BAB II ALAT UJI REM PORTABEL...Pada bab ini akan dibahas secara singkat mengenai teori dasar yang...
16
7 BAB II ALAT UJI REM PORTABEL Dalam merealisasikan alat uji rem portabel diperlukan dasar teori untuk menunjang agar didapatkan hasil yang optimal. Pada bab ini akan dibahas secara singkat mengenai teori dasar yang digunakan untuk merealisasikan alat uji rem portabel. 2.1. Kecepatan Rata-Rata dan Kecepatan Sesaat Kecepatan merupakan laju perubahan posisi. Kecepatan rata-rata didefinisikan sebagai perbandingan antara perpindahan x dan selang waktu 1 2 t t t :[5] 1 2 1 2 t t x x t x v rata rata (2.1) Keterangan : v rata rata = kecepatan rata-rata (m/s) x = perubahan jarak (m) Δt = perubahan waktu (s) Kecepatan sesaat adalah limit rasio x /Δt mendekati nol. Didefinisikan sebagai berikut : dt x d t x v t sesaat lim 0 (2.2) Keterangan : sesaat v = kecepatan sesaat (m/s) 2.3. Percepatan Rata-Rata dan Percepatan Sesaat Percepatan adalah perubahan kecepatan dalam satuan waktu tertentu yang nilainya positif. Sedangkan perlambatan adalah percepatan dengan nilai negatif. Percepatan rata-rata untuk selang waktu 1 2 t t t didefinisikan sebagai rasio Δ v / Δt, dengan 1 2 v v v adalah kecepatan sesaat untuk selang waktu tersebut : [5]
Transcript of BAB II ALAT UJI REM PORTABEL...Pada bab ini akan dibahas secara singkat mengenai teori dasar yang...

7
BAB II
ALAT UJI REM PORTABEL
Dalam merealisasikan alat uji rem portabel diperlukan dasar teori untuk
menunjang agar didapatkan hasil yang optimal. Pada bab ini akan dibahas secara
singkat mengenai teori dasar yang digunakan untuk merealisasikan alat uji rem portabel.
2.1. Kecepatan Rata-Rata dan Kecepatan Sesaat
Kecepatan merupakan laju perubahan posisi. Kecepatan rata-rata didefinisikan
sebagai perbandingan antara perpindahan x
dan selang waktu 12 ttt :[5]
12
12
tt
xx
t
xv ratarata
(2.1)
Keterangan : v ratarata
= kecepatan rata-rata (m/s)
x
= perubahan jarak (m)
Δt = perubahan waktu (s)
Kecepatan sesaat adalah limit rasio x
/Δt mendekati nol. Didefinisikan sebagai
berikut :
dt
xd
t
xv
tsesaat
lim
0
(2.2)
Keterangan : sesaatv
= kecepatan sesaat (m/s)
2.3. Percepatan Rata-Rata dan Percepatan Sesaat
Percepatan adalah perubahan kecepatan dalam satuan waktu tertentu yang
nilainya positif. Sedangkan perlambatan adalah percepatan dengan nilai negatif.
Percepatan rata-rata untuk selang waktu 12 ttt didefinisikan sebagai rasio Δ v
/
Δt, dengan 12 vvv
adalah kecepatan sesaat untuk selang waktu tersebut : [5]

8
t
va ratarata
(2.3)
Keterangan : ratarataa
: percepatan rata-rata/ perlambatan rata-rata (m/s²)
v
: perubahan kecepatan (m/s)
Δt : perubahan waktu (s)
Percepatan sesaat adalah limit rasio Δv/Δt dengan Δt mendekati nol.
t
va
tsesaat
0lim
(2.4)
Keterangan : sesaata
= percepatan sesaat/ perlambatan sesaat (m/s²)
2.4. Gaya Penginjakan Rem dan Gaya Perlambatan Kendaraan
Gaya penginjakan pengereman adalah besarnya gaya yang diberikan pada
kendali rem pada kendaraan. Didefinisikan sebagai :[6]
ratarataamdt
vdmF
.. (2.5)
Keterangan : F
= gaya kendali rem (Newton)
m = massa kendaraan (kg)
a
= percepatan rata-rata kendaraan (m/s²)
Selain gaya injak rem, ada juga gaya perlambatan kendaraan yang ditentukan
oleh tahanan selip. Selip terjadi karena adanya gesekan antara roda dan permukaan
jalan. Didefinisikan sebagai : [6]
F
= µW
(2.6)
Keterangan : F
= gaya perlambatan kendaraan (Newton)
µ = koefisien gesekan antara ban dan permukaan
jalan
W
= berat kendaraan (Newton)

9
sehingga nilai µ didapat dari hasil subtitusi Persamaan (2.5) dan Persamaan (2.6) :
g
a
(2.7)
Keterangan : µ = koefisien gesekan antara ban dan permukaan jalan
a = percepatan kendaraan (m/s²)
g = percepatan gravitasi ≈ 9.806 m/s²
2.5. Jarak Pengereman
Jarak pengereman merupakan jarak perlambatan kendaraan saat rem mulai
diinjak hingga pada posisi berhenti. Didefinisikan sebagai berikut : [7]
dtdtas ratarata ))((
(2.8)
Keterangan : s
= jarak pengereman(m)
ratarataa
= perlambatan kendaraan (m/s)
Gambar 2.1 Jarak Pengereman [10]
2.6. Efisiensi Rem
Efisiensi rem merupakan koefisien yang menunjukkan seberapa maksimal kerja
rem kendaraan. Semakin besar nilai efisiensinya, maka fungsi rem semakin baik.
Tingkat efisiensi rem suatu kendaraan dapat diukur :
Efisiensi rem =
x 100 % (2.9)
10
%100.
.x
gm
am ratarata
%100xg
a ratarata (2.10)
Keterangan : µ = efisiensi rem (%)
ratarataa = perlambatan kendaraan (m/s)
g = percepatan gravitasi ≈ 9.806 m/s²
Sehingga dapat dikatakan bahwa efisiensi rem adalah koefisien batas gesekan
antara ban dan permukaan jalan (µ).[6]
2.7. Mikrokontroler Atmega32
Mikrokontroler ATMega32 merupakan IC (Integrated Circuit) mikrokontroler
buatan Atmel Corporation. Mikrokontroler ATMega32 mempunyai fasilitas–fasilitas
sebagai berikut :
1. Saluran I/O sebanyak 32 buah, yaitu Port A, Port B, Port C dan Port D.
2. ADC 10 bit sebanyak 8 saluran.
3. Tiga buah timer/counter dengan kemampuan pembandingan.
4. CPU yang terdiri atas 32 buah register.
5. Watchdog timer dengan osilator internal.
6. SRAM sebesar 2 KB.
7. Memori flash sebesar 32 KB dengan kemampuan Read While Write.
8. Unit interupsi internal dan eksternal.
9. Port antarmuka SPI.
10. EEPROM sebesar 1024 B yang dapat diprogram saat operasi.
11. Antarmuka komparator analog.
12. Port USART untuk komunikasi serial.

11
Konfigurasi pin ATMega32 bisa dilihat pada Gambar 2.2 dan dapat dijelaskan
secara fungsional konfigurasi pin ATMega32 sebagai berikut:
1. VCC merupakan pin yang berfungsi sebagai pin masukan catu daya.
2. GND merupakan pin ground.
3. Port A (PA0..PA7) merupakan pin I/O dua arah dan pin masukan ADC.
4. Port B (PB0..PB7) merupakan pin I/O dua arah dan pin fungsi khusus, yaitu
Timer/Counter, komparator analog dan SPI.
5. Port C (PC0..PC7) merupakan pin I/O dua arah dan pin fungsi khusus, yaitu
komparator analog dan timer oscilator.
6. Port D (PD0..PD7) merupakan pin I/O dua arah dan pin fungsi khusus, yaitu
komparator analog, interupsi eksternal dan komunikasi serial.
7. RESET merupakan pin yang digunakan untuk mereset mikrokontroler.
8. XTAL1 dan XTAL2 merupakan pin masukan clock eksternal.
9. AVCC merupakan pin masukan tegangan ADC.
10. AREF merupakan pin masukan tegangan referensi ADC.
Gambar 2.2 Pin ATMega32

12
2.8. LCD (Liquid Crystal Display)
Modul LCD yang digunakan pada skripsi ini adalah LCD karakter 20 kolom x 4
baris. LCD ini melakukan operasi baca atau tulis melalui 3 jalur control word (RS,
R/W, E) dan 8 jalur data bus yang bekerja pada tegangan +5VDC. Tabel 2.1
menunjukkan pin keluaran dari modul LCD karakter.
Tabel 2.1 Konfigurasi Pin LCD
Pin No. Symbol Level Description
1 Vss 0V Ground
2 Vdd 5.0V Supply Voltage for logic
3 VO (Variable) Operating voltage for LCD
4 RS H/L H: Data, L: Instruction code
5 R/W H/L H: Read, L: Write
6 E H,H→L Chip enable signal
7 DB0 H/L Data bit 0
8 DB1 H/L Data bit 1
9 DB2 H/L Data bit 2
10 DB3 H/L Data bit 3
11 DB4 H/L Data bit 4
12 DB5 H/L Data bit 5
13 DB6 H/L Data bit 6
14 DB7 H/L Data bit 7
15 A 4.2V-4.6V LED +
16 K 0V LED -
2.9. RTC (Real Time Clock)
Perancangan untuk modul Real Time Clock (RTC) menggunakan IC RTC
DS1307. Gambar 2.5 adalah Konfigurasi Pin DS 1307. Pin X1 dan X2 adalah pin yang
terhubung dengan Kristal eksternal. Kristal ini merupakan pembangkit sinyal untuk
mendukung kerja DS 1307. Nilai Kristal yang digunakan adalah 32,768 kHz.
Pin Vbat adalah pin yang terhubung dengan baterai yang berfungsi sebagai catu
daya cadangan apabila catu daya utama IC DS1307 (VCC, pin 8) mati. Ketika catu daya
mati, baterai ini akan tetap menjaga IC DS1307 bekerja.
Pin SDA dan SCL ini adalah pin yang dihubungkan dengan mikrokontroler
sebagai jalur data dan jalur clock. Komunikasi antara dua IC ini menggunakan dua kabel

13
(two wire bidirectional ). Untuk pin SDA DS1307 terhubung dengan pin PORTB.0/SDA
dan untuk pin SCL DS1307 akan terhubung dengan pin PORTB.1/SCL pada
mikrokontroler.
Gambar 2.3 Konfigurasi Pin DS 1307
Gambar 2.4 Untai Modul RTC
2.10. Sensor Accelerometer
Akselerasi atau percepatan merupakan suatu perubahan kecepatan terhadap
waktu. Bertambahnya suatu kecepatan dalam suatu rentang waktu disebut juga sebagai
percepatan (acceleration). Kebalikan dari percepatan adalah perlambatan
(deceleration), yakni berkurangnya kecepatan dalam suatu rentang waktu dibanding
dengan kecepatan sebelumnya. Percepatan merupakan besaran vektor karena
merupakan penurunan dari kecepatan yang merupakan besaran vektor sehingga
percepatan bergantung pada arah.

14
Accelerometer merupakan sensor percepatan, sensor ini mengukur percepatan
akibat pengaruh gravitasi bumi dan dapat mengukur percepatan akibat gerakan benda
yang melekat padanya.
2.10.1. Accelerometer LIS3LV02DL
Sensor accelerometer yang digunakan adalah LIS3LV02DL buatan
STmicroelectronics yang mempunyai 3 axis (x, y, z) pengukuran dengan output data
digital yang linier (±2g - ±6g) . Antar muka yang digunakan dapat berupa two-wire
interface - I²C (Inter-Integrated Circuit) atau SPI (Serial perihperal Interface).
Konfigurasi pin accelerometer dapat dilihat pada Gambar 2.5 :
Gambar 2.5 Konfigurasi Pin LIS3LV02DL
Tabel 2.2 Karakteristik Sensor LIS3LV02DL
Simbol Parameter Tes Kondisi Minimal Ideal Maksimal Satuan
FS Jangkauan
Pengukuran
Set bit FS ke 0 ±1,7 ±2,0 g
Set bit FS ke 1 ±6,0 ±6,0
Dres Resolusi
sensor
Full scale ±2g
ODR =40 Hz 1,0
mg
Full scale ±2g
ODR =160 Hz 2,0
Full scale ±2g
ODR =640 Hz 3,9
Full scale ±2g
ODR =2560 Hz 15,6
So Sensitivitas
Full scale =±2g
12 bit
representasi data
920 1024 1126
LSb/g Full scale =±6g
12 bit representasi
data
306 340 374

15
Karakteristik dari sensor LIS3LV02DL yang berupa measurement range, device
resolution, dan sensitivity dapat dilihat pada Tabel 2.2. Dari Tabel 2.2 juga dapat
diketahui bahwa Accelerometer LIS3LV02DL mempunyai range pengukuran g dari ±2g
s.d. ±6g. Untuk menghasilkan output sensitifitas yang tinggi, maka sensitifitasnya diatur
sebesar ±2g dengan 12 bit representation sehingga menghasilkan output 920 LSB/g
pada minimalnya dan menghasilkan output 1126 LSB/g pada maksimalnya. Resolusi
dari sensor accelerometer jika menggunakan ODR (Output Data Rate) sebesar 40 Hz
saat full scale ±2g, akan memiliki resolusi sebesar 1,0 mg (miligravitasi)[9].
2.10.2. Konsep accelerometer LIS3LV02DL
Pada intinya, accelerometer LIS3LV02DL terdiri dari dua permukaan sel mesin
mikro yang bersifat kapasitif atau disebut juga g-cell. Struktur mekanik g-cell terbuat
dari bahan semikonduktor (polysilicon) dan dapat dimodelkan sebagai sepasang sinar
yang terpancarkan pada suatu benda yang bergerak diantara dua sumber sinar tetap.
Benda tersebut akan bergerak ketika ada percepatan. Karena sinar terpancarkan pada
benda bergerak tadi, maka jarak antara benda dengan sumber sinar tetap pada satu sisi
akan bertambah sejumlah berkurangnya jarak pada sisi yang lain. Hal ini menyebabkan
berubahnya nilai masing-masing kapasitor yang dapat dirumuskan pada Persamaan
(2.12).
(2.11)
Keterangan : C = nilai kapasitor (farad)
A = luas bidang yang dipancari sinar ( m²)
D = jarak antara sinar tetap dan benda yang
bergerak(m)
= Permitifitas dielektrik
Gambar 2.6 adalah gambaran sederhana model transduser g-cell.
16
Gambar 2.6 Model Sederhana Transduser g-Cell
2.10.3 Ilustrasi Accelerometer
Untuk memahami lebih jelas tentang accelerometer, maka digunakan ilustrasi
gambar bola yang menggambarkan percepatan sebuah accelerometer[8]. Gambar 2.7
s.d Gambar 2.10 adalah ilustrasi accelerometer yang digambarkan dalam bentuk bola.
Gambar 2.7 Ilustrasi Accelerometer X= 0g,Y= 0g,Z= 0g
Gambar 2.8 Ilustrasi Accelerometer X= -1g,Y= 0g,Z= 0g

17
Gambar 2.9 Ilustrasi Accelerometer X= 0g,Y= 0g,Z= -1g
Gambar 2.10 Ilustrasi Accelerometer X= -0.71g,Y= 0g,Z= -0.71g
Ilustrasi accelerometer juga bisa digambarkan dalam bentuk vektor dapat dilihat
pada Gambar 2.11.
Gambar 2.11 Ilustrasi Vektor Accelerometer Tiga Sumbu
18
Dari ilustrasi vektor dapat diketahui bahwa :
cos(Axr) = Rx / R (2.12)
cos(Ayr) = Ry / R (2.13)
cos(Azr) = Rz / R (2.14)
√ (2.15)
Dari persamaan diatas bisa diketahui sudutnya yaitu :
Axr = arccos(Rx/R) (2.16)
Ayr = arccos(Ry/R) (2.17)
Azr = arccos(Rz/R) (2.18)
cosX = cos(Axr) = Rx / R (2.19)
cosY = cos(Ayr) = Ry / R (2.20)
cosZ = cos(Azr) = Rz / R (2.21)
Rumus triplet ini sering disebut direction cosine dan juga bisa
direpresentasikan dalam persamaan :
√ (2.22)
2.10.4 Metode Integral dengan Pendekatan Trapezoidal
Data yang dihasilkan oleh accelerometer adalah berupa data percepatan. Untuk
memperoleh data kecepatan dan jarak, maka diperlukan proses integral seperti pada
persamaan :
∫ (2.23)
∫ ∫ (2.24)
Keterangan : = kecepatan accelerometer (m/s)
= percepatan(m/s²)
t = waktu (s)
19
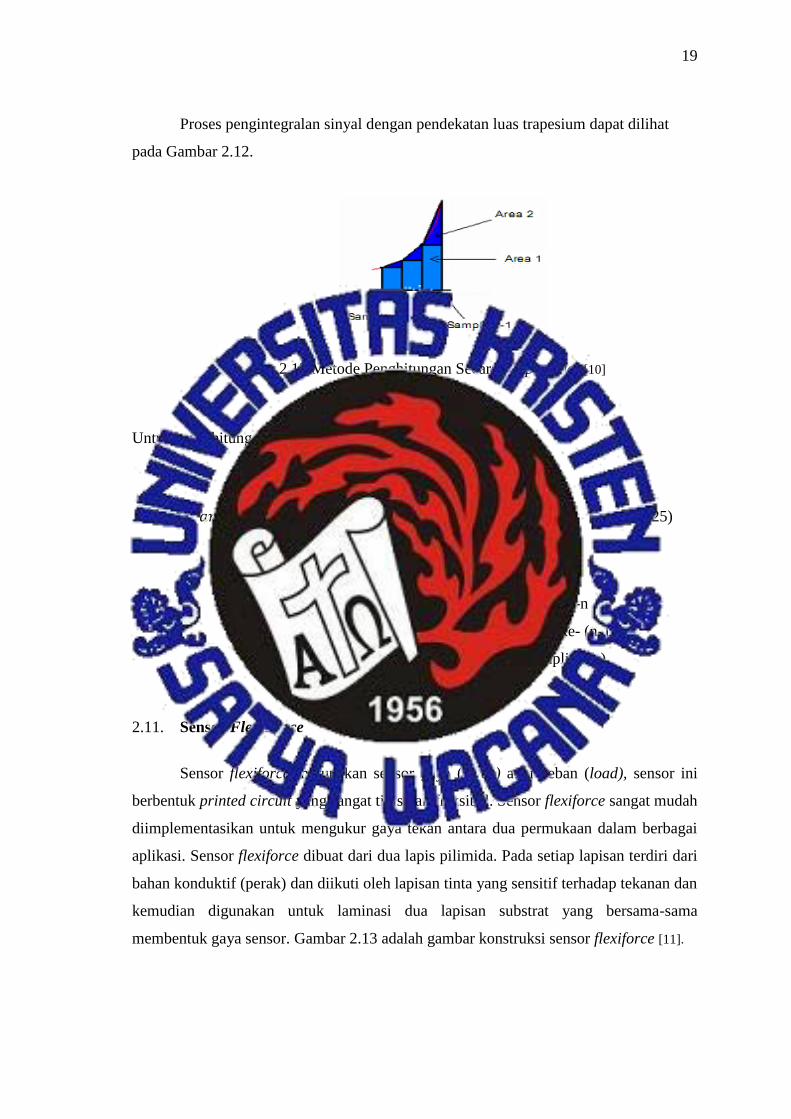
Proses pengintegralan sinyal dengan pendekatan luas trapesium dapat dilihat
pada Gambar 2.12.
Gambar 2.12 Metode Penghitungan Secara Trapezoidal [10]
Untuk menghitung luas area digunakan persamaan :
(2.25)
Keterangan : = Luas area ke-n
= sample data ke-n
= sample data ke- (n-1)
T = Waktu sampling (s)
2.11. Sensor FlexiForce
Sensor flexiforce merupakan sensor gaya (force) atau beban (load), sensor ini
berbentuk printed circuit yang sangat tipis dan fleksibel. Sensor flexiforce sangat mudah
diimplementasikan untuk mengukur gaya tekan antara dua permukaan dalam berbagai
aplikasi. Sensor flexiforce dibuat dari dua lapis pilimida. Pada setiap lapisan terdiri dari
bahan konduktif (perak) dan diikuti oleh lapisan tinta yang sensitif terhadap tekanan dan
kemudian digunakan untuk laminasi dua lapisan substrat yang bersama-sama
membentuk gaya sensor. Gambar 2.13 adalah gambar konstruksi sensor flexiforce [11].

20
Gambar 2.13 Konstruksi Sensor Flexiforce
2.11.1. Prinsip Kerja Sensor Flexiforce
Sensor flexiforce bersifat resistif dan nilai konduktansinya berbanding lurus
dengan gaya/beban yang diterimanya. Semakin besar beban yang diterima sensor
flexiforce, maka nilai hambatan output-nya akan semakin menurun, namun jika besar
beban yang diterima semakin kecil, maka nilai hambatan outputnya akan semakin
membesar. Pada keadaan tanpa beban, resistansi sensor ini sebesar kurang lebih 20M
ohm. Ketika diberi beban maksimum, resistansi sensor akan turun hingga kurang lebih
20k ohm.
Sensor flexiforce yang digunakan yaitu seri A-201-H buatan Tekscan yang bisa
mengukur gaya hingga 112,40 lbs (500 N). Gambar 2.14 adalah gambar grafik
hubungan resistansi dan konduktansi flexiforce, sedangkan Gambar 2.15 adalah gambar
sensor flexiforce.

21
Gambar 2.14 Grafik Hubungan Resistansi Dan Konduktansi Flexiforce [11]
Gambar 2.15 Sensor FlexiForce
Antarmuka yang digunakan untuk berkomunikasi dengan mikrokontroler adalah
melalui ADC (Analog to Digital Converter) yang sudah ada pada internal
mikrokontroler ATMega32. ATMega32 merupakan tipe AVR yang telah dilengkapi
dengan 8 saluran ADC internal dengan fidelitas 10 bit. Mode yang digunakan adalah
mode free running, yang memungkinkan pengkonversiannya hanya sekali. Masukan
analog ADC tegangan harus lebih besar dari 0 V dan lebih kecil daripada tegangan
referensi. Masukan ADC dihubungkan dengan konfigurasi potensio yang dihubungkan
dengan VCC dan GND untuk memperoleh rentang masukan analog ADC dari 0 volt
sampai 5 volt. Untuk hasil kalkulasi, ADC dapat diperoleh dengan persamaan berikut :

22
Hasil konversi ADC = (Vin/Vreff) x 1023 (2.26)
Keterangan : Vin = tegangan masukan
Vreff = tegangan referensi
1023d = rentang output ADC 10bit