
BAB 2 LANDASAN TEORI 2.1 Charger
33
7 BAB 2 LANDASAN TEORI 2.1 Charger Charger adalah alat untuk mengisi daya pada baterai dengan memberikan tegangan arus untuk gadget dan lain sebagainya, dalam sebuah charger terdapat adaptor yang menjadi sebuah rangkaian elektronika yang bekerja dengan mengubah tegangan AC (bolak-balik) yang tingi menjadi DC (searah) yang rendah. Adaptor juga dikatakan sebagai pengganti batterai atau aki. Jadi dengan terciptanya alat ini, rangkaian eletronika yang membutuhkan pengisi daya baterai bisa diganti dengan adaptor. Selain sebagai pengganti baterai, adaptor juga banyak digunakan sebagai power supply atau charger baterai. Oleh sebab itu, alat ini menjadi penting di dunia elektronika. (Reko Rivani, dkk 2017) 2.2 Regulator 12V DC Regulator 12V DC memiliki fungsi untuk mengatur kesstabilan arus yang mengalir ke rangkaian elektronika. Regulator arus mempunyai seri berbeda-beda, sedangkan untuk rangkaian terpadu adalah rangkaian regulator yang menghasilkan tegangan konstan yang dapat membuat suatu rangkaian menjadi aman atau mempertahankan tegangan pada kafasitas rangkaian tersebut secara sederhana. Penstabil tegangan yang bebas dari segala gangguan seperti noise (kebisingan) ataupun fluktuasi (naik turun) sangat diperlukan untuk dapat mengoperasikan rangkaian elekttronika yang memiliki sifat digital seperti Mikrokontroler ataupun Mikroprosesor. (Rudiatmadja, 2018) Gambar 2.1 Komponen Regulator (Sumber : Teknikelektronika.com)
Transcript of BAB 2 LANDASAN TEORI 2.1 Charger
7
BAB 2
LANDASAN TEORI
2.1 Charger
Charger adalah alat untuk mengisi daya pada baterai dengan memberikan
tegangan arus untuk gadget dan lain sebagainya, dalam sebuah charger terdapat adaptor
yang menjadi sebuah rangkaian elektronika yang bekerja dengan mengubah tegangan
AC (bolak-balik) yang tingi menjadi DC (searah) yang rendah. Adaptor juga dikatakan
sebagai pengganti batterai atau aki. Jadi dengan terciptanya alat ini, rangkaian
eletronika yang membutuhkan pengisi daya baterai bisa diganti dengan adaptor. Selain
sebagai pengganti baterai, adaptor juga banyak digunakan sebagai power supply atau
charger baterai. Oleh sebab itu, alat ini menjadi penting di dunia elektronika.
(Reko Rivani, dkk 2017)
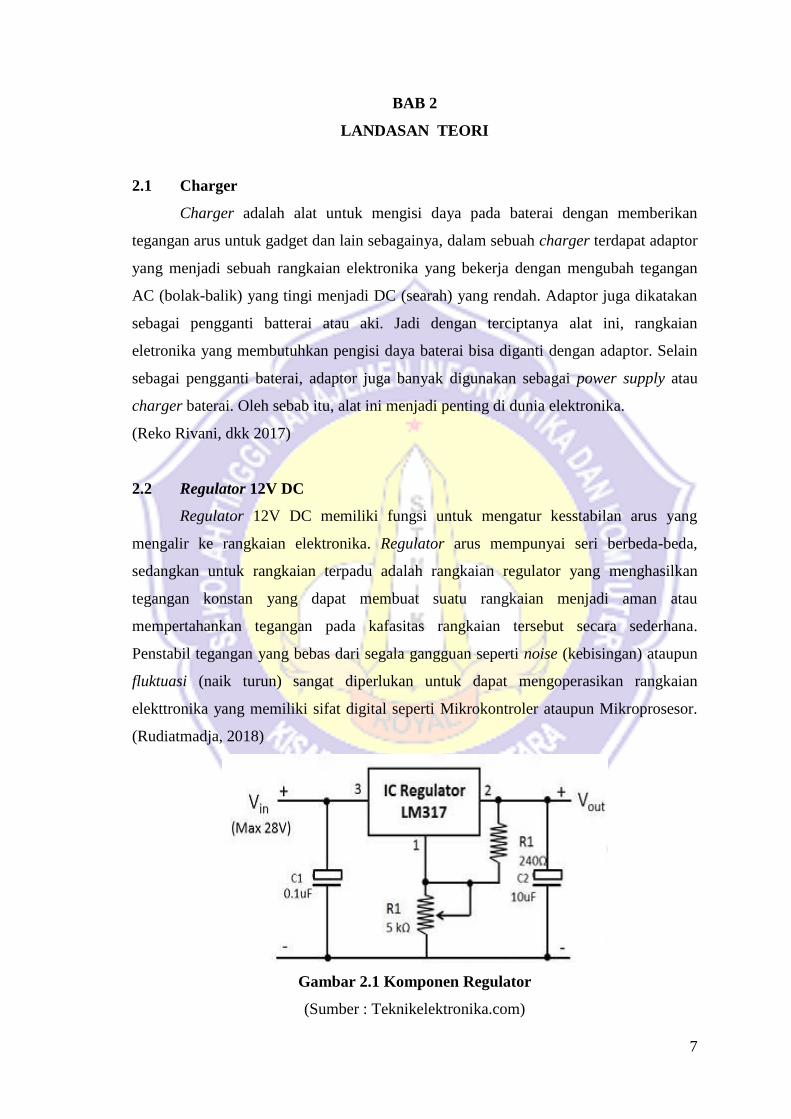
2.2 Regulator 12V DC
Regulator 12V DC memiliki fungsi untuk mengatur kesstabilan arus yang
mengalir ke rangkaian elektronika. Regulator arus mempunyai seri berbeda-beda,
sedangkan untuk rangkaian terpadu adalah rangkaian regulator yang menghasilkan
tegangan konstan yang dapat membuat suatu rangkaian menjadi aman atau
mempertahankan tegangan pada kafasitas rangkaian tersebut secara sederhana.
Penstabil tegangan yang bebas dari segala gangguan seperti noise (kebisingan) ataupun
fluktuasi (naik turun) sangat diperlukan untuk dapat mengoperasikan rangkaian
elekttronika yang memiliki sifat digital seperti Mikrokontroler ataupun Mikroprosesor.
(Rudiatmadja, 2018)
Gambar 2.1 Komponen Regulator
(Sumber : Teknikelektronika.com)

8
Rangkaian regulator ini banyak ditemukan pada adaptor yang bertugas untuk
memberikan tegangan DC untuk Laptop, Handphone, Konsol Game dan lain
sebagainya. Pada peralatan elektronika yang Power Supply atau catu dayanya
diintegrasi ke dalam unitnya seperti TV, DVD Player dan komputer dekstop, rangkaian
voltage regulator (Pengatur Tegangan) juga merupakan suatu keharusan agar tegangan
yang diberikan kepada rangkaian lainnya stabil dan bebas dari fluktuasi.
2.3 Sensor
Sensor adalah komponen yang digunakan untuk mengkonversi suatu besaran
tertentu menjadi satuan analog sehingga dapat dibaca oleh suatu rangkaian elektronik.
Sensor merupakan komponen utama dari tranduser, sedangkan tranduser merupakan
sistem yang melengkapi agar sensor tersebut mempunyai keluaran yang sesuai
diinginkan dan dapat langsung dibaca pada keluarannya. Sensor adalah tranduser yang
digunakan untuk mengubah besaran mekanis, magnetis, panas, dan kimia menjadi
tegangan dan arus listrik. Sensor sering digunakan untuk pendeteksian pada saat
melakukan pengukuran atau pengendalian.
Sensor dalam teknik pengukuran dan pengaturan secara elektronik berfungsi
mengubah tegangan fisika (misalnya: Temperatur, cahaya, gaya, kecepatan putaran)
menjadi putaran listrik yang profesional. Sensor dalam pengukuran dan pengaturan ini
harus memenuhi persyaratan-persyaratan yakni sebagai berikut:
a. Liniearitas: konversi harus benar-benar proposional, jadi karakteristik konversi
harus linier.
b. Tidak tergantung temperatur: keluaran inverter tidak boleh tergantung pada
temperatur disekelilingnya, kecuali sensor suhu.
c. Kepekaan: kepekaan sensor harus dimiliki sedemikian, sehingga pada nilai-nilai
masukan yang ada dapat diperoleh tegangan listrik yang cukup besar.
d. Waktu tanggapan adalah waktu yang diperlukan keluaran sensor untuk mencapai
nilai akhirnya pada nilai masukan yang berubah secara mendadak. Sensor harus
dapat berubah cepat bila nilai masukan pada sistem tempat sensor terus berubah.
Secara umum berdasarkan fungsi dan penggunaannya sensor dapat
dikelompokkan menjadi tiga bagian, yaitu:
a. Sensor thermal (panas)
b. Sensor mekanis
c. Sensor optik (cahaya)
9
Sensor thermal adalah sensor yang digunakan untuk mendeteksi gejala
perubahan panas/temperatur/suhu pada suatu dimensi benda atau dimensi ruang tertentu.
Contohnya: bimetal, termistor, termokopel, RTD, photo transistor, photo dioda, photo
multiplier, photovoltaik, infrared, hygrometer. Sensor mekanis adalah sensor yang
mendeteksi perubahan gerak mekanis, seperti perpindahan atau pergeseran atau posisi,
gerak lurus dan melingkar, tekanan dan aliran. Contohnya: strain gage, linear variable
deferential transformer(LVDT), proximity, potensiometer,load cell.
Sensor optik atau cahaya adalah sensor yang mendeteksi perubahan cahaya dari
sumber cahaya, pantulan cahaya, atau bias cahaya yang mengenai benda atau ruangan.
Contoh: photo cell, photo dioda.
2.3.1 Jenis-jenis sensor
Beberapa jenis sensor yang banyak digunakan dalam rangkaian elektronik antara
lain sensor cahaya, sensor suhu, sensor tegangan. Jenis sensor secara garis besar dapat
dibagi menjadi dua bagian yaitu:
1. Sensor Fisika
2. Sensor Kimia
Sensor fisika adalah sensor yang mendeteksi suatu besaran berdasarkan hukum-
hukum fisika. Yang termasuk kedalam sensor fisika yaitu:
1. Sensor suara
2. Sensor cahaya
3. Sensor suhu
4. Sensor gaya
5. Sensor percepatan
Sensor kimia adalah sensor yang mendeteksi jumlah pada suatu zat kimia
dengan cara mengubah besaran kimia menjadi besaran listrik. Biasanya ini melibatkan
beberapa reaksi kimia. Yang termasuk kedalam sensor kimia yaitu:
1. Sensor PH
2. Sensor Gas
10
2.3.2 Macam-macam sensor
Sensor digunakan untuk mendeteksi adanya perubahan lingkuangan fisika atau
kimia yang variabel keluaran dari sensor yang diubah menjadi besaran listrik menjadi
tranduser. Disini akan dibahas beberapa macam sensor yang termasuk dibagian sensor
fisika.
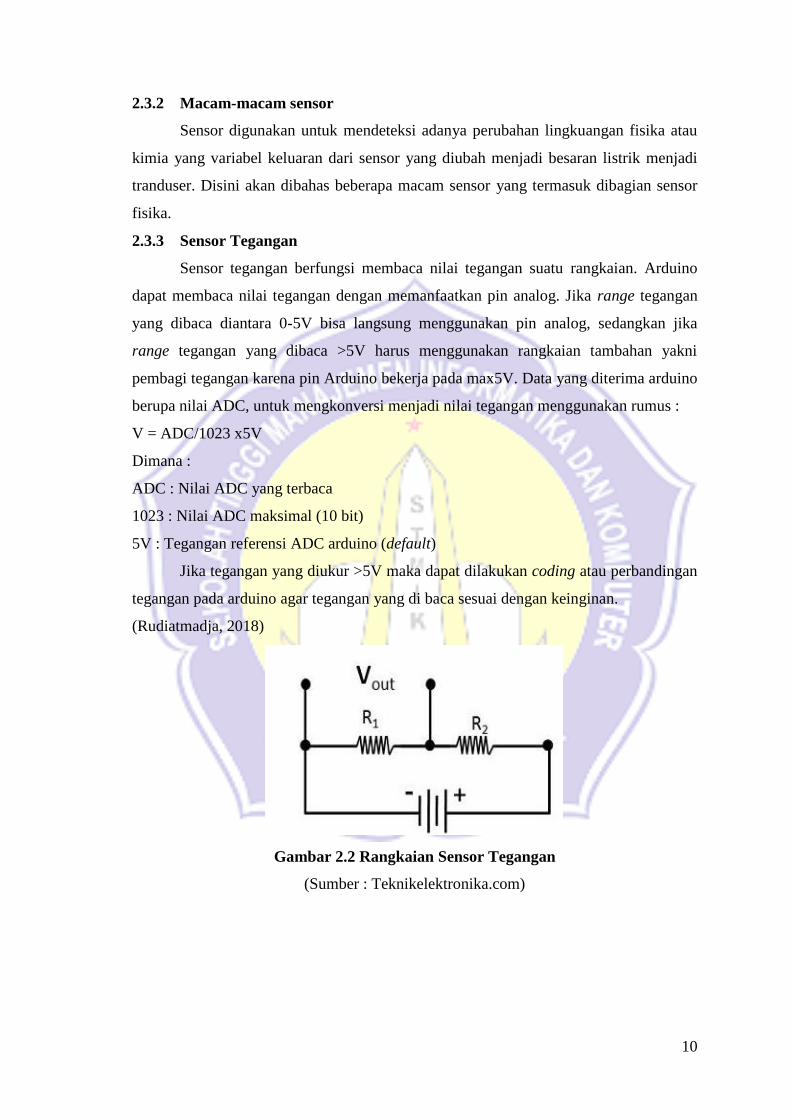
2.3.3 Sensor Tegangan
Sensor tegangan berfungsi membaca nilai tegangan suatu rangkaian. Arduino
dapat membaca nilai tegangan dengan memanfaatkan pin analog. Jika range tegangan
yang dibaca diantara 0-5V bisa langsung menggunakan pin analog, sedangkan jika
range tegangan yang dibaca >5V harus menggunakan rangkaian tambahan yakni
pembagi tegangan karena pin Arduino bekerja pada max5V. Data yang diterima arduino
berupa nilai ADC, untuk mengkonversi menjadi nilai tegangan menggunakan rumus :
V = ADC/1023 x5V
Dimana :
ADC : Nilai ADC yang terbaca
1023 : Nilai ADC maksimal (10 bit)
5V : Tegangan referensi ADC arduino (default)
Jika tegangan yang diukur >5V maka dapat dilakukan coding atau perbandingan
tegangan pada arduino agar tegangan yang di baca sesuai dengan keinginan.
(Rudiatmadja, 2018)
Gambar 2.2 Rangkaian Sensor Tegangan
(Sumber : Teknikelektronika.com)
11
2.3.4 Cara Kerja Sensor Tegangan
Prinsip kerjanya adalah membuat perbandingan antara tegangan asli dengan
tegangan yang terbaca oleh arduino. Untuk membuat rangkaian pembagi tegangan kita
harus menentukan beberapa parameter yaitu:
1. Tegangan maksimal yang diukur (Vi) = 24 Volt.
2. Tegangan maksimal ADC (Vo) = 4 Volt (atur max 5 Volt).
3. R1 = 1000Ω (bebas menyesuaikan)
Dari ketentuan diatas dapat disimpulkan ketika arduino membaca tegangan
sebesar 4V itu artinya tegangan sebenarnya adalah 24V atau Vi:Vo = 6:1. Berikut cara
menentukan nilai :
R2:R2 = Vo/Vi x (R1+R2)
R2 = 4/24 x(1000+R2)
R2 =200Ω
Berikut contoh sederhana source code sensor tegangan:
1. float vin;
2. float vout;
3. float adc;
4. #define pin_sensorT A0
5. void setup() {
6. pinMode (pin_sensorT, INPUT);
7. }
8. void loop() {
9. adc = analogRead(pin_sensorT);
10. vin = adc/1023 * 5;
11. vout = vin*6;}
2.3.5 Sensor kecepatan
Proses penginderaan sensor kecepatan merupakan proses kebalikan dari suatu
objek, dimana suatu obek berputar pada suatu genarator akan menghasilkan suatu
tegangan yang sebanding dengan kecepatan putaran objek. Kecepatan putar sering pula
diukur dengan menggunakan sensor yang mengindera pulsa magnetis (induksi) yang
timbul saat medan magnetis terjadi.
12
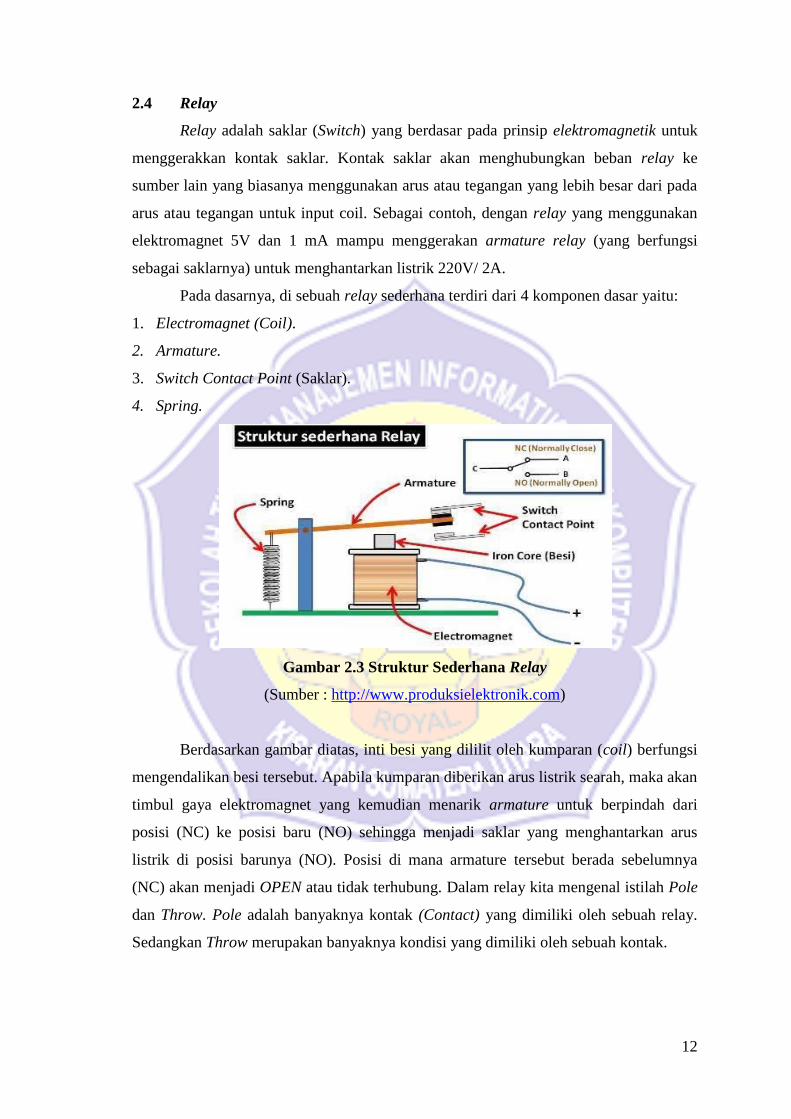
2.4 Relay
Relay adalah saklar (Switch) yang berdasar pada prinsip elektromagnetik untuk
menggerakkan kontak saklar. Kontak saklar akan menghubungkan beban relay ke
sumber lain yang biasanya menggunakan arus atau tegangan yang lebih besar dari pada
arus atau tegangan untuk input coil. Sebagai contoh, dengan relay yang menggunakan
elektromagnet 5V dan 1 mA mampu menggerakan armature relay (yang berfungsi
sebagai saklarnya) untuk menghantarkan listrik 220V/ 2A.
Pada dasarnya, di sebuah relay sederhana terdiri dari 4 komponen dasar yaitu:
1. Electromagnet (Coil).
2. Armature.
3. Switch Contact Point (Saklar).
4. Spring.
Gambar 2.3 Struktur Sederhana Relay
(Sumber : http://www.produksielektronik.com)
Berdasarkan gambar diatas, inti besi yang dililit oleh kumparan (coil) berfungsi
mengendalikan besi tersebut. Apabila kumparan diberikan arus listrik searah, maka akan
timbul gaya elektromagnet yang kemudian menarik armature untuk berpindah dari
posisi (NC) ke posisi baru (NO) sehingga menjadi saklar yang menghantarkan arus
listrik di posisi barunya (NO). Posisi di mana armature tersebut berada sebelumnya
(NC) akan menjadi OPEN atau tidak terhubung. Dalam relay kita mengenal istilah Pole
dan Throw. Pole adalah banyaknya kontak (Contact) yang dimiliki oleh sebuah relay.
Sedangkan Throw merupakan banyaknya kondisi yang dimiliki oleh sebuah kontak.
13
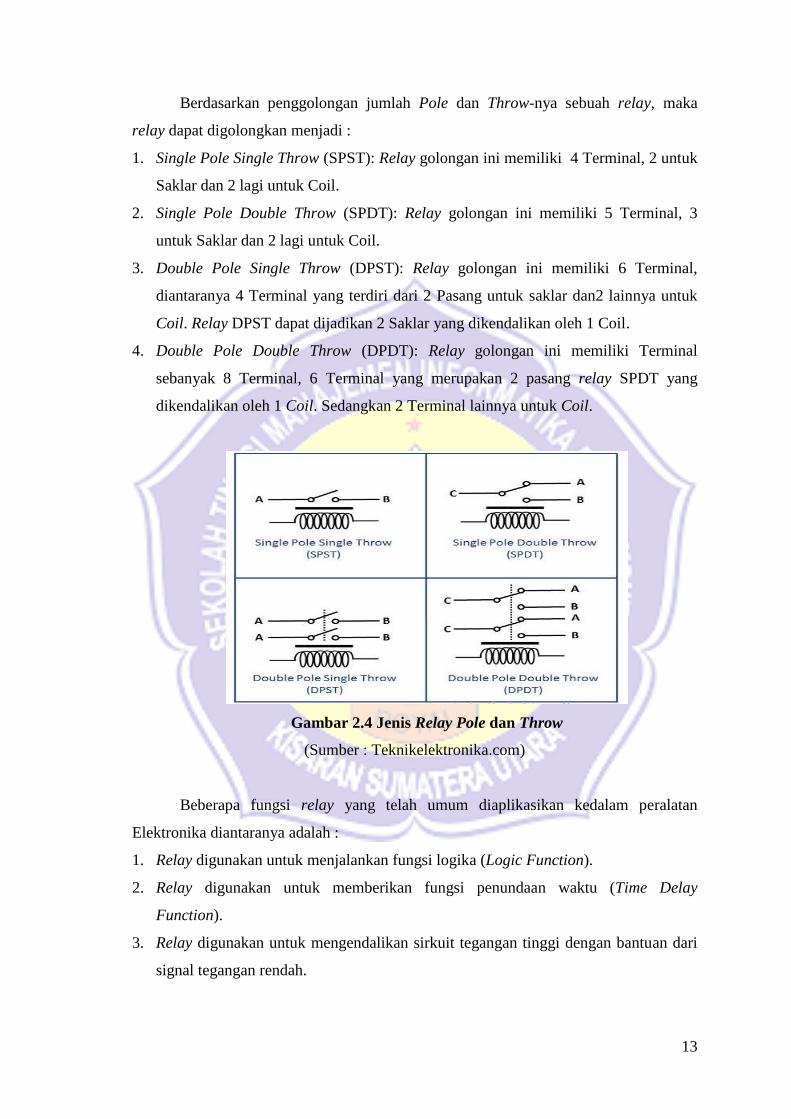
Berdasarkan penggolongan jumlah Pole dan Throw-nya sebuah relay, maka
relay dapat digolongkan menjadi :
1. Single Pole Single Throw (SPST): Relay golongan ini memiliki 4 Terminal, 2 untuk
Saklar dan 2 lagi untuk Coil.
2. Single Pole Double Throw (SPDT): Relay golongan ini memiliki 5 Terminal, 3
untuk Saklar dan 2 lagi untuk Coil.
3. Double Pole Single Throw (DPST): Relay golongan ini memiliki 6 Terminal,
diantaranya 4 Terminal yang terdiri dari 2 Pasang untuk saklar dan2 lainnya untuk
Coil. Relay DPST dapat dijadikan 2 Saklar yang dikendalikan oleh 1 Coil.
4. Double Pole Double Throw (DPDT): Relay golongan ini memiliki Terminal
sebanyak 8 Terminal, 6 Terminal yang merupakan 2 pasang relay SPDT yang
dikendalikan oleh 1 Coil. Sedangkan 2 Terminal lainnya untuk Coil.
Gambar 2.4 Jenis Relay Pole dan Throw
(Sumber : Teknikelektronika.com)
Beberapa fungsi relay yang telah umum diaplikasikan kedalam peralatan
Elektronika diantaranya adalah :
1. Relay digunakan untuk menjalankan fungsi logika (Logic Function).
2. Relay digunakan untuk memberikan fungsi penundaan waktu (Time Delay
Function).
3. Relay digunakan untuk mengendalikan sirkuit tegangan tinggi dengan bantuan dari
signal tegangan rendah.
14
4. Ada juga relay yang berfungsi untuk melindungi motor ataupun komponen lainnya
dari kelebihan tegangan ataupun hubung singkat.
(Rudiatmadja, 2018)
2.5 Baterai/Aki
Baterai adalah perangkat yang mengandung sel listrik yang dapat menyimpan
energi yang dapat dikonversi menjadi daya. Baterai menghasilkan listrik melalui proses
kimia. Baterai atau akkumulator adalah sebuah sel listrik dimana didalamnya
berlangsung proses elektrokimia yang reversible (dapat berkebalikan) dengan
efisiensinya yang tinggi. Yang dimaksud dengan reaksi elektrokimia reversibel adalah
didalam baterai dapat berlangsung proses pengubahan kimia menjadi tenaga listrik
(proses pengosongan) dan sebaliknya dari tenaga listrik menjadi tenaga kimia
(prosespengisian) dengan cara proses regenerasi dari elektroda-elektroda yang dipakai
yaitu, dengan melewatkan arus listrik dalam arah polaritas yang berlawanan didalam
sel. Baterai terdiri dari dua jenis yaitu, baterai primer dan baterai skunder.
Baterai primer merupakan baterai yang hanya dapat dipergunakan sekali
pemakaian saja dan tidak dapat diisi ulang. Hal ini terjadi karena reaksi kimia material
aktifnya tidak dapat dikembalikan. Sedangkan baterai sekunder dapat diisi ulang, karena
material aktifnya didalam dapat diputar kembali. Kelebihan dari pada baterai sekunder
adalah harganya lebih efisien untuk penggunaan jangka waktu yang panjang. Jenis aki
yang sering digunakan adalah jenis asam (lead acid) dan basa (alkali), sehimgga di
bawah akan dibahas kedua jenis baterai tersebut.
2.5.1 Aki Asam (Lead Acid Storage Acid)
Baterai asam yang bahan elektrolitnya adalah larutan asam belerang (sulfuric
acid = H2SO4). Didalam baterai asam, elektroda-elektroda nya terdiri dari plat-plat
timah peroksida PbO2 (Lead Peroxide) sebagai anoda (kutub positif) dan timah murni
PB (lead sponge) sebagai katoda (kutub negatif). Ciri-ciri umumnya:
1. Tegangan nominal per sel 2 volt.
2. Ukuran baterai per sel lebih besar dibandingkan dengan baterai alkali.
3. Nilai berat jenis elektrolit sebanding dengan kapasitas baterai.
4. Suhu elektrolit sangat mempengaruhi terhadap nilai berat jenis elektrolit, semakin
tinggi suhu elektrolit semakin rendah berat jenis dan sebaliknya.
5. Nilai jenis berat standart elektrolit tergantung dari pabrik pembuatnya.
15
6. Umur baterai tergantung pada operasi dan pemeliharaan biasanya bisa mencapai 10-
15 tahun.
7. Tegangan pengisian per sel harus sesuai dengan petunjuk operasi dan pemeliharahan
dari pabrik pembuat. Sebagai contoh adalah:
a. Pengisian awal (Initial Charge) : 2, 7 Volt.
b. Pengisian Floating : 2,18 Volt.
c. Pengisian Equalizing: 2,25 Volt.
d. Pengisian Boozting: 2,37 Volt.
e. Tegangan pengosongan per sel (Discharge) : 2,0 - 1,8 Volt.
2.5.2 Baterai Basa Alkali (Alkaline Storage Battery)
Baterai alkali bahan elektrolitnya adalah larutan alkali (Potassium Hydroxide)
yang terdiri dari:
1. Nickel iron alkaline battery Ni-Fe Battery.
2. Nickel cadmium alkaline battery Ni Cd Battery
Pada umumnya yang paling banyak digunakan adalah baterai alkali admium
(Ni-Cd ). Ciri-ciri umum (tergantung pabrik pembuat) adalah sebagai berikut:
1. Tegangan nominal per sel adalah 1,2 volt.
2. Nilai jenis berat elektroit tidak sebanding dengan kapasitas baterai.
3. Umur baterai tergantung pada penggunaan dan perawatan, biasanya dapat mencapai
15 - 20 tahun.
4. Tegangan pengisian per sel harus sesuai dengan petunjuk operasi dan pemeliharahan
dari pabrik pembuat. Sebagai contoh adalah:
a. Pengisian awal (Initial Charge) : 1,6 – 1,9 Volt.
b. Pengisian Floating : 1,40 – 1,42 Volt.
c. Pengisian Equalizing: 1,45 Volte.
d. Tegangan pengosongan (discharge) = 1 volt
16
2.5.3 Prinsip Kerja Aki
1. Siklus Pemakaian Aki
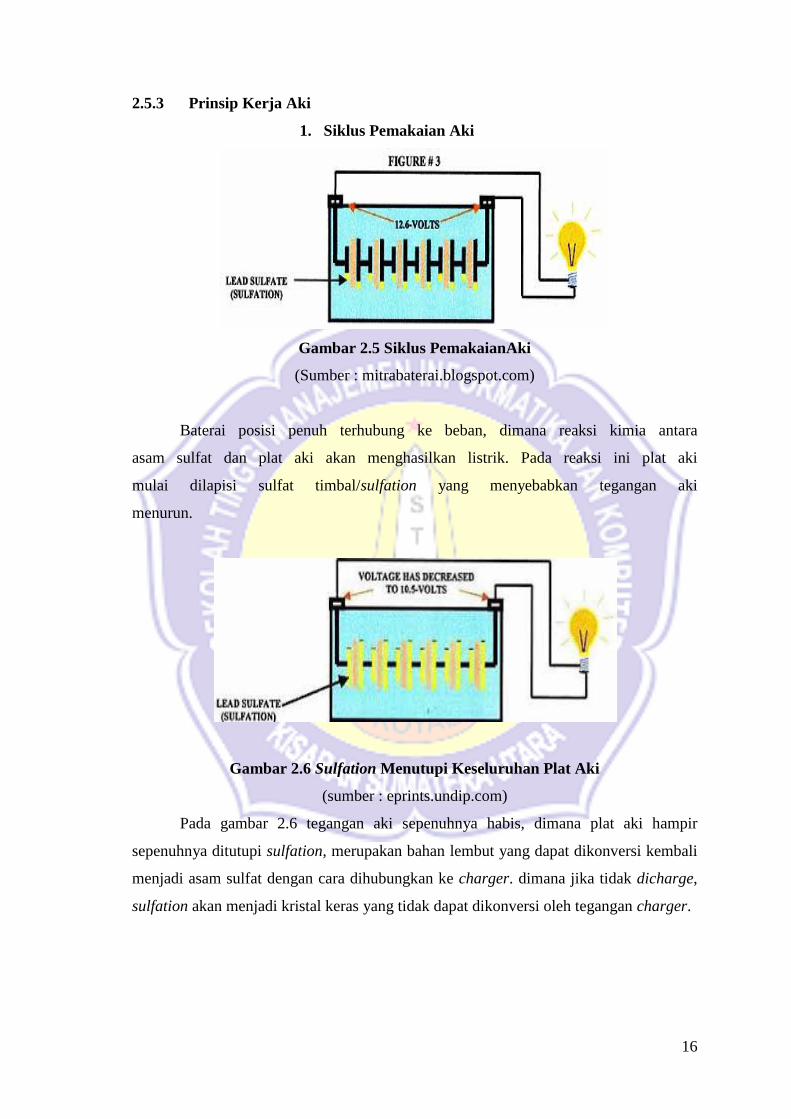
Gambar 2.5 Siklus PemakaianAki
(Sumber : mitrabaterai.blogspot.com)
Baterai posisi penuh terhubung ke beban, dimana reaksi kimia antara
asam sulfat dan plat aki akan menghasilkan listrik. Pada reaksi ini plat aki
mulai dilapisi sulfat timbal/sulfation yang menyebabkan tegangan aki
menurun.
Gambar 2.6 Sulfation Menutupi Keseluruhan Plat Aki
(sumber : eprints.undip.com)
Pada gambar 2.6 tegangan aki sepenuhnya habis, dimana plat aki hampir
sepenuhnya ditutupi sulfation, merupakan bahan lembut yang dapat dikonversi kembali
menjadi asam sulfat dengan cara dihubungkan ke charger. dimana jika tidak dicharge,
sulfation akan menjadi kristal keras yang tidak dapat dikonversi oleh tegangan charger.
17
2. Siklus Pengisian AKI
A
B
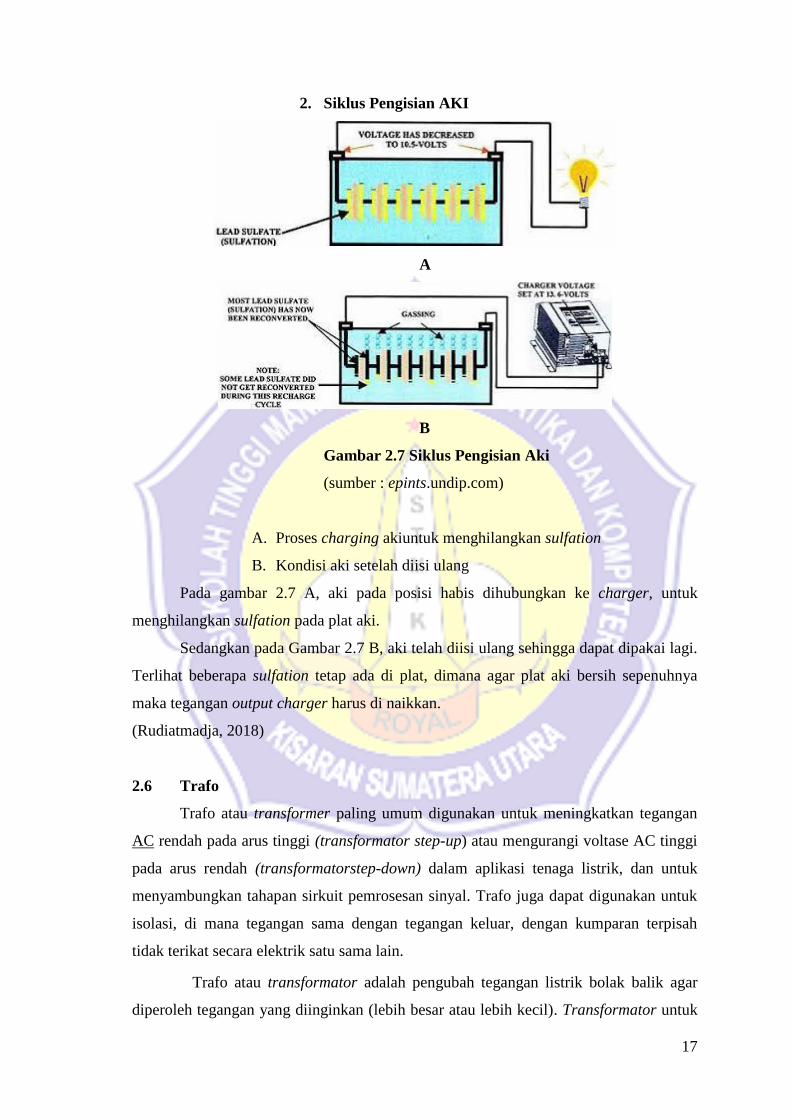
Gambar 2.7 Siklus Pengisian Aki
(sumber : epints.undip.com)
A. Proses charging akiuntuk menghilangkan sulfation
B. Kondisi aki setelah diisi ulang
Pada gambar 2.7 A, aki pada posisi habis dihubungkan ke charger, untuk
menghilangkan sulfation pada plat aki.
Sedangkan pada Gambar 2.7 B, aki telah diisi ulang sehingga dapat dipakai lagi.
Terlihat beberapa sulfation tetap ada di plat, dimana agar plat aki bersih sepenuhnya
maka tegangan output charger harus di naikkan.
(Rudiatmadja, 2018)
2.6 Trafo
Trafo atau transformer paling umum digunakan untuk meningkatkan tegangan
AC rendah pada arus tinggi (transformator step-up) atau mengurangi voltase AC tinggi
pada arus rendah (transformatorstep-down) dalam aplikasi tenaga listrik, dan untuk
menyambungkan tahapan sirkuit pemrosesan sinyal. Trafo juga dapat digunakan untuk
isolasi, di mana tegangan sama dengan tegangan keluar, dengan kumparan terpisah
tidak terikat secara elektrik satu sama lain.
Trafo atau transformator adalah pengubah tegangan listrik bolak balik agar
diperoleh tegangan yang diinginkan (lebih besar atau lebih kecil). Transformator untuk

18
menaikkan tegangan disebut transformator step up, sedangkan transformator penurun
tegangan disebut transformator step down.
Transformator terdiri atas sebuah inti besi yang diberi lilitan primer dan
sekunder. Alat ini bekerja berdasarkan induksi elektromagnetik. Apabila terjadi
perubahan fluks magnet pada kumparan primer, maka akan diteruskan ke kumparan
sekunder dan menghasilkan gaya gerak listrik induksi dan arus induksi.
Gambar 2.8 Trafo atau Transformator
Agar selalu terjadi perubahan fluks magnet, maka arus yang masuk (input)
harus arus bolak balik (AC). Tidak ada transformator yang ideal, sehingga dalam trafo
pasti ada kehilangan energi. Hal ini disebabkan oleh adanya pemanasan joule,
pemanasan arus pusar, dan kebocoran fluks magnet. Oleh karena itu, untuk memperkecil
energi yang hilang, maka transformator dibuat dengan inti besi yang berlapis-lapis dan
dilekatkan dengan bahan isolator. Tujuannya adalah untuk mengurangi arus pusaran
(arus Eddy).
2.7 Mikrokontroler Atmega328
Mikrokontroler populer yang pertama dibuat oleh Intel pada tahun 1976, yaitu
mikrokontroler 8 bit Intel 8748. Mikrokontroler tersebut adalah bagian dari keluarga
mikrokontroler MCS 48. Sebelumnya, Texas instruments telah memasarkan
mikrokontroler 4 bit pertama yaitu TMS 1000 pada tahun 1974. TMS 1000 yang mulai
dibuat sejak 1971 adalah mikrokomputer dalam sebuah chip, lengkap dengan RAM dan
ROM.

19
Mikrokontroler merupakan chip cerdas yang menjadi tren dalam pengendalian
otomasi, terutama di kalangan mahasiswa. Dengan banyak jenis keluarga, kapasitas
memori, dan berbagai feature, mikrokontroler menjadi pilihan dalam aplikasi prosesor
mini untuk pengendalian skala kecil. Terlihat pada gambar dibawah ini:
Gambar 2.9 Mikrokontroler Atmega328
AVR merupakan seri mikrokontroler CMOS 8 bit buatan Atmel, berbasis
arsitektur RISC (Reduced Instruction Set Computer). Hampir semua instruksi dieksekusi
dalam satu siklus clock. AVR mempunyai 32 register general purpose, timer/counter
fleksibel dengan mode compare, interupt internal dan external, serial UART,
programmable Watchdog Timer, dan mode power saving. Beberapa diantaranya
mempunyai ADC dan PWM internal. AVR juga mempunyai In System Programmable
Flash on chip yang mengijinkan memori program untuk diprogram ulang dalam sistem
menggunakan hubungan serial SPI. Chip AVR yang digunakan untuk Tugas Akhir ini
adalah Atmega328.
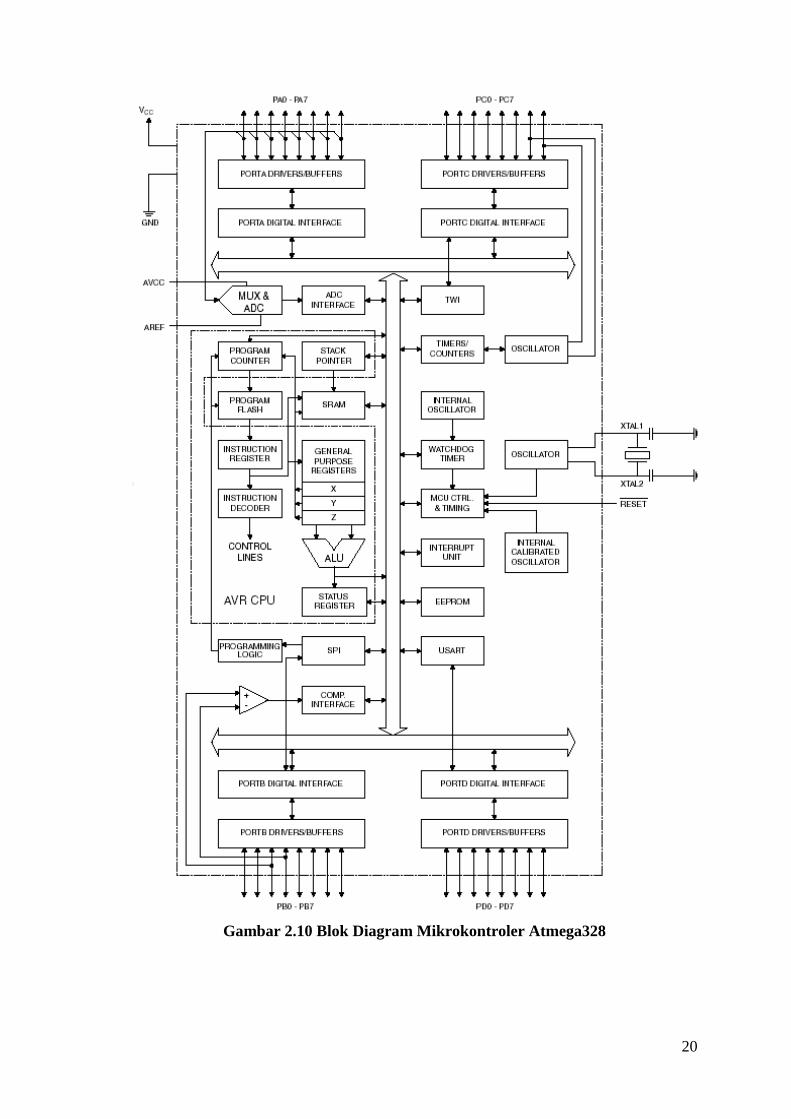
Atmega328 adalah mikrokontroler CMOS 8 bit daya rendah berbasis arsitektur
RISC yang ditingkatkan. Kebanyakan instruksi dikerjakan pada satu siklus clock,
Atmega328 mempunyai throughput mendekati 1 MIPS per MHz membuat desain
sistem untuk mengoptimalisasi konsumsi daya versus kecepatan proses. Blok diagram
dari mikrokontroler dapat dilihat pada gambar dibawah ini:
20
Gambar 2.10 Blok Diagram Mikrokontroler Atmega328
21
Mikrokontroler Atmega328 memiliki beberapa fitur diantaranya:
1. 8 bit AVR berbasis RISC dengan performa tinggi dan konsumsi daya rendah.
2. Kecepatan maksimal 16 MHz.
3. Memori:
a. 8 KB Flash
b. 512 byte SRAM
c. 512 byte EFROM
4. Timer/counter:
a. 2 buah 8 bit timer/counter
b. 1 buah 16 bit timer/counter
c. 4 kanal PWM
5. 8 kanal 10/8 bit ADC.
6. Programable serial USART.
7. Komparator analog.
8. 6 pilihan sleep mode untuk penghematan daya listrik.
9. 32 jalur I/O yang bisa diprogram.
2.7.1 Pena-pena Atmega328
Konfigurasi Pin Mikrokontroler Atmega328 dengan kemasan 40 pin DIP (dual
in line package) dapat dilihat pada Gambar 5 Untuk memaksimalkan performa dan
paralelisme, AVR menggunakan arsitektur Harvard (dengan memori dan bus terpisah
untuk program dan data). Arsitektur CPU dari AVR ditunjukkan oleh gambar 6
Instruksi pada memori program dieksekusi dengan 10 pipelining single level. Selagi
sebuah instruksi sedang dikerjakan, instruksi berikutnya diambil dari memori program.
22
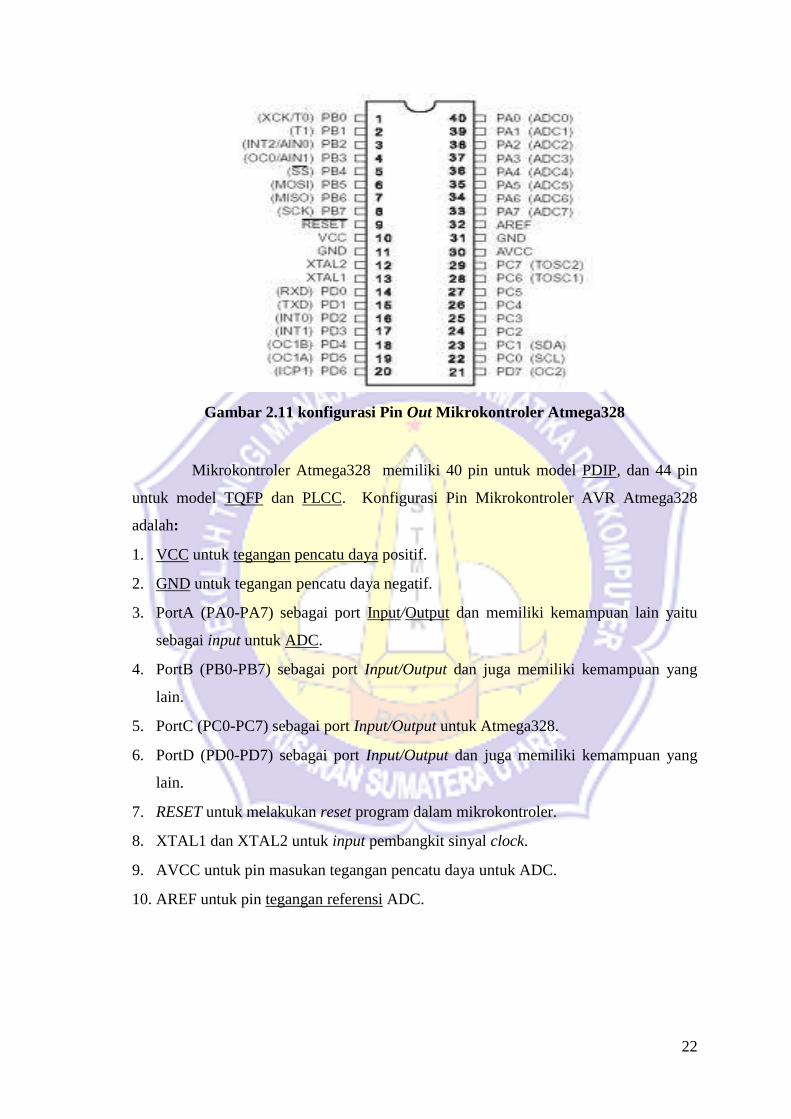
Gambar 2.11 konfigurasi Pin Out Mikrokontroler Atmega328
Mikrokontroler Atmega328 memiliki 40 pin untuk model PDIP, dan 44 pin
untuk model TQFP dan PLCC. Konfigurasi Pin Mikrokontroler AVR Atmega328
adalah:
1. VCC untuk tegangan pencatu daya positif.
2. GND untuk tegangan pencatu daya negatif.
3. PortA (PA0-PA7) sebagai port Input/Output dan memiliki kemampuan lain yaitu
sebagai input untuk ADC.
4. PortB (PB0-PB7) sebagai port Input/Output dan juga memiliki kemampuan yang
lain.
5. PortC (PC0-PC7) sebagai port Input/Output untuk Atmega328.
6. PortD (PD0-PD7) sebagai port Input/Output dan juga memiliki kemampuan yang
lain.
7. RESET untuk melakukan reset program dalam mikrokontroler.
8. XTAL1 dan XTAL2 untuk input pembangkit sinyal clock.
9. AVCC untuk pin masukan tegangan pencatu daya untuk ADC.
10. AREF untuk pin tegangan referensi ADC.
23
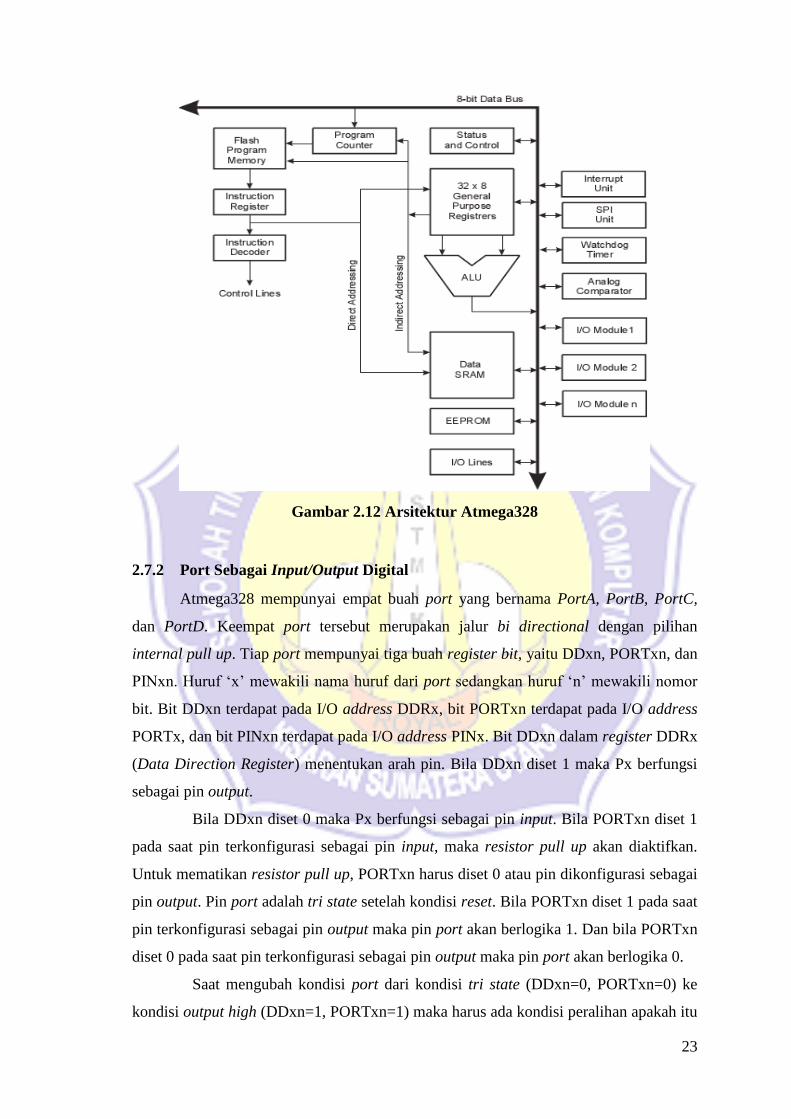
Gambar 2.12 Arsitektur Atmega328
2.7.2 Port Sebagai Input/Output Digital
Atmega328 mempunyai empat buah port yang bernama PortA, PortB, PortC,
dan PortD. Keempat port tersebut merupakan jalur bi directional dengan pilihan
internal pull up. Tiap port mempunyai tiga buah register bit, yaitu DDxn, PORTxn, dan
PINxn. Huruf ‘x’ mewakili nama huruf dari port sedangkan huruf ‘n’ mewakili nomor
bit. Bit DDxn terdapat pada I/O address DDRx, bit PORTxn terdapat pada I/O address
PORTx, dan bit PINxn terdapat pada I/O address PINx. Bit DDxn dalam register DDRx
(Data Direction Register) menentukan arah pin. Bila DDxn diset 1 maka Px berfungsi
sebagai pin output.
Bila DDxn diset 0 maka Px berfungsi sebagai pin input. Bila PORTxn diset 1
pada saat pin terkonfigurasi sebagai pin input, maka resistor pull up akan diaktifkan.
Untuk mematikan resistor pull up, PORTxn harus diset 0 atau pin dikonfigurasi sebagai
pin output. Pin port adalah tri state setelah kondisi reset. Bila PORTxn diset 1 pada saat
pin terkonfigurasi sebagai pin output maka pin port akan berlogika 1. Dan bila PORTxn
diset 0 pada saat pin terkonfigurasi sebagai pin output maka pin port akan berlogika 0.
Saat mengubah kondisi port dari kondisi tri state (DDxn=0, PORTxn=0) ke
kondisi output high (DDxn=1, PORTxn=1) maka harus ada kondisi peralihan apakah itu
24
kondisi pull up enabled (DDxn=0, PORTxn=1) atau kondisi output low (DDxn=1,
PORTxn=0). Biasanya, kondisi pull up enable dapat diterima sepenuhnya, selama
lingkungan impedansi tinggi tidak memperhatikan perbedaan antara sebuah strong high
driver dengan sebuah pull up.
Jika ini bukan suatu masalah, maka bit PUD pada register SFIOR dapat diset 1
untuk mematikan semua pull up dalam semua port. Peralihan dari kondisi input dengan
pull up ke kondisi output low juga menimbulkan masalah yang sama. Maka harus
menggunakan kondisi tri state (DDxn=0, PORTxn=0) atau kondisi output high
(DDxn=1, PORTxn=0) sebagai kondisi transisi. Lebih detail mengenai port ini dapat
dilihat pada manual data sheet dari IC Atmega328.
2.7.3 Organisasi Memori AVR Atmega328
AVR arsitektur mempunyai dua ruang memori utama, ruang data memori dan
ruang program memori. Sebagai tambahan, Atmega328 memiliki feature suatu
EEPROM memori untuk penyimpanan data. Semua tiga ruang memori adalah reguler
dan linier.
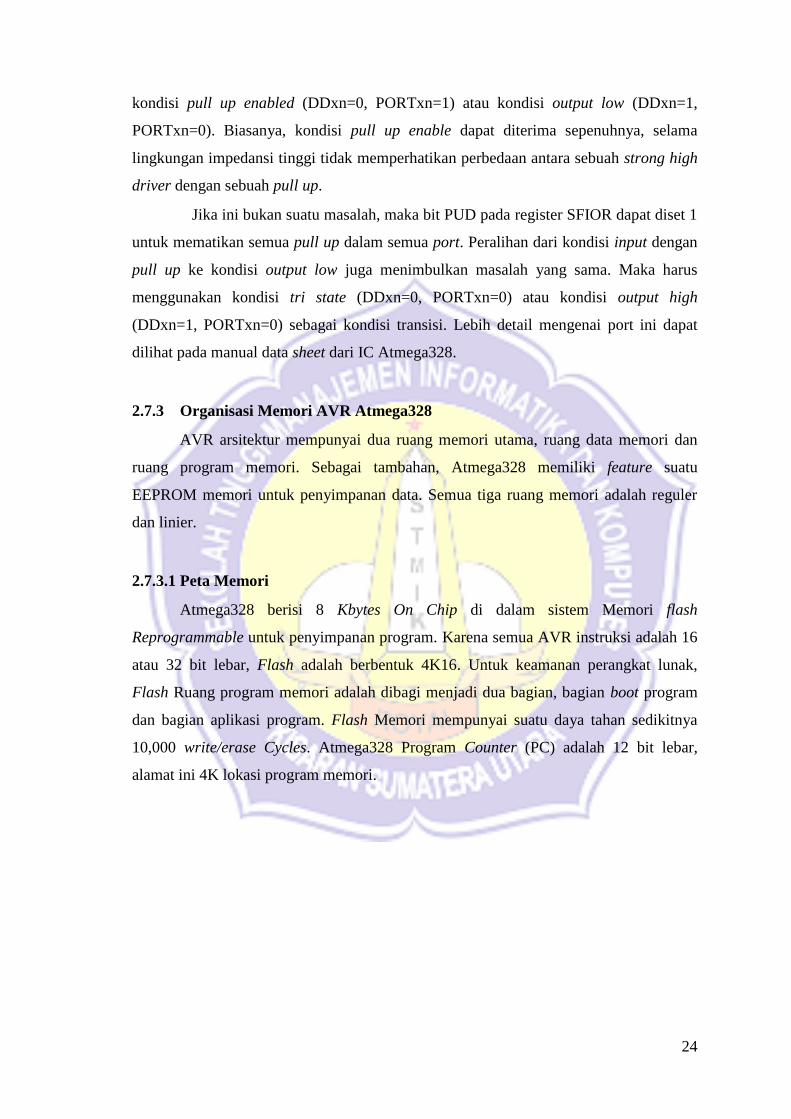
2.7.3.1 Peta Memori
Atmega328 berisi 8 Kbytes On Chip di dalam sistem Memori flash
Reprogrammable untuk penyimpanan program. Karena semua AVR instruksi adalah 16
atau 32 bit lebar, Flash adalah berbentuk 4K16. Untuk keamanan perangkat lunak,
Flash Ruang program memori adalah dibagi menjadi dua bagian, bagian boot program
dan bagian aplikasi program. Flash Memori mempunyai suatu daya tahan sedikitnya
10,000 write/erase Cycles. Atmega328 Program Counter (PC) adalah 12 bit lebar,
alamat ini 4K lokasi program memori.
25
Gambar 2.13 Memori Program AVR Atmega328
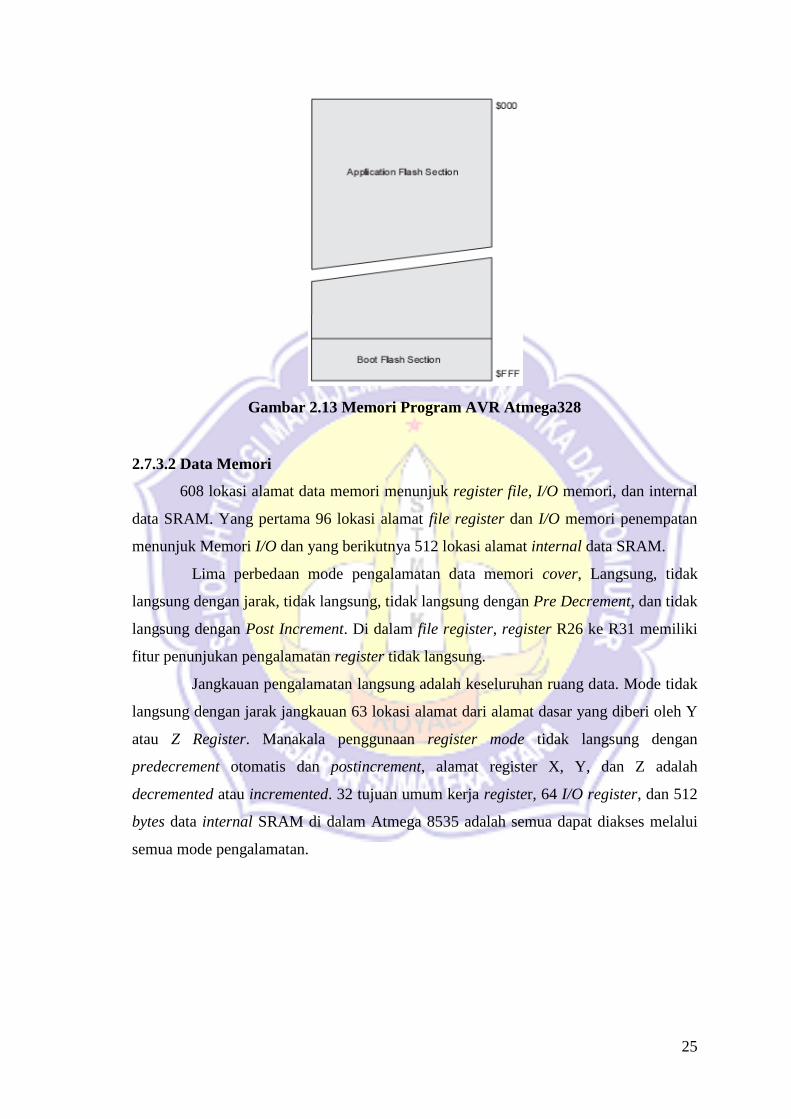
2.7.3.2 Data Memori
608 lokasi alamat data memori menunjuk register file, I/O memori, dan internal
data SRAM. Yang pertama 96 lokasi alamat file register dan I/O memori penempatan
menunjuk Memori I/O dan yang berikutnya 512 lokasi alamat internal data SRAM.
Lima perbedaan mode pengalamatan data memori cover, Langsung, tidak
langsung dengan jarak, tidak langsung, tidak langsung dengan Pre Decrement, dan tidak
langsung dengan Post Increment. Di dalam file register, register R26 ke R31 memiliki
fitur penunjukan pengalamatan register tidak langsung.
Jangkauan pengalamatan langsung adalah keseluruhan ruang data. Mode tidak
langsung dengan jarak jangkauan 63 lokasi alamat dari alamat dasar yang diberi oleh Y
atau Z Register. Manakala penggunaan register mode tidak langsung dengan
predecrement otomatis dan postincrement, alamat register X, Y, dan Z adalah
decremented atau incremented. 32 tujuan umum kerja register, 64 I/O register, dan 512
bytes data internal SRAM di dalam Atmega 8535 adalah semua dapat diakses melalui
semua mode pengalamatan.
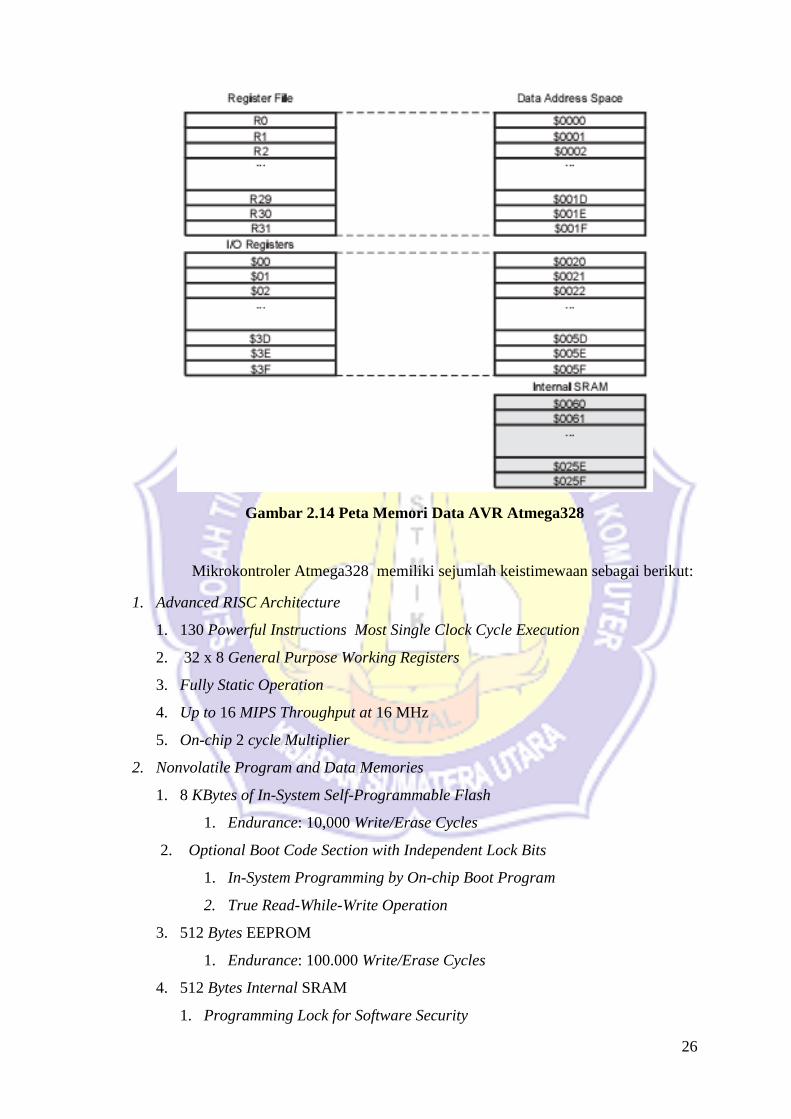
26
Gambar 2.14 Peta Memori Data AVR Atmega328
Mikrokontroler Atmega328 memiliki sejumlah keistimewaan sebagai berikut:
1. Advanced RISC Architecture
1. 130 Powerful Instructions Most Single Clock Cycle Execution
2. 32 x 8 General Purpose Working Registers
3. Fully Static Operation
4. Up to 16 MIPS Throughput at 16 MHz
5. On-chip 2 cycle Multiplier
2. Nonvolatile Program and Data Memories
1. 8 KBytes of In-System Self-Programmable Flash
1. Endurance: 10,000 Write/Erase Cycles
2. Optional Boot Code Section with Independent Lock Bits
1. In-System Programming by On-chip Boot Program
2. True Read-While-Write Operation
3. 512 Bytes EEPROM
1. Endurance: 100.000 Write/Erase Cycles
4. 512 Bytes Internal SRAM
1. Programming Lock for Software Security
27
3. Peripheral Features
1. Two 8-bit Timer/Counters with Separate Prescalers and Compare Modes.
2. One 16-bit Timer/Counter with Separate Prescaler, Compare Mode, and
Capture Mode.
3. Real Time Counter with Separate Oscillator.
4. Four PWM Channels.
5. 8 channel, 10 bit ADC.
1. 8 Single-ended Channels
2. 7 Differential Channels for TQFP Package Only
3. 2 Differential Channels with Programmable Gain at 1x, 10x, or 200x for
TQFP Package Only
1. Byte-oriented Two-wire Serial Interface.
2. Programmable Serial USART.
3. Master/Slave SPI Serial Interface.
4. Programmable Watchdog Timer with Separate On chip Oscillator.
5. On chip Analog Comparator.
4. Special Microcontroller Features
1. Two 8 bit Timer/Counters with Separate Prescalers and Compare Modes.
2. One 16 bit Timer/Counter with Separate Prescaler, Compare Mode, and
Capture Mode.
3. Real Time Counter with .
4. 8 channel, 10 bit ADC.
1. 8 Single-ended Channels
2. 7 Differential Channels for TQFP Package Only
3. 2 Differential Channels with Programmable Gain at 1x,10x, or 200x for
TQFP Package Only
1. Byte oriented Two-wire Serial Interface.
2. Programmable Serial USART.
3. Master/Slave SPI Serial Interface..
4. Programmable Watchdog Timer with Separate On chip Oscillator.
5. On chip Analog Comparator.
28
5. Special Microcontroller Features
1. Power on Reset and Programmable Brown-out Detection o Internal Calibrated
RC Oscillator.
2. External and Internal Interrupt Sources.
3. Six Sleep Modes: Idle, ADC Noise Reduction, Power-save, Power down,
Standby and Extended Standby.
6. I/O and Packages
1. 32 Programmable I/O Lines
2. 40-pin PDIP, 44-lead TQFP, 44-lead PLCC, and 44-pad MLF
7. Operating Voltages
1. 2.7-5.5V for Atmega328L
2. 4.5-5.5V for Atmega328
8. Speed Grades
1. 0-8 MHz for Atmega328
2. 0-6 MHz for Atmega328
2.7.4 Persamaan dan Perbedaan Antara Mikrokontroler dan Mikrokomputer
Jika kita bicara tentang Mikrokontroler, maka tidak terlepas dengan pengertian
atau definisi tentang Komputer itu sendiri, ada kesamaan-kesamaan antara
Mikrokontroler dengan Komputer (atau Mikrokomputer), antara lain:
Mikrokontroler adalah versi mini dan untuk aplikasi khusus dari
Mikrokomputer atau Komputer. Berikut ini adalah daftar kesamaan dengan menekankan
pada perbedaan antara Mikrokontroler dan Mikrokomputer antara lain:
1. CPU pada Mikrokomputer berada external dalam suatu sistem, sampai saat ini
kecepatan operasionalnya sudah mencapai tingkat lebih dari 2 GHz, sedangkan CPU
pada Mikrokontroler berada internal dalam sebuah chip, kecepatan bekerja masih
cukup rendah, dalam orde MHz (misalnya, 24 MHz, 40 MHz dan lain sebagainya).
Kecepatan yang relatif rendah ini sudah mencukupi untuk aplikasi-aplikasi berbasis
mikrokontroler.
2. Jika CPU pada mikrokomputer menjalankan program dalam ROM atau yang lebih
dikenal dengan BIOS pada saat awal dihidupkan, kemudian mengambil atau
menjalankan program yang tersimpan dalam hard disk. Sedangkan mikrokontroler
sejak awal menjalankan program yang tersimpan dalam ROM internal nya (bisa
29
berupa Mask ROM atau Flash PEROM). Sifat memori program ini non volatile,
artinya tetap akan tersimpan walaupun tidak diberi catu daya.
3. RAM pada mikrokomputer bisa mencapai ukuran sekian MByte dan bisa di upgrade
ke ukuran yang lebih besar dan berlokasi di luar chip CPU nya, sedangkan RAM
pada mikrokontroler ada di dalam chip mikrokontroler yang bersangkutan dan
ukurannya sangat minim, misalnya 128 byte, 256 byte dan seterusnya dan ukuran
yang relatif kecil ini pun dirasa cukup untuk aplikasi-aplikasi mikrokontroler.
4. Keluaran dan masukan pada mikrokomputer jauh lebih kompleks dibandingkan
dengan mikrokontroler, yang jauh lebih sederhana, selain itu, pada mikrokontroler
tingkat akses keluaran dan masukan bisa dalam satuan per bit.
5. Jika diamati lebih lanjut, bisa dikatakan bahwa Mikrokomputer atau Komputer
merupakan komputer serbaguna atau general purpose computer, bisa dimanfaatkan
untuk berbagai macam aplikasi (atau perangkat lunak). Sedangkan mikrokontroler
adalah special purpose computer atau komputer untuk tujuan khusus, hanya satu
macam aplikasi saja.
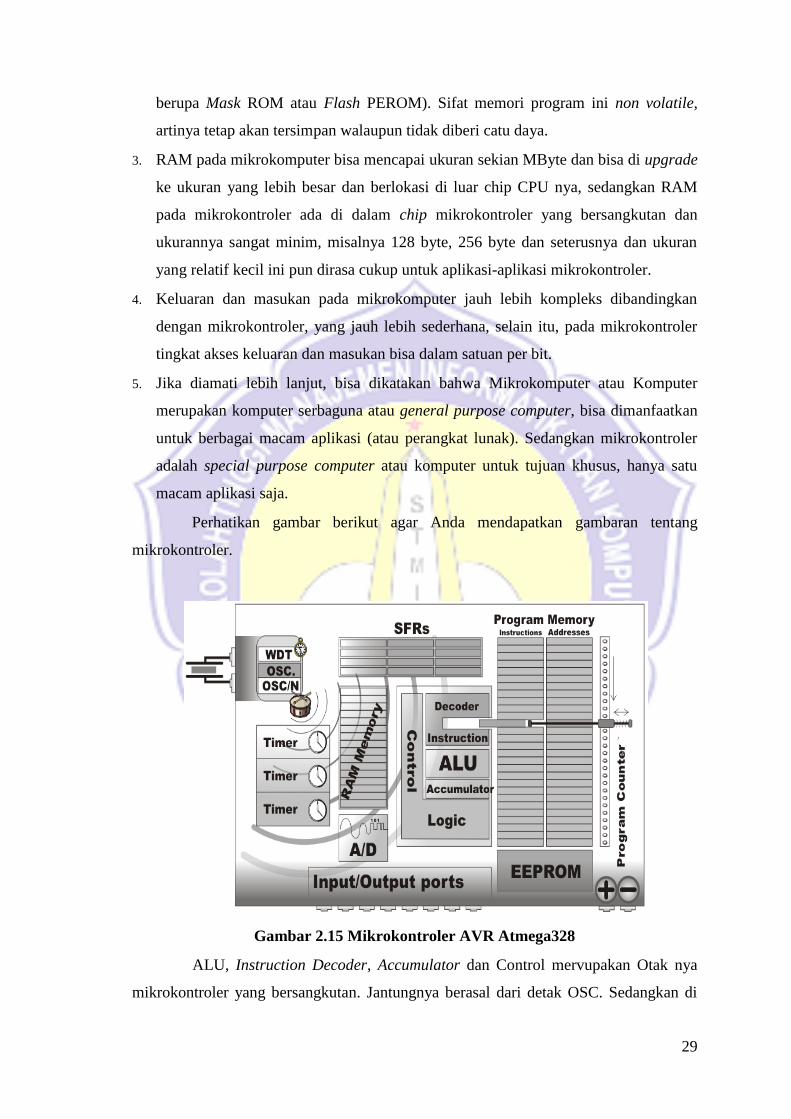
Perhatikan gambar berikut agar Anda mendapatkan gambaran tentang
mikrokontroler.
Gambar 2.15 Mikrokontroler AVR Atmega328
ALU, Instruction Decoder, Accumulator dan Control mervupakan Otak nya
mikrokontroler yang bersangkutan. Jantungnya berasal dari detak OSC. Sedangkan di
30
sekeliling ‘Otak’ terdapat berbagai macam periferal seperti SFR (Special Function
Register yang bertugas menyimpan data-data sementara selama proses berlangsung),
Memori RAM (tugas hampir sama seperti SFR hanya saja tidak berhubungan langsung
selama proses operasional mikrokontroler), ADC (untuk mengubah data-data analog
menjadi digital untuk diolah atau diproses lebih lanjut), EEPROM (sama seperti RAM
hanya saja tetap akan menyimpan data walaupun tidak mendapatkan sumber
listrik/daya) dan port-port I/O untuk masukan/luaran, untuk melakukan komunikasi
dengan pihak-pihak eksternal mikrokontroler (sensor dan aktuator).
Ciri khas mikrokontroler lainnya, antara lain:
1. ‘Tertanam’ (atau embedded) dalam beberapa piranti atau yang dikenal dengan istilah
embedded system atau embedded controller.
2. Terdedikasi untuk satu macam aplikasi saja.
3. Hanya membutuhkan daya yang rendah (low power) sekitar 50 mWatt (bandingkan
dengan komputer yang bisa mencapai 50 Watt lebih).
4. Memiliki beberapa keluaran maupun masukan yang terdedikasi, untuk tujuan atau
fungsi-fungsi khusus.
5. Kecil dan relatif lebih murah.
6. Seringkali tahan banting, terutama untuk aplikasi-aplikasi yang berhubungan dengan
mesin atau otomotif atau militer.
31
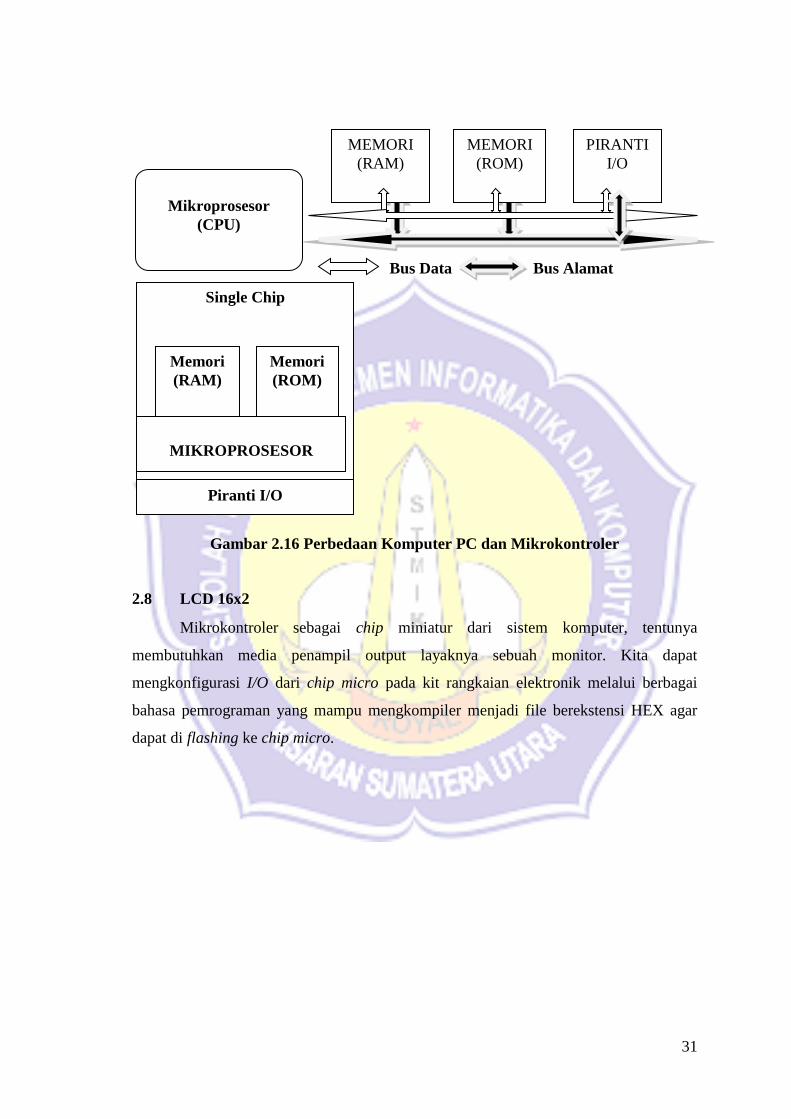
Bus Data Bus Alamat
Gambar 2.16 Perbedaan Komputer PC dan Mikrokontroler
2.8 LCD 16x2
Mikrokontroler sebagai chip miniatur dari sistem komputer, tentunya
membutuhkan media penampil output layaknya sebuah monitor. Kita dapat
mengkonfigurasi I/O dari chip micro pada kit rangkaian elektronik melalui berbagai
bahasa pemrograman yang mampu mengkompiler menjadi file berekstensi HEX agar
dapat di flashing ke chip micro.
Mikroprosesor
(CPU)
MEMORI
(RAM)
MEMORI
(ROM)
PIRANTI
I/O
Single Chip
Memori
(RAM)
Memori
(ROM)
MIKROPROSESOR
Piranti I/O
32
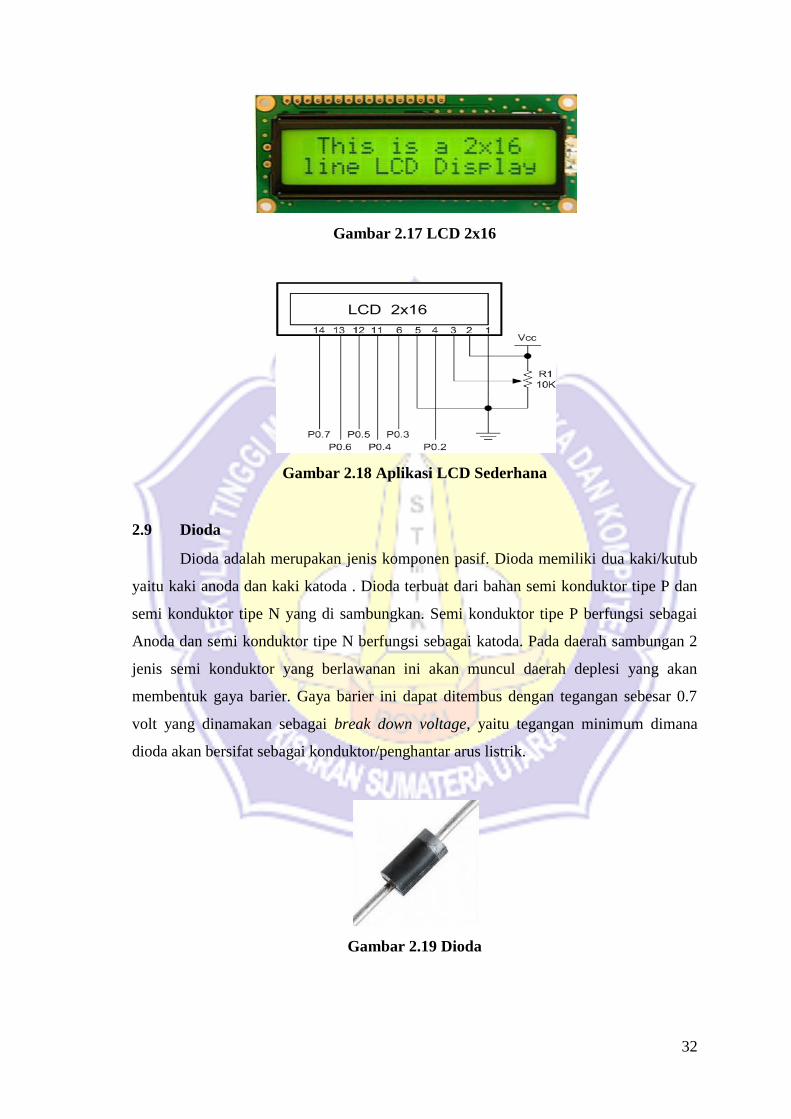
Gambar 2.17 LCD 2x16
Gambar 2.18 Aplikasi LCD Sederhana
2.9 Dioda
Dioda adalah merupakan jenis komponen pasif. Dioda memiliki dua kaki/kutub
yaitu kaki anoda dan kaki katoda . Dioda terbuat dari bahan semi konduktor tipe P dan
semi konduktor tipe N yang di sambungkan. Semi konduktor tipe P berfungsi sebagai
Anoda dan semi konduktor tipe N berfungsi sebagai katoda. Pada daerah sambungan 2
jenis semi konduktor yang berlawanan ini akan muncul daerah deplesi yang akan
membentuk gaya barier. Gaya barier ini dapat ditembus dengan tegangan sebesar 0.7
volt yang dinamakan sebagai break down voltage, yaitu tegangan minimum dimana
dioda akan bersifat sebagai konduktor/penghantar arus listrik.
Gambar 2.19 Dioda
33
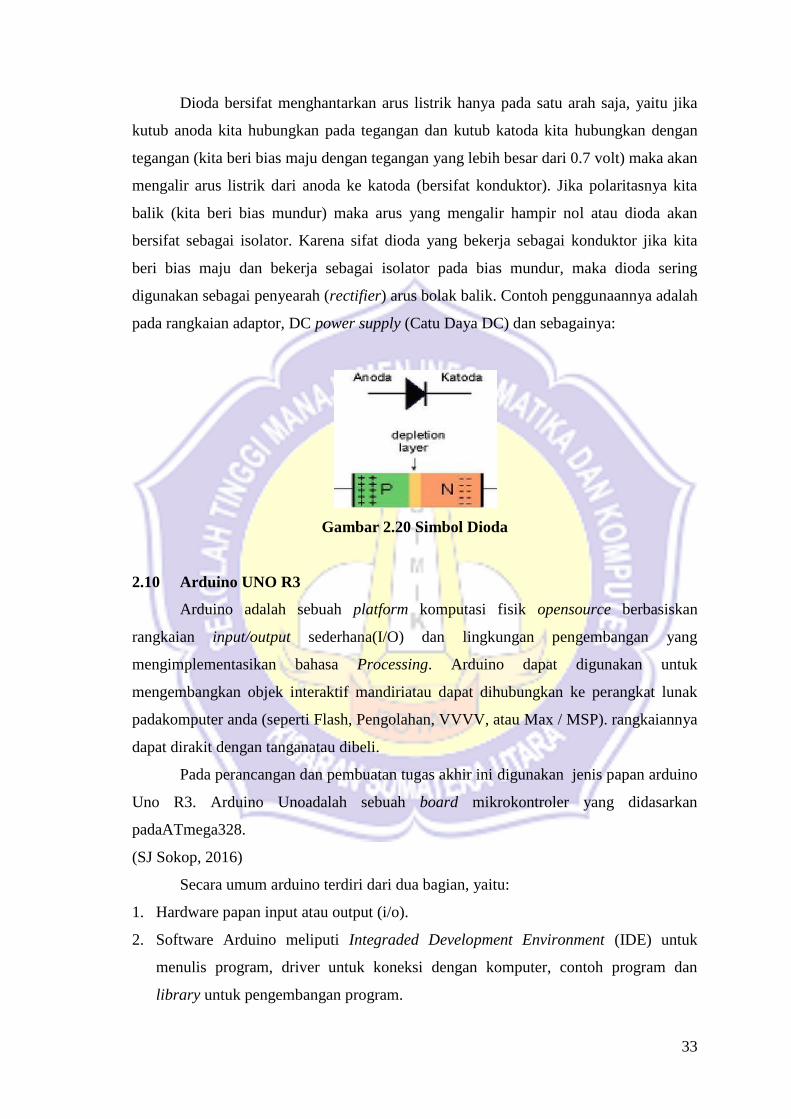
Dioda bersifat menghantarkan arus listrik hanya pada satu arah saja, yaitu jika
kutub anoda kita hubungkan pada tegangan dan kutub katoda kita hubungkan dengan
tegangan (kita beri bias maju dengan tegangan yang lebih besar dari 0.7 volt) maka akan
mengalir arus listrik dari anoda ke katoda (bersifat konduktor). Jika polaritasnya kita
balik (kita beri bias mundur) maka arus yang mengalir hampir nol atau dioda akan
bersifat sebagai isolator. Karena sifat dioda yang bekerja sebagai konduktor jika kita
beri bias maju dan bekerja sebagai isolator pada bias mundur, maka dioda sering
digunakan sebagai penyearah (rectifier) arus bolak balik. Contoh penggunaannya adalah
pada rangkaian adaptor, DC power supply (Catu Daya DC) dan sebagainya:
Gambar 2.20 Simbol Dioda
2.10 Arduino UNO R3
Arduino adalah sebuah platform komputasi fisik opensource berbasiskan
rangkaian input/output sederhana(I/O) dan lingkungan pengembangan yang
mengimplementasikan bahasa Processing. Arduino dapat digunakan untuk
mengembangkan objek interaktif mandiriatau dapat dihubungkan ke perangkat lunak
padakomputer anda (seperti Flash, Pengolahan, VVVV, atau Max / MSP). rangkaiannya
dapat dirakit dengan tanganatau dibeli.
Pada perancangan dan pembuatan tugas akhir ini digunakan jenis papan arduino
Uno R3. Arduino Unoadalah sebuah board mikrokontroler yang didasarkan
padaATmega328.
(SJ Sokop, 2016)
Secara umum arduino terdiri dari dua bagian, yaitu:
1. Hardware papan input atau output (i/o).
2. Software Arduino meliputi Integraded Development Environment (IDE) untuk
menulis program, driver untuk koneksi dengan komputer, contoh program dan
library untuk pengembangan program.

34
Pada saat ini bekerja dengan hardware berarti membuat rangkaian berbagai
komponen elektronik seperti resistor, kapasitor, transistor, dan sebagainya. Setiap
komponen disambungkan secara fisik dengan kabel atau jalur tembaga dengan istilah
“hardwaired” sehingga untuk merubah rangkaian maka sambungan-sambungan itu
harus diputuskan dan disambung kembali. Dengan hadirnya teknologi digital
microprocessor fungsi yang sebelumnya dilakukan dengan hard wired digantikan
dengan program-program software. Ini adalah sebuah revolusi proses didalam
prototyping, software lebih mudah dibandingkan hardware. Dengan beberapa
penekanan tombol kita dapat merubah logika alat secara radikal dan mencoba versi
kedua, ketiga, dan seterusnya dengan cepat tanpa harus mengubah pengkabelan dari
rangkaian.
Bahasa pemrograman dan Integrated Development Environment (IDE)Arduino
bersifat open source adalah sebuah software yang berperan untuk menulis program,
meng-compile, menjadi kode biner dan mengupload ke dalam memory microkontroler.
Ada banyak projek dan alat-alat dikembangkan oleh akademis dan profesional dengan
menggunakan arduino, selain itu juga banyak modul-modul pendukung (sensor,
penggerak, tampilan dan sebagainya) yang dibuat pihak lain dan disambungkan dengan
arduino. Arduino berevolusi menjadi sebuah platform karena ia menjadi pilihan dan
acuan bagi banyak praktisi.
Gambar 2.21 Board Arduino UNO R3
(Sumber : Teknikelektronika.com)
BoardArduino UNO memiliki fitur-fitur baru sebagai berikut :
1. Pinout berfungsi : menambahkan SDA dan SCL pin yang dekat ke pin aref dan dua
pin baru lainnya ditempatkan dekat ke pin RESET, dengan I/O REF yang
35
memungkinkan sebagai buffer untuk beradaptasi dengan tegangan yang disediakan
dari board sistem. Pengembangannya, sistem akan lebih kompatibel dengan
prosesor yang menggunakan AVR, yang beroperasi dengan 5V dan dengan Arduino
karena beroperasi dengan 3,3V. Yang kedua adalah pin yang tidak terhubung, yang
disediakan untuk tujuan pengembangannya.
2. Sirkuit reset ATMega 16U2 ganti 8U yang digunakan sebagai konverter USB-to-
serial.
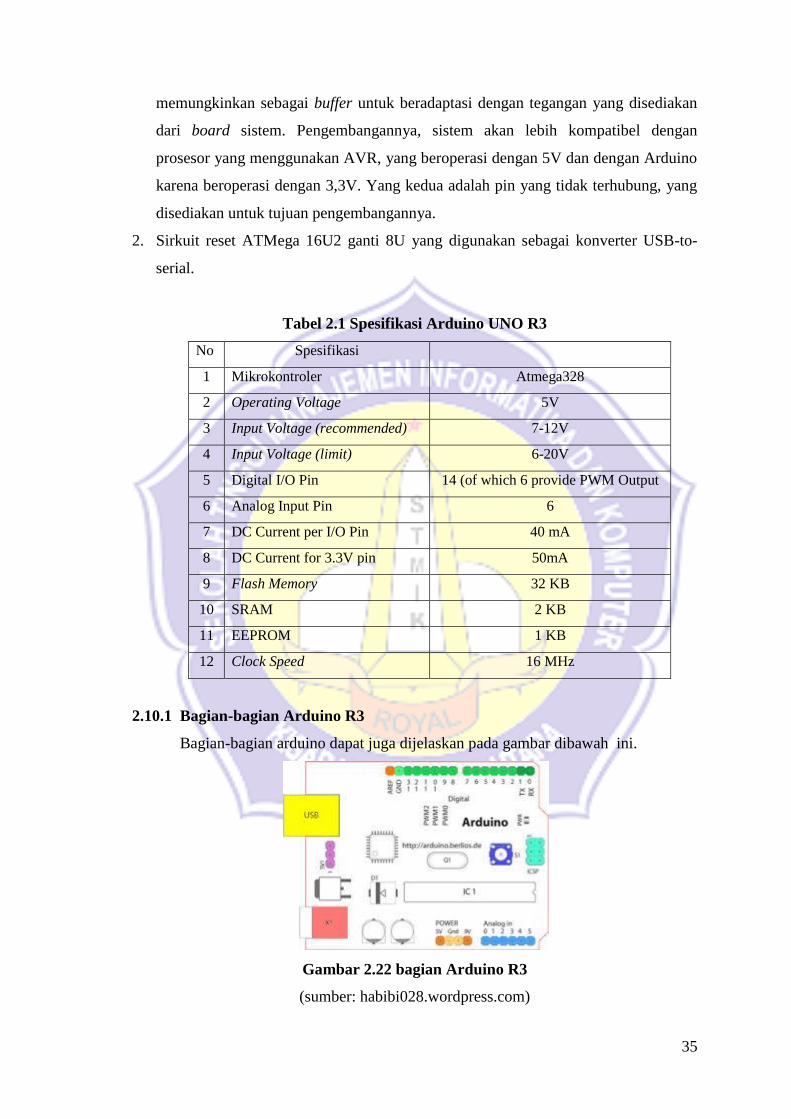
Tabel 2.1 Spesifikasi Arduino UNO R3
No Spesifikasi
1 Mikrokontroler Atmega328
2 Operating Voltage 5V
3 Input Voltage (recommended) 7-12V
4 Input Voltage (limit) 6-20V
5 Digital I/O Pin 14 (of which 6 provide PWM Output
6 Analog Input Pin 6
7 DC Current per I/O Pin 40 mA
8 DC Current for 3.3V pin 50mA
9 Flash Memory 32 KB
10 SRAM 2 KB
11 EEPROM 1 KB
12 Clock Speed 16 MHz
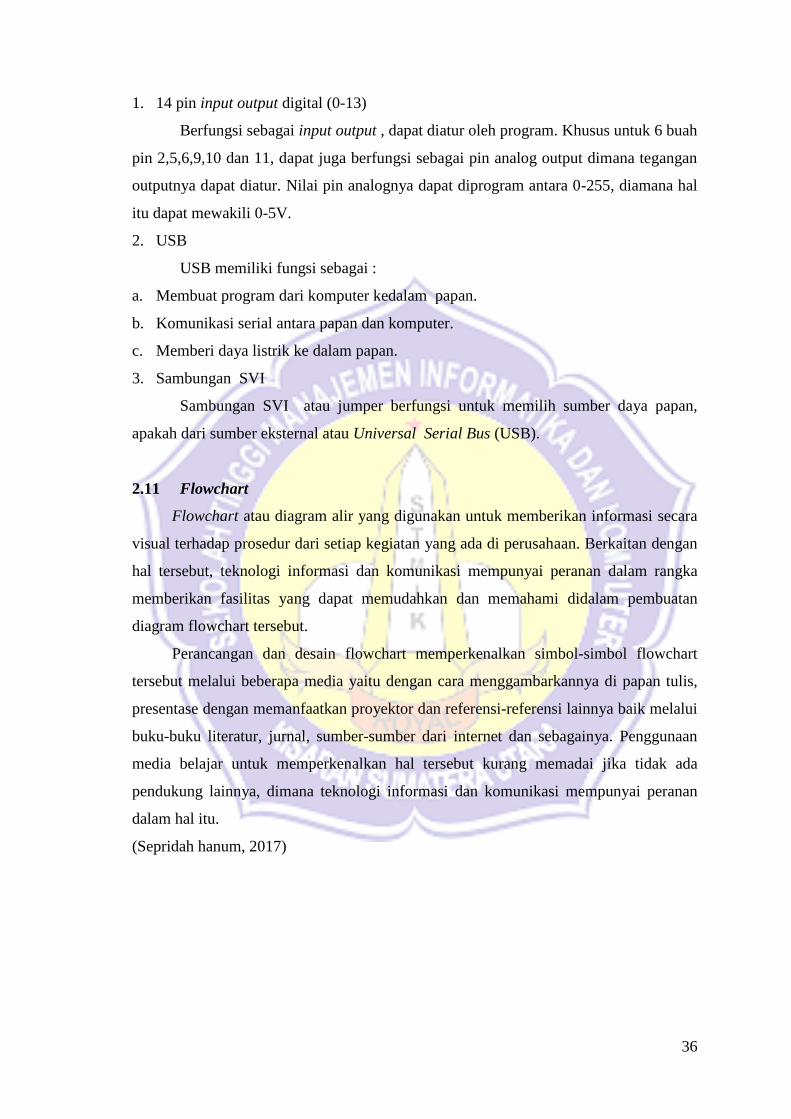
2.10.1 Bagian-bagian Arduino R3
Bagian-bagian arduino dapat juga dijelaskan pada gambar dibawah ini.
Gambar 2.22 bagian Arduino R3
(sumber: habibi028.wordpress.com)
36
1. 14 pin input output digital (0-13)
Berfungsi sebagai input output , dapat diatur oleh program. Khusus untuk 6 buah
pin 2,5,6,9,10 dan 11, dapat juga berfungsi sebagai pin analog output dimana tegangan
outputnya dapat diatur. Nilai pin analognya dapat diprogram antara 0-255, diamana hal
itu dapat mewakili 0-5V.
2. USB
USB memiliki fungsi sebagai :
a. Membuat program dari komputer kedalam papan.
b. Komunikasi serial antara papan dan komputer.
c. Memberi daya listrik ke dalam papan.
3. Sambungan SVI
Sambungan SVI atau jumper berfungsi untuk memilih sumber daya papan,
apakah dari sumber eksternal atau Universal Serial Bus (USB).
2.11 Flowchart
Flowchart atau diagram alir yang digunakan untuk memberikan informasi secara
visual terhadap prosedur dari setiap kegiatan yang ada di perusahaan. Berkaitan dengan
hal tersebut, teknologi informasi dan komunikasi mempunyai peranan dalam rangka
memberikan fasilitas yang dapat memudahkan dan memahami didalam pembuatan
diagram flowchart tersebut.
Perancangan dan desain flowchart memperkenalkan simbol-simbol flowchart
tersebut melalui beberapa media yaitu dengan cara menggambarkannya di papan tulis,
presentase dengan memanfaatkan proyektor dan referensi-referensi lainnya baik melalui
buku-buku literatur, jurnal, sumber-sumber dari internet dan sebagainya. Penggunaan
media belajar untuk memperkenalkan hal tersebut kurang memadai jika tidak ada
pendukung lainnya, dimana teknologi informasi dan komunikasi mempunyai peranan
dalam hal itu.
(Sepridah hanum, 2017)
37
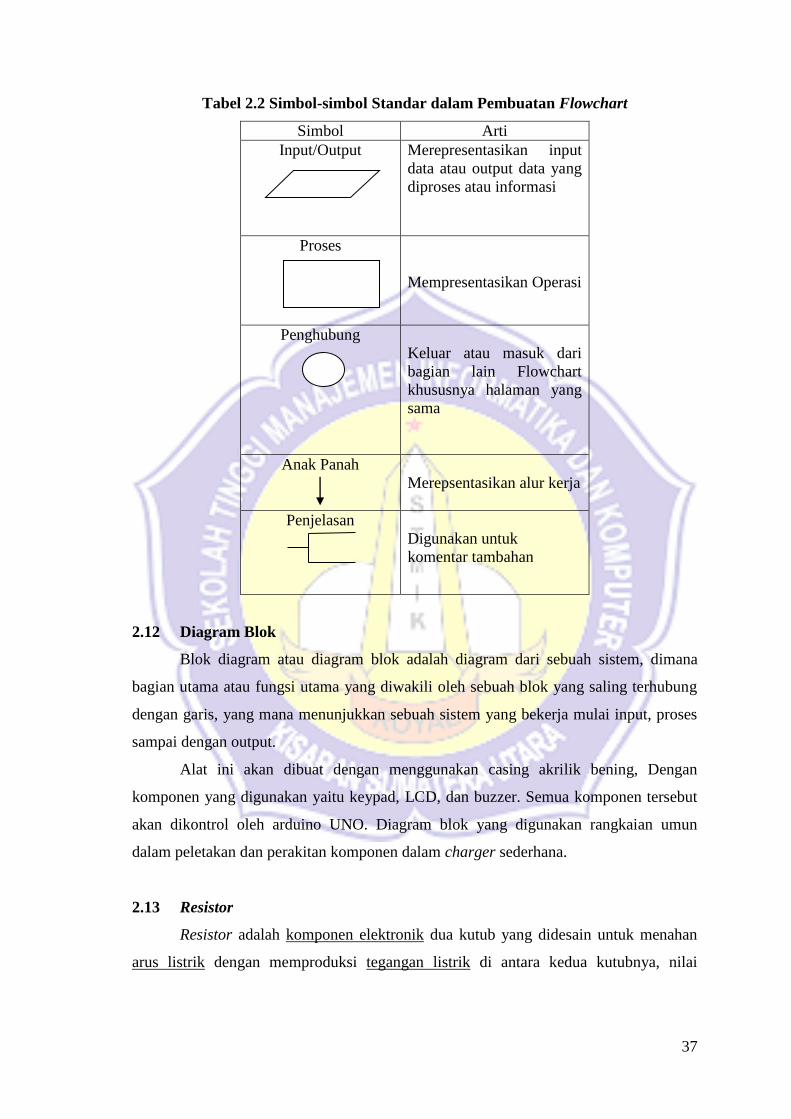
Tabel 2.2 Simbol-simbol Standar dalam Pembuatan Flowchart
Simbol Arti
Input/Output
Merepresentasikan input
data atau output data yang
diproses atau informasi
Proses
Mempresentasikan Operasi
Penghubung
Keluar atau masuk dari
bagian lain Flowchart
khususnya halaman yang
sama
Anak Panah
Merepsentasikan alur kerja
Penjelasan
Digunakan untuk
komentar tambahan
2.12 Diagram Blok
Blok diagram atau diagram blok adalah diagram dari sebuah sistem, dimana
bagian utama atau fungsi utama yang diwakili oleh sebuah blok yang saling terhubung
dengan garis, yang mana menunjukkan sebuah sistem yang bekerja mulai input, proses
sampai dengan output.
Alat ini akan dibuat dengan menggunakan casing akrilik bening, Dengan
komponen yang digunakan yaitu keypad, LCD, dan buzzer. Semua komponen tersebut
akan dikontrol oleh arduino UNO. Diagram blok yang digunakan rangkaian umun
dalam peletakan dan perakitan komponen dalam charger sederhana.
2.13 Resistor
Resistor adalah komponen elektronik dua kutub yang didesain untuk menahan
arus listrik dengan memproduksi tegangan listrik di antara kedua kutubnya, nilai
38
tegangan terhadap resistansi berbanding dengan arus yang mengalir, berdasarkan hukum
Ohm:
Resistor digunakan sebagai bagian dari jejaring elektronik dan sirkuit
elektronik, dan merupakan salah satu komponen yang paling sering digunakan. Resistor
dapat dibuat dari bermacam-macam komponen dan film, bahkan kawat resistansi (kawat
yang dibuat dari paduan resistivitas tinggi seperti nikel kromium).
Karakteristik utama dari resistor adalah resistansinya dan daya listrik yang
dapat dihantarkan. Karakteristik lain termasuk koefisien suhu, desah listrik, dan
induktansi.
Resistor dapat diintegrasikan kedalam sirkuit hibrida dan papan sirkuit cetak
bahkan sirkuit terpadu. Ukuran dan letak kaki bergantung pada desain sirkuit,
kebutuhan daya resistor harus cukup dan disesuaikan dengan kebutuhan arus rangkaian
agar tidak terbakar.
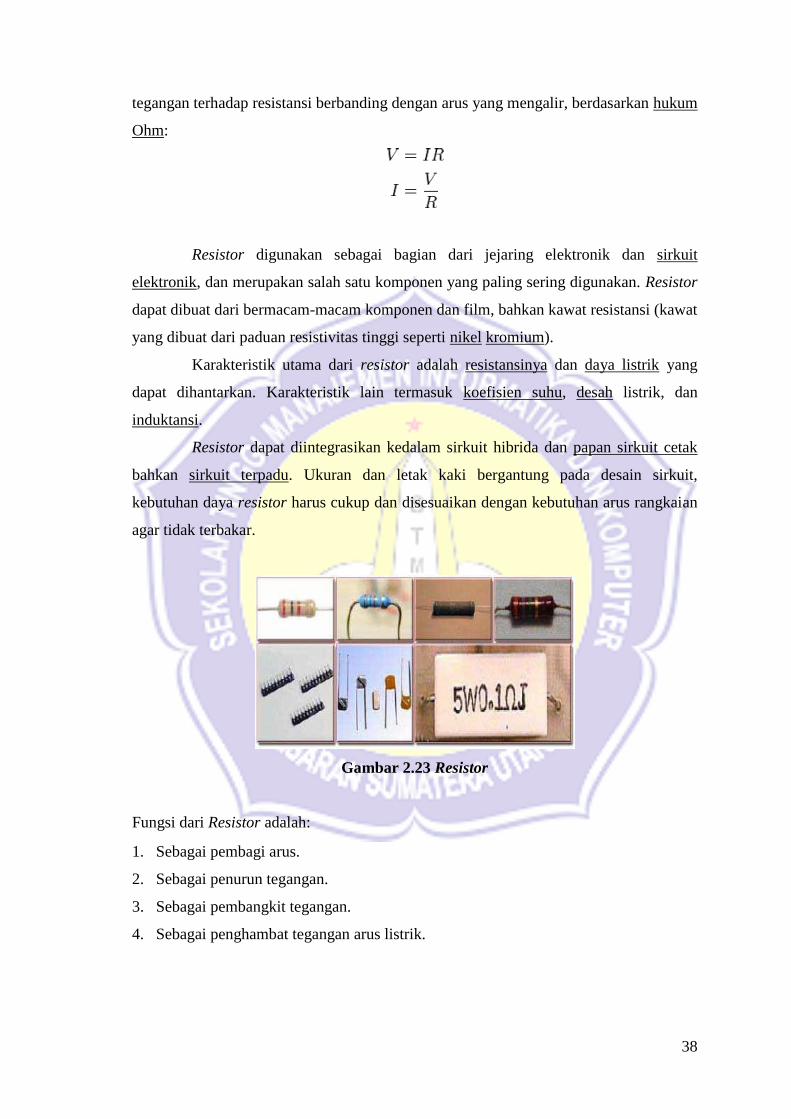
Gambar 2.23 Resistor
Fungsi dari Resistor adalah:
1. Sebagai pembagi arus.
2. Sebagai penurun tegangan.
3. Sebagai pembangkit tegangan.
4. Sebagai penghambat tegangan arus listrik.

39




















