I-Guideee.bradley.edu/projects/proj2009/iguide/deliverables/documents/I... · DC-DC Converter Recom...
32
Transcript of I-Guideee.bradley.edu/projects/proj2009/iguide/deliverables/documents/I... · DC-DC Converter Recom...


I-Guide
Intelligent Guide Robot
Joe Buckner & Nir Chezrony
Advisors:
Dr. Joel Schipper & Dr. James Irwin
Sponsored By:
Northrop Grumman

Presentation Overview
Previous Project Research
Project Summary
Project Goals and Functional Requirements
System Block Diagram
Software Flowchart
Subsumption vs Blackboard Architecture
Accomplishments
Remaining Work
GANTT Chart3

Previous Project Research
Previous Platforms
Magellan Robot
GuideBot (Using Pioneer 2)
Localization Methods and Sensors
Mapping
Feature Recognition
RFID
4
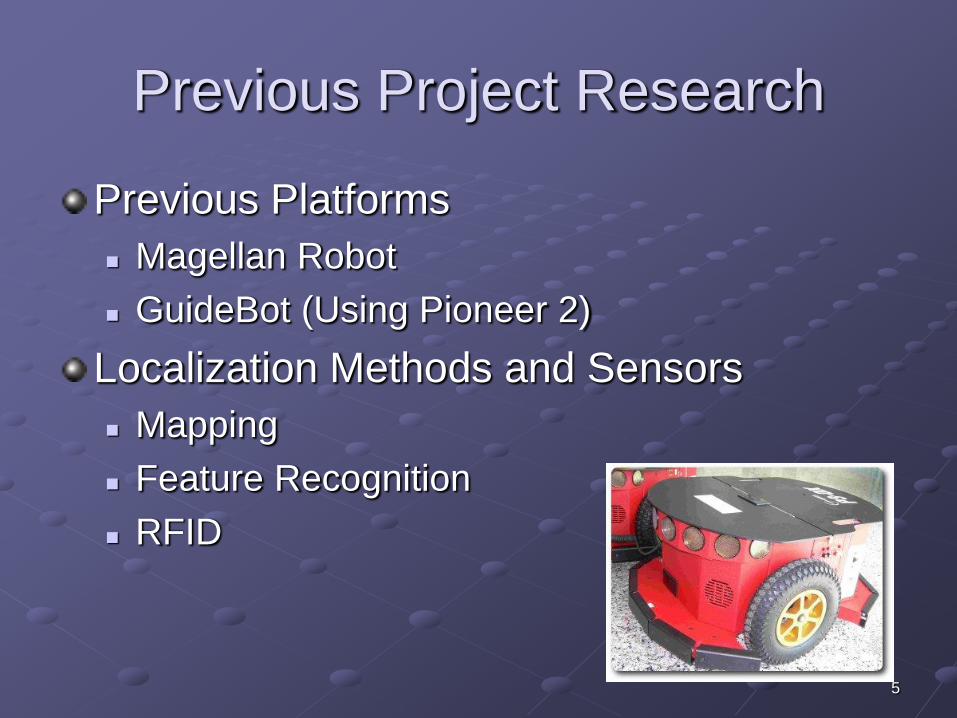
Previous Project Research
Previous Platforms
Magellan Robot
GuideBot (Using Pioneer 2)
Localization Methods and Sensors
Mapping
Feature Recognition
RFID
5

Project Summary
Autonomous Tour Robot – Pioneer 3
2nd and 3rd floor of ECE Department
Utilize Elevator
Localization - Barcodes
Navigation – Topological Decomposition
6

Nodal Navigation
7

Project Goals Drive
Functional Requirements
Successfully Navigate ECE Department
3 floor tour options or 28 locations
Locate waypoints within a 4’ radius
React in a ‘Human-like’ Manner
Avoid all obstacles humans avoid obstacles
Software loop time human reaction time
Transit speed human walking speed
8

System Block Diagram
9
Pioneer
Robot
Battery
TouchscreenSpeakers Laptop
Barcode Reader
Barcode Real World
Sonar Sensors
Bump Sensors
IR Sensors
DC-DC Converter Voltage Regulator
Compass
Wireless
Wired

System Block Diagram
10
Pioneer
Robot
Battery
TouchscreenSpeakers Laptop
Barcode Reader
Barcode Real World
Sonar Sensors
Bump Sensors
IR Sensors
DC-DC Converter Voltage Regulator
Compass
Wireless
Wired

System Block Diagram
11
Pioneer
Robot
Battery
TouchscreenSpeakers Laptop
Barcode Reader
Barcode Real World
Sonar Sensors
Bump Sensors
IR Sensors
DC-DC Converter Voltage Regulator
Compass
Wireless
Wired

System Block Diagram
12
Pioneer
Robot
Battery
TouchscreenSpeakers Laptop
Barcode Reader
Barcode Real World
Sonar Sensors
Bump Sensors
IR Sensors
DC-DC Converter Voltage Regulator
Compass
Wireless
Wired

System Block Diagram
13
Pioneer
Robot
Battery
TouchscreenSpeakers Laptop
Barcode Reader
Barcode Real World
Sonar Sensors
Bump Sensors
IR Sensors
DC-DC Converter Voltage Regulator
Compass
Wireless
Wired

Software Flowchart
14
Path Planning / Localization NavigationObstacle Detection & Avoidance
Barcode Found
Barcode Found
Current Bearing
Obstacle Detected
No ObstacleDistance to Next Barcode

Software Flowchart
15
Path Planning / Localization
Touchscreen
Input
Digital
Compass
Barcode
Reader
NavigationObstacle Detection & Avoidance
Barcode Found
Barcode Found
Current Bearing
Obstacle Detected
No ObstacleDistance to Next Barcode
Audio and
Video
Feedback

Software Flowchart
16
Path Planning / Localization NavigationObstacle Detection &
Avoidance
Sonar
Sensors
IR
Sensors
Barcode Found
Barcode Found
Current Bearing
Obstacle Detected
No ObstacleDistance to Next Barcode
Bump
Sensors

Software Flowchart
17
Path Planning / Localization
Navigation
Sonar
Sensor
IR
Sensors
Digital
Compass
Obstacle Detection & Avoidance
Barcode Found
Barcode Found
Current Bearing
Obstacle Detected
No ObstacleDistance to Next Barcode

Subsumption vs. Blackboard
ArchitectureSubsumption Blackboard
18
High Level
Process
Mid Level
Process
Low Level
Process
X
X
Higher Function Done
Higher Function Done
Higher Function Needed
Higher Function Needed
Decision
Maker
Sensor
Sensor
Sensor
Sensor

Accomplishments
Selected Robot Platform
Built ModelSim Environments
Developed Flowcharts
Path Planning Algorithm
Navigation Algorithm
Interfaced Development HID - Joystick
19

Accomplishments
Selected Localization & Navigation Sensors
Native Sonar Sensors
Barcode Reader
Digital Compass
IR Sensors
20

Incomplete Work
Obstacle Detection/Avoidance Algorithm
Sonar Sensor Filtering Research
Adjusting Gain
Adjusting Firing Order
Erratic Value Check
Rolling Average
Kalman Filter
21

Parts List
22
Component Vendor Part Number Quantity Ordering Cost
Touchscreen 3M 11-81375-225 1
Speakers Cyber Acoustics CA-2908 1 40.00$
IR Sensors Sharp GP2Y0A700K 8 100.00$
Barcode Reader Wasp WLS8400ER 1 600.00$
Rear Sonar Sensors ActivMedia ACAX032 1 470.00$
Compass ActivMedia ACT012 1 1,395.00$
DC-DC Converter Recom RP30-1212SF 1 110.00$
Bumper ActivMedia ACAX013 1 945.00$
ADC to USB with
Terminal Board Pico Technology PP241 1 189.00$
Voltage Regulator National Semiconductor LM317T 1 1.86$
Pioneer ActivMedia P3X0001 1
Grand Total 3,850.86$

Parts List
23
Component Vendor Part Number Quantity Ordering Cost
Touchscreen 3M 11-81375-225 1
Speakers Cyber Acoustics CA-2908 1 40.00$
IR Sensors Sharp GP2Y0A700K 8 100.00$
Barcode Reader Wasp WLS8400ER 1 600.00$
Rear Sonar Sensors ActivMedia ACAX032 1 470.00$
Compass ActivMedia ACT012 1 1,395.00$
DC-DC Converter Recom RP30-1212SF 1 110.00$
Bumper ActivMedia ACAX013 1 945.00$
ADC to USB with
Terminal Board Pico Technology PP241 1 189.00$
Voltage Regulator National Semiconductor LM317T 1 1.86$
Pioneer ActivMedia P3X0001 1
Grand Total 3,850.86$

Sonar Sensor
Software Fix
(Joe)
Wall Follow
Algorithm Test -
Simulation
(Joe)
Wall Follow
Algorithm Test -
Experimental
(Joe)
Obstacle
Detection /
Avoidance
Algorithm Test -
Simulation (Joe)
Obstacle
Detection /
Avoidance
Algorithm Test –
Experimental
(Joe)
Final Run
(Joe & Nir)
Bump Sensor
Software
Interface (Joe)
Barcode
Software
Interface (Nir)
ADC-USB
Software
Interface
(Nir)
Voltage
Regulator
Hardware
Interface (Joe)
Barcode Read
Test
(Joe)
Compass
Software
Interface
(Nir)
Touchscreen
Software
Interface (Nir)
Touchscreen GUI
Software
Interface (Nir)
Navigation /
Localization
Algorithm Test -
Experimental
(Nir)
DC-DC Converter
Hardware
Interface (Joe)
Filming / Audio
Prep
(Joe & Nir)
24

Next Year’s Gantt Chart
25
ID Task NameApr 2009
3/1
1 ADC-USB Software Interface (Nir)
2 Touchscreen Software Interface (Nir)
3 Barcode Software Interface (Nir)
4Touchscreen GUI Software Interface
(Nir)
5 Compass Software Interface (Nir)
6Navigation / Localization Algorithm
Test - Experimental (Nir)
7 Filming / Audio Prep (Joe & Nir)
8Voltage Regulator Hardware Interface
(Joe)
9DC-DC Converter Hardware Interface
(Joe)
10Bump Sensor Software Interface
(Joe)
11 Sonar Sensor Software Fix (Joe)
12 Barcode Read Test (Joe)
13Wall Follow Algorithm Test –
Simulation (Joe)
14Wall Follow Algorithm Test –
Experimental (Joe)
15Obstacle Detection / Avoidance
Algorithm Test - Simulation (Joe)
16Obstacle Detection / Avoidance
Algorithm Test – Experimental (Joe)
17 Final Run (Joe & Nir)
2/1 3/8
Mar 2009
4/53/222/8 2/222/15 4/123/15 3/29
Feb 2009 May 2009
4/19 4/26 5/3

Acknowledgments and
QuestionsDr. Joel Schipper
Dr. James Irwin
Dr. Aleksander Malinowski
Dr. Gary Dempsey
Mr. Nick Schmidt
Mr. Chris Mattus
Phillip Faber
26

High Level Goals
Successfully navigate the ECE
Department
Identify key points throughout a tour
Provide accurate information to the user
Provide a means for user input
27

Full Requirements (1)
Must reach intended goal within a 4’ radius
Avoid all obstacles, moving or stationary
Must detect when battery is at 10% of max
charge
Additional range sensors added to the
Pioneer 3 must have a minimum range
from 6” to 10’
28

Full Requirements (2)
Additional range sensors added to the
Pioneer 3 must have a measurement
accuracy of 5”
Must allow user to select one of 28
locations or one of 3 complete floor tours
Additional compass sensor added to the
Pioneer 3 must provide an accurate
magnetic bearing within 10°
Must have a complete software loop faster
than 180 ms
Must maintain an average speed of 31.5
29
Full Requirements (3)
Must have a complete software loop faster
than 180 ms
Must maintain an average speed of 31.5
in/sec during transit
30

Behavior Based Navigation
31

Model Based Navigation
32