o r M odel - I I I (A z im u th O p e r a t o r ) ..............................................................
P e r fo rm a n c e o f DSP Human O p e r a t o r M odel - IV ( E l e v a t i o n O p e r a to r ) .........................................................
Mean T r a c k in g E r r o r fro m M odel f o r S y s te m 3 -1 (A z im u th O p e r a t o r ) .............................................................
Mean T r a c k in g E r r o r fro m M odel f o r S y s te m 3 -1 ( E l e v a t i o n O p e r a to r ) ........................................................
Mean T r a c k in g E r r o r fro m M odel f o r S y s te m 3- I I (A z im u th O p e r a t o r ) ..............................................................
Mean T r a c k in g E r r o r fro m M odel f o r S y s te m 3 - I I ( E l e v a t i o n O p e r a to r ) ........................................................
Mean T r a c k in g E r r o r f ro m M odel f o r S y s te m 2 -1 (A z im u th O p e r a to r ) .....................
Mean T r a c k in g E r r o r fro m M odel f o r S y s te m 2 -1 ( E l e v a t i o n O p e r a to r ) ........................................................
Mean T r a c k in g E r r o r fro m M odel f o r S y s te m 2 - I I (A z im u th O p e r a t o r ) .............................................................
Mean T r a c k in g E r r o r f ro m M odel f o r S y s te m 2 - I I ( E l e v a t i o n O p e r a to r ) .........................................................
A z im u th E r r o r v s T im e ( F l i g h t P a th #1 -S tu d y #2) ..................................................................................
E l e v a t i o n E r r o r v s Tim e ( F l i g h t P a t h #1 -S tu d y #2) . . . . . . . . . . . . .....................
A z im u th E r r o r v s T im a ( F l i g h t P a t h #5 -S tu d y #2) ..................................................................................
x i

F i g u r e P ag e
5 -3 8 E l e v a t i o n E r r o r va T im e ( F l i g h t P a th #5 -S tu d y # 2 ) .............................................................................................123
5 -3 9 A s im u th E r r o r v s T im s ( F l i g h t P a th #6 -S tu d y # 2 ) ............................................................................................. 124
5 -4 0 E l e v a t i o n E r r o r v s T im e ( F l i g h t P a th #6 -S tu d y # 2 ) ............................................................................................. 125
5 -4 1 A z im u th E r r o r v s T im e ( F l i g h t P a th #11 -S tu d y # 2 ) ............................................................................................. 126
5 -4 2 E l e v a t i o n E r r o r v s T im e ( F l i g h t P a th #11 -S tu d y # 2 ) ......................................... 127
5 -4 3 A z im u th E r r o r v s Tim e ( F l i g h t P a th #16 -S tu d y # 2 ) .............................................................................................128
5 -4 4 E l e v a t i o n E r r o r v s T im e ( F l i g h t P a th #16 -S tu d y # 2 ) ....................................... 129
5 -4 5 A z im u th E r r o r v s T im e ( F l i g h t P a t h #6 -S tu d y # 3 ) .................................. 130
5 -4 6 E l e v a t i o n E r r o r v s T im e ( F l i g h t P a t h #6 -S tu d y # 3 ) ........................................................................................... 131
5 -4 7 A z im u th E r r o r v s T im e ( F l i g h t P a th #10 -S tu d y # 3 ) ............................................................................................132
5 -4 8 E l e v a t i o n E r r o r v s T im e ( F l i g h t P a t h #10 -S tu d y # 3 ) ....................................... 133
5 -4 9 A z im u th E r r o r v s T im e ( F l i g h t P a th #15 -S tu d y # 3 ) .................................. 134
5 -5 0 E l e v a t i o n E r r o r v s T im e ( F l i c p i t P a t h #15 -S tu d y # 3 ) ....................................... 135
5 -5 1 A z im u th E r r o r v s T im e ( F l i g h t P a th #20 -S tu d y # 3 ) .................................. 136
5 -5 2 E l e v a t i o n E r r o r v s T im e ( F l i g h t P a th #20 -S tu d y # 3 ) ....................................... 137
5 -5 3 F low D ia g ra m o f t h e M u lt i-M o d a l T r a c k in gM o d e l ............................................................................ 144
5 -5 4 a C o m p a riso n o f A c q u i s i t i o n P e r f o rm a n c e . . . . . 145
x i

F i g u r e P ag e
5 -5 4 b C o m p a riso n o f A c q u i s i t i o n P e - fo rm a n c e . . . . 146
5. 55a C o n p a r is o n o f A c q u i s i t i o n P e r fo rm a n c e . . . . 147
5 -5 5 b C o m p a riso n o f A c q u i s i t i o n P e r fo rm a n c e . . . . 148
5 - 5 6 a C o m p a riso n o f A c q u i s i t i o n P e r fo rm a n c e . . . . 149
5 -5 6 b C o m p a riso n o f A c q u i s i t i o n P e r fo rm a n c e . . . . 150
5 -5 7 P e r fo rm a n c e a t C r o s s o v e r ..................................................151
5 -5 8 P e r fo rm a n c e a t C r o s s o v e r .................................................. 152
5 -5 9 P e r fo rm a n c e a t C r o s s o v e r .................................................. 153
5 -6 0 P e r fo rm a n c e a t C r o s s o v e r .................................................. 154
5 -6 1 D u a l-M o d e l T r a c k in g D is c o n t in u o u s T a r g e t . . 155
5 -6 2 D u a l-M o d e l T r a c k in g D is c o n t in u o u s T a r g e t . . 156
5 -6 3 F low C h a r t o f D i g i t a l S i m u l a t i o n ........................ 159
A—1 n o t a t i o n o f I n e r t i a l C o o r d in a te S y s te mT h ro u g h A n g le s a n d .........................................................169
B - l P r o j e c t i o n P ro g ra m F low C h a r t ........................................173
B -2 P e r s p e c t i v e P r o j e c t i o n o f F l i g h t P a t h 101 . . 175
B -3 P e r s p e c t i v e P r o j e c t i o n o f F l i g h t P a th 103 . . 176
B -4 P e r s p e c t i v e P r o j e c t i o n o f F l i g h t P a th N o . 2 . 177
B -5 P e r s p e c t i v e P r o j e c t i o n o f F l i g h t P a t h N o . 3 . 178
B -6 P e r s p e c t i v e P r o j e c t i o n o f F l i g h t P a th N o. 4 . 179
B -7 P e r s p e c t i v e P r o j e c t i o n o f F l i g h t P a t h N o . 6 . 180
B -8 P e r s p e c t i v e P r o j e c t i o n o f F l i g h t P a th N o . 7 . 181
B -9 P e r s p e c t i v e P r o j e c t i o n o f F l i g h t P a th N o . 8 . 182
B -1 0 P e r s p e c t i v e P r o j e c t i o n o f - F l i g h t p a t h N o . 9 . 183
D—1 S c a l e d Gun M o d e l ......................................................................199
X ii
F i g u r e P ag e
D -2 C i r c u i t D iag ram - G e n e r a t io n o f t h e L o g icC o n t r o l S i g n a l (L S V f) ................................... 202
G - l F low D iag ram o f L i n e a r i s a t i o n P r o c e d u r e . . . 224
x i i i

CHAPTER X
INTRODUCTION
B e g in n in g a b o u t 19>t5, a l a r g e num ber o f p a p e r s w e re
p u b l i s h e d i n t h i s c o u n t r y an d i n E n g la n d w h ic h u t i l i z e d c o n
t r o l t h e o r y t o d e s c r i b e t h e r o l e o f t h e human i n t r a c k i n g .
I n t e r e s t i n - t h i s a r e a o f c o n t r o l d e c l i n e d d u r in g t h e m id
6 0 * s b e c a u s e im p ro v e m e n ts i n c o m p u te r t e c h n o lo g y l e d many
p e o p le t o b e l i e v e t h a t i n s t r u m e n t a t i o n w o u ld r e p l a c e t h e
hum an o p e r a t o r i n m o st c o n t r o l t a s k s . H o w ev er, t h e v a lu e o f
t h e hum an o p e r a t o r i s b e in g r e d i s c o v e r e d b e c a u s e o f h i s a b i l i t y
t o p e r fo r m a m u l t i t u d e o f t a s k s , h i s a d a p t a b i l i t y u n d e r
v a r y i n g c o n d i t i o n s , h i s r e l i a b i l i t y , an d h i s r e l a t i v e l y low
c o s t .
To d a t e , a d e f i n i t i v e m odel o f t h e human o p e r a t o r h a s
n o t b e e n d e v e lo p e d , i n s t e a d , t h e r e a r e many m o d e ls . M ost o f
t h e d i f f e r e n c e s i n t h e s e m odelB a r i s e fro m c o n s i d e r i n g t h e
o p e r a t o r fro m d i f f e r i n g p o i n t s o f v ie w . A ls o t h e r e may b e a
t r a n s f e r f u n c t i o n f o r e a c h o f t h e v a r i o u s c l a s s e s o f i n p u t -
o u t p u t c o m b in a t io n s . T h u s , f o r a p a r t i c u l a r m an -m ach in e
s y s te m a n d c l a s s o f i n p u t s i g n a l s i t i s p o s s i b l e t o d e s c r i b e
m a th e m a t i c a l ly t h e t r a n s f e r f u n c t i o n o f t h e human o p e r a t o r .

2
Much o f t h e c u r r e n t r e s e a r c h i s c e n t e r e d a ro u n d o b t a i n i n g
a c c u r a t e hum an o p e r a t o r m o d e ls i n o r d e r t o a i d i n t h e d e s ig n
o f m an -m ac h in e s y s te m s a n d t o d e v e lo p b e t t e r t e c h n iq u e s f o r
e v a l u a t i n g m a n u a lly c o n t r o l l e d s y s te m s .
I n t h e s e c o n d c h a p t e r som e o f t h e te rm s u s e d i n t h e
p a p e r a r e d e f i n e d , a n d a few p h y s i o l o g i c a l a s p e c t s o f t h e
hum an o p e r a t o r a r e 'p r e s e n t e d . F u r th e r m o r e , som e o f t h e v a r io u s
m e th o d s u s e d t o m o d e l t h e hum an o p e r a t o r a r e p r e s e n t e d .
I n C h a p te r I I I a m a th e m a t i c a l m o d e l o f t h e c o n t r o l l e d
s y s te m , a n a im in g m ec h an ism , i s d e v e lo p e d . T h is i n c l u d e d
m o d e l in g t h e c o n t r o l l e d e l e m e n t , d e v e lo p in g a way t o c a l c u
l a t e a im e r r o r s , a n d s e l e c t i n g v a l u e s o f t h e m o d e l p a r a m e t e r s .
F i n a l l y , i n c o n j u n c t i o n w i t h d e s c r i b i n g t h e c o n t r o l l e d s y s te m
t h e t r a c k i n g t a s k s a r e d i s c u s s e d .
I n C h a p te r IV t h e h y b r i d c o m p u te r p ro g ra m u s e d i n
o b t a i n i n g t r a c k i n g d a t a i s d o c u m e n te d . T h is d a t a w i l l be
u s e d i n C h a p te r s V a n d VI t o d e v e lo p hum an o p e r a t o r p a r a m e te r s
a n d t o v e r i f y t h e o p e r a t o r m o d e l .
The hum an o p e r a t o r m odel c o n s i s t i n g o f a m u lt i -m o d e
m o d e l i s d e v e lo p e d i n C h a p te r V , T he m odel c o n s i s t s o f a
t r a c k i n g mode a n d a c q u i s i t i o n m o d e s . I n a d d i t i o n t o d e v e lo p in g
t h e hum an o p e r a t o r m o d e l, t h e d i g i t a l s i m u l a t i o n o f t h e
t r a c k i n g s y s te m i s a l s o d i s c u s s e d .
T he f i n a l c h a p t e r c o n t a i n s a n e x a m in a t io n o f t h e e x p e
r i m e n t a l r e s u l t s a n d t h e c o n c l u s i o n s a r r i v e d a t a s a r e s u l t
o f t h e r e s e a r c h .

CHAPTER I I
BACKGROUND AND INFORMATION
2 . 1 . I n t r o d u c t i o n
The r e s e a r c h d e s c r i b e d i n t h i s d i s s e r t a t i o n d e a l s w i th
t h e m a th e m a t ic a l d e s c r i p t i o n o f m an -m ach in e s y s te m s . T h e r e
f o r e , i t i s c o n v e n ie n t a t t h i s p o i n t t o d e f i n e some o f th e
te rm s u s e d i n t h i s p a p e r a n d t o d i s c u s s a few p h y s i o l o g i c a l
a s p e c t s o f t h e human o p e r a t o r . A ls o , some o f t h e v a r i o u s
m e th o d s u s e d t o m o d el th e hum an o p e r a t o r a r e su m m arize d i n
t h i s c h a p t e r .
2 . 2 . T e rm in o lo g y
T h e re a r e b a s i c a l l y tw o t y p e s o f t r a c k i n g t o o l s - com
p e n s a t o r y a n d p u r s u i t t r a c k i n g . 3. The tw o k in d s o f t r a c k i n g
d i f f e r o n ly i n t y p e o f s i g n a l s e n s e d by t h e o p e r a t o r . The
o p e r a t o r r e c e i v e s s e p a r a t e l y t a r g e t a n d c o n t r o l l e d e le m e n t
i n f o r m a t i o n i n p u r s u i t t r a c k i n g , w h e re a s he o n l y r e c e i v e s t h e
d i f f e r e n c e ( a n e r r o r s i g n a l ) i n c o m p e n s a to ry t r a c k i n g .
C o m p e n sa to ry t r a c k i n g . I n c o m p e n s a to ry t r a c k i n g t h e r e
i s a d i s p l a y ( u s u a l l y v i s u a l ) w h ic h h a s tw o i n d i c a t o r s , o n e
f i x e d a n d t h e o t h e r m o v e a b le . The t a r g e t i s r e p r e s e n t e d by
3

t h e m o v e a b le i n d i c a t o r , w h i le t h e c o n t r o l l e d e le m e n t i s r e p r e
s e n t e d by a f i x e d p o i n t a n d i s s u b j e c t t o c o n t r o l b y m a n ip u
l a t i o n o f t h e c o n t r o l d e v i c e s . When t h e tw o a r e s u p e r im p o s e d ,
t h e c o n t r o l l e d e le m e n t i s "o n t a r g e t . " Any d i f f e r e n c e
r e p r e s e n t s an e r r o r , a n d t h e f u n c t i o n o f t h e o p e r a t o r i s t o
e l i m i n a t e o r m in im iz e t h a t e r r o r . An i l l u s t r a t i o n o f th e d i s
p l a y iB shown i n F ig u r e 2 -1 A , w h i l e a b lo c k d ia g ra m o f a t y p i c a l
v i s u a l c o m p e n s a to ry t r a c k i n g s y s te m i s g iv e n i n F ig u r e 2 - 2 .
P u r s u i t T r a c k in g . I n p u r s u i t t r a c k i n g th e l o c a t i o n o f
b o th t h e t a r g e t a n d t h e c o n t r o l l e d e le m e n t a r e know n , s o t h e i r
r e l a t i o n s h i p ( a s i n s p a c e ) c a n be v i s u a l i z e d b y t h e o p e r a t o r .
A p p r o p r i a t e c o n t r o l w i l l a l i g n t h e c o n t r o l l e d e le m e n t w i th
t h e t a r g e t a n d k e e p i t on t a r g e t , e v e n th o u g h t h e t a r g e t
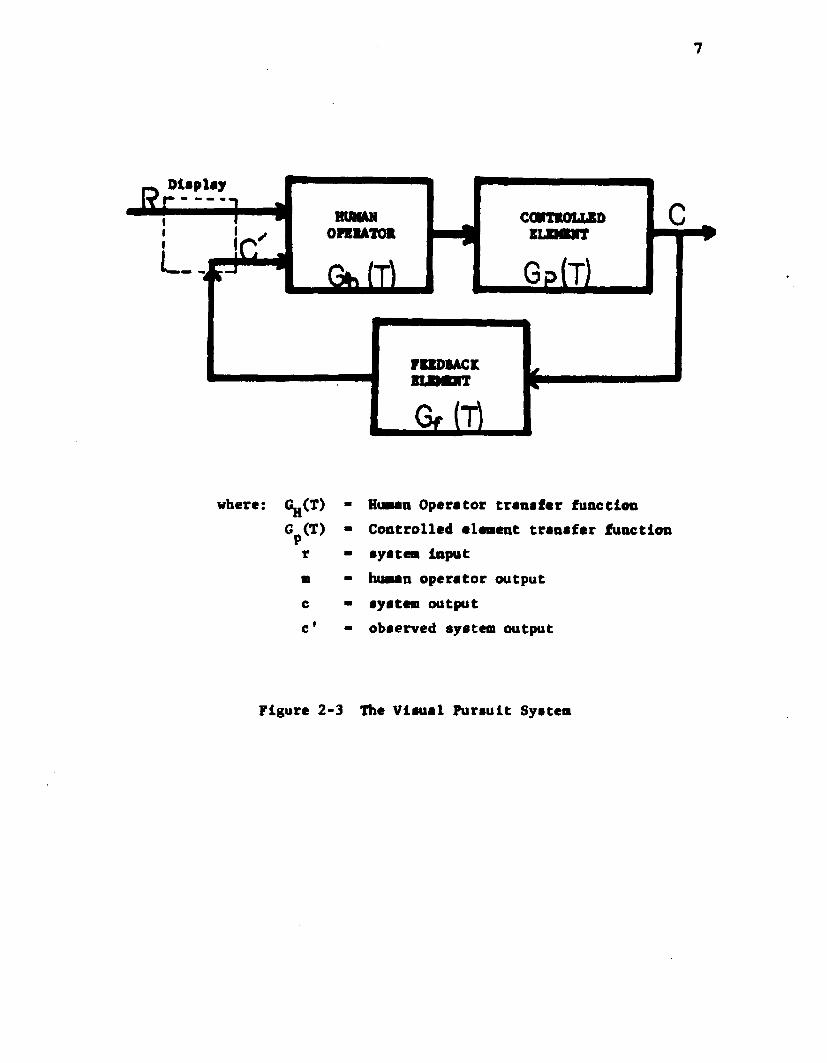
c o n t i n u e s t o m ove. A p u r s u i t d i s p l a y i s i l l u s t r a t e d i n
F ig u r e 2-1B an d a b lo c k d ia g ra m o f a v i s u a l p u r s u i t t r a c k i n g
s y s te m i s g iv e n i n F ig u r e 2 - 3 . A s p e c i a l c a s e o f p u r s u i t
t r a c k i n g i s p r e c o g n i t i v e t r a c k i n g . The te r m " p r e c o g n i t i v e "
i s e m p lo y e d t o d e n o te t h e s i t u a t i o n i n w h ic h t h e f u t u r e v a lu e s
o f t h e i n p u t s i g n a l a r e v i s i b l e o r know n. D r iv in g a v e h i c l e
o r o p e r a t i n g a c r a n e a r e e x a m p le s o f p r e c o g n i t i v e t r a c k i n g .
2 . 3 . P h y s i o l o g i c a l A s p e c ts o f t h e Human O p e r a t o r
W. F . F i e l d i n g h a s su m m a riz e d some o f t h e m ore i m p o r t a n t
hum an c h a r a c t e r i s t i c s a n d f a c t o r s w h ic h a f f e c t th e m .
(1 ) Common o p e r a t o r r e a c t i o n s t o s t i m u l u s c a n b e d i v id e d
i n t o t h r e e m a jo r c a t e g o r i e s :

5
Compensatory tracking Pursuit tracking
2 -LA
C (control): FixedT (target): Movable C- T: Error
2 - IB
C(control): MovableT (target): MovableC -----T : shows d ifferen ce
in r e la tiv e locations
Figure 2-1 I llu s tr a t io n o f Coaipenaatory and pursuit tracking d isp lays.
A compensatory tracking d isp lay shows only the d ifferen ce (error) between the target T and the contro lled element C. A pursuit display shows the location (or other value represented) of both the target and the controlled element.

6
HUMANOPERATOR
CONTROLLED
Gjg
FEEDBACKELEMENT
Uhere: G^(i) ■ Ruaan Operator Transfer function6 p (i) ■ Controlled Eleaent Transfer function
r * aystea inpute ■ ayatea errora ■ Huaan operator outputc ■ ayatea output
■ observed ayatea output. •
Figure 3-3 The V isual Compensatory Tracking Syatea
Otiplay
G p IT)
where: CuCT) “ Huean Operator transfer functionG (T) - Controlled eleaent transfer function
Pr ■ ayaten inputm ■ hunan operator outputc ■ system outputc* “ observed system output
Figure 2-3 The Visual Pursuit System

a ) R e f la x a c t i o n : a lm o s t i n v o l u n t a r y w i t h o n ly a few m i l l i s e c o n d s b e tw e e n s t i m u l u s a n d r e a c t i o n
b ) N orm al r e a c t i o n : a c t i o n c a r r i e d o u t v o l u n t a r i l y a n d r e q u i r i n g a lm o s t t o t a l c o n c e n t r a t i o n upon s t i m u l u s .
c ) A u to m a t ic r e a c t i o n : f a s t v o l u n t a r y r e a c t i o n a c h i e v a b l e a f t e r much p r a c t i c e .
( 2 ) A s t i m u l u s m u s t e x c e e d a c e r t a i n t h r e s h o l d v a lu e
b e f o r e t h e s e n s o r y c e l l s w i l l t r a n s m i t an im p u l s e .
( 3 ) The hum an e y e h a s a h i g h s e n s i t i v i t y a n d c a n d e t e c t
m is a l ig n m e n t a s s m a l l a s f i v e s e c o n d s o f a r c a t t h e e y e u n d e r
s u i t a b l e c o n d i t i o n s .
( 4 ) C o n t r a s t b e tw e e n t a r g e t an d b a c k g ro u n d i s v e ry
i m p o r t a n t i n t a r g e t d e t e c t i o n a n d a l ig n m e n t i n t r a c k i n g .
( 5 ) R e a c t io n t i m e , t h e t im e d e la y b e tw e e n r e c e i p t o f an
a p p r o p r i a t e s t i m u l u s a n d i n i t i a t i o n o f r e a c t i o n , c a n b e
a p p ro x im a te d '* b y :
T - 0 .2 7 ln (N + 1 ) ( 2 . 3 - 1 )
w h e re : N = N um ber o f e q u i - p r o b a b l e s i g n a l sT = R e a c t io n t im e i n s e c o n d s .
T h is h a s b e e n r e p o r t e d a s a g o o d a p p r o x im a t io n , b u t i n some
c a s e s r e a c t i o n t im e o f a s l i t t l e a s .1 s e c o n d s h a s b e e n
o b s e r v e d . A v a lu e o f .1 5 s e c o n d s f o r u s u a l r e a c t i o n tim e i s
com m only u s e d , w hen m o d e lin g a hum an o p e r a t o r p e r f o r m in g a
t r a c k i n g t a s k .h
( 6 ) T he f o l lo w in g f a c t o r s a f f e c t human r e a c t i o n t im e s :
a ) R e a c t io n t im e v a r i e s w i t h t h e t y p e o f s t i m u l u s , r a n g i n g fro m .7 s e c o n d s f o r p a i n , t o a b o u t .19 s e c o n d s f o r l i g h t a n d s o u n d .
b ) R e a c t io n t im e v a r i e s w i th s e x , , m a le s h a v in g a p p r o x im a te ly .1 s e c o n d s h o r t e r r e a c t i o n t im e f o r so u n d a n d l i g h t t h a n f e m a le s .

9
c ) R e a c t io n t im e v a r i e s w i t h a g e . The v a r i a t i o n o f r e a c t i o n t im e f o r l i g h t a n d so u n d i s g iv e n i n T a b le 1 .
d ) R e a c t io n t im e c a n b e r e d u c e d b y p r a c t i c e a p p r o x i m a te ly 10 p e r c e n t .
( 7 ) V o lu n ta r y c o r r e c t i v e m ovem ent s u c h a s o c c u r s i n
t r a c k i n g a p p e a r s t o h a v e tw o c o m p o n e n ts :
a ) The f i r s t , a r a p i d j e r k t o i n i t i a t e t h e m o tio n .
b ) The s e c o n d , a f t e r t h i s i n i t i a l d i s c o n t i n u i t y , a c o n t in u o u s t r a c k i n g m o tio n i s a c h ie v e d .
( 8 ) P r a c t i c e a n d l e a r n i n g e n a b le a human o p e r a t o r t o
r e d u c e h i s r e a c t i o n t im e t o w i t h i n a c c e p t a b l e l i m i t s an d to
i n c r e a s e h i s a c c u r a c y by l e a r n i n g t o p r e d i c t f u t u r e e v e n t s .
F ig u r e 2-** show s t h e e f f e c t s o f t r a i n i n g o n t r a c k i n g q u a l i t y .
Upon r e c o g n i t i o n o f a r e g u l a r p a t t e r n , t h e o p e r a t o r u s u a l l y
s w i t c h e s f ro m a c t i v e t r a c k i n g t o w h a t i s c a l l e d " m o n i t o r i n g , "
t h u s r e d u c i n g h i s w ork l o a d w h i l e a c c o m p l i s h in g s u p e r i o r
c o n t r o l . I n t h i s c a s e , t h e hum an o p e r a t o r becom es a p r e c o g n i
t i v e s i g n a l g e n e r a t o r a n d t h u s n u l l i f i e s t h e t im e l a g .
I n a d d i t i o n t o t h e c h a r a c t e r i s t i c s su m m arize d b y F i e l d i n g ,C
F o g e l s u g g e s t s t h e e x i s t e n c e o f an a c q u i s i t i o n mode w h ic h i s
t r i g g e r e d b y an y e r r o r o r e r r o r r a t e o u t s i d e t h e t r a c k i n g
mode d o m a in . I n t h i s mode o f o p e r a t i o n t h e o p e r a t o r t r i e s to7 8 9m in im iz e t h e e r r o r a s r a p i d l y a s p o s s i b l e . N a d l e r , * *
s t u d y i n g arm m o tio n c o n d i t i o n s o f maximum s t r e s s , o b s e r v e d
v e l o c i t y a n d l im e h i s t o r i e s a lm o s t i d e n t i c a l w i th t h o s e o f
C o s t e l l o 's ^ ® t im e - o p t i m a l s e c o n d - o r d e r c o n t r o l l e r i n r e s p o n s e
t o s t e p i n p u t s . A n o th e r s y s te m w h ic h s u g g e s t s t h e e x i s t e n c e

10
The Variation
* i«
5
10
20
30
40
50
55
60
TABLE 1
o f Reaction Tla» with Age
Reaction Tlaie
0.40 aec.
0.30 sec .
0.20 aec.
0.22 sec .
0.25 sec .
0.28 sec.
0.35 sec .
0.50 sec .

11
Before Training
A fter Training
Target
Operator Aeaponee _
Figure 2-4 The E ffecta Training on Tracking Performance

12
o f a n a c q u i s i t i o n n o d e i s t h e c o n t r o l s y s te m w h ic h e n a b l e s u s11 12t o * move o u r e y e s a n d f o l lo w a m o v in g t a r g e t . The i n i t i a l
s c a n n in g m o v em en ts , c a l l e d s o c c a d i c e y e m o v e m e n ts , c a n b e
c h a r a c t e r i z e d b y v e ry r a p i d a c c e l e r a t i o n a n d d e c e l e r a t i o n (u p
t o 4 0 /0 0 0 d e g r e e s / s e c ^ ) a n d a p e a k v e l o c i t y d u r i n g t h e m o tio n
a s h ig h a s 400 t o 600 d e g r e e s / s e c . I n a d d i t i o n t o t h i s r a p i d
m ovem en t, t h e r e i s v e r y l i t t l e o v e r s h o o t o f t h e t a r g e t .
I t i s a l s o p e r t i n e n t t o l i s t s e v e r a l d e s ig n c h a r a c t e r i s
t i c s o f h a n d w h e e l c o n t r o l s .
( 1 ) The optim um d i a m e t e r f o r a h a n d w h e e l w i t h n i n e t y
in c h -p o u n d s o f f u n c t i o n a l t o r q u e i s 10 i n c h e s . ***
( 2 ) F o r op tim um a c c u r a c y i n o n e -h a n d e d t r a c k i n g , i t w as
fo u n d t h a t t h e h a n d w h e e l r a d i u s s h o u ld b e 4 .5 i n c h e s f o r s lo w
t u r n i n g r a t e s , b u t a t h i g h t u r n i n g r a t e s t h e a d v a n ta g e
s h i f t e d t o a 2 .2 5 in c h h a n d w h e e l .
(3 ) The f o r c e s t h a t c a n b e o v e rc o m e a t d i f f e r e n t s p e e d s
o f r o t a t i o n f o r a t h r e e - i n c h h a n d w h e e l i s show n i n F ig u r e
2 - 5 . 16
( 4 ) The hum an o p e r a t o r s h o u ld n o t b e r e q u i r e d t o p e r fo rm
a t maximum c a p a c i t y f o r a n y g r e a t l e n g t h o f t i m e ; t h e r e f o r e ,1 7i t i s recom m endedx t h a t t h e f o l l o w i n g maximum a l l o w a b le
f o r c e s —43 p o u n d s f o r a 1 0 " d i a m e t e r h a n d w h e e l a n d 12 p o u n d s
f o r an 1 8 ” d i a m e t e r h an d w h ee l)—b e u s e d w hen d e s i g n in g c o n t r o l
s y s t e m s .

13
3 f t
30
I% 38oV8£ 1-0
8040
Revolution* per Minute
Figure 2-5: Range of individual d ifference* using * handvtiedl toovercone forces at d ifferen t rotation speed*. The shaded area represents the range o f Individual d ifferen ces , fron the noxious of the weakest subject to the naxlnun of the strongest.

14
2 . 4 . M a th e m a t ic a l R e p r e s e n t a t i o n o f t h e Human O p e r a t o r
P r e s e n t l y m any m e th o d s a r e e m p lo y e d t o m o d e l t h e p e r f o r m
a n c e s o f a human o p e r a t o r e n g a g e d i n c o m p e n s a to ry t r a c k i n g .
T h e s e m ode1b r a n g e i n c o m p le x i ty fro m l i n e a r t im e i n v a r i e n t
m o d e ls t o t h e m ore s o p h i s t i c a t e d o n e s u s i n g s t o c h a s t i c a n d
a d a p t i v e a p p r o a c h e s . The f o l lo w in g i s a d e s c r i p t i o n o f som e
o f t h e m o d e ls p r e s e n t e d t o d a t e .
2 .4 1 . L i n e a r C o n s ta n t C o e f f i c i e n t M o d e ls . E a r l y a t t e m p t s
a t m o d e lin g t h e hum an o p e r a t o r r e s u l t e d i n t h i s r e p r e s e n t a t i o n
by a g a in p l u s a t im e d e l a y :
G j^ S ) = K e x p ( - T S ) • ( 2 . 4 - 1 )
T hen i n 1947 A. T u s t in ,* ® w o rk in g t o im p ro v e th e a im in g o f
t a n k g u n s , a d d e d a d e r i v a t i v e a n d i n t e g r a l mode t o t h e m o d e l ,
r e s u l t i n g i n t h e f o l l o w in g e q u a t io n :
G ^ S ) = e x p ( - T S ) ( A S + B + C /S ). ( 2 . 4 - 2 )
T h is c o n c e p t h a s b e e n e x p a n d e d , u n t i l p r e s e n t l y a com m onlyr I Q O Q
u s e d hum an o p e r a t o r t r a n s f e r f u n c t i o n * h a s t h e f o l lo w in g
fo rm :
G ^(S ) = K ’ e x P < - T S > ( T lS + 1 ) ( 2 . 4 - 3 )(T n S + 1 )(T £ S + 1 )
w h e re
X = g a in

T s r e a c t i o n t im a
= l e a d c o m p e n s a tio n t im e c o n s t a n t
*n = n e u r o m u s c u la r l a g t im e c o n s t a n t
= l a g c o m p e n s a tio n t im e c o n s t a n t
The o p e r a t o r seem s t o b e a b l e t o a d j u s t t h e p a r a m e te r s
w i t h i n l i m i t s t o a c h ie v e b e t t e r c o n t r o l o f t h e s y s te m . I t h a s
a l s o b e e n s h o w n ^ t h a t i f o n e a t t e m p t s t o u s e th e m ore g e n e r a l
t r a n s f e r f u n c t i o n i t r e d u c e s t o
GjjCS) = K (T n S + D ( T i 2 s + 1 ) • • • ( Tl n s + ^ e x p ( - T S ) Sm(T2 i S + 1 ) ( T 2 2S + 1 ) . . . C T 2 p S + 1 )
W here (m + p ) > n (2.**-*♦)
t h e fo rm o f e q u a t i o n ( 2 .U - 3 ) w i t h n e g l i g i b l e c o n t r i b u t i o n s
f ro m h i g h e r o r d e r t e r m s .
B e c a u se t h e o p e r a t o r i s n o n l i n e a r , h i s a c t i n g c a n n o t be
c o m p le te ly d e s c r i b e d by a l i n e a r m o d e l. To c o m p e n sa te f o r1
t h i s , t h e t r a n s f e r f u n c t i o n p r e s e n t e d i n e q u a t io n (2 .> t-3 ) can
b e m o d i f i e d by a d d in g a re m n a n t te r m N ( t ) . A b lo c k d ia g ra m
o f s u c h a m o d e l i s show n i n F ig u r e 2 - 6 .
M ost t e c h n iq u e s em p lo y ed t o d e te r m in e t h e p a r a m e te r s
a p p e a r in g i n t h e q u a s i - l i n e a r m odel a r e a fo rm o f l i n e a r i z a t i o n
i n w h ic h t h e re m n a n t i s m in im iz e d . The hum an o p e r a t o r i s
p l a c e d i n a c o n t r o l lo o p a n d r e q u i r e d t o t r a c k t h e i n p u t t o
t h e b e s t o f h i s a b i l i t y . H is i n p u t a n d o u t p u t a r e r e c o r d e d

Huaan Operator
R iT )
i Controlled Eleaent
c mLinear Model
P Gp(T)Output
Gf(T)Feedback Eleaent
Figure 2-6 Describing Function Block Dlagraa

f o r a n a n a l y s i s . I f a s i n u s o i d a l i n p u t o f d i f f e r e n t f r e q u e n
c i e s i s u s e d , b o d e p l o t s c a n b e u s e d t o d e te r m in e th e m o d e l.
I n t h e c a s e w h e re a s t a t i o n a r y ran d o m s i g n a l i s u s e d f o r t h e
i n p u t , t im e s e r i e s a n a l y s i s c a n b e e m p lo y e d . F i n a l l y , a c t u a l
t r a c k i n g d a t a c a n b e u s e d i f a n o p t i m i z a t i o n p r o c e d u r e i s
u s e d t o s e l e c t a s e t o f p a r a m e te r s w h ic h m in im iz e s a c o s t
f u n c t i o n b a s e d on t h e o u t p u t o f t h e o p e r a t o r a n d th e m o d e l.
The i n t e g r a l o f s q u a r e d e r r o r ( I S E ) :
i s a com m only u s e d c o s t f u n c t i o n . T h is t e c h n iq u e i s i l l u s
t r a t e d i n F ig u r e 2 - 7 .
T he " l i n e a r c o r r e l a t i o n " ( r a t i o o f l i n e a r l y c o r r e l a t e d
o u t p u t t o a c t u a l o u t p u t ) i s a b o v e o .9 f o r lo w f r e q u e n c y i n p u t s .
T he c o r r e l a t i o n d e c r e a s e s a s t h e t a s k c o m p le x i ty i n c r e a s e s an d
a s t h e b a n d w id th o f t h e i n p u t i n c r e a s e s .
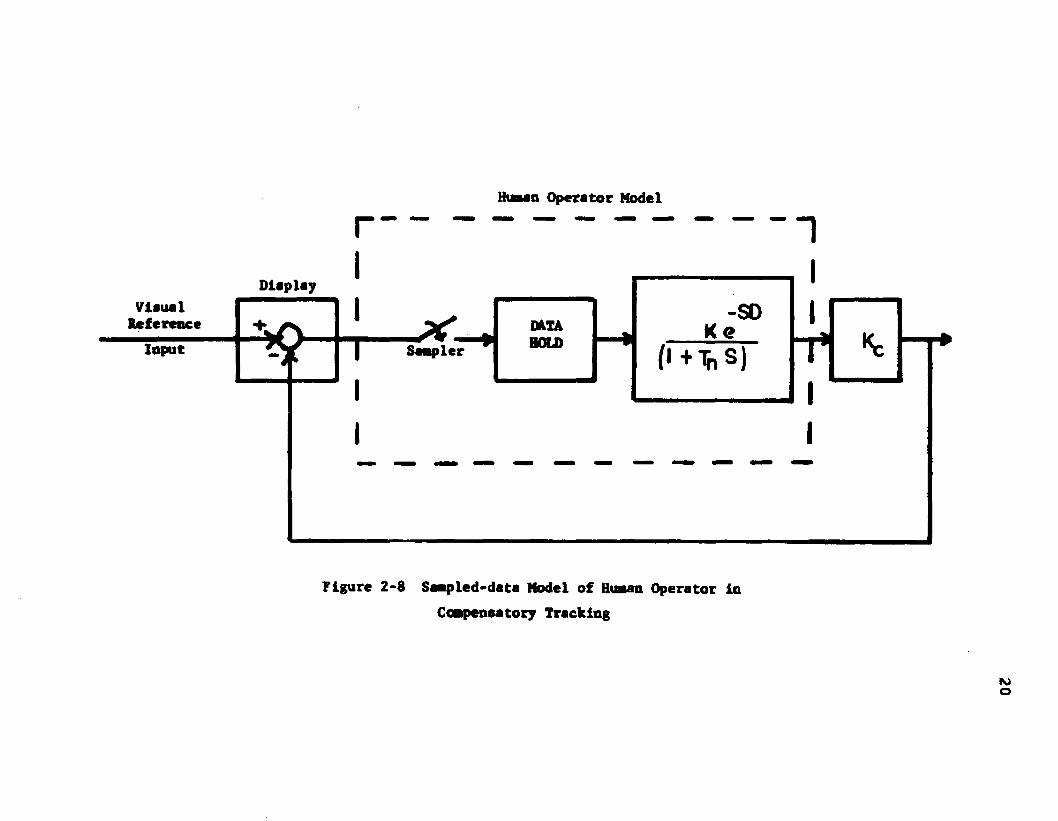
2 .U 2 . S a m p le -D a ta M o d e ls . T h e re e x i s t s som e d i f f e r e n c e s
o f o p i n i o n r e g a r d i n g t h e way i n w h ic h a man c a r r i e s o u t a
t r a c k i n g t a s k , a s t o w h e th e r h e o p e r a t e s a s a c o n t in u o u s o r a s
IS E = f t f (CH( t ) - CM( t ) ) 2 d t t o
(2 .* * -5 )
w h e re = r e c o r d e d hum an o u t p u t
CM( t ) = m odel o u t p u t
t o = i n i t i a l t im e
t f = f i n a l t im e

18
RECORDED
am
OPTIMIZATION
A c re : (^ ( t ) * Recorded hunen outputCg ( t ) * Linear nodal outputM(t) ■ i i u n t L d ifferen t between two outputs Coat “ Coat function
The o p tin lsa tlo n procedure adjusts model parameter based on cost functions iron previous runs to minimise the rasmant.
Figure 2-7 Typical letu p for Remnant Minimization

19
a d l a o r a t a p e r f o r m e r . Some o f t h e e x p e r i m e n t a l e v id e n c e w h ic h
te n d e t o i n d i c a t e d i s a r e t e b e h a v i o r a r e t h e f a c t s t h a t t h e
t im e d e l a y o f a n o p e r a t o r c a n b e r e p r e s e n t e d b y a sa m p le h o ld
o p e r a t i o n a n d t h a t a human o p e r a t o r i s u n a b le t o r e s p o n d t o
t h e s e c o n d o f tw o c l o s e l y - s p a c e d s t i m u l i . B eck ey 2 3 * 2 4 * 25
t h o r o u g h ly e x a m in e d t h e e a r l i e r s a m p le d - d a ta m o d e ls a n d p r o
p o s e d a s im p le m o d e l o f h i s ow n. I n t h e l a t t e r o f t h e r e f e r
e n c e d a r t i c l e s , B eck ey p r o p o s e d a s y s t e m a t i c t e c h n iq u e f o r
e s t i m a t i n g t h e s a m p lin g f r e q u e n c y . E ven s o , t h e s y n t h e s i s o f
s a m p le d - d a ta m o d e ls o f hum an c o n t r o l l e r s i s d e f i c i e n t i n t h e
a r e a o f p a r a m e te r e s t i m a t i o n . The m o d el i s i l l u s t r a t e d i n
F ig u r e 2 - 8 .
2 . i ( 3 . A d a p t iv e M anual C o n t r o l ■ F ig u r e 2 .9 i l l u s t r a t e s
t h e f o u r m a jo r c a t e g o r i e s o f a d a p t i v e c o n t r o l . 2 ® T h e se c a t e -
g o r i e s a r e :
( 1 ) I n p u t a d a p t io n a n d p r e d i c t i o n w h ic h c o n s i d e r s t h e
a b i l i t y o f t h e hum an o p e r a t o r t o r e c o g n i z e r e p e a t e d i n p u t
p a t t e r n s a n d t r a c k t h i s i n a n o p e n lo o p m a n n e r;
( 2 ) C o n t r o l e le m e n t a d a p t a t i o n , w h ic h r e f e r s t o t h e
a b i l i t y o f a hum an t o c h a n g e h i s c o n t r o l s t r a t e g y due t o
c h a n g in g s y s te m d y n a m ic s ;
( 3 ) T ask a d a p t a t i o n , w h ic h i n c l u d e s t h e o p t i m i z a t i o n o f
t h e c o n t r o l lo o p b a s e d o n some p r e d e t e r m in e d c o s t f u n c t i o n ;
( 4 ) P rogram m ed a d a p t a t i o n o r o p e n lo o p a d a p t i v e c o n t r o l ,
w h ic h e n c o m p a s s e s t h e c h a n g e i n c o n t r o l s t r a t e g y b a s e d on
VisualReference
Input
Htaun Operator Model
Display
Figure 2-8 Sanpled-data Model o f Hunan Operator in Conpensatory Tracking

INPUTADAPTATION
Disturbance
ADAPTIVE MANUAL
CONTROLLER
ControlObjeotlves^ TASK
ADAPTATION ADAPTATION
la v lr i n t i lS ta tu
n d Tine
Fugure 2-9 Major Adaptive Functions In Manual Control

22
environment a l s ta tu s , suoh as wind v e lo c ity , road co n d itio n s,
and other s itu a t io n s which tha oparator has learned to com
pensate.
A good example o f th is approach to system mods l in g i s
the adaptive nodal o f tfents^? which i s a lin e a r model o f
f ix ed fora;
GhtS) - Ko . e ~ T S (AoS + 1)____________ (2 .4 -5 )
(TnS + 1) (TAs + 1 )
where Ko ***<* \> ar* autom atically adjusted by a s te e p e s t
descent procedure.
2 .4 4 . Multi-Modal Models. L. 6 . Fogsl28 in h is te x t ,
B iotechnologyi Concepts and A p p lica tion s, su ggests th a t i t
might be p o ss ib le to subdivide the human operation in to a
mutually ex c lu s iv e s e t o f modes, each corresponding to a par
t ic u la r region on the phase plane formed by the error s ig n a l
and i t s d e r iv a tiv e . Such an approach should r e s u lt in lower
order tran sfer functions fo r the in d iv id u a l modes and s t i l l
provide good tracking behavior when applied seq u en tia lly as
a group. He su ggests th a t the fo llow in g s e t o f modes might
work (although he did not pursue th is approach any fu r th er ):
Mode 1 . Reaction; No motor output.
Mode 2 . A cq u isition ; Mode which i s tr iggered by any error and/or error ra te o u tsid e the tracking mode domain. The purpose i s to rapid ly minimize erro r . This may cause overshoot.
Mode 3 . Tracking; The in te n t i s to zero the error .

23
Mode 4 . S y n c h ro n is m : T h is i s t r i g g e r e d by p e r c e p t i o no f som e i n v a r i e n t w ave fo rm i n t h e i n p u t s i g n a l . The o p e r a t o r a c t s a s an i n d e p e n d e n t g e n e r a t o r d u r i n g t h e t r a c k i n g m ech an ism s an d m o n i to r s t h e i n p u t s i g n a l .
Mode 5 . S te a d y S t a t e T re m o r: O n ly when i n t r e m o r d o m a in .
Mode 6 . R e a s s u r a n c e : A r t i f i o a l l y t r i g g e r e d b y t h e hum ano p e r a t o r i n o r d e r t o d e te r m in e d e f e n s i v e s v s te m q u a l i t y b y f e e d b a c k ; i t c a n o c c u r i n e i t h e r t h e t r e m o r o r t r a c k i n g s t a t e .
L i t t l e w ork h a s b e e n d o n e i n t h i s a r e a , w i t h t h e e x c e p t i o n
o f th e tw o mode m o d e ls w h ic h h a v e j o i n e d a s u r g e m o d e l t o a
c o n s t a n t c o e f f i c i e n t t r a c k i n g m o d e l. A good e x am p le o f t h i s 29 30i s C o s t e l l o ' s * s u r g e m o d el w h ic h a l lo w s d i s c o n t i n u o u s a s
w e l l a s c o n t in u o u s i n p u t s .
I n t h e s u r g e m o d e l , C o s t e l l o h a s u s e d t h e t r a d i t i o n a l
s e c o n d - o r d e r c o n s t a n t c o e f f i c i e n t m o d e l:
® h(S) = K e - T S (1 + Tl S ) ^(1 + STn ) (1 - STX)
w h e re TI s = hum an o p e r a t o r l a g t im e c o n s t a n t
Tx = 0 .5 = hum an o p e r a t o r l e a d t im e c o n s t a n t
Tn = 0 .2 = n e u ro m u s c u la r l a g t im e c o n s t a n t
T = 0 .1 5 = d e la y t im e
c o u p le d w i th a n o p t im a l m in im a l t im e f o r c i n g f u n c t i o n c a l c u
l a t e d w i th r e s p e c t t o s e c o n d - o r d e r l im b d y n a m ic s , t h i s f o r c i n g
f u n c t i o n d r i v e s t h e e r r o r a n d i t s d e r i v a t i v e t o t h e o r i g i n
b e f o r e a d d i t i o n a l c o r r e c t i o n i s m ad e . T he s u r g e m odel i s
e m p lo y e d when t h e f o l lo w in g i n e q u a l i t y e x i s t s :

24
1 -0 * ® o< t) ♦ 0 . 0 1 . - e 0 (T ) 0 .2 S ( 2 .4 - 7 )
The s u r g e m odel o f C o s t e l l o I s show n i n F ig u r e 2 - 1 0 .
2 .4 5 . A p p l i c a t i o n o f O p t i m i z a t io n T e c h n iq u e s I n t h e
H an -M ach in e S y s te m . I n g e n e r a l , m o s t o f t h e a p p l i c a t i o n s o f
o p t i m i z a t i o n i n m a n u a l o o n t r o l s y s te m s h a v e b e e n c e n t e r e d a ro u n d
d e te r m in in g m odel p a r a m e te r s w h ic h p r o v id e a " b e s t f i t " human
o p e r a t o r t r a n s f e r f u n c t i o n . A n o th e r a p p l i c a t i o n o f o p t i m i z a t i o n
c a n b e fo u n d i n t h e a r e a o f f i l t e r i n g a n d p r e d i c t i o n o f i n p u t
s i g n a l s . A t h i r d a r e a o f o p t im a l c o n t r o l a p p l i c a t i o n i s t h a t
o f d e te r m in in g s w i t c h i n g c u r v e s f o r o p t im a l f o r o i n g f u n c t i o n s .
T h is t e c h n iq u e w as u s e d i n d e v e lo p in g t h e s u r g e m o d e l.
2 .4 6 . O th e r M o d e ls . As s t a t e d b e f o r e , n o d e f i n i t e
m o d e l o f t h e hum an o p e r a t o r e x i s t s . I n s t e a d , t h e r e i s a v a r i e t y
o f m o d e ls , e a c h s te m m in g f ro m v ie w in g t h e o p e r a t o r f ro m a d i f
f e r e n t p o i n t o f v ie w . Some o f t h e o t h e r m o d e lin g t e c h n i q u e s ,
n o t p r e v i o u s l y m e n t io n e d , i n c l u d e n o n l i n e a r m o d e l in g , s t o c -
a s t i c m o d e l in g , a n d m u l t i p l e r e g r e s s i o n .

r (t )a<»)
Display
Contactor:Opoaa When fx(t-r) 0Closed Otherwise
Sugge-ModeModal
e ^ t )
ModalSelector
«2(t)
Continuous- Mode Model
c t ( t )
C j( t)
Figure 2-10 C oste llo 's Dual-Mode Model
SJUt

CHAPTER I I I
TRACKING SYSTEM DESCRIPTION
3 .1 . I n t r o d u c t i o n
T he m an -m ac h in e s y s te m s i m u la t e d c o n s i s t s o f l i n e - o f -
s i g h t t r a c k i n g by tw o hum an o p e r a t o r s w i th o n e a c t i n g to
r e d u c e t h e a z im u th e r r o r , w h i l e t h e o t h e r a c t s t o r e d u c e th e
e l e v a t i o n e r r o r . The c o n t r o l l e d e l e m e n t , an a n t i a i r c r a f t g u n ,
i s a p p ro x im a te d by a n o n l i n e a r s e c o n d - o r d e r m o d e l, a n d t h e
e r r o r s i g n a l i s r e p r e s e n t e d b y t h e a n g u l a r m is a l ig n m e n t a s
v ie w e d t h r o u g h t h e g u n 's s i g h t i n g s y s te m . I n a d d i t i o n t o
m o d e lin g t h e g u n an d d e v e lo p in g a c o o r d i n a t e s y s te m w h ic h
f a c i l i t a t e s t h e c a l c u l a t i o n o f a im e r r o r s , t h e gun p a r a m e te r s
a n d t a r g e t f l i g h t p a th s a r e d e s c r i b e d i n t h i s c h a p t e r .
3 .2 . The Gun M odel
P r o b a b ly t h e s i m p l e s t d y n am ic m o d el t h a t c a n b e u s e d t o
r e p r e s e n t t h e gun s y s te m i s t o c o n s i d e r i t a s a t w o - t o r t i o n a l
s y s te m , a s show n i n F ig u r e 3 - 1 . T hen t h e m o tio n o f t h e gun
in a z im u th a n d e l e v a t i o n may b e r e p r e s e n t e d b y :
26

0 AXIS OF ROTATION
TOP VIEW
e AXIS OF ROTATION
SIDE VIEW
FIGURE » GUN MODEL

w h e re
*z a a n g u l a r gun p o s i t i o n i n e l e v a t i o n p la n e
0g = a n g u l a r gun p o s i t i o n i n a z im u th p l a n e
= to r q u e a p p l i e d t o move gun i n e l e v a t i o n p la n e
= to r q u e a p p l i e d t o move gun i n a z im u th p l a n e
= m om ent o f i n e r t i a a b o u t t h e ^ a x i s o f r o t a t i o n
J f = m oment o f i n e r t i a a b o u t t h e 9 a x i s o f r o t a t i o n
a d r a g ( f r i c t i o n ) c o e f f i c i e n t i n a z im u th m ovem ent
B f a d r a g ( f r i c t i o n ) c o e f f i c i e n t i n e l e v a t i o n m om ent.
The e q u a t i o n s f o r t h e gun s i m u l a t i o n w e re o b t a i n e d by
a p p ly i n g t h e hum an o p e r a t o r o u t p u t , t o r q u e , t o a m e c h a n ic a l ly
s t i f f (K a o) r o t a t i o n a l s y s te m w h ic h c a n b e r e p r e s e n t e d b y :
J d 2W + B dW + KW a T ( t ) d t
( 3 . 2 - 3 )
w h e re
W a a n g u l a r d i s p l a c e m e n t
K a s t i f f n e s s c o e f f i c i e n t .
The e v a l u a t i o n o f t h e s e gu n p a r a m e te r s i s s t r a i g h t
f o r w a r d , s i n c e g o o d e s t i m a t i o n s f o r maximum a n g u l a r v e l o c i t y31an d a n g u l a r a c c e l e r a t i o n f o r t h i s gun a r e a v a i l a b l e a n d th e

29
maximum t o r q u e t h a t an a v e r a g e hum an o p e r a t o r w i l l e x e r t on
a h a n d w h e e l i s a p p r o x im a te ly 10 f t - l b s . S in c e t h e maximum
a c c e l e r a t i o n w i l l o c c u r when t h e gun i s m oved f ro m a r e s t p o s i
t i o n , w h e re ( d ^ g / d t ) i s z e r o , t h e moment o f i n e r t i a i s e a s i l y
d e te r m in e d fro m E q u a t io n 3 .1 - 1 a s :
I n a s i m i l a r m a n n e r , t h e d r a g - c o e f f i c i e n t , , may be
c a l c u l a t e d e a s i l y s i n c e t h e maximum v e l o c i t y w i l l o c c u r a s
t h e gun i s t u r n i n g w i th z e r o a c c e l e r a t i o n . T h u s ,
t h e s y s te m h a s r e l a t i v e l y p o o r s t a b i l i t y . T h is w i l l b e d i s
c u s s e d f u r t h e r i n S e c t i o n 3.H a n d j u s t i f i c a t i o n f o r th e v a lu e s
t h a t w e re u s e d i n t h e s i m u l a t i o n a r e g iv e n .
3 .3 C a l c u l a t i o n o f A lig n m e n t E r r o r s
The e q u a t i o n s u s e d t o d e f i n e t h e a n g u l a r m is a l ig n m e n t a s
v ie w e d th r o u g h t h e g u n 's s i g h t i n g s y s te m a r e d e v e lo p e d i n t h i s
s e c t i o n . S t a r t i n g w i t h t h e a im in g p o i n t , l o c a t e d in t h e
i n e r t i a l c o o r d i n a t e s y s te m , w h e re t h e gun i s l o c a t e d a t t h e
max
10 ft-lbs. 17057“ Raa/sec 10 f t - l b - s e c ( 3 .2 - 5 )
H o w ev er, i f t h e s e v a lu e s a r e u s e d i n c o n j u n c t i o n w i th32th e l i n e a r o p e r a t o r p a r a m e t e r s , a s p r o p o s e d by C o s t e l l o ,

30
o r i g i n , t h e g u n ’ s a n g u l a r a l ig n m e n t c a n b e d e s c r i b e d fro m an
a im in g v e c t o r p o s e d th r o u g h t h e tw o p o i n t s ( s e e F ig u r e 3 - 2 ) .
T he e q u a t i o n s f o r t h e g u n 's a n g u l a r p o s i t i o n a r e :
w h e re
0 = e l e v a t i o n a n g le
6 = a z im u th a n g le
( x , y , z ) = l o c a t i o n o f a im p o i n t i n i n e r t i a l c o o r d i n a t es y s te m .
H o w ev er, i n t h e c o m p e n s a to ry t r a c k i n g s y s te m th e o p e r a t o r
d o e s n o t u s e t h e a z im u th a n d e l e v a t i o n a n g l e s ; i n s t e a d , h e v ie w s
t h e t a r g e t th r o u g h t h e g u n 's s i g h t i n g s y s te m ( s e e F ig u r e 3 -3 )
a n d t r a c k s b a s e d on t h e a l ig n m e n t e r r o r d e te r m in e d b y com
p a r i n g t h e t a r g e t t o t h e c r o s s e d - h a i r s i n t h e g u n 's s i g h t .
T h is s i g h t i n g e r r o r c a n b e e x p r e s s e d i n te rm s o f an a n g u l a r
m is a l ig n m e n t , by d e f i n i n g a gun c o o r d i n a t e s y s te m w h ic h h a s i t s
p o s i t i v e Xg a x i s c o i n c i d e n t w i th t h e a im in g v e c t o r o f t h e a n t i
a i r c r a f t g u n . The e q u a t i o n s r e l a t i n g t h e t a r g e t p o s i t i o n i n
t h e i n e r t i a l c o o r d i n a t e s y s te m an d i t s p o s i t i o n i n t h e gun
c o o r d i n a t e s y s te m c a n b e o b t a i n e d b y r o t a t i n g t h e i n e r t i a l
c o o r d i n a t e s y s te m th r o u g h a n g le s ^ a n d 0 . T h e se e q u a t io n s
a n d t h e i r d e r i v a t i v e s a r e p r e s e n t e d i n A p p e n d ix A. B a se d on
( 3 .3 - 1 )
a n d 6 ( 3 .3 - 2 )

AIM POINT
GUN LOCATION
e(+)
FIGURE 3-2GUN POSITION IN INERTIAL COORDINATE SYSTEM

c+
PATH OF PU N E WITH GUN HILO STHI (LEFT ID RIGHT TRACKING)
TARGET AT TIME T
H AZIMUTH ERROR
(+) ELEVATION ERROR AIM POINT
FIGURE 3-3 SITE PATTERN GUN COORDINATE SYSTEM
FIGURE 3-4ANGLE MISALIGNMENT GUN COORDINATE SYSTEM

33
t h e gun c o o r d i n a t e p o s i t i o n o f t h e t a r g e t , t h e a n g u l a r m is
a l ig n m e n t e r r o r s c a n be c a l c u l a t e d a s show n b e lo w :
The a l ig n m e n t e r r o r s E l a n d E2 a r e i l l u s t r a t e d I n F ig u r e 3 - 4 .3 .4 . Gun P a r a m e te r D e te r m in a t io n
I n t h i s s e c t i o n t h e v a lu e s f o r t h e moment o f i n e r t i a
an d t h e dam ping c o e f f i c i e n t a r e d i s c u s s e d . The v a lu e s u s e d
i n S tu d y 1 h a v e b e e n c h o se n i n s u c h a way a s t o y i e l d a s t a b l e
b u t r e a l i s t i c t r a c k i n g s y s te m .
Some i n d i c a t i o n o f t h e g e n e r a l n a t u r e o f e a c h c o n t r o l
lo o p may b e o b t a i n e d b y n e g l e c t i n g t h e t r a n s f o r m a t i o n m a t r ix
( t h u s m ak ing t h e s y s te m l i n e a r a n d n o n - i n t e r a c t i n g ) an d
f o r m u la t i n g a s i n g l e c o n t r o l l o o p , a s show n i n F ig u r e 3 -5 . The
hum an o p e r a t o r h a s b e e n r e p r e s e n t e d b y t h e t r a d i t i o n a l s e c o n d -
o r d e r c o n s t a n t c o e f f i c i e n t m o d e l:
( 3 . 3 - 3 )
an d
w h e re
( 3 .3 - 4 )
= e l e v a t i o n e r r o r
E j = a z im u th e r r o r
( x ff, y , z ) = l o c a t i o n o f t a r g e t i n gun c o o r d i n a t e s y s te m 6 © S .
G^CS) = K<TLS- + 1 ) e x p ( - r S )
Tn S + 1 ) (T jS + 1 )( 3 .4 - 1 )

\ / ■Ny E(s) K(Tt s + I) T(s) i / j
(Desired v . J (Error) Tfi s + l)(T t s + 1) (Torque)S(S + B/J)
Aim Point) .
Gun S y i t «
Figure 3-5 Sim plified Tracking System

35
w h e re
*■3 H II 10
Tn = .2
n .5
F o r t h i s a n a l y s i s t h e t im e d e la y o f t h e hum an o p e r a t o r w as
a l s o n e g le c t e d } a l th o u g h i t c o u ld h a v e b e e n a p p ro x im a te d by
a P ade a p p r o x im a t io n .
From t h e b l o c k d ia g ra m , o n e c a n f o r m u la te a r o o t l o c u s
d ia g ra m i n o r d e r t o i n v e s t i g a t e s y s te m s t a b i l i t y . Such a
d ia g ra m i s show n i n F ig u r e 3 - 6 , w i th t h e v a lu e s o f t h e p a r a
m e te r s i n d i c a t e d .
As mAy'bte s e e n ' i n F ig u r e 3 - 6 , t h e s y s te m w i l l q u i c k l y go
u n s t a b l e a s t h e v a lu e o f t h e g a in c o n s t a n t , K, i s i n c r e a s e d .
The p r e d o m in a n t p a i r o f r o o t l o c i q u i c k l y l e a v e t h e r e a l a x i s
o f t h e c o m p lex p l a n e a n d c r o s s t h e im a g in a r y a x i s i n t o t h e
r i g h t - h a n d p l a n e , i n d i c a t i n g an u n s t a b l e s y s te m .
When c e r t a i n s y s te m p a r a m e te r s a r e c h a n g e d , a s i n d i c a t e d
i n F ig u r e 3 - 7 , much b e t t e r s y s te m p e r fo r m a n c e i s o b s e r v e d .
H e re t h e p r e d o m in a n t l o c i c r o s s t h e im a g in a r y a x i s i n t o th e
r i g h t - h a n d p la n e a t a much h i g h e r g a in c o n s t a n t . F o r t h i s
r e a s o n , th e l a t t e r s e t o f p a r a m e te r s w as u s e d i n t h e f i r s t s e t
o f o p e r a t o r s t u d i e s .
T h e se p a r a m e te r s n e c e s s i t a t e d t h e i n c l u s i o n o f l i m i t e r s
i n t h e g u n m o d e l s o t h a t maximum a c c e l e r a t i o n a n d s le w r a t e s

AXIS
I 10. 0I 2 0 . 0
1 3 0 . 0
. U A L 4 AXIS-4 •»
Figure 3 -0 Root L o cu s D iagram o f S i m p l i f i e d Tr a c k i ng S ystem - 1
uO)

r
0.50.21.0
16.05 .0
f O
Figure 3*7 Root Locus Diagram of S im plified Tracking System-II
u■si

38
w o u ld n o t be e x c e e d e d . T h e r e f o r e , o n e c h a n n e l o f t h e gun
s y s te m ( a z im u th ) a s f i n a l l y m o d e le d i s show n i n F ig u r e 3 -8 .
The o t h e r c h a n n e l i n S tu d y 1 i s i d e n t i c a l and t h e r e f o r e i s
n o t show n .
I n a d d i t i o n t o v e r i f y i n g t h e hum an o p e r a t o r m odel w i th
t h e s y s te m d e v e lo p e d i n t h i s s e c t i o n , tw o a d d i t i o n a l s y s te m s
w e re a v a i l a b l e .^ 3 A l l t h r e e o f t h e gun s y s te m s u t i l i z e th e
m odel i l l u s t r a t e d i n F ig u r e 3 - 8 . The n o n l i n e a r d i f f e r e n t i a l
e q u a t i o n s u s e d t o d e s c r i b e t h e s y s te m a r e :
® L im = % <T# ( t > - lA im >
an d
^ = z l (T, ( t ) - . ) ( 3 .4 - 3 )Lim * * L i m
w h e re
0 L im = l i m i t e d e l e v a t i o n a n g u l a r v e l o c i t y —0 L im = l i m i t e d e l e v a t i o n a n g u l a r a c c e l e r a t i o n 0
8 Lim = l i m i t e d a z im u th a n g u l a r v e l o c i t y 00
0 Lim = l i m i t e d a z im u th a n g u l a r a c c e l e r a t i o n
T ^ ( t ) = e l e v a t i o n t o r q u e
T p ( t ) = a z im u th to r q u e
= e l e v a t i o n d am p in g c o e f f i c i e n t
= a z im u th d am p in g c o e f f i c i e n t
= e l e v a t i o n moment o f i n e r t i a
= a z im u th moment o f i n e r t i a
w i th t h e o n ly d i f f e r e n c e i n t h e e q u a t io n s b e in g t h e v a lu e s o f

* Moment o f in c r taBg ■ Drag c o e ff ic ie n t
a ■ Laplace transform variable
Figure 3-8 Gun Model (Azimuth Channel) with Limiters

<40
t h e dam p ing c o e f f i c i e n t s a n d m om ents o f i n e r t i a . The gun
p a r a m e te r s f o r t h e t h r e e s y s te m s a r e g iv e n i n T a b le 2 .
3 .5 . I n p u t S i g n a l D e s c r i p t i o n
T he i n p u t s i g n a l s u s e d i n t h i s s t u d y a r e made up o f t h e
t r a j e c t o r i e s o f a i r c r a f t f l y i n g a t low a l t i t u d e s a n d h ig h
s p e e d s . The p o s i t i o n o f an a i r c r a f t , e n t e r e d i n t o t h e s im u
l a t i o n a s a f u n c t i o n o f t i m e , a lo n g w i th t h e a n g u l a r p o s i t i o n
o f th e g u n , i s u s e d t o c a l c u l a t e t h e a im in g e r r o r d e s c r i b e d
i n S e c t i o n 3 .3 , I t i s t h i s a im in g e r r o r w h ic h i s f e d b a c k t o
t h e o p e r a t o r .
T h e re a r e tw o t y p e s o f f l i g h t p a th s u s e d i n t h i s s t u d y .
The f i r s t ty p e c o n s i s t s o f s t r a i g h t an d l e v e l f l y - b y s . T h e se
f l i g h t p a th s a r e d e s c r i b e d i n T a b le 3 . The s e c o n d ty p e o f
f l i g h t p a th s u s e d i n t h i s s tu d y a r e f a r d i f f e r e n t fro m th e
low l e v e l f l y - b y f l i g h t s . The f l i g h t p a t h s a r e c h a r a c t e r i z e d
by s h a r p t u r n s , d iv e s a s s t e e p a s 6 0 ° a n d f a s t c l i m b s , p u l l i n g
a s h ig h a s 5 g * s on t h e a i r c r a f t . T h ese f l i g h t p a th s a r e
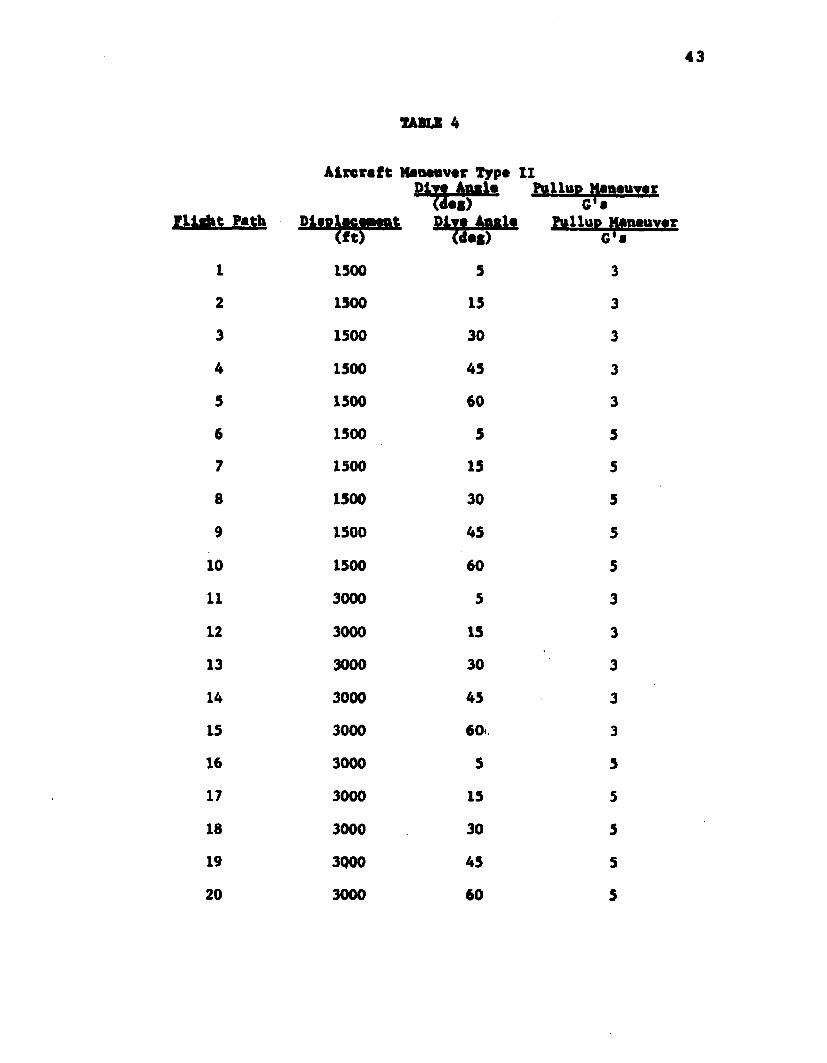
i n d i c a t e d i n T a b le <4. I n b o th c a s e s t h e f l i g h t p a t h s w ere
a l i g n e d i n t h e i n e r t i a l c o o r d i n a t e s y s te m s u c h t h a t th e minimum
d i s t a n c e t o t h e g u n , a t c r o s s o v e r , o c c u r r e d a f t e r 20 s e c o n d s o f
f l i g h t .
A b e t t e r r e p r e s e n t a t i o n o f t h e m an e u v e rs may b e g a in e d
fro m F ig u r e s 3 - 9 , 3 - 1 0 , 3 - 1 1 , a n d 3 - 1 2 , w h ic h p r e s e n t a p e r
s p e c t i v e p r o j e c t i o n o f f l i g h t p a t h s 1 0 2 , 1 , 3 , a n d 5 r e s p e c t
i v e l y . The r e m a in d e r o f t h e f l i g h t p a t h p r o j e c t i o n s p lu s a
d e s c r i p t i o n o f t h e p ro g ra m u s e d t o d raw t h e p e r s p e c t i v e

41
TABLE 2
Gun P a r iM tin
TernsStudy#1
Values for Study #2
Study#3 Units
B* 16 25.09 30.21 ft- lb -se c /r a d
"8 16 16.29 25.21 ft- lb -se c /r a d
J0 5 .247 .8007 f t - lb - s e c 2
Je 5 .1634 3.088 f t - lb - s e c 2
^L1b .384 .384 .384 rad/sec
*Lin .349 .349 .349o
rad/sec
*11Lin 1.065 1.065 1.065 rsd/aec
V .349 .349 .3492
rad/sec

42
TABLE 3
A ircraft Maneuvers Type I
F ligh t Path V elocity Plsplacenent A ltitude( f t /e e c ) ( f t ) ( f t )
101 760 600 375
102 760 1800 375
103 760 2700 375
43
TABLE 4
A ircraft Maneuver Type II
EMjfr* Pft.ft* Plcplaca—at( f t )
I 1500
2 1500
3 1500
4 1500
5 1500
6 1500
7 1500
8 1500
9 1500
10 1500
11 3000
12 3000
13 3000
14 3000
15 3000
16 3000
17 3000
18 3000
19 3000
20 3000
Dive Anale Pullup Maneuver
5 3
15 3
30 3
45 3
60 3
5 5
15 5
30 5
45 5
60 5
5 3
15 3
30 3
45 3
60 3
5 5
15 5
30 5
45 5
60 5

Figure 3 - i Perspective Projection of F light Path do. 102

10000' -I z
5000* -
-2000
Projection onto X-Y Plane
Figure 3-10 Perspective Projection o f F light Path Ho. 1

10000
5000
1000
2000Projection onto X-Y Plane
Figure 3-11 Perspective Projection o f F ligh t Path No. 5

10000
5000'
1000
2000Projection onto X-Y Plane
Figure 3-12 Perspective Projection o f Fight Path No. 10

48
p r o j e c t i o n s c a n b e fo u n d i n A p p e n d ix B. The c o m p u te r p ro g ra m
i s l i s t e d i n A p p e n d ix C.
3 .6 . S e n s i t i v i t y A n a ly s i s o f t h e Gun S y s te m s
The w o rk i n t h i s s e c t i o n f u r t h e r d e m o n s t r a te s t h e s t a b i l i t y
o f t h e t h r e e t r a c k i n g s y s te m s s t u d i e d i n t h i s p a p e r . Due t o
th e n o n l i n e a r i t i e s o f t h e hum an o p e r a t o r m odel ( S e c t i o n 5 . 2 - 2 ) ,
t h e g un m odel ( S e c t i o n 3 .2 ) a n d t h e e r r o r d i s p l a y s y s te m
( S e c t i o n 3 . 3 ) , a n a l y t i c a l m e th o d s o f s t a b i l i t y a n a l y s i s h a v e
b e e n e l i m i n a t e d , t h u s l e a v i n g d i r e c t s i m u l a t i o n a s a p o s s i b l e
m eans f o r s t u d y i n g s y s te m s t a b i l i t y .
S e v e r a l f a c t o r s w h ic h h e lp t o s i m p l i f y t h e s tu d y a r e :
1 . A l l t h r e e gun s y s te m s s t u d i e d u t i l i z e t h e sam e
m o d e l; o n ly t h e v a lu e s o f B a n d J c h a n g e .
2 . The e l e v a t i o n c h a n n e l i n a l l t h r e e s y s te m s i s
h i g h l y o v e rd a m p e d , t h u s m ak in g i t u n n e c e s s a r y t o
s t u d y t h e e l e v a t i o n c h a n n e l .
3 . A l l t h r e e s y s te m s u s e t h e sam e d i s p l a y s y s te m .
4 . The p a r a m e te r s i n t h e o p e r a t o r m odel d e v e lo p e d i n
S e c t i o n 5 . 2 - 2 , w i th t h e e x c e p t i o n o f P 3 w h ic h i s s e t
e q u a l t o B , a r e i d e n t i c a l f o r th e t h r e e t r a c k i n g
s y s t e m s .
P o i n t s f ro m t h e p l a n e fo rm e d b y p l o t t i n g B v e r s u s J
w e re s e l e c t e d , t h u s c r e a t i n g d i f f e r e n t gun c o n f i g u r a t i o n s .
T h e se s y s te m s w e re t h e n t e s t e d b y c a l c u l a t i n g t h e a l ig n m e n t
e r r o r f o r tw o a i r c r a f t e n c o u n t e r s : F l i g h t P a th s 101 a n d 1 0 2 .

T he d i g i t a l s i m u l a t i o n p r e s e n t e d i n C h a p te r 5 w as u s e d a n d
i n b o th e n c o u n t e r s t h e d e t e r m i n a t i o n o f s y s te m s t a b i l i t y w as
made b y v i s u a l l y o b s e r v in g p l o t s o f t h e t r a c k i n g e r r o r g e n e r a t e d
d u r in g t h e s i m u l a t i o n . A s y s te m w as c o n s i d e r e d t o b e u n s t a b l e
when e i t h e r t h e t r a c k i n g e r r o r g rew e x p o n e n t i a l l y o r s u s t a i n e d
o s c i l l a t i o n s o c c u r r e d . The p l o t s fro m tw o u n s t a b l e s y s te m s
a r e shown i n F ig u r e 3 -1 3 .
R e s u l t s o f t h e s tu d y a r e g iv e n i n F ig u r e 3 -1 4 , A l l t h r e e
s y s te m s s t u d i e d i n t h i s p a p e r f a l l w e l l i n t o t h e s t a b l e r e g i o n .
The f i g u r e a l s o show s t h a t t h e r e g i o n o f u n s t a b i l i t y i s l a r g e r
f o r F l i g h t P a th 1 0 1 .

•iqsi
sun
OMi
jo|
••A
in3
••uo
d«»y
SK
u
>4U
e n n o ft
Em
m
M
OS

51
Region of In s ta b ility Couraa 102
Region In ln a ta b lllty Couraa 101
Study 1
Study 2
Study 3
B Damping C oeffic ien t ( f t - lb - s e c )
Figure 3-14 Reaulta o f S e n s it iv ity A nalysis

CHAPTER IV
REAL TIME SIMULATION OF THE TRACKING SYSTEM
4 . 1 . I n t r o d u c t i o n
E a r l y i n t h e s t u d y , i t becam e n e c e s s a r y t o d e v e lo p a
r e a l t im e s i m u l a t i o n o f t h e t r a c k i n g e n c o u n t e r i n w h ic h
a c t u a l hum an o p e r a t o r s w e re p e r f o r m in g c o m p e n s a to ry t r a c k i n g .
D a ta t h u s g e n e r a t e d w as u s e d t o d e v e lo p t h e p a r a m e te r s a n d t o
v e r i f y t h e hum an o p e r a t o r m o d e l , w h ic h i s d e s c r i b e d i n
C h a p te r 5 . T h is c h a p t e r d o c u m e n ts t h e h y b r i d c o m p u te r p ro g ra m
t h a t w as u s e d i n o b t a i n i n g t h i s t r a c k i n g d a t a .
4 . 2 . T he H y b r id C o m p u te r
T he h y b r i d c o m p u te r a t L .S .U . c o n s i s t s o f a S c i e n t i f i c
D a ta S y s te m s S igm a 5 d i g i t a l c o m p u te r w i th an E l e c t r o n i c
A s s o c i a t e s I n c o r p o r a t e d (E A I) 680 a n a lo g c o m p u te r a n d an EAI
69 3 i n t e r f a c e . The S igm a 5 d i g i t a l c o m p u te r h a rd w a re c o n
s i s t s o f :
1 . A c e n t r a l p r o c e s s o r c o n t a i n i n g a r i t h m e t i c an d c o n t r o l
l o g i c h a rd w a re f o r a w id e r a n g e o f o p e r a t i o n s .
2 . M a g n e tic c o r e memory - 2 0 ,0 0 0 w o rd s o f h ig h s p e e d
(7 5 0 n a n o s e c o n d s ) c o r e m em ory. A w o rd c o n s i s t s o f
32 d a t a b i t s a n d o n e p a r i t y b i t .
52

53
3 . M u l t i - l e v e l i n t e r r u p t s t r u c t u r e — e x t e r n a l i n t e r r u p t
c o n t r o l (6 l e v e l s ) w i th m a s k in g f o r d y n am ic p r i o r i t y
a s s ig n m e n t .
4 . P e r i p h e r a l i n p u t / o u t p u t e q u ip m e n t
a . o n e d i s k ( 3 / 4 m i l l i o n b y t e s )
b . c a r d r e a d e r (4 0 0 c . p . m . )
c . l i n e p r i n t e r (800 l . p . m . )
d . p a p e r t a p e r e a d e r (5 0 0 c . p .m . ) an d p u n ch 500 c . p .m . )
e . o p e r a t o r ' s c o n s o le w i th r e g i s t e r d i s p l a y s a n d o n - l i n e t y p e w r i t e r
The a n a lo g h a rd w a re c o n s i s t s o f :
1 . An a n a lo g t o d i g i t a l c o n v e r t e r (ADCS) w i t h a 24
c h a n n e l m u l t i p l e x e r .
2 . T w elve m u l t i p l y i n g d i g i t a l t o a n a lo g c o n v e r t e r s
(MDACS)
3. E ig h t s e n s e l i n e s
4 . S i x t e e n c o n t r o l l i n e s
5 . T h i r t y l o g i c g a t e s
6 . T w en ty g e n e r a l p u rp o s e f l i p f l o p s
7 . P e r i p h e r a l i n p u t / o u t p u t e q u ip m e n t
a . Two x - y p l o t t e r s
b . One 8 c h a n n e l r e c o r d e r
c . Two 4 c h a n n e l o s c i l l o s c o p e s
A lth o u g h b o t h t h e a n a lo g a n d t h e d i g i t a l c o m p u te rs a r e e a s y
t o u s e , i t i s t h e h y b r i d l i b r a r y , a s e t o f F o r t r a n s u b r o u t i n e s ,
t h a t p e r m i t s e f f i c i e n t u t i l i z a t i o n o f t h e s y s te m .

54
4 . 3 . T he H y b r id P ro g ra m s
The r e a l t im e s i m u l a t i o n p ro g ra m o f t h e t r a c k i n g s y s te m
w i t h a n a c t u a l hum an o p e r a t o r i n t h e lo o p i s p i c t u r e d i n
F ig u r e 4 - 1 . D e t a i l e d d ia g ra m s o f t h e a n a lo g an d d i g i t a l p r o
g ram s a r e g iv e n i n F i g u r e s 4 -2 a n d 4 -3 r e s p e c t i v e l y .
F ig u r e 4 - 1 i n d i c a t e s t h e o v e r a l l p r o c e s s a s th e d i g i t a l
c o m p u te r s a m p le s , v i a t h e i n t e r f a c e , t h e gun p o s i t i o n ( a s
d e te r m in e d b y 9 g a n d ^ g ) a n d t im e . I t t h e n l o c a t e s t h e
t a r g e t p o s i t i o n c o r r e s p o n d in g t o t h e t im e i n s t a n t ( t h e f l i g h t
p a t h i s s t o r e d i n t h e d i g i t a l c o m p u te r ) a n d c a l c u l a t e s t h e
a n g le o f m is a l ig n m e n t i n a z im u th a n d e l e v a t i o n . The tw o
e r r o r s a r e f e d v i a t h e i n t e r f a c e b a c k t o t h e a n a lo g a n d d i s
p la y e d o n o s c i l l o s c o p e s . The tw o hum an o p e r a t o r s c o n t i n u o u s l y
m o n i to r t h e e r r o r a n d a p p ly c o r r e c t i v e t o r q u e i n p u t s v i a
h a n d s e t p o t s o n t h e a n a lo g . The to r q u e f o r e a c h c h a n n e l i s
i n p u t e d to a gun m o d e l , a s d e s c r i b e d i n t h e p r e v io u s c h a p t e r ,
p rog ram m ed o n t h e a n a lo g c o m p u te r . A s im p le d ia g ra m o f t h e
a n a lo g gun m o d e l i s show n in F ig u r e 4 - 4 , w h e re a s t h e s c a l e d
m o d el a n d t h e l o g i c c i r c u i t u s e d t o l i m i t t h e v e l o c i t y i n t e
g r a t o r a r e l o c a t e d i n A p p e n d ix D. The a n a lo g c o m p u te r
i n t e g r a t e s t h e s e e q u a t i o n s i n r e a l t im e to p r o d u c e an a n g u la r
gun p o s i t i o n , 9 g a n d ^ g . The l a t t e r i s sa m p le d b y t h e d i g i t a l
c o m p u te r , h e n c e t h e lo o p i s c l o s e d .
F ig u r e 4 -2 g i v e s d e t a i l s o f t h e a n a lo g c o m p u te r p a t c h i n g
d ia g ra m . A t t h e s t a r t o f e a c h r u n , t h e o p e r a t o r s m a n ip u la te
p o t s Q4 a n d Q7 t o d i r e c t t h e g u n s to w a rd t h e t a r g e t , t h u s
z e r o i n g t h e i n i t i a l e r r o r s . T h is i s n e c e s s a r y t o a v o id any

55
d
Tg(#|
Z * 5 2 r ~
| Elevation J
Human O perators
Scope.Oitplaye
Aeeel<‘irotionf
Angular Velocity (#>
1 'Angular
t<Position
— 1Rotation and
Angular Misalignment
Targe!Position
z r z — j
TimeGeneration
Tg(+)
i tAccelor
i totiont )
Angular Velocity 4
AngulorU
Position
| Azimuth |
FIGURE 4-1 HYBRID SIMULATION: OPERATOR IN LOOP

—Hal
I Humon | pijnoi Camputar{ Oparater t
Display I
Misalign -Scop*
I HumanI Oparatar
Hsf.-
L inaS10 M s a s /j^
Manastabla
FIGURE 4-2 HYBRID SIMULATION OF COMPENSATORY TRACKING

57
c S ta rt
Sat up ana
< 9 -Icolculota oim arrortl
Read ond write flight data
..... — J -| Define crossover time
Error> MoxlmuErorr« Maximum
ILoad error on scope]
Enter scale factor
1Coiculate field dimension
S to re
P 1 — — — 4S w itc h (l)*f> ( Store torque error angular accelerationPick flight cose
and disptament
Switch (4)* I
NoI Calculate sta rt time
IAnalog in 'lC‘ and 'NS'
Read analog : T 6 $ Torque
: iCalculate target position
Coll ro ta te (Target in gun coordinate )
I
Store >T Store
Yes | Rood NGO|
_________ 2.3f Write output matrix |
Switch (4 )- I
No
Punch tope . Torque e r to tf
NGO>2
FIGURE 4 -3 DIGITAL FLOW CHART ( Stop )

58
LfWIK1/J
I S L _ ^ T ) - J
B/J
Figure 4*4 Analog SInulacion of Gun
The Logic signal (LSW) l i a i t s ln tegra ta l #2 by opening Che e lectron ic swlCch when the outpuC reaches one o f i t s Lim its, The switchremains c losed u n t il the angular acceleration (?LIj|) change d irection thus moving sway froei I t s lim ited value. A Logic c ir c u it diagramfor sign a l LSW can be found in appendix D.

59
a c q u i s i t i o n p ro b le m s a t t h e s t a r t o f th e r u n . As t im e i s
g e n e r a t e d , t h e t a r g e t b e g in s t o move an d t h e t r a c k i n g e r r o r
i s d i s p l a y e d on t h e s c o p e . The o p e r a t o r s m a n ip u la te p o t s Q2
an d Q 9, f o r e l e v a t i o n a n d a z im u th r e s p e c t i v e l y , t o i n p u t
t o r q u e t o t h e gun m o d e l. T h is g e n e r a t e s a n a c c e l e r a t i o n o f
t h e gun w h ic h i s i n t e g r a t e d t o o b t a i n v e l o c i t y a n d p o s i t i o n .
Gun p o s i t i o n i s sa m p le d b y t h e d i g i t a l c o m p u te r a t t h e
r a t e o f 100 t i m e s / s e c v i a t h e i n t e r f a c e . I t a l s o sa m p le s
t im e an d c a l c u l a t e s t h e c o r r e s p o n d in g p o s i t i o n o f th e t a r g e t
a t t h a t i n s t a n t . F ig u r e U-3 g i v e s d e t a i l s o f t h e d i g i t a l
p ro g ra m . The a n a lo g i s s e t up fro m t h e d i g i t a l b y c a l l i n g a
nu m b er o f h y b r i d s u b r o u t i n e s . F l i g h t p a th s a r e r e a d i n t o t h e
d i g i t a l fro m c a r d s o r g e n e r a t e d i n t e r n a l l y .
When a c a s e i s t o b e r u n , t h e s t a r t i n g p o i n t o n th e
t im e a x i s i s c a l c u l a t e d fro m c r o s s o v e r a n d th e a n a lo g i s p u t
i n t o t h e i n i t i a l c o n d i t i o n m ode, The d i g i t a l c o m p u te r th e n
s a m p le s t im e an d t h e i n i t i a l gun a n g le s ( a n d ^ j ) . T a r g e t
p o s i t i o n s , c o r r e s p o n d in g t o t h e t im e i n s t a n t , a r e c a l c u l a t e d
o r i n t e r p o l a t e d fro m s t o r e d a r r a y s . A s u b r o u t i n e ( R o t a t e ) i s
c a l l e d t o t r a n s f o r m t h e t a r g e t p o s i t i o n t o t h e gun c o o r d i n a t e
s y s te m . Upon r e t u r n fro m t h i s s u b r o u t i n e , t h e i n i t i a l a im in g
e r r o r s a r e c a l c u l a t e d a n d s u p p l i e d t o t h e a n a lo g f o r d i s p l a y .
E ac h o p e r a t o r t h e n z e r o s h i s e r r o r b y a d j u s t i n g th e c o r r e s
p o n d in g h a n d s e t p o t . The d i g i t a l c y c l e s a lo o p a w a i t in g t h e
a n a lo g t o o p e r a t e . T h is i s a c h ie v e d b y c o n t i n u a l l y c o m p a r in g
t h e v a lu e o f t im e on t h e a n a lo g w i th t h e t im e f o r t h e n e x t

60
s t o r a g e p o i n t . I n t e r v a l s f o r s t o r a g e o f d a t a a r e s e t a t 0 .2
s e c . As lo n g a s t h e s a m p le d t im e i s l e s s t h a n th e n e x t
s t o r a g e t im e , t h e lo o p i n d i c a t e d o n F ig u r e 4 -3 by e n t r y p o i n t
11 w i l l b e e x e c u te d c o n t i n u o u s l y .
When a l l i s r e a d y , an o p e r a t o r p u t s t h e a n a lo g in th e
o p e r a t e m o d e , t h u s g e n e r a t i n g t im e an d m ov ing t h e t a r g e t a c r o s s
t h e s c r e e n . A t c r o s s o v e r , i t w i l l a lw a y s b e c r o s s i n g th e
c e n t e r l i n e o f t h e s c o p e . A t t h e s p e c i f i e d i n t e r v a l s th e
d i g i t a l s t o r e s t im e an d t h e c o r r e s p o n d in g t r a c k i n g d a t a
( t o r q u e , a n g u l a r a c c e l e r a t i o n , gun p o s i t i o n an d e r r o r i n b o th
a x i s ) .
A r u n i s t e r m i n a t e d w hen t im e e x c e e d s TSTOP, t y p i c a l l y
40 s e c o n d s . A t t h e e n d o f a r u n , an i n t e g e r v a r i a b l e "NGO"
i s e n t e r e d v i a t h e t e l e t y p e , o f f e r i n g a d d e d f l e x i b i l i t y i n
t h e fo rm o f s e v e r a l o p t i o n s . "NGO" may b e 1 , 2 , 3 , o r 4
a c c o r d i n g t o w h e th e r t h e p ro g ra m i s t o b e t e r m i n a t e d w i th o r
w i t h o u t t h e o u t p u t f ro m t h e l a s t r u n , o r t o b e c o n t in u e d w i th
o r w i t h o u t t h e o u t p u t . I f a n o u t p u t i s d e s i r e d , a s w i tc h i s
u s e d t o d e c id e i t s fo rm , w h ic h c a n be a p r i n t o u t o n ly on th e
l i n e p r i n t e r , o r p r i n t o u t a n d a p u n c h e d t a p e f o r f u r t h e r
p r o c e s s i n g i n t o c a r d s .
As m e n t io n e d a b o v e , t h e p ro g ra m o p e r a t e s i n r e a l t im e ,
a t y p i c a l ru n t a k i n g a b o u t o n e m in u te ( s e t t i n g up t im e + 40
s e c . o f o p e r a t i o n ) . To o u t p u t t h e d a t a on p a p e r t a p e i s ,
h o w e v e r , t h e b o t t l e n e c k , a s i t t a k e s a b o u t 15 m in u te s p e r r u n .
D e t a i l s o f th e o u t p u t r o u t i n e a r e g iv e n i n A p p e n d ix E .

P r e l i m i n a r y r e s u l t s w i t h t h i s r e a l t im e t r a c k i n g s y s te m
w i th a c t u a l o p e r a t o r s d o in g th e t r a c k i n g a r e show n i n
F ig u r e 4 - 5 . I n t h i s f i g u r e we s e e how t h e p e r fo rm a n c e o f an
o p e r a t o r im p ro v e s a s h i s e x p e r i e n c e i n c r e a s e s . I n t h i s s e r i e s
o f r u n s , t h e o p e r a t o r im p ro v e d h i s p e r fo r m a n c e fro m a maximum
t r a c k i n g e r r o r o f a p p r o x im a te ly 1 0 ° (1 7 7 m i l e s ) t o l e s s th a n
3 .5 ° (62 m i l e s ) a f t e r 27 r u n s . The m ean t r a c k i n g e r r o r i s
c o n s i d e r a b l y l e s s . T h ese r e s u l t s w e re o b t a i n e d w i th a s e t o f
gun p a r a m e te r s c o r r e s p o n d i n g t o t h o s e d e te r m in e d f o r S tu d y 1 .
F ig u r e s 4 -6 th r o u g h 4 -8 i l l u s t r a t e t r a c k i n g p e r fo rm a n c e
o f t h e sam e o p e r a t o r f o r s e v e r a l f l y - b y c o u r s e s . N o te p a r
t i c u l a r l y t h e d i f f i c u l t y e n c o u n te r e d b y t h e r e a l o p e r a t o r
t r a c k i n g an a i r c r a f t a t 900 f e e t ( t h e minimum d i s t a n c e a s
show n i n F ig u r e 4 t .6 ) . I t s h o u ld b e n o t e d t h a t t h e S tu d y 1
gun m o d e l w as u s e d i n e a c h o f t h e s e c a s e s .
D a ta o b t a i n e d f ro m r e a l t im e t r a c k i n g e n c o u n t e r s , w i th
hum an o p e r a t o r s i n t h e l o o p , w e re u s e d t o d e v e lo p th e p a r a
m e te r s a n d t o v a l i d a t e t h e hum an o p e r a t o r m o d e l. T h is w ork i s
d e s c r i b e d i n C h a p te r 5 .

(MM
toQ)
HOMO
HlfW
NZ
V
0 0 0 feet minimum distance390 knots375 foot attitude
Run number from start:
27
20 24 4 0TIME (Seconds)
FIGURE «-5 PERFORMANCE VERSUS EXPERIENCE

\
360
320
280
COURSE I (SoM U m ): 450 Knott/Hour 3751800 Fool Distoneo
COURSE 2 (D oM U nat: 450 Knote/Hoor 37S Fiat OwwHow 900 Foot Oirtooco
240
200
160
120
80
40
-40
-80, 20TME (Stconds)
24 4036
FIGURE 4-6 TRACKING PERFORMANCE O F ACTUAL OPERATOR Io*U1

AZIM
UTH
ERRO
R (M
ila)
160
120COURSE 3 (Solid Lina):
450 Knott/Hour 300 Ftat Bavotion 2700 foot Diatonea
COURSE 4 (Oothad Lint): 450 Knots/Hour 375 Faat Elavotion 2700 foot Dtetanca
80
40
-8024 40
TIME (Saconds)
FIGURE 4-7 TRACKING PERFORMANCE O F ACTUAL OPERATOR II
CTl

AZIM
UTH
ERRO
R (M
ils)
120 COURSE 5 (Solid Line): 550 Knots/Hour 375 Feet Elevation 1800 Foot Distance
COURSE 6 (Dashed Line): 350 Knots/Hour 375 Feet Elevation 900 Foot Distance
80
4 0 -
N _ /
-40
-80 ; 20 TIME (Seconds)
24 40
FIGURE 4-8 TRACKING PERFORMANCE O F ACTUAL OPERATOR m
a ttn

CHAPTER V
THE HUMAN OPERATOR MODEL
5 . 1 . I n t r o d u c t i o n
The m odel o f t h e hum an o p e r a t o r t h a t w as f i n a l l y i n c o r
p o r a t e d i n t h i s s t u d y w as s t r o n g l y i n f l u e n o e d b y t h e w ork o f
C o s t e l l o 3* who h a d a m e a s u re o f s u c c e s s s i m u l a t i n g o b s e r v e d
o p e r a t o r p e r fo r m a n c e w i t h a tw o-m ode m o d e l. A m u lt i -m o d e m o d e l
was a l s o a d a p te d f o r t h i s s t u d y c o n s i s t i n g o f a t r a c k i n g
mode a n d tw o a c q u i s i t i o n m o d es . The p a r t i c u l a r mode w h ic h i s
a c t i v e d e p e n d s u p o n t h e o b s e r v e d e r r o r a n d i t s d e r i v a t i v e ,
a s show n i n t h e p h a s e p l a n t p l o t , F ig u r e 5 - 1 . When t h e e r r o r
a n d i t s d e r i v a t i v e a r e w i t h i n t h e e n c l o s e d a r e a , t h e t r a c k i n g
m ode o f t h e o p e r a t o r i s a c t i v e , o t h e r w i s e o n e o f t h e a c q u i r e
m odes i s a c t i v e u n t i l t h e e r r o r a n d i t s d e r i v a t i v e a r e b r o u g h t
w i t h i n t h e e n c l o s e d r e g i o n . I n a d d i t i o n t o d e v e lo p in g t h e
hum an o p e r a t o r m o d e l , t h e d i g i t a l s i m u l a t i o n s o f t h e t r a c k i n g
s y s te m i s d i s c u s s e d i n t h i s c h a p t e r .
5 . 2 . T he T r a c k in g Mode
As p o i n t e d o u t i n t h e i n t r o d u c t i o n , t h e human o p e r a t o r
h a s b e e n r e p r e s e n t e d b y a m u lt i -m o d e m o d e l . T h is s e c t i o n
d e a l s w i t h t h e e v o l u t i o n o f t h e m o d e l 's t r a c k i n g m ode, fro m
i t s b e g in n i n g a s a l i n e a r m o d e l ( E q u a t io n 2 .4 - 3 ) t o i t s f i n a l
f o r m u l a t i o n a s a n o n l i n e a r a d a p t i v e m o d e l .
66

t
100 M H # /^
Traoking /Domain—
- 5 0 Mil# // 5 0 Milt
io o m iiv 8 , #
■Pho»# - Plan#
FIGURE H ERROR VERSUS ERROR RATE

68
5 .2 1 . The L i n e a r Human O p e r a t o r . W ith t h e s e l e c t i o n ,
show n i n S e c t i o n 3 .> t, o f t h e m om ent o f i n e r t i a , J , t h e d r a g
o o e f f i o i e n t , B , a n d t h e hum an o p e r a t o r t im e c o n s t a n t s , t h e
t o t a l s y s te m i s r e a d y t o b e e v a l u a t e d f o r t r a c k i n g c a p a b i l i t y
o n c e t h e s e l e c t i o n o f t h e hum an o p e r a t o r g a in c o n s t a n t . K,
i s m ade. S in c e t h e s y s te m now c o n s i s t s e s s e n t i a l l y o f a
f e e d b a c k c o n t r o l l o o p , i t w as d e c id e d t o s e l e c t K b a s e d upon
a common c o n t r o l lo o p t u n i n g c r i t e r i o n , t h e d e c a y r a t i o c r i
t e r i o n .
S e l e c t i o n o f a p a r a m e te r u s i n g a d e c a y r a t i o c r i t e r i o n
r e q u i r e s t h a t t h e p a r a m e te r s i n q u e s t i o n be s e t s u c h t h a t
e a c h s u c c e s s i v e p e a k o f t h e r e s p o n s e o f t h e s y s te m i s a c e r t a i n
f r a c t i o n o f t h e p r e v i o u s p e a k w hen t h e s e t p o i n t o f t h e s y s te m
h a s a s t e p i n p u t c h a n g e . T h is w as a c c o m p l is h e d by f i x i n g th e
t a r g e t i n a s t a t i o n a r y p o s i t i o n . T y p ic a l r e s u l t s a r e show n
i n F i g u r e s 5 -2 an d 5 -3 f o r v a l u e s o f K o f 5 a n d 20 f t - l b / m i l ,
r e s p e c t i v e l y . N o te t h a t w i th a v a lu e o f 5 , a r e l a t i v e l y u n d e r -
dam ped r e s p o n s e w as o b t a i n e d , w h i l e w i th t h e h i g h e r g a in t h e
r e s p o n s e w as much f a s t e r a n d t h e r e f o r e m ore o s c i l a t o r y . W ith
t h e l a t t e r r e s p o n s e , a d e c a y r a t i o o f a p p r o x im a te ly 1 /1 0 w as
o b s e r v e d . The r e s p o n s e t im e o f t h e s y s te m may b e f u r t h e r
i n c r e a s e d b y f u r t h e r i n c r e a s i n g t h e g a in r a t i o ; h o w e v e r , t h i s
w i l l c a u s e t h e s y s te m t o becom e e v e n m ore o s c i l l a t o r y an d
e v e n t u a l l y u n s t a b l e .
T h ese r e s u l t s a l s o i n d i c a t e t h e in a d e q u a c y o f t h e l i n e a r
hum an o p e r a t o r m odel i n t h e a c q u i s i t i o n o f a t a r g e t . T h is h a d

Trac
kmt;
erro
r (r
ill)
69
sec •
see •
sec -sec
IOC ■IOC ■
M l •
TIM ( i m r i i )
f l p n f t I i h U i i o f ScatCanary T u to r ■a • s
TP
l« -»«S0( W
to %
I O C .
Idt ■
MC ■
f l a m f a Tracking o( Ica ilaarry Tartar » • M

70
b e e n p o i n t e d o u t b y s e v e r a l a u t h o r s , a s m e n tio n e d i n C h a p te r
2 .
B a se d upon t h e a b o v e r e s u l t s , t r a c k i n g r u n s w e re made
w i th t h e hum an o p e r a t o r g a in c o n s t a n t o f b e tw e e n 10 a n d 30 f t -
l b / m i l . I n o r d e r t o e v a l u a t e t h e p e r f o rm a n c e o f t h i s p a r t i
c u l a r hum an o p e r a t o r , a l e f t t o r i g h t l e v e l f l i g h t p a th w as
c h o se n w i th a n a i r c r a f t v e l o c i t y o f 450 k n o t s . The a l t i t u d e
w as 375 f e e t an d t h e f l i g h t p a th w as c h o s e n to c o r r e s p o n d to
c o u r s e 1 0 2 , show n i n F ig u r e B - 2 . The i n i t i a l p o s i t i o n o f t h e
a i r c r a f t waB s e l e c t e d t o g iv e 20 s e c o n d s t o c r o s s o v e r . I n
a d d i t i o n , s i n c e c o n c e rn w as e x p r e s s e d w i t h t h e t r a c k i n g
c a p a b i l i t y o f t h e hum an m o d e l, t h e gun w as i n i t i a l l y p o i n t e d
a t t h e a i r c r a f t . T h a t i s , i t w as a ssu m e d t h a t th e gun o p e r a t o r
h a d a c q u i r e d t h e t a r g e t . M ost o f t h e t r a c k i n g s t u d i e s r e p o r t e d
h e r e w e re e v a l u a t e d w i t h t h i s p a r t i c u l a r f l y - b y .
I t s h o u ld b e e m p h a s iz e d t h a t i n t h e s e r u n s an a t t e m p t
w as b e in g m ade t o f i n d a m o d el t h a t w o u ld p e r fo rm i n a much
s u p e r i o r m an n e r t o o b s e r v e d t r a c k i n g b y a t r a i n e d o p e r a t o r ,
a s o b t a i n e d fro m t h e h y b r i d s t u d y . I n t h i s w ay , t h e p a r a m e te r s
o f t h e m odel t o f i t t h e o b s e r v e d d a t a c o u ld b e r e g r e s s e d .
T h e r e f o r e , t h e c r i t e r i o n u s e d t o e v a l u a t e t h e p e r fo rm a n c e o f
t h e v a r i o u s m o d e ls t e s t e d w as t h e m in im iz a t io n o f t h e i n t e g r a l
o f th e s q u a r e o f t h e a z im u th e r r o r :
20ISE = / ( e # ) 2 d t ( 5 . 2 - 1 )
- 2 0
t

71
R e s u l t s w i th t h e l i n e a r o p e r a t i o n a r e shown i n F ig u r e s
5 - 4 , 5 - 5 , an d 5 -6 f o r a g a in c o n s t a n t , K, o f 1 0 , 3 0 , a n d MO,
r e s p e c t i v e l y . I n e a c h c a s e , t h e a z im u th t r a c k i n g e r r o r i s
p l o t t e d a g a i n s t t im e t o c r o s s o v e r . E l e v a t i o n e r r o r was
g e n e r a l l y o b s e r v e d t o be a s m a l l e r e r r o r t h a n a z im u th s i n c e
f o r t h e s e f l y - b y ' s e l e v a t i o n t r a c k i n g i s a much s i m p le r t a s k .
T h e r e f o r e , f o r s i m p l i c i t y , o n ly a z im u th e r r o r i s r e p o r t e d .
T h ese r e s u l t s , when co m p ared t o th o s e o f t h e a c t u a l
hum an o p e r a t o r a s show n i n F ig u r e 4 - 6 , i n d i c a t e t h a t t r a c k i n g
w i th t h e l i n e a r human o p e r a t o r m o d el was v e r y p o o r , w i th
maximum e r r o r s n e a r c r o s s o v e r r a n g in g fro m 750 m i l s (K = 10)
t o 200 m i l s (K = 4 0 ) . (H e re a p o s i t i v e e r r o r i n d i c a t e s t h e
gun l a g g in g th e t a r g e t . ) Any a t t e m p t t o s i g n i f i c a n t l y r e d u c e
t h i s p e a k e r r o r by f u r t h e r i n c r e a s i n g t h e g a in c o n s t a n t
r e s u l t e d i n i n s t a b i l i t y a f t e r c r o s s o v e r w hen t h e a i r c r a f t i s
d e c e l e r a t i n g p a s t t h e gun s i g h t .
When o n e c o n s i d e r s t h a t t h e s e r e s u l t s w e re o b t a i n e d
a f t e r c o n s i d e r a b l e a d ju s tm e n t i n a n o t h e r p a r a m e te r o f th e
gun s y s te m ( s e e S e c t i o n 3 . 4 ) i n o r d e r t o im p ro v e t h e o v e r a l l
s y s te m s t a b i l i t y , i t w as o b v io u s t h a t c o n s i d e r a b l e m o d i f i c a
t i o n w o u ld h a v e t o b e made t o t h e hum an o p e r a t o r m odel i n
o r d e r t o o b t a i n r e a s o n a b l e r e s u l t s .
A n a ly s i s o f t h e p e r fo rm a n c e , i n d i c a t e d t h a t t h e o p e r a t o r
was n o t s u f f i c i e n t l y e x c i t e d d u r in g t h e f l y - b y . T h a t i s , a s
t h e a i r c r a f t a c c e l e r a t e d p a s t t h e g u n s i g h t , t h e i n c r e a s i n g

BO. 0
0
O S
d i
THKK1N6 OP MRCMFT ON CCNTIML COUrOC
Kf*10.V M B L TTPt OF CONOR
a . . . NZJIWTH
‘-20 .00 4 s. 00 >10.00 -k.o0 o’. 00 s'. 00 10.00 1S.OO 20.TIHE TO CROSSOVER (3EC0N0S)
Figure 5 -4 Tracking with Linear Operator - I

DO'DC
THRCXIMG o r m n ^ M T T - ON CCKTIWL COURSE
s i S J L I NOW HUMAN hoocl•CP-30.
ir<=»M *<E i
s n w L T i r e o r c r m r
. B • • * "UMHH
- 2 0 .0 0 - 1 5 .0 0 - 1 0 .0 0 - 5 . 0 0 5ToO ? 0 0 1 0 . TO 1 5 .0 0 j i .TIHE TO CROSSOVER (SECONDS}
Figure 5-5 Tricking v lth Linear Operator - I I

n
X
Z't i iXZ pUOs .S i
TfMCKINO or RlflCMFT ON CENTRAL COURSE LINEAR HUWW HOOEL
KT-%0.
o10.00 -fc.oo o', no c'.ooTIME TO CROSSOVER (3EC0N0S1
-20.00 is.no 20.00
Figure 5-6 Tracking with Linear Operator - III

75
l a g o f t h e gun w as c a u s e d b y i n s u f f i c i e n t to r q u e o u t p u t o f
t h e o p e r a t o r , n o t by th e a c c e l e r a t i o n o f th e a i r c r a f t e x c e e d in g
t h e maximum s le w r a t e o f t h e g u n .
S in c e t h e d e la y t im e and t im e c o n s t a n t s o f t h e human
o p e r a t o r m odel h a v e b e e n s u b s t a n t i a t e d by c o n s i d e r a b l e d a t a ,
i t w as d e c id e d t o a l t e r t h e s e o n ly a s a l a s t r e s o r t . T h e r e
f o r e , i t becam e a p p a r e n t t h a t t h e human o p e r a t o r g a in c o n s t a n t
m u s t b e made a f u n c t i o n o f t h e o b s e r v e d e r r o r . T h is l e d t o
t h e u s e o f t h e n o n l i n e a r human o p e r a t o r m o d e l.
5 . 2 2 . The N o n l in e a r O p e r a t o r . The i n c o r p o r a t i o n o f
th e g a in c o n s t a n t o f t h e hum an o p e r a t o r a s a f u n c t i o n o f
e r r o r r e s u l t s i n t h e human o p e r a t o r m o d el b eco m in g n o n l i n e a r .
The r e s u l t i n g e x p r e s s i o n w as o f t h e fo rm :
Gp(S) = (20 + |e #| p ) - ( T LS + 1 ) e~TS ( 5 . 2 - 2 )
(Tn S + I H T j S + 1)
w h e re t h e t e r m i n b r a c k e t s r e p r e s e n t s t h e v a r i a b l e g a i n ; e
i s t h e o b s e r v e d a z im u th e r r o r i n m i l s ; an d p i s a c o n s t a n t
t o be s e l e c t e d . The o t h e r c o n s t a n t s a r e a s p r e v i o u s l y
d e f i n e d . I n a d d i t i o n , i t w as fo u n d n e c e s s a r y t o l i m i t t h e
v a r i a b l e K t o a maximum o f 100 f t - l b / r a d i a n i n o r d e r to
im p ro v e p e r f o r m a n c e .
R e s u l t s o b s e r v e d w i t h t h i s m o d e l , f o r t h e sam e f l i g h t
p a t h , a r e show n i n F ig u r e s 5 - 7 , 5 - 8 , an d 5 -9 f o r v a r y in g
v a l u e s o f t h e p a r a m e te r s p . I t i s o b s e r v e d t h a t t h e s y s te m

t m c k j n g or mncmFYH1TM MN-UNGRN MM W WOCL r-i.o
RLTiM * 0 .0stpobl T T ft of crnon
q . . . OltNUTH
' - 2 0 .0 0 -L B . 0 0 - 10.00 - t . 0 0 o'.OQ f ’.OO 1 0 .0 0 lf c .0 0 2 0 .11 he: to crossover . tseconosj
Figure 5-7 Tracking with Non-Linear Operator - I

»
o
TfM CK iic o r t u n c m n KITH HUM
P-J.5 HLfHH *0.0
I S . 0 0 - I D . 0 0 - k . o o l i .C O20.00 0.00 S . 0011 HE TO CROSSOVER C5EC0N05J «*»•vj
Figure 5-8 Trucking with Non-Linear Operator - I I

S j y / X ^ X
Z.Sat •Z ? o- Ja g n M c x iN c v M ' t a n r r
WITH MOM-LINEM HUM P-*.0 NLPM «0.Q
10.00 - k . e o O'. 00TIRE TO CROSSOVER
i b . o o co .IS .0 0 S . 0 0(SECONDS!
10.00 00
00Figure 5*0 Tracking with Non-Linear Operator - I I I

79
q u i c k l y w e n t u n s t a b l e w i th v a lu e s o f p o f 2 .0 a n d 1 .5 w h ile
m a rk e d ly im p ro v e d t r a c k i n g w as o b t a i n e d w i th a p o f 1 , 0 . In
t h e l a t t e r c a s e , w h i le t h e gun s t i l l l a g s t h e t a r g e t , t h e
maximum l a g n e a r c r o s s o v e r i s l e s s t h a n 80 m i l s . N o te th e
o s c i l l a t i o n s i n t h e t r a c k i n g a f t e r c r o s s o v e r . T h is i n d i c a t e d
t h e u n s t a b l e n a t u r e o f t h e t r a c k i n g a f t e r c r o s s o v e r and
s u g g e s t e d a d i f f e r e n t v a lu e o f p t o be u s e d b e f o r e c r o s s o v e r
a n d a f t e r c r o s s o v e r .
T h ese r e s u l t s i n d i c a t e d t h a t t h e hum an o p e r a t o r m o d e l,
a s s u g g e s t e d i n t h e l i t e r a t u r e , c o u ld n o t p e r f o r m a d e q u a te ly
b a s e d upon t r a c k i n g e r r o r f e e d b a c k . E i t h e r t h e p a r a m e te r s
o f t h e e x i s t i n g m o d el o r t h e b a s i c n a t u r e o f t h e o p e r a t o r
m o d el s h o u ld b e a l t e r e d .
I t seem ed l i k e l y t h a t an o p e r a t o r t r a c k i n g a t a r g e t
w o u ld be a w a re o f t h e a n g u l a r v e l o c i t y o f t h e a i r c r a f t r e l a
t i v e t o h i s p o s i t i o n a n d t h e r e f o r e w o u ld b a s e som e o f h i s
o u t p u t on t h i s k n o w le d g e . C o n s e q u e n t ly , t h e m odel w as a l t e r e d ,
a s show n i n F ig u r e 5 - 1 0 .
As show n i n F ig u r e 5 - 1 0 , t h e hum an o p e r a t o r s e n s e s th e
a n g u l a r a c c e l e r a t i o n o f t h e a i r c r a f t p a s t h i s p o s i t i o n . T h is
v e l o c i t y i s t h e n m u l t i p l i e d by a c o n s t a n t , a , ( t o b e
d e te r m in e d ) an d a d d e d t o t h e o u t p u t t o r q u e o f t h e human o p e r a
t o r m odel ( t h e n o n l i n e a r o n e w as r e t a i n e d ) . The human o p e r a t o r
m o d e l th u s a c t s a s a t r i m t o z e r o t h e o b s e r v e d e r r o r . A lso
n o t e t h a t th e t o t a l t o r q u e i s s t i l l d e la y e d b y 0 .1 5 s e c o n d .
R e s u l t s f o r v a lu e s o f a o f 10 a n d 20 f t - l b - s e c / r a d i a n a n d f o r

(Torque) 0
(«>,
(E levation)
A ircraft P osition & VelocityTarget A ircraft
V elocity
GOTMODEL
DELAY
DELAY
GOTMODEL
HUMAN
OPERATOR
<: o
o »i
Figure 5*10 Control System with Huasn Operator Sensing A ircraft Velocity

81
v a r io u 6 v a lu e s o f t h e p p a r a m e te r a r e shown i n F ig u r e s 5 -1 1
th r o u g h 5 - 1 5 ,
R e a s o n a b ly good t r a c k i n g w as o b t a i n e d w i th a e q u a l t o
10 a n d p e q u a l t o 1 . 2 , a s show n i n F ig u r e 5 -1 1 . F u r t h e r
i n c r e a s e s i n t h e v a lu e o f p w i th t h i s sam e a l e d t o i n s t a
b i l i t y p a s t c r o s s o v e r , a s show n in F ig u r e s 5 -1 2 an d 5 -1 3 .
W ith a v a lu e o f a e q u a l t o 2 0 , t h e gun l e d t h e t a r g e t
t h r o u g h o u t m o st o f t h e e n c o u n t e r , a s show n i n F ig u r e 5 -1 4 .
Once a g a i n , i n c r e a i s in g t h e v a lu e o f p w i t h t h e sam e v a lu e o f
a l e d t o i n s t a b i l i t y a f t e r c r o s s o v e r ; h o w e v e r , t h e maximum
e r r o r a t c r o s s o v e r w as c o n s i d e r a b l y r e d u c e d . T h is i s show n
i n F ig u r e 5 -1 5 .
T h e se r e s u l t s s u g g e s t e d t h a t a d i f f e r e n t v a lu e o f p
b e f o r e a n d a f t e r c r o s s o v e r , w i th t h e v a lu e a f t e r c r o s s o v e r
b e in g c o n s i d e r a b l y s m a l l e r t h a n b e f o r e c r o s s o v e r , w o u ld c o n
s i d e r a b l y r e d u c e t h e t r a c k i n g e r r o r . Such w as t h e c a s e , a s
show n i n F ig u r e 5 - 1 6 . B e fo re c r o s s o v e r th e r e s u l t s a r e
i d e n t i c a l t o t h o s e o f F ig u r e 5 - 1 2 . H o w ev er, a f t e r c r o s s o v e r
t h e p p a r a m e t e r w as c h a n g e d 1 / 1 .5 o r 2 / 3 , r e s u l t i n g i n
s t a b i l i t y th r o u g h t h e e n t i r e t r a c k i n g s e q u e n c e .
One o f t h e p o s s i b l e d ra w b a c k s t h a t was f o r e s e e n in
u s i n g a p a r a m e te r s u c h a s p w as t h a t an op tim um v a lu e f o r i t
w o u ld p r o b a b ly b e h i g h l y d e p e n d e n t upon t h e p a r t i c u l a r c o u r s e
t h e a i r c r a f t was f l y i n g p a s t t h e gun p o s i t i o n . S e v e r a l w ays
w e re i n v e s t i g a t e d f o r a l t e r i n g t h e g a in e x p r e s s i o n o f t h e
hum an o p e r a t o r m odel o f E q u a t io n ( S . 2 - 2 ) . The m o s t s u c c e s s
f u l w as :

fi
ii
WW
.
IHft
»I
timouni w mmvrrHITH WS-UWW1 NUMW MOO.
f*l.«
stool TTft or m ang . . . nZIfUTN
"-io.oo - I S . DO - 1 0 .0 0 -fc.O O o'. 0 0 s'.0 0 1 0 .0 0 11.00 zb.ooTIHE TO CROSSOVER (SECONOS)
Figure 5-11 Trucking with Nan-Linear Plus Feed Forwerd Operator

TJMEXJNB dr MKMrr mm MBN-UNBMI MUMfW
r - i .snurm-io.
5THOOL TTfC d r CRRdO a . . . R1MUTH
'- 1 0 .0 0 - I S . 0 0 - 1 0 .0 0 - S . f - ----- ------ 757•to. 00 -d .O O 0.00 S.00 10.00TIME TO CROSSOVER (SECONDS)
oo co.oo
Figure 5*12 Tracking with Non-Linear Plus Feed Forward Operator - I I

-«.(
8l
ig-m
FiJot
W (h
M ..
...
timcxiw or RinaMrrWITH NBM.INCMI HUM
P*C.O HLfHA-10.
T t or D HtlfVTH
e
10.00 4.00 __ __TINE TO CROSSOVER (SECQNOS)
11.00 s. oe *o
Figure 5-13 Tracking with Non-Linear Pin# Feed Forward Operator - II I

O 1
o
TfMotiMc or mnawrr KITH MON-UMCMI HUMM
P-1.29THB0L TTPC V (I
B . . . ttlM IT H
fc.oo oTbo iTooTIME TO CROSSOVEB (SECONDS)
1 3 .0 0- 20.00 1 5 .0 0 10.00 10.00 20.00
Figure 5-14 Tracking with Mon-Linear Plue Feed Forward Operator - IV

e
timckinb or mncrnrT w:h mm-unom mmw
r-c.sRLPm-CO. '
X
AC
MOL TTPt O r Ob . . . m nm
■ is. o o - i o . o o - k . o o ik.ooTIME TO CROSSOVER (SECONOS)
10.00
Figure 5-15 Tracking with Non-Linear Plus Feed Forward Operator - V

cc
TIMOtlMO BP BIROMPT N1TH NON-UNCim MUWM MOO.
P - I .S . 1 /1 .5 SLfHB-lO.
« 8*u
STNBBL TTPt o r CWWI a . . • BZIWTN
-k.oo o'.oo s', oo ib.oo 15.00TIHE TO CROSSOVER (SECONOS)
£ 0 .0 0 - 1 5 .0 0 10.00
X
Figure 5-10 Tracking with Non-Linear Plus Feed Forward Operator •

88
GpCS) = (20 ♦ ! « . • W# /B > |).< T 1.S + l ) e - T S ( 5 . 2 - 3 )
<TnS + l > * ( T i s + l )
H e re t h e g a in c o n s t a n t , t h e e x p r e s s i o n i n b r a c k e t s o f
E q u a t io n ( 5 . 2 - 3 ) , w as o n c e a g a i n m ade a f u n c t i o n o f t h e e r r o r ,
b u t , i n a d d i t i o n , w as i n c r e a s e d i n p r o p o r t i o n t o t h e a n g u la r
v e l o c i t y o f t h e a i r c r a f t p a s t t h e g u n . A g a in , t h e maximum
v a lu e o f K w as l i m i t e d t o ± 100 f t - l b / r a d i a n . O f c o u r s e , t h e
o p tim u m p r o p o r t i o n a l i t y f a c t o r B w i l l a l s o be d e p e n d e n t upon
t h e c o u r s e . H o w ev er, i t w o u ld seem to b e l e s s s e n s i t i v e t h a n
a p a r a m e t e r s u c h a s p . The r e s u l t s w i t h t h i s m o d el a r e show n
i n F ig u r e 5 -1 7 f o r a v a lu e B o f 0 .1 f t - l b - s e e / r a d i a n 3 .
As s t a t e d e a r l i e r , t h i s p r e l i m i n a r y w ork w i th th e human
o p e r a t o r f u n c t i o n h a d b e e n d i r e c t e d to w a rd o b t a i n i n g a m odel
t h a t w o u ld t r a c k b e t t e r th a n o b s e r v e d d a t a s o t h a t t h e p a r a
m e te r s o f t h e hum an o p e r a t o r m odel w e re s u b j e c t e d t o a s i x -35p a r a m e te r o p t i m i z a t i o n u s i n g P o w e l l 's n o n d e r i v a t i v e m e th o d .
The hum an o p e r a t o r m odel c h o s e n f o r o p t i m i z a t i o n i s g iv e n b y
E q u a t io n ( 5 . 2 - 2 ) . The p a r a m e te r s o p t im iz e d w e re t h e t im e
c o n s t a n t s T j , T ^ , a n d Tn , an d t h e p a r a m e te r s p ( b e f o r e c r o s s o v e r ) ,
p ( a f t e r c r o s s o v e r ) , a n d a . T he o b j e c t i v e f u n c t i o n m in im iz e d
was IS E , a s g iv e n by E q u a t io n ( 5 . 2 - 1 ) . The op tim um p a r a m e te r s
w ere fo u n d t o b e :
Tn = 0 .1 9 1 1 s e c
Tl = 0 . 7 2 2 s e c

t
cc
TiwcxjNB or m ncm nWITH NM-UNCMI MUM
KT-21 * IEmN/BI 0*3.1
CO.
'* . 0 0 4 . 0 0 ffw * j» TIHE TO CIWSSCVEH (SECONOS)
i k . o o t b . o o10.00«o
Figure 5*17 Tracking with Non-Unear Plua Feed Forward Operator - VII

90
T i a 0 .5 6 8 s e c
« = 1 4 .5 4 1 1 s e c
p ( b e f o r e c r o s s o v e r ) = 2 .2 5 0 3
p ( a f t e r c r o s s o v e r ) » 1 .9 1 8 1
R e s u l t s w i th t h e s e p a r a m e te r s may be s e e n i n F ig u r e
5 - 1 8 . E x c e l l e n t t r a c k i n g r e s u l t e d b o th b e f o r e an d a f t e r c r o s s
o v e r w i th a maximum a z im u th e r r o r o f a b o u t 15 m i l s j u s t p r i o r
t o c r o s s o v e r .
H o w ev e r, when t r a c k i n g w as a t t e m p te d w i th a d i f f e r e n t
c o u r s e , s u c h a s o n e c o r r e s p o n d in g t o t h e c o u r s e 1 0 1 , v e ry p o o r
t r a c k i n g r e s u l t e d . T h is i s a d i r e c t r e s u l t o f o v e r t u n i n g th e
s y s te m f o r o n e p a r t i c u l a r c o u r s e . A new m odel h a d t o be
d e v e lo p e d w h ic h w o u ld g iv e s a t i s f a c t o r y t r a c k i n g p e r fo rm a n c e
w h i l e u s i n g o n ly o n e s e t o f p a r a m e te r s f o r v a r i o u s f l i g h t
p a t h s . The m o d e l may b e r e p r e s e n t e d b y t h e b lo c k d ia g ra m o f
F ig u r e 5 - 1 9 .
R e f e r e n c e t o F ig u r e 5 -1 9 i n d i c a t e s t h a t t h e m odel s e n s e s
t h r e e p a r a m e t e r s :
E = t h e t r a c k i n g e r r o r
t = t h e d e r i v a t i v e o f t h e t r a c k i n g e r r o r
a n d W = t h e a n g u l a r v e l o c i t y o f t h e a i r c r a f t
The m o d el c o m b in e s t h e s e i n p u t s d y n a m ic a l ly t o p ro d u c e an o u t
p u t t o r q u e t o t h e g u n . The m o d el i t s e l f c o n t a i n s s i x p a r a
m e te r s :
T = hum an o p e r a t o r d e a d t im e = 0 .1 5 s e c .
T j = m a jo r hum an t im e c o n s t a n t = 1 .0 s e c .
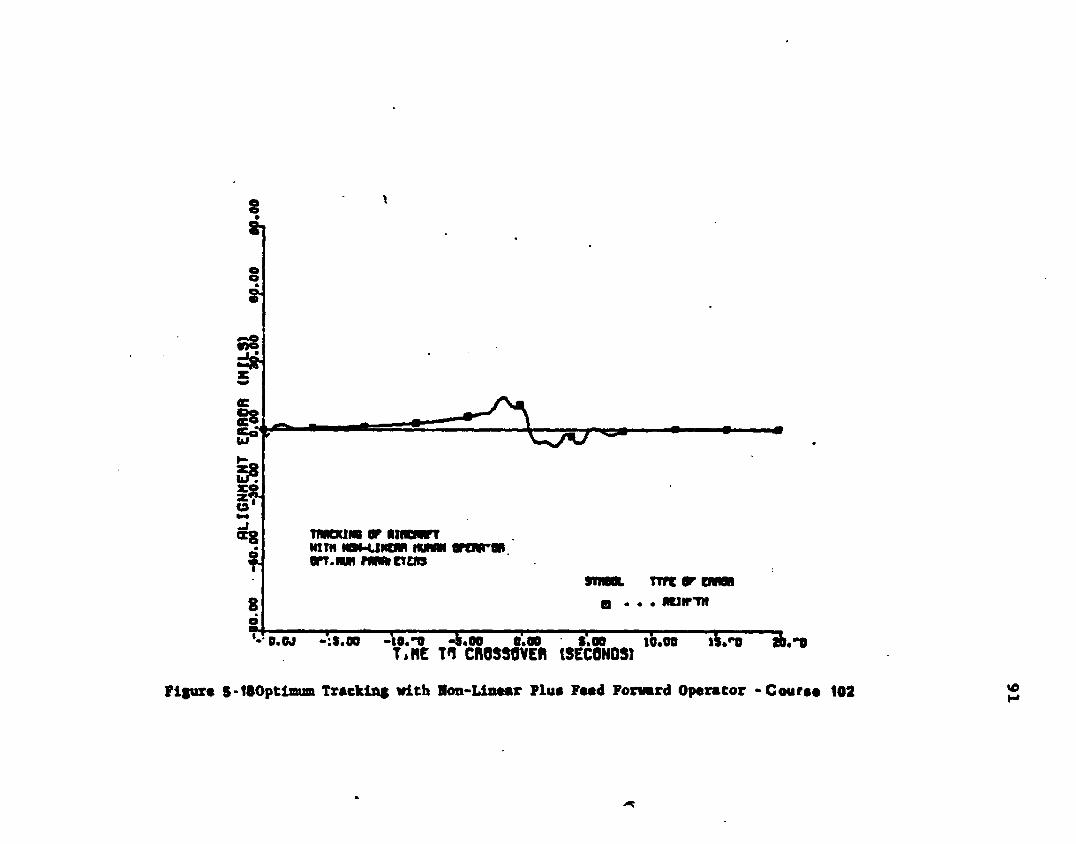
o
tmckjw op ftinmnrM1TN NON-U NOW HUM
mvmctoberr
•10. -o - S T o c 0T00 sToo T*ME Tl CROSSOVER (SECONOS)
:s.oo 10.00
Figure 5-1SOptlmua Tracking with Non-Linear Plue Feed Forward Operator * Course 102

(D ttoy)
(Aircraft ongulor vilocity)
(T1S+l)(TilS + l )( Torque)
FIGURE 5-1* TRACKING MODEL O F HUMAN OPERATOR

93
Tn = n e u ro m u s c u la r l a g = 0 .2 s e c .
p l» p2 t p 3= e m p i r i c a l c o n s t a n t s
S in c e T , T j a n d Tn a r e c o n s t a n t s t h a t h a v e b e e n e v a l u a t e d i n
p r e v i o u s w o rk 3®*3? t h e i r v a l i d i t y h a s b e e n w e l l d o c u
m e n te d , t h e s e w e re n o t a l t e r e d a n d t h e m odel w as tu n e d b y
a d j u s t i n g o n ly pj_, P2 , a n d P3.
T h is w as a c c o m p l is h e d i n t h e f o l l o w i n g m a n n e r . The
h y b r i d c o m p u te r s i m u l a t i o n o f t h e s y s te m , a s d e s c r i b e d in
C h a p te r 4 , w as u t i l i z e d e x t e n s i v e l y i n t a k i n g t r a c k i n g d a t a .
B a s i c a l l y t h e o n ly d i f f e r e n c e b e tw e e n t h i s m odel an d t h e a l l
d i g i t a l s i m u l a t i o n i s t h e f a c t t h a t o n e u s e s an a c t u a l human
o p e r a t o r w h i l e t h e o t h e r u s e s t h e m o d e l o f t h e hum an d e s c r i b e d
a b o v e . T h e r e f o r e , d a t a w as t a k e n on t h e h y b r i d c o m p u te r m odel
a n d u s e d t o s e l e c t t h e p a r a m e t e r s o f t h e hum an o p e r a t o r m o d e l.
The d e t a i l e d p r o c e d u r e i s d e s c r i b e d b e lo w .
F i r s t , p a r a m e te r s t o u s e i n t h e gun m o d el ( s e e S e c t i o n
3 .4 ) o f b o th s i m u l a t i o n s w e re s e l e c t e d a s
iT# = = 5 .0 s l u g - f t 2
B# = = 1 6 .0 f t - l b - s e c
A d e s c r i p t i o n o f t h e f l i g h t p a t h s s e l e c t e d c a n b e fo u n d i n
T a b le 3 o f S e c t i o n 3 .5 . T hey c o n s i s t e d o f a l e v e l f l y - b y a t
450 k n o t s a n d 375 f t . a . g . l . a n d a t m inim um d i s p l a c e m e n t s
f ro m t h e gun o f 600 f t . ( c o u r s e 1 0 1 ) , 1800 f t . ( c o u r s e 1 0 2 ) ,
an d 2700 f t . ( c o u r s e 1 0 3 ) .

94
A t o t a l o f f o u r t e e n r u n e w e re m ade w i th t h e s e f l i g h t
p a t h s a n d t h e a b o v e i n d i c a t e d gun p a r a m e te r s on th e h y b r i d
c o m p u te r w i t h a c t u a l o p e r a t o r s t r a c k i n g t h e t a r g e t a s d i s
p la y e d o n e l e c t r o n i c s c o p e s . T he a v e r a g e t r a c k i n g p e r fo rm a n c e
f o r t h e t h r e e f l i g h t p a t h s a r e show n i n F ig u r e s S - 2 0 , 5 - 2 1 ,
a n d 5&22.
The d i g i t a l m o d e l o f t h e human o p e r a t o r w as tu n e d by
r u n n in g t h e m odel on t h e i d e n t i c a l c a s e an d m in im iz in g th e
d i f f e r e n c e b e tw e e n t h e a v e r a g e t r a c k i n g d a t a an d t h e o u t p u t o f
t h e a l l d i g i t a l m o d e l. B e c a u se o f t h e l a r g e e r r o r s o c c u r in g
i n t h e c a s e w i t h 600 f t . d i s p l a c e m e n t , i t w as fo u n d t h i s c a s e
w as f a r o u tw e ig h in g t h e r u n s a t 1800 f t . a n d 2 700 f t . S in c e
t h e l a t t e r tw o c a s e s a r e c o n s i d e r e d t h e m ore i m p o r t a n t , t h e
600 f t . c a s e w as d i s r e g a r d e d i n d e te r m in in g t h e s e p a r a m e t e r s .
I t w as fo u n d t h a t t h e s e t o f p a r a m e t e r s t h a t g a v e t h e b e s t
f i t w e re :
P i = 1 .8 3 f t - l b - s e c / r a d i a n
P2 = 110 r a d i a n s 3/ f t - l b - s e c
P 3 = 1 1 .4 1 f t - l b - s e c / r a d i a n
C o m p ariso n o f t h e hum an o p e r a t o r m odel w i th t h e a v e r a g e
t r a c k i n g p e r fo rm a n c e a r e show n i n F ig u r e s 5 -2 3 , 5 - 2 4 , 5 - 2 5 , an d
5 - 2 6 . T h e se f i g u r e s i n d i c a t e t h a t w h i l e t h e m odel a d e q u a te ly
r e p r o d u c e s a v e r a g e p e r fo rm a n c e b e f o r e c r o s s o v e r , i t i s h i g h l y
s u p e r i o r a f t e r c r o s s o v e r . T h is s u g g e s t e d t h a t tw o s e t s o f
hum an p a r a m e te r s m ig h t b e u s e d , o n e s e t p r i o r t o c r o s s o v e r
a n d t h e o t h e r s e t a f t e r c r o s s o v e r . T h is c a u s e s no l o s s o f

Azi
mut
h Er
ror
(mil
s)
95
F lig h t Path 101 Cun l’araiNft.ors
J ■ 3B « 16
40 800
30
- 1400
200
— 200-10
-20 —400
-30Note change
of sca le
-20 -10 20
Time to Crossover (Seconds)
Figure t-aoa Average Human O perator T racking Performance - I

Ele
vatio
n Er
ror
(mil
s)
96
F lig h t Path 101 Gun Param eters
J m 5B ■* 16
100
50
100
-200
-250
-20 -10 0 10 20
Time to Crossover (Seconds)
F igure S*i*b Average Human O perator Tracking Performance - I

Azi
mut
h Er
ror
(mil
s)F l ig h t Path 102 Gun Paraiceters
-20
-40
-60 -20 -10 10Time to Crossover (Seconds)
Figure s-2ia Average Hunan Operator Tracking Perfornance - I I

Kle
vatio
n Er
ror
(mil
s)
F lig h t Path 102 Gun Parameters
J - 5
-10
-20 -10 0 1C 20Time to Crossover (Seconds) W
00
Figure S - » l b Average Human O perator Tracking Performance - I I

Axl
auth
Er
ror
(mil
t)
t
n ig h t Path 103 Gun Parameters
10
-20
-10 0-20 10 20Time to Crossover (Seconda)
«Figure M U Average Hunan Operator Tracking Performance - 1X1

f-;l«
?vat
ion
Krro
r (m
fla)
F lig h t Path 103 Gur. Parameters
J = 5B = 16
10
-20 -10 0 10 20*9
Time to Crossover (Secoads)
Figure Average Human Operator Tracking Performance - I I I
100

Acl
nuth
Er
ror
(mll
a)
Flight Path 102• Aslauth Operator60
60
20
20
-40
-60-10 0 10-20 20
Tine to Crossover (Seconds)Figure •-*» Performnce of Huaen Operator Model - I
101

Elev
atio
n Er
ror
(all
s)Flight Path 102Elevation Operator
Hybrid Kesults
SSP Model
-20
0 10-10 20-20Tine to Crossover (Seconds)
Figure *-*« Performance of Hasan Operator Model - I I
i

Azi
mut
h Er
ror
(ini
Is)
F light Bath 103Azimuth Operator
Hybrid R esults
SSP Model
-60-20 -10 0 10 20
Time to Crossover (Seconds)
Figure »-** Performance o f Human Operator Model - I I I
103

Kit!
vat
Lon
Erro
r (m
lla)
F light Path 103Elevation Operator
-10 Hybrid R esu lts
SSP Model
-2010-20 0 10 20
Time to Crossover ( Seconds)
F igure S-Ii Performance of Human O perator Model - IV
104

105
g e n e r a l i t y i n t h e m o d e l a n d c a n b e j u s t i f i e d on t h e p r e m is e
t h a t a t r a i n e d o p e r a t o r d o e s f o l l o w a d i f f e r e n t s t r a t e g y in
t r a c k i n g a t a r g e t b e f o r e a n d a f t e r c r o s s o v e r . B e fo re c r o s s
o v e r , h e i s c o n c e rn e d w i t h k e e p in g up w i t h t h e a c c e l e r a t i n g
t a r g e t , w h i l e a f t e r c r o s s o v e r , i f h e l a g s t h e t a r g e t h e
r e a l i z e s t h e d e a c c e l e r a t i n g t a r g e t w i l l f l y i n t o h i s r e t i c l e
i f h e s im p ly m a i n t a i n s t h e sam e gun m ovem ent.
T h is p r o c e d u r e w as f o l lo w e d a n d r e s u l t e d i n a d o u b le
s e t o f p a r a m e t e r s (D S P ). The op tim um p a r a m e te r s a r e i n d i
c a t e d i n T a b le 5 .
R e s u l t s w i t h t h e s e p a r a m e te r s a r e show n i n F ig u r e s 5 - 2 7 ,
5 - 2 8 , 5 - 2 9 , a n d 5 -3 0 f o r t h e l e v e l f l i g h t p a th s 102 a n d 1 0 3 .
I t i s s e e n t h a t t h i s DSP m o d el p r o d u c e s e x c e l l e n t d u p l i c a t i o n
o f t h e a v e r a g e t r a c k i n g d a t a .
F u r t h e r s t u d i e s w i t h t h i s p a r t i c u l a r hum an o p e r a t o r
m odel i n d i c a t e d t h a t t h e p a r a m e t e r Pg i s s t r o n g l y d e p e n d e n t
upon t h e v a lu e o f t h e d r a g c o e f f i c i e n t , B , i n t h e gun m o d e l,
a n d b e s t r e s u l t s a r e o b t a i n e d when t h e tw o a r e n u m e r i c a l ly
e q u a l . I n t h e s t u d y b e in g d i s c u s s e d h e r e , t h e v a lu e o f B
u s e d w as 1 6 .0 f t - l b - s e c , a n d o p t i m i z a t i o n p r o c e d u r e s fo u n d
v a l u e s o f Pg ( i n t h e DSP m o d e l) o f 1 5 .0 a n d 1 7 .1 4 f t - l b - s e c .
I n s u b s e q u e n t w o rk , s t u d i e s 2 an d 3 , t h e v a lu e o f t h e human
o p e r a t o r p a r a m e te r s w e re a s i n d i c a t e d i n T a b le 5 w i th t h e
e x c e p t i o n o f Pg w h ic h w as a d j u s t e d t o b e n u m e r i c a l ly e q u a l t o
t h e gun d r a g c o e f f i c i e n t , B . R e s u l t s w i t h t h e p a r a m e te r s f o r
S t u d i e s 2 a n d 3 a r e i n d i c a t e d i n F i g u r e s 5 - 3 1 , 5 - 3 2 , 5 - 3 3 , a n d
5 - 3 4 .

106
ZABLE 5
-'*4 » * »j&jkjdAev‘fo'tlauM FdrSttatare for as? ' Huaari O perator .Model
Before Crotiovar A fter Crossover
P f t- lb -se c /ra d ia n 2 .4 2 .4
P2 radian3/ f t - lb - s e c 4848.0 8.23 x 105
P3 ft- lb -se c /ra d ia n 15.0 17.14

Aalm
uth
Erro
r (n
ils)
I
Flight Path 102Aaiauth Operator
60
•20
- - Hybrid teau lta
- 4 0
-60-10 10-20 0 20
Time to Croaaovar (Seeonda)Figure f-tr Performance of OOP Human Operator 'iodel - 1
107

F light Path 102Elevation Operator t
Hybrid R esu lts
DSP Model
W
-10 0 10 20 Time to Crossover (Seconds)
Figure 1 11 Performance of DSP Human Operator Model - II

Azi
mut
h K
rror
(mil
s)
F light Path 103Azimuth Operator
Hybrid R esu lts
DSP Model-40
-20 -10 0 10 20Time to Crossover (Seconds)
Figure Performance of DSP Human O perator Model - I I I
109

Ele
vatio
n Er
ror
(ml
U)
Flight Path 103Elevation Operator
10
0
Hybrid R esultsV- /
DSP Model
10-20 10 0 10 20
Tine to Crossover (Seconds)
Figure S*S§ Performance o f DSP Human O perator Model - IV
110

Flight Psth 102Asiauth Operator
40
hOI*uhi
M<
-10
-20-20 -10
Tiae to Crossover (Seconds)Figure l - l u Mesa Tracking Error froa Model £or l y i t i s 3-1
I
111

Ele
vatio
n Er
ror
(Mila
)
Flight Path 102Elevation Ooerator
i-
5
0
-5
-20 -10 0 10 20
Time to Crossover (seconds)
Figure Mean Tracking E rro r from Model fo r System 3-1
112

A?.li
;nith
Er
ror
(mil
s)
Flight Path 103Azimuth Operator
20
10
0
-10
-20 -10 )00 20
Time to Crossover (seconds)
Figure s-sia Mean Tracking Error from Model for System 3 -II
113

Flight Fath 103Elevation Operator
Tin* to Crossover (seconds)
Figure S^skb Mean Tracking E rror from Model fo r System 3 - I I

Azi
mut
h Er
ror
(mH
n)Flight Path 102Azimuth Operator
15
10
5
0
5
-20 - 1 0 100 20
Time to Crossover (seconds)Figure Mean Tracking Error from Model for System 2-1
115

Klc
v.it
io
n Er
ror
(mil
s)
FIight Path 102Elevation Operator
-10 10-20
Time to' Crossover (seconds)Figure Mean Tracking Error fron Model for System 2-1

Azi
mut
h Er
ror
(mil
s)F’ ight Path 103Azimuth Operator
5
0
5
0-20 10 20
Time to Crossover (seconds)Figure 5-34M Kean Tracking Error from Model for System 2 -II

Ele
vatio
n Er
ror
(mild
)
F light Path 103Elevation Operator
5
0
5
-20 -10 0 10 20Tine to Crossover (seconds)
Figure S-J^Kean Tracking Error from Model for Systen 2 -II 118

119
5 .3 . V e r i f i c a t i o n o f t h e T r a c k in g Mode M bdel
The s e v e r e s t t e s t o f a lm o s t a n y c o m p u te r s i m u l a t i o n i s
t h e d e t e r m i n a t i o n a s t o w h e th e r t h e s i m u l a t i o n c a n p r e d i c t
r e s u l t s f o r a s e t o f c o n d i t i o n s q u i t e d i s s i m i l a r t o t h o s e f o r
w h ic h t h e p a r a m e te r s i n t h e m o d el w e re t u n e d . D u r in g th e
c o u r s e o f t h i s r e s e a r c h , much d a t a w as r e c o r d e d on t h e t r a c k i n g
p e r fo rm a n c e o f hum an o p e r a t o r s , u s i n g t h e h y b r i d c o m p u te r .
T h e se r u n s i n c o r p o r a t e d t h e gun p a r a m e te r s o f S t u d i e s 2 an d 3 ,
b u t , o f c o u r s e , h a d a c t u a l o p e r a t o r s d o in g t h e t r a c k i n g .
T he f l i g h t p a th s u s e d i n t h i s s t u d y w e re , h o w e v e r , f a r
d i f f e r e n t fro m t h e low l e v e l f l y - b y f ro m w h ic h t h e human
o p e r a t o r m o d e l p a r a m e te r s w e re d e te r m in e d . T h e se f l i g h t p a th s
( a i r c r a f t m a n e u v e rs ty p e I I ) a r e d e s c r i b e d i n S e c t i o n 3 .5 and
i n A p p e n d ix B .
A c o m p a r is o n o f t h e p e r f o rm a n c e o f t h e m o d el v e r s u s th e
a v e r a g e t r a c k i n g p e r fo rm a n c e o f t h e o p e r a t o r s u s i n g th e
h y b r i d may b e s e e n i n F ig u r e s 5 -3 5 th r o u g h 5 -5 2 . F ig u r e s
5 -3 5 th r o u g h 5 -4 4 co m pare p e r f o r m a n c e s u s i n g t h e S tu d y 2 gun
m o d e l , w h i l e F ig u r e s 5 -4 5 th r o u g h 5 -5 2 co m p are S tu d y 3 gun
m odel p e r f o r m a n c e s . T h ese c a s e s w e re c h o s e n f o r p r e s e n t a t i o n
s i n c e e a c h a v e r a g e p e r fo rm a n c e r e p r e s e n t s t h e r e s u l t s o f a t
l e a s t f o u r d u p l i c a t e r u n s .
As c a n b e s e e n fro m t h e s e f i g u r e s , t h e m odel d o e s an
e x c e l l e n t jo b o f p r e d i c t i n g t h e m ean t r a c k i n g e r r o r f o r
f l i g h t p a t h s g r e a t l y d i f f e r e n t f ro m t h o s e f o r w h ic h t h e p a r a
m e te r s o f t h e m o d e l w e re t u n e d . T h is l e a d s o n e t o h a v e a

FLIGHT PATH. « 1. STUDY.,# 2
O.XKT
FIG
s .o r
n .
* - PREDICTED HERN ERRQRa PREDICTED HERN ERROR®
n .LS.OO 2 6 .QQT1HE I3EC!
3 1 .0 0 ;.oa ' 7 . 0 0 a .o o
5-35 AZIMUTH ERROR VS TIME
120

dFLIGHT PATH n 1 STUDY « 2eO -
.u
« - AVERAGED HUMAN ERROR — PREDICTED MEAN ERRORn
'O.QO '10.0003
FIG 5-36 ELEVATION ERROR 75 TIME-
121

FLIGHT PATH # 5 STUDY # 2
a .a o 5 .0 0
PREDICTED HERN ERR0Ro PREDICTED HERN ERROR®
IQ .00 15 .00 LS.QOTIRE (SEC)
3 1 .0 0 ;.oo 7 .0 0 ee .o o
F I G . 5 - 37 AZIMUTH ERRDR VS TIME
122

„FLIGHT PATH # 5 STUDY « 2e
R
* - AVERAGED HUMAN ERROR _ PREOICTEO MEAN ERROR
ik .Q Q 2 0 0 0TIME (SEC)
asToo*a.oo S .00 10 .QQ 30.00 10.00
F I G . 5 - 3 8 ELEVATION ERROR VS TIME 123

FLIGHT PATH.« 6 STUDY8 # 2
J.OO 5 ,0 0 10.00
* - PREDICTED MEAN ERROR PREDICTED HERN ERROR
.OQ ZS.OQTIRE (3ECI
a t .o aT
.00 17.00 ZE.OQ
F I G . 5 - 3 9 AZIMUTH ERROR VS TIME
124

„FLIGHT PATH « 6 STUDY # 2e
o .
Ui
* - AVERAGED HUMAN ERROR _ PREOICTED MEAN ERRORe
1Q.QQ lk .0 0 ZQ.QQ STOOTIME (SEC)
5 .0 0 ssToo0.00 0 0 .QQ
F I G . 5-40 ELEVATION ERROR VS TIME
X25

.FLIGHT PATH # 11 STUDY # 2eO -
UJ
« - AVERAGED HUHRN ERROR — PREOICTEO HEAK ERROR
l t .0 0 eb.QQ e&.QQTIRE C3EC1
S.QQ 10.00 3 0 .0 0
F I G . 5-41 AZIMUTH ERROR VS TIME

.FLIGHT PATH « 11 STUDY # 2en .
o .
— •*- AVERAGED HUHRN ERROR PREDICTED HERN ERROR
5 7 o O 3 0 .0 0 SToo V I. 00o
' 0.00 6.00
F I G . 5-42 ELEVATI UN ERROR VS TIME
X27

ERRO
R IM
JLS)
so
.ao
-lo.o
o o.o
o to
.oo
ao.oo
ao
.oo FLIGHT PATH # 16 STUDY * 2
S . 00 10.00
« - AVERAGED HUMAN ERRJR PFIEOJCTEO MEAN ERMA
lk.oo sa.oo er.oo TIME (3EC)
HO.OO
F I G . 5 - 4 3 AZIMUTH ERROR VS TIME

.FLIGHT PATH # 16 STUDY # 2o
o-
AVERAGED HUMAN ERROR PREOICTEO MEAN EflflOAo
ik.QQ c b .o a S T o oTIME C3EC1
1Q.QQ
F I G . 5 - 4 4 ELEVATION ERROR VS TIME
129

s F L I G H T PATH # 6S i
m eo. attime oeci
F I G . 5 - 4 5 AZIMUTH
STUDY # 3
— ------ — nVEBRCEO HUttfW ERROR________ rREOlCTEO HERN ERROR
Elat S lo t j t jm 3 T h 3
ERROR VS TIME

s F L I G H T PATH *Si
8i
is
§
&i
STUDY * 3
■*- nVERRCCO NIMflN EMI on rREOlCTEO HERN ERROR
*•.00 u '.m s ', oq iSr. ib. oo cb.ai 5 7 5 5 7 5 si.oo 5 7 5 5 .TIME OEC)
F I G . 5-4 6 ELEVATION ERROR VS TIME

8 F L I G H T PATH * 10S t
'o.qq (i.oo b.oo ic.oo 16 .00 ra.ooTIME (3CC1
F I G . 5-4 7 AZIMUTH
STUDY * 3
averaged hunrn E m mfflEOICTCO HERN eiWOK
eb.oo .00 j k .
ERROR VS TIME
132

^FLIGHT PATH * 10*1
STUDY * 3
8
8
88.
RVERRCCQ HUNRN ENNOfl rntO IC T E O HERN ERB03
zU. <io 3 l*0.00 11.30 8 -0 3 .in ts.oo tfi.ai TINE (SEC1
S.OB 86.08
F I G . 5-4 8 ELEVATION ERROR VS TIME

sFLIGHT PATH # 15 STUDY * 3
m
averageo humw z tm mPflEOICTCO HERN ENRON
*0.00 TToo 16. 00 R .O I cU .oi 3TooTINE (3EC1
F I G . 5 - 4 9 AZIMUTH ERROR VS TIME

non
(mjl
s)-FLIGHT PATH * 15 STUDY # 3
».ooTIHE :3EC
«----- * - n v c n n o c o H'i.inN EM IttlMEOJCTEO HE AN E M OH
~m 3k.« « h .a
F I G . 5-50 ELEVATION ERROR VS TIME

sFLIGHT PATH a 208
*1.00 «.ao tjO O b u mT in e cstci
F I G . 5 - 5 1 AZIMUTH
STUDY # 3
RVEMGCO HUnW OKI OR n v E o r r r e a HEiw a m m
3C t r 3 * a T ak. at
ERROR VS TIME 136

sFLIG-HT PATH # 2CT STUDY » 3
an
A v cn o cco HUNAN e rv ia aMEDIC TED MEAN EAflOfl
1C. 00 . 10.00 CO. 00TINE OEC)
'•.00 U.00 00 00.
F I G . 5-52 .ELEVATION ERROR VS TIME 137

138
g r e a t d e a l o f o o n f id e n e e i n t h e a b i l i t y o f t h i s m odel t o p r e
d i c t t h e t r a c k i n g e r r o r s f o r a lm o s t a n y f l i g h t m a n e u v e r .
5 . 4 . The A c q u i s i t i o n M ode. The o t h e r c h a r a c t e r i s t i c
mode i n c o r p o r a t e d i n t o t h e hum an o p e r a t o r m o d e l w as t h e a c q u i
s i t i o n m ode. D u r in g t h i s p h a s e o f o p e r a t i o n t h e o p e r a t o r
r e a c t s r a p i d l y t o l a r g e d i s t u r b a n c e s ( i . e . , e r r o r s i g n a l s o u t
s i d e t h e n o rm a l t r a c k i n g dom ain a s d e f i n e d b y F ig u r e 5 - 1 ) b y
a p p ly i n g a maximum d r i v i n g f o r c e t o t h e a p p a r a t u s b e in g c o n
t r o l l e d . I n o t h e r w o rd s , t h e hum an o p e r a t o r r e a c t s t o l a r g e
e r r o r s i n a m a n n e r s i m i l a r t o a b a n g -b a n g c o n t r o l l e r . I t i s
t h i s t y p e o f human c o n t r o l a c t i o n t h a t h a s b e e n d e v e lo p e d i n
S e c t i o n 5 .4 1 .
Due t o t h e s e v e r e n o n l i n e a r i t i e s i n t h e s y s te m n e a r
c r o s s o v e r t h e s w i t c h in g e q u a t i o n s becam e d i v e r g e n t , t h u s m ak in g
i t n e c e s s a r y t o m o d ify t h e m o d e l . T h is m o d i f i c a t i o n i s d e s
c r i b e d i n S e c t i o n 5 .4 2 .
5 .4 1 . D e r i v a t i o n o f S w i tc h in g T im e s . O nce t h e n o n l i n e a r
gun m o d el w as l i n e a r i z e d ( s e e A p p e n d ix 6 ) u s i n g a t r a n s f e r
f u n c t i o n o f t h e fo rm :
# ( s ) a K ( 5 .4 1 - 1 )"TTTaT s TR - 4 1 )—
w h e re u ( s ) = a p p l i e d o p e r a t o r t o r q u e
f ( s ) = a z im u th a n g le
K = gun t r a n s f e r f u n c t i o n g a in
T a gun t im e c o n s t a n t

139
a s e t o f a l g e b r a i c e q u a t i o n s w e re d e v e lo p e d f ro m w h ic h t h e
s w i t c h in g t im e s f o r t a r g e t a c q u i s i t i o n w e re c a l c u l a t e d .
G iv en t h e gun p o s i t i o n , when t h e a c q u i s i t i o n mode i s
e v o k e d a n d a i r c r a f t f l i g h t p a t h d a t a a lo n g w i th t h e t r a n s f e r
f u n c t i o n , e q u a t io n 5 . < t l - l , E q u a t io n 5 .U 1 -1 c a n b e r e w r i t t e n
a s ;
T # + f = K U ( t ) (5 .* * 1 -2 )
s u b j e c t t o t h e f o l lo w in g c o n s t r a i n t o n to r q u e
M 4 U ( t ) £ - M ( S . m - 3 )
w h e re M = l i m i t on to r q u e
a n d b o u n d ry c o n d i t i o n s
g o = $ ( t o )• * a t t = t fl| o ~ 9 ( t o ) °. (5 .W .-U )• f = # ( t f )
a t t = t f# f = f ( t f )
The p ro b le m now becom es a s e c o n d o r d e r , l i n e a r t im e o p t im a l
c o n t r o l p ro b le m w i th a c o n s t r a i n e d m a n ip u la te d v a r i a b l e .
The s o l u t i o n o f t h i s p ro b le m f o r t 0 = 0 i s
M o * t 4 t B
U Ct) = -H f o r t s 4 t ( 5 .H 1 -5 )
0 t w t f
w h e re t g = s w i t c h in g t im e
t f = c o m p le t io n o f a c q u i s i t i o n .

140
E u q a t io n 5 .4 1 - 2 c a n b e s o l v e d f o r t h e c a s e w h e re
o 4 t 4 t 8 a n d u C t) = M
| = TCK-M - $0 ) Exp C - t /T ) + K -M -t + (# 0 + T (# c - K-M))
( 5 .4 1 - 6 )
• »# = (# o - K-M) ex p C - t /T ) + K-M ( 5 .4 1 - 7 )
a n d w h e re t s 4. t « i t f w i th u ( t ) = -M
e| = - t / O f + K ‘M \ e x p C - t /T ) - K*M*t + ( 8 f + K .M »tf
e x p C - t f / T ) / + T + ( 5 .4 1 - 8 )
* / *
• =/ t f » y»M \p y p C - t /T ) - K - M . ( 5 .4 1 - 9 )V, ex p C-tf/T)/
To o b t a i n e q u a t i o n s f o r t s a n d t f t h e v a lu e s f o r 0 g iv e n b y
e q u a t i o n s 5 .4 1 - 6 a n d 5 .4 1 - 8 w h e re t = t s a r e s e t e q u a l t o
e a c h o t h e r , l i k e w i s e f o r 0 . T h is y i e l d s tw o e q u a t i o n s a n d
tw o unknow ns ( t s a n d t f ) , w h ic h upon r e a r r a n g e m e n t a r e :
.(. +. k .H ) exp- < t s / T ) - i - --------------— - ------------------------- , ----------------------------( 5 .4 1 - 1 0 )e x p C - ( 2 t s + _ 1 _ ( $ - + TC8 - 8 f ) ) / T )
K-M ° T © T
= 2K-M + (8 ^ - k -M) e x p ( - t s / T )
a n d
t f a 2 t s + _ 1 _ ( # Q - | f + T C |0 - # f ) ) . ( 5 .4 1 - 1 1 )K.'M

141
The s o l u t i o n o f e q u a t io n s S . 4 1 -1 0 a n d 5 .4 1 - 1 1 i n v o lv e s
a n e s t e d I n t e r a c t i v e p r o c e d u r e b e c a u s e e q u a t i o n 5 .4 1 -1 0 c a n n o t
b e s o l v e d e x p l i c i t l y f o r t fl a n d a v a lu e f o r t f m u s t b e a ssu m ed
b e f o r e t h e f i n a l , c o n d i t i o n s c a n b e c a l c u l a t e d . The f i n a l c o n d i -*
t i o n f o r # a n d & c a n b e c a l c u l a t e d s i n c e t h e a im v e c t o r
( F ig u r e 3 -2 ) a n d t h e v e c t o r fro m t h e gun p o s i t i o n t o t h e t a r g e t
m u s t b e c o i n c i d e n t . T hus o n c e h a v in g a ssu m e d t f , t h e t im e o f
a c q u i s i t i o n , a n d k n o w in g t h e f l i g h t p a t h , ^ f a n d c a n be c a l
c u l a t e d fro m t h e f o l l o w in g e q u a t i o n s :
® f 5 t a n " 1 ( Yt f \A Xt f /
( 5 .4 1 - 1 2 )© f = X .> - Y . . )
* t f 2 + ^ f 2
5 .4 2 . A c q u i s i t i o n a t C r o s s o v e r . As n o te d i n t h e i n t r o
d u c t i o n o f t h i s s e c t i o n , t h e a c q u i s i t i o n mode w as m o d if ie d n e a r
c r o s s o v e r d u e t o d iv e r g e n c e o f t h e s w i t c h in g e q u a t i o n s . The
p r im a r y f a c t o r s c o n t r i b u t i n g t o t h e i n s t a b i l i t y a r e t h e s e v e r e
n o n l i n e a r a l l t i e s o f t h e f l i g h t p a t h , w hen d e s c r i b e d i n s p h e r o id
c o o r d i n a t e s , a n d t h e b r e a k down o f t h e l i n e a r i z e d gun m odel
n e a r c r o s s o v e r .
The m o d i f i c a t i o n , t e l e o l o g i c a l i n n a t u r e , c o n s i s t s o f
a p p ly i n g maximum t o r q u e , f o r c i n g t h e g un t o l e a d t h e p l a n e ,
t h e n a p p ly i n g o n ly a s m a l l b r e a k i n g t o r q u e u n t i l t h e p l a n e f l i e s

142
i n t o t h e p r o p e r s i t e a l i g n m e n t . T he i d e a f o r t h e l e a d m o d i
f i c a t i o n i a fo u n d e d l a r g e l y o n e x p e r i e n c e g a in e d w h i l e t r a c k i n g
t a r g e t s u s i n g t h e h y b r i d s i m u l a t o r .
I n t h e r e g i o n o f c r o s s o v e r , c r o s s o v e r i s t h e p o i n t o f
m inimum d i s t a n c e b e tw e e n gun a n d p l a n e , t h e a n g u la r v e l o c i t y
o f t h e p l a n e e x c e e d s t h e maximum s le w r a t e o f t h e g u n . The
b e a t t r a c k i n g s t r a t e g y a t r a i n e d o p e r a t o r c a n u s e i s t o a p p ly
maximum to r q u e o n t h e gun u n t i l h e r e a c q u i r e s t h e t a r g e t .
F i e l d i n g 2 r e f e r s t o a n o p e r a t o r i n t h i s s i t u a t i o n a s a p r a c o g
n i t i v e s i g n a l g e n e r a t o r .
The l e a d mode i s in v o k e d w hen t h e t a r g e t i s n o t i n t h e
t r a c k i n g d o m ain ( F i g . 5 -1 ) an d n e a r c r o s s o v e r ( l e s s t h a n
2 5 0 0 ' f ro m s i t e ) . I f t h e t a r g e t i s n o t n e a r c r o s s o v e r t h e
a c q u i r e mode i s u s e d . A lth o u g h n o t u s e d i n t h i s w o rk , a
b e t t e r m eans o f i n v o k in g t h e l e a d mode w o u ld b e t o t e s t t h e
a n g u l a r v e l o c i t y o f t h e t a r g e t i n s t e a d o f t h e n e a r n e s s t e s t .
T h is c r i t e r i o n w o u ld b e b e t t e r b e c a u s e i t i s t h e a n g u la r
v e l o c i t y o f t h e t a r g e t e x c e e d in g t h e gun s le w r a t e t h a t l e a d s
t o t h e d iv e r g e n c e o f t h e s w i t c h i n g e q u a t i o n s . A f lo w c h a r t
o f t h e m u l t i - m o d a l t r a c k i n g m o d e l i s show n i n F ig u r e 5 - 5 3 .
5 . 5 . V e r i f i c a t i o n o f t h e A c q u i s i t i o n Mode M o d e l.
P r o b a b ly t h e b e s t way t o ju d g e t h e e f f e c t i v e n e s s o f t h e a c q u i
s i t i o n mode i s f i r s t t o r e v ie w t h e n e e d f o r i t s a d d i t i o n t o
t h e o p e r a t o r m o d a l a n d t h e n s e e how w e l l i t f u l f i l l s t h e
r e q u i r e m e n t s . T he a c q u i s i t i o n mode w as a d d e d t o :

143
1 . P r o v id e a n a a n s o f q u i o k l y a c q u i r i n g a now t a r g e t ,
2 . A llo w t r a c k i n g o f p l a n e s t h a t p a s s v e r y c l o s e t o t h e
o p e r a t o r , a n d
3 . A llo w t r a c k i n g o f i n p u t s i g n a l s w h ic h may c o n t a i n
d i s c o n t i n u i t i e s .
i t s h o u ld b e n o t e d t h a t im p ro v e m e n ts i n t h e n o n - l i n e a r t r a c k i n g
m o d e l r e d u c e d t h e im p o r ta n c e o f t h e s e c o n d r e q u i r e m e n t to w a rd
t h e e n d o f t h i s r e s e a r c h .
A c o m p a r is o n o f t h e p e r f o r m a n c e o f t h e d u a l-m o d e m odel
v e r s u s t h e s in g le - m o d e ( t r a c k i n g o n ly ) m o d e l f o r a c q u i s i t i o n
o f t a r g e t s u s i n g t h e s e t s o f g u n p a r a m e te r s may b e s e e n i n
F i g u r e s 5 -5 4 (A a n d B) th r o u g h 5 -5 6 (A a n d B ) . The c o m p a r i
s o n s w e re m ade f o r t a r g e t s w i t h 400 a n d 1000 m i l l s o f a l i g n
m e n t e r r o r . A P e r fo rm a n c e I n d e x ( t h e i n t e g r a l o f t h e e r r o r
s q u a r e d 'I S A ' o v e r t h e f i r s t s e v e n s e c o n d s ) i s a l s o g i v e n .
As c a n b e s e e n fro m t h e s e f i g u r e s , t h e d u a l-m o d e m o d e l
a c q u i r e s t h e t a r g e t r a p i d l y w i t h l i t t l e o s c i l l a t i o n , e v e n
when t h e i n i t i a l e r r o r i s v e r y l a r g e ; w h e r e a s , t h e s i n g l e -
mode m o d e l w as s l o w e r t o r e s p o n d f o r s m a l l i n i t i a l e r r o r s an d
o v e r - s h o t t h e t a r g e t f o r t h e l a r g e e r r o r s .
F i g u r e s 5 7 -6 0 show t h e r e s u l t s O f s i m u l a t i o n s a t c r o s s
o v e r w h e re t h e p l a n e cam e n e a r t h e g u n . H e re t h e a c q u i s i t i o n
m ode , w i t h t h e l e a d m o d i f i c a t i o n , p e r f o r m e d to o w e l l . I t
r e a c q u i r e d t h e t a r g e t a f t e r l o s i n g i t a t c r o s s o v e r w i t h o u t any
o v e r s h o o t . I n m o s t o f t h e d a t a s t u d i e d d u r i n g t h i s p r o j e c t .

144
COMPUTE PLAHB POSITION
COMPUTE ALIGNMENT BRROR |
OPERATOR IS INI AOQUIRB MOOB
YBS
NOOPERATOR IS IN LEAD MODE
IS ERROR WITHIN TRACKING DOMAIN
NOIS ERROR WITHIN TRACKING DOMAIN
YBS
IS PLANB NEAR CROSSOVER
+ NO&MPUTB SWITCHING
COMPUTBTORQUB
COMPUTBTORQUB
COMPUTBTORQUE
APPLY TORQUB TO TUB GUN AND CALCULATB
POSITION
FIGURB 5-53 FLOW DIAGRAM OF THE MULTI-MODAL TRACKING MODEL

SYSTEM No. 1
MAX. TORQUE
Difference Between Option*
I'm! and - multi-mode
and - tracking only
Model i s a Performance
— —— - Tracking only 1.068 X 10^— ■ i. Dual-node 5.141 X 10^
Optimum 4.851 X 10*
8 10 Tine (Sec)
FIGURE 54-A COMPARISON OF ACQUISITION PERFORMANCE

1000
500
SYSTEM NO. 1
Difference Between Optimum
•♦*/) and - multi-mode
and - tracking only
-500
-1000
MAX TORQUE
/
Model i s a Performance
Tracking only 1.041 X 10®Dual-Mode 7.503 X 10sOptimum 7.435 X 10?
10Time (Sec)
FIGURE 54-B COMPARISON OF ACQUISITION PERFORMANCE
12a*

400
200
8uuM
-200 .
MAX. TORQUE
-400
/
SYSTEM NO. 2
D ifference Between Optimum
end - w lti-m ode
and - tracking only
Model Is a Performance
Tracking only Dual-Mode Optimum
1.026 X 105 4.91 X 104 4.837 X 104
- I142 4 6 8
Time (Sec)FIGURE 55-A COMPARISON OF ACQUISITION PEEFOBMANCE
10 12
147

1000 SYSTEM NO. 2
D ifference Between OptimumMAX. TORQUE
and - au ltl-node500
and - tracking only
500 Model la a Performance
9.6147.437.415
1000
Tine (Sec)FIGURE 55-B COMPARISON OF ACQUISITION PERFORMANCE 148

SYSTEM NO. 3
MAX. TORQUED ifference Between Opt in n
and - mult i-node
and - tracking only
Model la a Performance200
1.224 X 105Tracking only
5.620 X 10H 4.90 X 104
■400
Time (Sec)
FIGURE 56-A COMPARISON OF ACQUISITION PERFORMANCE

1000*
500 -
uuM-500
-1000 .
SYSTEM HO. 3
Difference Between Optimist
and - track in g only
VMAX. TORQUE
Model i s a Performance
_ _ Tracking only
- Dual-Mode — . — Optimum
9.622 X 103
7.483 X 105 7.426 X 105
8Time (Sec)
FIGURE 56-B COMPARISON OF ACQUISITION PERFORMANCE
10 12 14
150

SYSTEM NO. 15 0 0 FT. FLY-BY COURSE
MODEL
TRACKING ONLY
DUAL*M OOE
i t MTIME (SCC1
FIGURE 5 * 5 7 p e r f o r m a n c e at c r o s s o v e r

SYSTEM N O -Zl o o FT. FlY-OY COURSE
MOO E l
TRACKING ONLY
D U A L -M O D E
FtSORfi 5 - 5 8 PERFORMANCE AT CROSSOVER

153 OHO XV 1O M V N O Q J014 I S - S 9 0 0 0 1 4
<9*S? 1MU
r \
r
i d o w - i v n a A1NO o n » mo v o x
1 9 0 0 M
3SOHOO 4 0 - /1 4 U4 ooS 1 -ON H31SAS

SYSTEM n o . 14 0 0 FT. FLV-W COURSE
MODEL
T R A C K I N G o i I L Y
D U A L-M O D E
F 1 6 U W S 'W O PttlfO AM A HCC AT CROSSOVER.

ERRO
R (M
ILS)
SYSTEM NO. I
INITIALLY I S M FT. FLY-BY
AFTER 10 SECONDS 2000 FT. FLY-RY
00
40
0
- 40
TIME (SEC)
FIGURE 5 -S A DUAL- MODEL TRACKING DISCONTINUOUS TARGET
155

f ItA
Oft
(MIL
S)
IYI1KM MO. B
INITIALLY i A FTg* U SECONDS 2340 FT. FLY-BY
SO
40
40
flftU R E M l DUAL-MODEL T S A C K lM DISCONTINUOUS TARGET 9ST

157
t h e o p e r a t o r h a d a te n d e n c y t o o v e r s h o o t t h e t a r g e t l i k e t h e
a I n g le - m o d e m o d e l p r e d i c t e d . H o w ev er, t h e r e w e re soma c a s e s
w h e re t h e hum an o p e r a t o r se em e d t o u s e a l e a d s t r a t e g y a n d
p e r f o r m e d i n a m an n e r s i m i l a r t o t h e a c q u i s i t i o n m o d e . I t
s h o u ld a l s o b e n o t e d t h a t t h e h y b r i d t r a c k i n g d a t a w as som ew hat
b i a s e d n e a r c r o s s o v e r b y t h e way t h e o p e r a t o r c o n t r o l l e d t h e
g u n . T he o p e r a t o r c o n t r o l l e d t h e h y b r i d gun by a p p ly in g
to r q u e w i t h a h a n d s e t p o t e n t i m e t e r . He h a d t o r e t u r n i t t o
t h e z e r o p o s i t i o n i n o r d e r t o t a k e a d v a n ta g e o f d a m p in g ,
w h e re an a c t u a l o p e r a t o r o n l y h a d t o s t o p a p p ly in g f o r c e t o
t h e g u n .
F i n a l l y , F i g u r e s 61 a n d 62 w e re i n c l u d e d t o i n d i c a t e how
t h e d u a l-m o d e m o d e l p e r f o r m s w hen t r a c k i n g a d i s c o n t i n u o u s
s i g n a l . S u ch d i s c o n t i n u i t i e s c a n o c c u r w hen t h e t a r g e t i s
h id d e n b y c l o u d s , t r e e s , e t c . , o r w hen t h e o p e r a t o r ' s a t t e n
t i o n s p a n i s i n t e r r u p t e d b y o t h e r s t i m u l i . T h e s e f i g u r e s
i n d i c a t e t h a t t h e m o d e l c a n e f f e c t i v e l y t r a c k a d i s c o n t i n u o u s
t a r g e t .
5 . 6 . The D i g i t a l S i m u l a t i o n . A l i s t i n g o f t h e d i g i t a l
s i m u l a t i o n s o f t h e t r a c k i n g s y s te m u s e d i n t h i s s tu d y i s g iv e n
i n A p p e n d ix H . T he s i m u l a t i o n i s m o d u la r i n n a t u r e a n d u s e s
4 t h o r d e r R u n g a -K u tta t o s o l v e a s e t o f s im u l t a n e o u s d i f f e r e n
t i a l e q u a t i o n s . A f lo w c h a r t o f t h e p ro g ra m i s g iv e n i n
F ig u r e 6 3 .

1 5 8
The fo llow in g i s • fu n ction a l d escr ip tion o f each o f
the subroutines used in the sim u la tion s.
MAIM PROGRAM - used to s e t up date for the ease to be run,
c a l l the equation s o lv e r , and c a l l the p lo t rou tin e .
RUNG A - Master schedule fo r the so lu tio n o f the s e t o f sim ul
taneous d if f e r e n t ia l equations.
DERIV - c a lle d by Runga. C alcu lates i n i t i a l con d ition s,
eva lu ates interm ediate va lu es, and term inates the so lu
t io n o f the s e t o f simultaneous d if fe r e n t ia l equations
d escrib in g the tracking system .
IODATA - output subroutine which i s c a lle d by Runga.
TARGET - used to en ter fli< £ it path data and c a lcu la te the
p o s it io n o f the plane as a function o f tim e.
AOQUIR - used to compute the sw itch ing times for the a cq u is i
t io n mode.
DELAY - s e ts up, s to r e s , and r e tr ie v e s values from the torque
h isto ry ta b le s . I t a lso contains the lead m odification
used by the acquire mode.
WMODB - used to determine which operator mode to be used,
c a lle d by DERIV.
ROTATE - used to perform the coordinate transform ation needed
to eva lu ate alignment erro r .

P L O T MA I N l— 1 R U N G A IODATAP ROGRAM
EVAL
R OT AT E DE R I V
A C Q U I R
T A R G E T
V I L
FIGURE 5 - « S F L O W CHART O F D I G I T A L S I M U L A T I O N 159

160
VEL - u s e d t o c a l c u l a t e t h e a n g u l a r v e l o c i t y o f t h e a i r c r a f t .
EVAL - u s e d t o e a l o u l a t e t h e a im e r r o r w h ic h i s f e d b a c k t o
t h e o p e r a t o r .
PLOT - l i n e - p r i n t e r r o u t i n e s c a l l e d by MAIN PROGRAM.

CHAPTER VI
EXAMINATION OF RESULTS AND CONCLUSIONS
6 . 1 . E x a m in a t io n o f R e s u l t s . R e v ie w in g t h e d a t a show s
t h a t t h e i n i t i a l o b j e c t i v e , t h e d e v e lo p m e n t o f a m odel o f a
w e l l t r a i n e d o p e r a t o r , h a s b e e n e s t a b l i s h e d . The f i g u r e s i n
S e c t i o n 5 .3 show a t a g l a n c e how w e l l t h e hum an o p e r a t o r m odel
u s e d i n c o n j u n c t i n w i th d i f f e r e n t n o n - l i n e a r a im in g d e v ic e s
a g r e e s w i t h e x p e r i m e n t a l d a t a . A ls o i t i s i m p o r t a n t t o p o i n t
o u t t h a t t h e hum an m odel p a r a m e t e r s u s e d t o p r e p a r e t h e s e
r e s u l t s a r e b a s e d on d a t a o b t a i n e d f ro m v e r y d i f f e r e n t t a r g e t
t r a j e c t o r i e s . T h is l e a d s o n e t o h a v e a g r e a t d e a l o f c o n f i
d e n c e i n t h e a b i l i t y o f t h i s m o d e l t o p r e d i c t t h e t r a c k i n g
e r r o r s f o r a lm o s t a n y f l i g h t m a n e u v e r .»
The d i f f i c u l t i e s e n c o u n te r e d e a r l y i n t h e s t u d y w i th
l i n e a i r c o n t in u o u s m o d e ls a n d t h e f i n a l r e s u l t s o b t a i n e d w i th
t h e d u a l - m o d a l m odel c l e a r l y p o i n t o u t t h e s u p e r i o r i t y o f
t h e new o p e r a t o r m o d el t o t h e c o n t in u o u s m o d e l . Due t o i t s
s t a b i l i t y , S e c t i o n 3 - 6 , a n d i t s a b i l i t y t o p r e d i c t t r a c k i n g
e r r o r s f o r v e r y d i f f e r e n t t a r g e t t r a j e c t o r i e s , t h e d u a l-m o d a l
m o d el a l s o show s p ro m is e o f s u p e r i o r i t y t o s t o c a s t i c m o d e ls .
A l th o u g h s t o c a s t i c m o d e ls p r o v id e good r e s u l t s , t h e y c a n n o t b e
u s e d t o t r a c k t a r g e t s w i th t r a j e c t o r i e s t h a t d e v i a t e v e r y much
f ro m t h o s e u s e d t o d e v e lo p t h e i r p a r a m e t e r s .
161
162
6 . 2 . C onclusions . T he r e s u l t s show d e a r l y t h s t t h e
d u a l-m o d a l m o d e l d o e s an e x c e l l e n t j o b o f p r e d i c t i n g m ean
t r a c k i n g e r r o r s f o r t h e s y s te m s t u d i e d . I t i s a l s o d e a r l y
s u p e r i o r t o t h e c o n t in u o u s m o d e l i n c h a r a c t e r i s i n g an o p e r a t o r ' s
r e s p o n s e s . I t s h o u ld a l s o b e n o t e d t h a t e v e n th o u g h t h e o p e r a
t o r m odel d e v e lo p e d i n t h i s p a p e r d o e s a n e x c e l l e n t jo b o v e r a
w id e r a n g e o f t a r g e t s , t h e f a c t t h a t t h e hum an o p e r a t o r a c t s
a s a v e r y a d a p t i v e c o n t r o l l e r a n d t h e f a c t t h a t t h e o p e r a t o r
m odel h a s b e e n d e s ig n e d c l o s e l y a ro u n d a p a r t i c u l a r a p p l i c a
t i o n i n d i c a t e s t h a t i t i s u n l i k e l y t h a t a u n i v e r s a l hum an
o p e r a t o r m o d e l w i l l b e d e v e lo p e d . I n s t e a d , u s e f u l o p e r a t o r
m o d e ls w i l l c o n t i n u e t o b e c l o s e l y t i e d t o t h e d e v ic e b e in g
c o n t r o l l e d .
F i n a l l y , t h i s r e s e a r c h s u p p o r t s t h e g ro w in g l i s t o f
u s e s f o r g e n e r a l p u r p o s e h y b r i d c o m p u ta t io n . W ith a l i t t l e
i n v e n t i v e n e s s i n t h a a r e a o f v i s u a l d i s p l a y s a n d i n p u t d e v i c e s ,
t h e h y b r i d c o m p u te r b eco m es a n in e x p e n s i v e a n d u s e f u l t o o l i n
t h e d e s ig n o f e x p e r i m e n t s , o p e r a t o r t r a i n i n g an d hum an f a c t o r s
s t u d i e s . As i n t h i s p r o j e c t , t h e h y b r i d c o m p u te r c a n b e u s e d
t o p r o v i d e u s e f u l d a t a a n d t o r e d u c e t h e num ber o f e x p e n s iv e
a n d so m e tim e s u s e l e s s e x p e r im e n t s n e e d e d t o d e v e lo p human
o p e r a t o r p a r a m e t e r s .

BIBLIOGRAPHY

BIBLIOGRAPHY
1 . M cC orm ick, E . J . Human F a c to r * E n g i n e e r i n g . 2nd e d .New Y o rk : M e G ra w - i i i i i , i n c . " 1 9 "U . p p . 2 4 8 -2 5 0 .
2 . F i e l d i n g , W. F . "Some C h a r a c t e r i s t i c s o f t h e HumanO p e r a to r a n d h i s M a th e m a t ic a l R e p r e s e n t a t i o n i n t h e T r a c k in g R o l e , " Royal Aircraft E s t a b l i s h m e n t , T e c h n ic a l R e p o r t N o. WE 3 8 . F a r e n n r o u g h , f c n g lin (A u g u s t , 1 9 8 3 ) .
3 . H ic k s , W. E . "Man a s a n E le m e n t i n a C o n t r o l S y s te m ,"M e d ic a l R e s e a r c h C o u n c i l , A p p l i e d P s y c h o lo g y U n i t ,APU 1 5 0 /5 1 , ( 1 9 5 1 ) .
4 . D r e y f u s s , H e n ry . T he M e a su re o f M an. New Y o rk : W h itn e yL i b r a r y o f D e s ig n s , 1 9 6 7 . p . i< t.
5 . M o rg an , C. T . , e t a l . Human E n g in e e r i n g G u id e t o E q u ip m en t D e s ig n . Nfew Y o rk : r f c G r a w - r t i l l . i n c . , 1 9 5 3 . p .- g'5 6 .
6 . F o g e l , L . J . B io te c h n o lo g y : C o n c e p ts a n d A p p l i c a t i o n s .E n g lew o o d C l i r r s , Mew J e r s e y : P r e n t i s s - f l a i l , I n c . ,1 9 6 3 . p . 2 4 3 .
7 . N a d l e r , G . , a n d J . G o ldm an . "T he U n o p a r ," T he J o u r n a lo f I n d u s t r i a l E n g i n e e r i n g » V o l . 9 , 1 9 5 8 . p p . s d - 6 5 .
8 . N a d l e r , G. a n d J . G o ldm an . " O p e r a to r P e r fo rm a n c eS t u d i e s : I , One P la n e M o tio n L e a r n in g , n T he J o u r n a lo f I n d u s t r i a l E n g i n e e r i n g , V 61. 9 , 1 9 5 8 . p p t i t l ? - i 9 7 .
9 . N a d l e r , G. a n d J . G oldm an. " O p e r a t o r P e r fo rm a n c eS t u d i e s : I I , L e a r n in g A n a l y s i s f o r T h re e P l a n e M o t io n s ,"The J o u r n a l o f I n d u s t r i a l E n g i n e e r i n g , V o l. 9 , 196 3 .
1 0 . C o s t e l l o , R . J . A M odel o f t h e W e ll T r a in e d Human O p e ra t o r : As a n E le m e n t i n an A u to m a t ic c o n t r o l s y s te m .P h .D . d i s s e r t a t i o n , M a d iso n , W is c o n s in : U n i v e r s i t y o fW is c o n s in , 1 9 6 6 . p p . 3 4 -4 2 .
164

165
1 1 . Young, L . R . and L . Stark. "Variable Feedback Experiment*T eeting a Sampled Data MBdel fo r E ye Tracking Movements," IEEE Transactions on Human Factors in E le c tr o n ic s , Vol. h f e U , No . 1 , September, 1963. pp. 38-51.
1 2 . M a n fre d , C. a n d J . H . M ilsu m . B i o a e d io a l E n g in e e r in gS y s te m s . New Y o rk : M c G ra w -H ill', I n c . " " 1 9 7 0 . p p . 1 - 2 0 .
1 3 . M cC orm iok, o p . c i t . . p p . 3 3 2 -3 4 3 .
1 4 . I b i d . , p p . 3 3 4 -3 3 5 .
1 5 . I b i d . , p p . 3 3 8 -3 3 9 .
1 6 . M cC orm ick , E . J . Human E n g i n e e r i n g . 1 s t e d . New Y o rk :M c G ra w -H ill, I n c . , 1 9 5 7 . p . 3b77
1 7 . D r e y f u s s , o p . c i t . , p . 8 .
1 8 . T u s t i n , A . "The N a tu r e o f t h e O p e r a t o r 's R e sp o n se i nM anual C o n t r b l a n d i t s I m p l i c a t i o n f o r C o n t r o l D e s ig n ," J o u r n a l o f t h e 1 i n s t i t u t i o n o f E l e c t r i c a l E n g in e e r s ,Vol. 94, Far* II-A, No. 2, 1947.-----------*------
1 9 . M cR uer, D. e t a l . "Human P i l o t D ynam ics i n C o m p e n sa to ryS y s te m s ," A i r F o rc e F l i g h t D ynam ics L a b o r a t o r y , W r i g h t - P a t t e r s o n A i r F o r c e B a s e , O h io , T e c h n ic a l R e p o r t N o. A FFD L -T R -65-1S , J u l y , 1 9 6 5 .
2 0 . B e k e y , G. A . " A d a p tiv e C o n t r o l S y s te m M o d e ls o f t h eHuman O p e r a t o r . " I n A d a p t iv e C o n t r o l S y s te m s , p p . 2 0 3 -2 1 9 , E d . b y F . P . C a r u th e r s a n d ft. L e v e n s t e i n ,New Y o rk , New Y o rk , T he M a c m illa n C om pany, 1 9 6 3 .
2 1 . I b i d . , p . 2 0 8 .
2 2 . E l k i n d , J . . I . " C h a r a c t e r i s t i c s o f S im p le M anual C o n t r o lS y s te m s ," M .I .T . L in c o ln L a b o r a to r y T e c h n ic a l R e p o r t N o . I l l , A p r i l , 1 9 5 6 .
2 3 . B e k e y , G. A . "T he Human O p e r a t o r a s a S a m p le -D a taS y s te m ," IRE T r a n s a c t i o n s Human F a c t o r s i n E l e c t r o n i c s , H F E -3 , S e p te m b e r , 1 9 6 2 . p p . 4 3 - 5 1 .
2 4 . B e k e y , " A d a p tiv e C o n t r o l , " o p . c i t . , p p . 2 0 9 -2 1 9 ,
2 5 . B e k e y , G. A . a n d C . B. N e a l . " I d e n t i f i c a t i o n o f S a m p lin gI n t e r v a l s i n S a m p le d -D a ta M o d e ls o f Human O p e r a t o r s , "IEEE T r a n s a c t i o n s o n M an-M ach ine S y s te m s , V o l . MMS-9,No. 4, December, 1966.
166
2 6 . Y oung , L . R . "On A d a p t iv e M anual C o n t r o l , " A u to m a tio na n d R em ote C o n t r o l , J u n e , 1 9 6 8 . p p . 2 9 2 -8 3 1 .
2 7 . W e r tz , H . J . " A d a p t iv e C o n t r o l o f S y s te m s C o n ta in in gt h e Human O p e r a t o r , " P h .D . D i s s e r t a t i o n , U n i v e r s i t y o f W is c o n s in , M a d iso n , W is o o n s ln , 1 9 6 2 .
2 8 . F o g e l , o p . c i t . , p p . 2 4 1 -2 4 5 .
2 9 . C o s t e l l o , R . 6 . "T he S u rg e M odel o f t h e W e ll T r a in e dHuman O p e r a t o r i n S im p le M an u al C o n t r o l , " IEEE T r a n s a c t i o n s o n M an-M achine S y s te m s , V o l . MMS-9, N o. 1 , M a rch , 1 9 6 9 . p p . 2 - 9 .
3 0 . C o s t e l l o , " D i s s e r t a t i o n , " o p . c i t . , p p . 3 5 -3 7 .
3 1 . P l a n c h a r d , J . A . a n d T . M. P e r k i n s . "D e v e lo p m e n t o f aHuman O p e r a t o r M odel f o r a T r a c k in g T a s k ," A i r F o rc e A rm am ent L a b o r a t o r y , E g l i n A i r F o r c e B a s e , F l o r i d a , T R -7 1 -2 0 , V o l. I l l , F e b r u a r y , 1 9 7 1 .
3 2 . C o s t e l l o , " IE E E ," o p . c i t . , p p . 9 - 1 7 .
3 3 . P l a n c h a r d , J . A . , T . M. P e r k i n s a n d J . B a r z i n l i ." D e te r m in a t io n o f T r a c k in g E r r o r s i n a n A n t i A i r c r a f t E n v i r o n m e n t ," A i r F o r c e A rm am ent L a b o r a t o r y , E g l i n A i r F o rc e B a s e , F l o r i d a , T e c h n ic a l R e p o r t , J u n e , 1 9 7 2 . p p . 4 2 - 5 5 .
3 4 . C o s t e l l o , " D i s s e r t a t i o n , " o p . c i t .
3 5 . P o w e l l , M. J . D. "An E f f i c i e n t M ethod f o r F in d in g t h eMinimum o f a F u n c t io n o f S e v e r a l V a r i a b l e s W ith o u t C a l c u l a t i n g D e r i v a t i v e s , " C o m p u te r J o u r n a l , V o l . 7 . p . 1 5 5 . -------------------------------
3 6 . P l a n c h a r d , J . , T . P e r k i n s a n d J . B a r z i n j i . "A R e s e a r c ha n d A n a l y s i s P ro g ra m o f S t u d i e s o n t h e A n a l y s i s o f W eapon E f f e c t i v e n e s s - P h a s e I I R e s u l t s , Volum e I I I , D e v e lo p m e n t o f a Two-Mode Human O p e r a t o r f o r a T r a c k in g T a s k ," AFATL, E g l i n A i r F o rc e B a s e , F l o r i d a , T R -1 1 0 , V o l. I l l , A u g u s t , 1 9 7 1 .
3 8 . B re w e r , J o h n . C la s s n o t e s p r e p a r e d f o r E n g in e e r in gG r a p h ic s 154 (C o m p u te r G r a p h i c s ) . F a l l , 1 9 7 1 .

APPENDICES

APPENDIX A
CALCULATION OF ALIGNMENT ERROR
A - l . D e v e lo p m e n t o f C o o r d in a te R o t a t i o n E q u a t io n
The e q u a t i o n s t h a t r e l a t e s a p o i n t i n t h e i n e r t i a l
c o o r d i n a t e s y s te m t o i t s c o r r e s p o n d in g p o s i t i o n i n t h e gun
c o o r d i n a t e s y s te m a r e d e v e lo p e d b e lo w . F i r s t r o t a t e t h e
i n e r t i a l c o o r d i n a t e s y s te m th r o u g h a n g l e & ( s e e F ig u r e A - l a ) .
Xg Cos e S i n ^ 0 x i
* 8= - S i n e Cos 9 0 y i ( A - l )
Zg 0 0 z1
T hen r o t a t e t h e t r a n s f o r m e d i n e r t i a l c o o r d i n a t e s y s te m th r o u g h
a n g le ( s e e F ig u r e A - l b ) .
y i
7I
Co 8 0 - S i n 0
0 1 0
S i n 0 0 C o s0
X
Y
Z
(A -2 )
By c o m b in in g th e a b o v e r e l a t i o n s h i p s , a p o i n t i n t h e gun
c o o r d i n a t e s y s te m c a n b e c a l c u l a t e d , g iv e n t h e i n e r t i a l c o o r
d i n a t e a n d t h e a n g l e s £ a n d 0 . T h is c o m b in e d t r a n s f o r m a t i o n
i s
168

169
Z. * ' Y'
X
(a) rotation through angla
(b) rotation through angle
Figure A -l Rotation o f In e r t ia l Coordinate'a System through Anglte $ end Q

170
g
o r
C o s # O - S i n ^ C o s # S i n # 0
0 1 0 - S i n # C o * # 0
Sln^ 0 Cos^ 0 0 1
(A -3)
X9
y~9
Z9
( c o a ^ • C o s # ) ( c o s # • S i n # ) - S i n ^
- S i n # C o s #
( S i n ^ , G o s s ) ( S i n # • S i n # ) C o * #
(A -4)
X
y
z
Xy
z
i

APPENDIX B
PERSPECTIVE PROJECTION
T he p ro g ra m u s e d t o d raw t h e p e r s p e c t i v e p r o j e c t i o n s
o f t h e a i r c r a f t f l i g h t p a t h s i s d o c u m e n te d i n t h i s s e c t i o n .
G e tam ,38 a p a c k a g e o f F o r t r a n s u b r o u t i n e s f o r t h e g e n e r a
t i o n , m a n i p u l a t i o n an d d i s p l a y o f g r a p h i c d a t a , fo rm s th e
h e a r t o f t h i s p ro g ra m .
B a s c i a l l y , t h e p ro g ra m t a k e s i n d a t a p o i n t s fro m a c u rv e
i n 3 - s p a c e , p l a c e s th e m i n t o a (>f x N) m a t r i x , t h e n t r a n s
fo rm s t h e d a t a p o i n t s i n t o a tw o - d im e n s io n a l p r o j e c t i o n
p l a n e . The t r a n s f o r m a t i o n i s c a r r i e d o u t b y m u l t i p l y i n g t h e
d a t a m a t r i x b y a t r a n s f o r m a t i o n m a t r i x T , w h ic h i s g e n e r a t e d
f ro m t h e l o c a t i o n o f t h e o b s e r v a t i o n p o i n t an d t h e p r o j e c t i o n
p l a n e . Once t h e p o i n t s on t h e c u rv e a r e t r a n s l a t e d i n t o t h e
p r o j e c t i o n p l a n e t h e y a r e s c a l e d t o f i t i n t o a p r e d e te r m in e d
w indow . I n a d d i t i o n t o t h e d a t a m a t r i x , a p l o t t e r p e n c o n
t r o l a r r a y i s c o n s t r u c t e d . The f i n a l p l o t i s d raw n b y u s in g
t h e C alcom p r o u t i n e p l o t . T he p l o t t e r i s m oved fro m d a t a
p o i n t t o d a t a p o i n t i n s t r a i g h t l i n e in c r e m e n t s w i th t h e p en
c o n t r o l a r r a y d e te r m in in g w h e th e r t h e p l o t t e r p e n i s down a n d
171

172
w r i t i n g o r u p . T he c o m p u te r p ro g ra m l a H a t e d i n A p p e n d ix C.
A f lo w d ia g ra m o f t h e p e r a p e c t i v e p r o j e c t i o n p ro g ra m
i a g iv e n i n F ig u r e B - l . The f o l lo w in g c o n t a i n s a b r i e f d e e -
c r i p t i o n o f eome o f t h e a u b r o u t i n e a u s e d .
S u b r o u t in e VALUE: T h is r o u t i n e r e a d a f ro m c a r d a t h e maximum
" v ie w in g w indow " s i z e , a x i a p a r a m e t e r s , a n d t h e d a t a p o i n t s
fro m t h e c u rv e t o b e p l o t t e d . Then i t s e t s up th e d raw
m a t r i x , DR1, t o i n c l u d e t h e a x e s , w i t h t i c m ark s a n d th e
c u r v e . F i n a l l y t h e l o c a t i o n o f t h e o b s e r v a t i o n p o i n t i s
c a l c u l a t e d i n s u b r o u t i n e VALUE.
S u b r o u t in e TRANSL; T h is r o u t i n e d e f i n e s t h e t r a n s f o r m a t i o n
m a t r ix T w h ic h w i l l b e u s e d t o c a u s e t r a n s l a t i o n i n a n y o r
a l l o f t h e 3 p r i n c i p a l d i r e c t i o n s .
S u b r o u t in e PROJ 1 : T h is i s t h e i n i t i a l s t e p i n f o rm in g a
p e r s p e c t i v e p r o j e c t i o n o f a n a r r a y . T h is s u b r o u t i n e d e f i n e s
t h e p r o j e c t i o n m a t r i x T w h ic h w i l l b e u s e d w i th TRANSF a n d
PROJ 2 t o c a u s e p e r s p e c t i v e p r o j e c t i o n i n t o t h e 1 , 2 p l a n e .
S u b r o u t in e TRANSF: T h is r o u t i n e p e r f o r m s t h e t r a n s f o r m a t i o n
d e f i n e d b y s u b r o u t i n e s TRANSL a n d PROJ 1 .
S u b r o u t in e PROJ 2 ; T h is r o u t i n e p e r f o r m s t h e f i n a l s t e p i n
p e r s p e c t i v e p r o j e c t i o n . I t " b a c k - p r o j e e t s " t h e H-D o r d i n a r y
c o o r d i n a t e s fo rm e d by c a l l i n g PROJ 1 a n d TRANSF i n t o th e
p i c t u r e p l a n e .

r BEGIN ^
I —
CALL VALUE
CALL TIANBL
CALL PftOJl
CALL TRAHF
fcg-— — i i
CALL PBOJ 2
CALL SCALE
/ \I PLOT CURVE 1
Figure B -l Projection Frograa Flow Chert

17H
S u b r o u t in e SCALE: T h is s u b r o u t i n e s c a l e s t h e 2 - d im e n s io n a l
d raw a r r a y s o t h a t I t w i l l f i t i n t o t h e " v ie w in g w in d o w .”
S u b r o u t in e PLOT: A C aloom p s u b r o u t i n e t h a t m oves t h e p l o t t e r
p e n fro m p o i n t 1 t o p o i n t 2 w i th a p e n c o n t r o l p a r a m e te r
d e te r m i n i n g w h e th e r t h e p e n i s down a n d w r i t i n g o r u p .
A 8 a m p le s e t o f t h e d a t a c a r d s i s g iv e n i n A p p e n d ix C.
The f o l lo w in g f i g u r e s a r e e x a m p le s o f f l i g h t p a t h s n o t show n
i n S e c t i o n 3 . 5 .

500
1000
100
F n ja ctlo n onto X-Y PlMK 1000
Figure B -2 Perspective Projection o f F light Path Ho. 101
175

500
-X 1000
100‘-
1000
2000*
X « 3000Pcojeeckn onto X-Y Plane
Figure B-3 Perspective Projection o f F lig i t Path Ho. 103
17«

10000
5000
20001000
2000Projection onto X-Y Plane
Figure B*4 Perspective Projection of F light Path No. 2
177

10000 '
5000' -
-X1000' --Y
2000 'P ro jec tio n onto X-Y Plane
Figure B-5 Perspective Projection of F light Path No. 3
178

T Z
10000
5000
1000
Projection onto X-Y Plane
Figure B-6 Perspective Projection of F light Path Mo. 4

10000
50001 -X
4000'
• 20001
2000Projection ontoX-T Plane
Figure B~7 Perspective Projection of F ligh t Path Ho. 6

10000
5000
-4000
2000
X * 2000'P ro je c tio n onto X-T Plane
Figure B-8 Perspective Projection of F light Path No. 7

10000 '
5000*
2000*
-Y
2000Projection onto X-Y Plane
Figure B-9 Perspective Projection of F light Path Ho. 8
182

10000'
5000
/ T:
Projection onto X-Y Plane
Figure B“10 Perspective Projection of Flight Path Ho. 9
183

APPENDIX C
COMPUTER LISTING OF PERSPECTIVE
PROJECTION PROGRAM

/ / J O B O l JOB ( 1 0 0 ' 1 3 0 3 ' S V1 0 ) ' *40197 PERKINS**MS6LEVEL«1 / / S T E P I EXEC FORTGCLG«REGION«GO*10QK'TIM£*5 //FORT*SYSIN DO «
DIMENSION DRI( 9 0 0 « 4 l ' 1 C 1 ( 5 0 0 ) 'B U F F I10001 COMMON /B/MESS/C/XMIN'XMAX'YMIN'TMAX'ZMIN'ZMAX COMMON /PARM/1AXES16)*YTRAN. I T I C ( 3 ) . WINDOM( 2 )MESS * 1N1DIM * 500CALL PLOTS(BUFF'IQOO)
CC READ DATA' GENERATE AXES AND PEN CONTROLSC
CALL V A L U E (D R l ' IC l 'N l 'N lD IM )CC MOVES OBSERVER POINT PARALLEL TO V AXISC
CALL TRANSL(-YTRAN'-YTRAN*0*>CC CALCULATE DISTANCE FROM PICTURE PLANE TO OBSERVERC
Z I P « -(XMAX-XMtNI/(2**TAN(30*/57*29S7B>>M R IT E I6 '2 2 ) XMAX.XMIN
22 FORMAT(1X'2F10*2)CALL P R O J1 (Z IP )
CC PERFORMS MATRIX TRANSFERMATIONC
CALL TRANSF( DR1 • IC1»N1'N1DIM.DR1• I C 1 , N 1 ' N I O I M ' l ) CALL P R O J 2 (D R l 'N l 'N lD IM )CALL SCALE(DRl 'N l 'NIDIM)DO 100 1 * 1 *N1M R I T E ( 6 ' 2 0 0 ) O R 1 ( I ' l > ' D R 1 ( I ' 2 )
20C FORMAT!1X.2F20*3)100 CALL P L 0 T ( D R l ( l ' l ) ' D R l ( I ' 2 ) ' I C l ( i n

CALL P L O T ! 0 * .0 * *999)STOPEND
BLOCKDATACOMMON/ APT/T<4 . 4 > *TCOM(4 . 4 )DATAT/1 * . 4 * 0 * 0 . 1 * « 4 * 0 * 0 * W . 4 * 0 * 0 . 1 . /DATATCOM/1* . 4 * 0 * • 1 * . 4 * 0 * . 1 • . 4 * 0 * • 1 • /END
SUBROUTINE PROJ1 (E )COMMON/APT/T<4 . 4 ) .TCON < 4 .4 ) /B/MESS IF tM E 5 S * £ 0 * i )M R IT E (6 * 1 IE TC0M<3.3)*0*T C 0M (3*4)*1* /E CALL COMBIF (M E S S*EQ *I)«R ITE <6.2 )RETURN
1 FORMAT ( / / • ENTER P R O J I */ 3 X . 'P O S IT I O N CN NEC* Z AXIS I S * . 1F9*0«* FROM THE X*V PLANE*)
2 FORMAT ( • EXIT PROJI*)ENO
SUBROUTINE PROJ2 IDRN.N.NDIM)DIMENSION DRN (NDtM.4)COMMON/8/MESS IF(MESS*EQ*1) WRITE(6*1>DO 20 1 * 1 «NI F ( D R N ( I .4 ) * L T * * 0 0 1 ) D R N (I* 4 )* * 0 0 1 DO 20 J * 1 . 4
20 O R N I I . J ) * D R N ( I • J ) / D R N ( I *4)IF (M E S S *E O *l)«R IT E I6*2)RETURN
1 FORMAT!//* ENTER PROJ2• )2 FORMAT(* EXIT P R 0 J2 * I
END
186

SUBROUTINE TRANSF(DRt• IC1*Nl*N1D1N*DR2*IC2*N2*N2DIM*KEEP)OIMENSION SU8(4 ) *ORl(N1DIM*4)*DR2tN2DIM*4) • I C 1 ! N1DIM). IC2!N2DIM> COMMON/APT/T( 4 « 4 ) * TCOM( 4 * 4 ) /B/MESS IFIMESS*EQ*I) WRITE( 6 * 1 I N2*N1DO20K*l*NlIC2(K)*IC1<K>0 0 1 0 J * 1 * 4 S U B ! J ) *0*0 0 0 1 0 1 * 1 * 4
10 S U B C J ) * S U B t J ) 4 D R l f K * I ) « T ( I * J )0 0 6 0 L * 1*4
60 DR2fK*t.)*SUB<L)20 CONTINUE
IF!MESS*EQ* 1 )WRITE(6*2)IFIKEEP*EQ*11 6 0 TO SO 0 0 3 0 1 * 1 * 4 D 0 3 0 J* 1 * 4
30 T( I* J 1*0*00 0 4 0 1 * 1 * 4
40 T ( 1 * 1 1*1*IF(MESS*EO*11MRITEC6*31 GO TO 70
50 IF(MESS*EQ*1 ) MR1TEC6*4170 IFfMESS*EO*l) WRITEC6*S)
RETURN1 FORMAT!//* ENTER TRANSF*12 FORMAT(3X*'OBJECT HAS BEEN TRANSFORMED'>3 FORMAT!3X*'TRANSFORMATION MATRIX HAS BEEN RESET TO IDENTITY*)4 FO RMAT!3X* 'TRANSFORMATIO N MATRIX HAS BEEN KEPT FOR R E U S E * )5 FORMAT! • E X I T TR A N S F*)
END

SUBROUTINE TRANSL ( A A . B B . C C )C 0 M M 0 N / A P T / T ( 4 * 4 ) * T C O M ( 4 * 4 l / B / M E S S 1 F C M £ 5 S « E Q « I 1 M R I T E I 6 * I )11*1 1 2 * 2 1 3 * 3T C Q M ( 4 « 1 )*AA T C O M < 4 * 2 )* B B T C 0 M ( 4 . 3 ) = C C CALL COMBI F ( M £ S S » £ Q « 1 ) V R I T E | 6 * 2 ) A A * X 1 * B B * I 2 * C C * I 3 RETURNFORMAT< / / • ENTER TRANSL*)F O R M A T « 3 X . 'D E F I N E D TRANSLATION O F * .
1 3 ( T 2 6 * F 9 « 2 « * INCHES PARALLEL TO THE N O « * * I 2 * * A X I S ' / ) .2 • E X I T TRANSL*)
END
SUBROUTINE COMBCOMMON✓APT/T< 4 • 4 > • TCOMI4 • 4 )DIM ENSIO N S U B « 4 )DO 3 0 K * 1 . 4 OO 1 0 J * 1 * 4 S U B C J ) * C *DO 1 0 1 * 1 * 4S U B t J ) * S U B ( J ) + T ( K * I > * T C O M < I , J >DO 2 0 L * l * 4 T ( K * L ) * S U B C L >CONTINUE DO 4 0 1 * 1 * 4 DO 4 0 .1*1 • 4 T C O M ( I « J ) * 0 *0 0 5 0 1 * 1 * 4 TCOM (1 * 1 1 * 1 *RETURNEND

SUBROUTINE S C A L E ( O R I . N 1 . N 1 D I M )DIMENSION D R M N 1 0 I M . 4 )COMMON / B / M E S S / C / X M 1 N . X M A X . YMIN.YMAX.ZMIN.ZMAX COMMON / P A R M / I A X E S I 6 ) • Y T R A N » I T I C ( 3 ) . W I N D 0 W ( 2 )I F ! M E S S « E Q * I ) W R 1 T E I 6 * 1 0 1 )
101 FORMAT( 1 0 X . *ENTER SUBROUTINE S C A L E * )X M IN*D R1( 1 * 1 >XMAXsXMlN YMIN=DR1 ( 1 . 2 )YMAXsYMIN OO 1 0 0 I * 2 . N l XX * D R U M )YY * 0 R 1 < 1 . 2 )I F ( XX*LT*XMIN) XMIN-XX IF(XX*GT*XMAX) XMAX*XX IF!YY*LT«YM1N) YMIN*YV IF!YY«GT«YMAX) YMAX*YV
100 CONTINUEI F ( MESStEO*I) WRITE( 6 * 1 2 5 ) XMIN.XMAX.YMIN.YMAX
125 FORMAT(5X» *XMIN * • . E l 2 . A . • XMAX * * . E l 2*4* * YMIN ■ * . E 1 2 * 4 .1 *YMAX * * . E 1 2 « 4 )XDIF * XMAX - XMIN YDIF * YMAX - YMIN SFX * WINDOW!11/XDIF SFY a WINDOW!2 l /YOIF IFISFX«L£*SFY) GOTO 200 SF * SFY GOTO 300
200 SF * SFX 300 OO 500 I = 1.N1
OR 1 ( 1 * 1 ) = D R l ( I « t ) * S F S 0 9 O R K I . 2 ) * 0 R 1 ( I . 2 ) * S F
XMIN 3 XMIN • SF YMIN 3 YMIN * S F CALL P L 0 T ( - X M I N . - Y M l N . - 3 )I F ( M E S S . E Q . 1 ) W R I T E ! 6 . 1 0 3 ) ! J . D R 1 C J . I ) . O R I ! J . 2 )* O R l ! J . 3 ) •
189

1 J * 1 * N 1 >103 FORMAT!IX.#L 1ST ORI ARRAY**5X.* Ml • *3X* • OR1(Ml• 1 ) • . 6 X .
1 * O R l |N l « 2 ) * « 6 X * * O R l(N l* 3 1 " *SX*"IC1CN1) " / ! 2 0 X * I 5 * 3 E 1 S « S ) 1 IF<ME5S*EQ*1) VRITE<6*102)
1 0 2 FO RM AT!10X ** E X I T SUBROUTINE S C A L E " 1 RETURN ENO
SUBROUTINE V A L U E C D R 1 * I C 1 * N 1 . N I O I M l DIMENSION D R 1 < N 1 D I M * 4 ) * I C 1 I N 1 D I M )COMMON / B / M E S S / C / X M I N • XMAX *VN1N* YMAX *ZMIN»ZMAX COMMON / P A R M / I A X E S 1 6 1 • V T R A N * I T I C I 3 ) » M I N O O M ( 2 ) I F ! M E S S * E O « I ) V R I T E C 6 * 1 0 1 1
101 FORM AT!1 OX*"ENTER SUBROUTINE VALUE")N l * lI C 1 I N 1 ) * 3R E A D ! 5 * * ) « I N D O « ! l ) * t t l N O O V ! 2 )OO 1 0 1 * 1 * 3
10 R E A D I S * * ) I A X E S ! I ) * I T I C ! 1 )DO 2 0 I * 4 * 6
2 0 R E A D !5 * 4 ) I A X E S I I )1 0 0 R E A D ! 5 * 4 * E N D * 5 0 0 ) O R I ( N 1 * 3 ) * D R 1 ! N 1 * 1 ) * D R 1 I N I * 2 )
1 F ! N 1 « G T « N 1 D I N > GOTO 9 9 8 I F ! N 1 * E 0 * 1 ) GOTO I S O I C 1 I N 1 ) * 2 XX* D R K N 1 . 1 )YY= 0 R 1 ! N 1 * 2 )Z Z * 0 R K N 1 . 3 )I F ( X X * L T « X M I N ) XMIN * XX IF !X X*GT«XM AX) XMAX * XX I F ! YY*LT«YMIN) YMIN * YY IF!YY«GT*YMAX) YMAX * YY
190

150
200
500
501
103
650700750
I F ( Z Z * L . T * 2 M I N ) ZMIN * ZZIF(ZZ«GT«ZMAX) ZNAX « ZZGOTO 2 0 0XMIN * O R I ( N 1 • 1 1XMAX x XMINYMIN * O R K N 1 . 2 )YMAX * YMIN ZMIN x D R H N 1 . 3 )ZMAX * ZMIN N1 a N1 ♦ 1 GO TO 1 0 0 NSTOP * N1 - 1 NN x 2*N S T O P N * N10 0 5 0 1 N 1 x N .N N I C l f N l ) x I C 1 I N I —N S T O P 1 OR 1 ( N l • 1 ) x D R M N 1 - N S T 0 P . 1 )O R K N 1 . 2 ) x 0«D R K N 1 . 3 ) x ORI ( N l - N S T O P * 3 1 N l x NN ♦ II F ( M E S S *E Q «11 I I R I T E ( 6 , 1 0 3 > t J . D R I C J , n , D R i ( J , 2 ) . D R 1 C J , 3 > . I C I ( J > ,
1 J = 1 . N S T O P )FORMAT( I X , ' L I S T OR I A R R A Y * , 5 X , * N l • , 3 X , * D R 1 ( N l • 1 ) • , 6 X ,
1 * D R 1 ( N 1 , 2 ) * . 6 X , * 0 R 1 ( N I , 3 ) * , 5 X . * I C 1 ( N 1 ) • / ( 2 0 X , I 5 , 3 £ 1 5 * 5 » 1 1 0 1 ) D R 1 ( N 1 , 1 ) = 0 *D R K N l , 2 ) x 0 »D R 1 ( N 1 , 3 ) » 0 .I C 1 ( N l ) * 3 XD1F x XMAX - X M IN Y O IF x YMAX - YMIN Z D I F x ZMAX - ZMINT I C L x A M A X 1 ( X D I F , V O I F , Z D l F ) * 0 * 0 1 I F ( I A X E S f 1 ) « E O « 1 ) GOTO 1 0 0 0 I F I I A X E S ( 2 ) « E Q « 1 ) GOTO 2 0 0 0 I F ( I A X E S ( 3 ) * E Q « 11 GOTO 3 0 0 0 I F I I A X E S C 4 ) * £ Q * 1 ) GOTO 4 0 0 0
191

800 I F ( IAXESf 5 1*EQ»1> GOTO 5000 850 I F ( I AXES( 6 )«EQ«1) GOTO 6 0 0 0
GOTO 9600 1003 IF ( XMAX«LE«0*)GOTO 650
XLEN * 0*1100 Nl * Nl ♦ 1
1F(N1*GT«N1DIM) GOTO 998 XLEN = XLEN ♦ ITICC 1) O R l ( N l . l ) * XLEN DR 1 ( N1 • 2 ) > 0*O R K N 1 .3 ) a 0*IC1CN1) = 2 Nl > Nl ♦ IOR 1I N I • 1 ) > ORI(Nl —1*11 DR1CN1*2) * 0*D R K N 1 .3 ) a —TICL 1C1CN11 = 2 Nl * N l ♦ 1 DR1(N1«1>3DR1(N1-1«1>OR1CN1«2 >3 0*O R I ( N l * 3 ) 3 0*IC1(N1>* 3IF(XLEN«LT*XMAX> GOTO1100 Nl * Nl -f 1 D R M N 1 .1 )= 0 *O R l(N l ,2 > x O *ORI (N l *3 >3Q«I C K N l > 33 GOTO 650
2000 IF lY MAX.LE*^ I GO TO 700 YLEN 3 0*
1200 Nl 3N1+ 1IF(N1«GT*N1DIM> GOTO 998 YLEN 3 YLEN ♦ IT IC (2> D R l ( N l . l ) 3 0*O R 1IN 1 .2 ) x YLEN
toK)

D R U N 1 . 3 ) * 0*I C 1 ( N l ) * Z
N l *N1 +1D R 1 ( N 1 , 1 ) * - T I C LOR 1 ( N 1 * 2 ) * OR 1 ( N l — 1 *2 1D R K N 1 . 3 ) x C .I C 1 ( N l 1 s 2 Nl *N1 +1 0 R 1 (N 1 * 1 )« 0*D R K N 1 . 2 ) * O R I ( N l —1 * 2 )OR 1 (N l *9 ) a* 0*I C K N l ) = 3I F ( YLEN«LT«YMAX) GOTO 1200 Nl * Nl ♦ I DR1<N1'1>*0»O R l( N l .2 ) x O *DR1(N1«3)»0*I C K N l 1*3 GOTO TOO
3000 1F(ZMAX*LE«0«) GOTO 7 5 0 ZLEN » 0»
1300 Nl * Nl ♦ 1IF (N U G T .N ID IM ) GOTO 998 ZLEN * ZLEN ♦ ITICC3)O R I ( N l • 1 1 x 0*0 R 1 ( N 1 « 2 > * 0 *D R K N 1 . 3 ) * ZLEN I C l ( N l ) = 2 N 1*N 1 ♦ 1 OR 1( N 1 • 1 ) = T IC L OR K N 1 »2 ) * 0 .OR 1 ( N 1 • 3 ) * O R I ( N l - t * 3 ) I C K N l ) x 2 N l s N l H OR 1 ( N1 , 1 ) s 0*OR 1 ( N 1 * 2 ) s 0«
to

OR 1 ( N1 • 3 ) = D R K N l - 1 , 3 ) I C l ( N l ) = 3IF(ZLEN«LT«ZMAX) GOTO 1300 Nl * Nl + 1 DR1 ( N l • 1 ) * 0 *OR 1( N l * 2 ) 3 0«DRKN1«3>»0*I C K N l )=3 GOTO 75C
4000 IF<XMIN.GE*0*» GOTO 800 XLEN * 0*
1400 Nl * Nl + 1IF (N U G T .N ID IM ) GOTO 9 9 6 XLEN * XLEN - I T l C ( l )O R I ( N l *1) * XLEN 0 R K N 1 . 2 ) * 0 'O R K N 1 .3 ) » 0*I C K N l 1* 2Nl s Nl 4 1DR1( N l • 1 )*DR1(N1—1*1)O R I ( N l * 2 ) * 0*DRKN1 . 3 ) = - T I C L I C K N l ) * 2 Nl * Nl ♦ 10 R K N 1 . 1 ) * OR 1 (Nl —1 *1 ) O R K N 1 .2 ) * 0*D R K N 1 .3 ) = 0*I C K N l ) s 3IF<XLEN«GT«XM1N) GOTO 1400 Nl * Nl M 0 R K N 1 .1 )>0*DR1IN1 «2)*0*O R 1 ( N 1 , 3 ) = 0 *I C K N l >=3 GOTO 800
5000 1F(YMIN*GE*0*) GOTO 850
194

YLENsO*1 5 0 0 Nl * N l ♦ 1
! F ( N U G T « N 1 D I M ) GOTO 9 9 6 YLEN * YUEN - I T I C < 2 >Oft K N 1 • 1 ) * 0«Oft1 ( N 1 • 2 ) * YLEN Oft 1 ( N 1• 3 ) * 0«I C K N l ) = 2 N l * N l H D R l ( N l . l ) * -T IC L 0 R 1 I N 1 . 2 ) *D R1 ( N l —1 « 2 I O f t l ( N 1 . 3 ) » 0*I C l ( N l ) * 2 N l « N l 4 |OR K N 1 • 1 ) x 0*DR1(N1*2) * O R I (N l—1*2) O R I ( N l . 3 ) * 0 *I C K N l ) * 3IF(YLEN*GT«YMIN) G 0 T 0 1 5 0 0 N l * N l ♦ 1 D f t 1 ( N 1 » 1 ) * 0*D f t l ( N l » 2 ) x 0*D f t K N1 » 3 ) * 0* l C l ( N l ) = 3 GOTO 6 5 0
6 0 0 0 I F ( Z M I N * G E * 0 ) GOTO 9 0 0 0 ZLEN x 0*
1 6 0 0 Nl * N l 4 1I F ( N I . G T . N I O I M ) GOTO 9 9 8 ZLEN * ZLEN - I T I C ( 3 t D R K N 1 . 1 ) x 0*0 R K N 1 . 2 1 « 0*O R K N 1 .3 1 x ZLEN I C K N l ) x 2 Nl s N l 4 1 D R K N t . l ) x TI CL
MUl

I
0 R 1 1 N 1 . 2 ) = 0*DR l (Nl t3 ) =0R1IN| -1 .3>I C K N l ) * 2 N l * N l U D R I ( N l . l ) * 0 .0 R K N 1 .2 ) = 0*DR1(N1,3) * O R l l N l - 1 . 3 )I C K N l ) * 3I F ( Z L E N « G T « Z M I N ) GOTO 1 6 0 0 N l * N l 4 1 O R K N 1 * 1 ) * 0 *0 R K N 1 . 2 ) * 0 «D R K N 1 . 3 ) » 0*I C K N l ) = 3
9 0 0 0 DO 9 5 0 0 I = 1 >N1 9 5 0 0 O R K U 4 1 * 1 * 0
YTRAN * YMAX ♦ 1 * 5 GOTO 9 9 9
9 9 0 M R 1 T E I 6 . 1 0 4 )MESS * 1
1 0 4 F O R M A T ! I X * * * * * * * * ERROR * * * * « « N l HAS EXCEEDED N 1 D I M * )9 9 9 NSTR s NSTOP ♦ 1
I F ( M E S S * E O « l ) V R I T E I 6 . 1 0 3 M J . D R 1 I J . D . O R 1 ! J . 2 > . D R l f J . 3 ) . I C K J ) • 1J s N S T R # N 1 )
I F ! M E S S * E Q « 1 > M R I T E I 6 * 1 0 2 )1 0 2 F O R M A T ! 1 0 X .« E X I T SUBROUTINE VALUE*)
RETURNEND
196

/ / G O . P D D UNIT=TAPE«LA8EL»(»NU)•VOLsSER»TPLOT //G O ,S Y S IN OO *
9» 6*I 1000 1 500a 500 1 1000 01 500-6 1 1 1 * 4 5 -5 7 4 0 * 9 4 -5 3 7 1 * 0 0 -5 0 0 1 * 3 3 -4 6 3 1 * 9 2 -4 2 6 2 * 7 6 -3 8 9 3 * 8 8 -3 5 2 6 * 0 7 -3 1 6 0 * 7 0 -2 7 9 8 * 2 2 -2 4 3 9 * 2 5 -2 0 8 4 * 5 6 - 1 7 3 4 * 9 3 -1 3 9 1 * 1 0 -1 0 5 4 * 9 5
-7 3 2 * 3 2 - 4 2 6 * 0 2 -1 3 7 * 9 7
1 2 9*99 3 7 6 * 1 7 599*01 79 7 * 1 0
10053*399994*6199 36*049877*5198 1 9 * 0 297 6 0 * 5 69702*0196 3 9 * 3 595 64*4694 74*5293 6 9 * 0 892 5 0 * 7 491 1 7 * 3 689 70*0288 06*828 6 1 9 * 2 08 4 0 6 * 6 46 1 7 0 * 5 37912*417 6 3 3 * 9 57 3 3 6 * 9 77023*39
14 35*7814 67*471 4 99*921532*391564*871597*351 6 2 9 * 9 01 6 63*121692*941710*961715*451 7 0 6 * 3 91683*791 6 4 7 * 6 51599*521549*011 4 98*661448*4713 98*451346*5812 98*671249*32
197

APPENDIX D
THE GUN MODEL
'E L I. D e r i v a t i o n o f S c a l e d Gun E q u a t io n s
A s c a l e d a n a lo g f lo w d ia g ra m o f t h e a z im u th a n g u la r
d i s p l a c e m e n t f o r t h e a n t i - a i r c r a f t gun i s shown i n F ig u r e
D - l , w i t h a l i s t o f t h e g a in f a c t o r s g iv e n i n T a b le D - l .
N o te t h a t t h e g a in f a c t o r s f o r t h e a z im u th m o d el a r e d i f f e r
e n t f ro m t h o s e o f t h e e l e v a t i o n m o d e l, b e c a u s e o f t h e
d i f f e r e n c e s i n l i m i t s p l a c e d on t h e a n g u l a r a c c e l e r a t i o n a n d
t h e a n g u l a r v e l o c i t y . The s c a l i n g e q u a t i o n s a r e a s f o l lo w s :
F o r t h e a z im u th p l a n e :
L im i t Summer #1
# •( D - l )
w h e re l i m i t o n (P = * • 3H907 = t #23271 • 5
(D -2 )
I n t e g r a t o r #2
CD-3)
198

LIM
LSW
Figure D*1 Scaled Gun Model
199

200
TABLE D - l
SCALING TABLE OF THE GUN MODEL (AZIMUTH)
P ro b le m E s t im a te d C o m p u te rV a r ia b l eV a r ia b l e D e s c r i p t i o n Maximum
T Q (t - T ) F o o t p o u n d s 20 -T Q ( t)
tb R a d ia n 3 .1 4 2 t* - T O
* • d > L ± m R a d ia n /s e c o n d 1 .0 6 5 - 0 Lim^ " l.f fB S
0 Lim R a d ia n /s e c o n d 2 1 .5 Lim175”

201I n t e g r a t o r #3
[ T . t k r I s - * 1 5 9 2 ^ - ^ 5 - m31 (D -^ )“cPF
F o r t h e e l e v a t i o n p l a n e :
L im i t Summer #1
2 . 6 87 [ z ^ C t l ] . 2 . 267 [ ^ L i » l (D . 5 )
w h e re l i m i t on & = - * -^ ^ g '7 = " .2 3 2 7 (D -6 )
I n t e g r a t o r #2
d~3F [ 4 m Q = - 1 -1,03f e i E] (D- 7)
I n t e g r a t o r #3
(D -8 )
T he p o t s e t t i n g s f o r a l l t h r e e gun m o d e ls a r e g iv e n i n
T a b le D -3 .
D -2 . D ev e lo p m en t o f L o g ic S i g n a l f o r E l e c t r o n i c S w itc h
The l o g i c s i g n a l , LSW, show n i n F ig u r e D - l an d i n
F ig u r e D-2 i s u s e d t o c o n t r o l t h e i n p u t t o t h e Lim i n t e g r a t o r ,
s o t h a t t h e o u t p u t Lim i® l i m i t e d . I n i t i a l l y , a l i m i t sum m er
was e m p lo y e d i n t h e gun s i m u l a t i o n t o l i m i t L im i n s t e a d o f t h e

LowerLimit
+ ref
LL LSW
-re f
UpperLimit
Figure D-2 C ircuit D lagr« - Generation of the Logic Control Signal (LSW)
202

20 3
TABLE D-2
SCALING TABLE OF THE GUN MODEL (ELEVATION)
P ro b le m E s t im a te d C o m p u te rV a r ia b l e D e s c r i p t i o n Maximum V a r ia b l e
T Q (t - ) F o o t p o u n d s 20 - T 0 ( t )
&
& L im
■ •© L im
R a d ia n
R a d ia n /s e c o n d
2R a d i a n / s e c o n d
3.1H 2
.5
1 .5 &LimITT

e l e c t r o n i c s w i t c h . B u t t h i s a n a l o g m o de l a l l o w e d I n t e g r a t o r
#2 t o d e v e l o p v o l t a g e h i g h e r t h a n t h e d e s i r e d l i m i t e d v a l u e s
A l o g i c c i r c u i t d i a g r a m o f s i g n a l LSW i s shown i n F i g u r e D-2
a l o n g w i t h a d e s c r i p t i o n o f t h e l o g i c v a r i a b l e s u s e d in
T a b l e D-*t. A t r u t h t a b l e f o r t h e s w i t c h i n g s i g n a l c i r c u i t
i s g i v e n i n T a b le D -5 .

205
TABLE D-3
POT SETTINGS FOR THE ANALOG MODEL*
P o t Number AZIMUTH PLANE
S tu d y #1 S tu d y #2 S tu d y #3
1 .2 2 6 7 . 8345 .5 4 0 02 .1 0 6 7 .6290 .3 3 8 03 .3 0 0 0 .3000 .3 0 0 04 .1 5 9 2 .15 92 .1 5 9 2
P o t Number ELEVATION PLANE
S tu d y #1 S tu d y #2 S tu d y #3
1 .2 6 6 7 .4 3 2 0 .8 1 6 02 .2 2 6 7 .5800 .7 0 6 03 .1 4 0 3 .1 4 0 3 .1 4 0 34 . 3390 . 3390 .3390
NOTE T h e s e p o t n u m bers c o r r e s p o n d t o t h e p o t s i n F i g u r e D - l , n o t t o t h e p o t s i n t h e H y b r id s i m u l a t i o n d i a g r a m , F i g u r e 4 - 2 .

206
TABLE D-4
DESCRIPTION OF LOGIC SIGNAL
S i g n a l S t a t e D e s c r i p t i o n
L I 1 u p p e r l i m i t0 Lim u p p e r l i m i t
L2 1 Lj_m l o w e r l i m i t0 ^ im l o w e r l i m i t
L3 1 A n g u l a r a c c e l e r a t i o n n e g a t i v e0 A n g u l a r a c c e l e r a t i o n p o s i t i v e
L4 1 S y s te m m ov ing away from u p p e r l i m i t0 S y s te m a g a i n s t u p p e r l i m i t
L5 1 S y s te m m o v ing away f ro m lo w e r l i m i t0 S y s te m a g a i n s t l o w e r l i m i t
L6 1 S y s te m m ov ing away f ro m l i m i t s0 S y s te m a g a i n s t a l i m i t
L6H H o ld s i g n a l f o r f i x e d am ount o f t im ewhen L6 g o e s h i g h
LL 1 L i m i n s i d e c o n s t r a i n t0 Li.m a c o n s t r a i n t
LSW 1 E l e c t r o n i c s w i t c h c l o s e d0 E l e c t r o n i c s w i t c h o p e n

207
TABLE D-5
TRUTH TABLE FOR LOGIC SWITCHING SIGNAL*
L o g icS t a t e s L o g ic V a i r a b l e L o g ic F u n c t i o n s
L I L2 L3 L4 L5 L6 LL LSW
1 0 0 0 0 1 1 0 1
2 0 0 1 0 0 0 0 0
3 0 1 0 0 0 0 1 1
4 0 1 1 0 0 0 1 1
5 1 0 0 w i l l n o t o c c u rb o t h Lim v i o l a t e d
6 1 0 1
7 1 1 0 0 0 0 0 0
8 1 1 1 1 0 1 0 1
&N o te ( s e e F ig u r e D -2 )

APPENDIX E
PAPER TAPE CONVERSION PROGRAM
The j o b o f r e p r o d u c i n g t h e h y b r i d d a t a on p u n c h e d c a r d s
i s t h e t o p i c o f t h i s a p p e n d i x . S i n c e t h e h y b r i d c o m p u te r
o n l y h a s p a p e r t a p e a n d l i n e p r i n t e r o u t p u t d e v i c e s a n d t h e
U n i v e r s i t y C o m p u te r C e n t e r c a n n o t r e a d p a p e r t a p e , i t becam e
n e c e s s a r y t o u s e an IBM-49 p a p e r t a p e t o c a r d p u n c h f o r t h i s
d a t a t o c a r d p r o b le m . The p ro g ra m t o f o l l o w e n a b l e s t h e
h y b r i d c o m p u te r s p a p e r t a p e p u n c h , w h ic h n o r m a l l y p r o d u c e s 8
c h a n n e l EBCDIC t a p e , t o p r o d u c e an 8 c h a n n e l e v e n - p a r i t y BCD
t a p e i n an on l i n e m a n n e r . T h is BCD t a p e c an t h e n b e p r o
c e s s e d w i t h an IBM -49.
The h y b r i d d a t a f ro m a r u n i s s t o r e d i n t h e 8 by 250
w r i t e a r r a y , NOUT, a s d e s c r i b e d i n C h a p t e r 4 . T h is w r i t e
a r r a y , NOUT, i s t r a n s f e r r e d t o s u b r o u t i n e PPTIBM, w h ic h p e r
fo rm s t h e p a p e r t a p e p r o d u c t i o n . D a ta f ro m two t im e i n c r e
m e n t s , a t o t a l o f 16 v a l u e s , i s r e a r r a n g e d i n t o t h e 1X16
a r r a y , NDATA; s t a r t i n g w i t h t h e v a l u e NOUT ( 1 , 1 ) s t o r e d i n
NDATA ( 1 ) and f i n i s h i n g w i t h t h e v a l u e o f NOUT ( 8 , 1 + 1 ) b e i n g
s t o r e d i n NDATA ( 1 6 ) . T h i s d a t a w i l l e v e n t u a l l y b e p u n c h e d
on a s i n g l e 80 c h a r a c t e r c o m p u te r c a r d w i t h t h e f o r m a t o f
208

1 615 . T hen t h e n u m b ers s t o r e d i n NDATA a r e b r o k e n down i n t o
i n d i v i d u a l c h a r a c t e r s ( s i g n s , n u m e r a l s , a n d b l a n k s ) , c o n v e r t e d
from EBCDIC t o BCD by m eans o f a t a b l e l o o k - u p , a n d s t o r e d
i n t o t h e 1 x 80 a r r a y , NDUM. F i n a l l y , t h e a r r a y , NDUM, i s
t r a n s f e r r e d t o t h e p a p e r t a p e p u n c h f o r o u t p u t t i n g . T h i s i s
a c c o m p l i s h e d by u s i n g a s s e m b ly l a n g u a g e s t a t e m e n t s . I t i s
i n t e r e s t i n g t o p o i n t o u t t h a t t h i s i s e a s y t o do w i t h t h e
h y b r i d s y s te m b e c a u s e t h e c o m p i l e r a l l o w s t h e m ix in g o f
b o th a s s e m b ly l a n g u a g e a n d / o r F o r t r a n s t a t e m e n t s i n t h e same
p ro g ra m .
A f lo w d i a g r a m o f t h e d a t a c o n v e r s i o n p r o c e s s i s g i v e n
i n F i g u r e E - l , w h i l e a l i s t i n g o f s u b r o u t i n e PPTIBM c an b e
fo u n d i n A p p e n d ix F .

APPENDIX F
COMPUTER LISTING OF HYBRID PROGRAM

u u
u o
JOB-o r t r a n h g o .l s .s *
DIMENSION PLANE!J>,GUN(3>,NUM(SC>, VALUE!5C»•ANGC2> .IT IME< 2 0 > ,CV( 9) .QEPI2) . SCALE ( 2 ) . TCMOSS ( 10 > • JOUTIB . 2C *: . 4 ) • 2K0UT( 9 .20 0 «LUUT(H* 20'*') ,M0UT(8.20O ,NOUT(8,20t >ECU I VALENCE (JOLT<1, 1 * I).KC1UT<1*1>),(JOUT(1 ,1,2),LOUT! 1 . 1 ) 1 I t(JOLT( 1•I,3)•MQUT(1*1 ))«(JOUT(1,1,4) ,NOUT< 1,1))DIMENSION nPATHI1G > *NCR0SS(1.>,X(5.1j0),Y(5.IO0>,Z(5,10Q>
PLANE (3) TARGET LOCATION VECTOR <FTJ 4GUN I 3) TARGET IN GUN SYSTEM (FT) *AZ IM AZIMUTH MISSALIGNMENT <RAD» 4ELt V ELEVATION MISSALIGNMENT (RAO) 4NUM( SC) POT NUMBER 4VALUE! S O POT VALUE 4THOA ELEVATION POSITION OF GUN 4PHI AZIMUTH POSITION OF GUN 4NP NUMBER OF POTS TO BE SET 4
SET UP ANALOG COMPUTER
23 READ!5*2) NPREAD I 5 • 2 ) ( NUM ( I ) , VALUE( 1 ) * 1= l .NP)4RITEIE.J>DO 6 I - l .NPCALL SPOTINUMd), VALUE ( I ) )CALL SACO( *P • ,NUM( I )}

c al l O W i) {RVALUE )WRITE (6. 4) \U*(I)» VALUE< I > .RVALUE
5 CONTINUECALL5AV01 'PC1 )AL T = 1 v .rad = ?• i a i s o / i R:•CVLPu = I : l BC ■»I SAVi_ = 1TERM = 3 9a 75PR TINT = ,25NPTS = T CRM/PR T INT+1*TSTOP = TERM ♦ PRTINT/2#C R£AD(5,410)NPATH,NCROSSWRITt< 6 , 4 1 1 ) (NPATHCI) .NCROSSII )* 1 = 1 * 10)D0413I=1,ICCTIM£(2*1— 1) = FLOAT( I )/2 - o
413 CONTINUE D04C3K=1,5READ! 5 * 4 0 1 ) ( Y ( K , n , Z ( K . I ) » X ( K , n , I = l , l C C )KK = KWR IT£(c * 1C 3) KKMRtTE(6.1G2HTIM£(2*I-l).X(K.I),Y<K,I),Z(K,I),|=l,lCC>Mss 1
004141=2,100IF ( Z < K » I )«LT,Z(K.M)) W = I
414 CONTINUEDZ=Z( K *M)—50C«DX=X(K,M)-150C.DY=Y(K,P)DO4151=1,100 X(K , I >=X(K,I )-OX Y(K, I > =Y ( K , I )-OY ZCK,I>=ZCK,I)-DZ
415 CONTINUE«RITEI6,103)KK* R1 T£ < 6 . 1 0 2 ) ( T 1 R E { 2 * 1 - 1 > , X ( K , I ) , Y ( K . l ) , Z ( K . I ) , 1 = 1 , 10C >

ft'"! CONTINUErcRossti)= 2 ■* size=s:SCALcIl) =*3 SC ALc(2) = *4 00412NRU 4 = 1,1 t K = N P A T X 4RUN )<x =n c r q s s <n r u n )*RirtC 1 . 2*315) K. «KX WR 1TC(6 ift2 C)K,KX CALL SAWo(*PC•)CALLSSCL(2 )AW 1TE( 112,599>PAUSECALL SSwTCHIA,JSKIP)IF(J3KIP *EO*1) GO TOA12 CALL SAKO(MC«)CALL STCO('NS*)XX =0.CIFCKX.E0.2 >XX=15?C*
77 CONTINUE J = 1TSTORE - 0,OCCC:CALL SSCL(l)INTRP=2 INTTT=3
li oo a i=i,7 E CALL CRAC(I,CV(I»I
PHI =CV(3)*3*142THCA =CV(2)*3.142 T=CV(1)*50 9IF( <TSTORE—T>#GT#3**PRTINT)GOT077 IF(T»GT»TIME(INTTT))INTRP=INTRP+1 INTTT = 2*INTRP -1PLANE( 1)=(X(K,INTRP)-XCK.INTRP-1))#IT-TIMEI INTTT-2) 1/1 TIME! INTTT)- 1 TIME!INTTT-2>)+X(K,INTRP-1 ) +XX
213

PL ANiL ( 2 ) -1 YIK. * INTRP)-Y(K, INTRP-1 ) > * IT-TI MEI I NTTT-2))/1TIMEI INTTT ) 1TIMEIIn TTT-2) )♦VIK,INTRP-1 )PLANE(J)=(ZIK,INTRP)-ZIK,INTRP-1) >*I T-TI MEC INTTT-2I)/C TIMEt INTTT) i T IME( I NTTT-2 » )*ZIK,INTRP-I I CALLROTA TE(OH I.THOA.PLANL•GUN)ANG<11 = —AT AN(GUN12) /GUNtl) )DIA - SCRTIGUNt1)4*2 ♦ SUNt2)**2)ANGI 2) = AT AN(GLNI J ) /DIA)DO ie I = 1.2IPtAQSIANGII) )»GT«ALT>ANGII) = SIGNIALT*ANGCI I >DcRII)= (ANGII)/RAD*17*7777)/SIZ£
16 IFIABSIOERI I 1 )«GT«SCALEII ) > UERl I ) =SIGNI SCALEI I) *OER( I ) )DO 9 I = 1*2
9 CALL L SDA(I * OERII))CALL TLDAIFIT*GT» TSTOREI GO TO 1?GOTO 11
lv JOUTI 1.J.ISAVE)=-20.*CV(5)*IGOCi JOUT ( 2. J. ISAVE)=-2G«*CVI4)*100 ) •JOUTI3.J.I SAVE)-ANG(1)*CMLRDJOUTI 4.J, ISAVE)=ANGI2)*CMLRDTIMEIJ) = TTHDOT=CVI6>»3*142PHIDOT =C VI7) *3*142JOUTI5.J .1SAVE)=PHI*1;0C»JOUT I 6 • J * I SAVE ) =THDA41 SGi3«JOUTI7.J.ISAVE)=PHIDOT*lOCC*JOUTIS.J.I SAVE)=THDOT*1COO*TSTORE = TSTORE ♦ PRT1NT 1FITSTORE.GT.TSTOP) GOTO 12 J = J + I GOTO I 1
12 CALL RSCL11)CALL SAM01*HO• )MR ITEI 1C2.25)

r> n o
n n
C M30=1 TERMINATE ***********************= 2 PS INT.PUNCH AND TERMINATE **********************= 3 PS INT PUNCH AND RUN AGAIN ***********************
Rr.AD( 1-.1,2? ) NGC IFIMGO.LQ.1>CALL RCLFCE WR1TZ(6.21 ;>MRITC(6.211)*R IT^{ £.212)WRITE<6.215)< J.IJOUTII.J.ISAVE).I=I.B),J=1.NPTS)WRITE< 1C2.*43)PAUSE
SWITCH 1 POSITION 1 SKIP TAPE ***********************SWITCH 2 POSITION C< SAVE AND RUN ***********************SWITCH 3--- POSITION 1 RERUN SAME CASE ***********************
CALL SSWTCH(1•I)IF( I.EQ.2)G0TQ43C CALL SSwTCHl3.1)IF CI . E C U 1)G0TG77 G0T0412
43. IF(1SAVE«EQ«4)GOT0429 CALL SSWTCHI2.1)IF(I•EQ« 2)GOTO432
42y CALL PPTIOM(KOUT.NPTS)IF( ISAVE.EQ.1)G0TO431 CALL PPTIBM(LOUT.NPTS)IF I ISAVC.EQ.2)GCT0431 CALL PPTI8M(MOUT.NPTS)IF!ISAVE.EG*3)GOTO*31 CALL PPTIBM(NOUT.NPTS)
431 ISAVE=C IF(NoO.EQ* 2 >CALL RELECE
432 ISAVI=ISAVE+1 412 CONTINUE
GO TG 4CJ2 FORMAT(I5.F1C.5)3 FORMAT(IHl« 5X.•POT ADDRESS* *5X«*DESIRED VALUE*.9X,•SET VALUE*.//)
215

* FC.RMAT(-jX. I 12,2F2'-„A)7 FORMAT C/ / S X , ‘ANALOG COMPUTER IS SET UP *** LETS oCJ'///)15 FORMAT*5X.F15,2. FI 5.3 .F15»1,F15.3,F15,1»2. FORMAT(II)25 FORMAT(SX,‘ENTER NOG*)99 FORMAT( 1H1 )
1 M FORMAT (AF 1 C * 2 >112 FORMAT(IH:,16X.‘TIMF* *15X*X»,19X*Y*,19X*Z*/17X*----•,14X*--- •17X*-
1— *•17X *---•/(AF20* 1 » >1^3 FORMAT(1H1,'DATA FOR FLIGHT CASE =*,I1C> lib FORMAT(5F 7# A )2 1*: FORMAT( 1H0, I4X, • TORQUE FT* LG/1 uOO * * 1AX *• ERROR MLS/10 * • 1 AX, • GUN P
10SITI0N RAO/IOOO**3X,‘ANGULAR ACCELARAT ION RAO/SEC/1000 * )211 FORMAT ( 1 5X * * • , 14X,-*-------- • , 1 AX, *---- -----
|-------------• , 3X , *------------------- — * )212 FORMAT( /,6X,A(RX,•AZIMUTH■,6X,•ELEVAT ION*)./1215 FORMAT(IX,(15*1CX*I5,10X,I5,10X,I5*ICX,15,1OX,15,10X,15,1CX,15,
1 6X.I5))315 FORMAT(215//1AO 1 FORMAT!1CX,3F10*1)4 1 J FORMAT(2C12)All FORMAT(25X,2110)A2C FORMAT( 1H1, 5X«*PATH = * , I2 , 5X, • 0 ISPLACEMENT CODE *12)AAC FORMAT < 5X »’CHECK SENSE SWITCHES*)999 FORMAT(1 OX,* TO SKIP SET SWITCH A a 1 • )
END
216

S U B R O U T I N E R O T A T E ( A . 0 • C O L O , C N E it )
******************* COORDINATE TRANSFORMATION SUBROUTINE ***♦! A GUN ANGLE PHI (k AD)H GUN ANGLE THEDA (RAD)ULD(3) VECTOR CONTAINING TARGET LOCATIONN£*(3) VECTOR CONTAINING TARGET LOCATION IN GUN SYSTEM
DIMENSION COLD(3)»CN£W(3)«C(3 *3) CA=COS(A)CQ=COS(B )SA=SIN(A)SU = SIN(B >C( 1* 1 > = CA*CB Ct 1.2) = CB* SA C(1.3) - -SB C(2.1 ) = -SA C(2.2) as CA C(2*3) = c.C(3.1> = SB*C A C(3•2 ) = SA* SB C(3.3) = ce DO 1Z 1=1.J SUM=„.DO 2G J=1.3
2: SUM=SUM+C(1.J )*COLD(J )1C CN£W(I)=SUM
RETURN END

suPMLuri vid ^PTir^(NAA.Nrs)DIMENSION NAA(e,25'>D I MENS ION KA(T).NCSI2C > ,NDATA( 16) .NDUMI80 ) • NB ( IC ) data nplus.^inus.nhlk.nav .NNNEL/azoO:c•:si j• bzc oo; j:■ a.,8z:C JCOC 1 c •
la z c o .r :? * * : « e z « c * : data k a/i . i ;' * i /data Ne/t z. • : ■',d7C‘:: : i ,azv0 jo;o: 2 .az: j: : i3*hz_v-C-wvA.
l h»Zv. c ; : . . l o . a z ; : . : i b . e z ^ j . r j j t; 7 . 8 Z O ‘. o ; < J O ' : 8 * 8 Z o ; ; c ; : i •>/
*** U5E« SUPPLIES
* NAA(I,J) an e p y n m a t r i x c o n t a i n i n g t h e d a t a t o be p u n c h e d o n t a ^ e I REPRESENTS THF 8 VARA6LES PHI.THEDA ETC*J REPRESENTS THE NUMBER OF TIME STEPS TO BE PUNCHEDTHE VARABLE J MUST BE AN EVEN NUMBER SINCE THE FORMAT FOR THE TAPE IS 1815) FOR EACH TIME STEP • IN OTHER WORDS YOU GET TWO TIME STEPS PER CARO
YOU GET J/2 CARDS AND J/2*B INCHES OF PAPERTAPE PER RUN GOOD LUCK WITH THE PROGRAM SEE YOU ABOUT THE 5TH OF JULY TOMMY PERKINS
w R I T C { 6 • 2 1 C )WRITEC6.211) wRITEIE.212)DO EC 1 N TP =s I.NTS.2 CALLSSWTCHIA,JSKIP)IF< JSKIP * EQ*1)GOT06Gl JTP = NTP + 1wRITc(6*215)NTP.(NAA(I.NTP),1=1,8)
218

v»9 I Tu ( fc . El 5 > JTP. (NAA( I , JTP) • 1 = 1 *cl>DO 6C? MPT - 1*~MMT = MPT + o NPATA(MPT) = NAA(MPT.NTP)
b ? 2 NDATA(WMT) = NAA(mpt,JTP)DU 7 I = 5.H: . «J = 1/3NG I GN = MINUS1F(NDATA( J) ,GE» . JNS1GN = NPLUS NDATA(J) = IABS(NOA T A(J ) )LLP = 1 - 4 DO A L = 1.3LL = LLP ♦ LNDUMM = NDA TA(J >/KA(L) ♦ INOATA(J) = NDATA(J) -(NDUMM-1)*KA(L>
8 NDUM(LL>= NB(NOUMM)NDUMM = NOATA(J) ♦ 1NOUM(I) = NB(NOUMM)LLL = 1 - 3DO 9 L = LLL.ILL = L - 11F(NDUM(LUN£#NB( 1 » > GOTO 1C
9 NDUM(LL) = N8LK NDUM([) = NBLK GOTO 7
i: NDUM(LL) =NSIGN 7 CONTINUE
s L I • 1 V
s LI.5s LI .6 3
toMVO

Lwi A 41.1 SL S • j L* . A
1CW. 1ln =:S I * • 3 A I * b A I * 1 A I * 6 Cl ,5 fiNE
NOOM * 1
vOLN', 1S A
tSss
7 : s N C S * 6 1
c
SS
A2 C 7 1 Sc
CALL VnhA TE INCS.dC 1 NCS(1) = NNN=L CALL KhATclNC S * 1)
t : i CQNTlNUF 12 KORMAKSX.Llie)le; f o r m a t (bx, u ; 1 lo FORMAT ( 5X.61 1-: )
2i: FORMAT!1H1.I AX*•TORQUE FT«L3/1C30• .1 AX , •FRROH MLS/1C• •1AX••GUN P iOStTlON RAD/1CCC•*3X,•ANGULAR ACCELARATIQN RAD/SEC/IvC'*)
211 FORMAT! 1 5X , • • , 1AX. • • , I 4 X . •----------1 • • 3X »-•----------------------------------- • >
212 FORMAT! /» 6X.A!RX ••AZIMUTH* »6X#*ELLVATIQN* )*/)215 FORMAT!lX.!I5,l\X.I5*l:x,IS.13X*15.i:X.I5.1CX.IS*KX.IS«irX.I5,
1 6X, 15 > )RETURNEND
220

LYMBCL LC, S I .oCDEF «IHA TEWLF FC69
i»' h A T F L * « 1 J * 15s T * . n L>GFFA I . 1: 1L « • 1 3 * 1 5L» * 1 3 *1 3S T » • 1 J HYTCALI, 1 FP TA I t 15 1B *15
FPT GEN.fl,24 X •DATA X • 30A
Ri-FF HLS 1-YTE RES 1
END
K>KJ

t -LC A Li ( GO ) . ( UDCb • 6 ) . ( T E M P , 4 J > • ( L I B *USEH* SYSTEM ) « ( F O R r • 1 6 J C ) /, ASSIGN (F.5,51), A S S I G N ( K „ 6 , L f l ) . V F C ' A S S I G N ( F „ 1 ' I • OC > • VFC;ass ion (f :i :?.u c ).v f c
i S S IGIJ ( F I ): -E. SIONI ( F v i i i ^ P A ' l ) « ti 1 N
- V 'j yf
145 a 2926 C« 5 11 >176215 C*32. *15923E « £ 20 3t> :^54: ,59541 a49J 45 *14*35. .,33951 ,4«S9 ; 292 *4
V
222

APPENDIX G
LINEARIZATION OF THE GUN MODEL
The p r o c e d u r e u s e d t o l i n e a r i z e t h e n o n - l i n e a r gun model
d e v e lo p e d i n S e c t i o n 3-4
■ *
© L I M = <T ( t ) - E1 © LIM> G - l
. . Jfi><j^LIM = _1 ( T ^ ( t ) - B 0 L I M ) G-2
*
i s p r e s e n t e d i n t h i s a p p e n d i x . W here t h e l i n e a r fo rm was
c h o s e n t o bet * *
T O + & = K#U ( t ) G-3
w h e re T a n d K a r e p a r a m e t e r s t o b e d e t e r m i n e d .
The t e c h n i q u e u s e d c o n s i s t e d o f d r i v i n g b o t h t h e n o n
l i n e a r m o del a n d t h e l i n e a r m o d e l w i t h t h e same f o r c i n g f u n c
t i o n , m e a s u r i n g t h e d e g r e e o f c o r r e l a t i o n b y c o m p u t in g t h e
i n t e g r a l o f t h e e r r o r s q u a r e d , a n d a d j u s t i n g t h e p a r a m e t e r s o f
t h e l i n e a r m odel CT a n d K) i n a s e a r c h p r o c e d u r e C p a te r n s e a r c h )
t o p r o v i d e t h e b e s t f i t . F i g u r e G - l i l l u s t r a t e s t h e p r o c e d u r e
u s e d .

F O R C I N GF U N C T I O N
N O N L I N E A R eM O D E L
1 >
c
L I N E A R 0
M O D E Lt -------------
E R R O R( E R R O R ) d t
/ A D J U [ L I N E \ T H E
P A T E R N S E A R C H
8 T P A R A M E T E R S IN THEA R M O O E L TO M I N I M I Z E E R R O R )
F I G U R E G- l F L O W D I A G R A M OF L I N E A R I Z A T I O N PROCEDURE

APPENDIX H
COMPUTER LISTING OF DIGITAL SIMULATION

MAIN PROGRAMDOUflLfc PRECISION Z ! 8 ) .ZNEW( 8 > • SUM(8 ) *FU N( 0 ) . KKC4 , 8 ) *
I T * T1 • DELTCCMMON I PR I NT .KOUNT • OELT • T. TI • TF IN • TI_OG IC * ISTP COMMON /AREA I / TI . TL • TN.TD«KP• SPJET• TH1LIM. TH2L1M.
1PH1LIM.PH2LIM,JTHDA.JPHI.BTHDA.BPHI.RAOEG.CMILRD COMMON /AREA4/PLTZ!2.8t).OUTPUT! 2 . 5 0 0 ) .KCCNT COMMON / PERK/Z1LIM .Z2LIM.GA IN.ALPHA. ADDER REAL JTHOA.JPht.KP RADEG = 2 . 4 3 . 1 4 1 5 9 3 / 3 6 0 .CMILRC = 1 0 1 8 .6 READ!5 . 2 )NRUN TH1LIM = TH1L IM4RA0EG TH2LIM = TH2LIM4RA0EG PM1LIM = PHILIM4RADEG PH2LIM = PH2LIM4RA0EG 00 1 1 = 1 .NRUNREAD!5 .1 0 0 0 ) Z1L1M.Z2LIM.GAIN.ALPHA*ADDER
1000 FORMAT!5F10.2)WRITE!6 . 1 0 0 1 ) Z1L1M.Z2LIM.GAIN.ALPHA• ADDER
1 0 0 1 FORMAT! lO X . 'A C Q U l R MODE PARAMETERS*/I OX*Z1L1M = • . F I S . S / 1 O X • • Z2LIM 1 = • . F I S . 5 / 1 OX. 'GAIN * • . F 1 5 . 5 / 1 OX.'ALPHA = • . F 1 5 . 5 / 1 OX. » ADDER = • 2 . F 1 5 . 5 / / )N * 8 ICASE = 1OELT = 0 . 0 5CALL RUNGAIZ.ZNEW.XK.SUM.FUN.N.ICASE)OO 10 J= 1.KCCNT
10 WRITE16.3) (OUTPUT(L.J ) , L = I . 2)K=0DC 4 J=1 . KCCNT. 5 K= K + lPLTZ! 1 . K)= OUTPUT!l.J)
4 PLTZ!2.K)= OUTPUT!2 . J )
22t>

WRITEC6.5) CPLT7!1.J ).PLTZ<2,J ).J= 1 .K )5 FORMAT{20X * 2F15*3)
CCCCCC CALCULATE COST FUNCTION CCCCCC CC USE THE ISE COST FUNCTION AND CC THE TRAPIZODIAL RULE FOR INTEGRATION C
TFIKAL * 30*N = TFINAL*10.+ 1.NM1 a N - 1COST = (OUTPUT(I•1)**2 + OUTPUTI 1»N)**2)/2.0 DO 11 J * 2.NM1
11 COST = COST ♦ OUTPUT! l . J 1**2 COST = COST♦DELT MRITE<6.12) NtCOST
12 FORMAT!10X,15.'POINTS MERE INTEGRATED TO YIELD COSTIISE) **.F15.S) C CCCCCC CCCCCC
CALL PLOT!K >1 CONTINUE2 FORMAT!13)3 FORMAT!10X.5F15.5)
STOPENO
roN1

s u b r o u t i n e t a r g e t * t 3 . ZZ)COMMON / AREA 1 / T I * T L » T N . T O . K P . S P J E T . T H I L I N . T H 2 L I M •
1 P H 1 L I M . P H 2 L I M . J T H O A . J P H I . B T H D A . B P H I . R A D E G . CMtLRD REAL J T H C A . J P I - I . K P DI MENSION ZZ( 6 )READ* S . 1 ) Xt.X2.TM
I FORMAT( 3 F 1 0 * 3 )WRITE* 6 . 2 ) X 1 . X 2 . T M
2 F O R M A T * 1 0 X . ' F L I G H T PATH DATA ---------- X QRG = • . F 1 0 . 3 / .1 3 5 X * * XF IN ss ' . F 10 • 3 / 3 5 X . • TCHN = * . F 1 0 . 3 )
XO = XIYO = 1 5 2 0 0 . 0 0 0 ZO= 3 7 5 . 0 0 XV - 0 . 0 0 0YV = - S P J E T * 6 0 6 7 . / 3 6 0 0 .ZV = 0 . 0 0 0 RETURNENTRY W H E R E * T 3 . Z Z )ZZ* 1 ) * XOI F I T 3 . G E . T M ) Z Z * 1) = X2
Z Z * 2 ) * YO ♦ YV*T3 Z Z ( 3 ) - ZO ZZ ( 4 ) * XV Z Z * 5 ) * VV Z Z ( 6 ) * ZV RETURN END
2?8

SU6R0UTINE ACQU1R! PHI*PHID.T1.TTS.TTF*ERROR•TQR. TF IN)COMMON/6LK1/KACC DIMENSION ZZ!6).ERROR!2.2>REAL K , K PFUNF(X) = 2.*X ♦ < 1 ./1<P*K ) )*! X 10-XlF + TAU* I X20-X2F) )f u n s t x j = <x 2 f +k p *k ) * e x p ! - x / t a u ) / e x p i - f u n f ! x > / t a u ) - 2 . * k p *k + i k p * k- IX20)*EXPC-X/TAU>CALCIIX.V) = AT AN2I V • X )CALC2(X* XO ,Y,YD) a IX*YD-Y4XD )/( X4X4Y*Y)RADEG a 2.*3.1A 159/360.KP = 1 . 7 5 3 3 TAU « 4 9 . 9 7 tCACO a KACQ + 1 I F I K A C O .G T . 1 0 ) GOTO 1 0 4 A = 1 . 0 0 0 0 0 I a 1TF a 1.1 + T1X10 a PHIX20 a PHIDEZERO a ERROR!1.I>K a 10.0IF!EZERO.GT.0.00) K a -10.TOR a KCALL WHERE!Tl.ZZ)EPS a 0 . 0 0 0 1P 10 a PHI/RAOEGP 2 0 a PHID/RAOEGX I I = CALC1! Z Z ! 1 ) • Z Z ! 2 ) ) /RADEGX 12 a CALC2 ! Z Z ! 1 ) . Z Z ! 4 ) . Z Z ! 2 ) . Z Z 1 5 ) ) /RADEGW R | T E ( 6 . 5 0 0 ) T l . P 1 0 . P 2 0 . XI I . X I 2
5 0 0 FORMAT 1 S X . • IN IT IAL CONOITIONS• / O X , • TIME* . 2 1 X . * G U N * . 3 7 X , * P L A N E * / 5 X , 1 FI 0 . 5 . 4 £ 2 0 . 6 )
102 CALL WHERE!TF *ZZ)X a ZZ! 1 ) bZ
Z

Y a Z Z ( 2 )X1F s CALC1< X .Y >X2F a C A L C 2 ( X , Z Z ( 4 ) « Y , Z Z ( 5 ) )TL = 0 . 0 1 TR a 8 . 0
7 3 FTL = FUNS<TL )FTR = Funs ( t r )I F ( FTL * FTR ) 2 1 * 9 9 , 4 0
21 TAPP a TL + ( T R - T L 1 / 2 . 0 FTAPP = FU N S(T A P P )I F ( A B S ( T R - T L ) * L T , 0 . 0 0 1 ) G Q T O 9 9 FTSQ a FTAPP * FTAPP IFC SORT( F T S Q ) - EPS ) 9 9 , 9 9 , 6 0
6 0 I F ( F T A P P * F T L ) 6 5 , 9 9 , 7 5 6 5 TR a TAPP
FTR a FTAPP GO TO 21
7 5 TL a TAPP FTL a FTAPP GO TO 21
4 0 I F ( A B S ( F T L ) , G T * A B S ( F T R ) ) TLaTL + 0 , 1 I F I A B S ( F T R ) , G E • A 0 S ( F T L ) ) TRaTR - 0 , 1 I F ( T R . L E . T L ) GOTO 11 GOTO 7 3
U TAPP * TL 9 9 TMAX1aTAPP
TMAX2 a FU NF(TM AXl)TS a TMAX1 ♦ Tl T T F I N a TMAX2 ♦ T l ♦ TMAXl OER a EZERO/RAOEG CALL « H E R E (T T F I N ,Z Z )X a 2 Z( 1 )Y a 2 Z ( 2 )X 1FO a CALC1I X, Y l /RADEGX2FC a C A L C 2 I X ,Z Z ( 4 ) * Y , Z Z ( 5 ) l /RADEG

*RlTEtb. 100) TUTS. TT FIN, OER.X 1FO.X2F0 100 FORMAT(5X « 6E15.5)
CHECK = ABS(T TFIN-TF)IF(CHECK.LE.0.01) GOTO 101 IF( I.GT.6) A = 0.6000 1 = 1 * 1IF(I.GT.ISO) GOTO 10*TF = TTF1N*A ♦ (A - 1.000>*TF GOTO 102
10 1 CONTINUEIFtTMAXl.LT.EPS) TMAX1 = O.COO lFtTMAX2.LT.EPS) TMAX2 = 0.000 TTS = TMAX1 TTF = TMAX2 GOTO 105
10* TF IN = 3.105 RETURN
ENC
s>

CCCCCccCCCCC
100
ccc
66 6
SUBROUTINE DEHIV(Z.FUN.N)DOUBLE PRECISION Z ( 8 ) • FUN( B >, T , T 1 .DEL TCOMMON IPRINT .KUUNT• O E L T , T , T l , T F I N « TLOG1C * 1 STPCOMMON / A R E A ! / T 1 . T L . T N . T D , K P • S P J E T . TH1LIM• TH2LIM.P H 1 L I M .P H 2 L I M ,J T H D A ,J P M I , BTHDA*BPHI, RAOEG• CM1L « 0 COMMON / P E R K / Z 1 L I M . Z 2 L I M , GAIN,ALPHA.ADDER REAL J T H D A , J P H . K PDIMENSION Z Z ; 6 ) .HUMAN!2 , 4 > ,Z 11 8 ) .ERROR( 2 . 2 ) .P L A N E ( 6 )DATA HUMAN/A.8 4 7 8 . 8 2 3 . 0 8 3 . 2 . 4 , 2 . 4 , 1 6 . • 1 6 . • 1 6 . • 1 6 . /TF IN = 1 . 0 T = 0 . 0 0 0 TLOGIC = 2 . 0 0 KT VPE = 2 KHG * 1GC = I . 0 / 1 T N 4 T I )G1 « T l ♦ TN IS T P a 1 0 0 0 NPT * 1 0 0CALL TARGET!TCROSS,ZZ)CALL CELAY( N P T )CALL tfHERE( 0 . 0 * Z Z )
CCCCCREAD IN FL IGHT DATA AND RETURN TCRQSS AND ZZ AT TIME EQUAL 0 . 0 0 0
CCCCCDO 1 0 0 J * 5 , 8 Z ( J ) * 0 . 0 0 Z ( 2 ) = 0 . 0 0 ZI 4) = 0 .00
IFIJLK IS LESS THAN 1 THE I N I T I A L CUN P O SITIO N I S CALCULATED
READ!5 . 6 6 6 ) JLK.A.E FORMAT( I 1 0 . 2 F 1 0 . 5 )

IF ! JLK «LT • 1 ) GOTO 667 Z(1) = A Z!3> a E GCTC 668
667 ZZX s ZZ(1 )ZZV = ZZ12)ZZZ = ZZ(3 )01 A 3 SCRT(ZZ{ IJAZZC1> ♦ ZZ!2 )*ZZ(2)>Z(l) = AT AN2iZZY.ZZX)Z! 3 ) * -ATAN2!ZZZ.D1A)
658 OTl * TFILIM/RADEG 0T2 = TH2LIM/RACEG OPIspHILIH/RADEG 0P2 3 PH2LIM/RADEG WRITE16.967) Z!ll.Z!3)
967 FORMAT!10X.*THE INITIAL POSITOON OF THE GUN IS AZIMUTH 3 «.F15.5. 15X.*ELEVAT ION s *.F15.5/)WRITE!6.501)BPHI. OP 1.TI.HUMAN! I•I).HUMAN!2•1)•1JPHI. 0P2.TL* HUMAN(1*2).HUMAN!2*2).BTHOA• OTI.TN,2HUMAN!1.3).HUMAN!2.3).JTHDA, 0T2.TO,HUMAN 11.4).HUMAN!2,4)WR ITE16.502 >T2 3 Ti m o o e = o t x o z = o .TQXV 3 0.CALL EVALlT2» Z,ERROR.PLANE )CALL WMOOE!ERROR. IMODE.T2 )IF! IMCOE.EQ.1 ) CALL SETUP!Z.T2.ERROR•TFtN.TXOZ)
502 FORMAT!27X.•|OEGREES)*.4 0X.*(MILLS)*/lX.*TIMc* • 9X»1*PHI•.8X.•PHIC*.9X.*THD*.8X.•THDD•.7X,•ERPHI•*6X••EROOTP* *7X.2*T CPHI *.7X**ERTHD*.6X.*ERD0TT*.7X.•TQTHD*//)
501 FORMAT(56X.•SYSTEM PARAMETERS**//85X. •BEFORE*.1 OX.•AFTER•/112X.* EPH1••FI 1,2.5X,*PHILIM••F 10.2•5X.*TI*.F10.2.5X.•0*. 2F13.2.5X.F10.2/12X.*JPHI•,F11.2.5X,*PH2LIM•,F10.2.5X.•TL* • 3F10.2.5X,•PPP'.FI 1.2.5X.F1C.2/12X.*B THDA *.F10.2,5X.•TH1LIM••

4F10.2.SX*•TN* .FlO.2.5X,'POWP* *F|0.2•SX*F10•2/12X,•JTHDA*,F10.2. 55X «•TM2LIM* ♦F10.2.5X.*TD**Fl0*2*5X.*POWT* *F10.2.5X.F10.2///)RETURNENTRY DER(Z.FUN)
CCCCC NONLINEAR GUN MODEL CCCCCc cc cC Z ARRAY OF STATE VARIABLES CC Z(l) OH PHI AZIMUTH ANGLE OF GUN CC Z (2) ANGUt-AR VELOCITY OF GUN AZIMUTH CC Z(3) OR THEDA ELEVATION ANGULAR POSITION CC ZI4) ANGULAR VELOCITY ELEVATION CC CC CCCCCC CCCCC
T2 = TlCALL CLY0UT(T2«TRPHI,TRTHDA.Z) PHI = Z(l)DPHI = Z (2)THEOA * Z(3)DTHEDA s Z(4)IF(ABSIDPHI).GT.PH1LIM> GOTO 1 FUNI1) a Z(2)DOPhI s ITRPHI-ePHIAZt2))/JPHl IF!ABS(CDPHI>.GT*PH2LIM)GOTO 2 FUN(2) s DDPHI GOTO 3
1 FUN(l) s SIGNIPH1L IM.DPHI )FUN(2) = 0.0Z < 2 1 * FUNII)GOTO 3
2 FUN12) s S IGNIPH2L IM.DDRHI )3 CONTINUE
IF(THE0A.GT.0«0) GOTO 7 IF(ABS(OTHEOA ).GT.TH1LIM) GOTO 4
W.Z

FUN(J> a Z ( 4 )DOTHOA a (TRTFDA - BTH0A4Z(4))/JTHDA 1F( ABStCCTHDA ).CT .TH2LIM ) GOTO 5 FUM4) * DOTHCA GOTO 6
4 FUN13) = SIGN! T H u IM.OTHEDA)f u n (4) a o.oZ( 4 ) * FUN( 3)GOTO 6
5 FUN (4) a SIGN(TH2LIM •DDTHDA)6 CONTINUE
GOTO 67 Z(3> a o.O
Z( 4 > a 0.0 FUN(3> « 0.0 FUN14) a 0.0
8 CONTINUECCCCC NLOM HUMAN MODELCcc HUMANt1 , 3 ) NLDM OPERATOR PARAMETERSc ( 1 . 1 ) Q BEFORE TCROSSc ( 1 , 2 ) PPP BEFORE TCROSSc ( 1 . 3 ) POWP BEFORE TCROSSc ( 1 , 4 ) POWT BEFORE TCROSSc ( 2 * 1 ) 0 AFTER TCROSSc ( 2 , 2 ) PPP AFTER TCROSSc ( 2 , 3 ) POWP AFTER TCROSSc ( 2 , 4 ) POWT AFTER TCROSScc
T CROSS TIME TO CROSSOVER
cCCCCC
IFIKTYPE.EQ • 2 . AND.T2 •GT.TCROSS) KHO a 2CALL EVAL( T 2 , Z* ERROR• PLANE )
CCCCCccccCCCCcccccc
CCCCC 2 35

EPhI a ERROR( 1 * 1 ) + HUMAN!KH0.2)*ERROR(1*2)ETHD s ERROR( 2 . 1 ) + HUMAN( KHO, 2 )*ERROR(2 • 2 )KPPMI 3 20 .+ABS(EPHI*PLANEC 2 > ♦ 1 0 0 0 . /HUMAN!KHO.1 I > IFIKPPHI.GT . 1 0 0 . JKPPHI 3 ICO.KTHCA = 20 *♦ AES(ETHDAPLANE(S )A 1000./HUMAN(KHO.I )) IF(KTHDA.GT . 100. KTHDA s ICO.FUN(5) = Z ! 6 )FUN(6 I = (K PPH I*EPH I-Z(5) -Z(6>*G1>*G C F U M 7 J » Z ( B )FUN( 8 ) s (KTHDA*ETHO-Z(7)-Z(8)*G1)*GC RETURNENTRY OERFtN(Z)T2 3 TI F ( T 2 . G T . 4 0 . )TFIN s 3 . 0 IF (TFIN.GT.TLGGIC) GOTO 9 CALL. EV AL ! T 2 . Z . ERROR. PLANE )ATCPH1 3 PL ANE( 2 ) * HUMAN( KHO• 3 >ATOTHO 3 PLANE! 5 >*HUM AN<KHO*4 I TCPHI * —Z( 5 ) ATQPHI TQTHD s —Z (71 ♦ ATQTHOIF !A B S !T O P H I) .G T .1 0 .> T Q P H I= S IG N (1 0 . .T Q P H I)IF(ABS(TOTHO).GT.iO.ITQTHD 3 S IG N (1 0 . • TQTHD)CALL 0LYIN(T2.TOPHI.TQTHO)IF( I M 0 0 E .E 0 .2 ) GOTO 10 1F(T 2 .L E .T X Q Z ) GOTO 9 CALL WMODEIERROR.IM00E.T2)IF(1M 0CE.EQ.1 ) CALL SETUP(Z.T2.ERR0R.TFIN.TXQ2)I F ( I M 0 0 E . E 0 . 2 ) CALL LEAO(T2.ERROR. TXQY)GOTO 9
10 IFCT2.GE.TXQY ) CALL CHECK!T2 . ERROR. IMODE. TXQV.TXOZ) 1 RETURN
END

SUBROUTINE DELAY(NPT)DOUBLE PRECISION Z<8)COMMON /AREA 1 / T l . T L • TN,TD .K P . SPJET,THILIM , TH2LIM,
1PHILIM.PH2LIM*JTHDA,JPF 1, 8THDA,QPHI.RADEG,CMILRD COMMON /P E R K / Z 1LIM«Z2LIM.GAIN,ALPHA,ADDER DIMENSION STORE( 3 . 1 0 1 > • ERROR!2 • 2 ) .PLANE(6 )REAL JTHDA,JPHI.KP
CCCCC C CC TIME C NPT C TO C STORE C ST O R E ! l .X )C STCREI2.X)C STORE( 3 . X )C DTP C OTT C TP C TT C CCCCCC
NUM * 3 NPM = NPT - 1 NPP * NPT 4 |S T C R E U . t l = O.COO STORE! 2 . 1 I * 0 . 0 0 0 STORE!3 . I ) = O.COO STORE!1 . 2 ) « TO STCRE!2*2 I = 0 . 0 0 STORE I 3 , 2 I = 0 . 0 STO RE!I .NPP) = 1 0 0 0 0 . 0
NOMENCwAYURE CCCCCCC
TIME SUBROUTINE CALLED CNUMBER POINTS IN STORAGE ARRAY C LENGTH OF TIME OELAY CNAME OF STORAGE ARRAY CVALUES OF TIME CVALUES OF TORQUE AZIMUTH CVALUES OF TORQUE ELEVATION CCELAYEO TORQUE AZIMUTH CDELAYED TORQUE ELEVATION CINPUT TORQUE AZIMUTH CINPUT TORQUE ELEVATION C
Cc
CCCCC

c c c c
c c c c
7
BGKMOO = 0 *PTF = 0.PTFP = 0.ENOMOCZ Z Z Z Z - 2 1 L IM /1 C 1 8 .6 RETURNENTRY SETJPCZ ,PTB.ERROR* TFIN.TXQZ >PHI s Z i I )PHIC = 0 .CALL ACOUIRCPHI.PHID.PTB.PTS.PTF.ERROR»PTQt. TFIN)PTFP* PTF+ AOCER PT 02 = -PTOI TXQZ sPTFP
NOTE CCCCC
THIS SECTION ALLOWS THE OPERATOR TO INPUT C HIS OWN SWITCHING DATA CWHERE PTB s BEGINNING OF CONTROL SEQUENCE
PTS s SWITCH TORQUE PTF s END OF CONTROL SEQUENCE PTFPs RTF ♦ 0 . 5 P T Q ls FIRST TORQUE PTQ2s SECONO TORQUE
CCCCCC
W R IT E (6 .7 )P T B .P T S .P T F .P T Q I .P T Q 2 .P T F PFORMAT( 1 OX.• PTB s • , F 1 5 . 5 / 1 OX. «PTS * • *F15 . 5 / 1 OX.■PTF 3 » , F 1 5 . 5 / 1 O X.* PT GI3 * , F 1 5 . 5 / 1 0 X . • PTQ2= » . F I S . 5 /1 OX• 'P T F P * • . F l 5 . 5 )RETURNENTRY LEADC T2 .ERROR.TXQY)ERROLO 3 ERROR( 1 . 1 )ENOMOO = T2 + 0 . 0 5 TXQY 3 ENOMOD JACO 3 i NERN s l
BCZ

TOLEAO * - 1 0 .I F ( ERROR( 1 * 1 J . L T . O . > TOLEAO* 10.BGNMOD * T 2■RITE!6 , 5 0 0 ) T2 . ERROR!1 . I).TOLEAO
500 FORMAT!IOX,*BEGIN LEAD TRACKING TIME * * , F I 0 . 2 . » ERROR * * , F 1 0 , S , 1 •TORQUE * * . F 1 0 . 2 )
RETURNENTRY CHECK!T,ERROR,IMODE. TX0Y.TXO2>IFIN ERN .EQ.2) GOTO 309I F ! ERROR!1 , 1 )*ERROR!1 , 2 1 > 3 0 9 , 3 0 0 , 3 0 0
309 IF !JA C Q .E 0 ,5 > GOTO 307 E20LD * ERROR 1 1 , 2 )JACQ * 5NERN * 2
3 0 7 IF!ERROR!1 , 2 1 *E20LD>3 1 0 , 3 1 1 , 3 1 1 311 IF1ABS1ERRO R!1 ,2))«LE«0,01 ,A N D,A 8S(ERRO R!1 ,1) ) ,LE ,ZZZZZ)G O TO 3 1 0
TOLEAO * 0 .• R I T E ! 6 * 5 0 3 ) T,ERROR!1 , I ) , ERROR!1 . 2 ) .TOLEAO
5 0 3 FORMAT!10X,*HA—HA*, A F 1 0 .4 )300 ERROLD * ERROR! 1, 1)
EN0M0D * T + , 0 5 TXOV * EN0M0D GOTO 320
310 IMOOE * 0 W R IT E!6 .50 I> T .ERROR!1 , 1 )
501 FORMAT!1OX,*ENC LEAD TRACKING TIME * • . F I 0 . 2 . ‘ERROR * • . F 1 0 . S ) 320 CONTINUE
RETURNENTRY 0LYIN!TIME.TP.TT)IFINUM.GT.NPT ) GOTO 1 STORE!1,NUM) a TIME ♦ TO STORE!2.NUM) * TP STORE!3.NUM) * TT NUN 3 MUM ♦ 1 RETURN

1 00 2 J=1 . NPM I * J ♦ 1STORE!1•J ) = STORE( 1 * 1 )STORE!2*J) * STORE!2*1)
2 STORE!3 . J) * STORE!3 * I)STORE!1 . NPT) x TIME 4 TO ST0RE!2tNPT) * TP STORE!3.NPT) * TT RETURNENTRY OLYOUT! TIME.DTP.OTT• Z )DO 3 1 * 2 , NPP1F!TIME.LT.ST0RE!l.I)> GOTO 4
3 CONTINUE4 IF!I.GT.NUM.OR.I.EO.NPP) MRITE16.5ITIME
NI > I - IFT » ( TIME—STO RE!I*N I) I / ! S T O R E ! 1 • I )—S T O R E !I .N 1 1)OTT « ! S T 0 R E ! 3 . I I-STOREI3.Nl)»*FT 4 ST0REf3.NI)OTP *f STORE!2 . 1 ) —STORE!2.NI) )4FT 4 STORE!2.NI)TOOLO m OTPIF!TIME.GE.BGNMOD.ANO.TIME.LT.ENOMOD) GOTO 50 IF!TIME.GE*PTB.AN0.TIME.LT• PTF> GOTO 100 IF!TIME.GE.PTF.AND.TIME.LT.PTFP) GOTO 150 GOTO 200
50 OTP * TOLEAO GOTO 200
100 OTP « PTQ1IFIT1ME.GE.PTS) OTP » PTQ2 GOTO 200
150 CALL EVAL!TIME.2 . ERROR.PLANE>TORN » JPHI*PLANE!3) 4 BPHI4PLANE12I - GAIN*! ERROR! 1 . I ) 4 ALPHA*
1ERR0R!1 * 2 ) )IF(ABS(TORN).GT. 1 0 . ) TORN*SIGNf1 0 . . TORN)TACO * PTFP - TIMEXLAMDA * ! ADOER - TAOO)/ADDEROTP s XLAMDA*TORN 4 It-XLAMOA)*TOOLO
240

I F ( ABS( D T P ) * 6 T . 1 0 . )OTP a S IG N ( 1 0 . . D T P )WRITE<6.13) TORN.ERROR(I.1 > .ERROR( 1 . 2 > . TI ME
13 FORMAT( 10X * *TO*ERROR! 1 . I ) • ERROR( 1 * 2 ) * • IOX*4F15*5)2 0 0 CONTINUE
RETURN5 FORMAT( 5 X . • * * * * * ♦ * ♦ * ♦ ♦ * * * * ♦ • * * * ' . / / S K * • AT TIME * «
1 FI 0 . 5 . S X . ‘ INCORRECT VALUE FOUND BY SUBROUTINE D E L A Y '• 2 / / 5 X . • • * • ♦ ♦ * * * * • ♦ * * * ♦ • * * * * • / ✓ ✓ ✓ / )
ENO
241

SUBROUTINE VMOOEIERROR*I.T)COMMON /P E R K / Z I L I M .Z 2 L I N .G A I N .A L P H A .A D D E R DIPENSIO N E R R 0 R ( 2 . 2 ) . Z Z f 6 )DATA A 1 . A 2 . C M R / 2 5 . . 1 0 0 . . 1 0 1 8 . 6 /1 * 0VI * ABS( ERROR ( 1 . t > ) *CMR/Z 1LIM V2 * AB S(E R R O R !1 . 2 ) >*CMR/Z2LIN VALUE * VI ♦ V2 I P ( V A L U E . G E . 1 * 0 ) 1 * 1 I P ( I . E O . O ) GOTO 10 CALL V H E R E ( T .Z Z )D IS T * S O R T I Z Z I 1 ) * * 2 ♦ Z Z ( 2 ) * * 2 ) I F ( 0 1 S T . L E , 2 S 0 0 . ) 1 * 2 RETURN END

SUBROUTINE IOCATA!Z.N.ITIME>OOUBLE PRECISION Z<8 ) • T .T 1 .DELTCOMMON i p r i n t . ko unt . d e l t . t . t i . t f i n . t l o g i c . i s t pCOMMON /AREA1/ T I . TL.TN.TD.KP.SPJET.TH1LIM.TH2LIM•
IPHILIM.PH2LIM.JTHDA*JPHI• BTHDA.BPHI.RADE6.CMILRD COMMON /AREAA/PLTZt 2* 0 1 ) • OUTPUT( 2 * 5 0 0 ) .KCCNT REAL JTHDA*JPHI.KP01 MENS ION ZOUTI1 1 ) • ERROR!2 * 2 ) .PLANE!6)T2 * T K* 2I PRINT * IPRINT ♦ KIF ( ITIME*E0*2) GO TO 2KCCNT* 0KCCNT* KCCNT ♦ 1CALL OLVOJTIT2*OTP*OTT*Z)CALL EVAL(T2*Z*ERROR*PLANE)OUTPUT( 1 .KCCNT)* ERRORC1 . 1 )«CNILRO OUTPUT!2 . KCCNT)* ERROR!2 . 1 )*CMILRD RETURN END

SUBROUTINE RUNGA <Z . Z N E t t . X K . S U M . F U N . N . I C A S E l OOUBLE PRECISION Z C 8 ) « Z N E W < 8> .S U M |8 ) . F U N ! 0 > • XK< 4 . 8 ) *
I T . T t . D E L TCOPMON I P R 1 N T . K O U N T . O E L T . T . T I . T F I N . T L O G I C . I S T P REAL MM.NNDIMENSION CON (4 . 3 ) .CONK 4 ) . C0N2I 4)IF(ICASE.EQ.2) GO TO 415 N M 2 . / 3 .M M «l. /3 .R*NN4(PM>NN)/(4a*MM**2-2•♦MM)G1m pM-4• 4NN«* 2 4 5 . 4NM-2a 6 2 - 6 . 4PP4NN—4 .4PM-4.*NN+3.S»Il.-MM)4GI/(2.*MM*<MM-MM>*G2>TT*CI.-2.4MM)• ( t.-MM)4(l.-NN)/<NN4fNN-MM)4G2)P * l .C0N1( 1 >«(6.4MM*NN-2.4MM-2a*NN+t.) / ( I2.4MM*NN> C 0 N K 2 ) » ( 2 . 4 N N - t . ) / < I2.*MM*(NN>MM)4( l.-MM))CONIf3)»<2.*MN—I • ) / ( 12*4NN4(MM-NN)«(l.-NN)1 CONK4 1 * 0 2 / II2««1 l.-MM)*I l . - N N ) )GO TO 418
415 CONTINUE MM*1s/ 2 *N N » l . / 2 .P*1 •TT-1.+SQRTI0.5)R-0 .5 /TT S* Ia-TT CONK I )*1 a / 6 .C 0 N U 2 ) * ( 2 . - T T > /3 .CONI(3J«TT/3.CQNt( 4 ) * 1 « / 6 .
416 CONTINUE C 0 N 2 II)» 0 .C0N2I2 )*MM
244

© n ♦ © © ♦ ©M a o © (* « © «© O o Ul A « A oN in o v> o x o r t H N o n o o i i o x a f i n f t f t f t o n n o x o x X oz c Q C O X O > A A o A o o O > a X > o o o o o a o o x o x X am X X A r N <_ c z r c X r z z Z Z Z z z II II A
ma ♦ A > A © r H A ♦ A ♦ © h r z A r A A A A A © X * o A *u. A C M • o ♦ N in N 01 o A H Z * ♦ u u t o x « X © • ©
ImA o A o <- o o O N A N A o Z A N H o • • • * • • • A ♦ A c oN M A i n m A z c a O * 11 U M A to A A A A A
IT (A A O «. H c X r c X in ( . A m o O X A A A A A A A X N wN c N • It *11 N -4 A M « N N > A M N II N II • n N II O NZ X A A c A A • ♦ A A A A H < -1 « X X z X o X A • Am A • • Z • N o X • c * • > A A 1 z X • X • •mc . © z z * o X M z © A N (A T * u Za a t - Tl z A N Z 1 X CJ( . ♦ A C N X z m HA X • z A 0 m a H♦ o A A Im ■ •© A 0 A A • ■nc A r * z cz * n • zA c . O A •c A Z A za • A A
8 •z XA AA
A
£*Z
♦*t«
i 06
* oa
•l
*(t)
ZN
03
NN
*(C
)ZN
DD

T*T +DELT K0UNT*K0UNT+1I F ( K O U N T .E G .I P R I N T ) C A L L IOOATA<ZNEtf*N*2)CALL OERFINCZNEV)I F ( T F I N .G E .T L O G I C )R E T U R NIFtKOUNT « G £ • 1 S T P)RETURNGO TO 4 9 9END
246

SUBROUTINE RO TA TE !A .8 . COLD.CNEMJ DIMENSION C 0 L 0 I 3 I . C N E M I 3 I . C I 3 . 3 1 CA *CO S(A)C B - C O S I 8 )S A * S INI A )S B * S 1 N I B >C l 1 . 1 >-CA*CB C ( 1 . 2 ) * C B A S A C ( 1 • 3 >*—SB C I 2 . 1 ) * - S A C ( 2 » 2 I * C A C ( 2 . 3 I * 0 .C ( 3 * 1 )» C A * S B C I 3 . 2 ) * S A * S B C ! 3 . 3 1 * C B DO 10 I « t • 3 S U M « 0 .DO 2 0 J * 1 « 3
2 0 SUM*SUM*CI I* J 1AC0L0! J I 1 0 C N E M lD s S U M
RETURN ENOSUBROUTINE V E L l A . 8 . ADOT. BOOT • AC INE R.O XINE R.D X G }DIMENSION ACINERI 31 .DX I N E R t 3 1 . D X G ! 3 I . C D 0 T I 3 . 3 1 .X E D 0 T I 3 1 .CNEMI3* CA * C O S ! A )CB * C O SIB )SA ■ S I N ( A )SB = S I N I B )C D O T I l . l ) * -ADOTASAACS - 8D 0T «C A *SBCOOT!1 . 2 ) * -BOOTASA*SB - ADOT*CA*CBC D 0 T U . 3 ) * -BDOTACBC 0 0 T I 2 . 1 ) * -ACOTACAC D C T I 2 . 2 ) * -ACOTASACOOT!2 . 3 1 * 0 . 0 L*
?Z

COOT( 3 . I ) = BOCT*CA*CB - AOOT*SA*SBCOOK 3* 2 ) * BDOT*CB*SA +ADOT*SB*CACOOT( 3 * 3 ) * -BOOT*SBDO 2 I * 1 * 3SUM * 0 * 00 0 t J * 1 • 3
1 SUM « SUM ♦ COOK I . J ) * A C I N E R ( J )2 X E D C T ( I ) x SUM
CALL ROT AT E(A*B«DXINER«CNEH )0 0 3 K x | • 3
3 OXG(K) x XEOOT(K) + CNEMCK)RETURNEND
N>00

SUBROUTINE EVALlT.Z*ERROR*PLANE)01 MENS ION ERROR!2 . 2 1 . P L A N E ! 6 > . Z Z ! 6 >*A C I N E R !3 ) .
1 A C G U N ! 3 > .D X I N E R ! 3 > .D X G U N ! 3 )DOUBLE PRECISION Z C 8 )
CCCCC NOMENCLATURE
THE PURPOSE OF THIS SUBROUTINE I S TO CALCULATE THE ANGULAR ALIGNMENT ERRORS AND ANGULAR P O SITIO N OF THE TARGET
ERROR ARRAY OF ALIGNMENT ERRORSAND O ERIVIT IVES AZIMUTH ERROR RATE OF CHANGE OF AZIMUTH ELEVATION ERROR
ERROR!1 * 1 ) ERROR!1 . 2 ) E R R O R !2«1 ) E R R O R !2*2 I
PLANE
P L A N E !1 ) PLANE!2 ) P L ANE !3 ) P L A N E ! 4 ) PLANE!5 ) P LANE!6 )
CCCCC Cc c c c c c c c c
ERROR Cc
RATE OF CHANGE OF ELEVATION ERROR C ARRAY CONTAINING ANGULAR LOCATION C
OF THE TARGET AZIMUTH ANGLE AZIMUTH VELOCITY AZIMUTH ACCELERATION ELEVAT10Y ANGLE ELEVATION VELOCITY ELEVATION ACCELERATION
CCCC
Ccccccccc
CCCCCCALL WHEREIT.ZZI 0 0 1 I a 1 * 3 A C I N E R ! I ) * Z Z ! I ) 0 0 2 I = 1 . 3 0 X I N E R 1 I ) * Z Z ! I ♦ 3 )

PHI « 2 1 1 1 OPHI a 2 ( 2 )THEDA * 2 ( 3 >DTHEDA * Z ( 4 )CALL ROTATEIPHI,THED A,ACINER.ACGUN)Z1 * ACCUNI1 ) AACGUNtI> t A C G U N !2)*A C G U N (2)2 2 * SORT( 2 1 )2 3 « ACGUN!I>4ACGUN(11 ♦ ACGUN!3>*ACGUN!3)ERROR( I , | ) * -A T A N C A C C U N ( 2 ) / A C G U N ! 1 ) )ERROR( 2 , I ) * ATAN(ACGUN!3 ) /ACGUN( 1 ) )CALL V E L ( P H I • THEDA,DPHI,DTHEDA• ACINER, 0 X 1 NER. DXGUN) ERROR!1 , 2 > * ( A C G U N t 2 >*DXGUN!1 ) - ACGUN11 >*DXGUN(2 > > / Z 1 E R R 0 R ( 2 . 2 > * ( ACGUNI I >«OXGUN< 3 > - ACGUNt 3)*DXGUN! 1 ) ) / Z 3 Z1 * Z Z ! l ) * Z Z ( i > ♦ Z Z ( 2 ) * Z Z ( 2 )2 2 * SORT( 2 1 >Z 3 * Z Z ( I ) * Z Z ( 4 ) 4 Z Z ( 2 ) * Z Z ( 5 )PLANE( I ) * AT AN2( ZZ( 21 , 2 2 ( 1 ) 1PL ANE !2 1 * ( Z Z ( 1 > * Z Z ( 5 ) - Z Z ! 2 ) * 2 2 ( 4 ) J / 2 1PLANE!3 ) * 0 . 0PLANE!4 ) « - A T A N 2 ( Z Z ( 3 1 . Z 2 )PLANE( 5 ) * ( Z Z ! 3 ) 4 2 3 —Z Z ! 6 ) 4 2 1 > / ( Z 2 * ( 2 1 ♦ Z 2 ( 3 ) * Z 2 I 3 ) > )PLANE!6 ) * 0 . 0 0RETURNEND
250

SUBROUTINE PL OT (N PT)COMMON / AREA4/PLTZ! 2* 8 1 I .Q U T PU T ! 2 . 5 0 0 ) . KCCNT DIMENSION 8 0 U N D ( 8 1 ) . S C A L E ! 1 0 ) . D N U M ( 5 )DATA S C A L E / I . . 2 . , 5 . , 1 0 * . 2 3 . . 5 0 . . 7 5 . . I 0 0 . . 2 0 0 . . 5 0 0 . /OATA DASH, S T A R . P L A N K , X L I N E / * - * . « * • , • • * •DATA C N U M / « 0 * . M « . ' 2 * . ' 3 < . " 4 * /DO 7 I N K * 1 , 2 M R I T E ( 6 « 1 2 )PFAX ■ 0 . 0 0 0 0 1 I * I . N P TI F ! A B S I P L T Z ! I N K . I ) ) . G T .P M A X ) P M A X * A B S ( P L T Z < I N K .I >>
1 CONTINUE0 0 2 I * 1 . 1 0I F I P N A X . L E . S C A L E ! I > * 4 . 6 2 5 ) GOTO 3
2 CONTINUE1 * 10
3 RANGE « S C A L E ! I ) / 4 . 0 0 B IG * S C A L E ! I > * 4 . 6 2 5ISCALE » S C A L E ! I I ♦ 0 . 0 0 1JSCALE * ISCALE44KNT « tDO 7 J * 1 . 3 6SMALL * B IG — RANGEBOUND!1 ) * XLINEI F ! J . E 0 . 1 9 ) GOTO 8DO 4 K * 2 . NPT
4 BOUND!K) * BLANK5 0 0 6 K * I . N P T
I F 1 P L T Z ! I N K . K ) . L E .B I G .A N D .P L T Z ! 1 N K .K ) .C T .S M A L L ) B O U N D ! K ) * S T A R6 CONTINUE
KNT * KNT ♦ 1 I F ( K N T . E 0 . 4 ) GOTO 11 M R 1 T E 1 6 . 1 3 ) BOUND
7 B I G * SMALL
251

W R I T E < 6 . I 2 >GOTO 1 5 DO 9 K * 2 * 8 1 BOUNO(K) * DASH KK * 100 10 K * 1*8 It 20 0OUNOCK) * ONUM(KK)KK s KK M GOTO 5MR1TEC 6# 14 ) JSCALE* BOUND KNT * 0JSCALE * JSCALE - I SCALE GOTO 7 RETURN FORMAT C « l * )FORMAT(20X*81 At >F O R M A T ! 1 2 X * I 6 . 2 X . 8 1 A 1 ) END
MUt14

BLOCK OATAREAL JTH DA *JPH I.K PCOMMON / A R E A I / T I *T L *T N *T O *K P * SPJET *T H IL IM .T H 2L IM *
1PH1LIM*PH2LIM*JTHOA*JPHI*BTHOA«BPHI*RAOES*CMILRODATA T 1 *TL • TN • TO
1 / I . • 0 * 5 • 0 . 2 • 0 * 1 5 /DATA KP • S P J E T • THILIM •TH2LIM
1 / 2 0 . . 4 5 0 . • 2 2 * . 2 0 . /DATA PH1LIM •PH2LIM •JTHDA • JPH I
IOATA
1END
/ 6 1 • BTHDA
/ 1 6 .
• 2 0 *• BPHI• t 6 .
• 5 * 0
/
• 3 . 0
203 0 0 0 . 3 0 0 0 .
6 0 0 • 600* 5 0 .3 1 . 4 3 - . 0 2 4 4 9too. 1 0 0 0 . 1 0 .600* 600* 5 0 .5 1 . 4 3 - . 0 2 4 4 9
3000* 3 0 0 0 .500* 3 0 0 . .O10
5 1 . 4 3 - . 0 2 4 4 9100* 1000* 1 0 .500* 5 0 0 . 5 0 .s 1 . 4 5 - . 0 2 4 4 9
3000* 3 0 0 0 .900* 9 0 0 . 5 0 .
5 I . 4 3 - . 0 2 4 4 9too* 1 0 0 0 . 1 0 .9 0 0 . 9 0 0 . SO.
5 1 . 4 5 - . 0 2 4 4 93000* 3 0 0 0 .
1800* 1 8 0 0 . SO.

5 0 * 4 0 6 - • 0 2 4 4 91 0 0 * 1 0 0 0 * 1 0 * • 1 • 5taoo. 1 8 0 0 . 5 0 *5 0 * 4 0 6 - • 0 2 4 4 9
3 0 0 0 . 3 0 0 0 *1 6 0 0 . 1 8 0 0 * SO*5 1 * 1 0 4 - • 0 2 4 4 91 0 0 . 1 0 0 0 * 1 0 * • 1 • S1 8 0 0 . 1 8 0 0 * 5 0 .5 1 * 1 0 4 - . 0 2 4 4 9
roUl

255
VITA
Thomas M. P e r k i n s , J r . , w as b o m o n M arch 9 , 1945 i n
B a to n R ouge , L o u i s i a n a . He i s t h e s o n o f M r. a n d M rs .
Thomas M. P e r k i n s , S r . , o f C l i n t o n , L o u i s i a n a . He a t t e n d e d
e le m e n ta r y a n d s e c o n d a r y s c h o o l i n C l i n t o n , L o u i s i a n a , g r a d u a
t i n g i n J u n e , 1 9 6 3 .
H is u n d e r g r a d u a te w o rk w as d o n e a t L o u i s i a n a S t a t e
U n i v e r s i t y , g r a d u a t i n g w i t h a B a c h e lo r o f S c ie n c e D e g ree i n
c h e m ic a l e n g i n e e r i n g i n J u n e , 1 9 6 7 .
I n S e p te m b e r , 1 9 6 7 , h e m a r r i e d t h e fo rm e r B a r b a r a H a le y
o f B a to n R o u g e , L o u i s i a n a . On A p r i l 1 2 , 1 9 6 9 , h e becam e
t h e p ro u d f a t h e r o f a s o n , W il l ia m M ahoney . I n S e p te m b e r ,
1 9 6 7 , h e e n t e r e d L o u i s i a n a S t a t e U n i v e r s i t y 's g r a d u a t e s c h o o l
a s a f u l l - t i m e s t u d e n t . D u r in g t h i s t im e h e w as c o m m iss io n e d
th r o u g h ROTC a n d s e r v e d o n a c t i v e d u ty i n t h e U n i te d S t a t e s
A rm /. I n A u g u s t , 1 9 7 1 , h e r e c e i v e d a M a s te r o f S c ie n c e D eg ree
i n C h e m ic a l E n g i n e e r i n g . On F e b r u a r y 2 1 , 1 9 7 3 , h e becam e
t h e p ro u d f a t h e r o f a s e c o n d s o n , M ic h a e l Shaw n. C u r r e n t l y
h e i s e m p lo y e d by M e a su re x C o r p o r a t i o n , C u p e r t i n o , C a l i f o r n i a ,
i n t h e a r e a o f d i g i t a l c o n t r o l . He i s now a c a n d i d a t e f o r a
D o c to r o f P h i lo s o p h y i n t h e D e p a r tm e n t o f C h e m ic a l E n g in e e r
i n g .

EXAMINATION AND THESIS REPORT
Candidate:
Major Field:
Title of Thesis:
Thomas Mahoney P e rk in s , J r .
Chemical Engineering
A Math Model o f a H ell Trained Human Operator Performing A Tracking Task
Approved:
airman
f f Dean of the Graduate School
EXAMINING COMMITTEE:
S' /I,
Date of Examination:
March 1, 1974