Control predictivo por desacoplo con compensación de perturbaciones para el benchmark de control...
10
www. revista-riai.org &RQWURO SUHGLFWLYR SRU GHVDFRSOR FRQ FRPSHQVDFL RQ GH SHUWXUEDFLRQHV SDUD HO EHQFKPDUN GH FRQWURO , )HUQ DQGH] & 5RGU ÕJXH] - / *X]P DQ ∗ 0 %HUHQJXHO ∗ Departamento de Lenguajes y Computaci ´ on, Universidad de Almer´ ıa, Ctra. Sacramento s/n 04120 Espa˜ na (e-mail: [email protected], [email protected], [email protected], [email protected]) 5HVXPHQ (VWH DUW ÕFXOR SUHVHQWD OD PHWRGRORJ ÕD XWLOL]DGD SDUD DERUGDU ORV SUREOHPDV GH PRGHODGR \ FRQWURO GH XQD FDOGHUD LQGXVWULDO SURSXHVWD HQ HO EHQFKPDUN GH LQJHQLHU ÕD GH FRQWURO GH /D HVWUDWHJLD GH FRQWURO UHVXOWDQWH VH EDVD HQ XQD FRPELQDFL RQ GH YDULRV DOJRULWPRV GH FRQWURO SUHGLFWLYR JHQHUDOL]DGR PRQRYDULDEOHV FRQ FRPSHQVDFL RQ SRU GHVDFRSOR SDUD OD LQWHUDFFLRQHV HQWUH YDULDEOHV \ XVR H[WHUQR GH FRPSHQVDGRUHV SRU DGHODQWR SDUD HO UHFKD]R GH SHUWXUEDFLRQHV PHGLEOHV $GHP DV VH SUHVHQWD HO GLVH× QR GH GLYHUVRV ¿OWURV LQWHUQRV H H[WHUQRV DO DOJRULWPR GH FRQWURO SUHGLFWLYR SDUD DXPHQWDU OD UREXVWH] GHO DOJRULWPR GH FRQWURO \ PHMRUDU OD DWHQXDFL RQ GHO UXLGR HQ ODV VH × QDOHV Copyright F 2011 CEA. 3DODEUDV &ODYH &RQWURO SRU GHVDFRSOR &RQWURO SRU $GHODQWR &RQWURO 3UHGLFWLYR *HQHUDOL]DGR %HQFKPDUN &DOGHUD ,QGXVWULDO ,1752'8&&, 21 /D RUJDQL]DFL RQ GH SURSXHVWDV GH EHQFKPDUNV SRU SDUWH GHO JUXSR GH ,QJHQLHU ÕD GH &RQWURO GH &($ KD PRVWUDGR XQ JUDQ LQWHU HV SRU SDUWH GH OD FRPXQLGDG GH OD $XWRP DWLFD GXUDQWH ORV XOWLPRV D× QRV H[LVWLHQGR XQ JUDQ Q XPHUR GH DSRUWDFLRQHV *DUF ÕD6DQ] DQG (OVR $OIDUR et al. 5H\QRVR 0H]D et al. (VWH WLSR GH SURSXHVWDV SHUPLWHQ OD SDUWL FLSDFL RQ FRQMXQWD GH LQYHVWLJDGRUHV H[SHULPHQWDGRV \ GH HVWX GLDQWHV GH JUDGR \ SRVWUDGR GRQGH VH WUDWD GH DSOLFDU W HFQLFDV GH FRQWURO D XQ SUREOHPD GHWHUPLQDQGR IXQGDPHQWDOPHQWH FRQ FDU DFWHU LQGXVWULDO (Q OD SURSXHVWD GH OD FRQYRFDWRULD VH SODQWH R HO SUREOHPD GH FRQWURO GH XQD FDOGHUD LQ GXVWULDO TXH IRUPD SDUWH GH SURFHVRV GH FDOHIDFFL RQ \ JHQHUD FL RQ GH HQHUJ ÕD HO HFWULFD 'LFKR VLVWHPD HV DOWDPHQWH ULFR HQ SUREOHPDV GH FRQWURO VLHQGR XQ VLVWHPD PXOWLYDULDEOH FRQ WUHV HQWUDGDV FRPEXVWLEOH DLUH \ DJXD \ WUHV VDOLGDV SUHVL RQ GH YDSRU R[ ÕJHQR HQ H[FHVR \ QLYHO GH DJXD HQ HO FDOGHU ÕQ FRQ SHUWXUEDFLRQHV PHGLEOHV \ QR PHGLEOHV UXLGR HQ ODV VH× QDOHV \ UHVWULFFLRQHV GH SURFHVR WDQWR GH DPSOLWXG FRPR GH YHORFLGDG GH YDULDFL RQ HQ ODV HQWUDGDV \ VDOLGDV (VWH DUW ÕFXOR GHVFULEH ODV HWDSDV OOHYDGDV D FDER SDUD UHDOL]DU HO PRGHODGR \ FRQWURO GH HVWH SURFHVR LQGXVWULDO VLHQGR HVWD SURSXHVWD GH HVWUDWHJLD GH FRQWURO OD JDQDGRUD HQ HO FRQFXUVR SODQWHDGR SDUD HVWH EHQFKPDUN GH $XQTXH H[LVWH XQ JUDQ DEDQLFR GH W HFQLFDV GH FRQWURO SDUD SRGHU DERUGDU HVWH SUREOHPD VH SODQWH R HO XVR GHO DOJRULWPR GH FRQWURO SUHGLFWLYR JHQHUDOL]DGR *3& GHELGR D OD H[SHULHQFLD TXH HO JUXSR GH $X WRP DWLFD (OHFWU RQLFD \ 5RE RWLFD GH OD 8QLYHUVLGDG GH $OPHU ÕD SRVHH HQ HVWH FDPSR /D HVWUDWHJLD GH FRQWURO SODQWHDGD VH EDVD HQ HO XVR GH YDULRV FRQWURODGRUHV SUHGLFWLYRV PRQRYDULDEOHV FRQ ¿OWUDGR LQWHUQR SDUD HO DXPHQWR GH OD UREXVWH] GHO DOJRULWPR GH FRQWURO \ DWHQXDU HO UXLGR GH OD VH × QDOHV DV Õ FRPR HO XVR GH FRP SHQVDFL RQ H[WHUQD GH SHUWXUEDFLRQHV PHGLEOHV H LQWHUDFFL RQ HQ WUH YDULDEOHV (V QHFHVDULR GHVWDFDU TXH HO SUREOHPD GH FRQWURO VH SRGU ÕD KDEHU DERUGDGR FRQ XQ DOJRULWPR GH FRQWURO SUHGLF WLYR JHQHUDOL]DGR PXOWLYDULDEOH H LQFOX\HQGR OD FRPSHQVDFL RQ LQWHUQD GH SHUWXUEDFLRQHV PHGLEOHV 6LQ HPEDUJR HO SUREOHPD GH FRQWURO VH SODQWH R FRPHQ]DQGR SRU HO SODQWHDPLHQWR GH HV WUDWHJLDV GH FRQWURO VHQFLOODV \ VH IXH DXPHQWDQGR VX FRPSOH MLGDG GH PDQHUD SURJUHVLYD (Q HVWH VHQWLGR OD HVWUDWHJLD GH FRQWURO ¿QDOPHQWH SUHVHQWDGD HQ HVWH WUDEDMR REWXYR UHVXOWDGRV VDWLVIDFWRULRV SDUD ORV REMHWLYRV SODQWHDGRV HQ HO EHQFKPDUN \ SRU WDQWR QR VH RSW R SRU XVDU RWUDV HVWUDWHJLDV GH FRQWURO P DV DYDQ]DGDV WDOHV FRPR ODV DQWHULRUPHQWH PHQFLRQDGDV &RPR VH PRVWUDU D D OR ODUJR GHO DUW ÕFXOR OD PHWRGRORJ ÕD GH WUDEDMR ¿QDOPHQWH GHVDUUROODGD VH EDVD HQ VHJXLU ODV HWDSDV FO DVLFDV GH FDU DFWHU GLG DFWLFR TXH VH VXHOHQ OOHYDU D FDER GH PDQHUD H[SHULPHQWDO SDUD UHDOL]DU ORV SUREOHPDV GH PRGHODGR \ FRQWURO GH FXDOTXLHU SUREOHPD LQGXVWULDO (O DUW ÕFXOR VH HQFXHQWUD RUJDQL]DGR GH OD VLJXLHQWH IRUPD /D VHFFL RQ GHVFULEH EUHYHPHQWH ODV SULQFLSDOHV FDUDFWHU ÕVWLFDV GHO SURFHVR LQGXVWULDO SODQWHDGR HQ HO EHQFKPDUN GH FRQWURO 3RV WHULRUPHQWH HQ OD VHFFL RQ VH PXHVWUDQ ORV HQVD\RV UHDOL]DGRV SDUD H[WUDHU LQIRUPDFL RQ GHO SURFHVR \ SRGHU REWHQHU HO PRGHOR GHO PLVPR DV Õ FRPR GH ODV LQWHUDFFLRQHV HQWUH VXV YDULDEOHV \ ODV SHUWXUEDFLRQHV PHGLEOHV $ FRQWLQXDFL RQ HQ HO DSDUWDGR VH GHVDUUROOD XQD PHWRGRORJ ÕD SDUD HO GLVH× QR GHO HVTXHPD GH FRQWURO SURSXHVWR \ VX VLQWRQ ÕD HQ EDVH D ODV HVSHFL¿FDFLRQHV SODQWHDGDV HQ HO EHQFKPDUN )LQDOPHQWH VH PXHVWUDQ ORV UHVXO WDGRV REWHQLGRV \ VH GHVFULEHQ ODV FRQFOXVLRQHV GHULYDGDV GH OD UHDOL]DFL RQ GH HVWH WUDEDMR '(6&5,3&, 21 '(/ %(1&+0$5. '( &21752/ (O EHQFKPDUN GH FRQWURO SURSXHVWR SRU HO JUXSR WHP DWLFR GH ,QJHQLHU ÕD GH &RQWURO GH &($ SDUD HO D× QR VH EDVD HQ XQ SURFHVR TXH UHSURGXFH FRQ SHTXH× QDV PRGL¿FDFLRQHV HO ISSN: 1697-7912. Vol.8, Núm. 2, Abril 2011, pp. 112-121 Publicado electrónicamente: 08/04/2011 DOI: 10.4995/RIAI.2011.02.14
Transcript of Control predictivo por desacoplo con compensación de perturbaciones para el benchmark de control...

www. revista-riai.org
∗ ∗ ∗ ∗
∗ Departamento de Lenguajes y Computacion, Universidad de Almerıa, Ctra.Sacramento s/n 04120 Espana (e-mail: [email protected], [email protected],
[email protected], [email protected])
Copyright© 2011 CEA.
et al.et al.
ISSN: 1697-7912. Vol.8, Núm. 2, Abril 2011, pp. 112-121
Publicado electrónicamente: 08/04/2011 DOI: 10.4995/RIAI.2011.02.14

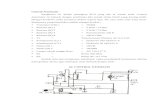
22,10Kg/s 2,24 MPa
[Y1(s)Y2(s)Y3(s)
]=
[G11(s) 0 G13(s)G21(s) G22(s) 0G31(s) 0 G33(s)
]·[
U1(s)U2(s)U3(s)
]+
+
[G1d(s)
0G3d(s)
]· D(s)
Yi(s) Y1(s)Y2(s) Y3(s)
Ui(s) U1(s)U2(s) U3(s) Gij(s)
i j D(s)Gid(s)
i
Y1(s) U1(s) Y2(s)U2(s) Y3(s) U3(s)
Cc
Je
IAEi
ITAEi
0,25
IADUi
Cr
ei(t)ui(t)
tiempo tipoi
I. Fernández, C. Rodríguez, J. L. Guzman, M. Berenguel 113

tcambio
IAEi =∫ tiempo
0
|ei(t)|dt
ITAEi =∫ tiempo
tcambio
(t − tcambio)|ei(t)|dt
IADUi =∫ tiempo
0
∣∣∣dui(t)dt
∣∣∣dt
Je(Cc) =
∑3i=1
(IAEi(Cc)IAEi(Cr) + tipoi
ITAEi(Cc)ITAEi(Cr) + 0,25 IADUi(Cc)
IADUi(Cr)
)3 +
∑3i=1 tipoi + 0,75
3.1 Modelos para la entrada de combustible
10 %
10 %
10 %
10 %
G11(s) =0,355
24,75s + 1e−6,75s
G21(s) =−6,36
5,5s + 1e−5,5s
G31(s) =0,9263s − 0,005733
21,74s2 + se−2,45s
3.2 Modelos para la entrada de aire
10 % t = 100
114 Control Predictivo por Desacoplo con Compensación de Perturbaciones para el Benchmark de Control 2009-2010

10 %
G22(s) =5,86
6s + 1e−7s
3.3 Modelos para la entrada de agua
10 %
10 %
G13(s) =−0,1737
149,6s + 1
G33(s) =0,01052
se−17,3s
10 %
3.4 Modelos para la demanda (perturbacion medible)
t = 300
10 %
10 %
I. Fernández, C. Rodríguez, J. L. Guzman, M. Berenguel 115

G1d(s) =−0,712
195,8s + 1
G3d(s) =0,154s − 0,001441
14,36s2 + se−5,32s
T
b
4.1 Controlador Predictivo Generalizado
a
J =N2∑
j=N1
δ(j)[y(k + j|t) − w(k + j)]2+
+Nu∑j=1
λ(j)[Δu(k + j − 1)]2
y(k + j|t)
k Δu(k + j − 1)
Δ = (1−z−1) N1 N2
Nu
δ(j) λ(j)
δ(j) = 1 λ(j) = λ
w(k + j)
y(k)
b
u(t) Δu(t)y(t)
umin ≤ u(t) ≤ umax,∀t ≥ 0
Δumin ≤ u(t) − u(t − 1) ≤ Δumax,∀t ≥ 0
ymin ≤ y(t) ≤ ymax,∀t ≥ 0
umin umax
Δumin Δumax
ymin
ymax
j k y(k + j|t)
A(z−1)y(t) = z−dB(z−1)Δu(t − 1) + C(z−1)e(t)Δ
u(t) y(t) e(t)d
A(z−1) B(z−1) C(z−1)z−1
A(z−1) = 1 + a1z−1 + a2z
−2 + ... + anaz−na
B(z−1) = b0 + b1z−1 + b2z
−2 + ... + bnbz−nb
C(z−1) = c0 + c1z−1 + c2z
−2 + ... + cncz−nc
C(z−1) = 1
116 Control Predictivo por Desacoplo con Compensación de Perturbaciones para el Benchmark de Control 2009-2010

J = (y − w)T (y − w) + λΔuT Δu
yy = GΔu + f G
f
J =12ΔuT HΔu + bT Δu + f0
Δu = −H−1b
H = 2(GT G + λI) bT = 2(f − w)T G f0 = (f −w)T (f − w)
b
4.2 Diseno por adelanto para la perturbacion medible
Gff (s) =−Gp(s)Gs(s)
Gp(s)
Gs(s)
G11(s) G33(s)
Gff,1d(s) =0,33(24,7s + 1)
195,8s + 1
Gff,3d(s) =0,4
14,36s + 1
4.3 Diseno de controladores por adelanto para la interaccionentre variables
Gff,12(s) =0,8(6s + 1)24,75s + 1
Gff,13(s) =0,33
24,7s + 1
I. Fernández, C. Rodríguez, J. L. Guzman, M. Berenguel 117

4.4 Diseno de los filtros
T
C(z−1)T (z−1)
b
T (z−1) = (1 − 0, 8z−1)n
n ∈ N n
T
T (z−1) = A(z−1)(1−τz−1)n n A(z−1)
τ
T1(z−1) = 1 − 25,672z−1 + 22,82z−2
T2(z−1) = 1. − 6,967z−1 + 5,80z−2
T
0,2
F3(z−1) =0,05
z − 0,95
N
N1 = d + 1N2 = N + dNu = N
N
λ
λ d
0,2
5.1 Resultados ante cambio en la demanda
10 %
Je = 0,1674
5.2 Resultados ante cambio en las referencias
10 %
118 Control Predictivo por Desacoplo con Compensación de Perturbaciones para el Benchmark de Control 2009-2010

Je = 0,5388
Je = 0,5719
Je = 0,7129
T
RIAI, Revista Iberoamericana deAutomatica e Informatica Industrial
Computer controlledsystems: Theory and design
aRIAI, Revista Iberoamericana de
Automatica e Informatica Industrialb Model predictive
control (second edition)
RIAI, Revista Iberoamericana de Automatica eInformatica Industrial
http://www.dia.uned.es/˜fmorilla/benchmark09_10/
IEEE Transactions on Control System Technology
RIAI, Revista Iberoamericana de Automaticae Informatica Industrial
IEE Proceedings-D
I. Fernández, C. Rodríguez, J. L. Guzman, M. Berenguel 119

120 Control Predictivo por Desacoplo con Compensación de Perturbaciones para el Benchmark de Control 2009-2010

I. Fernández, C. Rodríguez, J. L. Guzman, M. Berenguel 121