Gerak dalam kerangka noninersial file•Gerak benda dalam kerangka noninersial, yaitu gerak suatu...
74
Gerak dalam kerangka noninersial Dr. Agus Suroso FI2104 Mekanika B
Transcript of Gerak dalam kerangka noninersial file•Gerak benda dalam kerangka noninersial, yaitu gerak suatu...
Gerak dalam kerangkanoninersial
Dr. Agus Suroso
FI2104 Mekanika B
Kerangka noninersial
• Kerangka noninersial adalah kerangka yang dipercepat.
• Gerak benda dalam kerangka noninersial, yaitu gerak suatu bendayang ditinjau oleh kerangka yang dipercepat.
• Contoh:
1. Seseorang berjalan di dalam bus yang dipercepat ke depan.
2. Seseorang berjalan di dalam bus yang bergerak melingkar.
3. Seseorang berjalan di tepi jalan, diamati oleh orang di dalam bus yang dipercepat (baik lurus maupun melingkar).
agussuroso[fi]itb.ac.id FI2104 Mekanika B: Gerak pada kerangka noninersial 2
Kerangka bertranslasi dipercepat
agussuroso[fi]itb.ac.id FI2104 Mekanika B: Gerak pada kerangka noninersial 3

Kerangka bergerak lurus dipercepat
Seseorang berjalan di dalam bus yang bergerakdipercepat, diamati oleh pengamat di rumah dan di dalam bus.
Bus dipercepat.
agussuroso[fi]itb.ac.id FI2104 Mekanika B: Gerak pada kerangka noninersial 4
Kerangka bergerak lurus dipercepat
Seseorang berjalan di dalam bus yang bergerakdipercepat, diamati oleh pengamat di rumah dan di dalam bus.
Bus dipercepat.
Rumah: kerangkainersial.
agussuroso[fi]itb.ac.id FI2104 Mekanika B: Gerak pada kerangka noninersial 5
Kerangka bergerak lurus dipercepat
Seseorang berjalan di dalam bus yang bergerakdipercepat, diamati oleh pengamat di rumah dan di dalam bus.
Bus: kerangkanoninersial.
Rumah: kerangkainersial.
agussuroso[fi]itb.ac.id FI2104 Mekanika B: Gerak pada kerangka noninersial 6

Kerangka bergerak lurus dipercepat
Posisi orang:𝑥 = 𝑋 + 𝑥′
𝑋
𝑥
𝑥′agussuroso[fi]itb.ac.id FI2104 Mekanika B: Gerak pada kerangka noninersial 7
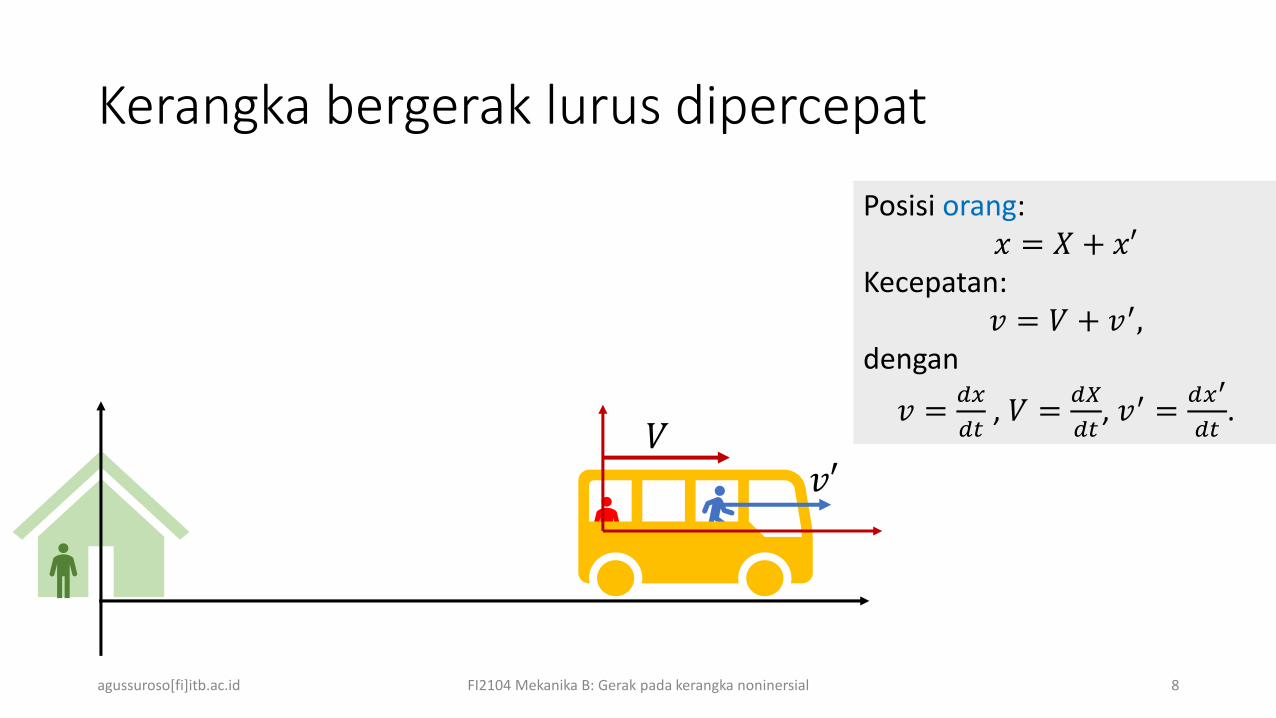
Kerangka bergerak lurus dipercepat
Posisi orang:𝑥 = 𝑋 + 𝑥′
Kecepatan:𝑣 = 𝑉 + 𝑣′,
dengan
𝑣 =𝑑𝑥
𝑑𝑡, 𝑉 =
𝑑𝑋
𝑑𝑡, 𝑣′ =
𝑑𝑥′
𝑑𝑡.
𝑉𝑣′
agussuroso[fi]itb.ac.id FI2104 Mekanika B: Gerak pada kerangka noninersial 8

Kerangka bergerak lurus dipercepat
Posisi orang:𝑥 = 𝑋 + 𝑥′
Kecepatan:𝑣 = 𝑉 + 𝑣′,
dengan
𝑣 =𝑑𝑥
𝑑𝑡, 𝑉 =
𝑑𝑋
𝑑𝑡, 𝑣′ =
𝑑𝑥′
𝑑𝑡.
Percepatan:𝑎 = 𝐴 + 𝑎′,
dengan
𝑎 =𝑑𝑣
𝑑𝑡, 𝐴 =
𝑑𝑉
𝑑𝑡, 𝑎′ =
𝑑𝑣′
𝑑𝑡.
𝐴𝑎′
agussuroso[fi]itb.ac.id FI2104 Mekanika B: Gerak pada kerangka noninersial 9
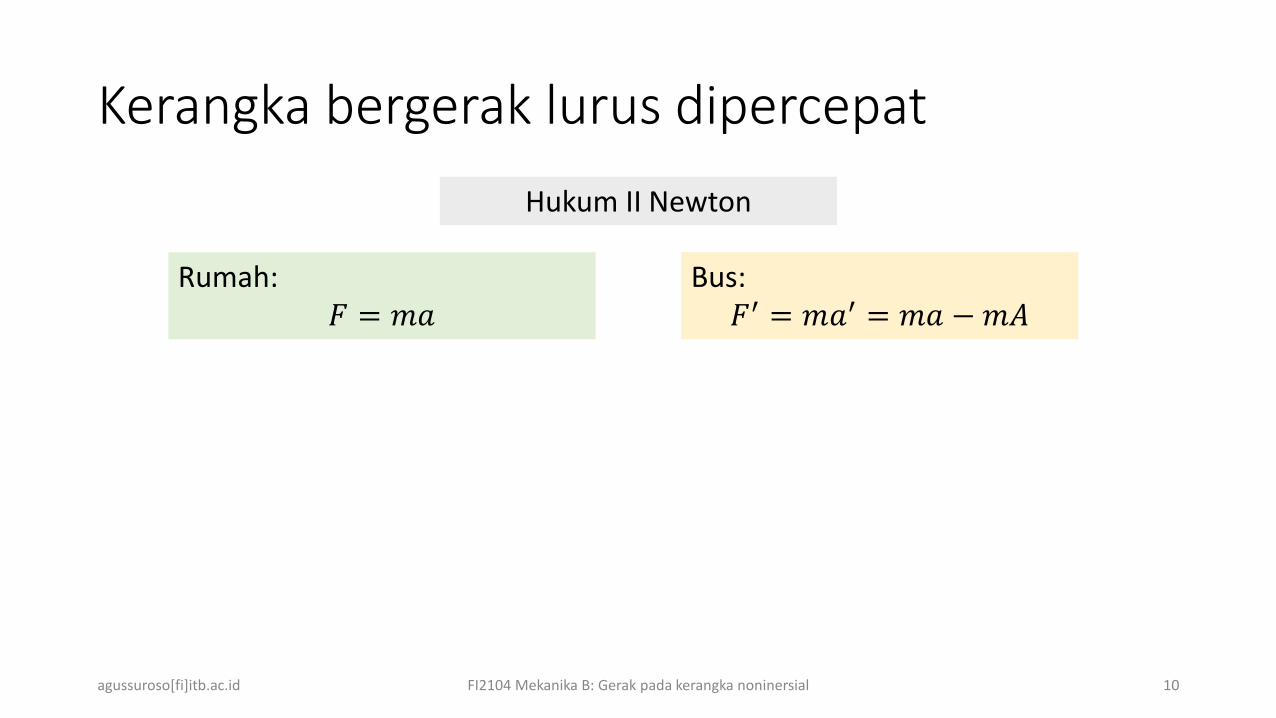
Kerangka bergerak lurus dipercepat
Rumah:𝐹 = 𝑚𝑎
Bus:𝐹′ = 𝑚𝑎′ = 𝑚𝑎 −𝑚𝐴
Hukum II Newton
agussuroso[fi]itb.ac.id FI2104 Mekanika B: Gerak pada kerangka noninersial 10

Kerangka bergerak lurus dipercepat
Rumah:𝐹 = 𝑚𝑎
Bus:𝐹′ = 𝑚𝑎′ = 𝑚𝑎 −𝑚𝐴
Hukum II Newton
Gaya fiktif:• Besarnya 𝑚𝐴• Arahnya berlawanan
dengan percepatankerangka.
agussuroso[fi]itb.ac.id FI2104 Mekanika B: Gerak pada kerangka noninersial 11

Kerangka bergerak lurus dipercepat
Rumah:𝐹 = 𝑚𝑎
Bus:𝐹′ = 𝑚𝑎′ = 𝑚𝑎 −𝑚𝐴
Hukum II Newton
Gaya fiktif:• Besarnya 𝑚𝐴• Arahnya berlawanan
dengan percepatankerangka.
Gaya fiktif akibat kerangkabertranslasi dipercepat:
Ԧ𝐹𝑡𝑟𝑎𝑛𝑠𝑙𝑎𝑠𝑖 = −𝑚 Ԧ𝐴
agussuroso[fi]itb.ac.id FI2104 Mekanika B: Gerak pada kerangka noninersial 12

Kerangka berotasi
agussuroso[fi]itb.ac.id FI2104 Mekanika B: Gerak pada kerangka noninersial 13

Kerangka berotasiSeekor kura-kura berjalan di atas sebuah cakram.
𝑥
𝑦
𝑧
𝑦′
𝑥′
𝑧′Kerangkaruangan.
Kerangkacakram.
𝑂′
𝑂
agussuroso[fi]itb.ac.id FI2104 Mekanika B: Gerak pada kerangka noninersial 14

Kerangka berotasiJika cakram berputar terhadap sumbu-z.
𝑥
𝑦
𝑧
𝜔𝑧
𝑦′
𝑥′
𝑧′
𝑂′
𝑂
agussuroso[fi]itb.ac.id FI2104 Mekanika B: Gerak pada kerangka noninersial 15

Kerangka berotasiJika cakram berputar terhadap sumbu-z.
𝑥
𝑦
𝜔𝑧
𝑥′
𝑦′
𝑂
𝑂′
agussuroso[fi]itb.ac.id FI2104 Mekanika B: Gerak pada kerangka noninersial 16
Tampak atas

Kerangka berotasi
𝜔𝑧
𝑥′
𝑦′
𝑥
𝑦𝑂
𝑂′
Perhatikan bahwa basis koordinat 𝑂dan 𝑂’ berbeda.
agussuroso[fi]itb.ac.id FI2104 Mekanika B: Gerak pada kerangka noninersial 17

Kerangka berotasi
𝜔𝑧
ො𝑥′
ො𝑦′
ො𝑥
ො𝑦𝑂𝑂′
𝑑𝜙
𝑑𝑡= 𝜔𝑧
𝜙
𝜙
Perhatikan bahwa basis koordinat 𝑂dan 𝑂’ berbeda.
Hubungannya,
ො𝑥′ො𝑦′
Ƹ𝑧′
=cos 𝜙 sin𝜙 0−sin𝜙 cos 𝜙 0
0 0 1
ො𝑥ො𝑦Ƹ𝑧
agussuroso[fi]itb.ac.id FI2104 Mekanika B: Gerak pada kerangka noninersial 18
Kerangka berotasiPosisi, kecepatan
agussuroso[fi]itb.ac.id FI2104 Mekanika B: Gerak pada kerangka noninersial 19

Kerangka berotasi
𝑥
𝑦
𝜔𝑧
𝑥′
𝑦′
𝑂
𝑂′
𝑅
Ԧ𝑟′Ԧ𝑟
Posisi kura-kura:
Ԧ𝑟 = 𝑅 + Ԧ𝑟′.
agussuroso[fi]itb.ac.id FI2104 Mekanika B: Gerak pada kerangka noninersial 20

Kerangka berotasiPosisi kura-kura:
Ԧ𝑟 = 𝑅 + Ԧ𝑟′.Kecepatan:
Ԧ𝑣 = 𝑉 +𝑑Ԧ𝑟′
𝑑𝑡,
dengan
Ԧ𝑣 =𝑑 Ԧ𝑟
𝑑𝑡, 𝑉 =
𝑑𝑅
𝑑𝑡.
𝑥
𝑦
𝜔𝑧
𝑥′
𝑦′
𝑂
𝑂′
𝑅
Ԧ𝑟′Ԧ𝑟
agussuroso[fi]itb.ac.id FI2104 Mekanika B: Gerak pada kerangka noninersial 21

Kerangka berotasiPosisi kura-kura:
Ԧ𝑟 = 𝑅 + Ԧ𝑟′.Kecepatan:
Ԧ𝑣 = 𝑉 +𝑑Ԧ𝑟′
𝑑𝑡,
dengan
Ԧ𝑣 =𝑑 Ԧ𝑟
𝑑𝑡, 𝑉 =
𝑑𝑅
𝑑𝑡.
𝑥
𝑦
𝜔𝑧
𝑥′
𝑦′
𝑂
𝑂′
𝑅
Ԧ𝑟′Ԧ𝑟
Perhatikan suku ini.
agussuroso[fi]itb.ac.id FI2104 Mekanika B: Gerak pada kerangka noninersial 22

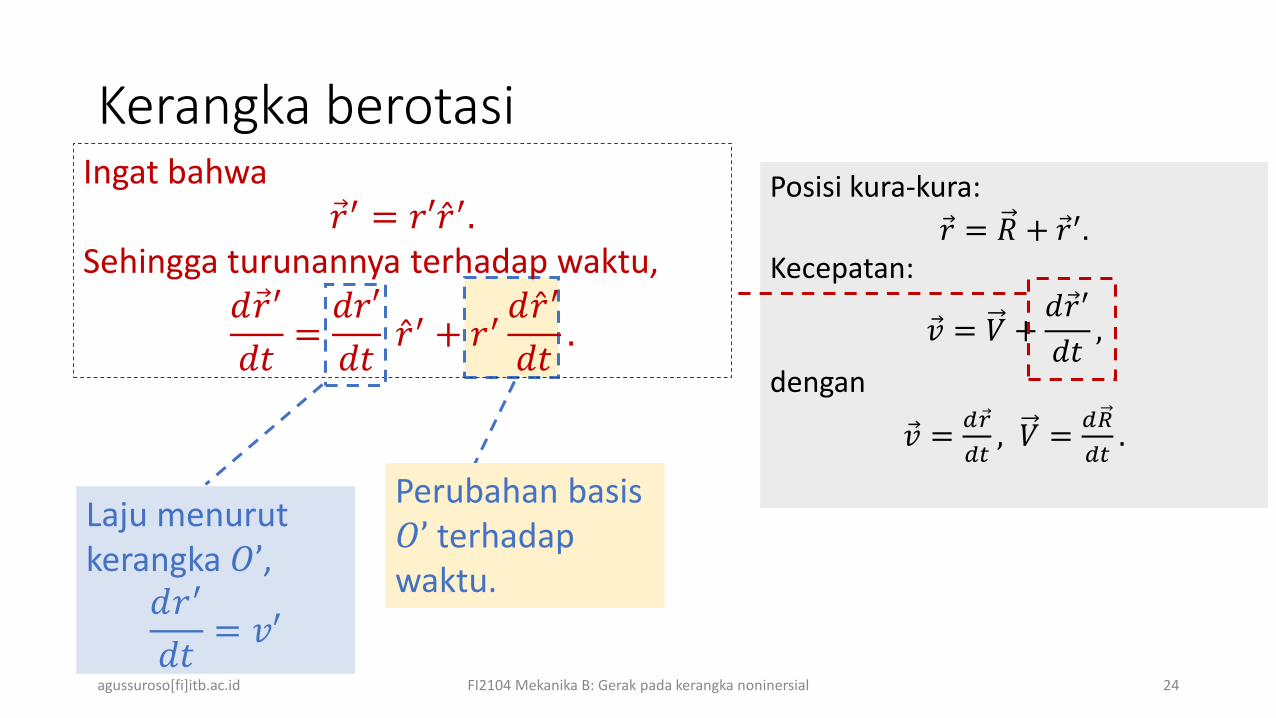
Kerangka berotasiPosisi kura-kura:
Ԧ𝑟 = 𝑅 + Ԧ𝑟′.Kecepatan:
Ԧ𝑣 = 𝑉 +𝑑Ԧ𝑟′
𝑑𝑡,
dengan
Ԧ𝑣 =𝑑 Ԧ𝑟
𝑑𝑡, 𝑉 =
𝑑𝑅
𝑑𝑡.
Ingat bahwaԦ𝑟′ = 𝑟′ Ƹ𝑟′.
Sehingga turunannya terhadap waktu,𝑑 Ԧ𝑟′
𝑑𝑡=𝑑𝑟′
𝑑𝑡Ƹ𝑟′ + 𝑟′
𝑑 Ƹ𝑟′
𝑑𝑡.
Laju menurutkerangka 𝑂’,
𝑑𝑟′
𝑑𝑡= 𝑣′
agussuroso[fi]itb.ac.id FI2104 Mekanika B: Gerak pada kerangka noninersial 23
Kerangka berotasiPosisi kura-kura:
Ԧ𝑟 = 𝑅 + Ԧ𝑟′.Kecepatan:
Ԧ𝑣 = 𝑉 +𝑑Ԧ𝑟′
𝑑𝑡,
dengan
Ԧ𝑣 =𝑑 Ԧ𝑟
𝑑𝑡, 𝑉 =
𝑑𝑅
𝑑𝑡.
Ingat bahwaԦ𝑟′ = 𝑟′ Ƹ𝑟′.
Sehingga turunannya terhadap waktu,𝑑 Ԧ𝑟′
𝑑𝑡=𝑑𝑟′
𝑑𝑡Ƹ𝑟′ + 𝑟′
𝑑 Ƹ𝑟′
𝑑𝑡.
Laju menurutkerangka 𝑂’,
𝑑𝑟′
𝑑𝑡= 𝑣′
Perubahan basis 𝑂’ terhadap waktu.
agussuroso[fi]itb.ac.id FI2104 Mekanika B: Gerak pada kerangka noninersial 24
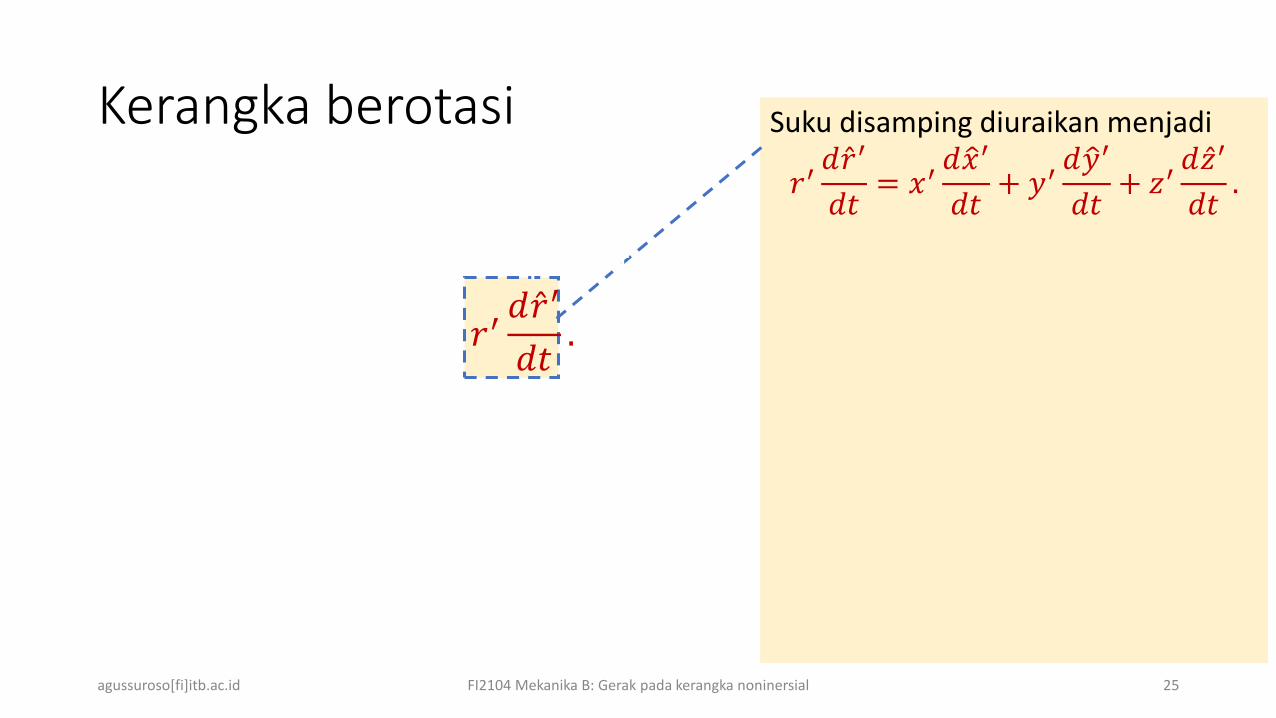
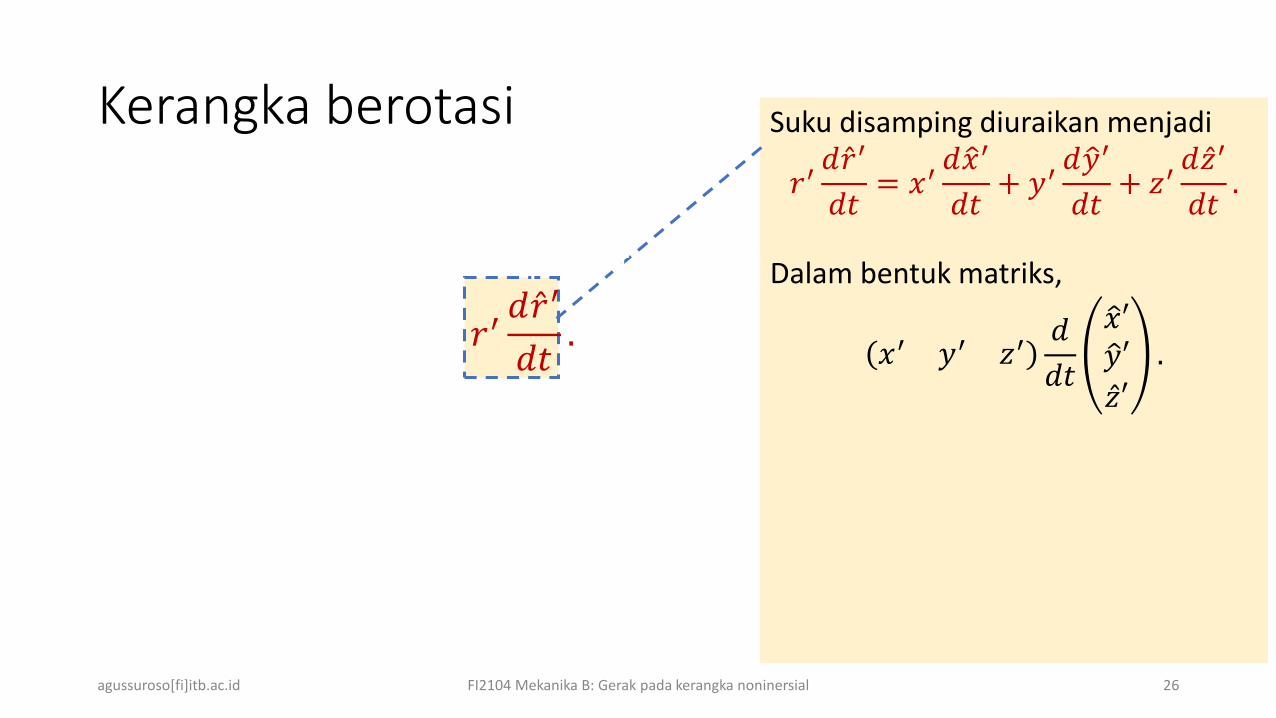
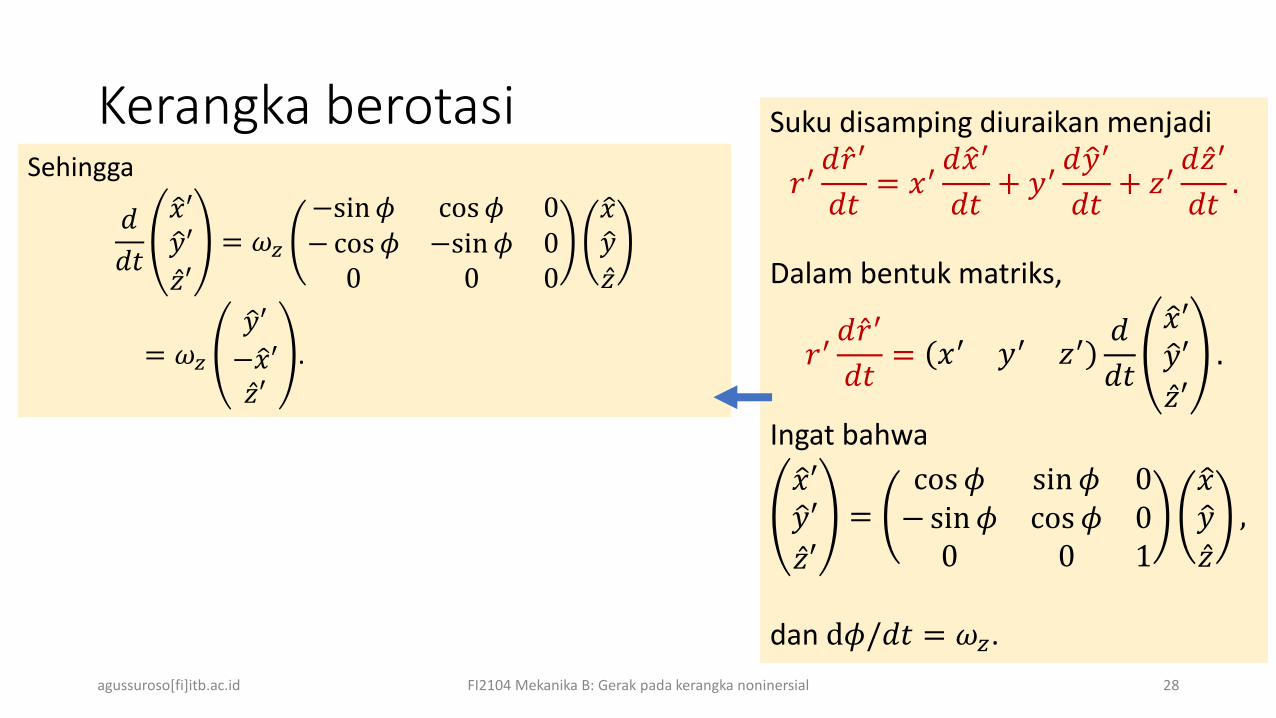
Kerangka berotasi Suku disamping diuraikan menjadi
𝑟′𝑑 Ƹ𝑟′
𝑑𝑡= 𝑥′
𝑑 ො𝑥′
𝑑𝑡+ 𝑦′
𝑑 ො𝑦′
𝑑𝑡+ 𝑧′
𝑑 Ƹ𝑧′
𝑑𝑡.
Dalam bentuk matriks,
𝑥′ 𝑦′ 𝑧′𝑑
𝑑𝑡
ො𝑥′ො𝑦′
Ƹ𝑧′
.
Ingat bahwa
ො𝑥′ො𝑦′
Ƹ𝑧′
=cos𝜙 sin𝜙 0− sin𝜙 cos 𝜙 0
0 0 1
ො𝑥ො𝑦Ƹ𝑧
,
dan d𝜙/𝑑𝑡 = 𝜔𝑧.
Ingat bahwaԦ𝑟′ = 𝑟′ Ƹ𝑟′.
Sehingga turunannya terhadap waktu,𝑑 Ԧ𝑟′
𝑑𝑡=𝑑𝑟′
𝑑𝑡Ƹ𝑟′ + 𝑟′
𝑑 Ƹ𝑟′
𝑑𝑡.
agussuroso[fi]itb.ac.id FI2104 Mekanika B: Gerak pada kerangka noninersial 25
Kerangka berotasi Suku disamping diuraikan menjadi
𝑟′𝑑 Ƹ𝑟′
𝑑𝑡= 𝑥′
𝑑 ො𝑥′
𝑑𝑡+ 𝑦′
𝑑 ො𝑦′
𝑑𝑡+ 𝑧′
𝑑 Ƹ𝑧′
𝑑𝑡.
Dalam bentuk matriks,
𝑥′ 𝑦′ 𝑧′𝑑
𝑑𝑡
ො𝑥′ො𝑦′
Ƹ𝑧′
.
Ingat bahwa
ො𝑥′ො𝑦′
Ƹ𝑧′
=cos𝜙 sin𝜙 0− sin𝜙 cos 𝜙 0
0 0 1
ො𝑥ො𝑦Ƹ𝑧
,
dan d𝜙/𝑑𝑡 = 𝜔𝑧.
Ingat bahwaԦ𝑟′ = 𝑟′ Ƹ𝑟′.
Sehingga turunannya terhadap waktu,𝑑 Ԧ𝑟′
𝑑𝑡=𝑑𝑟′
𝑑𝑡Ƹ𝑟′ + 𝑟′
𝑑 Ƹ𝑟′
𝑑𝑡.
agussuroso[fi]itb.ac.id FI2104 Mekanika B: Gerak pada kerangka noninersial 26

Kerangka berotasi Suku disamping diuraikan menjadi
𝑟′𝑑 Ƹ𝑟′
𝑑𝑡= 𝑥′
𝑑 ො𝑥′
𝑑𝑡+ 𝑦′
𝑑 ො𝑦′
𝑑𝑡+ 𝑧′
𝑑 Ƹ𝑧′
𝑑𝑡.
Dalam bentuk matriks,
𝑥′ 𝑦′ 𝑧′𝑑
𝑑𝑡
ො𝑥′ො𝑦′
Ƹ𝑧′
.
Ingat bahwa
ො𝑥′ො𝑦′
Ƹ𝑧′
=cos𝜙 sin𝜙 0− sin𝜙 cos 𝜙 0
0 0 1
ො𝑥ො𝑦Ƹ𝑧
,
dan d𝜙/𝑑𝑡 = 𝜔𝑧.
agussuroso[fi]itb.ac.id FI2104 Mekanika B: Gerak pada kerangka noninersial 27
Kerangka berotasi Suku disamping diuraikan menjadi
𝑟′𝑑 Ƹ𝑟′
𝑑𝑡= 𝑥′
𝑑 ො𝑥′
𝑑𝑡+ 𝑦′
𝑑 ො𝑦′
𝑑𝑡+ 𝑧′
𝑑 Ƹ𝑧′
𝑑𝑡.
Dalam bentuk matriks,
𝑟′𝑑 Ƹ𝑟′
𝑑𝑡= 𝑥′ 𝑦′ 𝑧′
𝑑
𝑑𝑡
ො𝑥′ො𝑦′
Ƹ𝑧′
.
Ingat bahwa
ො𝑥′ො𝑦′
Ƹ𝑧′
=cos𝜙 sin𝜙 0− sin𝜙 cos 𝜙 0
0 0 1
ො𝑥ො𝑦Ƹ𝑧
,
dan d𝜙/𝑑𝑡 = 𝜔𝑧.
Sehingga
𝑑
𝑑𝑡
ො𝑥′ො𝑦′
Ƹ𝑧′
= 𝜔𝑧
−sin𝜙 cos𝜙 0−cos𝜙 −sin𝜙 0
0 0 0
ො𝑥ො𝑦Ƹ𝑧
= 𝜔𝑧
ො𝑦′
−ො𝑥′Ƹ𝑧′
.
agussuroso[fi]itb.ac.id FI2104 Mekanika B: Gerak pada kerangka noninersial 28
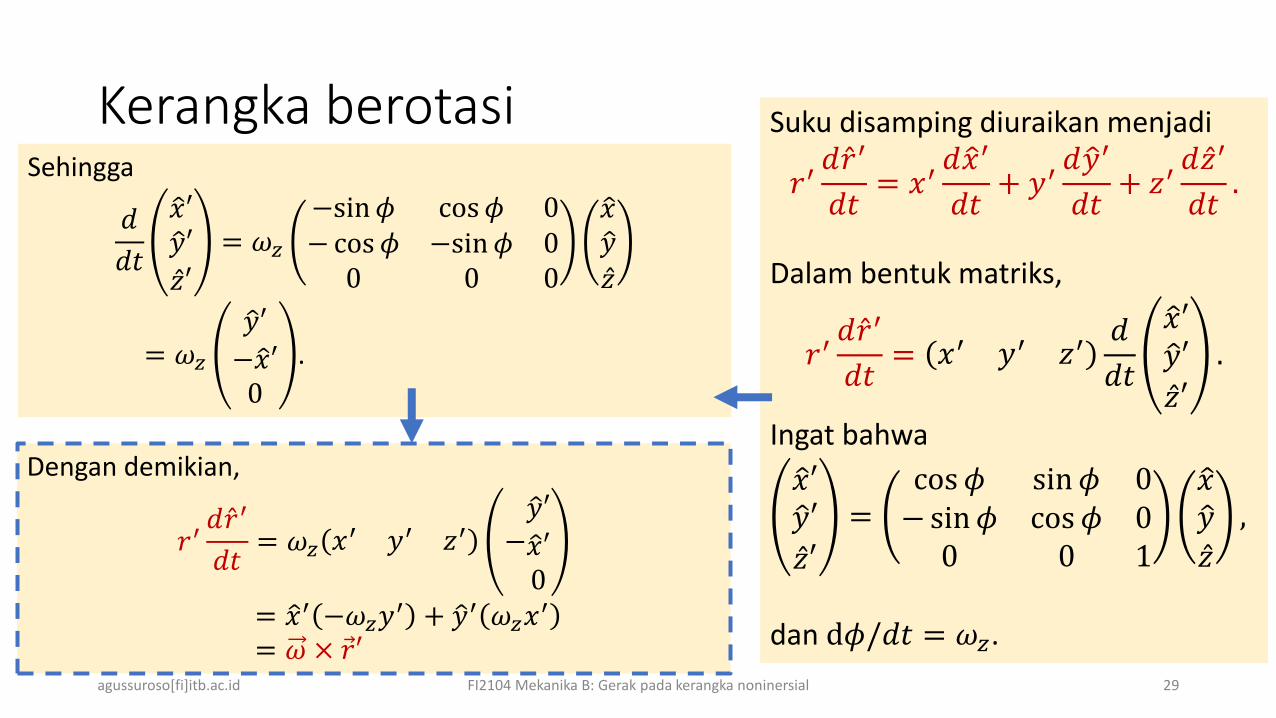
Kerangka berotasi Suku disamping diuraikan menjadi
𝑟′𝑑 Ƹ𝑟′
𝑑𝑡= 𝑥′
𝑑 ො𝑥′
𝑑𝑡+ 𝑦′
𝑑 ො𝑦′
𝑑𝑡+ 𝑧′
𝑑 Ƹ𝑧′
𝑑𝑡.
Dalam bentuk matriks,
𝑟′𝑑 Ƹ𝑟′
𝑑𝑡= 𝑥′ 𝑦′ 𝑧′
𝑑
𝑑𝑡
ො𝑥′ො𝑦′
Ƹ𝑧′
.
Ingat bahwa
ො𝑥′ො𝑦′
Ƹ𝑧′
=cos𝜙 sin𝜙 0− sin𝜙 cos 𝜙 0
0 0 1
ො𝑥ො𝑦Ƹ𝑧
,
dan d𝜙/𝑑𝑡 = 𝜔𝑧.
Sehingga
𝑑
𝑑𝑡
ො𝑥′ො𝑦′
Ƹ𝑧′
= 𝜔𝑧
−sin𝜙 cos𝜙 0−cos𝜙 −sin𝜙 0
0 0 0
ො𝑥ො𝑦Ƹ𝑧
= 𝜔𝑧
ො𝑦′
−ො𝑥′0
.
Dengan demikian,
𝑟′𝑑 Ƹ𝑟′
𝑑𝑡= 𝜔𝑧 𝑥′ 𝑦′ 𝑧′ −
ො𝑦′
ො𝑥′0
= ො𝑥′ −𝜔𝑧𝑦′ + ො𝑦′ 𝜔𝑧𝑥
′
= 𝜔 × Ԧ𝑟′agussuroso[fi]itb.ac.id FI2104 Mekanika B: Gerak pada kerangka noninersial 29
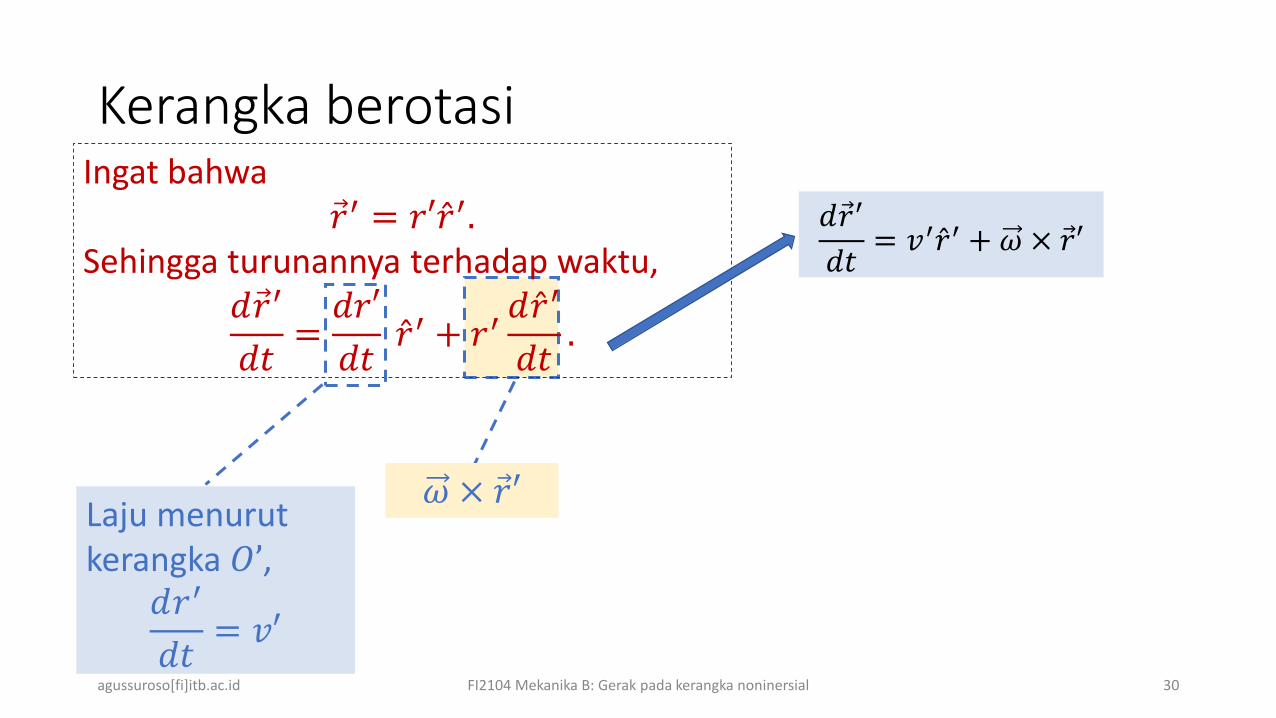
Kerangka berotasiIngat bahwa
Ԧ𝑟′ = 𝑟′ Ƹ𝑟′.Sehingga turunannya terhadap waktu,
𝑑 Ԧ𝑟′
𝑑𝑡=𝑑𝑟′
𝑑𝑡Ƹ𝑟′ + 𝑟′
𝑑 Ƹ𝑟′
𝑑𝑡.
𝑑 Ԧ𝑟′
𝑑𝑡= 𝑣′ Ƹ𝑟′ + 𝜔 × Ԧ𝑟′
Laju menurutkerangka 𝑂’,
𝑑𝑟′
𝑑𝑡= 𝑣′
𝜔 × Ԧ𝑟′
agussuroso[fi]itb.ac.id FI2104 Mekanika B: Gerak pada kerangka noninersial 30

Kerangka berotasiIngat bahwa
Ԧ𝑟′ = 𝑟′ Ƹ𝑟′.Sehingga turunannya terhadap waktu,
𝑑 Ԧ𝑟′
𝑑𝑡=𝑑𝑟′
𝑑𝑡Ƹ𝑟′ + 𝑟′
𝑑 Ƹ𝑟′
𝑑𝑡.
Laju menurutkerangka 𝑂’,
𝑑𝑟′
𝑑𝑡= 𝑣′
𝜔 × Ԧ𝑟′ Hasil ini dapat diperumum untuk sembarang
vektor 𝐵′ di koordinat 𝑂′,
𝑑𝐵′
𝑑𝑡=𝑑𝐵′
𝑑𝑡Ƹ𝑟′ + 𝜔 × 𝐵′
𝑑 Ԧ𝑟′
𝑑𝑡= 𝑣′ Ƹ𝑟′ + 𝜔 × Ԧ𝑟′
agussuroso[fi]itb.ac.id FI2104 Mekanika B: Gerak pada kerangka noninersial 31
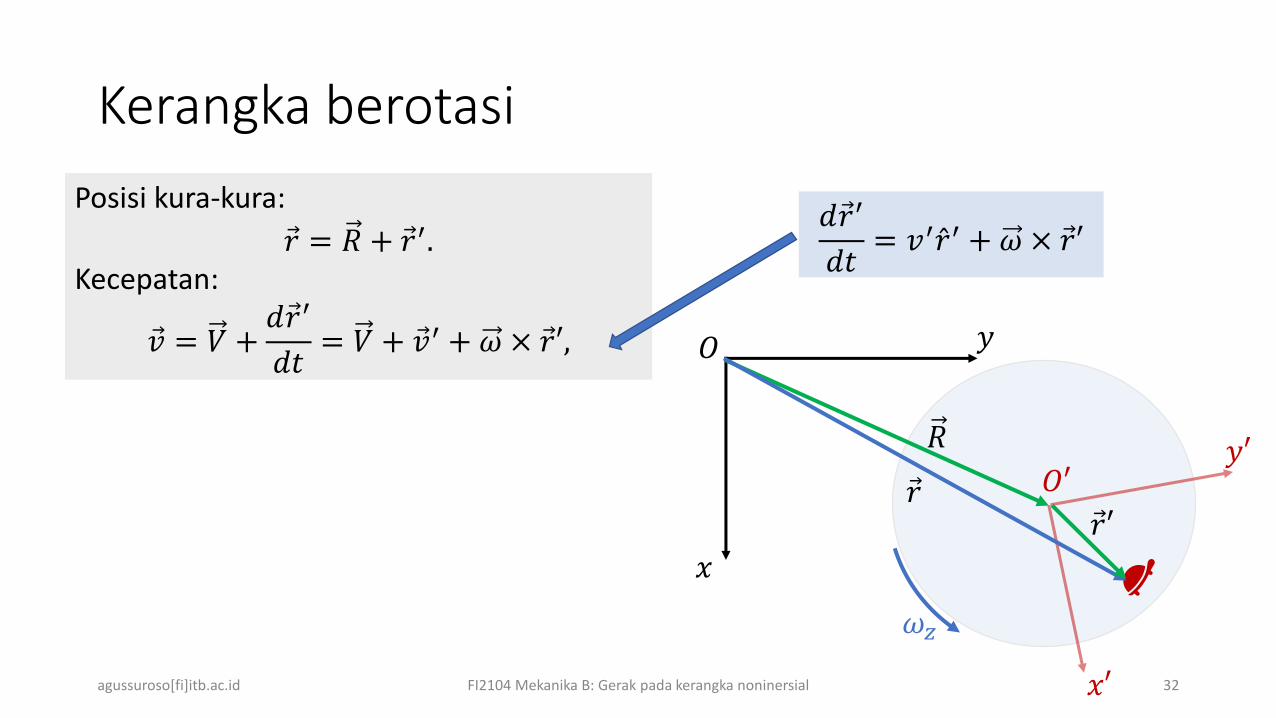
Kerangka berotasi
Posisi kura-kura:
Ԧ𝑟 = 𝑅 + Ԧ𝑟′.Kecepatan:
Ԧ𝑣 = 𝑉 +𝑑Ԧ𝑟′
𝑑𝑡= 𝑉 + Ԧ𝑣′ + 𝜔 × Ԧ𝑟′,
𝑥
𝑦
𝜔𝑧
𝑥′
𝑦′
𝑂
𝑂′
𝑅
Ԧ𝑟′Ԧ𝑟
𝑑 Ԧ𝑟′
𝑑𝑡= 𝑣′ Ƹ𝑟′ + 𝜔 × Ԧ𝑟′
agussuroso[fi]itb.ac.id FI2104 Mekanika B: Gerak pada kerangka noninersial 32

Kerangka berotasi
Posisi kura-kura:
Ԧ𝑟 = 𝑅 + Ԧ𝑟′.Kecepatan:
Ԧ𝑣 = 𝑉 +𝑑Ԧ𝑟′
𝑑𝑡= 𝑉 + Ԧ𝑣′ + 𝜔 × Ԧ𝑟′,
𝑥
𝑦
𝜔𝑧
𝑥′
𝑦′
𝑂
𝑂′
𝑅
Ԧ𝑟′Ԧ𝑟
𝑑 Ԧ𝑟′
𝑑𝑡= 𝑣′ Ƹ𝑟′ + 𝜔 × Ԧ𝑟′
Kecepatan menurut 𝑂.
agussuroso[fi]itb.ac.id FI2104 Mekanika B: Gerak pada kerangka noninersial 33

Kerangka berotasi
Posisi kura-kura:
Ԧ𝑟 = 𝑅 + Ԧ𝑟′.Kecepatan:
Ԧ𝑣 = 𝑉 +𝑑Ԧ𝑟′
𝑑𝑡= 𝑉 + Ԧ𝑣′ + 𝜔 × Ԧ𝑟′,
𝑥
𝑦
𝜔𝑧
𝑥′
𝑦′
𝑂
𝑂′
𝑅
Ԧ𝑟′Ԧ𝑟
𝑑 Ԧ𝑟′
𝑑𝑡= 𝑣′ Ƹ𝑟′ + 𝜔 × Ԧ𝑟′
Kecepatankerangka/cakram.
agussuroso[fi]itb.ac.id FI2104 Mekanika B: Gerak pada kerangka noninersial 34

Kerangka berotasi
Posisi kura-kura:
Ԧ𝑟 = 𝑅 + Ԧ𝑟′.Kecepatan:
Ԧ𝑣 = 𝑉 +𝑑Ԧ𝑟′
𝑑𝑡= 𝑉 + Ԧ𝑣′ + 𝜔 × Ԧ𝑟′,
𝑥
𝑦
𝜔𝑧
𝑥′
𝑦′
𝑂
𝑂′
𝑅
Ԧ𝑟′Ԧ𝑟
𝑑 Ԧ𝑟′
𝑑𝑡= 𝑣′ Ƹ𝑟′ + 𝜔 × Ԧ𝑟′
Kecepatanmenurut 𝑂’.
agussuroso[fi]itb.ac.id FI2104 Mekanika B: Gerak pada kerangka noninersial 35

Kerangka berotasi
Posisi kura-kura:
Ԧ𝑟 = 𝑅 + Ԧ𝑟′.Kecepatan:
Ԧ𝑣 = 𝑉 +𝑑Ԧ𝑟′
𝑑𝑡= 𝑉 + Ԧ𝑣′ + 𝜔 × Ԧ𝑟′,
𝑥
𝑦
𝜔𝑧
𝑥′
𝑦′
𝑂
𝑂′
𝑅
Ԧ𝑟′Ԧ𝑟
𝑑 Ԧ𝑟′
𝑑𝑡= 𝑣′ Ƹ𝑟′ + 𝜔 × Ԧ𝑟′
Kecepatanmenurut 𝑂’.
agussuroso[fi]itb.ac.id FI2104 Mekanika B: Gerak pada kerangka noninersial 36

Kerangka berotasi
Posisi kura-kura:
Ԧ𝑟 = 𝑅 + Ԧ𝑟′.Kecepatan:
Ԧ𝑣 = 𝑉 +𝑑Ԧ𝑟′
𝑑𝑡= 𝑉 + Ԧ𝑣′ + 𝜔 × Ԧ𝑟′,
𝑥
𝑦
𝜔𝑧
𝑥′
𝑦′
𝑂
𝑂′
𝑅
Ԧ𝑟′Ԧ𝑟
𝑑 Ԧ𝑟′
𝑑𝑡= 𝑣′ Ƹ𝑟′ + 𝜔 × Ԧ𝑟′
Kecepatan menurut 𝑂.
Kecepatanmenurut 𝑂’.Kecepatan
kerangka/cakram. Kecepatan
menurut 𝑂’.
agussuroso[fi]itb.ac.id FI2104 Mekanika B: Gerak pada kerangka noninersial 37
Kerangka berotasiPercepatan
agussuroso[fi]itb.ac.id FI2104 Mekanika B: Gerak pada kerangka noninersial 38

Kerangka berotasiPosisi kura-kura:
Ԧ𝑟 = 𝑅 + Ԧ𝑟′.Kecepatan:
Ԧ𝑣 = 𝑉 + Ԧ𝑣′ +𝜔 × Ԧ𝑟′.Percepatan:
Ԧ𝑎 =𝑑 Ԧ𝑣
𝑑𝑡=𝑑𝑉
𝑑𝑡+
𝑑
𝑑𝑡( Ԧ𝑣′ +𝜔 × Ԧ𝑟′)
𝑥
𝑦
𝜔𝑧
𝑥′
𝑦′
𝑂
𝑂′
𝑅
Ԧ𝑟′Ԧ𝑟
Ingat, untuk sembarang vektor 𝐵′ di koordinat 𝑂′,
𝑑𝐵′
𝑑𝑡=𝑑𝐵′
𝑑𝑡Ƹ𝑟′ +𝜔 × 𝐵′
agussuroso[fi]itb.ac.id FI2104 Mekanika B: Gerak pada kerangka noninersial 39
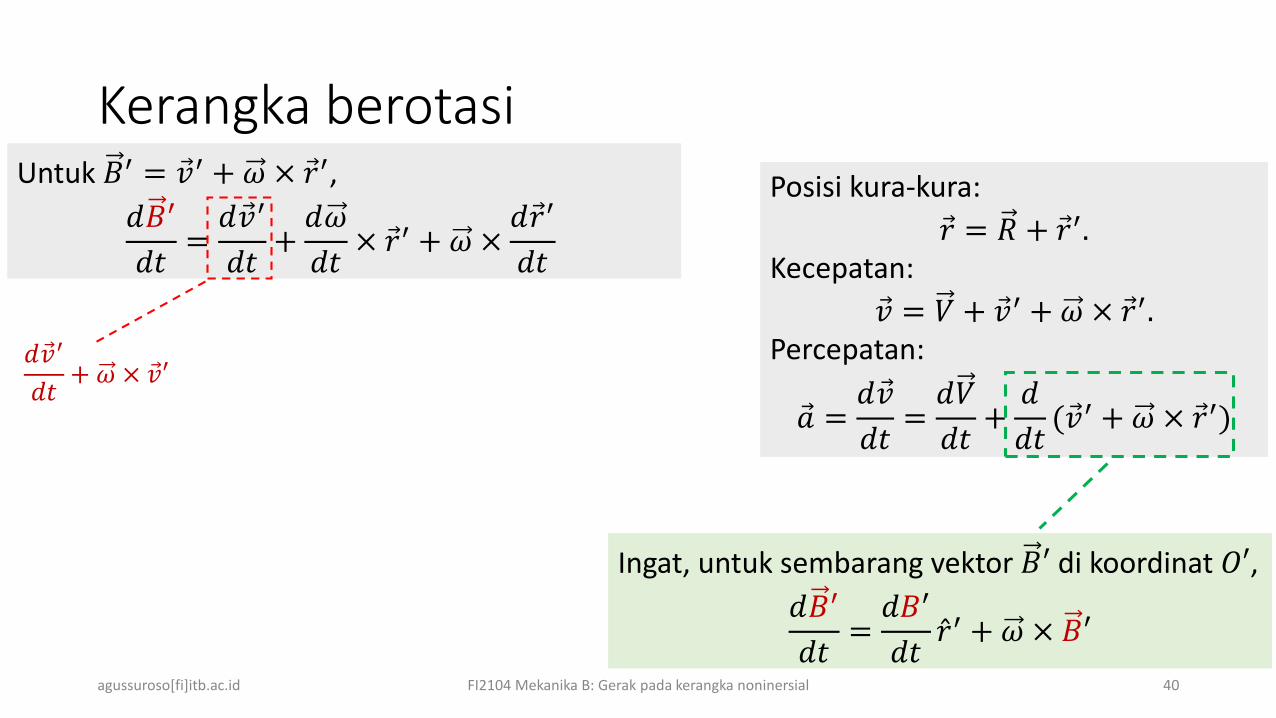
Kerangka berotasiPosisi kura-kura:
Ԧ𝑟 = 𝑅 + Ԧ𝑟′.Kecepatan:
Ԧ𝑣 = 𝑉 + Ԧ𝑣′ +𝜔 × Ԧ𝑟′.Percepatan:
Ԧ𝑎 =𝑑 Ԧ𝑣
𝑑𝑡=𝑑𝑉
𝑑𝑡+
𝑑
𝑑𝑡( Ԧ𝑣′ +𝜔 × Ԧ𝑟′)
Ingat, untuk sembarang vektor 𝐵′ di koordinat 𝑂′,
𝑑𝐵′
𝑑𝑡=𝑑𝐵′
𝑑𝑡Ƹ𝑟′ +𝜔 × 𝐵′
Untuk 𝐵′ = Ԧ𝑣′ +𝜔 × Ԧ𝑟′,
𝑑𝐵′
𝑑𝑡=𝑑 Ԧ𝑣′
𝑑𝑡+𝑑𝜔
𝑑𝑡× Ԧ𝑟′ + 𝜔 ×
𝑑Ԧ𝑟′
𝑑𝑡
𝑑 Ԧ𝑣′
𝑑𝑡+ 𝜔 × Ԧ𝑣′
agussuroso[fi]itb.ac.id FI2104 Mekanika B: Gerak pada kerangka noninersial 40

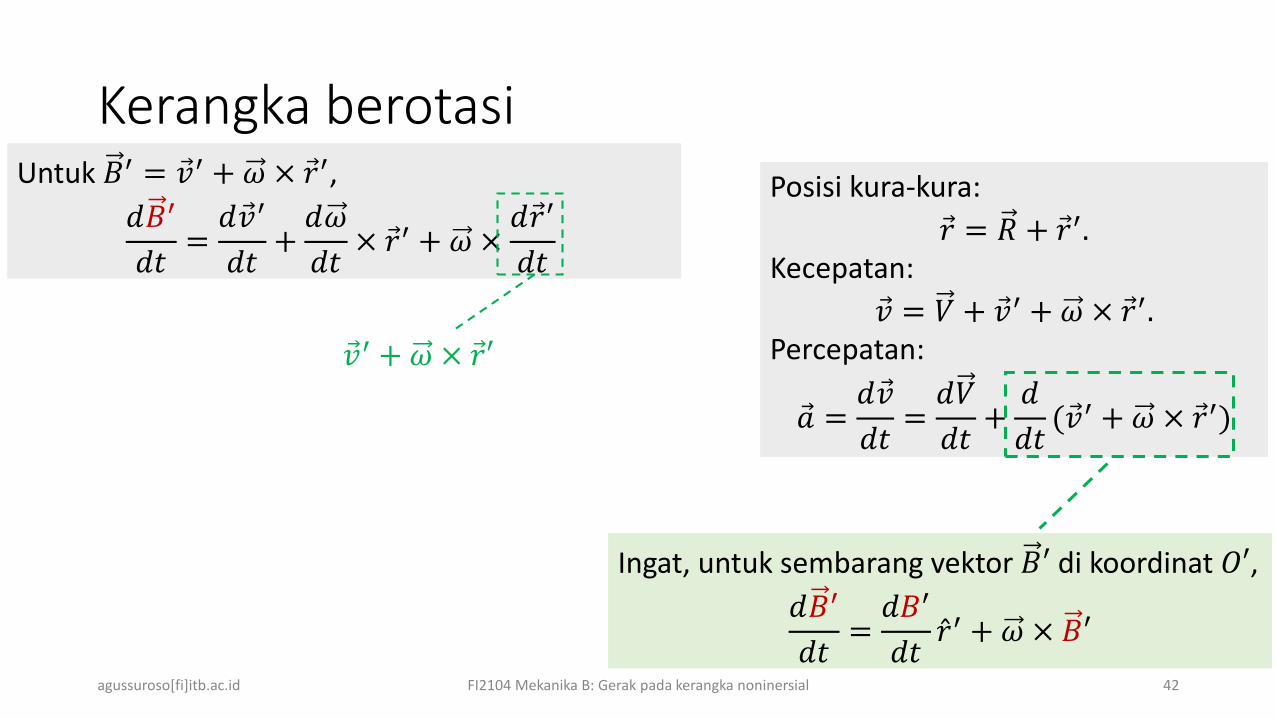
Kerangka berotasiPosisi kura-kura:
Ԧ𝑟 = 𝑅 + Ԧ𝑟′.Kecepatan:
Ԧ𝑣 = 𝑉 + Ԧ𝑣′ +𝜔 × Ԧ𝑟′.Percepatan:
Ԧ𝑎 =𝑑 Ԧ𝑣
𝑑𝑡=𝑑𝑉
𝑑𝑡+
𝑑
𝑑𝑡( Ԧ𝑣′ +𝜔 × Ԧ𝑟′)
Ingat, untuk sembarang vektor 𝐵′ di koordinat 𝑂′,
𝑑𝐵′
𝑑𝑡=𝑑𝐵′
𝑑𝑡Ƹ𝑟′ +𝜔 × 𝐵′
Untuk 𝐵′ = Ԧ𝑣′ +𝜔 × Ԧ𝑟′,
𝑑𝐵′
𝑑𝑡=𝑑 Ԧ𝑣′
𝑑𝑡+𝑑𝜔
𝑑𝑡× Ԧ𝑟′ + 𝜔 ×
𝑑Ԧ𝑟′
𝑑𝑡
Ԧ𝛼
agussuroso[fi]itb.ac.id FI2104 Mekanika B: Gerak pada kerangka noninersial 41
Kerangka berotasiPosisi kura-kura:
Ԧ𝑟 = 𝑅 + Ԧ𝑟′.Kecepatan:
Ԧ𝑣 = 𝑉 + Ԧ𝑣′ +𝜔 × Ԧ𝑟′.Percepatan:
Ԧ𝑎 =𝑑 Ԧ𝑣
𝑑𝑡=𝑑𝑉
𝑑𝑡+
𝑑
𝑑𝑡( Ԧ𝑣′ +𝜔 × Ԧ𝑟′)
Ingat, untuk sembarang vektor 𝐵′ di koordinat 𝑂′,
𝑑𝐵′
𝑑𝑡=𝑑𝐵′
𝑑𝑡Ƹ𝑟′ +𝜔 × 𝐵′
Untuk 𝐵′ = Ԧ𝑣′ +𝜔 × Ԧ𝑟′,
𝑑𝐵′
𝑑𝑡=𝑑 Ԧ𝑣′
𝑑𝑡+𝑑𝜔
𝑑𝑡× Ԧ𝑟′ + 𝜔 ×
𝑑Ԧ𝑟′
𝑑𝑡
Ԧ𝑣′ +𝜔 × Ԧ𝑟′
agussuroso[fi]itb.ac.id FI2104 Mekanika B: Gerak pada kerangka noninersial 42
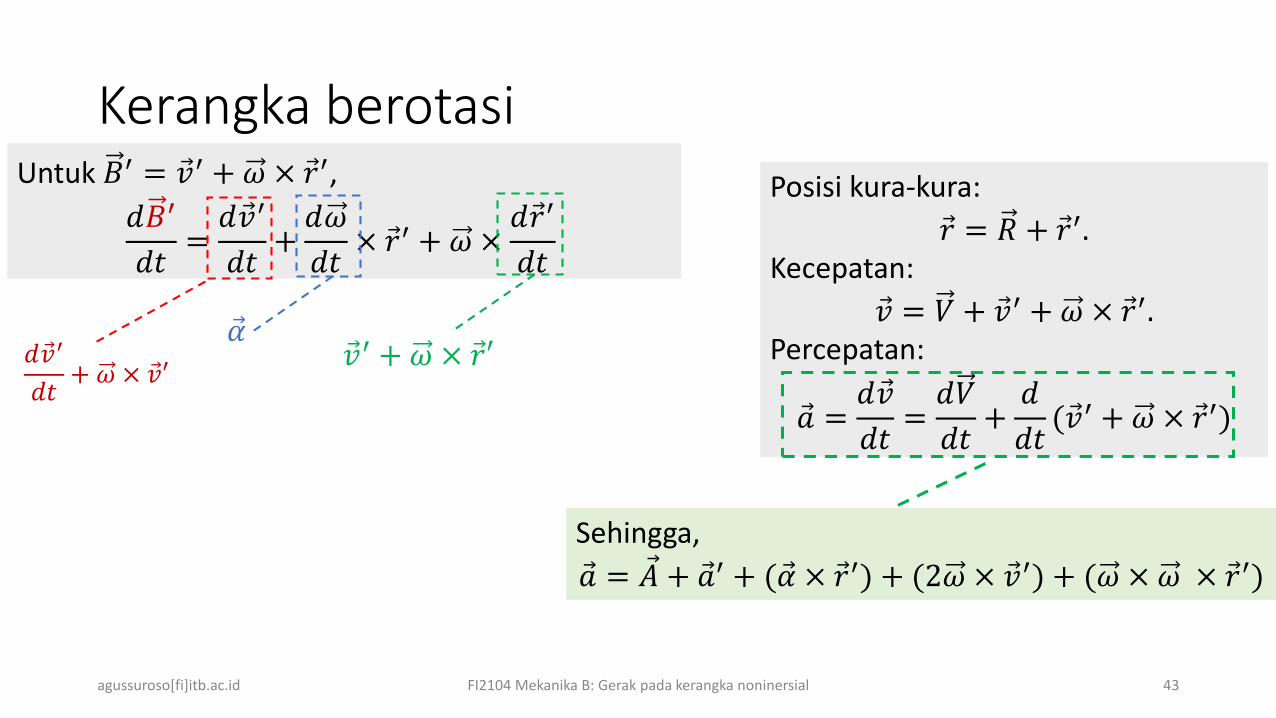
Kerangka berotasiPosisi kura-kura:
Ԧ𝑟 = 𝑅 + Ԧ𝑟′.Kecepatan:
Ԧ𝑣 = 𝑉 + Ԧ𝑣′ +𝜔 × Ԧ𝑟′.Percepatan:
Ԧ𝑎 =𝑑 Ԧ𝑣
𝑑𝑡=𝑑𝑉
𝑑𝑡+
𝑑
𝑑𝑡( Ԧ𝑣′ +𝜔 × Ԧ𝑟′)
Untuk 𝐵′ = Ԧ𝑣′ +𝜔 × Ԧ𝑟′,
𝑑𝐵′
𝑑𝑡=𝑑 Ԧ𝑣′
𝑑𝑡+𝑑𝜔
𝑑𝑡× Ԧ𝑟′ + 𝜔 ×
𝑑Ԧ𝑟′
𝑑𝑡
𝑑 Ԧ𝑣′
𝑑𝑡+ 𝜔 × Ԧ𝑣′
Ԧ𝛼Ԧ𝑣′ +𝜔 × Ԧ𝑟′
Sehingga,
Ԧ𝑎 = Ԧ𝐴 + Ԧ𝑎′ + ( Ԧ𝛼 × Ԧ𝑟′) + (2𝜔 × Ԧ𝑣′) + (𝜔 × 𝜔 × Ԧ𝑟′)
agussuroso[fi]itb.ac.id FI2104 Mekanika B: Gerak pada kerangka noninersial 43
Kerangka berotasi
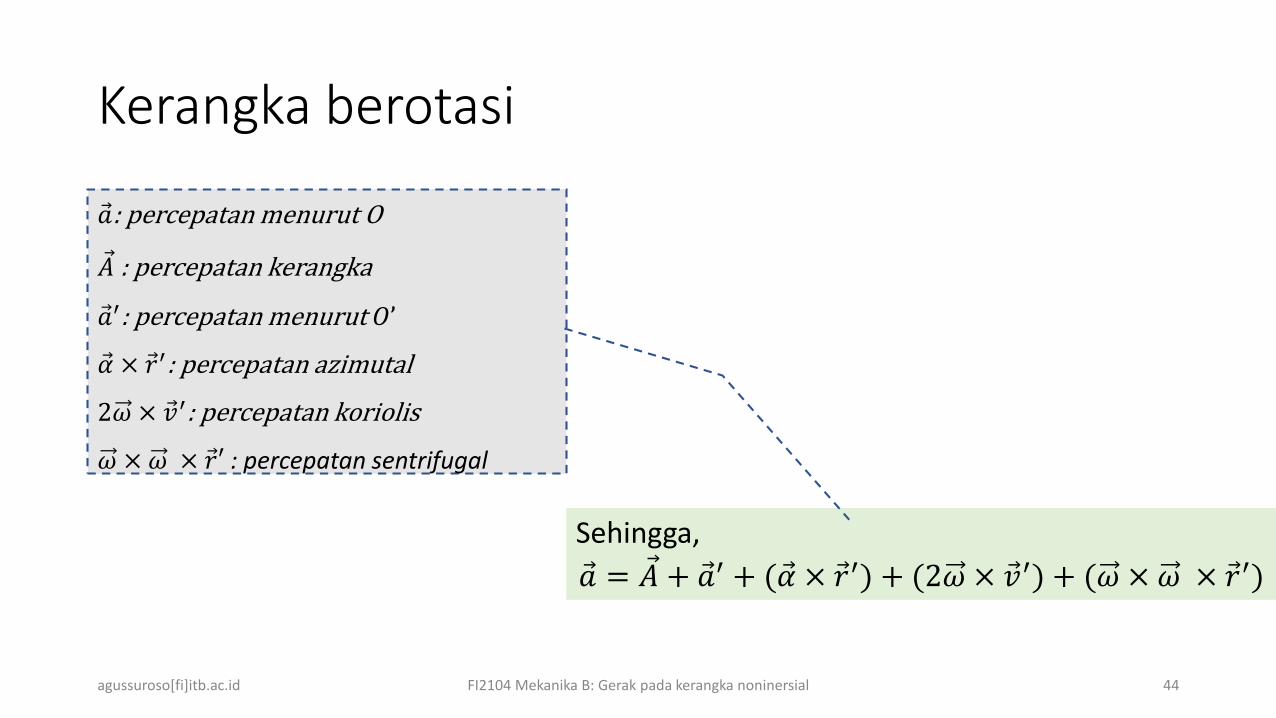
Sehingga,
Ԧ𝑎 = Ԧ𝐴 + Ԧ𝑎′ + ( Ԧ𝛼 × Ԧ𝑟′) + (2𝜔 × Ԧ𝑣′) + (𝜔 × 𝜔 × Ԧ𝑟′)
Ԧ𝑎: percepatan menurut O
Ԧ𝐴 : percepatan kerangka
Ԧ𝑎′: percepatan menurut 𝑂’
Ԧ𝛼 × Ԧ𝑟′: percepatan azimutal
2𝜔 × Ԧ𝑣′: percepatan koriolis
𝜔 ×𝜔 × Ԧ𝑟′ : percepatan sentrifugal
agussuroso[fi]itb.ac.id FI2104 Mekanika B: Gerak pada kerangka noninersial 44
Gaya Fiktif
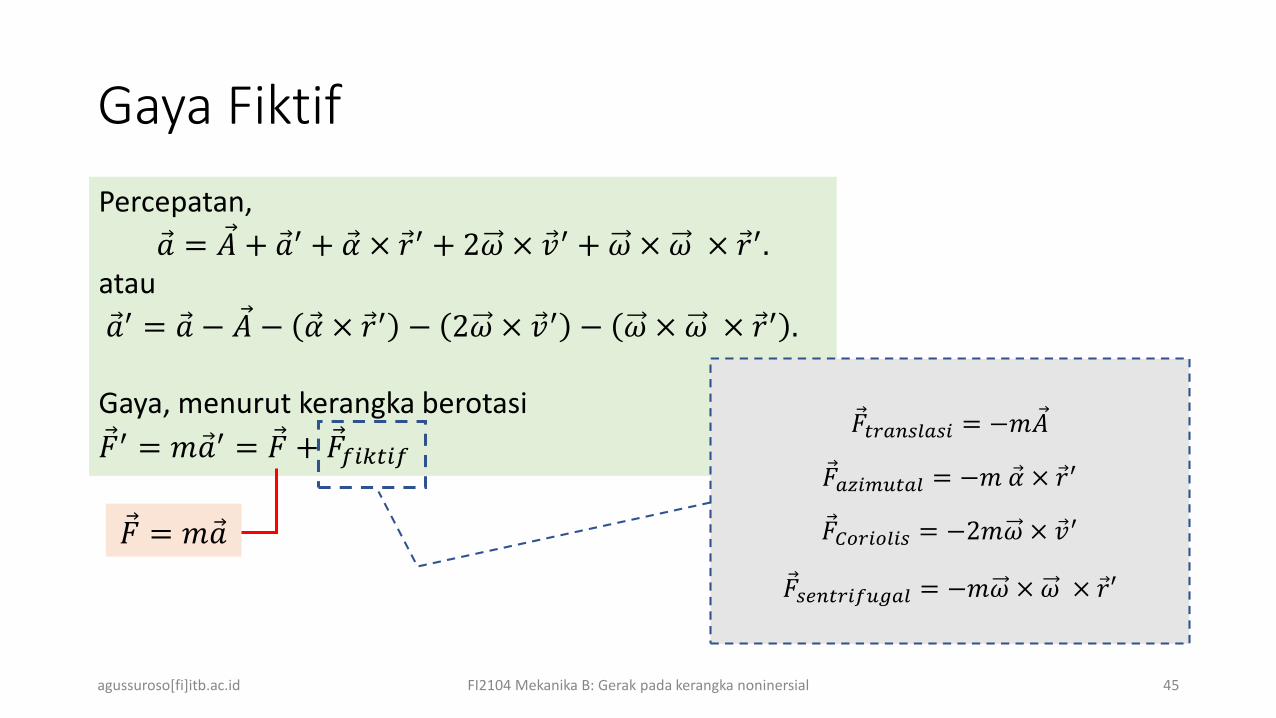
Percepatan,
Ԧ𝑎 = Ԧ𝐴 + Ԧ𝑎′ + Ԧ𝛼 × Ԧ𝑟′ + 2𝜔 × Ԧ𝑣′ + 𝜔 × 𝜔 × Ԧ𝑟′.atau
Ԧ𝑎′ = Ԧ𝑎 − Ԧ𝐴 − Ԧ𝛼 × Ԧ𝑟′ − 2𝜔 × Ԧ𝑣′ − 𝜔 × 𝜔 × Ԧ𝑟′ .
Gaya, menurut kerangka berotasiԦ𝐹′ = 𝑚 Ԧ𝑎′ = Ԧ𝐹 + Ԧ𝐹𝑓𝑖𝑘𝑡𝑖𝑓
Ԧ𝐹𝑡𝑟𝑎𝑛𝑠𝑙𝑎𝑠𝑖 = −𝑚 Ԧ𝐴
Ԧ𝐹𝑎𝑧𝑖𝑚𝑢𝑡𝑎𝑙 = −𝑚 Ԧ𝛼 × Ԧ𝑟′
Ԧ𝐹𝐶𝑜𝑟𝑖𝑜𝑙𝑖𝑠 = −2𝑚𝜔 × Ԧ𝑣′
Ԧ𝐹𝑠𝑒𝑛𝑡𝑟𝑖𝑓𝑢𝑔𝑎𝑙 = −𝑚𝜔 ×𝜔 × Ԧ𝑟′
Ԧ𝐹 = 𝑚 Ԧ𝑎
FI2104 Mekanika B: Gerak pada kerangka noninersialagussuroso[fi]itb.ac.id 45

Latihan
agussuroso[fi]itb.ac.id FI2104 Mekanika B: Gerak pada kerangka noninersial 46

Soal 1
Perhatikan gambar di samping. Semua sistem licin.
a) Jika kereta 𝑀 bergerak kekanan dengan percepatan 𝑎0, tentukan gaya fiktif yang dialami oleh 𝑚1.
b) Tentukan nilai 𝑎0 agar benda𝑚1 diam terhadap kereta.
agussuroso[fi]itb.ac.id FI2104 Mekanika B: Gerak pada kerangka noninersial 47
𝑀 𝑚2
𝑚1

Kerangka kereta dipercepat kekanan sebesar 𝑎0, sehingga 𝑚1mengalami gaya fiktif berupa gayatranslasi
Ԧ𝐹𝑡𝑟𝑎𝑛𝑠𝑙𝑎𝑠𝑖 = −𝑚1 Ԧ𝑎0
agussuroso[fi]itb.ac.id FI2104 Mekanika B: Gerak pada kerangka noninersial 48
𝑀
𝑚1
Solusi 1 a) Gaya fiktif pada 𝑚1 b) 𝑎0 agar 𝑚1 diam terhadap 𝑀
Ԧ𝐹𝑡𝑟𝑎𝑛𝑠𝑙𝑎𝑠𝑖 = −𝑚1𝑎0
𝑎0

Menurut kerangka kereta, keduabenda diam, jadi
𝑚2𝑔 − 𝑇 = 0𝑇 −𝑚1𝑎0 = 0
Dari kedua persamaan di atas, diperoleh
𝑎0 =𝑚2
𝑚1𝑔
agussuroso[fi]itb.ac.id FI2104 Mekanika B: Gerak pada kerangka noninersial 49
𝑚1
Solusi 1 a) Gaya fiktif pada 𝑚1 b) 𝑎0 agar 𝑚1 diam terhadap 𝑀
𝑚1𝑎0
𝑎0𝑚2
𝑇 𝑇
𝑚2𝑔
𝑀

Soal 2
Balok 𝑚 diletakkan di atas permukaan papan 𝑀 yang kasar.
Jika papan 𝑀 dipercepat ke kanan dengan percepatan 𝑎0, tentukan koefisien gesek statik antara 𝑚 dengan 𝑀 agar balok𝑚 diam di atas papan tanpa tergelincir ke kiri.
Abaikan gesekan antara lantai dengan papan 𝑀.
agussuroso[fi]itb.ac.id FI2104 Mekanika B: Gerak pada kerangka noninersial 50

Papan dipercepat ke kanan, sehingga balok mengalami gayafiktif sebesar 𝑚𝑎0 ke kiri.
Balok juga mengalami gaya gesek ke kanan sebesar 𝑓 = 𝜇𝑚𝑔.
Agar balok diam,
𝜇𝑚𝑔 −𝑚𝑎0 = 0 ⇒ 𝜇 =𝑎0𝑔
agussuroso[fi]itb.ac.id FI2104 Mekanika B: Gerak pada kerangka noninersial 51
Solusi 2 𝑓
𝑀
𝑚𝑎0
𝑎0

Soal 3
Sebuah cakram berputar dengan kecepatan
𝜔 𝑡 = 𝑡2 − 2𝑡 + 1.
Seekor serangga berjalan di atas cakram itu secara radial menuju pusatcakram, dengan laju konstan sebesar 𝑢. Mula-mula (saat 𝑡 = 0) serangga berada pada jarak 𝑅 dari pusat.
a) Tentukan pada 𝑡 berapa serangga mencapai jarak𝑅
2dari pusat
cakram.
b) Identifikasi gaya-gaya fiktif yang bekerja pada serangga tersebut. Tentukan besar dan arah dari masing-masing gaya tersebut.
agussuroso[fi]itb.ac.id FI2104 Mekanika B: Gerak pada kerangka noninersial 52

agussuroso[fi]itb.ac.id FI2104 Mekanika B: Gerak pada kerangka noninersial 53
Solusi 2 a) serangga mencapai jarak 𝑅/2 b) Identifikasi gaya fiktif
𝜔
𝑦′
𝑥′
𝑧′
𝑂′
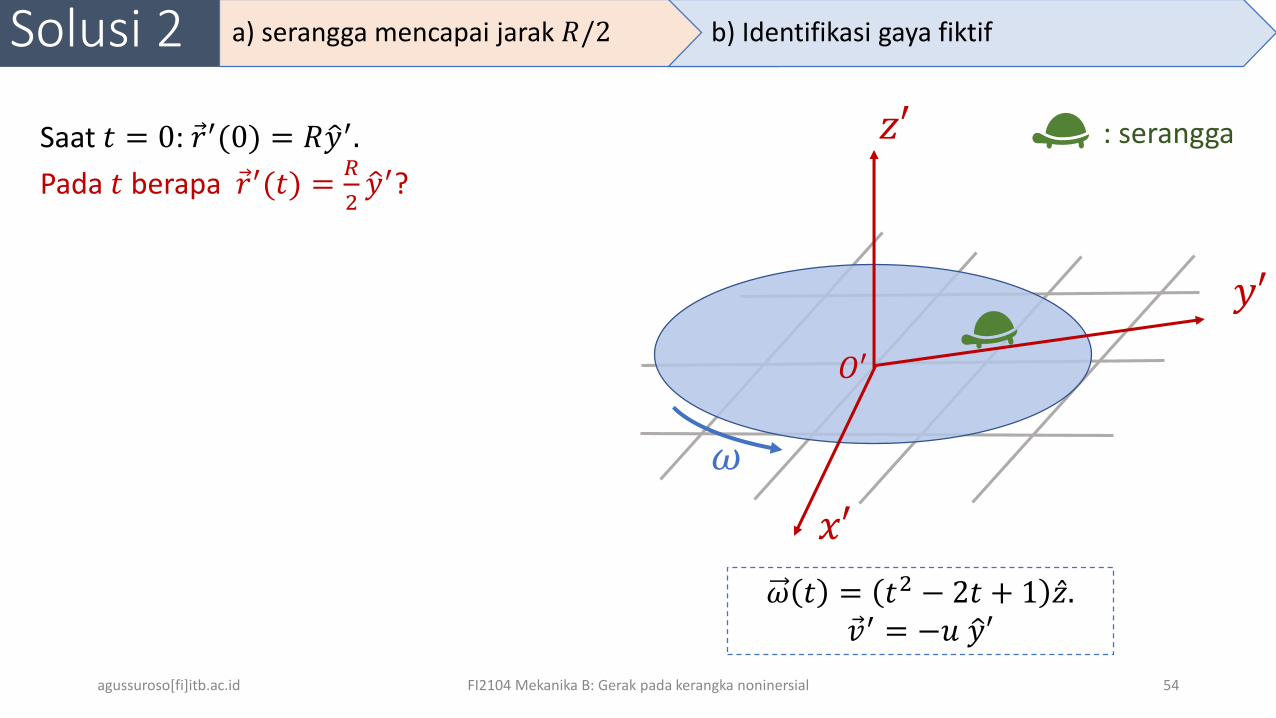
: seranggaMisal cakram berputar terhadap sumbu-𝑧dan serangga bergerak sepanjang sumbu 𝑦′.
Kecepatan sudut cakram: 𝜔 𝑡 = 𝑡2 − 2𝑡 + 1 Ƹ𝑧.
Kecepatan gerak serangga terhadapcakram:
Ԧ𝑣′ = −𝑢 ො𝑦′
agussuroso[fi]itb.ac.id FI2104 Mekanika B: Gerak pada kerangka noninersial 54
Solusi 2 a) serangga mencapai jarak 𝑅/2 b) Identifikasi gaya fiktif
𝜔 𝑡 = 𝑡2 − 2𝑡 + 1 Ƹ𝑧.Ԧ𝑣′ = −𝑢 ො𝑦′
Saat 𝑡 = 0: Ԧ𝑟′(0) = 𝑅 ො𝑦′.
Pada 𝑡 berapa Ԧ𝑟′(𝑡) =𝑅
2ො𝑦′?
𝜔
𝑦′
𝑥′
𝑧′
𝑂′
: serangga

agussuroso[fi]itb.ac.id FI2104 Mekanika B: Gerak pada kerangka noninersial 55
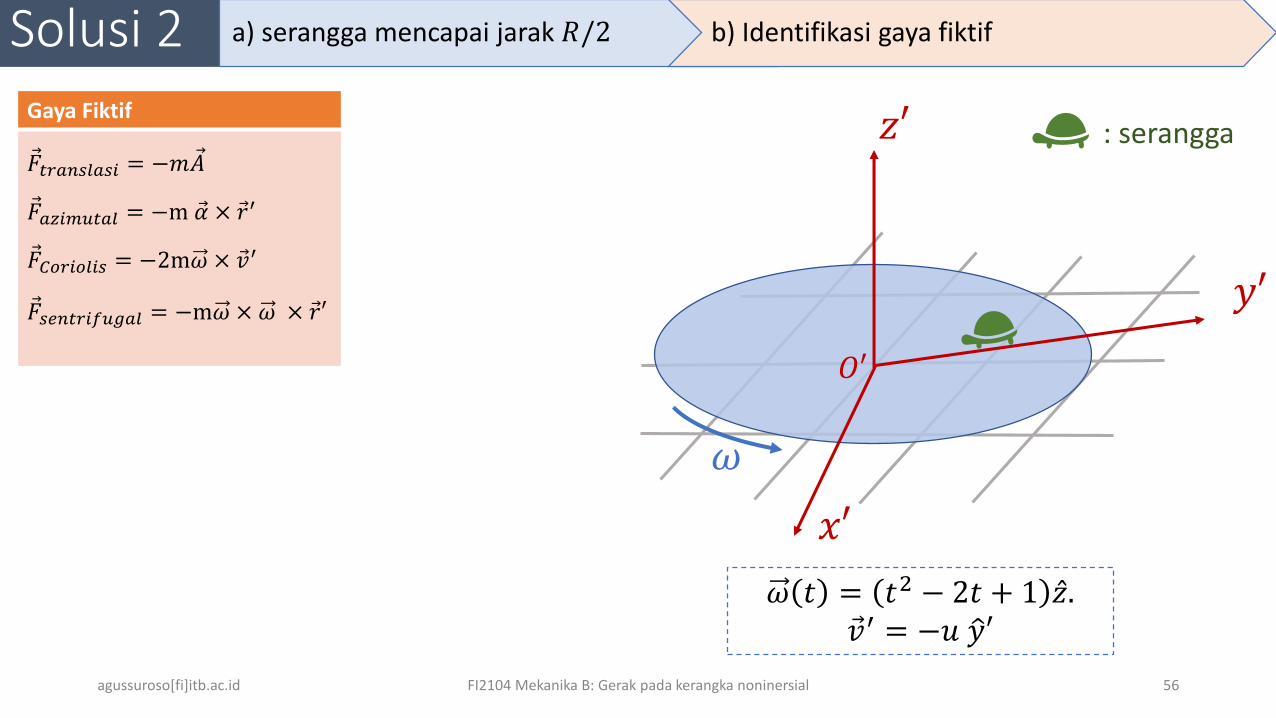
Solusi 2 a) serangga mencapai jarak 𝑅/2 b) Identifikasi gaya fiktif
𝜔 𝑡 = 𝑡2 − 2𝑡 + 1 Ƹ𝑧.Ԧ𝑣′ = −𝑢 ො𝑦′
Saat 𝑡 = 0: Ԧ𝑟′(0) = 𝑅 ො𝑦′.
Pada 𝑡 berapa Ԧ𝑟′(𝑡) =𝑅
2ො𝑦′?
Gunakan persamaan kinematika
Ԧ𝑟′ 𝑡 = Ԧ𝑟′ 0 +න0
𝑡
𝑢 𝑑𝑡,
untuk mendapatkan
𝑡 =𝑅
2𝑢. 𝜔
𝑦′
𝑥′
𝑧′
𝑂′
: serangga
agussuroso[fi]itb.ac.id FI2104 Mekanika B: Gerak pada kerangka noninersial 56
Solusi 2 a) serangga mencapai jarak 𝑅/2 b) Identifikasi gaya fiktif
Gaya Fiktif
Ԧ𝐹𝑡𝑟𝑎𝑛𝑠𝑙𝑎𝑠𝑖 = −𝑚 Ԧ𝐴
Ԧ𝐹𝑎𝑧𝑖𝑚𝑢𝑡𝑎𝑙 = −m Ԧ𝛼 × Ԧ𝑟′
Ԧ𝐹𝐶𝑜𝑟𝑖𝑜𝑙𝑖𝑠 = −2m𝜔 × Ԧ𝑣′
Ԧ𝐹𝑠𝑒𝑛𝑡𝑟𝑖𝑓𝑢𝑔𝑎𝑙 = −m𝜔 × 𝜔 × Ԧ𝑟′
𝜔 𝑡 = 𝑡2 − 2𝑡 + 1 Ƹ𝑧.Ԧ𝑣′ = −𝑢 ො𝑦′
𝜔
𝑦′
𝑥′
𝑧′
𝑂′
: serangga

agussuroso[fi]itb.ac.id FI2104 Mekanika B: Gerak pada kerangka noninersial 57
Solusi 2 a) serangga mencapai jarak 𝑅/2 b) Identifikasi gaya fiktif
Gaya Fiktif
𝑭𝒕𝒓𝒂𝒏𝒔𝒍𝒂𝒔𝒊 = −𝒎𝑨 = 𝟎
Ԧ𝐹𝑎𝑧𝑖𝑚𝑢𝑡𝑎𝑙 = −𝑚 Ԧ𝛼 × Ԧ𝑟′
Ԧ𝐹𝐶𝑜𝑟𝑖𝑜𝑙𝑖𝑠 = −2𝑚𝜔 × Ԧ𝑣′
Ԧ𝐹𝑠𝑒𝑛𝑡𝑟𝑖𝑓𝑢𝑔𝑎𝑙 = −𝑚𝜔 × 𝜔 × Ԧ𝑟′
Karena 𝐴 = 0.
𝜔 𝑡 = 𝑡2 − 2𝑡 + 1 Ƹ𝑧.Ԧ𝑣′ = −𝑢 ො𝑦′
𝜔
𝑦′
𝑥′
𝑧′
𝑂′
: serangga
agussuroso[fi]itb.ac.id FI2104 Mekanika B: Gerak pada kerangka noninersial 58
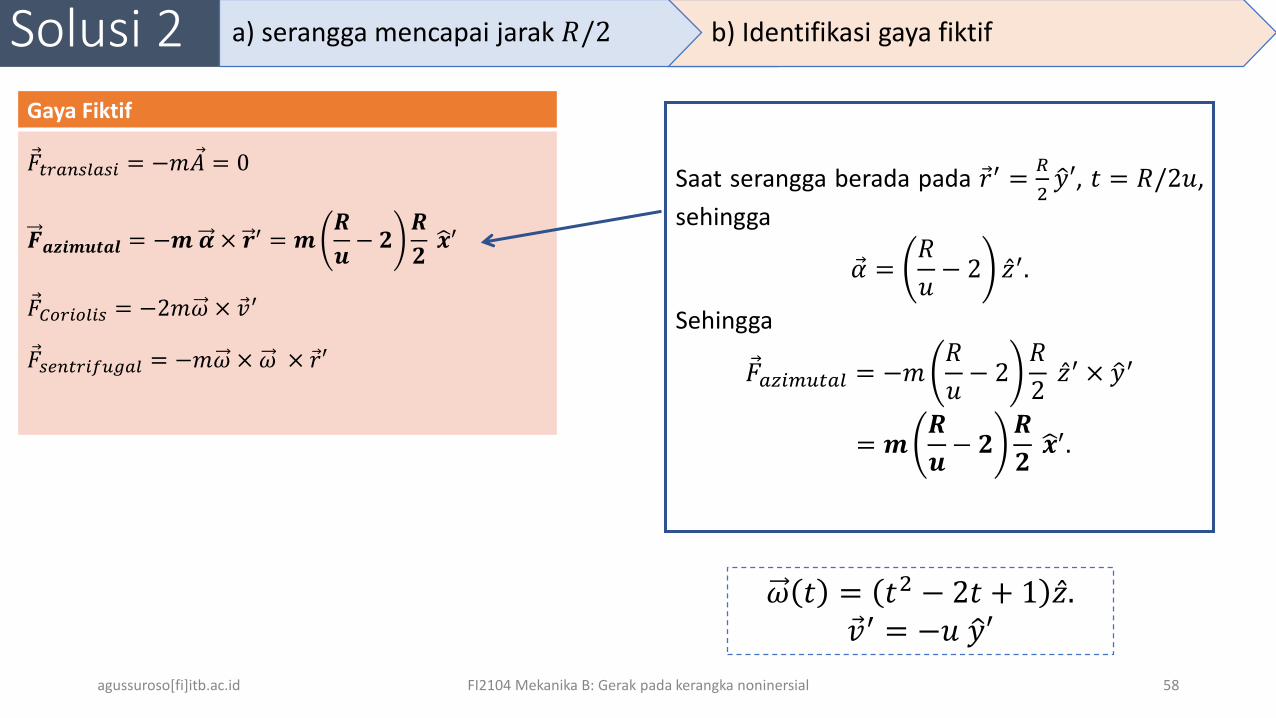
Solusi 2 a) serangga mencapai jarak 𝑅/2 b) Identifikasi gaya fiktif
𝜔 𝑡 = 𝑡2 − 2𝑡 + 1 Ƹ𝑧.Ԧ𝑣′ = −𝑢 ො𝑦′
Gaya Fiktif
Ԧ𝐹𝑡𝑟𝑎𝑛𝑠𝑙𝑎𝑠𝑖 = −𝑚 Ԧ𝐴 = 0
𝑭𝒂𝒛𝒊𝒎𝒖𝒕𝒂𝒍 = −𝒎 𝜶 × 𝒓′ = 𝒎𝑹
𝒖− 𝟐
𝑹
𝟐ෝ𝒙′
Ԧ𝐹𝐶𝑜𝑟𝑖𝑜𝑙𝑖𝑠 = −2𝑚𝜔 × Ԧ𝑣′
Ԧ𝐹𝑠𝑒𝑛𝑡𝑟𝑖𝑓𝑢𝑔𝑎𝑙 = −𝑚𝜔 × 𝜔 × Ԧ𝑟′
Saat serangga berada pada Ԧ𝑟′ =𝑅
2ො𝑦′, 𝑡 = 𝑅/2𝑢,
sehingga
Ԧ𝛼 =𝑅
𝑢− 2 Ƹ𝑧′.
Sehingga
Ԧ𝐹𝑎𝑧𝑖𝑚𝑢𝑡𝑎𝑙 = −𝑚𝑅
𝑢− 2
𝑅
2Ƹ𝑧′ × ො𝑦′
= 𝒎𝑹
𝒖− 𝟐
𝑹
𝟐ෝ𝒙′.

agussuroso[fi]itb.ac.id FI2104 Mekanika B: Gerak pada kerangka noninersial 59
Solusi 2 a) serangga mencapai jarak 𝑅/2 b) Identifikasi gaya fiktif
Gaya Fiktif
Ԧ𝐹𝑡𝑟𝑎𝑛𝑠𝑙𝑎𝑠𝑖 = −𝑚 Ԧ𝐴 = 0
Ԧ𝐹𝑎𝑧𝑖𝑚𝑢𝑡𝑎𝑙 = −𝑚 Ԧ𝛼 × Ԧ𝑟′ = 𝑚𝑅
𝑢− 2
𝑅
2ො𝑥′
𝑭𝑪𝒐𝒓𝒊𝒐𝒍𝒊𝒔 = −𝟐𝒎𝝎× 𝒗′ = −𝟐𝒎𝒖𝑹
𝒖− 𝟏
𝟐
ෝ𝒙′
Ԧ𝐹𝑠𝑒𝑛𝑡𝑟𝑖𝑓𝑢𝑔𝑎𝑙 = −𝑚𝜔 × 𝜔 × Ԧ𝑟′
𝜔 𝑡 = 𝑡2 − 2𝑡 + 1 Ƹ𝑧.Ԧ𝑣′ = −𝑢 ො𝑦′
Saat serangga berada pada Ԧ𝑟′ =𝑅
2ො𝑦′, 𝑡 = 𝑅/2𝑢′,
sehingga
𝜔 =𝑅
𝑢− 1
2
Ƹ𝑧′.
Sehingga
Ԧ𝐹𝐶𝑜𝑟𝑖𝑜𝑙𝑖𝑠 = −2𝑚𝑅
𝑢− 1
2
Ƹ𝑧′ × (−𝑢 ො𝑦′)
= −𝟐𝒎𝑹
𝒖− 𝟏
𝟐
𝒖 ෝ𝒙′.
agussuroso[fi]itb.ac.id FI2104 Mekanika B: Gerak pada kerangka noninersial 60
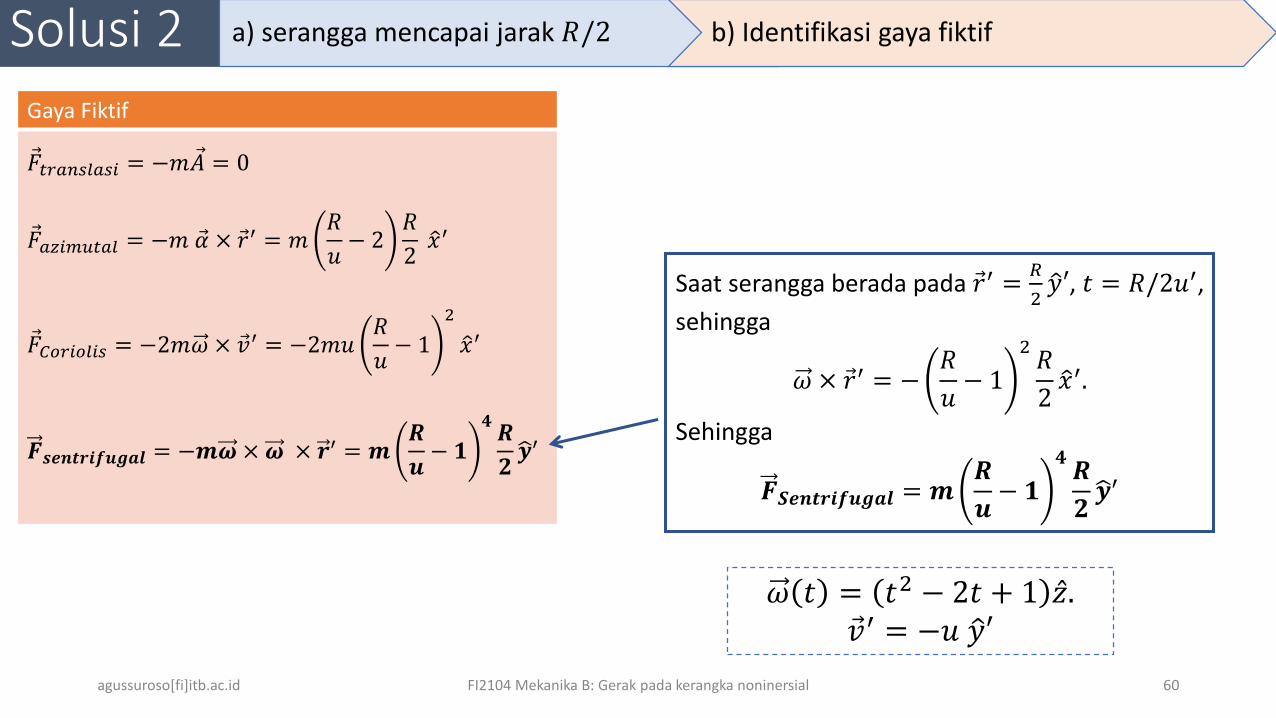
Solusi 2 a) serangga mencapai jarak 𝑅/2 b) Identifikasi gaya fiktif
Gaya Fiktif
Ԧ𝐹𝑡𝑟𝑎𝑛𝑠𝑙𝑎𝑠𝑖 = −𝑚 Ԧ𝐴 = 0
Ԧ𝐹𝑎𝑧𝑖𝑚𝑢𝑡𝑎𝑙 = −𝑚 Ԧ𝛼 × Ԧ𝑟′ = 𝑚𝑅
𝑢− 2
𝑅
2ො𝑥′
Ԧ𝐹𝐶𝑜𝑟𝑖𝑜𝑙𝑖𝑠 = −2𝑚𝜔 × Ԧ𝑣′ = −2𝑚𝑢𝑅
𝑢− 1
2
ො𝑥′
𝑭𝒔𝒆𝒏𝒕𝒓𝒊𝒇𝒖𝒈𝒂𝒍 = −𝒎𝝎×𝝎 × 𝒓′ = 𝒎𝑹
𝒖− 𝟏
𝟒𝑹
𝟐ෝ𝒚′
𝜔 𝑡 = 𝑡2 − 2𝑡 + 1 Ƹ𝑧.Ԧ𝑣′ = −𝑢 ො𝑦′
Saat serangga berada pada Ԧ𝑟′ =𝑅
2ො𝑦′, 𝑡 = 𝑅/2𝑢′,
sehingga
𝜔 × Ԧ𝑟′ = −𝑅
𝑢− 1
2𝑅
2ො𝑥′.
Sehingga
𝑭𝑺𝒆𝒏𝒕𝒓𝒊𝒇𝒖𝒈𝒂𝒍 = 𝒎𝑹
𝒖− 𝟏
𝟒𝑹
𝟐ෝ𝒚′

agussuroso[fi]itb.ac.id FI2104 Mekanika B: Gerak pada kerangka noninersial 61
Solusi 2 a) serangga mencapai jarak 𝑅/2 b) Identifikasi gaya fiktif
Gaya Fiktif
Ԧ𝐹𝑡𝑟𝑎𝑛𝑠𝑙𝑎𝑠𝑖 = −𝑚 Ԧ𝐴 = 0
Ԧ𝐹𝑎𝑧𝑖𝑚𝑢𝑡𝑎𝑙 = −𝑚 Ԧ𝛼 × Ԧ𝑟′ = 𝑚𝑅
𝑢− 2
𝑅
2ො𝑥′
Ԧ𝐹𝐶𝑜𝑟𝑖𝑜𝑙𝑖𝑠 = −2𝑚𝜔 × Ԧ𝑣′ = −2𝑚𝑅
𝑢− 2 𝑢 ො𝑥′
𝑭𝒔𝒆𝒏𝒕𝒓𝒊𝒇𝒖𝒈𝒂𝒍 = −𝒎𝝎×𝝎 × 𝒓′ = 𝒎𝑹
𝒖− 𝟏
𝟒𝑹
𝟐ෝ𝒚′
Sehingga, gaya fiktif total yang dialami olehserangga adalah jumlahan dari empat suku ini.
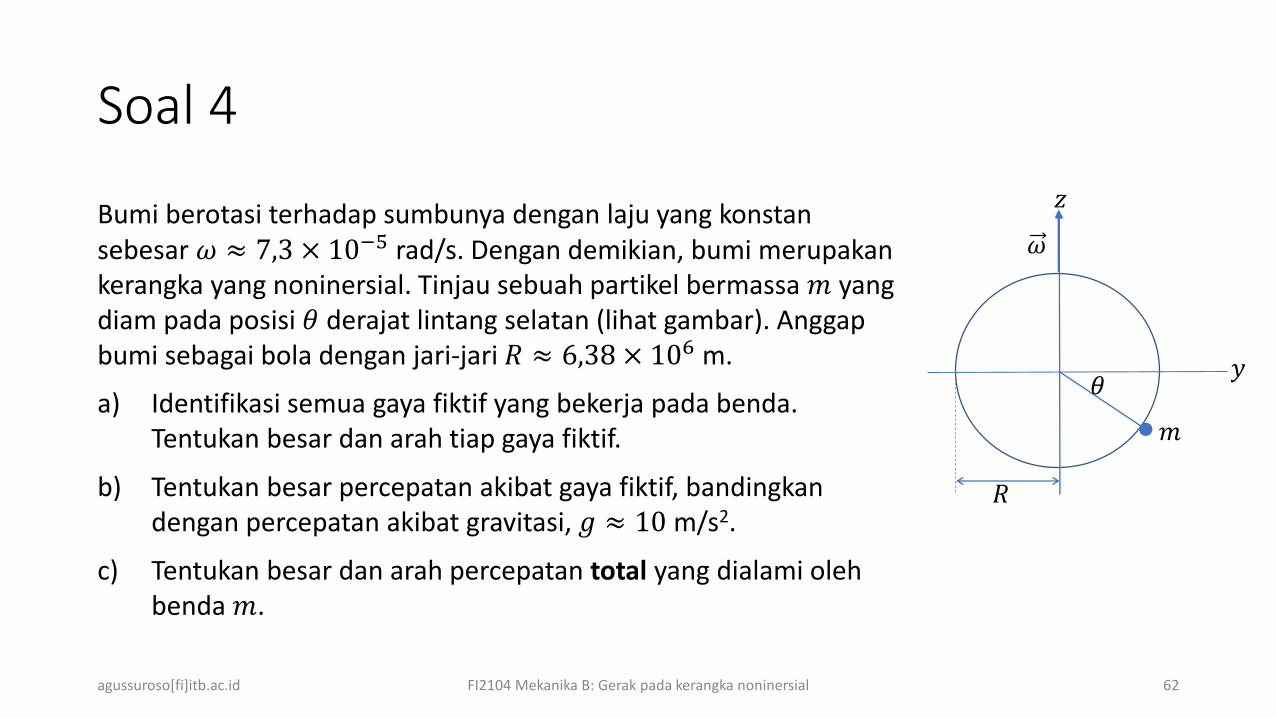
Soal 4
Bumi berotasi terhadap sumbunya dengan laju yang konstansebesar 𝜔 ≈ 7,3 × 10−5 rad/s. Dengan demikian, bumi merupakankerangka yang noninersial. Tinjau sebuah partikel bermassa 𝑚 yang diam pada posisi 𝜃 derajat lintang selatan (lihat gambar). Anggapbumi sebagai bola dengan jari-jari 𝑅 ≈ 6,38 × 106 m.
a) Identifikasi semua gaya fiktif yang bekerja pada benda. Tentukan besar dan arah tiap gaya fiktif.
b) Tentukan besar percepatan akibat gaya fiktif, bandingkandengan percepatan akibat gravitasi, 𝑔 ≈ 10 m/s2.
c) Tentukan besar dan arah percepatan total yang dialami oleh benda 𝑚.
agussuroso[fi]itb.ac.id FI2104 Mekanika B: Gerak pada kerangka noninersial 62
𝑚
𝑦
𝑧
𝜔
𝜃
𝑅

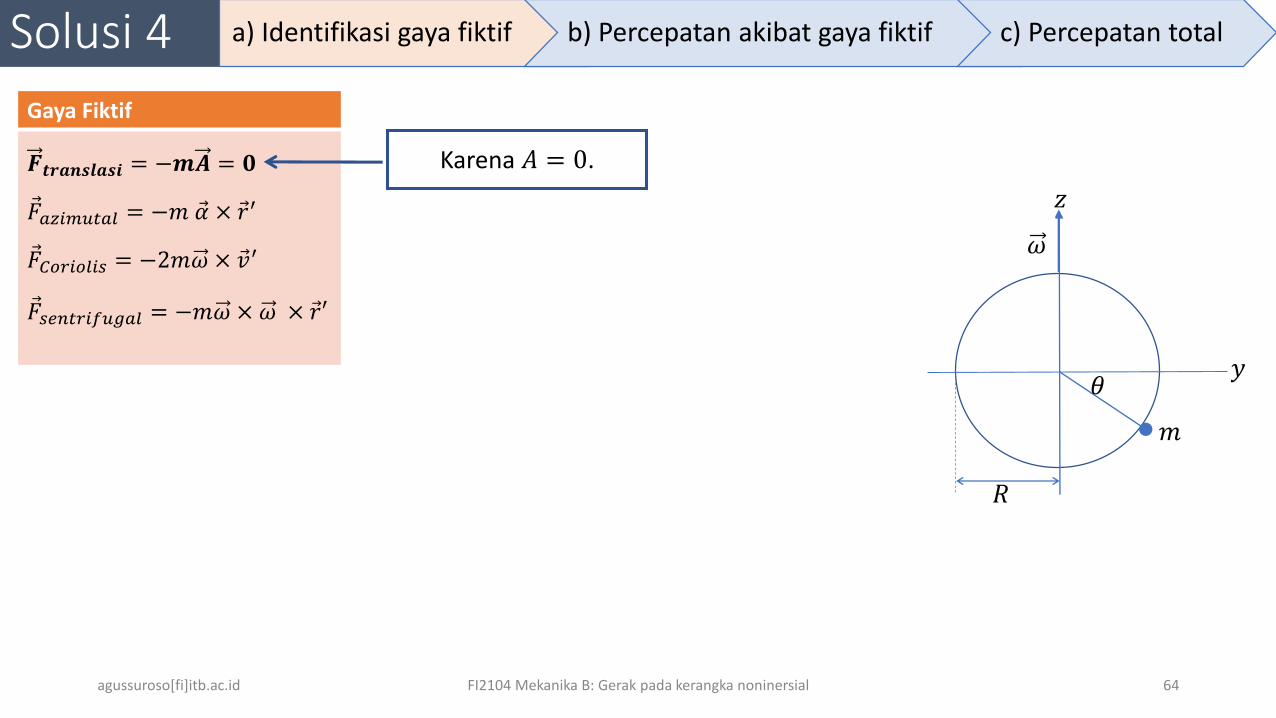
Solusi 4 a) Identifikasi gaya fiktif b) Percepatan akibat gaya fiktif c) Percepatan total
agussuroso[fi]itb.ac.id FI2104 Mekanika B: Gerak pada kerangka noninersial 63
Gaya Fiktif
Ԧ𝐹𝑡𝑟𝑎𝑛𝑠𝑙𝑎𝑠𝑖 = −𝑚 Ԧ𝐴
Ԧ𝐹𝑎𝑧𝑖𝑚𝑢𝑡𝑎𝑙 = −𝑚 Ԧ𝛼 × Ԧ𝑟′
Ԧ𝐹𝐶𝑜𝑟𝑖𝑜𝑙𝑖𝑠 = −2𝑚𝜔 × Ԧ𝑣′
Ԧ𝐹𝑠𝑒𝑛𝑡𝑟𝑖𝑓𝑢𝑔𝑎𝑙 = −𝑚𝜔 × 𝜔 × Ԧ𝑟′
𝑚
𝑦
𝑧
𝜔
𝜃
𝑅
Solusi 4 a) Identifikasi gaya fiktif b) Percepatan akibat gaya fiktif c) Percepatan total
agussuroso[fi]itb.ac.id FI2104 Mekanika B: Gerak pada kerangka noninersial 64
Gaya Fiktif
𝑭𝒕𝒓𝒂𝒏𝒔𝒍𝒂𝒔𝒊 = −𝒎𝑨 = 𝟎
Ԧ𝐹𝑎𝑧𝑖𝑚𝑢𝑡𝑎𝑙 = −𝑚 Ԧ𝛼 × Ԧ𝑟′
Ԧ𝐹𝐶𝑜𝑟𝑖𝑜𝑙𝑖𝑠 = −2𝑚𝜔 × Ԧ𝑣′
Ԧ𝐹𝑠𝑒𝑛𝑡𝑟𝑖𝑓𝑢𝑔𝑎𝑙 = −𝑚𝜔 × 𝜔 × Ԧ𝑟′
Karena 𝐴 = 0.
𝑚
𝑦
𝑧
𝜔
𝜃
𝑅
Solusi 4 a) Identifikasi gaya fiktif b) Percepatan akibat gaya fiktif c) Percepatan total
agussuroso[fi]itb.ac.id FI2104 Mekanika B: Gerak pada kerangka noninersial 65
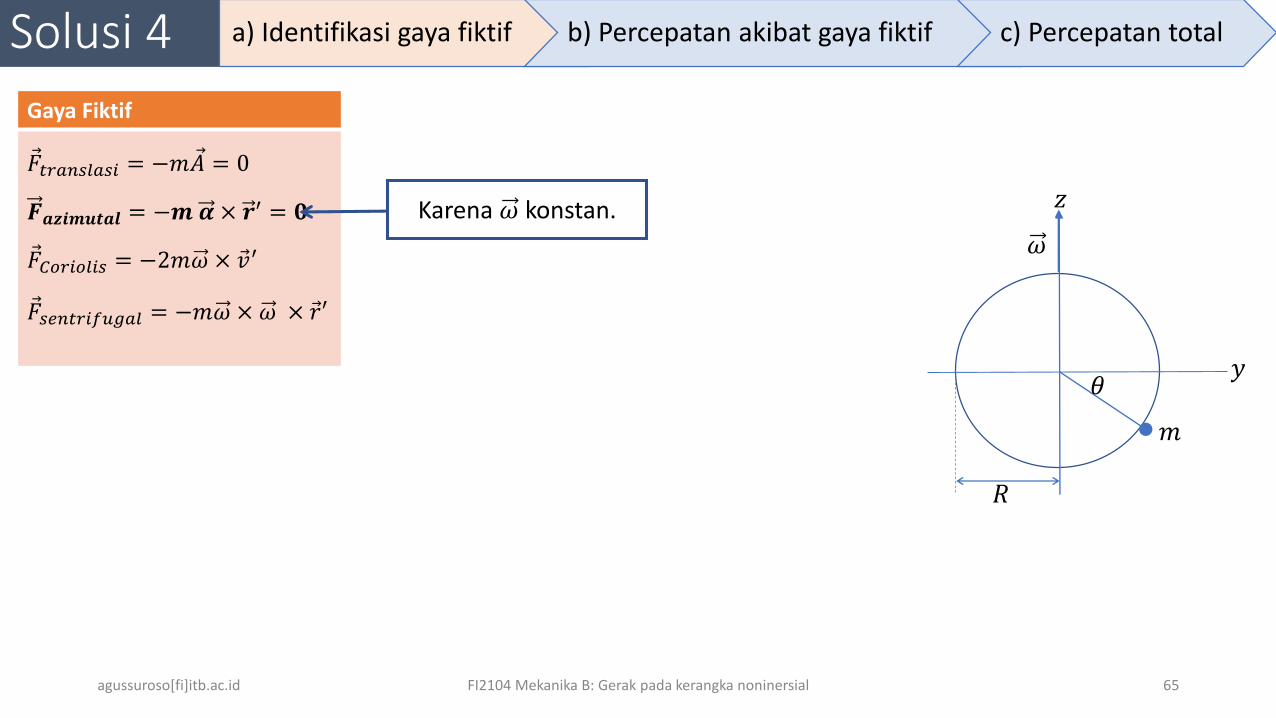
Gaya Fiktif
Ԧ𝐹𝑡𝑟𝑎𝑛𝑠𝑙𝑎𝑠𝑖 = −𝑚 Ԧ𝐴 = 0
𝑭𝒂𝒛𝒊𝒎𝒖𝒕𝒂𝒍 = −𝒎 𝜶 × 𝒓′ = 𝟎
Ԧ𝐹𝐶𝑜𝑟𝑖𝑜𝑙𝑖𝑠 = −2𝑚𝜔 × Ԧ𝑣′
Ԧ𝐹𝑠𝑒𝑛𝑡𝑟𝑖𝑓𝑢𝑔𝑎𝑙 = −𝑚𝜔 × 𝜔 × Ԧ𝑟′
Karena 𝜔 konstan.
𝑚
𝑦
𝑧
𝜔
𝜃
𝑅

Solusi 4 a) Identifikasi gaya fiktif b) Percepatan akibat gaya fiktif c) Percepatan total
agussuroso[fi]itb.ac.id FI2104 Mekanika B: Gerak pada kerangka noninersial 66
Gaya Fiktif
Ԧ𝐹𝑡𝑟𝑎𝑛𝑠𝑙𝑎𝑠𝑖 = −𝑚 Ԧ𝐴 = 0
Ԧ𝐹𝑎𝑧𝑖𝑚𝑢𝑡𝑎𝑙 = −𝑚 Ԧ𝛼 × Ԧ𝑟′ = 0
𝑭𝑪𝒐𝒓𝒊𝒐𝒍𝒊𝒔 = −𝟐𝒎𝝎× 𝒗′ = 𝟎
Ԧ𝐹𝑠𝑒𝑛𝑡𝑟𝑖𝑓𝑢𝑔𝑎𝑙 = −𝑚𝜔 × 𝜔 × Ԧ𝑟′
Karena Ԧ𝑣′ = 0 (benda diam).
𝑚
𝑦
𝑧
𝜔
𝜃
𝑅

Solusi 4 a) Identifikasi gaya fiktif b) Percepatan akibat gaya fiktif c) Percepatan total
agussuroso[fi]itb.ac.id FI2104 Mekanika B: Gerak pada kerangka noninersial 67
Gaya Fiktif
Ԧ𝐹𝑡𝑟𝑎𝑛𝑠𝑙𝑎𝑠𝑖 = −𝑚 Ԧ𝐴 = 0
Ԧ𝐹𝑎𝑧𝑖𝑚𝑢𝑡𝑎𝑙 = −𝑚 Ԧ𝛼 × Ԧ𝑟′ = 0
Ԧ𝐹𝐶𝑜𝑟𝑖𝑜𝑙𝑖𝑠 = −2𝑚𝜔 × Ԧ𝑣′ = 0
𝑭𝒔𝒆𝒏𝒕𝒓𝒊𝒇𝒖𝒈𝒂𝒍 = −𝒎𝝎×𝝎 × 𝒓′
Dari gambar diketahui:• 𝜔 = 𝜔 Ƹ𝑧• Ԧ𝑟′ = 𝑅 cos 𝜃 ො𝑦 − sin 𝜃 Ƹ𝑧
𝑚
𝑦
𝑧
𝜔
𝜃
𝑅
Maka,
𝜔 × Ԧ𝑟′ =ො𝑥 ො𝑦 Ƹ𝑧0 0 𝜔0 cos 𝜃 − sin 𝜃
= −𝜔 cos𝜃 ො𝑥,
kemudian
𝜔 × 𝜔 × Ԧ𝑟′ =ො𝑥 ො𝑦 Ƹ𝑧0 0 𝜔
−𝜔 cos𝜃 0 0
= −𝜔2 cos 𝜃 ො𝑥
Solusi 4 a) Identifikasi gaya fiktif b) Percepatan akibat gaya fiktif c) Percepatan total
agussuroso[fi]itb.ac.id FI2104 Mekanika B: Gerak pada kerangka noninersial 68
Gaya Fiktif
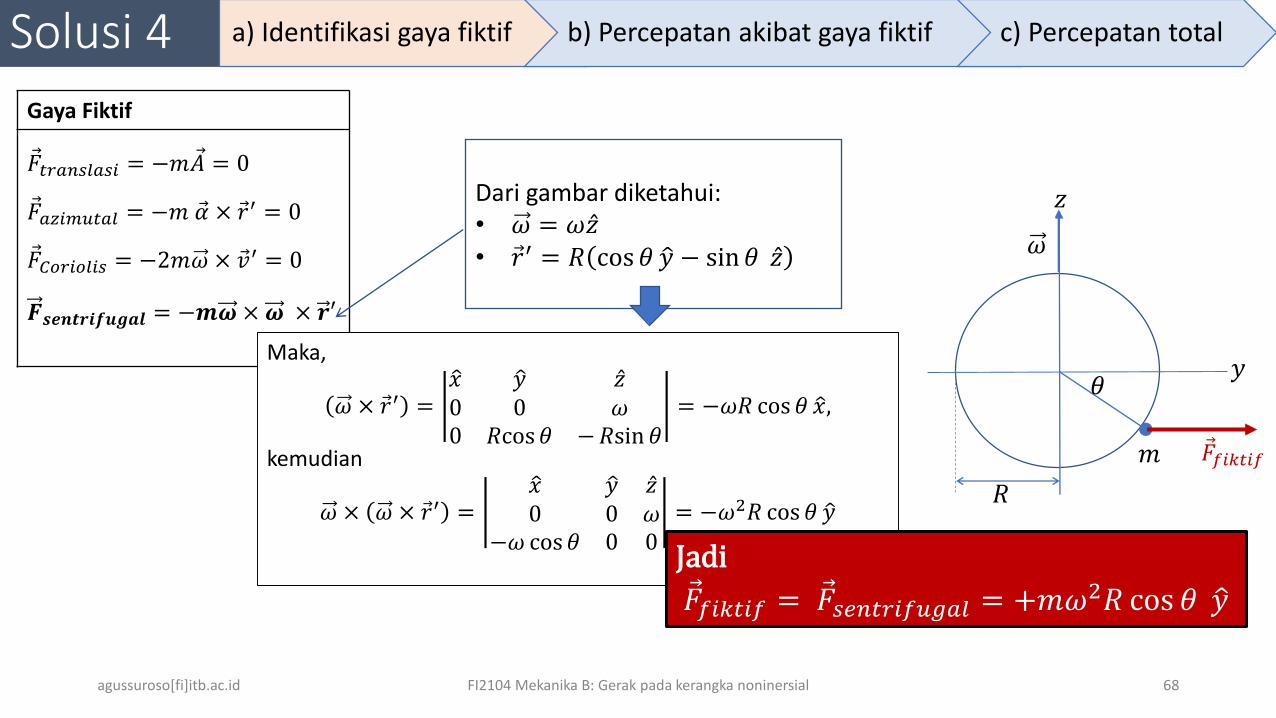
Ԧ𝐹𝑡𝑟𝑎𝑛𝑠𝑙𝑎𝑠𝑖 = −𝑚 Ԧ𝐴 = 0
Ԧ𝐹𝑎𝑧𝑖𝑚𝑢𝑡𝑎𝑙 = −𝑚 Ԧ𝛼 × Ԧ𝑟′ = 0
Ԧ𝐹𝐶𝑜𝑟𝑖𝑜𝑙𝑖𝑠 = −2𝑚𝜔 × Ԧ𝑣′ = 0
𝑭𝒔𝒆𝒏𝒕𝒓𝒊𝒇𝒖𝒈𝒂𝒍 = −𝒎𝝎×𝝎 × 𝒓′
Dari gambar diketahui:• 𝜔 = 𝜔 Ƹ𝑧• Ԧ𝑟′ = 𝑅 cos 𝜃 ො𝑦 − sin 𝜃 Ƹ𝑧
𝑚
𝑦
𝑧
𝜔
𝜃
𝑅
Maka,
𝜔 × Ԧ𝑟′ =ො𝑥 ො𝑦 Ƹ𝑧0 0 𝜔0 𝑅cos 𝜃 −𝑅sin 𝜃
= −𝜔𝑅 cos 𝜃 ො𝑥,
kemudian
𝜔 × 𝜔 × Ԧ𝑟′ =ො𝑥 ො𝑦 Ƹ𝑧0 0 𝜔
−𝜔 cos𝜃 0 0
= −𝜔2𝑅 cos 𝜃 ො𝑦
JadiԦ𝐹𝑓𝑖𝑘𝑡𝑖𝑓 = Ԧ𝐹𝑠𝑒𝑛𝑡𝑟𝑖𝑓𝑢𝑔𝑎𝑙 = +𝑚𝜔2𝑅 cos 𝜃 ො𝑦
Ԧ𝐹𝑓𝑖𝑘𝑡𝑖𝑓

Solusi 4 a) Identifikasi gaya fiktif b) Percepatan akibat gaya fiktif c) Percepatan total
agussuroso[fi]itb.ac.id FI2104 Mekanika B: Gerak pada kerangka noninersial 69
𝑚
𝑦
𝑧
𝜔
𝜃
𝑅
Percepatan akibat gaya fiktif:
Ԧ𝑎𝑓𝑖𝑘𝑡𝑖𝑓 =Ԧ𝐹𝑓𝑖𝑘𝑡𝑖𝑓
𝑚= 𝜔2𝑅 cos 𝜃 ො𝑦
JadiԦ𝐹𝑓𝑖𝑘𝑡𝑖𝑓 = Ԧ𝐹𝑠𝑒𝑛𝑡𝑟𝑖𝑓𝑢𝑔𝑎𝑙 = +𝑚𝜔2𝑅 cos 𝜃 ො𝑦
Ԧ𝑎𝑓𝑖𝑘𝑡𝑖𝑓

Solusi 4 a) Identifikasi gaya fiktif b) Percepatan akibat gaya fiktif c) Percepatan total
agussuroso[fi]itb.ac.id FI2104 Mekanika B: Gerak pada kerangka noninersial 70
𝑚
𝑦
𝑧
𝜔
𝜃
𝑅
Percepatan akibat gaya fiktif:
Ԧ𝑎𝑓𝑖𝑘𝑡𝑖𝑓 =Ԧ𝐹𝑓𝑖𝑘𝑡𝑖𝑓
𝑚= 𝜔2𝑅 cos 𝜃 ො𝑦
Ԧ𝑎𝑓𝑖𝑘𝑡𝑖𝑓
Diketahui: • 𝜔 ≈ 7,3 × 10−5 rad/s.• 𝑅 = 6,38 × 106 m.Sehingga𝑎𝑓𝑖𝑘𝑡𝑖𝑓 ≈ 3,4 × 10−2𝑚/𝑠2.
Solusi 4 a) Identifikasi gaya fiktif b) Percepatan akibat gaya fiktif c) Percepatan total
agussuroso[fi]itb.ac.id FI2104 Mekanika B: Gerak pada kerangka noninersial 71
𝑚
𝑦
𝑧
𝜔
𝜃
𝑅
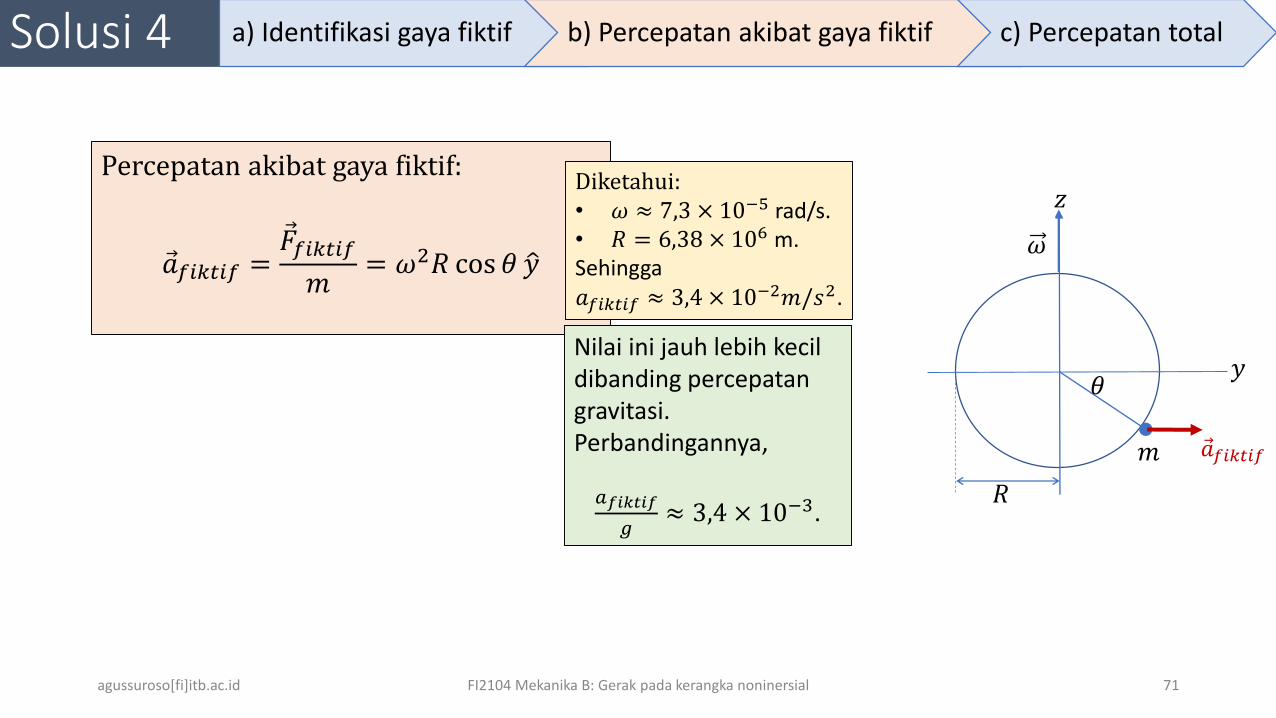
Percepatan akibat gaya fiktif:
Ԧ𝑎𝑓𝑖𝑘𝑡𝑖𝑓 =Ԧ𝐹𝑓𝑖𝑘𝑡𝑖𝑓
𝑚= 𝜔2𝑅 cos 𝜃 ො𝑦
Ԧ𝑎𝑓𝑖𝑘𝑡𝑖𝑓
Diketahui: • 𝜔 ≈ 7,3 × 10−5 rad/s.• 𝑅 = 6,38 × 106 m.Sehingga𝑎𝑓𝑖𝑘𝑡𝑖𝑓 ≈ 3,4 × 10−2𝑚/𝑠2.
Nilai ini jauh lebih kecildibanding percepatangravitasi. Perbandingannya,
𝑎𝑓𝑖𝑘𝑡𝑖𝑓
𝑔≈ 3,4 × 10−3.
Solusi 4 a) Identifikasi gaya fiktif b) Percepatan akibat gaya fiktif c) Percepatan total
agussuroso[fi]itb.ac.id FI2104 Mekanika B: Gerak pada kerangka noninersial 72
𝑚
𝑦
𝑧
𝜔
𝜃
𝑅
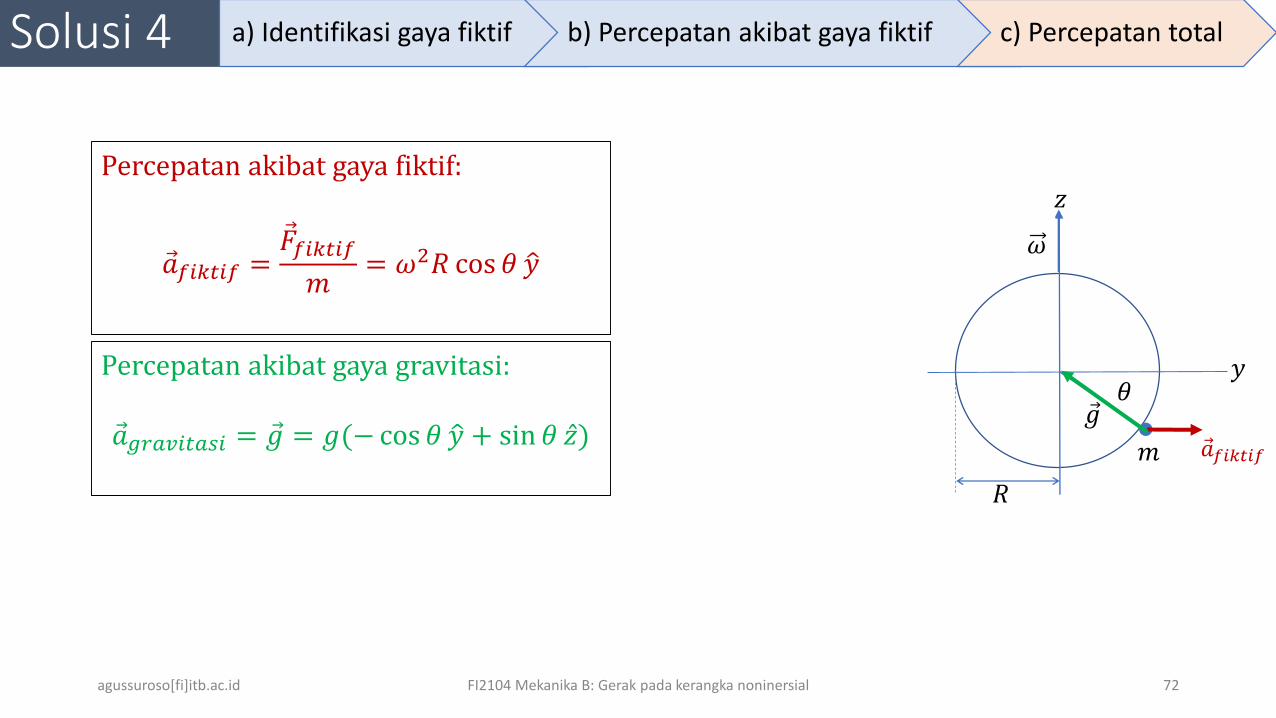
Percepatan akibat gaya fiktif:
Ԧ𝑎𝑓𝑖𝑘𝑡𝑖𝑓 =Ԧ𝐹𝑓𝑖𝑘𝑡𝑖𝑓
𝑚= 𝜔2𝑅 cos 𝜃 ො𝑦
Ԧ𝑎𝑓𝑖𝑘𝑡𝑖𝑓
Percepatan akibat gaya gravitasi:
Ԧ𝑎𝑔𝑟𝑎𝑣𝑖𝑡𝑎𝑠𝑖 = Ԧ𝑔 = 𝑔(− cos 𝜃 ො𝑦 + sin 𝜃 Ƹ𝑧)Ԧ𝑔

Solusi 4 a) Identifikasi gaya fiktif b) Percepatan akibat gaya fiktif c) Percepatan total
agussuroso[fi]itb.ac.id FI2104 Mekanika B: Gerak pada kerangka noninersial 73
Percepatan akibat gaya fiktif:
Ԧ𝑎𝑓𝑖𝑘𝑡𝑖𝑓 =Ԧ𝐹𝑓𝑖𝑘𝑡𝑖𝑓
𝑚= 𝜔2𝑅 cos 𝜃 ො𝑦
Percepatan akibat gaya gravitasi:
Ԧ𝑎𝑔𝑟𝑎𝑣𝑖𝑡𝑎𝑠𝑖 = Ԧ𝑔 = 𝑔(− cos 𝜃 ො𝑦 + sin 𝜃 Ƹ𝑧)
Percepatan total
Ԧ𝑎𝑡𝑜𝑡𝑎𝑙 = 𝜔2𝑅 − 𝑔 cos 𝜃 ො𝑦 + sin 𝜃 Ƹ𝑧
Ԧ𝑎𝑡𝑜𝑡𝑎𝑙 𝑦
𝑧
𝜔
𝑅
Ԧ𝑎𝑓𝑖𝑘𝑡𝑖𝑓
Ԧ𝑔

Soal 5Tinjau sebuah benda bermassa 𝑚 = 1 kg jatuh bebas dari suatu
ketinggian ℎ = 20 m dari permukaan bumi (nilai ℎ dapat dianggap jauh
lebih kecil dari 𝑅 sehingga percepatan gravitasi bumi bernilai konstan).
Saat 𝑡 = 0, benda diam pada sumbu-𝑦 (lihat gambar). Anggap bumi
berotasi dengan kecepatan sudut konstan sebesar sudut konstan 𝜔 = 𝜔 Ƹ𝑧.
a) Identifikasi gaya-gaya fiktif yang bekerja pada benda 𝑚 tersebut saat
𝑡 = 0. Tentukan besar dan arah tiap gaya tersebut, bandingkan
dengan besarnya gaya berat benda.
b) Tentukan gaya fiktif yang bekerja pada benda saat 𝑡 > 0.
agussuroso[fi]itb.ac.id FI2104 Mekanika B: Gerak pada kerangka noninersial 74
𝑚
𝑥
𝑦
𝑧
𝜔
𝑅 ℎ
c) Tinjau gerakan benda radial menuju permukaan bumi. Tentukan percepatan dan kecepatan radial
benda saat 𝑡 > 0. Anda dapat mengabaikan percepatan radial akibat gaya fiktif, jika nilainya sangat
kecil dibanding 𝑔.
d) Tentukan waktu yang diperlukan oleh benda untuk mencapai permukaan bumi.
e) Tentukan pergeseran posisi jatuhnya benda di permukaan bumi akibat gaya fiktif.