Pertemuan 1_pengantar_robotika

of 8
-
Upload
muhammad-allien -
Category
Documents
-
view
226 -
download
0
Transcript of Pertemuan 1_pengantar_robotika
-
7/29/2019 Pertemuan 1_pengantar_robotika
1/8
Pengantar RobotikaLine Follower Analog
Membahas pengertian robot secara umum, macam-macam robot mobile /
berodadan konsep robot line follower analog.
2012
www.afterschoolrobotic.web.id
-
7/29/2019 Pertemuan 1_pengantar_robotika
2/8
www.afterschoolrobotic.web.id
Robot
Istilah robot berasal dari bahasa Cekoslowakia.Kata robot berasal dari kosakata
Robota yang berarti kerja cepat. Istilah ini muncul pada tahun 1920 oleh seorang
pengarang sandiwara bernama Karel Capec. Karyanya pada saat itu berjudul Rossums
Universal Robot yang artinya Robot Dunia milik Rossum. Rossum merancang dan
membangun suatu bala tentara yang terdiri dari robot industri yang akhirnya menjadi terlalu
cerdik dan akhirnya menguasai manusia.
Kata Robotics juga berasal dari novel fiksi sains runaround yang ditulis oleh Isaac
Asimov pada tahun 1942. Sedangkan pengertian robot secara tepat adalah system atau alat
yang dapat berperilaku atau meniru perilaku manusia dengan tujuan untuk menggantikan
dan mempermudah kerja/aktifitas manusia.
Untuk dapat diklasifikasikan sebagai robot, mesin harus memiliki tiga macam
kemampuan yaitu:
1) Bisa mendapatkan informasi dari sekelilingnya.
2) Bisa melakukan sesuatu secara fisik seperti bergerak atau memanipulasi objek.
3) Bisa bergerak secara manual, otomatis, dan kendali jarak jauh.
-
7/29/2019 Pertemuan 1_pengantar_robotika
3/8
www.afterschoolrobotic.web.id
Fungsi Robot
Sesuai dengan definisi robot di atas, maka terdapat banyak kegunaan dari robot.
Secara umum kegunaan robot adalah untuk menggantikan kerja manusia yang
membutuhkan ketelitian yang tinggi atau mempunyai resiko yang sangat besar atau bahakn
mengancam keselamatan manusia. Sebagai contoh, seseorang yang bekerja di bagian
welding di sebuah industri assembling kendaraan, akan mempunyai resiko kecelakaan kerja
yang cukup tinggi. Maka untuk mengurangi rtesiko kerja tersebut perlu digunakan robot
yang menggantikan kerja manusia di bidang tersebut, sehingga resiko kecelakaan kerja
dapat dikurangi bahkan dihilangkan.
Ada juga sebagian robot yang sengaja diciptakan untuk menemani manusia di dalam
aktifitasnya. Robot-robot ini dapat disebut robot bermain. Robot ini diciptakn untuk
membantu manusia yang mengalami kesepian diri sehingga dapat mempunyai teman.
Robot-robot yang termasuk jenis ini termasuk antar lain Battle Bots, Robot contesti, Robot
Anjing.
Namun secara garis besar robot dapat diklasifikasikan menjadi beberapa jenis antara lain:
1) Robot industri
2) Robot antariksa
3) Robot transportasi
4) Robot perang
5) Robot kendali jarak jauh
6) Robot kedokteran
7) Robot riset
8) Robot bermain, dll
-
7/29/2019 Pertemuan 1_pengantar_robotika
4/8
www.afterschoolrobotic.web.id
Robot Mobil (Bergerak) yang bisa berpindah tempat.
Robot Mobil atau Mobile Robot adalah konstruksi robot yang ciri khasnya adalah
mempunyai aktuator berupa roda untuk menggerakkan keseluruhan badan robot tersebut,
sehingga robot tersebut dapat melakukan perpindahan posisi dari satu titik ke titik yang lain.
Robot mobil ini sangat disukai bagi orang yang mulai mempelajari robot. Hal ini
karena membuat robot mobil tidak memerlukan kerja fisik yang berat. Untuk dapat
membuat sebuah robot mobile minimal diperlukan pengetahuan tentang mikrokontroler
dan sensor-sensor elektro.
-
7/29/2019 Pertemuan 1_pengantar_robotika
5/8
www.afterschoolrobotic.web.id
Robot Line Follower
Robot line follower adalah sejenis robot mobile beroda yang pada umumnya
menggunakan dua buah roda dan satu buah roda bebas. Robot ini berfungsi sebagai robot
mengikut garis, dimana area lintasan bewarna putih dan garis bewarna hitam.
Robot line follower dibagi menjadi dua bagian, yaitu robot yang dikendalikan secara
analog (non program) dan dikendalikan mikrokontroler (program) :
1. Robot Line Follower Analog
- Menggunakan rangkaian analog.
-Tanpa diprogram.
- Hanya bergerak mengikuti garis.
- Pergerakan mulus bergantung dari
posisi sensor, jenis motor, dan
mekanik lainnya.
2.
Robot Line Follower Mikrokontroler
- Menggunakan mikrokontroler.
- Dapat diprogram sesuai perintah.
- Bisa bergerak memilih garis sesuai
program.
- Berjalan lebih mulus dan cepat karena
diprogram menggunakan kontrol PID.
-
7/29/2019 Pertemuan 1_pengantar_robotika
6/8
www.afterschoolrobotic.web.id
Robot Line Follower Analog
Robot line follower analog adalah sebuah robot yang dikendalikan oleh kontroler
yang berupa rangkaian analog / logic biasa tanpa adanya bantuan mikrokontroler atau
program yang diisikan kedalam kontroler.
Line follower jenis analog adalah yang paling mudah diterapkan untuk belajar
robotika dasar, rangkaian analog / digital, mekanika robot, dan sensorik. Secara umum
robot ini ada beberapa baigan yaitu :
1. Sensor cahaya (led, photo diode) sebagai pendeteksi warna hitam dan putih
2. Kontroler analog (transistor, ic op-amp, dll) untuk mengolah sinyal dari sensor
cahaya menjadi sebuah kebutusan logika yang merepresentasikan garis.
3.
Driver sebagai penggerak motor berdasarkan sinyal yang diberikan kontroler.
4. Motor DC / Dinamo dan roda sebagai aktuator untuk menggerakkan mekanik / bodi
robot secara keseluruhan.
5. Mekanik / Bodi robot sebagai tempat sensor, kontroler, driver, motor dan roda.
-
7/29/2019 Pertemuan 1_pengantar_robotika
7/8
www.afterschoolrobotic.web.id
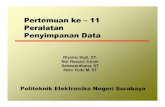
Diagram Blok Line Follower Analog
Secara garis besar diagram robot line follower analog memiliki bagian-bagian dasar
(input-proses-output) adalah sebagai berikut ini :
Penjelasan Blok Diagram :
1. Sensor membaca kondisi lingkungan / lantai apakah bewarna hitam atau putih.
2. Informasi dari sensor yang berupa sinyal tegangan analog sesuai intensitas cahaya
berdasarkan warna dikirimkan ke kontroler untuk diolah.
3. Kontroler mengolah informasi dari sensor untuk menentukan aktifasi driver untuk
mengatur pergerakan motor putar kanan atau kiri.
4. Ketika driver menerima sinyal aktifasi dari kontroler maka driver akan aktif untuk
menggerakkan motor / dinamo.
5. Dinamo tersebut terhubung ke gearbox / puli / sistem transmisi untuk
menggerakkan roda.
6. Dinamo dan roda yang dirakit menjadi satu kesatuan dalam mekanik / bodi robot
bergerak dan menyababkan robot berpindah dari satu tempat ke tempat yang lain,
hingga sesuai kondisi yang diatur pada kontroler.
7. Ketika pergerakan roda telah sesuai maka robot akan bergerak mengikuti kondisi
lingkungan sesuai aturan yang diterapkan pada kontroler.
-
7/29/2019 Pertemuan 1_pengantar_robotika
8/8
www.afterschoolrobotic.web.id
Kesimpulan
1. Suatu benda dapat dikatakan Robot apabila benda tersebut dapat mengambil
informasi / membaca kondisi lingkungan sekitar, dapat melakukan sesuatu secara
fisik, bergerak atau memanipulasi object dan dapat berjalan secara otomatis,
manual, maupun menggunakan remot kontrol.
2. Mobile robot adalah suatu ciri sebuah robot yang penggerak utamanya berupa
roda.
3. Salah satu jenis robot mobile adalah Robot Line Tracer / Line Follower yang
digolongkan menjadi dua bagian yaitu Analog dan Mikrokontroler.
4. Robot Line Follower Analog adalah robot mobile yang berfungsi mengikuti garis
yang bewarna hitam / putih, dengan kendali kontrol analog yaitu menggunakan
rangkaian elektronika dasar.
5. Komponen dasar sebuah robot line follower analog terdiri dari bodi / mekanik
robot, sensor cahaya (led, photo diode), kontroler analog (transistor, ic op-amp,
dll), driver motor, motor dc dan roda.