PERENCANAAN TRA YEKTORI ROBOT UNTUK APLIKASI...
61
PERENCANAAN TRA YEKTORI ROBOT UNTUK APLIKASI PENULISAN HURUF Rse. 89:L kt()' p-1 1095 TUGASAKHIR Disusun oleh : TONNYLEONARD NRP : 2291 100 122 r- JURl.JSAN TEKNIK ELEKTRO FAKULTAS TEKNOLOGI INDUSTRI INSTITUT TEKNOLOGI SEPULUH NOPEMBER SURABAYA 1998
Transcript of PERENCANAAN TRA YEKTORI ROBOT UNTUK APLIKASI...

PERENCANAAN TRA YEKTORI ROBOT
UNTUK APLIKASI PENULISAN HURUF
Rse. 0~9. 89:L kt()' p-1 1095
TUGASAKHIR
Disusun oleh :
TONNYLEONARD NRP : 2291 100 122
r-
JURl.JSAN TEKNIK ELEKTRO FAKULTAS TEKNOLOGI INDUSTRI
INSTITUT TEKNOLOGI SEPULUH NOPEMBER SURABAYA
1998

PERENCANAAN TRA YEKTORI ROBOT
UNTUK APLIKASI PENULISAN HURUF
TUGASAKHIR
Diajukan Guna Memenuhi Sebagian Persyaratan Untuk Memperoleh Gelar Sarjana T eknik Elektro
Pad a Bidang Studi T eknik Sistem Pengaturan
Jurusan Teknik Elektro Fakultas Teknologi lndustri
lnstitut Teknologi Sepuluh Nopember Surabaya
Mengetahui/Menyetujui
DR.Ir. Achmad zidie, M.Eng NIP. 131 647 788
SURABAYA Oktober, 1998

buat keluargaku,
ABSTRAK

ABSTRAK
Salah satu aspek penting dalam pcngendalian scbuah robot adalah pcrencanaan
trayektori, yaitu perencanaan tentang lintasan yang akan dilalui oleh end-<-:f]ector
dalam ruang kerjanya. Perencanaan ini dipakai jika robot diinginkan untuk
melalui banyak posisi dengan menjaga gerakan robot tetap mulus pada saat
melalui posisi-posisi tersebut. Dalam tugas akhir ini diusulkan perencanaan
traycktori untuk pcnulisan scbuah huruf ataupun kata dcngan menambahkan
posisi-posisi yang harus dilewati dalam koordinat Cartesian. Data posisi dipcrolch
dengan membangun sebuah file yang bcrisi posisi-posisi yang harus dilalui end-
efTector. Selanjutnya dalam tugas akhir ini juga dikembangkan sebuah program
untuk mensimulasikan gerakan robot dalam koordinat Cartesian yang membcntuk
tulisan sebuah huruf atau kata, yang pada akhirnya akan diperoleh nilai-nilai sudut '
joint yang sesuai dengan lintasan end-effector yang dinginkan. Untuk
implementasi real time, nilai sudut joint yang diperoleh dijadikan sebagai
refcrcnsi traycktori joint.

The whole earth is my birthplace and all humans are my brothers. (Kahlil Gibran, 1883-1931)
KATAPENGANTAR

KATA PENGANTAR
Puji syukur kami panjatkan kehadirat Tuhan yang Maha Pengasih dan
Penyayang, yang telah melimpahkan rahmat dan petunjukNya, schingga pcnulis
dapat menyelesaikan tugas akhir ini sebagai salah satu syarat memperaleh gclar
satjana Jurusan Teknik Elektro.
Dalarn rnenyusun tugas akhir ini, penulis rnendapat bimbingan serta
bantuan atau saran dari berbagai pihak. Dengan terselesaikannya tugas akhir ini
penulis ingin menyampaikan rasa terima kasih yang scdalam-dalamnya kcpada :
• Bapak Dr. lr. Achmad Jazidie M.Eng., selaku Dasen Pembimbing
dalam penyusunan tugas akhir ini yang telah banyak sekali
memberikan arahan, nasehat, bimbingan dan scmangat kcpada pcnulis.
• Bapak Dr. lr. Mach Rameli , selaku Kaardinator Bidang Studi Teknik
Sistem Pengaturan yang telah banyak memberikan fasilitas kepada
penulis.
• Bapak dan ibu doscn pada Bidang Studi Tcknik Sistcm Pcngaturan
pada khususnya dan Jurusan Teknik Elektro pada umumnya.
• Keluarga besarku, Mami, Papa, Cus Henny & mas Yudi, Yance &
13ibit, Wawan, Pipit, hans dan Emu, yang tclah membcrikan scgalanya
bagi penulis.
• Rckan-rckan di Bidang Studi Tcknik Sistcm Pcngaturan, Ancha,
Jahan, Zul, Kajar, Yusuf, Adi, Wambe, Wiku, Dron, Mak, Endah,
Ill

Gundul, Felix, Yoyok, Sahal, Abed, Okim, Dodo, Lasman, Witwot,
J\tc.:ng, Opk, Yana dll. alas sc.:gala spirit dan dukungannya.
• Rekan-rekan Elektro ITS khususnya E-31 dimanapun bcrada, atas
segala hiburan, dukungan maupun gangguan yang dibcrikan sclama
masa kuliah penulis.
• Rekan-rekan Smalapala, Pay, Aries, Chiang, Eko, Tommy, Catur,
Ponti, Ablch, Joko, Firjik, Azis, Diah, Nur, Ratih dll . yang sclalu
mengingatkan penulis bahwa waktunya telah tiba.
• Friends of mine, Ririn, Alfi , Sonny atas pelajaran yang dilcwati
bersama.
• Christ yang selalu menemani penulis.
• Semua pihak yang membantu terselesaikannya Tugas Akhir ini yang
tidak mungkin untuk disebutkan satu-persatu .
Besar harapan penulis semoga tugas akhir ini bermanfaat bagi para
pembaca pada umumnya serta mahasiswa Teknik Elektro pada khususnya.
Penulis menyadari segala kekurangan yang ada sehingga tugas akhir ini masih
jauh dari kcsempurnaan, olch karcna itu kritik dan saran sclalu pcnulis harapkan.
IV
Surabaya, J\gustus 1998
Pcnulis.

DAFTARISI

DAFTAR lSI
halaman
Abstrak II
Kata pengantar Ill
Daftar isi v
Daftar gambar VIII
BABI
PENDAHULUAN
1.1 Latar belakang
1.2 Rumusan masalah 2
1.3 Batasan masalah I
.... 1.4 Tujuan .)
1.5 Sistematika pembahasan .... .)
BAB II
KINEMATIKA 5
2.1. Kincmatika Instantaneous 5
2.3. Perpindahan Virtual 8
BAB Ill
TRAYEKTORlROBOT 10
3.1 Perencanaan dalam koordinatjoint 10
3.2 Perencanaan dalam koordinat Cartesian II
v

3.3. Kendala-kendala (constraints) dalam perencanaan traycktori II
3.3. 1. Pcrsamaan polinomial ordc tiga (cubic polinomial) 13
3.3.2. Pcrsamaan polinomial ordc lima 16
BABIV
PERENCANAAN TRA YEKTORl UNTUK PENULlSAN HURUF 20
4.1. Pembangkitan batasan-batasan (constraints) posisi 20
4.2. Transformasi koordinat screen ke koordinat Cartesian 21
4.3 . Translasi koordinat untuk pcnulisan huruf
BABY
ANALlSA HASlL SlMULASl 26
5.1. Simulasi pcnulisan huruf ' c' 27
5.2. Simulasi penulisan kata 'elits ' 32
BAB VI
PENUTUP 37
6.1. Kesimpulan 37
6.1 . Saran 37
DAFT AR PUST AKA 39
LAMPlRAN 40
VI

DAFTAR GAMBAR

DAFTAR GAMBAR
halaman
Gambar 2.1 Manipulator planar dengan 2 derajat kcbebasan 6
Gambar 2.2 Perpindahan virtual pada end-effector dan tiap joint 8
Gambar 3.1 Blok diagram pengaturan robot dalam koordinat Cartesian II
Gambar 3.2 Lintasan robot untuk meghindari rintangan 12
Gambar 4 .1. Posisi hasil scanning huruf e relatifterhadap koordinat screen 22
Gam bar 4 .2. Posisi huruf a relatif terhadap koordinat kartesian 23
Gambar 4 .3. Translasi koordinat huruf 24
Gambar 4.4. Translasi dan transisi koordinat huruf 25
Gambar 5.1 Konfigurasi awal robot 26
Gambar 5.2 Posisi referensi pada sumbu koordinat x-y 27
Gambar 5.3 Posisi hasil simulasi pada sumbu koordinat x-y
Gam bar 5.4 Grafik posisi x tcrhadap waktu 29
Gambar 5.5 Grafik posisi x terhadap waktu 30
Gambar 5.6 Grafik posisi sudutjoint tcrhadap waktu 31
Gambar 5.7 Posisi rcferensi pada sumbu koordinat x-y
Gambar 5.8 Posisi hasil simulasi pada sumbu koordinat x-y
Gambar 5.9 Grarik posisi x h.:rhadap waktu 33
Gambar 5. 10 Grafik posisi y tcrhadap waktu 34
Gambar 5.11 Grafik posisi sudut joint terhadap waktu
35
VIII

0. alangkah dalamnya kekayaan, hikmat dan pengetahuan Allah sungguh tak terselidiki keputusan-keputusanNya dan sungguh tak terselami jalanjalanNya Sebab siapakah yang mengetahui pikiran Tuhan ? Ataukah siapakah yang pemah menjadi penasihatNya ? Atau siapakah yang pemah memberikan sesuatu kepadaNya sehingga ia harus menggantikannya
(Rm 13:33-35)
BABI

BABI
PENDAHULUAN
1. 1. LA TAR BELAKANG
Dalarn mclaksanakan tugasnya, s~ringkali lintasan yang dilalui robot
didcfinisikan dalam koordinat Cartesian, scmcntara pcngaturan gerakan scbuah
robot pada dasarnya adalah pcngaturan gcrakan pada tiap joint. Bcrbagai
pcnclitian tclah dikembangkan untuk mercncanakan traycktori dalam koordinat
Cart~sian , antara lain pcr~ncanaan traycktori untuk m~nghindal'l rintangan Jalam
ruang kcrja dcngan mcmpcrlakukannya scbagai pcnnasaJahan gcometri (Moravec,
1980; Lozano-Perez, 1983; Brooks dan Lozano-Perez, 1985 ). Pengaturan dengan
waktu minimum mdalui lintasan yang telah ditentukan (Bobrow, 19~5 ) .
Penulisan scbuah hurur atau kalimat adalah scbuah tugas schari-hari yang
dengan mudah dapat dilakukan manusia. Dcngan kcmampuan motorik dan
kemampuan untuk berpikir yang dimil.iki oleh manusia, rncnulis hurur aJalah
sebuah pckcrjaan scderhana yang tidak bcgitu rumit untuk dilaksanakan .
Schubungan dcngan kcmampuan robot yang tcrbatas baik dalam mclakukan
scbuah gcrakan maupun dalam proses pcngambilan sebuah kcputusan, apalagi
jika dil>audingka11 lh.:ngan utga11 tubuh yang din1iliki manusia uutuk mdakuh.an
scbuah gcrakan maupun pcngambilan kcputusan, tugas ini adalah scbuah tugas
yang tidak mudah bagi scbuah robot. Oalam hal ini dibutuhkan scbuah proses
pcrhitungan yang cukup panjang dan rumit , dengan mclibatkan banyak rungsi

matcmatis maupun pcmroscsan olch komputcr scbclum robot bisa digunakan
untuk n1cnjalankan tugas tcrscbut.
Untuk tujuan pcngaturan gcrak robot supaya mcmbcntuk scbuah lintasan
huruf, diperlukan sebuah perencanaan trayektori dcngan mcmperhitungkan posisi
posisi yang dilcwati dan mcnghubungkan posisi-posisi yang dilalui dcngan
mcnggunakan pcrsamaan matcmatis tcrtcntu, schingga dipcrolch suatu gcrakan
yang halus. Traycktori yang dihasilkan dapat digunak.an untuk mcnghasilkan
sinyal rclcrcnsi bagi robot untuk tiap-tiap joint dalam aplikasi yang lcbih lanjut.
Scjauh ini, sctidaknya eli Indonesia, bclum ada pcnclitian khusus tcntang
perencanaan trayektori untuk pcnulisan huruf atau kata. Hal ini bolch jadi
discbabkan pcrcncanaan traycktori untuk pcnulisan huruf atau kata dianggap
sebagai kasus khusus dari perencanaan trayektori secara umum.
1.2. RUIVIl!SAN NIASALAH
Masalah yang hcndak disclesaikan dalam tugas akhir ini bisa dirumuskan
sebagai bcrikut
a. Bagaimana mcncntukan stratcgi gcrakan enJ-ef/(!c/or untuk mcncmpuh suatu
lintasan schingga mcmbcntuk suatu huruf atau kata tcrtcntu.
b. Bagaimana mcngubah gcrakan end-ef/ecf{)r yang sudah thpcrolch dari (a)
mcnJadl gcrakanJOlnl yang scsua1.

.., -'
1.3. BAT ASAN MASALAH
Pada tugas akhir ini bidang yang akan digunakan untuk rncnulis adalah
bidang x-y dalam koordi nat kartesian, sementara hurur yang dapat dituliskan
adalah huruf kecil a-z maupun huruf kapital A-Z. Dalam pembahasannya,
diasumsikan juga bahwa gerakan robot tidak mcmpunyai pembatasan joint (Joint
limitation).
1.4. TUJUAN
Tujuan dari tugas akhir ini adalah mengembangkan sebuah perencanaan
trayektori robot yang dimulai langsung dari gerakan end-effector yang akan
membentuk sebuah huruf atau kata. Kemudian dcngan perhitungan yang
didasarkan pacta algoritma kendali kinematika, akhirnya akan diperoleh nilai-nilai
joint (lintasan joint) yang bersesuaian dengan lintasan end-qffector yang
dikehendaki .
1.5. SISTEMA TIKA PEMBAHASAN
Pada Tugas Akhir ini penulis membagi buku dalam beberapa bagian.
lJrutan pcmbahasan yang dilakukan aJalah schagai hcrikut.
Pcmbahasan latar bclakang pcngambilanjuJul , pcrmasalahan yang
dihadapi, batasan permasalahan yang akan dicapai dan sistcmatika pcmbahasan
diberikan pada bab 1.

Bab 2 mcmbahas teori yang hcrkaitan dcngan pcnnasalahan kincmatika
robot. Pcnjclasan tcntang matriks transfi.nmasi. kmcmutiku instuntuneuus dan
hubungan gaya dan torsi joint dibahas pacta bagian ini.
,Kemudian pembahasan tentan~ percncanaan traycktori yang mcnjadi dasar
bagi gcrakan robot dalam ruang kc~janya akan dibahas pada bab 3. Pada bagian
ini dibabas pula beberapa metode yang scring dipcrgunakan dalam pt:mbangkilan
sebuah trayektori .
Pada bab 4 dibahas tcntang perancangan trayektori yang dipakai dalam
tugas akhir ini, yang dibuat dengan mengacu pada pcmbahasan pada bab
sebelumnya serta metodc yang digunakan dalam tugas akhir ini .
Hasil simulasi dan analisa dari program yang telah dibuat diberikan pacta
bab 5.
Akhimya, pada bab 6 dibcrikan kcsimpulan yang didapat sctclah scmua
pembahasan diatas dan saran untuk pengembangan lcbih lanjut tcntang masalah
yang berkaitan dengan Tugas Akhir ini.

We have been created to love and to be loved. (Mother Teresa, 191 0-1997)
""
BABII
UIUK PERPUSTAitAAH
ITS · I

BAB II
KINEMATIKA ROBOT
Scbuah manipulator dapat dimodclkan scbagai rangkaian tcrbuka bcnda
tegar (link) yang dihubungkan sccara serial dcngan joint revolute maupun
prismatic yang digerakkan oleh actuator. Gerakan relatifjoint akan rnenyebabkan
gerakan pada end-effector menuju posisi dan orientasi yang diinginkan.
Kinematika robot bcrhubungan dcngan studi tcrhadap analisa gcomctri
gcrakan robot tcrhadap sistcm koordinat rcfcrcnsi yang tctap tanpa mcrnandang
gaya ataupun torsi yang menyebabkan gerakan dari manipulator.
Pada bagian ini akan dibahas kinematika robot dengan titik bcrat
pcmbahasan pada kincmatika 1/lslcmlctneuus.
2.1. KINEMATIKA INSTANTANEOUS
Ditunjukkan manipulator planar dcngan 2 dcrajat kcbcbasan scpcrti pada Gambar
2. 1.
Persarnaan kinematika yang rnenghubungkan posisi end-e.ffectur (x,y) ke posisi
joint (8 1 ,8~) diberikan:
x( (}I • Vz ) = /I co.,· O, + / 2 cus( (}I + ('} 2 )
y (O, . OJ= 11 sin U, + 12 .\·m(O, +OJ
dcngan mcndi1Trcnsialkan kcdua pcrsamaan diatas, dipcrolch :
5
( 2. I )
(2.2 )

(2.3)
(2.4)
J02 )" adalah vd.;ror pcrpindahan yang
sangat kccil (displacement) dari enJ-ejf'eclor dan joint.
y
Gambar 2.1 Manipulator planar dengan 2 dcrajat kcbcbasan
Gcncralisasi pcrsamaan (2.3) dan (2.4 ), untuk manipulator dcngnn 11 dcrajat
kcbcbasan dan dimcnsi end-<ifeclor space adalah 111 dibcrikan scbagai :
disini
ada1ah turunan dari vcktor posisi dan orientasi enJ-cjfcctur, dan
( ') - ' - . ))
(2 .6)
(2.7)

serta .J adalah matriks Jacobian (m x n)
axil/ 10 - - (.. 'J ao2 -
7
tviatriks jacobian merepresentasikan hubungan yang sangat kccil antara posisi
joint dengan posisi dan orientasi end-e_[fector.
Matriks .J berisi turunan parsial dari fungsi x(B1• 82 ) terhadap pcncmpatan
joint B1 dan B2 . Matriks .J discbut scbagai manipulator Jacobian. Matriks Jacobian
mcrepresentasikan hubungan yang sangat kecil antara pcncmpatan joint dcngan
posisi end-effector.
Dcngan mcmbagi kcdua stst pcrsamaan (2 .5) dcngan pcrubahan waktu yang
sangat kecil, dapat diperoleh:
Jxe J() -=J-
ell cit
atau lazim ditulis :
v=.!m
(2.9)
(2.10)
Pcrsamaan (2. 1 0) mcnunjukkan hubungan antara kcccpatan r.md-1!_{feclur dan
kcc~.;patan joint yang ditentukan dcngan manipulator Jacobian . Pcrsarnaan ini
seringkali discbut sehagai pcrsamaan kincmatika ins/{111/mleous.

2.3. PERPINDAHAN VIRTUAL (VIRTUAL DISPLACEMENT)
Ditunjukkan sl:buah pcrpinuahan virtual paua tiap joint. dO Jan paua end-
ej/i.xtur, dxe dan scpcrti Jitunjukkan pada Gambar 2.2. Pcrpindahan virtual
adalah perpindahan sembarang yang sangat kecil pada sistem mekanik yang
memenuhi batasan geomerri dari sebuah sistcm. Pcrpindahan virtual berbeda
dcngan pcrpindahan aktual, pcrpindahan virtual hanya mcmcnuhi batasan
gcomctri dan tidak harus mcmcnuhi hukum gcrakan yang lain.
Persamaan (2.5) dapat kita tulis ulang sebagai :
(2 .11)
dengan dxe adalah pcmindahan end-e.flector. Diasumsikan bahwa torsi joint
ri(i = 1,2, ... ,n) dan gaya scrta momcn pada ujung manipulator, J·i(i = 1,2, ... ,m)
bckcrja pada manipulator scmcntarajoint bcrgcscr scbcsar d()i .
Perpindahan virtual yang dikcrjakan oleh gaya dan momcn dibcrikan scbagai :
j' j' dWork = r dB- F dx: .,
" (2. 12)
Menurut prinsip kc~ja virtual (virtual work), rangkaian lcngan dalam
kcadaan: sctimbang jika dan hanya jika kc~ja kc~ja virtual mcnghilang untuk
pcrpindahan virtuil scmbarang. Pcrpindahan virtuil d() dan dxc tidak indcpcndcn
tapi dihubungkan dcngan manipulator Jacobian untuk mcmcnuhi batasan gcomctri
rangkaian lcngan.
Dcngan menggunakan (2.5) kita dapat mcnulis (2.12) sebagai:
( 2. 13)

9
Gambar 2.2 Pcrpindahan virtual pada end-e_f(et.:!ur dan tiap joint
persamaan (2 . i 3) hanya me\ibatkan dO , scbagai indcpcndcn variabcl untuk
perpindahan geomctri yang dapat ditcrima. Untuk mcnghilangkan kcrja virtuaL
dapat diiakukan dengan menghilangkan dWork , schingga persamaan (2. 13)
mcnjadi :
T r:=.! F (2 .14)
Persamaan (2 . i4) menunjukkan hubungan torsi yang diberikan pada tiap joint
d~.:ngan gaya pada eml-t:_/! i.:ctur, yang s~.:ring dis..:but scbagai hubungan gaya statis
robot.

Boleh jadi ia dituntun kebijaksanaan dijalan yang berbelok-belok dahulu, sehingga ia didatangi ketakutan dan getaran, boleh jadi kebijaksanaan menyiksa dia dengan siasat sampai dapat percaya padanya, dan mengujinya dengan segala aturannya Tetapi kemudian kebijaksanaan kembali kepadanya dengan kebaikan yang menggembirakan, dan menyingkapkan kepadanya pelbagai rahasia.
(Sir. 4:17-18)
BAB III

BAB Ill
TRAYEKTORI ROBOT
.Ienis gcrakan robot yang paling scdcrhana adalah gcrakan titik kc titik
(point to point). Pada gerakan ini, robot digerakkan dari kondisi awal ke kondisi
akhir yang diinginkan tanpa mcmandang lintasan yang akan dilalui end-e/}ector .
.Ienis gerakan ini cukup mcmadai jika ruang kerja robot behas dari rintangan . .lika
lintasan yang dilalui olch c!u.l-c.fjector harus mclcwati rintangan scringkali harus
ditambahkan sebuah titik antara (via puint), sehingga end-effector tidak mcnabrak
rintangan yang ada.
Sccara sistematik untuk percncanaan traycktori dapat dibagi mcnjadi dua,
mcliputi :
I. Pcrencanaan dalam koordinatjoint
2. Pcrcncanaan dalam koordinat cartesian
3.1. PERENCANAAN DALAM KOORDINAT JOINT
Dengan pcndckatan ini, kcndala-kcndala (constraints) ditcntukan dalam
koordinat joint. Kcuntungan dalam pcnggunaan pcndckatan ini adalah bahwa
perencanaan dapat langsung dilakukan pada tiap joint, yang dapat sccara langsung
digunakan scbagai acuan untuk tiap link schingga Japat mcnghcmat waktu
komputasi yang dipcrlukan. Kckurangan dari pcndckatan ini adalah, lintasan yang
dilalui oleh end-effector tidak dapat dikctahui .
10 ~ UILIK PERPUSTAKAAH
~ ITS

II
3.2. PERENCANAAN DALAM KOORDINA T CARTESIAN
Pcndckatan ini digunakan jika g~.:rakan enJ-ejj'ectur dinginkan untuk
melewati lintasan tertcntu dalam koordinat kartcsian.
Diagram blok untuk pengendalian robot dalam koordinat kartcsian dapat dilihat pacta Gambar 3.1 .
.------X I .1(014------XJ J
•0 ~I Kr I t F ·I JT G)
l_j • X J
I ...
1 .. ... R
... -.,. '---
.... .... -
{)
• {) •
J X
•8 ~I Kv
-r I
Gambar 3.1 Blok diagram pengaturan robot dalam koordinat Cartesian
3.3. KENDALA-KENDALA (CONSTRAINTS) DALAM
TRAYEKTORIROBOT
lJntuk bcbcrapa tujuan, scringkali robot Jirancang untuk dapat
mcnghinJari rintangun yang aJa, dcngan cara mcnambahkan'' litik-titik Jianlara
titik awal dan titik akhir lintasan. Pada titik-titik yang dilalui, harus dijaga
kecepatan dan pcrcepatan dari enJ-r.:jj'ector schingga diperoleh gcrakan end-
effector yang cukup hal us. Titik- titik yang di lcwati dapat didckati dcngan

12
menggunakan persamaan polinomial orde ke-n . Lintasan robot untuk mcnghindari
rintangan dapat dilihat pada Gambar 3.2
kondisi awal e - via point
Ao~
\ D Kondisi akhir
D ~.__/o ll
rintangan
rintangan
Gambar 3.2. Lintasan robot untuk mcnghindari rintangan
Secara umum lintasan robot dapat didck.ati dcngan mcnggunakan
persamaan polinomial orde ke-n. Untuk mcmpcroleh kurva hasil interpolasi,
digunakan kendala-kcndala (constraints) tcrtcntu yang harus dipcnuhi untuk
memperoleh persamaan k.urva yang hal us.
Pada bagian ini ukan dibahas duu ma<.:am pcndekatan yang sering dipakai
dalam pcrcncanaan trajectory robot, yaitu pcrcncanaan dcngan mcnggunakan
persamaan polinomial ordc kctiga (cubic polynomial) dan pcrsamaan polinomial
ordc kclima.
Persamaan polinomial ordc ke-n dapat ditulis scbagai:
(3.1)

13
Dengan menurunkan persamaan diatas terhadap waktu, diperoleh persamaan
kcccpatan dan pcrccpatan joint scbagai bcrikut:
(3 .2)
•• q (t) = 2a2 + 6a3t 2 + ..... + n(n- I }t,/1
-2 (3.3)
Dengan menggunakan kendala yang ada, maka harga-harg~ dari koctisicn
ak dapat dicari, yang sclanjutnya digunakan scbagai posisi, kcccpatan dan
percepatan referensi robot .
3.3.1. PERSAMAAN I'OLLNOMlAL ORDE TlGA (ClJIUC'I,OLINOMIAL)
Pada bagian 1111, akan dibahas pcmbangkitan trayektori dcngan
menggunakan persamaan polinomial orde tiga. Pcrsamaan ini cukup mcmadai
untuk mcnghasilkan traycktori dcngan banyak via point bcrdasarkan pada
kendala-kendala yang ada.
Secara umum persamaan posJsJ trayektori ordc tiga dapat ditu.l iskan sebagai
bcri k ut:
(3.4)
dengan persamaan keccpatan:
• q(t )= a 1 + 2a2t + 3a3t 2 (3 .5)
Kcndala-kcndala yang ada pada titik awal dapat kita tulis:

14
(3 .6)
Untuk titik akhir traycktori:
(3 .7)
Dcngan menggabungkan pcrsamaan (3.4) sampai (3 .7), dapat dipcrolch em pat
persamaan dengan empat variabel yang tidak dikctahui :
" ., lfo = 0 o +atlo +a2lo~ +a3lo.) (3 .8)
(3 .9)
(3.1 0)
(3 . I I)
Persamaan (3.8) sampat (3 .11) dapat ditulis dalam persamaan matriks mcnjadi :
I " 'oJ qo 'o 'o- ao •
0 I 2t0 "t 2 qo .) 0 (./I
2 3 = (3 . 12)
'1 '1 '1 (12 lf 1
311 2 • 0 I 211 LIJ
Cf[
Dengan menyelesaikan persamaan (3 .12), dipcrolch:
(3. 13)

V1 ~toT[~';oVo +211 )~~A.r +2to)]j;LJ
a3 =~f -tol2qo -2qf]+~f -to rho +qf]} Lt
15
(3.14)
(3 .15)
(3.16)
dimana, Ll = & 1 -t0 )4 merupakan dcterminan dari matriks perseg1 pada
persamaan (3 .12).
Didefi ni sikan:
/=('-'o J '.r -to (3. 17)
sebagai waktu ternormalisasi, dimana 0 ~ r' :S: I .
Dengan mcngcliminasi t pada pcrsamaan (3.4) dan mcnsubstitusikan pcrsamaan
(3 . 1 J)-(3.16) kc pcrsamaan (3.4) dipcrolch pcrsamaan traycktori polinomial ordc
tiga:
(3 .18)
• dimana, (/s = ~f - t 0 )~ .

16
Persamaan (3 .18) adalah persamaan polinomial ord~; tiga antara dua titik
I
['o· 'IO·'I·o] dan [r 0, 'IJ, ,;f l.l ika pcrsamaan yang diinginkan digunakan untuk
melalui bcbcrapa via point, pcrsamaaan (3. 1 ~) dapat digunakan untuk
men ghasi I kan traycktori antara dua titi k yang bcrdckatan, m i sa I nya [r k .q k .q: ]
dan [I k +l , lf k +l·lf k•+l l Persamaan ( 3. 18) dapat dimoditl kasi men jadi:
(3 .19)
dimana,
• • {/ = (t k + l - I k ) q '
dcngan k adalah bilangan intcg~.:r I s k s (n - 1) , dcngan n adalah j umlah v1a
point yang tdah ditcntukan.
3.3.2. l)ERSAMAAN POLINOMIAL OI{DE LIMA
Dengan mcnambahkan kcndala pcrccpatan pada pcrsamnan traycktori ,
maka dipergunakan persamaan polinomial orde lima. Dengan prosedur scpcrti

17
pada poiinomial ordc tiga, persarnaan traycktori untuk polinomial ordt: lima
diperokh(Koivo,A.,J ., 1989):
(3.20)
dim ana,
• c/. =~.r -t 0 )~
•• ' I )" •• l( = I( .! - { 0 ~ (j
, ('-'o ] , t= , O ~ t ~ l t.r - t0
Untuk trayektori dengan beberapa via point:
(3.2 1)
dim ana,
I ~ k ~ (n- 1), 11 jumlah via point

1~
• • (/ = (t k +l -I k )q
•• <{\' = (t k +l - { k )
2 :;
Dcngan mcnguraikan pcrsamaan (3 .21) dapat dipcrolch :
t 3 ,3 . I..., e , 3 ,21 .\' .\' { ) ( .. . J
(t) lfk +l +(t) (1-/ .)lfk+l-qk +l +(t) (1-t) 2 lfk+l-6llj,.+l+12qk +l
(3.22)
misalkan:
l ,\' ,\' (
.. . J ]) =2 <jk +1-6lfA-+1+12tjk l i
Pcrsamaan (3 .22) dapat ditulis scbagai :

19
+ (3/J - A-(.' - ?.n~' J + (n - n~'Y> (3 .23)
Pcrsamaan (3.23) adalah persamaan polinomial orde lima untuk dua titik yang
[ . ••] berdckatan tk ,Lfk ,lfk ,qk dan [ ] • •• I k + I ,(j k + 1 ' 'f k + 1 • Lf k 1- J ·
Dengan menurunkan persamaan diatas terhadap waktu, diperoleh pcrsamaan
kcccpatan :
(3 .24)
dan perccpatan :
+ 12(38- A - C - 2/J~·y + 20(LJ- H~, r (3 .25)
Pcrsamaan (3-23)-(3.25) adalah pcrsamaan yang dipakai untuk mcmbangkitkan
traycktori robot bcrdasarkan pcrsamaan polinomial ordc lima yang dipakai dalam
Tugas Akhir ini.
~ MILIK P~RPUSTAKAAN '¥} ,.·~ · ITS

Apa yang tidak pernah dilihat oleh mata, dan tidak pernah didengar oleh telinga, dan yang tidak pemah timbul dalam hati manusia; semua yang disediakan Allah untuk mereka yang mengasihi Dia.
(I Kor. 2:9)
BABIV

I
BABIV
l'l~RENCANAAN TRAYEKTORI liNTliK PENliLISAN
HURUF
Pembangkitan trayektori untuk pcnulisan scbuah hurur dapat dipandang
sebagai trayektori dcngan n posisi antara. Dcngan mclalui posisi-posisi antara
yang telah diberikan, enJ-ejj"eclur dapat bergerak mcngikuti lintasan sebuah huruf.
4.1. PEMBANGKlTAN KENDALA-KENDALA (CUNS"IUAINTS) POSISI
Kendala-kendala (construints) posisi untuk tiap huruf, diperolch dcngan
melakukan 'scanning' hasil tampilan huruf pada mode grafik fungsi pustaka yang
discdiakan oleh Turbo C++ 3.0. Dari hasil scanning data yang dipcrolch , data
diurutkan dcngan mcncntukan posisi awal rx:.nulisan huruf. Untuk proses
pengurutan hurut: hurufyang ada dapat dibagi mcnjadi dua kasus.
1. Untuk kasus yang pertama, huruf yang ditulis adalah huruf yang kontinyu,
dalam artian proses penuli san untuk tiap posisi cukup dilakukan sckali tanpa
mdcwati lintasan yang sama. Scbagai l:Ontoh aJalah hurur 'u'. 'h' dan hurur
'e '.
2. Untuk kasus kedua, huruf yang ditulis adalah hurur yang tidak kontinyu,
dimana proses pcnulisan pada posisi tcrtcntu akan mclcwati posisi yang sama
lt.:bih dari sckali . Scbagai contoh adalah huruf" 'A'. 'W dan huruf 'e
Untuk kasus yang pcrtama, sctclah pcncntuan pos1s1 awal posisi bcrikutnya
diperoleh dengan mencari posisi terdckat dari pos1s1 scbelumnya. Pcncntuan
posisi tcrdckat di pcrolch dcngan mcnggunakan rum us jarak :
20

21
( 4. I )
Untuk kasus kcdua dcngan cara yang sama, jika ditcmui posisi yang jaraknya
sama akan dipilih posisi yang dapat meminimalkan pcngulangan, pcmilihan
dilakukan sccara manual.
Pada file ditambahkan kendala-kcndala (constraints) waktu untuk tiap
pos1st. Waktu yang dipakai dalam file adalah waktu tcrnormalisasi , dimana
0 s ttmwrmalim.vi s 1 , sebagaimana telah dibahas sebelumnya. Hcsarnya waktu
ternonnalisasi pada posisi ke-k untuk tiap huruf dihitung dengan menggunakan:
( I I I k = k * ( )lenumlllllint<i . / / l
JWll a u uta) (4.2)
dimanajumlahdata adalah jumlah constraint posisi tiap huruf
4.2. TRANSFORMASI KOORDINAT SCREEN KE KOORI>INAT
CARTESIAN
Hasil 'scanning' dalam koordinat 's<.:reen' mcmpunyai koordinat yang
bcrbcda dcngan koordinat kartcsian . Sistcm koordinat '.,·cwllllll.l!,' Japal <.kngan
contoh posisi huruf koordinat hurur 'o' dilihat pada < iambar 4.1 ,,
Pada Gambar 4. 1 ukuran huruf 'a' adalah /0 x 30 dcngan dirncnsi dalam
pixel. Dari pcrolchan hasil scanning data ycng dipcrolch untuk posisi x bcrkisar
antara 0-16 Jan posisi y bcrkisar antara 12-40. Dari data yang ada, maka Iebar Jan
tinggi huruf yang dipakai ditcntukan scbcsar 20 dan 24 pixel.
am bar 4.1 posisi hasil scanning huruf a relatif terhadap koordinat screen

16 --
.. y
X
Gambar 4.1 Posisi hasil scanning huruf a n;latifterhadap koordinat screen
II
Karena koordinat diatas sumbu y tidak memiliki nilai ncgatif dan posisi untuk y
positif berlawanan arah dengan sumbu kartesian, dilakukan transformasi sumbu
koordinal posisi huruf posisi y dcngan mcnggunakan rum us :
Y,~ ... = (- YuM )+ C ( 4.3)
dimami C sebuah adalah kostanta yang menentukan jarak posisi terbawah dari
huruf terhadap sumbu y. Harga C di atur sebesar 40, dcngan memperhatikan
tinggi dari hurur hasil 'scwu1ing,'.
Posisi baru hasil translormasi dapat dilihat pada Gambar 4.2.
Satuan pixel dalam file yang ada diubah mcnjadi satuan meter dengan
mcnggunakan :
p'"'". = p.,,J I I 00 (4.4)
schingga Iebar dan tinggi untuk tiap huruf adalah 0,2 x 0,4 m.

y
X
Gambar 4 .2 Posisi hurura rclatift~rha<..lap koor<..linat kart~sian
4.3. TRANSLASI KOORDINAT lJNTlJK PENULISAN 1-llJIUJF
Karena scmua posisi huruf yang tcrsimpan mcmiliki range postst yang
sama, untuk dapat mcnuliskan huruf sccara tcratur, dipcrlukan translasi untuk
meggesc:r posisi dengan awal huruf. Proses pcrgescran hurur dapat <..lilihat pa<..la
Gambar 4.3. Besar harga translasi ditcntukan dcngan mcngacu pada posisi awal
huruf yang akan ditulis dan j um lah huruf yang akan ditul is.
Pada kondisi awal, end-ejji:ctor be raJa pada posisi (x,"''" .~\', ,..,,1 ). kcmuJian
bcrgcrak mcnuju posisi awal hurur pcrtama yang akan <..litulis.
Harga translasi untuk pcnulisan hurufkc-k dihitung d~ngan :
v(k) - (' ~ lronsla.\'1 - )' (4 .6)
dimana n jumlah hurufyang ingin dituliskan, /elwr adalah Iebar dari huruf
dan Cv konstanta. Untuk transisi antar huruf berikutnya end-ejfector mcngambil

24
posisi awal dari harga tcrakhir huruf yang ditulis, mcnuju pos1s1 awal hurur
bcrikutnya.
posisi huruf sctclah ditranslasi
y
Gambar 4.3 Translasi koordinat huruf
Scmua proses gcrakan dari pos1s1 awal kc posisi akhir dilakukan dcngan
mcnggunakan persamaan polinomial ordc 5 dcngan mcngacu pada pcmbahasan
bab sebel umnya.
:Gambaran lcngkap untuk proses pcncnluan Lranslasi maupun Lrans1s1 11ap
huruf dapat dilihat pada Gambar 4.4.

Posisi ;mal robot
•
y
tr _a_n _ _:__· i_s ~-· ~----. transisi
·. r; ·~"-:. .......... ~
translasi y : ..... \., ..... :/
... .... tmnslasi x
..
Gambar 4.4 Translasi dan transisi koordinat huruf
25

We can do no great things, only small things with great love (Mother Teresa, 191 0-1997)
BABV

l
BABV
ANALISA HASIL SIMULASI
Untuk mcngcvalusi program yang tclah dibuat, pada bagian ini akan
ditampilkan hasil simulasi program untuk kasus pcnulisan hurur maupun
pcnulisan kata. Pada simulasi yang pcrtama robot digunakan untuk rncnuliskan
scbuah huruf 'e' , scdang simulasi yang kcdua robot digunakan untuk mcnuliskan
sebuah kata 'elits'
lJntuk mcmpcrmudah pcrhitungan, digunakan .JCnis dan karaklcr link yang
sama yaitu panjang link sebesar 0,25 m , massa I kg, dan momcn incrsia 4,3
kg.m2. Konfigurasi awal dari robot dapat dilihat pada Gambar 5.1
X
Gambar 5. I Kontigurasi awal robot
Pada simulasi yang dilakukan , tiap huruf dibcri Iebar dan tinggi masing-masing
sebesar 0,2 m dan 0,4 m. Sebelum dan diantara penulisan huruf, discdiakan \:v·aktu

27
transisi yang pada simulasi dibcri waktu scbcsar 2 dctik . S~..:dangkan waktu untuk
pcnulisan satu huruf adalah 5 dctik, dcngan waktu sampling yang Jipakai 0,00 I
dctik .
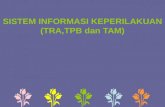
5.1. S'MULASI PENULISAN HURUF 'e'
Pada simulasi yang pcrtama untuk pcnul isan huruf ' e' t:nd-ef(~ctor
bergerak dari posisi awal di titik (-0.4263 , 0.4263 ) mcnuju posisi awal untuk
penulisan huruf ' e' di titik (-0 .1, 0.28) selama 2 detik , kemudian mulai menulis
huruf selama 5 detik.
Posisi referensi dan hasil simulasi posisi titik koordinat yang dilalui olch enJ-
e.fl ector dapat dilihat pada Gambar 5.2 dan Gambar 5.3. Untuk posisi rcferensi dan
hasil simulasi pada arah sumbu x dan y dapat dilihat pada Gambar 5.4 dan 5.5.
Scmcntara posisi tiap joint sctiap waktu dapat dilihat pada Gambar 5.6
-E E >-
~-·-- - 400
• • • • • • . :. • • I • • • •• • .I I I ••• • • • • • •••• • ' • • I I
I ••••• 62()t) , . •
I I '
0 -150 -100 -50 0 50 100
x (mm)
Gambar 5.2 Posisi rcfcrcnsi pada sumbu koordinat \-y
~ MK.IK P£RPUS'TAlWM '
~~ ITS

-E E -
-150
400
••••••••••• •• •• [ ......... ...... ) •• •
-100
• • • • • €0.
-50
x(mm)
0 '
0 50
Gambar 5.3 Posisi basil simulasi pada sumbu koordinat x-y
2X
100
Untuk posisi enJ-ef}ector sebagai fungsi waktu dapat dilihat pada Gambar 5.4 dan
5.5.

29
100
0
0 e -1oo E ->< -200
---x desired -r.n ·- - - - - - x sim ulasi r.n g_ -300
-400
-500 - -- -- --- - - --
waktu (detik)
Gambar 5.4 Grafik posisi :x terhadap waktu

450
400
-E 350 E -~ 300 en ·-en 0 250 c.
200
150
0
.......... -
2
'
4
waktu (detik)
6
Gambar 5.5 Grafik posisi y terhadap waktu
30
---x desired
- - - - - x sim ulasi '-·--- --- - ·-

,........... ~ ro . __, ro ~
Q) "0 ---~ c 0 .__, ~
:::J "0 :::J (/)
2ED -
21)
1EO
100 _ _,...
EO ---- -~ 0 · - -
-EO 0 1 2
-100 -
-1EO -
-an -- -- --- ---- - -- - - -- ··-- -
....
3 4
vB<tu (d:tik)
........ .... ..... -- -..... ____ _
--- .... ...... F.
--~ .... ......... 5
Gam bar 5.6 Grafik posisi sudut joint terhadap waktu
'
--s..dtjdrt 1
• • • SLd..t jdrt 2
- .. - s..rl1 jdrt 3 7 - -- -·- - - - -· -- --·-
.3 1

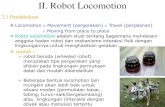
5.2. SIMULASI PENUL/SAN KA TA 'elits'
"'I -'-
Pada simulasi ini, end-ejjector dipergunakan untuk menuliskan sebuah
kata 'elits'. Posisi rcferensi dan hasil simulasi dalam sumbu koordinat cartesian
dapat dilihat pada Gambar 5.7 dan Gambar 5.8.
E E
-E E -
,-----1
! I I I
-600
p ··-
-400
~--- ·-----
1
I I
I ,e I I I
-600 -400
--- - -- 600
-200
200
0 0
x(mm)
-- ------- -600-,-
-200
i I
I! 200 ;
I
0
0
x(mm)
200 400
200 400
Gambar 5.7 Posisi referensi pada koordinat x-y
Gambar 5.8 Posisi hasil simulasi pada koordinat x-y
600
600

..,., _)-'
600 ,i ~
t;tl ~ f a:
400 I 1 "\ //,, I ~ ... I~
Si '(
:~ - 200 I J I
E E - o I I >< I x desired
1/) b 15~ ~ 1/) 5 10 25 ~0 ----·- · X simulasi
-·-·---0 c. -200
-400
-600
waktu (detik)
Gambar 5.9 Grafik posisi x terhadap waktu

600
500
- 400 E E -.~ 300 CJ) ·-CJ) 0 a. 200
100
0 0 5 10
'
15 20 25 30
waktu (detik)
Gam bar 5. I 0 Grafik posisi y terhadap waktu
35
---y desired
y simulasi
3-l

250 1-------200 -1
- 150 _J .... nJ . ...., nJ 100 a-(I) "0 - 50 .... c:: ·-0 0 -- --. ._... ·-tJ)
-50 ° ·- 5 tJ)
0 a. -100
-150
-200
- -·-- ---------------
10 15 2
waktu (detik)
I I
I :, ;JI I ' I I I
' . ' \/ '
Gam bar 5. I I Graril.; posisi sudut joint krhadap \\aktu
--joint 1
- - - joint 2
----- joint 3 5
).

36
Grafik posisi x dan posisi y scbagai fungsi waktu dapat dilihat pada Gambar 5.'1
dan 5. 10. Scmcnlara Jari (l;.unhar 5.11 kita Japal IIH.:Iihal l)l>Sisi tiap _1oint pa<..la
setiap waktu. Dari Gambar 5. 11 dapat dilihat, bahwa mcskipun pcrencanaan
traycktori dilakukan dalam koordinat cartesian, tidak d1jumpai lompatan yang
cukup bcrarti dalam posisi joint.

BABVI

BAB VI
PENUTUP
6.1. KESIMPULAN
Dari pcmbahasan yang tclah dilakukan pada tugas akhir ini , dapat diambil
beberapa kesimpulan. Kesimpulan-kesimpulan tersebut adalah:
1. Pada tugas akhir ini telah dikembangkan suatu simulasi pcmbangkitan
trayektori dcngan banyak batasan yang digunakan sebagai traycktori untuk
penulisan sebuah huruf maupun kata.
2. Dari hasil data yang diperoleh, meskipun pcngaturan dilakukan dcngan
menggunakan koordinat cartesian, tidak tcrdapat lompatan harga yang bcrati
setelah diubah dalam pada koordinat joint, sehingga dalatn, pengcndalian
gerakan melalui joint tidak akan dijumpai masalah yang cukup bcrani .
6.2. SARAN
Saran-saran yang dapat dibcrikan dengan tersclesaikannyu tugus ukhir ini
adalah:
I. Dalam pcngcmbangan lcbih lanjut, pcrlu dikcmbangkan scbuah pcnclitian
sehingga dalam aplikasinya robot dapat digunakan untuk menulis pada bidang
37

tulis yang bisa diubah-ubah, maupun untuk mcnulis bcrbagai karaktcr yang
ada.
2. Pcrlunya dimasukkan dinamika robot dengan memasukkan gaya yang timbul
karcna adanya karcna intcraksi robot dcngan lingkungan , karcna dalam
kcnyataanya untuk dapat mcnuliskan scbuah huruf atau kala, end-ef/ec.:tor
hants bcrintcraksi dcngan lingkungannya dalam hal ini adalah bidang tulis,
sehingga robot dapat mcnulis dengan baik tanpa mcrusakkan pcna yang ada di
end-(:ffi::·ct ur

DAFTAR PUSTAKA
ff.lS\ UIUK PERPUS'T~ \
~ ITS .

DAFTAR PUSTAKA
An, C., H., Atkeson, C.,G., Hollerbach, J.,M., Model-based Control of a Robot
Manipulator, MIT Press, I 988.
Asada, H. dan Slotinc,J.E. Robot Analysis and Control, Massachusettes, John
Wiley and Sons, lnc. , 1986.
Bobrow, J., E., Dubowsky, S., dan Gibson, J., S., Time Optimal of Control
Robotic Manipulator Along Specified Path, Int. J. Robotic Rescarch,4,3,
1985.
Jazidie, A., Modeling and Simulation Impedance Control of Redundant
Manipulator Systems, Doctoral Dissertation, Facultty of Engineering
Hiroshima, Hiroshima University, 1995.
Koivo, A., J., Fundamentals for Control of Robotic Manipulators, Canada, John
Willey and Sons, Inc. , 1989.
Lozano-Perez, T., Spatial Planning A Configuration Space Approach, IEEE
Trans. Computers, 1983
Moravec, H., P., Obstacle Avoidance and Navigation in the Real World by a
Seeing Robot Rover, Doctoral Dissertation, Stranford University, 1980.
Spong, M,. W. dan Vidyasagar, M. , Robot Dynamics and Control, Canada, John
Wiley and Sons, Inc., llJSlJ.
Wibowo, A. ,B., Pcrancangan dan Pcmbuatan Program Simulasi Dinamik Lengan
Robot dengan Menggunakan Metode Appei-Gibbs, Tugas Akhir, Tcknik
Elektro ITS, 1996.

A journey of thousand miles starts with a single step and if that step is the right step, it becomes the last step
(Lao Tzu)
LAMP IRAN

LAMPIRAN A: MODEL HURUF

Riwayat pendidikan :
RIWAYAT HIDUP
Tonny Leonard dilahirkan di Surabaya 5 Juni I <.J72 , scbagai
anak ke dua dari tujuh bersaudara kcluarga Henry Eduard.
Bcrtcmpat tinggal di Pakis Tirtosari I OA/ I Surabaya. Scjak
tahun 1991 terdaftar sebagai mahasiswa Tcknik Elektro
Institut Tcknologi Sepuluh Nopembcr Surabaya.
• TK YPKP Surabaya lulus tahun 1979
• SON Pakis I Surabaya lulus tahun 1985
• SMPN 10 Surabaya lulus tahun In8
• SMAN 5 Surabaya lulus tahun 1991
Pada bulan Agustus I 998 mcngikuti seminar dan ujian Tugas Akhir di bidang
studi Teknik Sistem Pengaturan, Jurusan Teknik Elektro FTl-lTS scbagai salah
satu syarat untuk mempcroleh gelar Sarjana Teknik Elektro.