BAB II TINJAUAN PUSTAKA 2.1. Sistem Transportasi Makro
32
5 Institut Teknologi Nasional BAB II TINJAUAN PUSTAKA 2.1. Sistem Transportasi Makro Sistem transportasi adalah suatu bentuk keterkaitan dan keterikatan antara penumpang atau barang, prasarana dan sarana transportasi yang berinteraksi dalam rangkaian perpindahan penumpang atau barang yang tercakup dalam suatu tatanan baik secara alami maupun rekayasa (buatan). Sistem transportasi bertujuan untuk mengoptimumkan proses transportai penumpang dan barang dalam ruang dan waktu tertentu, dengan mempertimbangkan berbagai faktor seperti keamanan, kenyamanan, keselamatan, kelancaran, serta efisiensi waktu dan biaya. Sistem transportasi secara menyeluruh (makro) dapat dipecahkan menjadi beberapa sub- sistem (mikro) halmana masing-masing sistem mikro tersebut akan saling terkait dan saling mempengaruhi. Sistem mikro tersebut adalah sebagai berikut (Tamin, 1994): 1. Sistem Kegiatan (Transport Demand). 2. Sistem Jaringan (Prasarana Transportasi/Transport Supply). 3. Sistem Pergerakan (Lalu Lintas/Traffic). 4. Sistem Kelembagaan. Sistem Kegiatan mempunyai tipe kegiatan tertentu yang akan membangkitkan pergerakan (traffic production) dan akan menarik pergerakan (traffic attraction). Sistem tersebut merupakan suatu sistem pola kegiatan tata guna lahan yang terdiri dari sistem pola kegiatan sosial, ekonomi, kebudayaan, dan lain- lain. Kegiatan yang timbul dalam sistem ini membutuhkan adanya pergerakan sebagai alat pemenuhan kebutuhan yang perlu dilakukan setiap harinya yang tidak dapat dipenuhi oleh tata guna tanah tersebut. Besarnya pergerakan yang ditimbulkan tersebut sangat berkaitan erat dengan jenis dan intensitas kegiatan yang dilakukan (Tamin, 2000). Pergerakan tersebut baik berupa pergerakan manusia dan/atau barang jelas membutuhkan suatu moda transportasi (sarana) dan media (prasarana) tempat moda transportasi tersebut dapat bergerak. Prasarana transportasi yang diperlukan
Transcript of BAB II TINJAUAN PUSTAKA 2.1. Sistem Transportasi Makro
5 Institut Teknologi Nasional
BAB II
TINJAUAN PUSTAKA
2.1. Sistem Transportasi Makro
Sistem transportasi adalah suatu bentuk keterkaitan dan keterikatan antara
penumpang atau barang, prasarana dan sarana transportasi yang berinteraksi dalam
rangkaian perpindahan penumpang atau barang yang tercakup dalam suatu tatanan
baik secara alami maupun rekayasa (buatan). Sistem transportasi bertujuan untuk
mengoptimumkan proses transportai penumpang dan barang dalam ruang dan
waktu tertentu, dengan mempertimbangkan berbagai faktor seperti keamanan,
kenyamanan, keselamatan, kelancaran, serta efisiensi waktu dan biaya. Sistem
transportasi secara menyeluruh (makro) dapat dipecahkan menjadi beberapa sub-
sistem (mikro) halmana masing-masing sistem mikro tersebut akan saling terkait
dan saling mempengaruhi. Sistem mikro tersebut adalah sebagai berikut (Tamin,
1994):
1. Sistem Kegiatan (Transport Demand).
2. Sistem Jaringan (Prasarana Transportasi/Transport Supply).
3. Sistem Pergerakan (Lalu Lintas/Traffic).
4. Sistem Kelembagaan.
Sistem Kegiatan mempunyai tipe kegiatan tertentu yang akan
membangkitkan pergerakan (traffic production) dan akan menarik pergerakan
(traffic attraction). Sistem tersebut merupakan suatu sistem pola kegiatan tata guna
lahan yang terdiri dari sistem pola kegiatan sosial, ekonomi, kebudayaan, dan lain-
lain. Kegiatan yang timbul dalam sistem ini membutuhkan adanya pergerakan
sebagai alat pemenuhan kebutuhan yang perlu dilakukan setiap harinya yang tidak
dapat dipenuhi oleh tata guna tanah tersebut. Besarnya pergerakan yang
ditimbulkan tersebut sangat berkaitan erat dengan jenis dan intensitas kegiatan yang
dilakukan (Tamin, 2000).
Pergerakan tersebut baik berupa pergerakan manusia dan/atau barang jelas
membutuhkan suatu moda transportasi (sarana) dan media (prasarana) tempat moda
transportasi tersebut dapat bergerak. Prasarana transportasi yang diperlukan

6
Institut Teknologi Nasional
tersebut merupakan sistem mikro yang kedua yang biasa dikenal dengan Sistem
Jaringan yang meliputi jaringan jalan raya, kereta api, terminal bus dan kereta api,
bandara, dan pelabuhan laut (Tamin, 2000).
Interaksi antara Sistem Kegiatan dan Sistem Jaringan ini akan menghasilkan
suatu pergerakan manusia dan/atau barang dalam bentuk pergerakan kendaraan
dan/atau orang (pejalan kaki). Suatu Sistem Pergerakan yang aman, cepat, nyaman,
murah, dan sesuai dengan lingkungannya akan dapat tercipta jika pergerakan
tersebut diatur oleh suatu sistem rekayasa dan manajemen lalu-lintas yang baik.
Sistem Kegiatan, Sistem Jaringan, dan Sistem Pergerakan akan saling
mempengaruhi satu dengan lainnya seperti terlihat pada Gambar 2.1 (Tamin, 2000).
Gambar 2.1 Sistem Transportasi Makro
Sumber: Tamin, 2000.
Perubahan pada Sistem Kegiatan jelas akan mempengaruhi Sistem Jaringan
melalui suatu perubahan pada tingkat pelayanan pada sistem pergerakan. Begitu
juga perubahan pada Sistem Jaringan akan dapat mempengaruhi Sistem Kegiatan
melalui peningkatan mobilitas dan aksesibilitas dari sistem pergerakan tersebut.
Selain itu, Sistem Pergerakan memegang peranan yang penting dalam
mengakomodir suatu sistem pergerakan agar tercipta suatu sistem pergerakan yang
lancar yang akhirnya juga pasti akan mempengaruhi kembali Sistem Kegiatan dan
Sistem Jaringan yang ada. Ketiga sistem mikro ini saling berinteraksi satu dengan
yang lainnya yang terkait dalam suatu sistem transportasi makro (Tamin, 2000).
7
Institut Teknologi Nasional
2.2. Jalan dan Sistem Jaringan Jalan
Jalan adalah prasarana transportasi darat yang digunakan sebagai tempat
bergeraknya kendaraan untuk melakukan pergerakan lalu lintas dari suatu tempat
ke tempat lain. Jalan digunakan sebagai prasarana distribusi barang maupun jasa
dalam memenuhi kebutuhan kehidupan masyarakat.
Menurut Undang-Undang Nomor 38 Tahun 2004 tentang Jalan Pasal 6 Ayat
1, jalan menurut peruntukkannya terdiri dari dua yaitu jalan umum dan jalan
khusus. Jalan umum adalah jalan yang dapat digunakan untuk lalu lintas umum
dalam mendistribusikan barang maupun jasa. Sedangkan jalan khusus adalah jalan
yang tidak dapat digunakan untuk lalu lintas umum yang dibangun dan dikelola
oleh orang atau instansi tertentu untuk kepentingan sendiri.
Berdasarkan fungsinya, Undang-Undang Nomor 38 Tahun 2004 tentang
Jalan Pasal 8 Ayat 1 mengelompokkan jalan umum menjadi 4 (empat) yaitu:
1. Jalan Arteri
Jalan arteri merupakan jalan umum yang berfungsi melayani angkutan
utama dengan ciri perjalanan jarak jauh, kecepatan rata-rata tinggi, dan
jumlah jalan masuk dibatasi secara berdaya guna.
2. Jalan Kolektor
Jalan kolektor merupakan jalan umum yang berfungsi melayani angkutan
pengumpul atau pembagi dengan ciri perjalanan jarak sedang, kecepatan
rata-rata sedang, dan jumlah jalan masuk dibatasi.
3. Jalan Lokal
Jalan lokal merupakan jalan umum yang berfungsi melayani angkutan
setempat dengan ciri perjalanan jarak dekat, kecepatan rata-rata rendah, dan
jumlah jalan masuk tidak dibatasi.
4. Jalan Lingkungan
Jalan lingkungan merupakan jalan umum yang berfungsi melayani angkutan
lingkungan dengan ciri perjalanan jarak dekat, dan kecepatan rata-rata
rendah.
Sistem jaringan jalan adalah satu kesatuan ruas jalan yang saling
menghubungkan dan mengikat pusat-pusat pertumbuhan dengan wilayah ynng

8
Institut Teknologi Nasional
terjalin dalam hubungan hierarkis. Menurut Undang-Undang Nomor 38 Tahun
2004 tentang Jalan Pasal 7 Ayat 1, sistem jaringan jalan terbagi atas 2 (dua) yaitu:
1. Sistem Jaringan Jalan Primer
Sistem jaringan jalan primer merupakan sistem jaringan jalan dengan
peranan pelayanan distribusi barang dan jasa untuk pengembangan semua
wilayah di tingkat nasional, dengan menghubungkan semua simpul jasa
distribusi yang berwujud pusat-pusat kegiatan. Gambar 2.2 menunjukkan
struktur hierarki sistem jaringan jalan primer di perkotaan.
Gambar 2.2 Struktur Hierarki Jaringan Jalan Primer
Sumber: Departemen Permukiman dan Prasarana Wilayah, 2004.
2. Sistem Jaringan Jalan Sekunder
Sistem jaringan jalan sekunder merupakan sistem jaringan jalan dengan
peranan pelayanan distribusi barang dan jasa untuk masyarakat di dalam
kawasan perkotaan. Gambar 2.3 menunjukkan struktur hierarki sistem
jaringan jalan sekunder di perkotaan.

9
Institut Teknologi Nasional
Gambar 2.3 Struktur Hierarki Jaringan Jalan Sekunder
Sumber: Departemen Permukiman dan Prasarana Wilayah, 2004.
2.3. Kebutuhan untuk Data Jaringan Jalan
Salah satu data yang dibutuhkan dalam pemodelan transportasi adalah data
jaringan jalan. Untuk mendapatkan data jaringan jalan selain pengamatan langsung
juga perlu melakukan perhitungan lebih lanjut. Data jaringan jalan yang diperoleh
adalah data-data yang menyatakan keadaan sesungguhnya di lapangan. Data
jaringan jalan yang dibutuhkan dalam pemodelan transportasi antara lain
karakteristik jalan, arus lalu lintas, kapasitas ruas jalan, dan kecepatan arus bebas
(feee flow speed).
2.3.1. Karakteristik Jalan
Karakteristik jalan adalah sifat fisik dari suatu ruas jalan. Data-data yang
termasuk dalam karakteristik jalan adalah panjang jalan, lebar jalan, dan tipe jalan.
Panjang jalan dan lebar jalan termasuk data geometrik jalan yang dapat diperoleh
melalui pengukuran langsung atau melalui GPS (Global Positioning System).
Untuk lebar jalan biasanya dapat dinyatakan dalam lebar per lajur dengan satuan

10
Institut Teknologi Nasional
meter [m]. Panjang jalan dapat dinyatakan dengan satuan kilometer [km] atau meter
[m]. Tipe jalan dapat diperoleh melalui pengamatan langsung. Tipe jalan
dinyatakan dalam kode angka yang terdiri dari jumlah lajur dan jumlah arah pada
suatu ruas jalan diikuti dengan huruf ‘D’/’T’ atau ‘UD’/’TT’. D merupakan
singkatan dari Divided (Terpisah), artinya jalan antar arah yang berlawanan
dipisahkan dengan median. UD merupakan singkatan dari Un-Divided (Tidak
Terpisah), artinya jalan antar arah yang berlawanan tidak dipisahkan dengan
median melainkan hanya dengan marka saja. Misalnya tipe jalan 2/2 UD artinya
adalah jalan dengan dua lajur dan dua arah tidak terpisah, dan 4/2 D artinya adalah
jalan dengan empat lajur dan dua arah yang dipisahkan oleh median.
2.3.2. Arus Lalu Lintas
Arus lalu lintas adalah jumlah kendaraan yang melewati suatu titik
pengamatan dalam satuan waktu dan disimbolkan dalam 𝑄. Menurut Manual
Kinerja Jalan Indonesia (MKJI) 1997 kendaraan yang diperhitungkan sebagai arus
lalu lintas hanya kendaraan bermotor, sedangkan kendaraan tidak bermotor
(kendaraan yang tidak digerakan oleh mesin) tidak diperhitungkan sebagai arus lalu
lintas melainkan diperhitungkan sebagai hambatan samping (side friction).
Arus lalu lintas dapat dinyatakan dalam kendaraan per jam [kend/jam] yang
disimbolkan dengan 𝑄𝑘𝑒𝑛𝑑, satuan mobil penumpang per jam [smp/jam] yang
disimbolkan dengan 𝑄𝑠𝑚𝑝, Lintasan Harian Rata-rata (LHR), atau Lintasan Harian
Rata-rata Tahunan (LHRT). Data arus lalu lintas dapat diperoleh melalui observasi
lapangan dengan cara survei yang dilakukan dalam waktu dan durasi tertentu. Data
arus lalu lintas bersifat tidak tetap, data yang diperoleh hari ini belum tentu sama
dengan data keesokan hari dan seterusnya.
2.3.3. Kapasitas Jalan
Kapasitas adalah jumlah arus lalu lintas yang tetap atau dapat dipertahankan
pada suatu bagian jalan dalam kondisi tertentu. Kapasitas dari jalan dipengaruhi
oleh tipe jalan, lebar jalan, hambatan samping, distribusi arah, dan ukuran kota.
Kapasitas disimbolkan dengan 𝐶 yang berasal dari kata capacity. Kapasitas suatu

11
Institut Teknologi Nasional
jalan biasanya dinyatakan dalam satuan kend/jam atau smp/jam (Direktorat
Jenderal Bina Marga, 1997).
Menurut Peraturan Pemerintah No. 34 Tahun 2006 tentang Jalan Pasal 12
Ayat 1, kapasitas jalan merupakan jumlah maksimum kendaraan yang dapat
melewati suatu penampang tertentu pada suatu ruas jalan, satuan waktu, keadaan
jalan, dan lalu lintas tertentu.
2.3.4. Kecepatan Arus Bebas
Kecepatan arus bebas (free flow speed) didefinisikan sebagai kecepatan
pada tingkat arus nol, yaitu kecepatan yang akan dipilih pengemudi jika
mengendarai kendaraan bermotor tanpa dipengaruhi oleh kendaraan bermotor lain
di jalan. Kecepatan arus bebas telah diamati melalui pengumpulan data lapangan,
dimana hubungan antara kecepatan arus bebas dengan kondisi geometrik dan
lingkungan telah ditentukan dengan metode regresi. Kecepatan arus bebas
kendaraan ringan telah dipilih sebagai kriteria dasar untuk kinerja segmen jalan
pada arus = 0. Kecepatan arus bebas untuk kendaraan berat dan sepeda motor juga
diberikan sebagai referensi. Kecepatan arus bebas untuk mobil penumpang
biasanya 10-15% lebih tinggi dari tipe kendaraan ringan lain (Direktorat Jenderal
Bina Marga, 1997).
2.4. Pemodelan Transportasi
Ada banyak cara untuk membuat model, seperti model yang dibuat fisiknya,
model dalam peta dan diagram, dan model dalam bahasa matematika dan statistik.
Dalam membuat model transportasi, model dalam bentuk bahasa matematika dan
statistik lebih cocok untuk digunakan karena hasil analisisnya dapat terukur dengan
angka secara matematis. Selain itu model transportasi juga dapat disimulasikan
dalam sebauh aplikasi atau perangkat lunak pada komputer untuk mempermudah
analisis dan menghemat waktu. Bagian-bagian yang akan dimodelkan pada aplikasi
adalah daerah kajian sebagai batas pemodelan, pusat dari zona kajian sebagai inti
pergerakan antar zona, dan ruas jalan yang akan membentuk link atau penghubung
zona.
12
Institut Teknologi Nasional
2.4.1. Daerah Kajian
Daerah yang akan dikaji harus ditentukan untuk medefinisikan sistem
kegiatan dan sistem jaringan. Biasanya daerah kajian mencakup wilayah suatu kota,
akan tetapi harus dapat mencakup ruang atau daerah yang cukup untuk
pengembangan kota dimasa mendatang pada tahun rencana. Biasanya survei
kendaraan yang melalui garis kordon (batas daerah kajian) perlu dilakukan agar
batas dapat ditentukan sehingga tidak memotong jalan yang sama lebih dari dua
kali (untuk menghindari perhitungan ganda dua kendaraan yang sama). Batas
tersebut juga bisa berupa batas alami seperti sungai dan rel kereta api (Tamin,
2000).
Aktivitas tata guna lahan (dan zona asal) atau sistem kegiatan diasumsikan
berlokasi pada titik tertentu dalam zona yang disebut pusat zona. Dua dimensi yang
perlu diperhatikan adalah jumlah zona dan ukuran atau luas zona. Keduanya jelas
saling terkait. Semakin banyak jumlah zona, semakin kecil luas daerah yang dapat
diliput oleh zona tersebut. Dalam prakteknya, tingkat resolusi sistem zona sangat
tergantung dari maksud dan tujuan kajian, batasan kondisi waktu, serta biaya kajian.
Penggunaan sistem zona yang berbeda-beda untuk suatu daerah kajian
menimbulkan kesulitan pada saat menggunakan data hasil kajian terdahulu dan
sewaktu membuat perbandingan dari hal yang diakibatkannya. Ini semua
disebabkan oleh adanya perbedaan tingkat resolusi sistem zona yang digunakan
(Tamin, 2000).
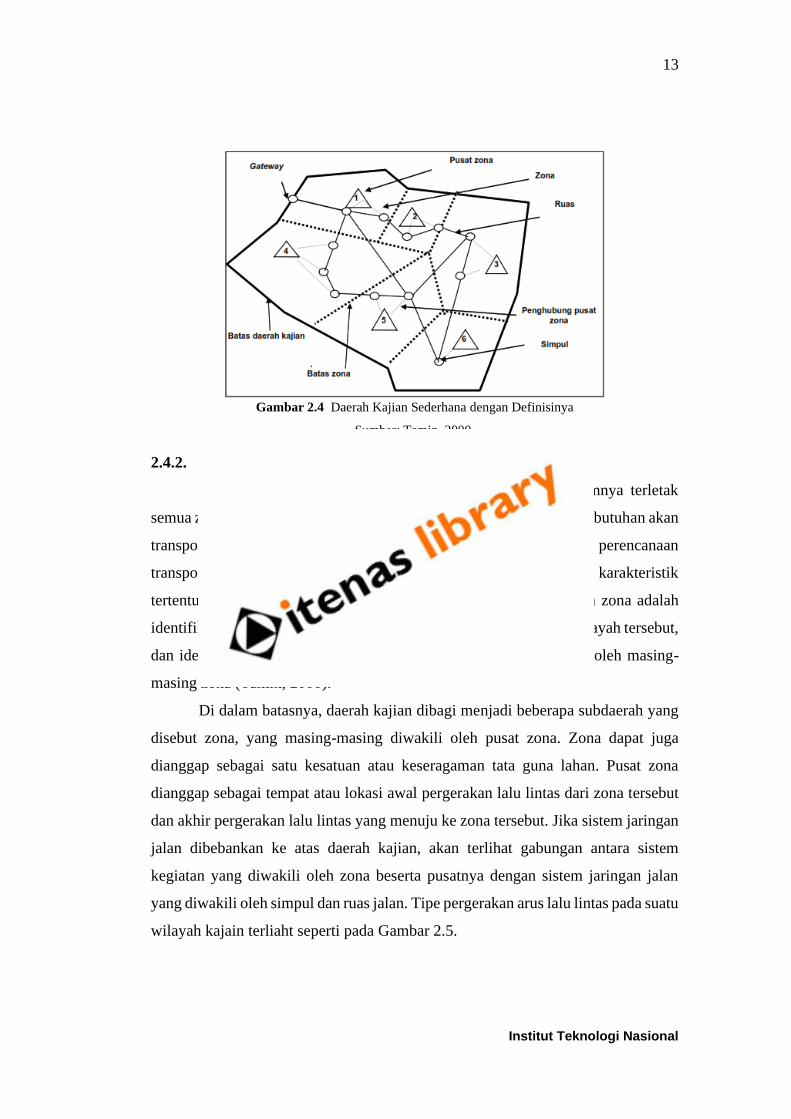
Secara umum, jaringan digunakan untuk menggambarkan sebuah struktur
yang berlainan fisik, seperti jalan dan persimpangan. Tiap-tiap dari jaringan terdiri
dari dua tipe dari tiap elemen-elemen, yaitu sebuah titik-titik dan sebuah segmen-
segmen garis yang menghubungkan titik-titik tersebut. Pengamatan ini mendahului
definisi secara matematis mengenai jaringan, yaitu sebagai sebuah simpul (node)
dan sebuah ruas (link) yang menghubungkan simpul tersebut (Tamin, 2000).
Gambar 2.4 menunjukkan contoh daerah kajian sederhana beserta definisinya.
13
Institut Teknologi Nasional
Gambar 2.4 Daerah Kajian Sederhana dengan Definisinya
Sumber: Tamin, 2000.
2.4.2. Zona Kajian
Daerah kajian adalah suatu daerah geografis yang di dalamnya terletak
semua zona asal dan zona tujuan yang diperhitungkan dalam model kebutuhan akan
transportasi. Zona merupakan suatu satuan ruang dalam tahapan perencanaan
transportasi yang mewakili suatu wilayah tertentu yang memiliki karakteristik
tertentu pula. Salah satu hal yang mendasar pada proses pembagian zona adalah
identifikasi sistem kegiatan (guna lahan) yang signifikan terjadi di wilayah tersebut,
dan identifikasi tingkat keseragaman tata guna lahan yang diwakili oleh masing-
masing zona (Tamin, 2000).
Di dalam batasnya, daerah kajian dibagi menjadi beberapa subdaerah yang
disebut zona, yang masing-masing diwakili oleh pusat zona. Zona dapat juga
dianggap sebagai satu kesatuan atau keseragaman tata guna lahan. Pusat zona
dianggap sebagai tempat atau lokasi awal pergerakan lalu lintas dari zona tersebut
dan akhir pergerakan lalu lintas yang menuju ke zona tersebut. Jika sistem jaringan
jalan dibebankan ke atas daerah kajian, akan terlihat gabungan antara sistem
kegiatan yang diwakili oleh zona beserta pusatnya dengan sistem jaringan jalan
yang diwakili oleh simpul dan ruas jalan. Tipe pergerakan arus lalu lintas pada suatu
wilayah kajain terliaht seperti pada Gambar 2.5.

14
Institut Teknologi Nasional
Gambar 2.5 Tipe Pergerakan Arus Lalu Lintas
Sumber: Tamin, 2000.
Zona internal adalah zona yang berada di dalam daerah kajian, sedangkan
zona eksternal adalah zona yang berada di luar daerah kajian. lSehubungan dengan
adanya definisi zona internal dan zona eksternal sebagai zona asal dan zona tujuan,
maka pergerakan arus lalu lintas dapat dikelompokkan menjadi 4 (empat) tipe
pergerakan yaitu sebagai berikut:
1. Pergerakan eksternal−eksternal
Pergerakan ini mempunyai zona asal dan zona tujuan yang berada di luar
daerah kajian (zona eksternal). Tipe pergerakan ini sangat penting untuk
diketahui karena sebenarnya pelaku pergerakan ini tidak mempunyai tujuan
atau kepentingan sama sekali ke zona internal tetapi terpaksa harus
menggunakan sistem jaringan dalam daerah kajian dalam proses pencapaian
zona tujuannya (mungkin karena tidak ada alternatif rute lainnya).
2. Pergerakan internal−eksternal atau sebaliknya
Pergerakan ini mempunyai salah satu zona (asal atau tujuan) yang berada di
luar daerah kajian (zona eksternal).
3. Pergerakan internal−internal
Pergerakan ini mempunyai zona asal dan tujuan yang berada di dalam
daerah kajian (zona internal). Tipe pergerakan inilah yang paling

15
Institut Teknologi Nasional
diutamakan dalam proses perencanaan transportasi. Tujuan utama dari
berbagai perencanaan transportasi adalah untuk meramalkan pergerakan
tipe ini dan sekaligus menentukan kebijakan yang perlu diambil dalam
menanganinya.
4. Pergerakan intrazona
Pergerakan ini mempunyai zona asal dan tujuan yang berada di dalam satu
zona internal tertentu. Karena definisi pusat zona adalah tempat dimulai atau
diakhirinya pergerakan dari dan ke zona tersebut, dapat dipastikan bahwa
pergerakan intrazona tidak akan pernah terbebankan ke sistem jaringan
(karena pergerakan dimulai dan diakhiri pada titik/lokasi yang sama).
2.4.3. Ruas Jalan
Menurut Tamin (2000), jaringan transportasi dapat dicerminkan dalam
bentuk ruas dan simpul, yang semuanya dihubungkan ke pusat zona. Beberapa ciri
ruas jalan perlu diketahui, seperti panjang, kecepatan, jumlah lajur, jenis gangguan
samping, kapasitas dan hubungan kecepatan–arus di ruas jalan tersebut. Simpul
dapat mencerminkan persimpangan atau kota, sedangkan ruas jalan mencerminkan
ruas jalan antara persimpangan atau ruas jalan antarkota. Ruas jalan dinyatakan
dengan dua buah nomor simpul di ujung-ujungnya. Ruas jalan dua arah selalu
dinyatakan dengan dua ruas jalan satu arah.
Kunci utama dalam merencanakan sistem jaringan jalan adalah penetuan
tingkat hierarki jalan yang akan dianalisis (arteri, kolektor, atau lokal). Jensen and
Bovy (1982) dalam Tamin (2000) menyatakan bahwa untuk meningkatkan
ketepatan pembebanan arus lalu lintas pada ruas jalan di suatu sistem jaringan perlu
ditetapkan sekurang-kurangnya jalan yang mempunyai hierarki satu tingkat lebih
rendah dari yang ingin dianalisis. Misalnya jika ingin menganalisis sistem jalan
arteri, maka harus membuat sistem jaringan yang terdiri dari arteri dan kolektor.
Hal ini sangat tergantung pada jenis dan tujuan kajian. Jika semakin banyak jalan
yang ditetapkan, maka hasilnya akan lebih teliti, tetapi kebutuhan akan sumber daya
juga akan meningkat dan kerumitan perhitungan juga semakin meningkat (Tamin,
2000).

16
Institut Teknologi Nasional
2.5. Konsep Model Perencanaan Transportasi Empat Tahap
Sampai saat ini ada berbagai macam konsep perencanaan transportasi yang
sering digunakan dalam membuat model trasnportasi, salah satu konsep yang paling
terkenal adalah konsep Model Perencanaan Transporrtasi Empat Tahap. Konsep ini
terdiri dari gabungan sub-sub model halmana masing-masing sub model harus
dikerjakan secara terpisah dan berurutan (Tamin, 2000). Sub-sub model yang
tergabung dalam konsep model perencanaan transportasi empat tahap adalah
sebagai berikut:
1. Bangkitan dan tarikan pergerakan (Trip Generation).
2. Sebaran pergerakan (Trip Distribution).
3. Pemilihan moda (Modal Split atau Mode Choice).
4. Pemilihan rute (Trip Assigment).
Bagan alir untuk pemodelan dengan konsep Model Perencanaan
Transporrtasi Empat Tahap ditunjukkan seperti pada Gambar 2.6.
Gambar 2.6 Bagan Alir Pemodelan Transportasi Empat Tahap
Sumber: Tamin, 2000.
17
Institut Teknologi Nasional
2.5.1. Bangkitan dan Tarikan Pergerakan (Trip Generation)
Bangkitan pergerakan adalah tahapan dalam pemodelan transportasi yang
memperkirakan jumlah pergerakan lalu lintas yang dibangkitkan oleh zona asal atau
origin (Oi) dan jumlah pergerakan lalu lintas yang tertarik ke setiap zona tujuan
atau destination (Dd) yang terdapat dalam suatu wilayah kajian. Bangkitan
pergerakan dapat dibagi menjadi dua, yaitu:
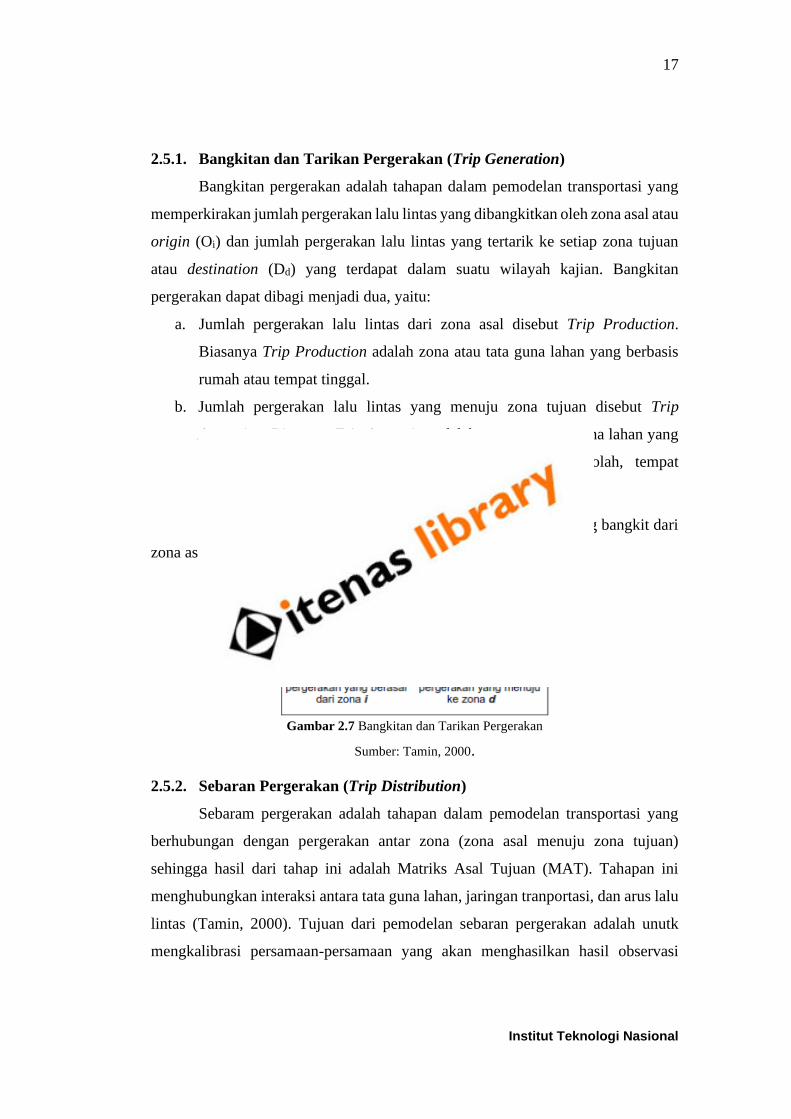
a. Jumlah pergerakan lalu lintas dari zona asal disebut Trip Production.
Biasanya Trip Production adalah zona atau tata guna lahan yang berbasis
rumah atau tempat tinggal.
b. Jumlah pergerakan lalu lintas yang menuju zona tujuan disebut Trip
Attraction. Biasanya Trip Attraction adalah zona atau tata guna lahan yang
berbasis bukan tempat tinggal seperti perkantoran, sekolah, tempat
perbelanjaan, dan sebagainya.
Gambar 2.7 menunjukkan ilustrasi pergerakan lalu lintas yang bangkit dari
zona asal dan tertarik ke zona tujuan.
Gambar 2.7 Bangkitan dan Tarikan Pergerakan
Sumber: Tamin, 2000.
2.5.2. Sebaran Pergerakan (Trip Distribution)
Sebaram pergerakan adalah tahapan dalam pemodelan transportasi yang
berhubungan dengan pergerakan antar zona (zona asal menuju zona tujuan)
sehingga hasil dari tahap ini adalah Matriks Asal Tujuan (MAT). Tahapan ini
menghubungkan interaksi antara tata guna lahan, jaringan tranportasi, dan arus lalu
lintas (Tamin, 2000). Tujuan dari pemodelan sebaran pergerakan adalah unutk
mengkalibrasi persamaan-persamaan yang akan menghasilkan hasil observasi
18
Institut Teknologi Nasional
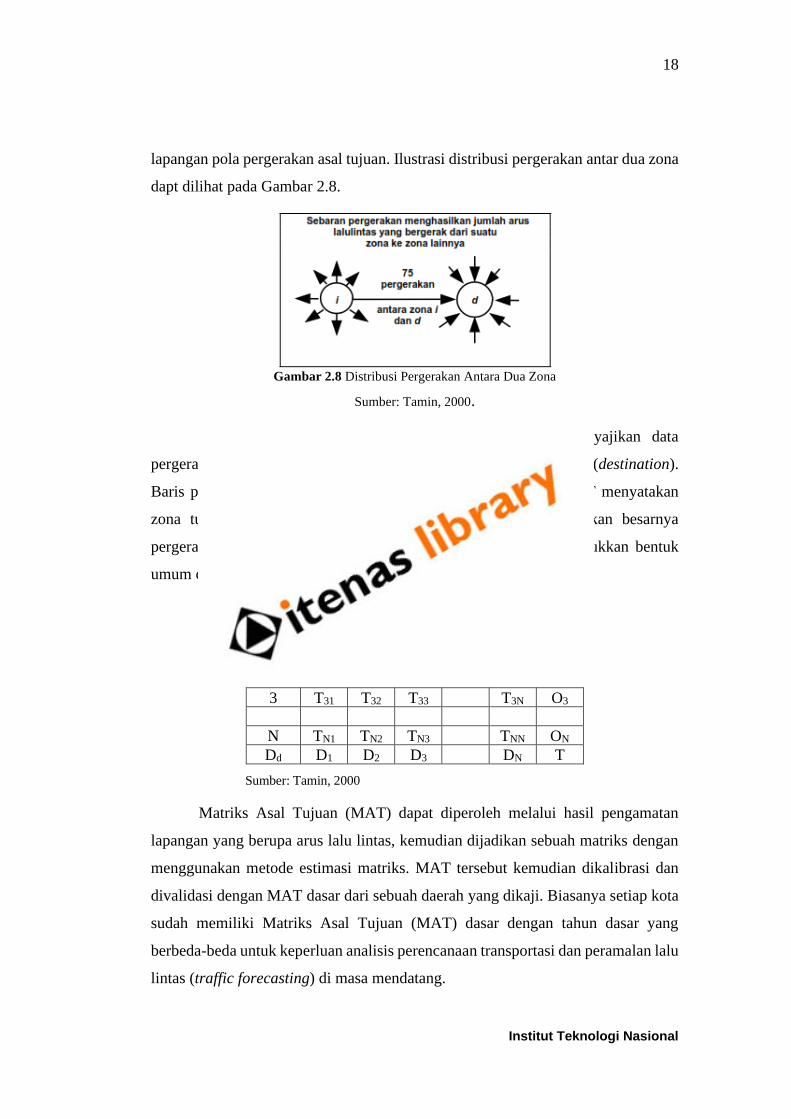
lapangan pola pergerakan asal tujuan. Ilustrasi distribusi pergerakan antar dua zona
dapt dilihat pada Gambar 2.8.
Gambar 2.8 Distribusi Pergerakan Antara Dua Zona
Sumber: Tamin, 2000.
Matriks Asal Tujuan (MAT) adalah matriks yang menyajikan data
pergerakan lalu lintas dari zona asal (origin) menuju zona tujuan (destination).
Baris pada MAT menyatakan zona asal (Oi) dan kolom pada MAT menyatakan
zona tujuan (Dd), sehingga setiap sel-sel pada MAT menunjukkan besarnya
pergerakan dari zona asal ke zona tujuan {Tid). Tabel 2.1 menunjukkan bentuk
umum dari Matriks Asal Tujuan (MAT).
Tabel 2.1
Bentuk Umum dari Matriks Asal Tujuan (MAT)
Zona 1 2 3 N Oi
1 T11 T12 T13 T1N O1
2 T21 T22 T23 T2N O2
3 T31 T32 T33 T3N O3
N TN1 TN2 TN3 TNN ON
Dd D1 D2 D3 DN T
Sumber: Tamin, 2000
Matriks Asal Tujuan (MAT) dapat diperoleh melalui hasil pengamatan
lapangan yang berupa arus lalu lintas, kemudian dijadikan sebuah matriks dengan
menggunakan metode estimasi matriks. MAT tersebut kemudian dikalibrasi dan
divalidasi dengan MAT dasar dari sebuah daerah yang dikaji. Biasanya setiap kota
sudah memiliki Matriks Asal Tujuan (MAT) dasar dengan tahun dasar yang
berbeda-beda untuk keperluan analisis perencanaan transportasi dan peramalan lalu
lintas (traffic forecasting) di masa mendatang.
19
Institut Teknologi Nasional
2.5.3. Pemilihan Moda (Moda Split/Moda Choice)
Moda transportasi terbagi menjadi dua, yaitu moda angkutan pribadi dan
moda angkutan umum. Orang yang hanya dapat memilih satu moda transportasi
saja dapat dikatakan captive terhadap moda transportasi tersebut (Tamin, 2000).
Apabila terdapat lebih dari satu pilihan moda transportasi maka pemilihan moda
umumnya bergantung pada rute yang terpendek, waktu yang tercepat, biaya yang
termurah atau kombinasi dari ketiganya. Selain itu faktor lain yang mempengaruhi
pemilihan moda adalah kenyamanan dan keselamatan halmaaa faktor ini harus turut
dipertimbangkan. Faktor yang mempengaruhi pemilihan moda dikelompokkan
menjadi 3 (tiga) bagian (Tamin, 2000), yaitu:
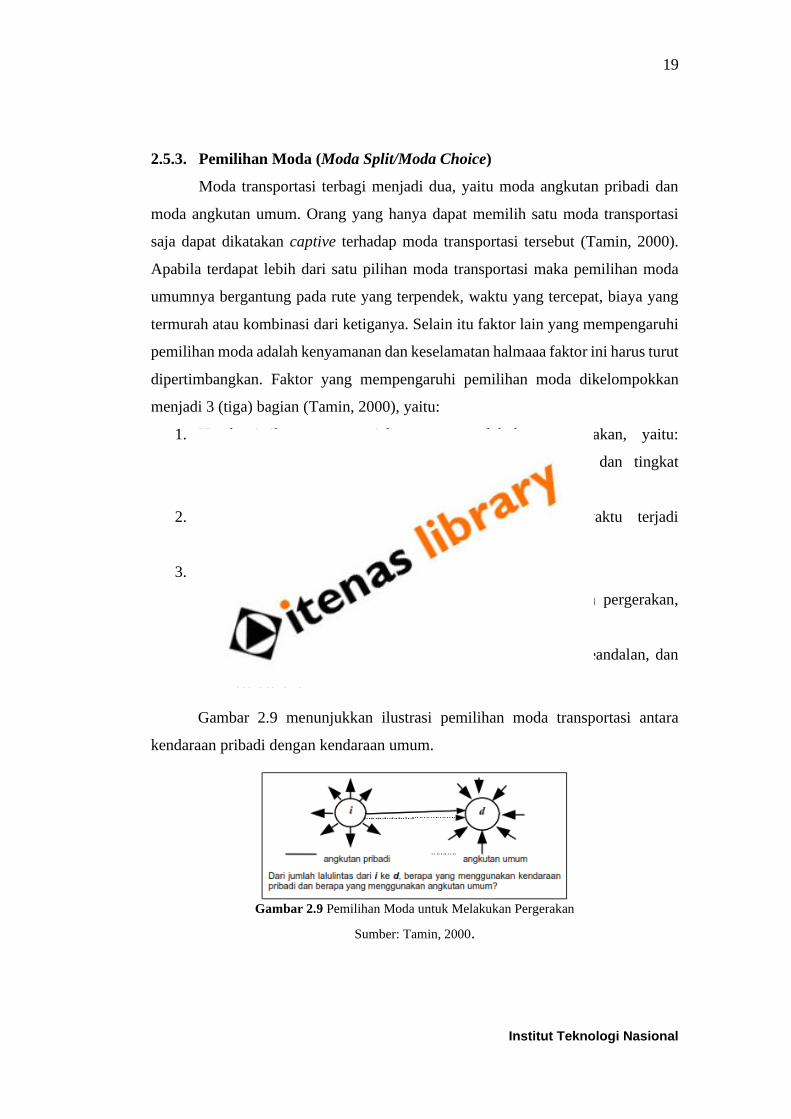
1. Karakteristik pengguna jalan yang melakukan pergerakan, yaitu:
kepemilikan kendaraan pribadi, struktur rumah tangga, dan tingkat
pendapatan.
2. Karakteristik pergerakan, yaitu: tujuan pergerakan, waktu terjadi
pergerakan, dan jarak perjalanan.
3. Karakteristik fasilitas moda transportasi, yaitu:
a. Faktor kuantitatif, antara lain waktu pergerakan, biaya pergerakan,
ketersediaan ruang, dan tarif parkir.
b. Faktor kualitatif, antara lain kenyamanan, keamanan, keandalan, dan
keteraturan.
Gambar 2.9 menunjukkan ilustrasi pemilihan moda transportasi antara
kendaraan pribadi dengan kendaraan umum.
Gambar 2.9 Pemilihan Moda untuk Melakukan Pergerakan
Sumber: Tamin, 2000.
20
Institut Teknologi Nasional
2.5.4. Pemilihan Rute (Route Choice/Trip Assignment)
Menurut Tamin (1994), Trip Assignment adalah pemilihan moda
transportasi untuk menentukan faktor-faktor yang mempengaruhi pemilihan rute
antara zona asal dan tujuan. Hal ini diperuntukkan khusus untuk kendaraan pribadi.
Untuk kendaraan pribadi, diasumsikan bahwa orang akan memilih terlebih dahulu
moda transportasinya kemudian rute perjalanannya, sedangkan untuk angkutan
umum, rute sudah ditentukan berdasarkan moda transportasi (contohnya kereta api
dan angkutan kota). Dalam kasus angkutan umum, pemilihan moda dan rute
dilakukan bersama-sama.
Sama halnya dengan pemilihan moda, pemilihan rute tergantung pada
alternatif terpendek, tercepat, dan termurah, dan juga diasumsikan bahwa pemakai
jalan mempunyai informasi yang cukup (misalnya tentang kemacetan jalan)
sehingga mereka dapat menentukan rute yang terbaik (Tamin, 2000). Ilustrasi
pemilihan rute dari zona asal ke zona tujuan terlihat seperti pada Gambar 2.10.
Gambar 2.10 Pasangan Zona Asal-Tujuan yang Mempunyai Dua Rute Alternatif
Sumber: Tamin, 2000
Pemodelan Trip Assignment bertujuan untuk memperoleh jumlah
pergerakan (arus lalu lintas) di setiap ruas jalan yang berasal dari zona asal i ke zona
tujuan d dengan menggunakan rute r (𝑇𝑖𝑑𝑟) dari jumlah total pergerakan yang
terjadi antara setiap zona asal i ke zona tujuan d (𝑇𝑖𝑑) pada jaringan jalan yang
ditinjau. Konsep pemodelan pemilihan rute sudut pandang analisis jaringan adalah
analisis kebutuhan-sediaan (demand-supply) sistem transportasi (pembebanan lalu
lintas).
Pembebanan lalu lintas adalah proses pembebanan permintaan perjalanan
yang diperoleh dari tahap sebaran pergerakan pada rute jaringan jalan yang terdiri
dari kumpulan ruas-ruas jalan. Pada tahap pembebanan rute, beberepata prinsip

21
Institut Teknologi Nasional
digunakan untuk membebankan MAT pada jaringan jalan yang akhirnya
menghasilkan informasi arus lalu lintas pada setiap ruas jalan. Tetapi, hal ini
bukanlah satu-satunya informasi. Terdapat beberapa informasi tambahan lainnya
yag bisa dihasilkan sebagaimana diuraikan berikut ini (Tamin, 2000):
1. Primer
a. Ukuran kinerja jaringan seperti arus dan keuntungan pelayanan bus.
b. Taksiran biaya (waktu) peralanan antar zoa untuk tingkat kebutuhan
pergerakan tertentu.
c. Informasi menganai arus lalulintas dan ruas jalan yang macet.
2. Sekunder
d. Taksiran rute yang digunakan oleh antar pasangan zona.
e. Analisis pasangan zona yang menggunakan ruas jalan tertentu.
f. Pola pergerakan pada persimpangan.
Model pemilihan rute dapat di klasifikasikan bedasarkan beberapa faktor
pertimbangan yang didasari pengamatan bahwa setiap pengendara dari zona asal
yang menuju zona tujuan akan memilih rute yang persis sama, khususnya di daerah
perkotaan. Hal ini disebabkan oleh adanya (Tamin, 2000):
1. Perbedaan persepsi pribadi tentang apa yang diartikan dengan biaya
perjalanan karena adanya perbedaan kepentingan atau informasi yang tidak
jelas dan tidak tepat mengenai kondisi lalulintas pada saat itu.
2. Peningkatan biaya karena adanya kemacetan pada suatu ruas jalan yang
menyebabkan kinerja beberapa rute lain menjadi lebih tinggi sehingga
meningkatkan peluang untuk memilih rute tersebut.
Beberapa ciri daerah kajian dapat digunakan untuk mengidentifikasi model
pemilihan rute yang terbaik, yaitu cara pengendara mengantisipasi biaya perjalanan,
tingkat kemacetan, dan informasi mengenai tersedianya jalan alternatif beserta
biaya perjalanannya. Setiap model mempunyai tahapan yang harus dilakukan
secara berurutan dengan fungsi dasar sebagai berikut (Tamin, 2000):

22
Institut Teknologi Nasional
1. Mengidentifikasi beberapa set rute yang akan diperkirakan menarik bagi
pengendara, dan rute ini disimpan dalam struktur data yang disebut pohon.
Oleh karena itu, tahapan ini disebut pembentukan pohon.
2. Membebankan segmen Matriks Asal Tujuan (MAT) ke jaringan jalan yang
menghasilkan volume pergerakan pada setiap ruas jalan.
3. Mencari konvergensi; beberapa teknik mengikuti pola pengulangan dari
pendekatan menuju ke solusi. Sebagai contoh, dalam proses keseimbangan
Wardrop, proses konvergensi harus selalu diamati untuk menentukan saat
penghentian proses pengulangan.
2.6. Metode Pemilihan Rute
Terdapat beberapa faktor yang mempengaruhi pemilihan rute pada saat
pengendara melakukan perjalanan. Beberapa diantaranya adalah waktu tempuh,
jarak, biaya (bahan bakar dan lainnya), kemacetan dan antrian, jenis manuver yang
dibutuhkan, jenis jalan raya (jalan tol, arteri), pemandangan, kelengkapan rambu
dan marka jalan, serta kebiasaan. Tidaklah praktis memodel semua faktor sehingga
harus digunakan beberapa asumsi atau pendekatan (Tamin, 2000). Klasifikasi
model pemilihan rute berdasarkan asumsi yang melatarbelakanginya dapat dilihat
pada Tabel 2.2.
Tabel 2.2
Klasifikasi Model Pemilihan Rute
Kriteria Efek stokastik dipertimbangkan?
Tidak Ya
Efek batasan
kapasitas
dipertimbangkan?
Tidak All or Nothing Stokastik Murni
Ya Keseimbangan
Wardrop
Keseimbangan
Pengguna Stokastik
Sumber: Tamin, 2000.
Selain pengelompokan di atas, dikenal pengelompokan lain seperti yang
diusulkan oleh Robillard (1975) (dalam Tamin, 2000), yaitu metode proporsional
dan metode tidak proporsional. Suatu metode termasuk dalam kelompok
proporsional jika:
1. Total arus pada suatu ruas jalan (hasil pembebanan) adalah penjumlahan
dari semua arus jika setiap pasangan zona dibebankan secara terpisah.

23
Institut Teknologi Nasional
2. Semua unsur MAT dikalikan dengan faktor tertentu, dan semua arus (hasil
pembebanan) pada setiap ruas jalan berubah sesuai dengan faktor yang
sama. Sebagai contoh, jika setiap sel MAT dikalikan dua, maka arus hasil
pembebanan pun akan meningkat dua kali lipat.
Proses pemilihan rute lainnya yang tidak mengikuti atau cocok dengan
kedua kondisi tersebut dikelompokkan sebagai metode tidak proporsional. Jadi,
metode all-or-nothing dan metode stokastik dikelompokkan dalam metode
proporsional, sedangkan metode batasan-kapasitas dan metode keseimbangan
adalah metode tidak proporsional.
2.6.1. Pemilihan Rute dengan Metode All-or-Nothing
Pemakai jalan secara rasional memilih rute terpendek yang meminimumkan
hambatan transportasi (jarak, waktu, dan biaya). Semua lalulintas antara zona asal
dan tujuan menggunakan rute yang sama dengan anggapan bahwa pemakai jalan
mengetahui rute yang tercepat tersebut. Dengan kata lain, pemakai jalan
mengetahui rute terpendek yang meminimumkan waktu tempuh dan semuanya
menggunakan rute tersebut, tidak ada yang menggunakan rute lain (Tamin, 2000).
Metode ini menganggap bahwa semua perjalanan dari zona asal i ke zona
tujuan d akan mengikuti rute tercepat. Dalam kasus tertentu, asumsi ini dianggap
cukup realistis, misalnya untuk daerah pinggiran kota yang jaringan jalannya tidak
begitu rapat dan yang tingkat kemacetannya tidak begitu berarti. Tetapi, asumsi ini
menjadi tidak realistis jika digunakan untuk daerah perkotaan yang sering
mengalami kemacetan (Tamin, 2000).
Meskipun demikian, model all-or-nothing masih merupakan model yang
paling sederhana dan efisien sehingga sangat sering digunakan. Dengan mengetahui
rute terbaik antarzona yang setiap pergerakannya dibebankan ke jaringan jalan
melalui rute terbaik tersebut, maka total arus untuk setiap ruas jalan bisa dihitung.
Model ini merupakan model tercepat dan termudah dan sangat berguna
untuk jaringan jalan yang tidak begitu rapat yang hanya mempunyai beberapa rute
alternatif saja. Selain itu, penggunaan metode all-or-nothing menyediakan

24
Institut Teknologi Nasional
informasi yang berharga bagi para perencana transportasi untuk menentukan arah
pembangunan jaringan jalan baru.
2.6.2. Pemilihan Rute dengan Metode User Equilibrium (UE)
Pada tahun 1952, John Glen Wardrop menyatakan prinsip pemilihan rute
yang memformalkan berbagai konsep keseimbangan (equilibrium), dan
memperkenalkan postulat perilaku alternatif dari minimalisasi total biaya
perjalanan, yaitu Keseimbangan Wardrop (Wardrop Equilibrium) atau disebut juga
Keseimbangan Pengguna (User Equilibrium). Dikutip dari (Tamin, 2000), Wardrop
(1952) menyatakan prinsip pertamanya (Prinsip Keseimbangan I Wardrop) bahwa:
“Dalam kondisi keseimbangan, lalu lintas akan mengatur dirinya
sendiri dalam jaringan yang macet sehingga tidak ada satu pun
pengendara dapat mengurangi biaya perjalanannya dengan mengubah
rute”.
Berdasarkan Prinsip Keseimbangan I Wardrop di atas, dalam kondisi
keseimbangan semua rute yang dipilih mempunyai biaya yang sama dan minimum,
sedangkan semua rute yang tidak dipilih mempunyai biaya yang sama atau lebih
besar. Sehingga dapat dikatakan bahwa sistem tersebut telah mencapai kondisi
keseimbangan menurut pandangan pengguna. Oleh karena itu, kondisi ini disebut
kondisi keseimbangan pengguna (user equilibrium). Model keseimbangan ini
dianggap sebagai salah satu model pemilihan rute yang terbaik untuk kondisi macet.
Asumsi dasar dari pemodelan keseimbangan (equilibrium) adalah masing-
masing pengendara mencoba untuk meminimumkan biaya perjalanannya. Biaya
tersebut menunjukan biaya untuk penggunaan perjalanan, selain itu biaya tersebut
untuk menunjukan generalised cost, yakni kombinasi dari waktu tempuh, jarak dan
biaya perjalanan lainnya seperti biaya parkir, terminal, transit dan lain-lain. Jika
tidak dapat memperkecil biaya tersebut, maka sistem dikatakan telah mencapai
kondisi keseimbangan (Tamin, 2000).
2.7. PTV Visum
PTV Visum merupakan sebuah perangkat lunak komputer (software) atau
aplikasi perencanaan transportasi yang digunakan untuk membuat sebuah model

25
Institut Teknologi Nasional
transportasi, analisis kondisi lalu lintas, dan forecasting yang mendukung data
berbasis GIS (Geographic Information System) dengan daerah kajian dari tingkat
kota sampai nasional. PTV Visum dikembangkan oleh PTV Planung Transport
Verkehr AG atau lebih dikenal dengan PTV Group yang bermarkas di Karlsruhe,
Jerman.
Aplikasi PTV Visum digunakan sebagai alat bantu membuat simulasi lalu
lintas atau pemodelan rekayasa lalu lintas secara makroskopik pada suatu
wilayah (macroscopic simulation).
Versi PTV Visum yang digunakan dalam penelitian ini adalah PTV Visum
2020 (SP 1-9) [153515] versi training atau student version. Pada versi training
terdapat batas waktu membuka aplikasi selama 45 menit, berbeda dengan versi full
yang tidak memiliki batasan waktu penggunaan. Sehingga apabila waktu akan
segera habis akan ada perintah untuk save file terlebih dahulu, setelah buka kembali
aplikasi dari awal dan load file yang sudah di-save untuk melanjutkan pekerjaan
sebelumnya.
2.7.1. Fungsi PTV Visum
Fungsi utama aplikasi PTV Visum ini adalah:
1. Analisis dan peramalan (forecasting) lalu lintas.
2. Pemodelan jaringan jalan.
3. Pembangkitan sub-jaringan.
4. Pemodelan berbagai sistem tranportasi, moda transportasi dan kelas
pengguna.
5. Pemodelan sisi penawaran atau demand dari PrT (Private
Transportation) dan PuT (Public Transportation) dalam jaringan
terpadu.
2.7.2. Kebutuhan Data
1. Data Geometrik Jalan:
a. Data segmen ruas jalan: panjang, lebar, jumlah lajur, tipe jalan, lebar
bahu, median, dan lain-lain.

26
Institut Teknologi Nasional
b. Data simpang: panjang simpang, gradien, dan jumlar lajur dan jalur pada
simpang, panjang kantong tikungan, dan desain kantong tikungan.
2. Data Lalu Lintas (Traffic):
a. Kecepatan arus bebas, jenis pengendalian simpang (beserta marka dan
rambu), lokasi dan renana pengaturan waktu sinyal APILL.
b. Arus atau volume kendaraan per satuan waktu dan kapasitas ruas jalan.
3. Karakteristik Kendaraan:
a. Komposisi kendaraan dan dimensi, temasuk maksimum percepatan dan
perlambatan kendaraan.
b. Pengaturan dasar kendaraan, seperti ukuran mobil penumpang, truk,
trailer, bus, dan lain-lain.
2.7.3. Prinsip Pembebanan MAT dengan Metode User Equiibirum pada
Aplikasi PTV Visum 2020
Dikutip dari PTV Visum 2020 - Manual, metode pembebanan atau
pemilihan rute yang didasarkan pada Prinsip Keseimbangan I Wardrop atau User
Equilibrium (UE) terdapat pada prosedur pembebanan equilibrium assignment.
Perhitungan kondisi kesetimbangan dapat dirumuskan sebagai masalah
optimasi dengan fungsi obyektif konveks dan kondisi sekunder linear sebagai
berikut (PTV Group, 2019):
𝑚𝑖𝑛 ∑ ∫ 𝑅𝑎(𝑥)𝑑𝑥𝑞𝑎
0𝑎∈𝐸 (2.1)
𝑞𝑖𝑗𝑟 > 0, ∀𝑖𝑗𝑟 (2.2)
∑ 𝑞𝑖𝑗𝑟 = 𝑞𝑖𝑗,𝑟 ∀𝑖𝑗 (2.3)
∑ 𝑞𝑖𝑗𝑟 = 𝑞𝑎, ∀𝑎 𝑖𝑗𝑟:𝑎∈𝑃𝑖𝑗𝑟 (2.4)
∑ 𝑞𝑎𝑎∈𝐸+𝑢
− ∑ 𝑞𝑎𝑎∈𝐸−𝑢
= ∑ 𝑞𝑖𝑢𝑖 − ∑ 𝑞𝑢𝑗𝑗 = 𝐷𝑢 − 𝑂𝑢, ∀𝑢 (2.5)
halmana:
𝐸 = himpunan semua edge dalam jaringan, dan 𝑎 salah satu edge ini,
𝑞𝑎 = volume dari objek 𝑎,
𝑅𝑎(𝑥) = impedansi objek 𝑎 dengan volume 𝑥 (meningkat secara monoton dalam
𝑥),
𝑞𝑖𝑗 = total pergerakan dari zona i ke zona j,
27
Institut Teknologi Nasional
𝑞𝑖𝑗𝑟 = volume (arus) pada rute r dari zona i ke zona j,
𝑃𝑖𝑗𝑟 = rute r dari zona i ke zona j,
𝐸+𝑢 = himpunan edge yang masuk di simpul 𝑢,
𝐸−𝑢 = himpunan edge yang keluar di simpul 𝑢,
𝐷𝑢 = lalu lintas tujuan di simpul 𝑢,
𝑂𝑢 = lalu lintas asal di simpul 𝑢.
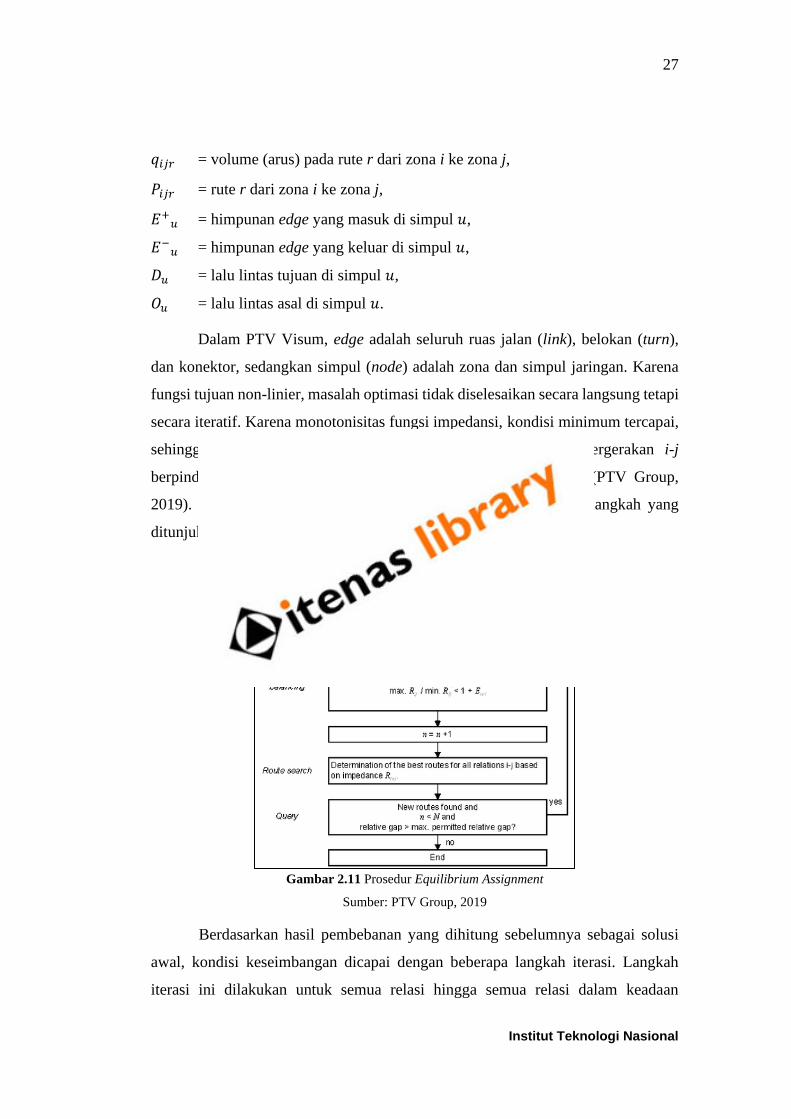
Dalam PTV Visum, edge adalah seluruh ruas jalan (link), belokan (turn),
dan konektor, sedangkan simpul (node) adalah zona dan simpul jaringan. Karena
fungsi tujuan non-linier, masalah optimasi tidak diselesaikan secara langsung tetapi
secara iteratif. Karena monotonisitas fungsi impedansi, kondisi minimum tercapai,
sehingga dimulai dengan solusi awal antara jalur alternatif, pergerakan i-j
berpindah, sehingga semua jalur memiliki impedansi yang sama (PTV Group,
2019). Selama proses equilibrium assignment, dilakukan langkah-langkah yang
ditunjukkan pada Gambar 2.11.
Gambar 2.11 Prosedur Equilibrium Assignment
Sumber: PTV Group, 2019
Berdasarkan hasil pembebanan yang dihitung sebelumnya sebagai solusi
awal, kondisi keseimbangan dicapai dengan beberapa langkah iterasi. Langkah
iterasi ini dilakukan untuk semua relasi hingga semua relasi dalam keadaan

28
Institut Teknologi Nasional
seimbang. Setiap perpindahan kendaraan dari satu rute ke rute lainnya memiliki
efek langsung pada impedansi objek jaringan yang dilintasi (PTV Group, 2019).
Prosedur penyeimbangan jaringan digambarkan pada Gambar 2.12.
Gambar 2.12 Prosedur Penyeimbangan Jaringan untuk Pasangan Asal-Tujuan Selama
Equilibrium Assignment
Sumber: PTV Group, 2019
PTV Visum mengakhiri proses iterasi untuk menghitung equilibrium, jika
salah satu dari kondisi berikut terpenuhi (PTV Group, 2019):
• Penyeimbangan jaringan telah tercapai;
• jumlah dari iterasi eksternal tertentu yang di-input tercapai tanpa
tercapainya keseimbangan jaringan;
• kriteria konvergensi maximum gap tercapai atau lebih rendah; atau
• untuk penetapan ekuilibrium dengan model blocking back, deviasi
maksimum telah tercapai atau lebih rendah.
2.7.4. Prinsip Kalibrasi MAT dengan Metode Least Square pada Aplikasi
PTV Viusm 2020
Dikutip dari PTV Visum 2020 - Manual, salah satu metode yang dapat
digunakan untuk mengkalibrasi Matriks Asal Tujuan (MAT) dalam PTV Visum

29
Institut Teknologi Nasional
2020 terdapat pada prosedur matrix correction (matrix estimation), yaitu Metode
Kuadrat Terkecil (Least Square).
Prosedur matrix correction dalam PTV Visum dimaksudkan untuk
menyesuaikan MAT, sehingga hasil pembebanan untuk model benar-benar cocok
dengan keadaan yang sesungguhnya. Matrix correction dapat bermanfaat dalam
beberapa situasi yaitu (PTV Group, 2019):
• MAT berdasarkan data survei empiris yang sudah usang dan hendak
diperbarui tanpa harus melakukan survei (asal-tujuan) baru. Pembaruan
hanya akan didasarkan pada data sensus saja.
• MAT yang dihasilkan dari model jaringan transportasi harus dikalibrasi,
oleh karena itu data arus lalu lintas yang dihitung (traffic count) harus
digunakan.
• MAT yang dihasilkan dari data yang tidak lengkap atau tidak dapat
diandalkan harus ditingkatkan dengan data arus yang lebih
komprehensif/reliabel yang dihitung secara bersamaan.
• Survei berisi distribusi jarak perjalanan, tetapi model tidak mencerminkan
data dengan tingkat akurasi yang diperlukan.
Aliran informasi Matriks Asal Tujuan (MAT) selalu mengikuti urutan yang
diberikan pada Gambar 2.13 dan alur kerja untuk kalibrasi Matriks Asal Tujuan
(MAT) ditunjukkan pada Gambar 2.14.
Gambar 2.13 Urutan Aliran Informasi MAT
Sumber: PTV Group, 2019.

30
Institut Teknologi Nasional
Gambar 2.14 Alur Kerja untuk Kalibrasi MAT
Sumber: PTV Group, 2019.
Dalam menyediakan prosedur solusi, metode Least Square meminimalkan
jarak kuadrat antara nilai pembebanan model dan nilai traffic count. Struktur dari
MAT asli dipertahankan sejauh mungkin dengan secara simultan meminimalkan
jarak kuadrat antara nilai-nilai MAT lama dan baru. Persamaan optimasi nonlinear
yang digunakan adalah sebagai berikut (PTV Group, 2019):
min �̃�(𝑓) =1
2∑ 𝜔𝑟
2(�̃�𝑟(𝑓) − 𝐶𝑟)2
+1
2∑ 𝛼𝑖𝑗
2(𝑓𝑖𝑗 − 𝑓𝑖𝑗)2
𝑖𝑗𝑟 (2.6)
halmana:
𝑓𝑖𝑗 ≥ 0 = nilai output matriks,
𝑓𝑖𝑗 ≥ 0 = nilai matriks yang dikoreksi,
�̃�𝑟(𝑓) = volume (arus) jaringan jalan r sebagai fungsi dari nilai matriks yang
dikoreksi 𝑓𝑖𝑗,
𝜔𝑟 = faktor pembebanan untuk perbedaan antara arus model dan traffic count,
𝛼𝑖𝑗 = faktor pembebanan untuk perbedaan nilai antara matriks hasil koreksi dan
matriks output,
𝐶𝑟 = nilai traffic count.
�̃�𝑟(𝑓) adalah fungsi multi-linear dan faktor-faktor linear tercantum dalam
arus matriks A, �̃�𝑟(𝑓) = ∑ 𝛼𝑟𝑖𝑗 𝑓𝑖𝑗𝑖𝑗 . Arus matriks A ditentukan sebagai:
𝛼𝑟𝑖𝑗 = ∑ 𝛿𝑟𝑘𝑉𝑘
𝑓𝑖𝑗𝑘∈Ω𝑖𝑗
(2.7)
halmana:
Ω𝑖𝑗 = jumlah jalur yang termasuk dalam relasi asal-tujuan ij,
𝛿𝑟𝑘 = 1, jika jalur k berisi objek jaringan r, jika tidak 0,
31
Institut Teknologi Nasional
𝑉𝑘 = arus pada jalur k.
2.8. Pengujian Statistik dengan Model Analisis Regresi Linear
Metode pengujian statistik yang digunkan untuk mengetahui hubungan dan
pengaruh antara arus lalu lintas eksisting dengan arus lalu lintas pada model adalah
Model Analisis Regresi Linear sesuai dengan metode default prosedur Assignment
Analysis pada PTV Visum 2020. Menurut Tamin (2000), model analisis regresi
linear adalah metode statistik yang dapat digunakan untuk mempelajari hubungan
antarsifat permasalahan yang sedang diselidiki. Model analisis regresi linear dapat
memodelkan hubungan antara dua variabel atau lebih. Persamaan umum dari
regresi linier adalah sebagai berikut:
𝑌 = 𝐴 + 𝐵𝑋 (2.8)
halmana:
𝑌 = variabel tidak bebas (variabel dependen),
𝑋 = variabel bebas (variabel independen),
𝐴 = konstanta regresi (intersep),
𝐵 = koefisien regresi.
Parameter 𝐴 dan 𝐵 dapat diperkirakan dengan menggunakan metode
kuadrat terkecil (least square) sebagai berikut:
𝐵 =𝑁 ∑ (𝑋𝑖𝑌𝑖)𝑁
𝑖=1 −∑ (𝑋𝑖)𝑁𝑖=1 ×∑ (𝑌𝑖)𝑁
𝑖=1
𝑁 ∑ (𝑋𝑖2)𝑁
𝑖=1 −[∑ (𝑋𝑖)𝑁𝑖=1 ]
2 (2.9)
𝐴 = �̅� − 𝐵�̅� (2.10)
halmana:
𝑁 = jumlah data,
�̅� = nilai rata-rata dari 𝑌𝑖,
�̅� = nilai rata-rata dari 𝑋𝑖.
Parameter uji statistik pada Model Regresi Linear yang akan digunakan
dalam penelitian ini adalah koefisien determinasi (𝑅2) dengan koefisien korelasi (𝑟)
sebagai pertimbangan tambahan. Koefisien determinasi (𝑅2) adalah koefisien yang
digunakan untuk mengetahui selisih antara variasi, atau untuk mengetahui seberapa
32
Institut Teknologi Nasional
besar pengaruh variabel bebas (𝑋) terhadap variabel tidak bebas (𝑌). Persamaan
yang digunakan untuk menghitungnya adalah sebagai berikut:
𝑅2 =∑ (�̂�𝑖−�̅�𝑖)2𝑁
𝑖=1
∑ (𝑌𝑖−�̅�𝑖)2𝑁𝑖=1
(2.11)
Koefisien determinasi juga dapat dihitung dengan mengkuadratkan
koefisien korelasi. Koefisien determinasi memiliki rentang nilai antara 0 − 1. Nilai
𝑅2 = 1 artinya variabel 𝑋 sudah bisa memberikan seluruh informasi untuk
memperkirakan variabel 𝑌 (perfect explanation). Sedangkan jika nilai 𝑅2 = 0
artinya variabel 𝑋 tidak bisa memberikan seluruh informasi untuk memperkirakan
dan mempengaruhi variabel 𝑌, atau variabel 𝑌 yang sangat terbatas (no
explanation).
Koefisien korelasi (𝑟) adalah koefisien yang digunakan untuk menetukan
hubungan (korelasi) antara variabel bebas (𝑋) dan variabel tidak bebas (𝑌).
Persamaan yang digunakan untuk menghitungnya adalah sebagai berikut:
𝑟 =𝑁 ∑ (𝑋𝑖𝑌𝑖)𝑁
𝑖=1 −∑ (𝑋𝑖)𝑁𝑖=1 ×∑ (𝑌𝑖)𝑁
𝑖=1
√[𝑁 ∑ (𝑋𝑖2)𝑁
𝑖=1 −(∑ (𝑋𝑖)𝑁𝑖=1 )
2]×[𝑁 ∑ (𝑌𝑖
2)𝑁𝑖=1 −[∑ (𝑌𝑖)𝑁
𝑖=1 ]2
]
(2.12)
Koefisien korelasi memiliki rentang nilai antara −1 ≤ 0 ≤ 1. Nilai 𝑟 = 1
artinya korelasi antara 𝑋 dan 𝑌 adalah positif, apabila nilai 𝑋 meningkat maka nilai
𝑌 juga ikut meningkat. Sebaliknya, jika nilai 𝑟 = −1 artinya korelasi antara 𝑋 dan 𝑌
adalah negatif, apabila nilai 𝑋 meningkat maka nilai 𝑌 akan menurun. Nilai 𝑟 = 0
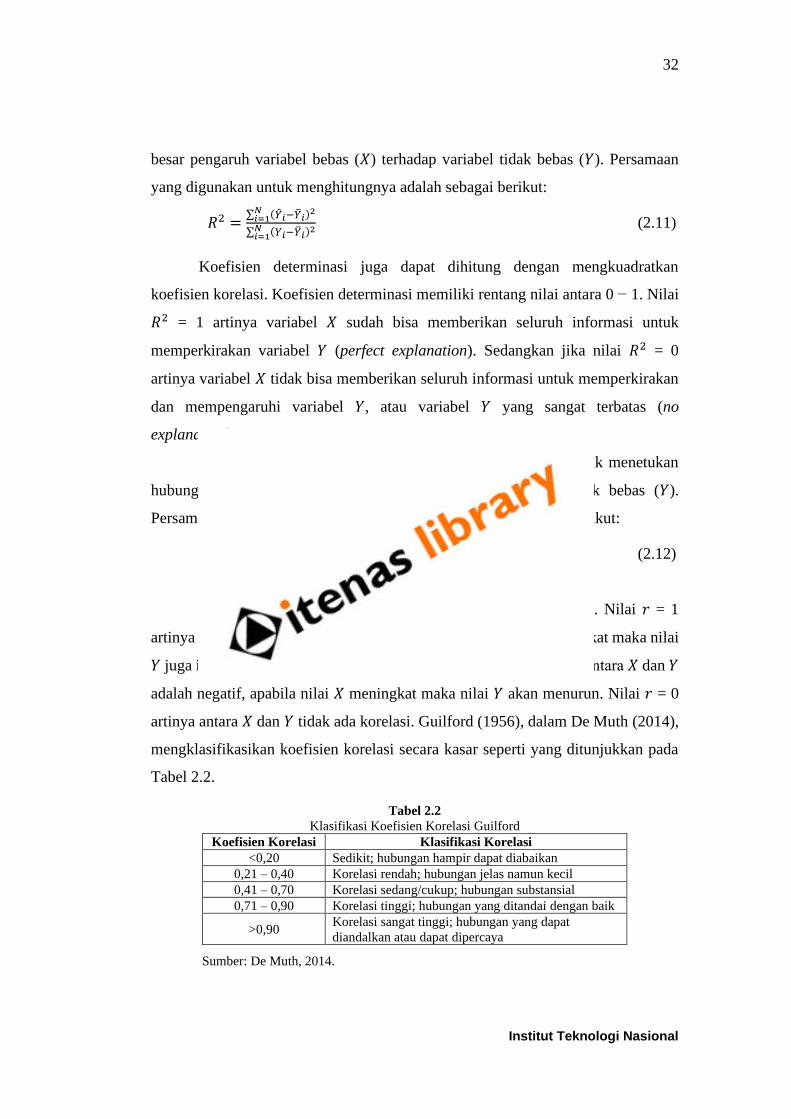
artinya antara 𝑋 dan 𝑌 tidak ada korelasi. Guilford (1956), dalam De Muth (2014),
mengklasifikasikan koefisien korelasi secara kasar seperti yang ditunjukkan pada
Tabel 2.2.
Tabel 2.2
Klasifikasi Koefisien Korelasi Guilford
Koefisien Korelasi Klasifikasi Korelasi
<0,20 Sedikit; hubungan hampir dapat diabaikan
0,21 – 0,40 Korelasi rendah; hubungan jelas namun kecil
0,41 – 0,70 Korelasi sedang/cukup; hubungan substansial
0,71 – 0,90 Korelasi tinggi; hubungan yang ditandai dengan baik
>0,90 Korelasi sangat tinggi; hubungan yang dapat
diandalkan atau dapat dipercaya
Sumber: De Muth, 2014.

33
Institut Teknologi Nasional
2.9. Kajian Terdahulu
Kajian terdahulu yang digunakan sebagai referensi tambahan dalam
penelitian adalah “Kajian Peningkatan Akurasi Matriks Asal-Tujuan yang
Dihasilkan dari Data Arus Lalulintas pada Kondisi Keseimbangan” oleh Ofyar Z.
Tamin dan Rusmadi Suyuti yang diterbitkan pada tahun 2007.
Penelitian ini mengkaji pengaruh model gravity (GR) terhadap akurasi
perkiraan MAT berdasarkan data arus lalulintas dalam kondisi pemilihan rute
keseimbangan (equilibrium assignment). Dalam kondisi tersebut nilai 𝑝𝑖𝑑𝑙
(proporsi pemilihan ruas jalan l untuk pergerakan dari zona i ke zona d) adalah
antara 0 dan 1, serta tergantung dari nilai sel-sel di dalam MAT. Sehingga penelitian
ini bertujuan untuk meninjau tingkat keakurasian MAT yang dihasilkan dari
informasi data arus lalulintas yang dipengaruhi oleh faktor-faktor:
• Metode Sebaran Pergerakan “Gravity”
• Metode Estimasi Kuadrat-Terkecil (KT), Kuadrat-Terkecil-Berbobot
(KTB), Kemiripan-Maksimum (KM), Inferensi-Bayes (IB), dan Entropi-
Maksimum (EM)
• Teknik Pemilihan Rute All-Or-Nothing dan Keseimbangan (Equilibrium
Assignment)
Hasil estimasi menunjukkan bahwa proses estimasi MAT yang mempunyai
tingkat kinerja terbaik adalah menggunakan: model batasan-bangkitan-tarikan,
fungsi hambatan Tanner, metode estimasi KTB dan pemilihan rute keseimbangan.
Hal tersebut didasarkan pada nilai hasil uji statistik dan nilai optimum dari fungsi
tujuan untuk masing-masing metode estimasi.
Metode estimasi Kuadrat Terkecil (KT) dan Kuadrat Terkecil Berbobot
(KTB) memiliki karakteristik yang serupa, demikian juga antara metode estimasi
Kemiripan Maksimum (KM) dan Inferensi Bayes (IB). Hal ini dapat disebabkan
karena pendekatan yang dilakukan dalam metode estimasi KT sama dengan KTB,
yaitu mengkalibrasi parameter yang tidak diketahui dengan meminimumkan
deviasi antara arus lalulintas pengamatan dengan arus lalulintas hasil estimasi.
Sedangkan pendekatan untuk mengkalibrasi parameter yang dilakukan dalam

34
Institut Teknologi Nasional
metode estimasi IB mirip dengan KM, yaitu didasari dengan memaksimumkan
kemiripan antara data pengamatan dengan hasil estimasinya. Kedua metode
tersebut mengasumsikan pergerakan yang terjadi mengikuti distribusi poisson.
Metode estimasi Entropi Maksimum (EM) menghasilkan pola yang berbeda karena
pendekatan yang dilakukan adalah dengan mencari peluang yang paling maksimum
yang terjadi dalam sebaran pergerakan. Tabel 2.3 menunjukkan indikator hasil uji
statistik unutk masing-masing metode estimasi.
Tabel 2.3
Indikator Uji Statistik untuk Masing-masing Metode Estimasi dengan Menggunakan Model GR
Batasan-Bangkitan-Tarikan untuk Tingkat MAT
No Indikator Uji
Statistik
GR
Kuadrat-
Terkecil
(KT)
Kuadrat-
Terkecil-
Berbobot
(KTB)
Kemiripan-
Maksimum
(KM)
Inferensi-
Bayes (IB)
Entropi-
Maksimum
(EM)
1 RMSE 4,332783 4,276519 4,278709 4,336364 4,305590
2 %RMSE [%] 72,823829 71,878158 71,914962 72,884017 72,366775
3 MAE 2,132322 2,107042 2,108776 2,133564 2,122188
4 NMAE [%] 35,839282 35,414382 35,443523 35,860168 35,668964
5 R2 0,753269 0,759635 0,759389 0,752861 0,756356
6 SR2 0,759040 0,759238 0,759388 0,758955 0,759541
Sumber: Tamin, O.Z. dan Suyuti, R., 2007
Berdasarkan tabel di atas untuk indikator uji statistik yang umum dan
sederhana, yaitu indikator koefisien determinasi (R2), dapat dilihat bahwa
keseluruhan metode menunjukkan angka yang mirip atau relatif sama, yaitu
berkisar antara 0,75 dan 0,76. Metode KTB memiliki tingkat akurasi yang lebih
tinggi jika dibandingkan dengan metode lain.
Untuk penelitian disertasi ini, jenis pemilihan rute yang ditinjau adalah
pemilihan rute all-or-nothing dan pemilihan rute keseimbangan. Asumsi dasar yang
digunakan pada pengembangan model estimasi MAT dengan menggunakan data
arus lalu lintas adalah bahwa pergerakan arus lalu lintas dari suatu zona ke zona
lainnya pada dasarnya dapat direpresentasikan pada besarnya arus lalu lintas pada
suatu ruas jalan yang sangat tergantung pada besarnya proporsi pergerakan yang
terjadi antara kedua zona tersebut yang menggunakan ruas tersebut sebagai bagian
dari rute terbaiknya. Besarnya proporsi pergerakan tersebut sangat tergantung pada
35
Institut Teknologi Nasional
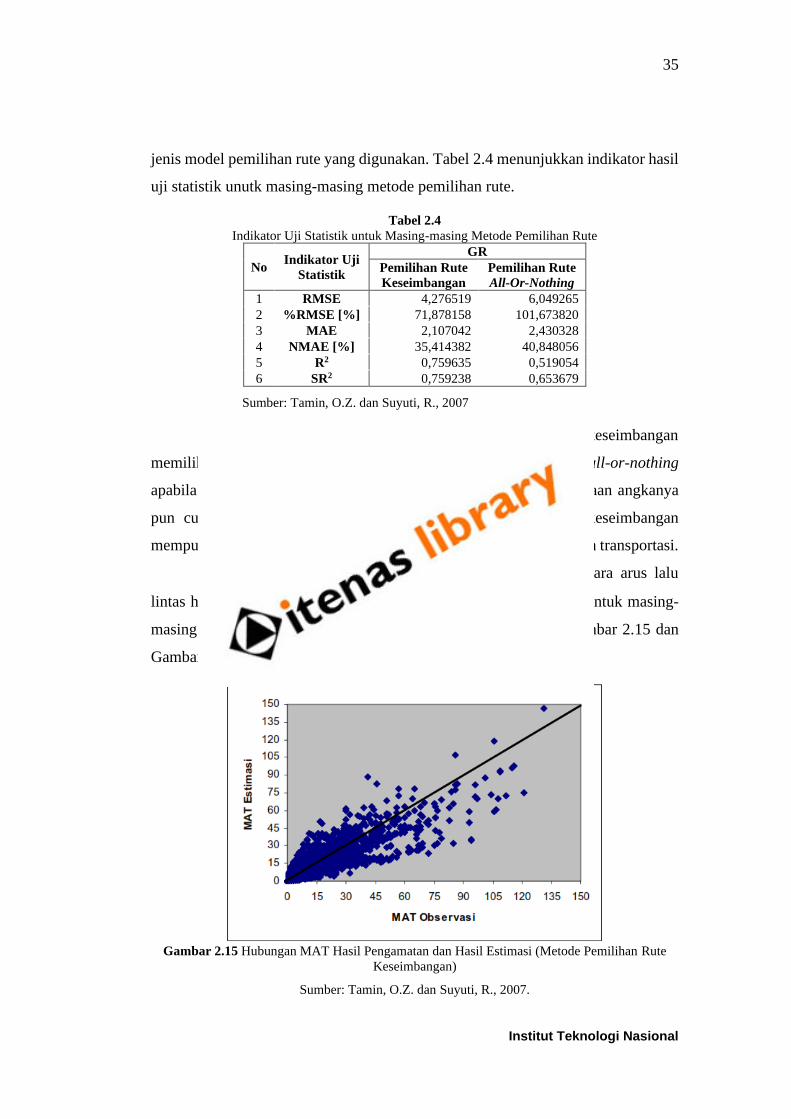
jenis model pemilihan rute yang digunakan. Tabel 2.4 menunjukkan indikator hasil
uji statistik unutk masing-masing metode pemilihan rute.
Tabel 2.4
Indikator Uji Statistik untuk Masing-masing Metode Pemilihan Rute
No Indikator Uji
Statistik
GR
Pemilihan Rute
Keseimbangan
Pemilihan Rute
All-Or-Nothing
1 RMSE 4,276519 6,049265
2 %RMSE [%] 71,878158 101,673820
3 MAE 2,107042 2,430328
4 NMAE [%] 35,414382 40,848056
5 R2 0,759635 0,519054
6 SR2 0,759238 0,653679
Sumber: Tamin, O.Z. dan Suyuti, R., 2007
Berdasarkan tabel di atas, pemilihan rute dengan metode keseimbangan
memiliki tingkat akurasi yang lebih tinggi dibandingkan metode all-or-nothing
apabila meninjau pada indikator koefisien determinasi (R2). Perbedaan angkanya
pun cukup jauh, yaitu 0,75 dan 0,51. Metode pemilihan rute keseimbangan
mempunyai pengaruh yang signifikan terhadap keakuratan pemodelan transportasi.
Secara grafis, persamaan regresi yang menghubungkan antara arus lalu
lintas hasil pengamatan (𝑉�̂�) dan arus lalu lintas hasil estimasi (𝑉𝑙) untuk masing-
masing metode pemilihan rute adalah seperti ditunjukkan pada Gambar 2.15 dan
Gambar 2.16.
Gambar 2.15 Hubungan MAT Hasil Pengamatan dan Hasil Estimasi (Metode Pemilihan Rute
Keseimbangan)
Sumber: Tamin, O.Z. dan Suyuti, R., 2007.

36
Institut Teknologi Nasional
Gambar 2.16 Hubungan MAT Hasil Pengamatan dan Hasil Estimasi (Metode Pemilihan Rute All-
Or-Nothing)
Sumber: Tamin, O.Z. dan Suyuti, R., 2007.
Dari kedua gambar di atas dapat dilihat bahwa penggunaan metode
pemilihan rute keseimbangan mempunyai pengaruh yang sangat signifikan dalam
meningkatkan tingkat keakurasian dalam estimasi parameter model kebutuhan
transportasi.