






Bahasa
Halaman
Hukum


1TYPES OF MATCHMOVES ANDTHEIR USES
What Does a Typical Matchmove Task LookLike in the First Place?
Before we go any further, you’d probably like a basic under-standing of what exactly goes on in the matchmoving process,right? You saw a very basic illustration of the CG environmentin the introduction, but how does all that information get intothe computer, and then what the heck do you do with it?
In the very big scheme of things, the matchmoving processgoes like this:• Planning• Gathering data on set• Building assets• Reviewing data• Attacking the shot• Passing the shot on to other artists
We’ll also look at:• How the computer thinks about all of this stuff
PlanningThe first step in the ideal matchmove process is planning, well
before any filming ever occurs. The matchmover going to set willread the script, look at concept art and preproduction digital tests(called “Look Dev”), and generally familiarize him- or herselfwith the information needed to recreate the locations, props, andcameras in the CG environment back at the office after filming.With a plan in hand, the matchmover goes to location.
Show
Any productionyou might workon. Though mostpeople think of a
show as a television show,“show” can refer to a film,TV show, commercial, orany other project. “Whatshow are you on?” is atypical question.
Look Dev
LookDevelopment. Atthe beginning ofthe show,
various departments worktogether with the director todetermine the look of theeffects in the film.
Sup
(pronounced“supe”)Supervisor.
Lead
The first rung ofthe sup ladder, aLead is incharge of his or
her department on aparticular show, forexample, Matchmove Leadfor “Awesome Movie III.”
1© 2010 Elsevier Inc. All rights reserved.DOI: 10.1016/B978-0-240-81230-4.00001-4

Gathering DataOn location, a variety of tools, from a simple sketchbook and
measuring tape to advanced equipment like laser-equipped sur-vey heads and LIDAR, are used to survey the location so that itcan be recreated in the CG environment later on. The on-setteam takes detailed measurements of the location or set, thebuildings, furniture, trees, landscape features, light poles, chairs,cars, dishes, carpets � basically, anything that can be measuredand holds still long enough to be measured, the on-set match-move team will try to measure or otherwise document its shape,size, and any distinguishing details that might help in cameratracking back at the office, just as any site surveyor would.They’ll try to photograph everything possible on location forreference later. They’ll record details about the camera for everytake � the lens, the focal length, the focus distance, distance tosubject, height, tilt, roll, and anything else that can possibly bewritten down in the time there is. Basically, they try to get anyand all information necessary to build a replica of the real-life
Figure 1-1 Shooting on set.
Survey Head
Device used byengineers andVFX artists tolocate a
designated point in 3Dspace. The device utilizes alaser to “ping” a point inspace (for example, theedge of a building on set)and calculates its positionusing polar coordinates.These 3D locations canthen be used to buildaccurate CG models of theset or location. Whichfeatures of the location areimportant enough to bepinged is determined bythe operator who can thenselect specific survey pointsmost pertinent to thematchmove process.
LIDAR (Light DetectionAnd Ranging)
An automatedversion of asurvey head thatscans its entire
environment using a laser,returning many more 3Dlocations than a singleoperator with a surveyhead. Produces much moredetailed representations of aset or location, but the resultis often too heavy to workwith without modification.
3D Body Scan
A method usedto create virtualmodels of actualpeople, using
lasers to scan minute detailsof the person’s form, whichis later used to create avirtual double for him or her.
2 Chapter 1 TYPES OF MATCHMOVES AND THEIR USES

set in the computer back at the office. The more detailrecorded, the better.
At the same time, if the effects in the show require this levelof detail, the actors are being scanned in 3D so that the showwill have accurate character models to work with in the CGenvironment.
Building AssetsWhen the on-set team gets back to the office, all the infor-
mation, measurements, survey data, LIDAR data, photographs,
Figure 1-2 Detailed survey sketch from set.
CG Environment
The computergraphicsenvironment.The world as
represented in thecomputer, interacted withthrough various types ofsoftware and representedin various ways. If you’veever seen a “Making of”featurette or TV show aboutvisual effects and watchedsomeone working on acomputer, you’ve seen thevirtual CG world!
Digital Models
Representationsof people,places, andthings in the CG
environment.
Modeling Department
The artistsresponsible forcreating thegeometry
representing the actors,props, buildings, sets,locations, and whatever elseis needed in the CGenvironment.
Rigging Department
The artistsresponsible fortaking thegeometry, or
“skin,” of a charactercreated by the modelingdepartment and binding itto a skeleton-like structurefor use in animating thatcharacter.
Figure 1-3 The virtual set created from information brought back by the matchmove team.
Chapter 1 TYPES OF MATCHMOVES AND THEIR USES 3

and other notes are assembled and disseminated to the rest ofthe facility. The modeling department creates digital models ofthe sets, locations, and characters. The character models aregiven animatable skeletons by the rigging department. Notes,camera details, photos, and anything else brought back fromlocation are organized and made available by production staff.Then the fun starts!
Attacking the ShotThis is the beginning of the actual digital portion of match-
moving. Notice how much work is done before any matchmove-specific software is even touched!
After reviewing all the data from set, the matchmover createsa virtual camera based on this data. Part of this virtual camerais called the image plane, which is like a movie screen. It’sattached to the virtual camera and moves with it at all times.The image on the virtual “movie screen” is called the plate, andshows the images taken on set � the actual film that was shotand scanned to be manipulated in the digital environment. Inthis way, when the matchmover looks through the virtual cam-era view, he or she sees what the camera operator saw on set(Figure 1-5).
The matchmover matches the focal length of the lens, andpositions the camera in the same place in relation to the virtualset as it was in real life on the day of the shoot. Now, whenlooking through the virtual camera, the virtual set will line up
Figure 1-4 The virtual camera has a “movie screen,” or image plane, attached to it,and displays the film actually taken on set. The camera can be maneuvered around thevirtual set just as the real-life camera is moved around the real-life set.
Character Models
Digital modelsused specificallyto animatepeople and other
characters. These are set upby the riggers to be animatedwith an articulated digitalskeleton.
Skeleton
An articulatedstructure createdmimicking thebones and joints
of a human or othercreature and attached to avirtual “skin,” allowing it tobe animated the wayhumans and othercreatures move.
Prop
Short for“property.” Onset, props areanything actors
can easily move aroundand interact with. These areusually then recreated inthe CG environment by themodeling department,though occasionally amatchmover creates his orher own props.
Practical
The real-lifeprop, makeupeffect, specialeffect, or other
on-set, live-action element tobe duplicated or extended inCG. If it’s in the plate, it’s apractical. I’ve been knownto accidentally refer to anactor or two as “thepractical guy” on a fewoccasions!
4 Chapter 1 TYPES OF MATCHMOVES AND THEIR USES

with the plate. The better the virtual set lines up with the plate,the better it’s said to “fit.”
At this point, the matchmover will turn to some automatedsoftware. If the camera on set did not move (called a “lockoffshot”), then the matchmover won’t have to worry about animat-ing the camera. However, the matchmover will want to get amore accurate fit, or camera solution, than what he or she canget just by eye. This is where matchmoving specific softwarecomes in.
What the Computer Thinks AboutHow does this mysterious software work? Well, on the sur-
face, it’s actually pretty simple. You give the software someinformation, it chugs through some equations using the vari-ables you’ve provided, and it spits out a solution. This solutionis only as good as the information you give the software, ofcourse!
So What Are the Variables You Feed the Camera?
You tell the software:• That certain spots on the plate are important• That they are important because they match certain points
in the virtual set
Figure 1-5 Looking through the virtual camera. The matchmover can see both theplate and the virtual set in this view and judge the alignment. This camera solution is avery good fit.
Production Staff
The ProductionStaff is theorganizationalstructure behind
the creative activity on ashow. From overallscheduling, budgeting, andcommunication with thestudio, to assistingsupervisors, coordinatingdailies notes, to makingsure the snack drawers arefilled � the production staffdoes it all! You definitelywant to be friends withthem. Though “production”refers both to the producersof the overall project, aswell as the in-houseproducers at your VFXfacility, in the context of thisbook, Production andProduction Staff alwaysrefer to the VFX productionside of the overall showproduction, unlessotherwise specified.
TIP: What’s thedifference betweenSpecial Effects andVisual Effects?
Special Effectsinclude anythingand everything
done on set � rain, pyro,makeup effects, pneumaticdinosaurs, practical octopusarms, car crashes, burninghouses, or any otherpractical effect you can thinkof. If it happens on set, it’sSpecial Effects. Visual Effectsis strictly postproduction,manipulating the live actionfilm after photography. If ithappens to the film, afterphotography, it’s VisualEffects!
Chapter 1 TYPES OF MATCHMOVES AND THEIR USES 5

• That those points in the virtual set are located at these spe-cific coordinates
Okay, but How Is That Done?
First, the important features on the plate are marked for thesoftware by a process called 2D tracking. The 2D tracking soft-ware tells the computer where these features are on every frameof the sequence, in 2D (flat) space.
Matchmove-/Camera-Tracking-SpecificSoftware
There arecurrently manysoftwarepackages
available on the marketwritten specifically forcamera tracking. Eachhave varying levels ofautomation andopportunities for artistintervention, and each hasbenefits and drawbacks. Inaddition, many facilitieshave written their ownsoftware (called“proprietary” software) formatchmoving. So althoughit’s useful to be familiarwith a popular package ortwo, it’s much moreimportant to know how toactually matchmove thanhow to work a specificsoftware package � younever know what you’ll beusing from one day to thenext! With that in mind, inthis book, I try to remain assoftware-neutral aspossible.
Virtual Camera
A representationof a physicalcamera in theCG
environment. Also calledCG camera, 3D camera,or, in a matchmove context,just “the camera.”
Figure 1-6 2D tracking: important features are tracked with special 2D software.
Figure 1-7 2D track points on the plate (white) are associated with 3D locators (aqua)on the virtual set (dark blue).
6 Chapter 1 TYPES OF MATCHMOVES AND THEIR USES

Once all the important features have been tracked on the 2Dplate, the matchmover identifies the corresponding 3D loca-tions of those points on the virtual set, using 3D elements calledlocators. The software computes the correspondence over time,and this correlation between 2D tracking points and 3D locatorsis the basis of the 3D camera solution created by the match-move software.
How do those numbers get crunched exactly? Well, I’m notactually a programmer, but I can tell you what the software is“thinking” about.
Imagine holding a string from the film plane of the virtualcamera, and stretching it to one of the features on your plate.Remember, your camera and plate are locked to each other �they only move together. If you rotate your camera, the platerotates out there in space. If you move back and forth, so doesthe image plane.
Now imagine that you have a few strings stretching from yourcamera to your plate � let’s say four (Figure 1-9). Imagine thatyou move your virtual camera around so that those strings alsotouch the 3D locators associated with those 2D features. Your
Image Plane
A virtual planeattached to theCG camera,with the plate
image displayed on it, likea movie screen. As thecamera moves in 3Dspace, the image planestays aligned with it (seeFigure 1-4).
Plate
The originalscanned filmshot on set to bemanipulated in
the VFX process (see thesection “Why Is It Called aPlate, Anyway?” inChapter 2).
Camera View
A windowshown in the CGenvironmentrepresenting
what a cameraman wouldsee looking through the CGcamera (see Figure 1-5).
Focal Length
The distancefrom the lens ofa camera to thefilm plane,
usually given in millimeters(a 50mm lens, forexample, is a commonfocal length). See “Parts ofthe Film Camera and HowThey Work” in Chapter 2for more details.
Figure 1-8 The “strings” (white) stretch from the camera to the 2D track points onthe plate; in between, they also touch the 3D locators in the virtual set (white crosses)that are associated with the 2D track points (pink crosses), triangulating the position ofthe virtual camera by correlating the known measurements on the plate with thecorresponding points on the virtual set. These known measurements were surveyed andrecorded by the on-set matchmove team during the original shoot.
Chapter 1 TYPES OF MATCHMOVES AND THEIR USES 7

camera would line up with the virtual set and the plate perfectly,and there is only one place your virtual camera could be for all ofthe strings to touch all of the correct 3D locators at the same time,right? Now, say you did that on every frame of the shot. That’sexactly what the matchmove software does � for every 2D posi-tion on a plate and every associated 3D locator in the virtual set,the software “stretches a string” from the camera through the vir-tual location and to the plate, maneuvering the virtual camerauntil all the strings line up correctly. The technical term for this istriangulation, which means positioning the virtual camera by cor-relating the known measurements on the plate and virtual set.These known measurements were the ones surveyed andrecorded by the on-set matchmove team during the original shoot.
Essentially, you’re telling the software, “Software, this bath-room tile here on the plate is right here on my model. This oneright here is here on my model. This green box is right here onmy model. I know how wide these tiles are, and how big thebox is, so you can figure out the rest. Match it up � I’m goingfor coffee.”
Sometimes it works out smashingly, sometimes not (in otherwords, you’ll have to do some work!). But that’s the gist of it.
So, let’s look at what kinds of applications there are for thiskind of computerthink.
What Kinds of Matchmove Tasks Are There?Hopefully, that gives you a basic idea of what goes on in the
office on a day-to-day basis. Matchmove isn’t just an automated-button-push-and-it’s-done-thing � it’s very hands-on and can bedemanding! It’s also very challenging, and can be very entertain-ing as well. I promise.
There isn’t just one type of matchmove � the term actuallycomprises a few different functions. Let’s look at a few of these.
Camera TrackingThe most common type of matchmove is a camera track. In
a camera track, you will create a duplicate of the live actioncamera in the virtual 3D world. This camera will have the sameproperties as the camera on the set, including film back, lens,height, tilt, and any movement the camera may have per-formed. You will typically (but not always) get information fromthe set, and you will use all this information, plus any otherdata you can gather, to help you place and animate the CGcamera to match the live action camera.
Consider this example, in which the actor’s head and handswill be replaced with a flaming skeleton:
Film Plane
The physicallocation of thefilm beingexposed to light
inside a motion picturecamera.
Camera Solution
The term usedfor the result ofany automated3D camera
process. Also called asolve. “The solve is greatup to frame 54, and then itgoes all wonky.”
Fit
The degree towhich the virtualset lines up withthe plate. There
is never only one correctsolution for any givencamera in any given shot,but some solutions producea result in which the virtualset seems to “fit” betterwith the plate than others.Fit depends on manyfactors, including referencepoints fed to the software,accuracy of onset datagathering, accuracy of2D track points, and,sometimes, humidity, dayof the week, and yourhoroscope.
Lockoff Shot
A shot in whichthe camera isfixed on a mountand is not
allowed to move.
8 Chapter 1 TYPES OF MATCHMOVES AND THEIR USES
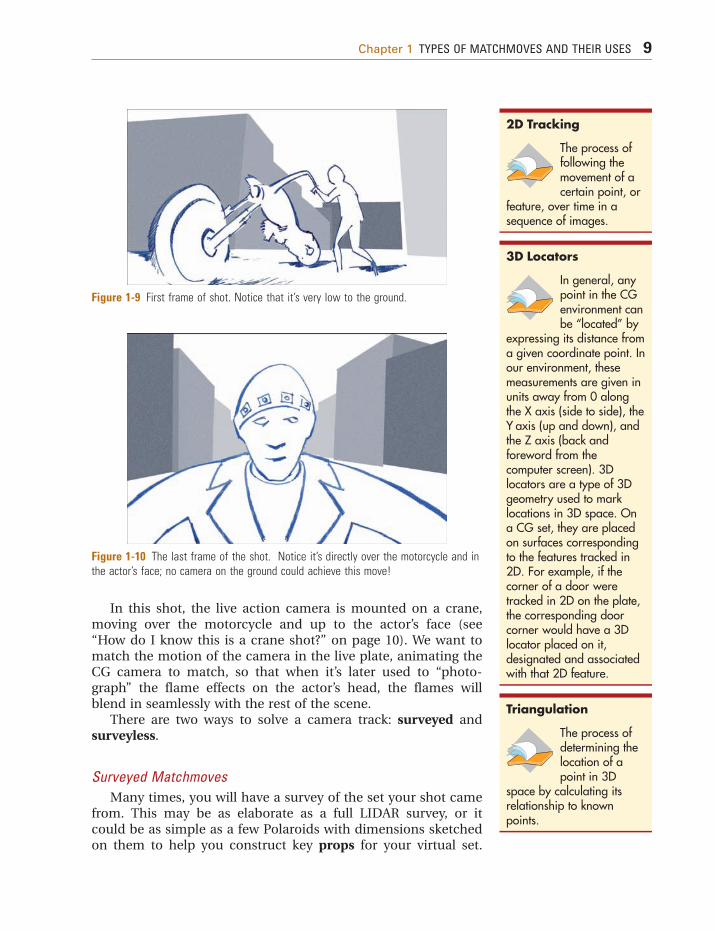
In this shot, the live action camera is mounted on a crane,moving over the motorcycle and up to the actor’s face (see“How do I know this is a crane shot?” on page 10). We want tomatch the motion of the camera in the live plate, animating theCG camera to match, so that when it’s later used to “photo-graph” the flame effects on the actor’s head, the flames willblend in seamlessly with the rest of the scene.
There are two ways to solve a camera track: surveyed andsurveyless.
Surveyed Matchmoves
Many times, you will have a survey of the set your shot camefrom. This may be as elaborate as a full LIDAR survey, or itcould be as simple as a few Polaroids with dimensions sketchedon them to help you construct key props for your virtual set.
2D Tracking
The process offollowing themovement of acertain point, or
feature, over time in asequence of images.
3D Locators
In general, anypoint in the CGenvironment canbe “located” by
expressing its distance froma given coordinate point. Inour environment, thesemeasurements are given inunits away from 0 alongthe X axis (side to side), theY axis (up and down), andthe Z axis (back andforeword from thecomputer screen). 3Dlocators are a type of 3Dgeometry used to marklocations in 3D space. Ona CG set, they are placedon surfaces correspondingto the features tracked in2D. For example, if thecorner of a door weretracked in 2D on the plate,the corresponding doorcorner would have a 3Dlocator placed on it,designated and associatedwith that 2D feature.
Triangulation
The process ofdetermining thelocation of apoint in 3D
space by calculating itsrelationship to knownpoints.
Figure 1-10 The last frame of the shot. Notice it’s directly over the motorcycle and inthe actor’s face; no camera on the ground could achieve this move!
Figure 1-9 First frame of shot. Notice that it’s very low to the ground.
Chapter 1 TYPES OF MATCHMOVES AND THEIR USES 9

Set data will also include the type of camera used (35mm filmcamera or HD video camera, for example), as well as informa-tion about the lens used, and hopefully some information aboutthe height and tilt of the lens at the beginning and end of theshot. These are normally estimates, but can be very useful asboth a starting point and in determining whether your shot isworking later on.
After gathering your data, you will then create 2D tracks cor-responding to points on your virtual set. In the previous craneshot example, for instance, you might track features on themotorcycle and in the background (assuming that you have amodel for those). Then you link the 2D data to the correspond-ing points on the virtual 3D set, and let the solver do its thing.
Surveyless Matchmoves
Occasionally, you may get a shot with no survey data, or nocamera data, or no data at all; you will have to create a surveylesssolution in this case. It’s virtually impossible, these days, to haveabsolutely no information at all, because of all the informationat our fingertips online; see Chapter 3 to learn how to glean cluesfrom your shot in order to create a virtual set.
Sometimes, though, even your best efforts at set building won’twork out; then you will try the surveyless method. In this method,automated software uses mathematical algorithms to pick hun-dreds of 2D points to track (versus the six or so you might need for
a simple surveyed track), andthen analyzes the motion ofthose points to create a cameramove and a point cloud thatapproximates the 3D locationsof those tracked points, inessence building a rudimentaryset for you.
Instead of having known2D and 3D locator values as in asurveyed matchmove, the auto-mated matchmove softwaretracks hundreds of 2D pointsand analyzes the motion ofthese points in comparison toeach other. When it recognizesthat one large group of 2D trackpoints moves together, the soft-ware presumes that grouprepresents one 3D element inthe virtual CG world. As the
TIP: How do I Knowthis is a Crane Shot?
I have a few clues.First and foremost,the camera report
mentions the crane. Also,there were some photosfrom set where it wasvisible. But mostly, I can tellfrom watching the shotitself. It starts out really low,moves directly over thebike, and ends up right inthe actor’s face � that kindof motion can’t beaccomplished with acamera on the ground.Being able to imaginecamera setup scenarios is a
Figure 1-11 The software trackshundreds of 2D featuresautomatically.
10 Chapter 1 TYPES OF MATCHMOVES AND THEIR USES

software goes through each frame in the sequence, detecting thesegroups of points representing single objects, it also compares themotion of those objects to each other, looking for parallax, rota-tion, and translation cues through mathematical equations. Then,after that analysis, it generates a point cloud, the actual 3D loca-tors generated by the analysis of the comparative motion of the2D tracks. Think of it as hundreds of tiny locators that have beenprojected onto the plate, and then pushed out to reveal the 3Dshape of the actual objects that were photographed, not unlikethose boxes with the silver pins you push forward to reveal the 3Dshape of your hand.
A fully automated solution like this is usually, but not alwaysmy last resort, though I know many artists who use automatedsolutions as the first step in their personal process with greatsuccess. I often find that surveyless solutions aren’t worth thetrouble, especially if you can create a rudimentary set to workwith yourself. I’ve even been told by sups to spend no morethan two hours on a surveyless solution, because if an auto-mated solver can’t get the shot done in that time, it probablywon’t ever get it.
Film Back
The dimensionsof the imagebeing capturedon film. Also
called the aperture. Thesedimensions are derivedfrom the actual opening inthe plate through which thefilm is exposed to lightbehind the lens in a motionpicture camera. See “Partsof the Film Camera andHow They Work” inChapter 2 for more details.
Survey
(1) To physicallymeasure andrecord thefeatures and
dimensions of a particularsite, whether with a tapemeasure and notebook ormore sophisticated toolslike LIDAR or a laser surveyhead. (2) The data setresulting from that activity.(3) The CG model thatresults from the data fromset.
Point Cloud
CG virtual setmade up ofmany 3Dlocators
representing a surface orlocation, so called becausethey can be very dense andlook like clouds seen fromabove. See Figure 1-12.
Figure 1-12 A point cloud is generated after software analyzes the movement of2D tracks.
Chapter 1 TYPES OF MATCHMOVES AND THEIR USES 11
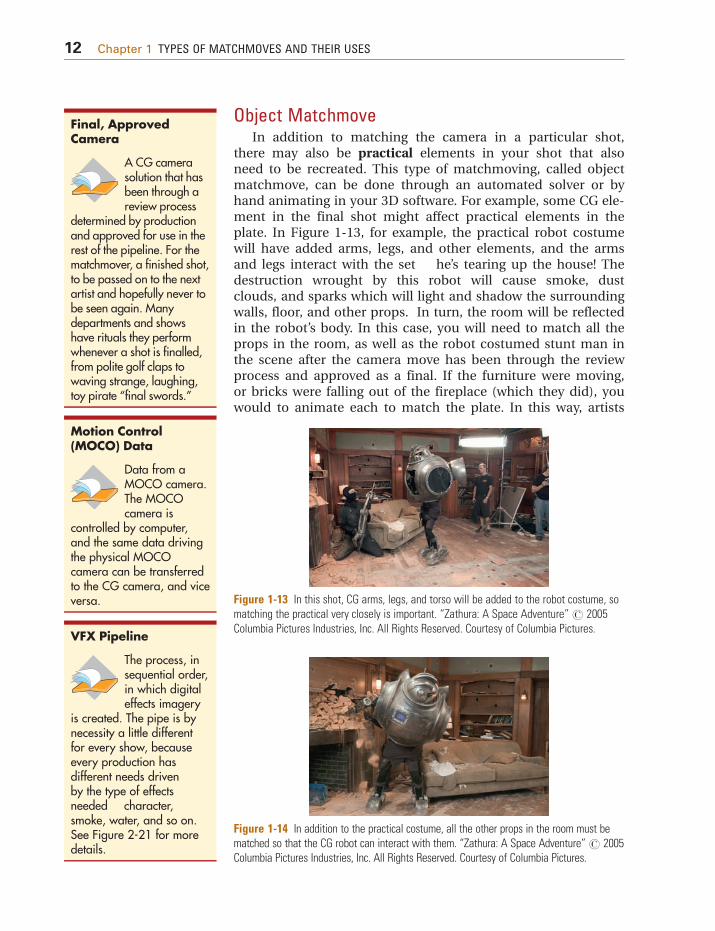
Object MatchmoveIn addition to matching the camera in a particular shot,
there may also be practical elements in your shot that alsoneed to be recreated. This type of matchmoving, called objectmatchmove, can be done through an automated solver or byhand animating in your 3D software. For example, some CG ele-ment in the final shot might affect practical elements in theplate. In Figure 1-13, for example, the practical robot costumewill have added arms, legs, and other elements, and the armsand legs interact with the set � he’s tearing up the house! Thedestruction wrought by this robot will cause smoke, dustclouds, and sparks which will light and shadow the surroundingwalls, floor, and other props. In turn, the room will be reflectedin the robot’s body. In this case, you will need to match all theprops in the room, as well as the robot costumed stunt man inthe scene after the camera move has been through the reviewprocess and approved as a final. If the furniture were moving,or bricks were falling out of the fireplace (which they did), youwould to animate each to match the plate. In this way, artists
Final, ApprovedCamera
A CG camerasolution that hasbeen through areview process
determined by productionand approved for use in therest of the pipeline. For thematchmover, a finished shot,to be passed on to the nextartist and hopefully never tobe seen again. Manydepartments and showshave rituals they performwhenever a shot is finalled,from polite golf claps towaving strange, laughing,toy pirate “final swords.”
Motion Control(MOCO) Data
Data from aMOCO camera.The MOCOcamera is
controlled by computer,and the same data drivingthe physical MOCOcamera can be transferredto the CG camera, and viceversa.
VFX Pipeline
The process, insequential order,in which digitaleffects imagery
is created. The pipe is bynecessity a little differentfor every show, becauseevery production hasdifferent needs drivenby the type of effectsneeded � character,smoke, water, and so on.See Figure 2-21 for moredetails.
Figure 1-13 In this shot, CG arms, legs, and torso will be added to the robot costume, somatching the practical very closely is important. “Zathura: A Space Adventure”r 2005Columbia Pictures Industries, Inc. All Rights Reserved. Courtesy of Columbia Pictures.
Figure 1-14 In addition to the practical costume, all the other props in the room must bematched so that the CG robot can interact with them. “Zathura: A Space Adventure”r 2005Columbia Pictures Industries, Inc. All Rights Reserved. Courtesy of Columbia Pictures.
12 Chapter 1 TYPES OF MATCHMOVES AND THEIR USES

further along the pipeline will know how thesmoke, dust, and robot interact with the practicalelements when seen in the virtual world. SeeChapter 12, “Real Life Shot: Character and ObjectRotomation,” for more details.
Character MatchmoveCharacter matchmove � which I refer to as
rotomation � is, as you might guess, in the samefamily as object matchmove. Take Figures 1-15and 1-16, for example. Once the camera match-move has been approved, the matchmove artistwould then import a CG character prepared by themodeling and rigging departments, and animate it to matchGeena Davis’ movements. Then this animated character ispassed to other departments down the line, so that Margalo hasa place to sit. The character animators will be able to timeMargalo’s movements with Geena’s hand motion just as if shewere a real bird on a real finger. In addition, both Stuart andMargalo need to know where to look when talkingto mom, so Geena’s face must be matched as well.
Some matchmovers are daunted by characteranimation, but you shouldn’t be; I will outlinemany tricks and procedures later so that charac-ter matching will be your favorite task! SeeChapter 10 for more details.
Other UsesSometimes, especially at the beginning of a
show, you might need to perform other match-move tasks in advance of primary photography.That sounds backward, right? Not necessarily.
Sometimes matchmoves are used to outputmotion control data in order to line up an exist-ing plate element with elements that have yet to be shot. Forexample, one might get a shot of a miniature set with pyro-technic effects, match the camera used for that element, andoutput that camera information so that the actors can befilmed separately with a motion control camera that mimicsthe camera used in the miniature set. This way the actors canbe integrated into the miniature background seamlessly, withthe same perspective and camera move.
Preliminary matchmoves can also be used to pass informa-tion on to other departments. For example, a sweeping, 360-degree camera move on a set which needs to be digitallyextended might be roughly matched so that the modeling
Figure 1-15 In order to interactwith Margalo, Geena Davis’hands and face must be matched.“Stuart Little 2” r 2002Columbia Pictures Industries, Inc.All Rights Reserved. Courtesy ofColumbia Pictures.
Figure 1-16 Here, the cat bedneeds to be matched for Stuart’sinteraction with the fabric; GeenaDavis’ hands and face arematched so that Margalo has aplace to sit, and Stuart andMargalo (and their animators)know where to look when they’retalking! “Stuart Little 2” r 2002Columbia Pictures Industries, Inc.All Rights Reserved. Courtesy ofColumbia Pictures.
Chapter 1 TYPES OF MATCHMOVES AND THEIR USES 13

department can see how much set extension will have to bebuilt. By matching the camera and then displaying the viewsseen in the shot, the modelers will have to build only as muchas the camera sees and no more, saving time and money thatcan then be spent elsewhere.
As you can see, many different tasks fall to the matchmovedepartment. The bulk of the work consists of camera match-ing, but there are also needs for object and character match-ing as well, and a single artist might be better at one taskthan another. Don’t worry though; I intend to give you a solidfoundation in each type of work—and also remember that avariety of talent is a good thing in any department, and agood supervisor will know how to “cast” each artist for shotsthey are more suited for.
What Kind of Matchmover Are You?Just as there is more than one kind of matchmove, there is
more than one kind of matchmover. What do I mean by “thereis more than one kind of matchmover?”
I have found, in my years of experience, that matchmoverstend to fall into one of two categories: the very analytical,mathematically-oriented matchmover, who trusts in whateversolver he or she is using and uses more logic than intuition toarrive at matchmove solutions. Then there is the matchmoverwho just sort of gets a feel for the camera, works with it, andmassages the solution around until it works.
There is no right or wrong type of matchmover to be; boththese types get the job done, and both are needed, as they aretypically well suited to different types of tasks. The more logical,mathematically-inclined matchmover is well suited for complexcamera moves and object matchmoves that need to be pixel-perfect; the more freewheeling matchmover is often well suitedto character matchmove, and situations with limited set data.Of course, if you are the only matchmover on a project, you’llneed to be a little bit of both!
I am much more of the second type of matchmover than thefirst � I don’t always trust software solutions; I’m not afraid todump a solution that’s not working and just start over. I’m alsogood at rotomation, which requires intuition and insight intohuman behavior more than theory. As you can see, it’s a benefitfor you to have at least some traits of both kinds of matchmovingpersonalities, so always keep an open mind, and find aspects toenjoy about each type of matchmove task!
BibliographyGoulekas, K. E. (2001). Visual Effects in a Digital World. San Diego, CA: Morgan
Kaufmann.
14 Chapter 1 TYPES OF MATCHMOVES AND THEIR USES
Copyright © 2022 FDOKUMEN

