
sntei.poliupg.ac.idsntei.poliupg.ac.id/prociding_archive/2015/07 SNTEI C.pdfsntei.poliupg.ac.id
72
Prosiding Seminar Nasional Teknik Elektro & Informatika TL03 SNTEI 2015 PNUP, Makassar, 11 Juni 2015 ISBN: 978-602-18168-0-6 143 Penentuan Lokasi dan Kapasitas Distributed Generations Dengan Metode Continuation Power Flow Ardiaty Arief dan Muhammad Bachtiar Nappu Fakultas Teknik, Universitas Hasanuddin email: [email protected], [email protected] Abstrak Perencanaan penempatan maupun kapasitas distributed generations (DG) atau pembangkitan listrik tersebar memerlukan penelitian sistem yang hati-hati dan petunjuk perencanaan yang sesuai. Dalam penelitian ini, metode baru untuk menentukan lokasi dan kapasitas pembangkit listrik tersebar diusulkan. Studi ini mempertimbangkan pengaruh pembangkit listrik tersebar dalam kestabilan tegangan sistem transmisi. Metode yang digunakan adalah metode Continuation Power Flow (CPF). Metode ini menggunakan skema predictor-corrector. Prosedur analisis dimulai dari sebuah hasil yang diketahui, kemudian memprediksi solusi berikutnya untuk nilai parameter beban yang berbeda-beda. Setelah simulasi penempatan pembangkit listrik tersebar di bus tersebut, kestabilan tegangan sistem akan dievaluasi untuk memvalidasi efisiensi dalam peningkatan profil tegangan. Kata Kunci: kestabilan tegangan, metode continuation power flow, tangent vector, distributed generations, pembangkit listrik tersebar. I. PENDAHULUAN Pembangkit listrik tersebar lebih dikenal sebagai distributed generations (DG). Penggunaan pembangkit listrik tersebar telah menjadi lebih popular di beberapa sistem tenaga listrik di dunia ini. Penggunaan pembangkit listrik tersebar adalah pendekatan yang efektif untuk memfasilitasi pemanfaatan energi baru dan terbarukan untuk tujuan pembangkitan tenaga listrik. Bagaimana merencanakan integrasi pembangkit listrik tersebar untuk memanfaatkan sumber energi baru dan terbarukan yang optimal adalah masalah yang sangat penting. Keuntungan sistem yang bisa diperoleh dari pembangkit listrik tersebar sangatlah tergantung pada lokasi penempatan dan ukuran pembangkit listrik tersebar. Oleh karena itu, penelitian untuk menentukan lokasi yang tepat untuk pembangkit listrik tersebar sangatlah penting. Penelitian terdahulu telah membuktikan penempatan pembangkit listrik tersebar yang tidak tepat, kurang efektif dalam meningkatkan kestabilan tegangan dan keandalan sistem serta kurang maksimal dalam menurunkan rugi-rugi daya jaringan [1-4]. Selain itu, pembangkit listrik tersebar dapat membantu dalam mengurangi masalah kongesti saluran transmisi [5-10] yang dapat menyebabkan adanya market power perusahaan pembangkitan [11-13]. Adanya penambahan daya pembangkitan dari DG bisa mencegah ketidakstabilan sistem yang mungkin berakibat pemutusan beban (load shedding) [14-17]. Saat ini, penempatan lokasi pembangkit listrik tersebar yang optimal merupakan salah satu tantangan bagi insinyur sistem tenaga listrik. Bagaimana merencanakan pembangkit listrik tersebar untuk mengoptimalkan penggunaan sumber energi baru dan terbarukan sementara menjaga keandalan dan keamanan sistem adalah hal yang penting. Penelitian ini bertujuan menentukan lokasi (bus) penempatan pembangkit listrik tersebar yang optimal serta kapasitas pembangkitan di setiap lokasi sehingga bisa memaksimalkan kestabilan tegangan sistem. Penelitian ini mengembangkan suatu metode baru untuk menentukan lokasi dan kapasitas pembangkitan listrik tersebar dengan menggunakan metode Continuation Power Flow. Metode Continuation Power Flow mengembangkan skema langkah predictor-corrector untuk
Transcript of sntei.poliupg.ac.idsntei.poliupg.ac.id/prociding_archive/2015/07 SNTEI C.pdfsntei.poliupg.ac.id

Prosiding Seminar Nasional Teknik Elektro & Informatika TL03 SNTEI 2015 PNUP, Makassar, 11 Juni 2015
ISBN: 978-602-18168-0-6 143
Penentuan Lokasi dan Kapasitas Distributed Generations Dengan Metode Continuation Power Flow
Ardiaty Arief dan Muhammad Bachtiar Nappu
Fakultas Teknik, Universitas Hasanuddin email: [email protected], [email protected]
Abstrak
Perencanaan penempatan maupun kapasitas distributed generations (DG) atau pembangkitan listrik tersebar memerlukan penelitian sistem yang hati-hati dan petunjuk perencanaan yang sesuai. Dalam penelitian ini, metode baru untuk menentukan lokasi dan kapasitas pembangkit listrik tersebar diusulkan. Studi ini mempertimbangkan pengaruh pembangkit listrik tersebar dalam kestabilan tegangan sistem transmisi. Metode yang digunakan adalah metode Continuation Power Flow (CPF). Metode ini menggunakan skema predictor-corrector. Prosedur analisis dimulai dari sebuah hasil yang diketahui, kemudian memprediksi solusi berikutnya untuk nilai parameter beban yang berbeda-beda. Setelah simulasi penempatan pembangkit listrik tersebar di bus tersebut, kestabilan tegangan sistem akan dievaluasi untuk memvalidasi efisiensi dalam peningkatan profil tegangan. Kata Kunci: kestabilan tegangan, metode continuation power flow, tangent vector, distributed generations,
pembangkit listrik tersebar.
I. PENDAHULUAN
Pembangkit listrik tersebar lebih dikenal sebagai distributed generations (DG). Penggunaan pembangkit listrik tersebar telah menjadi lebih popular di beberapa sistem tenaga listrik di dunia ini. Penggunaan pembangkit listrik tersebar adalah pendekatan yang efektif untuk memfasilitasi pemanfaatan energi baru dan terbarukan untuk tujuan pembangkitan tenaga listrik. Bagaimana merencanakan integrasi pembangkit listrik tersebar untuk memanfaatkan sumber energi baru dan terbarukan yang optimal adalah masalah yang sangat penting.
Keuntungan sistem yang bisa diperoleh dari pembangkit listrik tersebar sangatlah tergantung pada lokasi penempatan dan ukuran pembangkit listrik tersebar. Oleh karena itu, penelitian untuk menentukan lokasi yang tepat untuk pembangkit listrik tersebar sangatlah penting. Penelitian terdahulu telah membuktikan penempatan pembangkit listrik tersebar yang tidak tepat, kurang efektif dalam meningkatkan kestabilan tegangan dan keandalan sistem serta kurang maksimal dalam menurunkan rugi-rugi daya jaringan [1-4].
Selain itu, pembangkit listrik tersebar dapat membantu dalam mengurangi masalah kongesti saluran transmisi [5-10] yang dapat menyebabkan adanya market power perusahaan pembangkitan [11-13]. Adanya penambahan daya pembangkitan dari DG bisa mencegah ketidakstabilan sistem yang mungkin berakibat pemutusan beban (load shedding) [14-17]. Saat ini, penempatan lokasi pembangkit listrik tersebar yang optimal merupakan salah satu tantangan bagi insinyur sistem tenaga listrik. Bagaimana merencanakan pembangkit listrik tersebar untuk mengoptimalkan penggunaan sumber energi baru dan terbarukan sementara menjaga keandalan dan keamanan sistem adalah hal yang penting.
Penelitian ini bertujuan menentukan lokasi (bus) penempatan pembangkit listrik tersebar yang optimal serta kapasitas pembangkitan di setiap lokasi sehingga bisa memaksimalkan kestabilan tegangan sistem. Penelitian ini mengembangkan suatu metode baru untuk menentukan lokasi dan kapasitas pembangkitan listrik tersebar dengan menggunakan metode Continuation Power Flow. Metode Continuation Power Flow mengembangkan skema langkah predictor-corrector untuk

Prosiding Seminar Nasional Teknik Elektro & Informatika TL03 SNTEI 2015 PNUP, Makassar, 11 Juni 2015
ISBN: 978-602-18168-0-6 144
mendapatkan solusi dari persamaan aliran daya yang direformulasi. Dalam langkah prediction, tangent vector dihitung. Tangent vector memberikan indikasi bus yang lemah dalam sistem.
Struktur makalah ini adalah sebagai berikut. Bagian 2 menjelaskan tentang distributed generations atau pembangkit listrik tersebar. Bagian 3 menjelaskan metode yang diusulkan. Hasil dan analisis disajikan dalam Bagian 4. Bagian 5 menyimpulkan hasil yang diperoleh. II. DISTRIBUTED GENERATIONS
Gambar 1 Jenis pembangkit listrik tersebar dan
teknologinya [18]
Dalam literatur berbahasa Inggris, berbagai macam terminologi dan definisi digunakan untuk pembangkit listrik tersebar atau distributed generations. “Embedded generation” biasanya digunakan di negara-negara Anglo-Amerika. “dispersed generation” digunakan di Amerika Utara, sementara di Eropa dan beberapa negara di Asia menggunakan “decentralized generations”. Selain itu, terdapat pula beberapa definisi untuk pembangkit listrik tersebar. The Electric Power Research Institute mendefinisikan pembangkit listrik tersebar sebagai pembangkitan listrik dari beberapa kilowatts sampai 50 MW’ dan the International Conference on Large High Voltage Electric Systems (CIGRE) mengartikan pembangkit listrik tersebar sebagai pembangkitan antara 50 – 100 MW [19].
Ackermann et al. juga memberi pengertian yang lebih umum dimana pembangkit listrik tersebar adalah sumber tenaga listrik yang terhubung secara langsung ke jaringan distribusi atau sisi konsumen. Pengertian yang hampir sama juga diberikan oleh Ochoa et al., dimana pembangkit listrik tersebar adalah pengembangan sumber tenaga listrik yang terhubung ke jaringan distribusi atau konsumen [20]. El-Khattam dan Salama memberikan klasifikasi pembangkit listrik tersebar berdasarkan teknologinya, dimana secara umum terbagi 2, yaitu: generator tradisional (mesin pembakaran) dan generator non tradisional, dan secara terperinci bisa dilihat di Gambar 1 [18]. III. METODE PENELITIAN
Metode Continuation Power Flow (CPF) adalah salah satu metode analisis kestabilan tegangan quasi-static. Tujuan metode CPF adalah untuk mendapatkan hasil solusi aliran daya yang continue untuk skenario perubahan beban tertentu/spesifik. Metode CPF yang dijelaskan dalam proposal ini adalah pendekatan oleh Ajjarapu dan Christy [21]. Seperti terlihat dalam Gambar 2, prosedur analisa dimulai dari sebuah hasil yang diketahui, kemudian memprediksi solusi berikutnya untuk nilai parameter beban yang berbeda-beda.
Gambar 2 Predictor-corrector scheme of the
continuation power flow [21] Pertama, sebuah parameter beban, dinotasi
𝜑𝜑 didefinisikan sebagai: 0 ≤ 𝜑𝜑 ≤ 𝜑𝜑𝑐𝑐𝑐𝑐𝑐𝑐𝑐𝑐𝑐𝑐𝑐𝑐𝑐𝑐𝑐𝑐
Distributed GenerationTypes and Technologies
Traditional Generators
(Combustion Engines)
Micro Turbine (MT)
Natural Gas Turbine
Simple Cycle,Recuperated Cycle,
Combined Cycle
Non-Traditional Generators
Electromechanical Devices
Fuel Cells (FC)
PEMFCAFC
PAFCMCFCSOFCDMFC
Storage Devices
Batteries
Flywheels
Renewable Devices
Photo Voltaic (PV)
Wind Turbine (WT)
Bus V
olta
ge
Load
Predictor Corrector
Critical Point

Prosiding Seminar Nasional Teknik Elektro & Informatika TL03 SNTEI 2015 PNUP, Makassar, 11 Juni 2015
ISBN: 978-602-18168-0-6 145
dimana 𝜑𝜑 = 0 berhubungan dengan beban dasar dan 𝜑𝜑 = 𝜑𝜑𝑐𝑐𝑐𝑐𝑐𝑐𝑐𝑐𝑐𝑐𝑐𝑐𝑐𝑐𝑐𝑐 berhubungan dengan beban kritis. Parameter beban ini kemudian dimasukkan kedalam persamaan daya aktif dan reaktif, sehingga: 0 = 𝑃𝑃𝐺𝐺𝑐𝑐0(1 + 𝜆𝜆𝑘𝑘𝐺𝐺𝑐𝑐) − 𝑃𝑃𝐿𝐿𝑐𝑐0
− 𝜑𝜑 (𝑘𝑘𝐿𝐿𝑐𝑐 𝑆𝑆Δ𝑏𝑏𝑐𝑐𝑏𝑏𝑏𝑏 cos𝜃𝜃𝑐𝑐) − 𝑃𝑃𝑇𝑇𝑐𝑐 (1)
0 = 𝑄𝑄𝐺𝐺𝑐𝑐0 −𝑄𝑄𝐿𝐿𝑐𝑐0 − 𝜑𝜑 (𝑘𝑘𝐿𝐿𝑐𝑐 𝑆𝑆Δ𝑏𝑏𝑐𝑐𝑏𝑏𝑏𝑏 sin𝜃𝜃𝑐𝑐)− 𝑄𝑄𝑇𝑇𝑐𝑐
(2) Kemudian algoritm kontinu diaplikasikan
pada persamaan aliran daya, dimana 𝐹𝐹 (𝛿𝛿,𝑉𝑉,𝜑𝜑) = 0 (3)
dimana 𝛿𝛿 adalah vektor sudut generator, V adalah vektor magnitude tegangan bus dan 𝜑𝜑 adalah parameter pembebanan.
Metode Continuation Power Flow mengembangkan skema langkah predictor-corrector untuk mendapatkan solusi dari persamaan aliran daya yang direformulasi. Dalam langkah prediction, tangent vector dihitung dengan menurunkan kedua sisi dari persamaan aliran daya. Tangent vector tidak hanya menyediakan informasi mengenai jalan solusi, namun juga analisis sensitivitas untuk menentukan bus yang lemah. Bus yang lemah adalah bus yang memiliki ratio yang besar dari perubahan diferensial tegangan terhadap perubahan diferensial beban. Ratio ini diperoleh dari tangent vector, sehingga Tangent Vector (TV) di bus j bisa dihitung dengan persamaan berikut:
𝑇𝑇𝑉𝑉𝑗𝑗 = 𝑑𝑑𝑉𝑉𝑗𝑗
𝑑𝑑𝑃𝑃𝑐𝑐𝑡𝑡𝑐𝑐𝑐𝑐𝑐𝑐 =
𝑑𝑑𝑉𝑉𝑗𝑗𝐶𝐶𝑑𝑑𝜑𝜑
= max 𝑑𝑑𝑉𝑉1
𝐶𝐶𝑑𝑑𝜑𝜑, 𝑑𝑑𝑉𝑉2
𝐶𝐶𝑑𝑑𝜑𝜑, …
𝑑𝑑𝑉𝑉𝑛𝑛𝐶𝐶𝑑𝑑𝜑𝜑
(4)
IV. HASIL DAN PEMBAHASAN
Gambar 3 IEEE 24-bus Reliability Test Systems [22]
Metode yang diusulkan diuji pada sistem
IEEE 24-bus Reliability Test System (RTS) [22] seperti yang terlihat pada Gambar 3. Bus 13 adalah bus referensi. Tabel 1 menunjukkan data teknis dari unit pembangkit dari IEEE 24-bus RTS.
Untuk kondisi awal, total pembangkit listrik dan beban adalah 3180.866 MW dan 3105 MW. Profil tegangan besarnya ditunjukkan oleh Gambar 4. Garis merah adalah batas kestabilan tegangan yaitu 0,95 pu.
Tabel 1 Data Teknis Unit Pembangkit [22] Unit Bus Pmax (MW) Pmin (MW)
Unit 18 18 400 100 Unit 21 21 400 100 Unit 1 1 152 30.4 Unit 2 2 152 30.4
Unit 15a 15 60 12 Unit 15b 15 155 54.25 Unit 16 16 155 54.25 Unit 23a 23 310 108.5 Unit 23b 23 350 140 Unit 7 7 350 75 Unit 13 13 591 206.85 Unit 22 22 300
Seperti yang dapat dilihat dari Gambar 4,
ada 4 bus yang tegangannya jatuh di bawah batas kestabilan, yaitu: bus 3, 4, 8 dan 9. Dalam

Prosiding Seminar Nasional Teknik Elektro & Informatika TL03 SNTEI 2015 PNUP, Makassar, 11 Juni 2015
ISBN: 978-602-18168-0-6 146
penelitian ini, tangent vector hanya dihitung untuk menguji dampak dari perubahan daya aktif di bus tidak stabil. Penelitian sebelumnya telah membuktikan bahwa bus tidak stabil biasanya berkontribusi paling besar untuk meningkatkan kestabilan dibandingkan dengan bus yang stabil [1-4]. Oleh karena itu hanya tangent vector di bus 3, 4, 8 dan 9 dihitung.
Gambar 4 Profil tegangan sebelum masuknya DG
Gambar 5 menunjukkan tangent vector
untuk menentukan lokasi/bus DG untuk iterasi pertama. Terlihat bahwa bus 4 memiliki TV tertinggi, yaitu 0,026. Bus ini memiliki dampak terbesar pada peningkatan profil tegangan semua bus yang tidak stabil. Untuk setiap iterasi, kapasitas pembangkitan ditetapkan pada 50 MW. Tapi, setelah menambahkan pembangkitan 50 MW di bus 4, tegangan sistem masih tidak stabil. Oleh karena itu, tangent vector dihitung lagi untuk iterasi kedua. Proses ini diulang 6 kali sampai tegangan di semua bus stabil. Tabel 3 menunjukkan bus dengan tangent vector tertinggi untuk setiap iterasi. Jumlah pembangkitan DG berdasarkan perhitungan metode yang diusulkan adalah 300 MW, sekitar 9,5% dari pembangkit listrik keseluruhan, dimana pembangkitan total di bus 4 adalah 150 MW; sementara pembangkitan di bus 3, 8 dan 9 adalah masing-masing 50 MW.
Gambar 5 Nilai Tangent Vector untuk menentukan lokasi
DG
Tabel 2 Bus dengan Tangent Vector Tertinggi Iterasi Bus Total
pembangkitan 1 4 50 MW 2 4 100 MW 3 4 150 MW 4 8 200 MW 5 3 250 MW 6 9 300 MW
Gambar 6 menunjukkan besarnya profil
tegangan sebelum dan sesudah penempatan DG. Setelah adanya pembangkitan tambahan dengan total 300 MW, tegangan pada semua bus menjadi stabil.
Karena ada 4 bus tidak stabil, kami mensimulasikan bagaimana kinerja sistem jika kapasitas pembangkitan DG didistribusikan secara merata diantara empat bus tidak stabil. Gambar 7 menggambarkan perbandingan besarnya tegangan untuk skenario ini dan berdasarkan metode yang diusulkan. Jelas terlihat bahwa profil tegangan berdasarkan rekomendasi dari metode yang diusulkan lebih baik dibandingkan jika pembangkitan dibagi secara merata diantara empat bus yang tidak stabil. Meskipun dengan pembangkitan total yang sama, masih ada beberapa bus dengan tegangan di bawah batas kestabilan tegangan, jika ukuran DG tersebar merata di bus 3, 4, 8 dan 9.
0.86
0.88
0.9
0.92
0.94
0.96
0.98
1
1.02
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24
Volta
ge M
agni
tude
Bus
0.019
0.026
0.014 0.013
TV3 TV4 TV8 TV9

Prosiding Seminar Nasional Teknik Elektro & Informatika TL03 SNTEI 2015 PNUP, Makassar, 11 Juni 2015
ISBN: 978-602-18168-0-6 147
Gambar 6 Profil tegangan sebelum dan setelah adanya DG
Gambar 7 Perbandingan profil tegangan apabila DG
dipasang sesuai metode dan disebar merata
V. KESIMPULAN Penempatan dan kapasitas DG yang tepat
sangatlah penting untuk memaksimalkan manfaat dari DG. Makalah ini mengajukan sebuah metode baru berdasarkan metode continuation power flow (CPF). Metode CPF adalah metode analisis stabilitas tegangan kuasi-statis. Metode ini menggunakan skema predictor-corrector. Pada langkah prediksi, tangent vector dihitung. Tangent vector memberikan informasi mengenai bus yang lemah, yang merupakan bus yang memiliki rasio perubahan diferensial tegangan untuk diferensial perubahan beban yang besar. Sistem IEEE 24-bus RTS digunakan sebagai studi kasus. Penelitian ini hanya berfokus pada peningkatan kestabilan tegangan. Untuk mengevaluasi metode yang diusulkan, kami juga mengamati kinerja sistem ketika pembangkitan DG merata di semua bus lemah. Hasil penelitian menunjukkan efisiensi tangent
vector dalam menentukan alokasi optimal dan ukuran optimal DG untuk setiap lokasi.
REFERENSI
[1] A. Arief, "Advanced Computational Methods for System Voltage Stability Enhancement," School of Information Technology and Electrical Engineering, The University of Queensland, Australia, St. Lucia, Brisbane, 2012.
[2] A. Arief, "Optimal placement of distributed generations with modified P-V Modal Analysis," in 2014 Makassar International Conference on Electrical Engineering and Informatics (MICEEI) Makassar, Indonesia, 26-30 Nov 2014, 2014, pp. 200-204.
[3] A. Arief, Z. Y. Dong, M. B. Nappu, and A. Nizar, "Determination of Optimal DG Allocation with Modal Participation Factor to Enhance Voltage Stability," presented at the The 8th IET International Conference on Advances in Power System Control, Operation and Management (APSCOM) Hong Kong, 8th-11th November, 2009.
[4] A. Arief, M. B. Nappu, M. Gallagher, Z. Y. Dong, and J. Zhao, "Comparison of CPF and Modal Analysis Methods in Determining Effective DG Locations," presented at the The 9th International Power and Energy Conference, Singapore, 27th – 29th October, 2010.
[5] M. Bachtiar Nappu, A. Arief, and R. C. Bansal, "Transmission management for congested power system: A review of concepts, technical challenges and development of a new methodology," Renewable and Sustainable Energy Reviews, vol. 38, pp. 572-580, DOI:10.1016/j.rser.2014.05.089, 2014.
[6] M. B. Nappu, "Locational Marginal Prices Scheme Considering Transmission Congestion and Network Losses," Universal Journal of Electrical and Electronic Engineering, vol. 2, pp. 132-136, DOI: 10.13189/ujeee.2014.020307, 2014.
[7] M. B. Nappu, "LMP-lossless for congested power system based on DC-OPF," in 2014 Makassar International Conference on Electrical Engineering
0.9
0.92
0.94
0.96
0.98
1
1.02
1 3 5 7 9 11 13 15 17 19 21 23
Volta
ge m
agni
tude
BusBefore DG placement After DG placementStability limit
0.92
0.93
0.94
0.95
0.96
0.97
0.98
0.99
1
1.01
1.02
1 3 5 7 9 11 13 15 17 19 21 23
Volta
ge m
agni
tude
(pu)
BusGeneration evenly at 4 busesProposed methodStability limit

Prosiding Seminar Nasional Teknik Elektro & Informatika TL03 SNTEI 2015 PNUP, Makassar, 11 Juni 2015
ISBN: 978-602-18168-0-6 148
and Informatics (MICEEI), Makassar, Indonesia, 26-30 November, 2014, pp. 194-199.
[8] M. B. Nappu, A. Arief, T. K. Saha, and R. C. Bansal, "Investigation of LMP forecasting for congested power systems," in 2012 22nd Australasian Universities Power Engineering Conference (AUPEC), Bali, Indonesia, 26-29 September, 2012, pp. 1-6.
[9] M. B. Nappu and T. K. Saha, "A comprehensive tool for congestion-based nodal price modelling," in 2009 IEEE Power & Energy Society General Meeting (PES GM), Calgary, Alberta, Canada, 26-30 July, 2009, pp. 1-8.
[10] M. B. Nappu and T. K. Saha, "Study on congested power system in competitive electricity market: A proposed methodology," in Conference Proceedings of International Power and Energy Conference, Singapore, 27 - 29 Oct, 2010, pp. 830-835.
[11] M. B. Nappu, R. C. Bansal, and T. K. Saha, "Market power implication on congested power system: A case study of financial withheld strategy," International Journal of Electrical Power & Energy Systems, vol. 47, pp. 408-415, DOI:10.1016/j.ijepes.2012.09.016, 2013.
[12] M. B. Nappu and R. C. Bansal, "Evaluation of GENCO's strategy in creating a congested system for exercising market power," in 2011 IEEE Power and Energy Society General Meeting (PES GM), Detroit, Michigan, USA, 24-28 July, 2011, pp. 1-7.
[13] M. B. Nappu and T. K. Saha, "Financial withheld-based market power within congested power system," in 2011 21st Australasian Universities Power Engineering Conference (AUPEC), Brisbane, Queensland, Australia, 25-28 September, 2011, pp. 1-6.
[14] A. Arief, "Under Voltage Load Shedding Using Trajectory Sensitivity Analysis Considering Dynamic Loads," Universal Journal of Electrical and Electronic Engineering, vol. 2, pp. 118-123, DOI: 10.13189/ujeee.2014.020304, 2014.
[15] A. Arief, Z. Dong, M. B. Nappu, and M. Gallagher, "Under voltage load shedding
in power systems with wind turbine-driven doubly fed induction generators," Electric Power Systems Research, vol. 96, pp. 91-100, DOI:10.1016/j.epsr.2012.10.013, 2013.
[16] A. Arief, M. B. Nappu, Z. Y. Dong, and M. Arief, "Under voltage load shedding incorporating bus participation factor," in Conference Proceedings The 9th International Power and Energy Conference (IPEC), Singapore, 27-29 October, 2010, pp. 561-566.
[17] A. Arief, M. B. Nappu, X. Yin, X. Zhou, and Z. Y. Dong, "Under Voltage Load Shedding Design with Modal Analysis Approach," presented at the The 8th IET International Conference on Advances in Power System Control, Operation and Management, Hongkong, 8-11 November, 2009.
[18] W. El-Khattam and M. M. A. Salama, "Distributed Generation Technologies, Definitions and Benefits," Electric Power Systems Research, vol. 71, pp. 119-128, 2004.
[19] T. Ackermann, G. Andersson, and L. Söder, "Distributed Generation: A Definition," Electric Power Systems Research, vol. 57, pp. 195-204, 2001.
[20] L. F. Ochoa, A. Padilha-Feltrin, and G. P. Harrison, "Evaluating Distributed Generation Impacts With a Multiobjective Index," IEEE Transaction on Power Delivery, vol. 21, pp. 1452-1458, 2006.
[21] V. Ajjarapu and C. Christy, "The Continuation Power Flow: A Tool for Steady State Voltage Stability Analysis," IEEE Transactions on Power Systems, vol. 7, pp. 416-423, 1992.
[22] C. Grigg, P. Wong, P. Albrecht, R. Allan, M. Bhavaraju, R. Billiton, Q. Chen, C. Fong, S. Haddad, S. Kuruganty, W. Li, R. Mukerji, D. Patton, N. Rau, D. Reppen, A. Schneider, M. Shahidehpour, and C. Singh, "The IEEE Reliability Test System - 1996," IEEE Transaction on Power Systems, vol. 14, pp. 1010 - 1020, 1999.

Prosiding Seminar Nasional Teknik Elektro & Informatika SK04 SNTEI 2015 PNUP, Makassar, 11 Juni 2015
ISBN: 978-602-18168-0-6 149
Sistem Pengaturan Tegangan Menggunakan H-Bridge DC Chopper Berbasis Kendali Hybrid PID-Fuzzy
Lutfi1), Mutmainnah2)
1 Mahasiswa Pascasarjana Universitas Hasanuddin (penulis 1) email: [email protected]
2 Dosen Universitas Muhammadiyah Makassar (penulis 2) email: [email protected]
Abstrak
Penelitian ini bertujuan untuk merancang simulasi sistem pengaturan tegangan pada DC-DC Converter menggunakan empat switch mosfet dengan konfigurasi H-Bridge. Sistem pengaturan yang digunakan adalah gabungan dari sistem konvensional PID Controller dengan sistem modern Fuzzy Logic Controller. Metode penelitian bersifat eksperimen melalui pemodelan simulasi merujuk pada teori dan hipotesis terkait parameter komponen yang telah digunakan. Dari hasil simulasi sistem untuk nilai set point 15 volt dengan pengendali Hybrid PID-Fuzzy (Kp=0.5, Ki=0.0002 dan Kd=0.00002) dan sumber beserta beban yang berubah-ubah, diperoleh output tegangan akan overshoot hingga 15.0345 volt kemudian akan mencapai steady state di detik ke 0.003 dengan nilai tegangan rata-rata 14.1776 volt atau error 5.48%
Kata Kunci: Pengaturan Tegangan, Buck-boost Converter, H-Bridge, DC Chopper, Hybrid PID Fuzzy,
I. PENDAHULUAN Kebutuhan terhadap energi listrik akan
terus meningkat seiring dengan peningkatan jumlah penduduk dan standar hidup manusia. Sebagian besar energi listrik saat ini dihasilkan dari pembangkit konvensional yang berbahan bakar fosil. Pembangkit konvensional masih banyak digunakan karena kemampuannya untuk menyuplai listrik secara continue, reliable dan stabil. Walaupun demikian, bahan bakar fosil sudah tidak dapat diandalkan kedepannya karena diprediksi jumlahnya yang sangat terbatas dan terbukti memberikan dampak buruk terhadap lingkungan. Global warming sebagai salah satu dampak negatif penggunaan bakan bakar fosil sebagai sumber energi untuk pembangkit listrik. Oleh karena itu dalam beberapa dekade terakhir ini, pembangkit renewable energi seperti solar cell, wind power, fuel cell, dan sejenisnya telah banyak dikembangkan.
Renewable energy seperti solar cell dan wind power merupakan energi yang tidak akan habis dan tidak memberikan dampak negatif bagi lingkungan. Namun sumber energi ini menghasilkan daya yang fluktuatif karena bergantung pada kondisi alam seperti solar cell
yang bergantung pada sinar matahari dan wind power bergantung pada kecepatan angin. Oleh karena itu, setiap jenis pembangkit renewable energi ini memliki karakteritik arus dan tegangan yang berbeda-beda.
Dengan karakteristik tegangan dan arus yang berbeda-beda, dibutuhkan teknologi DC-DC converter yang mampu menjaga nilai tegangan DC yang konstan dan sesuai dengan level tegangan yang dibutuhkan.
Penelitian ini membahas tentang sistem pengaturan tegangan pada DC-DC Converter menggunakan empat switch mosfet dengan konfigurasi H-Bridge. Sistem pengaturan yang digunakan adalah gabungan dari sistem konvensional PID Controller dengan sistem modern Fuzzy Logic Controller.
Sistem gabungan ini mampu mereduksi nilai error sistem dan menjaga nilai set point walaupun diberikan gangguan berupa sumber tegangan dan beban arus yang berubah-ubah. II. KAJIAN LITERATUR 1) H-Bridge DC Chopper
DC Chopper atau disebut juga dengan DC-DC Converter merupakan rangkaian switching yang befungsi mengubah nilai tegangan Sumber DC ke nilai tegangan DC yang lain.
Prosiding Seminar Nasional Teknik Elektro & Informatika SK04 SNTEI 2015 PNUP, Makassar, 11 Juni 2015
ISBN: 978-602-18168-0-6 150
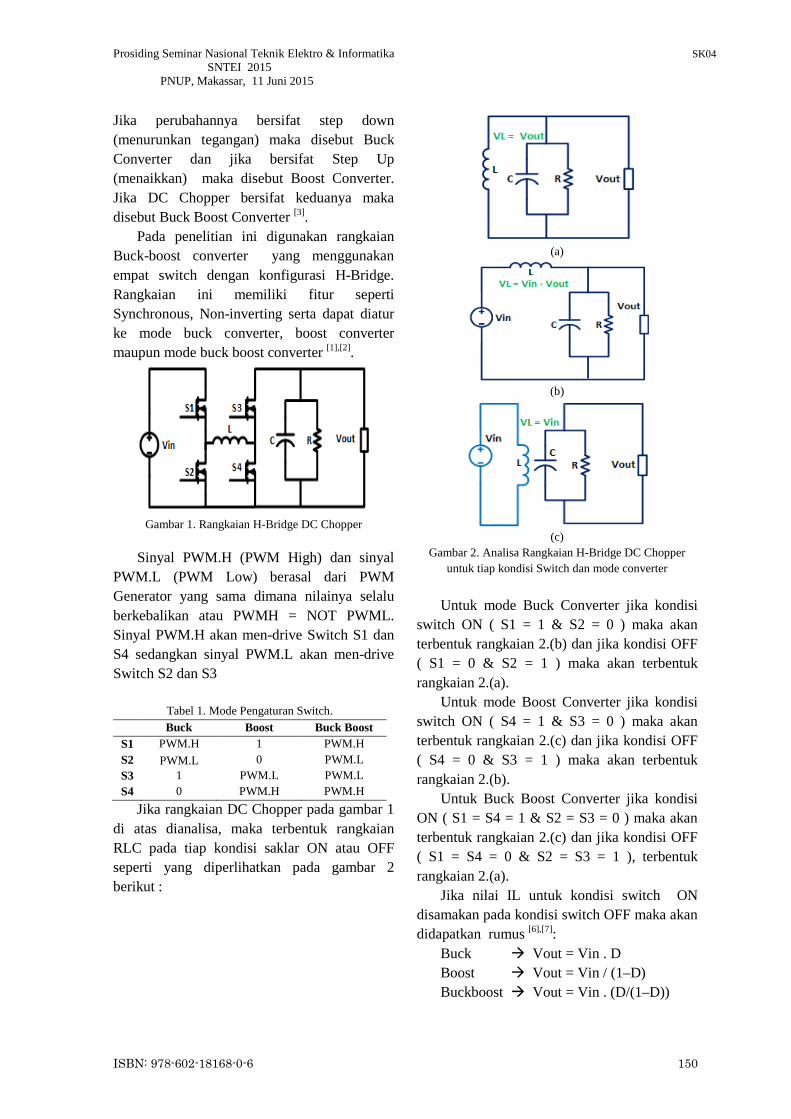
Jika perubahannya bersifat step down (menurunkan tegangan) maka disebut Buck Converter dan jika bersifat Step Up (menaikkan) maka disebut Boost Converter. Jika DC Chopper bersifat keduanya maka disebut Buck Boost Converter [3].
Pada penelitian ini digunakan rangkaian Buck-boost converter yang menggunakan empat switch dengan konfigurasi H-Bridge. Rangkaian ini memiliki fitur seperti Synchronous, Non-inverting serta dapat diatur ke mode buck converter, boost converter maupun mode buck boost converter [1],[2].
Gambar 1. Rangkaian H-Bridge DC Chopper
Sinyal PWM.H (PWM High) dan sinyal
PWM.L (PWM Low) berasal dari PWM Generator yang sama dimana nilainya selalu berkebalikan atau PWMH = NOT PWML. Sinyal PWM.H akan men-drive Switch S1 dan S4 sedangkan sinyal PWM.L akan men-drive Switch S2 dan S3
Tabel 1. Mode Pengaturan Switch. Buck Boost Buck Boost
S1 PWM.H 1 PWM.H S2 PWM.L 0 PWM.L S3 1 PWM.L PWM.L S4 0 PWM.H PWM.H
Jika rangkaian DC Chopper pada gambar 1 di atas dianalisa, maka terbentuk rangkaian RLC pada tiap kondisi saklar ON atau OFF seperti yang diperlihatkan pada gambar 2 berikut :
(a)
(b)
(c)
Gambar 2. Analisa Rangkaian H-Bridge DC Chopper untuk tiap kondisi Switch dan mode converter
Untuk mode Buck Converter jika kondisi
switch ON ( S1 = 1 & S2 = 0 ) maka akan terbentuk rangkaian 2.(b) dan jika kondisi OFF ( S1 = 0 & S2 = 1 ) maka akan terbentuk rangkaian 2.(a).
Untuk mode Boost Converter jika kondisi switch ON ( S4 = 1 & S3 = 0 ) maka akan terbentuk rangkaian 2.(c) dan jika kondisi OFF ( S4 = 0 & S3 = 1 ) maka akan terbentuk rangkaian 2.(b).
Untuk Buck Boost Converter jika kondisi ON ( S1 = S4 = 1 & S2 = S3 = 0 ) maka akan terbentuk rangkaian 2.(c) dan jika kondisi OFF ( S1 = S4 = 0 & S2 = S3 = 1 ), terbentuk rangkaian 2.(a).
Jika nilai IL untuk kondisi switch ON disamakan pada kondisi switch OFF maka akan didapatkan rumus [6],[7]:
Buck Vout = Vin . D Boost Vout = Vin / (1–D) Buckboost Vout = Vin . (D/(1–D))

Prosiding Seminar Nasional Teknik Elektro & Informatika SK04 SNTEI 2015 PNUP, Makassar, 11 Juni 2015
ISBN: 978-602-18168-0-6 151
2). Pembangkit PWM PWM (Pulse Width Modulation) adalah
sinyal pulsa clock dimana nilai Ton dan Toff-nya dapat diatur sesuai kebutuhan. PWM dapat dibangkitkan dengan membandingkan dua sinyal yakni sinyal segitiga dan sinyal DC referensi [4].
Gambar 3. Metode Pembangkitan Sinyal PWM
Perbandingan Ton terhadap nilai periode
sinyal ( Ton + Toff ) disebut juga dengan Duty Cycle (D). Nilai Duty cycle dapat di atur dengan mengatur besar tegangan referensi. 3). Pengendali PID
Di dalam suatu sistem kontrol dikenal adanya beberapa macam aksi kontrol, diantaranya yaitu aksi kontrol proportional (Kp), aksi kontrol integral (Ki) dan aksi kontrol derivative (Kd). Masing-masing dari aksi kontrol, mempunyai keunggulan, dimana aksi dari kontrol proportional mempunyai keunggulan risetime yang cepat, aksi dari kontrol integral mempunyai keunggulan untuk memperkecil error, dan aksi dari kontrol derivative mempunyai keunggulan untuk memperkecil derror (delta error) / meredam overshot / undershot. Untuk itu agar di dapat output dengan risetime yang tinggi serta nilai overshoot dan error yang kecil maka ketiga aksi kontrol tersebut dapat digabungkan menjadi aksi kontrol PID[5],[8].
Tabel 2. Respon PID Controller terhadap perubahan konstanta (Close Loop System)[8]
Rise time Overshoot
Settling time
Steady state error
Kp Decrease Increase Small Change
Decrease
Ki Decrease Increase Increase Eliminate
Kd Small
change Decrease Decrease Small
change
s*Kd s
Ki Kp Gc(s) ++=
Dimana : Kp = Penguatan Proposional Ki = Penguatan Integral Kd = Penguatan Derivatif
3). Pengendali Fuzzy Logic FLC (Fuzzy Logic Controller) merupakan
sistem kendali kalang tertutup (Close Loop) yang menggunakan sistem fuzzy sebagai pengendali reduksi nilai error. FLC merupakan sistem control dengan sistem inferensi atau penalaran dari variabel-variabel fuzzy [9].
Gambar 4. Struktur dasar sistem Inferensi Fuzzy Variabel masukan yang digunakan ada dua
yakni error ( Nilai aktual - Nilai acuan ) dan delta error (error sekarang – error sebelumnya) dimana nilai tegasnya dapat direpresentasikan pada gambar berikut :
Gambar 5. Fungsi Keanggotaan variabel input Error dan Delta Error [9]
Prosiding Seminar Nasional Teknik Elektro & Informatika SK04 SNTEI 2015 PNUP, Makassar, 11 Juni 2015
ISBN: 978-602-18168-0-6 152
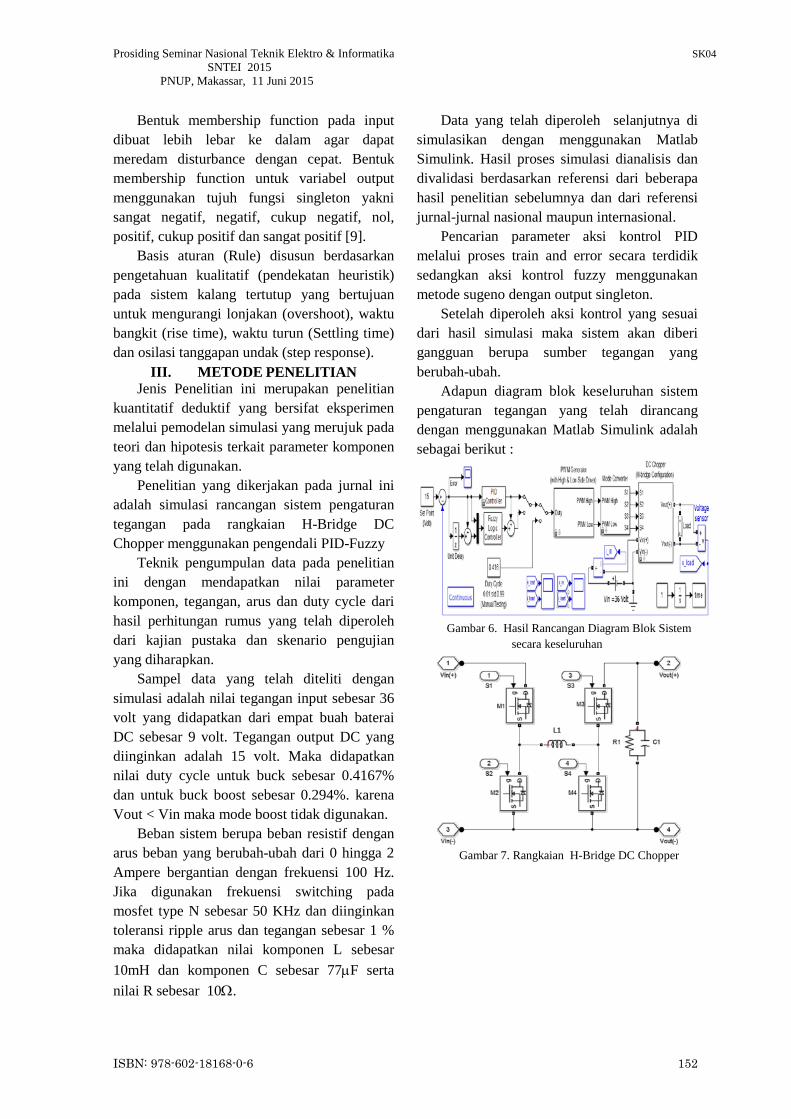
Bentuk membership function pada input dibuat lebih lebar ke dalam agar dapat meredam disturbance dengan cepat. Bentuk membership function untuk variabel output menggunakan tujuh fungsi singleton yakni sangat negatif, negatif, cukup negatif, nol, positif, cukup positif dan sangat positif [9].
Basis aturan (Rule) disusun berdasarkan pengetahuan kualitatif (pendekatan heuristik) pada sistem kalang tertutup yang bertujuan untuk mengurangi lonjakan (overshoot), waktu bangkit (rise time), waktu turun (Settling time) dan osilasi tanggapan undak (step response).
III. METODE PENELITIAN Jenis Penelitian ini merupakan penelitian
kuantitatif deduktif yang bersifat eksperimen melalui pemodelan simulasi yang merujuk pada teori dan hipotesis terkait parameter komponen yang telah digunakan.
Penelitian yang dikerjakan pada jurnal ini adalah simulasi rancangan sistem pengaturan tegangan pada rangkaian H-Bridge DC Chopper menggunakan pengendali PID-Fuzzy
Teknik pengumpulan data pada penelitian ini dengan mendapatkan nilai parameter komponen, tegangan, arus dan duty cycle dari hasil perhitungan rumus yang telah diperoleh dari kajian pustaka dan skenario pengujian yang diharapkan.
Sampel data yang telah diteliti dengan simulasi adalah nilai tegangan input sebesar 36 volt yang didapatkan dari empat buah baterai DC sebesar 9 volt. Tegangan output DC yang diinginkan adalah 15 volt. Maka didapatkan nilai duty cycle untuk buck sebesar 0.4167% dan untuk buck boost sebesar 0.294%. karena Vout < Vin maka mode boost tidak digunakan.
Beban sistem berupa beban resistif dengan arus beban yang berubah-ubah dari 0 hingga 2 Ampere bergantian dengan frekuensi 100 Hz. Jika digunakan frekuensi switching pada mosfet type N sebesar 50 KHz dan diinginkan toleransi ripple arus dan tegangan sebesar 1 % maka didapatkan nilai komponen L sebesar 10mH dan komponen C sebesar 77µF serta nilai R sebesar 10Ω.
Data yang telah diperoleh selanjutnya di simulasikan dengan menggunakan Matlab Simulink. Hasil proses simulasi dianalisis dan divalidasi berdasarkan referensi dari beberapa hasil penelitian sebelumnya dan dari referensi jurnal-jurnal nasional maupun internasional.
Pencarian parameter aksi kontrol PID melalui proses train and error secara terdidik sedangkan aksi kontrol fuzzy menggunakan metode sugeno dengan output singleton.
Setelah diperoleh aksi kontrol yang sesuai dari hasil simulasi maka sistem akan diberi gangguan berupa sumber tegangan yang berubah-ubah.
Adapun diagram blok keseluruhan sistem pengaturan tegangan yang telah dirancang dengan menggunakan Matlab Simulink adalah sebagai berikut :
Gambar 6. Hasil Rancangan Diagram Blok Sistem
secara keseluruhan
Gambar 7. Rangkaian H-Bridge DC Chopper

Prosiding Seminar Nasional Teknik Elektro & Informatika SK04 SNTEI 2015 PNUP, Makassar, 11 Juni 2015
ISBN: 978-602-18168-0-6 153
Gambar 8. Rangkaian PWM Generator / Driver
PWM (toolbox matlab simulink)
Gambar 9. Rangkaian Mode Converter
Gambar 10. Hasil Rancangan PID Controller[5],[8]
Gambar 11. Hasil Rancangan M-File dari FLC [9]
IV. HASIL DAN PEMBAHASAN
Setelah melakukan pembuatan simulasi sistem dengan Matlab Simulink selanjutnya dibuat skenario pengujian untuk mengetahui keandalan sistem yang telah dibangun. 1). Pengujian Manual
Pengujian manual ini dilakukan untuk mengetahui keakuratan rangkaian H-Bridge DC Chopper, PWM Generator dan Mode Converter yang telah dibangun. Untuk Vin sebesar 36V maka untuk Vout 15Volt pada mode buck dibutuhkan duty cycle sebesar 0.4167% dan untuk mode buck boost sebesar 0.294%. selanjutnya untuk mode boost jika output Vout yang diinginkan sebesar 50Volt maka duty cycle seharusnya sebesar 0.28%. pengujian ini dilakukan tanpa beban arus.
Gambar 12. Hasil simulasi pengujian manual untuk
mode buck dengan duty cycle 0.416%
Gambar 13. Hasil simulasi pengujian manual untuk
mode buckboost dengan duty 0.294%

Prosiding Seminar Nasional Teknik Elektro & Informatika SK04 SNTEI 2015 PNUP, Makassar, 11 Juni 2015
ISBN: 978-602-18168-0-6 154
Gambar 14. Hasil simulasi pengujian manual untuk
mode boost dengan duty 0.28%
Dari hasil pengujian manual didapatkan untuk mode buck dengan duty cycle 0.416% didapatkan nilai tegangan akan steady state di tegangan 14.7Volt pada 0.007detik. untuk mode Buck boost dengan duty cycle 0.294% didapatkan nilai tegangan akan steady state di 14.5volt pada 0.006 detik. Sedangkan untuk mode boost dengan nilai duty cycle 0.28% didapatkan nilai tegangan output sebesar 48 Volt di detik 0.006. Selanjutnya dengan menggunakan rumus [8]:
𝐸𝐸𝑐𝑐𝑐𝑐𝑡𝑡𝑐𝑐 = 𝐴𝐴𝑛𝑛𝑐𝑐𝑐𝑐𝑐𝑐𝑐𝑐𝑐𝑐𝑘𝑘 − 𝑆𝑆𝑐𝑐𝑆𝑆𝑆𝑆𝑐𝑐𝑐𝑐𝑛𝑛𝑘𝑘
𝐴𝐴𝑛𝑛𝑐𝑐𝑐𝑐𝑐𝑐𝑐𝑐𝑐𝑐𝑘𝑘 𝑥𝑥 100%
Didapatkan nilai error untuk mode buck sebesar 2%, mode buck boost sebesar 3% dan error untuk mode boost sebesar 4%. 2). Pengujian Sistem Kalang Tertutup
Pada pengujian ini akan digunakan mode buck converter karena memiliki nilai error terkecil. Adapun skenario pengujian pada tahap ini adalah dengan menentukan nilai tegangan output 15Volt sebagai nilai set point dengan kondisi tanpa beban arus dan dengan beban arus 0 dan 2A bergantian dengan frekuensi 100Hz.
Gambar 15. Hasil simulasi pengujian sistem kalang
tertutup tanpa beban arus.
Gambar 16. Hasil simulasi pengujian sistem kalang
tertutup dengan beban arus 0-2A dengan frekuensi 100Hz
Pada gambar 15 terlihat bahwa dengan sistem kendali kalang tertutup maka sistem dapat mencapai kondisi steady state-nya di nilai tegangan 14.5 volt pada detik ke 0.005. namun pada gambar 16, saat sistem diberikan beban arus pulsa 2A 100Hz maka tegangan output akan berosilasi hingga 23 volt saat awal beban naik dan 7 volt saat awal beban turun dan akan berusaha mempertahankan steady state-nya di rentang nilai 14 - 16 volt. 3). Pengujian dengan PID Controller
Salah satu kekurangan PID Controller adalah penyetelan nilai parameter Kp, Ki dan Kd yang masih melalui tahap trial and error. Ziegler-Nichols memperkenalkan dua metode untuk pemilhan nilai Kp, Ki dan Kd yakni metode kurva reaksi dan metode osilasi[5]. Parameter PID yang didapat dari kedua metode tuning, hanyalah nilai rujukan awal agar proses trial and error lebih terarah[8]. Pada pengujian ini akan digunakan nilai parameter PID dengan hasil tuning metode pertama sehingga didapatkan nilai parameter awal yakni nila Kp = 4.292, nilai Ki = 0.0018519 dan nilai Kd = 0.000135. Adapun tegangan output dan arus input yang didapatkan adalah :
Gambar 17. Hasil simulasi pengujian dengan pengendali PID
tanpa beban dengan Kp=4.292, Ki=0.0018519 dan Kd=0.000135 (Tegangan Output)

Prosiding Seminar Nasional Teknik Elektro & Informatika SK04 SNTEI 2015 PNUP, Makassar, 11 Juni 2015
ISBN: 978-602-18168-0-6 155
Jika sistem diberikan beban pulsa arus sebesar 2A dengan 100Hz maka didapatkan output tegangan dan arus input seperti berikut :
Gambar 18. Hasil simulasi pengujian dengan pengendali PID
dengan beban pulsa arus 2A 100 Hz dan nilai Kp=4.292, Ki=0.0018519 dan Kd=0.000135 (Tegangan Output dan Arus Output)
Dari gambar 18 terlihat bahwa tegangan
output akan kembali berosilasi ketika diberi beban yang berubah-ubah sehingga nilai dari parameter PID perlu diperbaiki sesuai dengan kelebihan masing-masing controller.
Aturan dengan pendekatan Ziegler-Nichols memberikan sebuah dugaan yang mendidik untuk nilai parameter dan menunjukkan titik awal yang baik untuk penyetelan. Dengan melihat nilai tegangan output pada gambar 18 maka selanjutnya nilai Kp, Ki dan Kd akan mulai di tuning dengan mengubah satu persatu parameternya sambil melihat kurva outputnya [5],[8].
Setelah mencoba beberapa nilai parameter PID, sistem memberikan hasil yang belum memuaskan sehingga frekuensi kemunculan beban pulsa arus diperkecil menjadi 10 Hz kemudian parameter PID diatur dengan nilai Kp = 0.5, Ki =0.0002 dan Kd=0.00002. Grafik tegangan output yang dihasilkan
Gambar 19. Hasil simulasi pengujian sistem dengan
pengendali PID dengan beban arus = 2A dengan frekuensi kemunculan 10Hz.
Dari gambar 19 terlihat bahwa tegangan output akan mengalami overshoot kemudian beberapa saat akan menuju steady state. Pada kemunculan beban dari 0 ke 2 Ampere, terjadi transient dengan overshoot sebesar 18.8 volt di detik ke 0.0016 dan steady state di 0.01 detik pada rentang tegangan 14.1 dan 14.5 volt. Sedangkan pada kondisi beban dari 2A ke 0A maka akan terjadi overshoot sebesar 21.9 volt di detik ke 0.053 dan akan steady state di 0.062 detik di rentang tegangan antara 14.1 volt dan 14.4 volt. 4). Pengujian dengan Kendali Hybrid
Pada pengujian ini akan dihybridkan hasil pengendalian PID dengan pengendalian Fuzzy. Adapun hasil dari simulasi pengujian dapat diperlihatkan pada gambar berikut :
Gambar 20. Hasil simulasi pengujian sistem dengan
pengendali Hybrid dengan beban arus = 2A frekuensi kemunculan 10Hz
Gambar 21. Hasil simulasi pengujian sistem dengan
pengendali Hybrid (Arus input). Dari gambar 20 terlihat bahwa tegangan
output akan mengalami overshoot kemudian beberapa saat akan menuju steady state. Pada kemunculan beban dari arus 0 ke 2A, terjadi transient dengan overshoot sebesar 18.2 volt di detik ke 0.0015 dan steady state di 0.09 detik pada rentang tegangan 14.1 dan 14.4 volt. Sedangkan pada kondisi beban dari 2A ke 0A maka akan terjadi overshoot sebesar 21.6 volt di detik ke 0.053 dan akan steady state di 0.059 detik di rentang tegangan 14.1 volt dan 14.4 volt.

Prosiding Seminar Nasional Teknik Elektro & Informatika SK04 SNTEI 2015 PNUP, Makassar, 11 Juni 2015
ISBN: 978-602-18168-0-6 156
Gambar 21 memperlihatkan kondisi arus input dimana jika tanpa beban maka arus akan bernilai 1.4 Ampere. Jika sistem diberikan beban arus 2A maka arus input akan naik menjadi 3.4 Ampere.
Dengan membandingkan hasil grafik pada gambar 19 dan gambar 20 dapat dilihat bahwa pengendali hybrid PID-Fuzzy tidak terlalu besar perbedaannya dengan pengendali PID. Kelebihan pengendali Hybrid dapat diamati dari kondisi overshoot yang lebih kecil 0.3 hingga 0.4 volt dan dengan waktu steady state yang lebih cepat 0.0001 detik. 5). Pengujian dengan Sumber dan beban
yang berubah-ubah Pada pengujian ini, sistem akan diberikan
sumber tegangan yang berubah-ubah sebesar 20volt, 36volt, 52volt dan kembali ke 36Volt dengan beban arus yang berubah-ubah sebesar 0A, 1A, 2A dan 1.5A. Untuk waktu perubahan sumber tegangan dan beban arus dapat dilihat dari grafik berikut:
Gambar 22. Waktu perubahan sumber tegangan dan
beban arus.
Tabel 3. Waktu perubahan sumber tegangan input dan arus beban output
Time (Second)
Voltage Source (Volt)
Load Current (Ampere)
0-1 20 0 1-2 36 0 2-3 36 1 3-4 52 1 4-6 52 2 6-10 36 1.5
Selanjutnya sistem akan dijalankan dengan
menggunakan pengendali Hybrid PID-Fuzzy dengan tujuan untuk mereduksi error yang
terjadi akibat gangguan dari perubahan nilai tegangan sumber maupun beban arus.
Gambar 23. Hasil pengujian simulasi tegangan output.
Untuk sumber dan beban berubah-ubah.
Tabel 4. Analisa gambar 23 dari waktu 0 hingga 10 detik
Time Source Load Overshoot Steady state Error
0-1 20V 0A
15.0345 V 0.0019 Sec
13.6328 V 0.006 Sec
9.11%
1-2 36V 0A
14.4706 V 1.0991 Sec
14.1846 V 1.005 Sec 5.44%
2-3 36V 1A
15.3001 V 2.0012 Sec
14.1789 V 2.0027. Sec
5.47%
3-4 52V 1A
14.5610 V 3.0006 Sec
14.3700 V 3.0013 Sec
4.20%
4-6 52V 2A
15.2040 V 4.0009 Sec
14.3648 V 4.0012 Sec
4.23%
6-10 36V 1.5A
15.2239 V 6.0003 Sec
14.1728 V 6.0019 Sec
5.51%
0-10 detik 15.0345 V 14.1776 V
Mean=0.003Sec 5.48%
Dari gambar 23 dan tabel 4 yang terlihat
bahwa sistem akan berusaha stabil walaupun diberi gangguan di sisi input berupa perubahan sumber tegangan maupun di sisi output berupa perubahan arus beban. Dengan kendali hybrid PID-Fuzzy maka sistem regulator tegangan DC menggunakan rangkaian H-bridge DC Chopper akan mengeluarkan sinyal tegangan output dengan overshoot hingga 15.0345 volt kemudian akan mencapai steady state di detik ke 0.003 dengan nilai tegangan rata-rata 14.1776 volt atau error 5.48%.

Prosiding Seminar Nasional Teknik Elektro & Informatika SK04 SNTEI 2015 PNUP, Makassar, 11 Juni 2015
ISBN: 978-602-18168-0-6 157
V. KESIMPULAN Berdasarkan hasil dan pembahasan bahwa
H-bridge DC Chopper dengan kendali Hybrid PID Fuzzy dapat mengatur tegangan output sesuai dengan nilai acuan walaupun diberikan gangguan di sisi sumber maupun beban. Pengendali Hybrid PID Fuzzy memiliki nilai overshoot dan waktu steady state yang lebih baik dari pengendali PID konvensional
UCAPAN TERIMA KASIH Dengan penuh rasa syukur kehadirat Allah
SWT dan tanpa menghilangkan rasa hormat yang mendalam, kami selaku penyusun dan penulis mengucapkan banyak terima kasih kepada pihak- pihak yang telah membantu penulis untuk menyelesaikan Jurnal penelitian ini, penulis mengucapkan terima kasih kepada: • Allah SWT, karena atas rahmat dan
pertolongan-Nya kami bisa mengikuti dan menyusun jurnal penelitian ini. Serta hamba-Nya yang termulia Nabi besar Muhammad SAW.
• Untuk orang tua kami bapak drs. Idris HM. Lamba Yassin, ibu Ir. Rosdiana Mahmud, Ibu Rosmiati Mahmud, bapak Tasman, SE, dan ibu Asrianah yang tidak henti-hentinya mendoakan kesuksesan kami.
• Untuk Trisyuliana Tasman, S.SI., Istri dari Penulis 1 yang senantiasa mendukung dan mencurahkan cinta dan kasih sayangnya.
• Bapak Dr. Ir. Zahir Zainuddin,M.Sc, bapak Dr. Ir. H. Rhiza S. Sadjad, MS. EE., bapak Prof. Dr. Ir. H. Ansar Suyuti, M.T., dan bapak Dr.-Ing. Faizal Arya Samman, S.T.,M.T., serta Seluruh bapak dan ibu Dosen yang telah membimbing dan membekali ilmu kepada penulis selama penulis menempuh pendidikan di UNHAS.
REFERENSI [1] Gaboriault, Mark, “A High Efficiency,
Non-Inverting, Buck-Boost DC-DC Converter” Allegro MicroSystems 115 Northeast Cutoff Worcester, MA 01606 USA
[2] J. K. Shiau, and C. J. Cheng, “Design of a non-inverting synchronous buck-boost DC/DC power converter with moderate power level, Robotics and Computer Integrated Manufacturing”, vol. 26, no. 3, pp. 263-267, June 2010.
[3] Luo, Fang Lin, and Hong Ye, “Essential DC/DC Converters“, Taylor & Francis Group., London New York, 2006
[4] KAZIMIERCZUK, MARIAN K. “Pulse-width Modulated DC–DC Power Converters”, Wiley,Ohio, 2008.
[5] Ogata, Katsuhiko, “TEKNIK KONTROL AUTOMATIK”, Edisi Kedua, Jilid I dan II. Penerbit Erlangga. Jakarta. 1996.
[6] Rashid, Muhammad H, “Power Electronics Handbook Third Edition”, Elsevier.Inc, Florida, 2011.
[7] Rashid, Muhammad H, and Rashid, Hasan M, “SPICE for Power Electronics and Electric Power Second Edition”, Taylor & Francis Group, London New york, 2006.
[8] Thomas Wahyu Dwi Hartanto & Y. Wahyu Agung Prasetyo. “Analisis Dan Desain Sistem Kontrol dengan Matlab”. Penerbit Andi. Yogyakarta. 2003.
[9] Widodo, Thomas sri, “Sistem Neuro Fuzzy”, Graha Ilmu, Yogyakarta, 2005.

Prosiding Seminar Nasional Teknik Elektro & Informatika SK04 SNTEI 2015 PNUP, Makassar, 11 Juni 2015
ISBN: 978-602-18168-0-6 158

Prosiding Seminar Nasional Teknik Elektro & Informatika IT10 SNTEI 2015 PNUP, Makassar, 11 Juni 2015
ISBN: 978-602-18168-0-6 159
Implementasi Teknologi Google Maps API sebagai Alternatif Mengatasi Kemacetan Lalulintas
Marson James Budiman1), Stephy Walukow2) , Herry Makapedua3)
1 Jurusan Teknik Elektro, Program Studi Teknik Komputer, Politeknik Negeri Manado email: [email protected]
2 Progran Studi Teknik Informatika,Laboratorium Teknik Komputer & Informatika email: [email protected]
Abstrak
Penelitian ini bertujuan merancang model pengembangan sistem informasi lalulintas berbasis Google maps Api di Kota Manado, mengintegrasikan informasi lokasi dan data kendaraan akibat kecelakaan laulintas melalui peta lokasi jalan,. Sistem informasi ini menggunakan teknologi Google maps API adalah model aplikasi yang digunakan untuk, mengintegrasikan informasi secara interface dari perangkat sensor ke media komputer yang dilakukan pada sisi pengelola aplikasi maupun sisi pengguna. Hasil perancangan ini berupa titik koordinat peta lokasi dan data kendaraan akibat kondisi kecelakaan lalulintas. Hasil rancangan memberikan output tampilan pada sisi pengguna dan diharapkan sebagai panduan bagi pihak terkait untuk menangani secara cepat, serta bagi pengguna jalan untuk dapat memilih jalur alternatif ketika terjadi kecelakaan yang mengakibatkan kemacetan lalu lintas, sehingga tingkat kemacetan dapat di kurangi. Kata Kunci: Sistem Informasi, kecelakaan lalulintas, titik koordinat I. PENDAHULUAN
Daerah Perkotaan pada umumnya mengalami pembangunan pesat dari semua bidang, salah satu bidang adalah sarana transportasi. Kenyataan diperkotaan terjadi ketidak seimbangan antara tingkat pertumbuhan jalan disatu sisi dengan tingkat pertumbuhan kendaraan disisi lain, dimana pertumbuhan jalan jauh lebih kecil dari pada tingkat pertumbuhan kendaraan, data Dinas Pendapatan Daerah Sulut hingga tahun 2012, di Sulut ketambahan sebanyak 9000 kendaraan roda empat dan 34.000 kendaraan roda dua. Menurut Kadishub Kota Manado Yohanis B. Waworuntu terungkap data bahwa jumlah armada angkutan umum aktif di Kota Manado adalah sebanyak 4.667 kendaraan, dengan jumlah penumpang rata-rata sebanyak 150 penumpang/hari, serta load factor sebesar 60%. Pengguna kendaraan yang tidak mematuhi rambu-rambu lalulintas. Dengan kondisi yang demikian, dapat dipastikan akan terjadi kemacetan lalu-lintas, kenyamanan perjalanan terganggu, kebosanan perjalanan, kelelahan perjalanan, pemborosan waktu dan materi yang kesemuanya menjurus kearah terjadinya pelanggaran dan kecelakaan lalu-lintas. Berdasarkan data dari Ditlantas Polda Sulut, presentasi kecelakaan di usia 15-25 tahun mencapai 77.7 persen sepanjang tahun 2014
Berdasarkan kejadian tersebut, dengan adanya pengembangan teknologi google maps sebagai alternatif mengatasi kemacetan lalu lintas diharapkan dapat memberikan informasi secara cepat kepada pihak terkait dan masyarakat pengguna jalan mengenai daerah-daerah yang macet akibat kondisi lakalantas, ketika melakukan perjalanan, kondisi ini sangat penting dalam meningkatkan kinerja manajemen lalu lintas seperti kepadatan lalu lintas dan info laka lantas.
II. KAJIAN LITERATUR 2.1.kemacetan lalulintas
Kemacetan lalu lintas merupakan suatu keadaan atau situasi yang terjadi dalam satu atau beberapa ruas lalu lintas, dimana arus kendaraan bergerak sangat lambat bahkan terhenti sehingga mengganggu aktifitas dan pergerakan pemakai jalan. Adapun pengertian kemacetan lalu lintas menurut Kamus Besar Bahasa Indonesia yakni keadaan tersendatnya bahkan terhentinya lalu lintas yang disebabkan karena banyaknya jumlah kendaraan yang telah melebihi kapasitas daripada jalan raya. ( Ofyar Z Tamin, 2000:11)
Lalu-lintas tergantung kepada kapasitas

Prosiding Seminar Nasional Teknik Elektro & Informatika IT10 SNTEI 2015 PNUP, Makassar, 11 Juni 2015
ISBN: 978-602-18168-0-6 160
jalan, banyaknya lalu-lintas yang ingin bergerak,tetapi kalau kapasitas jalan tidak dapat menampung, maka lalu-lintas yang ada akan terhambat dan akan mengalir sesuai dengan kapasitas jaringan jalan maksimum, aliran lalu-lintas menjadi tidak stabil sehingga terjadilah tundaan berat, yang disebut dengan kemacetan lalu-lintas (Budi D.Sinulingga, 1999 : 4).
Perkembangan kota-kota di dunia yang begitu pesat, khususnya di negara sedang berkembang, menciptakan aneka
masalah yang belum pernah dihadapi sebelumnya. Degradasi lingkungan, kesumpekan, kemacetan, krisis sosial, kerusuhan, kriminalitas merebak dimana-mana, terutama di kota-kota besar, metropolis, dan megapolis. Muncullah kemudian istilah “hyper-cities” yang juga disebut “macrocephaly” atau kota dengan kepala yang membesar, dengan jumlah penduduk lebih dari 15 juta jiwa, yang sangat tidak sehat (Eko Budihardjo 1997 : 6)
a. Transportasi
Pengertian trasportasi menurut D.Setijowarno & R.B. Frazila (2001: 5) & (Hadihardja, Joetata 1997)adalah memindahkan atau mengangkut dari suatu tempat ke tempat lain. Menurut H.A. Abbas Salim (2000 : 7), definisi trasportasi adalah perpindahan barang atau penumpang dari suatu lokasi ke lokasi lain, dengan produk yang digerakkan atau dipindahkan ke lokasi yang dibutuhkan atau diinginkan. Pengertian transportasi menurut Warpani (1990 : 14) adalah Transportasi disamping sebagai sarana dan prasarana kegiatan yang berfungsi sebagai alat untuk mempermudah dalam pencapaian ke lokasi yang dituju. Menurut Mokhamat Ansor (2000:15) Transportasi jalan diselenggarakan dengan tujuan untuk mewujudkan lalu lintas dan angkutan jalan dengan selamat, aman, cepat, tertib dan teratur, nyaman dan efisien, mampu memadukan moda transportasi lainnya, menjangkau seluruh pelosok wilayah daratan, untuk menunjang pemerataan, pertumbuhan
dan stabilitas sebagai pendorong, penggerak dan penunjang pembangunan nasional dengan biaya terjangkau oleh daya beli masyarakat
b. Traffic Light
Setiap persimpangan harus dipasang suatu sistem pengendalian lalu lintas terpadu (area traffic control/ ATC), sehingga setiap persimpangan yang termasuk didalam daerah yang bersangkutan harus dikendalikan dengan alat pemberi isyarat lalu lintas. (sumber : Menuju Lalu Lintas dan Angkutan Jalan yang Tertib – Direktorat Jenderal Perhubungan Darat, Jakarta, Abu Bakar Iskandar.DKK. 1995 : 1) 2.4.Tinjauan Penelitian Terdahulu: 1). Afrias Sarotama, Mohammad M.Sarinato,
Juniar Ganis, Pusat Pengkajian dan Penerapan Teknologi Informasi dan Elektronika BPPT, Universitas Gunadarma, Proceedings KOMMIT 2002
Judul : Pengembangan Peta Elektronik Interaktif. Hasil ang Diperoleh : Aplikasi peta dasar kota Jakarta sebagai implementasi fitur data jalan yang di input secara manual. Monitoring yang dihasilkan berupa peta lokasi kemacetan.
2).Aries Setijadji, Tesis, Universitas Diponegoro Semarang, 2006
Judul : Studi Kemacetan Lalu Lintas Jalan Kaligawe Kota Semarang.
Hasil yang diperoleh: menganalisis faktor-faktor yang mempengaruhi kemacetan lalu-lintas di Jalan Kaligawe Kota Semarang, sehingga dapat disusun program rencana tindakan yang dapat dilakukan untuk menangani permasalahan kemacetan lalulintas tersebut.
3). Andy A.M. Malik, Jurnal, Universitas Sam Ratulangi Manado , 2011. Judul : Identifikasi kemacetan Lalu lintas di kawasan Paal2 dan Pusat kota manado.
Hasil yang diperoleh : mencari solusi untuk mengatasi permasalahan kemacetan. dengan

Prosiding Seminar Nasional Teknik Elektro & Informatika IT10 SNTEI 2015 PNUP, Makassar, 11 Juni 2015
ISBN: 978-602-18168-0-6 161
mengacu pada perkembangan infrastruktur kota.Marson james Budiman, Zahir
4). Zahinuddin, Amil Ahman Ilham, Jurnal Universitas Hasanuddin, 2012. Judul : Sistem monitoring dan control lalulintas Perkotaan. Hasil yang diperoleh simulasi sinyal input sensor kemacetan dan kerusakan traffic light persimpangan di Kota Makassar.
III. METODE PENELITIAN Pada penelitian ini digunakan pendekatan metode studi literature (library research) dan studi lapangan (field research) untuk perancangan sistem. Pengembangannya dilakukan tahap demi tahap berdasarkan proses kerja sistem. Sugiyono ( 2012:9) mengatakan bahwa “M etode penelitian diartikan sebagai cara ilmiah untuk mendapatkan data dengan tujuan dan kegunaan tertentu”.Sedangkan menurut (w. gulo,2002:10),”Metodologi penelitian adalah cara-cara yang mengatur prosedur penelitian ilmiah pada umumnya, sekaligus pelaksanaannya terhadap masing-masing ilmu secara khusus”.Dari pendapat kedua ahli tersebut dapat disimpulkan bahwa metode ilmiah adalah prosedur secara ilmiah untuk mendapatkan data sehingga memenuhi tujuan penelitian Adapun tahapan penelitian meliputi: a. Tahap diagnosis awal
Pada tahap ini akan dilakukan identifikasi masalah yang ada, agar dapat diantisipasi segala permasalahan yang terkait dengan akan diterapkannya sistem baru. Adapun masalah yang terindentifikasi adalah Bagaimana memantau kemacetan lalu lintas akibat kondisi laka lantas, pada titik lokasi yang berbeda
b. Tahap perencanaan
Pada tahap ini dilakukan penyusunan konsep sistem. Adapun rencana penelitian sebagai berikut : diawali dari survai lapangan, kondisi jalan yang rawan kecelakaan sesuai
dengan tujuan penelitian yang telah ditetapkan. Pada sistem ini akan dibuat sistem informasi pada peta yang memperlihatkan jalur jalan yang mengindikasikan adanya kepadatan kendaraan akibat kondisi laka lantas. Dengan rancangan sistem seperti pada gambar 1.
Gambar 1. Diagram rancangan sistem
Hubungan jaringan setiap parameter Gambar 1 diawali dari input sensor deteksi kecelakaan akan memberikan sinyal ke PC server serta peta lokasi objek, sinyal tersebut diolah menjadi data informasi pada peta lokasi jalan pada sisi client berupa data lokasi kecelakaan dan data kendaraan.
c. Tahap pelaksanaan Di tahap ini dilakukan pembangunan
arsitektur sistem berdasarkan hasil diagnosis analisis kebutuhan sistem, serta Pengujian sistem dengan mengukur kecepatan akses pengguna.
System akan menginformasikan lokasi dan data kendaraan jika terjadi kecelakaan dengan warna berbentuk lingkatan dan garis panjang yang ditampilkan pada titik koordinat peta lokasi. Berikut adalah keterangan arti dari setiap warna jalan.
Tabel.1. Warna yang digunakan pada peta
Keadaan Jalan Warna Gambar Kecelakaan kendaraan
Biru Lingkaran
Keadaan alternative Macet dengan jarak jangkauan dari titik kejadian 100-200m
Merah Garis
INPUT OUTPUT
sensor deteksi
kecelakaan
Tampilan lokasi dan
data kendaraan
PROSES
Desain titik koordinat
Proses Aquisisi
data
Peta Lokasi Objek

Prosiding Seminar Nasional Teknik Elektro & Informatika IT10 SNTEI 2015 PNUP, Makassar, 11 Juni 2015
ISBN: 978-602-18168-0-6 162
IV. HASIL DAN PEMBAHASAN Pada proses antar muka sistem ada
beberapa pilihan yang mendukung proses kerja system. Secara singkat proses ini adalah sebagai berikut: Proses desain titik koordinat (Admin), Proses monitoring (User / Client), Proses report (Admin) Pihak Admin akan menangani Proses Desain, dan Report, sedangkan User atau Client akan berhubungan dengan Proses sistem informasi Adapun Tahapan-tahapan yang dilakukan dalam membangun aplikasi yaitu :
a. Proses desain titik koordinat Adapun tahapan yang di lakukan dalam
penentuan titik koordinat google map untuk menentukan titik lokasi terjadi kecelakaan laulintas, sebagai berikut:
Gambar 2, Penggunaan API Tool Koordinat pada
google map Gambar 2. menggunakan Google Maps Api
V3 Tool Google Maps menyediakan API untuk mendapatkan code javascript dan titik koordinat. Dengan code javascript ini akan dapat menampilkan titik koordinat.
Gambar 3. Tampilan koordinat peta
Gambar 3. Menentukan Koordinat lokasi menampilkan peta koordinat lokasi, dipergunakan untuk menampilkan peta lokasi area penelitian dalam satuan koordinat Latitude dan Longitude. Google Map API merupakan aplikasi interface yang dapat diakses lewat javascript agar Google Map dapat ditampilkan pada halaman web yang sedang dibangun.
b. Pengujian Sistem Pengujian kualitas system adalah salah
satu yang paling penting untuk jaminan kualitas. aplikasi system yang telah diuji merupakan tantangan baru untuk jaminan kualitas dan pengujian. Percobaan dilakukan dengan menjalankan aplikasi-aplikasi client dan data. Aplikasi pada client dinyalakan secara bertahap jumlahnya untuk mengetahui tingkat kecepatan data seiring dengan bertambahnya jumlah user yang online. Tingkat kecepatan dihitung dengan menghitung waktu mulai pengiriman ke penerimaan data. Hasil diperlihatkan pada table 2 dan 3.
var circle = new google.maps.Circle( map: map, center: new google.maps.LatLng(1.477543, 124.845447), fillColor: #0000FF, fillOpacity: 0.6, strokeColor: #FF0000, strokeOpacity: 0.8, strokeWeight: 2 ); circle.setRadius(38.02244377026285);
</style> <scripttype="text/javascript" src= "http://maps.googleapis.com/maps/api/js?data=false"> </script>\ <script type="text/javascript"> function initialize() var myOptions = center: new google.maps.LatLng ( 1.472867, 124.841670), zoom: 14, mapTypeId: google.maps.MapTypeId.ROADMAP ; var map = new google.maps.Map(document.getElementById("map_canvas"), myOptions); </script>

Prosiding Seminar Nasional Teknik Elektro & Informatika IT10 SNTEI 2015 PNUP, Makassar, 11 Juni 2015
ISBN: 978-602-18168-0-6 163
Tabel 2. Hasil Pengujian respon waktu dengan
kecepatan jaringan Upload 250Kbps dan download 1.03Mbps
Jumlah User
Waktu Respons (detik)
Respon titik Koordinat
Kota Manado 1 1.57 1.477543, 124.845447 2 1.62 1.477543, 124.845447 3 1.61 1.477543, 124.845447 4 1.58 1.477543, 124.845447 5 1.59 1.477543, 124.845447 6 1.62 1.477543, 124.845447 7 1.61 1.477543, 124.845447 8 1.62 1.477543, 124.845447 9 1.62 1.477543, 124.845447
Tabel 3. Hasil Pengujian respon waktu dengan
kecepatan jaringan Upload 79Kbps dan download 136Kbps
Jumlah User
Waktu Respons (detik)
Respon titik Koordinat
Kota Manado 1 2.34 1.472867, 124.841670 2 2.35 1.472867, 124.841670 3 2.33 1.472867, 124.841670 4 2.35 1.472867, 124.841670 5 2.35 1.472867, 124.841670 6 2.34 1.472867, 124.841670 7 2.40 1.472867, 124.841670 8 2.36 1.472867, 124.841670 9 2.34 1.472867, 124.841670
• Jumlah User : jumlah user yang
menggunakan aplikasi pada waktu yang bersamaan.
• Waktu Response : Interval waktu yang dihitung dari waktu pengiriman pesan sampai waktu penerimaan pesan.
Sistem informasi sistem adalah memberikan indikasi setiap sinyal yang terdeteksi melalui peta lokasi objek dengan titik koordinat yang ditampilkan pada gambar 4.
Gambar 4. Tampilan koordinat saat terpantau terjadinya kecelakaan.
V. KESIMPULAN
Berdasarkan hasil pengujian aplikasi menunjukan bahwa proses sistem informasi lalu lintas tentang lokasi kecelakaan serta data kendaraan yang terjadi kecelakaan dapat di tampilkan dengan menggunakan media google maps API berdasarkan input sensor yang terdeteksi di setiap kendaraan. Dari hasil pembahasan yang diperoleh dapat disimpulkan: 1. Waktu respon pengiriman sinyal sensor
untuk kecepatan jaringan upload 250Kbps dan download 1.03Mbps rata-rata 1.61 detik. Sedangkan untuk kecepatan upload 250Kbps dan download 1.03Mbps rata-rata 2.35 detik. Ini berarti kecepatan jaringan sangat mempengaruhi komunikasi data
2. Informasi kecelakaan lalulintas disetiap ruas jalan yang sedang berlangsung dapat diperoleh on line 24 jam pada areal titik koordinat yang di tentukan
3. Kesatuan system dibuat secara komputerisasi sehingga menghasilkan data yang cepat, efisien dan akurat
4. Informasi lokasi titik koordinat kejadian dengan tampilan Polyline dan Circle yang berwarna pada ruas jalan.

Prosiding Seminar Nasional Teknik Elektro & Informatika IT10 SNTEI 2015 PNUP, Makassar, 11 Juni 2015
ISBN: 978-602-18168-0-6 164
UCAPAN TERIMA KASIH Pada kesempatan ini Penulis
menyampaikan rasa terima kasih yang sebesar-besarnya dan penghargaan yang setinggi-tingginya kepada : 1. Kepala Pusat Penelitian dan Pengabdian
Kepada Masyaralat Politeknik Negeri Manado beserta Team yang telah memfasilitasi Penelitian, serta selalu mendampingi menjadi Tutor dalam realisai penelitian.
2. Kepala Laboratorium Komputer & Jaringan Jurusan Teknik Elektro yang juga memfasilitasi peralatan menunjang dalam penelitian.
3. Rekan-rekan Team Peneliti yang selalu memberikan masukan dan saran dalam penyusunan realisasi penelitian.
REFERENSI
[1] Abu Bakar Iskandar.DKK. 1995. Menuju Lalu lintas dan Angkutan Jalan yang Tertib. Jakarta. Direktorat Jendral Perhubungan Darat.
[2] ARIES SETIJADJI,STUDI KEMACETAN LALU LINTAS JALAN KALIGAWE KOTA SEMARANG ,Tesis Universitas Diponigoro Semarang
[3] Afrias Sarotama, Mohammad M. Sarinato, Juniar Ganis, Pengembangan Peta Elektronik Interaktif, Proseding KOMMIT 2002
[4] Budi D. Sinulingga, Pembangunan Kota Tinjauan Regional dan Lokal, Penerbit Pustaka Sinar Harapan, 1999
[5] D.Setijowarno & R.B. Frazila , Pengantar Sistem Transportasi, Penerbit Universitas Katolik Soegijapranata Semarang, 2001
[6] Eko Budihardjo, Tata Ruang Kota Perkotaan, Penerbit Alumni, 1997
[7] H.A. Abbas Salim, Manajemen Transportasi , Penerbit PT. Raja Grafindo Persada Jakarta, 1993
[8] Hadihardja, Joetata. DKK. 1997. Sistem Transportasi. Jakarta. Penerbit Guna Darma.
[9] Sugiyono, “Memahami Penelitian Kualitatif”, Bandung , ALFABETA 2012.
[10] W. Gulo, Metodologi Penelitian, Penerbit Grasindo, 2002
[11] Ofyar Z. Tamin, Perencanaan dan pemodelan transportasi, Penerbit
ITB Bandung, 2000 [12] Marson james Budiman, Zahir Zahinuddin, Amil Ahman Ilham, Sistem Monitoring dan Kontrol lalulintas Perkotaan .Jurnal Universitas Hasanuddin, 2012. [13] Andy A.M. Malik, Identifikasi
kemacetan Lalu lintas di kawasan Paal2 dan Pusat kota manado. Universitas Sam Ratulangi Manado , 2011
[14] Warpani.S, Pengelolaan lalau lintas dan angkutan jalan, ITB, Bandung, 2002
[15] Mokhamat Ansori, Mohammad Kanzunnudin, Penerapan Manajemen Lalu Lintas di Bidang perhubungan, STIEPARI, Semarang, 2000

Prosiding Seminar Nasional Teknik Elektro & Informatika IT13 SNTEI 2015 PNUP, Makassar, 11 Juni 2015
ISBN: 978-602-18168-0-6 165
Desain Dan Implementasi Sistem Administrasi Persuratan (Studi Kasus : Sistem Informasi Manajemen PNUP)
Moh Fahril 1), A. Wawan Indrawan2), Rini Nur3)
1,2,3 Jurusan Teknik Elektro, Politeknik Negeri Ujung Pandang email: [email protected], email: [email protected], email: [email protected]
Abstrak Administrasi persuratan internal Politeknik Negeri Ujung Pandang(PNUP), masih menggunakan
sistem konvensional oleh karena itu ditemukan permasalahan seperti mekanisme pada proses persuratan kurang efektif dan efisien, mengalami permasalahan pada proses pencarian, pengarsipan, kontrol serta distribusi surat. Permasalahan tersebut dapat diatasi dengan mengembangkan sistem informasi manajemen persuratan berdasarkan suatu perancangan yang baik.
Penelitian ini merupakan penelitian desain dan implementasi sistem informasi persuratan yang bertujuan untuk merancang dan mengaplikasikan suatu sistem informasi administrasi persuratan internal Politeknik Negeri Ujung Pandang berbasis web. Penelitian ini menggunakan metode FAST (Framework for Application System Technology) sebagai metode tahapan penelitian dan PIECES Framework sebagai alat dalam menganalisis sistem informasi.
Hasil penelitian ini adalah desain dan aplikasi sistem informasi administrasi persuratan yang dapat menjadi dasar pengembangan sistem informasi administrasi persuratan di Politeknik Negeri Ujung Pandang sehingga dapat meningkatkan performance sistem, menyediakan database yang terintegrasi, memudahkan pendistribusian surat, menekan biaya yang dikeluarkan, mudah dalam mengontrol jalannya proses persuratan serta mampu menyediakan informasi yang lengkap dan up to date. Kata Kunci: Sistem Informasi Administrasi Persuratan, FAST, PIECES Framework. I. PENDAHULUAN
Pada proses administrasi persuratan internal Politeknik Negeri Ujung Pandang (selanjutnya disingkat PNUP), sistem masih dilakukan secara konvensional atau manual, sehingga mekanisme pada proses administrasi persuratan tersebut menjadi kurang efektif dan efisien serta memungkinkan adanya permasalahan dalam proses pencarian, pengarsipan, kontrol serta pendistribusian surat.
Permasalahan diatas dapat diatasi dengan mengembangkan sistem informasi manajemen persuratan. Sistem informasi ini menawarkan efisiensi dan optimalisasi proses-proses bisnis pada proses persuratan internal PNUP. Perancangan didasarkan dengan analisis kebutuhan, dimana sampai saat ini masih banyak pengembangan sistem informasi yang belum maksimal dikarenakan sistem tidak sesuai dengan kebutuhan. Akibatnya, sistem yang dikembangkan tidak akan membantu dalam pencapaian sasaran institusi atau perusahaan.
Berdasarkan hal tersebut, penelitian ini dimaksudkan untuk melakukan perancangan
dan pengembangan sistem informasi manajemen persuratan berdasarkan analisis kebutuhan konseptual pada administrasi persuratan internal PNUP sebagai studi kasus. Penulis menggunakan metodologi FAST (Framework for Application System Technology) sebagai metode tahapan penelitian. Kelebihan metode ini adalah merupakan suatu kerangka yang cukup bisa dimengerti, dimana di dalam kerangka tersebut terdapat proyek yang memiliki tipe dan strategi yang berbeda-beda[2]. Untuk mendukung pengembangan sistem informasi tersebut, digunakan kerangka acuan problem solving PIECES (Performance, Information, Economics, Control, Efficiency dan Service). Dari analisis PIECES diperoleh beberapa masalah utama. Hal ini penting karena biasanya yang muncul dipermukaan bukan masalah utama, tetapi hanya gejala dari masalah utama saja[3].
Perancangan sistem menggunakan notasi DFD dan UML sedangkan implementasi pemrograman sistem informasi berbasis web ini
Prosiding Seminar Nasional Teknik Elektro & Informatika IT13 SNTEI 2015 PNUP, Makassar, 11 Juni 2015
ISBN: 978-602-18168-0-6 166
dibangun dengan script PHP serta MYSQL sebagai DBMSnya. II. TEORI PENDUKUNG FAST (Framework For Application System Technology)
FAST merupakan sebuah metodologi yang digunakan untuk mendemonstrasikan proses pengembangan sistem. Adapun kelebihan menggunakan metode FAST ini adalah karena metode inicukup fleksibel untuk menyediakan tipe-tipe berbeda proyek dan strategi[4]. Ada beberapa fase yang terdapat pada metode FAST, yaitu :
1. Fase Definisi Lingkup (Preliminary
Investigation Phase) Fase pertama proses pengembangan FAST.
Tahap ini merupakan tahap awal dalam melakukan analisis pengembangan sebuah sistem. Metode yang digunakan dalam preliminary investigation phase adalah observasi, dan wawancara. 2. Fase Analisis Masalah (Problem Analysis
Phase) Fase ini menyediakan analis dengan
pemahaman, kesempatan, dan atau perintah lebih mendalam yang memicu proyek. Kerangka acuan yang digunakan dalam problem analysis phase adalah kerangka PIECES (Performance, Information, Economy, Control, Efficiency, Services). a. Performance
Peningkatan terhadap kinerja sistem yang baru sehingga menjadi lebih efektif diukur dari jumlah pekerjaan yang dapat dilakukan pada saat tertentu (throughput) dan response time.
b. Information Peningkatan terhadap kualitas informasi
yang disajikan. c. Economy
Peningkatan terhadap manfaat-manfaat atau keuntungan atau penurunan biaya yang terjadi.
d. Control Peningkatan terhadap pengendalian untuk
mendeteksi dan memperbaiki kesalahan derta kecurangan yang akan terjadi.
e. Efficiency Peningkatan terhadap efisiensi operasi.
f. Services
Peningkatan terhadap pelayanan yang diberikan oleh sistem.
3. Fase Analisis Persyaratan (Requirement Analysis Phase) Fase analisis persyaratan menjawab
pertanyaan, ”Apa yang sungguh-sungguh dibutuhkan dan diinginkan oleh pengguna dari sistem yang baru?”. Dalam metodologi lain, fase ini dikenal dengan fase definisi atau fase desain logis. Tools yang digunakan dalam requirement analysis phase adalah diagram use-case. 4. Fase Analisis Keputusan (Decision Analysis
Phase) Tujuan fase analisis keputusan adalah
mengidentifikasi solusi masalah, menganalisa solusi tersebut dan merekomendasikan sebuah system untuk didesain dan diimplementasikan. Tools yang digunakan dalam decision analysis phase adalah matriks dan analisis biaya dan manfaat. 5. Fase Desain Logis (Design Phase)
Fase desain logis lebih lanjut mendokumentasikan persyaratan bisnis dengan menggunakan model sistem yang menggambarkan struktur data, proses bisnis, aliran data, dan antar muka pengguna. Tools yang digunakan dalam design phase adalah Entity Relationship Diagram (ERD), Data Flow Diagram (DFD), State Transition Diagram (STD), dan spesifikasi use-case. 6. Construction Phase
Tujuan pada fase konstruksi dan pengujian adalah, membangun dan menguji sebuahsistem yang memenuhi persyaratan bisnis dan spesifikasi desain fisik, mengimplementasikan antarmuka antara sistem baru dengan sistem yang lama. 7. Implementation Phase
Tahapan ini melakukan implementasi sistem agar sistem dapat beroperasi serta perpindahan sistem secara perlahan.

Prosiding Seminar Nasional Teknik Elektro & Informatika IT13 SNTEI 2015 PNUP, Makassar, 11 Juni 2015
ISBN: 978-602-18168-0-6 167
III. METODE PENELITIAN A. Tahapan penelitian.
Tahapan penelitian yang dilakukan penulis disesuaikan dengan tahapan metodologi FAST, yaitu : 1. Melakukan pengamatan dan pengumpulan
data/informasi pada proses administrasi persuratan meliputi proses bisnis yang sedang berjalan, permasalahan yang dihadapi, waktu pelaksanaan penelitian serta lingkungan yang digunakan dalam proses pengembangan sistem.
2. Menganalisis masalah yang dihadapi, dalam tahapan ini menggunakan kerangka acuan Framework PIECES (Performance, Information, Economy, Control, Efficiency, Services) sebagai problem-solving untuk mengklasifikasikan masalah dari hasil yang di dapat dalam tahap 1.
3. Mengidentifikasi kebutuhan sistem yang akan dibangun dengan menganalisa kebutuhan pengguna.
4. Memberikan solusi dengan menawarkan sebuah sistem untuk di desain, dibangun, dan diimplementasikan.
5. Menggambarkan rancangan sistem yang diusulkan dengan visualisasi dalam bentuk diagram.
6. Membangun sebuah prototipe, pada tahap ini dikembangkan sebuah protipe sistem manajemen persuratan berdasarkan rancangan sistem.
7. Menguji, mendokumentasikan, dan membuat evaluasi sistem untuk menentukan apakah sistem berjalan dengan baik dan benar.
8. Mengoperasikan sistem yang telah dibangun meliputi instalasi sistem sesuai permintaan pengguna.
B. Teknik Pengumpulan Data. 1. Tahapan pengumpulan data
Pada tahap ini terbagi atas dua yaitu studi pustaka dan studi lapangan. a. Studi Pustaka
Studi pustaka merupakan kegiatan yang berkaitan dengan pengkajian terhadap sumber-sumber referensi untuk memperoleh landasan teori, konseptual dan praktis tentang permasalahan penilitian. Studi pustaka ini dilakukan dengan mendapatkan data dari literatur berupa buku dan jurnal.
b. Studi Lapangan
Kegiatan studi lapangan dalam penelitian ini dilakukan melalui pengumpulan data yang berkaitan dengan permasalahan sistem administrasi persuratan. Kegiatan ini merupakan tahapan penelitian yang bertujuan untuk menggali data-data yang dibutuhkan sehubungan dengan sistem informasi yang akan dibangun. Data-data tersebut meliputi data informasi beserta alur proses administrasi persuratan PNUP. Studi lapangan ini meliputi : 1) Observasi atau pengamatan terhadap
proses bisnis administrasi persuratan PNUP, dimana penulis melaksanakan observasi secara langsung.
2) Mempelajari dokumen-dokumen untuk memahami Standar Operasi Proses (SOP) administrasi persuratan PNUP.
3) Wawancara berupa tanya jawab maupun diskusi dengan staff & pimpinan unit terkait dalam proses adminstrasi persuratan PNUP.
C. Teknik Analisis Data.
Untuk analisis data, penulis menggunaka Framework PIECES (Performance, Information, Economy, Control, Efficiency, Services). Adapun pengertian dari analisis pieces sebagai berikut [3] : 1. Performance
Kemampuan sistem dalam menyelesaikan tugas dengan cepat sehingga sasaran dapat segera tercapai. 2. Information
Informasi merupakan hal penting karena dengan informasi tersebut pihak pengguna dapat melakukan langkah selanjutnya. 3. Economy
Pemanfaatan biaya yang digunakan dari pemanfaatan informasi. 4. Control
Analisis control ini digunakan untuk membandingkan sistem yang dianalisa berdasarkan pada segi ketepatan waktu, kemudahan akses, dan ketelitian data yang diproses. 5. Efficiency
Efisiensi berhubungan dengan bagaimana sumber tersebut dapat digunakan secara optimal. 6. Service

Prosiding Seminar Nasional Teknik Elektro & Informatika IT13 SNTEI 2015 PNUP, Makassar, 11 Juni 2015
ISBN: 978-602-18168-0-6 168
Peningkatan pelayanan memperlihatkan kategori yang beragam. Proyek yang dipilih merupakan peningkatan pelayanan yang lebih baik. IV. HASIL DAN PEMBAHASAN
Hasil dan pembahasan penelitian akan dijabarkan sesuai dengan metodologi analisis yang digunakan untuk mendesain dan mengimplementasikan sistem informasi administrasi persuratan. A. Definisi Lingkup 1. Profil singkat
PNUP sebagai lembaga pendidikan tinggi vokasi di Makassar yang memiliki peran strategis dalam mendukung keberadaan provinsi Sulawesi Selatan sebagai pusat layanan pendidikan. Untuk melaksanakan visi misi kampus terdapat berbagai kegiatan administrasi yang mendukung salah satunya adalah kegiatan administrasi persuratan. Administrasi persuratan merupakan pendukung dari kegiatan institusi dimana memiliki peranan penting dalam penyampaian informasi yang tidak langsung.
Kegiatan ini dilakukan dengan melibatkan pegawai yang tergabung dalam bagian-bagian seperti tatausaha, jurusan, dan unit fungsional yang lain.
2. Proses Bisnis Sistem Yang Berjalan
Ada beberapa jenis surat yang terdapat dalam proses bisnis yaitu : a. Surat usulan/permohonan meliputi usulan
kepanitiaan, usulan pelatihan, usulan walikelas, usulan sk, usulan surat tugas (SPPD), permohonan izin, permohonan peminjaman, dan permohonan pengadaan peralatan.
b. Laporan meliputi laporan hasil kegiatan, laporan keuangan, dan laporan hasil rapat.
c. Surat Tanggapan meliputi surat keputusan, surat tugas (SPPD), dan surat izin.
Proses administrasi persuratan pada sistem yang berjalan terdiri atas pengusulan, pembuatan surat, disposisi surat, pengesahan, pengarsipan, pendistribusian surat dan pelaporan.
3. Permasalahan Berdasarkan analisis proses bisnis yang
berjalan ditemukan permasalahan secara garis besar sebagai berikut :
a. Mekanisme pada proses persuratan kurang efisien dan efektif karena masih menggunakan cara konvensional.
b. Mengalami permasalahan dalam proses pencarian, pengarsipan, pemantauan, kontrol serta distribusi surat.
B. Analisa Permasalahan Dari permasalahan diatas dilakukan analisis
permasalahan menggunakan PIECES Framework.
1. Performance
a. Proses administrasi persuratan cenderung membutuhkan waktu yang lama dan proses yang panjang dikarenakan sistem yang masih manual.
b. Tiap unit mengalami permasalahan dalam pendistribusian surat dimana terdapat potensi surat yang tidak sampai ke tujuan, sampai namun tidak tepat waktu, hilang dan sebagainya.
2. Information a. Proses pencarian surat serta informasi
mengenai perihal surat memakan waktu lama karena dokumen surat belum disimpan dan diarsipkan dengan baik.
b. Belum ada database yang terintegrasi untuk menyimpan data persuratan.
3. Economy a. Adanya biaya lebih yang dikeluarkan pada
proses administrasi persuratan hal ini dikarenakan sistem persuratan masih menggunakan kertas.
4. Control a. Prosedur birokratis memperlambat sistem. b. Belum terdapat kontrol pada pengarsipan
surat mengakibatkan kesulitan pada proses pencarian.
c. Belum adanya mekanisme pemantauan proses pendistribusian surat.
5. Efficiency a. Proses persuratan masih menggunakan
sistem manual sehingga keseluruhan proses persuratan masih dapat ditingkatkan efisiensinya.

Prosiding Seminar Nasional Teknik Elektro & Informatika IT13 SNTEI 2015 PNUP, Makassar, 11 Juni 2015
ISBN: 978-602-18168-0-6 169
6. Services a. Sistem belum fleksibel karena belum
mempunyai sistem persuratan yang terkomputerisasi.
b. Perlunya fitur baru sistem kontrol proses persuratan agar mempermudah unit untuk melakukan pemantauan pada proses distribusi surat.
C. Analisa Kebutuhan. Dari berbagai identifikasi masalah yang
dibahas di atas, maka dapat disimpulkan bahwa perlu adanya digitalisasi proses dengan cara membangun suatu sistem informasi administrasi persuratan sebagai pengganti atau pendamping sistem manual sehingga proses tersebut bisa lebih efisien dan efektif.
Secara umum alur proses sistem yang akan dibangun tetap sama dengan sistem lama, hanya pada tahapan distribusi surat, dapat dipersingkat prosesnya dengan mekanisme distribusi surat secara langsung. Untuk menganalisa kebutuhan sistem yang akan dibangun. Penulis menggunakan Table Functional Requirement dan Table Non Functional Requirement sebagai berikut : Tabel 1 Functional Requirement
Functional Requirement 1. Sistem menyediakan fasilitas pengiriman surat
dari unit secara sistematis. 2. Sistem menyediakan fasilitas cek surat masuk. 3. Sistem menyediakan fasilitas untuk proses
disposisi serta intruksi oleh pimpinan. 4. Sistem mampu menyimpan data arsip dengan
baik. 5. Sistem mampu memberikan informasi yang
efektif. 6. Sistem menyediakan fasilitas pemantauan proses
persuratan. 7. Sistem dapat mendistribusikan surat secara efisien
dan efektif. 8. Sistem mampu berjalan dan memudahkan
pengguna pada kegiatan administrasi persuratan. Tabel 2 Non Functional Requirement
Non Functional Requirement Tipe Kebutuhan Penjelasan Performance Memiliki response time
yang cepat Information Informasi yang ditampilkan
akurat dan uptodate. Economy Sistem dapat menekan
biaya. Control and Security 1. Sistem harus dapat
melakukan kontrol terhadap hak akses setiap user.
2. Sistem harus dapat
melakukan control untuk data yang tersimpan.
3. Sistem harus dapat melakukan kontrol pada penyediaan informasi yang diberikan.
4. Sistem membutuhkan back-up untuk semua data.
Efficiency Penggunaan sistem dapat mendorong efisiensi waktu pemrosesan data.
Service 1. Sistem harus mudah digunakan (user friendly)
2. Sistem yang rapi dan terstruktur.
3. Sistem harus dapat meminimalisir human error
4. Sistem harus dapat digunakan pada proses administrasi persuratan PNUP.
D. Analisa Keputusan.
Sesuai dengan kebutuhan sistem, maka proses ini dibuat agar siklus alur kerja dari pembuatan sistem persuratan ini dapat diterima dan dimengerti oleh pengguna sistem.
Ada beberapa bagian yang terkait dalam menjalankan sistem informasi persuratan ini, diantaranya Unit Fungsional/Jurusan, Unit Tata Usaha dan pimpinan. Adapun alur sistem dapat dijelaskan sebagai berikut : 1. Persuratan SK, SPPD (perihal usulan).
a. Input dan pengiriman surat usulan dilakukan oleh unit fungsional atau jurusan yang membutuhkan.
b. Unit tatausaha menerima surat usulan kemudian melakukan disposisi kepada pimpinan berdasarkan perihal surat.
c. Disposisi pada pimpinan melibatkan Direktur dan Pembantu Diretur disesuaikan dengan perihal dan kebutuhan surat.
d. Pimpinan memberikan intruksi kepada unit tatausaha terkait dengan perihal usulan.
e. Unit tatausaha menanggapi intruksi pimpinan, dalam hal ini menerbitkan surat tanggapan berupa SK atau SPPD yang terarsip pada sistem surat keluar.
f. Pimpinan melakukan pengesahan pada surat keluar yang telah dibuat unit tatausaha.

Prosiding Seminar Nasional Teknik Elektro & Informatika IT13 SNTEI 2015 PNUP, Makassar, 11 Juni 2015
ISBN: 978-602-18168-0-6 170
g. Surat akan dikirim kepada yang bersangkutan oleh unit tatausaha berdasarkan perihal surat.
h. User penerima surat melaporkan bahwa surat telah diterima.
i. Pada persuratan ini terdapat dua kondisi yaitu usulan diterima dan usulan ditolak.
2. Persuratan SK, SPPD (perihal langsung). a. Pimpinan memberikan intruksi langsung
kepada unit tatausaha untuk pembuatan SK atau SPPD.
b. Unit tatausaha menanggapi intruksi pimpinan.
c. Pimpinan melakukan pengesahan pada surat keluar yang telah dibuat unit tatausaha.
d. Surat akan dikirim kepada yang bersangkutan oleh unit tatausaha berdasarkan perihal surat.
e. User penerima surat melaporkan bahwa surat telah diterima.
3. Persuratan undangan. a. Pimpinan memberikan intruksi langsung
kepada unit tatausaha perihal pembuatan undangan.
b. Unit tatausaha menanggapi intruksi pimpinan.
c. Pimpinan melakukan pengesahan pada surat keluar yang telah dibuat unit tatausaha.
d. Surat akan dikirim kepada yang bersangkutan oleh unit tatausaha berdasarkan perihal surat.
e. User penerima surat melaporkan bahwa surat telah diterima.
4. Persuratan laporan. a. Input dan pengiriman laporan dilakukan
oleh unit atau jurusan. b. Unit tatausaha menerima laporan berupa
surat masuk kemudian melakukan disposisi kepada pimpinan.
c. Disposisi pada pimpinan melibatkan Direktur dan Pembantu Diretur disesuaikan dengan perihal dan kebutuhan surat.
d. Pimpinan memberikan tanggapan terkait dengan laporan unit fungsional atau jurusan.
e. Unit tatausaha melihat tanggapan pimpinan dalam hal ini Unit fungsional atau jurusan dapat melihat tanggapan pimpinan perihal surat laporan yang dikirim.
Setelah mengajukan sistem yang diusulkan, maka adapun perbandingan antara sistem yang berjalan dengan sistem yang diusulkan. 1) Kelemahan sistem yang berjalan :
a) Proses membutuhkan waktu yang lama dan proses yang panjang dikarenakan sistem yang masih manual.
b) Dokumen-dokumen surat belum diarsipkan dengan baik karena belum adanya database yang terintegrasi.
c) Adanya biaya lebih yang dikeluarkan pada proses administrasi persuratan hal ini dikarenakan sistem persuratan masih menggunakan kertas.
d) Kesulitan pada proses pendistribusian surat karena sistem masih mengandalkan Sumber Daya Manusia.
2) Keunggulan sistem yang diusulkan : a) Proses semakin cepat karena sudah
terkomputerisasi. b) Unit fungsional atau Jurusan dapat
mengontrol status surat. c) Tersedia database yang terintegrasi untuk
pengarsipan data persuratan sehingga data terklarifikasi dengan baik dan mempermudah pada proses pencarian.
d) Meminimalisir biaya yang dikeluarkan karena sistem sudah terdigitalisasi.
e) Memudahkan dalam pendistribusian surat karena sistem sudah terkomputerisasi.
E. Desain.
Sistem yang diusulkan tersebut dapat dijelaskan dalam Visualisai diagram dengan tools seperti Data Flow Diagram, Unified Modeling Languange (UML Diagram) dan Entity Relation Diagram (ERD). 1. Data Flow Diagram
Gambar 1. Diagram Konteks SIP.

Prosiding Seminar Nasional Teknik Elektro & Informatika IT13 SNTEI 2015 PNUP, Makassar, 11 Juni 2015
ISBN: 978-602-18168-0-6 171
Gambar 2. DFD Level 0 SIP.
Gambar 3. DFD Level 1 Persuratan SK, SPPD
(Perihal Usulan Diterima).
Gambar 4. DFD Level 1 Persuratan SK, SPPD
(Usulan Ditolak).
Gambar 5. DFD level 1 persuratan SK, SPPD
(Perihal Langsung).
Gambar 6. DFD Level 1 Persuratan Undangan.
Gambar 7. DFD Level 1 Persuratan Laporan.
2. Unified Modeling Languange

Prosiding Seminar Nasional Teknik Elektro & Informatika IT13 SNTEI 2015 PNUP, Makassar, 11 Juni 2015
ISBN: 978-602-18168-0-6 172
Gambar 8. Use Case Diagram SIP.
Gambar 9. Activity Diagram Persuratan
SK/SPPD Perihal Usulan.
Gambar 10. Activity Diagram Persuratan
SK/SPPD Perihal Langsung.
Gambar 11. Activity Diagram Persuratan Undangan.
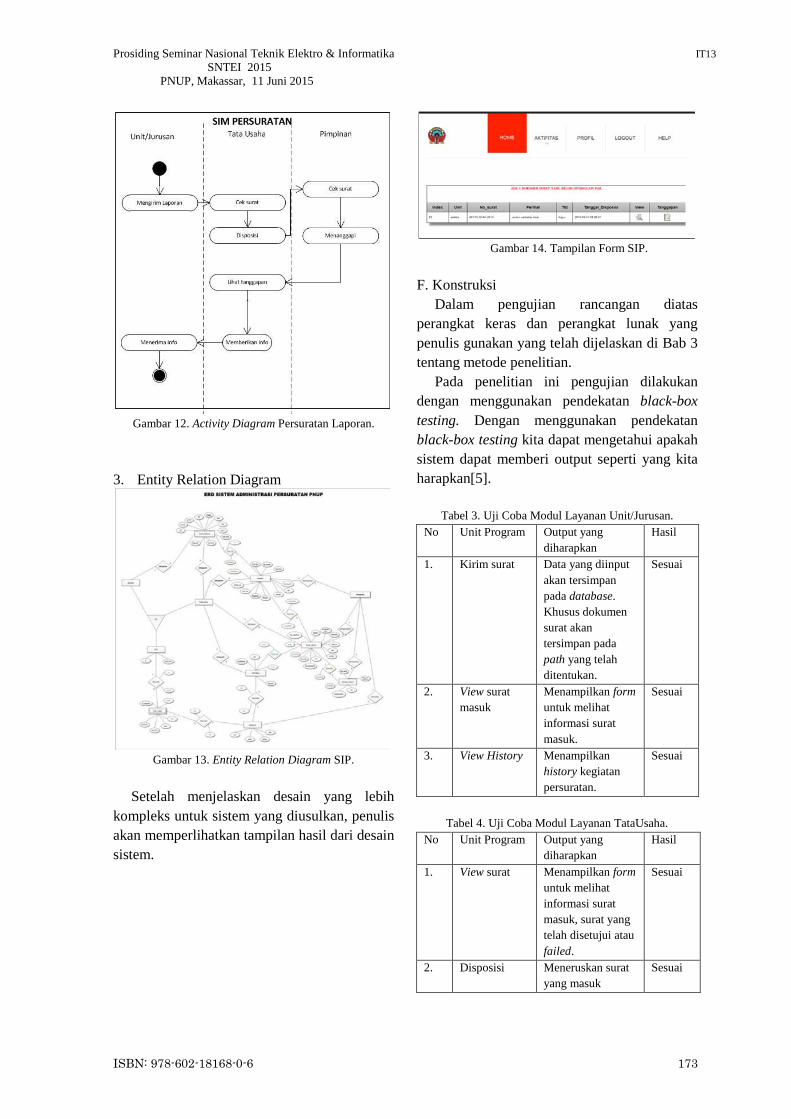
Prosiding Seminar Nasional Teknik Elektro & Informatika IT13 SNTEI 2015 PNUP, Makassar, 11 Juni 2015
ISBN: 978-602-18168-0-6 173
Gambar 12. Activity Diagram Persuratan Laporan.
3. Entity Relation Diagram
Gambar 13. Entity Relation Diagram SIP.
Setelah menjelaskan desain yang lebih
kompleks untuk sistem yang diusulkan, penulis akan memperlihatkan tampilan hasil dari desain sistem.
Gambar 14. Tampilan Form SIP.
F. Konstruksi
Dalam pengujian rancangan diatas perangkat keras dan perangkat lunak yang penulis gunakan yang telah dijelaskan di Bab 3 tentang metode penelitian.
Pada penelitian ini pengujian dilakukan dengan menggunakan pendekatan black-box testing. Dengan menggunakan pendekatan black-box testing kita dapat mengetahui apakah sistem dapat memberi output seperti yang kita harapkan[5].
Tabel 3. Uji Coba Modul Layanan Unit/Jurusan.
No Unit Program Output yang diharapkan
Hasil
1. Kirim surat Data yang diinput akan tersimpan pada database. Khusus dokumen surat akan tersimpan pada path yang telah ditentukan.
Sesuai
2. View surat masuk
Menampilkan form untuk melihat informasi surat masuk.
Sesuai
3. View History Menampilkan history kegiatan persuratan.
Sesuai
Tabel 4. Uji Coba Modul Layanan TataUsaha.
No Unit Program Output yang diharapkan
Hasil
1. View surat Menampilkan form untuk melihat informasi surat masuk, surat yang telah disetujui atau failed.
Sesuai
2. Disposisi Meneruskan surat yang masuk
Sesuai

Prosiding Seminar Nasional Teknik Elektro & Informatika IT13 SNTEI 2015 PNUP, Makassar, 11 Juni 2015
ISBN: 978-602-18168-0-6 174
perihal usulan dari unit atau jurusan.
3. View intruksi pimpinan
Form untuk melihat intruksi pimpinan.
Sesuai
4. Terbitkan surat
Data yang diinput akan tersimpan pada database.
Sesuai
5. Distribusi surat
Melakukan distribusi surat berdasarkan tujuan surat.
Sesuai
Tabel 5. Uji Coba Modul Layanan Pimpinan.
No Unit Program Output yang diharapkan
Hasil
1. View surat disposisi
Form untuk melihat informasi surat disposisi
Sesuai
2. Input intruksi Pimpinan dapat memberi intruksi, data akan tersimpan pada database.
Sesuai
3. Pengesahan Pimpinan dapat mengesahkan surat disposisi
Sesuai
Tabel 6. Uji Coba Modul Layanan Pegawai/Dosen.
No Unit Program Output yang diharapkan
Hasil
1. View surat masuk
Form untuk melihat informasi surat masuk
Sesuai
2. Report Sistem akan memberi notifikasi pada surat yang telah dibaca
Sesuai
G. Implementasi.
Implementasi sistem akan dilakukan setelah disetujui oleh pihak pengguna. V. KESIMPULAN
Dari pembahasan yang telah diuraikan maka penulis mencoba membuat kesimpulan bahwa dengan perancangan dan pengembangan sistem informasi administrasi persuratan yang dikembangkan dapat menjawab solusi dari permasalahan yang dihadapi, seperti : 1. Proses semakin cepat karena sistem sudah
terkomputerisasi.
2. Sistem menyediakan database yang terintegrasi.
3. Sisten dapat menekan biaya yang dikeluarkan pada proses adminstrasi persuratan PNUP.
4. Sistem dapat mengontrol jalannya proses adminstrasi persuratan PNUP sesuai dengan standarisasi.
5. Sistem memudahkan pada proses distribusi surat.
6. Sistem mampu menyediakan informasi yang lengkap dan up to date. Semua hal tersebut menjawab permasalahan yang dihadapi sehingga dapat meningkatkan performansi sistem administrasi persuratan PNUP.
REFERENSI [1] Tjuk Suwarso, 2004. Manajemen Basis
Data Elektronik Untuk Perpustakaan Atau Pusat Dokumentasi Dan Informasi. Visi Pustaka[Internet]. Volume 6 Edisi 2. Tersedia pada:http://www.pnri.go.id/ Majalah OnlineAdd.aspx. Diunduh pada 7 Agustus 2013.
[2] D.J, Irfan, September 2011, "Sistem Informasi Rumah Sakit Dr.AK.Gani Palembang". Jurnal Teknologi dan Informatika(TEKNOMATIKA). Volume1,No.3,http://news.palcomtech.com/wpconten/uploads/2012/01/IRFANTE01032011.pdf, 18November 2013.
[3] Al fatta, Hanif, 2007, Analisis dan perancangan sistem informasi untuk keunggulan perusahaan dan organisasi kelas dunia, Andi offset – STMIK AMIKOM , Yogyakarta.
[4] Pahlevi, Agung & Layasari, Dian. 2011. ANALISIS DAN PERANCANGAN SISTEM INFORMASI E-BUSINESS BERBASIS WEB PADA CV. PERMATA INTI KONSTRUKSI., Skripsi, STMIK GI MDP.
[5] Nurhayati. 2011. Pengembangan Sistem Informasi Layanan Persuratan (Studi Kasus : Kantor Kelurahan Bambu Apus). Skripsi, Universitas Islam Negeri Syarif Hidayatullah.

Prosiding Seminar Nasional Teknik Elektro & Informatika TEL17 SNTEI 2015 PNUP, Makassar, 11 Juni 2015
ISBN: 978-602-18168-0-6 175
Estimasi Kanal Akustik Bawah Air Untuk Perairan Dangkal Menggunakan Metode Least Square dan Minimum Mean Square
Mardawia M. Parenreng1), Wirawan2), Tri Budi Santoso3)
1 Teknik Multimedia dan Jaringan, Politeknik Negeri Ujung Pandang email: [email protected]
2 Institut Teknologi Sepuluh Nopember, ITS email: [email protected]
3 Politeknik Elektronika Negeri Surabaya, PENS email: [email protected]
Abstrak
Dalam beberapa tahun terakhir, sistem komunikasi akustik bawah air banyak
dikembangkan oleh beberapa peneliti. Besarnya tantangan yang dihadapi membuat para peneliti semakin tertarik untuk mengembangkan penelitian dibidang ini. Kanal bawah air merupakan media komunikasi yang sulit karena adanya attenuasi, absorption, dan multipath yang disebabkan oleh gerakan gelombang air setiap saat. Untuk perairan dangkal, multipath disebabkan adanya pantulan dari permukaan dan dasar laut. Kebutuhan pengiriman data cepat dengan bandwidth terbatas menjadikan Ortogonal Frequency Division Multiplexing (OFDM) sebagai solusi untuk komunikasi transmisi tinggi dengan modulasi menggunakan Binary Phase-Shift Keying (BPSK). Estimasi kanal bertujuan untuk mengetahui karakteristik respon impuls kanal propagasi dengan mengirimkan pilot simbol. Pada estimasi kanal menggunakan metode Least Square (LS) nilai Mean Square Error (MSE) yang diperoleh cenderung lebih besar dari metode estimasi kanal menggunakan metode Minimum Mean Square (MMSE). Hasil kinerja estimasi kanal berdasarkan perhitungan Bit Error Rate (BER) untuk estimasi kanal menggunakan metode LS dan metode MMSE tidak menunjukkan perbedaan yang signifikan yaitu berselisih satu SNR untuk setiap metode estimasi kanal yang digunakan. Kata Kunci : Akustik bawah air, BPSK, Estimasi kanal,OFDM
I. PENDAHULUAN
Komunikasi akustik bawah air merupakan teknologi yang dimanfaatkan dalam berbagai aplikasi seperti penelitian bidang maritim, oseanografi, ekplorasi minyak di daerah lepas pantai dan sistem pertahanan. Fitur-fitur dan arsitektur jaringan sensor bawah air, desain jaringan, gambaran kanal akustik kondisi lingkungan dasar laut telah di sajikan dalam [1]. Komunikasi akustik bawah air menggunakan gelombang suara atau gelombang akustik yang dapat mencapai jarak lebih jauh dari gelombang komunikasi lain tetapi memiliki kecepatan dan bandwitdh yang terbatas [2].
Sistem komunikasi akustik bawah air merupakan media komunikasi yang sulit, karena adanya attenuation, lintas jamak atau multipath, absorption, dan delay spread. Propagasi akustik di dalam air bekerja dengan baik pada frekuensi rendah yaitu 10–15 KHz, dan dengan kecepatan 1500 m/s [3]. Untuk perairan dangkal dengan kondisi lingkungan yang sangat kompleks, bandwidth yang tersedia terbatas tergantung dari jarak dan frekuensi. Desain dan simulasi membutuhkan pemodelan kanal yang akurat, dengan menggunakan metode ray teory untuk memberikan gambaran deterministik propagasi multipath dengan menambahkan deskripsi
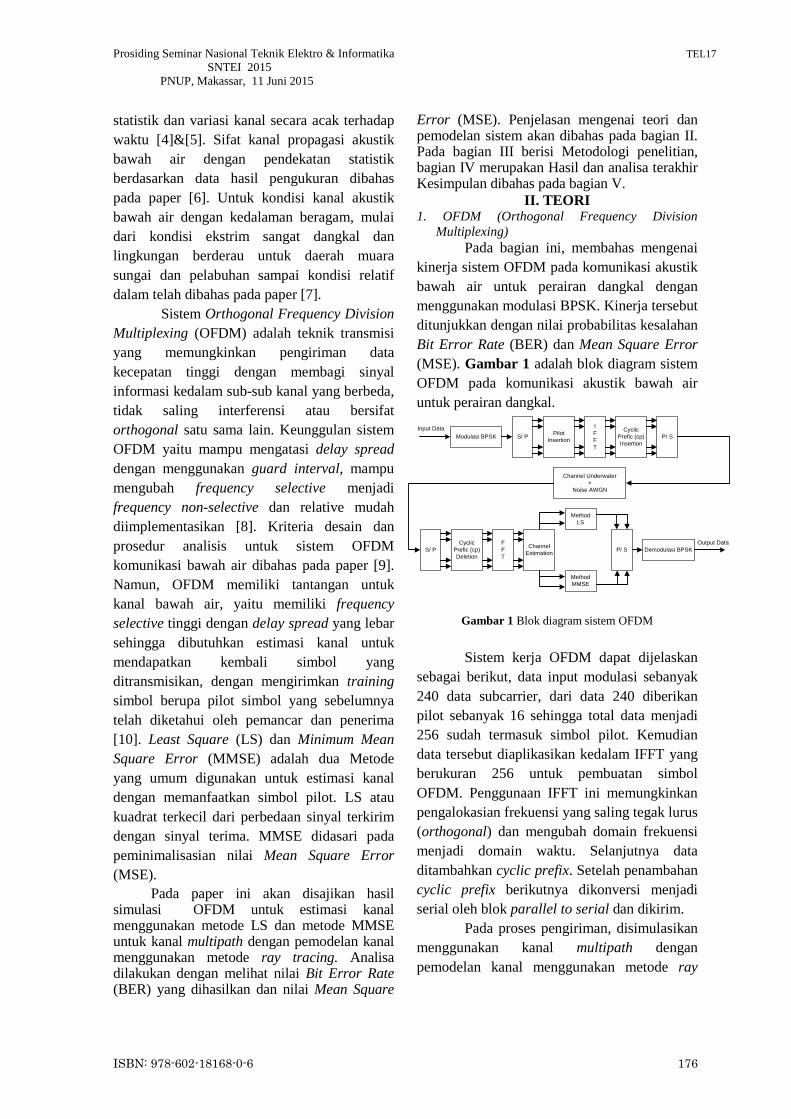
Prosiding Seminar Nasional Teknik Elektro & Informatika TEL17 SNTEI 2015 PNUP, Makassar, 11 Juni 2015
ISBN: 978-602-18168-0-6 176
statistik dan variasi kanal secara acak terhadap waktu [4]&[5]. Sifat kanal propagasi akustik bawah air dengan pendekatan statistik berdasarkan data hasil pengukuran dibahas pada paper [6]. Untuk kondisi kanal akustik bawah air dengan kedalaman beragam, mulai dari kondisi ekstrim sangat dangkal dan lingkungan berderau untuk daerah muara sungai dan pelabuhan sampai kondisi relatif dalam telah dibahas pada paper [7].
Sistem Orthogonal Frequency Division Multiplexing (OFDM) adalah teknik transmisi yang memungkinkan pengiriman data kecepatan tinggi dengan membagi sinyal informasi kedalam sub-sub kanal yang berbeda, tidak saling interferensi atau bersifat orthogonal satu sama lain. Keunggulan sistem OFDM yaitu mampu mengatasi delay spread dengan menggunakan guard interval, mampu mengubah frequency selective menjadi frequency non-selective dan relative mudah diimplementasikan [8]. Kriteria desain dan prosedur analisis untuk sistem OFDM komunikasi bawah air dibahas pada paper [9]. Namun, OFDM memiliki tantangan untuk kanal bawah air, yaitu memiliki frequency selective tinggi dengan delay spread yang lebar sehingga dibutuhkan estimasi kanal untuk mendapatkan kembali simbol yang ditransmisikan, dengan mengirimkan training simbol berupa pilot simbol yang sebelumnya telah diketahui oleh pemancar dan penerima [10]. Least Square (LS) dan Minimum Mean Square Error (MMSE) adalah dua Metode yang umum digunakan untuk estimasi kanal dengan memanfaatkan simbol pilot. LS atau kuadrat terkecil dari perbedaan sinyal terkirim dengan sinyal terima. MMSE didasari pada peminimalisasian nilai Mean Square Error (MSE).
Pada paper ini akan disajikan hasil simulasi OFDM untuk estimasi kanal menggunakan metode LS dan metode MMSE untuk kanal multipath dengan pemodelan kanal menggunakan metode ray tracing. Analisa dilakukan dengan melihat nilai Bit Error Rate (BER) yang dihasilkan dan nilai Mean Square
Error (MSE). Penjelasan mengenai teori dan pemodelan sistem akan dibahas pada bagian II. Pada bagian III berisi Metodologi penelitian, bagian IV merupakan Hasil dan analisa terakhir Kesimpulan dibahas pada bagian V.
II. TEORI 1. OFDM (Orthogonal Frequency Division
Multiplexing) Pada bagian ini, membahas mengenai
kinerja sistem OFDM pada komunikasi akustik bawah air untuk perairan dangkal dengan menggunakan modulasi BPSK. Kinerja tersebut ditunjukkan dengan nilai probabilitas kesalahan Bit Error Rate (BER) dan Mean Square Error (MSE). Gambar 1 adalah blok diagram sistem OFDM pada komunikasi akustik bawah air untuk perairan dangkal.
Modulasi BPSK S/ P
IFFT
Pilot Insertion P/ S
Cyclic Prefic (cp) Insertion
Input Data
Channel Underwater +
Noise AWGN
S/ PCyclic
Prefic (cp) Deletion
FFT
Channel Estimation
Method LS
Method MMSE
P/ S Demodulasi BPSK Output Data
Gambar 1 Blok diagram sistem OFDM
Sistem kerja OFDM dapat dijelaskan
sebagai berikut, data input modulasi sebanyak 240 data subcarrier, dari data 240 diberikan pilot sebanyak 16 sehingga total data menjadi 256 sudah termasuk simbol pilot. Kemudian data tersebut diaplikasikan kedalam IFFT yang berukuran 256 untuk pembuatan simbol OFDM. Penggunaan IFFT ini memungkinkan pengalokasian frekuensi yang saling tegak lurus (orthogonal) dan mengubah domain frekuensi menjadi domain waktu. Selanjutnya data ditambahkan cyclic prefix. Setelah penambahan cyclic prefix berikutnya dikonversi menjadi serial oleh blok parallel to serial dan dikirim.
Pada proses pengiriman, disimulasikan menggunakan kanal multipath dengan pemodelan kanal menggunakan metode ray
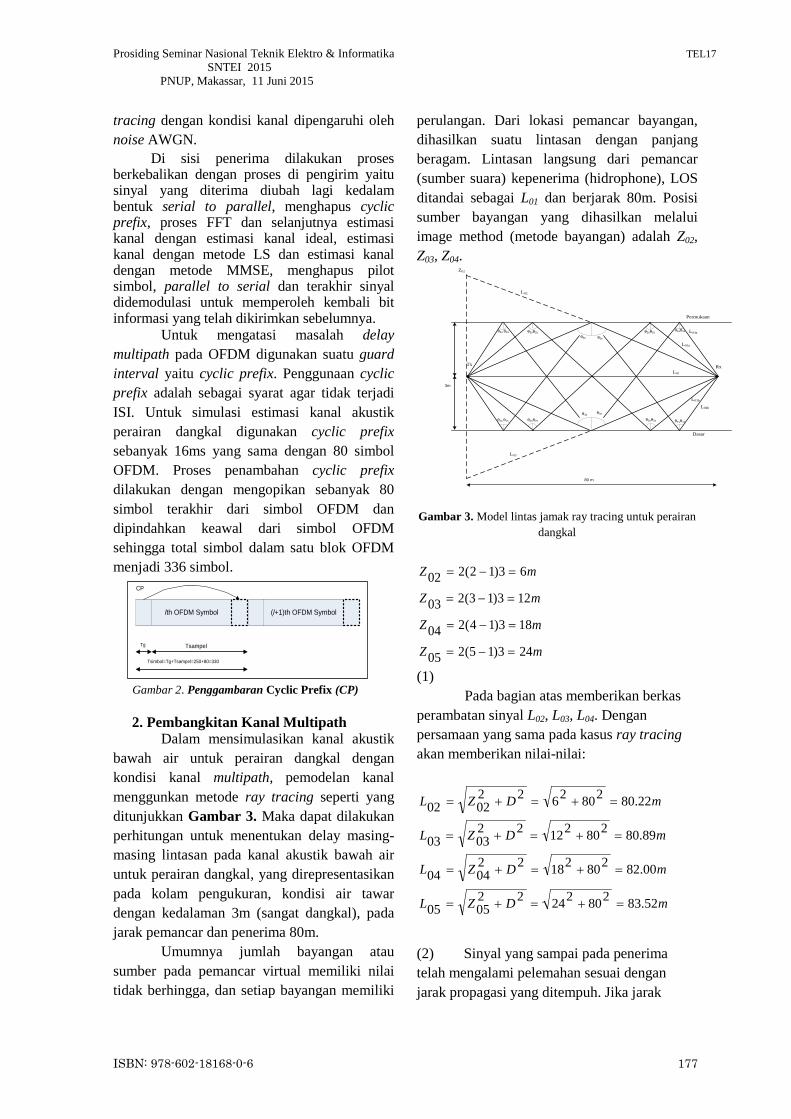
Prosiding Seminar Nasional Teknik Elektro & Informatika TEL17 SNTEI 2015 PNUP, Makassar, 11 Juni 2015
ISBN: 978-602-18168-0-6 177
tracing dengan kondisi kanal dipengaruhi oleh noise AWGN.
Di sisi penerima dilakukan proses berkebalikan dengan proses di pengirim yaitu sinyal yang diterima diubah lagi kedalam bentuk serial to parallel, menghapus cyclic prefix, proses FFT dan selanjutnya estimasi kanal dengan estimasi kanal ideal, estimasi kanal dengan metode LS dan estimasi kanal dengan metode MMSE, menghapus pilot simbol, parallel to serial dan terakhir sinyal didemodulasi untuk memperoleh kembali bit informasi yang telah dikirimkan sebelumnya.
Untuk mengatasi masalah delay multipath pada OFDM digunakan suatu guard interval yaitu cyclic prefix. Penggunaan cyclic prefix adalah sebagai syarat agar tidak terjadi ISI. Untuk simulasi estimasi kanal akustik perairan dangkal digunakan cyclic prefix sebanyak 16ms yang sama dengan 80 simbol OFDM. Proses penambahan cyclic prefix dilakukan dengan mengopikan sebanyak 80 simbol terakhir dari simbol OFDM dan dipindahkan keawal dari simbol OFDM sehingga total simbol dalam satu blok OFDM menjadi 336 simbol.
lth OFDM Symbol (l+1)th OFDM Symbol
Tsampel
CP
Tg
Tsimbol=Tg+Tsampel=250+80=330
Gambar 2. Penggambaran Cyclic Prefix (CP) 2. Pembangkitan Kanal Multipath
Dalam mensimulasikan kanal akustik bawah air untuk perairan dangkal dengan kondisi kanal multipath, pemodelan kanal menggunkan metode ray tracing seperti yang ditunjukkan Gambar 3. Maka dapat dilakukan perhitungan untuk menentukan delay masing-masing lintasan pada kanal akustik bawah air untuk perairan dangkal, yang direpresentasikan pada kolam pengukuran, kondisi air tawar dengan kedalaman 3m (sangat dangkal), pada jarak pemancar dan penerima 80m.
Umumnya jumlah bayangan atau sumber pada pemancar virtual memiliki nilai tidak berhingga, dan setiap bayangan memiliki
perulangan. Dari lokasi pemancar bayangan, dihasilkan suatu lintasan dengan panjang beragam. Lintasan langsung dari pemancar (sumber suara) kepenerima (hidrophone), LOS ditandai sebagai L01 dan berjarak 80m. Posisi sumber bayangan yang dihasilkan melalui image method (metode bayangan) adalah Z02, Z03, Z04.
Tx RxL01
L02
L03a
L04a
L03b
L04b
Dasar
Permukaan
Z02
L03
3m
θ1s θ1s
θ1s θ1s θ1sθ1s
θ1sθ1sθ2sθ2s
θ2sθ2s θ2sθ2s
θ2sθ2s
θ3s θ3s
θ3s θ3s
80 m
Gambar 3. Model lintas jamak ray tracing untuk perairan
dangkal
mZ
mZ
mZ
mZ
243)15(205
183)14(204
123)13(203
63)12(202
=−=
=−=
=−=
=−=
(1) Pada bagian atas memberikan berkas
perambatan sinyal L02, L03, L04. Dengan persamaan yang sama pada kasus ray tracing akan memberikan nilai-nilai:
mDZL
mDZL
mDZL
mDZL
52.83280224220505
00.82280218220404
89.80280212220303
22.8028026220202
=+=+=
=+=+=
=+=+=
=+=+=
(2) Sinyal yang sampai pada penerima telah mengalami pelemahan sesuai dengan jarak propagasi yang ditempuh. Jika jarak

Prosiding Seminar Nasional Teknik Elektro & Informatika TEL17 SNTEI 2015 PNUP, Makassar, 11 Juni 2015
ISBN: 978-602-18168-0-6 178
tempuh dinyatakan dengan L, dan kecepatan perambatan sinyal akustik dalam air adalah c (c = 1495 m/s untuk air tawar), maka besarnya waktu tempuh dapat dihitung dengan persamaan tL = L/c. Tabel 1 menunjukkan jarak lintasan yang terbentuk dengan metode ray tracing . Tabel 1 Jarak lintasan terbentuk dengan ray tracing pada
Tx-Rx = 80m Lintasan
ke_n L_80 (M)
T (ms)
Power norm (dB)
1 80 53.33 -18.57 2 80.22 53.48 -13.99 3 80.89 53.93 -7.23 4 82.00 54.67 -2.43 5 83.53 55.68 0.00
3. Estimasi Kanal
Estimasi kanal merupakan suatu teknik yang digunakan untuk mengetahui respon impuls dari suatu kanal terhadap sinyal terkirim dengan mengirimkan training simbol berupa pilot simbol yang sebelumnya telah diketahui oleh transmitter dan receiver, yang selanjutnya dikirim bersamaan dengan sinyal informasi. Menggunakan pola pengaturan pilot tipe comb yaitu dengan memasukkan simbol pilot secara periodik pada setiap lokasi subcarrier. penyisipan dilakukan dalam domain frekuensi, dan pengiriman dilakukan dengan menentukan subcarrier mana yang akan digunakan untuk mengirimkan pilot. Penyusunan pilot type comb ditampilkan pada gambar berikut [11]:
Gambar 4. Pola penyusunan pilot tipe comb
1. Estimasi Kanal dengan Metode Least
Square (LS)
Metode estimasi kanal yang digunakan dengan memanfaatkan simbol pilot yaitu dengan estimasi kanal menggunakan metode LS dan metode MMSE, diawali dengan mendapatkan nilai estimasi kanal, Ĥ dengan cara meminimalkan nilai cost function seperti berikut:
( ) ( )HXXHYXHHXYYY
HXYHXYHXYHJHHHHHH
H
+−−=
−−=−=
)(2 (3)
Penurunan persamaan untuk mendapatkan Ĥ
menjadi nol: ( ) ( ) 022)(
=+−=∂
∂ ∗∗ HXXYXHHJ HH
(4)
Sehingga XHXĤ=XHY, akan memberikan penyelesaian persamaan pada estimasi kanal LS seperti berikut:
( ) YXYXXXH HHLS
11 −−==
(5)
Selanjutnya kita tetapkan setiap ĤLS sebagai Ĥ[k]Ls dimana k =0,1,2,..N-1. Matrik X diasumsikan diagonal dalam hal ini tidak terjadi ICI. Maka estimasi kanal LS pada setiap subcarrier dapat ditulis:
1,...2,1,0 dimana ,][][][ −== Nk
kXkYkH LS
(6)
Nilai mean square error (MSE) pada estimasi kanal LS diberikan sebagai berikut:
( ) ( ) ( ) ( ) ( ) ( ) ( ) 2
2
111
11ˆ
Z
Z
HHH
HLS
H
LSLS
ZZZZEZXZXE
YXHYXHEHHHHEMSE
σσ
=
==
−−=−−=−−−
−−
(7)
2. Estimasi Kanal dengan Metode Minimum Means Square Error (MMSE) Secara sederhana metode estimasi
kanal dengan MMSE bisa digambarkan dengan diagram blok sebagai berikut:
Gambar 5. Estimasi kanal dengan MMSE

Prosiding Seminar Nasional Teknik Elektro & Informatika TEL17 SNTEI 2015 PNUP, Makassar, 11 Juni 2015
ISBN: 978-602-18168-0-6 179
Berdasarkan gambar tersebut, nilai mean sequare error (MSE) pada nilai estimasi kanal Ĥ diberikan sebagai
J(Ĥ) = E‖e‖2 = E‖H-Ĥ‖2 (8)
Tujuan estimasi MMSE adalah untuk
mendapatkan nilai estimasi yang lebih baik, dalam hal ini adalah pemilihan bobot W yang tepat. Sehingga persamaan diatas perlu diminimisasi.
Dengan memanfaatkan sifat
orthogonalisasi pada estimasi vektor error HHe ~−= yang akan orthogonal terhadap H~ ,
sehingga:
0~~~
~~~
~)~(
~)(~
=−=
=
−=
−=
HHWRHHR
H
HH-WEH
HEH
HHHWHE
HHHHE
HHeE
(9)
Dalam hal ini H~ adalah estimasi kanal dari least square (LS) yang diberikan sebagai
ZXHYXH11~ −
+=−
= nilai bobot W diperoleh dengan sebagai 1
~~−
= HHRHHRW dengan HHR ~~ RḪḪ
adalah matrik autokorelasi pada matrik H~ , dan diberikan sebagai:
Iz
zHHHE
HXHZZXEHHHE
HXHZZXHXHHZHZHXHHHE
HZXHZXHEYXYXEHHHEHH
R
2
2
)1(1
)1(1)1(1
)1)(1()1(1~~~~
σ
σ+=
−−+=
−−+−+−+=
−+−+=−−==
(10) Sementara
HHR ~ merupakan matrik korelasi
silang antara vektor kanal yang sebenarnya dengan vektor kanal temporer di dalam domain frekuensi. Selanjutnya estimasi kanal dengan MMSE dapat diberikan sebagai berikut:
HIz
zHHRHHRHHHRHHRHWH ~
2
2
~~1~~~~
=
−==
σ
σ
(11) 4. Karakteristik Kanal Akustik Bawah Air
Komunikasi akustik bawah air memiliki karakteristik yang unik, gerakan air yang tidak pernah berhenti, kondisi yang cepat berubah secara drastis tergantung pada lokasi, waktu, dan cuaca. Oleh karena itu kinerja pada komunikasi underwater sulit diperdiksi, dan memiliki batasan-batasan tertentu yang mempengaruhi kinerja kanal.
Pada kanal underwater sendiri dibedakan menjadi 2 jenis yaitu Deep water dan Shallow water. Pada Shallow water tingkat lossis nya lebih sedikit daripada Deep Water. Pada Shallow water, multipath terjadi karena sinyal memantul kembali ketika mengenai permukaan air dan batas ke Deep water. Sedangkan pada Deep water karena adanya tekanan air pada deep water sangat tinggi sehingga menyebabkan transmisi sinyal akan terus dipantulkan seolah-olah sinyal akan kelihatan terus membengkok.
Gambar 6. Propagasi akustik bawah air (a) Shallow
water, (b) Deep water
Tabel 2. Tabel Perbedaan pada sinyal akustik, radio, dan optic untuk Underwater Sensor Network pada propagasi underwater [12]. Carriers Parameter
Akustik Radio Optik
Pelemahan Rendah Tinggi Tinggi Jarak efektif km 10m 10-100m Delay Tinggi Rendah Rendah Bandwidth kHz MHz 10-
150MHz Data rate Up to
100kbps Up to 10Mbps
Up to 1Gbps
Keterbatasan -Bandwidth terbatas
Power terbatas
Lingkungan terbatas
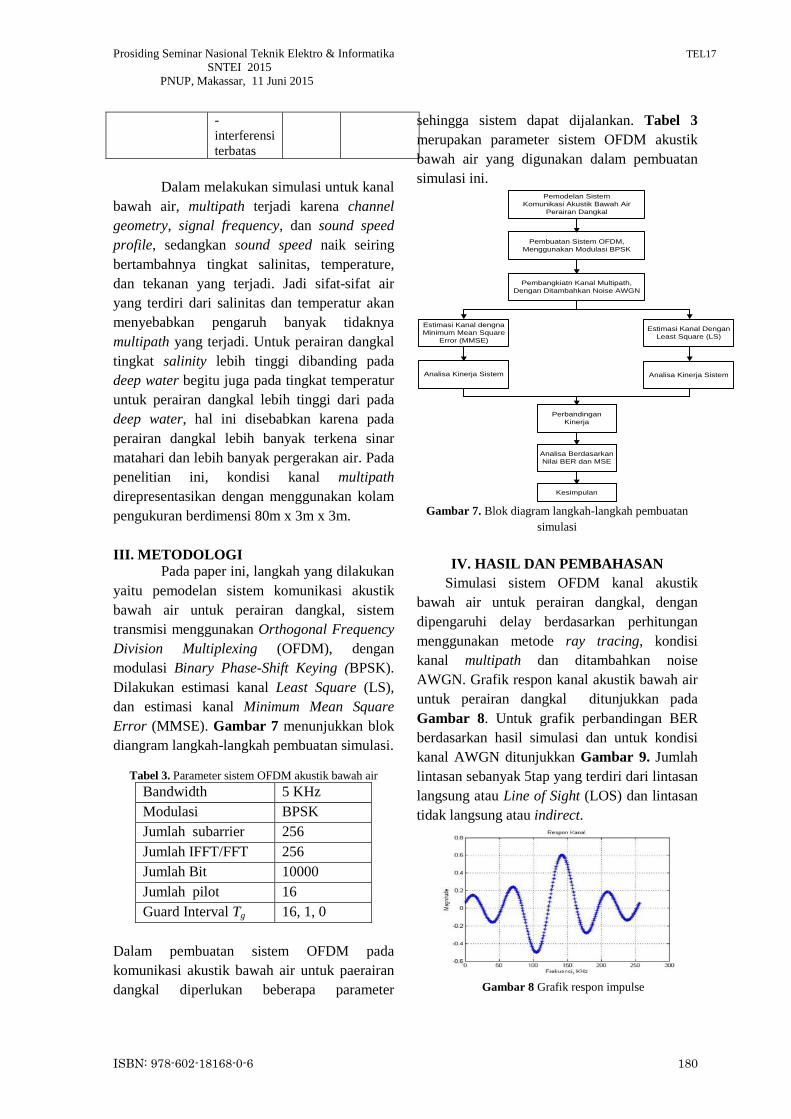
Prosiding Seminar Nasional Teknik Elektro & Informatika TEL17 SNTEI 2015 PNUP, Makassar, 11 Juni 2015
ISBN: 978-602-18168-0-6 180
-interferensi terbatas
Dalam melakukan simulasi untuk kanal
bawah air, multipath terjadi karena channel geometry, signal frequency, dan sound speed profile, sedangkan sound speed naik seiring bertambahnya tingkat salinitas, temperature, dan tekanan yang terjadi. Jadi sifat-sifat air yang terdiri dari salinitas dan temperatur akan menyebabkan pengaruh banyak tidaknya multipath yang terjadi. Untuk perairan dangkal tingkat salinity lebih tinggi dibanding pada deep water begitu juga pada tingkat temperatur untuk perairan dangkal lebih tinggi dari pada deep water, hal ini disebabkan karena pada perairan dangkal lebih banyak terkena sinar matahari dan lebih banyak pergerakan air. Pada penelitian ini, kondisi kanal multipath direpresentasikan dengan menggunakan kolam pengukuran berdimensi 80m x 3m x 3m. III. METODOLOGI
Pada paper ini, langkah yang dilakukan yaitu pemodelan sistem komunikasi akustik bawah air untuk perairan dangkal, sistem transmisi menggunakan Orthogonal Frequency Division Multiplexing (OFDM), dengan modulasi Binary Phase-Shift Keying (BPSK). Dilakukan estimasi kanal Least Square (LS), dan estimasi kanal Minimum Mean Square Error (MMSE). Gambar 7 menunjukkan blok diangram langkah-langkah pembuatan simulasi.
Tabel 3. Parameter sistem OFDM akustik bawah air Bandwidth 5 KHz Modulasi BPSK Jumlah subarrier 256 Jumlah IFFT/FFT 256 Jumlah Bit 10000 Jumlah pilot 16 Guard Interval Tg 16, 1, 0
Dalam pembuatan sistem OFDM pada komunikasi akustik bawah air untuk paerairan dangkal diperlukan beberapa parameter
sehingga sistem dapat dijalankan. Tabel 3 merupakan parameter sistem OFDM akustik bawah air yang digunakan dalam pembuatan simulasi ini.
Pemodelan SistemKomunikasi Akustik Bawah Air
Perairan Dangkal
Pembuatan Sistem OFDM, Menggunakan Modulasi BPSK
Estimasi Kanal dengna Minimum Mean Square
Error (MMSE)
Perbandingan Kinerja
Kesimpulan
Estimasi Kanal Dengan Least Square (LS)
Analisa Kinerja Sistem
Pembangkiatn Kanal Multipath, Dengan Ditambahkan Noise AWGN
Analisa Kinerja Sistem
Analisa Berdasarkan Nilai BER dan MSE
Gambar 7. Blok diagram langkah-langkah pembuatan simulasi
IV. HASIL DAN PEMBAHASAN
Simulasi sistem OFDM kanal akustik bawah air untuk perairan dangkal, dengan dipengaruhi delay berdasarkan perhitungan menggunakan metode ray tracing, kondisi kanal multipath dan ditambahkan noise AWGN. Grafik respon kanal akustik bawah air untuk perairan dangkal ditunjukkan pada Gambar 8. Untuk grafik perbandingan BER berdasarkan hasil simulasi dan untuk kondisi kanal AWGN ditunjukkan Gambar 9. Jumlah lintasan sebanyak 5tap yang terdiri dari lintasan langsung atau Line of Sight (LOS) dan lintasan tidak langsung atau indirect.
Gambar 8 Grafik respon impulse

Prosiding Seminar Nasional Teknik Elektro & Informatika TEL17 SNTEI 2015 PNUP, Makassar, 11 Juni 2015
ISBN: 978-602-18168-0-6 181
Gambar 9 Kinerja sistem OFDM untuk kanal
multipath Proses estimasi kanal dilakukan dengan
memanfaatkan training symbol berupa pilot tones yang ditransmisikan bersamaan dengan symbol- symbol data. Jumlah pilot yang digunakan sebanyak 16, dengan pola penyisipan menggunakan tipe comb. Penilaian keakuratan estimasi kanal dilakukan dengan perhitungan rata-rata kuadrat error, seperti yang ditunjukkan pada Gambar 10. Dengan jumlah lintasan sebanyak 5 tap.
Gambar 10. Hasil simulasi kinerja OFDM kanal akustik bawah air berdasarkan perhitungan MSE
Analisa perhitungan BER berdasarkan hasil estimasi kanal ditunjukkan pada Gambar 11 dan Gambar 12. Estimasi kanal dilakukan dengan membandingkan estimasi LS dan estimasi MMSE. Nilai BER dibandingkan untuk setiap Tap dengan jumlah Tap sebanyak 5Tap.
Gambar 11. Perbandingan BER masing-masing Tap
untuk estimasi kanal LS
Gambar 12. Perbandingan BER masing-masing Tap
untuk estimasi kanal MMSE
V. KESIMPULAN 1. Sistem komunikasi akustik bawah air
merupakan sistem komunikasi yang sulit karena adanya attenuasi, multipath, absorbsi, dan delay spread. Bandwidth yang tersedia kecil yaitu 5KHz dan bekerja dengan baik pada frekuensi rendah yaitu 10-15KHz.
2. Kondisi kanal multipath merupakan kondisi yang merepresentasikan kondisi real dari kanal akustik bawah air, karena adanya gerakan gelombang air setiap saat yang menyebabkan terjadinya banyak pantulan sehingga akan selalu terjadi error karena banyaknya lintasan yang dilalui oleh informasi sebelum sampai kepenerima
3. Estimasi kanal pada sistem OFDM dilakukan dengan memanfaatkan training simbol berupa pilot tone, yang diharapkan mampu memberikan kinerja

Prosiding Seminar Nasional Teknik Elektro & Informatika TEL17 SNTEI 2015 PNUP, Makassar, 11 Juni 2015
ISBN: 978-602-18168-0-6 182
yang bagus pada penerima dalam memprediksi kanal propagasi dengan mengetahui kuadrat error dari estimasi kanal menggunakan perhitungan MSE. Dimana nilai MSE yang muncul berbanding terbalik dengan kenaikan SNR Hasil proses estimasi kanal berdasarkan perhitungan BER. Dimana Penambahan jumlah Tap akan menurunkan kinerja sistem. Semakin kecil jumlah Tap yang digunakan maka semakin kecil nilai BER yang diperoleh.
UCAPAN TERIMA KASIH
Terima kasih dan penghargaan sebesar-besarnya kepada kedua orang tua penulis Mabe Parenreng dan Salma, atas segala pengorbanan, penderitaan, kekecewaan dan tetesan air mata atas diri penulis, dan juga saudaraku yang senang tiasa memberikan semangat. Kepada Bapak Dr. Ir. Wirawan, DEA. selaku Pembimbing I, dan Bapak Tri Budi Santoso, ST., MT. selaku Pembimbing II, yang senang tiasa rela meluangkan waktunya untuk memberikan bimbingan dan dorongan moril selama pembuatan dan penyusunan penelitian ini
REFERENSI
[1] I.F.Alkydiz, D. Pompili, dan T. Melodia, “Underwater Acoustic Sensor Network: Research Chalenges”, Elsevier, Ad Hoc Network, 2005.
[2] S. Ismail, dan D. P. Kurniadi, “Sistem Komunikasi Menggunakan Gelombang Akustik dengan Memanfaatkan Bawah Air sebagai Medium Propagasi” , Jurnal Elektronika, No.1, Vol.9, juni 2009.
[3] M. Stojanovic, “Underwater Acoustic Communications: Design Considerations on the Physical Layer” , Proc. of Wireless on Demand System and Service 2008, Wons 2008.
[4] F. D. Rango, F. Veltri, dan P. Fazio, “ A Multipath Fading Channel Model for Underwater Shallow Acoustic Communications”, Proc. of Communication (ICC), 2012 IEEE
International Conference On, 10-15 June 2012.
[5] A. Radosevic, J. G. Proakis, M. Stojanovic, “ Statistical Characterization and Capacity of Shallow Water Acoustic Channel”, Proc. of IEEE Oceans’09 Conference, Bremen, Germany, May 2009.
[6] P. Qarabaqi, dan M. Stojanovic, “Statistical Modeling of a Shallow Water Acoustic Communication Channel” , Proc. of Underwater Acoustic Meansurements Conference, Nafplion, Greece, June 2009.
[7] B. Borowski, “Characterization of a Very Shallow Water Acoustic Communication Channels” , Proc. of Oceans 2009, MTS/ IEEE Biloxi-Marine Technology for Our Future: Global and Local Challenges.
[8] K. Tu, D. Fertonani, T. M. Duman, dan P. Hursky, “ Mitigation of Intercarrier Interference for OFDM Over Time_Varying Underwater Acoustic Channel”, IEEE Journal of Oceanic Engneering, Vol 36, No. 2, April 2011.
[9] B. C. Kim, dan I. T. Lu, “ Parameter Study of OFDM Underwater Communications System”, Proc. of Oceans 2000 MTS/ IEEE Conference and Exhibition, Vol 2, Sept 2000.
[10] W. Yonggang, “ Underwater Acoustic Channel Estimation for Pilot Based OFDM”, Proc. of Signal Processing, Communications and Computing (ICSPCC), 2011 IEEE International Comference On, 14-16 Sept 2011.
[11] Y.S. Cho, J. Kim, W. Y. Yang dan C. G. Kang, “MIMO-OFDM Wireless Communication with Matlab”, John Wiley & Sons (Asia) Pte Ltd, IEEE Press, 2010.
[19] M. Stojanovic, "Underwater Acoustic Communications,'' in Encyclopedia of Electrical and Electronics Engineering, John G. Webster, Ed., John Wiley & Sons, 1999, Vol.22, pp.688-698.

Prosiding Seminar Nasional Teknik Elektro & Informatika IT26 SNTEI 2015 PNUP, Makassar, 11 Juni 2015
ISBN: 978-602-18168-0-6 183
Rancang Bangun Penyandian Saluran HDB3 Berbasis FPGA
Sahbuddin Abdul Kadir1, Irmawati2 1,2Teknik Elektro, Politeknik Negeri Ujung Pandang
[email protected], [email protected]
Abstrak Pada sistem komunikasi digital, informasi direpresentasikan dalam bentuk bit nol dan satu. Untuk jarak
tertentu, representasi ini masih memungkinkan diidentifikasi pada penerima. Sebaliknya untuk jarak jauh akan menimbulkan masalah komponen dc dan sinkronisasi. Komponen dc pada penyandian saluran dapat dihilangkan dengan 2 level teganngan yang selalu berlawanan pada representasi bit satu (AMI). Sedangakan untuk mengatasi masalah sinkronisasi digunakan teknik penyandian yang bukan sekedar merepresentasikan informasi ke dalam bit nol dan satu yang dikenal dengan teknik scrambling. Penyandian High Density Bipolar-3 zero (HDB3) adalah salah satu teknik scrambling yang mengadaptasi penyandian Alternate Mark Inversion (AMI) yang bermasalah pada proses sinkronisasi untuk runtun bit nol yang panjang dengan menambahkan bit yang tidak nol pada setiap runtun bit nol yang lebih dari tiga. Pada penelitian ini dirancang penyandian saluran HDB3 dalam bentuk ip core menggunakan FPGA sebagai modul pembelajaran pada praktikum Saluran Transmisi Dan Telekomunikasi Radio untuk mendemonstarasikan bagaimana teknik scrambling mengatasi masalah sinkronisasi pada penyandian saluran AMI. Hasil penelitian ini menunjukkan bahwa dengan menambahkan bit yang tidak nol pada setiap runtun bit nol yang lebih dari 3membuat runtun bit tersebut tetap memiliki variasi sinyal dan tidak mengikuti algoritma AMI. Sehingga memudahkan pemulihan bit-bit informasi dan sinkronisasi. Kata kunci: Ip Core, Sinkronisasi, Scrambling, AMI, HDB3 I. PENDAHULUAN
Pada sistem komunikasi digital, informasi
direpresentasikan dalam bentuk bit nol dan satu. Namun representasi ini menimbulkan masalah komponen dc yang merupakan amplitude rata-rata bit yang tidak nol. Sehingga tidak dapat digunakan pada media yang tidak dapat melewatkan komponen dc. Selain itu, pada runtun bit nol atau satu yang panjang dapat menyebabkan hilangnya sinkronisasi. Karena jika sinyal tidak bervariasi, maka penerima tidak dapat membedakan mana yang awal dan akhir dari tiap-tiap bit. Oleh karena itu diperlukan teknik penyandian yang bukan sekedar merepresentasikan informasi ke dalam bit nol dan satu, tetapi memiliki kualifikasi yang dapat diidentifikasi pada penerima. penyandian ini dikenal dengan teknik scrambling mengadaptasi teknik penyandian saluran untuk mengatasi permasalahan sinkronisasi. Teknik ini sering digunakan untuk layanan transmisi jarak jauh menggunakan penyandian High Density Bipolar-3 Zeros (HDB3) dan Bipolar With 8-Zeros Substitution (B8ZS). Penyandian HDB3 merupakan modifikasi penyandian Alternate Mark Inversion (AMI) yang bermasalah pada proses sinkronisasi untuk runtun bit nol yang panjang dengan menyisipkan bit yang tidak nol pada
setiap runtun bit nol yang lebih dari tiga. Tetapi komponen dc tidak nampak lagi pada penyandian saluran AMI yang menggunakan polaritas berlawanan pada setiap bit satu dan tegangan 0V untuk bit nol.
Pada penelitian ini dirancang penyandian saluran HDB3 menggunakan metode sistem on chip dan diimplementasikan pada FPGA sebagai modul pembelajaran pada Praktikum Saluran Transmisi dan Telekomunikasi Radio untuk mendemonstrasikan bagaimana teknik scrambling dapat mengatasi masalah sinkronisasi pada penyandian saluran AMI.
II. KAJIAN LITERATUR 2.1 Penyandian Saluran
Penyandian saluran adalah pola pengkodean sinyal serial digital yang digunakan untuk mempertahankan reliabilitas dan integritas data. Line code yang digunakan ditentukan oleh penyedia layanan komunikasi data. Bentuk kode biner 1 dan 0 seperti pada sinyal PCM, dapat direpresentasikan dalam beberapa format sinyal serial digital yang disebut sebagai line-code sebagai berikut: 2.1.1 Unipolar
Pengkodean saluran jenis polar tunggal atau unipolar adalah suatu pengkodean yang paling sederhana. Pengkodean unipolar hanya menggunakan sebuah level tegangan atau satu
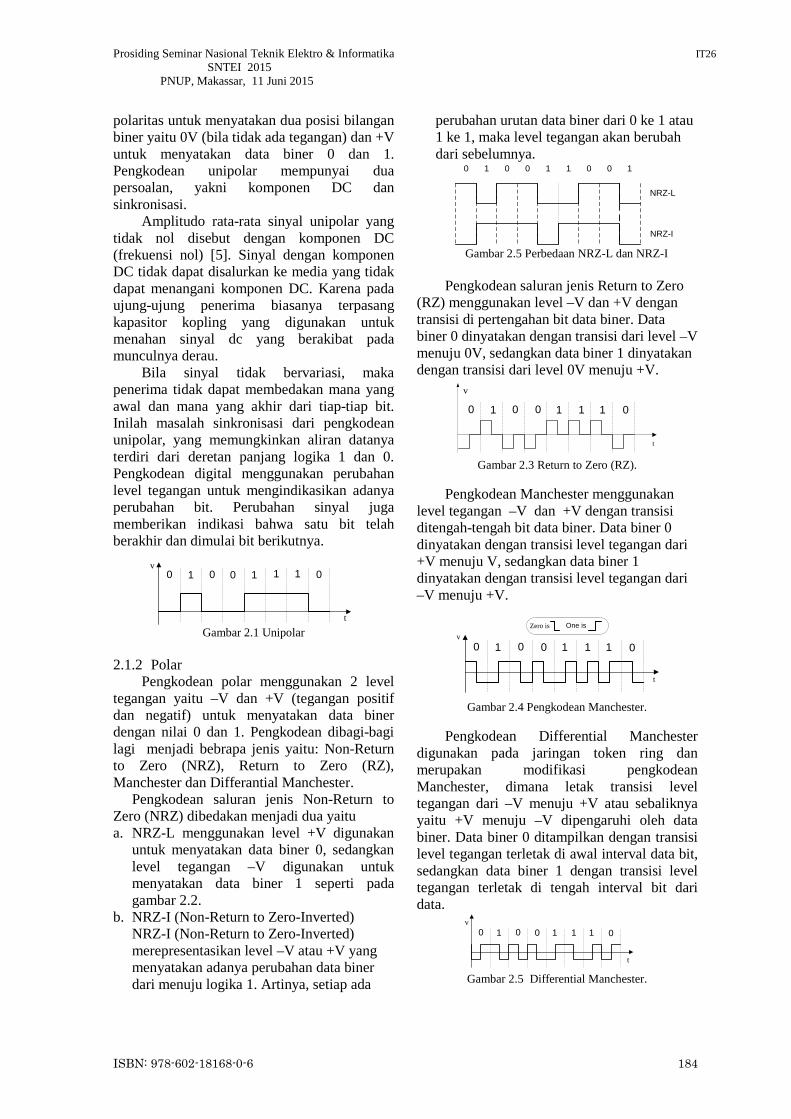
Prosiding Seminar Nasional Teknik Elektro & Informatika IT26 SNTEI 2015 PNUP, Makassar, 11 Juni 2015
ISBN: 978-602-18168-0-6 184
polaritas untuk menyatakan dua posisi bilangan biner yaitu 0V (bila tidak ada tegangan) dan +V untuk menyatakan data biner 0 dan 1. Pengkodean unipolar mempunyai dua persoalan, yakni komponen DC dan sinkronisasi.
Amplitudo rata-rata sinyal unipolar yang tidak nol disebut dengan komponen DC (frekuensi nol) [5]. Sinyal dengan komponen DC tidak dapat disalurkan ke media yang tidak dapat menangani komponen DC. Karena pada ujung-ujung penerima biasanya terpasang kapasitor kopling yang digunakan untuk menahan sinyal dc yang berakibat pada munculnya derau.
Bila sinyal tidak bervariasi, maka penerima tidak dapat membedakan mana yang awal dan mana yang akhir dari tiap-tiap bit. Inilah masalah sinkronisasi dari pengkodean unipolar, yang memungkinkan aliran datanya terdiri dari deretan panjang logika 1 dan 0. Pengkodean digital menggunakan perubahan level tegangan untuk mengindikasikan adanya perubahan bit. Perubahan sinyal juga memberikan indikasi bahwa satu bit telah berakhir dan dimulai bit berikutnya.
0 1 0 0 01 1 1v
t
Gambar 2.1 Unipolar 2.1.2 Polar
Pengkodean polar menggunakan 2 level tegangan yaitu –V dan +V (tegangan positif dan negatif) untuk menyatakan data biner dengan nilai 0 dan 1. Pengkodean dibagi-bagi lagi menjadi bebrapa jenis yaitu: Non-Return to Zero (NRZ), Return to Zero (RZ), Manchester dan Differantial Manchester.
Pengkodean saluran jenis Non-Return to Zero (NRZ) dibedakan menjadi dua yaitu a. NRZ-L menggunakan level +V digunakan
untuk menyatakan data biner 0, sedangkan level tegangan –V digunakan untuk menyatakan data biner 1 seperti pada gambar 2.2.
b. NRZ-I (Non-Return to Zero-Inverted) NRZ-I (Non-Return to Zero-Inverted) merepresentasikan level –V atau +V yang menyatakan adanya perubahan data biner dari menuju logika 1. Artinya, setiap ada
perubahan urutan data biner dari 0 ke 1 atau 1 ke 1, maka level tegangan akan berubah dari sebelumnya.
1 1 1 10 0 0 0 0
NRZ-L
NRZ-I
Gambar 2.5 Perbedaan NRZ-L dan NRZ-I
Pengkodean saluran jenis Return to Zero (RZ) menggunakan level –V dan +V dengan transisi di pertengahan bit data biner. Data biner 0 dinyatakan dengan transisi dari level –V menuju 0V, sedangkan data biner 1 dinyatakan dengan transisi dari level 0V menuju +V.
0 1 0 0 1 11 0
t
v
Gambar 2.3 Return to Zero (RZ).
Pengkodean Manchester menggunakan
level tegangan –V dan +V dengan transisi ditengah-tengah bit data biner. Data biner 0 dinyatakan dengan transisi level tegangan dari +V menuju V, sedangkan data biner 1 dinyatakan dengan transisi level tegangan dari –V menuju +V.
0 1 0 0 11 1 0
Zero is One is v
t
Gambar 2.4 Pengkodean Manchester.
Pengkodean Differential Manchester
digunakan pada jaringan token ring dan merupakan modifikasi pengkodean Manchester, dimana letak transisi level tegangan dari –V menuju +V atau sebaliknya yaitu +V menuju –V dipengaruhi oleh data biner. Data biner 0 ditampilkan dengan transisi level tegangan terletak di awal interval data bit, sedangkan data biner 1 dengan transisi level tegangan terletak di tengah interval bit dari data.
0 1 0 0 11 1 0v
t Gambar 2.5 Differential Manchester.

Prosiding Seminar Nasional Teknik Elektro & Informatika IT26 SNTEI 2015 PNUP, Makassar, 11 Juni 2015
ISBN: 978-602-18168-0-6 185
2.1.3 Bipolar Jenis pengkodean bipolar yaitu
pengkodean dengan menggunakan 3 level tegangan, yaitu: -V, 0V, dan +V untuk menyatakan data biner. Bit “0” akan bernilai level tegangan nol dan bit “1” dengan tegangan yang selalu berlawanan polaritas dari positif ke negatif atau sebaliknya dari negatif ke positif.
Bipolar Alternate Mark Inversion (AMI) menggunakan level tegangan 0V untuk bit 0. Sedangkan bit 1 dinyatakan dengan level tegangan –V dan +V secara bergantian.
0 1 0 0 0 0 1 1 0 0 0 0 0 0 0 0 1 0
Gambar 2.6 Alternate Mark Inversion (AMI)
Dengan algoritma ini, AMI mempunyai nol komponen dc. Tetapi bipolar AMI tidak memiliki mekanisme sinkronisasi untuk bit 0 yang panjang [2]. Ada 2 (dua) variasi bipolar AMI yang telah dikembangkan untuk memecahkan masalah sinkronisasi urutan 0, untuk transmisi jarak jauh. Pertama Bipolar 8 Zero Subtitution (B8ZS) digunakan di Amerika dan yang kedua High Density Bipolar (HDB3) digunakan di Eropa dan Jepang [6]. Kedua-duanya merupakan adaptasi dari bipolar AMI untuk mengatasi permasalahan runtun bit 0 yang panjang.
0 1 0 0 0 0 1 1 0 0 0 0 0 0 0 0 1 0
Gambar 2.7 Data AMI dan HDB3.
2.2 Field-Programmable Gate Array (FPGA)
FPGA merupakan sebuah IC digital yang sering digunakan untuk mengimplementasikan rangkaian digital. FPGA berbentuk komponen elektronika dan semikonduktor yang terdiri dari komponen gerbang terprogram (programmable logic) dan sambungan terprogram (interkoneksi). Komponen gerbang terprogram terdiri atas gerbang logika biasa (AND, OR, NOT) maupun fungsi matematis dan kombinatorik yang lebih kompleks, seperti decoder, adder, subtractor dan multiplier. Selain itu, Blok-blok komponen di dalam FPGA juga terdapat elemen memori (register) mulai dari flip-flop sampai pada RAM (Random Access Memory). FPGA sangat
sesuai untuk pemrosesan komputasi algoritma integrasi numerik. FPGA mempunyai koreksi error yang kecil dan merupakan teknologi yang bebas (technology-independent) untuk diimplementasikan dalam berbagai algoritma. Kinerja aplikasi FPGA lebih cepat dibandingkan dengan aplikasi mikrokontroler, karena FPGA hanya mensintesis perangkat keras saja, sementara mikrokontroler mengeksekusi instruksi perangkat lunak yang digunakan untuk mengendalikan perangkat keras, sehingga waktu tunda yang diimplementasikan hanya memakan waktu tunda perambatan (propagation delay) saja.
z Gambar 2.8 FPGA jenis Altera Cyclone De2.
Pengertian terprogram (programmable)
pada FPGA adalah seperti interkoneksi saklar pada bread board yang bisa diubah sesuai kebutuhan pengguna. Interkoneksi ini bisa diprogram kembali oleh pengguna di lab atau lapangan (field). Oleh karena itu jajaran gerbang logika (Gate Array) ini disebut field-programmable. III. METODE PENELITIAN
Metode penelitian yang digunakan pada panelitian ini adalah desain dan implemntasi penyandian saluran HDB3 pada encoder dan decoder. Desain dilakukan dengan bahasa pemrograman HDL verilog sedangkan implementasi menggunakan FPGA. 3.1 Encoder
Encoder pada penyadian saluran HDB3 akan digunakan untuk mengubah data NRZ ke data HDB3. 3.1.1 Detektor Bit 0
Rangkaian detektor bit 0 berfungsi untuk mendeteksi runtun bit 0 yang lebih dari tiga. Output detektor akan berlogika satu jika terdapat runtun bit 0 yang lebih dari tiga seperti yang ditunjukkan pada Gambar 3.1

Prosiding Seminar Nasional Teknik Elektro & Informatika IT26 SNTEI 2015 PNUP, Makassar, 11 Juni 2015
ISBN: 978-602-18168-0-6 186
Gambar 3.1. Rangkaian Detektor Bit 000.
3.1.2 Pembangkit V-Bit
Rangkaian pembangkit V bit juga berfungsi untuk mengubah bit 0 yang keempat pada rentetan bit 0 yang panjang akan dibangkitkan menjadi bit 1, namun dalam rangkaian ini bit 1 dibangkitkan dalam format V bit.
Gambar 3.2 Rangkaian Pembangkit V-Bit.
3.1.3 Pembangkit B-Bit
Rangkaian pembangkit B bit juga berfungsi untuk mengubah bit 0 yang pertama dan keempat yang panjang dibangkitkan menjadi bit 1,namun dalam rangkaian ini, bit 1 dibangkitkan dalam format B bit.
Gambar 3.3. Rangkain Pembangkit B-Bit.
3.1.4 Proses Pemrograman Polaritas Digital
Pada rangkaian Polaritas Digital berfungsi untuk membentuk 3 level tegangan yang nantinya akan terlihat pada rangkaian Polaritas Analog yang menghasilkan format pengkodean HDB-3. Adapun proses pemrograman polaritas digital mengikuti gambar rangkaian polaritas digital seperti yang ditunjukkan pada Gambar 3.4.
Q
QSET
CLR
D
Q
QSET
CLR
D
Q
QSET
CLR
D
V-bit
B-bit
q000
clock
+v
-V
Gambar 3.4. Rangkaian Polaritas Digital
3.1.5 Pembangkit Polaritas
Rangkaian Pembangkit Polaritas menggunakan penguat Opamp untuk
membangkitkan polaritas –V, 0V dan +V seperti pada gambar 3.5 [4].
1K
1K
200K1K
1K 470+v
0v
-v HDB3
Gambar 3.5. Rangkaian Polaritas Analog.
3.2 Decoder
Rangkaian decoder HDB-3 akan melakukan proses yang sebaliknya pada encoder [1]. Rangkain ini akan mendeteksi runtun bit 000v dan b00v. Kemudian runtun bit tersebut dikembalikan menjadi runtun bit nol. Sedangkan polaritas bit satu negatif disearahkan dengan polaritas bit satu yang positif. Sehingga diperoleh sinyal dengan runtun bit nol dan satu tanpa v dan b bit yang sama dengan bit yang dikodekan pada penerima setelah melalui proses sinkronisasi.
Gambar3.7 Rangkaian Decoder HDB-3
3.2.1 Pembangkit Polaritas
Pada output sinyal HDB-3 terdapat tiga level tegangan yaitu +V, 0, -V. Sedangkan polaritas sinyal NRZ hanya menggunakan dua level tegangan +V dan 0. Maka pada decoder HDB3 sinyal dengan polaritas negatif akan dikembalikan ke polaritas positif melalui pembangkit polaritas sebagai barikut:
Mulai
-V
Deteksi Polaritas snyal
Ubah ke polaritas +V
Penjumlah
Lanjut
Selesai
Ya
Tidak
Gambar 3.7 Flowchart Pembangkit Polaritas
3.2.2 Pemisahan V-bit
Jika pada encoder HDB3 V-bit dibangkitkan jika terdapat runtun bit 0 yang lebih dari tiga baik pada saat jumlah bit 1 ganjil

Prosiding Seminar Nasional Teknik Elektro & Informatika IT26 SNTEI 2015 PNUP, Makassar, 11 Juni 2015
ISBN: 978-602-18168-0-6 187
atau genap. Maka sebaliknya pada decoder HDB3 V-bit dipisahkan dari runtun bit data atau yang bukan bit sisipan.
Hasil dari proses pemisahan V-bit, akan diperoleh deretan pulsa yang masih mengandung B-bit tetapi sudah menggunakan dua polaritas tegangan yang menjadi bentuk dasar sinyal NRZ. Proses pemisahan V-bit dapat ditunjukkan pada flowchart dengan bahasa pemrograman HDL Verilog sebagai berikut:
Mulai
-V
Deteksi Polaritas sinyal
Ubah ke polaritas +V
Penjumlah
Lanjut
Selesai
Ya
Tidak
Gambar 3.10. Flowchart pemisah V-bit.
3.2.3 Pemisahan B-bit
Proses pemisahan B-bit pada decoder HDB3 sama seperti pada proses pemisahan V-bit. Tetapi posisi bit yang berbeda. V-bit berada pada bit yang ke empat runtun 4 bit 0. Sedangkan B-bit berada pada bit pertama runtun 4 bit 0. Proses pemisahan B-bit juga akan menghasilkan sinyal dengan dua polaritas tegangan. Sinyal ini merupakan sinyal NRZ tetapi belum sinkron dan setelah melalui proses sinkronisasi akan diperoleh sinyal yang sama dengan sinyal NRZ pada encoder HDB3.
Mulai
Deteksi B-bit
B-bit
And 1'b’0 And 1'bit’1
OR
Lanjut
Selesai
Ya
Tidak
Gambar 3.11. Flowchart pemisah B-bit.
3.2.4 Pembangkit Sinyal NRZ
Pada pembangkit sinyal NRZ berfungsi untuk membentuk dua level tegangan,-V dan +V. Pada bit 0 menyatakan tegangan yang lebih rendah dan bit 1 menyatakan tegangan yang lebih tinggi. Hasil yang diperoleh adalah sinyal
NRZ yang sudah mengalami proses sinkronisasi. 3.2.5 Rangkaian Decoder HDB-3
Rangkaian Decoder HDB-3 akan mengembalikan sinyal HDB-3 menjadi sinyal NRZ seperti pada blok diagram gambar 3.11.
HDB3 Detektor V dan B bit
Detektor Polaritas -V
Detektor Polaritas +V
Pembangkit NRZ+ NRZ
Gambar 3.11. Blok Diagram Decoder HDB-3
Proses perancangan panyandian HDB3
dilakukan dengan metode sistem on chip menggunakan bahasa pemrograman Verilog HDL yang diintegrasikan pada FPGA sebagai implementasi perangakat keras penyandian HDB3. IV. HASIL DAN PEMBAHASAN
Hasil dari perancangan penyandian HDB3 diintegrasikan ke board FPGA menggunakan program aplikasi quartus. Integrasi dimulai dengan compile kode verilog penyandian HDB3 untuk memeriksa jika terjadi kesalahan pemrograman. Setelah itu dilakukan simulasi untuk melihat keluaran hasil rancangan sudah sesuai dengan input yang diberikan. Sebelum diimplementasikan ke board FPGA, dilakukan konfigurasi pin sebagai port input dan output implementasi penyandian HDB3.
Buat design di verilog
Start
Menentukan Device
Save
Kompilasi
Simulasi Generate WaveformSimulaton
Konfigurasi Pin
Download FPGA
Stop Gambar 4.1 Integrasi FPGA
4.1 Encoder 4.1.1 Detektor bit 0
Detektor bit 0 mendeteksi runtun bit 0 jika lebih dari 3 bit. Apabila jumlah bit 0 lebih

Prosiding Seminar Nasional Teknik Elektro & Informatika IT26 SNTEI 2015 PNUP, Makassar, 11 Juni 2015
ISBN: 978-602-18168-0-6 188
dari 3 maka output detektor bit 0 akan berlogika “1” dan sebaliknya akan berlogika “0” jika runtun bit 0 tidak lebih dari 3. Detektor bit-0 digunakan untuk membangkitkan v-bit dan b-bit.
Gambar 4.2 Data NRZ 11000000 (1) dan
Detektor bit 000 (2) 4.1.2 Generator V-bit
Generator V-Bit memiliki fungsi untuk mengubah runtun bit 0 yang lebih dari 3 menjadi bit 1 pada bit 0 yang keempat saat detektor bit-0 berlogika 1.
Gambar 4.3 Data NRZ 11000000 (1) dan Vbit (2)
4.1.3 Generator B-bit
Generator B-bit memiliki fungsi hampir sama dengan V-bit. Tetapi pada B-bit, bit 1 dibangkitkan pada bit pertama setiap 4 digit runtun bit 0 jika jumlah bit 1 data NRZ genap. Sebaliknya, jika jumlah bit 1 data NRZ ganjil, maka B-bit tidak dibangkitkan.
Gambar 4.4 Data NRZ 11000000 (1) dan
B-bit (2)
4.1.4 Pembangkit polaritas Pembangkit polaritas pada encoder HDB3
akan membuat setiap bit 1 berlawanan polaritas. Sedangkan bit 0 yang tidak lebih dari 3 bit tampilkan dengan tegangan 0V. sedangkan V-bit dan B-bit mengikuti polaritas bit 1.
Gambar 4.4 Data NRZ 11000000 (1) dan
Output HDB3 (2)
Data hasil pengujian pada gambar 4.4 menunjukkan setiap bit 1 dengan polaritas yang berlawanan dan bit 0 yang tidak lebih dari 3 dengan level tegangan 0 atau berada tepat pada transisi polaritas positif dan negatif. Sedangkan runtun bit 0 yang lebih dari 3 digantikan oleh runtun bit 000V jika jumlah bit 1 ganjil dan B00V jika genap. 4.2 Decoder 4.2.1 Penyearah Polaritas
Penyearah polaritas sinyal berfungsi untuk mengembalikan polaritas negatif ke positif. Sehingga polaritas sinyal berada pada tegangan 0 dan +V seperti pada Gambar 4.5
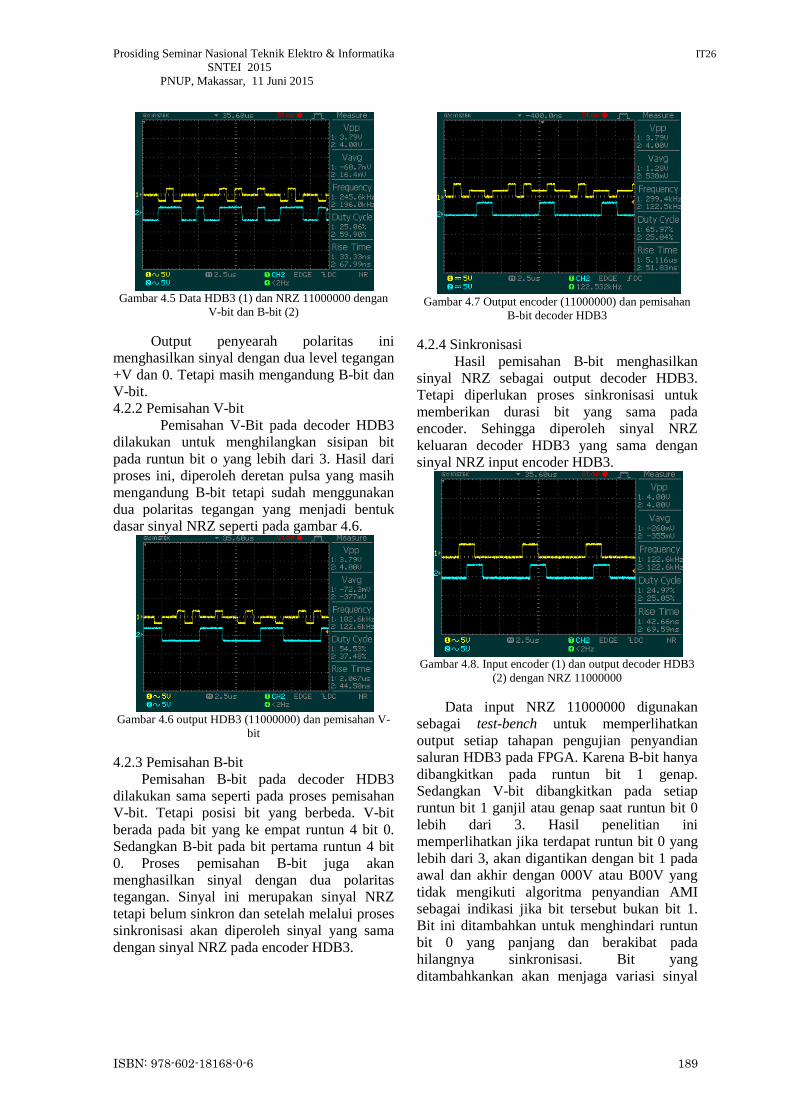
Prosiding Seminar Nasional Teknik Elektro & Informatika IT26 SNTEI 2015 PNUP, Makassar, 11 Juni 2015
ISBN: 978-602-18168-0-6 189
Gambar 4.5 Data HDB3 (1) dan NRZ 11000000 dengan
V-bit dan B-bit (2)
Output penyearah polaritas ini menghasilkan sinyal dengan dua level tegangan +V dan 0. Tetapi masih mengandung B-bit dan V-bit. 4.2.2 Pemisahan V-bit
Pemisahan V-Bit pada decoder HDB3 dilakukan untuk menghilangkan sisipan bit pada runtun bit o yang lebih dari 3. Hasil dari proses ini, diperoleh deretan pulsa yang masih mengandung B-bit tetapi sudah menggunakan dua polaritas tegangan yang menjadi bentuk dasar sinyal NRZ seperti pada gambar 4.6.
Gambar 4.6 output HDB3 (11000000) dan pemisahan V-
bit 4.2.3 Pemisahan B-bit
Pemisahan B-bit pada decoder HDB3 dilakukan sama seperti pada proses pemisahan V-bit. Tetapi posisi bit yang berbeda. V-bit berada pada bit yang ke empat runtun 4 bit 0. Sedangkan B-bit pada bit pertama runtun 4 bit 0. Proses pemisahan B-bit juga akan menghasilkan sinyal dengan dua polaritas tegangan. Sinyal ini merupakan sinyal NRZ tetapi belum sinkron dan setelah melalui proses sinkronisasi akan diperoleh sinyal yang sama dengan sinyal NRZ pada encoder HDB3.
Gambar 4.7 Output encoder (11000000) dan pemisahan
B-bit decoder HDB3 4.2.4 Sinkronisasi
Hasil pemisahan B-bit menghasilkan sinyal NRZ sebagai output decoder HDB3. Tetapi diperlukan proses sinkronisasi untuk memberikan durasi bit yang sama pada encoder. Sehingga diperoleh sinyal NRZ keluaran decoder HDB3 yang sama dengan sinyal NRZ input encoder HDB3.
Gambar 4.8. Input encoder (1) dan output decoder HDB3
(2) dengan NRZ 11000000
Data input NRZ 11000000 digunakan sebagai test-bench untuk memperlihatkan output setiap tahapan pengujian penyandian saluran HDB3 pada FPGA. Karena B-bit hanya dibangkitkan pada runtun bit 1 genap. Sedangkan V-bit dibangkitkan pada setiap runtun bit 1 ganjil atau genap saat runtun bit 0 lebih dari 3. Hasil penelitian ini memperlihatkan jika terdapat runtun bit 0 yang lebih dari 3, akan digantikan dengan bit 1 pada awal dan akhir dengan 000V atau B00V yang tidak mengikuti algoritma penyandian AMI sebagai indikasi jika bit tersebut bukan bit 1. Bit ini ditambahkan untuk menghindari runtun bit 0 yang panjang dan berakibat pada hilangnya sinkronisasi. Bit yang ditambahkankan akan menjaga variasi sinyal
Prosiding Seminar Nasional Teknik Elektro & Informatika IT26 SNTEI 2015 PNUP, Makassar, 11 Juni 2015
ISBN: 978-602-18168-0-6 190
pada runtun bit nol yang lebih dari 3 untuk membedakan awal dan akhir tiap-tiap bit. V. KESIMPULAN
Teknik scrambling dapat mengatasi runtun bit 0 yang panjang pada penyandian AMI dengan memodifikasi runtun bit 0 yang lebih dari 3 dan mengikuti level tegangan bit 1 tetapi tidak mengikuti algoritma AMI. Bit yang disisipkan akan menjaga variasi sinyal pada setiap runtun bit nol yang lebih dari 3 untuk membedakan awal dan akhir tiap-tiap bit. Sehingga memungkinkan untuk proses sinkronisasi.
UCAPAN TERIMA KASIH Pada pelaksanaan penelitian ini penulis
dibantu oleh rekan-rekan dosen mahasiswa Teknik Elektro Politeknik Negeri Ujung pandang. Oleh karena itu penulis mengucapkan terima kasih yang sebesar-besarnya semoga hasil penelitian ini dapat bermamfaat bagi kemajuan ilmu pengetahuan.
REFERENSI 1. Ali, Imran and Ahmad, Ali. 2013. An
Efficient FPGA Based HDB3 Decoding System Using, International Journal of Future Computer and Communication Vol. 2, No. 6.
2. Stalling, William. 1997. Data and Computer Communication. New Jersey: Prentice-Hall International, Inc.
3. Sandige, Ricards. 1990. Modern Digital Design. McGraw-Hill Publishing Company.
4. Stanley, William D. 1994, Operational Amplifier with Linier Integrated Circuit. McGraw-Hill.
5. Winch, Robert G. 1993. Telecommunication Transmission System. Singapura; McGraw-Hill, Inc.
6. Black Box Network Services. 2015. HDB3 Encoding http://www.black-box.de/en-de/page/332/hdb3-encoding

Prosiding Seminar Nasional Teknik Elektro & Informatika TL31 SNTEI 2015 PNUP, Makassar, 11 Juni 2015
ISBN: 978-602-18168-0-6 191
Kestabilan Tegangan Bus Jaringan Distribusi Tenaga Listrik Dengan Alokasi Daya
Reaktif Yang Optimum
Sulhan Bone, Aksan Jurusan Teknik Elektro Politeknik negeri Ujung Pandang
[email protected] Smart Grid and Power System
Abstrak Pemasangan komponen reaktif optimum pada bus system yang mengalami penurunan tegangan (under
voltage), akan dapat menghasilkn kestabilan tegangan bus. Batas toleransi yang diperbolehkan untuk suatu nilai tegangan Vn ± 5% dari nilai nominalnya. Nilai tegangan yang konstan akan mengoptimalkan unjuk kerja dari peralatan listrik yang digunakan konsumen. Tegangan operasional bus, sudut magnitude tegangan , arus, daya dan factor daya adalah besaran-besaran pada saluran distribusi yang diamati untuk keperluan operasi system tenaga listrik.. Banyaknya beban industri ini membuat pasokan daya yang dibutuhkan semakin besar. Salah satu contoh penyulang pada Gardu Induk daya yang melayani berbagai beban industri kecil, industri besar, beban perumahan, beban rumah toko dan beban rumah kantor adalah penyulang Paccerakkang. Penurunan tegangan (under voltage) merupakan salah satu bentuk ketidakstabilan tegangan system dalam menyalurkan energy listrik ke konsumen. Penurunan tegangan disebabkan oleh terjadinya perubahan daya aktif maupun reaktif secara tiba-tiba, pasokan daya yang tidak memadai, maupun gangguan yang terjadi pada system itu sendiri. Pemasangan kapasitor bank/daya reaktif optimum pada bus merupakan salah satu metode yang dilakukan untuk menstabilkan tegangan system. Dengan tools program ETAP 6.00 sistem dristibusi penyulangan (penyulang Paccerakkang) Gardu Induk Daya dapat disimulasi. Hasil simulasi menunjukkan bahwa ketidakstabilan tegangan penyulang Paccerakang terjadi pada 9 bus dengan menganalisis nilai operasional tegangan dibawah 95 % (batas ±5% Vnom), sudut magnitude dibawah atau diatas 0,1 % dan factor daya di bawah 0,85. Untuk memperbaiki kestabilan tegangan maka ditempatkan daya reaktif optimum sebesar 150 kvar pada salah satu bus (bus 47). Maka diperoleh perubahan kestabilan tegangan pada bus tersebut yaitu operasional tegangan menjadi 96,6 % (±3,4% Vnom), sudut magnitude tegangan -2,8 dan factor daya sebesar 0,99 . Kata Kunci : Ketidakstabilan tegangan, daya reaktif, optimum,, ETAP, kestabilan tegangan
I. PENDAHULUAN Proses penyaluran energi listrik sari
pembangkit (PLN) kekonsumen (beban listrik), keandalan system merupakan salah satu factor yang selalu diperhatikan oleh pihak produsen (PLN). Dalam penyaluran energi listrik, ada beberapa masalah yang dihadapi antara lain kestabilan tegangan, jatuh tegangan, faktor daya rendah, rugi-rugi daya, kontinuitas pelayanan, sering terjadi pemutusan karena gangguan maupun hal-hal yang direncanakan. Biasanya kontinuitas pelayanan terbaik diprioritaskan pada beban-beban listrik yang dianggap vital seperti pusat-pusat pemerintahan, pusat industri, rumah sakit, dan tempat-tempat terpenting lainnya.
Gardu induk daya yang terdiri dari beberapa penyulang system distribusi tenaga listrik melayani berbagai konsumen listrik antar lain industri kecil, industri besar , perumahan,
rumah toko, dan perkantoran. Dengan keberadaan konsumen industri otomatis membuat pasokan daya listrik yang dibutuhkan pun semakin besar. Oleh karena itu kontinuitas pelayanan dan kualitas daya listrik merupakan faktor yang harus diperhatikan oleh pihak gardu induk daya dalam menyalurkan energi listriknya. Kualitas daya listrik yang baik antara lain meliputi kapasitas daya yang memadai, kestabilan daya listrik yang selalu konstan, dan frekuensi yang selalu konstan. Kestabilan tegangan merupakan salah satu bentuk dari kestabilan sistem tenaga listrik dalam melakukan penyaluran energi listrik ke konsumen. Kestabilan tegangan ini bisa disebabkan oleh terjadinya perubahan beban aktif maupun reaktif secara tiba-tiba, pasokan daya yang tidak memadai maupun gangguan yang terjadi pada sistem itu sendiri. Oleh karean itu masalah kestabilan tegangan/daya

Prosiding Seminar Nasional Teknik Elektro & Informatika TL31 SNTEI 2015 PNUP, Makassar, 11 Juni 2015
ISBN: 978-602-18168-0-6 192
reaktif maksimum merupakan masalah operasi sitem tenaga listrik yang perlu mendapat penanganan tersendiri. Pengaturan kestabilan tegangan/daya reaktif maksimum erat kaitannya dengan pengaturan daya reaktif dalam sistem .mengatur kestabilan tegangan pada suatu titik bus dalam sistem akan lebih mudah di titik bus tersebut ada sumber daya reaktif yang bisa diatur.
Sumber daya reaktif dapat berupa kapasitor yang dipasang secara paralel pada penghantar penyulang distribusi primer radial. Pemasangan tersebut menyebabkan arus yang mengalir pada penghantar menjadi lebih kecil, sehingga akan mengurangi besarya rugi-rugi daya dan jatuhnya tegangan pada bus. Keuntungan yang dapat diperoleh dari pemasangan antara lain : perbaikan faktor daya , pengurangan rugi-rugi daya, penurunan jatuh tegangan (tegangan stabil), daya reaktif yang optimum, dan penambahan kapasitas penyaluran daya.
Penelitian ini bertujuan menempatkan / mengalokasikan daya reaktif yang tepat (optimum) dalam system sehingga bias menghasilkan kestabilan tegangan pada system distribusi tenag listrik yaitu dengan rugi-rugi daya distribusi yang minimum dan tegangan listrik yang stabil pada bus.
II. TINJAUAN PUSTAKA Stabilitas tegangan adalah kemampuan
sistem untuk menjaga tegangan tetap pada keadaan mantap dalam batas range (Vn ± 5% Vn) yang telah ditetapkan setelah terjadi gangguan pada sistem tersebut. Dalam sistem tenaga listrik, ada beberapa gangguan yang menyebabkan ketidakstabilan tegangan (voltage instability). Suatu sistem memasuki situasi ketidakstabilan tegangan ketika terjadi gangguan, meningkatnya permintaan beban atau perubahan dalam kondisi sistem yang mengakibatkan perubahan yang drastis dan tidak terkontrolnya penurunan tegangan. Penyebab utama ketidakstabilan tegangan adalah ketidakmampuan suatu sistem tenaga listrik untuk memenuhi permintaan daya reaktif. Inti dari permasalahannya adalah penurunan tegangan yang terjadi ketika daya aktif dan reaktif mengalir melalui reaktansi induktif yang dihubungkan dengan jaringan distribusi/transmisi. Kriteria kestabilan untuk suatu tegangan dapat dipenuhi jika besarnya
tegangan pada setiap bus dalam sistem yang sedang beroperasi akan meningkatkan besarnya seiring dengan meningkatnya injeksi daya reaktif pada bus yang sama. Suatu sistem dikatakan tidak stabil jika dalam sistem tersebut sedikitnya terdapat sebuah bus yang mengalami penurunan besarnya tegangan bersamaan pada saat injeksi daya reaktif diberikan pada bus yang sama. Atau dengan kata lain tegangan suatu sistem stabil jika sensivitas V-Q nya positif untuk setiap bus dan menjadi tidak stabil jika sensivitas V-Q nya negatif setidaknya pada sebuah bus. 2.1. Hal Yang Mempengaruhi Pengaturan
Tegangan Dalam penyediaan tenaga listrik bagi
para pelanggan, tegangan yang konstan, frekuensi yang konstan, merupakan salah satu syarat utama yang harus dipenuhi. Oleh karenanya masalah pengaturan tegangan merupakan masalah operasi sistem tenaga listrik yang perlu mendapat penanganan tersendiri. Pengaturan tegangan erat kaitannya dengan pengaturan daya reaktif dalam sistem.
Sistem tenaga listrik terdiri dari banyak GI dan pusat listrik. Dalam setiap GI maupun pusat listrik terdapat simpul (bus). Tegangan dari bus GI dan tegangan dari bus di pusat listrik bersama-sama membentuk profil tegangan sistem. Berbeda dengan frekuensi yang sama dalam semua bagian sistem tegangan tidak sama dalam setiap bagian sistem , sehingga pengaturan tegangan adalah lebih sulit dibandingkan dengan frekuensi . kalau frekuensi praktis hanya dipenuhi oleh daya nyata MW dalam sistem , dilain pihak tegangan dipengaruhi oleh : arus penguat generator, daya reaktif beban , daya reaktif yang didapat dalam sistem (selain generator), misalnya dari kondensator dan dari reaktor, posisi tap transformator. Mengatur tegangan pada suatu titik (bus) dalam sistem akan lebih mudah apabila dititik bus tersebut ada sumber daya reaktif yang bisa diatur, hal ini juga merupakan hal yang berbeda dengan pengaturan frekuensi, karena frekuensi dapat diatur dengan mengatur sumber daya nyata yang ada dimana saja dalam sistem. Dalam sistem tenaga listrik ada dua veriabel yang dapat diatur secara variabel, disebut variabel pengatur (control variabel) yaitu daya nyata (MW) dan daya reaktif (MVAR). Seperti telah diuraikan diatas,

Prosiding Seminar Nasional Teknik Elektro & Informatika TL31 SNTEI 2015 PNUP, Makassar, 11 Juni 2015
ISBN: 978-602-18168-0-6 193
pengatur daya nyata akan mempengaruhi frekuensi, sedangkan pengaturan daya reaktif akan mempengaruhi tegangan. Butir a sampai d tersebut diatas adalah cara untuk mengatur daya reaktif yang harus disediakan dalam sistem. Pengaturan daya reaktif utama akan mempengaruhi tegangan sistem. Secara singkat dapat dikatakan bahwa: MW merupakan variabel pengatur frekuensi, MVAR merupakan variabel pengatur tegangan. 2.2. Variabel Pengatur dan Pengganggu Beban dalam sistem mengambil daya reaktif dan daya aktif dari sistem. Beban tidak bisa diatur karena tergantung keadaan kebutuhan banyak pelanggan yang mempergunakan tenaga listrik dari sistem. Secara pengetahuan kontrol,beban merupakan variabel pengganggu (disturbance variable). Disamping variabel pengatur dan variabel penganggu tersebut diatas ada variabel yang diatur dan dapat dibaca dengan mudah dari alat ukur, variabel yang diatur dalam sistem adalah tegangan dan frekuensi. Dalam operasi sistem tenaga listrik diinginkan agar variable yang diatur mempunyai nilai konstan walaupun ada perubahan beban (variable pengganggu). Untuk mempertahankan variable yang diatur pada nilai konstan, diperlukan pengatur dan ini berarti harus ada perubahan nilai dari variable pengatur. Untuk yang terdiri dari n buah bus, secara umum ada 2x n variable pengatur dalam sistem yaitu pembangkitan daya nyata dan daya reaktif pada setiap bus. Hal ini dapat dinyatakan oleh sebuah vektor pengatur.
P =
⎣⎢⎢⎢⎢⎢⎡𝑃𝑃𝐺𝐺1𝑃𝑃𝑄𝑄1
.
.
.𝑃𝑃𝐺𝐺𝑛𝑛𝑃𝑃𝑄𝑄𝑛𝑛⎦
⎥⎥⎥⎥⎥⎤
(2.1)
Keterangan : PG1 = daya nyata yang dibangkitkan pada bus no 1 PQ1 = daya reaktif yang dibangkitkan pada bus no 1 Selanjutnya untuk variable pengganggu dapat pula dinyatakan dengan sebuah vektor pengganggu (disturbance vector)
g =
⎣⎢⎢⎢⎢⎢⎡𝑃𝑃𝑏𝑏1𝑄𝑄𝑏𝑏1
.
.
.𝑃𝑃𝑏𝑏𝑛𝑛𝑄𝑄𝑏𝑏𝑛𝑛⎦
⎥⎥⎥⎥⎥⎤
(2.2)
Keterangan : Pb1 = daya nyata dari beban bus no 1 Qb1 = daya reaktif dari beban bus no 1 Untuk variable yang diatur, telah disebutkan frekuensi dan tegangan , karena frekuensi praktis diatur oleh daya reaktif, namun untuk keperluan analisis aliran daya dan analisis profil tegangan sistem dalam keadaan steady state dimana frekuensi tidak lagi berubah . oleh karenanya variable yang diatur dalam bentuk vektor yang diatur dapat dinyatakan sebagai berikut :
x =
⎣⎢⎢⎢⎢⎢⎡𝛿𝛿1
|𝑉𝑉1|...𝛿𝛿𝑛𝑛
|𝑉𝑉𝑛𝑛|⎦⎥⎥⎥⎥⎥⎤
(2.3)
Keterangan : δ 1 = sudut fasa tegangan di bus no 1 |𝑉𝑉𝑛𝑛| = nilai tegangan di busno 1Sampai dengan bus no. N didapat variable yang diatur δ 1 dan |𝑉𝑉𝑛𝑛|. 2.3 Alokasi Daya Reaktif Yang Optimum
Alokasi daya reaktif yang tepat dalam sistem tenaga listrik dapat menghasilkan kondisi optimum dalam sistem yaitu kondisi dengan rugi-rugi jaringan yang minimum. Tidak semua bus dalam sistem dapat menghasilkan daya reaktif, sedangkan rugi-rugi jaringan dipengaruhi letak beban dalam sistem , hal ini merupakan persoalan utama dalam menyelesaikan alokasi daya reaktif yang optimum. Setiap perubahan variable pengatur maupun perubahan pengganggu (beban) disetiap bus dalam sistem akan memberikan pengaruh terhadap variable yang diukur yaitu besar tegangannya beserta besar fasanya di semua bus dalam sistem yang hubungannya tergantung kepada matriks-matriks sensitivitas dan besarnya daya reaktif pada bus-bus yang mempunyai sumber daya reaktif yang dapat diatur, maka dapat diperoleh profil tegangan

Prosiding Seminar Nasional Teknik Elektro & Informatika TL31 SNTEI 2015 PNUP, Makassar, 11 Juni 2015
ISBN: 978-602-18168-0-6 194
Mulai
Penyiapan Data dan Validasi Software Etap
Masukkan Data Saluran, Trafo, Beban untuk
Simulasi aliran daya
Proses Simulasi dengan load flow analisis
Konvergen
Periksa dan perbaiki data
Lakukan pemeriksaan nilai d-V pada setiap bus untuk
penentuan stabilitas tegangan
Proses simulasi penempatan kapasitor shunt pada bus yang
tidak stabil tegangannya
Konvergen
Tegangan Bus Stabil
Selesai
Periksa Nilai Kapasitor shunt dan nilai d-v
sistem menimbulkan rugi-rugi minimal dalam sistem. Variable pengatur yang dapat mengatur daya reaktif dalam sistem adalah : a. Arus penguat generator b. Kapasitor dan reaktor variable pada bus
tertentu dalam sistem c. Posisi tap dari transformator.
III. METODE PENELITIAN 3.1. Blok Diagram
Gambar 1. Blok Diagram analisis kestabilan tegangan bus
Nilai 𝛿𝛿-V dan factor daya digunakan untuk memeriksa kondisi bus setelah simulasi program etap 6.00 nilai 𝛿𝛿-V positif pada setiap bus tenaga listrik menyatakan bahwa pada bus
tersebut mempunyai tegangan yang stabil baik saat terjadi gangguan atau kondisi normal. Nilai 𝛿𝛿-V negative pada salah satu bus menandakan bahwa keseluruhan system dalam kondisi tegangan tidak stabil saat ada gangguan maupun kondisi normal. Oleh karena itu dilakukan pemasangan pada bus yang mengalami/mempunyai nilai 𝛿𝛿-V negative dengan kapasitas yang dipasang hasil dari perhitungan. Kemudian dilakukan kembali simulasi program, untuk menentukan kembali kestabilan tegangan pada setiap bus. 3.2 Tahap Pelaksanaan Tahap 1. Pengumpulan Data
Sumber data dari PT PLN (persero) Sultanbatara cabang Makassar monginsidi dan PT PLN (persero) wilayah rayon Makassar timur dan jenis data adalah data sekunder jaringan distribusi tegangan menengah 20 kV yang dilayani oleh gardu induk daya : 1. Single line diagram dan jaringan distribusi
tegangan menengah 20kV penyulang yang dilayani oleh gardu induk daya.
2. Data pembebanan tiap-tiap gardu trafo distribusi tiap penyulang gardu induk daya.
3. Data pengukuran masing-masing arus fasa pada sekunder trafo gardu distribusi tiap penyulang gardu induk daya.
4. Data pengukuran masing-masing tegangan phasa dan lise pada sekunder trafo gardu distribusi tiap penyulang gardu induk daya.
5. Data desain peralatan seperti transformator,penghantar yakni : a. Penghantar : jurusan, penampang,
dan jenis penghantar b. Tranformator : kapasitas trafo
perbandingan transformasi tegangan. Tahap 2. Validasi Software Etap 6.00
Validasi program ETAP 6.00 yaitu membandingkan contoh simulasi jaringan hasil program Etap 6.00 dengan hasil program yang diperoleh dari buku referensi. Validasi ini diperlukan untu menguji apakah program yang akan dipergunakan Valid dan sesuai dengan buku referensi. Tahap 3. Perancangan Simulasi Sistem Distribusi Tenaga Listrik

Prosiding Seminar Nasional Teknik Elektro & Informatika TL31 SNTEI 2015 PNUP, Makassar, 11 Juni 2015
ISBN: 978-602-18168-0-6 195
Melakukan simulasi aliran daya pada program ETAP 6.00 untuk menganalisis aliran daya aktif dan reaktif pada jaringan distribusi tegangan rendah, profil tegangan disetiap busbar pembebanan dan efesiensi tranformator. Rugi-rugi daya aktif dan reaktif antara saluran dan trafo distribusi, kurva P-Q-V- 𝛿𝛿 sehingga dapat ditentukan bus yang mengalami ketidakstabilan tegangan saat kondisi normal dan kondisi adanya gangguan. Tahap 4. Perhitungan dan Penempatan Berdasarkan data-data hasil aliran daya, maka dapat dihitung besarnya kapasitor shunt yang harus dipasang pada bus yang mengalami ketidaktabilan tegangan/daya reaktif maksimum. Hasil simulasi dengan penempatan kapasitor shunt akan menunjukkan perbaikan kestabilan tegangan/daya reaktif optimum pada bus yang mengalami ketidakstabilan tegangan tersebut. Tahap 5. Pembuatan Laporan Akhir dan Jurnal
Sebagai pertanggungjawaban atas penilitian yang telah dilaksanakan maka dibuat laporan akhir dan jurnal ilmiah yang akan dipublikasikan pada seminar dan jurnal yang terakditasi, guna menyebarluaskan ilmu yang telah diperoleh dan dikembangkan. IV. HASIL dan PEMBAHASAN 5.1. Validasi Program
Validasi program dilakukan dengan cara membandingkan hasil perhitungan yang telah diketahui dari buku “ Power System Analisys” halaman 212 (Saadat, 1999) dan buku ”Sistem Tenaga Listrik ” halaman 13 (Cekmas Cekdin, 2006) program Matlab dibandingkan dengan program ETAP powerstation 6.0 yang dipergunakan pada penelitian ini. Data dan konfigurasi jaringan sebagai contoh simulasi validasi program seperti ditunjukkan pada gambar 2 berikut:
G
Bus 1
Bus 3
Bus 2
256.6 MW
138.6 MW 45.2 MVAR
110.2 MVARSLACK BUSV1=1,05/0°
BASE = 100 MVA
Z12 = 0.02+j0.04 pu
Z13 = 0.01+j0.03 pu Z23 = 0.0125+j0.025 pu
G
Gambar 2. Konfigurasi jaringan untuk validasi program Data impedansi dalam satuan per unit pada saluran adalah : z12 = 0,02 + j0,04 pu z13 = 0,01 + j0,03 pu z23 = 0,0125 + j0,025 pu Admintansi pada saluran adalah : Y12 = 1/z12 = 10 –j20 Y13 = 1/z13 = 10 – j30 Y23 = 1/z23 = 16 – j32 Data beban dalam satuan per unit adalah :
( ) pujjs 102,1566,2100
2,1106,2562 −−=
+−=
( ) pujjs 452,0386,1
1002,456,138
3 −−=+
−=
Dengan metode penyelesaian gauss seidel, Penyelesaian Vi secara iterasi digunakan persamaan :
∑∑+−
=ij
kjij
i y
VyVi
jQiPi
V)(
Untuk aliran arus dihitung dengan menggunakan persamaan berikut:
( ) iijiij
ilij
VyVVyIII
0
0
+−=
+=
( ) jjijij
jlji
VyVVyIII
0
0
+−=
+−=
Untuk daya kompleks antara bus dihitung dengan menggunakan persamaan berikut :

Prosiding Seminar Nasional Teknik Elektro & Informatika TL31 SNTEI 2015 PNUP, Makassar, 11 Juni 2015
ISBN: 978-602-18168-0-6 196
( ) *0
*****iiiijjiiijiij yVVyVVVIVS +−==
( ) *0
*****jjjjiijjjijji yVVyVVVIVS +−==
Dan untuk rugi-rugi daya dalam saluran dihitung dengan menggunakan persamaan berikut : jiijLij SSS +=
Konfigurasi jaringan untuk validasi dari kedua buku referensi dibuat dengan menggunakan program Matlab dan dijalankan, sehingga diperoleh hasil program seperti ditunjukkan pada gambar 3.
Bus 1
Bus 3
256.6 MW
138.6 MW 45.2 MVAR
110.2 MVARSLACK BUS
V1=1,05/0°BASE = 100 MVA
199.5
84
191.0
67.0
210.0
105.0
205.090.0 66.4 44.8
65.6
43.2
(8.5)
(17.0)
(5.0)
(15.0)
(0.8)
(1.6)
4009.5
189
G
Bus 2
Gambar 3. Hasil aliran daya dari buku referensi (4)
Untuk mendapatkan validasi antara
hasil program dari buku referensi dan hasil program ETAP powerstation 6.0 yang digunakan pada penelitian ini, maka harus dibuat model contoh validasi tersebut dalam program ETAP berdasarkan nilai data contoh validasi. Gambar model contoh validasi pada program ETAP ditunjukkan pada gambar 4.
Gambar 4. Hasil aliran daya dari program ETAP
Tabel 1. Data hasil Aliran daya dari program ETAP
Perbandingan hasil pengujian antara
program Matlab (buku referensi) dan program ETAP powerstation 6.0 tersebut ditunjukkan pada tabel 2. Tabel 2. Perbandingan hasil aliran daya buku
referensi (program Matlab) dengan hasil program ETAP dari penelitian
Dari program aliran daya yang dilakukan seperti yang terdapat pada tabel 2, hasil buku referensi dan hasil program ETAP 6.0, diperoleh selisih berkisar antara 0,004 MW - 0,05 MW untuk daya aktif dan 0,015 MVAR- 0,024 MVAR untuk daya reaktif. Hasil kedua program tersebut menunjukkan perbedaan sangat kecil, dengan demikian program yang digunakan dalam penelitian ini sudah valid. 4.2. Penyulang pada Gardu Induk Daya
Gardu Induk Daya dalam melayani beban konsumen mempunyai beberapa penyulang antara lain : penyulang Sanrangan, penyulang Sanmaru, penyulang Paccerakkang, penyulang Baddoka, penyulang Golf, penyulang Kima, penyulang Kapasa, dan penyulang Effem. Penyulang – penyulang ini melayani berbagai konsumen. Penyulang Paccerakkang melayani beban konsumen industry kecil, perumahan,

Prosiding Seminar Nasional Teknik Elektro & Informatika TL31 SNTEI 2015 PNUP, Makassar, 11 Juni 2015
ISBN: 978-602-18168-0-6 197
took, dan kantor. Penyulang Baddoka melayani beban industry besar, beban industry kecil, perumahan, toko dan kantor. Penyulang Kima melayani beban industry besar, industry kecil, kantor. Penyulang Kapasa melayani beban industry besar, industry kecil,perumahan, dan kantor. Penyulang Effem melayani beban industry besar, industry kecil, kantor. Penyulang Golf melayani beban industry besar, industry kecil, kantor. Data yang dipilih sebagai data analisis penelitian ini adalah penyulang Paccerakkang. Adapun lokasi yang dilayani oleh penyulang Paccerakkang ditunjukkan pada gambar 5.
Gambar 5. Lokasi wilayah layanan penyulang
Paccerakkang Data penyulang Paccerakkang yang
diperoleh yaitu data beban tiap fasa, panjang penghantar, luas penampang penghantar dan bahan penghantar yang digunakan yang ditunjukkan pada tabel 3 dan lampiran 1 berikut ini
Tabel 3 Hasil pengukuran beban trafo penyulang paccerakkang
4.3. Sistem Tegangan Pada Penyulang
Paccerakkang Dari data penelitian yang diperoleh di
PLN Area Makassar yaitu data triwulan II Penyulang Paccerakkang pada tahun 2014. Berikut adalah Simulasi diagram satu garis system penyulang gardu induk daya dengan program ETAP 6.00 ditunjukkan pada gambar 7. Hasil simulasi program ETAP 6.00 pada system penyulang Paccerakkang gardu induk

Prosiding Seminar Nasional Teknik Elektro & Informatika TL31 SNTEI 2015 PNUP, Makassar, 11 Juni 2015
ISBN: 978-602-18168-0-6 198
daya diperoleh beberapa bus yang mengalami penurunan tegangan (under voltage) di bawah standar normal atau standar kritis ditunjukkan pada table 4. Bus-bus yang mengalami kondisi kritis penurunan tegangan tersebut akan mempunyai tegangan dibawah Vn ±5% Vnom dan sudut magnitude tegangan (δ) bernilai negative atau di bawah nol dan factor daya di bawah 0,85 seperti ditunjukkan pada table 5.
Tabel 4. Data bus yang mengalami kondisi kritis (penurunan tegangan)
4.4. Pemasangan Daya Reaktif Optimum
Kondisi bus yang mengalami penurunan tegangan dapat diperbaiki dengan cara menempatkan (memasang) kapasitor bank atau daya reaktif yang optimum agar prosentase tegangan, sudut magnitude tegangan serta factor daya pada bus tersebut dapat meningkat di atas standar. Berdasarkan table 5 maka diambil contoh bus 47 yang mengalami penurunan tegangan sebesar – 5,3 % dengan sudut magnitude tegangan sebesar – 2,5 dan factor daya 0,80, sehingga pada bus 47 tersebut akan dipasang daya reaktif optimum (kapsitor bank) sebesar 50 kvar/perphasa atau 150 kvar/3 phasa seperti ditunjukkan pada gambar 7
Tabel 5. Nilai tegangan dan sudut magnitude tegangan pada bus kondisi kritis
Gambar 7. Bus 47 dipasang daya reaktif optimum (kapasitor bank)
Daya reaktif optimum sebesar 150 kvar
dipasang berdasarkan hasil perhitungan sebagai
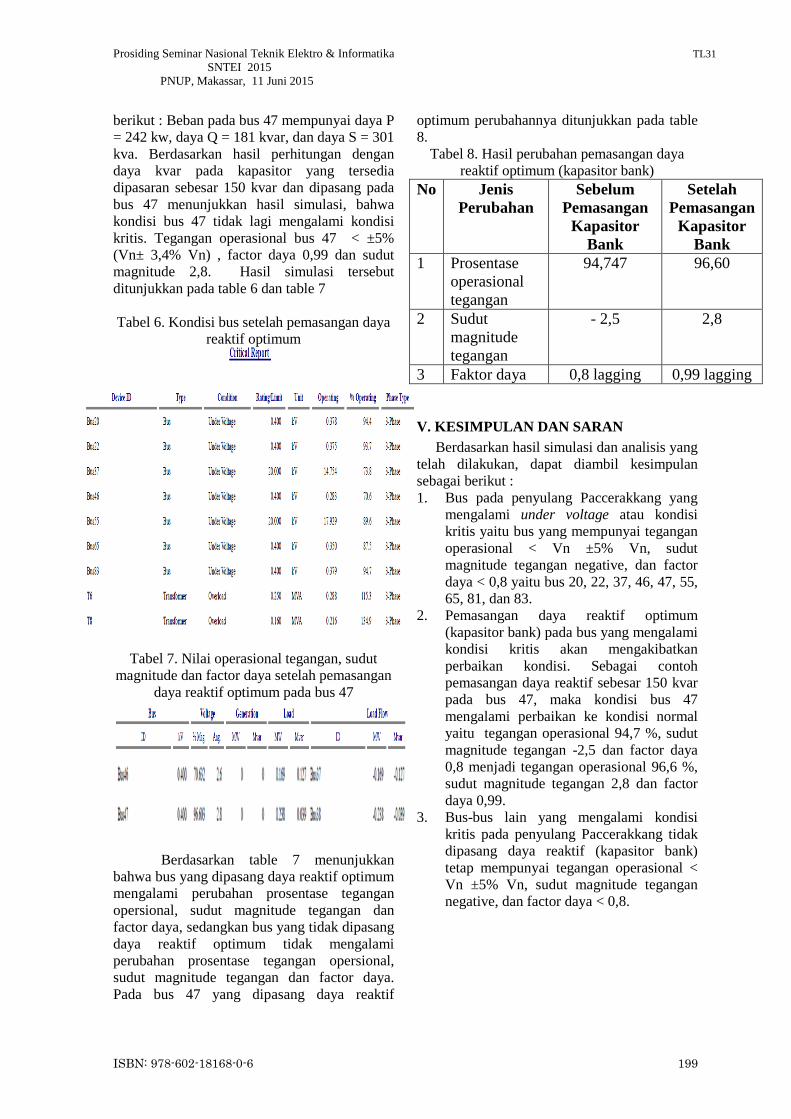
Prosiding Seminar Nasional Teknik Elektro & Informatika TL31 SNTEI 2015 PNUP, Makassar, 11 Juni 2015
ISBN: 978-602-18168-0-6 199
berikut : Beban pada bus 47 mempunyai daya P = 242 kw, daya Q = 181 kvar, dan daya S = 301 kva. Berdasarkan hasil perhitungan dengan daya kvar pada kapasitor yang tersedia dipasaran sebesar 150 kvar dan dipasang pada bus 47 menunjukkan hasil simulasi, bahwa kondisi bus 47 tidak lagi mengalami kondisi kritis. Tegangan operasional bus 47 < ±5% (Vn± 3,4% Vn) , factor daya 0,99 dan sudut magnitude 2,8. Hasil simulasi tersebut ditunjukkan pada table 6 dan table 7 Tabel 6. Kondisi bus setelah pemasangan daya
reaktif optimum
Tabel 7. Nilai operasional tegangan, sudut magnitude dan factor daya setelah pemasangan
daya reaktif optimum pada bus 47
Berdasarkan table 7 menunjukkan
bahwa bus yang dipasang daya reaktif optimum mengalami perubahan prosentase tegangan opersional, sudut magnitude tegangan dan factor daya, sedangkan bus yang tidak dipasang daya reaktif optimum tidak mengalami perubahan prosentase tegangan opersional, sudut magnitude tegangan dan factor daya. Pada bus 47 yang dipasang daya reaktif
optimum perubahannya ditunjukkan pada table 8.
Tabel 8. Hasil perubahan pemasangan daya reaktif optimum (kapasitor bank)
No Jenis Perubahan
Sebelum Pemasangan
Kapasitor Bank
Setelah Pemasangan
Kapasitor Bank
1 Prosentase operasional tegangan
94,747 96,60
2 Sudut magnitude tegangan
- 2,5 2,8
3 Faktor daya 0,8 lagging 0,99 lagging V. KESIMPULAN DAN SARAN
Berdasarkan hasil simulasi dan analisis yang telah dilakukan, dapat diambil kesimpulan sebagai berikut : 1. Bus pada penyulang Paccerakkang yang
mengalami under voltage atau kondisi kritis yaitu bus yang mempunyai tegangan operasional < Vn ±5% Vn, sudut magnitude tegangan negative, dan factor daya < 0,8 yaitu bus 20, 22, 37, 46, 47, 55, 65, 81, dan 83.
2. Pemasangan daya reaktif optimum (kapasitor bank) pada bus yang mengalami kondisi kritis akan mengakibatkan perbaikan kondisi. Sebagai contoh pemasangan daya reaktif sebesar 150 kvar pada bus 47, maka kondisi bus 47 mengalami perbaikan ke kondisi normal yaitu tegangan operasional 94,7 %, sudut magnitude tegangan -2,5 dan factor daya 0,8 menjadi tegangan operasional 96,6 %, sudut magnitude tegangan 2,8 dan factor daya 0,99.
3. Bus-bus lain yang mengalami kondisi kritis pada penyulang Paccerakkang tidak dipasang daya reaktif (kapasitor bank) tetap mempunyai tegangan operasional < Vn ±5% Vn, sudut magnitude tegangan negative, dan factor daya < 0,8.
Prosiding Seminar Nasional Teknik Elektro & Informatika TL31 SNTEI 2015 PNUP, Makassar, 11 Juni 2015
ISBN: 978-602-18168-0-6 200
DAFTAR PUSTAKA 1. Andi M Nur Putra, Arfita Yuana
Dewi,januari 2013.“Studi Analisa Kestabilan Tegangan Sistem 150 kV Berdasarkan Perubahan Tegangan (Aplikasi PT.PLN Batam”, Jurnal Elektro ITP, Volume 2 no 1
2. David L Flaton, 1988, “ Distribution Sistem Losses Calculated By Present Loading” IEEE Transaction On Power system Vol 3, No.3 August 1988.
3. Djiteng Marsudi, 2006, “ Operasi Sistem Tenaga Listrik” ,Yogyakarta Penerbit Graha Ilmu
4. Hadi Saadat, 1999, “ Power System Analysis “, McGraw Hill
5. Khaireza Hadi, 2011, “ Penentuan Batas Tegangan Steady State Dengan Menggunakan Kurva P - Q pada Tegangan Beban Sensitif”, Proceding Seminar Tugas Akhir Jurusan Teknik Elektro FTI-ITS
6. Pradana Putradewa Jayawardana, Hermawan, Susatyo Handoko, 2012, “ Analisis Pengaruh Penempatan Pembangkit Terdistribusi Terhadap Kestabilan Tegangan Pada Sistem Distribusi” Transient Vol 1 No.4 4 Desember 2012
7. Tutuk Agung Sembogo, 2011. “Studi Perbaikan Stabilitas Tegangan Kurva P-V Pada Sistem Jawa Bali 500kV Dengan Pemasangan Kapasitor Bank Menggunakan Teori Sensivitas“ , Proceding Seminar Tugas Akhir Jurusan Teknik Elektro FTI-IT

Prosiding Seminar Nasional Teknik Elektro & Informatika TE45 SNTEI 2015 PNUP, Makassar, 11 Juni 2015
ISBN: 978-602-18168-0-6 201
Deteksi Denyut Jantung dengan Metode Sensor Pulsh Berbasis Ardiuno
Muhammad Nurdin1), Nur Aminah2), Syahrir3), Fadlan Djamil4), Musyawira Fitri Hamdani5) 1,2,3Dosen D3Teknik Elektro Program Studi Teknik Elektronika Politeknik Negeri Ujung Pandang
Email: [email protected], [email protected], [email protected] 4, 5Mahasiswa D3 Teknik Elektro Program Studi Teknik Elektronika Politeknik Negeri Ujung Pandang
Email: [email protected], [email protected]
Abstrak Monitoring jantung secara terus-menerus sangat penting dilakukan mengingat tubuh kita secara terus-
menerus melakukan sirkulasi darah ke seluruh organ tubuh. Dengan mengetahui denyut jantung, kita dapat mengetahui kondisi kesehatan seseorang. Cara termudah untuk mengetahui denyut jantung seseorang adalah dengan meraba denyut nadi. Dengan cara ini kita dapat mengukur jumlah denyut yang terjadi dalam 1 menit. Pengukuran dengan cara ini tidak menghasilkan hasil yang real. Dari beberapa titik pengukuran detak jantung, terdapat persentase error yang berbeda pada titik-titik pengukuran. Dari data pengukuran dapat diamati bahwa pada jempol terdapat error sebesar 10%. Pada jari telunjuk terdapat error sebesar 0.47%, lalu pada jari tengah terdapat error sebesar 6.20%, kemudian pada jari manis terdapat error sebesar 1.42% dan pada jari kelingking terdapat error sebesar 11.42%. Sehingga dapat disimpulkan bahwa titik pengukuran yang baik untuk tahap pengujian selanjutnya untuk alat pendeteksi jumlah detak jantung ini adalah pada jari telunjuk.
Kata Kunci: Denyut Jantung, Sensor Pulsh, Ardiuno I. PENDAHULUAN
Jantung merupakan organ terpenting dalam tubuh manusia, karena jantung merupakan organ utama yang mensirkulasikan darah ke seluruh tubuh. Jantung memompakan darah ke seluruh tubuh sesuai dengan jumlah yang dibutuhkan oleh tubuh. Udara yang dihirup oleh paru-paru, dihantarkan darah menuju jantung, kemudian jantung dipompa keseluruh tubuh, terutama pada otot yang bekerja. Makin banyak otot yang bekerja, makin banyak kebutuhan oksigen, makin besar kekerapan denyut jantung kita perlukan. Monitoring jantung secara terus-menerus sangat penting dilakukan mengingat tubuh kita secara terus-menerus melakukan sirkulasi darah ke seluruh organ tubuh.
Dengan mengetahui denyut jantung, kita dapat mengetahui kondisi kesehatan seseorang. Cara termudah untuk mengetahui denyut jantung seseorang adalah dengan meraba denyut nadi. Dengan cara ini kita dapat mengukur jumlah denyut yang terjadi dalam 1 menit. Pengukuran dengan cara ini tidak menghasilkan hasil yang real. Dalam bidang kedokteran digunakan alat berupa stetoskop yaitu untuk mendengar suara
jantung dan pernapasan, meskipun dia juga digunakan untuk mendengar intestine dan aliran darah dalam arteri dan "vein", kekurangan pada alat ini tingkatan suara sangat rendah, membuat diagnosis sulit. Pada umumnya, pengukuran denyut nadi dapat dilakukan pada sembilan titik yaitu arteri radialis, arteri brakhialis, arteri carotis communis, arteri femoralis, arteri dorsalis pedis, arteri popolitea, arteri temporalis, arteri apical, arteri tibialis posterior.
Dari beberapa titik pengukuran tersebut, bagian tubuh yang memiliki arteri radialis merupakan titik pengukuran yang baik. Dimana pada arteri tesebut, tekanan darah dapat dirasakan hingga 30-38 mmHg serta tekanan nadi hingga 5mmHg.

Prosiding Seminar Nasional Teknik Elektro & Informatika TE45 SNTEI 2015
PNUP, Makassar, 11 Juni 2015
ISBN: 978-602-18168-0-6 202
Gambar 1. Tekanan darah dan tekanan nadi tubuh
manusia. [4]
Tabel 1. Spesifikasi Denyut Jantung[4]
Selain itu digunakan pula elektrokardiogram
atau biasa disingkat dengan EKG adalah rekaman aktivitas elektrik jantung sebagai grafik jejak garis pada kertas grafik. Namun pada penggunaan EKG ini kita harus mengetahui tentang sistem konduksi (listrik jantung). Denyut jantung adalah jumlah denyutan jantung per satuan waktu, biasanya per menit. Denyut jantung didasarkan pada jumlah kontraksi ventrikel (bilik bawah jantung). Denyut jantung mungkin terlalu cepat (takikardia) atau terlalu lambat (bradikardia).
Aorta adalah arteri terbesar dalam badan manusia. Bersumber dari bilik kiri jantung dan membawa darah beroksigen kepada semua bagian tubuh dalam peredaran sistemik. Bagian awal aorta, aorta menaik, muncul keluar dari ventrikel kiri, yang diasingkan oleh katup aorta. Kedua arteri coronaria jantung bercabang dari pangkal aorta, di atas katup aorta. Aorta kemudian melengkung balik mengelilingi arteri pulmonalis. Tiga pembuluh darah muncul keluar dari arcus aortae ini, yaitu arteri brachiocephalica, arteri carotis communis sinistra, dan arteri subclavia sinistra. Pembuluh-pembuluh ini memasok darah ke kepala dan bagian lengan. Aorta kemudian menuruni badan. Bagian atas diafragma (dalam dada) disebut aorta pars thoracalis dan bagian bawah diafragma (dalam abdomen) disebut aorta pars abdominalis.
Saat bergerak ke bawah dinding posterior abdomen, aorta abdomen beredar pada kiri vena cava inferior, bercabang-cabang menjadi saluran darah utama pada perut dan usus, dan juga ginjal. Terdapat banyak bentuk cabang yang dapat diketahui dalam vaskulatur sistem pencernaan. Bentuk yang paling umum ialah cabang aorta membentuk truncus celiacus, arteri mesenterica superior, dan juga arteri mesenterica inferior. Arteri renalis biasanya bercabang dari aorta abdominalis di antara truncus celiacus dan arteri mesenterica superior. Aorta berakhir dengan percabangan 2, yaitu arteri iliaca communis sinistra dan arteri iliaca communis dextra untuk memasok darah ke anggota tubuh bagian bawah dan pelvis.
II. KAJIAN LITERATUR
2.1 Sensor Pulse sensor adalah sensor detakan jantung
yang dirancang untuk Arduino dengan sistem Plug and play pada referensi [n]. Sensor ini dapat digunakan diberbagai bidang diantaranya pengembang teknologi sistem denyut jantung kedalam sebuah proyek berbasis teknologi bidang kesehatan. Pulse sensor nantinya akan dipasang di ujung jari atau di telinga. Pulse

Prosiding Seminar Nasional Teknik Elektro & Informatika TE45 SNTEI 2015
PNUP, Makassar, 11 Juni 2015
ISBN: 978-602-18168-0-6 203
sensor akan mengirimkan data analog ke Arduino untuk memantau secara real-time detakan-detakan yang terjadi di ujung sensornya.[5]
Gambar 2. Sensor Pulsh
Gambar 3. Respon Sensor Deteksi Jantung
Gambar 4. Reaksi Pulsh Sensor
Gambar 5. Reaksi Pulsh sensor (panjang gelombang)
a. Ardiuno.
Arduino merupakan platform open source baik secara hardwer dan software. Arduino terdiri dari mikrokontroler seperti ATmega8, ATmega168, ATmega328, ATmega1280, dan
ATmega2560 dengan menggunakan Kristal osilator 16 MHz, namun ada beberapa tipe Arduino yang menggunakan Kristal osilator 8 MHz. catu daya yang dibutuhkan untuk mengoprasikan minimum system Arduino cukup dengan tegangan 5 Vdc. Port arduino ATmega series terdiri dari 20 pin yang meliputi 14 pin I/O digital dengan 6 pin dapat berfungsi sebagai output PWM (Pulse Width Modulation) dan 6 pin I/O analog. Kelebihan dari Arduino adalah tidak membutuhkan flash programmer external karena di dalam chip mikrokontroler Arduino telah diisi dengan bootloader yang membuat proses upload menjadi lebih sederhana. Arduino Uno adalah papan mikrokontroler berbasis ATmega328. memiliki 14 digital input / output pin (dimana 6 pin dapat digunakan sebagai output PWM), 6 input analog, 16 MHz osilator kristal, koneksi USB, jack listrik tombol reset. Pin-pin ini berisi semua yang diperlukan untuk mendukung mikrokontroler, hanya terhubung ke komputer dengan kabel USB. [1],[2],[3]
Gambar 6 Board Arduino Uno
Tabel 2. Konversi sinyal analog oleh ADC
fitur ADC pada Board Arduino (Analog-to-Digital Converter) sebagai input analog dan pin digital PWM (Pulse-Width Modulation)

Prosiding Seminar Nasional Teknik Elektro & Informatika TE45 SNTEI 2015
PNUP, Makassar, 11 Juni 2015
ISBN: 978-602-18168-0-6 204
sebagai output analog. Grafik konversi sinyal analog oleh ADC dan sinyal analog yang dihasilkan dengan metode PWM terdapat pada Tabel 2
Gambar 7. Sinyal analog yang dihasil dengan metode
PWM III. METODE PENELITIAN
Perancangan Deteksi Jantung Perancangan perangkat pada sistem
monitoring detak jantung ini meliputi perancangan perangkat keras dan perangkat protokol komunikasi. Pada Gambar 8 adalah diagram alir penelitian, dimana perancangan rangkaian meliputi penentuan sensor detak jantung, perhitungan jumlah titik pengukuran, pembuatan skema monitoring, dan perancangan perangkat yang akan digunakan.
Gambar 8. Diagram alir penelitian
Gambar 9. Diagram blok rangkaian elektronik
Pada gambar 9, saat sistem diaktifkan,
sensor akan mendeteksi jaringan atau organ
yang bergerak seperti jantung. Sensor akan mendeteksi sinyal tersebut dan kembali mengirimkannya ke mikrokontroler dalam bentuk data untuk diolah. Data yang dikirimkan berupa data analog yang kemudian diolah oleh ADC untuk diubah menjadi data digital. Sistem mikrokontroler akan menghitung jumlah data yang masuk dari sensor tersebut yang berupa data digital dalam jangka waktu yang telah ditentukan. Saat mikrokontroler mendeteksi adanya detak jantung, secara bersamaan LED akan berkedip sebagai indicator. Hasil akhir dari perhitungan jumlah detak jantung manusia tersebut akan ditampilkan ke LCD yang menunjukkan banyaknya detak jantung per menit.
Gambar 10. Skematik Lengkap Rangkaian
Perancangan Software Perancangan lunak dilakukan dengan
membuat diagram alir terlebih dahulu dari perangkat lunak yang akan direalisasikan. Berikut adalah diagram alir (flowchart) dari program yang akan dibuat.
Gambar 11. Proses perancangan software

Prosiding Seminar Nasional Teknik Elektro & Informatika TE45 SNTEI 2015
PNUP, Makassar, 11 Juni 2015
ISBN: 978-602-18168-0-6 205
Gambar 12. Flowchart
Pada Gambar 12 flowchart di atas
dijelaskan bahwa saat sistem diaktifkan, mikrokontroler akan melakukan inisialisasi port dan variable yang digunakan, yaitu port A sebagai port input dan port B sebagai output. Lalu variabel yang digunakan adalah variabel D sebagai jumlah pulsa atau detak, dan variabel T sebagai variabel pengambilan data pulsa sampling (Timer). Pada kondisi normal, kedua variabel ini bernilai 0. Alur kerja dari sistem ini akan bekerja saat tombol start diaktifkan. Pada saat tombol start diaktifkan maka sensor mulai bekerja (menghitung jumlah pulsa). Jika terdeteksi adanya pulsa, maka sistem secara otomatis mengaktifkan timer. Pada program ini kita mengaktifkan timer selama 30 detik. Pulsa yang diaktifkan selama 30 detik ini akan dikalikan 2 dan jumlah perhitungan pulsa yang dihasilkan akan ditampilkan di LCD.
IV. HASIL DAN PEMBAHASAN Pengujian ini dilakukan untuk menjalankan
sistem secara keseluruhan. Pengujian ini dilakukan dengan menjalankan program perintah pada mikrokontroller ardiuno, dengan program pengambilan sampling time selama 30 detik, dan pengujian ini dilakukan dengan mengambil 5 sample data dari 5 orang berbeda dan mempunyai umur antara 20 - 25 tahun. Data yang didapat dari pengukuran menggunakan sistem secara keseluruhan dapat dibandingkan dengan perhitungan manual sehingga dapat dihitung persentase error.
Tabel 3 Sampel detak jantung melalui jari tangan
Perhitungan persentase error menggunakan rumus berikut :
𝐸𝐸𝑐𝑐𝑐𝑐𝑡𝑡𝑐𝑐 = 𝑆𝑆𝑏𝑏𝑐𝑐𝑐𝑐𝑏𝑏𝑐𝑐ℎ 𝑃𝑃𝑏𝑏𝑐𝑐ℎ𝑐𝑐𝑐𝑐𝑆𝑆𝑛𝑛𝑖𝑖𝑐𝑐𝑛𝑛
𝐽𝐽𝑆𝑆𝑆𝑆𝑐𝑐𝑐𝑐ℎ 𝑃𝑃𝑏𝑏𝑐𝑐ℎ𝑐𝑐𝑐𝑐𝑆𝑆𝑛𝑛𝑖𝑖𝑐𝑐𝑛𝑛 𝑀𝑀𝑐𝑐𝑛𝑛𝑆𝑆𝑐𝑐𝑐𝑐 𝑥𝑥 100%
Pada Tabel 3 dari beberapa titik pengukuran detak jantung, terdapat persentase error yang berbeda pada titik-titik pengukuran, dimana pada jempol terdapat error sebesar 10%, pada jari telunjuk terdapat error sebesar 0.47%, lalu pada jari tengah terdapat error sebesar 6.20%, kemudian pada jari manis terdapat error sebesar 1.42% dan pada jari kelingking terdapat error sebesar 11.42%. Sehingga dapat disimpulkan bahwa titik pengukuran yang baik untuk tahap pengujian selanjutnya untuk alat pendeteksi jumlah detak jantung ini adalah pada jari telunjuk.
Tabel 4. Data Percobaan Sampling selama 30 detik

Prosiding Seminar Nasional Teknik Elektro & Informatika TE45 SNTEI 2015
PNUP, Makassar, 11 Juni 2015
ISBN: 978-602-18168-0-6 206
Gambar 13. Sampel 1
Gambar 14. Sampel 2
Gambar 15. Sampel 3
Gambar 16. Sampel 4
Gambar 17. Sampel 5
Pada Gambar sampel 1, 2, 3, 4, 5 monitoring detak jantung secara riel time dari data hasil pengujian, menunjukan bahwa detak jantung normal pada orang dewasa berkisar 60 – 100 detak per menit, namun, detak jantung seseorang pun akan sangat bervariasi tergantung dari kondisi selama pengukuran seperti dalam keadaan tenang atau dalam keadaan banyak gerak. Dari data pengukuran dengan menggunakan sampling time selama 30 detik, persentase error sistem ini sekitar 0.97%. Hal ini terjadi karena frekuensi jantung
seseorang itu sangat bervariasi sesuai dengan pernapasan, proses ini dipercepat selama inspirasi dan diperlambat selama ekspirasi.
V. KESIMPULAN Rangkaian pendeteksi detak jantung ini
menghitung jumlah pulsa atau detak selama 30 detik dengan jumlah hasil perhitungan detak selama 30 detik dikalikan dengan 2 sehingga mendapatkan hasil perhitungan detak selama 1 menit. Rancang bangun alat pendeteksi detak jantung menggunakan pulse sensor sebagai penghasil data input dalam melakukan perhitungan detak jantung per menit (Heart Beat Per Minute).
UCAPAN TERIMA KASIH Puji syukur penulis ucapkan kehadirat
Tuhan Yang Maha Esa atas rahmat dan hidayahNya sehingga dapat menyelesaikan paper ini. Dalam penyelesaian paper ini banyak mendapatkan bantuan dari berbagai pihak. Untuk ini penulis mengucapkan terima kasih sebesar-besarnya kepada, Direktur Politeknik Negeri Ujung Pandang, Ketua Jurusan Teknik Elektro dan Ketua Program Studi Teknik Elektronika, serta rekan sejawat Dosen beserta staf akademik.
REFERENSI Penulisan naskah dan sitasi yang diacu
[1] Yuwono Marta Dinata, “Ardiuno Itu Mudah” PT. Elex Media Komputindo, 2015.
[2] Abdul Kadir, “Ardiuno (Panduan Praktis dan Pemogramannya”, Andi Yogyakarta, 2013.
[3] Dian antarto, “Interaksi Ardiuno dan LabView”, PT. Elex Media Komputindo, 2012.
[4] Muhjaenuri dan Mu’min Musman “Rancang Bangun Alat Pendeteksi Frekuensi Denyut Jantung Manusia Berbasis Mikrokontroler”, Project Akhir D3 Teknik Elektro PNUP, 2014
[5] http://pulssensor.myshopify.com/products/pulse-sensor-amped

Prosiding Seminar Nasional Teknik Elektro & Informatika TE34 SNTEI 2015
PNUP, Makassar, 11 Juni 2015
ISBN: 978-602-18168-0-6 207
Sistem Keamanan Ruangan Menggunakan Sensor Gerak Berbasis Mikrokontroller AT89S51
Desmira1 , Didik Aribowo2
1 Fakultas Teknik, Universitas Serang Raya email: [email protected]
2 Fakultas Teknik, Universitas Sultan Ageng Tirtayasa email: [email protected]
Abstrak
Keamanan adalah salah satu hal sangat penting. Banyak hal kita lakukan untuk menciptakan keamanan. Salah satunya adalah keamanan ruangan. Kita selalu merasa resah saat meninggalkan ruangan dalam keadaan kosong. Hal ini adalah wajar karena ruangan merupakan tempat untuk menyimpan barang–barang berharga dan mungkin sangat pribadi bagi kita. Maksud dilakukan penelitian ini yaitu, memanfaatkan mikrokontroler sebagai alat pengaman ruangan dengan menggunakan sensor gerak, memanfaatkan sensor gerak yang dihubungkan dengan alat agar dapat mendeteksi ada tidak orang yang keluar masuk ruangan tanpa izin, dan membuat alat sederhana yang dapat memberi rasa aman. Alat yang dapat menjadi suatu alternatif pengaman baru yang berupa kunci elektronis menggunakan password dengan kode yang ditetapkan merupakan salah satu solusi yang tepat, karena pemanfaatan password sebagai kunci memberikan berbagai kemudahan dengan bentuk dan pengguanaannya yang praktis. Kunci elektronis menggunakan password ini bekerja dengan menggunakan sensor infra red sebagai pendeteksi adanya pergerakan pada pintu, dan mikrokontroler AT89S51 sebagai pengendali dari sistem, serta beberapa komponen elektronika pendukung lainnya. Pada perancangan disini yang dimaksudkan meliputi perancangan perangkat keras (hardware) dan perangkat lunak (software). Perangkat keras yang dibuat meliputi rangkaian – rangkaian, sedangkan perancangan perangkat lunak dilakukan dengan program assembler ASM51. Kata Kunci : Sistem Keamanan, Keamanan Ruangan, Sensor Gerak, Mikrokontroller, AT89S51 I. PENDAHULUAN A. Latar Belakang Masalah
Keamanan adalah salah satu hal sangat penting. Banyak hal kita lakukan untuk menciptakan keamanan. Salah satunya adalah keamanan ruangan. Kita selalu merasa resah saat meninggalkan ruangan dalam keadaan kosong. Hal ini adalah wajar karena ruangan merupakan tempat untuk menyimpan barang–barang berharga dan mungkin sangat pribadi bagi kita.
Perasaan resah disebabkan adanya kemungkinan terjadinya pencurian terhadap barang berharga. Bila ruangan dalam keadaan kosong, maka kita tidak dapat mengawasi ruangan secara tepat. Tapi kalau kita dapat lebih cepat mengetahui kejadian yang terjadi pada ruangan tersebut, pasti keadaannya akan berbeda. Misalnya bila kita mengetahui adanya usaha pencurian terhadap ruangan yang kita
tinggalkan, kita dapat dengan segera menelepon polisi hal itu dapat kita lakukan apabila kita mengetahui kejadian tersebut lebih dini.
Untuk itu diperlukan sebuah alat yang dapat mengetahui jika ada orang yang masuk ke ruangan tersebut tanpa izin. Kemudian alat ini dapat memberitahukan kepada pemilik tentang kejadian yang terjadi diruangan tersebut. Dengan demikian pemilik dapat mengetahui lebih awal tentang kejadian tersebut, dan kemudian dapat mengambil tindakan lebih cepat untuk mengatasinya.
B. Maksud dan Tujuan
Maksud dilakukan penelitian ini adalah sebagai berikut : 1. Memanfaatkan mikrokontroler sebagai
alat pengaman ruangan dengan menggunakan sensor gerak,
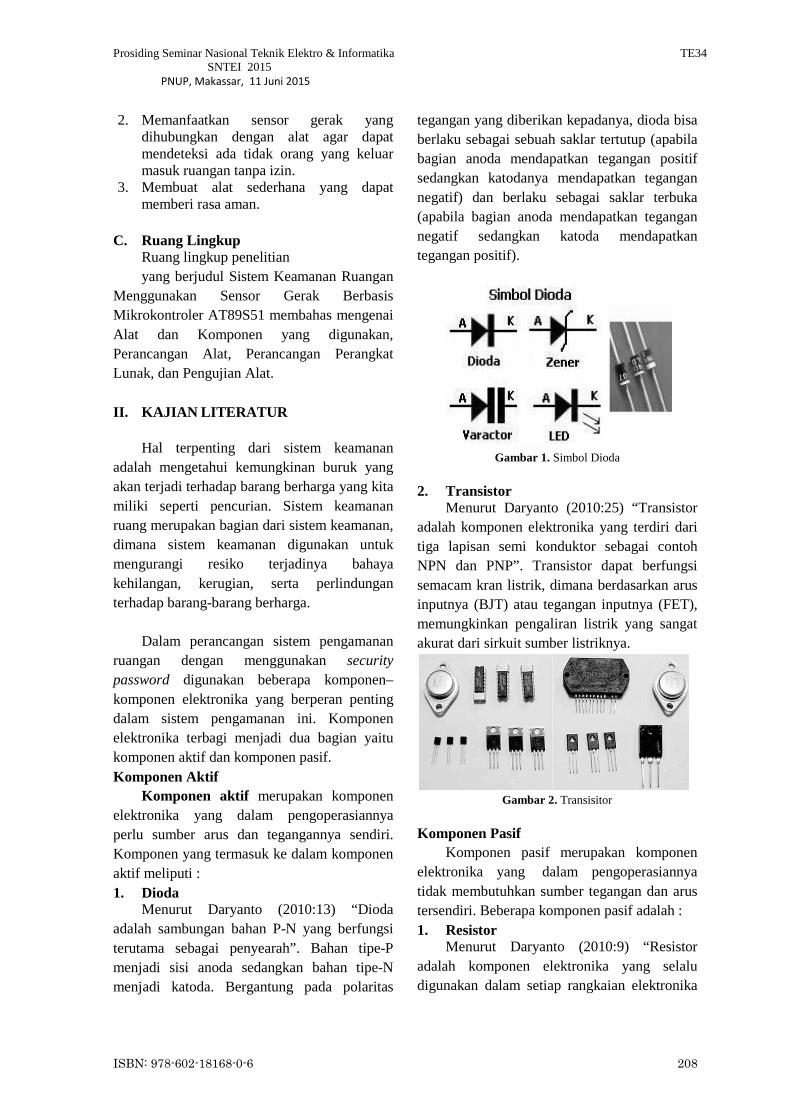
Prosiding Seminar Nasional Teknik Elektro & Informatika TE34 SNTEI 2015
PNUP, Makassar, 11 Juni 2015
ISBN: 978-602-18168-0-6 208
2. Memanfaatkan sensor gerak yang dihubungkan dengan alat agar dapat mendeteksi ada tidak orang yang keluar masuk ruangan tanpa izin.
3. Membuat alat sederhana yang dapat memberi rasa aman.
C. Ruang Lingkup
Ruang lingkup penelitian yang berjudul Sistem Keamanan Ruangan
Menggunakan Sensor Gerak Berbasis Mikrokontroler AT89S51 membahas mengenai Alat dan Komponen yang digunakan, Perancangan Alat, Perancangan Perangkat Lunak, dan Pengujian Alat. II. KAJIAN LITERATUR
Hal terpenting dari sistem keamanan adalah mengetahui kemungkinan buruk yang akan terjadi terhadap barang berharga yang kita miliki seperti pencurian. Sistem keamanan ruang merupakan bagian dari sistem keamanan, dimana sistem keamanan digunakan untuk mengurangi resiko terjadinya bahaya kehilangan, kerugian, serta perlindungan terhadap barang-barang berharga.
Dalam perancangan sistem pengamanan ruangan dengan menggunakan security password digunakan beberapa komponen–komponen elektronika yang berperan penting dalam sistem pengamanan ini. Komponen elektronika terbagi menjadi dua bagian yaitu komponen aktif dan komponen pasif. Komponen Aktif
Komponen aktif merupakan komponen elektronika yang dalam pengoperasiannya perlu sumber arus dan tegangannya sendiri. Komponen yang termasuk ke dalam komponen aktif meliputi : 1. Dioda
Menurut Daryanto (2010:13) “Dioda adalah sambungan bahan P-N yang berfungsi terutama sebagai penyearah”. Bahan tipe-P menjadi sisi anoda sedangkan bahan tipe-N menjadi katoda. Bergantung pada polaritas
tegangan yang diberikan kepadanya, dioda bisa berlaku sebagai sebuah saklar tertutup (apabila bagian anoda mendapatkan tegangan positif sedangkan katodanya mendapatkan tegangan negatif) dan berlaku sebagai saklar terbuka (apabila bagian anoda mendapatkan tegangan negatif sedangkan katoda mendapatkan tegangan positif).
Gambar 1. Simbol Dioda
2. Transistor
Menurut Daryanto (2010:25) “Transistor adalah komponen elektronika yang terdiri dari tiga lapisan semi konduktor sebagai contoh NPN dan PNP”. Transistor dapat berfungsi semacam kran listrik, dimana berdasarkan arus inputnya (BJT) atau tegangan inputnya (FET), memungkinkan pengaliran listrik yang sangat akurat dari sirkuit sumber listriknya.
Gambar 2. Transisitor
Komponen Pasif
Komponen pasif merupakan komponen elektronika yang dalam pengoperasiannya tidak membutuhkan sumber tegangan dan arus tersendiri. Beberapa komponen pasif adalah : 1. Resistor
Menurut Daryanto (2010:9) “Resistor adalah komponen elektronika yang selalu digunakan dalam setiap rangkaian elektronika
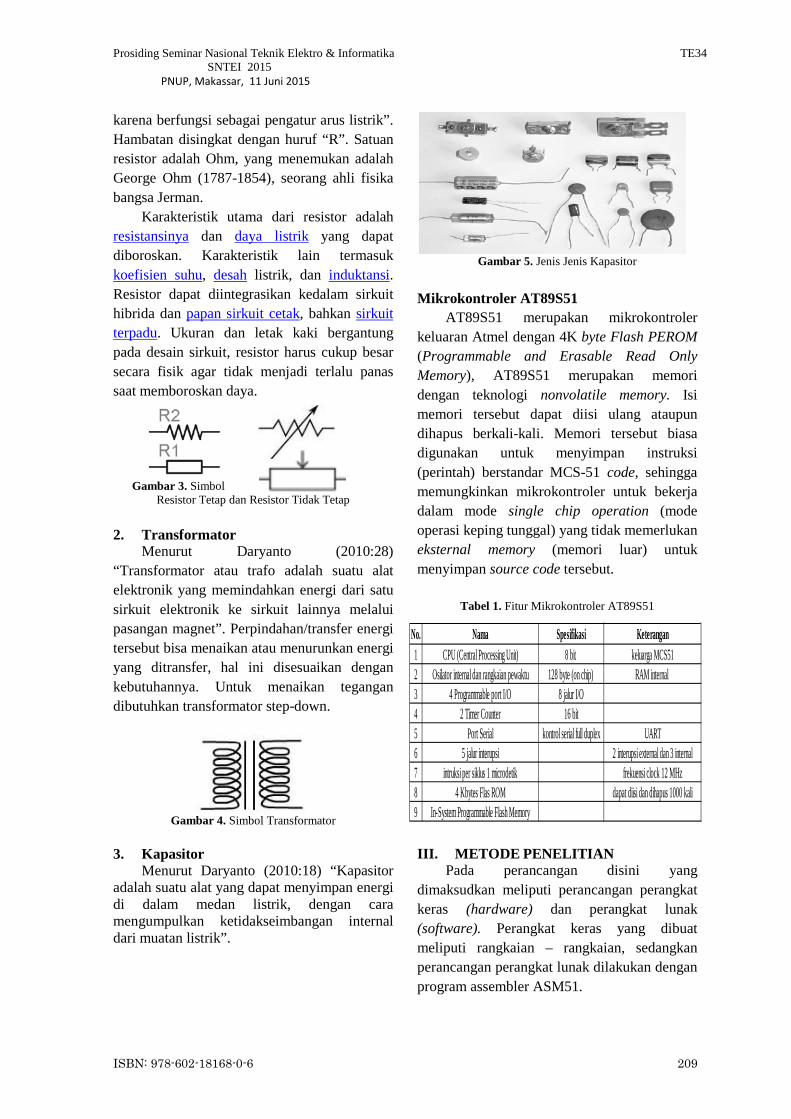
Prosiding Seminar Nasional Teknik Elektro & Informatika TE34 SNTEI 2015
PNUP, Makassar, 11 Juni 2015
ISBN: 978-602-18168-0-6 209
No. Nama Spesifikasi Keterangan1 CPU (Central Processing Unit) 8 bit keluarga MCS512 Osilator internal dan rangkaian pewaktu 128 byte (on chip) RAM internal 3 4 Programmable port I/O 8 jalur I/O4 2 Timer Counter 16 bit5 Port Serial kontrol serial full duplex UART6 5 jalur interupsi 2 interupsi external dan 3 internal7 intruksi per siklus 1 microdetik frekuensi clock 12 MHz8 4 Kbytes Flas ROM dapat diisi dan dihapus 1000 kali9 In-System Programmable Flash Memory
karena berfungsi sebagai pengatur arus listrik”. Hambatan disingkat dengan huruf “R”. Satuan resistor adalah Ohm, yang menemukan adalah George Ohm (1787-1854), seorang ahli fisika bangsa Jerman.
Karakteristik utama dari resistor adalah resistansinya dan daya listrik yang dapat diboroskan. Karakteristik lain termasuk koefisien suhu, desah listrik, dan induktansi. Resistor dapat diintegrasikan kedalam sirkuit hibrida dan papan sirkuit cetak, bahkan sirkuit terpadu. Ukuran dan letak kaki bergantung pada desain sirkuit, resistor harus cukup besar secara fisik agar tidak menjadi terlalu panas saat memboroskan daya.
Gambar 3. Simbol Resistor Tetap dan Resistor Tidak Tetap
2. Transformator
Menurut Daryanto (2010:28) “Transformator atau trafo adalah suatu alat elektronik yang memindahkan energi dari satu sirkuit elektronik ke sirkuit lainnya melalui pasangan magnet”. Perpindahan/transfer energi tersebut bisa menaikan atau menurunkan energi yang ditransfer, hal ini disesuaikan dengan kebutuhannya. Untuk menaikan tegangan dibutuhkan transformator step-down.
Gambar 4. Simbol Transformator
3. Kapasitor
Menurut Daryanto (2010:18) “Kapasitor adalah suatu alat yang dapat menyimpan energi di dalam medan listrik, dengan cara mengumpulkan ketidakseimbangan internal dari muatan listrik”.
Gambar 5. Jenis Jenis Kapasitor
Mikrokontroler AT89S51
AT89S51 merupakan mikrokontroler keluaran Atmel dengan 4K byte Flash PEROM (Programmable and Erasable Read Only Memory), AT89S51 merupakan memori dengan teknologi nonvolatile memory. Isi memori tersebut dapat diisi ulang ataupun dihapus berkali-kali. Memori tersebut biasa digunakan untuk menyimpan instruksi (perintah) berstandar MCS-51 code, sehingga memungkinkan mikrokontroler untuk bekerja dalam mode single chip operation (mode operasi keping tunggal) yang tidak memerlukan eksternal memory (memori luar) untuk menyimpan source code tersebut.
Tabel 1. Fitur Mikrokontroler AT89S51 III. METODE PENELITIAN
Pada perancangan disini yang dimaksudkan meliputi perancangan perangkat keras (hardware) dan perangkat lunak (software). Perangkat keras yang dibuat meliputi rangkaian – rangkaian, sedangkan perancangan perangkat lunak dilakukan dengan program assembler ASM51.

Prosiding Seminar Nasional Teknik Elektro & Informatika TE34 SNTEI 2015
PNUP, Makassar, 11 Juni 2015
ISBN: 978-602-18168-0-6 210
Atmel89S51
SensorInfra Red
IC54543AL
Swith
TampilanLCD 2x16
MotorDC
Catu DayaIC 7805
BUZER
Keypad
Gambar 6. Diagram Blok Rangkaian IV. HASIL DAN PEMBAHASAN Cara Kerja Alat
Pertama menyambungkan dengan arus 220V ke trafo,untuk mengubah arus tersebut menjadi 5V dan 12 V maka digunakan IC 7805 dan IC 7812. Pada saat arus telah melewati IC maka arus itu menjadi 5V dan 12V, kemudian menjalankan objek untuk melintasi sensor inframerah.
Rangkaian dikatakan berfungsi apabila lampu indikator menyala dan ketika password dimasukkan benar, pintu akan terbuka, demikian sebaliknya jika password salah maka buzzer akan bunyi. Karena sensor ini berfungsi untuk mendeteksi seseorang yang lewat maka diletakkan di dalam ruangan. Perangkat Lunak
Perangkat lunak atau program yang diketik dalam format editor Notepad. File Notepad disimpan dalam extension asm. File tersebut di compaile dengan menggunakan program assembler ASM51. Hasil dari compaile merupakan data hexa dan listing program.
Hasil dari compaile program akan secara langsung menunjukkan kesalahan memonik dan program yang dirancang oleh pengguna melalui hasil listing program. Untuk mengetahui program berjalan dengan benar atau tidak dapat dipantau dengan program emulator 8051. Dalam emulator ini dapat dilihat jalannya pengisian register dan accumulator serta timer dan fungsi lainnya
GAMBAR 7. Tampilan Program Emulator 8051
Cara mengisi pertama load HEX file ke
flash buffer yaitu menempatkan posisi kursor pada posisi A dengan mengetik file yang akan disimpan, misal nama file ab maka penulisannya ab.HEX dan enter maka akan terlihat posisi pemakaian memori IC yaitu pada gambar II.39. Kemudian kursor dipindah ke posisi (E) atau program lalu dienter, maka program sudah dimasukkan ke IC mikrokontroler. Sistem Kerja Program
Program diawali dengan start yang berarti alat dihidupkan, kemudian program akan menunggu penekanan pada tombol password, setelah tombol password benar ditekan maka alarm akan dimatikan pintu di buka dan memakai sensor dan jika tombol password tudak benar (salah) maka alarm hidup (bunyi). Jika ya maka tombol reset ditekan dan

Prosiding Seminar Nasional Teknik Elektro & Informatika TE34 SNTEI 2015
PNUP, Makassar, 11 Juni 2015
ISBN: 978-602-18168-0-6 211
mematikan alarm yang sedang bunyi. Kemudian pintu akan menutup kembali seperti awal dan semua sensor akan aktif kembali dan program kembali ke awal demikian seterusnya
Gambar 8. Program Pengisi IC Mikrokontroler
AT89S51 (load HEX file)
Gambar 9. Program Pengisi IC Mikrokontroler
AT89S51 (alamat memori program)
Gambar 10. Program Pengisi IC Mikrokontroler
AT89S51 (mengisi program)
Urutan kerja program adalah sebagai berikut : 1. Setelah sistem dihidupkan,segera
melakukan inisialisasi sistem,yaitu melakukan setting daftar awal, port masukan, port keluaran, saluran perintah dan pengisian perintah-perintah internal dalam mikrokontroler AT89S51.Setelah inisialisasi maka sistem telah mulai bekerja.
2. Dari tombol keypad kita dapat menentukan pilihan operasi sistem.
3. Jika yang dipilih operasi pada tempat tidur maka tentukan lagi posisinya posisi kepala atau kaki, naik/turun, apabila posisi kepala maka tekan tombol posisi kepala lalu tekan tombol start kepala dan set ketinggian pada keypad. Motor pada tempat tidur posisi kepala akan bergerak dan setelah mengenai sensor, motor akan berhenti sesuai settingan dan tampilan dapat dlihat pada sevensegment, begitupula sistem kerja motor pada posisi kaki
4. Jika yang dipilih operasi pada tempat makanan maka kita dapat menentukan posisi maju/mundur, motor akan bergerak dan setelah menyentuh limit switch motor tempat makanan akan berhenti.
5. Program dimulai dari awal lagi. Pengujian Rangkaian 1. Keypad
Pengujian rangkaian ini dapat dilakukan dengan menghubungkan rangkaian ini dengan mikrokontroler AT89S51, kemudian memberikan program sederhana untuk mengetahui baik atau tidaknya rangkaian. Rangkaian dihubungkan ke port 2. untuk mengecek penekanan pada 3 tombol yang paling atas. Dengan demikian, maka pin P2.0 akan mendapat logika low (1), dan yang lainnya mendapat logika high (0). Tombol yang digunakan adalah tombol 3x3.
Tabel 2. Pengujian Keypad
P2.0 P2.1 P2.2 P2.3 P2.4 P2.5 1 1 1 1 1 0 1 1 1 1 0 1 1 1 1 0 1 1
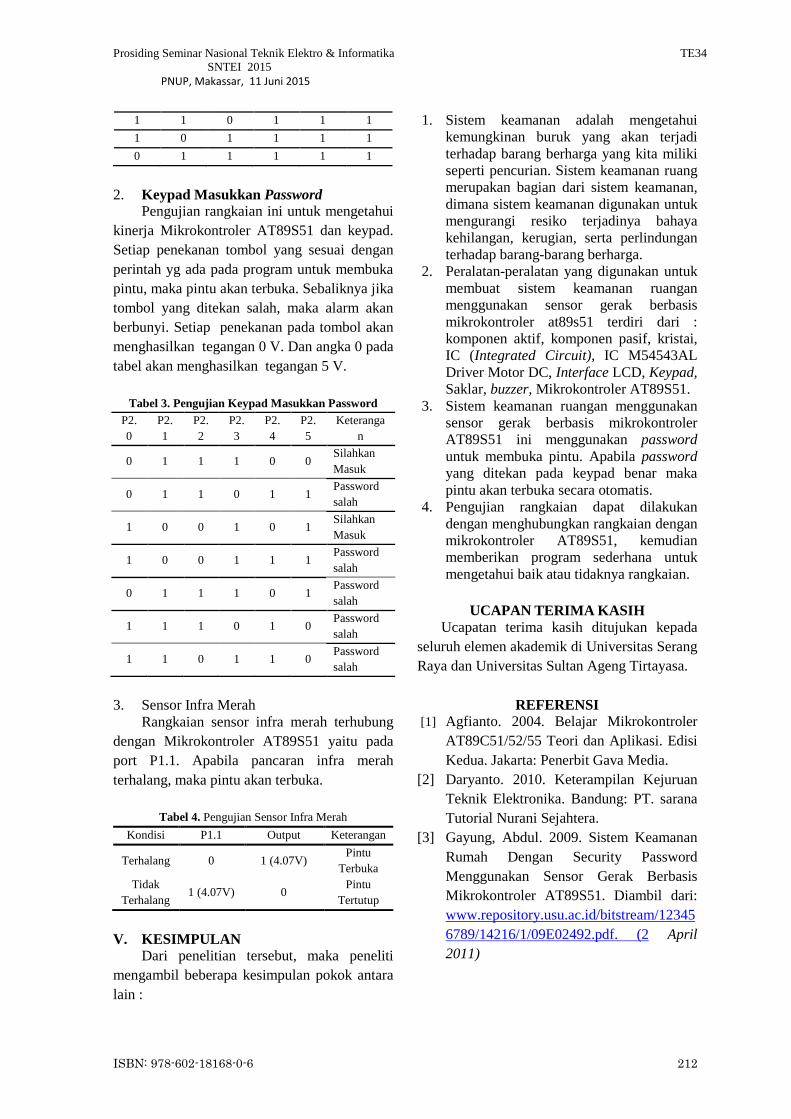
Prosiding Seminar Nasional Teknik Elektro & Informatika TE34 SNTEI 2015
PNUP, Makassar, 11 Juni 2015
ISBN: 978-602-18168-0-6 212
1 1 0 1 1 1 1 0 1 1 1 1 0 1 1 1 1 1
2. Keypad Masukkan Password
Pengujian rangkaian ini untuk mengetahui kinerja Mikrokontroler AT89S51 dan keypad. Setiap penekanan tombol yang sesuai dengan perintah yg ada pada program untuk membuka pintu, maka pintu akan terbuka. Sebaliknya jika tombol yang ditekan salah, maka alarm akan berbunyi. Setiap penekanan pada tombol akan menghasilkan tegangan 0 V. Dan angka 0 pada tabel akan menghasilkan tegangan 5 V.
Tabel 3. Pengujian Keypad Masukkan Password P2.0
P2.1
P2.2
P2.3
P2.4
P2.5
Keterangan
0 1 1 1 0 0 Silahkan Masuk
0 1 1 0 1 1 Password salah
1 0 0 1 0 1 Silahkan Masuk
1 0 0 1 1 1 Password salah
0 1 1 1 0 1 Password salah
1 1 1 0 1 0 Password salah
1 1 0 1 1 0 Password salah
3. Sensor Infra Merah
Rangkaian sensor infra merah terhubung dengan Mikrokontroler AT89S51 yaitu pada port P1.1. Apabila pancaran infra merah terhalang, maka pintu akan terbuka.
Tabel 4. Pengujian Sensor Infra Merah
Kondisi P1.1 Output Keterangan
Terhalang 0 1 (4.07V) Pintu
Terbuka Tidak
Terhalang 1 (4.07V) 0 Pintu
Tertutup
V. KESIMPULAN
Dari penelitian tersebut, maka peneliti mengambil beberapa kesimpulan pokok antara lain :
1. Sistem keamanan adalah mengetahui kemungkinan buruk yang akan terjadi terhadap barang berharga yang kita miliki seperti pencurian. Sistem keamanan ruang merupakan bagian dari sistem keamanan, dimana sistem keamanan digunakan untuk mengurangi resiko terjadinya bahaya kehilangan, kerugian, serta perlindungan terhadap barang-barang berharga.
2. Peralatan-peralatan yang digunakan untuk membuat sistem keamanan ruangan menggunakan sensor gerak berbasis mikrokontroler at89s51 terdiri dari : komponen aktif, komponen pasif, kristai, IC (Integrated Circuit), IC M54543AL Driver Motor DC, Interface LCD, Keypad, Saklar, buzzer, Mikrokontroler AT89S51.
3. Sistem keamanan ruangan menggunakan sensor gerak berbasis mikrokontroler AT89S51 ini menggunakan password untuk membuka pintu. Apabila password yang ditekan pada keypad benar maka pintu akan terbuka secara otomatis.
4. Pengujian rangkaian dapat dilakukan dengan menghubungkan rangkaian dengan mikrokontroler AT89S51, kemudian memberikan program sederhana untuk mengetahui baik atau tidaknya rangkaian.
UCAPAN TERIMA KASIH
Ucapatan terima kasih ditujukan kepada seluruh elemen akademik di Universitas Serang Raya dan Universitas Sultan Ageng Tirtayasa.
REFERENSI [1] Agfianto. 2004. Belajar Mikrokontroler
AT89C51/52/55 Teori dan Aplikasi. Edisi Kedua. Jakarta: Penerbit Gava Media.
[2] Daryanto. 2010. Keterampilan Kejuruan Teknik Elektronika. Bandung: PT. sarana Tutorial Nurani Sejahtera.
[3] Gayung, Abdul. 2009. Sistem Keamanan Rumah Dengan Security Password Menggunakan Sensor Gerak Berbasis Mikrokontroler AT89S51. Diambil dari: www.repository.usu.ac.id/bitstream/123456789/14216/1/09E02492.pdf. (2 April 2011)

Prosiding Seminar Nasional Teknik Elektro & Informatika TE34 SNTEI 2015
PNUP, Makassar, 11 Juni 2015
ISBN: 978-602-18168-0-6 213
[4] Prihono, DKK.2009. Jago Elektronika Secara Otodidak. Ciganjur: Penerbit Kawan Pustaka.
[5] Sudjadi. 2005. Teori dan Aplikasi Mikrokontroler AT89C51. Yogyakarta: Penerbit Graha Ilmu.
[6] Usman. 2008. Teknik Antarmuka dan Pemprograman Mikrokontroler AT89S51. Yogyakarta: Penerbit Andi Yogyakarta.

Prosiding Seminar Nasional Teknik Elektro & Informatika TE34 SNTEI 2015
PNUP, Makassar, 11 Juni 2015
ISBN: 978-602-18168-0-6 214




















