
PUNGKI SKD.doc
8
DC MOTOR CONTROL USING ROUND FUZZY LOGIC BASED MICROCONTROLLER 8031 Oleh: Resmana A !"s S"#$% &'( a!(% (an Ma#sel'n% S"(a#)% *"#"san Te+n'+ Ele+)#% Un',e#s')as -#'s)en .e)#a S'/alan+e#)% 11131 S"#a2a$a In(%nes'a Te lp : (031) 8439040, fax : (031) 8436418 Ema'l : #esmana45e)#a6a76'( Abstract This paper descr ibes the devel opme t of a f!""# lo$ic cotr ol o cotr olli$ dc motor rotatio is implemeted o a 8%bit microcotroller &tel's 8031 The pro$ram has bee set !p f!""# lo$ic ro!tie i assembl# l a$!a$e !""# lo$ic cotrol here has t*o ip!ts that cha$e the speed error si$al ad error, ad has a o!tp!t that is a cha$e i the volta$e applied to the dc motor driver +oth ip!t ad o!tp!t has five labels i its membership f!ctio, ad - f!""# if%the r!les are !sed i this s#stem The desi$ of membership f!ctios ad f!""# r!les, here !si$ a approach of the cotrol s#stem performace berfeedbac. /river dc motor !si$ p!lse *idth mod!latio techi!e (2), ad the feedbac. si$al obtaied from the optical ecoder si$als are co!pled to a dc motor shaft otrol respose $eerated b# setti$%poit step f!ctio *ith load variatios imposed o the motor shaft ad the removal of some of the f!""# r!les also performed 5esposes ca cotrol o!tp!t to follo* a $ive load variatios, as *ell as the removal of some f!""# r!les, do ot ma.e the s#stem si$ificatl# de$raded This sho*s that the f!""# cotrol is !ite tolera t of erro rs, ad sho* the pheo meo of red!dat &mplem etatio of f!""# cotrol i m!lti%f!ctio microcotroller is reasoabl# priced ad does ot re!ire special f!""# processors The !se of !""# o$i c cotrol techi!es have bee !ite *idespread i a variet# of applicatios ra$i$ from id !strial pro cess co trol, ho! sehold electroics, robot cotrol ad others 71 & this paper , $iv e a exa mple of a simple applicatio !si$ f!""# cotrol, the dc motor cot rol s# stem !""# cotro l is relativel# eas# ad flexible desi $e d, *it h ot iv olv e comple x mathematical model of the s#stem to be cotrolled /c motor cotrol is here !sed as a potter#%ma.i$ machie pla#er 5o!d co trolle d *it hi the ra$e of 0% 00 rpm *ith loadi$ the ra* material of potter# aro!d 3%- .$ etti$%poit ro!ds are $i ve *i th the help of pedals, there are t*o pedals here respectivel# for meabah ad red!ce the setti$%poit The desi$ of f!""# cotrol based o the performace of baited cotrol bac. i $e eral f the co trol respose is extract ed memb ership f!ctio ad f!""# if%the r!le her The s#ste m *as tested *ith a set%poit $ave the variatio ad variable loadi$ 5emoval of some f!""# r!les is also doe b# observi$ the effect o the o!tp!t respos e The res!lts sho* the cotrol respose f!""# lo$ic cotrol ca follo* load variatios as *ell as the removal of some cotrol r!l e doe s ot res!lt i si$if ica t de$radatio
-
Upload
pungky-fajar -
Category
Documents
-
view
228 -
download
0
Transcript of PUNGKI SKD.doc

8/10/2019 PUNGKI SKD.doc
http://slidepdf.com/reader/full/pungki-skddoc 1/8
DC MOTOR CONTROL USING ROUND
FUZZY LOGIC BASED MICROCONTROLLER 8031Oleh:
Resmana A!"s S"#$% &'(a!(% (an Ma#sel'n% S"(a#)%
*"#"san Te+n'+ Ele+)#%Un',e#s')as -#'s)en .e)#a
S'/alan+e#)% 11131 S"#a2a$a In(%nes'a
Telp : (031) 8439040, fax : (031) 8436418Ema'l :
#esmana45e)#a6a76'(
Abstract
This paper describes the developmet of a f!""# lo$ic cotrol o cotrolli$ dc
motor rotatio is implemeted o a 8%bit microcotroller &tel's 8031 The pro$ram has
bee set !p f!""# lo$ic ro!tie i assembl# la$!a$e !""# lo$ic cotrol here has t*oip!ts that cha$e the speed error si$al ad error, ad has a o!tp!t that is a cha$e i
the volta$e applied to the dc motor driver +oth ip!t ad o!tp!t has five labels i its
membership f!ctio, ad - f!""# if%the r!les are !sed i this s#stem The desi$ of
membership f!ctios ad f!""# r!les, here !si$ a approach of the cotrol s#stem
performace berfeedbac.
/river dc motor !si$ p!lse *idth mod!latio techi!e (2), ad the feedbac.
si$al obtaied from the optical ecoder si$als are co!pled to a dc motor shaft otrol
respose $eerated b# setti$%poit step f!ctio *ith load variatios imposed o the
motor shaft ad the removal of some of the f!""# r!les also performed 5esposes ca
cotrol o!tp!t to follo* a $ive load variatios, as *ell as the removal of some f!""#
r!les, do ot ma.e the s#stem si$ificatl# de$raded This sho*s that the f!""# cotrol
is !ite tolerat of errors, ad sho* the pheomeo of red!dat &mplemetatio of f!""# cotrol i m!lti%f!ctio microcotroller is reasoabl# priced ad does ot re!ire
special f!""# processors
The !se of !""# o$ic cotrol
techi!es have bee !ite *idespread
i a variet# of applicatios ra$i$ from
id!strial process cotrol, ho!sehold
electroics, robot cotrol ad others 71
& this paper, $ive a example of asimple applicatio !si$ f!""# cotrol,
the dc motor cotrol s#stem !""#
cotrol is relativel# eas# ad flexible
desi$ed, *ith ot ivolve complex
mathematical model of the s#stem to be
cotrolled
/c motor cotrol is here !sed as a
potter#%ma.i$ machie pla#er 5o!d
cotrolled *ithi the ra$e of 0%00
rpm *ith loadi$ the ra* material of
potter# aro!d 3%- .$ etti$%poit
ro!ds are $ive *ith the help of
pedals, there are t*o pedals here
respectivel# for meabah ad red!ce the
setti$%poit
The desi$ of f!""# cotrol based o
the performace of baited cotrol bac.
i $eeral f the cotrol respose is
extracted membership f!ctio adf!""# if%the r!le her The s#stem *as
tested *ith a set%poit $ave the variatio
ad variable loadi$ 5emoval of some
f!""# r!les is also doe b# observi$
the effect o the o!tp!t respose The
res!lts sho* the cotrol respose f!""#
lo$ic cotrol ca follo* load variatios
as *ell as the removal of some cotrol
r!le does ot res!lt i si$ificat
de$radatio
8/10/2019 PUNGKI SKD.doc
http://slidepdf.com/reader/full/pungki-skddoc 2/8
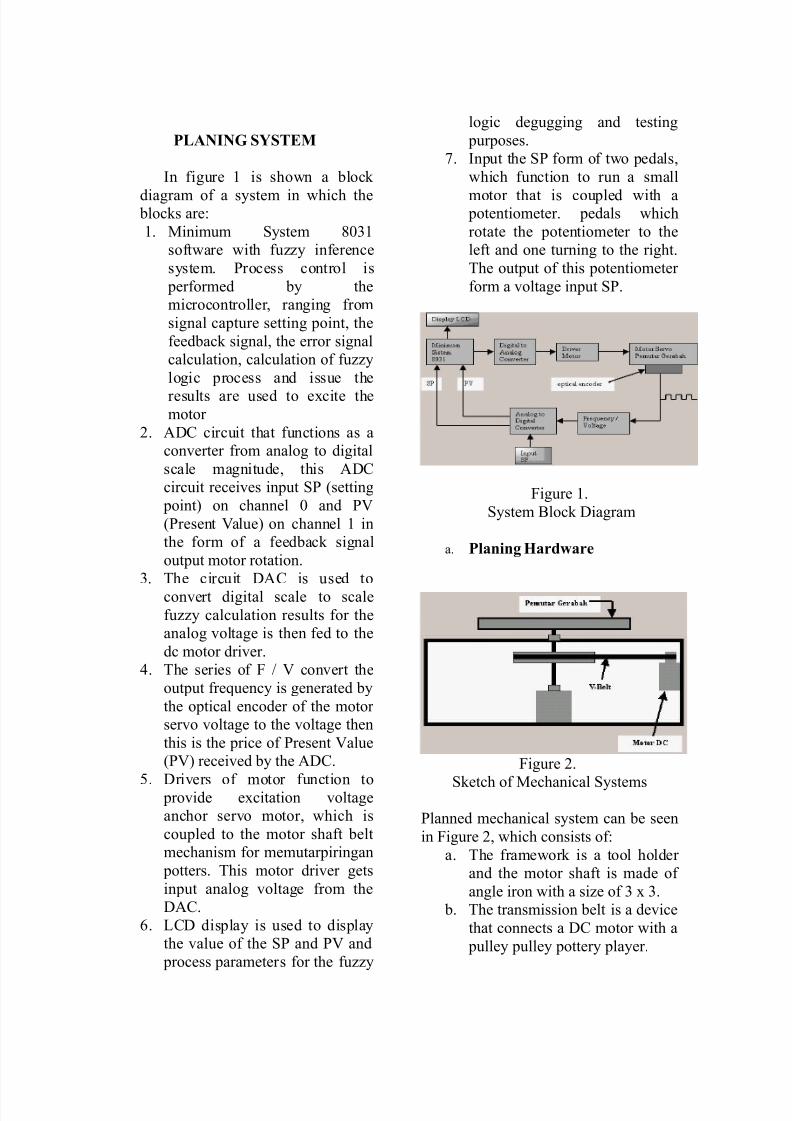
.LANING SYSTEM
& fi$!re 1 is sho* a bloc.
dia$ram of a s#stem i *hich the bloc.s are:
1 iim!m #stem 8031
soft*are *ith f!""# iferece
s#stem rocess cotrol is
performed b# the
microcotroller, ra$i$ from
si$al capt!re setti$ poit, the
feedbac. si$al, the error si$al
calc!latio, calc!latio of f!""#
lo$ic process ad iss!e the
res!lts are !sed to excite themotor
A/ circ!it that f!ctios as a
coverter from aalo$ to di$ital
scale ma$it!de, this A/
circ!it receives ip!t (setti$
poit) o chael 0 ad ;
(reset ;al!e) o chael 1 i
the form of a feedbac. si$al
o!tp!t motor rotatio
3 The circ!it /A is !sed to
covert di$ital scale to scale
f!""# calc!latio res!lts for the
aalo$ volta$e is the fed to the
dc motor driver
4 The series of < ; covert the
o!tp!t fre!ec# is $eerated b#
the optical ecoder of the motor
servo volta$e to the volta$e the
this is the price of reset ;al!e
(;) received b# the A/
- /rivers of motor f!ctio to provide excitatio volta$e
achor servo motor, *hich is
co!pled to the motor shaft belt
mechaism for mem!tarpiri$a
potters This motor driver $ets
ip!t aalo$ volta$e from the
/A
6 / displa# is !sed to displa#
the val!e of the ad ; ad
process parameters for the f!""#
lo$ic de$!$$i$ ad testi$
p!rposes
= &p!t the form of t*o pedals,
*hich f!ctio to r! a small
motor that is co!pled *ith a potetiometer pedals *hich
rotate the potetiometer to the
left ad oe t!ri$ to the ri$ht
The o!tp!t of this potetiometer
form a volta$e ip!t
i$!re 1
#stem +loc. /ia$ram
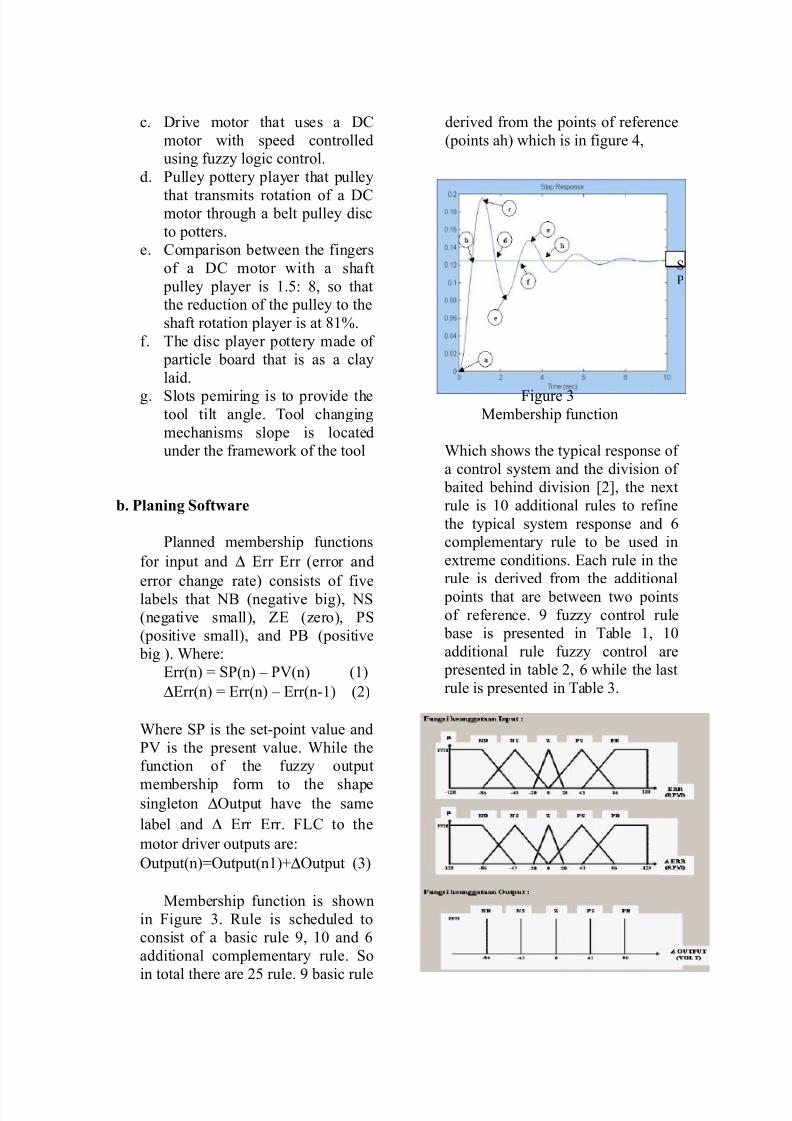
a .lan'n! a#(/a#e
i$!re
.etch of echaical #stems
laed mechaical s#stem ca be see
i i$!re , *hich cosists of:
a The frame*or. is a tool holder
ad the motor shaft is made of
a$le iro *ith a si"e of 3 x 3
b The trasmissio belt is a device
that coects a / motor *ith a
p!lle# p!lle# potter# pla#er
8/10/2019 PUNGKI SKD.doc
http://slidepdf.com/reader/full/pungki-skddoc 3/8
c /rive motor that !ses a /
motor *ith speed cotrolled
!si$ f!""# lo$ic cotrol
d !lle# potter# pla#er that p!lle#
that trasmits rotatio of a /motor thro!$h a belt p!lle# disc
to potters
e ompariso bet*ee the fi$ers
of a / motor *ith a shaft
p!lle# pla#er is 1-: 8, so that
the red!ctio of the p!lle# to the
shaft rotatio pla#er is at 81>
f The disc pla#er potter# made of
particle board that is as a cla#
laid
$ lots pemiri$ is to provide thetool tilt a$le Tool cha$i$
mechaisms slope is located
!der the frame*or. of the tool
26 .lan'n! S%9)/a#e
laed membership f!ctios
for ip!t ad ∆ ?rr ?rr (error ad
error cha$e rate) cosists of five
labels that @+ (e$ative bi$), @
(e$ative small), ? ("ero),
(positive small), ad + (positive
bi$ ) 2here:
?rr() B () C ;() (1)
∆?rr() B ?rr() C ?rr(%1) ()
2here is the set%poit val!e ad
; is the preset val!e 2hile the
f!ctio of the f!""# o!tp!t
membership form to the shapesi$leto ∆!tp!t have the same
label ad ∆ ?rr ?rr to the
motor driver o!tp!ts are:
!tp!t()B!tp!t(1)D∆!tp!t (3)
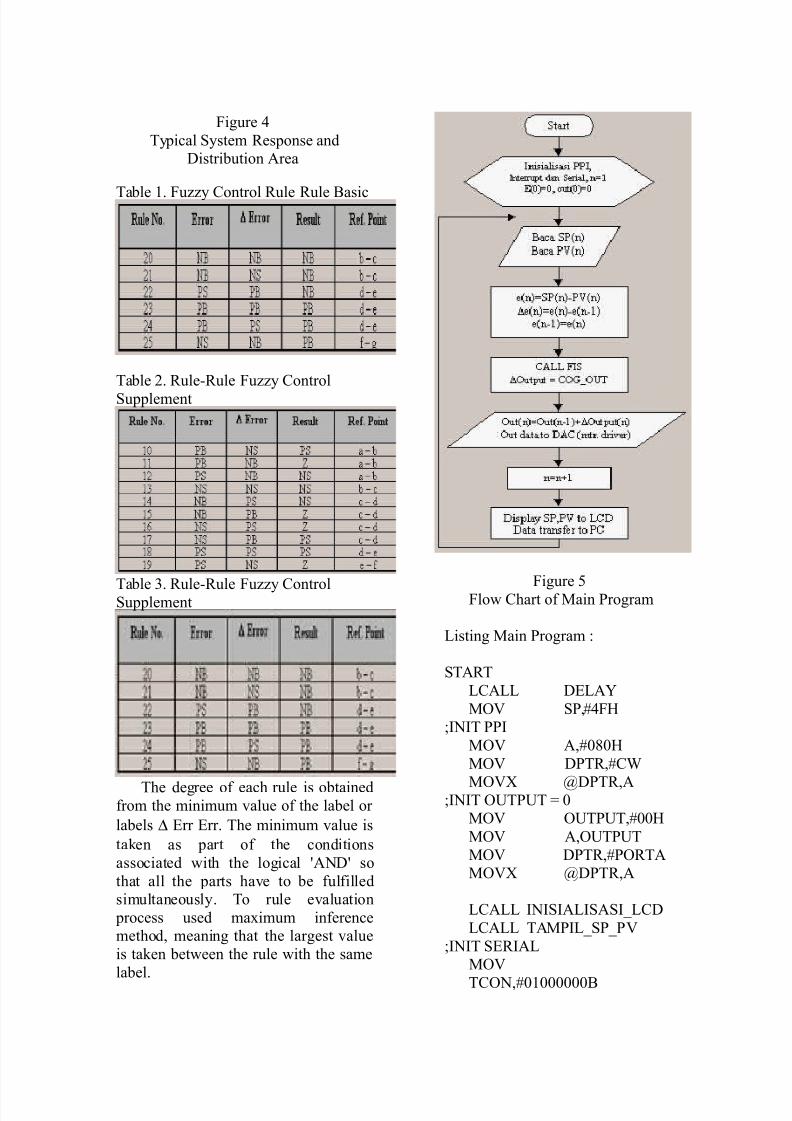
embership f!ctio is sho*
i i$!re 3 5!le is sched!led to
cosist of a basic r!le 9, 10 ad 6
additioal complemetar# r!le o
i total there are - r!le 9 basic r!le
derived from the poits of referece
(poits ah) *hich is i fi$!re 4,
i$!re 3embership f!ctio
2hich sho*s the t#pical respose of
a cotrol s#stem ad the divisio of
baited behid divisio 7, the ext
r!le is 10 additioal r!les to refie
the t#pical s#stem respose ad 6
complemetar# r!le to be !sed i
extreme coditios ?ach r!le i the
r!le is derived from the additioal
poits that are bet*ee t*o poits
of referece 9 f!""# cotrol r!le
base is preseted i Table 1, 10
additioal r!le f!""# cotrol are
preseted i table , 6 *hile the last
r!le is preseted i Table 3
8/10/2019 PUNGKI SKD.doc
http://slidepdf.com/reader/full/pungki-skddoc 4/8
i$!re 4
T#pical #stem 5espose ad
/istrib!tio Area
Table 1 !""# otrol 5!le 5!le +asic
Table 5!le%5!le !""# otrol
!pplemet
Table 3 5!le%5!le !""# otrol!pplemet
The de$ree of each r!le is obtaiedfrom the miim!m val!e of the label or
labels ∆ ?rr ?rr The miim!m val!e is
ta.e as part of the coditios
associated *ith the lo$ical 'A@/' so
that all the parts have to be f!lfilled
sim!ltaeo!sl# To r!le eval!atio
process !sed maxim!m iferece
method, meai$ that the lar$est val!e
is ta.e bet*ee the r!le *ith the same
label
i$!re -lo* hart of ai ro$ram
isti$ ai ro$ram :
TA5T
A /?AE
; ,F4G
H&@&T &
; A,F080G
; /T5,F2
;I J/T5,AH&@&T KTKT B 0
; KTKT,F00G
; A,KTKT
; /T5,F5TA
;I J/T5,A
A &@&&A&A&L/
A TA&LL;
H&@&T ?5&A
;
T@,F01000000+
8/10/2019 PUNGKI SKD.doc
http://slidepdf.com/reader/full/pungki-skddoc 5/8
;
T/,F00100010+
; @,F00G
; TG1,F0/G
; T1,F0/G
;
@,F01000000+
H&@&T &@T0
?T+ &T0
?T+ ?A
?T+ ?I0
H &@&T TA& A@/ ;
; @T5,F00G
; A,F00G
; /T5,FA/L ;I J/T5,A
KA@M
A
K@TL?55L/?55
HKE &@?5?@? ET?
A &
A KT/ATA
A TA&L5
A /?AE
H ?@/ /ATA ANK&&T&@
A @@?T&@
O KA@M
Gere the process is doe b# the
!""# &ferece #stem !""# Perel
etra!" & process icl!des
f!""ificatio, r!le eval!atio, ad
def!""ificatio !""# Perel b!ilt i
assembl# la$!a$e for microcotroller
-1 famil#
Gere the a!thors *ated to test the
s#stem respose to the load variatio
ad variatios i Testi$ *as also
doe b# providi$ iterferece from
o!tside i the form of additioal frictio
ad icrease load s!ddel# The tests
*ere cod!cted as follo*s:
1) The s#stem *ith r!le !mber -
pieces:
a +!rde o pla#ers earthe*are
dish at 10 P$ ad are set at a
speed of 00 5
b +!rde o pla#ers earthe*are
dish at 10 P$ ad alteredc +!rde o pla#ers earthe*are
dish at - P$ ad the added
aother - P$
) #stem b# red!ci$ the !mber of
r!les to 19 pieces:
a +!rde o pla#ers earthe*are
dish at 10 P$ ad are set at a
speed of 00 5
b +!rde o pla#ers earthe*are
dish at 10 P$ ad altered
(raisi$ ad decreasi$)c +!rde o pla#ers earthe*are
dish at - P$ ad the added
aother - P$
The s#stem respose is the
displa#ed o a comp!ter scree *ith the
help of data facilities A!ititio
cotaied o etra!" pro$ram
etra!" pro$ram receives data from
the s#stem respose s#stem 8031
microcotroller is set seriall# i$!re
6 sho*s etra!" ro$ram
i$!re 6 etra!" pro$ram
a6 Res5%nse S$s)em /')h #"le
#stem respods to fixed poit
setti$, sho* i i$!re = The
!mber of r!les that are !sed -,
*hich is 9 basic r!le, 10 additioal
8/10/2019 PUNGKI SKD.doc
http://slidepdf.com/reader/full/pungki-skddoc 6/8
r!le ad complemetar# r!le 6 *ith
a load of 10 .$
i$!re =
#stem 5espose to etti$ oit
ixed
rom the fi$!re it ca be see that
the respose time of the s#stem has
a ver# fast rise time of
approximatel# 3%4 secods to shoot
over approximatel# -%10 5
tead# tate ?rror respose of the
s#stem is also ver# small D 1 5
i$!re 13 sho*s the s#stem
respose to variatios i setti$
poit etti$ poit cha$e from 00
5 the lo*ered to 1-0 5, 1005, ad the last -0 5 &
cotrast to the 14 ima$es sho*
boosts the s#stem respods to
etti$ oit
i$!re 8
#stem 5espose to ;ariatio ,
The load 10 P$
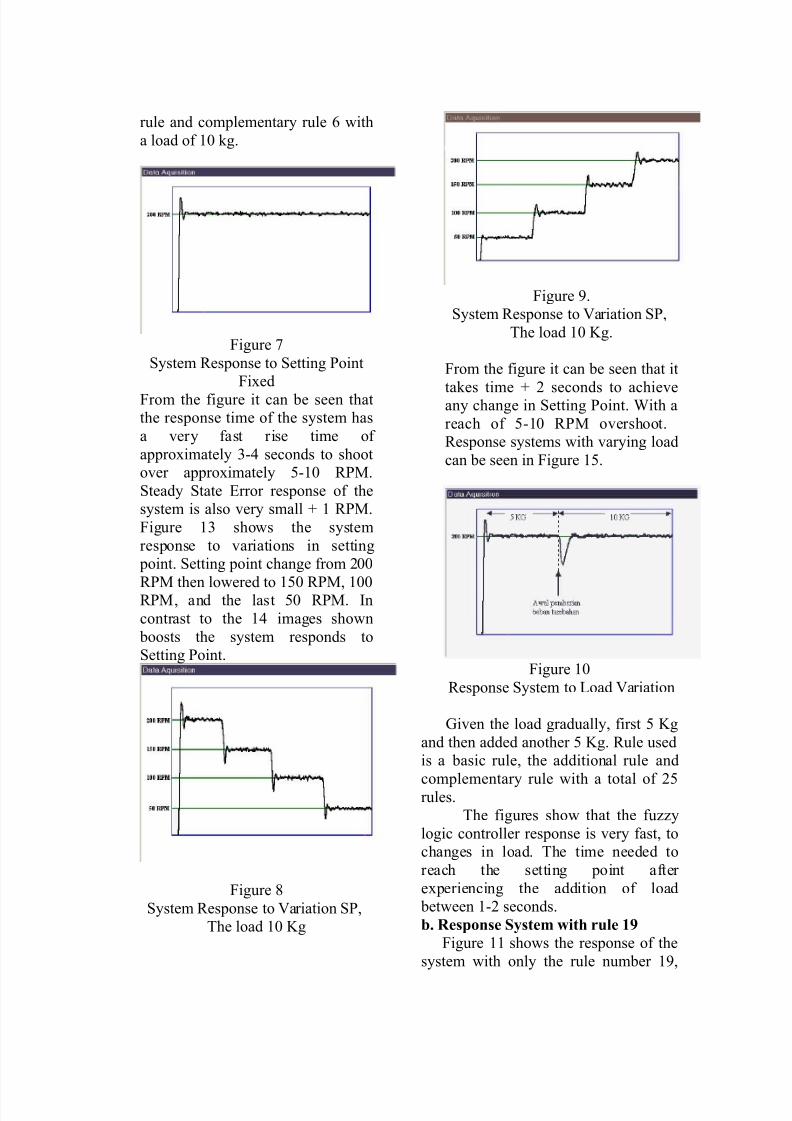
i$!re 9
#stem 5espose to ;ariatio ,
The load 10 P$
rom the fi$!re it ca be see that it
ta.es time D secods to achievea# cha$e i etti$ oit 2ith a
reach of -%10 5 overshoot
5espose s#stems *ith var#i$ load
ca be see i i$!re 1-
i$!re 10
5espose #stem to oad ;ariatio
Mive the load $rad!all#, first - P$
ad the added aother - P$ 5!le !sed
is a basic r!le, the additioal r!le ad
complemetar# r!le *ith a total of -r!les
The fi$!res sho* that the f!""#
lo$ic cotroller respose is ver# fast, to
cha$es i load The time eeded to
reach the setti$ poit after
experieci$ the additio of load
bet*ee 1% secods
26 Res5%nse S$s)em /')h #"le 1;
i$!re 11 sho*s the respose of the
s#stem *ith ol# the r!le !mber 19,
8/10/2019 PUNGKI SKD.doc
http://slidepdf.com/reader/full/pungki-skddoc 7/8
this r!le is the basic r!les < basic pl!s a
additioal r!le oad !sed 10 P$
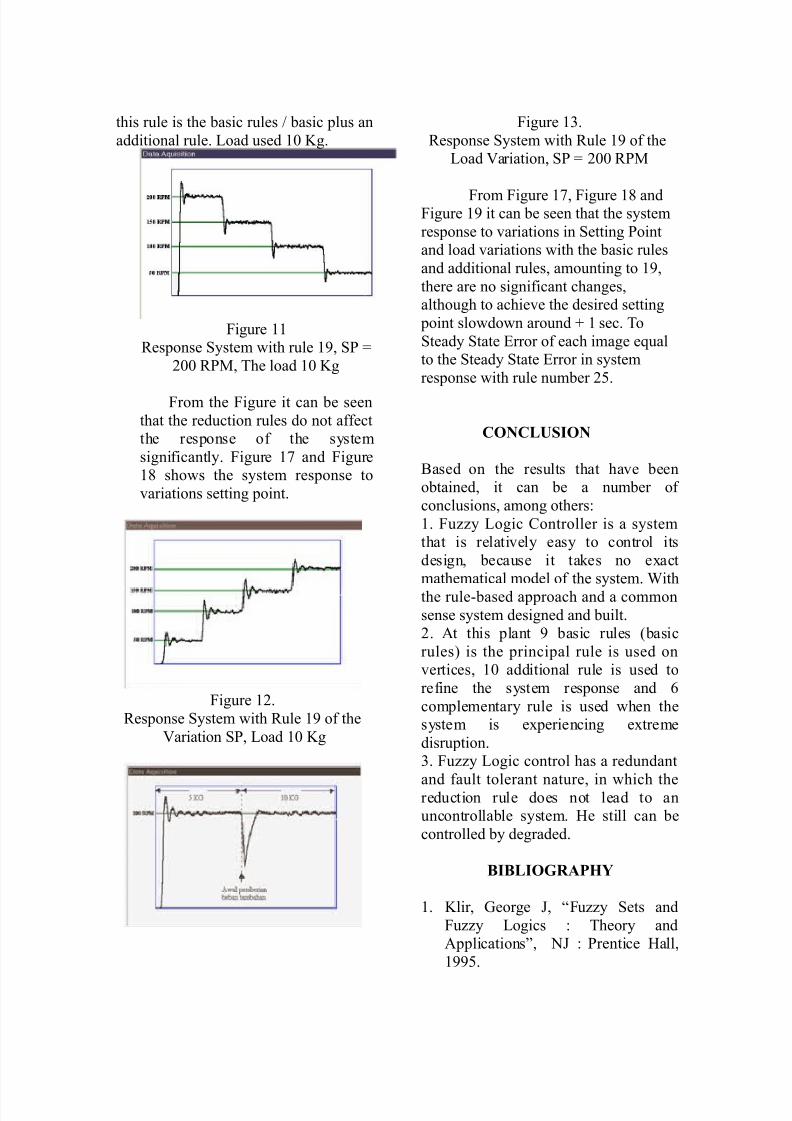
i$!re 11
5espose #stem *ith r!le 19, B
00 5, The load 10 P$
rom the i$!re it ca be see
that the red!ctio r!les do ot affect
the respose of the s#stem
si$ificatl# i$!re 1= ad i$!re
18 sho*s the s#stem respose to
variatios setti$ poit
i$!re 1
5espose #stem *ith 5!le 19 of the
;ariatio , oad 10 P$
i$!re 13
5espose #stem *ith 5!le 19 of the
oad ;ariatio, B 00 5
rom i$!re 1=, i$!re 18 adi$!re 19 it ca be see that the s#stem
respose to variatios i etti$ oit
ad load variatios *ith the basic r!les
ad additioal r!les, amo!ti$ to 19,
there are o si$ificat cha$es,
altho!$h to achieve the desired setti$
poit slo*do* aro!d D 1 sec To
tead# tate ?rror of each ima$e e!al
to the tead# tate ?rror i s#stem
respose *ith r!le !mber -
CONCLUSION
+ased o the res!lts that have bee
obtaied, it ca be a !mber of
cocl!sios, amo$ others:
1 !""# o$ic otroller is a s#stem
that is relativel# eas# to cotrol its
desi$, beca!se it ta.es o exact
mathematical model of the s#stem 2ith
the r!le%based approach ad a commo
sese s#stem desi$ed ad b!ilt
At this plat 9 basic r!les (basic
r!les) is the pricipal r!le is !sed o
vertices, 10 additioal r!le is !sed to
refie the s#stem respose ad 6
complemetar# r!le is !sed *he the
s#stem is experieci$ extreme
disr!ptio
3 !""# o$ic cotrol has a red!dat
ad fa!lt tolerat at!re, i *hich thered!ctio r!le does ot lead to a
!cotrollable s#stem Ge still ca be
cotrolled b# de$raded
BIBLIOGRA.Y
1 Plir, Meor$e O, Q!""# ets ad
!""# o$ics : Theor# ad
ApplicatiosR, @O : retice Gall,
199-

8/10/2019 PUNGKI SKD.doc
http://slidepdf.com/reader/full/pungki-skddoc 8/8
2a$, a!l S /ai, Oi$, Q/esi$
of !""# otroller Accordi$ to
the arameters of A eedbac.
#stemR, Techical 5eport
?lectrical ?$ieeri$ /epartmet,/!.e Kiversit#, 1994
3. Thia$, Gaa*ati, A, ad 5esmaa
"Petrafuz : Sistem Pengembangan
Kendali Fuzzy Logic berbasis
Mikrokontroler Keluarga MCS51" ,
rosidi$ emiar @asioal
eerapa Te.olo$i Pedali da
&str!metasi pada ertaia,
+T%Oa.arta .tober, 1998
?5TA@EAA@:
1. Apa it! f!""# lo$ic
2. +a$aimaa cara m$$!a.a
soft*are etra!"-1
3 e$$apa f!""# lo$ic dapat
mela.!.a pe$at!ra terhadap
motor dc
!mber:
http:<<p!slitpetraacid<eportfolio<artef
act<file<do*loadphpfileB14=683










