BAB I PENDAHULUAN -...
23
1 BAB I PENDAHULUAN I. 1. Latar Belakang Pemetaan situasi skala besar pada umumnya dilakukan secara teristris yang memerlukan kerangka peta biasanya berupa poligon. Persebaran titik-titik poligon diusahakan merata di daerah yang akan dilakukan pemetaan. Titik-titik poligon ini digunakan sebagai titik kontrol/ikat dalam pengukuran detil. Umumnya kerangka peta yang digunakan untuk pemetaan situasi dibagi menjadi dua macam, yaitu kerangka kontrol horisontal dan vertikal. Kerangka kontrol horisontal untuk mengontrol posisi-posisi detil horisontal (planimetris), sedangkan kerangka kontrol vertikal untuk mengontrol posisi detil tinggi. Kerangka kontrol horisontal biasanya diukur menggunakan Teodolit/Total Station, sedangkan kerangka kontrol vertikal diukur menggunakan waterpas.. Seiring perkembangan ilmu dan teknologi saat ini, metode pemetaan tidak hanya dapat dilakukan secara teristris, namun sudah merambah pada wahana berbasis teknologi satelit (Basuki, 2006). Salah satu teknologi penentuan posisi berbasis satelit yaitu GNSS (Global Navigation Satellite System) metode RTK (Real Time Kinematic) Radio. RTK merupakan metode yang berbasiskan pada carrier phase dalam penetuan posisi tiga dimensi (X,Y,Z) secara relatif dengan tingkat ketelitian mencapai satuan sentimeter secara real time. Penentuan posisi dengan metode RTK GNSS menawarkan hasil yang lebih cepat karena perhitungan dilakukan sesaat pada saat pengukuran (real time) dengan ketelitian posisi yang tinggi. Konsep penentuan posisi metode RTK membutuhkan Base Station dan Rover Station. RTK GNSS mensyaratkan stasiun referensi (Base Station) di setting pada lokasi yang koordinatnya telah didefinisikan ke sistem koordinat tertentu. Receiver GNSS yang di setting pada Base Station berfungsi untuk memancarkan sinyal koreksi RTCM ke Rover station yang beroperasi pada frekuensi UHF selama pelaksanaan survei Real Time Kinematic. Berdasarkan dari kelebihan sistem RTK tersebut, menjadikan teknologi ini dapat diterapkan dalam berbagai aplikasi bidang. Bidang pertambangan
Transcript of BAB I PENDAHULUAN -...

1
BAB I
PENDAHULUAN
I. 1. Latar Belakang
Pemetaan situasi skala besar pada umumnya dilakukan secara teristris yang
memerlukan kerangka peta biasanya berupa poligon. Persebaran titik-titik poligon
diusahakan merata di daerah yang akan dilakukan pemetaan. Titik-titik poligon ini
digunakan sebagai titik kontrol/ikat dalam pengukuran detil. Umumnya kerangka
peta yang digunakan untuk pemetaan situasi dibagi menjadi dua macam, yaitu
kerangka kontrol horisontal dan vertikal. Kerangka kontrol horisontal untuk
mengontrol posisi-posisi detil horisontal (planimetris), sedangkan kerangka kontrol
vertikal untuk mengontrol posisi detil tinggi. Kerangka kontrol horisontal biasanya
diukur menggunakan Teodolit/Total Station, sedangkan kerangka kontrol vertikal
diukur menggunakan waterpas..
Seiring perkembangan ilmu dan teknologi saat ini, metode pemetaan tidak
hanya dapat dilakukan secara teristris, namun sudah merambah pada wahana berbasis
teknologi satelit (Basuki, 2006). Salah satu teknologi penentuan posisi berbasis
satelit yaitu GNSS (Global Navigation Satellite System) metode RTK (Real Time
Kinematic) Radio. RTK merupakan metode yang berbasiskan pada carrier phase
dalam penetuan posisi tiga dimensi (X,Y,Z) secara relatif dengan tingkat ketelitian
mencapai satuan sentimeter secara real time. Penentuan posisi dengan metode RTK
GNSS menawarkan hasil yang lebih cepat karena perhitungan dilakukan sesaat pada
saat pengukuran (real time) dengan ketelitian posisi yang tinggi. Konsep penentuan
posisi metode RTK membutuhkan Base Station dan Rover Station. RTK GNSS
mensyaratkan stasiun referensi (Base Station) di setting pada lokasi yang
koordinatnya telah didefinisikan ke sistem koordinat tertentu. Receiver GNSS yang
di setting pada Base Station berfungsi untuk memancarkan sinyal koreksi RTCM ke
Rover station yang beroperasi pada frekuensi UHF selama pelaksanaan survei Real
Time Kinematic.
Berdasarkan dari kelebihan sistem RTK tersebut, menjadikan teknologi ini
dapat diterapkan dalam berbagai aplikasi bidang. Bidang pertambangan

2
menggunakan sistem RTK ini untuk penentuan volume stockpile batubara.
Penggunaan RTK Radio GNSS dapat mempercepat proses pengukuran volume
stockpile batubara, ini dikarenakan lokasi stockpile batubara terletak pada area
terbuka sehingga pengukuran titik-titik spotheight dapat diambil dengan kerapatan
yang tinggi. Kerapatan data pengukuran yang tinggi akan berpengaruh terhadap
proses penentuan volume stockpile batubara, sehingga volume stockpile dapat
ditentukan secara tepat. Selain itu aplikasi RTK ini dapat diterapkan untuk penetuan
posisi titik-titik batas persil tanah yang terletak di area relatif terbuka. Penggunaan
metode RTK ini memiliki kelebihan yaitu ketelitian yang tinggi dalam fraksi
sentimeter. Keuntungan lainnya yaitu penentuan posisi titik-titik batas persil tanah
dapat dilakukan secara cepat dibandingkan dengan pengukuran teristris. Koordinat
titik-titik batas persil tanah juga akan berada dalam suatu sistem koordinat nasional
dan memudahkan perhitungan luas terutama untuk persil tanah yang luas serta
memiliki bentuk yang tidak terlalu teratur. Selain itu juga penggunaan RTK Radio
GNSS akan memudahkan dalam proses rekonstruksi titik-titik batas persil tanah.
Berkaitan dengan pemetaan situasi, menarik untuk dilakukan kegiatan aplikatif
pemetaan situasi skala besar menggunakan RTK Radio GNSS. Penggunaan RTK
Radio GNSS selain mempunyai kelebihan seperti yang dikemukakan diatas juga
memiliki kekurangan dalam proses akuisisi data, terutama untuk area yang
mempunyai obstruksi yang rapat. Menurut penelitian yang telah dilakukan Veronika
(2010), jangkauan dari sinyal koreksi RTK Radio GNSS yang dikirimkan dari base
station ke rover memiliki jarak efektif maksimal 1,5 km. Lokasi pengukuran terletak
di Dusun Klepu, Desa Banjararum, Kulon Progo, Yogyakarta. Lokasi ini dipilih
karena memiliki kondisi topografi beragam yang terdiri dari area yang relatif datar
sampai area yang berbukit dan memiliki detil terrain yang cukup variatif diantaranya
selokan, jalan, bangunan, dan kandang ayam. Kondisi obstruksi pada area
pengukuran juga bervariasi sehingga akan berpengaruh terhadap ketelitian hasil
pengukuran. Berdasarkan kondisi lokasi tersebut maka akan dilakukan pengkajian
aplikasi RTK Radio GNSS untuk akuisisi data dalam pemetaan situasi skala besar.

3
I.2. Lingkup Kegiatan
Dalam kegiatan aplikatif ini, penulis akan membatasi permasalahan yang ada
dengan menggunakan kriteria sebagai berikut:
1. Lokasi penelitian di Dusun Klepu, Desa Banjararum, Kecamatan
Kalibawang, Kabupaten Kulon Progo, Yogyakarta.
2. Metode penentuan posisi yang digunakan dalam pengukuran adalah
penentuan posisi GNSS metode RTK-Radio.
3. Sistem koordinat yang dipakai adalah UTM dengan elipsoid referensi WGS
1984.
4. Tinggi yang dihasilkan dari pengukuran ini adalah tinggi lokal.
5. Pengamatan dilakukan menggunakan receiver double frekuensi GNSS
Topcon GR-3 dan Topcon Hiper II dengan sudut elevasi minimum satelit 150.
6. Lokasi penelitian yang dipilih meliputi daerah yang terbuka dan daerah yang
memiliki banyak obstruksi lingkungan.
7. Lokasi penelitian memiliki topografi terrain yang bervariasi.
I.3. Tujuan
Kegiatan aplikatif ini memiliki tujuan :
1. Menguji kemampuan akuisisi data RTK Radio GNSS dalam pemetaan situasi
skala 1:1000 berdasarkan tingkat kerapatan obstruksi lingkungan.
2. Menguji ketelitian peta situasi yang dihasilkan dari pengukuran RTK Radio
GNSS terhadap spesifikasi teknis standar ketelitian peta yang disyaratkan
dalam SNI.
I.4. Manfaat
Manfaat dari kegiatan aplikatif ini akan dihasilkan suatu prosedur pembuatan
peta situasi dengan RTK Radio GNSS dan diharapkan dapat digunakan sebagai
tinjauan dalam pengukuran dan pemetaan situasi menggunakan GNSS metode RTK
Radio kedepannya. Karena hasil pengukuran dan pemetaan situasi menggunakan
GNSS memberikan manfaat yang besar terutama untuk pemetaan situasi secara cepat
dengan hasil ketelitian yang relatif tinggi.

4
I.5. Landasan Teori
I.5.1. Pemetaan Situasi
Pemetaan situasi merupakan pemetaan dari suatu lokasi/daerah mencakup
penyajian dalam bentuk horizontal dan vertikal dalam suatu gambaran. Peta situasi
merupakan peta yang merepresentasikan kondisi permukaan bumi yang sebenarnya
dengan skala tertentu, termasuk bentukan-bentukan alamiah maupun buatan (Davis,
1981). Pengukuran dilakukan terhadap semua benda/titik-titik benda, baik yang
berupa unsur buatan manusia maupun unsur alam. Kondisi permukaan bumi pada
peta situasi direpresentasikan dengan menggunakan garis-garis kontur. Pengukuran
horizontal dan vertikal serta detil disebut juga pengukuran situasi. Jumlah detil unsur
situasi yang diukur harus betul-betul representatif, oleh sebab itu kerapatan letak
detail harus selalu dipertimbangkan terhadap bentuk unsur situasi serta skala dari
peta yang akan dibuat.
Garis kontur adalah garis khayal dilapangan yang menghubungkan titik dengan
ketinggian yang sama, garis kontur dapat diartikan juga sebagai garis kontinyu diatas
peta yang memperlihatkan titik-titik dengan ketinggian yang sama. Garis kontur
disajikan dipeta untuk memperlihatkan naik turunnya keadaan permukaan tanah.
Kegunaan yang lain dari garis kontur adalah untuk memberikan informasi slope
(kemiringan tanah), irisan profil memanjang atau melintang permukaan tanah, dan
perhitungan galian serta timbunan. Interval kontur adalah selisih tinggi atau jarak
vertikal antara dua buah garis kontur yang berurutan. Besarnya interval kontur secara
umum dinyatakan dengan rumus 1/2000 x angka penyebut skala (dalam meter).
Garis kontur mempunyai beberapa sifat antara lain (Basuki, 2006) :
1. Tidak berpotongan
2. Tidak bercabang
3. Tidak bersilangan
4. Semakin jarang menunjukkan daerah yang semakin datar
5. Semakin rapat menunjukkan daerah yang semakin curam
6. Tidak berhenti didalam peta.

5
I.5.2. SNI Peta Topografi
Spesifikasi ketelitian peta topografi terdapat didalam SNI (Standar Nasional
Indonesia) No. 19-6502.2-2000. SNI ini merupakan tindak lanjut dari Undang-
undang Nomor 22 tahun 1999 tentang Otonomi Daerah pasal 7 ayat 2 yang
menyatakan bahwa standar teknis pemetaan topografi ini dirumuskan oleh
Bakosurtanal dengan penanggung jawab pusat data dan Informasi Geografi Nasional
(Pusdignas). Datum yang digunakan di dalam peta topografi adalah Datum Geodesi
Nasional 1995 (DGN-95) yang berparameter elipsoid sama dengan World Geodetic
System 1984 (WGS-84), yaitu:
a = 6.378.137,0 meter
f = 1/298,257223563.
Dalam hal ini, a: setengah sumbu panjang elips dan f: flattening (penggepengan
elips). Proyeksi peta yang digunakan adalah Universal Transverse Mercator (UTM).
Sistem koordinat grid mengikuti sistem grid Universal Transverse Mercator (UTM).
Interval kontur adalah 0,5 m dan indeks kontur digambarkan tiap empat selang
kontur. Grid peta hanya ditunjukkan dengan UTM tick setiap interval 20 cm. Untuk
ketelitian peta dinyatakan bahwa spesifikasi ketelitian horizontal jika dilakukan uji
ketelitian adalah 0,3 mm dikali skala peta dan dibandingkan dengan hasil hitungan
koordinat pengukuran yang diuji di lapangan. Untuk spesifikasi ketelitian
vertikal/kontur ketelitian adalah 0,5 dikali skala peta, dan jika dilakukan uji ketelitian
tinggi tidak boleh lebih dari 10% titik-titik yang diuji memiliki kesalahan lebih dari
0,5 mm dikali skala peta.
I.5.3. GPS
GPS (Global Positioning System) adalah sistem navigasi dan penentuan posisi
berbasis satelit yang dapat digunakan oleh banyak orang sekaligus dalam segala
cuaca, serta didesain untuk memberikan posisi dan kecepatan tiga-dimensi yang
teliti, dan juga informasi waktu secara kontinyu di seluruh dunia (Abidin, 2000).
GPS pertama kali dikembangkan oleh Departemen Pertahanan Amerika Serikat.
Satelit-satelit GPS (24 satelit) beredar dalam 6 bidang orbit mengelilingi bumi, yang
terletak jauh di atas permukaan bumi yaitu pada ketinggian sekitar 20.200 km. Satelit
tersebut berputar mengelilingi bumi dengan periode orbit 11 jam 58 menit.

6
GPS telah banyak dimanfaatkan dalam berbagai bidang aplikasi, termasuk
untuk keperluan survei dan pemetaan. Prinsip dasarnya sinyal yang dipancarkan GPS
berfungsi untuk memberikan informasi tentang posisi satelit yang diamat, jarak ke
satelit, wakru, dan informasi kesehatan satelit.Pada dasarnya GPS terdiri dari tiga
segmen utama, yaitu segmen angkasa (space segment) yang terdiri dari satelit-satelit
GPS, segmen sistem kontrol (control system segment) yang terdiri dari stasiun-
stasiun pemonitor dan pengontrol satelit, dan segmen pemakai (user segment) yang
terdiri dari pemakai GPS termasuk alat-alat penerima dan pengelola sinyal dan data
GPS.
Dalam penentuan posisi dengan GPS, ketelitian posisi yang di dapat tergantung
pada 4 faktor yaitu (Abidin, 2003):
1. Metode penentuan posisi yang digunakan.
2. Geometri dan distribusi dari satelit yang diamati.
3. Ketelitian data yang digunakan.
4. Metode pengolahan data yang diterapkan.
I.5.3.1. Sinyal GPS
Dalam Prinsip GPS secara umum, satelit GPS memancarkan sinyal berfungsi
memberikan informasi tentang posisi satelit yang diamat, jarak satelit ke receiver,
dan waktu, serta dapat juga untuk memberikan informasi mengenai kesehatan satelit.
Sinyal GPS dibagi atas tiga komponen, yaitu (Abidin, 2000) :
1. Komponen penginformasi jarak (kode), didalamnya terdapat dua kode
Pseudo-Random Noise (PRN) yang dikirim oleh satelit dan digunakan
sebagai penginformasi jarak, yaitu kode-P (P = Precise atau Private) dan
kode-C/A (C/A = Coarse Acuisition). Kode-P(Y) dengan frekuensi 10.23
Mhz dan kode-C/A dengan frekuensi 1.023 Mhz. Kode ini terdiri dari
rangakaian bilangan biner (1 dan 0) yang mempunyai struktur yang unik dan
berbeda untuk setiap satelit GPS, sehingga receiver GPS dapat mengamati
dan membedakan sinyal-sinyal yang datang dari satelit yang berbeda. Dengan
mengamati kode-P(Y) atau kode-C/A jarak dari pengamat ke satelit dapat
ditentukan. Prinsip pengukuran jarak yang digunakan adalah dengan

7
membandingkan kode yang diterima dari satelit dengan kode replika yang
diformulasikan di dalam receiver.
2. Komponen penginformasi posisi satelit (Navigation message), memberikan
informasi tentang posisi dan kesehatan satelit juga informasi-informasi
lainnya seperti koefisien koreksi jam satelit, parameter orbit, almanak satelit,
parameter koreksi ionosfer, dan informasi kesehatan satelit. Pesan navigasi
tersebut ditentukan oleh segmen sistem kontrol dan dikirimkan ke pengguna
menggunakan satelit GPS. Struktur pesan navigasi GPS dapat digambarkan
sebagai berikut.
Gambar I.1. Prinsip penentuan jarak dengan kode (Abidin, 2000)
(Abidin,2000)
Gambar I.2. Format pesan navigasi GPS (Abidin, 2000)

8
3. Komponen gelombang pembawa (carrier wave), terdiri dari dua buah
gelombang pembawa yaitu L1 (λ= 19.05 cm) dan L2 (λ= 24.25 cm) yang
bertugas membawa kode dan pesan navigasi dari satelit ke pengamat.
Gelombang L1 membawa kode-P(Y), kode-C/A, dan pesan navigasi,
sedangkan gelombang L2 membawa kode-P(Y) dan pesan navigasi.
I.5.3.2. Sistem Koordinat GPS
Koordinat yang dihasilkan dari pengamatan satelit GPS adalah koordinat tiga
dimensi (X,Y,Z maupun φ,λ,h) yang mengacu pada datum WGS 1984. Karena
koordinat yang dihasilkan GPS mengacu pada datum WGS 1984, maka apabila
pengguna hendak menggunakan sistem koordinat dalam datum yang berbeda maka
harus dilakukan transformasi datum terlebih dahulu. Komponen tinggi dari koordinat
tiga dimensi yang diberikan oleh GPS adalah tinggi yang mengacu ke permukaan
ellipsoid, yaitu ellipsoid Geodetic Reference System (GRS) 1980 yang didefinisikan
dengan empat buah parameter utama yaitu :
1. Sumbu panjang (a) = 6378137 m
2. Koefisien harmonik (C20) = -484.16685 x 10-6
3. Kecepatan sudut rotasi bumi (ω) = 7292115 x 10-11
rad s-1
4. Konstanta gravitasi bumi (GM) = 3986005 x 108 m
3 s
-2
Gambar I.3. Isi pesan navigasi GPS (Abidin, 2000)

9
Sistem tinggi ellipsoid jarang digunakan untuk keperluan survei rekayasa
karena tidak mengacu pada dimensi fisik bumi (geoid). Untuk mentransformasikan
sistem tinggi ellipsoid ke sistem tinggi geoid dibutuhkan informasi tentang undulasi
geoid. Undulasi geoid adalah besar perbedaan antara tinggi ellipsoid dengan tinggi
orthometrik. Sistem tinggi orthometrik merupakan sistem tinggi yang mengacu pada
geoid, yaitu bidang ekuipotensial yang berhimpit dengan muka air laut rata-rata.
Sistem tinggi inilah yang umum digunakan sehari-hari untuk keperluan praktis.
I.5.4. GLONASS
Seperti halnya GPS, satelit GLONASS juga didesain untuk dapat memberikan
posisi, kecepatan, dan waktu dimana saja di permukaan bumi pada setiap saat tanpa
tergantung cuaca. Prinsip penentuan posisi menggunakan sistem ini juga pada
dasarnya sama dengan GPS, yaitu dengan mengukur jarak ke beberapa satelit
sekaligus. Seperti halnya GPS, sistem GLONASS didesain untuk operasional dengan
24 satelit. Pada sistem GLONASS ke 24 satelitnya ditempatkan dalam tiga bidang
orbit dengan inklinasi sekitar 64,80 dan masing-masing 8 satelit untuk setiap
orbitnya. Orbit satelit sekitar 1000 km lebih rendah dari orbit GPS.
Tabel I.1. Perbandingan antara GPS dan GLONASS (Seeber, 2003)
Parameter GPS GLONASS
Bidang Orbit 6 buah, dengan spasi 600
3 buah, dengan spasi 1200
Jumlah satelit tiap
orbit
4 buah, dengan spasi tidak
sama
8 buah, dengan spasi sama
Inklinasi Orbit 550
64,80
Radius Orbit 26.560 km 25.510 km
Ketinggian Orbit
Periode Orbit 11 jam 58 menit 11 jam 16 menit
Eksentrisitas Orbit 0 (Lingkaran) 0 (Lingkaran)
Gelombang
Pembawa
L1 = 1575,42 Mhz
L2 = 1227,60 Mhz
L1 = (1602+9k/16) Mhz
L2 = (1246+7k/16) Mhz
k = nomor kanal (Channel)

10
Lanjutan tabel I.1.
Kode (Code) Berbeda untuk setiap satelit
Kode-C/A pada L1
Kode-P pada L1 dan L2
Sama untuk seluruh satelit
Kode-C/A pada L1
Kode-P pada L1 dan L2
Frekuensi Kode Kode-C/A = 1,023 Mhz
Kode-P = 10,23 Mhz
Kode-C/A = 0,511 Mhz
Kode-P = 5,11 Mhz
Data Jam (Clock) Clock offset, Frequency
offset, dan Frequency rate
Clock offset, Frequency offset
Data Orbital Elemen orbital Keplerian
dan parameter Pertubasinya
Koordinat, kecepatan, dan
percepatan satelit
Sistem Koordinat Earth-Centered Earth Fixed
(ECEF)
Earth-Centered Earth Fixed
(ECEF)
Datum Geodetik World Geodetic System
1984 (WGS 84)
Earth Parameter System 1990
(PZ-90)
Referensi Waktu UTC (USNO) UTC (SU)
Pada saat ini kedua sistem GPS dan GLONASS digunakan secara bersama-
sama. Saat konstelasi satelit GLONASS lengkap, maka kita akan mempunyai 48
satelit navigasi (24 satelit GPS dan 24 satelit GLONASS). Dengan demikian jumlah
satelit yang dapat teramat menjadi lebih banyak, geometri satelit akan menjadi lebih
baik dan ketelitian dari parameter yang diestimasi akan menjadi lebih baik.
Koordinat yang diberikan oleh sistem GPS dan GLONASS mempunyai datum
geodetik yang berbeda, maka rumus transformasi koordinat antara kedua sistem
adalah sebagai berikut.
.......................(1.1)
Dengan parameter transformasinya menurut (Bazlov et al., 1999) adalah
sebagai berikut :
dX = -1,08 + 0,21 m RX = 0
dY = -0,27 + 0,21 m RY = 0
dZ = -0,90 + 0,33 m RZ = -0,16” + 0,01 “
ds = -0,21 + 0,06 ppm

11
I.5.5. Metode Penentuan Posisi dengan GNSS
Metode penentuan posisi dengan GNSS dibagi atas dua macam, yaitu metode
penentuan posisi secara absolut dan penentuan posisi secara diferensial.
I.5.5.1. Penentuan Posisi GNSS Secara Absolut
Metode penentuan posisi secara absolut atau juga dikenal juga dengan point
positioning merupakan penentuan posisi suatu titik secara mandiri dimana posisi
suatu titik direferensikan terhadap pusat dari sistem koordinat. Prinsip dasar
penentuan posisinya adalah pengikatan ke belakang dengan mengukur jarak ke
beberapa satelit sekaligus. Diperlukan minimal 4 satelit untuk dapat menentukan
posisi suatu titik, sehingga diperoleh 4 parameter yang terdiri dari 3 koordinat (X, Y,
Z) atau (φ ,λ, h) dan 1 parameter waktu. Dalam hal ini posisi ditentukan dalam sistem
WGS 1984 terhadap pusat massa bumi. Dalam metode ini, posisi yang akan
ditentukan bisa dalam keadaan diam maupun dalam keadaan bergerak. Karena titik
yang akan ditentukan posisinya tidak tergantung pada titik lain yang berarti juga
tidak dilakukan pengamatan di titik lain, maka receiver GPS yang digunakan hanya
satu buah.
Ketelitian posisi yang diperoleh dari metode ini rendah karena ketelitian posisi
titik tergantung pada ketelitian data serta geometri satelit. Data posisi yang diperoleh
masih terpengaruh oleh bias dan kesalahan. Oleh karena itu metode penentuan posisi
absolut tidak digunakan untuk menentukan posisi yang membutuhkan ketelitian
tinggi.
Metode penentuan posisi secara absolut pada prinsipnya adalah reseksi dengan
jarak ke beberapa satelit secara simultan. Jarak hasil hitungan oleh receiver GPS
diperoleh dari data ukuran rambat sinyal dari satelit ke receiver. Metode pendekatan
yang dilakukan pada penentuan posisi dengan metode absolut ini adalah metode
pendekatan pseudorange.
I.5.5.2. Penentuan Posisi GNSS Secara Diferensial
Penentuan posisi secara diferensial adalah penentuan vektor jarak antara dua stasiun
pengamatan, yang dikenal dengan jarak basis atau baseline (Sunantyo, 2000).
Penentuan posisi secara diferensial yaitu menentukan posisi dua atau lebih titik di

12
lapangan yang dilakukan secara bersamaan dalam rentang waktu yang sama. Untuk
metode ini diperlukan minimal dua unit receiver dan satu software GPS pengolah
data. Pada penentuan posisi diferensial atau sering disebut dengan metode relatif,
posisi titik-titik yang diperoleh ditentukan terhadap titik lain yang telah diketahui
koordinatnya yang dianggap sebagai titik acuan. Data ukuran pengamatan yang
digunakan dalam penentuan posisi secara diferensial dapat berupa pseudorange
maupun carrier beat phase. Pada penentuan posisi teliti cenderung digunakan carrier
beat phase (Leick, 1995).
Pada metode differensial ini pengolahan datanya dilakukan secara post
processing. Kesalahan dan bias yang dominan pada pengamatan dapat tereliminir
dengan cara mengurangkan data yang diamati oleh dua receiver GNSS pada waktu
yang bersamaan, sehingga ketelitian yang dicapai meningkat drastis dibanding
dengan metode absolut.
Keterangan gambar I.4 :
O : Pusat sistem koordinat
φ, λ, h : Koordinat geodetik titik pengamat
Garis basis
Satelit 1 (GPS/GLONASS)
Satelit 2 (GPS/GLONASS)
Satelit 3 (GPS/GLONASS)
Satelit 4 (GPS/GLONASS)
Receiver P Receiver Q
Bidang ekuator bumi
O
X (+)
Y (+)
Z (+)
Meridian Greenwich
(Xp,Yp,Zp) (Xq,Yq,Zq)
p p
q
q
hq
N N
hp
R1
R1 R2
R3 R4 R2
R3
R4
Gambar I.4. Penentuan posisi diferensial
(X4,Y4,Z4) (X3,Y3,Z3) (X2,Y2,Z2)
(X1,Y1,Z1)
Orbit satelit 1 Orbit satelit 2
Orbit satelit 3
Orbit satelit 4
Xq
Yq
Zq
Zp
Yp Xp

13
Xq, Yq, Zq : Koordinat kartesian 3D titik Q
Xp, Yp, Zp : Koordinat kartesian 3D titik P
Xi, Yi, Zi : Koordinat Kartesian 3D satelit ke-i
N : Jari-jari kelengkungan vertikal
Ri : Jarak dari satelit ke receiver
Penentuan posisi diferensial pada dasarnya bertujuan untuk menentukan
koordinat sebuah titik yang belum diketahui dari sebuah titik yang sudah diketahui
koordinatnya. Dengan kata lain, penentuan posisi relatif diarahkan pada penentuan
vektor antara kedua titik yang seringkali disebut sebagai baseline. Misal P adalah
sebuah titik yang diketahui koordinatnya, sedangkan Q adalah titik yang belum
diketahui koordinatnya, dan bPQ adalah vektor baseline. Dengan menggunakan
vektor-vektor posisi XP, XQ, yang berhubungan dapat diformulasikan sebagai berikut
(Sunantyo, 2000):
XQ = XP + bPQ ........................................................................................................(1.2)
Dapat diformulasikan dan komponen vektor baseline bPQ menjadi :
PQ
PQ
PQ
PQ
PQ
PQ
PQ
Z
Y
X
ZZ
YY
XX
b
................................................................................(1.3)
I.5.6. RTK GNSS
RTK (Real Time Kinematic) merupakan metode berbasiskan pada carier phase
dalam penentuan posisi secara relatif dengan tingkat ketelitian mencapai satuan
sentimeter secara real time. Prinsip penentuan posisi secara RTK dengan cara
menggunakan satu stasiun penerima siyal (referensi/base station) dan beberapa rover
(receiver) yang dapat bergerak (mobile). Stasiun referensi penerima sinyal carrier
phase dan unit rover yang bergerak membandingkan pengukuran fase itu sendiri
dengan membandingkan pengukuran fase yang diterima dari stasiun referensi (base
stasion) sehingga nantinya didapat data koreksi yang dibutuhkan untuk

14
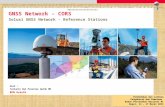
pengukurannya secara Real Time. Ada 3 komponen penting dalam pengukuran
menggunkan metode RTK (Abidin, 2000), yaitu :
1. Stasiun Referensi
Stasiun referensi atau base station ini terdiri dari receiver dan antenna.
Base station ini berfungsi untuk mengolah data differensial dan
melakukan koreksi carrier phase yang dikirimkan via radio modem base
station ke radio modem rover.
2. Stasiun Rover
Fungsi rover adalah untuk mengidentifikasi satelit-satelit pada daerah
pengamatan dan menerima data differensial dan koreksi carrier phase
dari base station. Cara kerja rover dalam melakukan pengukuran secara
RTK dengan cara menggerakkan rover (mobile) dari suatu titik ke titik
lainnya yang ingin diketahui posisinya. Koreksi carrier phase tersebut
dikirim via radio link dengan radio modem antara base station dan rover
sehingga bisa mendapatkan posisi yang lebih teliti.
3. Data Link (Hubungan data) Differensial
Data link ini berfungsi mengirimkan data differensial dan koreksi carrier
phase dari base station ke rover melalui radio modem. Kecepatan radio
modem dan band frekuensi pada base station dan rover harus sama
sehingga proses pengiriman data bisa lancar. Jenis-jenis band frekuensi
yang dimanfaatkan dalam survey GPS-RTK meliputi:
a. UHF (Ultra Height Frequency)
Bekerja pada frekuensi antara 300 Mhz sampai 3 Ghz dengan panjang
gelombang antara 10 cm sampai dengan 1m.
b. VHF (Very Height Frequency)
Bekerja pada frekuensi antara 30 Mhz sampai 300 Mhz dengan
panjang gelombang antara 1 m sampai dengan 10 m.
c. HF (Height Frequency)
Bekerja pada frekuensi antara 3 Mhz sampai 30 Mhz dengan panjang
gelombang antara 10 m sampai dengan 100 m.

15
Gambar I.5. Konsep pengukuran RTK GNSS (Atunggal, 2010)
Pengukuran pada metode RTK memiliki 3 jenis solusi pengukuran (Diggelen,
1997), yaitu:
1. Fixed
Sudah terhubung dengan base station, memiliki ketelitian posisi 1 sampai
dengan 5 cm, ambiguitas fase sudah terkoreksi, jumlah satelit yang
ditangkap lebih dari 4, bias multipath terkoreksi dan LQ( Link Quality)
100%.
2. Float
Sudah terhubung dengan base station, memiliki ketelitian posisi lebih dari
5 cm, ambiguitas fase belum terkoreksi, jumlah satelit yang ditangkap
kurang dari 4 (too few satellite), bias multipath belum terkoreksi
3. Standalone
Tidak terhubung dengan base station, memiliki ketelitian posisi lenbih
dari 1 m, ambiguitas fase belum terkoreksi secara deferensial, jumlah
satelit yang ditangkap kurang dari 4 (too few satellite), bias multipath
belum terkoreksi.
Sistem RTK berkembang setelah diperkenalkannya suatu teknik untuk
memecahkan ambiguitas fase di saat receiver dalam keadaan bergerak yang dikenal
dengan metode penentuan ambiguitas fase secara On The Fly (OTF) . Dengan adanya

16
radio modem sehingga proses pengiriman data atau koreksi fase dapat dilakukan
secara seketika membuat informasi posisi yang dihasilkan oleh sistem ini dapat
diperoleh secara seketika (Rahmadi, 1997). Ketelitian tipikal posisi yang diberikan
oleh system RTK adalah sekitar 1 sampai dengan 5 cm, dengan asumsi bahwa
ambiguitas fase dapat ditentukan secara benar (Abidin, 2000).
I.5.7. Model Matematis RTK GNSS
Model matematis pada metode RTK GNSS ini, menggunakan data carrier
phase sehingga memakai konsep pengukuran pergeseran fase. Ketelitian yang lebih
baik dalam pengukuran range ke satelit dapat dicapai dengan mengamati pergeseran
fase dari sinyal GNSS. Dalam pendekatan ini, pergeseran fase dari sinyal yang
terjadi dari saat dipancarkan oleh satelit, sampai diterima pada stasiun bumi. GNSS
menggunakan komunikasi satu arah, tetapi karena satelit bergerak maka range secara
otomatis akan berubah sehingga ambiguitas tidak dapat dihitung dengan memakai
frekuensi tambahan.
Ketika ambiguitas dihitung, model matematik untuk pergeseran fase pembawa
dibetulkan untuk bias jam adalah (Wellenholf,dkk,1992) :
….............………………………(1.4)
Keterangan :
t = waktu pada epoch tertentu
Фi j
(t) = pengukuran pergeseran fase pembawa antara satelit i dan penerima j
f j = frekuensi dari pancaran sinyal yang dihasilkan oleh satelit j
δ j
(t) = bias jam satelit j
λ = panjang gelombang sinyal
ρi j
(t) = range antara penerima i dan satelit j
Ni j = ambiguitas integer sinyal antara satelit j ke penerima i
δi(t) = bias jam penerima

17
Koordinat dari base station yang digunakan dalam pengamatan metode RTK
sudah diketahui. Sinyal satelit dipancarkan dari base station ke rover. Rover
menggunakan teknik relative positioning untuk menghitung posisi titik dari base
station. Pada proses relative positioning itu dimungkinkan menghitung dan
memancarkan koreksi pseudorange (PRC). Sesudah koreksi pseudorange dihitung,
kemudian rover mengkoreksi pseudorange-nya. Dengan mengalikan Persamaan (1.4)
dengan λ, dan memasukkan suku error orbital radial, pseudorange fase pembawa
pada base station A untuk satelit j pada epoch t0, maka dapat dirumuskan :
.................………….……..(1.5)
Di mana NjA adalah ambiguitas yang tak diketahui awalnya dan c adalah
kecepatan sinyal (kecepatan cahaya diruang hampa), serta semua suku lain yang
didefinisikan sebelumnya dalam Persamaan (1.6). Karena base station merupakan
titik yang diketahui koordinatnya, maka koreksi pseudorange pada epoch t0 adalah :
...........……………….........…...…....(1.6)
Kemudian koreksi pseudorange pada setiap epoch t dapat dirumuskan :
......................…………….......…………..(1.7)
Pada rumus 1.7, RRC adalah Range Rate Correction. Dengan prosedur yang
sama digunakan pada kode pseudorange, range phase terkoreksi rover untuk epoch t
dapat dirumuskan:
...………............................(1.8)
Persamaan-persamaan ini dapat diselesaikan jika trdapat minimal empat satelit
secara kontinyu diamati selama survei. Koreksi pseudorange dan koreksi laju range
dipancarkan ke penerima.

18
I.5.8. DOP (Dilution of Precision)
DOP (Dilution of Precision) merupakan nilai kekuatan bentuk geometri dari
konfigurasi satelit yang diamati. Karena posisi satelit senantiasa berubah terhadap
waktu, maka nilai DOP akan berubah terhadap waktu. DOP yang digunakan adalah
kecil. Semakin kecil nilai DOP (1-3) semakin baik konfigurasi satelitnya maka
ketelitian pengukuran akan semakin teliti dan semakin besar nilai DOP (4-8) maka
ketelitian pengukuran akan kurang teliti (Atunggal, 2010). Ketelitian posisi yang
diperoleh dari pengukuran GPS merupakan fungsi dari nilai DOP dan ketelitian
pengamatan. Persamaannya sebagai berikut :
...............................................................................................(1.9)
Keterangan :
σ : Ketelitian titik yang dihasilkan
DOP : Nilai Dilution of Precision
σ0 : Ketelitian pengamatan
Berdasarkan pada parameter yang diestimasi, dikenal beberapa jenis DOP
(Dilution of Precision) yaitu :
1. GDOP = Geometrical DOP (posisi 3D dan waktu)
2. PDOP = Positional DOP (posisi 3D)
3. HDOP = Horizontal DOP (posisi horisontal)
4. VDOP = Vertical DOP (tinggi)
5. TDOP = Time DOP (waktu)
I.5.9. Kesalahan dan Bias
Setiap pengukuran dengan GPS pasti baik menggunakan pseudorange maupun
carrier phase mengandung kesalahan dan bias yang akan berpengaruh pada
ketelitian penentuan posisi (Wellenhof et al., 1992). Bias didefinisikan sebagai efek
dari pengukuran yang menyebabkan jarak ukuran yang sebenarnya (true range)
berbeda dengan jarak ukuran (measured range) sebagai akibat dari kesalahan
sistematik, dan ini bisa/perlu dimodelkan saat dilakukan pengolahan data. Sedangkan
kesalahan didefinisikan sebagai bias yang tidak dapat dimodelkan.

19
Terdapat beberapa kesalahan dan bias GPS, untuk lebih lengkapnya dijelaskan
dalam tabel sebagai berikut.
Tabel I.2. Efek dari pengurangan data (Abidin, 2000)
Kesalahan dan Bias Dampak dari Pengurangan Data
Dieliminasi Direduksi
Jam satelit Dapat Tidak Dapat
Jam receiver Dapat Tidak Dapat
Orbit (ephemeris) Tidak Dapat Dapat
Ionosfer Tidak Dapat Dapat
Troposfer Tidak Dapat Dapat
Multipath Tidak Dapat Tidak Dapat
Noise (derau) Tidak Dapat Tidak Dapat
Selective Availability Dapat Dapat
Efek dari kesalahan dan bias harus diperhitungkan secara baik dan benar,
karena akan mempengaruhi ketelitian informasi (posisi, kecepatan, percepatan,
waktu) yang diperoleh dan proses penentuan ambiguitas fase dari sinyal GPS. Secara
umum ada beberapa cara dan strategi yang dapat digunakan untuk menangani
kesalahan dan bias GPS, antara lain sebagai berikut (Abidin, 2000):
1. Terapkan mekanisme differencing antar data.
2. Estimasi parameter dari kesalahan dan bias dalam proses hitung perataan.
3. Hitung besarnya kesalahan/bias berdasarkan data ukuran langsung.
4. Hitung besarnya kesalahan/bias berdasarkan model.
5. Gunakan strategi pengamatan yang tepat.
6. Gunakan strategi pengolahan data yang tepat.
7. Abaikan

20
I.5.10. Sistem Koordinat UTM
Koordinat tiga dimensi yang ditentukan oleh GPS dalam sistem WGS 84
biasanya harus ditransformasikan lebih dahulu ke sistem datum lokal dan kemudian
ke sistem proyeksi peta yang digunakan. Penyajian hasil hitungan dalam bidang datar
(proyeksi) yang dilakukan menggunakan sistem koordinat proyeksi Universal
Transvere Mercator (UTM). Proyeksi UTM merupakan proyeksi silinder transversal
konform yang memotong bola bumi pada dua meridian standar. Seluruh permukaan
bumi dibagi dalam 60 wilayah yang disebut zone UTM. Masing-masing zone
dibatasi oleh dua meridian dengan lebar 60. Tiap zone mempunyai meridian tengah
sendiri-sendiri, dengan faktor perbesaran di meridian tengah 0,996.
Zone proyeksi UTM diberi nomor yaitu mulai dari zone satu antara 1800 BB
sampai dengan 1740 terus ke timur sampai zone 60 antara 174
0 BT sampai 180
0 BT.
Batas lintang proyeksi UTM adalah 800 LS dan 84
0 LU dengan lebar jalur 8
0 dan
pembagiannya dimulai dari 800 LS terus ke utara. Jalur-jalur dengan lebar 8
0 ini
diberi tanda dengan huruf C untuk jalur 800 LS dan 72
0 LS berurutan kearah utara
sampai huruf X untuk jalur 720 LU sampai dengan 84
0 LU, dengan catatan huruf I
dan O tidak digunakan. Tiap zone jalur merupakan satuan daerah dengan cara
penomorannya dengan menyebutkan nama zone dan hurufnya. Masing-masing zone
mempunyai sistem koordinat sendiri-sendiri, yaitu dengan titik nol sejati pada
perpotongan antarameridian tengah dengan ekuator.
Untuk menghindari koordinat negatif di dalam proyeksi UTM setiap meridian
tengah di dalam setiap zone diberi harga 500.000 m Timur. Untuk harga-harga ke
arah utara ekuator dipakai sebagai garis datum dan diberi harga 0 m Utara. Untuk
perhitungan kearah selatan ekuator diberi harga 10.000.000 m Utara (Prihandito,
1998).

21
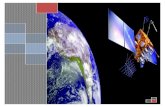
Gambar I.6. Pembagian zone UTM wilayah Indonesia
Untuk wilayah Indonesia terbagi dalam 9 zone, mulai dari meridian 900 BT
sampai 1440 BT dengan garis batas pararel 10
0 LU sampai 15
0 LS, serta tercakup
dalam zone nomor 46 sampai dengan 54.
1.5.11. Uji Peta
Uji peta dilakukan untuk mengetahui tingkat ketelitian hasil penggambaran
dibandingkan dengan kondisi sesungguhnya dilapangan. Uji peta dilakukan dengan
maksud untuk mengecek kelengkapan detil, skala/planimetris, dan elevasi. Pengujian
kelengkapan detil dilakukan dengan pengecekan lapangan langsung yaitu dengan
cara membandingkan kesesuaian hasil gambar peta dengan kondisi di lapangan.
Berdasarkan dalam panduan Kemah Kerja Teknik Geodesi Tahun 2013 pengujian
skala dan elevasi dilakukan dengan pengecekan langsung di lapangan yaitu dengan
cara :
1. Pengecekan skala/planimetris dilakukan dengan cara pengukuran jarak dari
obyek/detil yang satu terhadap detil yang lain.
2. Pengecekan elevasi/kontur dilakukan dengan cara pengukuran beda tinggi
antara obyek/detil yang satu dengan detil yang lain.
Pengujian skala dan elevasi dapat juga dilakukan dengan pengecekan langsung
dilapangan dari angka koordinat Easting, Northing dan tinggi (E,N,H) titik-titik

22
sampel yang telah ditentukan dengan cara melakukan pengukuran koordinat titik-titik
sampel. Jumlah detil titik-titik sampel minimal 20 buah untuk masing-masing jarak
dan elevasi.
Toleransi untuk pengujian peta adalah sebagai berikut :
1. Untuk ketelitian peta dinyatakan bahwa spesifikasi ketelitian horizontal jika
dilakukan uji ketelitian adalah 0,3 mm dikali skala peta dan dibandingkan
dengan hasil hitungan koordinat pengukuran yang diuji di lapangan.
2. Untuk spesifikasi ketelitian vertikal/kontur ketelitian adalah 0,5 dikali skala
peta, dan jika dilakukan uji ketelitian tinggi tidak boleh lebih dari 10% titik-
titik yang diuji memiliki kesalahan lebih dari 0,5 mm dikali skala peta.
I.5.12. AutoCAD Land Desktop
AutoCAD Land Deskop adalah suatu program grafis yang handal dalam
menangani gambar yang berbasis vektor. Kemampuan-kemampuan sistem CAD
(Computer Aided Design) membantu dalam mengolah dan menyajikan data hasil
pekerjaan pemetaan. Analisa spasial yang dimiliki oleh setiap sistem CAD ini sangat
bervariasi, diantaranya berupa hitung-hitungan jarak (Distance), keliling, luas,
volume, pembuatan garis kontur dan lain sebagainya. Fungsi-fungsi pada AutoCAD
menyediakan berbagai fasilitas untuk memodifikasi gambar pada peta. Gambar dapat
dihapus, dipindahkan, atau digandakan. Menu utama AutoCAD Land Desktop yang
berkaitan dengan pekerjaan pembuatan peta diantaranya adalah :
a. Project digunakan untuk mengatur database pekerjaan yang telah dibuat,
submenu yang sering digunakan adalah Drawing setup untuk mengatur
parameter gambar.
b. Point digunakan untuk membuat titik data yang akan dimasukkan ke dalam
lembar kerja, didalamnya terdapat submenu antara lain : Point setting,
Create Points, Import/Export Points, Edit Point, dan lain-lain.
c. Terrain digunakan untuk membuat terrain dengan menggunakan data point
yang telah dibuat sebelumnya termasuk dalam pembuatan garis kontur.
Submenu dari Terrain antara lain : Terrain Model Explorer, Edit Surface,
Create Contour, Section, Grid Volume.

23
d. Plot digunakan untuk mencetak peta yang telah dibuat. Pada proses ini akan
ada menu pilihan dan parameter yang harus dimasukkan agar software dapat
melakukan proses pencetakan peta seperti yang kita inginkan. Parameter
tersebut antara lain ukuran kertas yang digunakan, skala pencetakan, unit
ukuran, dan lain sebagainya.