Dividing Head Digital
28
TUGAS MATA KULIAH TEKNIK RANCANG BANGUN PERANCANGAN DIGITAL DIVIDING HEAD BERBASIS MIKROKONTROLER Disusun oleh: Nama : RONI SETIAWAN NIM : 08518241014 Prodi : PT. Mekatronika PENDIDIKAN TEKNIK ELEKTRO FAKULTAS TEKNIK UNIVERSITAS NEGERI YOGYAKARTA 2010/2011
-
Upload
roni-nepology -
Category
Documents
-
view
298 -
download
12
Transcript of Dividing Head Digital

TUGAS
MATA KULIAH TEKNIK RANCANG BANGUN
PERANCANGAN DIGITAL DIVIDING HEAD
BERBASIS MIKROKONTROLER
Disusun oleh:
Nama : RONI SETIAWAN
NIM : 08518241014
Prodi : PT. Mekatronika
PENDIDIKAN TEKNIK ELEKTRO
FAKULTAS TEKNIK
UNIVERSITAS NEGERI YOGYAKARTA
2010/2011

1
BAB I
PENDAHULUAN
1.1 Latar Belakang
Kepala pembagi merupakan alat bantu yang penting dalam proses
pengefraisan. Alat ini digunakan untuk membagi lingkaran atau keliling
benda kerja menjadi bagian yang sama, seperti pada pembuatan roda gigi,
segi empat, segienam, segi delapan dan lainnya. Alat ini dapat juga digunakan
untuk memutar benda kerja dengan perbandingan relatif terhadap meja seperti
pada pembuatan helik dan pereameran.
Prinsip utama dari kepala pembagi adalah dengan di putar sebesar sudut
putar tertentu akan menghasilkan putaran cekam/benda kerja sejauh tertentu.
Dengan memanfaatkan piringan pembagi, kepala pembagi dapat membagi
keliling ligkaran menjadi bagian yang sama. Bagian utama dari alat pembagi
adalah roda gigi cacing dan ulir cacing dengan perbandingan putaran tertentu.
Piringan pada kepala pembagi memiliki banyak lubang dengan tingkatan
tertentu. Sehingga dapat dibuat patokan untuk membagi keliling lingkaran
menjadi bagian yang sama.
Kepala pembagi dengan tingkat kemampuan dan ketelitian pembagi
sangat tergantung dari piringan pembagi yang digunakanya. Semakin banyak
lubang pada piringan pembagi, berarti semakin panjang jangkauan
pembagianya juga semakin teliliti tingkat pembaginya. Dengan semakin
banyak lubang pembagi, operator harus semakin teliti dalam setiap pemutaran
pedal pembagi. Dengan semakin telilitinya, operator akan cepat lelah
sehingga faktor human eror akan bertambah.
Untuk itu, dibuatlah inovasi baru Digital Dividing Head, yaitu kepala
pembagi yang menggunakan prinsip digital. Prinsip kerja dari kepala pembagi
ini tidak jauh berbeda dengan kepala pembagi konvensional (menggunakan
piringan pembagi), yaitu dengan putaran tertentu dapat menghasilkan putaran
tertentu pada benda kerja. Perbedaan yang dominan antara kepala pembagi
digital dengan kepala pembagi konvensional adalah cara pembagianya. Pada

2
kepala pembagi konvensional pembagianya menggunakan perhitungan
manual, kemudian operator memutar spindle pemutar sebesar sudut tertentu
terhadap piringan pembagi. Sedangkan kepala pembagi digital, pembaginya
menggunakan mikrokontroler. Semisal operator menginginkan membagi
lingkaran menjadi 20. Operator tidak perlu menghitung berapa lubang harus
dia putar, tetapi operator cukup mengetik berapa pembagi yang diinginkan
pada keypad yang tersedia kemudian tekan OK. Selanjutnya operator siap
untuk mengfrais. Untuk pemutaran selanjutnya operator tinggal menekan
berlawanan dengan jarum jam. Penekanan tombol dilakukan sampai benda
kerja menjadi yang diinginkan. Dengan hanya menekan tombol berarti
operator melakukan kerja yang efisien, dan factor human error pun lebih
kecil.
Selain itu untuk pembagian diferensial, dividing head digital lebih
efektif dari pada yang konvensional. Karena pada kepala pembagi digital
tidak perlu mengganti roda gigi bantu (seperti pada kepala pembgi
diferensial), tetapi cukup mengetik berapa nilai pergeseran (sudut aksial) dan
berapa panjang benda pada keypad yang tersedia di eretan. Selanjutnya tekan
OK. Eretan akan bergerak maju/mundur sesuai yang diinginkan sepanjang
benda kerja yang telah ditentukan.
1.2 Batasan Masalah
Tujuan dari pembuatan alat ini adalah untuk memperkecil factor human
eror dalam pembuatan roda gigi dengan tidak mengurangi tingkat kepresisian
dalam pembuatan roda gigi. Adapaun batasan masalahnya adalah:
1. Bagaiamana desain dividing head digital?
2. Bagaiamana cara kerja dari dividing head digital?
3. Apa saja kelebihan dan kelemahan dividing head digital?

3
BAB II
PERANCANGAN DAN PERHITUNGAN
2.1 Desain Konstruksi
Konstruksi dari digital dividing head ini pada dasarnya sama dengan
konstruksi dari dividing head konvensional. Perbedaanya terletak pada ada
dan tidaknya piringan pembagi, serta penambahan eretan pada dividing head
digital. Pada dividing head konvensianal terdapat piringan pembagi yang
berfungsi untuk membagi benda kerja. Sedangkan pada dividing head digital
tidak terdapat piringan pembagi, karena system pembagianya menggunakan
putaran motor servo yang dikendalikan oleh mikrokontroler. Selain itu pada
dividing head digital memiliki eretan yang tidak dimiliki oleh dividing head
konvensioanal. Eretan ini berfungsi untuk pembagian diferensial. Sedangkan
pada dividing head konvensianal pembagian diferensial menggunakan
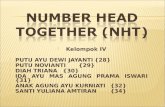
susunan roda gigi dengan perbandingan rasio tertentu. Berikut adalah
konstruksi dari dividing head digital:
1
2
3
4
5
6
7 8

4
9
10
11
12
13
8
7
2
14
6
15
16
17

5
Keterangan:
1. Cekam 10. Roda gigi lurus
2. Box gigi pembagi 11. Roda gigi pembagi utama (roda cacing)
3. Box utama 12. Motor servo
4. Box eretan 13. Roda gigi pembagi utama (ulir cacing)
5. Keypad 14. Roda gigi pembagi sudut (roda cacing2)
6. Pemutar 15. Roda gigi pembagi sudut (ulir cacing2)
7. Landasan eretan 16. Roda gigi pembagi sudut (ulir cacing1)
8. Poros ulir eretan 17. Roda gigi pembagi sudut (roda cacing1)
9. Poros utama
2.2 Langkah Pembuatan
Langkah-langkah pembuatan Digital Dividing Head secara garis besar
adalah:
1. Penyediaan bahan dan komponen yang diperlukan
Untuk membuat digital dividing head ini diperlukan bermacam macam
bahan dan komponen yang berfariasi. Untuk mewujudkan alat ini
sebaiknya semua barang sudah tersedia sesuai rencana.
2. Pembuatan Poros Utama
Poros utama dibuat dengan memperhitungkan berapa besar beban yang
akan dipikulnya.
3. Pembuatan roda gigi pembagi utama
Roda gigi pembagi utama menggunakan pasangan roda gigi cacing. Pada
alat ini perbandigan putaran antara roda gigi cacing dan ulir cacing
adalah 50:1. Untuk mendapatkan perandingan putaran tersebut dilakukan
perhitungan untuk membuat pasangan roda gigi cacing dengan ulir
cacing. Pada poros ulir cacing, nantinya akan dibuat roda gigi lurus yang
berfungsi sebagai transmisi putaran dari motor servo ke ulir cacing.
4. Pembuatan box roda gigi pembagi
Box ini berfungsi sebagai tempat poros dimana roda gigi pembagi
berputar.

6
5. Pembuatan roda gigi pembagi sudut
Bagian ini berfungsi agar kepala pembagi dapat membentuk sudut 0o
90o. Bagian ini terdiri dari 2 buah roda gigi cacing dan ulir cacing.
Perbandingan dari roda gigi ini adalah 900:1. Hal ini diharapkan supaya
kepala pembagi lebih teliti dalam membentuk sudut vertical. Dengan
perbandingan rasio tersebut maka untuk mendapatkan 1o pergeseran
poros utama menuju sumbu vertical dibutuhkan 2,5 putaran.
6. Pembuatan box kepala pembagi
Box ini berfungsi sebagai housing dari pada roda gigi yang ada. Box ini
terdiri dari box roda gigi pembagi utama, box roda gigi pemutar sudut
kepala pembagi, box motor servo, serta rangkaian mikrokontroler yang
berfungsi sebagai control pembagi.
7. Pembuatan roda gigi motor servo
Alat ini menggunakan 2 buah servo, yaitu satu buah servo sebagai
pembagi utama, dan servo lainya digunakan pada eretan yang nantinya
dapat digunakan pada pembagian diferensial. Roda gigi ini berfungsi
untuk mentaransmisikan putaran dari motor servo ke roda gigi pembagi
utama. Perbandingan ratio pada servo pembagi dengan ulir cacing
pembagi adalah 2:1, sedangkan ratio antara servo eretan dengan ulir
cacing eretan adalah 2:1.
8. Pembuatan roda gigi dan ulir eretan
Roda gigi dan ulir pada eretan ini berfungsi untuk pembagian diferensial.
Susunan roda gigi ini terdiri dari pasangan roda gigi cacing serta
pasangan ulir M20 x 1,75. Gambar dan susunan roda gigi dan ulir dapat
dilihat dalam gambar. Pasangan roda gigi cacing memiliki perbandingan
50:1. Sehingga dengan susunan seperti gambar untuk menggeser eretan
per 1 mm diperlukan 28,57 putaran pada ulir cacing atau 57,14 putaran
pada servo eretan.
9. Pembuatan landasan dan eretan bawah
Kepala pembagi ini dilengkapi dengan landasan dan eretan. Landasan
berfungsi sebagai tempat berpegangnya kepala pembagi dengan meja

7
mesin frais, sedangkan eretan berguna jika kepala pembagi digunakan
untuk pembagian diferensial.
10. Pembuatan rangkaian elektronik dan pemrograman mikrokontroler
Pada alat ini system pembagianya menggunakan keypad sebagai input,
kemudian diproses dalam mikrokontroler dan selanjutnya mikrokontroler
memberikan sinyal terhadap motor servo untuk berputar sebesar sudut
tertentu, dan selanjutnya motor servo memutar roda gigi. Mulai dari
pengaturan kecepatan arah dan jumlah putaran motor servo dikendalikan
oleh mikrokontroler.

8
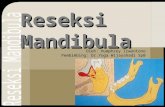
Bagan alur pembuatan Dividing Head dapat dilihat pada gambar
berikut:
Membuat gambar desain
Pengadaan bahan dan
komponen yang diperlukan
Perhitungan gaya
Pembuatan
roda gigi pembagi
Pembuatan
box gigi pembagi
Pembuatan roda gigi
pembagi sudut vertikal
Pembuatan
box utama
Go
Not
Go
Pembuatan
roda gigi eretan
Pembuatan
eretan dan landasan
Pembuatan
Rangkaian elektronik
Pemrograman
mikrokontroler
Uji perfomance
Selesai
Not Go
Go
Bagan alur pembuatan Digital Dividing Head
Revisi gambar
Membuat Rancangan

9
2.3 Perencanaan dan Perhitungan
2.3.1 Roda Gigi Pembagi Utama
Roda gigi pembagi utama terdiri dari pasangan roda gigi cacing
dan ulir cacing. Roda gigi cacing ini berfungsi untuk meneruskan daya
putar yang dihasilkan motor servo ke poros utama. Roda gigi cacing ini
memiliki ratio 50:1, yang artinya, roda gigi cacing akan berputar 1
putaran jika ulir cacing berputar sebanyak 50 putaran.
Roda gigi cacing dan ulir cacing terbuat dari baja karbon rendah
dengan presentase karbon 0,20% - 0,30%. Baja karbon rendah memiliki
sifat mudah dibentuk dan mudah ditempa, sehingga cocok digunakan
sebagai bahan dasar roda gigi cacing. Berikut adalah perhitungan
pembebanan dan ukuran pada roda gigi pembagi:
Roda gigi ini diperkirakan memikul cekam dan benda kerja
dengan rencana sebagai berikut :
No Nama elemen dan
bagianya
Ketentuan dan
Persamaan Nilai Satuan
1 Beban Putar (W) Cekam dan benda
kerja 20 Kg
2 Kecepatan putar (V) 0.1 m/min
3 0.85
4 perbandingan reduksi i = Z2/Z1 50
5 Daya yang diperlukan (P) P =W.V/102. 0.023 KW
6 Daya Motor Listrik PM 0.027 Hp
7 jumlah gigi ulir cacing
(Z1) 1
8 jumlah gigi roda cacing
(Z2) 50
9 sudut kisar (y) 2 derajat
10 cacing bersatu dengan
porosnya ? ya
11 modul aksial (ms) ms = mn/cos y 1.501
12 modul normal (mn) 1.5
13 diameter lingkar jarak d1 = Z1mn/sin y 42.981 mm

10
bagi ulir cacing (d1)
14 diameter lingkar jarak
bagi roda cacing (d2) d2 = ms.Z2 75.046 mm
15 jarak sumbu poros (a) a = (d1+d2)/2 59.013 mm
16 tinggi kepala gigi cacing
(hk) Hk = mn 1.5 mm
17 tinggi kaki gigi cacing (hf) Hf = 1,157mn 1.736 mm
18 tinggi gigi (H) H = 2,157mn 3.236 mm
19 kelonggaran puncak (c ) c = 0,157mn 0.236
20 diamter luar gigi cacing
(dk1) dk1= d1+2hk 45.98 mm
21 diamter dalam gigi cacing
(df1) df1= d1-2hf 39.51 mm
22 diameter kepala ulir
cacing (dk2) dk2 = d2+2hk 78.046 mm
23 diameter dalam ulir
cacing (df2) df2 = d2-2hf 71.575 mm
24 lebar sisi roda gigi cacing
(B) B = 0,577 dk1 26.531 mm
25 sudut lengkungan sisi gigi
(ø) 90 derajat
26 lebar sisi gigi efektip (Be) Be = dk1 Sin(ø/2) 32.513 mm
27 bahan cacing dan roda
cacing Baja Karbon rendah (0,20% - 0,30% C)
28 tegangan lentur yang
ba) 21 kg/mm
2
29 faktor bentuk roda cacing
(Y) 0.048
30 beban lentur yang
diijinkan (Fab) Fab = ba.Be.mn.Y 49.160 Kg
31 faktor tahan aus Kc 0.035 kg/mm2
32 faktor sudut kisar Ky 1
33 beban permukaan gigi Fac = Kc.d2.be.Ky 85.4 Kg

11
yang diijinkan (Fac)
34 beban tangensial gigi (Ft) Ft = 102 P 20 kg
35 F min Fac > Ft ya
2.3.2 Roda Gigi Pemutar Sudut
Roda gigi pemutar sudut terdiri dari 2 pasang roda gigi cacing dan
ulir cacing. Sumber putaran pada roda gigi ini berasal dari handel
pemutar yang diputar secara manual oleh manusia. Ratio perbandingan
roda gigi ini adalah 900:1, yaitu terdiri dari 2 pasang roda gigi cacing
yang saling berhubugan dengan ratio 50:1 dan 18:1. Dengan ratio
900:1, untuk mendaatkan perpindahan sedut vertical kepala pembagi
sebesar 10 diperlukan 2,5 putaran pada handel pemutar.
Roda gigi cacing dan ulir cacing pemuttar sudut terbuat dari baja
karbon rendah dengan presentase karbon 0,20% - 0,30%. Baja karbon
rendah memiliki sifat mudah dibentuk dan mudah ditempa, sehingga
cocok digunakan sebagai bahan dasar roda gigi cacing. Berikut adalah
perhitungan pembebanan dan ukuran pada roda gigi pengatur sudut:
No Nama elemen dan
bagianya
Ketentuan dan
Persamaan
Pasangan
Gigi 1
Pasangan
Gigi 2 Satuan
1 Beban Putar (W) Box pembagi,
cekam dan benda
kerja
10 10 Kg
2 Kecepatan putar (V) 0.1 0.1 m/min
3 1 1
4 perbandingan reduksi i = Z2/Z1 50 18
5 jumlah gigi ulir cacing (Z1) 1 1
6 jumlah gigi roda cacing (Z2) 50 18
7 sudut kisar (y) 4 4 derajat
8 cacing bersatu dengan
porosnya ? ya ya
9 modul aksial (ms) ms = mn/cos y 1.002 1.002
10 modul normal (mn) 1 1
11 diameter lingkar jarak bagi d1 = Z1mn/sin y 14.336 14.336 mm

12
ulir cacing (d1)
12 diameter lingkar jarak bagi
roda cacing (d2) d2 = ms.Z2 50.122 18.044 mm
13 jarak sumbu poros (a) a = (d1+d2)/2 32.229 16.190 mm
14 tinggi kepala gigi cacing (hk) Hk = mn 1 1 mm
15 tinggi kaki gigi cacing (hf) Hf = 1,157mn 1.157 1.157 mm
16 tinggi gigi (H) H = 2,157mn 2.157 2.157 mm
17 kelonggaran puncak (c ) c = 0,157mn 0.157 0.157 mm
18 diamter luar gigi cacing (dk1) dk1= d1+2hk 16.336 16.336 mm
19 diamter dalam gigi cacing
(df1) df1= d1-2hf 12.022 12.022 mm
20 diameter kepala ulir cacing
(dk2) dk2 = d2+2hk 52.122 20.044 mm
21 diameter dalam ulir cacing
(df2) df2 = d2-2hf 47.808 15.730 mm
22 lebar sisi roda gigi cacing (B) B = 0,577 dk1 9.426 9.426 mm
23 sudut lengkungan sisi gigi (ø) 90 90 derajat
24 lebar sisi gigi efektip (Be) Be = dk1Sin(ø/2) 11.551 11.551 mm
25 bahan cacing dan roda cacing Baja Karbon rendah (0,20% - 0,30% C)
26 tegangan lentur yang
ba) 21 21 kg/mm
2
27 faktor bentuk roda cacing (Y) 0.048 0.048
28 beban lentur yang diijinkan
(Fab) Fab = ba.Be.mn.Y 11.643 11.643 Kg
29 faktor tahan aus Kc 0.035 0.035 kg/mm2
30 faktor sudut kisar Ky 1 1
31 beban permukaan gigi yang
diijinkan (Fac)
Fac =
Kc.d2.be.Ky 30.264 17.295 Kg
32 beban tangensial gigi (Ft) Ft = 102 P 10 10 kg
33 F min Fac > Ft ya

13
2.3.3 Eretan
Eretan terdiri dari landasan, pasangan roda gigi cacing dan ulir
cacing dan pasangan poros ulir luar dan dalam. Landasan pada eretan
berfungsi sebagai dudukan dan tempat bergesernya kepala pembagi.
Landasan ini memiliki bentuk seperti ekor burung dengan permukaan
yang sangat halus. Landasan dibentuk seperti ekor burung, bertujuan
sebagai penstabil dan mengurangi getaran kepala pembagi saat
beroperasi. Sedangkan permukaan yang sangat halus bertujuan untuk
mengurangi gaya gesek, sehingga perpindahan kepala pembagi menjadi
lebih lancer. Pasangan roda gigi cacing berfungsi untuk mereduksi dan
meneruskan putaran dari motor servo ke poros ulir eretan. Pasangan
roda gigi ini memiliki ratio 50:1, hal ini berarti untuk memutar 1
putaran roda cacing diperlukan 50 putran ulir cacing. Pasangan poros
ulir luar dan ulir dalam pada eretan berfungsi untuk mengubah gerak
putar dari roda gigi cacing menjadi gerak maju mundur eretan. Poros
ulir ini adalah ulir metris dengan ukuran M20 x 1,75. Hal ini berarti jika
poros ulir berputar 1 putaran, eretan akan menggeser kepala pembagi
sejauh 1,75mm pada landsan. Jadi untuk menggeser kepala pembagi per
1mm diatas landasan, ulir cacing harus diputar sebanyak 28,57 putaran.
Landasan dibuat dari baja karbon tinggi dengan kadar karbon
0,60% - 1,50%. Baja karbon tinggi memiliki sifat sulit dibengkokan dan
dipotong, sehingga landasan akan semakin awet dan tahan lama. Untuk
roda gigi cacing dan ulir cacing terbuat dari baja karbon rendah dengan
presentase karbon 0,20% - 0,30%. Baja karbon rendah memiliki sifat
mudah dibentuk dan mudah ditempa, sehingga cocok digunakan
sebagai bahan dasar roda gigi cacing. Sedangkan poros ulir terbuat dari
baja karbon menengah dengan presentase karbon 0,30% - 0,40%. Baja
karbon menengah lebih sulit dibengkokan, dilas maupun dipotong,
sehingga poros ulir lebih tahan lama. Berikut adalah gambar desain
eretan:

14
Berikut adalah perhitungan pembebanan dan ukuran pada
pasangan roda gigi cacing pada eretan:
No Nama elemen dan
bagianya
Ketentuan dan
Persamaan Nilai Satuan
1 Beban Putar (W)
Poros ulir dan gaya
gesek dan pemotongan
benda kerja ketika
digunakan pembagian
diferensial
20 Kg
2 Kecepatan putar (V) 0.1 m/min
3 0.850
4 perbandingan reduksi i = Z2/Z1 50
5 Daya yang diperlukan
(P) P =W.V/102. 0.023 KW
6 Daya Motor Listrik PM 0.027 Hp
7 jumlah gigi ulir cacing
(Z1) 1
8 jumlah gigi roda cacing
(Z2) 50
9 sudut kisar (y) 4 derajat
10 cacing bersatu dengan
porosnya ? ya
11 modul aksial (ms) ms = mn/cos y 1.002
12 modul normal (mn) 1
13 diameter lingkar jarak d1 = Z1mn/sin y 14.336 mm

15
bagi ulir cacing (d1)
14 diameter lingkar jarak
bagi roda cacing (d2) d2 = ms.Z2 50.122 mm
15 jarak sumbu poros (a) a = (d1+d2)/2 32.229 mm
16 tinggi kepala gigi cacing
(hk) Hk = mn 1 mm
17 tinggi kaki gigi cacing
(hf) Hf = 1,157mn 1.157 mm
18 tinggi gigi (H) H = 2,157mn 2.157 mm
19 kelonggaran puncak (c ) c = 0,157mn 0.157 mm
20 diamter luar gigi cacing
(dk1) dk1= d1+2hk 16.336 mm
21 diamter dalam gigi
cacing (df1) df1= d1-2hf 12.022 mm
22 diameter kepala ulir
cacing (dk2) dk2 = d2+2hk 52.122 mm
23 diameter dalam ulir
cacing (df2) df2 = d2-2hf 47.808 mm
24 lebar sisi roda gigi
cacing (B) B = 0,577 dk1 9.426 mm
25 sudut lengkungan sisi
gigi (ø) 90 derajat
26 lebar sisi gigi efektip
(Be) Be = dk1 Sin(ø/2) 11.551 mm
27 bahan cacing dan roda
cacing Baja Karbon rendah (0,20% - 0,30% C)
28 tegangan lentur yang
ba) 21 kg/mm
2
29 faktor bentuk roda
cacing (Y) 0.048
30 beban lentur yang
diijinkan (Fab) Fab = ba.Be.mn.Y 11.643 Kg
31 faktor tahan aus Kc 0.035 kg/mm2

16
32 faktor sudut kisar Ky 1
33 beban permukaan gigi
yang diijinkan (Fac) Fac = Kc.d2.be.Ky 30.264 Kg
34 beban tangensial gigi
(Ft) Ft = 102 P 20 kg
35 F min Fac > Ft ya
2.3.4 Poros Utama
Poros utama berfungsi untuk meneruskan putaran dari roda gigi
pembagi utama ke cekam dan benda kerja. Poros utama terbuat dari
baja karbon menengah dengan kadar karbon 0,40% - 0,50%. Baja
karbon menengah memiliki sifat kekuatan lebih tinggi dibandingkan
dengan baja karbon rendah. Baja karbon menengah juga lebih sulit
dibengkokan, dilas maupun dipotong.
Desain dari bentuk poros utama seperti pada gambar dibawah.
Gaya yang bekerja pada poros utama diantaranya gaya geser, gaya
puntir, dan gaya momen. Pada saat mesin tidak beroperasi, poros utama
hanya memikul berat dari cekam saja. Tetapi ketika mesin beroperasi,
gaya puntir, gaya geser dan momen bekerja pada poros utama. Berikut
adalah perhitungan gaya yang bekerja pada poros utama:
No Nama elemen dan
bagianya Ketentuan dan Persamaan Nilai Satuan
1 Gaya (F1) 20 Kg
F2
F1
l M

17
2 Gaya (F2) 50 Kg
3 diameter poros (d)
(minimum)
1/3 31.34 mm
4 Panjang (l)
(maksimum) 175 mm
5 momen puntir (M) M=F1.r 313.34 kgmm
6 29 kg/mm2
7 Momen Lentur (Ml) Ml=F2.l 8750 kgmm
8 Tegangan geser maks
(Tmaks) Tmaks=(5,1/d
3)(Ml
2 2)1/2 1.45 kg/mm
2
2.3.5 Roda gigi Lurus
Roda gigi lurus disini berfungsi untuk meneruskan daya dari
motor servo. Roda gigi lurus pada digital dividing head ada sebanyak 2
pasang, yaitu pada masing-masing motor servo. Pasangan roda gigi
lurus ini memiliki ratio 2:1. Hal ini bertujuan untuk memperbesar torsi
yang dihasilkan motor servo. Roda gigi ini dibuat dari baja karbon
rendah dengan kadar karbon 0,20% - 0,30%. Berikut adalah
perhitungan gaya dan ukuran roda gigi lurus :
No Nama elemen
dan bagianya
Ketentuan dan
Persamaan
Motor
pembagi
Motor
eretan Satuan
1 daya yang akan
ditransmisikan (P) Daya motor servo 0.373 0.373 KW
2 Putaran Poros (n1) 120 120 rpm
3 Perbandingan
reduksi (i) i = Z2/Z1 2 2
4 modul (m) 2 1.5

18
5 = acos(df1/Z1m) 22 26 derajat
6 jumlah gigi
penggerak (Z1) 28 20
7 jumlah gigi yang
digerkan(Z2) 56 40
8 diameter lingkar
jarak bagi
penggerak (d1)
d1 = mZ1 56 30 mm
9 diameter lingkar
jarak bagi
penggerak (d2)
d2 = mZ2 112 60 mm
10 jarak sumbu poros
(a) a = (d1+d2)/2 84 45 mm
11 kelonggaran puncak
(Ck) 0.5 1.5 mm
12 diameter kepala
penggerak (dk1) dk1 = d1+2m 60 33 mm
13 diameter kepala
yang digerakan
(dk2)
dk2 = d2+2m 116 63 mm
14 diameter kaki
penggerak (df1) df1 = d1-2m 52 27 mm
15 diameter kaki yang
digerakan (df2) df1 = d2-2m 108 180 mm
16 tinggi gigi (H) H = 2m+Ck 4.5 4.5 mm
17 faktor bentuk gigi
penggerak (Y1) 0.32 0.32
18 faktor bentuk gigi
yang digerakan
(Y2)
0.396 0.396
19 kecepatan kelilin
(v) v = 1n1/(60.1000) 0.35 0.1884 m/s
20 gaya tangensial (Ft) Ft = 102P/v 108.18 201.94 Kg
21 faktor dinamis fV FV =3/(3+v) 0.895 0.94
22 b) 45 45 kg/mm
2
23 kekerasan
permukaan gigi
(Hb)
180 180 kg/mm2
24 a) 30 30 kg/mm
2
25 faktor tegangan 0.053 0.053

19
kontak (Kh)
26 beban permukaan
(FH) FH=FV Kh d1 2Z2/(Z1+Z2) 3.54 2 kg/mm
2.3.6 Box Gigi Pembagi
Box gigi pembagi merupakan tempat roda gigi pembagi berputar.
Box ini terbuat dari baja cor dengan ketebalan rata-rata 10mm. baja cor
yang digunakan memiliki kekerasan (HB) 175, kekuatan lentur 15,4
kg/mm2 dan kekuatan pembebanan 0,60 kg/mm
2. Desain box gigi
pembagi seperti gambar berikut:
Pada box gigi pembagi memiliki poros sebagai sebagai sumbu
gerakan ketika dilakukan pengaturan sumbu poros dividing head. Poros
ini terbuat dari baja karbon menengah dengan kadar karbon 0,40% -
0,50%. Baja karbon menengah memiliki sifat kekuatan lebih tinggi
dibandingkan dengan baja karbon rendah. Perhitungan gaya yang
bekerja pada poros box gigi pembagi adalah:
M
F
F
l1 l2

20
No Nama elemen dan
bagianya Ketentuan dan Persamaan Nilai Satuan
1 Gaya (F) 5 Kg
2 diameter poros (d)
(minimum)
1/3 8 mm
3 Panjang (l1) 30 mm
3 Panjang (l2) 0 mm
4 momen puntir (M) M=2F.r 40.4 kgmm
5 29 kg/mm2
6 Momen Lentur (Ml) Ml=F(l1+l2) 150 kgmm
7 Tegangan geser
maks (Tmaks) Tmaks=(5,1/d
3)(Ml
2 2)1/2 1.48 kg/mm
2
2.3.7 Box kepala pembagi
Box kepala pembagi merupakan housing dari semua komponen
yang digunakan. Yaitu terdiri dari box utama yang menyatu dengan box
gigi pemutar sudut. Bahan yang digunakan dalam pembuatan box
kepala pembagi ini sama dengan bahn yang digunakan pada box gigi
pembagi, yaitu baja cor dengan ketebalan rata-rata 10mm. baja cor yang
digunakan memiliki kekerasan (HB) 175, kekuatan lentur 15,4 kg/mm2
dan kekuatan pembebanan 0,60 kg/mm2. Desain kepala pembagi seperti
gambar berikut:

21
2.3.8 Handel Pemutar
Handel pemutar berfungsi sebagai pemutar untuk mengatur
sumbu poros kepala pembagi. Pada handel ini terdapat skala yang dapat
digunakan untuk ukuran pengaturan sudut sumbu kepala pembagi.
Handel ini terbuat dari baja ringan dengan konstruksi seperti gambar
dibawah:
2.3.9 Keypad dan Rangkaian Kendali
Rangkaian kendali pada alat ini menggunakan mikrokontroler
ATMEGA16. Inputan mikrokontroler berasal dari sinyal keypad yang
ditekan oleh operator. Dengan mengolah sinyal keypad yang masuk,
mikrokontroler dapat menghasilkan sinyal keluaran berdasarkan
program yang telah dibuat. Kemudian sinyal keluaran tersebut
dikuatkan dan digunakan untuk men-drive motor servo. Sehingga akan
membentuk sistem mekanik dan elektronik yang terintegrasi. Gambar
rangkaian kendali terdapat pada lampiran. Berikut adalah diagram blok
dari sistem elektronik:
Rectifier
Keypad Rangkaian
kendali Motor Servo
Listrik DC
Mekanik
Listrik AC 220 V

22
2.4 Cara Kerja
2.4.1 Pembagian biasa
Sistim pembagian pada dividing head digital ini sama dengan
sistim pembagian pada dividing head konvensional, yaitu dengan
menggunakan susunan ulir cacing dan roda gigi cacing. Yang
membedakan dengan dividing head konvensional adalah dividing head
digital ini system pemutarnya menggunakan motor servo yang
dikendalikan oleh mikrokontroler, bukan menggunakan piringan pembagi
seperti pada dividing head konvensional. Pada dividing head digital ini
menggunakan susunan ulir cacing dan roda gigi cacing dengan
perbandingan 50:1. Jadi untuk memutar benda kerja sebesar 360o ulir
cacing harus berputar 50 putaran. Penggerak dari ulir cacing ini adalah
motor servo, sedangkan ratio putaran antara ulir cacing dan motor servo
ini adalah 2:1. Jadi dapat dikatakan untuk memutar benda kerja sebesar
360o motor servo harus berputar 100 putaran.
Untuk mengatur putaran motor servo kita tinggal mengetikan pada
keypad yang tersedia. Keypad tersebut akan memberikan sinyal masukan
bagi mokrokontroler. Kemudian mikrokontroler yang sudah terprogram
tersebut mengolah sinyal dari keypad, kemudian menghasilkan sinyal
keluaran untuk memutar motor servo tersebut. Missal kita ingin membagi
lingkaran menjadi segi 8. Untuk membuatnya kita pasang benda tersebut
pada cekam dividing head, kemudian tekan angka 8 lalu OK. Selanjutnya
tinggal proses pengefraisan. Jika kita telah selesai mengfrais satu bidang,
untuk bidang berikutnya kita tinggal menekan tombol
contoh tersebut dengan sinyal input dari angka 8, mikrokontroler akan
mengolahnya menjadi sinyal untuk memutar motor servo sebesar 12,5
putaran. Dengan memutar motor servo sebesar 12,5 putaran berarti benda
kerja akan berputar 1/8 putaran. Setiap kali kita menekan tombol next
maka cekam motor servo akan berputar 12,5 putaran atau cekam
berputar sebesar 1/8 putaran secara searah. Sedangkan untuk membalik

23
2.4.2 Pengaturan sumbu poros dividing head
Sumbu poros cekam pada dividing head digital ini dapat diatur dari
sudut 0o sampai 90
o. Jika pada dividing head konvensioanal kita
mengatur sudut cekam dengan cara manual, pada dividing head digital ini
pengaturan sudut diatur menggunakan pemutar dengan memiliki susunan
roda gigi terentu. Pada dividing head digital ini pengaturan sumbu poros
menggunkan susunan roda gigi cacing dan ulir cacing. Susunan roda gigi
diatur sedemikian rupa sehingga ratio putaran antara pemutar dengan
sumbu putar vertical cekam adalah 900:1. Dengan ratio tersebut berarti
untuk memutar sumbu vertical sebesar 1o dapat dilakukan dengan cara
memutar pemutar sebesar 2,5 putaran. Dengan cara tersebut pengaturan
sudut vertical sumbu cekam akan lebih teliti.
2.4.3 Pembagian diferensial
Prinsip dari pembagian diferensial adalah pembagian dengan
melakukan 2 gerakan sekaligus yaitu bergerak maju-mundur dan berputar
secara beraturan. Pada dividing head digital ini gerakan maju-mundur
dan berputar pada cekam diatur oleh dua buah motor servo, yaitu motor
servo pembagi dan motor servo eretan yang dikendalikan oleh sebuah
mikrokontroler.
Semisal kita ingin membagi lingkaran menjadi segi 8 dengan sudut
aksial (kemiringan) 5 derajat, dengang diameter 40 dan panjang benda
yang akan dibentuk 20 mm. Kita set eretan dan benda kerja, setelah itu
kita tekan angka 8 lalu OK, kemudian tekan angka 5 lalu OKx, kemudian
tekan 40 lalu OKy, kemudian tekan 20 OKz . Dengan sinyal angka 8,
mikrokontroler akan mengolah menjadi putaran motor servo pembagi
sebesar 12,5 putaran atau 1/8 putaran cekam. Sedangkan 5, 40 dan 20
akan mengatur kecepatan putar pada 2 buah motor servo. Jika
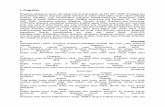
digambarkan maka akan membentuk segitiga siku-siku, seperti pada
gambar berikut:

24
Berdasarkan gambar tersebut, 5 merupakan sudut kemiringan,
sedangkan 20 merupakan panjang yang harus ditempuh oleh eretan.
Berdasarkan rumus trigonometri, maka panjang lintasan pembagi adalah
hasil kali antara panjang lintasan eretan dengan tangen dari sudut
kemiringan. Berdasarkan contoh, panjang lintasan pembagi = 20. tg 5 =
1,75. Sedangkan angka 40 menyebabkan cekam berputar sejauh 5,01o
sudut putar atau motor servo berputar sebanyak 18,036 putaran. Jadi
dengan memasukan angka 5, 40 dan 20 pada keypad akan menyebabkan
benda kerja dengan diameter 40 mm berputar sejauh 1,75mm dan eretan
bergeser 20mm dalam waktu yang bersamaan.
2.5 Perencanaan Biaya
Perkiraaan biaya yang dibutuhkan untuk pembelian bahan baku dan
komponen yang dibutuhkan adalah sebagai berikut:
No Bahan Ukuran Jml Harga sat Harga total
Material elektronik
1 Mikrokontroler ATMEGA 16 1 50000 50000
2 transformator stepdown/5A 1 150000 150000
3 keypad 1 10000 10000
4 LCD 1 30000 30000
5 motor servo 2 500000 1000000
6 sistem minimum
mikro 10000 10000
7 pcb dan
pelengkapnya 10000 10000
Material logam
Panjang lintasan pembagi Sudut kemiringan
Panjang lintasan eretan

25
1 Baja St 60 Ø 6" x 200mm 1 50000 50000
2 Baja St 40
Ø 1" x 600mm 1 30000 30000
Ø 2" x 200mm 1 20000 20000
Ø 2.25 x 100mm 1 20000 20000
Ø 3.25" x 100mm 1 30000 30000
Ø 5" x 200mm 1 20000 20000
3 Baja tuang 12 m3 12 250000 3000000
4 Baja ringan 40cm3 40 5000 200000
5 Bearing
Ø 10mm 4 15000 60000
Ø 18mm 2 20000 40000
Ø 22mm 1 30000 30000
Ø 30mm 4 40000 160000
Ø 40mm 2 50000 100000
Jumlah Rp 5.035.000,-

26
BAB III
KESIMPULAN
Dividing head digital ini merupakan pengembangan inovatif dari dividing
head konvensioanal yang ada. Dalam pengoperasianya dividing head ini cukup
mudah dan sederhana, sehingga mampu mengurangi factor human eror.
Kelebihan dari digital dividing head ini antara lain:
1. Sistim pembagianya cukup mudah yaitu dengan cara menekan keypad.
2. Dapat digunakan untuk pembagian diferensial tanpa menggunakan roda gigi
bantu.
3. Mampu mengurangi factor human eror, seperti salah pembagian
Adapun kekuranganya antara lain:
1. Pembagian ini menggunakan mikrokontroler, sedangkan mikrokontroler
rentan terhadap getaran
2. Motor servo yang digunakan harus memiliki torsi yang kuat.

27
Daftar Pustaka
Harsoadi dan Zainulah, Amin. 2007. Praktikal Konstrusi Baja. Direktorat
pembinaan sekolah menengah: Jakarta.
Kreith, Ed. Frank. 1999. Mechanical Enginering Handbook. Boca Raton: CRC
Press LLC.
Rochim, Taufik. Teori Dan Teknologi Proses Permesinan. Departemen Mesin
ITB. Bandung. 1993
Sularso, Kiyokatsu Suga. Dasar Perencanaan dan Pemilihan Elemen Mesin.
Pradya Paramita. Jakarta. 1987.
Sumbodo, Wirawan. 2008. Teknik Produksi Mesin Industri jilid1. Direktorat
pembinaan sekolah menengah: Jakarta.
Sumbodo, Wirawan. 2008. Teknik Produksi Mesin Industri jilid2. Direktorat
pembinaan sekolah menengah: Jakarta.
Sumbodo, Wirawan. 2008. Teknik Produksi Mesin Industri jilid3. Direktorat
pembinaan sekolah menengah: Jakarta.
Widarto. 2008. Teknik Pemesinan jilid1. Direktorat pembinaan sekolah menengah
kejuruan: Jakarta.
Widarto. 2008. Teknik Pemesinan jilid2. Direktorat pembinaan sekolah menengah
kejuruan: Jakarta.
http://books.google.com/?id=wUJVAAAAMAAJ .
http://elib.unikom.ac.id/gdl.php?mod=browse&op=read&id=jiptumm-gdl-s1-
2002-muhaimi-8693-roda_gigi
http://www.wikipedia.com/gigi