
(Line Tracker/Follower Robot) - te.itny.ac.id file(Line Tracker/Follower Robot) Algoritma Bahasa...
17
Presented by: Asniar Aliyu, ST. M.Eng (Staf Dosen Sekolah Tinggi Teknologi Nasional Yogyakarta) (Line Tracker/Follower Robot)
Transcript of (Line Tracker/Follower Robot) - te.itny.ac.id file(Line Tracker/Follower Robot) Algoritma Bahasa...
Presented by:
Asniar Aliyu, ST. M.Eng(Staf Dosen Sekolah Tinggi Teknologi Nasional Yogyakarta)
(Line Tracker/Follower Robot)
AlgoritmaBahasa
Pemrograman
Program

"Come inside a programmer's brain!"
Teori
pengalaman
Strategi
Algoritma
Bahasa Pemrograman
Program
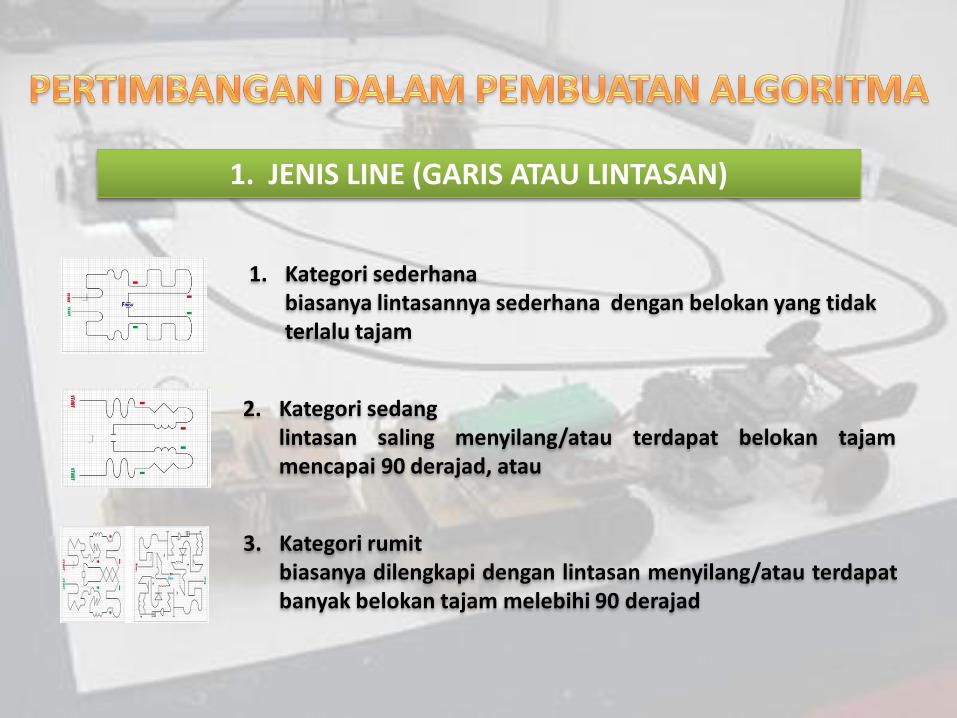
1. JENIS LINE (GARIS ATAU LINTASAN)
1. Kategori sederhanabiasanya lintasannya sederhana dengan belokan yang tidak terlalu tajam
2. Kategori sedanglintasan saling menyilang/atau terdapat belokan tajammencapai 90 derajad, atau
3. Kategori rumitbiasanya dilengkapi dengan lintasan menyilang/atau terdapatbanyak belokan tajam melebihi 90 derajad
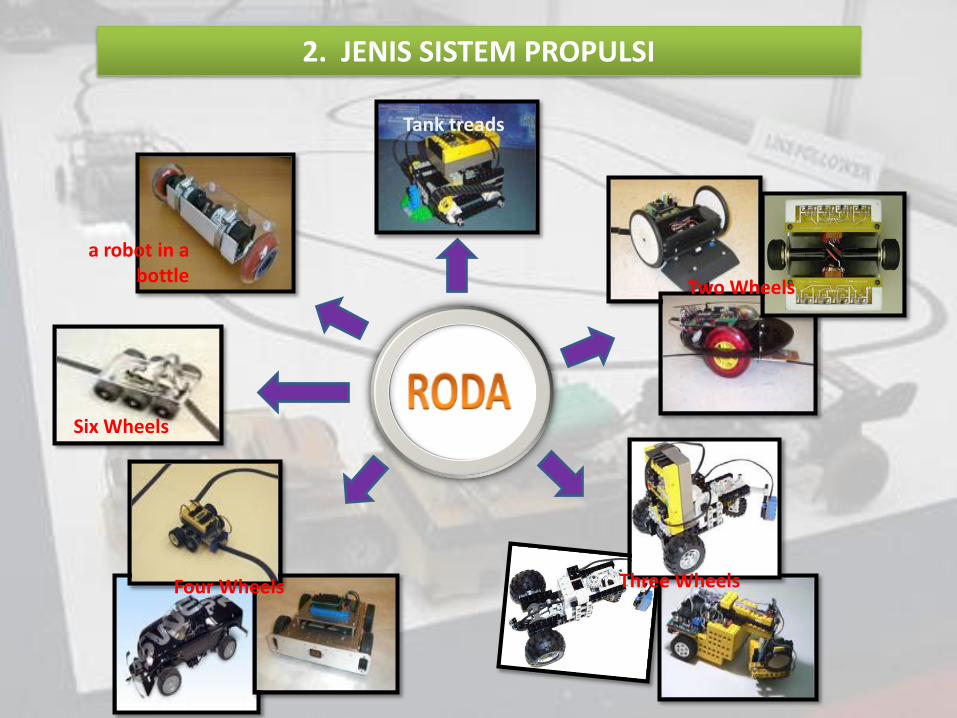
2. JENIS SISTEM PROPULSI
a robot in a bottle
Two Wheels
Three Wheels
Six Wheels
Four Wheels
Tank treads
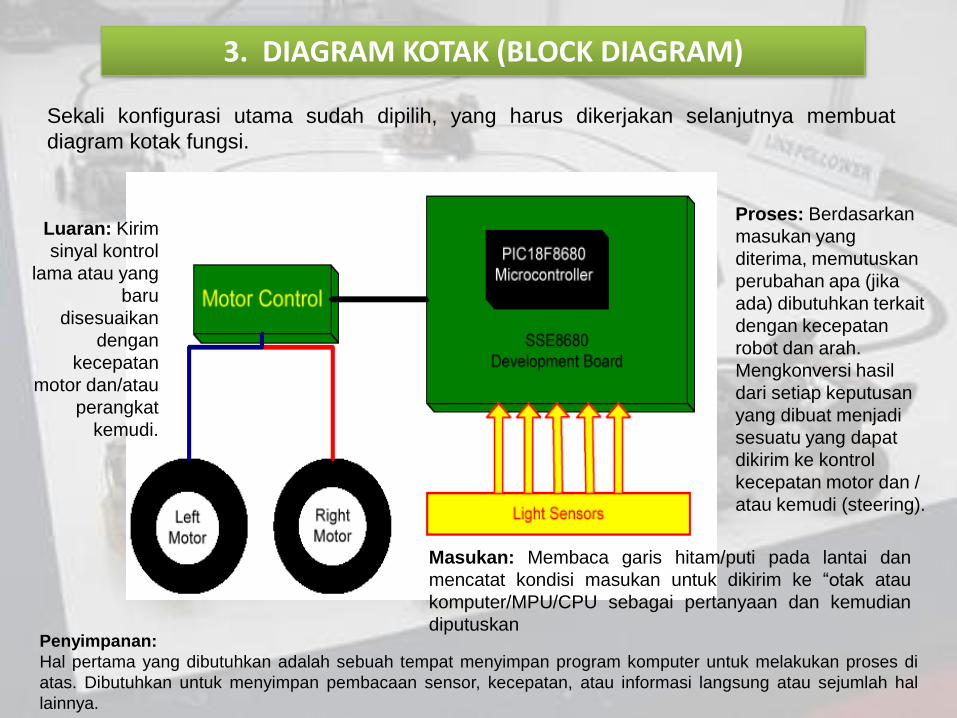
3. DIAGRAM KOTAK (BLOCK DIAGRAM)
Sekali konfigurasi utama sudah dipilih, yang harus dikerjakan selanjutnya membuat
diagram kotak fungsi.
Masukan: Membaca garis hitam/puti pada lantai dan
mencatat kondisi masukan untuk dikirim ke “otak atau
komputer/MPU/CPU sebagai pertanyaan dan kemudian
diputuskan
Proses: Berdasarkan
masukan yang
diterima, memutuskan
perubahan apa (jika
ada) dibutuhkan terkait
dengan kecepatan
robot dan arah.
Mengkonversi hasil
dari setiap keputusan
yang dibuat menjadi
sesuatu yang dapat
dikirim ke kontrol
kecepatan motor dan /
atau kemudi (steering).
Luaran: Kirim
sinyal kontrol
lama atau yang
baru
disesuaikan
dengan
kecepatan
motor dan/atau
perangkat
kemudi.
Penyimpanan:
Hal pertama yang dibutuhkan adalah sebuah tempat menyimpan program komputer untuk melakukan proses di
atas. Dibutuhkan untuk menyimpan pembacaan sensor, kecepatan, atau informasi langsung atau sejumlah hal
lainnya.
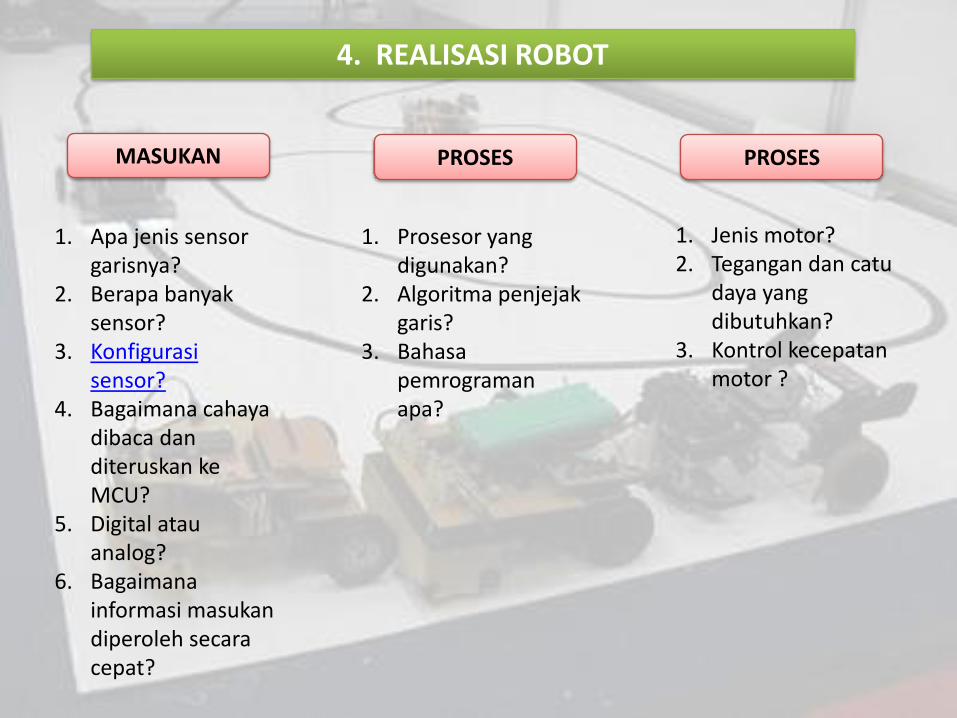
4. REALISASI ROBOT
MASUKAN
1. Apa jenis sensor garisnya?
2. Berapa banyak sensor?
3. Konfigurasi sensor?
4. Bagaimana cahaya dibaca dan diteruskan ke MCU?
5. Digital atau analog?
6. Bagaimana informasi masukan diperoleh secara cepat?
PROSES
1. Prosesor yang digunakan?
2. Algoritma penjejak garis?
3. Bahasa pemrograman apa?
PROSES
1. Jenis motor?2. Tegangan dan catu
daya yang dibutuhkan?
3. Kontrol kecepatan motor ?
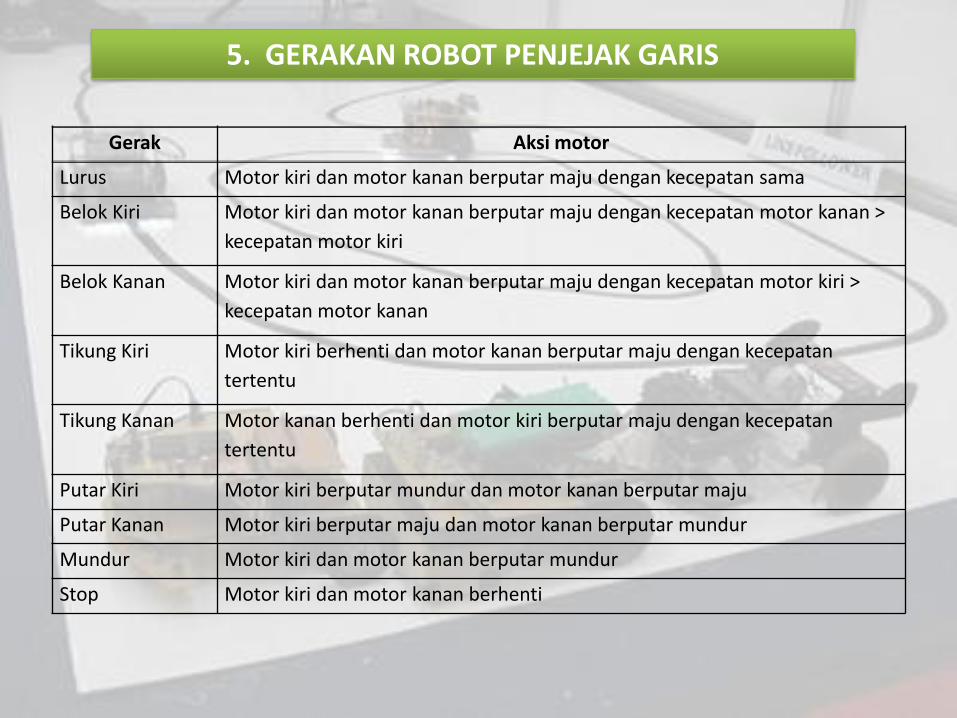
5. GERAKAN ROBOT PENJEJAK GARIS
Gerak Aksi motor
Lurus Motor kiri dan motor kanan berputar maju dengan kecepatan sama
Belok Kiri Motor kiri dan motor kanan berputar maju dengan kecepatan motor kanan >
kecepatan motor kiri
Belok Kanan Motor kiri dan motor kanan berputar maju dengan kecepatan motor kiri >
kecepatan motor kanan
Tikung Kiri Motor kiri berhenti dan motor kanan berputar maju dengan kecepatan
tertentu
Tikung Kanan Motor kanan berhenti dan motor kiri berputar maju dengan kecepatan
tertentu
Putar Kiri Motor kiri berputar mundur dan motor kanan berputar maju
Putar Kanan Motor kiri berputar maju dan motor kanan berputar mundur
Mundur Motor kiri dan motor kanan berputar mundur
Stop Motor kiri dan motor kanan berhenti
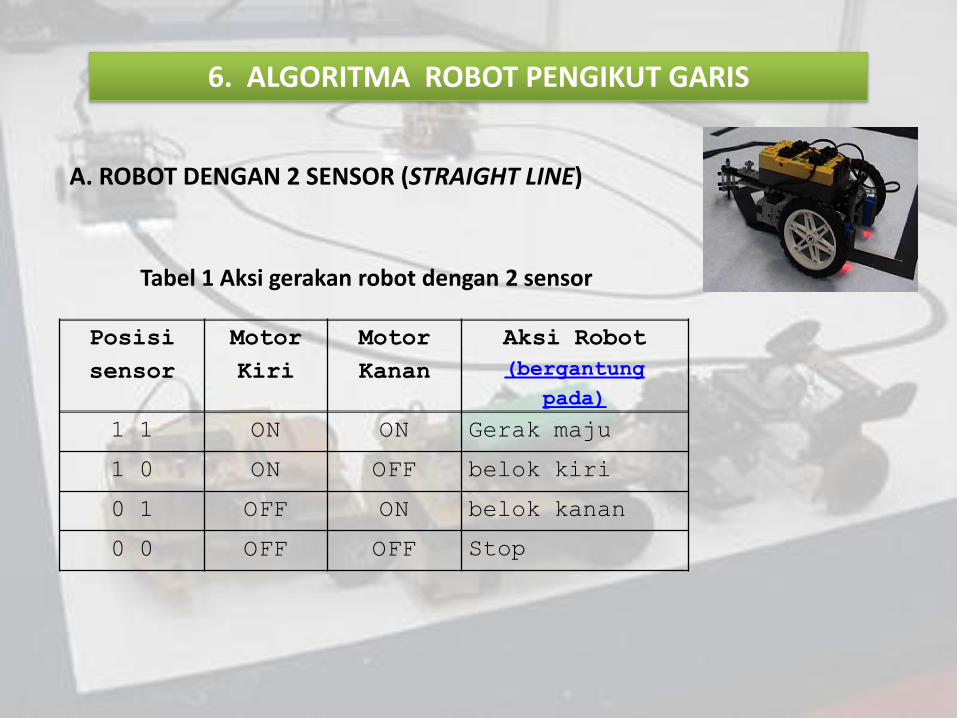
Posisi
sensor
Motor
Kiri
Motor
Kanan
Aksi Robot
(bergantung
pada)
1 1 ON ON Gerak maju
1 0 ON OFF belok kiri
0 1 OFF ON belok kanan
0 0 OFF OFF Stop
6. ALGORITMA ROBOT PENGIKUT GARIS
A. ROBOT DENGAN 2 SENSOR (STRAIGHT LINE)
Tabel 1 Aksi gerakan robot dengan 2 sensor
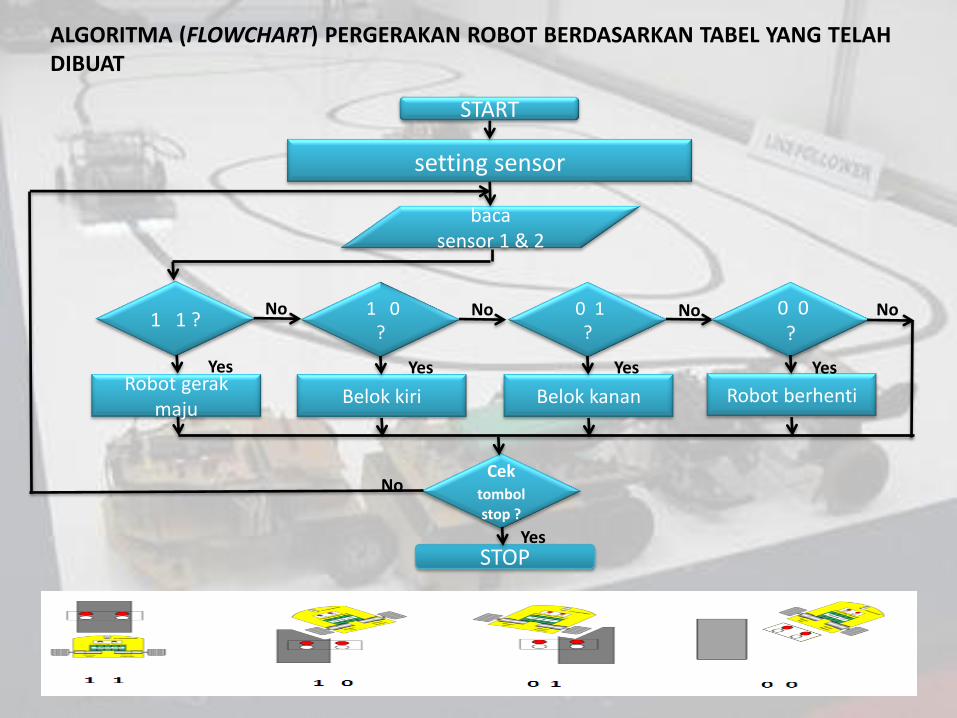
ALGORITMA (FLOWCHART) PERGERAKAN ROBOT BERDASARKAN TABEL YANG TELAHDIBUAT
START
setting sensor
baca sensor 1 & 2
1 1 ?
Robot gerak maju
1 0?
0 1?
0 0?
Belok kiri Belok kanan Robot berhenti
Cek tombol
stop ?
STOP
No
Yes
No
Yes
No No
Yes Yes
No
Yes

B. ROBOT DENGAN 3 SENSOR (STRAIGHT LINE)
Posisi Sensor Motor Kiri Motor Kanan
0 1 0 CW CW
1 1 0 OFF CW
1 0 0 CCW CW
0 1 1 CW OFF
0 0 1 CW CCW
Keterangan:
CW : Clockwise
CCW : Counter Clockwise
Tabel 2 Aksi gerakan robot dengan 3 sensor
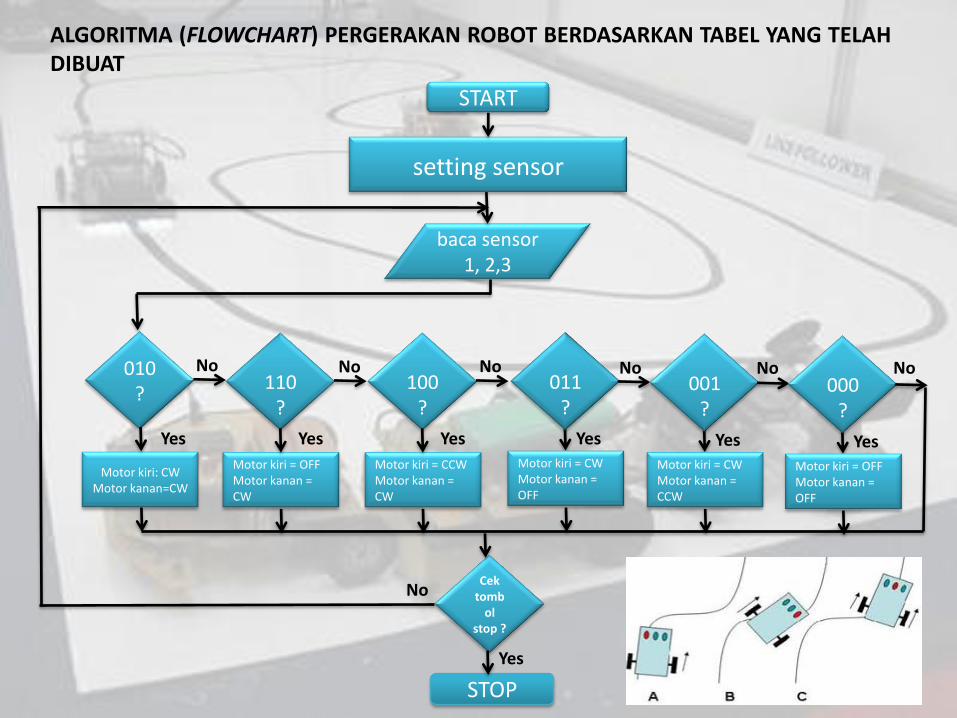
START
setting sensor
baca sensor 1, 2,3
010 ?
Motor kiri: CWMotor kanan=CW
110?
100?
Motor kiri = OFF Motor kanan = CW
Motor kiri = CCWMotor kanan = CW
Cek tomb
ol stop ?
STOP
No
Yes
No
Yes
No
Yes
011?
Motor kiri = CWMotor kanan = OFF
No
Yes
No
Yes
001?
Motor kiri = CWMotor kanan = CCW
No
Yes
000?
Motor kiri = OFFMotor kanan = OFF
No
Yes
ALGORITMA (FLOWCHART) PERGERAKAN ROBOT BERDASARKAN TABEL YANG TELAHDIBUAT
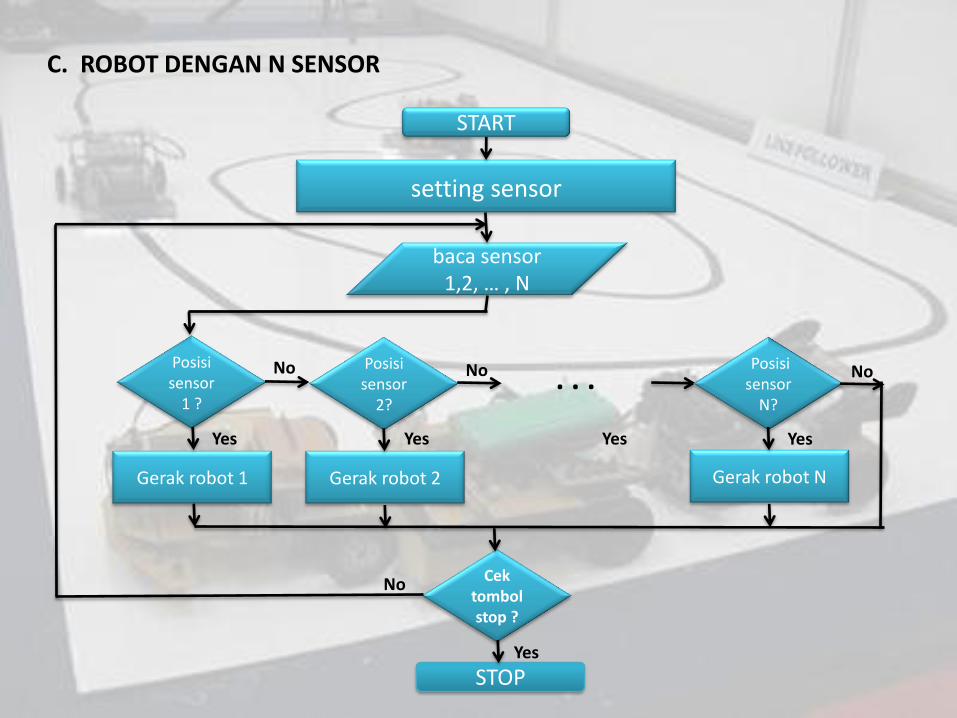
C. ROBOT DENGAN N SENSOR
START
setting sensor
baca sensor 1,2, … , N
Posisi sensor
1 ?
Gerak robot 1
Posisi sensor
2?
Posisi sensor
N?
Gerak robot 2 Gerak robot N
Cek tombol stop ?
STOP
No
Yes
No
Yes
No . . .
Yes Yes
No
Yes
7. PEMROGRAMAN MIKROKONTROLER
Program Dalam Bahasa Basic BASCOM AVR
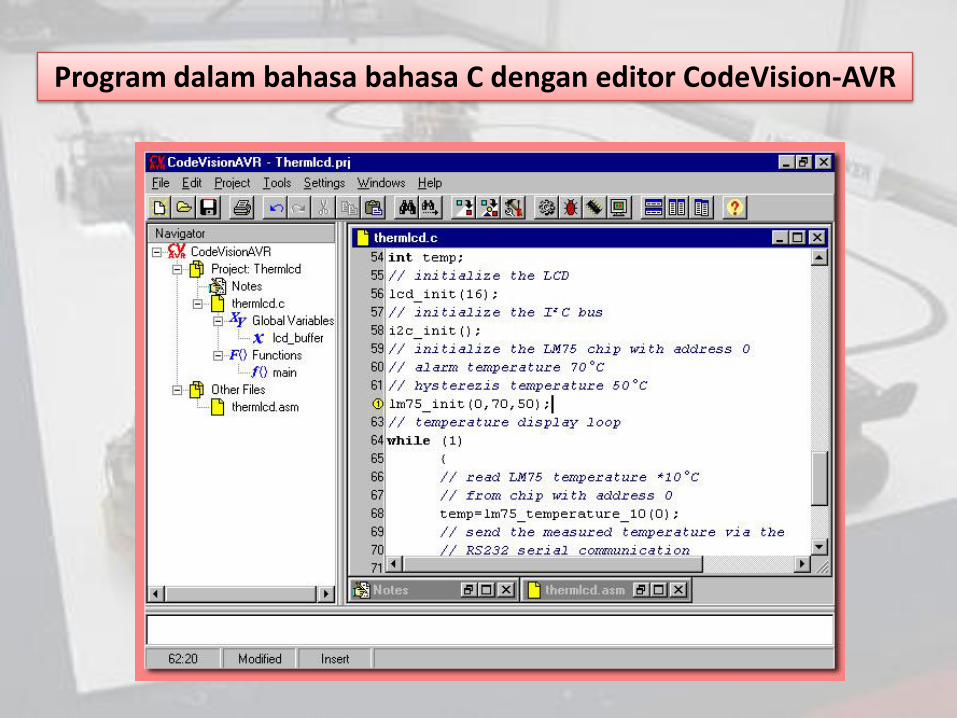
Program dalam bahasa bahasa C dengan editor CodeVision-AVR
Referensi
[1] Richard T. Vannoy II, 2008, Designing and Building a Line Following Robot,
M.S.I.T., B.S.E.E.T.
[2] Taman Pintar, 2014, Buku Panduan Kontes Robot Pintar Yogyakarta 2014
[3] Tugino, Robot Penjejak/Pengikut Garis, makalah presentasi

















