Sainskan Dunia dengan Tanganmu Email : … · 2019-07-20 · Panjang pegas ketika tidak teregang...
19
Sainskan Dunia dengan Tanganmu Email : [email protected] ID Line : mr_sainsworld Contact Person : 0895701002686 1. Sebuah bola berada bermassa dan berjari-jari berada di dalam sebuah ruangan berdebu homogen dengan viskositas . Bola ini dilemparkan dari lantai dengan kecepatan awal 0 dan membentuk sudut dengan lantai. a. Akibat debu, bola akan mendapat gaya hambat yang berbentuk ℎ = − . Jika massa jenis debu sangat kecil sehingga gaya hambat pada bola ini hanya disebabkan oleh kekentalannya, tentukanlah nilai konstanta ! b. Tentukan ketinggian maksimum bola dari lantai! c. Tentukan perpindahan horizontal maksimum bola (jarak titik awal dan titik saat dia tiba kembali di lantai)! Gunakan pendekatan nilai yang kecil. Petunjuk : = ln + = 1 + Untuk nilai yang cukup kecil berlaku ≈ 1 + Solusi a. Gaya hambat pada bola adalah gaya stokes ℎ = = − 6 Maka = 6 b. Persamaan gerak bola ℎ + = − + + − = + Dari definisi percepatan = dan = = dan = Untuk masing-masing arah akan didapat Arah − =
Transcript of Sainskan Dunia dengan Tanganmu Email : … · 2019-07-20 · Panjang pegas ketika tidak teregang...

Sainskan Dunia dengan Tanganmu Email : [email protected] ID Line : mr_sainsworld Contact Person : 0895701002686
1. Sebuah bola berada bermassa 𝑚 dan berjari-jari berada di dalam sebuah ruangan
berdebu homogen dengan viskositas 𝜂. Bola ini dilemparkan dari lantai dengan
kecepatan awal 𝑣0 dan membentuk sudut 𝜃 dengan lantai.
a. Akibat debu, bola akan mendapat gaya hambat yang berbentuk 𝐹 ℎ = −𝑘𝑣 . Jika massa
jenis debu sangat kecil sehingga gaya hambat pada bola ini hanya disebabkan oleh
kekentalannya, tentukanlah nilai konstanta 𝑘!
b. Tentukan ketinggian maksimum bola dari lantai!
c. Tentukan perpindahan horizontal maksimum bola (jarak titik awal dan titik saat dia
tiba kembali di lantai)! Gunakan pendekatan nilai 𝑘 yang kecil.
Petunjuk :
𝑑𝑥
𝑥= ln 𝑥 + 𝐶
𝑒𝛼𝑥𝑑𝑥 =1
𝛼𝑒𝛼𝑥 + 𝐶
Untuk nilai 𝛼 yang cukup kecil berlaku
𝑒𝛼𝑥 ≈ 1 + 𝛼𝑥
Solusi
a. Gaya hambat pada bola adalah gaya stokes
𝐹 ℎ = 𝐹 𝑠 = −6𝜋𝜂𝑅𝑣
Maka
𝑘 = 6𝜋𝜂𝑅
b. Persamaan gerak bola
𝐹 ℎ + 𝑤 = 𝑚𝑎
−𝑘 𝑣𝑥𝑖 + 𝑣𝑦𝑗 + 𝑚𝑔 −𝑗 = 𝑚 𝑎𝑥𝑖 + 𝑎𝑦𝑗
Dari definisi percepatan
𝑎𝑥 =𝑑𝑣𝑥
𝑑𝑡 dan 𝑎𝑦 =
𝑑𝑣𝑦
𝑑𝑡
𝑣𝑥 =𝑑𝑥
𝑑𝑡 dan 𝑣𝑦 =
𝑑𝑦
𝑑𝑡
Untuk masing-masing arah akan didapat
Arah 𝑖
−𝑘𝑣𝑥 = 𝑚𝑑𝑣𝑥
𝑑𝑡

Sainskan Dunia dengan Tanganmu Email : [email protected] ID Line : mr_sainsworld Contact Person : 0895701002686
𝑑𝑣𝑥
𝑣𝑥
𝑣𝑥
𝑣0𝑥
= −𝑘
𝑚 𝑑𝑡
𝑡
0
ln 𝑣𝑥
𝑣0𝑥 = −
𝑘
𝑚𝑡
Atau
𝑣𝑥 = 𝑣0𝑥𝑒−
𝑘𝑚
𝑡
Berikutnya
𝑑𝑥𝑥
0
= 𝑣0𝑥 𝑒−
𝑘𝑚
𝑡𝑑𝑡
𝑡
0
𝑥 =𝑚
𝑘𝑣0𝑥 1 − 𝑒
−𝑘𝑚
𝑡
Arah 𝑗
−𝑘𝑣𝑦 − 𝑚𝑔 = 𝑚𝑑𝑣𝑦
𝑑𝑡
𝑑 𝑘𝑣𝑦 + 𝑚𝑔
𝑘𝑣𝑦 + 𝑚𝑔
𝑣𝑦
𝑣0𝑦
= −𝑘
𝑚 𝑑𝑡
𝑡
0
ln 𝑘𝑣𝑦 + 𝑚𝑔
𝑘𝑣0𝑦 + 𝑚𝑔 = −
𝑘
𝑚𝑡
Atau
𝑣𝑦 = 𝑣0𝑦𝑒−
𝑘𝑚
𝑡−
𝑚
𝑘𝑔 1 − 𝑒
−𝑘𝑚
𝑡
Berikutnya
𝑑𝑦𝑦
0
= 𝑣0𝑦 𝑒−
𝑘𝑚
𝑡𝑑𝑡
𝑡
0
−𝑚
𝑘𝑔 1 − 𝑒
−𝑘𝑚
𝑡 𝑑𝑡
𝑡
0
𝑦 =𝑚
𝑘𝑣0𝑦 1 − 𝑒
−𝑘𝑚
𝑡 −
𝑚
𝑘
2
𝑔 𝑘
𝑚𝑡 − 𝑒
−𝑘𝑚
𝑡
Saat mencapai titik tertinggi, 𝑣𝑦 = 0
0 = 𝑣0𝑦𝑒−
𝑘𝑚
𝑡−
𝑚
𝑘𝑔 1 − 𝑒
−𝑘𝑚
𝑡
𝑚𝑔 + 𝑘𝑣0𝑦 𝑒−
𝑘𝑚
𝑡= 𝑚𝑔
𝑒−
𝑘𝑚
𝑡=
𝑚𝑔
𝑚𝑔 + 𝑘𝑣0𝑦 dan 𝑡 =
𝑚
𝑘ln 1 +
𝑘𝑣0𝑦
𝑚𝑔
Sehingga, karena 𝑣0𝑦 = 𝑣0 sin 𝜃, akan kita peroleh

Sainskan Dunia dengan Tanganmu Email : [email protected] ID Line : mr_sainsworld Contact Person : 0895701002686
𝑦maks =𝑚
𝑘𝑣0 sin 𝜃
𝑘𝑣0 sin 𝜃
𝑚𝑔 + 𝑘𝑣0 sin 𝜃
− 𝑚
𝑘
2
𝑔 ln 1 +𝑘𝑣0 sin 𝜃
𝑚𝑔 −
𝑚𝑔
𝑚𝑔 + 𝑘𝑣0 sin 𝜃
c. Saat mencapai titik terjauh, 𝑦 = 0
0 =𝑚
𝑘𝑣0𝑦 1 − 𝑒
−𝑘𝑚
𝑡 −
𝑚
𝑘
2
𝑔 𝑘
𝑚𝑡 − 𝑒
−𝑘𝑚
𝑡
−𝑚
𝑘𝑣0𝑦 +
𝑚
𝑘
2
𝑔 𝑒−
𝑘𝑚
𝑡=
𝑚
𝑘 𝑣0𝑦 − 𝑔𝑡
Gunakan
𝑒−
𝑘𝑚
𝑡≈ 1 −
𝑘
𝑚𝑡
Sehingga
2𝑚
𝑘𝑣0𝑦 −
𝑚
𝑘
2
𝑔 = 𝑣0𝑦𝑡
𝑡 =𝑚
𝑘 2 −
𝑚𝑔
𝑘𝑣0𝑦
Sehingga
𝑒−
𝑘𝑚
𝑡= 𝑒
− 2−𝑚𝑔𝑘𝑣0𝑦
Untuk 𝑣0𝑦 = 𝑣0 sin 𝜃 dan 𝑣0𝑥 = 𝑣0 cos 𝜃 akan kita peroleh
𝑥maks =𝑚
𝑘𝑣0 cos 𝜃 1 − 𝑒
𝑚𝑔
𝑘𝑣0 sin𝜃−2

Sainskan Dunia dengan Tanganmu Email : [email protected] ID Line : mr_sainsworld Contact Person : 0895701002686
2. Terdapat sebuah cakram bermassa 𝑀 berjari-jari 𝑅 yang berotasi dengan kecepatan
sudut konstan 𝜔 terhadap sumbu 𝑧. Pusat massa cakram 𝑂 ini dibuat diam sehingga
gerakannya hanya rotasi murni. Terdapat pula sebuah batang bermassa 𝑚 dan panjang
2𝐿 yang di pasang pada suatu poros bebas gesekan di pinggir cakram di titik A yang ikut
berputar bersama cakram sehingga batang juga berotasi bersama cakram. Batang
membentuk sudut 𝜃 terhadap sumbu radial positif. Percepatan gravitasi adalah 𝑔 yang
arahnya ke bawah pada sumbu 𝑧 negatif.
a. Gunakan pusat cakram sebagai titik asal sistem koordinat. Tentukan vektor posisi
dan vektor kecepatan pusat massa batang dinyatakan dalam 𝑅, 𝐿, 𝜃, 𝜃 , dan 𝜔!
b. Tentukan energi kinetik dan energi potensial sistem dan nyatakan dalam 𝑚, 𝑀, 𝑅, 𝐿,
𝜃, 𝜃 , 𝑔 dan 𝜔!
c. Tentukan suatu persamaan yang memberikan nilai sudut 𝜃 untuk batang 𝑚 pada
posisi kesetimbangan (anda tidak perlu menyelesaikan persamaan ini untuk
mendapatkan sudut 𝜃 tersebut)!
d. Dari hasil pada bagian (c), buatlah suatu fungsi 𝑓1 dan 𝑓2 sebagai fungsi 𝜃 dan
gambarkan kedua fungsi ini pada satu grafik serta tentukan titik potong kedua fungsi
ini untuk batas 0 < 𝜃 < 2𝜋! Apakah makna sudut 𝜃 pada masing-masing titik potong
ini?
e. Tentukan apakah keseimbangan yang mungkin pada sistem ini (stabil, labil, atau
netral)!
f. Gambarkan diagram gaya untuk masing-masing posisi kesetimbangan untuk
memverifikasi hasil dari bagian (d) dan (e)!
𝑔
𝜔
𝑧
𝑟 𝜃 2𝐿
𝑚
𝑀
𝑅
𝑂
𝐴

Sainskan Dunia dengan Tanganmu Email : [email protected] ID Line : mr_sainsworld Contact Person : 0895701002686
g. Untuk posisi sistem pada keseimbangan stabil dan 𝑔 cot3 𝜃 < 𝜔2𝑅, jika sistem
disimpangkan dengan simpangan yang kecil, berapakah frekuensi sudut osilasi
sistem!
Solusi :
a. Vektor posisi pusat massa batang
𝑟 pm = 𝑅 + 𝐿 cos 𝜃 𝑟 + 𝐿 sin 𝜃 𝑧
Vektor kecepatan pusat massa batang
𝑣 pm =𝑑𝑟 pm
𝑑𝑡= −𝐿𝜃 sin 𝜃 𝑟 + 𝑅 + 𝐿 cos 𝜃 𝜔𝜙 + 𝐿𝜃 cos 𝜃 𝑧
b. Energi kinetik sistem
𝑇 =1
2𝐼𝑐𝜔 +
1
2𝐼𝑧𝜔
2 +1
2𝐼𝐴𝜃 2
Dengan 𝐼𝑐, 𝐼𝑧, dan 𝐼𝐴 masing-masing adalah momen inersia cakram, momen inersia
batang terhadap sumbu 𝑧 dan momen inersia batang dengan sumbu rotasi garis
singgung lingkaran yang menyinggung titik A.
𝐼𝑐 =1
2𝑀𝑅2
Untuk menghitung 𝐼𝑧 tinjau sebuah elemen massa 𝑑𝑚 pada batang yang berjarak 𝑠
dari ujung bawah batang, maka momen inersia massa 𝑑𝑚 ini terhadap sumbu 𝑧
adalah
𝑑𝐼𝑧 =𝑚
2𝐿 𝑅 + 𝑠 cos 𝜃 2𝑑𝑠
Sehingga
𝐼𝑧 =𝑚
2𝐿 𝑅 + 𝑠 cos 𝜃 2𝑑𝑠
2𝐿
0
=1
3𝑚 3𝑅2 + 4𝐿2 cos2 𝜃 + 6𝑅𝐿 cos 𝜃
Untuk 𝐼𝐴 bisa didapatkan dari teorema sumbu sejajar
𝐼𝐴 =1
12𝑚 2𝐿 2 + 𝑚𝐿2 =
4
3𝑚𝐿2
Energi kinetik sistem menjadi
𝑇 =1
4 𝑀 + 2𝑚 𝑅2𝜔 +
1
3𝑚 2𝐿2 cos2 𝜃 + 3𝑅𝐿 cos 𝜃 𝜔2 +
2
3𝑚𝐿2𝜃 2
Energi potensial sistem
𝑈 = 𝑚𝑔𝐿 sin 𝜃
c. Energi total sistem 𝐸 = 𝑇 + 𝑈
Sainskan Dunia dengan Tanganmu Email : [email protected] ID Line : mr_sainsworld Contact Person : 0895701002686
𝐸 =1
4 𝑀 + 2𝑚 𝑅2𝜔 +
2
3𝑚𝐿2𝜃 2 +
1
3𝑚 2𝐿2 cos2 𝜃 + 3𝑅𝐿 cos 𝜃 𝜔2 + 𝑚𝑔𝐿 sin 𝜃
Energi potensial effektif sistem
𝑈ef = −1
3𝑚 2𝐿2 cos2 𝜃 + 3𝑅𝐿 cos 𝜃 𝜔2 + 𝑚𝑔𝐿 sin 𝜃
Saat sistem setimbang𝑑𝑈ef
𝑑𝜃= 0
−1
3 −4𝐿 sin 𝜃 cos 𝜃 − 3𝑅 sin 𝜃 𝜔2 + 𝑔 cos 𝜃 = 0
cot 𝜃 = −𝐿𝜔2
𝑔 4
3cos 𝜃 +
𝑅
𝐿
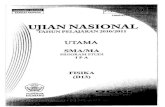
d. Dari hasil di atas saya pilih (boleh tertukar ataupun berbeda asalkan equivalen
dengan hasil ini)
𝑓1 𝜃 = cot 𝜃
𝑓2 𝜃 = −𝐿𝜔2
𝑔 4
3cos 𝜃 +
𝑅
𝐿
Dalam satu grafik dapat digambarkan sebagai berikut
Sudut 𝜃2, 𝜃3, dan 𝜃4 adalah posisi kesetimbangan sistem dan merupakan penyelesaian
dari persamaan pada bagian (c)
e. Uji turunan kedua 𝑈ef
𝑑𝑈ef
𝑑𝜃= 𝑚𝜔2
4
3𝐿 cos 𝜃 + 𝑅 𝐿 sin 𝜃 + 𝑚𝑔𝐿 cos 𝜃
𝑑2𝑈ef
𝑑𝜃2= −
4
3𝑚𝜔2𝐿2 sin2 𝜃 + 𝑚𝜔2𝐿
4
3𝐿 cos2 𝜃 + 𝑅 cos 𝜃 − 𝑚𝑔𝐿 sin 𝜃
𝜃4
𝜃3 𝜃2
𝑓
𝜃
−𝑅𝜔2
𝑔
− 4𝐿 + 3𝑅 𝜔2
3𝑔
4𝐿 − 3𝑅 𝜔2
3𝑔
0 𝜋/2 𝜋
3𝜋/2 2𝜋
𝑓1 𝑓1
𝑓2
Sainskan Dunia dengan Tanganmu Email : [email protected] ID Line : mr_sainsworld Contact Person : 0895701002686
Atau agar sistem stabil
𝑑2𝑈ef
𝑑𝜃2=
𝑚𝐿 sin2 𝜃
cos 𝜃 𝜔2𝑅 − 𝑔 cot3 𝜃 > 0
Untuk sudut 𝜃2 𝜋/2 < 𝜃2 < 𝜋 , sin 𝜃2 > 0, cos 𝜃2 < 0, dan cot 𝜃2 < 0 sehingga
𝑑2𝑈ef
𝑑𝜃2 𝜃2
< 0
Sistem berada dalam kesetimbangan labil
Untuk sudut 𝜃3 𝜋 < 𝜃3 < 3𝜋/2 , sin 𝜃3 < 0, cos 𝜃3 < 0, dan cot 𝜃3 > 0 sehingga
𝑑2𝑈ef
𝑑𝜃2 𝜃3
=𝑚𝐿 sin2 𝜃3
cos 𝜃3 𝑔 cot3 𝜃3 − 𝜔2𝑅
Sistem berada dalam kesetimbangan labil jika
𝑔 cot3 𝜃3 < 𝜔2𝑅
Dan dalam kesetimbangan stabil jika
𝑔 cot3 𝜃3 > 𝜔2𝑅
Untuk sudut 𝜃4 3𝜋/2 < 𝜃4 < 2𝜋 , sin 𝜃4 < 0, cos 𝜃4 > 0, dan cot 𝜃4 < 0 sehingga
𝑑2𝑈ef
𝑑𝜃2 𝜃4
> 0
Sistem berada dalam kesetimbangan stabil
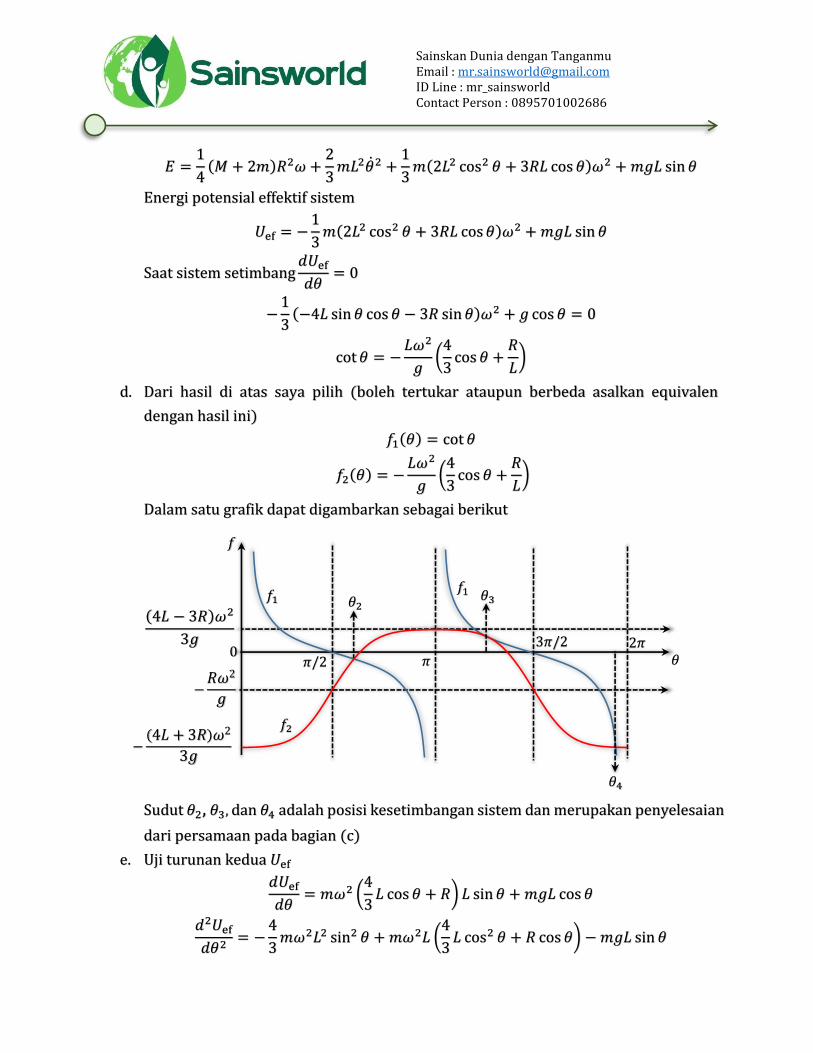
f. Berikut diagram gayanya.
g. Energi total sistem
𝐸 =1
4 𝑀 + 2𝑚 𝑅2𝜔 +
2
3𝑚𝐿2𝜃 2 +
1
3𝑚 2𝐿2 cos2 𝜃 + 3𝑅𝐿 cos 𝜃 𝜔2 + 𝑚𝑔𝐿 sin 𝜃
𝜃2 𝜃3
𝜃4
𝐹𝑠
𝑚𝑔
𝑇 𝑇
𝑇 𝑚𝑔
𝑚𝑔
𝐹𝑠
𝐹𝑠

Sainskan Dunia dengan Tanganmu Email : [email protected] ID Line : mr_sainsworld Contact Person : 0895701002686
Energi sistem kekal sehingga
𝑑𝐸
𝑑𝑡= 0 =
4
3𝑚𝐿2𝜃 𝜃 +
1
3𝑚 −4𝐿2 sin 𝜃 cos 𝜃 − 3𝑅𝐿 sin 𝜃 𝜃 𝜔2 + 𝑚𝑔𝐿𝜃 cos 𝜃
Atau
𝜃 − 𝜔2 sin 𝜃 cos 𝜃 −3𝑅
4𝐿𝜔2 sin 𝜃 +
3𝑔
4𝐿cos 𝜃 = 0
Karena 𝑔 cot3 𝜃 < 𝜔2𝑅, posisi setimbang sistem hanya ada di 𝜃 = 𝜃4. Misal sekarang
batang disimpangkan dengan simpangan yang kecil sehingga 𝜃 = 𝜃4 + 𝜙 yang
mengakibatkan pula 𝜃 = 𝜙 dengan 𝜙 << 1 radian, maka
sin 𝜃 ≈ sin 𝜃4 + 𝜙 cos 𝜃4
cos 𝜃 ≈ cos 𝜃4 − 𝜙 sin 𝜃4
sin 𝜃 cos 𝜃 ≈ 𝜙 cos 2𝜃4 + sin 𝜃4 cos 𝜃4
Saat setimbang
−𝜔2 sin 𝜃4 cos 𝜃4 −3𝑅
4𝐿𝜔2 sin 𝜃4 +
3𝑔
4𝐿cos 𝜃4 = 0
Saat tersimpang
𝜙 − 𝜔2𝜙 cos 2𝜃4 −3𝑅
4𝐿𝜔2𝜙 cos 𝜃4 −
3𝑔
4𝐿𝜙 sin 𝜃4 = 0
Karena 𝜃4 di kuadran 4, maka sin 𝜃4 < 0
𝜙 + 3𝑔
4𝐿𝜔2 sin 𝜃4 − cos 2𝜃4 −
3𝑅
4𝐿cos 𝜃4 𝜔2𝜙 = 0
Atau
𝜔0 = 𝜔 3𝑔
4𝐿𝜔2 sin 𝜃4 − cos 2𝜃4 −
3𝑅
4𝐿cos 𝜃4
Dengan syarat
3𝑔
4𝐿𝜔2 sin 𝜃4 > cos 2𝜃4 +
3𝑅
4𝐿cos 𝜃4

Sainskan Dunia dengan Tanganmu Email : [email protected] ID Line : mr_sainsworld Contact Person : 0895701002686
3. Dua buah kotak bermassa 𝑀 ditahan atas lantai dengan sebuah penahan sehingga
keduanya tidak dapat bergerak. Kedua kotak ini terpisah sejauh 𝑑 = 2 𝐿 + 𝑅 . Kemudian
sebuah silinder berongga tanpa tutup berdinding tipis dengan massa 𝑚 dan jari-jari 𝑅
dihubungkan dengan dua buah pegas berkonstanta 𝑘 yang dihubungkan dan kedua kotak
seperti tampak pada gambar. Panjang pegas ketika tidak teregang adalah 𝐿. lantai licin
sempurna sehingga silinder tidak akan berotasi. Sebuah partikel kecil bermassa 𝑚
berada di permukaan dalam silinder berongga.
a. Untuk osilasi yang kecil, tentukan frekuensi osilasi untuk modus getar sistem ini!
b. Untuk limit 𝑘 → 0, tentukan frekuensi osilasi sistem! Apakah makna fisis dari
frekuensi ini?
c. Untuk limit 𝑘 → ∞, tentukan frekuensi osilasi sistem! Apakah makna fisis dari
frekuensi ini?
d. Sekarang partikel menempel pada permukaan dalam silinder tepat di titik
terendahnya. Penahan kedua kotak kemudian dilepas, tentukan frekuensi osilasi
untuk modus getar sistem ini!
e. Pada saat awal (𝑡 = 0) sistem yang baru ini masih diam, kemudian diberikan impuls
Δ𝑝 pada kotak sebelah kiri. Tentukan persamaan posisi silinder relatif terhadap
posisi awalnya sebagai fungsi waktu.
Solusi :
𝑑
𝑘 𝑘 𝑀 𝑀
𝑚
𝑚
𝑅
licin licin
𝑑
𝑘 𝑘 𝑀 𝑀
𝑚
𝑚
𝑅
licin menempel

Sainskan Dunia dengan Tanganmu Email : [email protected] ID Line : mr_sainsworld Contact Person : 0895701002686
a. Pusat massa cincin sebagai titik asal. Misal cincin diberi simpangan 𝑥 dan partikel
diberi simpangan sudut 𝜃 berlawanan arah jarum jam dengan acuan garis vertikal di
bawah pusat massa sistem, maka
𝑟 𝑐 = 𝑥𝑖 dan 𝑟 𝑝 = 𝑥 + 𝑅 sin 𝜃 𝑖 + 𝑅 cos 𝜃 𝑗
dan juga
𝑣 𝑐 = 𝑥 𝑖
𝑣 𝑝 = 𝑥 + 𝑅𝜃 cos 𝜃 𝑖 − 𝑅𝜃 sin 𝜃 𝑗
Serta
𝑎 𝑐 = 𝑥 𝑖
𝑎 𝑝 = 𝑥 + 𝑅𝜃 cos 𝜃 − 𝑅𝜃 2 sin 𝜃 𝑖 − 𝑅𝜃 sin 𝜃 + 𝑅𝜃 2 cos 𝜃 𝑗
Gaya yang bekerja pada cincin dan partikel
𝐹 𝑐 = −2𝑘𝑥 + 𝑁 sin 𝜃 𝑖 + 𝑁𝐿 − 𝑁 cos 𝜃 − 𝑚𝑔 𝑗
𝐹 𝑝 = −𝑁 sin 𝜃 𝑖 + 𝑁 cos 𝜃 − 𝑚𝑔 𝑗
Hk. II Newton
𝐹 = 𝑚𝑎
(untuk cincin)
Arah 𝑖
𝑁 sin 𝜃 = 𝑚𝑥 + 2𝑘𝑥 … 1
Arah 𝑗
𝑁𝐿 = 𝑁 cos 𝜃 + 𝑚𝑔 … 2
(untuk partikel)
Arah 𝑖
𝑁 sin 𝜃 = −𝑚𝑥 − 𝑚𝑅𝜃 cos 𝜃 + 𝑚𝑅𝜃 2 sin 𝜃 … 3
Arah 𝑗
𝑁 cos 𝜃 = 𝑚𝑔 + 𝑚𝑅𝜃 sin 𝜃 + 𝑚𝑅𝜃 2 cos 𝜃 … 4
Dari (1) dan (3)
2𝑚𝑥 + 2𝑘𝑥 + 𝑚𝑅𝜃 cos 𝜃 − 𝑚𝑅𝜃 2 sin 𝜃 = 0… 5
Dari (3) dan (4)
𝑥 cos 𝜃 + 𝑅𝜃 + 𝑔 sin 𝜃 = 0 … 6
Untuk osilasi kecil sin 𝜃 ≈ 𝜃, cos 𝜃 ≈ 1, 𝜃 2 ≈ 0, maka
2𝑚𝑥 + 2𝑘𝑥 + 𝑚𝑅𝜃 = 0
𝑥 + 𝑅𝜃 + 𝑔𝜃 = 0
Untuk osilasi berlaku 𝑥 = −𝜔2𝑥 dan 𝜃 = −𝜔2𝜃 sehingga

Sainskan Dunia dengan Tanganmu Email : [email protected] ID Line : mr_sainsworld Contact Person : 0895701002686
2 𝑘 − 𝑚𝜔2 𝑥 − 𝑚𝜔2𝑅𝜃 = 0
−𝜔2𝑥 + 𝑔 − 𝜔2𝑅 𝜃 = 0
Dalam bentuk matriks
2 𝑘 − 𝑚𝜔2 −𝑚𝜔2𝑅
−𝜔2 𝑔 − 𝜔2𝑅
𝑥𝜃 =
00
Agar hasilnya tidak nol, determinan matriks kiri harus nol
2 𝑘 − 𝑚𝜔2 −𝑚𝜔2𝑅
−𝜔2 𝑔 − 𝜔2𝑅 = 0
2 𝑘 − 𝑚𝜔2 𝑔 − 𝜔2𝑅 − −𝜔2 −𝑚𝜔2𝑅 = 0
𝑚𝑅𝜔4 − 2 𝑘𝑅 + 𝑚𝑔 𝜔2 + 2𝑘𝑔 = 0
Sehingga
𝜔2 =
𝑘𝑅 + 𝑚𝑔 ± 𝑘2𝑅2 + 𝑚2𝑔2
𝑚𝑅
b. Untuk limit 𝑘 → 0
𝜔1 = 0 atau 𝜔2 = 2𝑔
𝑅
Ini adalah frekuensi osilasi sistem jika tidak terdapat pegas
c. Untuk limit 𝑘 → ∞
𝜔2 = 𝑘
𝑚 1 +
𝑚𝑔
𝑘𝑅 ± 1
Sehingga
𝜔1 = 2𝑘
𝑚 dan 𝜔2 =
𝑔
𝑅
Ini adalah frekuensi sudut osilasi jika pegas sangat kaku. Cincin akan berosilasi pada
sumbu 𝑥 dengan frekuensi sudut 𝜔1 dan partikel berosilasi di permukaan dalam
cincin dengan frekuensi sudut 𝜔2.
d. Sistem ini laksana 3 benda yang masing-masing bermassa 𝑀, 2m, dan 𝑀 dan
dihubungkan oleh dua buah pegas. Misal ketiganya disimpangkan dengan simpangan
𝑥1, 𝑥2, dan 𝑥3 untuk kotak kiri, silinder dan partikel, serta kotak kanan. Persamaan
gerak sistem menjadi
𝑘 𝑥2 − 𝑥1 = 𝑀𝑥 1
−𝑘 𝑥2 − 𝑥1 + 𝑘 𝑥3 − 𝑥2 = 2𝑚𝑥 2

Sainskan Dunia dengan Tanganmu Email : [email protected] ID Line : mr_sainsworld Contact Person : 0895701002686
−𝑘 𝑥3 − 𝑥2 = 𝑀𝑥 3
Gunakan 𝑥 1 = −𝜔2𝑥1, 𝑥 2 = −𝜔2𝑥2, dan 𝑥 3 = −𝜔2𝑥3 sehingga
𝑘 − 𝑀𝜔2 𝑥1 − 𝑘𝑥2 = 0
−𝑘𝑥1 + 2 𝑘 − 𝑚𝜔2 𝑥2 − 𝑘𝑥3 = 0
−𝑘𝑥2 + 𝑘 − 𝑀𝜔2 𝑥3 = 0
Dalam bentuk matriks
𝑘 − 𝑀𝜔2 −𝑘 0
−𝑘 2 𝑘 − 𝑚𝜔2 −𝑘
0 −𝑘 𝑘 − 𝑀𝜔2
𝑥1
𝑥2
𝑥3
= 000
Determinan matriks kiri harus nol
𝑘 − 𝑀𝜔2 −𝑘 0
−𝑘 2 𝑘 − 𝑚𝜔2 −𝑘
0 −𝑘 𝑘 − 𝑀𝜔2
= 0
𝑘 − 𝑀𝜔2 2 𝑘 − 𝑚𝜔2 𝑘 − 𝑀𝜔2 − 𝑘 − 𝑀𝜔2 −𝑘 −𝑘 − 𝑘 − 𝑀𝜔2 −𝑘 −𝑘 = 0
𝑀2𝑚𝜔6 − 𝑘𝑀 𝑀 + 2𝑚 𝜔4 + 𝑘2 𝑀 + 𝑚 𝜔2 = 0
Sederhanakan menjadi
𝑀𝜔2 𝑀𝜔2 − 𝑘 𝑀𝑚𝜔2 − 𝑘 𝑀 + 𝑚 = 0
Kita dapatkan tiga frekuensi sudut untuk tiga modus getar yaitu
𝜔1 = 0,𝜔2 = 𝑘
𝑀, dan 𝜔3 =
𝑘 𝑀 + 𝑚
𝑀𝑚
e. Persamaan gerak masing-masing benda untuk masing-masing modus getar
Modus getar 1 (𝜔1)
𝑥1 = 𝑥2 = 𝑥3 = 𝑥0 + 𝑣0𝑡
Modus getar 2 (𝜔2)
𝑥1 = −𝑥3 = 𝐴 sin 𝜔2𝑡 + 𝜙2 , 𝑥2 = 0
Modus getar 2 (𝜔2)
𝑥1 = −𝑚
𝑀𝑥2 = 𝑥3 = 𝐵 sin 𝜔3𝑡 + 𝜙3
Persamaan gerak sistem adalah superposisi dari persamaan gerak pada masing-
masing modus
𝑥1 𝑡 = 𝑥0 + 𝑣0𝑡 + 𝐴 sin 𝜔2𝑡 + 𝜙2 + 𝐵 sin 𝜔3𝑡 + 𝜙3
𝑥2 𝑡 = 𝑥0 + 𝑣0𝑡 −𝑀
𝑚𝐵 sin 𝜔3𝑡 + 𝜙3
𝑥3 𝑡 = 𝑥0 + 𝑣0𝑡 − 𝐴 sin 𝜔2𝑡 + 𝜙2 + 𝐵 sin 𝜔3𝑡 + 𝜙3

Sainskan Dunia dengan Tanganmu Email : [email protected] ID Line : mr_sainsworld Contact Person : 0895701002686
Turunkan satu kali terhadap waktu
𝑣1 𝑡 = 𝑣0 + 𝐴𝜔2 cos 𝜔2𝑡 + 𝜙2 + 𝐵𝜔3 cos 𝜔3𝑡 + 𝜙3
𝑣2 𝑡 = 𝑣0 −𝑀
𝑚𝐵𝜔3 cos 𝜔3𝑡 + 𝜙3
𝑣3 𝑡 = 𝑣0 − 𝐴𝜔2 cos 𝜔2𝑡 + 𝜙2 + 𝐵𝜔3 cos 𝜔3𝑡 + 𝜙3
Saat 𝑡 = 0, 𝑥1 = 𝑥2 = 𝑥3 = 0 dan 𝑣1 = Δ𝑝/𝑀 serta 𝑣2 = 𝑣3 = 0
Maka akan didapatkan
𝑥0 = 𝜙1 = 𝜙2 = 0, 𝑣0 =Δ𝑝
2 𝑀 + 𝑚 , 𝐴 =
Δ𝑝
2
𝑀
𝑘, dan 𝐵 =
Δ𝑝
2
𝑚3
2𝑘𝑀 𝑀 + 𝑚 3
Sehingga
𝑥2 𝑡 =Δ𝑝
2 𝑀 + 𝑚 𝑡 −
Δ𝑝
2
𝑀𝑚
2𝑘 𝑀 + 𝑚 3sin 𝑡
𝑘 𝑀 + 𝑚
𝑀𝑚

Sainskan Dunia dengan Tanganmu Email : [email protected] ID Line : mr_sainsworld Contact Person : 0895701002686
4. Dalam sebuah sistem tata surya yang terisolasi, terdapat suatu planet bermassa 𝑚 yang
mengorbit dengan orbit lingkaran pada planet yang lebih besar bermassa 𝑀. Radius orbit
planet 𝑚 terhadap 𝑀 adalah 𝑟0. Suatu ketika, terdapat debu padat bermassa 𝑀 pula yang
menempel begitu saja secara merata pada planet 𝑀 (asumsikan setelah debu menempel
bentuk planet tetap bola).
a. Tentukan perbandingan energi sistem sesudah dan sebelum debu menempel!
b. Deskripsikan secara kualitatif bentuk orbit dari planet 𝑚 setelah debu menempel
pada planet 𝑀!
c. Tentukan jarak terdekat dan terjauh planet 𝑚 dari planet 𝑀, nyatakan dalam 𝑟0!
d. Tentukan panjang sumbu minor dan mayor dari orbit baru planet 𝑚!
e. Bagaimanakah hasil dari bagian (c) dan (d) untuk 𝑀 = 2𝑚!
Gunakan acuan energi adalah pusat massa planet 𝑀.
Solusi
a. Dari gerak melingkar diperoleh
𝑚𝑣02
𝑟0=
𝐺𝑀𝑚
𝑟02… 1 ⟹
1
2𝑚𝑣0
2 =𝐺𝑀𝑚
2𝑟0
Energi sistem sebelum debu menempel
𝐸0 =1
2𝑚𝑣0
2 −𝐺𝑀𝑚
𝑟0⟹ 𝐸0 = −
𝐺𝑀𝑚
2𝑟0
Energi sistem setelah debu menempel (𝑀 menjadi 2𝑀)
𝐸 =1
2𝑚𝑣0
2 −𝐺 2𝑀 𝑚
𝑟0⟹ 𝐸 = −
3𝐺𝑀𝑚
2𝑟0
Sehingga
𝐸
𝐸0= 3
b. Jika planet 𝑀 massanya menjadi 2𝑀 persamaan (1) menjadi tidak terpenuhi dan
karena total energi lebih kecil dari nol, artinya orbit planet 𝑚 berupa loop tertutup,
maka orbit sistem yang mungkin adalah elips.
c. Energi total orbit elips ini adalah 𝐸, dari konservasi energi diperoleh
𝐸 = −3𝐺𝑀𝑚
2𝑟0= −
2𝐺𝑀𝑚
𝑟+
1
2𝑚 𝑟 2 + 𝑟2𝜃 2
Saat planet 𝑚 di robit terjauh atau terdekatnya dengan planet 𝑀, dia tidak memiliki
kecepatan radial (𝑟 = 0). Dengan menggunakan 𝐿 = 𝑚𝑟𝜃 akan didapat

Sainskan Dunia dengan Tanganmu Email : [email protected] ID Line : mr_sainsworld Contact Person : 0895701002686
3𝐺𝑀𝑚
2𝑟0−
2𝐺𝑀𝑚
𝑟+
𝐿2
2𝑚𝑟2= 0
Momentum angular planet 𝑚 kekal sehingga 𝐿 = 𝑚𝑣0𝑟0
3𝐺𝑀𝑚
2𝑟0−
2𝐺𝑀𝑚
𝑟+
𝑚𝑣02𝑟0
2
2𝑟2= 0
3𝑟2 − 4𝑟0𝑟 + 𝑟02 = 0
Sehingga
𝑟min =1
3𝑟0 dan 𝑟max = 𝑟0
d. Misal panjang sumbu minor dan mayor adalah 2𝑏 dan 2𝑎 serta jarak pusat elips dari
fokusnya adalah 𝑐, maka
𝑎 =1
2 𝑟max + 𝑟min =
2
3𝑟0
𝑐 =1
2 𝑟max − 𝑟min =
1
3𝑟0
𝑏 = 𝑎2 − 𝑐2 =1
3 3𝑟0
Atau
2𝑎 =4
3𝑟0
2𝑏 =2
3 3𝑟0
e. Hasil bagian (c) dan 𝑑 tidak dipengaruhi oleh 𝑀 dan 𝑚 sehingga akan tetap
seperti yang didapat sebelumnya.

Sainskan Dunia dengan Tanganmu Email : [email protected] ID Line : mr_sainsworld Contact Person : 0895701002686
5. Sainsworld adalah suatu dunia impian dimana sains menjadi hal penting bagi
penduduknya. Untuk menghindari pengaruh kehidupan di permukaan bumi yang
semakin waktu semakin buruk, dunia baru ini dibuat melayang di atas permukaan bumi
menggunakan sistem gaya tolak magnet. Namun medan magnet bumi tidak cukup kuat
memberikan gaya tolak untuk membuat dunia ini melayang. Para ilmuwan pun membuat
sautu kumparan raksasa berjari-jari 𝑅 di permukaan bumi yang terdiri dari 𝑁2 lilitan
namun kumparan ini masih bisa dianggap sebagai satu lingkaran saja (luas penampang
kawat cukup kecil dibanadingkan jari-jarinya). Sainsworld berada di atas sebuah cakram
berjari-jari 𝑟. Dipinggir cakram ini dipasang suatu kawat yang cukup besar sepanjang
kelilingnya sebanyak 𝑁1 lilitan. Massa total sainsworld dan segala isinya serta merta
cakram dan kawat yang melilitnya adalah 𝑀. Untuk memberikan kenyamanan pada
penduduknya, sainsworld dibuat melayang pada ketinggian ℎ yang tidak terlalu besar
dari permukaan bumi. Sebelumnya para ilmuwan sudah membuktikan bahwa bumi
berbentuk bola dengan massa 𝑀𝐸 dan jari-jari 𝑅𝐸 . Asumsikan ukuran sainsworld dan
kumparan kawat di permukaan bumi cukup kecil dibandingkan ukuran bumi. Asumsikan
jari-jari cakram jauh lebih kecil dibandingkan jari-jari kumparan di permukaan.
a. Pembangkit energi utama di sainsworld adalah dari panel surya, angin, dan nuklir.
Seluruh sumber energi ini menghasilkan daya sebesar 𝑃0 yang sedemikian rupa bisa
dibuat konstan sepanjang masa. Sejumlah 20% dari total energi ini digunakan untuk
menghasilkan arus pada kawat yang melingkari cakram sainsworld. Hambatan total
kawat ini adalah 𝑅0. Tentukan besar arus yang mengalir pada kawat (𝐼1)!
𝑆𝑎𝑖𝑛𝑠𝑤𝑜𝑟𝑙𝑑
ℎ
𝑅
𝑟
permukaan bumi

Sainskan Dunia dengan Tanganmu Email : [email protected] ID Line : mr_sainsworld Contact Person : 0895701002686
b. Misalkan besar arus pada kumparan di permukaan bumi adalah 𝐼2, tentukan besar
medan magnet pada suatu titik yang berjarak ℎ dari pusat massa kumparan
sepanjang sumbu yang melalui pusat massanya! Dilihat dari atas bumi, arus 𝐼2
mengalir searah jarum jam.
c. Berapakah medan magnet pada suatu titik di pinggir cakram sainsworld sebagai
fungsi ℎ!
d. Agar sainworld dapat melayang, berapakah besar arus 𝐼2 yang harus diberikan pada
kumparan di permukaan bumi!
e. Suatu ketika, meteor jatuh menuju bumi namun para ilmuwan berhasil
menghancurkannya sebelum menumbuk bumi. Akan tetapi efek pengahancuran
meteor ini menyebabkan sainsworld tersimpang dari posisi kesetimbangannya. Agar
penduduk tetap aman, sainsworld tidak boleh memiliki percepatan yang lebih besar
dari 5𝑔. Untuk mengantisipasi hal ini para ilmuwan membuat suatu peredam
sehingga sainsworld hanya bisa tersimpang maksimal sejauh 𝑦m dari posisi
kesetimbangannya. Berapakah nilai 𝑦m agar penduduk tetap aman!
Solusi
a. Hubungan daya, arus, dan hambatan
𝑃 = 𝐼12𝑅0 sehingga 𝐼1 =
𝑃0
5𝑅0
b. Dengan Hukum Biot Savart akan diperoleh
𝐵 2 =𝜇0𝑁2𝐼2𝑅
2
2 𝑅2 + ℎ2 3/2𝑦
c. Dari ketiadaan monopol magnet memberikan
𝑑ℎ 𝐵𝑟 𝐵𝑟 𝐵𝑟
𝐵𝑟
𝐵2 ℎ
𝐵2 ℎ + 𝑑ℎ
𝑟

Sainskan Dunia dengan Tanganmu Email : [email protected] ID Line : mr_sainsworld Contact Person : 0895701002686
𝐵 ∙ 𝑑𝐴 = 0
𝜋𝑟2𝐵2 ℎ + 𝑑ℎ − 𝜋𝑟2𝐵2 ℎ + 2𝜋𝑟𝑑ℎ𝐵𝑟 = 0
𝜋𝑟2 𝐵2 ℎ + 𝑑ℎ − 𝐵2 ℎ + 2𝜋𝑟𝑑ℎ𝐵𝑟 = 0
𝜋𝑟2𝑑𝐵2 + 2𝜋𝑟𝑑ℎ𝐵𝑟 = 0
𝐵𝑟 = −𝑟
2
𝑑𝐵2
𝑑ℎ= −
𝑟
2
𝑑
𝑑ℎ
𝜇0𝑁2𝐼2𝑅2
2 ℎ2 + 𝑅2 3/2
𝐵𝑟 = −𝜇0𝑁2𝐼2𝑅
2𝑟
2 −
3
2
2ℎ
2 ℎ2 + 𝑅2 5/2
𝐵𝑟 =3𝜇0𝑁2𝐼2𝑅
2𝑟ℎ
4 ℎ2 + 𝑅2 5/2
d. Agar dapat melayang, resultan gaya yang bekerja padanya harus sama dengan nol
pada arah vertikal
𝐹𝑦 = 0
𝑑𝐹𝐿 −𝐺𝑀𝐸𝑀
𝑅𝐸 + ℎ 2= 0
3𝜇0𝑁1𝑁2𝐼1𝐼2𝑅2𝑟2ℎ
4 ℎ2 + 𝑅2 5/2 𝑑𝜃
2𝜋
0
−𝐺𝑀𝐸𝑀
𝑅𝐸 + ℎ 2= 0
Atau
𝐼2 =2𝐺𝑀𝐸𝑀 ℎ2 + 𝑅2 5/2
3𝜋𝑁1𝑁2𝑅2𝑟2ℎ 𝑅𝐸 + ℎ 2
5𝑅0
𝑃0
e. Jika sainsworld tersimpang sejauh 𝑦 dari kesetimbangannya
3𝜋𝑁1𝑁2𝐼1𝐼2𝑅2𝑟2 ℎ + 𝑦
2 ℎ + 𝑦 2+ 𝑅2
5/2−
𝐺𝑀𝐸𝑀
𝑅𝐸 + ℎ + 𝑦 2
= 𝑀𝑦
Untuk simpangan 𝑦 yang kecil bisa dilakukan pendekatan
3𝜋𝑁1𝑁2𝐼1𝐼2𝑅2𝑟2ℎ
2 ℎ2 + 𝑅2 5/2−
𝐺𝑀𝐸𝑀
𝑅𝐸 + ℎ 2 0
−3𝜋𝑁1𝑁2𝐼1𝐼2𝑅
2𝑟2 4ℎ2 − 𝑅2
2 ℎ2 + 𝑅2 7/2𝑦 +
2𝐺𝑀𝐸𝑀
𝑅𝐸 + ℎ 3𝑦 = 𝑀𝑦
𝑦 + 3𝜋𝑁1𝑁2𝐼1𝐼2𝑅
2𝑟2 4ℎ2 − 𝑅2
2𝑀 ℎ2 + 𝑅2 7/2−
2𝐺𝑀𝐸
𝑅𝐸 + ℎ 3 𝑦 = 0
Frekuensi sudut osilasi sistem
𝜔2 =3𝜋𝑁1𝑁2𝐼1𝐼2𝑅
2𝑟2 4ℎ2 − 𝑅2
2𝑀 ℎ2 + 𝑅2 7/2−
2𝐺𝑀𝐸
𝑅𝐸 + ℎ 3
Sainskan Dunia dengan Tanganmu Email : [email protected] ID Line : mr_sainsworld Contact Person : 0895701002686
Maka
𝑎maks = 𝜔2𝑦𝑚 = 5𝑔
atau
𝑦𝑚 =5𝑔
3𝜋𝐼1𝐼2𝑅2𝑟2 4ℎ2 − 𝑅2
2𝑀 ℎ2 + 𝑅2 7/2 −2𝐺𝑀𝐸
𝑅𝐸 + ℎ 3