Computer vision
16
Kecerdasan Buatan (MKB140)
-
Upload
wahyu-wahyuutias -
Category
Education
-
view
286 -
download
6
Transcript of Computer vision

Kecerdasan Buatan (MKB140)

• Ilmu pengetahuan yang mempelajari bagaimana komputer dapat mengenali obyek yang diamati/ diobservasi.
• Computer Vision (CV) adalah salah satu bentuk aplikasi teknologi komputer dalam kehidupan dunia nyata (real world). Konsep dasar yang melandasi computer vision adalah “Computer becomes Seeing Machines”, menjadikan komputer sebagai mesin yang mampu menangkap informasi visual yang ada di lingkungannya.
• Computer Vision adalah kombinasi antara Pengolahan Citra dan Pengenalan Pola. Pengolahan Citra merupakan bidang yang berhubungan dengan proses transformasi citra (image). Proses ini bertujuan untuk mendapatkan kualitas citra yang lebih baik. Sedangkan Pengenalan Pola berhubungan dengan proses identifikasi obyek pada citra atau interpretasi citra. Proses ini bertujuan untuk mengekstrak informasi/pesan yang disampaikan oleh gambar/citra.
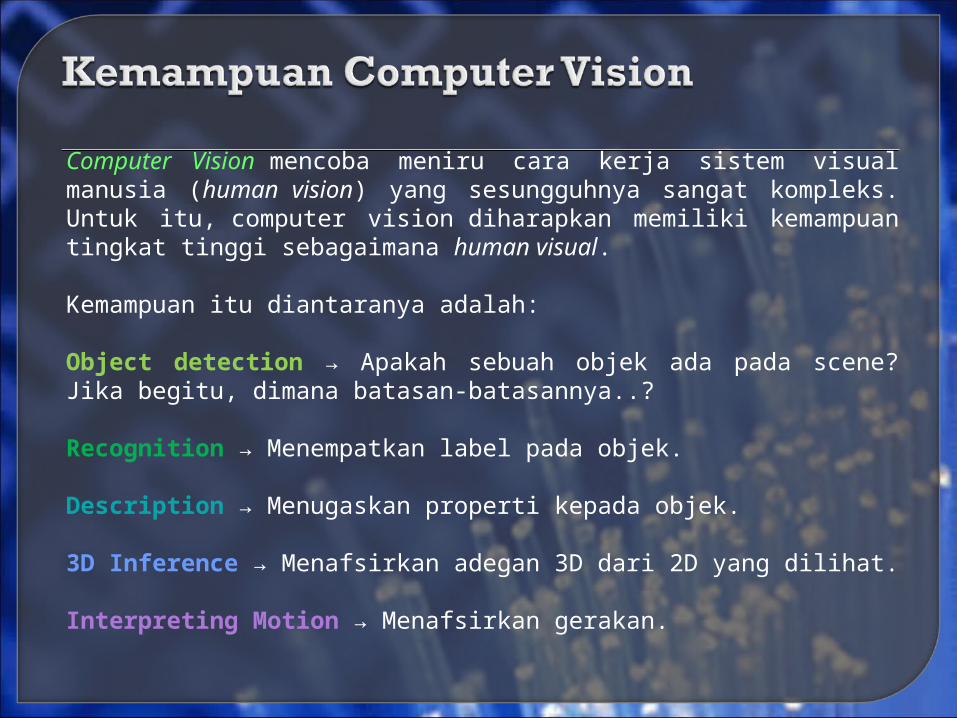
Computer Vision mencoba meniru cara kerja sistem visual manusia (human vision) yang sesungguhnya sangat kompleks. Untuk itu, computer vision diharapkan memiliki kemampuan tingkat tinggi sebagaimana human visual.
Kemampuan itu diantaranya adalah:
Object detection → Apakah sebuah objek ada pada scene? Jika begitu, dimana batasan-batasannya..?
Recognition → Menempatkan label pada objek.
Description → Menugaskan properti kepada objek.
3D Inference → Menafsirkan adegan 3D dari 2D yang dilihat.
Interpreting Motion → Menafsirkan gerakan.

Manusia memiliki kemampuan untuk menguraikan tulisan tangan yang ceroboh, mengenal dan mengklasifikasikan citra, mengidentifikasikan citra yang terhalang sebagian pada lingkungan yang noisy, mengidentifikasikan objek dengan orientasi dan skala yang berbeda, serta kedalaman persepsi.
Pengembangan sistem computer vision untuk melaksanakan tugas-tugas seperti ini membutuhkan proses yang kompleks. Biasanya, untuk setiap aplikasi yang diberikan, keseluruhan tugas tidak dapat dilaksanakan pada sebuah tahapan tunggal. Oleh karena itu, sistem computer vision seringkali dibagi ke dalam beberapa tahapan, dan setiap tahapan melaksanakan satufungsi atau lebih.
Sistem computer vision terdiri dari tahapan-tahapan seperti :
Perolehan Citra Preprocessing Pengekstraksian Fitur Penyimpanan Objek secara Asosiatif Pengaksesan suatu Basis Pengetahuan Pengenalan.


Sebagai suatu disiplin ilmu, computer vision berusaha untuk menerapkan teori dan model untuk pembangunan computer vision system.
Aplikasi pada computer vision mencakup berbagai macam sistem, yaitu:
1.Pengendalian proses (misalnya, sebuah robot industri atau kendaraan otonom).2.Mendeteksi peristiwa (misalnya, untuk pengawasan visual atau penghitungan orang).3.Mengorganisir Informasi (misalnya, untuk pengindeksan database foto dan gambar urutan).4.Modeling benda atau lingkungan (misalnya, industri inspeksi, analisis gambar medis / topografis).5.Interaksi (misalnya, sebagai input ke perangkat untuk interaksi manusia komputer).

Teknologi baru yang berpotensial untuk mengubah pola hidup masyarakat, untuk lebih spesifiknya, mengubah sistem transportasi yang menggerakkan masyarakat sehari-hari.
Dengan diciptakannya kendaraan otonom, diharapkan jaringan transportasi kedepannya bisa lebih aman. Kendaraan otonom adalah kendaraan yang dapat beroperasi dengan aman dan efektif tanpa perlu dikendalikan oleh manusia.
Kendaraan ini terdiri atas kumpulan sistem-sistem yang saling bekerja sama untuk memungkinkan kendaraan tersebut melintasi lingkungannya. Salah satu sistem yang paling penting adalah sensor.

Kendaraan otonom menggunakan sebuah komputer pusat untuk memproses data-data yang diterima oleh sensor.
Dengan menggunakan algoritma yang berbeda-beda, komputer dapat menentukan jalur mana harus diambil. Baru kemudian komputer pusat memerintahkan mobil untuk melakukan tindakan yang sesuai.

Google Driverless Car merupakan proyek dari Google yang dipimpin oleh Sebastian Thurn. Ketika sahabatnya meninggal dalam kecelakaan mobil, dia men-dedikasikan hidupnya untuk menyelamatkan orang lain dari kecelakaan mobil, sehingga dia membuat driverless car.
Sebastian Thurn

Google Driverless Car merupakan mobil otonom yang dapat mengendalikan dirinya sendiri untuk memudahkan transportasi manusia.
Sebuah kendaraan otonom dapat mendeteksi lingkungan di sekitarnya dan dapat menavigasi dirinya sendiri dengan bantuan sensor-sensor yang ada padanya. Pada pengembangannya saat ini, manusia/operator dapat mengatur destinasi yang diinginkan tanpa perlu melakukan kegiatan mekanis seperti memindahkan gigi atau menginjak kopling mobil untuk mengoperasikan mobil itu.

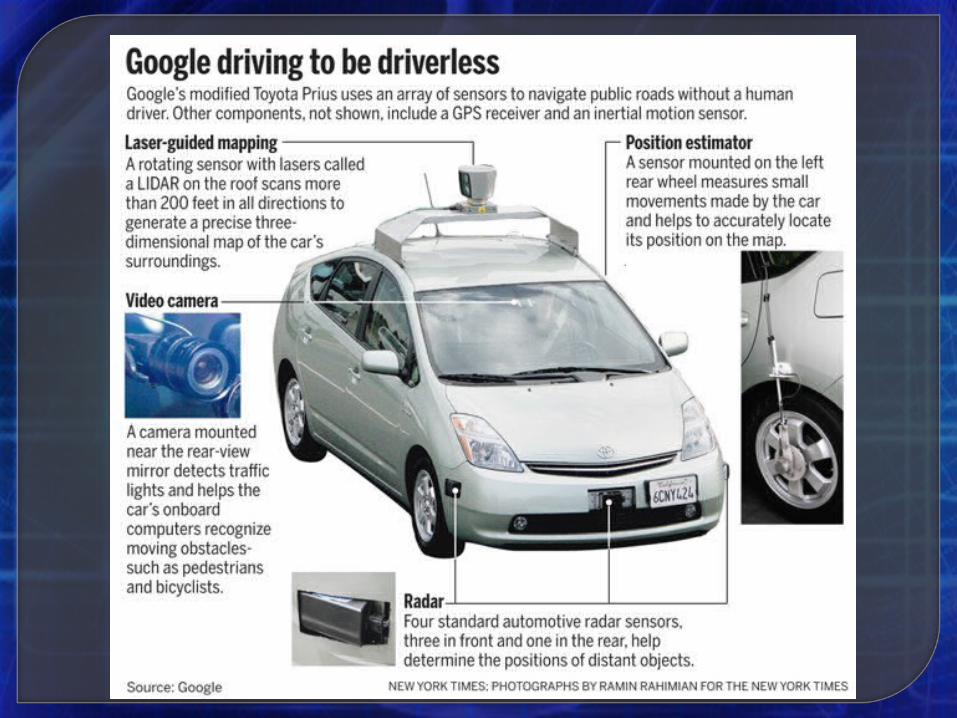
1. LIDAR (Light Detection and Ranging)
2. Position Estimator
3. Video Camera
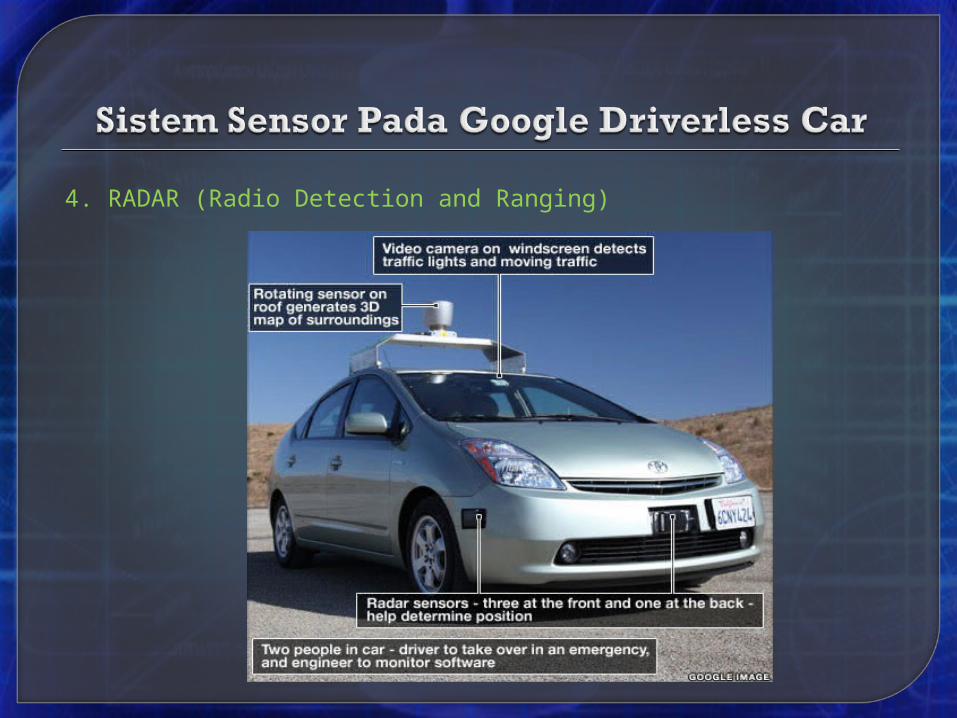
4. RADAR (Radio Detection and Ranging)

Sampai saat ini, penelitian mobil otonom telah menunjukkan hasil yang menjanjikan. Diperlukan dukungan lebih dari pemerintah dan masyarakat untuk dapat mengembangkannya lebih lanjut, terutama dari segi finansial dan hukum.
Berikut adalah beberapa keuntungan yang dapat kita peroleh dari penelitian mobil otonom :
•Navigasi turn-by-turn yang lebih baik.
•Informasi pemetaan real-time yang lebih baik.
•Desain jalan yang lebih baik.
•Rambu-rambu lalu lintas yang baru.
•Infrastruktur yang baru.
•Interaksi baru antar manusia dengan komputer.