BAB 2 LANDASAN TEORI -...
22
BAB 2 LANDASAN TEORI 2.1. Computer Vision Computer Vision adalah suatu bidang ilmu yang bertujuan untuk mendeskripsikan dunia yang dilihat dalam satu atau lebih citra dan merekonstruksikan properti-properti yang ada seperti bentuk, iluminasi dan distribusi warna (Szeliski, 2011, p. 3). Baik manusia maupun hewan dapat dengan sangat mudah mendeskripsikan citra, seperti mendeskripsikan objek, cahaya, bayangan, nama orang, ekspresi wajah, dan sebagainya, sedangkan algoritma Computer Vision sangat rentan terhadap kesalahan. Secara umum, kesulitan untuk menangkap perseptual suatu citra dapat dianggap sama dengan kesulitan pada algoritma kognitif seperti pembuktian logika dan perencanaan pada bidang Artificial Intelligence (Szeliski, 2011, p. 3). 2.2. Citra Digital Citra dapat dinyatakan sebagai suatu fungsi dua dimensi ሺݕ ,ݔሻ dengan ݔmaupun ݕadalah posisi koordinat sedangkan merupakan amplitudo pada posisi ሺݕ,ݔሻ yang sering dikenal sebagai intensitas atau grayscale (Gonzalez & Woods, 2002, p. 1). Ketika nilai ݔ, ݕ, dan amplitudo terbatas dan bernilai diskrit, citra tersebut dikatakan sebagai citra digital. Pemrosesan citra digital menunjuk ke suatu proses pengolahan suatu citra sebagai input dan output dengan tujuan untuk melakukan ekstraksi atribut dari citra tersebut (Gonzalez & Woods, 2002, p. 3).
Transcript of BAB 2 LANDASAN TEORI -...

BAB 2
LANDASAN TEORI
2.1. Computer Vision
Computer Vision adalah suatu bidang ilmu yang bertujuan untuk mendeskripsikan
dunia yang dilihat dalam satu atau lebih citra dan merekonstruksikan properti-properti
yang ada seperti bentuk, iluminasi dan distribusi warna (Szeliski, 2011, p. 3).
Baik manusia maupun hewan dapat dengan sangat mudah mendeskripsikan citra,
seperti mendeskripsikan objek, cahaya, bayangan, nama orang, ekspresi wajah, dan
sebagainya, sedangkan algoritma Computer Vision sangat rentan terhadap kesalahan.
Secara umum, kesulitan untuk menangkap perseptual suatu citra dapat dianggap sama
dengan kesulitan pada algoritma kognitif seperti pembuktian logika dan perencanaan
pada bidang Artificial Intelligence (Szeliski, 2011, p. 3).
2.2. Citra Digital
Citra dapat dinyatakan sebagai suatu fungsi dua dimensi , dengan maupun
adalah posisi koordinat sedangkan merupakan amplitudo pada posisi , yang
sering dikenal sebagai intensitas atau grayscale (Gonzalez & Woods, 2002, p. 1). Ketika
nilai , , dan amplitudo terbatas dan bernilai diskrit, citra tersebut dikatakan sebagai
citra digital.
Pemrosesan citra digital menunjuk ke suatu proses pengolahan suatu citra sebagai
input dan output dengan tujuan untuk melakukan ekstraksi atribut dari citra tersebut
(Gonzalez & Woods, 2002, p. 3).

10
2.3. Properti Cahaya pada Citra Digital
Suatu citra digital merupakan komposisi dari sampel titik-titik (pixel) yang
merepresentasikan nilai intensitas atau warna. Nilai-nilai ini berasal dari pencahayaan,
refleksi, dan bayangan. Fenomena yang berhubungan dengan persepsi citra yang
ditangkap pada mata manusia meliputi kecerahan (brightness) dan kontras.
2.3.1 Illumination/Lighting
Iluminasi atau pencahayaan merupakan properti cahaya yang ada pada scene yang
disebabkan oleh adanya sumber cahaya. Sumber cahaya secara umum dapat dibedakan
menjadi sumber titik dan sumber cahaya area (Szeliski, 2011, p. 54).
Sumber cahaya titik berasal dari satu lokasi tertentu pada space, misalnya cahaya
lampu ataupun titik yang berasal dari jarak tak hingga seperti cahaya matahari. Sumber
cahaya memiliki intensitas dan spektrum warna. Sumber cahaya area merupakan
kumpulan dari sumber cahaya titik pada suatu area, misalnya lampu fluorescent. Sumber
cahaya area cenderung untuk menyebarkan intensitas cahaya yang sama ke semua objek
pada scene.
Iluminasi diukur sebagai jumlah cahaya (photon) yang mencapai permukaan
objek. Satuan iluminasi adalah lux/m2 atau lumens/m2. Iluminasi dapat diukur
menggunakan lux meter. Semakin dekat sumber cahaya terhadap area yang disinari,
semakin tinggi pula nilai iluminasinya.
Iluminasi yang jatuh pada suatu permukaan dapat disimbolkan dengan . Pada
suatu citra digital, distribusi iluminasi untuk setiap pixel dapat disimbolkan dengan
, (Rahman, 1995).

11
2.3.2 Reflectance
Reflektansi adalah properti pada cahaya yang menyebar/dipantulkan jika cahaya
tersebut jatuh pada permukaan objek. Nilai reflektansi dapat diukur dengan menghitung
rasio cahaya yang dipantulkan terhadap jumlah cahaya yang datang. Reflektansi dapat
disimbolkan dengan , sedangkan distribusi reflektansi pada suatu citra dapat
disimbolkan dengan , (Rahman, 1995).
Berikut adalah model reflektansi menurut Szeliski (2011, p. 55).
1. Bidirectional Reflectance Distribution Function (BRDF)
BRDF merupakan fungsi empat dimensi yang mendeskripsikan seberapa banyak
gelombang yang datang pada arah insiden yang dipantulkan pada arah .
Fungsi BRDF dapat ditulis sebagai , , , ; .
Gambar 2.1 Model Bidirectional Reflectance Distribution Function
Fungsi BDRF bersifat resiprokal, karena peran dan dapat dipertukarkan
tanpa mengubah hasil. Kebanyakan permukaan bersifat isotropik, karena arah
cahaya yang pada permukaan tidak menentu. Untuk permukaan isotropik, BRDF
dapat disederhanakan menjadi , , | |; atau , , ; .
2. Diffuse Reflection
Komponen diffuse sering disebut sebagai refleksi matte/Lambertian. Komponen
ini akan menyebarkan cahaya pada jumlah yang sama ke segala arah. Dengan
demikian, nilai BDRF adalah konstan, yaitu , , ; .

12
3. Specular Reflection
Refleksi spekular merupakan pemantulan sempurna seperti cermin. Cahaya yang
datang dan menyentuh permukaan objek akan direfleksikan ke satu arah sesuai
dengan hukum pemantulan cahaya (law of reflection) yang menyatakan bahwa
sudut datang adalah sama dengan sudut pantul ( ).
4. Phong Reflection
Refleksi Phong adalah model empiris untuk iluminasi lokal. Phong
mendeskripsikan refleksi cahaya suatu permukaan sebagai kombinasi dari refleksi
diffuse pada permukaan kasar, refleksi spekular pada permukaan yang berkilau,
dan faktor dari ambient illumination yang merupakan cahaya yang berasal dari
hasil pemantulan sekitarnya (misalnya dinding, langit).
2.3.3 Luminance
Luminansi dideskripsikan sebagai banyaknya cahaya yang melewati atau dipancarkan
dari suatu area. Luminansi diukur pada suatu permukaan yang merefleksikan cahaya,
sehingga merupakan hasil perkalian antara iluminasi dan reflektansi. Luminansi seringkali
digunakan untuk mengukur refleksi dari suatu permukaan (Land & McCann, 1971).
Nilai luminansi mengindikasikan jumlah cahaya yang akan terdeteksi oleh
manusia yang melihat pada permukaan pada sudut tertentu. Oleh karenanya, luminansi
merupakan indikasi seberapa besar kecerahan (brightness) pada permukaan akan
dipersepsikan.
Pada citra digital, luminansi dapat disimbolkan dengan yaitu intensitas tiap pixel
pada citra. Nilai ini merupakan perkalian antara nilai iluminasi dan reflektansi pada
pixel tersebut dengan persamaannya adalah , , , (Rahman, 1995).

13
2.3.4 Brightness
Meskipun citra digital ditampilkan sebagai kumpulan elemen intensitas yang
diskrit, manusia mampu membedakan antara level intensitas yang berbeda. Brightness
(kecerahan) merupakan intensitas yang dipersepsikan oleh manusia, sehingga bersifat
subjektif. Penelitian menunjukkan bahwa kecerahan subjektif merupakan fungsi
logaritma dari intensitas cahaya (luminansi) yang masuk ke mata (Gonzalez & Woods,
2002, p. 38).
Gonzales dan Woods (2002, p. 40) menambahkan bahwa kecerahan yang
dipersepsikan tidak hanya terbatas pada fungsi intensitas karena dua fenomena, yaitu
fenomena Mach Bands dan kontras simultan. Fenomena Mach Bands merupakan
fenomena yang menunjukkan bahwa manusia cenderung menambahkan atau mengurangi
persepsi kecerahan pada batas antara area yang memiliki intensitas berbeda. Fenomena
kontras simultan menunjukkan bahwa intensitas suatu area dapat lebih terang dan lebih
gelap tergantung dari area di sekitarnya.
2.3.5 Contrast
Kontras adalah perbedaan pada properti visual yang membuat suatu objek pada
citra dapat dibedakan dengan objek yang lainnya. Pada persepsi visual, kontras
ditentukan dari perbedaan dalam warna dan kecerahan dari objek dan objek lainnya jika
dilihat dari tempat dan waktu yang sama. Karena sistem visual manusia lebih sensitif
terhadap kontras daripada daripada luminansi absolute pada citra, manusia dapat
mendeskripsikan citra meskipun terdapat perbedaan iluminasi yang besar (Peli, 1990).

14
2.4. Color Model
Color model (atau color space atau color system) adalah suatu model matematika
yang mendeskripsikan cara agar warna-warna dapat direpresentasikan sebagai tuplet
angka. Tujuan model warna ini adalah suatu standar untuk spesifikasi warna. Esensinya,
model warna digambarkan pada sistem koordinat. Setiap warna direpresentasikan sebagai
titik koordinat (Gonzalez & Woods, 2002, p. 289).
2.4.1 RGB
Pada model RGB, setiap warna merupakan komponen spektral utama, yaitu
merah, hijau, dan biru. Model RGB ini berbasis sistem koordinat. Komponen merah,
hijau, dan biru merupakan komponen utama. Warna hitam merupakan origin, sedangkan
putih merupakan warna pada titik terjauh dari origin. Pada model ini, warna abu-abu (titik
yang memiliki nilai RGB sama) berada pada garis dari titik hitam hingga putih (Gonzalez
& Woods, 2002, p. 290).
Citra RGB direpresentasikan dalam tiga komponen citra R, G, dan B. Ketika citra
tersebut ditampilkan pada monitor, ketiga citra akan digabungkan pada layar untuk
menghasilkan citra komposit.
2.4.2 CMYK
Cyan, magenta, dan yellow (CMY) merupakan warna sekunder dari cahaya, atau
warna primer dari pigmen. Jika suatu permukaan dengan pigmen cyan disinari dengan
putih, maka tidak ada warna merah yang dipantulkan. Hal ini dikarenakan cyan
mengurangi warna merah dari cahaya putih (Gonzalez & Woods, 2002, p. 294).
Alat-alat yang digunakan untuk mencetak citra membutuhkan input data CMY
atau memerlukan konversi RGB ke CMY secara internal. Konversi ini dilakukan dengan

15
operasi sederhana: , , 1,1,1 , , dengan asumsi nilai RGB sudah
dinormalisasi.
Dalam prakteknya, warna hitam sulit diproduksi dengan mengkombinasikan
warna C, M, dan Y. Oleh karenanya, untuk memproduksi warna hitam, digunakan warna
keempat, yaitu hitam sehingga model CMYK dikenal dengan K sebagai black (hitam).
2.4.3 HSV
HSV (Hue, Saturation, Value) merupakan projeksi dari model RGB ke sudut
chroma non-linear, persentase saturasi radial, dan nilai luminansi. Secara lebih detail,
value didefinisikan sebagai nilai rata-rata atau maksimum dari nilai warna, saturation
didefinisikan sebagai jarak dari diagonal, dan hue didefinisikan sebagai arah dari warna
(Szeliski, 2011, p. 79).
Model HSV memisahkan komponen intensitas dari citra warna, sehingga model
ini merupakan model yang ideal untuk mengembangkan algoritma pemrosesan citra yang
intuitif dan natural (Gonzalez & Woods, 2002, p. 295).
2.5. Retinex
2.5.1 Konsep Retinex
Konsep Retinex berawal dari pemikiran Edwin H. Land dan John J. McCann
(1971, p. 1) mengenai cara manusia mempersepsikan warna suatu objek. Hipotesis awal
dari Land adalah warna dari suatu objek bergantung dari jumlah cahaya yang masuk ke
mata, namun hal tersebut tidak sepenuhnya benar. Penelitian Land menunjukkan bahwa
jumlah cahaya yang masuk ke mata tidak menentukan warna objek.

16
Cahaya yang masuk ke mata didefinisikan sebagai luminansi yang merupakan
perkalian antara iluminasi dan reflektansi. Land melakukan percobaan dengan
menggunakan variabel iluminasi sebagai variabel kontrol dan menunjukkan bahwa
persepsi warna suatu objek tidak bergantung pada iluminasi, tetapi bergantung pada
reflektansi absolut dari objek tersebut (Land & McCann, 1971).
Skema yang mendeskripsikan persepsi warna ini disebut sebagai Retinex karena
melibatkan bagian retina dan korteks. Sistem retina merupakan sistem yang memiliki
sedikitnya tiga reseptor yang mampu menerima cahaya gelombang pendek (biru), sedang
(hijau), dan panjang (merah). Berbeda dengan sistem pengambilan citra pada kamera,
citra yang dibentuk oleh masing-masing reseptor tidak langsung digabungkan, tetapi
dibandingkan oleh korteks yang digunakan untuk merespon luminansi. Persepsi
luminansi ini disebut sebagai kecerahan (lightness/brightness). Pemrosesan pada korteks
cenderung mengkorelasikan reflektansi pada objek dengan baik, sehingga manusia dapat
dengan baik mendeskripsikan warna suatu objek di bawah kondisi iluminasi bervariasi.
Untuk memformulasikan Retinex, terdapat dua gagasan yang dikemukakan.
1. Penelitian tentang dua persegi (gambar 2.2) menunjukkan bahwa garis tepi antara
dua area mempengaruhi kecerahan. Ketika garis tepi dihilangkan atau ditutup
dengan suatu benda, maka kedua area persegi akan memiliki kecerahan yang
sama. Berdasarkan pengamatan, atribut tepi dalam hal ini tidak harus bersifat
tajam, namun juga bisa bersifat kabur.

17
Gambar 2.2 Dua persegi dengan kecerahan berbeda
Dengan mengasumsikan bahwa dua titik yang berdekatan memiliki iluminasi
yang sama, maka rasio luminansi dari dua titik tersebut akan mendekati rasio
reflektansinya. Oleh karenanya, dengan suatu prosedur mengambil rasio dari dua
titik berdekatan dapat mendeteksi tepi sekaligus mengeliminasi efek dari
iluminasi yang bervariasi.
2. Jika diberikan prosedur untuk mendapatkan rasio reflektansi dari dua area yang
berdekatan (dijelaskan pada nomor 1), maka rasio reflektansi dari dua area yang
berjauhan dapat dihitung dengan cara mengalikan semua rasio dari area-area yang
membentuk jalur dari area yang satu ke area yang lain.
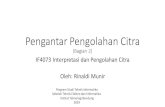
Gambar 2.3 Mondrian diberikan persentase luminansi

18
Sebagai contoh, pada gambar 2.3 diberikan figur Mondrian (lukisan dengan
bentuk kotak-kotak). Area paling atas memiliki luminansi sebesar 0,75. Area
terbawah memiliki luminansi 0,12. Rasio reflektansi didapat dengan mengalikan
semua rasio pada jalur yang ditemui. Diasumsikan bahwa luminansi tepi adalah
sama dengan luminansi daerah pusat, maka rasio reflektansi area paling atas
dengan area paling bawah adalah = 6,25. Selain
dapat menentukan rasio area paling atas dengan paling bawah, prosedur ini
menghasilkan nilai rasio reflektansi semua area yang ada pada jalur.
Melalui gagasan di atas, maka Retinex bekerja pada jalur dengan mengalikan rasio
luminansi untuk mendapatkan rasio reflektansi. Rasio luminansi pada gambar 2.3
merupakan luminansi area, sedangkan citra digital menggunakan elemen pixel. Land
mengemukakan asumsi: “jika elemen pixel yang digunakan, rasio yang mendekati 1
dianggap memiliki nilai 1 untuk melakukan toleransi variasi iluminasi”. Konsep ini
disebut juga dengan thresholding (Land & McCann, 1971, p. 6).
Setiap jalur yang dipilih dan dilalui membuat semua area memiliki nilai
reflektansi relatifnya dengan area lain. Nilai reflektansi pada area pertama pada jalur
dianggap memiliki reflektansi absolut terbesar, misalnya 100. Jalur-jalur yang berbeda
dapat memberikan hasil yang berbeda terhadap reflektansi absolut. Dengan merata-
ratakannya, maka akan diketahui reflektansi absolut yang nilainya mendekati nilai
sesungguhnya. Sebagai contoh, area A, B, C, D, E, F, G masing-masing memiliki nilai
luminansi {60, 20, 40, 100, 60, 80, 30}. Jika jalur bergerak dari A ke G, maka diperoleh
reflektansi absolut {100, 33, 67, 100, 60, 80, 30}. Jika jalur bergerak dari G ke A, maka

19
akan diperoleh reflektansi absolut {60, 20, 40, 100, 75, 100, 100}. Dengan merata-
ratakan kedua hasil reflektansi absolut dari kedua jalur, diperoleh reflektansi absolut rata-
rata sebesar {80, 27, 53, 100, 68, 90, 65} yang mendekati nilai reflektansi sesungguhnya.
Konsep Retinex dengan menggunakan jalur merupakan Retinex versi statis yang
kemudian direvisi oleh Land (1983, p. 1) dan Provenzi (Provenzi, Carli, & Rizzi, 2005).
Retinex versi dinamis dikembangkan oleh Land (1983, p. 1), Rahman (Rahman, 1995),
Jobson, Woodell (Jobson & Woodell, 1995), dan Provenzi (Provenzi, Carli, & Rizzi,
2005) untuk komputasi yang lebih sederhana.
2.5.2 Formulasi Retinex
Berikut adalah formulasi Retinex menurut Provenzi (Provenzi, Carli, & Rizzi,
2005, p. 2614).
Diberikan citra digital, asumsikan terdapat koleksi jalur dengan merupakan
nilai channel R, G, dan B. Jalur dikomposisikan sebagai rangkaian pixel dimulai dari
dan berakhir di . Didefinisikan merupakan jumlah pixel yang dilalui pada jalur
dan 1, … , . Untuk semua jalur , :{1, ..., }, 1 dan .
Untuk kesederhanaan, digunakan simbol untuk pixel ke pada jalur ,
misalnya dan 1 , untuk 1, … , 1. Jika setiap
pixel memiliki intensitas (nilai R, G, B) yaitu , maka rasio intensitas
/ .

20
Formula untuk menghitung nilai kecerahan (L) pada pixel generik ke- diberikan
sebagai berikut.
1
merupakan fungsi. : , 1, … , . 1 dan untuk setiap
1, … , 1,
jika 0 11 jika 1 1
jika 1 1
∏1
∏jika
1∏
Simbol menyatakan threshold yang digunakan agar algoritma dapat melakukan
toleransi terhadap perubahan intensitas, misalnya gradien sebagai reaksi iluminasi.
Pilihan pertama pada fungsi berlaku jika intensitas pixel lebih kecil
daripada intensitas pixel sebelumnya, , maka akan mengembalikan nilai .
Pilihan kedua berlaku jika terdapat perubahan kecil pada intensitas kedua pixel.
Pada kasus ini, didefinisikan menjadi 1, sehingga perkalian rasio sebelumnya tidak
mengalami perubahan.
Pilihan ketiga berlaku jika rasio lebih besar dari 1 , namun hasil perkalian
… belum mencapai nilai intensitas maksimum (1 ),
sehingga menghasilkan seperti pada piihan pertama.

21
Jika hasil perkalian … lebih besar dari intensitas
maksimum (1 , maka rangkaian nilai perkalian tersebut akan diset menjadi 1, yang
berarti nilai lokal maksimum sudah dicapai. Pilihan ini mengimplementasikan
mekanisme reset.
Formula Retinex di atas dapat dirumuskan ulang dalam bentuk fungsi logaritma.
Menurut Provenzi (2005, p. 2615), hal ini lebih diimplementasikan karena transformasi
logaritma mengubah perkalian menjadi penjumlahan dan perkalian menjadi pengurangan,
sehingga mengurangi biaya komputasi algoritma. Untuk konstruksi logaritma tersebut,
fungsi identitas dilakukan pada hasil perkalian yang selalu bernilai positif.
1exp log
1exp log
Jika log , log , 0, maka
fungsi menjadi 0, dan untuk setiap 1, … , 1,
jika ∞ ̃0 jika ̃ ̃
jika ̃ ̃
jika ̃

22
Simbol ̃ disederhakan menjadi log 1 . Dengan demikian, formula logaritma
untuk Retinex statis dapat dirumuskan ulang menjadi sebagai berikut.
1exp
2.5.3 Single-Scale Retinex
Single-Scale Retinex (SSR) atau Surround Retinex merupakan Retinex versi
dinamis yang dikemukakan oleh Land (1983, p. 5165) untuk meniru sistem kerja neuron
pada sistem persepsi warna manusia. Berbeda dengan Retinex statis, Retinex versi
dinamis tidak menggunakan jalur, tetapi menggunakan fungsi sekitar (surround function)
untuk meradiasikan intensitas ke pixel sekitarnya.
Berikut formulasi Single-Scale Retinex menurut Rahman (1995), Jobson, dan
Woodell (1995).
, log , log , ,
, merupakan output Retinex. , adalah distribusi citra pada pixel ke
, . Simbol “*” menyatakan operator konvolusi. , merupakan fungsi Gaussian yang
didefinisikan sebagai berikut. Simbol menyatakan channel warna, misalnya R, G, dan B.
, , /
Nilai adalah konstanta Gaussian yang mengatur seberapa jauh kurva Gaussian
menyebar. Nilai dapat memiliki hubungan dengan nilai standar deviasi , yaitu
2 . Nilai merupakan jarak/jari-jari titik lain dengan titik , . Nilai

23
ditentukan sedemikian rupa , 1. Hubungan nilai dengan standar
deviasi yaitu √
. Fungsi Gaussian dapat ditulis kembali sebagai berikut.
, ,1
√2
Operasi Retinex di atas dilakukan untuk setiap channel R, G, B untuk
menghasilkan citra dengan warna konstan (independen terhadap iluminasi). Ide
komputasi ini berawal dari definisi luminansi sebagai perkalian antara iluminasi dan
reflektansi.
, , ,
, merupakan distribusi iluminasi sekitar , dan , merupakan
distribusi reflektansi sekitar, maka rasio luminansi titik , dengan titik sekitar dapat
dicari sebagai berikut.
,,,
, ,, ,
Dengan asumsi bahwa nilai iluminasi sekitar , memiliki nilai sama atau
mendekati dengan nilai iluminasi titik , , maka rasio luminansi akan mendekati
rasio reflektansinya. Kemudian, dengan melakukan operasi logaritma yang menurut
Rahman (1995) sangat tepat untuk memproduksi hasil yang terbaik pada fungsi sekitar,
maka Single-Scale Retinex diformulasikan menjadi , log ,, log ,
log , seperti yang sudah dirumuskan sebelumnya.

24
2.6. Multi-Scale Retinex
Multi-Scale Retinex (MSR) dikembangkan (Jobson, Rahman, & Woodell, 1997)
karena keterbatasan yang dimiliki oleh Single-Scale Retinex (SSR), yaitu sebagai berikut.
1. SSR mampu melakukan kompresi jarak dinamis (Dynamic Range
Compression/DRC) pada citra jika digunakan pada skala rendah, sehingga
memungkinkan citra dengan jarak dinamis sangat lebar dikompresi dengan
melakukan penguatan bagian gelap dan melemahkan bagian yang terang. Pada
skala besar, SSR mampu menghasilkan citra dengan lebih alami dengan impresi
kecerahan yang besar pada area. Masalah yang dihadapi SSR adalah SSR tidak
mampu melakukan kedua hal tersebut sekaligus.
2. SSR cenderung untuk membuat area berwarna sama menjadi berwarna abu-abu,
terutama jika digunakan skala rendah (Barnard & Funt, 1998).
3. Kasus yang jarang terjadi adalah citra output SSR dapat mengalami
distorsi/pergeseran warna (Barnard & Funt, 1998).
Untuk mengatasi masalah SSR, skala yang berbeda digunakan dan diberi bobot
yang berbeda untuk menggabungkan kelebihan dan menghilangkan kelemahan yang
dimiliki dari skala rendah dan skala besar. Ide ini merupakan dasar dari Multi-Scale
Retinex. Berikut adalah formulasi original dari Jobson, Rahman, dan Woodell (1997).
merupakan output dari Multi-Scale Retinex (MSR) yang merupakan jumlah
dari output SSR yang masing-masing diberi bobot. adalah jumlah skala yang

25
digunakan. adalah bobot yang diasosiasikan dengan skala ke- . merupakan
output dari SSR yang diasosiasikan dengan skala ke- . Simbol menyatakan channel
warna, misalnya R, G, dan B.
Fungsi Gaussian yang digunakan oleh ditulis kembali sebagai berikut.
, , / 1√2
Simbol menyatakan parameter yang diberikan untuk fungsi Gaussian yang
memiliki hubungan dengan standar deviasi , yaitu 2 . Berdasarkan formula
MSR tersebut, konstruksi MSR ditentukan oleh parameter-parameter berikut.
1. Jumlah skala ( )
Menurut Jobson (1997), jumlah skala yang digunakan adalah 3 sebagai jumlah
skala minimum yang menyediakan output yang baik berdasarkan persepsi visual
dan waktu komputasi yang cepat.
2. Skala yang digunakan (
Berdasarkan eksperimen oleh Jobson (1997), Skala yang digunakan harus terdiri
dari skala rendah ( 20 , sedang ( 80 , dan tinggi ( 200). Skala
rendah digunakan untuk mengkompresi jarak dinamis dan memberikan detil pada
citra yang gelap dan terang. Skala sedang digunakan untuk mengurangi efek “halo”
yang berada di sekeliling tepi, sekaligus untuk memberikan impresi natural. Skala
tinggi digunakan untuk memberikan kecerahan seperti citra natural.
3. Bobot untuk skala tiap output SSR
Berdasarkan eksperimen oleh Jobson (1997), bobot yang merata sudah cukup
untuk aplikasi. Jika 3, maka 1 3⁄ , 1, 2, 3.

26
2.7. Ekualisasi Histogram
Subbab ini akan membahas teori mengenai ekualisasi histogram yang diperlukan
agar dapat digunakan sebagai perbandingan dengan metode Multi-Scale Retinex.
Histogram dari suatu citra digital dengan level intensitas 0, 1 adalah fungsi
distribusi disktret dengan adalah level intensitas ke- dan adalah jumlah
pixel pada citra yang memiliki nilai intensitas (Gonzalez & Woods, 2002, p. 88).
Histogram merupakan basis dari teknik pemrosesan citra berbasis spasial
(manipulasi langsung pixel suatu citra). Manipulasi histogram dapat digunakan untuk
memperbaiki kualitas citra. Selain itu, histogram berperan dalam menyediakan statistik
citra yang berguna, serta mudah dan cepat dikalkulasikan, sehingga sering digunakan
dalam pemrosesan citra secara real-time (Gonzalez & Woods, 2002, p. 88).
Ekualisasi Histogram (atau linearisasi histogram) adalah suatu teknik pemrosesan
citra yang memetakan input pixel dengan intensitas ke nilai output pixel dengan
intensitas berdasarkan distribusi kumulatif histogram (Gonzalez & Woods, 2002).
Jika distribusi peluang histogram dinyatakan sebagai ,
0, 1, 2, … , 1 dengan adalah jumlah pixel yang memiliki intensitas dan adalah
jumlah pixel pada citra, maka distribusi kumulatif peluang histogram dapat dinyatakan
sebagai ∑ . Fungsi ekualisasi histogram, , dapat ditulis sebagai berikut.
0, 1, 2, … , 1

27
2.8. Koreksi Gamma
Subbab ini akan membahas teori mengenai koreksi gamma yang diperlukan agar
dapat digunakan sebagai perbandingan dengan metode Multi-Scale Retinex.
Koreksi gamma memetakan input pixel dengan intensitas ke output pixel dengan
intensitas secara non-linear dengan menggunakan fungsi pangkat (Gonzalez & Woods,
2002, p. 80).
Nilai gamma, , adalah nilai konstan. Nilai input pixel dan merupakan nilai
intensitas yang sudah dinormalisasi, sehingga memiliki nilai di antara 0 dan 1.
Nilai , jika diberi nilai 1, maka akan menjadikan fungsi tersebut menjadi fungsi
identitas. Jika 1, maka citra output akan cenderung lebih terang, sedangkan jika
1, output citra akan cenderung lebih gelap dari citra awal.
Suatu konsep yang salah menyatakan bahwa koreksi gamma digunakan untuk
mengompensasikan hasil output yang merupakan fungsi pangkat dari CRT/cathode ray
tube. Koreksi gamma suatu citra digunakan untuk mendekati properti dari penglihatan
manusia yang mendekati fungsi pangkat (Poynton, 1998).
2.9. Sistem Pengenalan Wajah
Sistem pengenalan wajah merupakan aplikasi komputer yang digunakan untuk
mengidentifikasi atau memverifikasi seseorang dari suatu citra wajah. Menurut Jain et al.
(2007, p. 2), sistem pengenalan wajah secara umum terdiri dari empat modul, yaitu:

28
1. Deteksi wajah
Proses deteksi wajah berusaha untuk menentukan segment-segment bagian wajah
agar terpisah dengan bagian latar (background). Sebuah pendeteksi wajah yang
ideal mampu mengidentifikasi dan menemukan lokasi semua wajah yang ada di
dalam sebuah citra tanpa memperhatikan posisi, skala, orientasi, umur, dan
ekspresi. Dalam kasus video, deteksi wajah biasanya dilakukan dengan cara
tracking, yaitu mendeteksi berdasarkan citra sebelumnya tanpa deteksi ulang,
sehingga dapat dilakukan secara real time.
2. Alignment
Proses alignment berusaha untuk mendapatkan lokalisasi yang lebih akurat dan
menormalisasikan wajah. Suatu citra wajah dinormalisasikan sesuai dengan
properti geometriknya seperti ukuran wajah dan orientasi wajah dengan
menggunakan transformasi atau perubahan bentuk. Citra wajah biasanya kemudian
dinormalisasi lagi berdasarkan properti fotometrik, seperti iluminasi.
3. Ekstraksi fitur wajah
Ekstraksi fitur merupakan proses untuk mengekstrak atau mengambil informasi yang
terdapat pada citra wajah yang sudah dinormalisasi. Hasil proses ini adalah vektor
fitur (feature vector) yang merupakan bentuk lain dari representasi citra wajah.
4. Pencocokan fitur
Proses pencocokan fitur (feature matching) merupakan proses membandingkan
vektor fitur yang merupakan hasil ekstraksi citra input dengan vektor fitur yang ada
pada database. Dalam hal ini, database adalah kumpulan beberapa orang yang
sudah diidentifikasi beserta vektor fiturnya dan dibuat berdasarkan proses

29
pendaftaran (enrollment). Tingkat kesamaan tertentu antara vektor fitur dengan
database mengindikasikan suatu wajah yang dikenali atau sebaliknya.
Gambar 2.4 Alur pemrosesan pengenalan wajah
Hasil dari sistem pengenalan wajah sangat bergantung pada hasil ekstraksi yang
merepresentasikan wajah dan metode klasifikasi yang digunakan untuk membedakan
wajah yang satu dengan wajah yang lain, sementara normalisasi dan lokalisasi merupakan
basis untuk mengekstraksi fitur yang efektif (Jain, Flynn, & Ross, 2007, p. 3).
2.10. AForge.NET
Aforge.NET merupakan library yang dikhususkan pada bidang Computer Vision
dan Artificial Intelligence yang secara original dikembangkan oleh Andrew Kirillov
untuk framework .NET dalam bahasa pemrograman C# dan C++.
Aforge.NET merupakan projek yang open source. Kode sumber dan binary dari
Aforge.NET tersedia pada website www.aforge.com dan berada di bawah lisensi LGPL.
Versi pertama dari Aforge.NET dirilis ada tanggal 21 Desember 2006. Kode
Aforge.NET berfokus pada pemrosesan citra. Kemudian, kode tersebut menjadi awal dari
projek open source. Versi yang pertama kali memiliki paket instalasi adalah versi 1.2.0
yang dirilis 15 Maret 2007. Versi Aforge.NET yang paling baru adalah versi 2.2.3 yang

30
dirilis 12 Desember 2011 dengan ukuran paket instalasi sebesar 31,5 Mb, ukuran
dokumentasi adalah 13,3 Mb, dan jumlah file sumber sebanyak 455 dengan total ukuran
3,71Mb.
Fitur-fitur AForge.NET yang digunakan pada skripsi ini adalah fitur pada
framework AForge.Imaging yang memiliki fungsi-fungsi pemrosesan citra yang umum,
meliputi konvolusi, ekualisasi histogram, koreksi gamma, dan manipulasi pixel secara
langsung menggunakan class seperti UnmanagedImage dan BaseFilter.
2.11. EmguCV
EmguCV merupakan pembungkus (wrapper) .NET untuk library OpenCV yang
digunakan untuk pemrosesan citra. Library OpenCV (Open Source Computer Vision)
sendiri merupakan library yang digunakan untuk pemrosesan pada Computer Vision
secara real time, dikembangkan oleh Intel dan didukung oleh Willow Garage. Dengan
menggunakan EmguCV, fungsi OpenCV dapat dipanggil melalui bahasa yang
kompatibel dengan .NET, seperti C#, VB, VC++, IronPython, dan sebagainya.
Versi terbaru EmguCV adalah versi 2.3.0. Versi ini mengikuti versi OpenCV versi
yang sama, yaitu 2.3.0.
Fitur-fitur pada EmguCV yang digunakan dalam skripsi meliputi fungsi untuk
deteksi objek wajah dan fungsi untuk pengenalan wajah menggunakan class dengan nama
EigenObjectRecognizer. Pengenalan wajah ini menggunakan metode Principal
Component Analysis untuk mengekstraksi fitur pada citra wajah.