Bab8 aljabar linier

of 13
description
aljabar linier
Transcript of Bab8 aljabar linier
-
1
8. TRANSFORMASI LINIER
8.1. TRANSFORMASI LINIER UMUM
Definisi:
Jika T : V W adalah suatu fungsi dari suatu ruang vektor V ke ruang vektor W, maka
T disebut transformasi linier dari V ke W jika untuk semua vektor
u dan
v di V dan
semua skalar c berlaku:
a. T(
u +
v ) = T(
u ) + T(
v )
b. T( c
u ) = c T(
u )
Jika V = W, maka T : V V disebut operator linier.
Contoh:
1. Buktikan bahwa pemetaan T : V W T(
v ) = 0 untuk
v V adalah
transformasi linier , dimana V dan W adalah ruang vektor. T dalam hal ini disebut
trnasformasi nol.
2. Misalkan V adalah ruang vektor. Pemetaan I : V V dengan I (
v ) =
v adalah
operator linier. Buktikan!
3. Misalkan V adalah ruang vektor dan k skalar. Buktikan bahwa pemetaan
T : V V dengan T(
v ) = k
v adalah operator linier.
4. T adalah proyeksi ortogonal dari V pada W, dimana W adalah subruang
berdimensi hingga dari V, T(
v ) =
vproyW . Apakah T merupakan
transformasi linier?
5. Misalkan
p = p(x) = c0 + c1x + c2x2 + ... + cnx
n adalah polinom di Pn. Buktikan
T : Pn Pn dengan T (
p ) = T(p(x)) = p(ax+b) = c0 + c1 (ax+b) + c2 (ax+b)2 + ...
+ cn (ax +b)n adalah operator linier.
6. Misalkan T : Mnn R, dengan T(A) = det(A). Mnn adalah himpunan matriks
berukuran n x n dan R adalah himpunan bilangan riil. Apakah T merupakan
transformasi linier?
-
2
Secara sederhana, jika nvvv
,...,, 21 adalah vektor-vektor di V dan c1, c2, ...,cn adalah
skalar-skalar, maka untuk membuktikan transformasi linier dapat dilakukan dengan
membuktikan bahwa T( )(...)()()... 22112211 nnnn vTcvTcvTcvcvcvc
Teorema 8.1.1
Jika T : V W adalah transformasi linier, maka:
a. T(
0 ) =
0
b. T(-
v ) = - T(
v ),
v V.
c. T(
v -
w ) = T(
v ) T(
w ),
v ,
w V.
Jika T : V W adalah transformasi linier dan jika { nvvv
,...,, 21 }adalah sebarang basis
untuk V, maka bayangan T(
v ) dari sebarang vektor
v V dapat dihitung dari bayangan-
bayangan vektor-vektor basis, yaitu T( 1
v ),T( 2
v ), ..., T( nv
).
Caranya adalah:
1. Nyatakan
v sebagai kombinasi linier dari vektor-vektor basis, yaitu
v = nn vcvcvc
...2211
2. T(
v ) = T( nn vcvcvc
...2211 )
= )(...)()( 2211 nn vTcvTcvTc
Jadi, suatu transformasi linier ditentukan secara lengkap oleh bayangan-bayangan vektor
vektor basis.
Contoh:
Misalkan basis S = { 321 ,,
vvv } basis di R3, dimana 1
v = (1,1,1), 2
v = (1,1,0) dan
3
v = (1,0,0). T : R3
R3 operator linier T( 1
v ) = (2, -1,4), T( 2
v ) = (3,0,1) dan
T(3
v
) = (-1, 5,1). Cari formula untuk T(x1,x2,x3) dan kemudian hitung T(2,4,-1)!
-
3
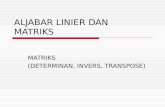
Definisi :
Jika T1 : UV dan T2 : VW adalah transformasi linier, komposisi dari T2 dengan T1
dinotasikan dengan T2 T1 adalah fungsi dengan formula (T2 T1)(
u ) = T2 (T1(
u )),
dimana
u U. Perhatikan gambar 1 !
Gambar1
Teorema 8.1.2
Jika T1 : UV dan T2 : VW adalah transformasi linier, maka (T2 T1) : UW juga
transformasi linier.
Catatan : Komposisi transformasi linier dapat juga didefinisikan untuk lebih dari dua
transformasi linier.
8.2. KERNEL DAN RANGE
Definisi :
Jika T : V W adalah transformasi linier, Kernel dari T (ker(T)) adalah himpunan
semua vektor-vektor di V yang dipetakan ke
0 . Range dari T (R(T)) adalah himpunan
semua vektor di W yang merupakan bayangan oleh T dari paling sedikit satu vektor di V.
Contoh :
1. TA : Rn R
m adalah perkalian oleh matriks Amxn, atau AX = b.
Ker(TA) = nullspace (ruang nol) dari A
R(TA) = ruang kolom dari A
2. T : V W adalah transformasi nol
Ker(T) = V dan R(T) = {
0 }
3. I : V V adalah operator identitas
Ker(T) = {
0 }dan R(T) = V
-
4
4. T : V V dengan T(
v ) = 3
v
Ker(T) = dan R(T) =
5. T : R2 R2, dengan T(x,y) = (2x - y, -8x + 4y)
Ker(T) = dan R(T) =
Teorema 8.2.1
Jika T : V W adalah transformasi linier, maka
a. Kernel dari T (ker(T)) adalah subruang dari V
b. Range dari T (R(T)) adalah subruang dari W
Definisi :
Jika T : V W adalah transformasi linier, maka dimensi dari range T disebut rank dari
T atau rank(T), dimensi dari kernel T disebut nullitas dari T atau nullitas (T).
Teorema 8.2.2
Jika A adalah matriks mxn dan TA : Rn
Rm
adalah perkalian oleh matriks Amxn, maka
a. nullitas(TA) = nullitas dari A
b. rank(TA) = rank (A)
Teorema 8.2.3
Jika T : V W adalah transformasi linier dari ruang vektor V berdimensi n ke ruang
vektor W, maka rank(T) + nullitas (T) = n.
8.3 INVERS TRANSFORMASI LINIER
Definisi :
Suatu transformasi linier T : V W disebut satu-satu jika T memetakan setiap vektor
yang berbeda di V ke vektor yang berbeda di W.
Contoh :
1. TA : Rn
Rn adalah perkalian dengan matriks A
TA satu-satu jika dan hanya jika A invertible ( teorema 4.3.1)
Untuk nomor 2-4, tentukan apakah T satu-satu ?
-
5
2. T : Pn Pn+1 , dengan T(
p ) = T(p(x)) = xp(x),
3. T : R2 R2, T(x,y) = (x + y, x - y)
4. T : R2 R2, T(x,y) = (0, 2x +3y)
Teorema 8.3.1
Jika T : V W adalah transformasi linier, maka yang berikut ekivalen
a. T satu-satu
b. Ker(T) = {
0 }
c. Nullitas (T) = 0
d. ika W = V maka R(T) = V
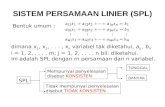
Jika T : V W adalah transformasi linier dan satu-satu maka ada invers dari T, yaitu T-1
.
Jika T memetakan
v V ke
w = T(
v )W maka T-1
memetakan
w = T(
v )W
ke
v V .
Perhatikan gambar 2 :
T-1
(T(
v )) = T-1
(
w ) =
v
T (T-1
(
w )) = T(
v ) =
w
Domain dari T-1
adalah range dari T atau R(T).
Gambar2
Contoh :
T : R3
R3, apakah T mempunyai invers ? Jika ya, cari T
-1 !
1. T(x1,x2,x3) = (x1+5x2+2x3, x1+2x2+x3, -x1+x2)
2. T(x1,x2,x3) = (x1+4x2-x3, x1+2x2+x3, -x1+x2)
-
6
T(
x )
x
T
Vektor di V
Vektor di Rn
[(T(
x )]B
A Vektor
di Rm
Vektor
di W
[
x ]B
Teorema 8.3.3
Jika T1 : UV dan T2 : VW adalah transformasi linier satu-satu, maka
a. (T2 T1) satu-satu
b. (T2 T1) -1
= T1-1
T2-1
Secara umum,
( Tn Tn-1. T2T1 )-1
= T1-1
T2-1
Tn-1-1
Tn-1
8.4. MATRIKS DAN TRANSFORMASI LINIER
Misalkan: V ruang vektor berdimensi n, B merupakan basis V
W ruang vektor berdimensi m, B merupakan basis W
T : VW
Perhatikan bagan berikut !
A[
x ]B = [T(
x )]B
A disebut matriks untuk T relatif terhadap basis B dan B.
Bagaimana bentuk A?
Misalkan B ={ nuuu
,...,, 21 }, B = { },...,, 21 mvvv
.
Akan dicari A =
mnmm
n
n
aaa
aaa
aaa
21
22221
11211
sedemikian hingga A[
x ]B = [T(
x )]B,
x V.
Sehingga persamaan A[
x ]B = [T(
x )]B juga berlaku untuk nuuu
,...,, 21 V.
-
7
Berarti A[ 1
u ]B = [T( 1
u )]B
A[ 2
u ]B = [T( 2
u )]B
A[ nu
]B = [T( nu
)]B
Tetapi
[ 1
u ]B =
0
0
1
, [ 2
u ]B =
0
1
0
dan [ nu
]B =
1
0
0
sehingga
A[ 1
u ]B =
mnmm
n
n
aaa
aaa
aaa
21
22221
11211
0
0
1
=
1
21
11
ma
a
a
= [T( 1
u )]B
A[ 2
u ]B =
2
22
12
ma
a
a
= [T( 2
u )]B , , A[ nu
]B =
mn
n
n
a
a
a
2
1
= [T( nu
)]B
Berarti, A =
''2'1 )]([||)]([|)]([ BnBB uTuTuT = [T]B,B
Jadi matriks untuk T relatif terhadap basis B dan B adalah [T]B,B dengan sifat :
[T]B,B[
x ]B = [T(
x )]B
Jika T : VV operator linier dengan basis B = { nuuu
,...,, 21 }, maka matriks T relatif
terhadap basis B adalah
[T]B =
BnBB uTuTuT )]([||)]([|)]([ 21
dengan sifat
[T]B[
x ]B = [T(
x )]B
-
8
Teorema 8.4.1
Jika T : Rn
Rm
adalah transformasi linier dan jika B dan B adalah basis standar untuk
Rn
dan Rm
, maka
[T]B,B = [T]
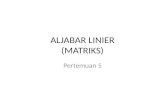
Untuk
x Rn, maka [T]
x = T(
x )
T : V W adalah transformasi linier. Untuk mencari T(
x ) perhatikan gambar 3.
Gambar 3
Langkah-langkah mencari T(
x )
I. Cara Langsung
II. Cara tidak langsung :
1. Cari matriks koordinat [
x ]B
2. Kalikan [
x ]B dengan [T]B,B dari kiri, diperoleh [T(
x )]B
3. Berdasarkan [T(
x )]B, cari T(
x )
Contoh :
1. T : P2 P3 adalah transformasi linier dengan T(p(x)) = x p(x)
a. Cari matriks untuk T relatif terhadap basis standar B = { 321 ,,
uuu }dan
B={ },,, 4321
vvvv , dimana 1
u = 1, 2
u = x , 3
u = x2 ; 1
v = 1, 2
v = x, 3
v =
x2 dan 4
v = x3.
Jawab :
-
9
[T]B,B =
''2'1 )]([|)]([|)]([ BnBB uTuTuT
T( 1
u ) = T(1) = x, T( 2
u ) = T(x) = x2 dan T( 3
u ) = T(x2) = x
3
[T( 1
u )]B =
0
0
1
0
, [T( 2
u )]B =
0
1
0
0
dan [T( 3
u )]B =
1
0
0
0
sehingga
[T]B,B =
100
010
001
000
.
b. Hitung dengan cara tidak langsung T(2+x+2x2)
Misalkan
p = p(x) = 2+x+2x2
[
p ]B =
2
1
2
, [T]B,B[
p ]B = [T(
p )]B
[T(
p )]B =
100
010
001
000
2
1
2
=
2
1
2
0
[T(
p )] = 0 + 2x + x2
+ 2x3 = 2x + x
2 + 2x
3
c. Hitung dengan cara langsung
[T(
p )] = T(2+x+2x2) = x(2+x+2x
2) = 2x+x
2+2x
3
2. T : R2 R3, dengan T
2
1
x
x=
0
2
1
21
x
xx
a. Cari matriks [T]B,B, dengan B = { 21 ,
uu } dan B = { },, 321
vvv dengan
-
10
1
u =
3
1, 2
u =
4
2, 1
v =
1
1
1
, 2
v =
0
2
2
dan 3
v =
0
0
3
b. Apakah memenuhi formula [T]B,B[
x ]B = [T(
x )]B ,
x R2 ?
8.5. SIMILARITAS
Misalkan T : R2
R2, dengan T
2
1
x
x=
21
21
42 xx
xx.
Jika B basis standar atau B = { 21 ,
ee }maka matriks untuk T yang bersesuaian
dengan basis B adalah [T]B =
BB eTeT )]([|)]([ 21 =
42
11
Jika B = { 21 ,
uu } bukan basis standar, dimana 1
u =
1
1, 2
u =
2
1, maka matriks
untuk T yang bersesuaian dengan basis B adalah
[T]B =
'2'1 )]([|)]([ BB uTuT =
30
02
Teorema 8.5.1
Jika B dan B adalah basis untuk ruang vektor V berdimensi hingga dan jika I : V V
adalah operator identitas, maka [I]B,B adalah matriks transisi dari B ke B
Gambar 4
Permasalahan
1. Bagaimana cara mendapatkan matriks untuk T dalam bentuk yang paling
sederhana ?
Pilih basis untuk V yang membuat matriks untuk T sesederhana mungkin, yaitu
pertama cari matriks untuk T yang bersesuaian dengan sebarang basis, misal basis
-
11
standar. Kemudian basis tersebut diubah sedemikian hingga matriks untuk T
menjadi lebih sederhana.
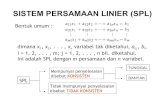
2. Jika B dan B adalah basis untuk ruang vektor berdimensi hingga V dan
T: V V adalah operator linier, apa hubungan antara [T]B dengan [T]B ?
Perhatikan gambar 5!
Gambar 5
T = I T I
[T]B ,B = [IT I] B ,B = [I]B ,B [T]B, B[I]B,B atau
[T]B = [I]B ,B [T]B[I]B,B
Misalkan P adalah matriks transisi dari B ke B atau P = [I]B,B, maka [I]B ,B = matrik
transisi dari B ke B = P-1
. Jadi,
[T]B = P-1
[T]B P
Contoh:
1. Misalkan T : R2 R2 dengan T
2
1
x
x=
21
21
42 xx
xxdengan basis standar .
Maka [T]B =
42
11.
Misalkan B={ ',' 21
uu } dengan 1
u =
1
1, 2
u =
2
1, maka matriks transisi dari B
ke B = P adalah P =
BB uu ]'[|]'[ 21 =
21
11dan P
-1 =
11
12
Sehingga [T]B = P-1
[T]B P =
11
12
42
11
21
11=
30
02.
-
12
2. Misalkan T : R2 R2 dengan T
2
1
x
x=
21
21
42 xx
xx. Cari sebuah basis untuk R
2
sedemikian hingga matriks untuk T diagonal !
Definisi :
Jika A dan B adalah matriks bujur sangkar, B dikatakan similar dengan A jika terdapat
matriks P yang invertibel sedemikian hingga B = P-1
AP.
Definisi :
Suatu sifat dari matriks bujur sangkar disebut similarity invariant atau invarian di bawah
similaritas jika sifat tersebut dimiliki oleh dua matriks yang similar.
Tabel 1. Similarity invariant :
1.Determinan A dan P-1
AP mempunyai determinan yang sama
2. Invertibility A invertible jika dan hanya jika P-1
AP invertible
3.Rank A dan P-1
AP mempunyai rank yang sama
4. Nullitas A dan P-1
AP mempunyai nullitas yang sama
5. Trace A dan P-1
AP mempunyai trace yang sama
6. Polinomial karakteristik A dan P-1
AP mempunyai polinomial karakteristik
yang sama
7. Nilai eigen A dan P-1
AP mempunyai nilai eigen yang sama
8. Dimensi ruang eigen Jika nilai eigen dari A dan P-1AP, maka ruang
eigen dari A yang berkaitan dengan dan nilai
eigen dari P-1
AP yang berkaitan dengan
mempunyai dimensi yang sama.
Nilai Eigen dari Operator Linier
Misalkan T: V V adalah operator linier. Misalkan (ada)
x 0 V T
x =
x ,
maka:
disebut nilai eigen dari T
x adalah vektor eigen untuk T yang bersesuaian dengan .
Ker ( I T) = ruang eigen dari T yang bersesuaian dengan .
-
13
Sifat :
Jika B sebarang basis untuk ruang vektor V, maka:
1. Nilai-nilai eigen dari T = nilai-nilai eigen dari [T]B
2. Vektor
x adalah vektor eigen dari T jika dan hanya jika vektor [
x ]B adalah
vektor eigen dari [T]B.
Soal-soal:
1. Misalkan T : R2 R2 pemetaan dengan T(x,y) = (2x-y, -8x +4y).
a. Apakah T satu-satu ? Jelaskan!
b. Apakah ( -3,11) anggota dari range T? Jelaskan !
c. Apakah (1,2) anggota kernel T ? Jelaskan !
d. Cari matriks transformasinya
e. Perlihatkan bahwa setiap titik pada bidang xy dipetakan ke garis y = 4
1x.
2. B = {(1,2), (2,3)} dan B = {(1,3),(1,4)} adalah basis-basis untuk R2. Jika
T : R2
R2 pemetaan dengan T(x,y) = (2x-3y, x + y), carilah :
a. Matriks standar dari T
b. Matriks transformasi [T]B
c. Matriks transformasi [T]B
d. Tunjukkan bahwa [T]B dan [T]B similar.
3. T1 : P1 P2 transformasi linier sehingga T1(p(x)) = xp(x).
T2 : P2 P2 sehingga T2(p(x)) = p(2x+1)
B = {1,x} adalah basis P1 dan B = {1,x,x2} adalah basis P2.
a. Tunjukkan bahwa T2 adalah operator linier
b. Carilah [T2]B, [T1]B,B dan [T2T1]B,B