BAB II - UNNOCS | Indonesian electronics for … · Web viewGelombang bunyi mempunyai sifat-sifat...
32
BAB II TINJAUAN PUSTAKA 2.1 Prinsip Dasar Alat ini bekerja dengan cara merekam suara detak jantung janin yang berada dalam kandungan ibu. Sensor yang digunakan berupa Stetoskope dan Mic Condenser. Kemudian suara detak jantung janin diubah menjadi tegangan oleh Mic Condensor, tegangan ini kemudian dikuatkan oleh pre-amp. Karena tegangan ini mempunyai dua bandwidh frekuensi yang berbeda. Frekuensi detak jantung ibu berada pada range 40 - 50 Hz dan frekuensi detak jantung janin berada pada range 12 - 20 Hz. Sehingga untuk memisahkannya digunakan bandpass filter sesuai dengan range frekuensi detak jantung janin. Keluaran dari alat ini berupa suara detak jantung janin yang dapat didengarkan melalui speaker. 2.2 Gelombang Bunyi 5
Transcript of BAB II - UNNOCS | Indonesian electronics for … · Web viewGelombang bunyi mempunyai sifat-sifat...

BAB II
TINJAUAN PUSTAKA
2.1 Prinsip Dasar
Alat ini bekerja dengan cara merekam suara detak jantung janin
yang berada dalam kandungan ibu. Sensor yang digunakan berupa Stetoskope
dan Mic Condenser. Kemudian suara detak jantung janin diubah menjadi
tegangan oleh Mic Condensor, tegangan ini kemudian dikuatkan oleh pre-
amp. Karena tegangan ini mempunyai dua bandwidh frekuensi yang berbeda.
Frekuensi detak jantung ibu berada pada range 40 - 50 Hz dan frekuensi
detak jantung janin berada pada range 12 - 20 Hz. Sehingga untuk
memisahkannya digunakan bandpass filter sesuai dengan range frekuensi
detak jantung janin. Keluaran dari alat ini berupa suara detak jantung janin
yang dapat didengarkan melalui speaker.
2.2 Gelombang Bunyi
Bunyi dihantarkan dan dihasilkan oleh gerak suatu benda yang
bergetar. Getaran ini menimbulkan sejumlah gelombang kompresi yang
dapat berjalan melalui media yang padat, cair, atau gas.
Gelombang bunyi mempunyai sifat-sifat fisis seperti:
INTENSITAS. Intensitas bunyi tergantung pada besarnya pergeseran
gelombang bunyi. Intensitas ditentukan oleh energi dari sumber bunyi, jarak
yang ditempuh oleh bunyi, dan media yang harus dilalui bunyi untuk
5

mencapai pendengar.
FREKUENSI. Frekuensi bunyi ditentukan oleh jumlah getaran per detik (cycles per
second, cps). Makin besar cps, makin tinggi frekuensinya.
LAMANYA. Lamanya bunyi dikonrtol oleh lamanya waktu pelepasan energi dari
sumber bunyi. Bunyi kardiovaskuler terdiri dari getaran yang masanya pendek
(bunyi jantung) dan getaran yang lebih panjang masanya (murmur jantung).
2.3 Funandoscope
Bunyi jantung dapat didengar dengan menempatkan telinga langsung
di atas dada penderita. Dengan stetoskop, auskultasi mudah, sopan dan bunyi
terdengar lebih keras. Stetoskop untuk orang dewasa tidak dapat dipakai pada
anak. Dianjurkan memakai stetoskop dengan panjang selang sekitar 30 cm dan
diameter bagian dalam selang kira-kira 1/8 inchi. Ada 2 macam stetoskop
yaitu berbentuk sungkup dan diafragma. Sungkup lebih baik menagkap bunyi
bernada tinggi.
Funandoscope adalah suatu jenis khusus dari stetoskop yang digunakan
untuk mendengarkan denyut jantung janin, stetoskope ini biasanya dapat digunakan
setelah janin berumur lebih dari 18 minggu, hal ini digunakan untuk mengetahui
keadaan dari janin berdasarkan ritme dari denyut jantungnya.
Gambar 2.1 Bentuk dari Funandoscope
6

2.4 Mic Condenser
Mic condenser merupakan suatu komponen yang tepat jika digunakan
untuk menerima suatu gelombang bunyi. Mic condensor difungsikan sebagai
komponen untuk mengubah dari gelombang bunyi menjadi satuan tegangan
yang nantinya akan dikuatkan oleh rangkaian penguat agar dihasikan suara yang
lebih baik. Komponen ini mempunyai frekuensi respon yang sangat baik
sehingga tingkat sensitifitasnya tinggi untuk sebuah sensor.
Gambar 2.2 Bentuk dari Mic Condensor
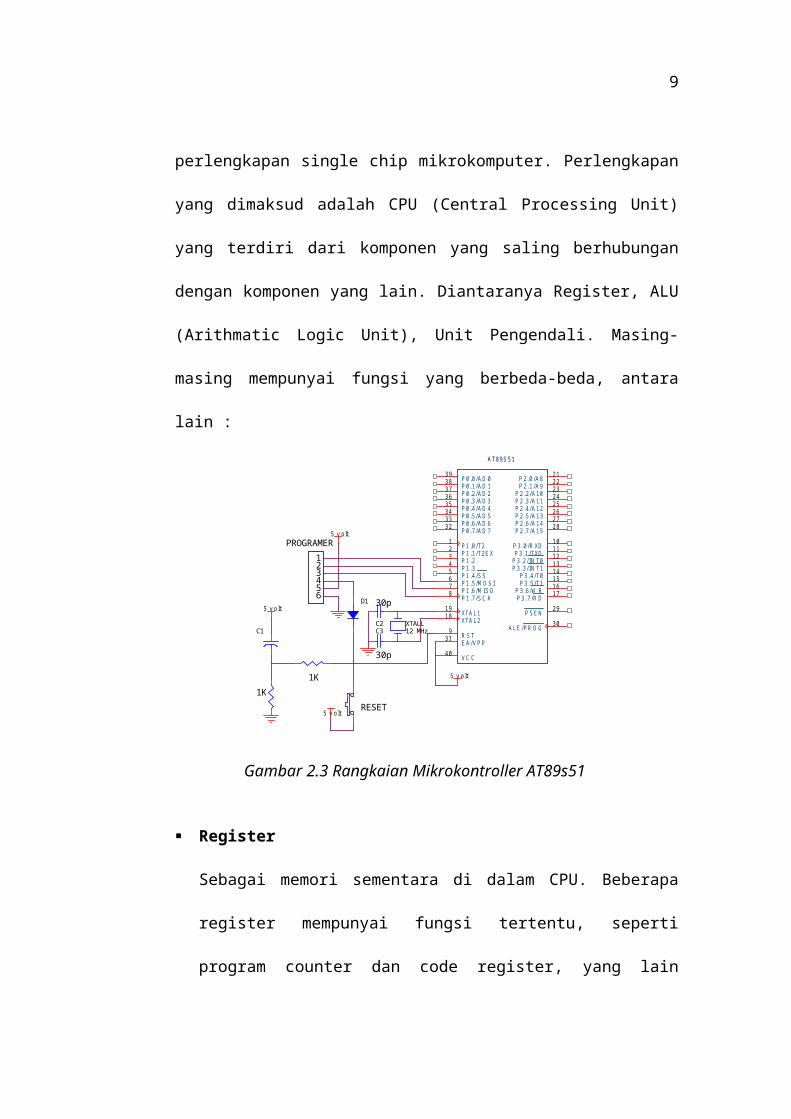
2.5 Rangkaian Mikrokontroler AT89S51
IC Mikrokontroler AT89S51 adalah komponen produksi Atmel yang
berorientasi pada kontrol dengan level logika CMOS. Komponen ini termasuk
keluarga MCS ’51. rangkaian integrasi tersebut memiliki perlengkapan single
chip mikrokomputer. Perlengkapan yang dimaksud adalah CPU (Central
Processing Unit) yang terdiri dari komponen yang saling berhubungan dengan
komponen yang lain. Diantaranya Register, ALU (Arithmatic Logic Unit),
Unit Pengendali. Masing-masing mempunyai fungsi yang berbeda-beda,
antara lain :
7
D1
1
RESET
6
XTALL12 MHz
45
C2
30p
30p
C3
1K
1K
PROGRAMER
3
C1
2
5 v o lt
5 v o lt
5 v o lt
5 v o lt
A T8 9 S 5 1
P 3 .1 /TXD1 1
P 3 .2 / I N T01 2
P 3 .3 / I N T11 3
P 3 .4 / T01 4
P 3 .5 / T11 5
P 3 .6 / W R1 6
P 3 .7 / R D1 7
XTA L 21 8 XTA L 11 9
P 2 .0 / A 82 1
P 2 .1 / A 92 2
P 2 .2 / A 1 02 3
P 2 .3 / A 1 12 4
P 2 .4 / A 1 22 5
P 2 .5 / A 1 32 6
P 2 .6 / A 1 42 7
P 2 .7 / A 1 52 8
P S E N2 9
A L E / P R O G3 0
R S T9
P 0 .7 / A D 73 2 P 0 .6 / A D 63 3 P 0 .5 / A D 53 4 P 0 .4 / A D 43 5 P 0 .3 / A D 33 6 P 0 .2 / A D 23 7 P 0 .1 / A D 13 8 P 0 .0 / A D 03 9
V C C4 0
P 1 .0 / T21
P 1 .1 / T2 E X2
P 1 .23
P 1 .34
P 1 .4 / S S5
P 1 .5 / M O S I6
P 1 .6 / M IS O7
P 1 .7 / S C K8
E A / V P P3 1
P 3 .0 / R XD1 0
Gambar 2.3 Rangkaian Mikrokontroller AT89s51
Register
Sebagai memori sementara di dalam CPU. Beberapa register mempunyai
fungsi tertentu, seperti program counter dan code register, yang lain
bersifat lebih umum akumulator, B register. Tiap-tiap komputer memiliki
panjang kata yang merupakan karakteristik dari CPU. Seperti pada
keluarga MCS ’51 ini besarnya ditentukan oleh bus dan memori internal,
oleh karenanya mikrokontroller keluarga MCS ’51 ini memiliki
kemampuan menyimpan data 8 bit.
ALU (Arithmatic Logic Unit)
Dari namanya dapat diketahui bahwa ALU mampu menjalankan operasi
aritmatika dan logika dengan bilangan-bilangan biner. Dalam keluarga
MCS ’51 operasi ALU datanya terbatas pada jumlah bilangan biner 8 bit,
tidak sampai pada operasi floating point (angka mengambang).
8
Unit Pengendali
Unit pengendali digunakan untuk menyerempakkan kerja yang sangat
diperlukan oleh setiap prosessor. Sebuah instruksi di ambil dan di dekode,
setelah prosessor mengetahui apa yang dimaksud dengan instruksi, maka
unit pengendali akan memberikan signal pada aksi yang dimaksud.
Mikrokontroller AT89S51 memiliki beberapa fasilitas yang dapat dipakai
oleh pengguna. Fasilitas yang dimaksud antara lain :
Flash program memori ROM internal sebesar 4 Kbyte. Dengan flash
PEROM ini mikrokontroller mampu diprogram dan dihapus hingga 1000
kali.
Memori data RAM internal sebesar 128 Byte.
Kemampuan kerja clock internal dari 0 hingga 24 M Hz.
Terdapat 2 buah timer/counter yang dapat dipakai hingga 16 Bit.
Kemampuan mengalamati memori program dan data maksimum 64 Kbyte
eksternal.
Dua buah tingkat prioritas interupsi.
Lima buah interupsi, yaitu 2 buah interupsi eksternal dan 3 buah interupsi
internal.
Empat buah I/O masing-masing 8 Bit.
Port serial full duplex UART (Universal Asincronous Receive Transmit),
dengan kemampuan pendeteksian kesalahan.
Mode pengontrolan daya, yaitu :
Mode Idle (daya akan berkurang jika CPU dikehendaki stand by).
9
Mode Power Down (oscillator berhenti yang berarti daya akan berkurang
karena intruksi yang dieksekusi menghendaki power down).
Pengembalian ke mode normal setelah power down karena adanya
interupsi.
Dapat diprogram per bit sehingga pemrograman akan lebih leluasa dan
efektif.
Dalam IC program AT89S51 terdapat beberapa port dan program-program
lain. Diantaranya adalah sebagai berikut:
Port 0.
Port 0 adalah 8 bit open drain bi-directional port 1/0. Pada saat sebagai
port out, tiap pin dapat dilewatkan ke 8 input TTL. Ketika logika 1
dituliskan pada port 0, maka pin-pin ini dapat digunakan sebagai input
yang berimpedansi tinggi. Port 0 dapat dikonfigurasikan untuk dimultiplex
sebagai jalur data/address bus selama membaca program external dan
memori data. Pada mode ini P0 mempunyai internal pull up. Port 0 juga
menerima kode bit selama pemrograman flash. Dan megeluarkan kode bit
selama verifikasi program.
Port 1.
Port 1 adalah 8-bit bi-directional Port 1/0 denga internal pull up. Port 1
mempunyai buffer output yang dapat dihubungkan dengan 4 TTL input.
Ketika logika 1 dituliskan ke port 1, pin ini dipull high dengan
menggunakan internal pull up dan dapat digunakan sebagai input. Ketika
sebagai input, pin port 1 yang secara eksternal dipull low akan
10
mengalirkan arus 1 L karena internal pull up. Port 1 juga menerima
address bawa selama pemrograman flash dan verifikasi.
Port 2.
Port 2 adalah 8 bit bi-directional port 1/0 dengan internal pull up. Port 2
output buffer dapat melewatkan 4 TTL input. Ketika logika 1 dituliskan ke
port 2, maka mereka dipull high dengan internal pull up dan dapat
digunakan sebagai input.
Port 3.
Port 3 adalah 8 bit bi-directional port 1/0 dengan internal pull up. Output
buffer dari port 3 dapat dilewati 4 input TTL. Ketika logika 1 dituliskan ke
port 3 maka mereka akan dipull high dengan internal pull up dan dapat
digunakan sebagai input. Port 3 juga mempunyai berbagai macam fungsi
atau fasilitas. Port 3 juga menerima beberapa sinyal kontrol untuk
pemrograman flash dan verifikasi.
RST.
Input reset. Logika high pada pin ini akan mereset siklus mesin.
ALE/PROG.
Pulsa Output Address Latch Enable digunakan untuk lacthing bit bawah
dari address selama mengakses ke eksternal memori. Pin ini juga
merupakan input pulsa program selama pemrograman flash. Operasi
normal dari ALE dikeluarkan pada laju konstan 1/6 dari frekuensi
oscilator, dan dapat digunakan untuk pewaktu eksternal atau pemberian
pulsa. Jika dikehendaki, operasi ALE dapat di disable dengan memberikan
11
setting bit 0 dari SFR pada lokasi 8 EH. Dengan bit set, ALE dapat
diaktifkan selama instruksi M0VX atau MOVC. Dengan mensetting ALE
disabled, tidak akan mempengaruhi jika mikrokontroler pada mode
eksekusi eksternal.
Port Pin Alternate Functions.
P3.0 RXD (serial input port).
P3.1 TXD (serial output port).
P3.2 INT0 (eksternal interupt 0).
P3.3 INT1 (eksternal interup 1).
P3.4 T0 (timer 0 eksternal input).
P3.5 T1 (timer 1 eksternal input).
P3.6 WR (eksternal data memori write strobe).
P3.7 RD (eksternal data memori read strobe).
PSEN.
Program store enable merupakan sinyal yang digunakan untuk membaca
program pada memori eksternal. Ketika 8951 mengeksekusi kode dari
program memori eksternal, PSEN diaktifkan 2 kali setiap siklus mesin,
kecuali bahwa 2 aktifasi PSEN terlewati selama pembacaan ke memori
data eksternal.
EA/VPP.
Eksternal Access enable. EA harus diposisikan ke GND untuk
mengaktifkan divais untuk mengumpankan kode dari program memori
yang dimulai pada lokasi 0000H sampai dengan FFFFH. EA harus
12
diposisikan ke VCC untuk eksekusi program internal. Pin ini juga
menerima tegangan pemrograman 12 Volt (VPP) selama pemrograman
flash.
XTAL 1.
Input oscilator inverting amplifier dan input untuk internal clock untuk
pengoperasian 2.
XTAL 2.
Output dari inverting oscilator amplifier.
2.6 LCD (Liquid Cristal Display) karakter
LCD adalah sebuah display dot matrix yang difungsikan untuk
menampilkan tulisan berupa angka atau huruf sesuai dengan yang diinginkan
(sesuai dengan program yang digunakan untuk mengontrolnya). Pada tugas
akhir ini penulis menggunakan LCD dot matrix dengan kharakter 2 x 16,
sehingga kaki-kakinya berjumlah 16 pin.
Gambar 2.4 Koneksi pin LCD ke Mikrokontroller
13

LCD yang penulis gunakan adalah M1632, yang mana digunakan
untuk menampilkan hasil konsentrasi. LCD ini hanya memerlukan daya yang
sangat kecil, tegangan yang dibutuhkan juga sangat rendah yaitu +5 VDC.
Panel TN LCD untuk pengaturan kekontrasan cahaya pada display dan CMOS
LCD drive sudah terdapat di dalamnya. Semua fungsi display dapat dikontrol
dengan memberikan instruksi dan dapat dengan mudah dipisahkan oleh MPU.
Ini membuat LCD berguna untuk range yang luas dari terminal display unit
untuk mikrokomputer dan display unit measuring gages.
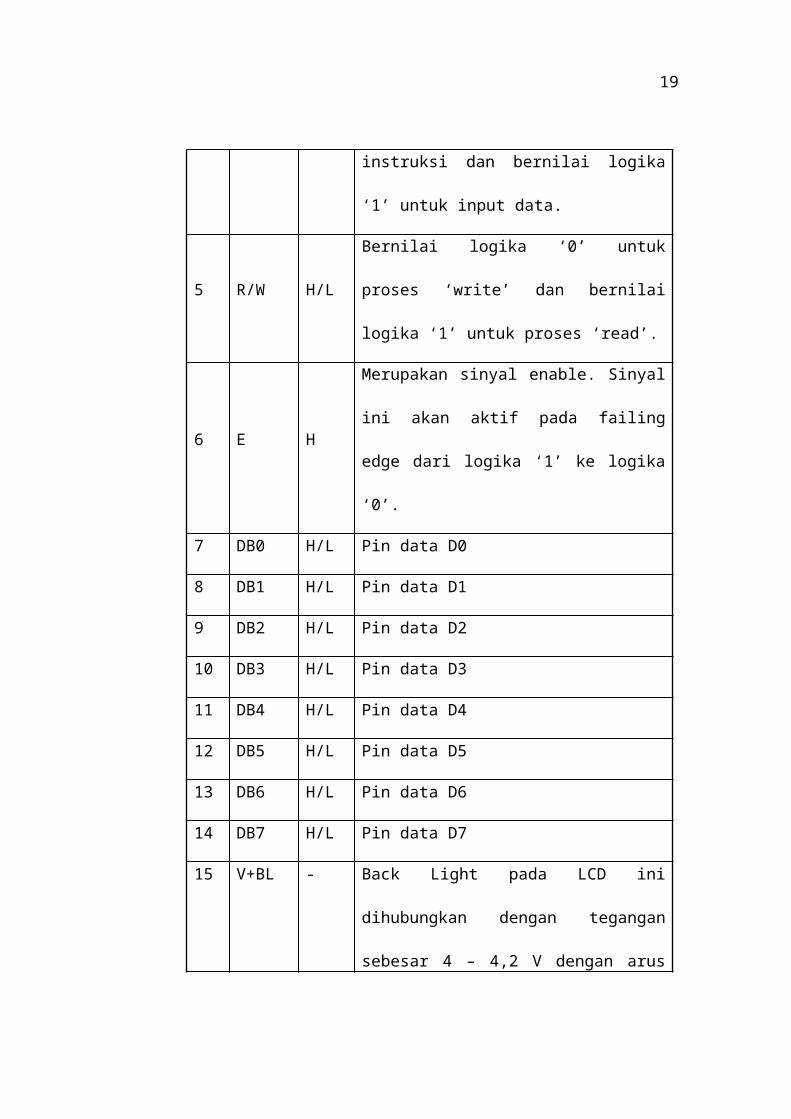
Tabel 2.1 Fungsi Pin Pada LCD
No. Symbol Level Keterangan
1 Vss - Dihubungkan ke 0 V (Ground)
2 Vcc -Dihubungkan dengan tegangan supply +5V
dengan toleransi ± 10%.
3 Vee -Digunakan untuk mengatur tingkat kontras
LCD.
4 RS H/LBernilai logika ‘0’ untuk input instruksi dan
bernilai logika ‘1’ untuk input data.
5 R/W H/LBernilai logika ‘0’ untuk proses ‘write’ dan
bernilai logika ‘1’ untuk proses ‘read’.
6 E HMerupakan sinyal enable. Sinyal ini akan aktif
pada failing edge dari logika ‘1’ ke logika ‘0’.
7 DB0 H/L Pin data D0
8 DB1 H/L Pin data D1
14

9 DB2 H/L Pin data D2
10 DB3 H/L Pin data D3
11 DB4 H/L Pin data D4
12 DB5 H/L Pin data D5
13 DB6 H/L Pin data D6
14 DB7 H/L Pin data D7
15 V+BL -
Back Light pada LCD ini dihubungkan dengan
tegangan sebesar 4 – 4,2 V dengan arus 50 –
200 mA
16 V-BL -Back Light pada LCD ini dihubungkan dengan
ground
Cara kerja menjalankan LCD :
Langkah 1 : Inisialisasi LCD.
Langkah 2 : Arahkan pada alamat yang dikehendaki (lihat tabel alamat).
Langkah 3 : Tuliskan data ke LCD, maka karakter akan tampil pada alamat
tersebut.
Beberapa fungsi instruksi dari LCD, yaitu :
1. Display Clear.
RS R/W DB7 DB6 DB5 DB4 DB3 DB2 DB1 DB0
0 0 0 0 0 0 0 0 0 1
Display Clear membersihkan semua tampilan dan mengembalikan
cursor pada posisi semula (address 0). Ruang kode 20 (heksadesimal)
15

ditulis ke semua alamat dari DD RAM, dan alamat 0 dari DD RAM diset ke
AC (Address Counter). Jika diubah, display akan kembali ke posisi semula.
Setelah perintah eksekusi pada Display Clear, mode entry akan
ditambahkan.
2. Cursor Home.
RS R/W DB7 DB6 DB5 DB4 DB3 DB2 DB1 DB0
0 0 0 0 0 0 0 0 1 *
* : invalid bit
Cursor Home mengembalikan cursor ke posisi semula (address 0).
DD RAM alamat 0 diset ke AC dan cursor kembali ke posisi semula. Isi
DD RAM jangan dirubah. Jika cursor sedang ON, maka akan kembali ke
sebelah kiri.
3. Entry Mode Set.
RS R/W DB7 DB6 DB5 DB4 DB3 DB2 DB1 DB0
0 0 0 0 0 0 0 1 I/D S
Entry Mode Set diset untuk menunjukkan perpindahan cursor dan
apakah display akan dirubah.
I/D : ketika I/D = 1, alamat akan ditambah satu dan cursor berpindah ke
kanan. Ketika I/D = 0, alamat akan dikurangi satu dan cursor
berpindah ke kiri.
S : ketika S = 1 dan I/D = 1, display berpindah ke kiri.
ketika S = 1 dan I/D = 0, display berpindah ke kanan.
ketika S = 0 , display tak berpindah.
16

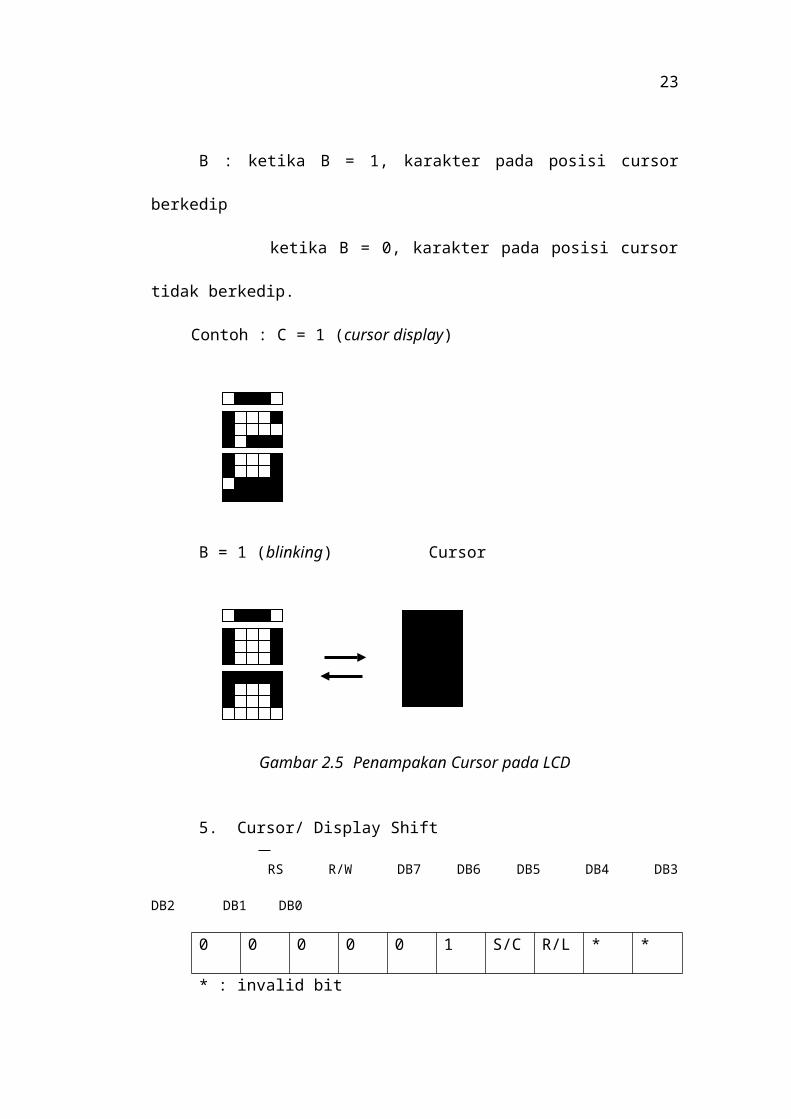
4. Display ON/OFF Control.
RS R/W DB7 DB6 DB5 DB4 DB3 DB2 DB1 DB0
0 0 0 0 0 0 1 D C B
Display ON/OFF Control mengembalikan total dispay dan cursor ON
dan OFF, dan membuat posisi cursor mulai berkedip.
D : ketika D = 1, display ON
ketika D = 0, display OFF
C : ketika C = 1, cursor ditampilkan
ketika C = 0, cursor tidak ditampilkan
B : ketika B = 1, karakter pada posisi cursor berkedip
ketika B = 0, karakter pada posisi cursor tidak berkedip.
Contoh : C = 1 (cursor display)
B = 1 (blinking) Cursor
Gambar 2.5 Penampakan Cursor pada LCD
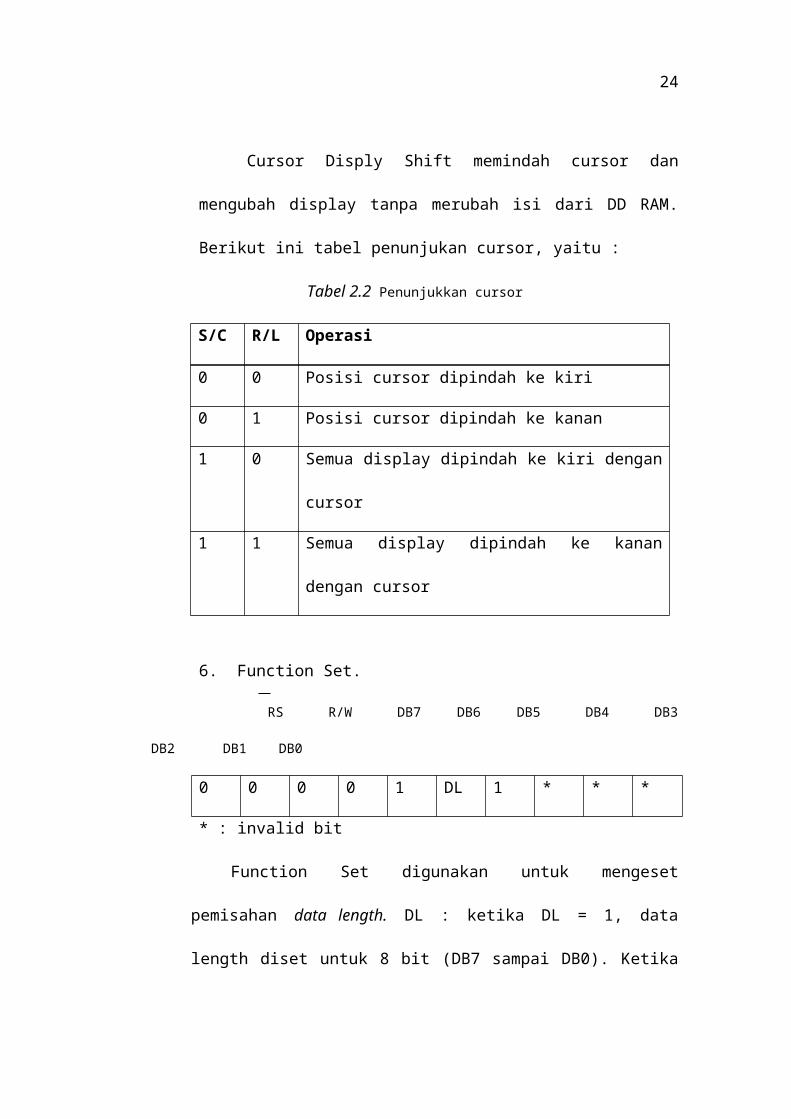
5. Cursor/ Display Shift
17

RS R/W DB7 DB6 DB5 DB4 DB3 DB2 DB1 DB0
0 0 0 0 0 1 S/C R/L * *
* : invalid bit
Cursor Disply Shift memindah cursor dan mengubah display tanpa
merubah isi dari DD RAM. Berikut ini tabel penunjukan cursor, yaitu :
Tabel 2.2 Penunjukkan cursor
S/C R/L Operasi
0 0 Posisi cursor dipindah ke kiri
0 1 Posisi cursor dipindah ke kanan
1 0 Semua display dipindah ke kiri dengan cursor
1 1 Semua display dipindah ke kanan dengan cursor
6. Function Set.
RS R/W DB7 DB6 DB5 DB4 DB3 DB2 DB1 DB0
0 0 0 0 1 DL 1 * * *
* : invalid bit
Function Set digunakan untuk mengeset pemisahan data length. DL :
ketika DL = 1, data length diset untuk 8 bit (DB7 sampai DB0). Ketika DL
= 0, data length diset untuk 4 bit (DB7 sampai DB4). Untuk bit atas
ditransfer lebih dulu, kemudian dilanjutkan bit bawah.
Tabel 2.3 Posisi Karakter Pada LCD Karakter 2 X 16
18
80 81 82 83 84 85 86 87 88 89 8a 8b 8c 8d 8e 8f
C0 C1 C2 C3 C4 C5 C6 C7 C8 C9 Ca Cb Cc Cd Ce Cf
2.7 Rangkaian Timer Monostable (IC NE 555)
Rangkaian Operation IC NE 555 digunakan untuk rangkaian mono
stabil dimana dikondisikan dari aktif low mwnjadi aktif high, sehinnga akan
mengaktifkan counter tetesan. Pada operasi monostable, fungsi dari timer
sebagai one-shot dapat terlihat pada gambar 2.6.
R 2 1
R 2 5
D 1
L E D
V C C
1 0 4
R 2 2
input
V C C
Ke P3.4
R 1 2
13
2
+ C 44 7 m f
U 1 1L M 5 5 5 /TO
2
5
3
7
6
4
TR
C V
Q
D I S
TH R
R
Gambar 2.6 Rangkaian Monostable pada NE 555
Ekternal kapasitor pada awalnya ter-discharge oleh transistor yang ada
dalam timer. Untuk menjalankan aplikasi ini diperlukan sebuah negative
trigger pulse tidak kurang dari 1/3 VCC pada pin 2, maka flip-flop akan aktif
karena pengaruh short circuit pada kapasitor dan mengeluarkan output high.
19

Gambar 2.7 Bentuk gelombang monostable
Tegangan pada kapasitor akan meningkat secara eksponensial dengan
periode t = 1,1 RA.C, pada akhir periode ini tegangan yang terjadi sebesar 2/3
VCC. Komparator akan me-reset flip-flop pada saat kapasitor menjadi
discharge, dan output yang dihasilkan menjadi low. Gambar 2.5 menunjukkan
gelombang yang terjadi saat operasi ini berlangsung, semuanya tergantung
pada power supply yang digunakan.
Gambar 2.8 Penentuan R dan C untuk waktu tunda
Gambar 2.8. menunjukkan penentuan kapasitor dan resistor untuk
mendapatkan waktu tunda yang diinginkan.
20

Selama siklus waktu dimana output high, apabila kita memberikan
trigger pulse tidak akan memberikan pengaruh apa-apa sampai sedikitnya 10
µs sebelum siklus waktu berakhir. Meskipun demikian selama siklus waktu
tersebut kita dapat me-reset sistem dengan memberikan negative pulse pada
pin reset.
2.8. Rangkaian Penguat (IC LM741)
Op-amp pada dasarnya adalah sebuah differential amplifier (penguat
diferensial) yang memiliki dua masukan. Input (masukan) op-amp seperti
yang telah dimaklumi ada yang dinamakan input inverting dan non-inverting.
Op-amp ideal memiliki open loop gain (penguatan loop terbuka) yang tak
terhingga besarnya. Seperti misalnya op-amp LM741 yang sering digunakan
oleh banyak praktisi elektronika, memiliki karakteristik tipikal open loop gain
sebesar 104 ~ 105. Penguatan yang sebesar ini membuat op-amp menjadi tidak
stabil, dan penguatannya menjadi tidak terukur (infinite). Disinilah peran
rangkaian negative feedback (umpanbalik negatif) diperlukan, sehingga op-
amp dapat dirangkai menjadi aplikasi dengan nilai penguatan yang terukur
(finite). Impedasi input op-amp ideal mestinya adalah tak terhingga, sehingga
mestinya arus input pada tiap masukannya adalah 0. Sebagai perbandingan
praktis, op-amp LM741 memiliki impedansi input Zin = 106 Ohm. Nilai
impedansi ini masih relatif sangat besar sehingga arus input op-amp LM741
mestinya sangat kecil.
21

IC LM741 atau yang biasa disebut dengan Amp merupakan
peranti yang mampu mengindera dari memperkuat sinyal masukan
baik DC maupun AC. Karakteristk Op-Amp yang terpenting adalah:
1. Impedansi masukan tinggi, sehingga arus masukan praktis dapat
diabaikan.
2. Penguatan loop terbuka amat tinggi.
3. Impedansi keluaran amat rendah sehingga keluaran penguat tidak
terpengaruh oleh pembebanan.
Dari IC LM741 ini dapat dibuat beberapa rangkaian sebagai berikut:
1. Penguat Non-Inverting
Prinsip utama rangkaian penguat non-inverting adalah seperti
yang diperlihatkan pada gambar berikut ini.
Gambar 2.9 Rangkaian Penguat Non-Inverting
Jika penguatan G adalah perbandingan tegangan keluaran
terhadap tegangan masukan, maka didapat penguatan op-amp non-
inverting :
22
= 1 +
Impendasi untuk rangkaian Op-amp non inverting adalah
impedansi dari input non-inverting op-amp tersebut. Dari datasheet,
LM741 diketahui memiliki impedansi input Zin = 108 to 1012 Ohm.
2. Penguat Inverting
Rangkaian dasar penguat inverting adalah seperti yang
ditunjukkan pada gambar berikut, dimana sinyal masukannya dibuat
melalui input inverting.
Gambar 2.10 Rangkaian Penguat Inverting
Jika penguatan G didefenisikan sebagai perbandingan tegangan
keluaran terhadap tegangan masukan, maka dapat ditulis :
=
Impedansi rangkaian inverting didefenisikan sebagai impedansi
input dari sinyal masukan terhadap ground. Karena input inverting (-)
pada rangkaian ini diketahui adalah 0 (virtual ground) maka impendasi
rangkaian ini tentu saja adalah Zin = R1.
23
3. Integrator
Opamp bisa juga digunakan untuk membuat rangkaian-rangkaian
dengan respons frekuensi, misalnya rangkaian penapis (filter). Salah satu
contohnya adalah rangkaian integrator seperti yang ditunjukkan pada
gambar. Rangkaian dasar sebuah integrator adalah rangkaian op-amp
inverting, hanya saja rangkaian umpanbaliknya (feedback) bukan
resistor melainkan menggunakan capasitor C.
Gambar 2.11 Rangkaian Integrator
Prinsip dari rangkaian ini sama dengan menganalisa rangkaian
op-amp inverting. Rumus ini dapat diperoleh dengan mengingat rumus
dasar penguatan opamp inverting
G = - R2/R1. Pada rangkaian integrator tersebut diketahui
Dengan demikian dapat diperoleh penguatan integrator
atau agar terlihat respons frekuensinya dapat juga ditulis dengan
24

Karena respons frekuensinya yang demikian, rangkain integrator
ini merupakan dasar dari low pass filter. Terlihat dari rumus tersebut
secara matematis, penguatan akan semakin kecil (meredam) jika
frekuensi sinyal input semakin besar.
Pada prakteknya, rangkaian feedback integrator mesti diparalel
dengan sebuah resistor dengan nilai misalnya 10 kali nilai R atau satu
besaran tertentu yang diinginkan. Ketika inputnya berupa sinyal dc
(frekuensi = 0), kapasitor akan berupa saklar terbuka. Jika tanpa resistor
feedback seketika itu juga outputnya akan saturasi sebab rangkaian
umpanbalik op-amp menjadi open loop (penguatan open loop opamp
ideal tidak berhingga atau sangat besar). Nilai resistor feedback sebesar
10R akan selalu menjamin output offset voltage (offset tegangan
keluaran) sebesar 10x sampai pada suatu frekuensi cutoff tertentu.
4. Defferensiator
Dengan analisa yang sama seperti rangkaian integrator, akan
diperoleh persamaan penguatannya :
Rumus ini secara matematis menunjukkan bahwa tegangan
keluaran vout pada rangkaian ini adalah differensiasi dari tegangan input
vin. Contoh praktis dari hubungan matematis ini adalah jika tegangan
input berupa sinyal segitiga, maka outputnya akan mengahasilkan sinyal
kotak.
25

Gambar 2.12 Rangkaian Defferensiator
Bentuk rangkain differensiator adalah mirip dengan rangkaian
inverting. Sehingga jika ditinjau dari rumus penguat inverting
G = -R2/R1
dan pada rangkaian differensiator diketahui :
maka jika besaran ini disubtitusikan akan didapat rumus penguat
differensiator
Dari hubungan ini terlihat sistem akan meloloskan frekuensi tinggi (high
pass filter), dimana besar penguatan berbanding lurus dengan frekuensi.
Namun demikian, sistem seperti ini akan menguatkan noise yang
umumnya berfrekuensi tinggi. Untuk praktisnya, rangkain ini dibuat
dengan penguatan dc sebesar 1 (unity gain). Biasanya kapasitor diseri
dengan sebuah resistor yang nilainya sama dengan R. Dengan cara ini
akan diperoleh penguatan 1 (unity gain) pada nilai frekuensi cutoff
tertentu.
26