Sistem Manusia Mesin
35
Sritomo W.Soebroto Lab Ergonomi & PSK Sistem Manusia - Mesin 1 Sistem Manusia-Mesin Sritomo W.Soebroto Laboratorium Ergonomi & Perancangan Sistem Kerja Jurusan Teknik Industri - Institut Teknologi Sepuluh Nopember
-
Upload
desryadi-ilyas-mohammad -
Category
Documents
-
view
147 -
download
1
Transcript of Sistem Manusia Mesin
Sritomo W.Soebroto Lab Ergonomi & PSK
Sistem Manusia - Mesin 1
Sistem Manusia-Mesin
Sritomo W.Soebroto
Laboratorium Ergonomi & Perancangan Sistem Kerja
Jurusan Teknik Industri - Institut Teknologi Sepuluh Nopember

Agenda
• Sistem Kerja (Work System)
• Simple & Complex Ergo System
• Elemen-Elemen Sistem Manusia-Mesin
• Manual, Mechanics/Semi-Automatics & Full- Automatics Man-Machine Systems.
• Aplikasi Sistem Manusia-Mesin dalam Industri
Sritomo W.Soebroto Lab Ergonomi & PSK
Sistem Manusia - Mesin 2
Work Systems ?
• Work – refer to any form of human effort or activity, including recreation and leisure to pursuits.
• System – refers to socio-technical systems. The systemsmay be as simple as a single individual using a hand tool oras complex as a multinational organization.
• Work System consists of two or more persons interactingwith some form of (1) job design, (2) hardware and/orsoftware, (3) internal environment, (4) externalenvironment, and (5) an organizational design (i.e. worksystem’s structure and processes).
Sritomo W.Soebroto Lab Ergonomi & PSK
Sistem Manusia - Mesin 3
Ergonomics Work Design?• Job design – includes work modules, tasks, knowledge and skill
requirements, and such factors as the degree of autonomy, identity,variety, meaningfulness, feedback, and opportunity for social interaction.
• Hardware (machines, tools, physical products); software (menu,programs, etc).
• Internal environment – various physical parameters, such as temperature,humidity, illumination, noise, air quality, and vibration. It also includespsychosocial factors.
• External environment – consists of those elements that permeate theorganization to which the organization must be responsive to besuccessful. Included are political, cultural, and economic factors (e.g.materials and parts resources, customers, available labor pool, andeducational resources). Of particular importance is the degree of stabilityor change of these external environmental factors and, taken together fora given work system, the degree of environmental complexity they presentto the organization.
• Organizational design of work system – consists of its organizationalstructure and the process by which the work system accomplishes itsfunctions.
Sritomo W.Soebroto Lab Ergonomi & PSK
Sistem Manusia - Mesin 4

Human-System Interface Technology
• Human Factors/Ergonomic (HF/E) – involves the study ofhuman performance capabilities, limitations, and othercharacteristics. These data then are used to develop Human-System Interface (HSI) Technology.
• Human-System Interface (HSI) Technology – the interfacebetween the people portion of systems and the other socio-technical system components (hardware, software, internaland external environments, and work system structures andprocesses).
• The overall goal is to improve the human condition, includinghealth, safety, comfort, productivity and quality of work life.
Sritomo W.Soebroto Lab Ergonomi & PSK
Sistem Manusia - Mesin 5

Ergo Systems
• Simple & complex ergo-system
• Ergonomics : deals with the interaction of the human operator and machine in the work environment
• Sistem Manusia-Mesin – merupakan sistem dengan siklus tertutup dimana manusia akan menjadi “key factor”, karena keputusan untuk mengambil sebuah tindakan (kerja) secara penuh berada ditangan manusia.
• Ergonomic interfaces man-machine system (a) perception dari semua informasi yang tampak di instrument display, dan (b) manually operating the controls
Sritomo W.Soebroto Lab Ergonomi & PSK
Sistem Manusia - Mesin 6

Sistem Manusia - Mesin
Sritomo W.Soebroto Lab Ergonomi & PSK
Sistem Manusia - Mesin 7
Human
Machine
Ergonomic(Interface Sistem Manusia-Mesin)

Sritomo W.Soebroto Lab Ergonomi & PSK
Sistem Manusia - Mesin 8
Human
Human-Machine
Human-Environment
Ergo-System
Sritomo W.Soebroto Lab Ergonomi & PSK
Sistem Manusia - Mesin 9
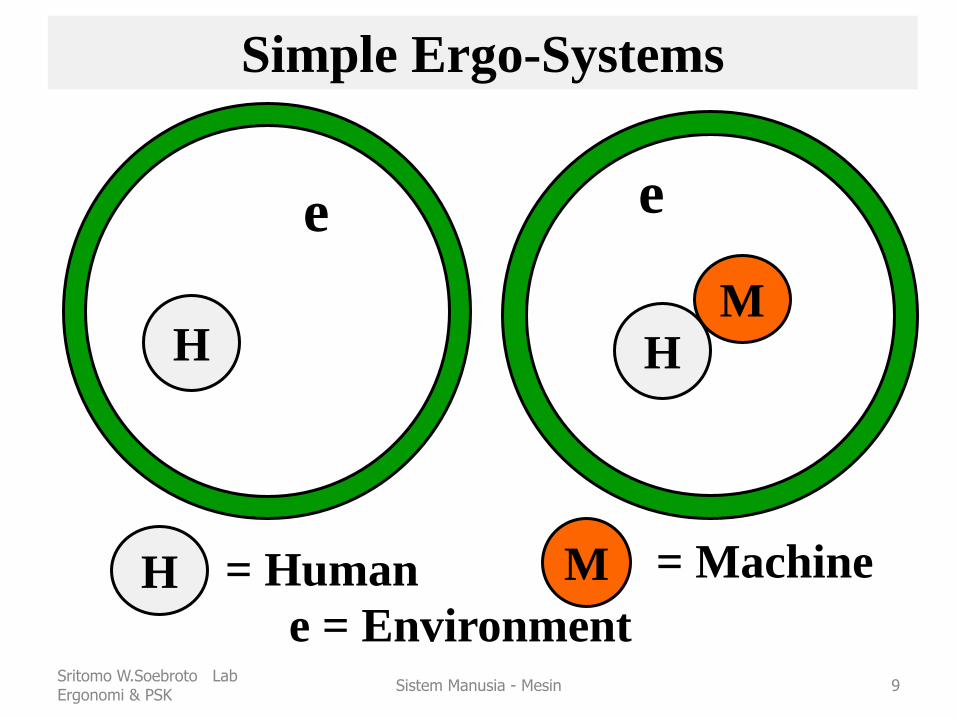
H HM
H M= Human = Machine
Simple Ergo-Systems
e e
e = Environment

Sritomo W.Soebroto Lab Ergonomi & PSK
Sistem Manusia - Mesin 10
H HMM
M
MM
H
HH
H = Human M = Machine
Complex Ergo-Systems
e e
e = Environment
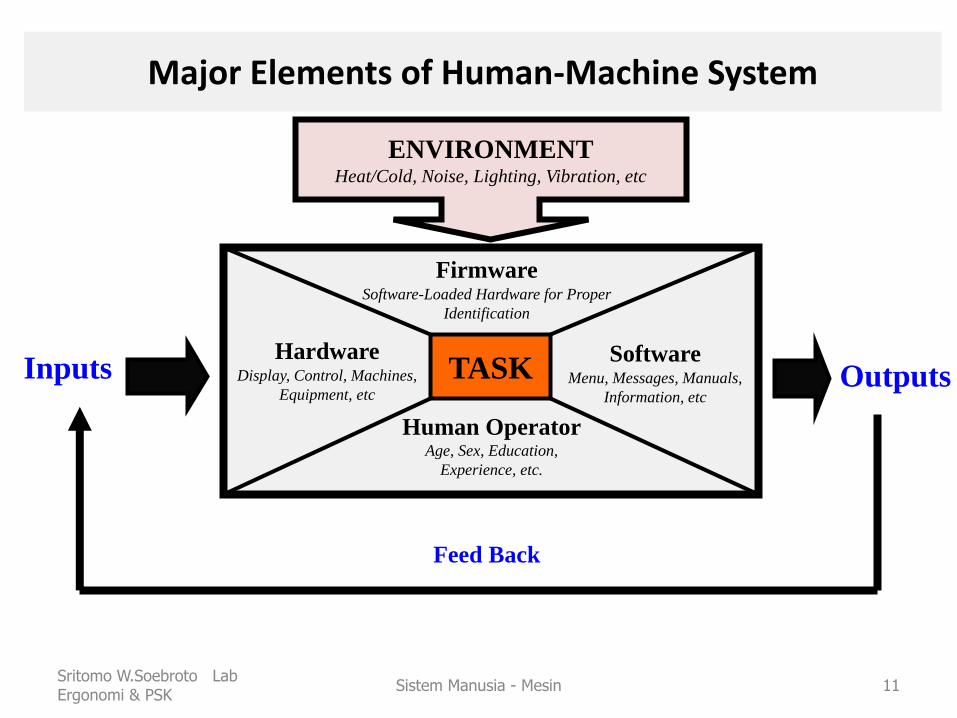
Major Elements of Human-Machine System
Sritomo W.Soebroto Lab Ergonomi & PSK
Sistem Manusia - Mesin 11
TASK
FirmwareSoftware-Loaded Hardware for Proper
Identification
HardwareDisplay, Control, Machines,
Equipment, etc
SoftwareMenu, Messages, Manuals,
Information, etc
Human OperatorAge, Sex, Education,
Experience, etc.
OutputsInputs
Feed Back
ENVIRONMENTHeat/Cold, Noise, Lighting, Vibration, etc

Sistem Manusia-Mesin(Man-Machine System)
Sritomo W.Soebroto Lab Ergonomi & PSK
Sistem Manusia - Mesin 12
InformationInput
OutputSensing(InformationReceiving)
InformationProcessing &
Decision
ActionFunctions
(Physical Controlor Communication)
InformationStorage

Sistem Manusia-Mesin
• Sensing (Information Receiving) – panca indera (manusia); electronic/photographic (mesin). Menerima informasi baik dari luar maupun dalam sistem sendiri.
• Information Storage – Manusia (memori sistem di otak manusia); mesin (disk, punch-card, tape, table data, dll)
• Information Processing
• Action Functions – Physical control/process (gerakan fisik); communication action (voice, signal, record, dll)
Sritomo W.Soebroto Lab Ergonomi & PSK
Sistem Manusia - Mesin 13

Visual Perception
• Senses of seeing & hearing (information input)
• Berkaitan dengan kemampuan organ penangkap informasi (input), sedangkan interpretasi data sangat tergantung pada pengalaman individual yang akan membentuk gambaran umum yang bisa ditangkap dan dimengerti
• Persepsi tidak memberikan “exact photocopy” dari apa yang bisa ditangkap dari input data (informasi) yang bisa ditangkap (our impressions are a subjective modification of what we have perceived)
Sritomo W.Soebroto Lab Ergonomi & PSK
Sistem Manusia - Mesin 14

Kesalahan Persepsi ?
Sritomo W.Soebroto Lab Ergonomi & PSK
Sistem Manusia - Mesin 15

Tipikal Sistem Manusia-Mesin
• Sistem Manual
* Input langsung ditransformasikan oleh manusia menjadi output kerja
* Kendali (kontrol) sepenuhnya dilakukan oleh manusia (begitu juga dengan power atau enersi kerja)
* Mesin atau fasilitas kerja sekedar menambah kemampuan (capability) manusia
* Contoh : Aktivitas kerja manual (mengikir, menulis, dan sebagainya)
• Sistem Mekanis (Semi-Automatic)
* Input diolah dalam sebuah mekanisme khusus (display) sebelum diterima oleh manusia
* Reaksi dari manusia kemudian diolah/dikontrol oleh mekanisme lain sebelum menghasilkan kerja mesin (power oleh mesin, dan kendali kerja oleh manusia
* Contoh : proses kerja dari sistem manusia-mobil
• Sistem Otomatis
* Rangsangan luar (input) dan pengendali aktivitas dilakukan oleh mesin
* Fungsi operator (manusia) sekedar sebagai pengamat (monitor) kerja mesin, entry data, ataupun mengganti program mesin.
Sritomo W.Soebroto Lab Ergonomi & PSK
Sistem Manusia - Mesin 16

Tipikal Sistem Manusia-Mesin(Manual Man-Machine System)
Sistem Manual
• Input langsung ditransformasikan oleh manusia menjadi output kerja• Kendali (kontrol) sepenuhnya dilakukan oleh manusia (begitu juga
dengan power atau enersi kerja)• Mesin atau fasilitas kerja sekedar menambah kemampuan (capability)
manusia• Contoh : Aktivitas kerja manual (mengikir, menulis,
memaku dan sebagainya)
Sritomo W.Soebroto Lab Ergonomi & PSK
Sistem Manusia - Mesin 17
Information
StorageSensing
Processing
ActionInputs Output
Feed Back
(Human)
Manual Man-Machine System
Sritomo W.Soebroto Lab Ergonomi & PSK
Sistem Manusia - Mesin 18
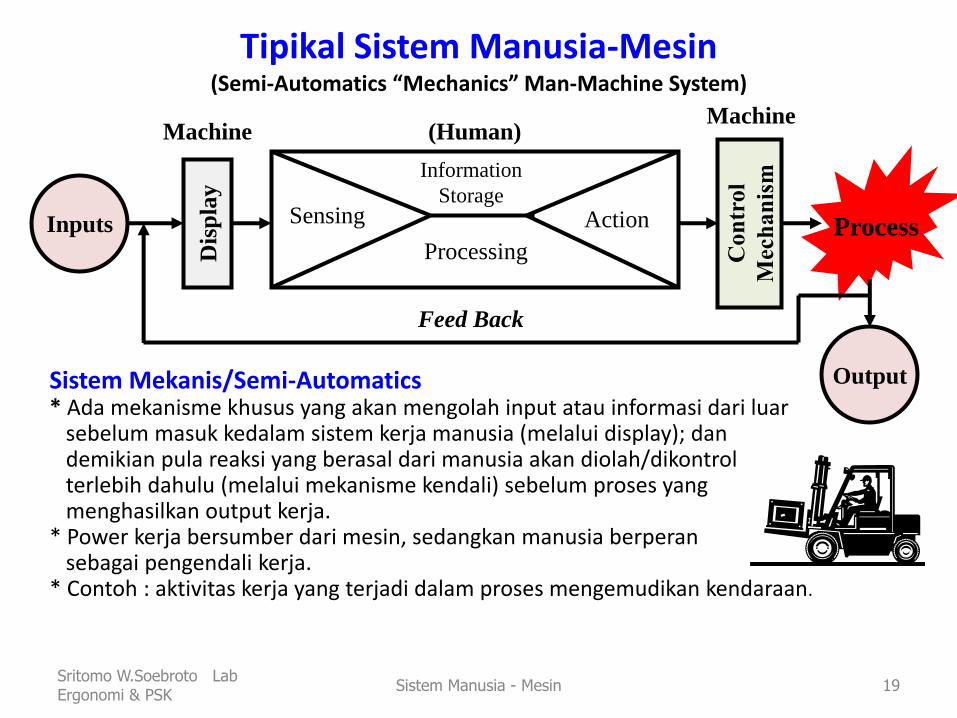
Tipikal Sistem Manusia-Mesin(Semi-Automatics “Mechanics” Man-Machine System)
Sistem Mekanis/Semi-Automatics* Ada mekanisme khusus yang akan mengolah input atau informasi dari luar
sebelum masuk kedalam sistem kerja manusia (melalui display); dandemikian pula reaksi yang berasal dari manusia akan diolah/dikontrolterlebih dahulu (melalui mekanisme kendali) sebelum proses yang menghasilkan output kerja.
* Power kerja bersumber dari mesin, sedangkan manusia berperansebagai pengendali kerja.
* Contoh : aktivitas kerja yang terjadi dalam proses mengemudikan kendaraan.
Sritomo W.Soebroto Lab Ergonomi & PSK
Sistem Manusia - Mesin 19
Information
StorageSensing
Processing
ActionInputs
Output
Feed Back
(Human)
Dis
pla
yProcess
MachineMachine
Mekanisme Sistem Manusia-Mesin
• Recording Display : memberi informasi tentang progress dari proses kerja yang berlangsung (kinerja mesin)
• Perception : operator menyerap/menangkap informasi dari display secara visual
• Interpretation Decision : menginterpretasikan dan mengartikan informasi yang masuk dan selanjutnya membuat keputusan
• Handling of Controls : mengkomunikasikan keputusan yang diambil ke sub-sistem mesin melalui rancangan mekanisme kendali
• Control Display : memberikan petunjuk kepada operator hasil dari keputusan dan tindakannya. Selanjutnya mesin akan membawa kedalam bentuk aktivitas kerja
Sritomo W.Soebroto Lab Ergonomi & PSK
Sistem Manusia - Mesin 20
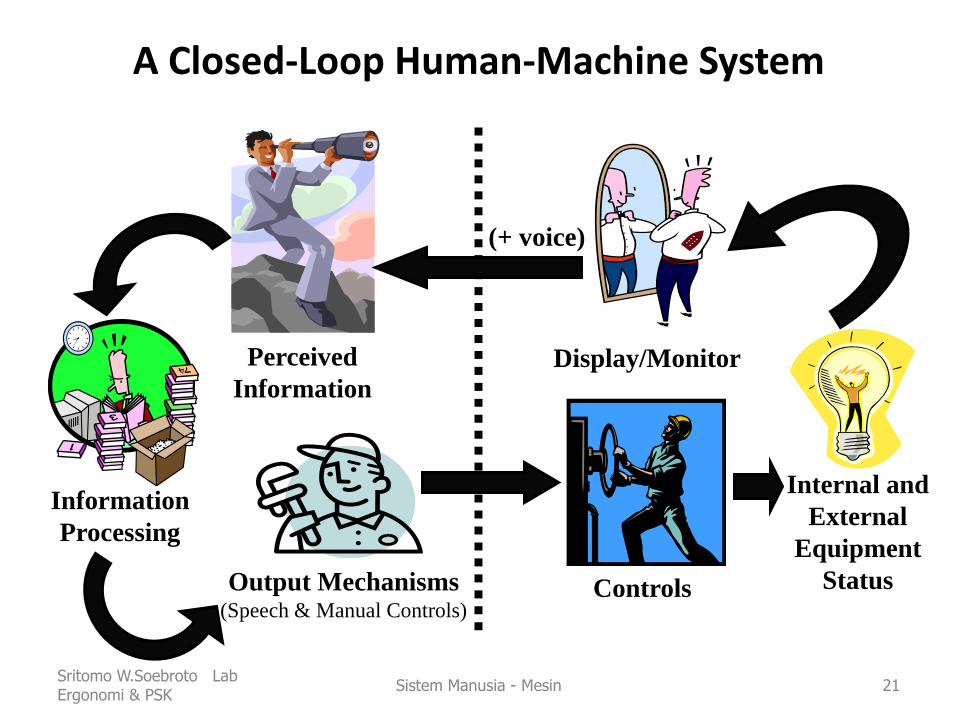
A Closed-Loop Human-Machine System
Sritomo W.Soebroto Lab Ergonomi & PSK
Sistem Manusia - Mesin 21
Display/MonitorPerceived
Information
Information
Processing
Output Mechanisms(Speech & Manual Controls)
Controls
Internal and
External
Equipment
Status
(+ voice)

Sritomo W.Soebroto Lab Ergonomi & PSK
Sistem Manusia - Mesin 22

Sritomo W.Soebroto Lab Ergonomi & PSK
Sistem Manusia - Mesin 23
Indikator di DashboardIndikator yang terletak ditengah-tengah dashboard akan memberi tahu pengemudi bahwa mobil perlu segera dibawa ke bengkel dan sekaligus
mengindikasikan komponen apa yang perlu diganti atau sekedad dibersihkan

Sritomo W.Soebroto Lab Ergonomi & PSK
Sistem Manusia - Mesin 24

Tipikal Sistem Manusia-Mesin(Automatics Man-Machine System)
Sistem Automatics
* Mesin akan melakukan fungsi kerja (sumber tenaga) dan sekaligus pengendali kerja
* Manusia (operator) berfungsi memonitor apakah mesin bekerja sesuai denganprogram ataukah tidak, memasukkan data dan mengganti program bila diperlukan.
Sritomo W.Soebroto Lab Ergonomi & PSK
Sistem Manusia - Mesin 25
Information
StorageSensing
Processing
ActionInputs Output
Feed Back
(Machine)
Dis
pla
y
Human(Monitor)

Sistem Robot ?
Sritomo W.Soebroto Lab Ergonomi & PSK
Sistem Manusia - Mesin 26

Henry Ford
• Konsep lini perakitan (assembly line) – 1908
• Pekerja hanya berdiri di suatu tempat, sedang bahan atau komponen yang dirakit yang bergerak.
• Untuk menyelesaikan perakitan satu mobil dilakukan pembagian kerja dalam 7.882 tahap pekerjaan yang terspesialisasi.
• 949 macam pekerjaan memerlukan tipikal pekerja laki-laki yang besar,kekar dan kuat secara fisik untuk mengerjakannya; 3.338 macampekerjaan yang lain bisa dilakukan oleh pekerja laki-laki dengankekuatan fisik sedang; sedangkan sisanya dapat dilakukan olehpekerja wanita atau remaja.
• Gambaran yang unik lagi bisa ditunjukkan oleh Ford, yaitu prosesperakitan mobil tersebut ada 670 macam spesialisasi aktivitas yangdapat dikerjakan oleh orang tanpa kaki, 2.637 macam aktivitas olehpekerja berkaki satu, 715 macam oleh pekerja bertangan satu, 2macam oleh pekerja tanpa tangan dan 10 macam oleh pekerja buta;sedangkan sisanya oleh mereka yang normal.
Sritomo W.Soebroto Lab Ergonomi & PSK
Sistem Manusia - Mesin 27

Sritomo W.Soebroto Lab Ergonomi & PSK
Sistem Manusia - Mesin 28
Aplikasi Sistem Robotics ?

Human-Robot Characteristics
• Energy efficiency – rendah (10-25%), baik bila ada distribusi dan tidak terpusat
• Fatigue & downtime – perlu periodic rests, vacation,dll.. Various personal problems (injuries,absenteeism, dll)
• Difference in characteristics – 100-150% variationexpected.
• Kecepatan reaksi – berkisar antara ¼ -1/3 detik
• Signal processing – primarily single channel, dapatdi”switch” diantara tugas-tugas yang ada
• Social/psychological needs – emotional sensitivity totask structure, simplified/ enriched, social valueeffects.
• Intelligence – memiliki “judgment” untuk mengatasiproblem unpredictable, dapat mengantisipasiproblem yang muncul.
• Memory – kapasitas tak terbatas, tidak applicable,directed forgetting very limited, very limitedworking register (5 items).
• Reasoning – inductive reasoning
• Relatif tinggi/besar (120-135 kg), relatif konstantidak peduli besar/ kecil beban kerja
• Tdk ada kelelahan selama periode di antara waktumaintenance, preventive maintenance requiredperiodically, no personal requirement.
• Hanya bila direncanakan untuk berbeda
• Bervariasi dari cepat (no delay) s/d lambat(tergantung program).
• s/d 24 input/ouput channel dan dapat ditam-bahsesuai dengan program dan kebutuhan
• Tidak ada
• No judgment ability, decision making dibatasi olehcontrol programs.
• Dibatasi dengan controlling facilities, memorypartitioning possible for enhanced datastorage/retrieval efficiency, can forget fast with acommand.
• Good deductive reasoning, poor inductive capability
Sritomo W.Soebroto Lab Ergonomi & PSK
Sistem Manusia - Mesin 29
Human Robot

Automatics Man-Machine System
Sritomo W.Soebroto Lab Ergonomi & PSK
Sistem Manusia - Mesin 30

Development Human-Machine Systems
Sritomo W.Soebroto Lab Ergonomi & PSK
Sistem Manusia - Mesin 31
Requirements
Defined
Mission and
Functions
Defined
Concept
Optimization
Function
Allocation
Subsystem Definition
Human-Machine
Equipment Req.
Detailed System Design
FabricationSystem Integration
and Evaluation
Task & Description
Analysis
Skill & Knowledge Req.
Workload and
Error Prediction
Job Design & Staffing
Selection &
Training
Human
Factors
Engineering
Information & Control
Requirement
“Human Functions”“Machine/Equipment
Functions”
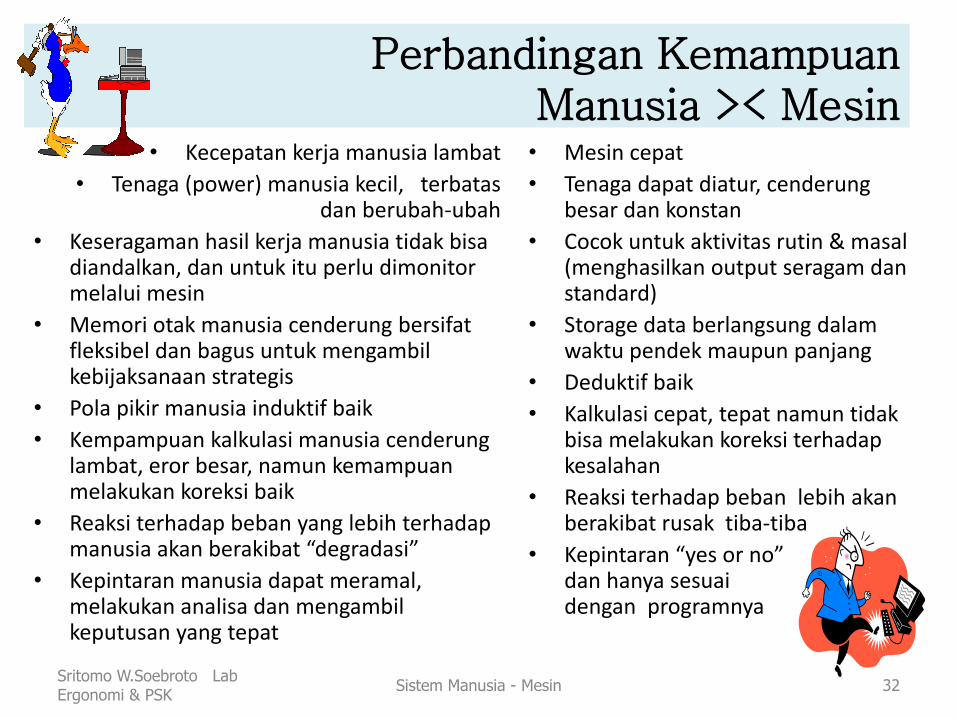
Perbandingan KemampuanManusia >< Mesin
• Kecepatan kerja manusia lambat
• Tenaga (power) manusia kecil, terbatas dan berubah-ubah
• Keseragaman hasil kerja manusia tidak bisa diandalkan, dan untuk itu perlu dimonitor melalui mesin
• Memori otak manusia cenderung bersifat fleksibel dan bagus untuk mengambil kebijaksanaan strategis
• Pola pikir manusia induktif baik
• Kempampuan kalkulasi manusia cenderung lambat, eror besar, namun kemampuan melakukan koreksi baik
• Reaksi terhadap beban yang lebih terhadap manusia akan berakibat “degradasi”
• Kepintaran manusia dapat meramal, melakukan analisa dan mengambil keputusan yang tepat
• Mesin cepat
• Tenaga dapat diatur, cenderung besar dan konstan
• Cocok untuk aktivitas rutin & masal (menghasilkan output seragam dan standard)
• Storage data berlangsung dalam waktu pendek maupun panjang
• Deduktif baik
• Kalkulasi cepat, tepat namun tidak bisa melakukan koreksi terhadap kesalahan
• Reaksi terhadap beban lebih akan berakibat rusak tiba-tiba
• Kepintaran “yes or no”dan hanya sesuai dengan programnya
Sritomo W.Soebroto Lab Ergonomi & PSK
Sistem Manusia - Mesin 32

BLEEX(the Berkeley Lower Extremities Exoskeleton)
• Tungkai robotik buatan Laboratorium HumanEngineering and Robotic, UCLA – Berkeley(USA).
• Memadukan intelektualitas manusia dankekuatan mesin.
• Dirancang untuk membantu orang-orangtertentu seperti tentara, pemadam kebakaran,pendaki gunung, dll yang harus membawabeban berat dalam jarak jauh.
• Bisa membantu tim petugas penyelamatmembawa peralatan berat ke gedung-gedungtinggi; atau bisa untuk mengubah tentara yangletih menjadi tentara super bertenaga hebatyang mampu membawa beban berat dalamjarak jauh dan berjam-jam.
• Manusia bisa membawa exoskeleton seberat50 kg plus ransel 35 kg, tapi merasa seolah-olah hanya membawa beban 2.5 kg.
Sritomo W.Soebroto Lab Ergonomi & PSK
Sistem Manusia - Mesin 33
BLEEX(the Berkeley Lower Extremities Exoskeleton)
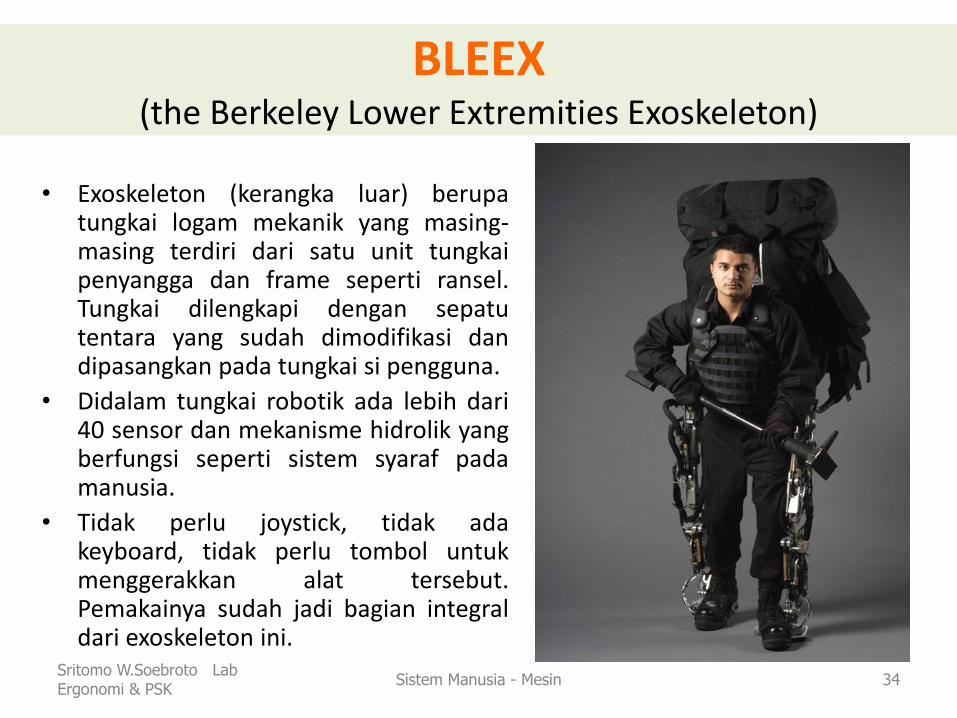
• Exoskeleton (kerangka luar) berupatungkai logam mekanik yang masing-masing terdiri dari satu unit tungkaipenyangga dan frame seperti ransel.Tungkai dilengkapi dengan sepatutentara yang sudah dimodifikasi dandipasangkan pada tungkai si pengguna.
• Didalam tungkai robotik ada lebih dari40 sensor dan mekanisme hidrolik yangberfungsi seperti sistem syaraf padamanusia.
• Tidak perlu joystick, tidak adakeyboard, tidak perlu tombol untukmenggerakkan alat tersebut.Pemakainya sudah jadi bagian integraldari exoskeleton ini.
Sritomo W.Soebroto Lab Ergonomi & PSK
Sistem Manusia - Mesin 34

Bleex(the Berkeley Lower Extremities Exoskeleton)
Sritomo W.Soebroto Lab Ergonomi & PSK
Sistem Manusia - Mesin 35
http://www.me.berkeley.edu/hel/bleex.htm