Kontrol Kendali Pid Dengan Dasar Mekanik
10
RANCANGAN ALAT PEMANDU JALAN BAGI KAUM TUNA NETRA DENGAN MENGGUNAKAN SENSOR JARAK TUGAS AKHIR Diajukan untuk melengkapi tugas dan memenuhi syarat memperoleh gelar Ahli Madya RAHMAT 052408028 PROGRAM STUDI DIPLOMA III FISIKA INSTRUMENTASI DEPARTEMEN FISIKA FAKULTAS METEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATERA UTARA MEDAN 2010 Universitas Sumatera Utara
-
Upload
hasan-saya -
Category
Documents
-
view
30 -
download
9
description
sisken
Transcript of Kontrol Kendali Pid Dengan Dasar Mekanik
-
RANCANGAN ALAT PEMANDU JALAN BAGI KAUM TUNA NETRA DENGAN MENGGUNAKAN SENSOR JARAK
TUGAS AKHIR
Diajukan untuk melengkapi tugas dan memenuhi syarat memperoleh gelar Ahli Madya
RAHMAT 052408028
PROGRAM STUDI DIPLOMA III FISIKA INSTRUMENTASI DEPARTEMEN FISIKA
FAKULTAS METEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATERA UTARA
MEDAN
2010
Universitas Sumatera Utara
-
KATA PENGANTAR
Puji dan syukur saya ucapkan kepada Allah SWT yang telah memberikan
karunia dan rahmatnya sehingga penulis menyelesaikan Tugas Akhir ini dengan
baik.
Tugas Akhir ini merupakan sebuah syarat mutlak yang harus penulis
selesaikan untuk memperoleh gelar Ahli Madya pada jurusan Fisika Instrumentasi
di Universitas Sumatera Utara (USU). Adapun judul Tugas Akhir yang penulis
rancang ini adalah RANCANGAN ALAT PEMANDU JALAN BAGI KAUM
TUNA NETRA DENGAN MENGGUNAKAN SENSOR JARAK.
Upaya yang di lakukan penulis dalam menyelesaikan Tugas Akhir ini,
walaupun telah dilakukan semaksimal mungkin, tetapi penulis menyadari masih
jauh untuk tingkat kesempurnaan didalam penyusunan. Oleh sebab itu dengan
kerendahan hati penulis menerima kritik dan saran yang sifatnya membangun
untuk kesempurnaan Tugas Akhir ini.
Didalam hal ini, berbagai masalah yang timbul dalam proses penyelesaian
Tugas Sarjana ini dapat penulis lalui dengan bantuan moril maupun material dari
berbagai pihak. Untuk itu penulis menyampaikan ucapan terimah kasih kepada :
1. Kedua orang tua tercinta,serta kelurga yang telah memberikan bantuan dan
dorongan secara moril dan material.
2. Bapak Drs. Syahrul Humaidi, M.Sc selaku ketua Departemen Fisika
Instrumentasi dan Dosen pembimbing.
Universitas Sumatera Utara
-
3. Bapak DR. Marhaposan Situmorang selaku ketua Departemen Fisika.
4. Ibu Dra. Justinon, M.Sc selaku Sekretaris Departemen Fisika.
5. Bapak-bapak dan Ibu-ibu Dosen Departemen Fisika
6. Kak Dewi dan adik-adik penulis Sri, Rina dan Kiki
7. Rekan-rekan kost jati 2 No. 61, Suyono, Adi, Boby, jendri, Nirwan, Faisal,
Tama, Rido, Fajar, Surya, Sukanda, Kuncoro, Mas Boy, Andi, Ari,
Buyung, Madi, Hendramawan, Boby dan juga teman-teman lain Popon,
Reno, Wirda dan lain-lain.
8. Rekan-rekan mahasiswa Fisika Instrumentasi yang telah membantu dan
mendukung penulis dalam menyelesaikan Tugas Akhir ini.
Akhir kata semoga Tugas Akhir ini dapat memberikan manfaat bagi
pembaca terutama bagi penulis sendiri.
Medan,1 Juni 2010
Penulis
052408028
Rahmat
Universitas Sumatera Utara
-
ABSTRAK
Perkembangan dan kemajuan teknologi yang demikian pesat sangat
membantu manusia dalam segala proses penyelesaian kerjanya, penemuan
penemuan disegala bidang terus berkembang, begitu pula halnya dengan
kemajuan teknologi dalam bidang elektronika yang terus semakin canggi dan
semakin mudah dan efisien.
Dengan adanya teknologi yang semakin canggih tuna netra membutuhkan
alat bantu yang digunakan untuk memandu jalan. Maka dirancang suatu alat
elektronik sebagai pendeteksi dini adanya penghalang. Piranti - piranti yang
dipakai yaitu : penentu jarak adalah sensor ultrasonic (transmitter, receiver) yang
dapat bekerja dengan radius gelombang yang telah ditentukan. Salah satu caranya
adalah dengan menggunakan teknik echo sounder atau pemantulan gelombang
suara. Outputnya akan dikeluarkan dalam bentuk suara semakin dekat jarak
penghalang dengan alat maka semakin besar pula suara yang ditimbulkan.,
Outputnya berupa suara yang akan diolah dalam rangkaian pengolah suara
menggunakan system mikrokontroler AT89S51. Untuk catu dayanya
menggunakan baterai 9 volt. Dari perancangan tersebut menghasilkan adanya
tingkat kesensitivitasan sensor ultrasonik semakin berkurang dengan jarak
penghalang yang semakin jauh serta semakin kecil juga tegangannya.
Frekuensinya adalah 4O KHz.
Pada rancangan alat pemandu jalan bagi kaum tuna netra dengan
menggunakan sensor ultrasonic berbasis mikrokontroler AT89S51 jarak maksimal
yang di ukur adalah 200 cm meter,sedangkan jarak minimal yang dapat diukur
adalah 3 cm.
Universitas Sumatera Utara
-
DAFTAR ISI
halaman
KATAPENGANTAR ..... i
ABSTRAK ... iii
DAFTAR ISI .. iv
DAFTAR GAMBAR .. vii
DAFTAR TABEL ix
BAB I PEDAHULUAN 1
1.1.Latar Belakang Masalah .. 1
1.2.Rumusan Masalah 2
1.3.Batasan Masalah .. 2
1.4.Tujuan Penelitian. 2
1.5. Sistematika Pembahasan 3
BAB II LANDASAN TEORI . 5
2.1 Tranducer Ultrasonic .. 5
2.2 Sensor Jarak 6
2.3 Mikrokontroler AT89S51 8
2.3.1 Kontruksi AT89S51 .. 10
2.3.2 SFR (Register Fungsi Khusus) Pada Keluarga AT89S51 .... 12
Universitas Sumatera Utara
-
2.3.3 Gambar IC Mikrokontroler AT89S51 17
2.4 Power Supply 19
2.5 Komponen Pendukung .. 20
2.5.1 Resistor 20
2.5.2 Kapasitor . 24
2.5.3 Transistor . 28
2.5.4 Dioda ... 33
2.5.5 IC .. 36
BAB III METODOLOGI PENELITIAN .............................. 38
3.1 Bahan penelitian .... 38
3.2 Alat penelian . .. 39
3.3 Diagram Blok Rangkaian . 40
3.4 Rangkaian Sensor ultrasonik ... 42
3.5 Rangkaian Mikro kontroler AT89S51 43
3.6 Rangkaian driver dan buzzer 45
3.7 Catu daya . 46
3.8 Jalannya Penetian 47
3.9 Flowchart .. 48
Universitas Sumatera Utara
-
BAB IV PENGUJIAN DAN ANALISA SISTEM .. 50
4.1 Pengujian Rangkaian Sensor . 50
4.2 Pengujian Rangkaian Mikrokontroler AT89S51 .. 54
4.3 Pengujian Rangkaian Power Supplay ... 56
BAB V KESIMPULAN DAN SARAN 57
5.1 Kesimpulan 57
5.2 Saran .. 57
DAFTAR PUSTAKA
LAMPIRAN
Universitas Sumatera Utara
-
DAFTAR GAMBAR
Halaman
Gambar 2.1. Sensor Jarak .. 6
Gambar 2.2. IC Mikrokontroler AT89S51 17
Gambar 2.3. Resistor Karbon 21
Gambar 2.4. Grafik perubahan nilai potensiometer .. 24
Gambar 2.5. prinsip kapasitor ... 25
Gambar 2.6. Elektrolyt condenser (ELCO) .. 26
Gambar 2.7. Keramik kapasitor 27
Gambar 2.8. Simbol dan tipe transistor . . 29
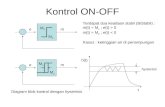
Gambar 2.9. Transistor sebagai saklar ON ... 30
Gambar 2.10. Karakteristik daerah saturasi pada transistor .... 31
Gambar 2.11 Transistor sebagai saklar OFF 32
Gambar 2.12. Simbol dioda . 33
Gambar 2.13. Sifat dioda jika di beri bias maju dan bias mundur ... 34
Gambar 2.14. Dioda penyearah (rectifier) yang berisi arus bolak balik (AC).. 35
Gambar 2.15. Simbol dioda zener 36
Gambar 2.16 IC LM7805 37
Universitas Sumatera Utara
-
Gambar 3.1. Diagram blok rangkaian .. 40
Gambar 3.2 diagram rangkaian mikrokontroler AT89S51 .. 41
Gambar 3.3. Rangkaian sensor ........ 42
Gambar 3.4. Rangkaian minimum mikrokontroler AT89S51 . 44
Gambar 3.5. Rangkaian driver dan buzzer ...... 45
Gambar 3.6. Rangkaian catu daya 46
Gambar 4.2. Diagram waktu sensor DT-USSIR .. 51
Gambar 4.1. Ilustrasi cara kerja sensor ... 51
Gambar 4.3 Grafik Waktu vs Jarak 54
Universitas Sumatera Utara
-
DAFTAR TABEL
Halaman
Tabel 2.1. Fungsi khusus SFR (special function register) 13
Tabel 2.2. Fungsi pin pada port 3 . 18
Tabel 2.3. Kode warna . 22
Tabel 2.4. Nilai kapasitor . 28
Table 4.1. hasil perhitungan 53
Universitas Sumatera Utara