BAB 6. Controller dalam Analog dan...
7
DIKTAT KULIAH Elektronika Industri & Otomasi (IE-204) BAB 6. Controller dalam Analog dan Digital Diktat ini digunakan bagi mahasiswa Jurusan Teknik Industri Fakultas Teknik Universitas Kristen Maranatha Ir. Rudy Wawolumaja M.Sc JURUSAN TEKNIK INDUSTRI - FAKULTAS TEKNIK UNIVERSITAS KRISTEN MARANATHA BANDUNG 2013
Transcript of BAB 6. Controller dalam Analog dan...

DIKTAT KULIAH
Elektronika Industri & Otomasi
(IE-204)
BAB 6.
Controller dalam Analog dan Digital
Diktat ini digunakan bagi mahasiswa
Jurusan Teknik Industri Fakultas Teknik
Universitas Kristen Maranatha
Ir. Rudy Wawolumaja M.Sc
JURUSAN TEKNIK INDUSTRI - FAKULTAS TEKNIK
UNIVERSITAS KRISTEN MARANATHA
BANDUNG
2013

TI 2013 IE-204 Elektronika Industri & Otomasi UKM
Rudy Wawolumaja Halaman 63
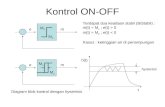
Bab 6. Controller PID untuk robust sistem dalam analog dan digital (gambaran sekilas)
PID Controllers pada sinyal analog.
PID adalah singkatan dari Proportional, Integral, Derivative. Salah satu bentuk controller yang
digunakan secara luas dalam proses industry biasanya dalam tiga istilah atau disebut PID
controller. Controller ini mempunyai transfer function yang mempunyai sifat :
Proportional controller (Kp) memberi dampak mengurangi rise time dan mengurangi walaupun
tidak menghilangkan steady state error. Integral control (KI) memberi dampak menghilangkan
steady-state error, namun dipihak lain memberi dampak negative, yaitu memperburuk transient
response . Derivative control (KD) mempunyai efek meningkatkan kestabilan system,
mengurangi overshoot, dan meningkatkan kinerja transient response.
Proportional-Integral-Derivative (PID) Controller
dt
tdeKdtteKteKtu
sKs
KKtG
DIp
DI
pC
)()()()(
derivativedan n integratio , alproportion :bentuk 3 memiliki diatas Controller
)(
s
KsKsK
sE
sUsG
sEsKs
KKsU
KKK
tytrte
tseKs
teKteKtu
IPDPID
DI
p
DIP
DIp
2
)(
)()(
)()()(
gains.feedback derivativedan integral,al,proportionadalah dan ,,
sistem;output sinyaldan reference sinyal antaraselisih error adalah )()()(
)()(
)()(

TI 2013 IE-204 Elektronika Industri & Otomasi UKM
Rudy Wawolumaja Halaman 64
PID dan Operational Amplifiers
Sebagian besar transfer functions dapat diimplementasikan menggunakan operational
amplifiers dan komponen passive (R, L, C) pada jalur input dan feedback . Operational
amplifiers digunakan dalam system pengaturan ( control systems) untuk implementasi
PID- control algorithms yang dibutuhkan
Inverting amplifier
1
2
)(
)(
R
R
tV
tV
S
o

TI 2013 IE-204 Elektronika Industri & Otomasi UKM
Rudy Wawolumaja Halaman 65
Op-amp Integrator
Op-amp Differentiator
The operational differentiator melaksanakan fungsi differentiasi sinyal input . Arus (I) yang
melewati input capacitor adalah CS dvs(t)/dt. Tegangan output adalah proportional dengan
derivative dari tegangan input terhadap waktu,
Vo(t) = _RFCS dvs(t)/dt
sCRsZ
sZ
sV
sVsG
FSs
out 1
)(
)(
)(
)()(
1
2
sCRsZ
sZ
sV
sVsG SF
S
o _)(
)(
)(
)()(
1
2

TI 2013 IE-204 Elektronika Industri & Otomasi UKM
Rudy Wawolumaja Halaman 66
Linear PID Controller
12
2121
2211
2
2121
22112
12
21
2211
;1
;;)(
1
11
)(
)()(
CRKCR
KCR
CRCRKP
s
KsKsKsG
s
CRs
CR
CRCRsCR
sCR
sCRsCR
sV
sVsG
DIIPD
PID
S
o

TI 2013 IE-204 Elektronika Industri & Otomasi UKM
Rudy Wawolumaja Halaman 67
Sistem Pengolahan Sinyal Digital – PID controller pada sinyal digital.
Proses pengolahan sinyal digital, diawali dengan proses pencuplikan sinyal masukan yang
berupa sinyal kontinyu. Proses ini mengubah representasi sinyal yang tadinya berupa sinyal
kontinyu menjadi sinyal diskrete. Proses ini dilakukan oleh suatu unit ADC (Analog to Digital
Converter). Unit ADC ini terdiri dari sebuah bagian Sample/Hold dan sebuah bagian quantiser.
Unit sample/hold merupakan bagian yang melakukan pencuplikan orde ke-0, yang berarti nilai
masukan selama kurun waktu T dianggap memiliki nilai yang sama. Pencuplikan dilakukan
setiap satu satuan waktu yang lazim disebut sebagai waktu cuplik (sampling time). Bagian
quantiser akan merubah menjadi beberapa level nilai, pembagian level nilai ini bisa secara
uniform ataupun secara non-uniform misal pada Gaussian quantiser.
Unjuk kerja dari suatu ADC bergantung pada beberapa parameter, parameter utama yang
menjadi pertimbangan adalah sebagai berikut :
Kecepatan maksimum dari waktu cuplik.
Kecepatan ADC melakukan konversi.
Resolusi dari quantiser, misal 8 bit akan mengubah menjadi 256 tingkatan nilai.
Metoda kuantisasi akan mempengaruhi terhadap kekebalan noise.
Gambar 1. Proses sampling
Sinyal input asli yang tadinya berupa sinyal kontinyu, x(T) akan dicuplik dan diquantise
sehingga berubah menjadi sinyal diskrete x(kT). Dalam representasi yang baru inilah sinyal
diolah. Keuntungan dari metoda ini adalah pengolahan menjadi mudah dan dapat memanfaatkan
program sebagai pengolahnya. Dalam proses sampling ini diasumsikan kita menggunakan waktu
cuplik yang sama dan konstan, yaitu Ts. Parameter cuplik ini menentukan dari frekuensi
harmonis tertinggi dari sinyal yang masih dapat ditangkap oleh proses cuplik ini. Frekuensi
sampling minimal adalah 2 kali dari frekuensi harmonis dari sinyal.
Untuk mengurangi kesalahan cuplik maka lazimnya digunakan filter anti-aliasing sebelum
dilakukan proses pencuplikan. Filter ini digunakan untuk meyakinkan bahwa komponen sinyal
yang dicuplik adalah benar-benar yang kurang dari batas tersebut. Sebagai ilustrasi, proses
pencuplikan suatu sinyal digambarkan pada gambar berikut ini.

TI 2013 IE-204 Elektronika Industri & Otomasi UKM
Rudy Wawolumaja Halaman 68
Gambar 2. Pengubahan dari sinyal kontinyu ke sinyal diskret
Setelah sinyal diubah representasinya menjadi deretan data diskrete, selanjutnya data ini dapat
diolah oleh prosesor menggunakan suatu algoritma pemrosesan yang diimplementasikan dalam
program. Hasil dari pemrosesan akan dilewatkan ke suatu DAC (Digital to Analog Converter)
dan LPF (Low Pass Filter) untuk dapat diubah menjadi sinyal kontinyu kembali. Secara garis
besar, blok diagram dari suatu pengolahan sinyal digital adalah sebagai berikut :
Gambar 3. Blok Diagram Sistem Pengolahan Sinyal Digital
Proses pengolahan sinyal digital dapat dilakukan oleh prosesor general seperti halnya yang lazim
digunakan di personal komputer, misal processor 80386, 68030, ataupun oleh prosesor RISC
seperti 80860. Pada prinsipnya processor dapat diprogram sehingga berfungsi sebagai comtroller
baik P (Proportional), I (Integrator), D (Differentiator), atau PI, PD, PID.
Matematik yang dipakai untuk sistem linear adalah transformasi z. (ini area disiplin ilmu
tersendiri, yaitu sistem kendali diskrit/discrete control system.