BAB II DASAR TEORI 2.1 MODUL GPS (Global Positioning …
24
7 Laporan Tugas Akhir BAB II STT Telematika Telkom Purwokerto D312036 BAB II DASAR TEORI 2.1 MODUL GPS (Global Positioning System) [2] GPS merupakan suatu sistem komunikasi yang mampu menunjukkan posisi kita berdasarkan posisi lintang dan bujur sesuai dengan data satelit. Sistem ini adalah satu-satunya sistem navigasi satelit yang berfungsi dengan baik. Sistem ini menggunakan 24 satelit yang mengirimkan sinyal gelombang mikro ke bumi. Sinyal ini diterima oleh alat penerima di permukaan dan digunakan untuk menentukan posisi, kecepatan, arah, dan waktu. Sistem ini dikembangan oleh Departemen Pertahanan Amerika Serikat, dengan nama NAVSTAR GPS. NAVSTAR adalah nama yang diberikan oleh John Wals, seorang penentu kebijakan penting dalam program GPS. Kumpulan satelit diurus oleh 50 th Space Wing, Angkatan Udara Amerika Serikat. Seseorang dapat membawa GPS untuk mengetahui keberadaan dengan akurat, juga bisa menuju kemana saja dengan menggunakan apa saja seperti berjalan, berkendara, berlayar. Pada saat ini GPS digunakan dengan beraneka ragam manfaat dan kepentingan seperti untuk navigasi, keperluan militer, pelacakan kendaraan, sistem infomasi geografis, ataupun untuk pemantauan gempa bumi. GPS Tracker atau yang sering disebut GPS Tracking merupakan sebuah teknologi AVL (Automated Vehicle Locater) di mana pengguna memungkinkan untuk melacak letak kendaraan dalam kondisi real time. GPS Tracking memanfaatkan kombinasi teknologi antara GSM dan GPS untuk menentukan sebuah obyek ataupun koordinat, kemudian menerjemahkannnya dalam bentuk peta digital. 2.1.1 Prinsip Kerja GPS [2] Satelit GPS mengelilingi bumi sebanyak 2 kali dalam sehari dan mentransmisikan informasi berupa sinyal ke bumi. GPS Receiver dapat menerima informasi ini dan menggunakan metode triangulasi untuk menghitung keberadaan pengguna. Secara umum metode yang dipakai oleh GPS Reciever untuk melakukan penghitungan keberadaan sesuatu dilakukan dengan menggunakan cara membandingkan waktu sinyal pada saat ditransmisikan dari satelit dan waktu pada saat sinyal diterima oleh
Transcript of BAB II DASAR TEORI 2.1 MODUL GPS (Global Positioning …

7
Laporan Tugas Akhir BAB II
STT Telematika Telkom Purwokerto D312036
BAB II
DASAR TEORI
2.1 MODUL GPS (Global Positioning System) [2]
GPS merupakan suatu sistem komunikasi yang mampu menunjukkan posisi
kita berdasarkan posisi lintang dan bujur sesuai dengan data satelit. Sistem ini
adalah satu-satunya sistem navigasi satelit yang berfungsi dengan baik. Sistem ini
menggunakan 24 satelit yang mengirimkan sinyal gelombang mikro ke bumi.
Sinyal ini diterima oleh alat penerima di permukaan dan digunakan untuk
menentukan posisi, kecepatan, arah, dan waktu.
Sistem ini dikembangan oleh Departemen Pertahanan Amerika Serikat, dengan
nama NAVSTAR GPS. NAVSTAR adalah nama yang diberikan oleh John Wals,
seorang penentu kebijakan penting dalam program GPS. Kumpulan satelit diurus
oleh 50th
Space Wing, Angkatan Udara Amerika Serikat.
Seseorang dapat membawa GPS untuk mengetahui keberadaan dengan akurat,
juga bisa menuju kemana saja dengan menggunakan apa saja seperti berjalan,
berkendara, berlayar. Pada saat ini GPS digunakan dengan beraneka ragam manfaat
dan kepentingan seperti untuk navigasi, keperluan militer, pelacakan kendaraan,
sistem infomasi geografis, ataupun untuk pemantauan gempa bumi.
GPS Tracker atau yang sering disebut GPS Tracking merupakan sebuah
teknologi AVL (Automated Vehicle Locater) di mana pengguna memungkinkan
untuk melacak letak kendaraan dalam kondisi real time. GPS Tracking
memanfaatkan kombinasi teknologi antara GSM dan GPS untuk menentukan
sebuah obyek ataupun koordinat, kemudian menerjemahkannnya dalam bentuk
peta digital.
2.1.1 Prinsip Kerja GPS [2]
Satelit GPS mengelilingi bumi sebanyak 2 kali dalam sehari dan
mentransmisikan informasi berupa sinyal ke bumi. GPS Receiver dapat
menerima informasi ini dan menggunakan metode triangulasi untuk
menghitung keberadaan pengguna. Secara umum metode yang dipakai oleh
GPS Reciever untuk melakukan penghitungan keberadaan sesuatu dilakukan
dengan menggunakan cara membandingkan waktu sinyal pada saat
ditransmisikan dari satelit dan waktu pada saat sinyal diterima oleh

8
Laporan Tugas Akhir BAB II
STT Telematika Telkom Purwokerto D312036
receiver. Selisih waktu yang didapat akan menggambarkan seberapa jauh
jarak antara satelit dengan GPS Receiver. Triangulasi antara berapa jarak
dengan GPS Receiver terhadap satelit yang lainnya, maka GPS Receiver
dapat menentukan letak pemakai kemudian menampilkannya pada peta
elektronik. Gambar 2.1 menunukan mode triangulasi pada sistem GPS
Gambar 2.1 : Sistem GPS[2]
Agar dapat menentukan letak pengguna, maka GPS Receiver harus
mendapatkan sinyal paling tidak dari 3 buah satelit untuk melakukan
penghitungan posisi 2 dimensi (Latitude dan Longatitude) dan deteksi
gerakan. Jika mendapatkan sinyal dari 4 buah satelit, maka receiver bisa
menentukan lokasi pemakai dalam bentuk 3 dimensi (Latitude, Longititude,
dan Altitude). Latitude adalah garis yang melintang di antara kutub utara
dan kutub selatan yang menghubungkan sisi timur dan bagian barat bumi.
Garis ini memiliki posisi membentangi bumi, sama halnya dengan garis
equator (khatulistiwa). Garis lintang inilah yang dijadikan ukuran dalam
mengukur sisi utara-selatan koordinat suatu titik di belahan bumi.
Longatitude adalah garis membujur yang menghubungkan antara sisi utara
dan sisi selatan bumi (kutub). Garis ini digunakan untuk mengukur sisi
barat-timur koordinat suatu titik di belahan bumi. Sama seperti equator pada
latitude yang berada di tengah dan memiliki nilai 0 (nol) derajat, garis
tebgah pada longatitude yang bernilai 0 (nol) derajat disebut garis prime
meridian (garis bujur), sedangkan garis yang berada paling kiri memiliki
nilai -90 derajat dan yang paling kanan memiliki nilai 90 derajat. Apabila

9
Laporan Tugas Akhir BAB II
STT Telematika Telkom Purwokerto D312036
lokasi pengguna telah didapatkan, maka unit GPS bisa melakukan
penghitungan informasi lain seperti, jejak, jarak perjalanan yang ditempuh,
jarak lokasi tujuan, kecepatan, dan sebagainya.
2.1.2 Keakuratan GPS [2]
Untuk penggunaan sipil, GPS memiliki nilai ketelitian yang cukup
luas, dari meter sampai dengan millimeter. Apabila menggunakan teknik
DGPS (Differential Global Positioning System), teknik ini memberikan
ketelitian 1-2 meter, sedangkan dengan teknik RTK (Real Time Kinematik)
menunjukan ketelitian 1-5 sentimeter. Untuk menentukan letak dengan
satuan ketelitian millimeter, dianjurkan menggunakan teknik survey GPS
dengan menggunakan peralatan GPS tipe Geodetik dual frekuensi dan
teknik pengolahan data tertentu.
Walaupun GPS adalah suatu sistem standar internasional, tetapi GPS
tetap memiliki kesalahan. Berikut adalah beberapa faktor kesalahan GPS :
1. Selecetive Availability (SA). Kesalahan GPS dikarenakan DoD
(Amerika) sebagai pemilik GPS, sengaja mengurangi keakuratan GPS
sehingga nilai ketelitiannya menurun menjadi 0-70 meter. Namun pada
tanggal 1 Janurai 2000, kebjakan SA ini resmi dihilangkan.
2. Kesalahan Efermis / Kesalahan jam receiver ataupun satelit / noise
informasi efermis (koordinat satelit) GPS tidaklah sempurna, begitu pula
dengan jam pada satelit receiver. Kesalahan Efermis menimbulkan
kekurangan akurat antara 1-5 meter pada penentuan letak, sedangkan
kesalahan jam akan menimbulkan ketidak-akuratan antara 0-1.5 meter.
Tingkat kebisingan sinyal atau noise, dapat menimbulkan
ketidakakuratan antara 0-10 meter.
3. Kondisi Atmosfer : Ionosfer dan Troposfer menimbulkan refraksi pada
sinyal GPS. Hal ini mengakibatkan kecepatan sinyal GPS menjadi
berbeda apabila dibandingkan dengan kecepatan rambatnya pada ruang
hampa. Kemudian hal ini akan berpengaruh pada hitungan jarak antara
receiver dan satelit.
10
Laporan Tugas Akhir BAB II
STT Telematika Telkom Purwokerto D312036
4. Multipath : Kesalahan ini diakibatkan karena sinyal GPS tidak merambat
langsung ke antena, tetapi terlebih awal terpantul ke berbagai objek di
sekitar pengamatan. Kesalahan yang dikarenakan Multipath secara
umum sudah dihilangkan.
2.2 GSM (GLOBAL SYSTEM MOBILE) [3]
GSM adalah generasi kedua sistem seluler dengan teknologi digital. GSM
menggunakan kartu Subscriber Identify Module (SIM Card) sebagai identitas
pelanggan, dimana pelanggan dapat bergerak secara bebas didalam area layanan
jaringan tersebut tanpa mengalami pemutusan panggilan dan mempunyai
kemampuan untuk intenationalroaming.
Sejak pertama pengimplementasikan sampai sekarang GSM telah
dikembangkan dalam tiga kelompok yaitu GSM 900, GSM 1800 dan GSM 1900.
Perbedaan ketiga kelompok tersebut adalah pada lokasi band frekuensi yang
digunakan untuk kanal transmisinya
Adapun layanan yang diberikan oleh GSM dibagi dalam 3 kategori utama
sebagai berikut :
1. Layanan telepon (Telepon Service), berupa layanan untuk suara (voice)
termasuk panggilan darurat dan faxmile. Juga untuk teleteks dan video teks
meskipun bukan merupan bagian yang terintegrasi pada GSM standar.
2. Layanan data (Data Service) berupa layanan untuk pengiriman data dengan
kecepatan pengiriman data dari 300 bps hingga 9.6 kbps.
3. Layanan tambahan (Supplementary Service) berupa pengalihan panggilan,
identifikasi pemanggil, Short Message Service(SMS) dan beberapa layanan
yang tidak dimiliki oleh sistem selular analog.
Dibawah ini adalah gambar 2.2 dari arsiktektur GSM, yang menggambarkan
proses jalannya komunikasi dari pelanggan ke pelanggan lain.

11
Laporan Tugas Akhir BAB II
STT Telematika Telkom Purwokerto D312036
Gambar 2.2 Arsiktektur GSM[3]
Pada gambar 2.2 arsiketur GSM, dapat dijelaskan bahwa :
1. Mobile System (MS)
Merupakan perangkat yang digunakan oleh pelanggan untuk melakukan
pembicaraan. Terdiri atas Mobile Equipment (ME) dan Subscriber Identity
Module (SIM).
2. Base Station Sub-system (BSS)
Terdiri atas Basestation Controller (BSC) dan Base Transceiver Station
(BTS).Basestation Controller (BSC) adalah perangkat yang mengkontrol
tiap-tiap BTS yang terhubung kepadanya dan sebagai penghubung BTS dan
MSC. BSC juga berfungsi sebagai switching lokal untuk handover antara
sejumlah BTS dan juga merupakan pengendali dari BSS.Base Transceiver
Station (BTS) adalah perangkat sistem GSM untuk berhubungan langsung
dengan MS dan juga berfungsi sebagai pengirim dan penerima sinyal.
3. Network Switching System (NSS)
Terdiri atas Mobile Switching Controller (MSC), Home Location
Register (HLR), Visit Location Register (VLR), Authentication Center
(AuC), Equipment Identity Register (EIR).
a. Mobile Switching Controller (MSC) adalah inti dari jaringan GSM yang
berfungsi untuk interkoneksi jaringan, baik antara seluler maupun dengan
jaringan Public Switched Register Network (PSTN).
b. Home Location Register (HLR) berfungsi untuk menyimpan semua data
dan informasi mengenai pelanggan yang tersimpan secara permanen,
dalam arti tidak tergantung pada posisi pelanggan. HLR bertindak
12
Laporan Tugas Akhir BAB II
STT Telematika Telkom Purwokerto D312036
sebagai pusat informasi pelanggan setiap waktu akan diperlukan oleh
VLR untuk merealisasi terjadinya komunikasi pembicaraan.
c. Visit Location Register (VLR) berfungsi untuk menyimpan data dan
informasi pelanggan, dimulai pada saat pelanggan memasuki suatu area
yang ada dalam wilayah MSC, VLR tersebut melakukan roaming.
Adanya informasi mengenai pelanggan dalam VLR memungkinkan MSC
untuk melakukan hubungan baik incoming (panggilan masuk) maupun
outgoing (panggilan keluar). VLR selalu berhubungan dengan HLR dan
memberikan informasi posisi pelanggan berada.
d. Authentication Center (AuC) berfungsi menyimpan semua informasi
yang diperlukan untuk memeriksa keabsahan pelanggan data base ini
bersifat rahasia yang disimpan dalam format kode, sehingga jika ada
pelanggan yang ingin menyadap pembicaraan bisa dicegah.
e. Equipment Identity Register (EIR) berfungsi memuat data-data status
pelanggan yang dibagi atas 3 kategori yaitu :
1) Pelanggan yang diijinkan untuk mengadakan hubungan pembicaraan
kemanapun.
2) Pelanggan yang dibatasi dan hanya diijinkan mengadakan hubungan
pembicaraan ketujuan yang terbatas.
3) Pelanggan yang sama sekali tidak diijinkan untuk berkomunikasi.
4. Operational Support System
Merupakan subsistem dari jaringan GSM yang befungsi sebagai pusat
pengendalian diantaranya adalah faultmanagement, configuration
management dan inventory management
2.2.1 PRINSIP KERJA GSM
GSM atau Global System for Mobile Communications merupakan
teknologi digital yang bekerja dengan mengirimkan paket data berdasarkan
waktu, atau yang lebih dikenal dengan istilah timeslot. GSM sendiri
merupakan turunan dari teknologi Time Division Multiple Access
(TDMA). Teknologi TDMA ini mengirimkan data berdasarkan satuan
yang terbagi atas waktu, artinya sebuah paket data GSM akan dibagi
menjadi beberapa timeslot.
13
Laporan Tugas Akhir BAB II
STT Telematika Telkom Purwokerto D312036
Timeslot inilah yang akan digunakan oleh pengguna jaringan GSM
sercara sementara. Maksud dan digunakannya timeslot secara sementara
waktu adalah timeslot ttersebut akan dimiliki oleh pengguna selama
mereka gunakan, terlepas dan mereka sedang aktif berbicara atau sedang
diam (idle)
2.3 SIM 808 GSM/GPRS & GPS[4]
SIM 808 GSM/GPRS & GPS merupakan sebuah produk yang di keluarkan
oleh perusahaan SIM Tech yang dilengkapi dengan Modul GSM/GPRS, Modul
GPS dan Modul Bluetooth pada komponen SIM 808 ini. Hal ini berarti sangat
memberikan keuntungan kepada penggunanya karena di dalam perangkat ini Modul
GSM/GPRS yang memungkinkan penggunanya untuk berkomunikasi atau
mengirimkan pesan ataupun melakukan sebuah pangillan (dial) kepada yang ingin
dituju. Selain itu Modul GPS digunakan untuk menentukan letak sesuatu yang
diinginkan. Penulis menggunakan komponen SIM 808 ini karena komponen ini
mampu mengirimkan pesan peringatan dan pemberitahuan kepad pemilik
kendaraan dan juga dapat menuntukan keberadaan kendaraan.
SIM 808 ini juga dapat diintegrasikan dengan ATmega ataupun board Arduino
sebagai pengotnrolnya. Sedangkan untuk melakukan perintah–perintah untuk
mengirimkan pesan ataupun melakukan konfigurasi pada GPS dapat menggunakan
AT Command. Untuk spesifikasi dari komponen SIM 808 dapat dilihat pada tabel
2.1. SIM 808 juga mempunyai beberapa fitur-fitur tambahan, untuk fitur tambahan
dari SIM 808 dapat dilihat pada tabel 2.2. Sedangkan untuk bentuk fisik dari
komponen SIM 808 dan layout SIM 808 dapat dilihat pada gambar 2.3 dan gambar
2.4
Tabel 2.1 : Spesifikasi SIM 808 GSM/GPRS & GPS[4]
PCB Size 24 x 24 x 2.6m
Indikator PWR, status LED, net status LED
Power Supply 3.4V – 4.4V
GPS Yes
Comunication Protocol UART

14
Laporan Tugas Akhir BAB II
STT Telematika Telkom Purwokerto D312036
Tabel 2.2 : Fitur SIM 808 [4]
NO Fitur
1 Quad-band 850/900/1800/1900MHz
2 GPRS multi-slot class 12/10
3 GPRS mobile station class B
4 Compliant to GSM phase 2/2+
5 Class 4 (2 W @ 850/900MHz)
6 Class 1 (1 W @ 1800/1900MHz)
7 Bluetooth: compliant with 3.0+EDR
8 Supports baud rate from 1200 bps to 115200bps
9 22 tracking /66 acquisition -channel
10 Control via AT commands (3GPP TS 27.007, 27.005 and SIMCOM
enhanced AT Commands)
11 Can be set by AT command
Gambar 2.3 : Komponen SIM 808[4]
15
Laporan Tugas Akhir BAB II
STT Telematika Telkom Purwokerto D312036
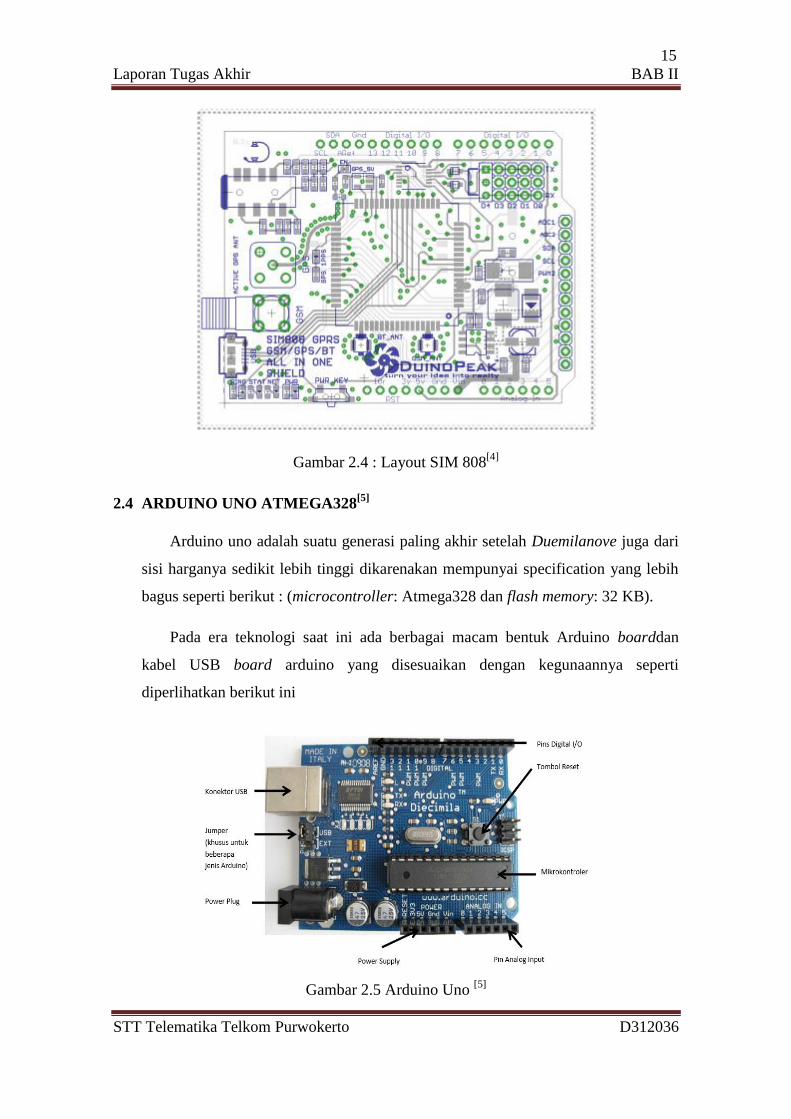
Gambar 2.4 : Layout SIM 808[4]
2.4 ARDUINO UNO ATMEGA328[5]
Arduino uno adalah suatu generasi paling akhir setelah Duemilanove juga dari
sisi harganya sedikit lebih tinggi dikarenakan mempunyai specification yang lebih
bagus seperti berikut : (microcontroller: Atmega328 dan flash memory: 32 KB).
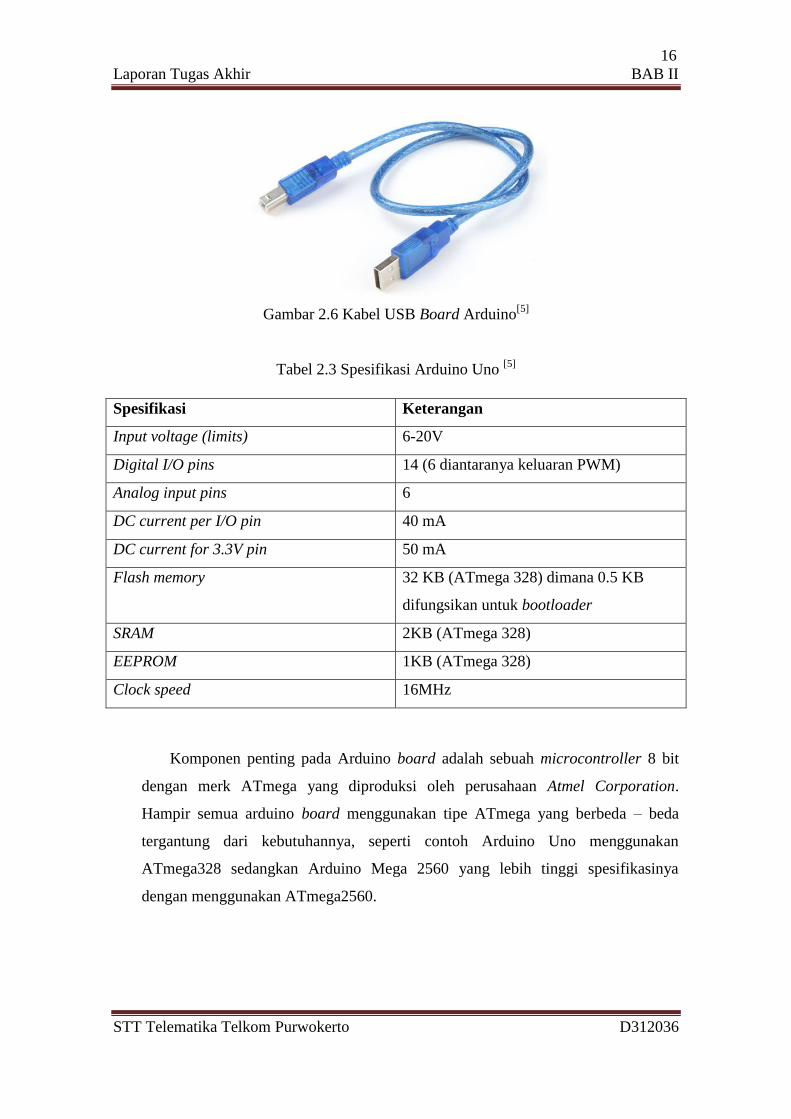
Pada era teknologi saat ini ada berbagai macam bentuk Arduino boarddan
kabel USB board arduino yang disesuaikan dengan kegunaannya seperti
diperlihatkan berikut ini
Gambar 2.5 Arduino Uno [5]
16
Laporan Tugas Akhir BAB II
STT Telematika Telkom Purwokerto D312036
Gambar 2.6 Kabel USB Board Arduino[5]
Tabel 2.3 Spesifikasi Arduino Uno [5]
Spesifikasi Keterangan
Input voltage (limits) 6-20V
Digital I/O pins 14 (6 diantaranya keluaran PWM)
Analog input pins 6
DC current per I/O pin 40 mA
DC current for 3.3V pin 50 mA
Flash memory 32 KB (ATmega 328) dimana 0.5 KB
difungsikan untuk bootloader
SRAM 2KB (ATmega 328)
EEPROM 1KB (ATmega 328)
Clock speed 16MHz
Komponen penting pada Arduino board adalah sebuah microcontroller 8 bit
dengan merk ATmega yang diproduksi oleh perusahaan Atmel Corporation.
Hampir semua arduino board menggunakan tipe ATmega yang berbeda – beda
tergantung dari kebutuhannya, seperti contoh Arduino Uno menggunakan
ATmega328 sedangkan Arduino Mega 2560 yang lebih tinggi spesifikasinya
dengan menggunakan ATmega2560.

17
Laporan Tugas Akhir BAB II
STT Telematika Telkom Purwokerto D312036
2.4.1 BAGIAN MIKROKONTROLER ATMEGA328
Untuk dapat memberikan suatu gambaran tentang apa saja yang ada
pada sebuah microcontroller, pada gambar dibawah ini ditunjukkan contoh
diagram blok sederhana pada microcontroller ATmega328, seperti gambar
2.7 berikut:
Gambar 2.7 : Blok Diagram ATMEGA328
Penjelasan dari blok – blok di atas seperti berikut :
a. Universal Asynchronous Receiver/Transmitter (UART) suatu antar
muka serial yang digunakan sebagai bagian komunikasi serial seperti
contoh RS-232, RS-422 dan RS-485.
b. 2KB RAM pada memory kerja yang sifatnya volatile (hilang ketika
daya di off kan), digunakan pada variable – variable saat dalam
program.
c. 32KB RAM flash memory sifatnya non-volatile, difungsikan untuk
penyimpanan suatu program yang dibuat dari komputer. Selain program
flash memory juga menyimpan bootloader. Bootloader ini adalah
program inisiasi dimana ukurannya kecil, yang dijalankan melalui CPU
pada saat daya dihidupkan. Setelah bootloader selesai dijalankan, dan
dilanjutkan pada program yang ada pada RAM akan dieksekusi.
UART (antar muka serial)
2KB RAM
(Memory
kerja)
32KB RAM
Flash
Memory
(program)
1KB
EPROM
Port input/output
CPU
18
Laporan Tugas Akhir BAB II
STT Telematika Telkom Purwokerto D312036
d. 1KB EEPROM bersifat non-volatile, difungsikan sebagai penyimpan
data yang tidak boleh hilang saat daya dimatikan. Tidak dipakai pada
Arduino board.
e. Central Processing Unit (CPU), bagian dari microcontroller agar dapat
menjalankan berbagai perintah dari suatu program.
f. Port input / output, pin – pin ini digunakan menerima suatu data (input)
digital atau analog, dan mengeluarkan data (output) digital ataupun
analog.
Pada board Arduino Uno mikrokontroler yang digunakan adalah
mikrokontroler Atmega 328. Mikrokontroler Atmega 328 itu dibuatan dari
Atmel berbasis arsitektur Reduced Instruction Set Computer (RISC), hampir
semua instruksi dieksekusi dalam satu siklus clock.
Arsitektur Atmega 328 sebagai berikut :
1. Advanced RISC architecture
a. 131 powerfull instructions – most single clock cycle execution
b. 32 x 8 general purpose working registers
c. Fully static operation
d. Up to 20 MIPS through put at 20 MHz
e. On-chip 2 cycle multipair
2. High endurance non-volatile memory segments
a. 4/8/16/32K bytes of in-system self-programmable flash program
memory
b. 256/512/512/1K bytes EEPROM
c. 512/1K/1K/2K bytes internal SRAM
d. Write/Erase Cycles : 10.000 flash/100.000 EEPROM
e. Data retention : 20 years at 85oC/100 years at 25
oC
f. Opsional bagian kode boot dengan independen kunci bit dalam sistem
pemrograman dengan on-chip program boot yang benar-baca
sementara-menulis operasi.
g. Kunci pemrograman untuk perangkat lunak keamanan.
3. Peripheral features

19
Laporan Tugas Akhir BAB II
STT Telematika Telkom Purwokerto D312036
a. Two 8-bit timer / counter dengan prescaler terpisah dan dibandingkan
mode nya.
b. One 16-bit timer/counter dengan prescaler terpisah, dibandingkan
mode dan menangkap mode.
c. Real time counter dengan separate oscillator.
d. Six PWM channels.
e. 8-channels 10-bit ADC in TQFP and QFN/MLF paket pengukuran
suhu.
f. 6-channels 10-bit ADC in PDIP paket pengukuran suhu.
g. Programmable serial USART.
h. Master/slave SPI serial interface.
i. Byte – oriented 2-wire serial interface (Philps 12C compatible).
j. Programmable watchdog timer dengan separate on-chip oscillator.
k. On-chip analog comparator.
l. Interrupt and wake-up pin change.
4. Spesial fitur mikrokontroller
a. Power-on reset and programmable brown-out detection
b. Internal calibrated oscillator
c. External and internal interrupt sources
d. Six sleep modes : idle, ADC noise reduction, power-save, power-
down, standby, and extended standby.
5. I/O and packages
a. 23 programmable I/O lines
b. 28-pin PDIP, 32-lead TQFP, 28-pad QFN/MLF and 32-pad
QFN/MLF
6. Operating voltage
a. 1.8 – 5.5 V
7. Temperature range
a. - 40oC to 85
oC
8. Speed grade
a. 0-20 MHz @1.8-5.5V
9. Low power consumption at 1 MHz, 1.8V, 25oC

20
Laporan Tugas Akhir BAB II
STT Telematika Telkom Purwokerto D312036
a. Active mode : 0.2 mA
b. Power-down mode : 0.1 µA
c. Power-save mode : 0,75 µA (including 32 KHz RTC)[3]
2.4.2 BAGIAN-BAGIAN ARDUINO BOARD
Bagian – bagian dari board arduino dapat di lihat pada gambar 2.8
berikut ini :
Gambar 2.8 : Bagian dari Auduino Board
Penjelasan dari bagian – bagian Arduino Uno seperti berikut :
a. 14 pin input / output digital (0-13) sebagai input atau output, dapat
diatur oleh program. Khusus untuk 6 buah pin 3, 5, 6, 9, 10 dan 11,
serta juga berfungsi sebagai pin analog output dimana tegangan output-
nya dapat diatur. Nilai sebuah pin output analog dapat diprogram antara
0 – 255, dimana hal itu mewakili nilai tegangan 0 – 5V.
b. USB sebagai media transfer program dari komputer ke dalam board,
komunikasi serial antara papan dan computer, memberi daya listrik
untuk board.
c. 6 pin input analog (0-5) pin ini sangat berguna untuk membaca
tegangan yang dihasilkan oleh sensor analog, seperti sensor suhu.
Program dapat membaca nilai sebuah pin input antara 0 – 1023, dimana
hal itu mewakili nilai tegangan 0 – 5V.
d. Q1 – Kristal (quartz crystal oscillator) jika microcontroller dianggap
sebagai sebuah otak, maka kristal adalah jantung-nya karena komponen
ini menghasilkan detak-detak yang dikirim kepada microcontroller agar

21
Laporan Tugas Akhir BAB II
STT Telematika Telkom Purwokerto D312036
melakukan sebuah operasi untuk setiap detak-nya. Kristal ini dipilih
yang berdetak 16 juta kali per detik (16MHz).
e. In-Circuit Serial Programming (ICSP), Port ICSP memungkinkan
pengguna untuk memprogram microcontroller secara langsung, tanpa
melalui bootloader. Umumnya pengguna arduino tidak melakukan ini
sehingga ICSP tidak terlalu dipakai walaupun disediakan.
f. Sambungan SV1 sebagai sambungan atau jumper untuk memilih
sumber daya board, apakah dari sumber eksternal atau menggunakan
USB. Sambungan ini tidak diperlukan lagi pada arduino board versi
terakhir karena pemilihan sumber daya eksternal atau USB dilakukan
secara otomatis.
g. Tombol Reset S1 untuk me-reset board sehingga program akan mulai
lagi dari awal. Perhatikan bahwa tombol reset ini bukan untuk
menghapus program atau mengosongkan microcontroller.
h. IC 1 – Microcontroller Atmega komponen utama dari arduino board, di
dalamnya terdapat CPU, ROM dan RAM.
i. X1 – sumber daya eksternal jika akan disuplai dengan sumber daya
eksternal, arduino board dapat diberikan tegangan DC antara 9-12V.
2.4.3 CATU DAYA
Arduino Uno dapat diaktifkan melalui koneksi USB atau dengan catu
daya eksternal. Sumber listrik dipilih secara otomatis. Eksternal (non-
USB) daya dapat datang baik dari AC-DC adaptor atau baterai. Adaptor ini
dapat dihubungkan dengan cara menghubungkannya plug pusat-positif
2.1mm ke dalam board colokan listrik. Lead dari baterai dapat dimasukkan
ke dalam header pin Gnd dan Vin dari konektor Power.
Board dapat beroperasi pada pasokan daya dari 6 – 20 V. Jika diberikan
dengan kurang dari 7V, bagaimanapun, pin 5V dapat menyuplai kurang dari
5V dan board mungkin tidak stabil. Jika menggunakan lebih dari 12V,
regulator tegangan bisa panas dan merusak board. Rentang yang dianjurkan
adalah 7 – 12 V. Pin catu daya adalah sebagai berikut[8]
:

22
Laporan Tugas Akhir BAB II
STT Telematika Telkom Purwokerto D312036
1. VIN. Tegangan input ke board Arduino ketika menggunakan sumber
daya eksternal (sebagai lawan dari 5V dari koneksi USB atau sumber
daya lainnya diatur).
2. 5V. Catu daya diatur digunakan untuk daya mikrokontroler dan
komponen lainnya di board. Hal ini dapat terjadi baik dari VIN
melalui regulator on-board, atau diberikan oleh USB.
3. 3,3V pasokan yang dihasilkan oleh regulator on-board. Arus
maksimum adalah 50 mA.
4. GND adalah pin ground.
2.4.4 INPUT DAN OUTPUT [5].
Masing-masing dari 14 pin digital pada Arduino dapat digunakan
sebagai input atau output, menggunakan fungsi pinMode(), digitalWrite(),
dan digitalRead(). Masing-masing beroperasi di 5V. Setiap pin dapat
memberikan atau menerima maksimum 40 mA dan memiliki resistor pull-
up internal dari 20-50 KΩ. Selain itu, beberapa pin memiliki fungsi khusus :
1. Serial: 0 (RX) dan 1 (TX). Digunakan untuk menerima (RX) dan
mengirimkan (TX) data TTL serial. Pin ini terhubung ke pin yang
sesuai dari chip Atmega328 USB-to-Serial TTL
2. Eksternal Interupsi: 2 dan 3. Pin ini dapat dikonfigurasi untuk memicu
interupsi pada nilai yang rendah, tepi naik atau jatuh, atau perubahan
nilai PWM: 3, 5, 6, 9, 10, dan 11. Menyediakan 8-bit output PWM
dengan analogWrite() fungsi.
3. SPI: 10 (SS), 11 (mosi), 12 (MISO), 13 (SCK). Pin ini mendukung
komunikasi SPI menggunakan perpustakaan SPI.
4. LED:13. Ada built-in LED terhubung ke pin digital 13. Ketika pin
adalah nilai tinggi, LED menyala, ketika pin adalah rendah, itu off.
Arduino Uno memiliki 6 input analog, diberi label A0 melalui A5,
masing-masing menyediakan 10 bit resolusi yaitu 1024 nilai yang berbeda.
Secara defaultsystem mengukur dari tanah sampai 5V.
1. TWI:A4 atau SDA pin dan A5 atau SCL pin. Mendukung komunikasi
TWI.

23
Laporan Tugas Akhir BAB II
STT Telematika Telkom Purwokerto D312036
2. Aref. Referensi tegangan untuk input analog. Digunakan dengan
analogReference().
3. Reset.
2.5 AT Command [6]
AT Command adalah suatu perintah yang dapat dikirim oleh suatu terminal
atau komputer untuk mengendalikan ISU (Individual Subscriber Unit) dalam
Command Mode. AT Command pada dasarnya hampir serupa dengan perintah
Prompt yang terdapat pada komputer. Namun, perintah – perintah AT Command
dipakai untuk komunikasi serial port. Perintah yang dipakai untuk melakukan
penulisan ke port komputer diawali dengan kata AT, lalu diikuti karakter lainnya
yang memiliki fungsi tersendiri. Dengan menggunakan AT Command, pengguna
dapat memperoleh informasi seperti kekuatan sinyal, membaca pesan yang terdapat
pada SIM Card, mengirim pesan, menghapus pesan pada SIM Card, serta masih
banyak lagi kegunaannya. AT Command juga bisa dipakai untuk melakukan
penulisan ke Modem GSM.
Untuk melakukan penulisan data ke Modem GSM, Modem GSM harus terlebih
dahulu disambungkan dengan kabel data yang tersedia pada serial port yang ada di
komputer. Tabel 2.3 adalah beberapa contoh perintah AT Command yang dapat
digunakan.
24
Laporan Tugas Akhir BAB II
STT Telematika Telkom Purwokerto D312036
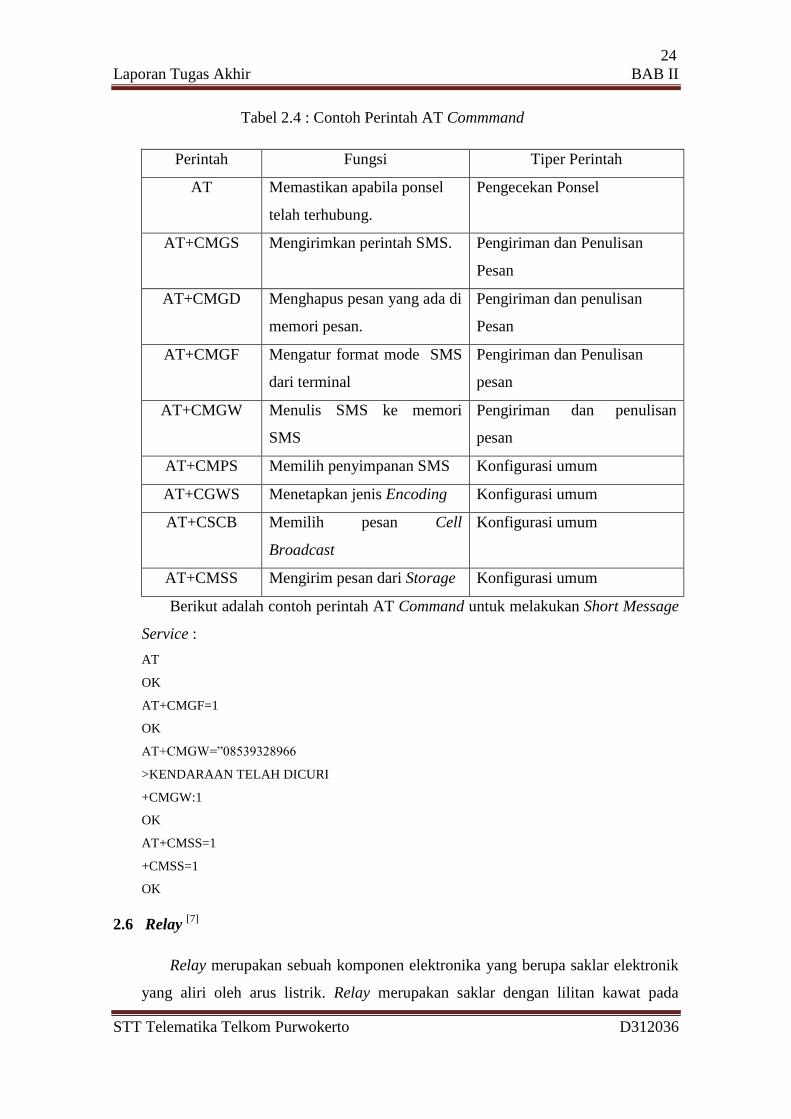
Tabel 2.4 : Contoh Perintah AT Commmand
Perintah Fungsi Tiper Perintah
AT Memastikan apabila ponsel
telah terhubung.
Pengecekan Ponsel
AT+CMGS Mengirimkan perintah SMS. Pengiriman dan Penulisan
Pesan
AT+CMGD Menghapus pesan yang ada di
memori pesan.
Pengiriman dan penulisan
Pesan
AT+CMGF Mengatur format mode SMS
dari terminal
Pengiriman dan Penulisan
pesan
AT+CMGW Menulis SMS ke memori
SMS
Pengiriman dan penulisan
pesan
AT+CMPS Memilih penyimpanan SMS Konfigurasi umum
AT+CGWS Menetapkan jenis Encoding Konfigurasi umum
AT+CSCB Memilih pesan Cell
Broadcast
Konfigurasi umum
AT+CMSS Mengirim pesan dari Storage Konfigurasi umum
Berikut adalah contoh perintah AT Command untuk melakukan Short Message
Service :
AT
OK
AT+CMGF=1
OK
AT+CMGW=”08539328966
>KENDARAAN TELAH DICURI
+CMGW:1
OK
AT+CMSS=1
+CMSS=1
OK
2.6 Relay [7]
Relay merupakan sebuah komponen elektronika yang berupa saklar elektronik
yang aliri oleh arus listrik. Relay merupakan saklar dengan lilitan kawat pada

25
Laporan Tugas Akhir BAB II
STT Telematika Telkom Purwokerto D312036
batang besi (solenoid) yang berada di sekitarnya. Ketika solenoid dialiri oleh arus
listrik, maka akan terjadi tarik menarik karena adanya gaya magnet di sektitar
solenoid. Gambar 2.9 menunjukan prinsip kerja dari relay.
Gambar 2.9 : Prinsip Kerja Relay [7]
Relay terdiri dari coil dan contact. Coil adalah gulungan kawat yang telah
mendapatkan arus listrik, sedangkan contact adalah sejenis saklar yang kegunaanya
tergantung dari ada atau tidaknya arus listrik yang ada pada coil. Relay memiliki 2
terminal trigger, 1 terminal input, dan 1 terminal output yang di mana :
1. Terminal trigger : adalah terminal yang akan mengaktifkan Relay. Sama
dengan komponen yang lainnya, yang akan aktif jika mendapat arus +.
2. Terminal input : adalah terminal yang digunakan untuk memberi masukan.
3. Terminal output : adalah tempat dimana keluaran output
Konfigurasi dari kontak relay ada tiga jenis seperti di tunjukan pada Gambar
2.8, yaitu :
1. Normally Open (NO) : Relay terbuka jika tidak dialiri arus listrik
2. Normally Close (NC) : Relay tertutup jika dialiri dengan arus listrik.
3. Change Over (CO) : Relay memiliki kontak tengah yang tertutup normal.
Apabila relay dicatu dengan kontak tengah tersebut, maka akan terjadi
hubungan dengan kontak yang lainnya. Gambar 2.10 menunjukan relay 5 Volt
8 pin.
.
Gambar 2.10 : Relay 5 Volt 8 Pin [7]
26
Laporan Tugas Akhir BAB II
STT Telematika Telkom Purwokerto D312036
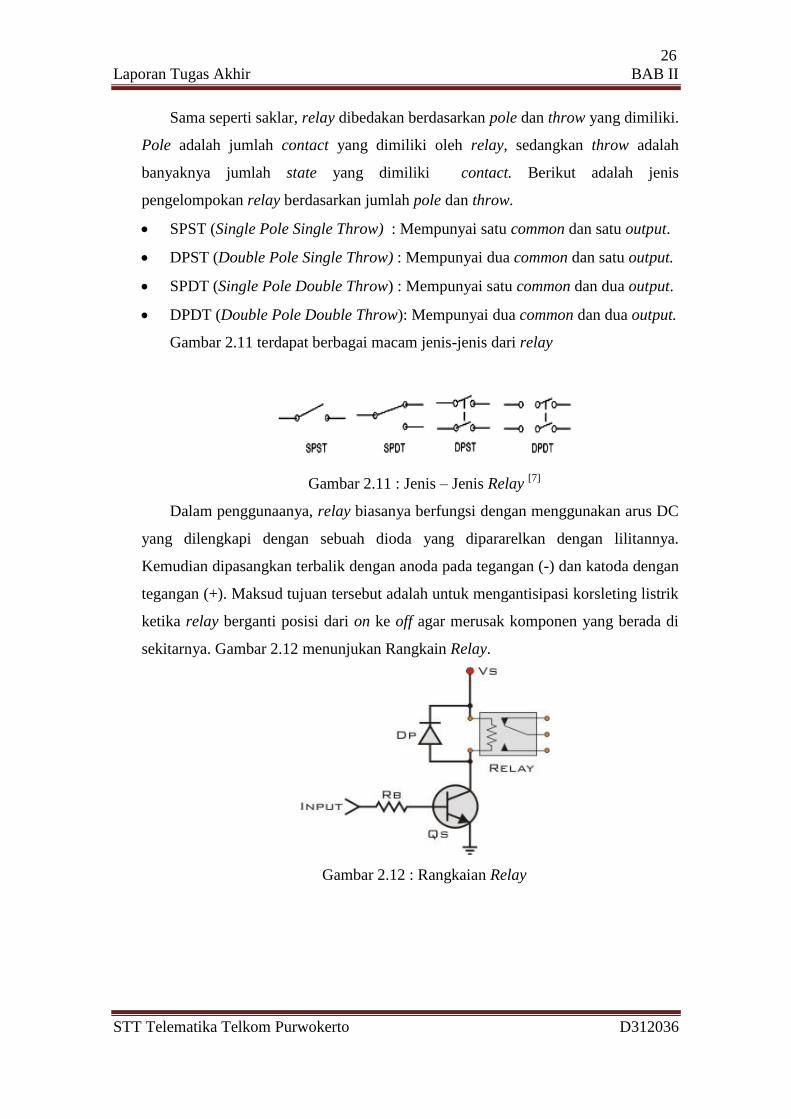
Sama seperti saklar, relay dibedakan berdasarkan pole dan throw yang dimiliki.
Pole adalah jumlah contact yang dimiliki oleh relay, sedangkan throw adalah
banyaknya jumlah state yang dimiliki contact. Berikut adalah jenis
pengelompokan relay berdasarkan jumlah pole dan throw.
SPST (Single Pole Single Throw) : Mempunyai satu common dan satu output.
DPST (Double Pole Single Throw) : Mempunyai dua common dan satu output.
SPDT (Single Pole Double Throw) : Mempunyai satu common dan dua output.
DPDT (Double Pole Double Throw): Mempunyai dua common dan dua output.
Gambar 2.11 terdapat berbagai macam jenis-jenis dari relay
Gambar 2.11 : Jenis – Jenis Relay [7]
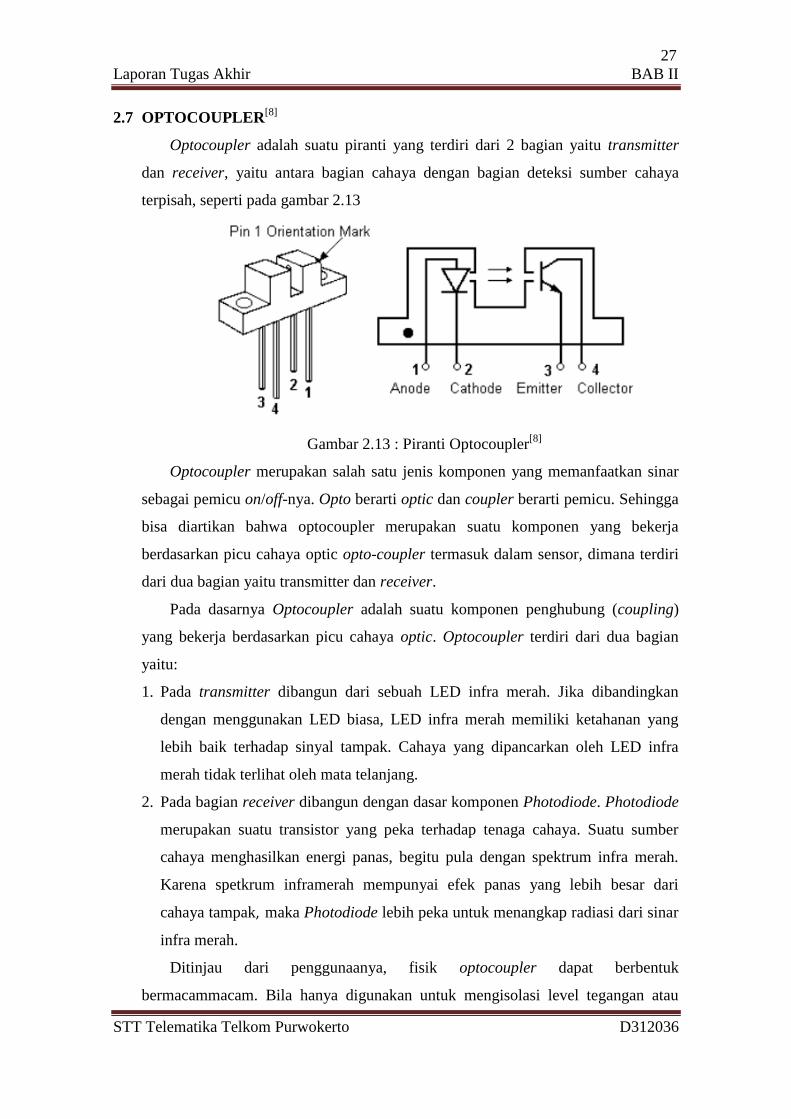
Dalam penggunaanya, relay biasanya berfungsi dengan menggunakan arus DC
yang dilengkapi dengan sebuah dioda yang dipararelkan dengan lilitannya.
Kemudian dipasangkan terbalik dengan anoda pada tegangan (-) dan katoda dengan
tegangan (+). Maksud tujuan tersebut adalah untuk mengantisipasi korsleting listrik
ketika relay berganti posisi dari on ke off agar merusak komponen yang berada di
sekitarnya. Gambar 2.12 menunjukan Rangkain Relay.
Gambar 2.12 : Rangkaian Relay
27
Laporan Tugas Akhir BAB II
STT Telematika Telkom Purwokerto D312036
2.7 OPTOCOUPLER[8]
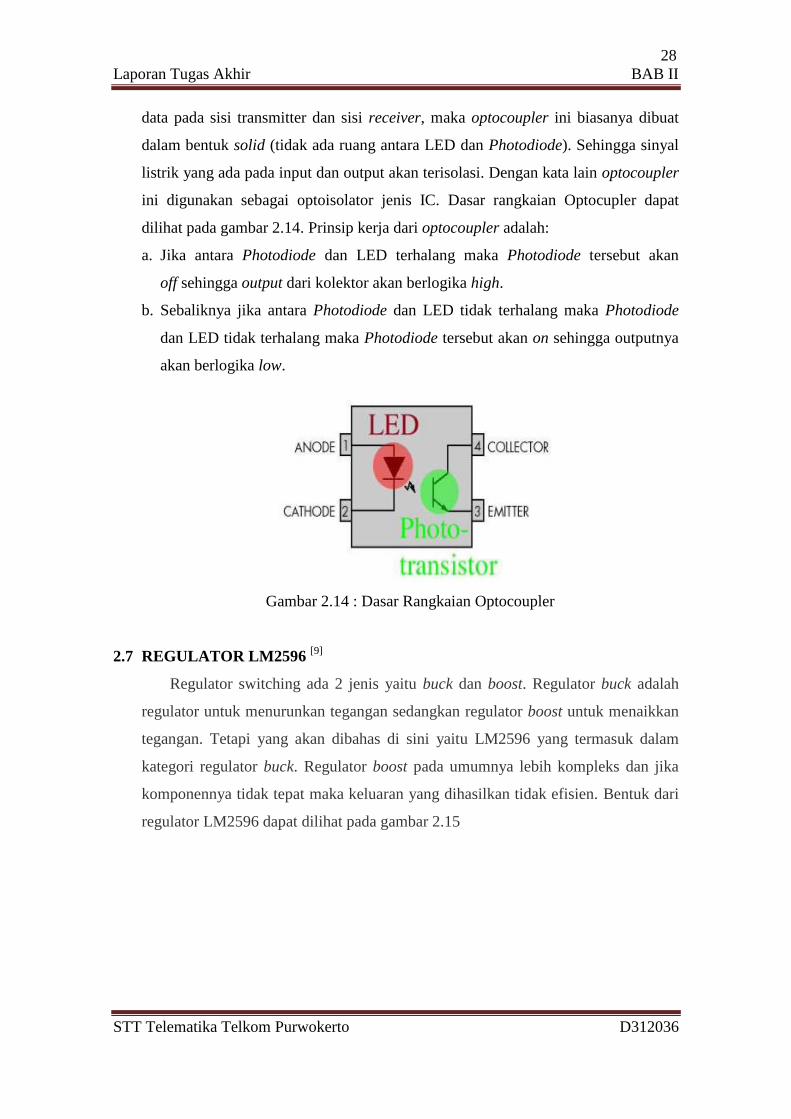
Optocoupler adalah suatu piranti yang terdiri dari 2 bagian yaitu transmitter
dan receiver, yaitu antara bagian cahaya dengan bagian deteksi sumber cahaya
terpisah, seperti pada gambar 2.13
Gambar 2.13 : Piranti Optocoupler[8]
Optocoupler merupakan salah satu jenis komponen yang memanfaatkan sinar
sebagai pemicu on/off-nya. Opto berarti optic dan coupler berarti pemicu. Sehingga
bisa diartikan bahwa optocoupler merupakan suatu komponen yang bekerja
berdasarkan picu cahaya optic opto-coupler termasuk dalam sensor, dimana terdiri
dari dua bagian yaitu transmitter dan receiver.
Pada dasarnya Optocoupler adalah suatu komponen penghubung (coupling)
yang bekerja berdasarkan picu cahaya optic. Optocoupler terdiri dari dua bagian
yaitu:
1. Pada transmitter dibangun dari sebuah LED infra merah. Jika dibandingkan
dengan menggunakan LED biasa, LED infra merah memiliki ketahanan yang
lebih baik terhadap sinyal tampak. Cahaya yang dipancarkan oleh LED infra
merah tidak terlihat oleh mata telanjang.
2. Pada bagian receiver dibangun dengan dasar komponen Photodiode. Photodiode
merupakan suatu transistor yang peka terhadap tenaga cahaya. Suatu sumber
cahaya menghasilkan energi panas, begitu pula dengan spektrum infra merah.
Karena spetkrum inframerah mempunyai efek panas yang lebih besar dari
cahaya tampak, maka Photodiode lebih peka untuk menangkap radiasi dari sinar
infra merah.
Ditinjau dari penggunaanya, fisik optocoupler dapat berbentuk
bermacammacam. Bila hanya digunakan untuk mengisolasi level tegangan atau
28
Laporan Tugas Akhir BAB II
STT Telematika Telkom Purwokerto D312036
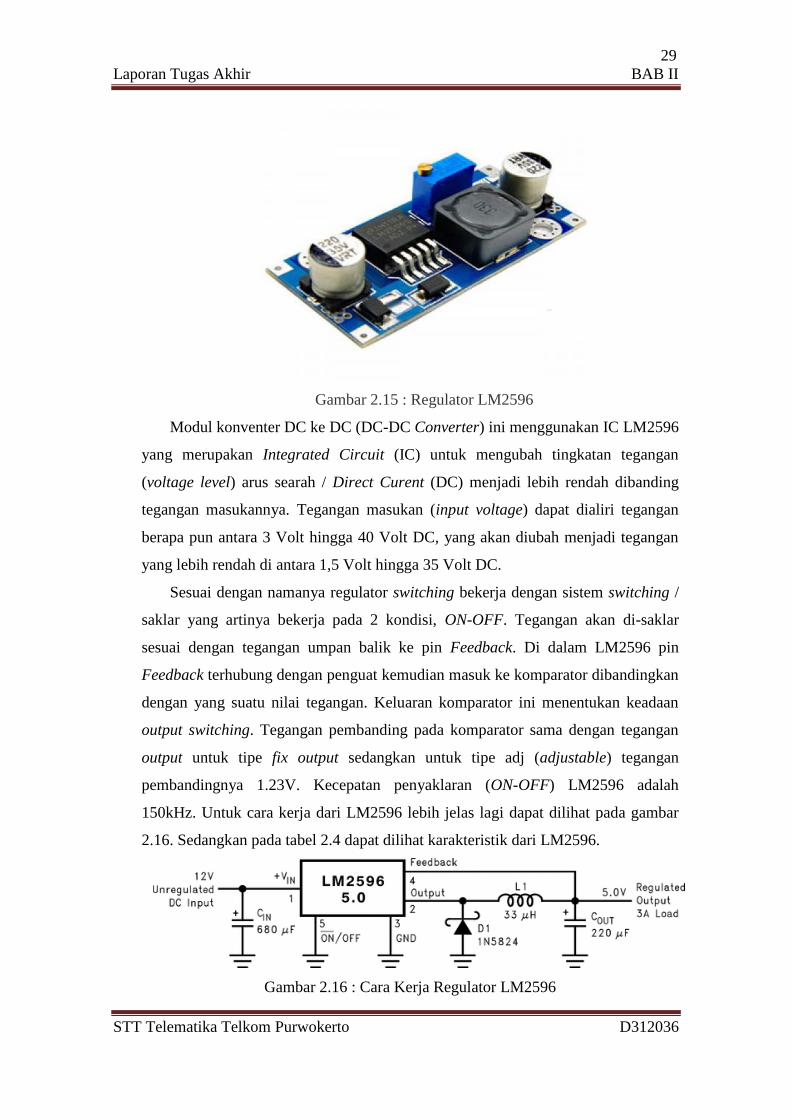
data pada sisi transmitter dan sisi receiver, maka optocoupler ini biasanya dibuat
dalam bentuk solid (tidak ada ruang antara LED dan Photodiode). Sehingga sinyal
listrik yang ada pada input dan output akan terisolasi. Dengan kata lain optocoupler
ini digunakan sebagai optoisolator jenis IC. Dasar rangkaian Optocupler dapat
dilihat pada gambar 2.14. Prinsip kerja dari optocoupler adalah:
a. Jika antara Photodiode dan LED terhalang maka Photodiode tersebut akan
off sehingga output dari kolektor akan berlogika high.
b. Sebaliknya jika antara Photodiode dan LED tidak terhalang maka Photodiode
dan LED tidak terhalang maka Photodiode tersebut akan on sehingga outputnya
akan berlogika low.
Gambar 2.14 : Dasar Rangkaian Optocoupler
2.7 REGULATOR LM2596 [9]
Regulator switching ada 2 jenis yaitu buck dan boost. Regulator buck adalah
regulator untuk menurunkan tegangan sedangkan regulator boost untuk menaikkan
tegangan. Tetapi yang akan dibahas di sini yaitu LM2596 yang termasuk dalam
kategori regulator buck. Regulator boost pada umumnya lebih kompleks dan jika
komponennya tidak tepat maka keluaran yang dihasilkan tidak efisien. Bentuk dari
regulator LM2596 dapat dilihat pada gambar 2.15
29
Laporan Tugas Akhir BAB II
STT Telematika Telkom Purwokerto D312036
Gambar 2.15 : Regulator LM2596
Modul konventer DC ke DC (DC-DC Converter) ini menggunakan IC LM2596
yang merupakan Integrated Circuit (IC) untuk mengubah tingkatan tegangan
(voltage level) arus searah / Direct Curent (DC) menjadi lebih rendah dibanding
tegangan masukannya. Tegangan masukan (input voltage) dapat dialiri tegangan
berapa pun antara 3 Volt hingga 40 Volt DC, yang akan diubah menjadi tegangan
yang lebih rendah di antara 1,5 Volt hingga 35 Volt DC.
Sesuai dengan namanya regulator switching bekerja dengan sistem switching /
saklar yang artinya bekerja pada 2 kondisi, ON-OFF. Tegangan akan di-saklar
sesuai dengan tegangan umpan balik ke pin Feedback. Di dalam LM2596 pin
Feedback terhubung dengan penguat kemudian masuk ke komparator dibandingkan
dengan yang suatu nilai tegangan. Keluaran komparator ini menentukan keadaan
output switching. Tegangan pembanding pada komparator sama dengan tegangan
output untuk tipe fix output sedangkan untuk tipe adj (adjustable) tegangan
pembandingnya 1.23V. Kecepatan penyaklaran (ON-OFF) LM2596 adalah
150kHz. Untuk cara kerja dari LM2596 lebih jelas lagi dapat dilihat pada gambar
2.16. Sedangkan pada tabel 2.4 dapat dilihat karakteristik dari LM2596.
Gambar 2.16 : Cara Kerja Regulator LM2596
30
Laporan Tugas Akhir BAB II
STT Telematika Telkom Purwokerto D312036
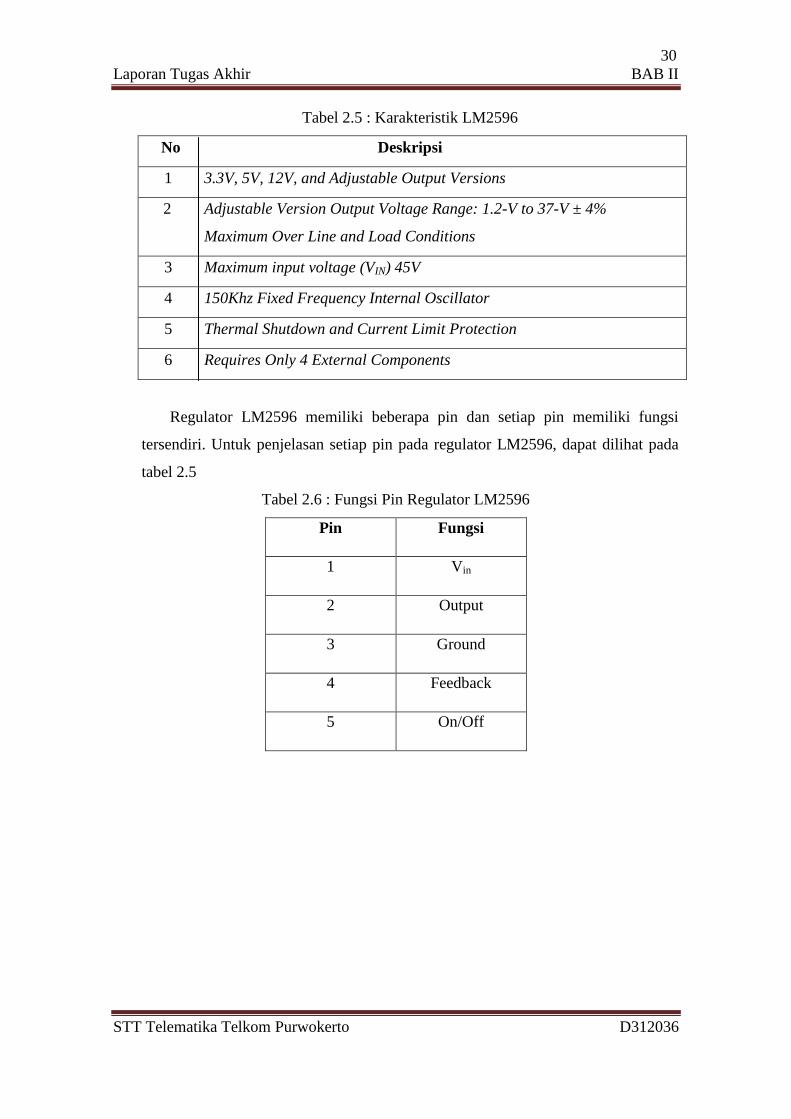
Tabel 2.5 : Karakteristik LM2596
No Deskripsi
1 3.3V, 5V, 12V, and Adjustable Output Versions
2 Adjustable Version Output Voltage Range: 1.2-V to 37-V ± 4%
Maximum Over Line and Load Conditions
3 Maximum input voltage (VIN) 45V
4 150Khz Fixed Frequency Internal Oscillator
5 Thermal Shutdown and Current Limit Protection
6 Requires Only 4 External Components
Regulator LM2596 memiliki beberapa pin dan setiap pin memiliki fungsi
tersendiri. Untuk penjelasan setiap pin pada regulator LM2596, dapat dilihat pada
tabel 2.5
Tabel 2.6 : Fungsi Pin Regulator LM2596
Pin Fungsi
1 Vin
2 Output
3 Ground
4 Feedback
5 On/Off