BAB III PEMBAHASAN 3.1. Tinjauan Umum Alat
13
33 BAB III PEMBAHASAN 3.1. Tinjauan Umum Alat Alat pendeteksi dan penyortir kualitas telur dengan sensor LDR berbasis Arduino bertujuan untuk membantu efisiensi pembuatan telur asin pada proses candling telur, dimana secara konvensional proses ini dilakukan dengan meneropong telur menggunakan senter kemudian diamati dengan mata. Alat ini bekerja berdasarkan prosedur konvensional yang kemudian dirancang menjadi sebuah alat tepat guna yang bisa secara otomatis mendeteksi serta menyortir kualitas telur. Telur bergerak masuk dan dilakukan pendeteksian saat berada diantara sumber cahaya dari LED dan sensor LDR. Proses pengamatan digantikan dengan menggunakan sensor LDR yang mengukur seberapa cahaya yang tembus melalui telur. Intensitas cahaya Dengan metode fuzzy logic telur akan diklasifikasikan kualitasnya dan ditampikan pada display LED. Selanjutnya telur akan disortir berdasarkan kualitasnya dan diarahkan pada wadah. 3.2. Blok Diagram alat Konsep dasar dari alat pendeteksi dan penyortir kualitas telur dengan sensor ldr berbasis Arduino terbagi menjadi 3 blok meliputi blok input sebagai sumber data, blok proses yang menangani pemrosesan data yang didapat dari input, dan blok output yang menampilkan informasi kualitas telur serta melakukan penyortiran.
Transcript of BAB III PEMBAHASAN 3.1. Tinjauan Umum Alat
33
BAB III
PEMBAHASAN
3.1. Tinjauan Umum Alat
Alat pendeteksi dan penyortir kualitas telur dengan sensor LDR
berbasis Arduino bertujuan untuk membantu efisiensi pembuatan telur asin
pada proses candling telur, dimana secara konvensional proses ini dilakukan
dengan meneropong telur menggunakan senter kemudian diamati dengan mata.
Alat ini bekerja berdasarkan prosedur konvensional yang kemudian dirancang
menjadi sebuah alat tepat guna yang bisa secara otomatis mendeteksi serta
menyortir kualitas telur.
Telur bergerak masuk dan dilakukan pendeteksian saat berada diantara
sumber cahaya dari LED dan sensor LDR. Proses pengamatan digantikan
dengan menggunakan sensor LDR yang mengukur seberapa cahaya yang
tembus melalui telur. Intensitas cahaya Dengan metode fuzzy logic telur akan
diklasifikasikan kualitasnya dan ditampikan pada display LED. Selanjutnya
telur akan disortir berdasarkan kualitasnya dan diarahkan pada wadah.
3.2. Blok Diagram alat
Konsep dasar dari alat pendeteksi dan penyortir kualitas telur dengan
sensor ldr berbasis Arduino terbagi menjadi 3 blok meliputi blok input sebagai
sumber data, blok proses yang menangani pemrosesan data yang didapat dari
input, dan blok output yang menampilkan informasi kualitas telur serta
melakukan penyortiran.

34
34
Gambar III.1
Blok diagram alat
Pada blok input dilakukan penyinaran telur bebek menggunakan LED
sebagai sumber cahaya. Intensitas cahaya yang menembus telur diukur
menggunakan sensor LDR untuk dijadikan data sumber pendeteksi dan
penyortiran.
Pada blok proses data yang didapat dari blok sensor akan diolah
menggunakan metode fuzzy logic dimana pada telur bebek yang digunakan
untuk pembuatan telur asin disebut berkualitas saat telur tidak terdapat embrio
bebek, sehingga dinyatakan baik saat intensitas cahaya yang tembus melalui
telur lebih tinggi. Berdasarkan logika tersebut dilakukan perintah pada
komponen yang berada di blok output.
Pada blok output terdiri dari dua bagian, bagian pertama menampikan
info kualitas telur pada LCD 16x2 dalam bentuk teks. Bagian kedua adalah
bagian penyortiran, disini digunakan motor servo yang bertugas mengarahkan
telur bebek hasil uji ke salah satu dari dua wadah sesuai dengan kualitas telur
35
35
bebek hasil uji dimana satu wadah untuk telur bebek kualitas baik dan satu
wadah lagi untuk telur bebek dengan kualitas buruk.
3.2. Skema rangkaian
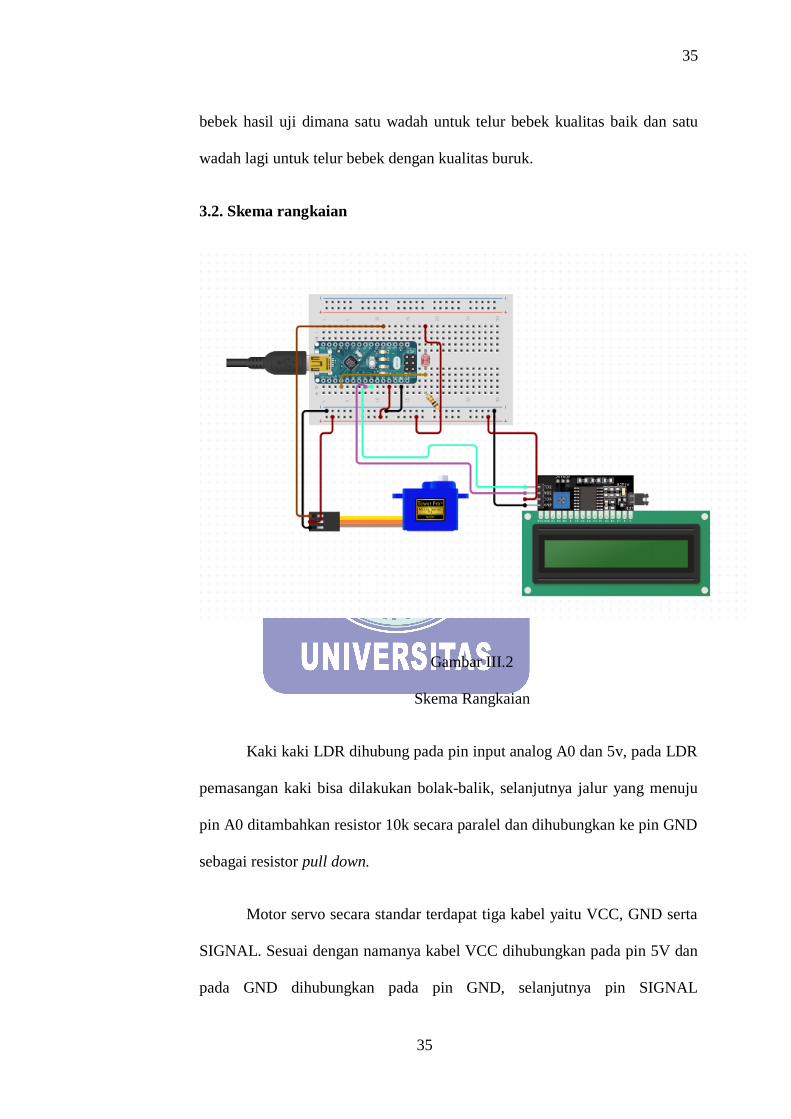
Gambar III.2
Skema Rangkaian
Kaki kaki LDR dihubung pada pin input analog A0 dan 5v, pada LDR
pemasangan kaki bisa dilakukan bolak-balik, selanjutnya jalur yang menuju
pin A0 ditambahkan resistor 10k secara paralel dan dihubungkan ke pin GND
sebagai resistor pull down.
Motor servo secara standar terdapat tiga kabel yaitu VCC, GND serta
SIGNAL. Sesuai dengan namanya kabel VCC dihubungkan pada pin 5V dan
pada GND dihubungkan pada pin GND, selanjutnya pin SIGNAL

36
36
dihubungkan pada pin digital D2. Pin digital bertugas mengirim sinyal digital
1 atau 0 yang dihasilkan mikrokontroler yang selanjutnya diterjemahkan motor
servo dengan mengatur derajat perputarannya.
Pin yang terdapat pada LCD 16x2 terdiri dari 16 pin, hal ini tentu
kurang efisien jika semua pin yang terdapat pada LCD 16x2 dihubungkan
langsung dengan pin-pin yang terdapat pada Arduino Nano 328p. Untuk
menyederhanakan jumlah pin yang terhubung antara LCD 16x2 dan Arduino
Nano 328p digunakan modul I2C dan cukup menghubungkan 2 pin untuk
mengendalikan LCD 16x2 dan pin VCC serta GND sebagai sumber tegangan
untuk menyalakan LCD 16x2. hubungkan pin SDA pada modul I2C dengan
pin analog A4 dan pin SCL dengan pin analog A5.
3.4 Cara kerja Alat
Untuk mengoperasikan alat ini diperlukan tegangan 5V yang
dihubungkan dengan port USB Arduino Nano 328p. Pada perancangan penulis
menggunakan sumber tegangan dari port USB laptop, untuk selanjutnya pada
penerapan penggunaan alat ini oleh pengrajin telur asin digunakan adaptor 5v
yang jamak digunakan untuk charger smartphone bahkan saat berada di tempat
yang tidak terdapat sumber listrik dari PLN bisa digunakan perangkat
powerbank yang banyak dijual di pasaran.
Setelah menyalakan perangkat ini LCD akan menginformasikan
intruksi penggunaan alat untuk membantu pengguna , telur bisa dimasukan
pada bagian input, alat akan secara otomatis berfungsi berdasarkan adanya
telur yang mempengarusi intensitas cahaya. Saat tidak terdapat telur yang diuji,

37
37
cahaya akan langsung mengarah pada LDR, pada kondisi ini motor servo akan
diposisikan posisi netral tanpa mengarahkan telur ke wadah. Telur yang telah
dimasukan pada bagian input secara langsung diproses oleh alat. Jika didapat
telur bebek dengan kondisi baik maka motor servo akan mengarahkan telur ke
jalur wadah telur bebek baik, begitu juga sebaliknya. Jika didapat telur bebek
dengan kondisi busuk maka motor servo akan mengarahkan telur ke jalur
wadah telur bebek busuk.
3.5 Flowchart Program
Gambar III.3
Flowchart program

38
38
3.6 Kontruksi Sistem (Coding)
3.6.1 Inisialisasi
#include <Servo.h> //Library untuk motor servo
#include <LiquidCrystal_I2C.h> //Library untuk LCD 16x2
I2C
Servo penyortir; //Membuat obyek servo
dengan nama penyortir
LiquidCrystal_I2C lcd(0x27,16,2); //Menetapkan alamat untuk LCD
16 karakter 2 baris
int pinSensorLDR = 0; //Pin input untuk sensor LDR
int nilaiSensor; //Membuat variable untuk hasil sensor
int tanpaTelur = 20; //Nilai sensor saat tidak ada
telur
int telurBusuk = 800; //Nilai sensor untuk telur
busuk
void setup() {

39
39
penyortir.attach(2); //Hubungkan servo pada Pin
2 Arduino
lcd.begin(); //Memulai LCD
}
Pada blok kode ini dilakukan inisialisasi library,pin serta setup untuk
komponen yang digunakan. Penjelasan setiap barisnya penulis jelaskan melalui
komentar pada sketch.
3.6.2 Input
nilaiSensor = analogRead(A0); //Baca Nilai sensor LDR
lcd.setCursor (0,0);
lcd.print(nilaiSensor);
Perintah analogRead digunakan untuk melakukan pembacaan nilai dari
sensor LDR yang telah dihubungkan dengan Arduino 328p melalui pin analog
A0. Hasil dari pembacaan sensor ini selanjutnya dijadikan variabel untuk
dilakukan proses pendeteksian. Hasil bacaan sensor ditampilkan pada LCD
bertujuan untuk mendukung percobaan.
Hasil bacaan sensor menghasilkan angka 0 sampai 1023. Berdasarkan
percobaan pengukuran terhadap telur yang telah diketahui kualitasnya dengan
metode candling manual penulis menetapkan variabel tanpaTelur dan
telurBusuk.
3.6.2 Main Program
40
40
if(nilaiSensor< tanpaTelur){
lcd.setCursor (0,1);
lcd.print("MASUKAN TELUR");
penyortir.write(90);
}
else {
if(nilaiSensor< telurBusuk){
lcd.setCursor (0,1);
lcd.print("TELUR BUSUK");
penyortir.write(45);
}
else {
lcd.setCursor (0,1);
lcd.print("TELUR BUSUK");
penyortir.write(135);
};
}
41
41
Pada blok utama ini dilakukan pemrosesan data menggunakan metode
fuzzy logic. Menggunakan fungsi logika dengan membandingkan hasil bacaan
sensor dengan variabel tanpaTelur dan telurBusuk yang telah ditetapkan
sebelumnya.
Pembandingan hasil bacaan sensor dengan variabel tanpaTelur
berfungsi untuk mendeteksi kondisi adanya telur pada tempat pengujian.
Berdasarkan percobaan melakukan pembacaan sensor dengan menyorotkan
sumber cahaya ke LDR secara langsung tanpa adanya penghalang dan saat
terdapat telur bebek dengan kualitas baik. Saat terdeteksi kondisi tidak ada telur
pada media uji LCD akan menampilkan intruksi untuk memasukan telur bebek
dan servo penyortir pada posisi menutup sekat pengarah.
Pembandingan hasil bacaan sensor dengan variabel telurBusuk
berfungsi untuk mendeteksi telur bebek dengan kondisi busuk. Variabel
telurBusuk ditetapkan berdasarkan percobaan pembacaan sensor dengan
menyorotkan sumber cahaya ke telur busuk. Dari hasil pembandingan ini
didapatkan informasi kualitas telur bebek, untuk selanjutnya informasi ini
ditampilkan pada LCD dan memerintah servo penyortir untuk mengarahkan
sekat pengarah ke jalur menuju wadah berdasarkan kualitasnya.
Percobaan untuk penetapan variabel menggunakan sampel telur bebek
yang telah dipastikan kualitasnya dengan metode candling secara
konvensional.
3.7 Hasil Percobaan

42
42
Percobaan dilakukan dengan sample telur bebek yang penulis dapat dari
pengrajin telur asin di lingkungan tempat tinggal penulis. Hasil percobaan
terbilang menggembirakan karena alat dapat bekerja secara baik seperti yang
penulis harapkan. Percobaan dilakukan dengan menggunakan telur yang telah
diketahui kualitasnya dengan menggunakan metode candling secara manual.
Penulis membagi hasil percobaan menjadi 3 bagian meliputi :
1. Hasil Percobaan Input.
Percobaan input dilakukan untuk memastikan sensor berjalan dengan
baik, sampel telur bebek yang diuji diukur nilai sensornya serta mengetahui
nilai sensor saat tidak ada telur bebek dan dengan telur bebek yang telah
diketahui kualitasnya dengan menggunakan metode candling secara manual
dimana penulis sebelumnya menyimpan telur yang tadinya baik selama
beberapa bulan sejak awal penyusunan tugas akhir ini untuk memastikan
kualitas telur menjadi buruk. Nilai sensor berkisar antara 0 hingga 1023 dimana
semakin banyak cahaya yang diterima sensor LDR dari LED sebagai sumber
cahaya makan nilai akan semakin kecil.
Berikut hasil bacaan sensor LDR dengan beberapa sampel telur bebek.
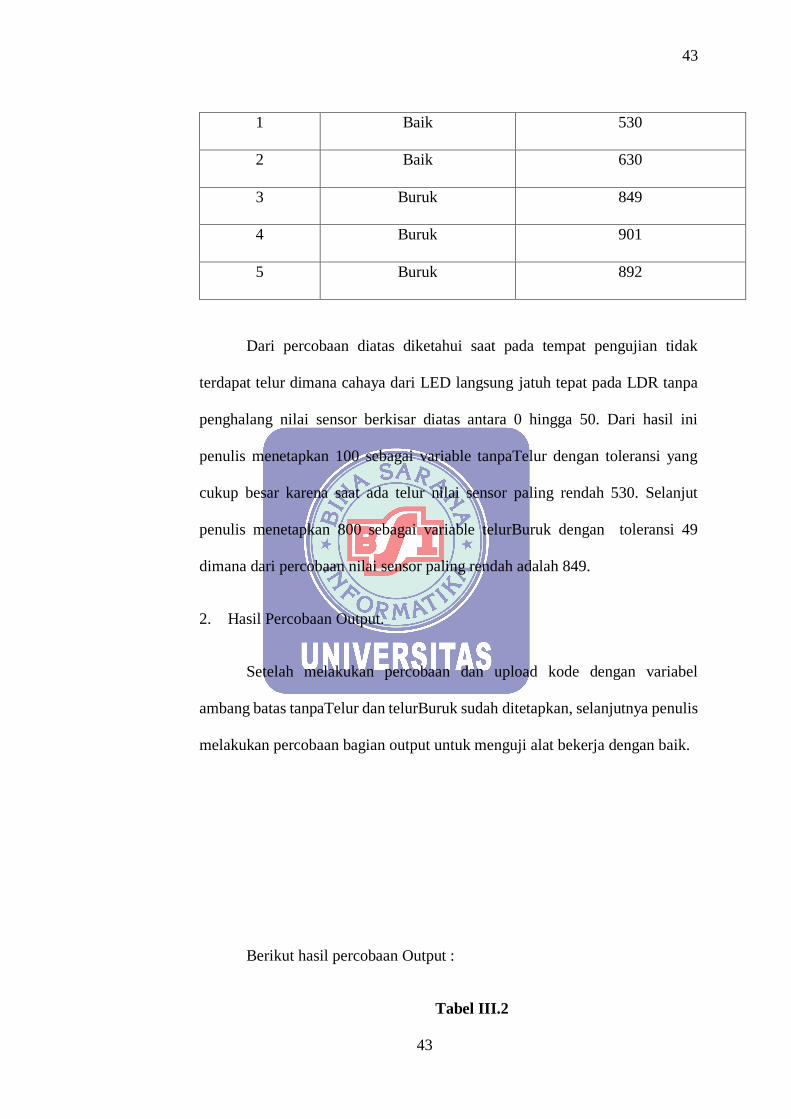
Tabel III.1
Percobaan nilai LDR
Sampel telur Kualitas Nilai Sensor
kosong - 59
43
43
1 Baik 530
2 Baik 630
3 Buruk 849
4 Buruk 901
5 Buruk 892
Dari percobaan diatas diketahui saat pada tempat pengujian tidak
terdapat telur dimana cahaya dari LED langsung jatuh tepat pada LDR tanpa
penghalang nilai sensor berkisar diatas antara 0 hingga 50. Dari hasil ini
penulis menetapkan 100 sebagai variable tanpaTelur dengan toleransi yang
cukup besar karena saat ada telur nilai sensor paling rendah 530. Selanjut
penulis menetapkan 800 sebagai variable telurBuruk dengan toleransi 49
dimana dari percobaan nilai sensor paling rendah adalah 849.
2. Hasil Percobaan Output.
Setelah melakukan percobaan dan upload kode dengan variabel
ambang batas tanpaTelur dan telurBuruk sudah ditetapkan, selanjutnya penulis
melakukan percobaan bagian output untuk menguji alat bekerja dengan baik.
Berikut hasil percobaan Output :
Tabel III.2

44
44
Percobaan tampilan LCD dan arah Servo
Sampel Kualitas LCD Servo
1 Baik Baik Wadah Baik
2 Baik Baik Wadah Baik
3 Baik Buruk Wadah Buruk
4 Buruk Buruk Wadah Buruk
5 Buruk Buruk Wadah Buruk
3. Hasil Percobaan Keseluruhan.
Setelah seluruh rangkaian uji yang dilakukan untuk dalam perancangan
alat ini, selanjutnya penulis melakukan percobaan dengan lebih banyak telur
lagi yang penulis pinjam dari ibu penulis yang berprofesi sebagai pengrajin
telur asin serta penulis jadikan sebagai narasumber dalam penelitian ini. Secara
keseluruhan alat berhasil digunakan dengan baik untuk mendeteksi telur bebek.
Telur sampel menggunakan telur yang tidak digunakan untuk pengujian input
dan output.
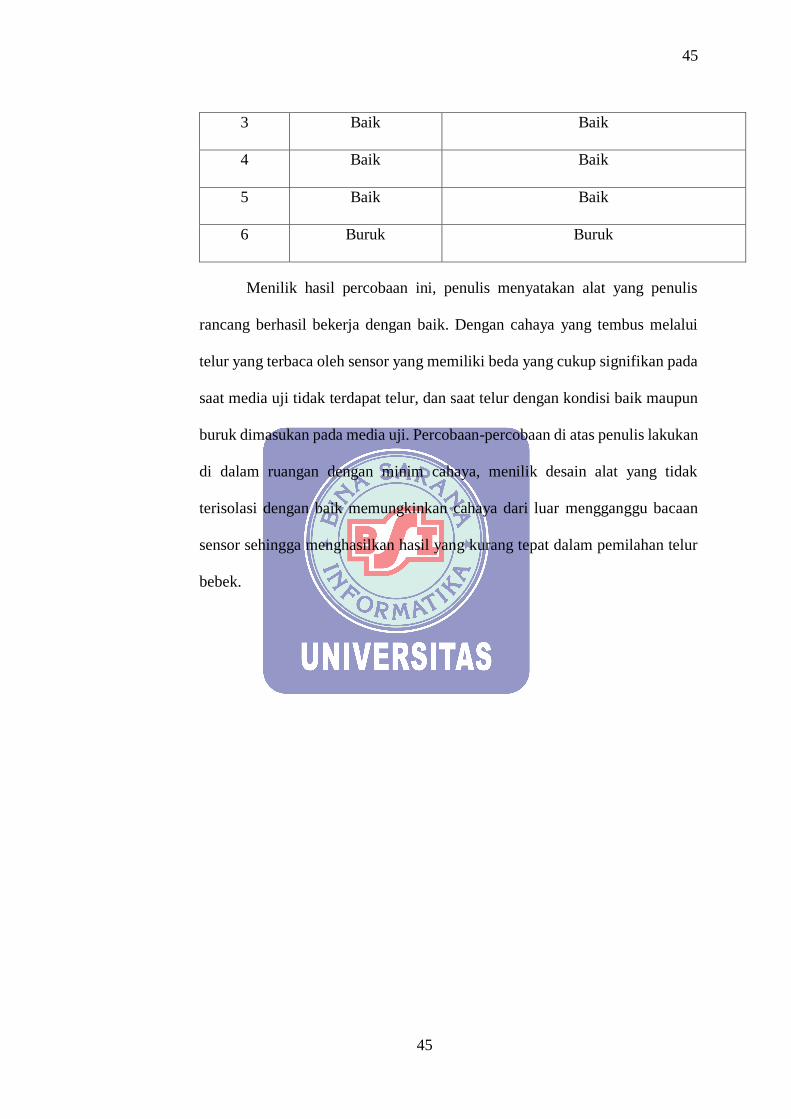
Berikut hasil percobaan keseluruhan :
Tabel III.3
Percobaan Keseluruhan
Sampel Kualitas diketahui Deteksi alat
1 Baik Baik
2 Baik Baik
45
45
3 Baik Baik
4 Baik Baik
5 Baik Baik
6 Buruk Buruk
Menilik hasil percobaan ini, penulis menyatakan alat yang penulis
rancang berhasil bekerja dengan baik. Dengan cahaya yang tembus melalui
telur yang terbaca oleh sensor yang memiliki beda yang cukup signifikan pada
saat media uji tidak terdapat telur, dan saat telur dengan kondisi baik maupun
buruk dimasukan pada media uji. Percobaan-percobaan di atas penulis lakukan
di dalam ruangan dengan minim cahaya, menilik desain alat yang tidak
terisolasi dengan baik memungkinkan cahaya dari luar mengganggu bacaan
sensor sehingga menghasilkan hasil yang kurang tepat dalam pemilahan telur
bebek.