Kontrol Flow Fix
42
Laporan Akhir Instrumentasi dan Kontrol Unit Kontrol Flow Tgl Percobaan UNIT KONTROL FLOW PENGAWAS PRAKTIKUM 2009 Kusyanto , SST ACC, Tgl NIP. BAB I PENDAHULUAN 1.1 Latar Belakang Pengendalian proses pada umumnya adalah usaha untuk mencapai tujuan proses agar tercapai kondisi optimal, proses berjalan sesuai dengan yang kita inginkan. Proses tidak perlu dikendalikan jika memang tujuan proses tercapai tanpa unsur pengendalian. Contoh sederhana adalah untuk mempertahankan suhu air pada tekanan 1 atm. Sebaliknya proses perlu dikendalikan jika untuk mencapai tujuan proses perlu pengawasan terus – menerus. Contoh sederhana adalah mempertahankan suhu air pada 40 o C dalam udara yang bersuhu kamar dan tekanan normal. Proses perlu dikendalikan dikarenakan oleh beberapa hal. Diantaranya untuk keamanan operasi, kondisi Politeknik Negeri Samarinda 1
-
Upload
lovemeeverafter -
Category
Documents
-
view
316 -
download
7
Transcript of Kontrol Flow Fix

Laporan Akhir Instrumentasi dan KontrolUnit Kontrol Flow
Tgl Percobaan
UNIT KONTROL FLOW
PENGAWAS PRAKTIKUM
2009 Kusyanto , SST
ACC, Tgl
NIP.
BAB I
PENDAHULUAN
1.1 Latar Belakang
Pengendalian proses pada umumnya adalah usaha untuk mencapai tujuan
proses agar tercapai kondisi optimal, proses berjalan sesuai dengan yang kita
inginkan. Proses tidak perlu dikendalikan jika memang tujuan proses tercapai tanpa
unsur pengendalian. Contoh sederhana adalah untuk mempertahankan suhu air pada
tekanan 1 atm. Sebaliknya proses perlu dikendalikan jika untuk mencapai tujuan
proses perlu pengawasan terus – menerus. Contoh sederhana adalah mempertahankan
suhu air pada 40 oC dalam udara yang bersuhu kamar dan tekanan normal.
Proses perlu dikendalikan dikarenakan oleh beberapa hal. Diantaranya
untuk keamanan operasi, kondisi operasi, dan faktor ekonomi. Pada dasarnya, untuk
faktor ekonomi, terdapat 3 hal yang mempengaruhinya, yaitu :
Biaya operasional yang rendah.
Keuntungan yang besar.
Dapat diterima oleh pasar secara luas.
Pengendalian proses merupakan bagian dari pengendalian automatik yang
diterapkan di bidang teknologi proses untuk menjaga kondisi proses sesuai yang
diharapkan. Seluruh komponen yang terlibat dalam pengendalian disebut sistem
kontrol
Politeknik Negeri Samarinda 1

Laporan Akhir Instrumentasi dan KontrolUnit Kontrol Flow
1.2 Tujuan Percobaan
Adapun tujuan dari percobaan ini adalah :
Mengenal peralatan yang digunakan dalam kontrol flow
Mengetahui pronsip kerja dari sensor dan identifikasi jenis.
Mengamati prinsip kerja sistem kontrol flow.
Mengamati respon dari mode pengendalian proportional
proportional integral, dan proportional integral derivatif.
Politeknik Negeri Samarinda 2

Laporan Akhir Instrumentasi dan KontrolUnit Kontrol Flow
BAB II
DASAR TEORI
Sistem proses adalah rangkaian operasi yang menangani konversi material
dan/atau energy sehingga material dan/atau energy itu berada dalam keadaan yang
diinginkan. Keadaan itu dapat berupa besaran fisika atau kimia, seperti suhu, tekanan,
laju alir, tinggi permukaan cairan, komposisi, pH, dan sebagainya. Pengertian sistem
proses di sini sudah mencakup bahan dan alur proses beserta peralatannya. Sengaja tidak
membedakan sistem proses dan pemroses. Sebab kata “sistem” mengandung pengertian
seluruh komponen yang terlibat dalam suatu proses.
Pengendalian proses pada dasarnya adalah usaha untuk mencapai tujuan proses
agar berjalan sesuai dengan apa yang diinginkan. Pengendalian proses sendiri bisa
diperlukan bisa pula tidak. Proses tidak perlu dikendalikan jika memang tujuan proses
tercapai tanpa unsure pengendalian. Contoh sederhana adalah mempertahankan suhu air
pada 100°C pada tekanan 1 atm. Sebaliknya, proses perlu dikendalikan jika untuk
mencapai tujuan perlu pengawasan terus-menerus. Contoh sederganan adalah
mempertahankan suhu air pada 40°C dalam udara yang bersuhu kamar dan tekanan
normal.
Setiap pabrik harus beroperasi pada suhu tertentu. Berkaitan dengan hal itu
terdapat tiga alasan mengapa perlu pengendalian proses.
Keamanan Operasi
Beberapa sitem proses di pabrik memiliki kondisi operasi yang berbahaya. Untuk
mencegah kecelakaan karena kondisi maksimum terlampaui diperlukan
pengendalian tergadap beberapa variable uang menjadi potensi bahaya.
Kondisi Operasi
Pada operasi atau reaksi tertentu diperlukan kondisi tertentu pula. Pengendalian
diperlukan agar proses beroperasi secara optimal.
Faktor Ekonomi
Politeknik Negeri Samarinda 3

Laporan Akhir Instrumentasi dan KontrolUnit Kontrol Flow
Pabrik didirikan adalah untuk menghasilkan uang. Sehingga produk akhir harus
sesuai dengan perminyaan pasar. Prinsipnya bukan kualitas produk terbaik yang
diharapkan, tetapi kualitas yang dapat diterima pasar dengan biaya operasional
rendah sehingga menghasilkan untung sebesar-besarnya. Kualitas sangat bagus
tetapi memerlukan biaya operasional yang tinggi, sehingga harga jual menjadi
mahal dan tidak laku di pasar sudah barang tentu tidak diharapkan. Atas dasar itu
peranan pengendalian proses adalah membuay kondisi operasi agar menghasilkan
produk yang sesuai permintaan pasar.
2.1 Sistem Pengendalian
2.1.1 Definisi
Pengendalian proses adalah bagian dari pengendalian automatic yang
diterapkan di bidang teknologi proses untuk menjaga kondisi proses agar sesuai
yang diinginkan. Seluruh komponen yang terlibat dalam pengendalian proses
disebut sistem pengendalian atau sistem control.
2.1.2 Jenis Variabel
Jenis variable yang mendapatkan perhatian penting dalam bidang
pengendalian proses adalah variable proses (process variable, PV) arau diesebut
juga variable terkendali (controlled variable). Variable proses adalah besaran fisik
atau kimia yang menunjukkan keadaan proses. Bariabel ini bersifat dinamik.
Artinya, nilai variable dapat berubah spontan atau oleh sebab lain baik yang
diketahui maupun tidak. Di antara banyak macam variable proses, terdapat empat
macam variable dasar, yaitu suhu (T), tekanan (P), laju alir (F), dan tinggi
permukaan cairan (L).
Dalam teknik pengendalian proses, titik berat permasalahan adalah
menjaga agar variable proses tetap atau berubah mengikuti alur (trayektori)
tertentu. Variable yang digunakan untuk melakukan koreksi atau mengendalikan
variable proses disebut variable termanipulasi (manipulated variable, MV) atau
variable pengendali. Sedangkan nilai yang diinginkan dan dijadikan acuan atau
referensi variable proses disebut nilai acuan (setpoint,SV). Selain ketiga jenis
Politeknik Negeri Samarinda 4

Gangguan Terukur
Gangguan Tak Terukur
Variabel Terkendali
Variabel Termanipulasi
Variabel Tak Terkendali
Laporan Akhir Instrumentasi dan KontrolUnit Kontrol Flow
variable ersebut masih terdapat variable lain yaitu gangguan (disturbance) baik
yang terukur (measured disturbance) maupun tidak terukur (unmeasured
disturbance) dan variable keluaran tak terkendali (uncontrolled output variable).
Variable gangguan adalah variable masukan yang mampu mempengaruhi nilai
variable proses tetapi tidak digunakan untuk mengendalikan. Variable keluaran
tak terkendali adalah variable keluaran yang tidak dikendalikan secara langsung.
(gambar 1 : jenis variable dalam sistem proses)
2.2 Jenis Sistem Pengendalian
2.2.1 Sistem pengendalian simpal terbuka dan tertutup.
Berdasar atas ada atau tidak adanya umpan balik, sistem pengendalian
dibedakan atas sistem pengendalian simpal terbuka (open loop control system)
dan sistem pengendalian simpal tertutup (close loop control system).
Sistem pengendalian simpal terbuka bekerja tanpa membandingkan
variable proses yang dihasilkan dengan nilai acuan yang diinginkan. Sistem ini
semata-mata bekerja atas dasar masukan yang telah dikalibrasi. Sebagai contoh
sederhana adalah keran air yang terkalibrasi. Dengn memandang keran sebagai
suatu sistem, maka bukaan keran (atau sudut bukaan keran) adalah sebagai
masukan dan laju alir air sebagai keluaran sistem. Berdasar hokum dinamika
fluida, laju alir air tergantung pada beda tekanan yang melintas keran. Misal pada
posisi keran x1 dengan beda tekanan P2 mengalir air pada laju Q2 (gambar 1.2).
Jika oleh suatu sebab tertentu tiba-tiba beda tekanan berubah menjadi P1, maka
Politeknik Negeri Samarinda 5
SISTEM PROSES

Laporan Akhir Instrumentasi dan KontrolUnit Kontrol Flow
pada posisi keran tetap x1 akan menghasilkan laju alir Q1. Dengan demikian
sistem pengendalian simpal terbuka tidak dapat mengatasi perubahan beban atau
gangguan yang terjadi.
Meskipun dari uraian di atas, sistem sistem yang buruk, karena tidak
mampu mengatasi gangguan, tetapi memiliki keuntungan sebagai berikut :
Lebih murah dan sederhana disbanding sistem simpal tertutup.
Jika sistem mampu mencapai kestabilan sendiri, maka akan tetap
stabil.
Untuk mengatasi kekurangan sistem simpal terbuka, seorang operator
pabrik akan mengatur kembali besarnya gangguan agar diperoleh sasaran yang
diinginkan . tetapi dengan tindakan operator ini berarti telah membuat sistem
simpal tertutup.
Berbeda dengan sistem simpal terbuka, pada sistem pengendalian simpal
tertutup terdapat tindakan membandingkan nilai variable proses dengnan nilai
acuan yang diinginkan. Perbedaan itu digunakan untuk melakukan koreksi
sedemikian rupa sehingga nilai variable proses sama atau dekat dengan nilai
acuan. Dengan demikian terdapat mekanisme umpan balik. Sehingga sistem
pengendalian simpal tertutup lebih dikenal dengan sistem pengendalian umpan
balik.
Meskipun sistem simpal tertutup mampu mengatasi gangguan atau
perubahan beban, tetapi memiliki kelemahan sebagai berikut :
Lebih mahal dan kompleks disbanding simpal terbuka.
Dengan membuat sistem tidak stabil, meskipun sebenarnya tanpa
umpan balik sistem dapat mencapai kestabilan sendiri.
2.2.2 Sistem Pengaturan dan Pengendalian
Berdasarkan nilai acuan, sistem pengendalian umpan balik dibedakan atas
dua jenis , yaitu sistem pengendalian dengan nilai acuan tetap (di bidang elektro
sering di sebut sistem pengaturan) dan sistem pengendalian dengan nilai acuan
Politeknik Negeri Samarinda 6

Laporan Akhir Instrumentasi dan KontrolUnit Kontrol Flow
berubah (di bidang mekanik sering disebut sistem pengendalian, sistem servo,
atau tracking).
Tujuan utama sistem pengaturan adalah mempertahankan agar nilai
variable proses tetap pada nilai yang diinginkan. Sedangkan pada sistem
pengendalian, tujuan utamanya adalah mempertahankan agar nilai variable proses
agar selalu mengikuti perubahan nilai acuan.
Di bidang teknologi proses termasuk teknik kimia, meskipun hampir
semuanya bekerja dengan titik acuan tetap, tetapi lebih popular dengan istilah
sistem pengendalian dan bukan sistem pengaturan. Hal ini disebabkan karena
istilah pengendlaian lebih mencerminkan kondsi dinamik.
2.3 Sistem Pengendalian Umpan Balik
Prinsip mekanisme kerja sistem pengendalian umpan balik adalah mengukur
variable proses dan kemudian melakukan koreksi bila nilainya tidak sesuai dengan yang
diinginka. Cirri utama pengendalian umpan balik adalah adanya umpan balik negative.
Artinya, jika nilai variable proses berubah, terdapat umpan balik yang melakukan
tindakan untuk memperkecil perubahan itu.
2.4 Langkah Pengendalian
Selengkapnya, langkah pengendalian umpan balik adalah sebagai berikut:
Mengukur. Tahap pertama dari langkah pengendaluan adalah mengukur
atau mengamati nilai variable proses.
Membandingkan. Hasil pengukuran atau pengamatan variable proses (nilai
terukur) dibandingkan dengan nilai acuan (setpoint).
Mengevaluasi. Perbedaan antara nilai terukur dan nilai acuan dievaluasi
untuk menentukan langkah atau cara melakukan koreksi atas perbedaan itu.
Mengoreksi. Tahap ini bertugas melakukan koreksi variable proses, agar
perbedaan antara nilai terukur dan nilai acuan tidak ada atau sekecil
mungkin.
2.5 Instrumentasi Proses
Politeknik Negeri Samarinda 7

Laporan Akhir Instrumentasi dan KontrolUnit Kontrol Flow
Pelaksanaan keempat langkah pengendalian memerlukan instrumentasi berikut.
a) Unit pengukuran. Bagian ini bertugas mengubah nilai variable proses
berupa besaran fisik atau kimia seperti lajua alir, tekanan, suhu, pH,
konsentrasi, dan sebagainya, menjadi sinyal standar. Bentuk sinyal standar
yang popular di bidang pengendalian proses adalah berupa sinyal pneumatic
(tekanan udara) dan sinyal listrik.
Unit pengukuran terdiri atas duan baian besar yaitu sensor dan transmitter.
Sensor adalah elemen perasa yang langsung “bersentuhan” dengan
variable proses.
Transmitter yaitu bagian yang berfungsi mengubah sinyal yang dari
sensor (gerakan mekanik, perubahan hambatan, perubahan tegangan
atau arus) menjadi suatu sinyal standar.
Dalam bidang pengendalian proses istilah transmitter lebih popular
dibandingkan dengan transducer. Meskipun keduanya berfungsi
serupa, tetapi transmitter mempunyai makna pengirim sinyal
pengukuran ke unit pengendali yang biasnya teletak jaug dari tempat
pengukuran. Ini lebih sesuai dengan keadaan sebenarnya di pabrik.
b) Unit pengendali. Bagian ini berugas membandingkan, mengevaluasi, dan
mengirimkan sinyal ke unit kendali akhir. Evaluasi yang dilakukan berupa
operasi matematika seperti, penjumlahan, pengurangan, perkalian,
pembagian, integrasi dan diferensiasi. Hasil evaluasi berupa sinyal kendali
yang dikirim ke unit kendali akhir. Sinyal kendali berupa sinyal standar
yang serupa dengan sinyal pengukuran.
c) Unit kendali akhir. Bagian ini bertugas menerjemahkan sinyal kendali
menjadi aksi atau tindakan koreksi melalui pengaturan variable
termanipulasi. Unit ini terdiri atas dua bagian besar, yaitu actuator dan
elemen kendali akhir. Actuator adalah penggerak elemen kendal akhir
bagian ini dapat berupa motor listrik, solenoid, atau membrane pneumatic.
Sedangkan elemen kendali akhir biasanya berupa katup kendali (control
valve) atau elemen pemanas.
Politeknik Negeri Samarinda 8

Laporan Akhir Instrumentasi dan KontrolUnit Kontrol Flow
2.6 Diagram Blok
Penggambaran suatu sistem atau komponen dari sistem dapat berbentuk blok
(kotak) yang dilengkapi dengan garis sinyal masuk dan keluar. Sinyal dapat berupa arus
listrik, tegangan (voltase) tekanan, aliran cairan, tekanan cairan, suhu, pH, kecepatan,
posisi, dan sebagainya. Sinyal yang perlu digambarkan hanyalah sinyal masuk dan
keluara yang secara langsung berperan dalam sitem. Sedangkan sumber energy atau
massa yang masuk biasanya tidak digambarkan.
Sebagai contoh, keran air yang dipaki mengalirkan air dari tangki. Cadangan air
sebagai sumber massa. Sinyal masukan adalh sudut putar keran (posiisi bukaan keran).
Sinyal keluar adalah laju alir air. Di sini ang perlu digambarkan adalah sudut putar (posisi
bukaan keran) dan laju alir air. Sedangkan cadangan air tidak perlu digambarkan.
Gambar 2 : Diagram blok pengaturan laju air dengan keran
Gambaran umum diagram blok sistem adalah sebagai berikut :
Berikut contoh diagram blok sistem :
Politeknik Negeri Samarinda 9
KERANSUDUT PUTAR
LAJU ALIR
SISTEMMASUKAN KELUARAN
TERMOMETER RAKSA
SUHU TEGANGAN
TINGGI RAKSA
TRANSMITTER TEKANAN
TEKANAN SUHU
ARUS
PENUKAR PANAS
ALIRAN PEMANAS
KELUARAN

Laporan Akhir Instrumentasi dan KontrolUnit Kontrol Flow
2.7 Diagram Blok Sistem pengendalian
Dengan meninjau alat penukar panas (dari contoh sebelumnya) sebagai suatu
sistem, maka dapat dibuat diagram blok sebagai berikut :
Gambar 3 : diagram blok sistem pemanasan air
Diagram blok umum sistem terdapat masukan sistem yang terdiri atas variable
termanipulasi (m) dan gangguan (w). Tanda bulatan yang menjadi titik temu keduanya
adalah symbol penjumlahan. Berikut merupakan gambar diagram blok umum sistem
proses.
Politeknik Negeri Samarinda 10
TERMOKOPELSUHU KELUARAN
SISTEM PROSES PEMANASAN
AIR
VARIABEL TERMANIPULASI
VARIABEL PROSES
GANGGUAN
w

Laporan Akhir Instrumentasi dan KontrolUnit Kontrol Flow
Keterangan :
m : variable termanipulasi (MV)
w : variable gangguan
c : variable proses (PV)
Diagram blok lengkap sistem pengendalian proses pemanasan dapat digambarkan
sebagai berikut :
Keterangan gambar :
r : nilai acuan atau setpoint value (SV)
e : sinyal galat (error) dengan e = r – y
y : sinyal pengukuran
u : sinyal kendali
m : variable termanipulasi (MV)
w : variable gangguan
c : variable proses
GV : katup pengendali
GC : pengendali
Politeknik Negeri Samarinda 11
SISTEM PROSES
m c
GC GV GP
H
ur e m
w
c
-
y
+ ++

Laporan Akhir Instrumentasi dan KontrolUnit Kontrol Flow
GP : sistem proses
H : transmitter
Untuk keperluan praktis sering diagram tersebut disederhanakan dengan
meniadakan blok katup kendali dan transmitter. Hal ini disebabkan karena sinyal kendali
(u) pada dasarnya mempresentasikan nilai variable proses. Sehingga dalam diagram blok
sistem pengendalian pada gambar berikut, sinyal kendali (u) sebagai variable
termanipulasi (MV).
2.8 Tanggapan transien sistem tertutup
Sistem pengendalian dapat lebih disederhanakan, yaitu dengan memandang
sistem sebagai satu blok dengan dua masukan (r dan w) dan satu keluaran (y).
Gambar 4 : penyederhanaan sistem pengendalian sebagai satu blok
Jika ke dalam sistem pengendalian terjadi perubahan nilai acuan, idealnya, nilai
variable proses tepat mengikuti nilai acuan baru. Tetapi kondisi demikian biasanya tidak
terjadi. Nilai variable proses akan mengalami beberapa kemungkinan perubahan, yaitu :
a) Tanpa osilasi (overdamped)
b) Osilasi teredam (underdamped)
Politeknik Negeri Samarinda 12
GC GPre
m
w
c-
y
++
+
SISTEM PENGENDALIAN
r
wy

Laporan Akhir Instrumentasi dan KontrolUnit Kontrol Flow
c) Osilasi kontinu (sustained oscillation)
d) Tidak stabil (amplitudo membesar)
Keempat tanggapan di atas dibuat dengan member masukan berupa step function
(fungsi undak) yaitu dengan perubahan mendadak dari satu nilai masukan konstan ke
nilai masukan konstan yang lain. Besarnya perubahan tersebut biasanya paling besar
10%.
Tanggapan tanpa osilasi bersifat lambat namun stabil. Sedangkan tanggapan
osilasi teredam mengalami sedikit gelombang di awal perubahan, dan selanjutnya
amplitudo mengecil dan akhirnya hilang. Tanggapan ini cukup cepat meskipun sedikit
mengalami ketidakstabilan. Pada tanggapan dengan osilasi kontinu, variable proses
secara terus menerus bergelombang dengan amplitude dan frekuensi tetap. Teakhir,
tanggapan tidak stabil, memiliki amplitude membesar. Kondisi demikian sangat
berbahaya karena dapat merusak sistem keseluruhan.
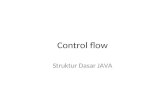
Tanggapan teredam (ζ > 1) Tanggapan osilasi teredam (0 < ζ <1)
Tanggapan osilasi kontinu (ζ = 0) Tidak stabil ( ζ < 0)
Gambar 5 : tanggapan sistem pengendalian simpal tertutup pada peubahan nilai acuan
Politeknik Negeri Samarinda 13

Laporan Akhir Instrumentasi dan KontrolUnit Kontrol Flow
Dari keempat kemungkinan tadi, yang paling dihindari bahkan sama sekali tidak
boleh terjadi adalah tanggapan tidak stabil dengan amplitude membesar. Sedangkan
tanggapan osilasi kontinu dalam beberapa hal masih bisa diterima, meskipun cukup
berbahaya.
Sekedar perhatian untuk praktisi industry, meskipun variable proses secara terus
menerus terlihat berayun seperti mengalami osilasi kontinu, tetapi belum tentu benar –
benar terjadi osilasi dalam sistem pengendalian. Boleh jadi kondisi demikian memang
sifat variable itu sendiri, misalnya aliran gas atau turbulensi fluida.
2.9 Tujuan pengendalian
2.9.1 Hakikat utama
Hakikat utama tujuan pengendalian proses adalah mempertahankan nilai
variable proses agar sesuai dengan kebutuhan operasi. Makna dari pernyataan ini
adalah, satu atau beberapa nilai variable proses mungkin perlu dikorbankan
semata – mata untuk mencapai tujuan yang lebih besar, yaitu kebutuhan operasi
keseluruhan agar berhalan sesuai yang diinginkan.
2.9.2 Tujuan Ideal dan praktis
a) Tujuan ideal adalah mempertahankan nilai variable proses agar
sama dengan nilai acuan
b) Tujuan praktis adalah mempertahankan nilai variable proses di
sekitar nilai acuan dalam batas- batas yang ditetapkan.
Tujuan pengendalian erat berkaitan dengan kualitas pengendalian yang
didasarkan atas bentuk tanggapan variable proses. Setelah terjadi perubahan nilai
acuan (setpoint) atau beban diharapkan :
a) Penyimpangan maksimum dari nilai acuan sekecil mungkin
(minimum overshoot).
b) Waktu yang diperlukan oleh variabel proses mencapai kondisi
mantap sekecil mungkin (Minimum settling time).
Politeknik Negeri Samarinda 14

Laporan Akhir Instrumentasi dan KontrolUnit Kontrol Flow
c) Perbedaan nilai acuan dan variable proses setelah tunak sekecil
mungkin (Minimum offset).
Dengan kata lain kualitas pengendalian yang diharapkan adalah :
a) Tanggapan cepat
b) Hasilnya stabil, dan tidak ada penyimpangan dengan nilai acuan.
Gambar 6 : tanggapan sistem pengendalian simpal tertutup pada perubahan beban
2.10 Kriteria kualitas pengendalian
Evaluasi kinerja sistem pengendalian memerlukan dua hal, yaitu jenis tes dan
criteria yang tepat. Jenis tes yang paling sering dipakai adalah dengan cara mengubah
nilai acuan atau beban secara mendadak (step response test). Dari hasil tes selanjutnya
dihitung apakah memenuhi criteria atau tidak. Kriteria yang paling umum dipakai di
industry adalah :
a) Kriteria redamam seperempat amplitude (quarter amplitude decay ratio)
Politeknik Negeri Samarinda 15
Maximum error (overshoot)
Beban
Variabel Proses
Settling time
Offset

Laporan Akhir Instrumentasi dan KontrolUnit Kontrol Flow
Kriteria ini merupakan kriteria popular di kalangan praktisi dan teoritis,
sebab mampu mengakomodasikan ketiga kualitas pengendalian
sebagaimana sudah disebutkan. Maksud kriteria redaman seperempat
amplitude adalah, amplitudo puncak berikutnya memiliki nilai seperempat
dari puncak amplitudo sebelumnya. Atau decay ratio sebesar 0,25.
b) Kriteria redaman kritik
Kriteria ini dipakai jika overshoot diatas nilai acuan tidak diperkenankan.
Kondisi redaman kritik merupakan batas osilasi teredam. Tanggapan pada
redaman kritik adalah paling cepat dan tanpa overshoot.
c) Kriteria nilai minimum dari integral galat absolut
Kriteria integral galat absolut menunjukkan luas total galat.
2.11 Jenis Pengendalian Umpan Balik
Prinsip mekanisme kerja sistem pengendalian umpan balik adalah mengukur
variabel proses dan kemudian melakukan koreksi bila nilainya tidak sesuai dengan yang
diinginkan. Ciri utama pengendalian umpan balik adalah adanya umpan balik negatif.
Artinya, jika nilai variabel proses berubah, terdapat umpan balik yang melakukan
tindakan memperkecil perubahan itu.
2.11.1 Pengendalian Discontinue
Pengendali 2 posisi
Pengendali yang hanya terdiri dari 2 posisi saja yaitu ON dan OFF
Pengendali 3 posisi
Jenis pengendali yang desainnya mudah dan murah. Keluaran
pengendali memiliki kemunggkinan nilai yaitu pada posisi
maximum (100 %), pertengahan (50 %) dan minimum (0 %).
2.11.2 Pengendali Continue
a) Pengendali Proporsional (P)
Controller proporsional memiliki keluaran yang sebanding
/proporsional dengan besarnya sinyal kesalahan (selisih antara
besaran yang diinginkan dengan harga aktualnya) [Sharon, 1992,
Politeknik Negeri Samarinda 16

Laporan Akhir Instrumentasi dan KontrolUnit Kontrol Flow
19]. Secara lebih sederhana dapat dikatakan, bahwa keluaran
controller proporsional merupakan perkalian antara konstanta
proporsional dengan masukannya. Perubahan pada sinyal masukan
akan segera menyebabkan system secara lengsung mengubah
keluarannya sebesar konstanta pengalinya.
Persamaan pengendali proporsional
Dimana : U = Keluaran pengendali, sinyal kendali
KC = Proporsional gain
e = Galat, error
UO = Bias pada saat e = 0
Controller proporsional memiliki 2 parameter, pita proporsional
(proporsional band/PB) dan konstanta proporsional (KC), daerah
kerja controller efectif dicerminkan oleh pita proporsional
[Gunterus, 1994, 6-24], sedangkan konstanta proporsional
menunjukkan nilai factor penguatan terhadap sinyal kesalahan, KC.
Hubungan antara pita proporsional (PB) dengan konnstanta
proporsional (KC) ditunjukkan secara prosentase oleh persamaan
berikut :
Tiga sifat pengendali proporsional :
Keluaran pengendali sebanding dengan besarnya error
Politeknik Negeri Samarinda 17

Laporan Akhir Instrumentasi dan KontrolUnit Kontrol Flow
Tanggapan sinyal kendali terjadi seketika tanpa ada pergeseran
fase
Pada perubahan beban selalu menghasilkan offset
Ciri-ciri controller proporsional berdasarkan nilainya :
Jika nilai Kc kecil, controller proporsional hanya mampu
melakukan koreksi kesalahan yang kecil, sehingga akan
menghasilkan respon system yang lambat
Jika nilai Kc dinaikkan, respon system menunjukkan semakin
cepat mencapai keadaan mantap
Namun jika Kc diperbesar sehingga mencapai hargayang
berlebihan, akan mengakibatkan system bekerja tidak stabil,
atau respon system akan berosilasi [Pakpahan, 1988, 193]
b) Pengendali Proporsional Integral (PI)
Berkaitan dengan penyimpangan kendali, perilakunya sama
dengan pengendali proporsional umpan balik. Tetapi jika ada
penyimpangan kendali yang tetap bertahan, besaran setel
(controller output) akan terus berubah samp[ai penyimpangan
kendali hilang. Perubahan besaran setel dapat diatur melalui waktu
integral.
Sifat- sifat pengendali proporsional integral
Fase sinyal kendali
Tidak terjadi offset (offset sangat kecil)
Tanggapan system lebih lambat dan cenderung kurang stabil
c) Pengendali Proporsional Integral Derifative (PID)
Pada penyimpangan kendali yang kecil, langsung timbul
perubahan besaran setel yang tidak proporsional, setelah waktu
tertentu (waktu differensial) yang dapat dipilih, pengendali
Politeknik Negeri Samarinda 18

Laporan Akhir Instrumentasi dan KontrolUnit Kontrol Flow
kembali ke prilaku PI. Meskipun ada efek differensiasi pada akhir
penyetelan tidak terdapat penyimpangan.
Sifat- sifat pengendali proporsional integral derifativ
Tidak terjadi offset.
Tanggapan cepat dan amplitudo osilasi kecil (lebih stabil).
Peka terhadap noise.
Politeknik Negeri Samarinda 19

Laporan Akhir Instrumentasi dan KontrolUnit Kontrol Flow
BAB III
METODOLOGI
2.1 Alat dan Bahan
2.1.1 Alat :
Unit kontrol flow merek HAMDEN
Hidrolik Bench
Compressor
2.1.2 Bahan :
Air
2.2 Prosedur Kerja
Mengisi air pada hidrolik Bench dan menyambungkan dengan unit
kontrol flow.
Memasukkan aliran listrik ke unit kontrol.
Menyalakan instrumen (DC Power Supply, Instrumen, Air
Compressor).
Menekan tombol Home → Loops → Flow.
Mengubah RSP menjadi LSP dengan cara pada main menu
memilih Switch SP → LSP. Menekan Esc.
Memolih Control Setup → Local Set Point dan memasukkan nilai
setpoint seebsar 3,7 lpm.
Menekan Esc. Memilih Tune Constant.
Memilih Gain #1 untuk nilai proportional.
Memilih Reset untuk nilai integral (time integral).
Memilih rate untuk derivative ( waktu derivative).
Menekan tombol Esc. Memilih Limit pada main menu dan
memasukkan nilai ketinggian maksimum PV pada PV High Lim,
yaitu sebesar 7,5.
Politeknik Negeri Samarinda 20

Laporan Akhir Instrumentasi dan KontrolUnit Kontrol Flow
Menekan Esc kemudian memilih Loop Trend. Untuk mengamati
grafik osilasi pada sistem setelah menyalakan pompa pada hidrolik
Bench.
Menentukan Overshoot, offset, dan settling time serta jenis osilasi
dari data-data P, I , dan D yang telah diberikan.
2.3 Diagram Alir Proses
Politeknik Negeri Samarinda 21
Mengisi air pada hidrolik bench dan menyambungkan dengan unit kontrol flow .
Memasukkan aliran listrik ke unit kontrol
Memilih control setup , kemudian local set point dan memasukkan nilai set point = 3,7 lpm
Menekan tombol main menu , kemudian flow , kemudian loops , kemudian tune constant
Memilih Gain # , untuk nilai proportional
Memilih rate , untuk nilai derivatif
Mengisi air pada hidrolik bench dan menyambungkan dengan unit kontrol flow .
Memasukkan aliran listrik ke unit kontrol
Menyalakan instrument, (DC power suplay , instrument , air compressor).
Menekan tombol main menu , kemudian flow , kemudian loops

Laporan Akhir Instrumentasi dan KontrolUnit Kontrol Flow
Politeknik Negeri Samarinda 22
Memilih reset , untuk nilai integral
Memilih rate , untuk nilai derivatif

Laporan Akhir Instrumentasi dan KontrolUnit Kontrol Flow
BAB IV
DATA PENGAMATAN
No. P I D OvershootSettling
TimeOffset
Gambar OsilasiKet
1 0.2 - - 4.15 0:16 2.33Osilasi Kontinu
2 2 - - 5.5 0:20 0.32Osilasi
Teredam
3 20 - - 6.09 0:16 0.2Osilasi Kontinu
4 2 0.2 - 5.55 0:53 -Osilasi
Teredam
5 2 2 - 5.61 0:39 1.32Osilasi Kontinu
Politeknik Negeri Samarinda 23
Sp
PV
T
Sp
PV
T
Sp
PV
T
Sp
PV
T
Sp
PV
T

Laporan Akhir Instrumentasi dan KontrolUnit Kontrol Flow
6 2 9 - 6.64 0:18 0.39Osilasi Kontinu
7 20 0.2 - .6.57 0:20 0.41 Tidak stabil
8 20 2 - 6.52 0:25 1.64Osilasi Kontinu
9 20 9 - 6.34 0:15 1.34Osilasi Kontinu
10 20 2 0.2 5.03 0:34 1.64 Tidak Stabil
11 20 2 2 6.5 0:20 1.59Osilasi Kontinu
Politeknik Negeri Samarinda 24
Sp
PV
T
Sp
PV
T
Sp
PV
T
Sp
PV
T
Sp
PV
T
Sp
PV
T

Laporan Akhir Instrumentasi dan KontrolUnit Kontrol Flow
12 20 2 10 6.48 0:29 1.59Osilasi Kontinu
Politeknik Negeri Samarinda 25
Sp
PV
T

Laporan Akhir Instrumentasi dan KontrolUnit Kontrol Flow
r = Nilai acuan
y = Sinyal pengukuran
m = Variabel termanipulasi Flow dari control valve
w = Variabel gangguan Flow dari pompa dan pipa
c = Variabel proses Flow yang mengalir pada pipa
u = Sinyal kendali
Politeknik Negeri Samarinda 26
Komputer
TransmitterFlow
Pipa (laju alir)
Control level
r +
-
e Um+
+ c
y
DIAGRAM BLOK

Laporan Akhir Instrumentasi dan KontrolUnit Kontrol Flow
Politeknik Negeri Samarinda 27

Laporan Akhir Instrumentasi dan KontrolUnit Kontrol Flow
BAB V
PEMBAHASAN
Praktikum kali ini adalah control flow merek HAMDEN. Adapun tujuan dari
praktikum kali ini adalah mengenal peralatan yang digunakan dalam control flow;
mengetahui prinsip kerja dari sensor; mengamati prinsip kerja system control flow;
mengamati respon dari mode pengendalian P, PI, dan PID.
Pada unitini terdapat berbagai instrument yang digunakan untuk mengendalikan
laju alir (flow), yaitu hidrolik bench, pump, valve, I/P converter, flow transmitter, flow
sensor, pressure sensor, pressure transmitter, compressor, control valve, fisher control.
Hidrolik bench merupakan bak penampungan air yang dilengkapi dengan pompa yang
berfungsi untuk mengalirkan air ke unit control flow. Besarnya laju alirran tersebut akan
dibaca oleh sensor flow yang selanjutnya akan diterjemahkan oleh flow transmitter dari
sinyal besaran fisik menjadi sinyal standar. Penerjemahan ini dimaksudkan agar dapat
dibaca oleh perangkat computer. Hasil sinyal yang sudah diterjemahkan ini disebut sinyal
pengukuran. Computer sebagai unit pengendali akan membandingkan besarnya sinyal
pengukuran dengan nilai acuan. Kemudian menentukan besarnya sinyal kendali. Sinyal
listrik ini diubah menhadi sinyal tekanan oleh I/P converter. Besarnya sinyal kendali ini
dibaca oleh sensor tekanan. Fisher control (pressure regularot) akan mengatur besarnya
tekanan udara yang dibutuhkan. Besarnya tekanan udara ini ekuivalen dengan sinyal
kendali. Tekanan udara tersebut akan masuk mengisi ruang diafragma control valve.
Perubahan besarnya difragma akan mempengaruhi naik dan turunnya stem, yaitu tuas
pembuka pada control valve, sehingga akan terbentuk bukaan yang dapat menghasilkan
laju alir sesuai dengan setpoint. Akan tetapi, terdapat variable gangguan yang
menyebabkan variable proses yang tidak sesuai dengan setpoint.
Pada unit ini yang merupakan variable proses adalah laju alir pada sistem proses
yaitu pipa. Variable termanipulasi pada proses ini adalah laju alir dari control valve.
Dalam pengendalian ini terdapat variable gangguan sehingga variable proses tidak sesuai
atau bahkan jauh dari setpoint, yaitu laju alir dari pompa
Politeknik Negeri Samarinda 28

Laporan Akhir Instrumentasi dan KontrolUnit Kontrol Flow
Sensor laju alir terpasang pada pipa aliran. Sensor ini adalah orifice. Prinsip
kerjanya berdasarkan perbedaan tekanan antara sisi 1 dengan sisi yang lainnya. Setelah
diakumulasi akan terukur besarnya aliran. Transmitter pada sensor laju alir akan
mengubah besaran tersebut menjadi sinyal pengukuran. Sensor ini dihubungkan dengan
U tube manometer.
Pengendalian dengan mode P (Proportional) settling timenya cepat. Pada PB = 2,
tanggapannya merupakan osilasi teredam tetapi tidak pas dengan setpoint. Pada mode
pengendalian PI (Proportional Integral), settling timenya menjadi lebih lambat dari mode
pengendalian Proportional. Pada PB = 2 dan TR = 0,2 terjadi tanggapan osilasi teredam
dengan offset sama dengan 0. Pada masukan nilai lain offset-nya kecil akan tetapi
tanggapannya tidak stabil dan cendurang osilasi continue. Pada mode pengendalian PID
(Proportional Integral Derivatif), respon settling time sangat lambat dibandingkan dengan
mode sebelumnya. Selain itu, offset semakin membesar dibanding mode sebelumnya.
Tanggapannya tidak stabil dan osilasi continue. Sehingga, dapat disimpulkan bahwa
mode pengendali yang paling baik untuk digunakan adalah mode PI (proportional
integral) dengan PB =2 dan TR = 0,2 dimana offset = 0 dan tanggapannya adalah osilasi
teredam tetapi settling time-nya agak lama.
Pada pengendalian proportional, semakin tinggi nilai PB maka semakin tinggi
overshoot dan offset semakin kecil. Pada mode proportional integral, semakin tinggi nilai
PB maka overshoot semakin tinggi dan semakin tinggi TR maka semakin tinggi offset
tetapi settling time makin lama. Pada mode proportional integral derivatife, semakin
tinggi nilai TD maka overshoot semakin besar dan offset akan mengecil.
Politeknik Negeri Samarinda 29

Laporan Akhir Instrumentasi dan KontrolUnit Kontrol Flow
BAB V
PENUTUP
5.1 Kesimpulan
1. Peralatan yang digunakan adalah sensor, transmitter hidrolikbench, kompresor,
control valve, I/P conventer, fisher controler (pressure regulator).
2. Sensor aliran pada unit ini bekerja berdasarkan beda tekanan.
3. Mode PI dengan nilai P=2 dan I=0.2 dapat mencapai setpoin dengan pas
walaupun responnya paling lambat. Akan tetapi merupakan satu-satunya
tanggapan osilasi terendam
4. Besarnya overshoot tiap mode baik P, PI, dan PID hampir-hampir sama.
Politeknik Negeri Samarinda 30

Laporan Akhir Instrumentasi dan KontrolUnit Kontrol Flow
DAFTAR PUSTAKA
Team Dosen,2009,”Penuntun Praktikum Kimia Fisika”POLNES.
Politeknik Negeri Samarinda 31