Micro Controller
17
TUGAS PROGRAM PNEUMATIK DAN HIDROLIK PERBEDAAN PLC DAN MICROCONTROLLER Disusun oleh: Imron Hamzah (I1414022) JURUSAN TEKNIK MESIN
-
Upload
indra-purnama -
Category
Documents
-
view
216 -
download
3
description
rahasia
Transcript of Micro Controller
TUGAS PROGRAM PNEUMATIK DAN HIDROLIK
PERBEDAAN PLC DAN MICROCONTROLLER
Disusun oleh:Imron Hamzah (I1414022)
JURUSAN TEKNIK MESINFAKULTAS TEKNIKUNIVERSITAS SEBELAS MARET2014MICROCONTROLLERA. Pengertian MicrocontrollerMicrocontroller adalah sebuah chip yang didalamnya terdapat mikroprosesor yang telah dikombinasikan dengan I/O dan memori (ROM/RAM). Penggunaan mikrokontroler lebih menguntungkan dibandingkan penggunaan mikroprosesor. Hal ini dikarenakan dengan mikrokontroler tidak perlu lagi penambahan memori dan I/O eksternal selama memori dan I/O internal masih bisa mencukupi. Selain itu proses produksinya secara masal, sehingga harganya menjadi lebih murah dibandingkan mikroprosesor.1. Jenis- Jenis MikrokontrolerSecara teknis, hanya ada 2 macam mikrokontroller. Pembagian ini didasarkan pada kompleksitas instruksi-instruksi yang dapat diterapkan pada mikrokontroler tersebut. Pembagian itu yaitu RISC dan CISC.a. RISC merupakan kependekan dari Reduced Instruction Set Computer. Instruksi yang dimiliki terbatas, tetapi memiliki fasilitas yang lebih banyak.b. Sebaliknya, CISC kependekan dari Complex Instruction Set Computer. Instruksi bisa dikatakan lebih lengkap tapi dengan fasilitas secukupnya.Masing-masing mempunyai keturunan atau keluargasendiri-sendiri. jenis-jenis mikrokonktroler yang telah umum digunakan.a) Keluarga MCS51 Mikrokonktroler ini termasuk dalam keluarga mikrokonktroler CISC. Sebagian besar instruksinya dieksekusi dalam 12 siklus clock. Mikrokontroler ini berdasarkan arsitektur Harvard dan meskipun awalnya dirancang untuk aplikasi mikrokontroler chip tunggal, sebuah mode perluasan telah mengizinkan sebuah ROM luar 64KB dan RAM luar 64KB diberikan alamat dengan cara jalur pemilihan chip yang terpisah untuk akses program dan memori data.Salah satu kemampuan dari mikrokontroler 8051 adalah pemasukan sebuah mesin pemroses boolean yang mengijikan operasi logika boolean tingkatan-bit dapat dilakukan secara langsung dan secara efisien dalam register internal dan RAM. Karena itulah MCS51 digunakan dalam rancangan awal PLC (programmable Logic Control).b) AVRMikrokonktroler Alv and Vegards Risc processor atau sering disingkat AVR merupakan mikrokonktroler RISC 8 bit. Karena RISC inilah sebagian besar kode instruksinya dikemas dalam satu siklus clock. AVR adalah jenis mikrokontroler yang paling sering dipakai dalam bidang elektronika dan instrumentasi.Secara umum, AVR dapat dikelompokkan dalam 4 kelas. Pada dasarnya yang membedakan masing-masing kelas adalah memori, peripheral dan fungsinya. Keempat kelas tersebut adalah keluarga ATTiny, keluarga AT90Sxx, keluarga ATMega dan AT86RFxx.c) PICPada awalnya, PIC merupakan kependekan dari Programmable Interface Controller. Tetapi pada perkembangannya berubah menjadi Programmable Intelligent Computer.PIC termasuk keluarga mikrokonktroler berarsitektur Harvard yang dibuat oleh Microchip Technology. Awalnya dikembangkan oleh Divisi Mikroelektronik General Instruments dengan nama PIC1640. Sekarang Microhip telah mengumumkan pembuatan PIC-nya yang keenam PIC cukup popular digunakan oleh para developer dan para penghobi ngoprek karena biayanya yang rendah, ktersediaan dan penggunaan yang luas, database aplikasi yang besar, serta pemrograman (dan pemrograman ulang) melalui hubungan serial pada komputer.2. Memory Map Mikrokontroler AVR memiliki peta memori yang terpisah antara memori data dan program.Memory data : berupa memory volatile (RAM) yang terbagi atas :a) 32 register General purpose (alamat 0x00 sampai 0x1F)b) 64 register I/O (alamat 0x20 sampai 0x5F) register yang digunakan untuk mengatur fungsi beberapa peripheral mikrokontrolerc) SRAM internal (alamat 0x60 sampai 0x25F)Memori program : berupa flash memory (non volatile) yang bisa dihapus tulis. Memory program tersusun atas word (2 byte) karena setiap instruksi memiliki lebar 16 bit atau 32 bit. ATmega8535 memiliki 4KWord flash dengan alamat 0x000 sampai 0xFFF. Flash tersebut dialamati oleh program counter (PC)3. Bahasa AssemblyTersusun dari instruksi-instruksi berupa kata-kata singkat dan dieksekusi perbaris. Contoh program dalam bahasa assembly:;program menghidup-matikan LED di port B.NOLIST.INCLUDE "C:\appnotes\m8535def.inc" ;menggunakan file include atmega8535 ;berisi definisi2 periferal atmega8535.LIST.DEFmp = R16 ;melakukan rename terhadap r16 menjadi mp;program utamamain:ldimp,0b11111111; The command LDI (LoaD Immediate) loads an 8-bit value into the register; mp. This command is only valid for the registers R16 to R31.outDDRB,mp; The command OUT writes register values (here: mp or R16) to a port; (here DDRB).loop:ldimp,0x00;hidupkan LEDoutPORTB,mprcalldelay;panggil subrutin delayldimp,0xFF;matikan LEDoutPORTB,mprcalldelay;panggil subrutin delayrjmploopdelay:;definisi subrutin delayldiR17,#0xFF;subrutin tunda menggunakan pengurangan register berulang2del1:ldiR18,#0xFFdel2:decR18;r18=r18-1brnedel2;jika belum 0, lompat ke del2decR17;r17=r17-1brnedel1ret;subrutin selalu diakhiri ret
B. Fiture pada MicrocontrolerSebuah chip mikrokontroler umumnya memiliki fitur:1. central processing unit - mulai dari prosesor 4-bit yang sederhana hingga prosesor kinerja tinggi 64-bit.2. input/output antarmuka jaringan seperti port serial (UART) antarmuka komunikasi serial lain seperti IC, Serial Peripheral Interface and Controller Area Network untuk sambungan sistem periferal seperti timer dan watchdog3. RAM untuk penyimpanan data4. ROM, EPROM, EEPROM atau Flash memory untuk menyimpan program komputer5. pembangkit clock - biasanya berupa resonator rangkaian RC6. pengubah analog-ke-digital
C. Contoh Aplikasi Mikrokontroler dan Programnya Tahap pertama adalahmerancang perangkat keras (hardware), yang meliputi rangkaian rangkaian elektronika dan alat putar keramik. Tahap kedua adalah perancangan algoritma, listingprogram pada software Code Vision AVR dan penanaman listing program padamikrokontroler AVR ATMega16 dengan menggunakan software ISP Programmer. 1. Perancangan Perangkat KerasSeluruh perangkat atau komponen yang digunakan dalam perancangan pengaturan kecepatan pada alat putar keramik menggunakan motor AC ini, tersusun seperti pada blok diagram di bawah ini.
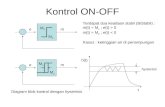
Gambar 1. Blok Diagram Pengaturan Kecepatan Motor ACpada Alat Putar Keramik.
Blok diagram diatas, secara garis besar dapat dijelaskan sebagai berikut:a. Keypad digunakan sebagai alat untuk memasukkan nilai kecepatan putaran yangdiinginkan (nilai setpoint). Keypad dihubungkan ke PORTB mikrokontroler AVRATMega16. Nilai dari keypad tersebut mewakili nilai kecepatan putaran dengansatuan rotation per minute (rpm). Nilai yang diijinkan sebesar antara 60150rpm.b. Nilai setpoint akan diolah sedemikian rupa dengan menggunakan suatu programyang ditanamkan pada mikrokontroler AVR ATMega16, sehingga nilai tersebutdapat ditampilkan pada LCD dan digunakan pada register OCR1A yang berfungsiuntuk membangkitkan sinyal PWM.c. Sinyal PWM dibangkitkan setelah nilai pada register OCR1A terisi (OCR1A 0)dan sinyal PWM dikeluarkan melalui Pin 19 PORTD.5 (OC1A) padamikrokontroler AVR ATMega16.
d. Sinyal PWM tersebut akan memicu TRIAC Optoisilator pada rangkaian drivermotor AC. Rangkaian zero crossing detector telah tersedia dalam satu paket (Onpackage)IC TRIAC Optoisolators MOC3041, sehingga titik acuan sinyal PWMpada saat mengatur sinyal sinusoidal (tegangan AC) dimulai pada saat perpotongantitik nol (zero crossing). Keluaran dari TRIAC Optoisolators tersebut (pin 6) akanmemicu gate TRIAC (Q4004LT) sehingga memberikan arus pada motor AC.e. Motor AC akan menggerakkan alat putar keramik dan alat putar tersebut akandideteksi putarannya setiap 1 detik (Timer 0) oleh sensor putaran (phototransistor).Pendeteksian putaran alat putar ini bertujuan untuk mengetahui apakah kecepatanputaran alat putar sama dengan nilai setpoint yang diberikan. Kecepatan alat putarakan dipengaruhi oleh beban (tanah liat) yang bervariasi. Kecepatan akanberkurang apabila beban semakin berat, oleh karena itu sensor pun berfungsi untukmengetahui kecepatan alat putar terhadap beban.Fitur interupsi eksternalmikrokontroler akanmengetahui setiap kali sensor memberikan respon (logika 0).f. Program pengaturan alat putar padamikrokontroler ATMega16 akan mengatur danmembandingkanantara kecepatan setpoint dan kecepatan yang sesungguhnya (realtime). Jika sensor mendeteksi kecepatan alat putarsetpoint-nya, maka programakan mengatur (mengurangi) nilai padaOCR1A dan jika sensor mendeteksi kecepatan alat putar lebih lambat dari padakecepatan setpointnya, maka program akan mengatur (menambahi) nilai padaregister OCR1A.
2. Perancangan RangkaianSistem Minimum AVR ATMega16Mikrokontroler AVR ATMega16 dapat dioperasikan dengan cara menambahkanbeberapa komponen elektronika yang berfungsi sebagai komponen pendukungnya.Mikrokontroler AVR ATMega16 dapat dioperasikan dengan cara menambahkanbeberapa komponen elektronika yang berfungsi sebagai komponenpendukungnya.Mikrokontroler dan komponenkomponen pendukung tersebut tergabung dalam saturangkaian yang disebut sebagai rangkaian sistem minimum.
Gambar 2. Rangkaian Sistem Minimum AVR ATMega16
Kristal yang digunakan pada rangkaian sistem minimum di atas, mengunakanfrekuensi 4 MHz. Kristal tersebut digunakan untuk pembangkit clock (osilator), dimanasetiap 1 intruksi/perintah dalam program dieksekusi dalam 1 siklus clock. Pin RESETdihubungkan dengan rangkaian kombinasi RC dan push button, yang bertujuan agarmikrokontroler dapat di-reset. Fungsi dari port - port lainnya adalah sebagai berikut.a. PORTA, digunakan sebagai pin masukkan untuk Keypad 3X4b. PORTB, digunakan sebagai pin keluaran untuk LCDc. PORTD.0 dan PORTD.1, digunakan sebagai pin masukan untuk tombol START dan tombol STOPd. PORTD.3, digunakan sebagai pin masukkan untuk sensor putaran (Ext. Interrupt)e. PORTD.5 dan PORTD.6, digunakan sebagai pin keluaran untuk sinyal PWM.3. Perancangan Rangkaian DownloaderRangkaian downloader merupakan rangkaian penghubung antara komputer danmikrokontroler yang berfungsi untuk memasukan listing program (berupa bit bitlogika) ke dalam mikrokontroler. Listing program yang dikirim oleh software darikomputer ke dalam mikrokontroler biasanya berbentuk file *.hex (heksadesimal). Padaumumnya rangkaian downloader terdiri dari kabel penghubung jenis DB25 atau jenis DB9.Sinkronisasi tegangan antara tegangan dari komputer dan teganganmikrokontroler menggunakan sebuah buffer. Rangkaian downloader ditunjukkan sepertigambar di bawah ini :
Gambar 3. Rangkaian downloader DB 25
Gambar 4. Rangkaian downloader mikrokontrolerRangkaian di atas menggunakan port DB 25 sebagai alat penghubung antara komputer dan alat downloader,sedangkan IC 74HCT244 digunakan sebagai buffer. Software yang digunakan untuk mendownload program (file: *.hex) ke dalam mikrokontroler ini adalahISP Programmer (Adam Dybkowsky).
Gambar 5.Tampilan Software ISP Programmer (Adam Dybkowsky)
PLC (Programmable Logic Controller)A. Pengertian PLCPLC atau disebut juga programmable controller adalah suatu alat sejenis komputer (controller elektronik) dengan fitur-fitur yang cukup lengkap, yang digunakan untuk mengendalikan instrumen dalam suatu industri. Berbeda dengan microcontroller, PLC memiliki jumlah slave I/O yang relatif jauh lebih banyakSelain Noise, hal yang juga perlu diperhatikan pada aplikasi jarak jauh (puluhan atau ratusan meter) adalah losses pada kabel. Oleh karena itu jugalah PLC menggunakan level tegangan yang relatif tinggi, yaitu tipikal 24 Volt, supaya persentase losses daya menjadi relatif lebih kecil pada transmisi sinyal jarak jauh.Karena kemampuannya pada aplikasi untuk jarak jauh inilah, PLC cocok digunakan untuk mengendalikan proses-proses pada sebuah pabrik, di mana sensor dan aktuator bisa tersebar di sekitar bangunan pabrik yang berjarak ratusan meter dari Master Controller.PLC biasanya digunakan untuk menangani industri dengan pengaturan input/output digital (on-off), dan yang membutuhkan adanya logic operation. Terutama digunakan untuk mengatur suatu relay, karena bekerja secara digital (on-off). Dituntut memiliki scanning time yang cepat dengan orde 1 milisecond.Terdapat lima tipe bahasa pemrograman yang bisa dipakai untuk memprogram PLC, meski tidak semuanya di-support oleh suatu PLC, yaitu antara lain :1. Bahasa pemrograman Ladder Diagram (LD)2. Bahasa pemrograman Instruction List (IL)/Statement List (SL)3. Bahasa pemrograman Sequential Function Chart (SFC)/Grafcet4. Bahasa pemrograman Function Block Diagram (FBD)5. Bahasa pemrograman tingkat tinggi (high-level), contohnya Visual Basic
B. Perbedaan Antara PLC dan Microcontrollerjika dibandingkan dengan microcontroller. Berikut ini tabel perbandingan PLC versus Microcontroller :PLCMicrocontroller
Merupakan pengembangan dari rangkaian digital berbasis relayMerupakan pengembangan dari rangkaian digital berbasis transistor
Memiliki fungsi dan fasilitas utama dari mikrokomputer yaitu timer, counter, ALU (Arithmatic Logic Unit), dll.Memiliki fungsi dan fasilitas utama dari mikrokomputer yaitu timer, counter, ALU (Arithmatic Logic Unit), dll.
Kecepatan eksekusi program relatif rendah (jika dibandingkan dengan mikrokontroler) karena switching bersifat mekanik.Kecepatan eksekusi program relatif rendah (jika dibandingkan dengan PLC) karena switching bersifat elektrik.
Input/Output (Slave I/O) relatif banyakInput/Output (Slave I/O) relatif sedikit
Supply daya ke instrumen yang dikendalikan (output) besar karena menggunakan level tegangan yang relatif besar, yaitu berkisar antara 20 sampai 30 volt (biasanya 24 volt).Supply daya ke instrumen yang dikendalikan (output) kecil karena menggunakan level tegangan yang relatif rendah, yaitu level TTL (Transistor Transistor Logic, 5 volt).
Sensor dan actuator sudah tersedia dalam bentuk modul-modul (dijual terpisah dari Master PLC).Sensor dan actuator harus di interface terdahulu oleh engineer jika ingin digunakan.
Jarak antara Master dan Slave dapat mencapai ratusan meter tanpa perlu mengkhawatirkan Noise, karena sudah tersedia kabel tertentu penghubung Master Slave yang sudah dirancang untuk tahan terhadap noise pada aplikasi ratusan meter.Noise harus diperhatikan dan diatasi dengan teknik-teknik tertentu jika ingin menerapkan aplikasi pada jarak puluhan bahkan ratusan meter.
Harganya relatif mahal.Harganya relatif murah.