
BLDC Motor
19
BAB II TINJAUAN PUSTAKA 2.1 Kajian Pustaka Penelitian selanjutnya M. Wildan Hilmi (2011), yaitu mengatur kecepatan motor DC magnet permanen dengan menggunakan sensor rotary, pada aplikasi pengaturan kecepatan motor DC dengan menggunakan sensor rotary ini dibutuhkan motor dengan kecepatan tinggi sehingga pemilihan motor harus meningkatkan kecepatan tinggi. Dimana spesifikasi motor penggerak adalah: tegangan 12 VDC, Arus 3 A, Daya motor 40 W, kecepatan 2350 Rpm, Torsi 140 N cm dan penggerak sensor yang dibutuhkan roda untuk memutar sensor dengan tujuan mensimulasikan putaran roda, spesifikasi motor tersebut adalah: tegangan 12 VDC, Daya motor 24 W, Kecepatan 500 rpm, Torsi 25 N cm. dari hasil pengujian dan analisa bahwa alat pengatur kecepatan motor DC magnet permanen dengan menggunakan sensor rotary berhasil dibuat sesuai dengan rancangan spesifikasi yang ditentukan. Penelitian selanjutnya P.S Huda dan M. Nur Yuniarto (2014), mengenai Axial Flux Coreless Brushless DC Motor. Motor hasil rancang bangun mengenai Axial Flux Coreless Brushless DC Motor memiliki daya output 345
-
Upload
pratama-putra-hp -
Category
Documents
-
view
367 -
download
23
description
BLDC Motor BAB II
Transcript of BLDC Motor
BAB II
TINJAUAN PUSTAKA
2.1 Kajian Pustaka
Penelitian selanjutnya M. Wildan Hilmi (2011), yaitu mengatur kecepatan motor DC
magnet permanen dengan menggunakan sensor rotary, pada aplikasi pengaturan kecepatan
motor DC dengan menggunakan sensor rotary ini dibutuhkan motor dengan kecepatan tinggi
sehingga pemilihan motor harus meningkatkan kecepatan tinggi. Dimana spesifikasi motor
penggerak adalah: tegangan 12 VDC, Arus 3 A, Daya motor 40 W, kecepatan 2350 Rpm, Torsi
140 N cm dan penggerak sensor yang dibutuhkan roda untuk memutar sensor dengan tujuan
mensimulasikan putaran roda, spesifikasi motor tersebut adalah: tegangan 12 VDC, Daya motor
24 W, Kecepatan 500 rpm, Torsi 25 N cm. dari hasil pengujian dan analisa bahwa alat pengatur
kecepatan motor DC magnet permanen dengan menggunakan sensor rotary berhasil dibuat
sesuai dengan rancangan spesifikasi yang ditentukan.
Penelitian selanjutnya P.S Huda dan M. Nur Yuniarto (2014), mengenai Axial Flux
Coreless Brushless DC Motor. Motor hasil rancang bangun mengenai Axial Flux Coreless
Brushless DC Motor memiliki daya output 345 Watt tidak jauh dari yang di harapkan yakni 500
Watt. Hasil rancang bangun Axial Flux Coreless Brushless DC Motor memiliki efisiensi
maksimum 84.31 % pada kecepatan putar 553.4 Rpm, dan torsi peak 15.85 N/m. untuk
memaksimalkan output 345 W agar mendekati 500 W maka dilakukan adalah menaikan operasi
controller, yang secara teoritis meningkatkan daya sesuai dengan persamaan dasar. Daya output
maksimum didapat 49.07 V dan arus 9.03 A, efisiensi 77.9 % maka tegangan dinaikan V=
(500/77.9%)/9.03=71.09 V.
2.2 Dasar Teori
2.2.1 Motor listrik DC
Motor Dc merupakan mesin listrik yang memerlukan suplai tegangan searah untuk
pengoprasianya. Motor ini memiliki kesederhanaan dalam pengoprasiannya tetapi di sisi lain
memerlukan perawatan berkala dan harganya mahal. Di lapangan jenis motor DC bermacam-
macam, diantaranya motor DC penguat terpisah, motor DC penguat seri, motor DC penguat
shunt dan motor DC penguat compound. Untuk dapat mengoperasikan dan melakukan perawatan
motor DC maka perlu dipahami konsep dasar bagaimana suatu motor DC berputar. Bagian-
bagian motor DC juga perlu dikenali seperti stator, rotor, komutator sikat dan elemen motor
lainnya. Karakteristik motor juga harus dipahami agar dalam pengoprasianya, motor dapat
bekerja dengan optimal.
Teori dasar dari motor DC diawali dengan sebuah konduktor yang dialiri listrik berada di
dalam suatu medan magnetik akan mengalami gaya tarik yang arahnya tegak lurus terhadap arus
listrik dan medan magnetik konduktor bisa terbuat dari besi, tembaga atau aluminium.
(a) Pengaturan percobaan (b) Arah I, F dan B saling lurus
Gambar 2.1 Gaya pada kawat di dalam medan magnetik
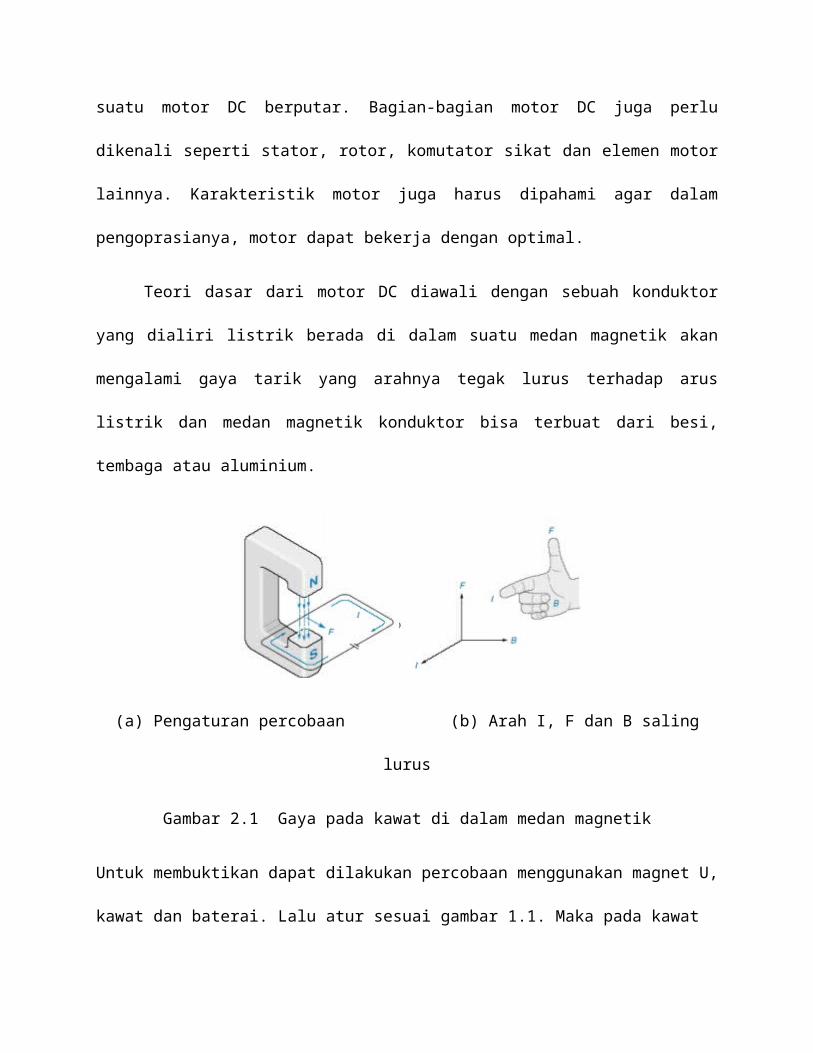
Untuk membuktikan dapat dilakukan percobaan menggunakan magnet U, kawat dan baterai.
Lalu atur sesuai gambar 1.1. Maka pada kawat akan ada hentakan saat baterai dihubungkan.
Besarnya magnitude dari gaya tersebut dapat dihitung persamaan berikut:
F=IBLsinθ……………………………………….(1)
Dengan
F= gaya pada konduktor (newton)
I = arus pada konduktor (ampere)
B= kerapatan fluks magnetik (Gauss)
L= panjang kawat (meter)
Θ= sudut antara arus dan medan magnetik
Motor listrik memanfaatkan prinsip ini untuk membuat suatu putaran yaitu dengan
membentuk kawat menjadi suatu lup dan menempatkan di dalam medaan magnetik. (Gambar
1.2)
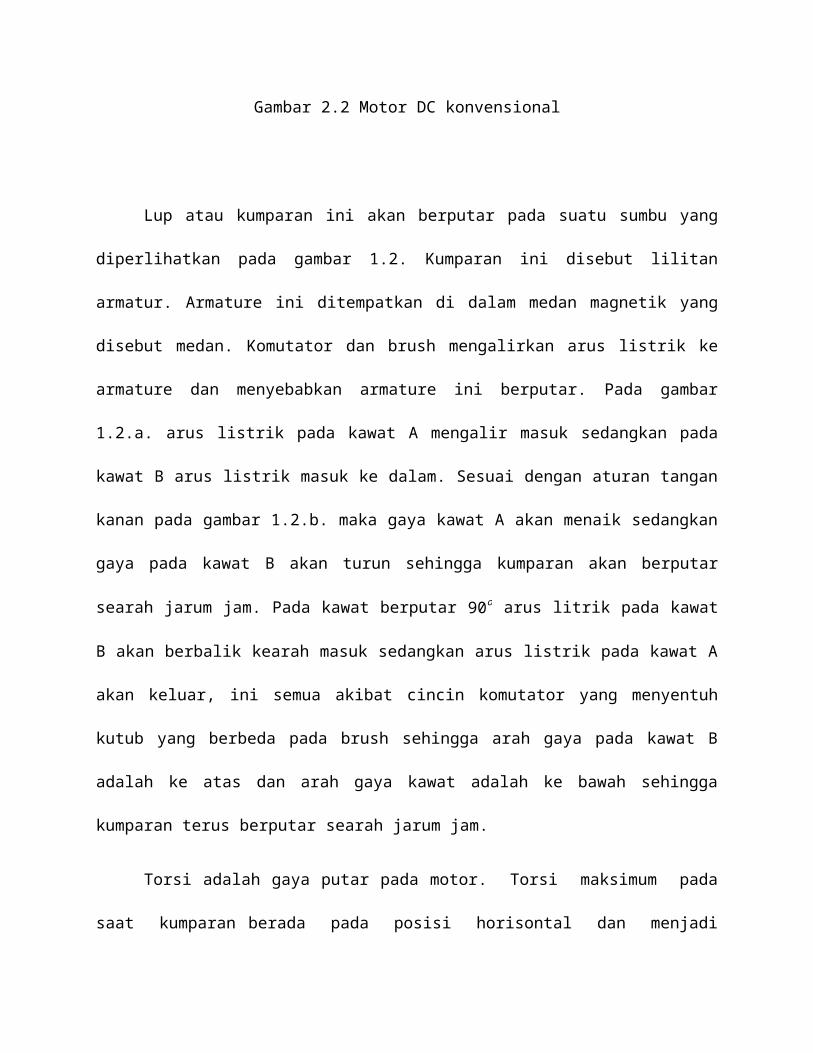
Gambar 2.2 Motor DC konvensional
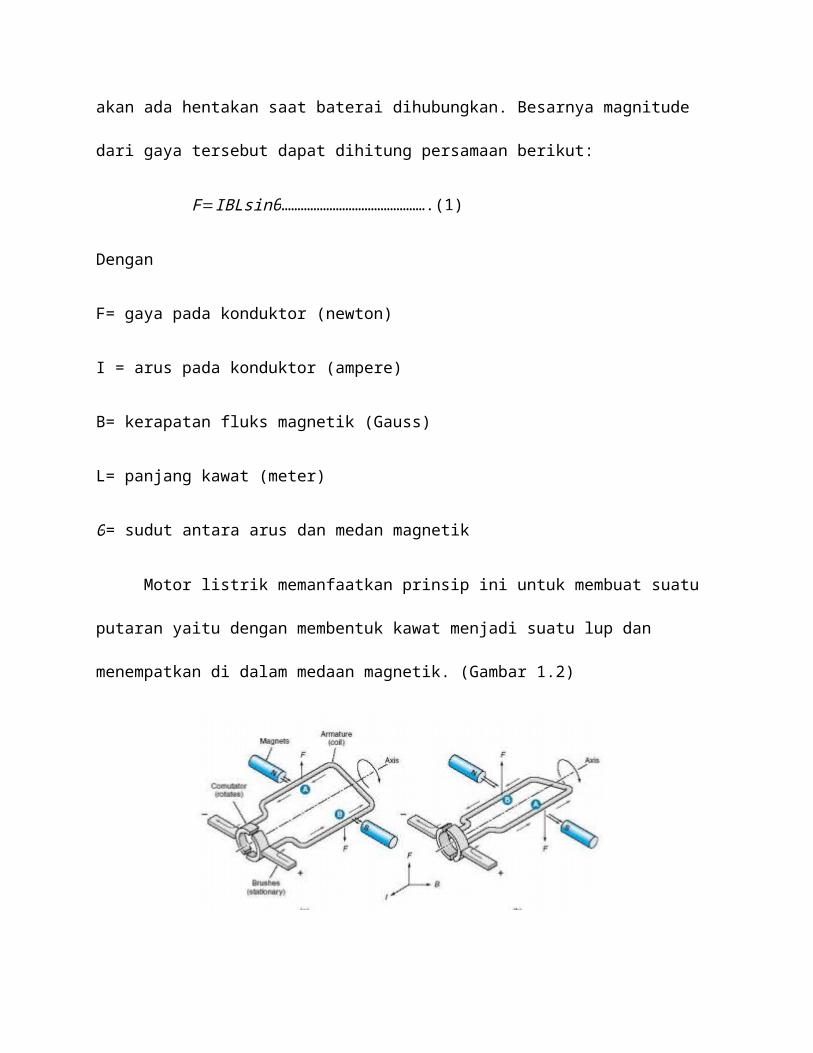
Lup atau kumparan ini akan berputar pada suatu sumbu yang diperlihatkan pada gambar
1.2. Kumparan ini disebut lilitan armatur. Armature ini ditempatkan di dalam medan magnetik
yang disebut medan. Komutator dan brush mengalirkan arus listrik ke armature dan
menyebabkan armature ini berputar. Pada gambar 1.2.a. arus listrik pada kawat A mengalir
masuk sedangkan pada kawat B arus listrik masuk ke dalam. Sesuai dengan aturan tangan kanan
pada gambar 1.2.b. maka gaya kawat A akan menaik sedangkan gaya pada kawat B akan turun
sehingga kumparan akan berputar searah jarum jam. Pada kawat berputar 90o arus litrik pada
kawat B akan berbalik kearah masuk sedangkan arus listrik pada kawat A akan keluar, ini semua
akibat cincin komutator yang menyentuh kutub yang berbeda pada brush sehingga arah gaya
pada kawat B adalah ke atas dan arah gaya kawat adalah ke bawah sehingga kumparan terus
berputar searah jarum jam.
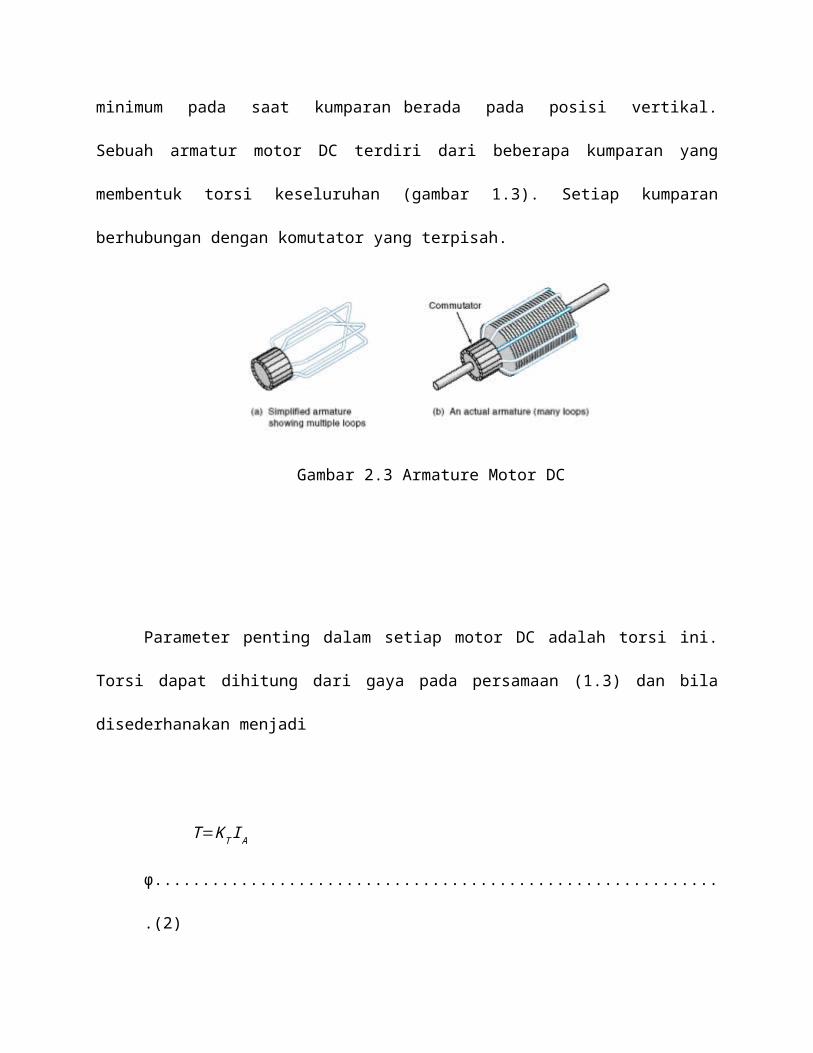
Torsi adalah gaya putar pada motor. Torsi maksimum pada saat kumparan berada
pada posisi horisontal dan menjadi minimum pada saat kumparan berada pada posisi
vertikal. Sebuah armatur motor DC terdiri dari beberapa kumparan yang membentuk torsi
keseluruhan (gambar 1.3). Setiap kumparan berhubungan dengan komutator yang terpisah.
Gambar 2.3 Armature Motor DC
Parameter penting dalam setiap motor DC adalah torsi ini. Torsi dapat dihitung dari gaya
pada persamaan (1.3) dan bila disederhanakan menjadi
T=KT I A φ............................................................(2)
Dengan:
T= Torsi motor
KT= Konstanta yang tergantung dari konstruksi motor
I A = Arus armatur
φ = fluks magnetik
Motor DC dapat bekerja sebaliknya yaitu mengubah energi mekanik gerak menjadi
energi listrik yang disebut dengan generator. Saat ada gaya putar luar memutar komutator, motor
Dc menimbulkan tegangan disebut electromotive force (EMF). Tapi saat motor DC digerakkan
oleh daya listrik terdapat tegangan balik yang arahnya berlawanan dengan arus armature yang
disebut dengan arus armature disebut dengan counter-electromotive force (CEMF). CEMF ini
mengurangi tegangan armature (V A ). CEMF ini meningkat dengan meningkatnya laju putar
motor dan sebaliknya akan berkurang saat laju motor berkurang.
V A=V ¿−CEMF………………………………………..(3)
Motor DC memiliki kemampuan untuk mempertahankan lajunya saat dihubungkan
dengan beban yang disebut dengan Self-regulation speed. Saat beban meningkat laju berkurang
sekaligus menurunkan CEMF. Saat CEMF menurun tegangan armature akan kembali naik dan
menyebabkan laju motor meningkat kembali.
2.2.2 Brushless DC Motor (BLDC)
Brushless DC motor (BLDC motor) yang juga dikenal sebagai electronically commutated
motors (ECMs) adalah tipe motor sinkron yang memakai sumber listrik arus searah sebagai
tenaganya. Arus searah yang digunakan umumnya bersumber dari arus bolak-balik yang
kemudian disearahkan dengan inverter.
BLDC motor memiliki prinsip kerja yang hampir sama dengan motor stepper namun
penggunaan istilah motor stepper kurang tepat bagi BLDC motor karena pengertian dari motor
stepper itu sendiri digunakan untuk jenis motor yang di desain secara spesifik untuk dapat
dioperasikan dalam mode positioning yang akurat dimana bagian motor mampu berhenti di
posisi angular yang diinginkan.
Dua parameter performa BLDC motor yang paling utama adalah konstanta motor Kv
dan Km.
Secara performa, BLDC motor dapat menghasilkan torsi maksimal pada RPM rendah dan
secara bertahap akan menurun seiring meningkatnya RPM motor. keunggulan BLDC motor
dibandingkan jenis Brushed DC motor lainnya diantaranya efisiensi kerja yang lebih tinggi,
tingkat keausan atau mechanical wear rendah karena tidak menggunakan brush, dan frekuensi
perawatan yang minimal.
Konstruksi beberapa BLDC motor menggunakan permanent magnet dibagian yang
berputar rotor dan armature pada bagian stator. Sistem sequencing arus listrik menggunakan
electronic controller sebagai sistem pengganti komutator dengan brushed pada motor DC
konvensional. Electronic controller ini mengubah fasa arus listrik yang menuju gulungan kawat
untuk mendistribusikan daya listrik sehingga dapat menjaga perputaran motor agar tetap konstan.
Dengan cara ini didapatkan beberapa keuntungan yaitu meminimalkan energy losses dan
menghilangkan mechanical wear antara bagian stator dan rotor.
Keunggulan BLDC motor dibandingkan dengan DC motor konvensional antara lain
torque per weight dan per watt lebih besar, peningkatan efisiensi dan reliability, pengurangan
noise atau kebisingan suara, mengeliminasi percikan ion electron dari komutator dan
mengeliminasi electromagnetic interference (EMI).
Daya maksimum yang dapat diberikan pada BLDC motor dibatasi hampir hanya oleh
energi panas atau heat yang dapat melemahkan kekuatan magnet atau merusak selubung insulasi
nya. Kekurangan utama BLDC motor yaitu harganya yang lebih mahal. Hal ini terjadi karena
sistem komutasi motor ini membutuhkan kontrol kecepatan elektronik yang kompleks sementara
brushed DC motor atau motor DC konvensional dapat menggunakan sistem rheostat (variable
rsisitor) yang sangat sederhana untuk bekerja. Selain itu, sistem produksi BLDC motor secara
komersil masih menggunakan proses manual penggulungan kawat secara manual dibandingkan
penggulungan mesin.
BLDC motor memiliki efisiensi yang lebih tinggi untuk mengkonversi daya listrik dari
sumber energi menjadi daya mekanis untuk menggerakan motor. Peningkatan efisiensi ini dapat
tercapai karena tidak adanya electrical dan friction losses yang disebabkan oleh komponen
brushed. Efisiensi maksimal terjadi pada daerah tanpa beban atau no-load dan low-load pada
performance curve dari motor. Sementara pada beban mekanis yang sangat tinggi, efisiensi
BLDC motor dapat setara dengan high-quality DC Brushed motor.
Aplikasi BLDC motor umumnya digunakan pada sistem yang membutuhkan kecepatan
tinggi dan bebas perawatan serta kondisi lingkungan yang melarang adanya percikan listrik
seperti pertambangan atau kondisi dimana adanya peralatan elektronik yang sensitif.
2.2.3 BLDC Hub Motor
Perkembangan teknologi BLDC motor serta berbagai keunggulanya dibandingkan jenis
motor lain membuat aplikasi jenis motor ini menjadi semakin luas. Di sektor transfortasi
khususnya, tidak hanya sepeda listrik yang memanfaatkan keunggulan motor ini namun juga
scooter, solar cars dan banyak mobil listrik.
Untuk aplikasi penggunaan pada sektor transportasi, modifikasi banyak dilakukan pada
perkembanganya dan kini muncul tipe konstriuksi baru dari motor BLDC motor yaitu BLDC
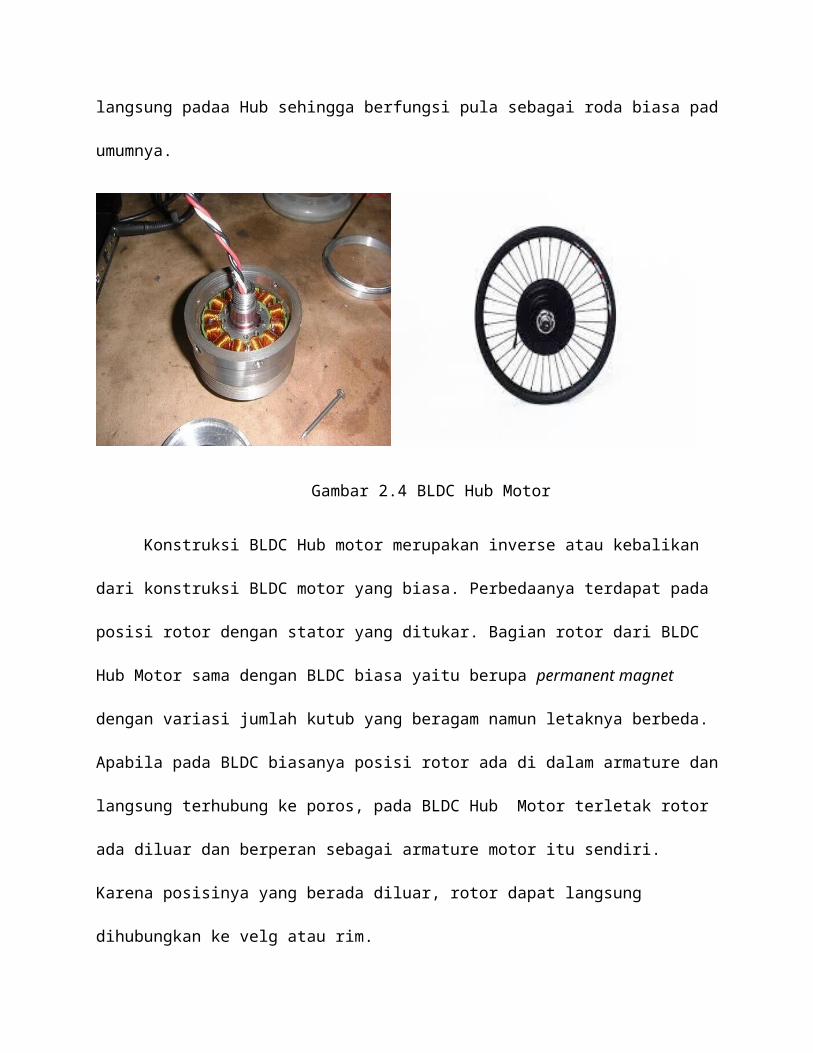
Hub Motor. sesuai dengan namnya BLDC Hub motor digunakan dan dipasang langsung padaa
Hub sehingga berfungsi pula sebagai roda biasa pad umumnya.
Gambar 2.4 BLDC Hub Motor
Konstruksi BLDC Hub motor merupakan inverse atau kebalikan dari konstruksi BLDC
motor yang biasa. Perbedaanya terdapat pada posisi rotor dengan stator yang ditukar. Bagian
rotor dari BLDC Hub Motor sama dengan BLDC biasa yaitu berupa permanent magnet dengan
variasi jumlah kutub yang beragam namun letaknya berbeda. Apabila pada BLDC biasanya
posisi rotor ada di dalam armature dan langsung terhubung ke poros, pada BLDC Hub Motor
terletak rotor ada diluar dan berperan sebagai armature motor itu sendiri. Karena posisinya yang
berada diluar, rotor dapat langsung dihubungkan ke velg atau rim.
Ada dua jenis tipe BLDC Hub Motor secara umum yaitu Hub motor dengan dan tanpa
gear. BLDC Hub Motor dengan gear biasanya menggunakan susunan planetary gear sebagai
sistem transmisi dari motor menuju hub. Sementara BLDC hub Motor tanpa gear di hubungkan
langsung.
Gambar 2.5 Konstruksi rotor dan stator BLDC Hub Motor tanpa Gear
(Sumber: http:www.ebikes.ca/hubmotors.shtml)
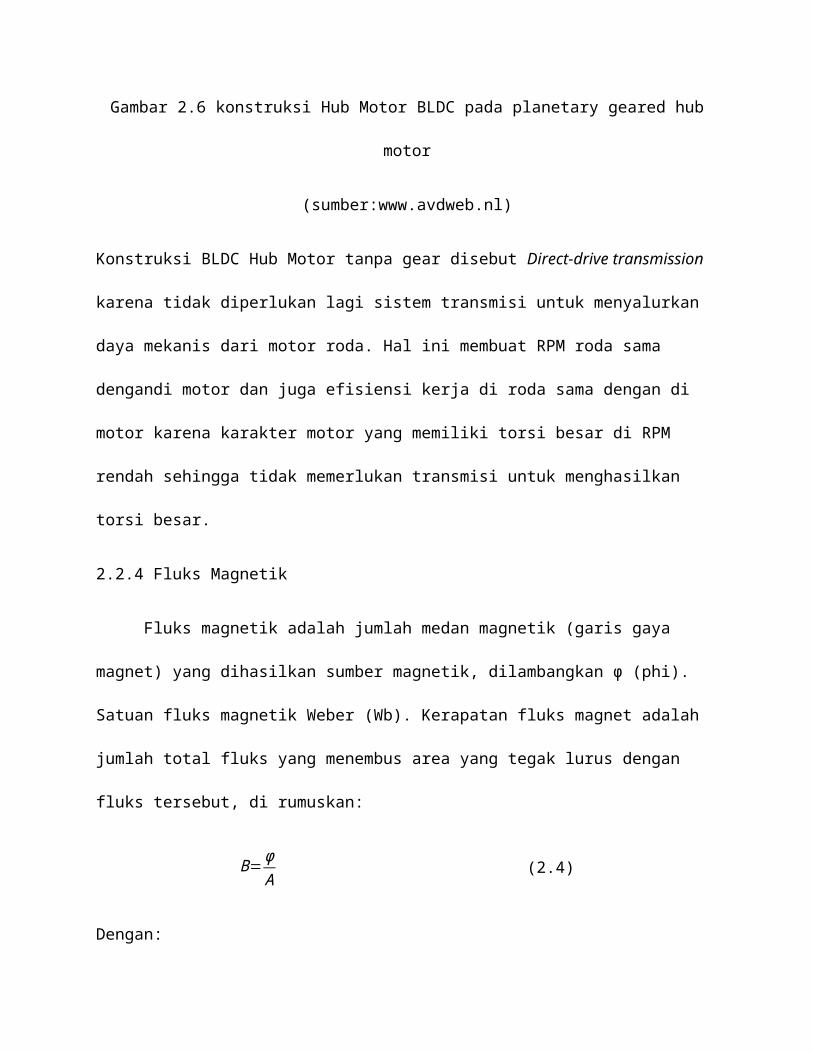
Gambar 2.6 konstruksi Hub Motor BLDC pada planetary geared hub motor
(sumber:www.avdweb.nl)
Konstruksi BLDC Hub Motor tanpa gear disebut Direct-drive transmission karena tidak
diperlukan lagi sistem transmisi untuk menyalurkan daya mekanis dari motor roda. Hal ini
membuat RPM roda sama dengandi motor dan juga efisiensi kerja di roda sama dengan di motor
karena karakter motor yang memiliki torsi besar di RPM rendah sehingga tidak memerlukan
transmisi untuk menghasilkan torsi besar.
2.2.4 Fluks Magnetik
Fluks magnetik adalah jumlah medan magnetik (garis gaya magnet) yang dihasilkan
sumber magnetik, dilambangkan φ (phi). Satuan fluks magnetik Weber (Wb). Kerapatan fluks
magnet adalah jumlah total fluks yang menembus area yang tegak lurus dengan fluks tersebut, di
rumuskan:
B= φA (2.4)
Dengan:
B = Rapat fluks magnet (T atau Wbm2 )
Φ = Fluks magnet (Wb)
A = Luas penampang (m2)
BAB III
PERANCANGAN
3.1 Alur Penelitian
Pada Bab ini dibahas alur dari penelitian perancangan BLDC Motor 10 KW, yang
diterapkan pada roda sepeda motor dengan ukuran 17 inci. Diagram alur penelitian ditunjukkan
pada gambar 3.1.

Gambar 3.2 Diagram alir perancangan BLDC motor
Perancangan motor listrik BLDC 10 KW di mulai dengan menentukan parameter
spesifikasi motor dari daya, arus, tegangan yang telah di prakiraan dan kemudian menghitung
kecepatan motor, diameter kawat, jumlah lilitan dan torsi motor. setelah mengetahui hasil
prakiraan perhitungan motor listrik BLDC tersebut kemudian menentukan ukuran rotor dan
stator pada motor listrik BLDC, dari hasil prakiraan perhitungan tersebut dapat diketahui
seberapa besar ukuran motor listrik BLDC yang akan diterapkan pada ring 17 inci sepeda motor.
3.2 Peralatan dan bahan
1. Menggunakan Softwere Solidworks yang digunakan untuk merancang komponen utama
motor listrik stator dan rotor.
2. Perancangan motor BLDC dengan daya 10 KW
3.3 Perancangan Model
Pada perancangan motor listrik BLDC 10 KW ini meliputi komponen utama dari motor
listrik yakni perancangan stator dan perancangan rotor. BLDC motor 10 KW yang dirancang
dengan kecepatan 1500 RPM, tegangan 120 Vdc, magnet Neodymium dan penentuan bentuk
rotor yang ditentukan dari besarnya diameter kawat lilitan pada tiap-tiap kumparan yang
terpasang pada stator.
3.2.1 Perancangan Rotor motor listrik BLDC
1. Menghitung jumlah pole magnet
Dengan mengasumsikan kecepatan motor maka jumlah pole dapat di ketahui
dengan rumus n=120. fp
2. Menentukan magnet yang digunakan
Jenis magnet yang digunakan Neodymium batang panjang 50 mm, lebar 15 mm
dan tebal 6 mm
Kerapatan fluks magnet N50 B = 1.425 Tesla
Menentukan fluks magnet ϕ=BxA
3.2.2 Perancangan stator motor listrik BLDC
1. Jumlah fasa yang digunakan yakni 3 fasa
2. Menentukan jumlah kumparan
Rumus perhitungan jumlah kumparan 3 fasa N s=Px N ph
2 , dengan rumus tersebut
maka dapat di ketahui jumlah kumparan pada motor listrik.
Pada tiap kumparan akan di beri lilitan oleh kawat email yang besar kawat
tersebut ditentukan oleh besarnya arus yang akan melewati kawat, semakin besar
arus maka kawat tersebut akan semakin besar.
3. Menentukan jumlah kawat lilitan
Karena jumlah kawat lilitan dan diameter kawat akan berpengaruh terhadap
diameter rotor maka untuk menghitung jumlah lilitan kawan dapat menggunakan
rumus N= E2 πFϕ N s/nph




















