BAB I PENDAHULUAN -...
22
1 BAB I PENDAHULUAN I.1. Latar Belakang Manusia hidup di bumi yang merupakan dunia 3D. Para peneliti dan insinyur kebumian telah lama mencoba membuat tampilan grafis tentang aspek spasial 3D dari dunia nyata dalam bentuk sketsa dan gambar atau peta (Pilouk, 2008). Peta merupakan gambaran permukaan bumi tiga dimensi pada bidang datar dua dimensi dengan skala dan sistem proyeksi tertentu serta memberikan infomasi spasial dan non-spasial. Namun, peta memiliki kekurangan salah satunya adalah tidak mampu merepresentasikan bentuk suatu objek secara detail khususnya pada daerah perkotaan. Peta dua dimensi daerah perkotaan tidak mampu memberikan informasi keruangan berupa data tinggi suatu objek (Pilouk, 2008). Oleh karena itu, informasi visualisasi tiga dimensi daerah perkotaan menjadi penting untuk memenuhi kebutuhan informasi tentang suatu kota. Visualisasi tiga dimensi daerah perkotaan dapat dilakukan dengan pembuatan model 3D kawasan kota. Model 3D kawasan kota dapat diartikan sebagai representasi digital dari permukaan dan objek yang ada di wilayah kota secara geospasial. Model 3D kawasan kota dapat digunakan sebagai data untuk pengambilan keputusan terkait pembangunan kota misalnya dalam hal pekerjaan rekonstruksi, pemeliharaan dan rehabilitasi bangunan bersejarah. Metode pembuatan 3D city model yang umum digunakan yaitu pembuatan 3D city model menggunakan metode extrude (menarik data 2D kearah vertikal) menggunakan data citra dan foto udara sehingga menghasilkan model 3D. Namun, model 3D hasil metode extrude memiliki tingkat kedetilan dan ketelitian yang rendah karena model yang dihasilkan hanya berupa model 3D primitif dalam bentuk kubus/balok. Oleh karena itu, diperlukan adanya suatu kajian untuk membuat suatu model 3D kawasan kota dengan tingkat kedetilan dan ketelitian yang tinggi. Pembuatan model kota 3D dapat dilakukan dengan menggunakan data hasil pengukuran Terrestrial Laser Scanner (TLS) yang dikombinasikan dengan data point clouds foto udara hasil pengukuran Unmanned Aerial Vehicle (UAV). Point clouds
-
Upload
hoangxuyen -
Category
Documents
-
view
225 -
download
3
Transcript of BAB I PENDAHULUAN -...

1
BAB I
PENDAHULUAN
I.1. Latar Belakang
Manusia hidup di bumi yang merupakan dunia 3D. Para peneliti dan insinyur
kebumian telah lama mencoba membuat tampilan grafis tentang aspek spasial 3D dari
dunia nyata dalam bentuk sketsa dan gambar atau peta (Pilouk, 2008). Peta merupakan
gambaran permukaan bumi tiga dimensi pada bidang datar dua dimensi dengan skala
dan sistem proyeksi tertentu serta memberikan infomasi spasial dan non-spasial.
Namun, peta memiliki kekurangan salah satunya adalah tidak mampu
merepresentasikan bentuk suatu objek secara detail khususnya pada daerah perkotaan.
Peta dua dimensi daerah perkotaan tidak mampu memberikan informasi keruangan
berupa data tinggi suatu objek (Pilouk, 2008). Oleh karena itu, informasi visualisasi
tiga dimensi daerah perkotaan menjadi penting untuk memenuhi kebutuhan informasi
tentang suatu kota.
Visualisasi tiga dimensi daerah perkotaan dapat dilakukan dengan pembuatan
model 3D kawasan kota. Model 3D kawasan kota dapat diartikan sebagai representasi
digital dari permukaan dan objek yang ada di wilayah kota secara geospasial. Model
3D kawasan kota dapat digunakan sebagai data untuk pengambilan keputusan terkait
pembangunan kota misalnya dalam hal pekerjaan rekonstruksi, pemeliharaan dan
rehabilitasi bangunan bersejarah.
Metode pembuatan 3D city model yang umum digunakan yaitu pembuatan 3D
city model menggunakan metode extrude (menarik data 2D kearah vertikal)
menggunakan data citra dan foto udara sehingga menghasilkan model 3D. Namun,
model 3D hasil metode extrude memiliki tingkat kedetilan dan ketelitian yang rendah
karena model yang dihasilkan hanya berupa model 3D primitif dalam bentuk
kubus/balok. Oleh karena itu, diperlukan adanya suatu kajian untuk membuat suatu
model 3D kawasan kota dengan tingkat kedetilan dan ketelitian yang tinggi.
Pembuatan model kota 3D dapat dilakukan dengan menggunakan data hasil
pengukuran Terrestrial Laser Scanner (TLS) yang dikombinasikan dengan data point
clouds foto udara hasil pengukuran Unmanned Aerial Vehicle (UAV). Point clouds

2
pada TLS memiliki informasi koordinat dalam sistem 3D dan informasi mengenai
warna objek (Vidyan dkk., 2013). Data point clouds foto udara UAV digunakan untuk
menambah data point clouds pada objek yang tidak terakuisisi instrumen TLS
misalnya atap bangunan. Gabungan data point clouds hasil penyiaman instrumen TLS
dan foto udara UAV mampu menghasilkan 3D city model dengan tingkat kedetilan
LOD3 dan tingkat akurasi yang tinggi.
Pemodelan 3D kawasan kota dapat dilakukan pada semua wilayah, salah satunya
adalah kawasan pariwisata Tomok. Tomok merupakan kawasan pariwisata di Pulau
Samosir yang terletak di pesisir timur laut Pulau Samosir, Danau Toba, Sumatera
Utara. Tomok merupakan salah satu pintu masuk ke Pulau Samosir yang paling ramai
dilalui oleh wisatawan. Pemilihan Tomok sebagai objek fokus kajian karena Tomok
merupakan situs kebudayaan Batak yang terkenal di kalangan wisatawan. Terdapat
banyak situs peninggalan zaman purba seperti rumah adat khas Suku Batak dan makam
raja Batak di Tomok. 3D city model objek wisata Tomok dapat digunakan sebagai data
tambahan bagi wisatawan untuk mencari informasi mengenai Tomok. Model 3D objek
wisata Tomok juga dapat digunakan sebagai data untuk keperluan rekonstruksi dan
rehabilitasi objek wisata yang terdapat di dalamnya.
I.2. Rumusan Masalah
Sebagian besar pembuatan 3D city model saat ini tidak menggunakan data
ukuran di lapangan. Ketelitian geometri model bangunan dalam pembuatan 3D city
model tanpa menggunakan data ukuran yang diambil dilapangan memiliki tingkat
ketelitian yang rendah. Pembuatan 3D city model menggunakan data akuisisi
instrumen Terrestrial Laser Scanner dan point clouds foto udara Unmanned Aerial
Vehicle dapat menghasilkan model 3D dengan ketelitian yang tinggi.
I.3. Cakupan Kegiatan
Pada kegiatan ini, cakupan kegiatan yang dilakukan meliputi :
1. Lokasi kegiatan aplikatif ini bertempat di Kota Tomok, Kabupaten Samosir,
Provinsi Sumatera Utara.
2. Wilayah yang digunakan dalam pembuatan 3D city model memiliki luas 6
hektar yang di dalamnya terdapat bangunan pasar, tempat ibadah, rumah adat
khas Suku Batak, dan bangunan warga sipil.

3
3. Data yang digunakan pada kegiatan aplikatif ini adalah data point clouds hasil
penyiaman instrumen Terrestrial Laser Scanner (TLS) Topcon seri GLS-
2000M dan Unmanned Aerial Vehicle (UAV) tipe fix wing, LYNX swift radio.
4. Hasil dari kegiatan aplikatif ini adalah visualisasi kawasan objek wisata Tomok
dalam bentuk model 3D kawasan Kota yang memiliki tingkat kedetilan Level
of detail 3 (LOD3).
I.4. Tujuan
Tujuan kegiatan aplikatif ini adalah menghasilkan dan menyajikan model 3D
kawasan objek wisata Tomok, Kabupaten Samosir, Provinsi Sumatera Utara dalam
format digital menggunakan data point clouds hasil penyiaman instrumen Terrestrial
Laser Scanner dan data foto udara menggunakan wahana Unmanned Aerial Vehicle
dengan tingkat kedetilan LOD3.
I.5. Manfaat Kegiatan
Manfaat dari kegiatan aplikatif ini adalah 3D sebagai referensi pembangunan 3D
city model menggunakan data Terrestrial Laser Scanner dan data foto udara
Unmanned Aerial Vehicle bagi dinas pekerjaan umum sehingga tersedia data akurat
yang dapat digunakan sebagai data rekonstruksi, rehabilitasi dan pemeliharaan
bangunan.
I.6. Landasan Teori
I.6.1. Model 3D
3D modelling adalah proses merepresentasikan suatu objek pada dunia nyata
ke dalam bentuk digital (Biljecki, 2017). Proses 3D modelling menghasilkan produk
berupa model 3D. Model 3D secara keseluruhan merupakan inovasi dari teknologi
komputer grafik. Model 3D yang baik adalah model 3D yang mampu
merepresentasikan bentuk suatu objek menyerupai objek sebenarnya secara detil dan
memiliki ukuran yang akurat. Model 3D dibagi menjadi 3 kategori, antara lain:
a. Solid
Model solid 3D merupakan bentuk visualisasi 3D dengan
menggabungkan bentuk objek primitif seperti kubus, bola, silinder. Pembuatan
model solid dalam bentuk yang lain dapat dilakukan melalui operasi gabungan
(union), irisan (intersect), dan selisih (different) (Al Adefan, 2016). Model
solid dapat digunakan untuk menghitung volume, massa, ukuran objek, dan

4
momen inersia objek. Pembentukan model 3D suatu objek dengan
menggunakan model solid memerlukan operasi yang rumit.
b. Surface model
Surface model adalah tipe model 3D yang tidak memiliki ketebalan.
Perbedaan antara Surface model dan solid model adalah solid model mampu
memberikan informasi tentang massa, sedangkan surface model tidak bisa.
Surface model mampu mewakili bentuk dari permukaan objek. Pada beberapa
kasus, pemodelan objek yang memiliki bentuk yang rumit dapat lebih mudah
dilakukan dengan menggunakan surface model dibandingkan menggunakan
solid model.
c. Mesh
Mesh merupakan sebuah model jaring segitiga yang dibentuk dari
kumpulan titik. Kualitas bentuk model 3D yang dibentuk oleh mesh
dipengaruhi oleh kerapatan dan banyaknya data titik yang tersedia. Model
mesh dibentuk dengan cara menghubungkan titik-titik yang saling berdekatan
sehingga membentuk suatu jaring segitiga. Mesh mampu merepresentasikan
bentuk permukaan 3D secara baik. Mesh memiliki kemampuan untuk
mengatur kehalusan ataupun kondisi sebenarnya dari objek yang dimodelkan.
Kualitas mesh merepresentasikan objek dengan baik tergantung pada kerapatan
titik yang menyusunnya.
I.6.2. 3D City Model
3D city model atau model 3D kawasan perkotaan merupakan suatu model 3D
yang merepresentasikan suatu kawasan perkotaan dalam bentuk matematis. 3D city
model menampilkan fitur-fitur buatan manusia dan alam meliputi model permukaan
tanah, model bangunan, model vegetasi, serta model jalan dan sistem transportasi.
(Vosselman & Dijkman, 2001). Fitur yang ditampilkan pada 3D city model adalah
bentuk permukaan terrain dan model bangunan. Model terrain menggambarkan
kondisi permukaan tanah tanpa objek lain yang terletak di atasnya. Model bangunan
atau fitur buatan manusia di modelkan menggunakan bentuk model primitif
menggunakan fitur vertex dan model permukaan objek. 3D city model juga berfungsi
pada bidang perencanaan wilayah kota, industri telekomunikasi dan data penunjang
pariwisata (Vosselman & Dijkman, 2001).

5
Metode pemodelan kota dikategorikan menjadi 3 macam yaitu otomatis, semi-
otomatis, dan manual. Pedekatan otomatis digunakan untuk mengekstrak objek 3D
seperti gedung, dan jalan-jalan dari foto udara atau satelit secara otomatis
menggunakan teknologi proses dari foto dan pola pada objek buatan. Pendekatan semi-
otomatis adalah untuk membuat objek 3D secara satu persatu dengan dukungan
teknologi pengolahan data fotogrametri. Pendekatan manual adalah untuk
menciptakan seluruh geometri dari sebuah objek secara satu per satu. (Kobayashi,
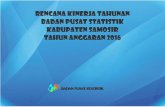
2006). Ilustrasi 3D city model dapat dilihat pada gambar I.1.
Gambar I. 1. 3D city model of Yokohama City (Singh, 2013)
Metode pemodelan kota juga dibagi menjadi dua macam berdasarkan data yang
digunakan yaitu berdasarkan metode fotogrametri dan metode penyiaman laser (Singh,
2013). Metode fotogrametri merupakan metode pemodelan dengan menggunakan data
foto udara, foto satelit, atau menggunakan teknik fotogrametri jarak dekat. Sedangkan
metode penyiaman laser merupakan metode pemodelan menggunakan data hasil
penyiaman laser menggunakan teknik akuisisi lidar maupun teknik pengukuran
menggunakan Terrestrial Laser Scanner. (Singh, 2013)
I.6.3. Klasifikasi 3D city model
3D city model dikategorikan berdasarkan dua hal yaitu skala dan kualitas. Skala
3D city model dibagi menjadi tiga kategori yaitu Street Level, Block Level, dan city
level. Skala Street Level digunakan untuk memvisualisasikan jalan beserta bangunan
sesuai dengan pandangan mata manusia. Skala Block Level digunakan untuk
memvisualisasikan komplek jalanan pada kota termasuk bangunan melalui pandangan

6
dari atas. Sedangkan skala City Model digunakan untuk memvisualisasikan suatu kota
dengan pandangan dari udara dan memiliki daerah yang luas untuk dimodelkan
(Kobayashi, 2006).
Kualitas 3D city model dibagi menjadi tiga kategori yaitu kualitas rendah,
sedang dan kualitas tinggi. Kualitas rendah dirancang untuk membuat model secara
interaktif dalam tampilan pada browser internet. Bangunan dan objek lain yang
dimodelkan pada kualitas rendah tidak dimodelkan dengan tekstur. Model kualitas
menengah dirancang untuk membuat model yang ditampilkan secara real time pada
tampilan komputer. Model kualitas menengah memiliki bentuk lebih rinci
dibandingkan dengan model kota kualitas rendah dengan tambahan tekstur pada
bangunan dan objek yang dimodelkan. Sedangkan model kualitas tinggi dirancang
untuk penampilan secara statis dan memiliki model yang menyerupai dengan kondisi
aslinya baik dalam bentuknya maupun teksturnya (Kobayashi, 2006). Model 3D suatu
kota secara lebih rinci terbagi menjadi sembilan kategori. Pembagian kategori tersebut
merupakan gabungan dari kategori model berdasarkan skala dan kualitas.
Klasifikasi 3D city model yang paling umum digunakan yaitu berdasarkan
tingkat kedetilan model bangunan atau level of detail (LOD). Terdapat 5 tingkatan
kedetilan bangunan yang menjelaskan contoh peningkatan geometri dan kedetilan
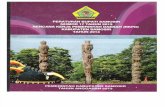
pada model bangunan (Biljecki, 2017). Pembagian klasifikasi 3D city model
berdasarkan tingkat kedetilan model bangunan dapat di lihat pada gambar I.2.
Gambar I. 2. Level of Detail model bangunan (Biljecki, 2017)
Pembagian klasifikasi 3D city model berdasarkan tingkat kedetilan model
bangunan dibagi menjadi 5 tingkatan yaitu LOD0 sampai dengan LOD4. Gambar I. 2
menampilkan perbedaan bentuk geometri model bangunan pada setiap tingkatan
berbeda. Model bangunan LOD0 merupakan model bangunan dua dimensi (2D) yang
merepresentasikan lokasi dari model bangunan. Model LOD0 bukan merupakan

7
model bangunan 3D. Model bangunan LOD0 ditingkatkan dengan cara menarik model
kearah vertikal sehingga menghasilkan model 3D bangunan yang memiliki volume.
Hasil penarikan kearah vertikal model bangunan LOD0 menghasilkan model 3D
bangunan pada level LOD1. Model 3D bangunan LOD1 memiliki bentuk model
dengan geometri primitif berupa kubus atau balok tanpa atap. Peningkatan level LOD1
ke level LOD2 dilakukan dengan menambahkan bagian atap pada model 3D.
LOD3 merupakan model 3D bangunan dengan penambahan detil penyusun
bangunan seperti pintu, jendela, dan detil lain. Model 3D bangunan LOD3 sudah pada
kedudukan dapat menyerupai bangunan asli yang dimodelkan karena penambahan
fitur detil bangunan. Tingkat LOD yang paling tinggi adalah LOD4. LOD4 merupakan
peningkatan model 3D bangunan LOD3 dengan penambahan fitur interior yang
terdapat di dalam bangunan.
I.6.4. Terrestrial Laser Scanner (TLS)
Terrestrial laser scanner (TLS) merupakan suatu instrumen akuisisi data
spasial yang memanfaatkan pancaran gelombang laser untuk menghasilkan titik-titik
dalam jumlah yang banyak dalam bentuk 3 dimensi. Teknologi TLS termasuk metode
baru dalam pekerjaan survei. TLS memiliki kemampuan pengambilan data yang
mudah dan cepat pada suatu objek yang memiliki bentuk geometri yang kompleks
seperti bangunan, mesin, jaringan pipa dan lain-lain (Staiger, 2003). Kelebihan TLS
dibandingkan dengan alat akuisisi data konvensional seperti total station adalah
kemampuan untuk mengambil data berupa point clouds (awan titik) yang sangat rapat,
akurat, cepat dan cara pengambilan data yang relatif mudah (Gordon dkk, 2001). Point
clouds yang dihasilkan dari proses penyiaman TLS tidak hanya berisi informasi
koordinat 3D, tetapi juga memiliki informasi mengenai warna dari objek dan nilai
pantulan benda (Vidyan et al., 2013)
Laser Scanner secara umum dibagi menjadi dua tipe yaitu tipe statis dan tipe
dinamis. Tipe laser scanner statis merupakan laser scanner yang digunakan untuk
mengukur fitur topografi dan objek disekitarnya dengan posisi alat tetap pada satu
tempat. Contoh tipe laser scanner statik adalah Terrestrial laser scanner. Keunggulan
dari tipe ini adalah data yang dihasilkan memiliki tingkat presisi yang tinggi dan
kerapatan titik yang baik (Van Genchten, 2008).

8
Laser Scanner dinamis adalah laser scanner yang diletakkan pada suatu
platform bergerak seperti mobil dan pesawat ketika akuisisi data. Laser scanner tipe
dinamis membutuhkan tambahan alat penentu posisi seperti Global Positioning System
(GPS) dan Inertial Navigation System (INS). Contoh laser scanner dinamis adalah
instrumen laser scanner yang ditempatkan pada wahana bergerak (mobil, pesawat)
(Van Genchten, 2008).
Kegiatan survei menggunakan TLS secara umum dapat dibagi menjadi tiga
tahap utama yaitu akuisisi data, pengolahan data, dan visualisasi data (Staiger, 2003).
Pengukuran TLS menggunakan metode pengukuran tacherometric yaitu kombinasi
antara pengukuran jarak dan pengukuran sudut secara bersama-sama dari titik
berdirinya alat ke permukaan objek (Staiger, 2003).
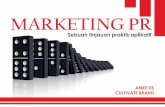
TLS memanfaatkan gelombang laser (Light Amplification by Stimulated
Emmision of Radiation) untuk akuisisi data. Pengukuran jarak yang digunakan pada
alat TLS menggunakan prinsip kerja pulse based. Prinsip kerja pulse based adalah
prinsip pengukuran jarak dengan menghitung selisih waktu tempuh gelombang dari
sumber ke permukaan objek dan kembali ke sumber seperti yang dapat dilihat pada
gambar I.3. Jarak ke permukaan objek dapat dihitung dengan menggunakan rumus
(Van Genchten, 2008):
D = 1
2 x c x ∆t ................................................................................. (1.1)
Keterangan : D = jarak dari alat ke objek
c = cepat rambat gelombang
∆t = selisih waktu
Gambar I. 3. Ilustrasi pengukuran jarak pada TLS (Van Genchten, 2008)
D

9
Gelombang laser yang dipantulkan oleh permukaan objek dan diterima
kembali oleh TLS berupa titik yang memiliki sistem koordinat lokal 3D. penentuan
koordinat pada point clouds hasil penyiaman TLS dihitung menggunakan sudut
horizontal (ϕ) dan vertikal (θ) yang dihasilkan pada saat proses penyiaman. Titik
berdiri scanner dianggap sebagai titik pusat (origin) pada penentuan koordinat 3D.
Ilustrasi pengukuran koordinat dapat di lihat pada gambar I.4.
Gambar I. 4. ilustrasi pengukuran koordinat pada TLS (Reshetyuk, 2009)
Hasil hitungan jarak (D), sudut horizontal (ᵠ) dan vertikal (θ) digunakan untuk
menghitung koordinat 3D pada setiap titik hasil penyiaman TLS. Koordinat 3D dari
masing-masing titik tersebut diperoleh dengan persamaan sebagai berikut (Soeta’at,
2005):
X = D x cos θ x cos ᵠ..............................................................................(1.2)
Y = D x cos θ x sin ᵠ..............................................................................(1.3)
Z = D x sin θ...........................................................................................(1.4)
Keterangan:
D = jarak dari scanner ke permukaan objek
ϕ = sudut horizontal
θ = sudut vertikal
x,y, dan z = koordinat titik permukaan objek

10
Terrestrial laser scanner yang digunakan untuk pengambilan data dalam
kegiatan aplikatif ini adalah terrestrial laser scanner Topcon dengan seri GLS-2000M.
TLS Topcon GLS-2000M merupakan laser scanner statik golongan medium range
dengan maksimum range penyiaman laser sejauh 350 m (GLS-2000 Series Brochure,
2015).
I.6.5. Foto udara menggunakan Unmanned Aerial Vehicle (UAV)
UAV (unmanned aerial vehichle) merupakan sebuah platform terbang tanpa
pilot dan dikendalikan menggunakan remote control dari permukaan tanah
(Eisenbeiss, 2009). UAV pada awal perkembangannya digunakan untuk keperluan
militer antara lain pengawasan, pengintaian, dan pemetaan kawasan musuh
(Remondino ,dkk, 2012). Seiring dengan perkembangan ilmu pengetahuan, UAV
dapat di aplikasikan pada berbagai bidang seperti pengawasan wilayah, observasi
lingkungan, pengawasan maritim, dan kegiatan pertambangan (Eisenbeiss, 2004).
UAV dapat diartikan sebagai peralatan pengukuran fotogrametri. Fotogrametri
merupakan seni, ilmu, dan teknologi untuk memperoleh informasi terpercaya tentang
objek fisik dan lingkungan melalui proses perekaman, pengukuran, dan interpretasi
gambaran fotografik dan pola radiasi energi elektromagnetik yang terekam (Wolf,
1993). Teknik pengukuran fotogrametri menggunakan UAV merupakan aplikasi dari
fotogrametri jarak dekat. Istilah fotogrametri jarak dekat pada umumnya digunakan
untuk foto terrestrial yang mempunyai jarak objek sampai dengan 300 meter (Wolf,
1993)
UAV yang digunakan dalam bidang pemetaan dipasang komponen tambahan
berupa kamera untuk pengambilan foto objek di permukaan bumi. Hasil dari foto yang
di potret menggunakan UAV disebut dengan foto udara. Foto udara dibedakan atas
foto vertikal dan foto condong. Foto vertikal merupakan foto udara dengan sumbu
kamera tegak lurus dan bidang foto sejajar dengan bidang datum (Wolf, 1993). Foto
udara condong dibuat dengan sumbu kamera yang sengaja dibuat membentuk sudut
terhadap sumbu vertikal. Ilustrasi orientasi jenis foto udara digambarkan pada gambar
I.5.

11
Gambar I. 5. Ilustrasi orientasi jenis foto udara (Wolf, 1993).
UAV memiliki komponen navigasi utama yaitu GPS (Global Positioning
System), INS (inertial navigation system), dan IMU (inertial Meassuring System). GPS
dan INS digunakan untuk penentuan koordinat pesawat, kompas digunakan untuk
penunjuk arah laju pesawat dan IMU digunakan sebagai sensor penstabil pesawat
(Fajar, 2014).
Pelaksanaan pengukuran fotogrametri menggunakan UAV diperlukan
perencanaan sebelum melakukan pengukuran. Perencanaan penerbangan terdiri dari
dua hal yaitu peta jalur terbang yang menggambarkan daerah yang harus dipotret dan
spesifikasi pemotretan udara (Wolf, 1993). Spesifikasi terdiri atas jenis kamera dan
film, skala foto, tinggi terbang, pertampalan, dan toleransi kesendengan serta
persebaran titik control tanah (Ground Control Point).
Hasil dari pemotretan foto udara menggunakan UAV adalah foto permukaan
tanah yang saling bertampalan. Pertampalan antar foto tersebut digunakan untuk
membuat mosaik foto yang memiliki informasi koordinat 3D. Mosaik foto merupakan
gabungan dari foto-foto yang bertampalan sehingga dapat menggambarkan kondisi
suatu medan. Pada era digital, pengolahan foto udara dilakukan menggunakan
software pengolahan foto. Pengolahan menggunakan perangkat lunak dapat merubah
foto digital menjadi point clouds berbentuk titik-titik dengan koodinat 3D.

12
I.6.6. Point clouds
Point clouds atau awan titik merupakan kumpulan titik yang pada setiap
titiknya memiliki informasi koordinat 3D (x,y dan z) dan nilai intensitas dari pantulan
sinyal laser (Staiger, 2003). Kumpulan titik tersebut saling berdekatan dengan jarak
tertentu sesuai dengan interval jarak yang diatur ketika proses akuisisi data. Kumpulan
titik tersebut dapat mempresentasikan bentuk suatu objek secara identik. Sistem
koordinat point clouds yang dihasilkan oleh penyiaman laser scanner merupakan
sistem koordinat lokal. Diperlukan suatu proses untuk mentransformasi nilai koordinat
lokal pada titik tersebut menjadi nilai koordinat yang sebenarnya. Proses transformasi
sistem koordinat lokal point clouds ke sistem koordinat yang dikehendaki dinamakan
geo-referencing.
Point clouds mampu merepresentasikan bentuk geometri suatu objek nyata
dalam bentuk kumpulan titik. Penggunaan data point clouds yang diperoleh dari
penyiaman laser scanner dapat dibentuk suatu model 3D yang memungkinkan untuk
mempermudah dalam hal visualisasi data (Alkan and Karsidag, 2012). Data point
clouds dapat digunakan untuk melakukan pengecekan atau monitoring konstruksi
suatu bangunan, jalan, atau jembatan seperti yang dapat di lihat pada gambar I.6.
Gambar I. 6. point clouds digunakan untuk pengecekan konstruksi jembatan
Penggaron, Semarang.
I.6.7. Digital Surface Model (DSM)
Digital Surface Model (DSM) merupakan bentuk digital permukaan bumi yang
mencakup segala macam objek yang terdapat diatas permukaan bumi, seperti
bangunan, tumbuhan, objek yang terbentuk secara alami maupun buatan (Vallet dkk.,
2011). Pengolahan DSM dilakukan dengan cara interpolasi antar titik-titik yang saling
berdekatan sehingga membentuk sebuah jaringan Triangulated Irregular Network

13
(TIN). Ketepatan TIN dalam merepresetasikan suatu objek dipengaruhi oleh jumlah
kumpulan titik dan jarak antar titik yang saling berdekatan. Adapun gambaran dari
DSM dapat dilihat pada gambar I.7.
Gambar I. 7. Ilustrasi Digital Surface Model (diadopsi dari
http://gisgeography.com/dem-dsm-dtm-differences/)
Pembuatan DSM dilakukan pada proses pembentukan mozaik foto yang dapat
dilakukan secara otomatis menggunakan foto udara. Foto udara tersebut kemudian
dikonversi menjadi kumpulan titik-titik 3 dimensi yang disebut sebagai point clouds
foto udara. Proses konversi foto udara menjadi kumpulan titik memerlukan
serangkaian foto yang saling bertampalan satu sama lain. Daerah pertampalan foto
tersebut kemudian dapat diproses menjadi point clouds 3D yang dapat di proses untuk
menghasilkan DSM.
I.6.8. Digital Terrain Model (DTM)
Digital Terrain Model (DTM) atau model terrain digital merupakan bentuk
penyajian bentuk permukaan terrain secara digital (Vallet dkk., 2011). DTM
merepresentasikan bentuk permukaan bumi tanpa fitur objek yang terdapat diatasnya.
DTM terbentuk dari kumpulan titik-titik permukaan yang terdapat dipermukaan tanah
dan memiliki nilai koordinat 3 dimensi. Proses pemodelan DTM sama dengan proses
pemodelan DSM yaitu menggunakan metode interpolasi TIN. Model terrain digital
memiliki beberapa kegunaan antara lain :
a. Pembentukan garis kontur yang menggambarkan ketinggian terrain.
b. Sebagai data utama perencanaan pekerjaan konstruksi.
c. Studi stabilitas tanah.
d. Studi hidrologi.
e. Dan lain-lain

14
Contoh gambar digital terrain model digambarkan pada gambar I.8
Gambar I. 8. Ilustrasi Digital Terrain Model (diadopsi dari
http://gisgeography.com/dem-dsm-dtm-differences/)
Perbedaan mendasar antara DTM dan DSM terletak pada fitur yang terdapat
pada model. DTM hanya memodelkan elevasi terrain permukaan bumi yang tidak
melibatkan objek yang terdapat diatasnya, sedangkan pada DSM semua objek yang
terdapat pada permukaan bumi dimodelkan (Eisenbeiss, 2004). Perbedaan antara
Digital Terrain Model dengan Digital Surface Model digambarkan pada gambar I.9.
Gambar I. 9. Ilustrasi perbedaan DSM dan DTM (diadopsi dari http://www.uav-
indonesia.com/single-post/2014/01/18/Pembuatan-DEM-dari-UAV-Fotogrametri)
I.6.9. Registrasi Point Clouds
Registrasi point cloud merupakan proses penggabungan data dari dua atau
lebih data point cloud yang saling terpisah ke dalam satu sistem koordinat. Pada
pengukuran menggunakan instrumen Terrestrial Laser Scanner (TLS), point cloud
terbagi ke dalam scan world yang terpisah. Data point cloud pada setiap scan world
memiliki sistem koordinat lokal sehingga apabila setiap scan world ditampilkan, point
cloud akan saling terpisah.
Proses registrasi dilakukan pada point cloud hasil penyiaman objek besar yang
tidak memungkinkan dapat di akuisisi dalam sekali berdiri alat. Syarat utama untuk

15
melakukan proses registrasi adalah terdapat point cloud yang saling bertampalan pada
scan world yang bersebelahan (Reshetyuk, 2009). Terdapat 4 metode yang digunakan
dalam proses registrasi point cloud, antara lain :
1. Metode target to target
Metode target to target merupakan metode registrasi dengan menggunakan
objek yang dapat diidentifikasi oleh point cloud TLS sebagai target. Metode ini
menggunakan pendekatan transformasi koordinat 3 dimensi dengan 6 parameter.
Proses transformasi 3 dimensi dengan 6 parameter dapat dilihat dalam persamaan
transformasi koordinat 3D pada persamaan I.5 dan I.6 (Wolf,1993).
X xo tx
Y = s R yo + ty
Z zo tz …………..………...(I.5)
R merupakan matriks rotasi yang terdiri dari 3 baris dan 3 kolom
m11 m12 m13
m21 m22 m23
m31 m32 m33 .………………………...(I.6)
Keterangan :
m11 = cos φ cos κ ω, φ, κ = parameter rotasi
m21 = -cos φ sin κ tx = translasi sumbu x
m31 = sin φ ty = translasi sumbu y
m12 = cos ω sin κ + sin ω sin φ cos κ tz = translasi sumbu z
m22 = cos ω cos κ - sin ω sin φ sin κ Xo, Yo, Zo = koordinat asal
m32 = - sin ω cos φ X, Y, Z = koordinat hasil
m13 = sin ω sin κ – cos ω sin φ cos κ
m23 = sin ω cos κ + cos ω sin φ sin κ
m33 = cos ω cos φ
Proses pada persamaan I.5 dan I.6 memerlukan minimal tiga buah target
yang teridentifikasi serta memiliki informasi koordinat x, y, dan z (3 dimensi).

16
Ketiga target tersebut harus teridentifikasi pada dua buah scan world yang
bersebelahan atau memiliki bagian yang saling bertampalan agar proses registrasi
dapat dilakukan (Reshetyuk, 2009). Persentase minimal daerah pertampalan yang
diperlukan untuk melakukan proses registrasi tidak diperlukan karena proses
registrasi berdasarkan target yang teridentifikasi. Gambaran mengenai metode
registrasi point clouds target to target diilustrasikan pada gambar 1.10.
Gambar I. 10. Ilustrasi metode registrasi target to target
(Reshetyuk, 2009)
Secara umum terdapat dua macam target yang sering digunakan pada
pengukuran menggunakan TLS yaitu flat target dan 3D Shapes target. Flat target
merupakan target berupa bidang datar. Bidang datar yang digunakan dalam
akuisisi data berupa checkerboard.
3D shapes target merupakan target yang berbentuk 3 dimensi. Target
berupa sebuah bola atau spherical dengan ukuran tertentu. Pada saat penyiaman,
bola tersebut akan tersusun oleh point cloud yang membentuk bola sehingga dapat
teridentifikasi sebagai target. Penggunaan target 3D shapes target lebih
menguntungkan daripada menggunakan flat target. Hal tersebut dikarenakan
proses identifikasi target 3D lebih mudah.
2. Metode Cloud to cloud
Metode registrasi cloud to cloud sangat dipengaruhi oleh liputan point
cloud yang saling bertampalan. Semakin luas daerah pada point clouds yang

17
bertampalan maka hasil registrasi akan semakin akurat. Umumnya, syarat daerah
liputan yang saling bertampalan adalah sekitar 30% bagian point cloud pada satu
scan world bertampalan dengan scan world lainnya. Syarat tersebut bukanlah
syarat mutlak yang harus dipenuhi untuk melakukan registrasi. Persentase daerah
bertampalan dapat berubah oleh dua alasan yaitu karakteristik objek penyiaman
dan kerapatan titik hasil penyiaman. Daerah yang dipenuhi oleh objek yang
homogen dan tidak permanen, persentase daerah pertampalan harus lebih besar
dari 30%. Daerah tidak permanen antara lain semak-semak, rumput, pepohonan,
ataupun objek yang bergerak.
Pengaturan kerapatan titik penyiaman merupakan hal yang harus
diperhatikan. Hasil registrasi akan lebih baik apabila kerapatan titik pada point
cloud tergolong rapat. Kerapatan titik akan membantu proses registrasi dalam hal
menambah jumlah titik ikat. Ilustrasi registrasi metode cloud to cloud digambarkan
pada gambar I.11.
Gambar I. 11. Ilustrasi registrasi metode cloud to cloud (Reshetyuk, 2009)
Gambar I.14 merupakan ilustrasi registrasi menggunakan metode cloud to
cloud pada bangunan yang diperoleh dari dua scan world. Daerah bertampalan
digambarkan dengan warna hijau dan biru. Kedua daerah bertampalan tersebut
teregistrasi menampilkan kenampakan objek gedung.
Metode registrasi cloud to cloud memiliki keunggulan dibandingkan
dengan metode target to target dalam hal efektifitas waktu akuisisi data. Proses
akuisisi data tidak perlu memperhatikan posisi target yang diletakkan dengan
penuh perhitungan (Al Adevan, 2016). Kelemahan metode cloud to cloud terletak
pada waktu pengolahan data. Metode registrasi clouds to clouds memerlukan

18
waktu yang lebih lama dibandingkan metode target to target. Waktu yang
dibutuhkan lebih lama karena pada saat proses registrasi diperlukan proses iterasi
yang dilakukan beberapa kali. Ilustrasi proses registrasi menggunakan metode
cloud to cloud dengan beberapa iterasi digambarkan pada gambar I.12.
Gambar I. 12. Ilustrasi proses registrasi metode cloud to cloud dengan iterasi
(Reshetyuk, 2009)
Gambar I.12 menjelaskan proses iterasi yang terjadi pada saat melakukan
registrasi metode cloud to cloud dalam empat tahap. Tahap pertama merupakan
titik-titik pada dua buah scan world yang saling terpisah. Tahap dua dilakukan
proses registrasi iterasi pertama yang menghasilkan kedua bagian titik tersebut
sudah saling mendekati. Tahap tiga dilakukan iterasi kembali untuk
menyempurnakan hasil registrasi. Point clouds sudah saling bertampalan pada
tahap empat walaupun pertampalan belum sempurna. Diperlukan iterasi yang
dilakukan lagi agar hasil registrasi menjadi sempurna.
3. Metode Traverse/polygon
Metode traverse/poligon merupakan proses registrasi point clouds pada
saat akuisisi data. Pada saat akuisisi data, alat didirikan pada suatu titik kontrol
tanah yang sudah diketahui koordinatnya dan memerlukan backsight untuk
menyamakan orientasinya. Metode poligon menghasilkan point cloud yang sudah
teregistrasi satu sama lain dan memiliki nilai koordinat tanah.
Syarat utama dalam menggunakan metode registrasi traverse adalah
terdapat kerangka kontrol pemetaan. Prinsip dasar metode traverse sama dengan
prinsip pengukuran detil pada pengukuran menggunakan total station dimana
memerlukan kerangka kontrol pemetaan sebagai tempat berdiri alat dan sebagai
backsight. Adapun ilustrasi registrasi metode traverse terdapat pada gambar I.13.

19
Gambar I. 13. Ilustrasi registrasi metode traverse.
4. Metode kombinasi
Metode kombinasi merupakan metode registrasi menggunakan beberapa
metode. Pada umumnya metode kombinasi dilakukan dengan mengkombinasikan
proses registrasi point clouds metode target to target dengan metode cloud to
cloud. Hal ini dilakukan apabila pada saat melakukan proses registrasi metode
target to target terdapat target yang tidak terdeteksi oleh perangkat lunak karena
sebab tertentu. Metode cloud to cloud digunakan untuk menyempurnakan proses
registrasi tersebut.
Metode kombinasi juga dilakukan pada metode traverse dengan keadaan
tertentu. Keadaan yang paling umum terjadi adalah jika pada saat penyiaman laser
scanner tidak terdapat kerangka kontrol pemetaan, tetapi hanya terdapat sepasang
titik bench mark. Scan world hasil penyiaman dengan acuan titik bench mark
kemudian di registrasi dengan scan world lain dengan metode target to target atau
cloud to cloud.
Metode registrasi target to target dan metode registrasi cloud to cloud pada
dasarnya menggunakan prinsip Iteractive Closest Point (ICP). Iteractive Closest Point
merupakan prinsip menghitung korespodensi antara dua buah scan world serta
menghitung besaran transformasi untuk meminimalisasi jarak antar titik yang saling
terkorespodensi (Segal, 2009)

20
I.6.10. Total Station (TS)
Total station merupakan sebuah alat atau instrumen optis yang digunakan
dalam pengukuran sudut dan jarak. Total station adalah teodholite yang terintegrasi
dengan alat ukur jarak elektronik atau electronic distance meter (EDM) dimana EDM
merupakan bagian terpenting dari sebuah total station (Basuki, 2011). Total station
dapat digunakan untuk menentukan posisi suatu titik pengukuran dengan cara
menghasilkan nilai koordinat titik tersebut. Cara kerja total station untuk
menghasilkan nilai koordinat adalah dengan cara mengukur jarak dan sudut suatu titik
atau target dengan acuan titik berdiri alat. Konsep perhitungan koordinat
menggunakan alat total station sama dengan konsep pengukuran alat terrestrial laser
scanner. Rumus penentuan nilai koordinat suatu titik yang diamati menggunakan total
station menggunanakan rumus I. 2, I. 3, dan I. 4 yang sudah dijabarkan sebelumnya.
Pengukuran jarak pada total station menggunakan konsep pengukuran jarak
elektronik. Konsep dasar pengukuran jarak elektronik terdapat 4 macam (Basuki,
2011) , yaitu :
a) Metode pulsa
b) Metode beda fase
c) Metode dopler
d) Metode interferometri
Metode yang pengukuran jarak yang digunakan pada alat total station adalah metode
beda fase. Metode beda fase merupakan metode pengukuran jarak dengan
menggunakan gelombang elektromagnetik yang dipancarkan oleh alat yang didirikan
pada posisi tertentu menuju suatu objek atau reflektor. Jarak diperoleh dari perhitungan
waktu perambatan sinyal elektomagnetik menuju reflector dan pantulan sinyal tersebut
sampai diterima kembali oleh alat. Waktu tersebut kemudian dikalikan oleh cepat
rambat gelombang yang dipancarkan oleh alat. Secara umum, konsep pengukuran
jarak pada alat total station dapat dihitung menggunakan rumus I.1.
Pengukuran jarak dan sudut menggunakan instrumen Total Station memiliki
dua syarat yang harus dipenuhi. Syarat tersebut yaitu syarat statis dan syarat dinamis.
Syarat statis adalah syarat penggunaan instrumen Total Station yang perlu dilakukan
satu kali sebelum melakukan pekerjaan. Pengecekan ini dilakukan untuk mengetahui
kondisi instrumen yang akan digunakan. Syarat statis instrumen Total Station terdiri

21
atas pengecekan kesalahan kolimasi dan kesalahan indeks vertikal. Kesalahan
kolimasi adalah kesalahan bacaan arah horizontal pada instrumen Total Station yang
disebabkan oleh garis bidik yang tidak tegak lurus dengan sumbu II.
Perhitungan kesalahan kolimasi dilakukan menggunakan rumus I.7 dengan
menghitung selisih bacaan arah horizontal saat keadaan teropong biasa dan saat
keadaan teropong luar biasa (Basuki, 2011).
𝛽 =(𝐿𝐵−𝐵)−180
2……………………………………………………………I. 7
Keterangan :
β = Kesalahan sudut kolimasi
LB = Bacaan arah horizontal saat keadaan teropong luar biasa
B = Bacaan arah horizontal saat keadaan teropong biasa
Kesalahan indeks vertikal yaitu kesalahan bacaan arah secara vertikal
instrumen Total Station pada saat kondisi teropong biasa dan luar biasa apabila di
jumlahkan hasilnya tidak 360 derajad. Kesalahan indeks vertikal terjadi karena kondisi
garis bidik teropong tidak mendatar. Perhitungan kesalahan indeks vertikal dilakukan
menggunakan rumus I.8 (Basuki, 2011).
𝛼 =360−(𝐵+𝐿𝐵)
2………………………………………………………… I. 8
Syarat dinamis merupakan syarat penggunaan instrumen Total Station yang
dilakukan setiap mendirikan instrumen sebelum digunakan. Syarat dinamis
penggunaan instrumen Total Station terdiri atas centering dan pengaturan sumbu I
vertikal.
I.6.11. Uji Statistik
Uji statistik merupakan uji yang dilakukan terhadap sampel data ukuran
dengan data lain yang dianggap benar untuk memperoleh nilai ketelitian hasil ukuran.
Terdapat banyak metode perhitungan uji statistik. Beberapa diantaranya adalah uji
nilai root mean square error (RMSE) dan menggunakan nilai simpangan baku dari
data sampel.
Uji nilai RMSE dilakukan dengan menghitung selisih hasil hitungan jarak yang
dianggap benar dan jarak produk pengolahan data. RMSE merupakan nilai akar dari
rata-rata selisih hitungan data antara data yang dianggap benar dengan data hasil
pengolahan. Hasil perhitungan RMSE merupakan tingkat ketelitian data. Semakin

22
besar nilai RMSE maka semakin rendah tingkat akurasinya. Perhitungan nilai RMSE
dapat menggunakan persamaan I.9.
RMSE = √∑(D)2
n ……………………………………………………………(I. 9)
Dengan:
𝐷 = |𝑅 − 𝑅1|..........................................................................................(I.10)
Keterangan:
RMSE : Root Mean Square Error
D : Selisih nilai ukuran
R : Nilai yang dianggap benar
R1 : nilai hasil ukuran
n : banyak ukuran yang digunakan
Standar deviasi merupakan nilai yang digunakan untuk menentukan persebaran
atau variasi kelompok data sampel. Standar deviasi dilakukan untuk mengetahui
seberapa dekat data individu terhadap nilai rata-rata data sampel (Widjayanti, 2011).
Perhitungan simpangan baku dapat dilakukan dengan menggunakan rumus :
𝑆∆𝑙 = √∑ ( ∆𝑙𝑖 − ∆𝑙𝑟𝑎𝑡𝑎−𝑟𝑎𝑡𝑎 ) 2
𝑛−1 ............................................................... (I.11)
Dengan ∆𝑙 rata-rata adalah rata-rata selisih nilai jarak dua metode pengukuran yang
dihitung menggunakan rumus:
∆𝑙 rata-rata = ∑ ∆𝑙
𝑛 ..................................................................................... (I.12)
Keterangan:
∆𝑙𝑖 : beda jarak dua metode pengukuran
∆𝑙𝑟𝑎𝑡𝑎−𝑟𝑎𝑡𝑎 : rata-rata beda jarak dua metode pengukuran
𝑆∆𝑙 : simpangan baku beda jarak
𝑛 : jumlah data