







Bahasa
Halaman
Hukum


MARINHA DO BRASIL
CENTRO DE INSTRUÇÃO ALMIRANTE GRAÇA ARANHA
ESCOLA DE FORMAÇÃO DE OFICIAIS DA MARINHA MERCANTE-EFOMM
CURSO DE FORMAÇÃO DE OFICIAIS DE MÁQUINAS
KAROLINE CAMARGO ROCHA E
PEDRO RIBEIRO DE SOUZA PESSOA
SISTEMA DE GOVERNO: máquina do leme
RIO DE JANEIRO
2017
KAROLINE CAMARGO ROCHA E
PEDRO RIBEIRO DE SOUZA PESSOA
SISTEMA DE GOVERNO: máquina do leme
Trabalho de Conclusão de Curso apresentado como exigência para obtenção do título de Bacharel em Ciências Náuticas, especializado em Máquinas Marítimas do Curso de Formação de Oficiais de Máquinas da Marinha Mercante, ministrado pelo Centro de Instrução Almirante Graça Aranha.
Orientador: Prof. Nélio Fernandes Pereira
RIO DE JANEIRO
2017

KAROLINE CAMARGO ROCHA E
PEDRO RIBEIRO DE SOUZA PESSOA
SISTEMA DE GOVERNO – MÁQUINA DO LEME
Trabalho de Conclusão de Curso apresentado como exigência para obtenção do título de Bacharel em Ciências Náuticas, especializado em Máquinas Marítimas do Curso de Formação de Oficiais de Máquinas da Marinha Mercante, ministrado pelo Centro de Instrução Almirante Graça Aranha.
Data da Aprovação: ____/____/______
Orientador: Prof. Nélio Fernandes Pereira
___________________________________________________
Assinatura do Orientador
NOTA FINAL:____________

Dedicamos este trabalho aos nossos familiares que sempre nos
incentivaram e acreditaram no nosso sucesso, também dedicamos aos
nossos amigos por nos apoiarem na ausência de nossos familiares, se
tornando nossa segunda família.

AGRADECIMENTOS
Agradeço primeiramente a Deus, porque sem Ele seria impossível
traçar esse caminho e chegar onde chegamos.
Somos gratos aos nossos pais pelo apoio que sempre
demonstraram, educação que nos deram e por sempre acreditarem no
nosso sucesso.
Agradeço ao meu orientador e mestre Nélio, que estava sempre
disposto a nos auxiliar e por cativar nosso respeito e admiração como um
excelente profissional.
Agradecemos aos nossos amigos, sobretudo nossas parceiras,
pelo suporte e carinho que sempre nos deram.

“Entre as pequenas coisas que não fazemos e as grandes coisas que não podemos fazer, o perigo está em não tentarmos nenhum”. (Confúcio)

RESUMO
O desenvolvimento da máquina do leme foi de suma importância para a melhoria da
manobrabilidade, dos navios. O trabalho a seguir tem como objetivo discorrer sobre os
principais tipos de sistema de governo desde os primórdios da navegação até os modelos
mais mordemos, bem como ressaltar os tipos de transmissão que são utilizados para que
ocorra o bom e correto funcionamento de tal sistema. É notório que a monografia mostra
ainda as regras para construção e manutenção da máquina do leme baseando-se na
convenção solas (convecção para salvaguarda da vida humana no mar), elaborada pela
IMO (organização marítima internacional). o trabalho foi produzido através do método
quantitativo de pesquisa, uma vez que apoiou-se na coleta de informações e no
tratamento delas pelos autores deste trabalho de conclusão de curso. Pelos fatos
expostos nesta monografia vê-se que é primordial selarmos pela segurança da tripulação
seguindo as regras impostas pela IMO e que a modernização dos sistemas de governo
possibilitou um menor tempo de resposta entre o comando do timoneiro e a execução
pelo leme, o que possibilitou o aperfeiçoamento do controle do rumo a ser navegado,
impedir colisão, evitar perigos a navegação e principalmente a melhoria das manobras
de atracação e desatracação.
Palavras-chave: Leme. Máquina. Telemotor. Direção.
.

ABSTRACT
The development of the rudder machine was of utmost importance for improving the
maneuverability of ships. The following work is aimed at discussing the main types of
governance system from the beginning of navigation to the most biting models, as well as
highlighting the types of transmission that are used for proper and correct system
operation. It is notorious that the monograph also shows how rules for the construction
and maintenance of the rudder machine are based on the solos convention, elaborated
by IMO (international maritime organization). The work was produced using the
quantitative method of research as it relied on the collection of information and no
treatment for the authors of this course completion work. From the facts presented in this
monograph we see that it is essential to seal for the safety of the crew following the rules
imposed by the IMO and that a modernization of the systems of government made
possible a shorter response time between the command of the helmsman and the
execution by the reader, which made possible the Improvement of safety control, collision
safety, prevention of navigation danger and especially of attraction and deactivation
maneuvers.
Keywords: Rudder. Machine. Telemotor. Direction.

LISTA DE FIGURAS
Figura 1: Navio Great Eastern 11
Figura 2: Válvula Solenóide 14
Figura 3: Azimutal 15
Figura 4: Azipods 15
Figura 5: Painel de controle 16
Figura 6: Válvula de isolamento 18
Figura 7: Conjunto bomba e solenóide 19
Figura 8: Leme a mão 23
Figura 9: Servomotor a vapor 24
Figura 10: Simulador de um servomotor hidrelétrico 25
Figura 11: Controle elétrico de um telemotor 31
Figura 12: Conjunto bomba e válvula solenoide 34
Figura 13: Diagrama de blocos de um sistema de direção 35
Figura 14: Telemotor 38
Figura 15: Unidade de energia eletromecânica 40

SUMÁRIO
1 INTRODUÇÃO 11
2 GENERALIDADES 14
2.1 Direções: “follow-up” e “non-follow-up” 17
2.2 Válvulas de alivio, isolantes e de derivação 18
2.3 Interruptores de parada e limite 20
2.4 Engrenagens de mão e energia hidráulica 20
2.5 Carregamento 21
3 SISTEMAS DE GOVERNO 23
3.1 Leme a mão 23
3.2 Máquina do leme ou servomotor 24
3.3 Servomotor a vapor 24
3.4 Servomotor hidrelétrico 25
3.5 Servomotor elétrico 26
4 LEGISLAÇÃO 27
5 TRANSMISSÕES E TIPOS DE MÁQUINA DO LEME 30
5.1 Tipos de transmissão 30
5.2 Elementos exigidos pela SOLAS 32
5.3 Controle local e parâmetros 33
5.4 Sinais de uma tripulação treinada 34
6 FUNCIONAMENTO 35
6.1 Controles 35
6.1.1 montagem da direção 35
6.1.2 controle de eixo 36
6.1.3 telemotor hidráulico com by-pass do meio do navio 36
6.1.4 transmissor da haste do passadiço 36
6.1.5 telemotores tubo-bombas 38
6.2 Comando 39
6.2.1 piloto automático 39
6.2.2 unidade de energia eletromecânica 39
6.2.3 unidade de potência eletro hidráulica 40

7 TESTES EXIGIDOS 42
7.1 Teste no porto e antes da partida 42
7.2 Teste de mar 44
7.3 Broca de direção de emergência 44
7.4 Procedimentos de mudança elétrica, hidráulica e mecânica 45
8 CONSIDERAÇÕES FINAIS 46
REFERÊNCIAS

11
1 INTRODUÇÃO
Durante cerca de 50 anos após a introdução da propulsão a vapor, os navios
ainda estavam sendo guiados à mão. À medida que o tamanho e a velocidade
aumentaram, a necessidade de hélices, hélices principais giratórias e jatos de água.
Nada disso foi possível e melhores resultados foram alcançados com máquinas a
vapor ou hastes hidráulicas que operam em um leme. Estes primeiros mecanismos
foram iniciados e parados manualmente, a posição do controle sem referência à
posição do leme.
O problema tornou-se agudo com o Great Eastern – até então, o maior navio
ainda construído - como se achava impossível dirigir satisfatoriamente pelo poder
manual. Em 1867, um equipamento de governo a vapor equipado com uma arte de
caça projetada por J. McFarlane Gray - um membro fundador do Instituto de
Engenheiros Marítimos - foi instalado no Great Eastern. Pela primeira vez, isso deu
uma direção hidráulica que poderia ser controlada por um volante, operada de forma
semelhante ao equipamento de direção da roda do leme, mas sem "retrocesso" no
volante.
Figura 1 – Navio Great Eastern
Fonte: www.google.com.br/imagens

12
Durante muitos anos, as engrenagens de direção foram colocadas sobre ou
perto do passadiço. Isso ocorreu porque o movimento do volante foi transmitido ao
controle do motor através de rodas de eixo e havia um limite prático para a distância
através da qual este método de transmissão era efetivo. O motor de direção acionou
o leme por meio de hastes e correntes, estendendo-se ao longo do convés do tambor
de corrente do motor para o quadrante ou calha com chave para o estoque do leme.
O fracasso dessas engrenagens, particularmente na transmissão da haste e da
corrente, foi ao mesmo tempo bastante comum e isso finalmente levou em 1936 à
nomeação da Junta de Comércio de um Comitê de Inquérito sobre Giros de direção.
As conclusões deste Comitê chamaram a atenção para uma série de deficiências na
concepção, operação, manutenção e inspeção de aparelhos de direção. Isso levou à
adoção de padrões mais elevados e, portanto, a uma operação mais segura dos
navios em geral.
Em 1888, no entanto, A. Betts Brown patenteou um telemotor hidráulico que
forneceu a facilidade de um controle remoto fácil e isso levou à evolução de máquinas
como Wilson-Pirrie, Brown Steam Tiller e engrenagens hidráulicas que poderiam atuar
diretamente na casa do leme.
Até 1911, o poder de operar as engrenagens de direção era basicamente vapor, uma
vez que mesmo a direção hidráulica foi ativada pela pressão da água de um sistema
de rede hidráulica que também servia outros auxiliares como derricks, hoists etc., o
sistema sendo alimentado por uma bomba de vapor.
Em 1911, no entanto, os primeiros navios a motor foram construídos e, como o
vapor não estava disponível, a energia elétrica precisava ser usada. A disponibilidade
de bombas reversíveis de acidentes variáveis, na forma dos projetos Hele-Shaw e
Williams-Janney, permitiu que essas bombas fossem usadas em associação com
motores elétricos de corrente contínua com o objetivo de fornecer energia hidráulica
para a operação de engrenagens de direção. O controle do movimento da direção,
alcançado inteiramente pelo meio do curso das bombas. Esta combinação provou ser
eminentemente adequada para o propósito e ainda é muito favorável.
Sobre o tempo de introdução do dispositivo hidráulico de direção elétrica,
também foram introduzidas as engrenagens de direção elétricas diretas. Estes
consistiam em motores de parada, partida e inversão acoplados mecanicamente à
cabeça do leme, sendo o controle elétrico do passadiço.

13
A necessidade especial de navios menores, para que a roda do leme e a
direção hidráulica do passadiço fiquem satisfeitas por vários anos por uma roda do
leme combinada e uma engrenagem de corrente de vapor ou elétrica colocada na
ponte.
Cerca de 1930, introduziram-se engrenagens hidráulicas de roda do leme e energia
em que uma bomba de mão rotativa na ponte poderia ser usada para controlar a
direção hidráulica ou fornecer direção direta da roda do leme ao ser conectada aos
cilindros principais.
Um freio combinado do leme e do para-brisas foi patenteado por McGregor em
1935. O freio do leme era muito desejável no caso de engrenagens de direção da
corrente, pois em caso de falha na transmissão, o leme poderia ser rapidamente
controlado. Uma vantagem adicional era que o freio de palheta poderia ser convertido
em dispositivo de direção de emergência usando uma bomba manual. Este método
de controle da casa do leme foi desenvolvido posteriormente na engrenagem de
palheta rotativa atual.
O encaixe de um timoneiro automático tornou-se cada vez mais popular entre
as guerras e essas unidades agora são quase universalmente instaladas em navios
oceânicos, seja como alternativa ao controle manual por meio de um telemotor
hidráulico ou como a única unidade de controle. Neste último caso, o interruptor de
emergência sem controle para controle manual com o qual as unidades de timoneiros
automáticas são fornecidas é considerado o controle alternativo do passadiço e o
sistema elétrico associado a este controle manual é separado e adicional ao sistema
para o controle principal.

14
2 GENERALIDADES
De maneira simples e fácil podemos dizer que o sistema de governo tem como
objetivo controlar o rumo a ser navegado, impedir colisões, evitar perigos a navegação
e peça fundamental no processo de atracação e desatracação.
O sistema de governo, ou em inglês steering gear, basicamente pode ser composto
por um leme (na maioria das embarcações) ou não somado ao leme destacamos
ainda a presença do timão (roda do leme), sistema de transmissão, máquina do leme
e indicador de ângulo do leme. A máquina do leme por sua vez é responsável por
mover o leme de um bordo a outro.
A peça responsável por iniciar e parar o movimento do leme é a válvula
solenoide (ou de três vias, leme parado, leme a bombordo, leme a boreste).
Um dos solenoides recebe a ordem de ligar ou de desligar, através de um sistema
sincro (feedback), baseado no timão (localizado no passadiço). Essas solenoides
possuem além do acionamento a distância, possuem dispositivos de acionamento
manual. É obrigação de todo o tripulante conhecer esta válvula, pois caso o sistema
de transmissão a distância pare de funcionar por alguma falha ou sinistro, o primeiro
tripulante a chegar na casa de máquina deve entrar em contato com passadiço e
operar manualmente a válvula. Para realizar esta operação é muito simples basta que
o operador retire os fios da solenoide e pressionar a extremidade da válvula.
É notório que é responsabilidade do maquinista ir à casa do leme e realizar a
manutenção da máquina do leme em caso de alguma anormalidade no seu
funcionamento.
Figura 2 – Válvula Solenóide
Fonte: www.google.com.br/imagens
15
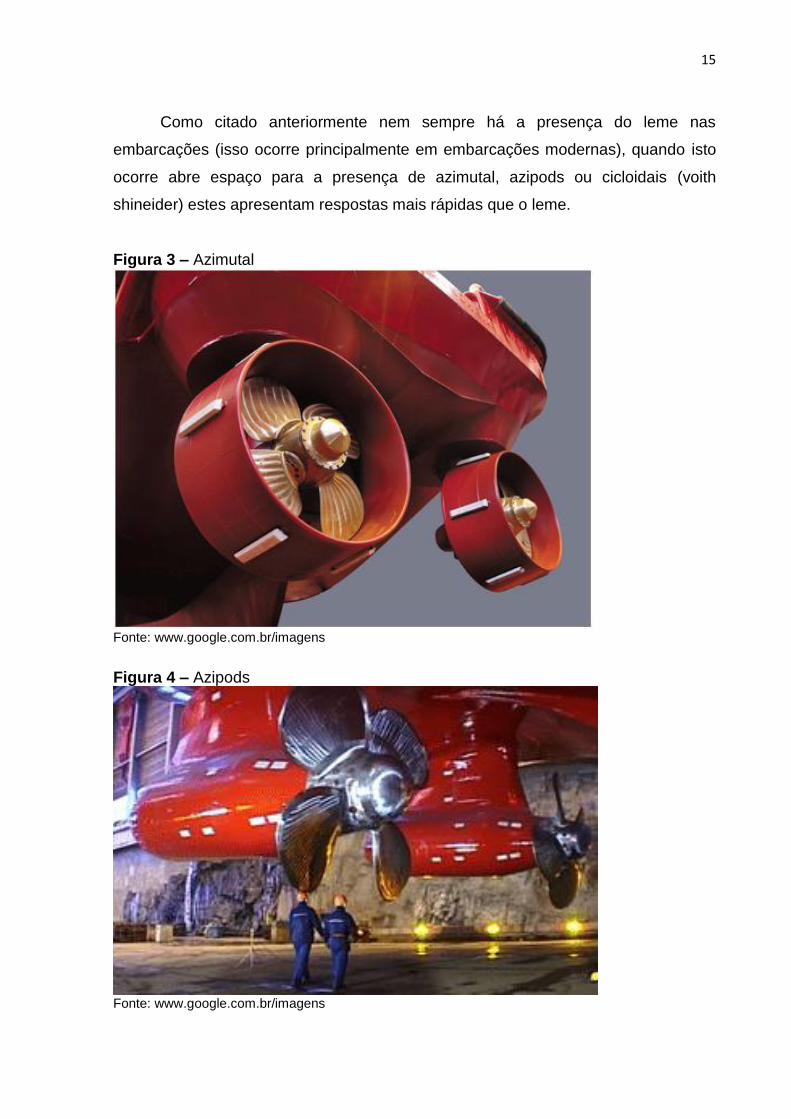
Como citado anteriormente nem sempre há a presença do leme nas
embarcações (isso ocorre principalmente em embarcações modernas), quando isto
ocorre abre espaço para a presença de azimutal, azipods ou cicloidais (voith
shineider) estes apresentam respostas mais rápidas que o leme.
Figura 3 – Azimutal
Fonte: www.google.com.br/imagens
Figura 4 – Azipods
Fonte: www.google.com.br/imagens

16
Basicamente o sistema de governo é composto principalmente pelos seguintes
tipos de controles:
• Alimentação: são disjuntores que ficam localizados em diferentes quadros.
Um disjuntor de uma unidade hidráulica no QEP, o da outra unidade hidráulica no
QEE e um disjuntor dos controles de transmissão no QEE.
• Liga/Desliga: fica na coluna do timão para iniciar o sistema de governo, desde
que esteja selecionado a opção “passadiço” na máquina do leme.
• Bombas 1 e 2: também na coluna do timão para ligar e desligar cada uma das
unidades hidráulicas.
• Canal: na coluna do timão para selecionar qual bordo será usado para
transmissão. Pode ser encontrado como “BB/BE”, ”A/B” ou “1/2”.
• Seletora de modo: chave na coluna do timão para selecionar um dos modos
de governo (NFU, FU ou PA).
Componentes do NFU: a NFU é um circuito puramente elétrico cuja manete
fecha um circuito que contorna todo o sistema FU para ligar diretamente a contatora
a uma das solenóides (BB ou BE). Existem 3 posições (BB, Central e BE) cada chave
aciona uma das solenóides. Em alguns navios o NFU pode ser acionado mesmo se
não tiver selecionada a opção “passadiço”, entretanto quando a manete for solta a
solenoide voltará a obedecer ao controle.
Figura 5 – Painel de Controle
Fonte: Autoria própria

17
2.1 Direções: “follow-up” e “non-follow-up”
Se um timoneiro automático estiver instalado, sua válvula de controle operada
por solenóide pode ser conectada diretamente ao receptor do telemotor. O problema
de manter o equilíbrio dos dois lados que impede esta prática com um telemotor de
tipo bypass não surge com o telemotor do tipo bomba, também o mesmo óleo de
carga é usado em todo o país.
Uma válvula de comutação com três posições é fornecida no console de
direção. Na posição "Mão", a bomba de ponte é conectada diretamente ao atuador do
leme, os tubos do receptor do telemotor são ignorados, enquanto a válvula de controle
do timoneiro automático sai da conexão com o receptor. A válvula de controle principal
é mantida por uma mola na posição de corte que sela a bomba de energia do atuador.
Assim, à medida que o leme se move em resposta à direção manual do
timoneiro, uma mola mantém a válvula de controle e o ponto central da alavanca
flutuante, mas como o receptor é contornado, a extremidade da alavanca flutuante
para a qual ele está conectado move-se livremente, enquanto a outra extremidade da
alavanca flutuante é movida pela cana.
Com a válvula de mudança sobre a posição "Gyro", a bomba da unidade da
ponte é cortada e a bomba de giroscópio opera o receptor do telemotor diretamente,
enquanto todos os tubos do controle da ponte são selados no galo de mudança.
Quando a válvula de mudança está na posição "Power", a bomba da unidade
do passadiço está conectada ao receptor e os tubos da engrenagem manual são
selados, enquanto a unidade de força gyro é selada pela sua válvula de controle
operada por solenóide. O controle manual da direção hidráulica da ponte pode então
ser realizado.
“Non- follow up” é o mais barato em conjunto com um timoneiro automático,
porque o controle de potência manual do passadiço é fornecido pela unidade
automática do timoneiro. Não há necessidade de duplicar o circuito de controle para
atender aos requisitos da Regra porque a direção da roda do leme do passadiço
fornece uma alternativa aceitável.

18
2.2 Válvulas de alivio, isolantes e de derivação
Os atuadores hidráulicos são fornecidos com válvulas de alívio e de derivação
entre pares de cilindros complementares ou câmaras de engrenagens de palhetas. As
válvulas de alívio são ajustadas para levantar as pressões acima do máximo normal.
As válvulas de derivação são normalmente fechadas, mas podem ser abertas
em uma engrenagem de dois cilindros para permitir a utilização de direção de
emergência. Em uma engrenagem de quatro cilindros. Um par de cilindros pode ser
ignorado enquanto o outro par fornece uma direção de emergência em torque
reduzido.
As válvulas de isolamento são fornecidas em cada cilindro ou câmara de
palheta rotativa que, quando fechada, segurará o leme prendendo o óleo nas
câmaras.
As válvulas de isolamento também são montadas em bombas para que uma
bomba possa ser completamente desligada do circuito e removida para manutenção
enquanto a direção continua com a outra bomba.
Figura 6 – Válvula de Isolamento
Fonte: www.google.com.br/imagens

19
No caso de engrenagens com bombas de curso variável duplicadas. Para poder
colocar rapidamente uma unidade de reserva em operação. Os mecanismos do curso
da bomba são acoplados permanentemente e ambas as bombas estão abertas para
o circuito hidráulico. Assim, só é necessário iniciar um motor para que o suporte pela
bomba seja operacional.
Como uma bomba de curso variável pode funcionar como um motor se o óleo
de pressão for aplicado a um lado enquanto estiver no curso, é necessário evitar o
engate de vento ou a rotação da bomba que está no serviço de espera. Caso contrário,
a saída da bomba de operação em vez de mover o aparelho de direção seria utilizada
na rotação da bomba de reserva.
Não é necessária nenhuma provisão especial contra o motor de uma bomba de
reserva no caso da bomba de curso variável, uma vez que o controle é efetuado
unicamente por uma válvula deslizante. Quando no modo de espera, esta válvula é
mantida na posição intermediária para que a bomba permaneça na condição de curso
zero e portanto, não pode ser motorizado pela bomba em serviço.
Quando as bombas de entrega fixas são duplicadas no fornecimento de óleo a
uma válvula de controle comum operada hidraulicamente, pode ser instalada uma
válvula de troca automática que irá isolar a bomba de reserva quando estiver em
repouso, mas conectá-la ao atuador quando a bomba for iniciada acima.
As bombas com válvulas operadas por solenóide são seladas do atuador pela
válvula de controle da maneira indicada acima a menos que um solenóide seja
energizado. O circuito elétrico deve, portanto, ser configurado para isolar os
solenóides quando a bomba não estiver em uso.
Figura 7 – Conjunto Bomba e Solenóide
Fonte: Autoria própria

20
2.3 Interruptores de parada e limite
As pausas de poste de popa estabelecem um limite absoluto para o movimento
de transferência do leme. As paradas mecânicas no atuador do leme funcionam antes
que os batentes do poste traseiro sejam atingidos. Estes assumem a forma de
batentes de plataforma para um quadrante ou calha de vapor ou diodo de direção
elétrica direta e limites de viagem em uma haste, palheta rotativa ou engrenagem de
pistão. As paradas no controle do passadiço estão configuradas para atuar antes que
as paradas mecânicas no atuador. Se o controle local é separado, eles são ajustados
entre as paradas do controle do passadiço e os batentes mecânicos do atuador. Se
houver um timoneiro automático, as paradas da unidade de potência são ajustadas
dentro do controle manual.
No caso de engrenagens sem seguimento ou dependentes do tempo, os
interruptores de fim de curso ou as válvulas são disparadas pelo atuador antes de
atingir os seus batentes mecânicos.
Outros tipos de parada no dispositivo de direção são aqueles que verificam a
viagem máxima de cada lado da posição de corte de uma válvula de vapor, válvula
hidráulica, curso de bomba ou interruptor e estão configurados para funcionar
imediatamente antes que esses vários controles atinjam o limite de sua viagem para
que não possam ser aplicadas cargas indevidas a essas peças.
2.4 Engrenagens de mão e energia hidráulica
Em navios pequenos, como coasters, rebocadores, arrastões e iates, é
frequentemente desejável dirigir manualmente e por poder; para o curso normal
mantendo-se no mar, a direção da roda do leme pode ser usada, enquanto em águas
lotadas ou canais estreitos onde as mudanças rápidas frequentes do leme são
necessárias, a direção hidráulica pode ser recorrida. As engrenagens da corrente do
passadiço forneceram a única maneira efetiva de fornecer essas instalações até a
introdução do mecanismo de direção hidráulico manual e elétrico. O que, além de
acabar com a transmissão da cadeia e todos os seus problemas. Também fornece
uma transmissão muito mais eficiente da direção da roda do leme do que era possível
com o antigo arranjo mecânico. Uma bomba rotativa de entrega fixa é acionada pelo
volante e conectada diretamente aos cilindros centrais na direção da roda do leme.

21
Existem diferentes métodos para controlar a direção hidráulica, sendo os tipos
de mamíferos os seguintes:
• Acompanhar a direção, o volante sendo usado tanto para a direção de força
como para a roda do leme, sendo a transmissão totalmente hidráulica;
• Direção "follow-up", o receptor de telemotor que controla uma válvula de
controle operada por solenóide;
• Direção hidráulica "non-follow-up" controlada pelo interruptor da mão direita e
esquerda na ponte Válvula de controle do solenóide de operação.
2.5 Carregamento
É essencial usar um grau de óleo recomendado pelo fabricante. Em todos os
casos, um óleo hidráulico de alta qualidade deve ser usado contendo inibidores contra
oxidação, espuma, ferrugem e desgaste e emulsão.
A fim de manter a carga de transmissão o mais baixa possível quando a direção
manual, as engrenagens de mão devem ter um óleo de viscosidade suficientemente
baixa e ponto de escoamento baixo (por exemplo Nº 1 Redwood a 21ºC (por exemplo,
125 a 250 a 29ºC 20ºF).
O grau de óleo para as engrenagens hidráulicas de energia é decidido pelo que
é o óleo mais adequado para as bombas instaladas. O intervalo é tão grande que não
é possível ser específico aqui, deve ser feita referência às recomendações do
fabricante da direção.
A limpeza absoluta é essencial. Antes de carregar, todos os tubos, cilindros,
válvulas, tanques, etc. do sistema devem ser cuidadosamente limpos e
inspecionados. Devem ser usados panos de linho limpos, nunca desperdiçam. Antes
de serem recontadas quaisquer fichas ou acessórios, a área ao redor e os recipientes
ou filtros usados devem ser cuidadosamente limpos. O óleo derramado em qualquer
parte do sistema deve ser colocado nos filtros de passagem.
Procedimento:
1) Remova os parafusos de acoplamento entre motores e bombas, parta os
motores para verificar se a rotação está correta; substitua os parafusos de
acoplamento.
2) Preencher os cilindros das engrenagens de haste ou engrenagens de palhetas;
substitua os tampões de enchimento. Feche as fichas de ar.

22
3) Preencha o tanque de abastecimento abaixo das bombas ou dos tanques de
fornecimento de carga da plataforma cilíndrica e das bombas de entrega fixas.
4) Abra as válvulas de bypass do cilindro e certifique-se de que as válvulas dos
tanques de abastecimento estão abertas. Válvulas de ar aberto em cima da
plataforma cilíndrica e das bombas de entrega fixas até o óleo sem ar sair;
feche as válvulas de ar. Reabasteça o tanque de abastecimento.
5) Abra a válvula de controle usando o controle local.
6) Gire a bomba manualmente, liberando ar no cilindro apropriado. Repita o outro
lado.
7) Parta o motor de arranque.
8) Mova o controle local de lado a lado.
9) Fechar a válvula de bypass verificando que, quando o atuador desloca o curso
da bomba ou a válvula de controle de fluxo do fluido. E esse movimento está
em direção à ordem do leme.

23
3 SISTEMAS DE GOVERNO
O sistema de governo de um navio tem por finalidade a facilitação da
manobrabilidade do navio, bem como auxiliar na manutenção da derrota. Neste
capitulo discorreremos sobre os principais tipos de sistemas de governo.
3.1 Leme a mão
Este tipo de sistema de governo é o mais simples. Geralmente usado nas
embarcações de pequeno porte. Formado por roda do leme, gualdropes e leme. Os
galdropes por sua vez são basicamente cabos de aço ou correntes, destinados a
transmitir o movimento da roda do leme ao leme. Uma peça cilíndrica tem o mesmo
eixo da roda do leme e é fixado a ele, esta conhecida como tambor. Os gualdropes
dão algumas voltas pelo seio neste tambor, seguindo seus chicotes, um por cada
bordo, até a cana do leme, onde são presos em cada um dos lados dela. Deste modo,
girando-se a roda do leme, e com ela o tambor, o gualdrope de um bordo vai-se
enrolando no tambor, e o do outro bordo vai-se desenrolando, movendo-se assim a
cana do leme.
Figura 8 – Leme a mão
Fonte: www.google.com.br/imagens

24
3.2 Máquina do leme ou servomotor
Mais moderno que o leme a mão, a máquina do leme, comumente chamada de
servomotor, recebe este recebe este nome pois ela é comandada a distância pelos
movimentos da roda do leme. Em geral o servomotor é instalado na popa, no próprio
compartimento do leme.
Nos navios mercantes, onde é necessário aproveitar o espaço interno do casco, o compartimento do servomotor é situado geralmente acima do convés. Nos navios de guerra de grande porte, este compartimento fica
abaixo da linha d’água e é protegido por couraça. (Fonseca, 1985).
As obrigações da máquina do leme são: aplicação súbita de grande força a
baixa velocidade, possibilidade de variação de velocidade por graus insensíveis e
inversão de marcha.
3.3 Servomotor a vapor
Este tipo de servomotor é utilizado em navios mercantes a vapor. A válvula de
distribuição de vapor é comandada pela roda do leme. Quando a roda do leme está a
meio, a válvula também está a meio de seu curso, fechando os canais de admissão
de vapor, e a máquina fica parada. Movendo-se a roda do leme para BE ou para BB,
a válvula de distribuição desloca-se para um ou para outro lado, dando entrada ao
vapor que vai movimentar a máquina no sentido correspondente.
Figura 9 – Servomotor a vapor
Fonte: www.google.com.br/imagens

25
3.4 Servomotor hidrelétrico
É notório o mecanismo mais eficiente para a movimentação do leme,
empregando aproximadamente metade da potência de um servomotor elétrico (será
citado adiante). Embora tenha um maior gasto em suas instalações, se comparado a
outros tipos de servomotor, sua manutenção é mais barata.
Neste tipo um motor elétrico fica ligado 24 horas, quando em viagem, com
velocidade constante e este motor aciona a bomba hidráulica (Existe nesta bomba um
regulador de velocidade que impede a sobrecarga). Tal bomba fornece fluido
hidráulico sobre sob pressão para tubulações conectadas a madre do leme. De acordo
com o movimento da roda do leme a bomba exerce pressão num lado da tubulação e
aspiração do outro. Por exemplo quando movimentamos o timão para boreste, a
madre do leme vai para bombordo e o leme gira para boreste, fazendo o navio quinar
para boreste, do mesmo modo o movimento do mecanismo no outro sentido tem o
efeito contrário invertendo o sentido do movimento o líquido sob pressão. Logo com o
leme a meio (posição neutra) não há fluxo de fluido, não havendo pressão na
tubulação.
O servomotor hidráulico necessita de um mecanismo compensador para fazer
para o movimento do leme quando ele atingir o angulo desejado. O objetivo do
mecanismo é neutralizar o efeito da roda do leme, quando esta deixa de girar, a
válvula é deslocada para a posição neutra, fazendo o sistema e consequentemente o
leme.
Figura 10 – Simulador de um Servomotor Hidrelétrico
Fonte: Autoria própria

26
3.5 Servomotor elétrico
O sentido e a amplitude de movimento do motor e, portanto, do leme, são dados
por um mecanismo de controle elétrico instalado na casa do leme, ou em qualquer
das outras estações de governo do navio. Este sistema permite a eliminação da roda
do leme, que é substituída por uma simples alavanca de controle. É fácil ver que neste
tipo se a alavanca estiver no meio o leme se encontra parado, ao passo que se
movimentar a alavanca para direita dá-se a partida no motor e leme vai para boreste
e se movermos a alavanca para esquerde dá-se a partida no motor e o leme vai para
bombordo. Neste caso não há a necessidade de um mecanismo compensador uma
vez que o leme se movimenta somente enquanto a alavanca de controle estiver fora
da posição neutra. Um freio mantém o leme na posição desejada.

27
4 LEGISLAÇÃO
Normas e padrões regulam a construção, o funcionamento e a segurança do
sistema de governo. Tais parâmetros são encontrados na convenção solas
(convenção internacional para salvaguarda da vida humana no mar). Esta tem por
proposito estabelecer os padrões mínimos para a construção de navios, para a
dotação de equipamentos de segurança e proteção, para os procedimentos de
emergência e para inspeções e emissões de certificados. Especificamente no que diz
respeito a sistema de governo encontramos nas determinações no SOLAS capitulo
ll/1 parte c.
Salvo se for expressamente determinado o contrário, todo navio deverá ser equipado com um aparelho de governo principal e um aparelho de governo auxiliar, à satisfação da Administração. O aparelho de governo principal e o aparelho de governo auxiliar deverão ser de tal modo planejados, de forma
que a falha de um deles não tornará o outro inoperante. (SOLAS, 2014)
No item 3 da regra 29 encontramos um dos itens mais importantes sobre o
assunto máquina do leme, a prova de mar. De acordo com esse tópico o aparelho de
governo principal e madre do leme deverão ser:
1) De resistência adequada e capazes de governar o navio na velocidade máxima de
serviço adiante, o que deverá ser demonstrado;
2) Capazes de poder levar o leme de uma posição de 35 graus de um bordo para
uma posição de 35 graus do outro bordo, com o navio navegando em água salgada
com calado máximo e dando adiante com a velocidade máxima de serviço e, nas
mesmas condições, de uma posição de 35 graus em ambos os bordos para uma
posição de 30 graus do bordo oposto, no tempo máximo de 28 segundos;
3) Acionados por fonte de energia quando necessário para atender as exigências do
parágrafo 3.2 e, em qualquer caso, quando a Administração exigir uma madre do
leme de diâmetro superior a 120 mm, na altura da cana do leme, excluindo reforço
para navegação no gelo; e
4) Projetados de maneira que não serão avariados quando o navio estiver dando toda
força atrás; no entanto, esta exigência de projeto não necessitará ser testada em
provas de mar, com o navio dando toda força atrás e com máximo ângulo de leme.

28
De tal modo, o aparelho de governo auxiliar deverá ser:
1) De resistência adequada e capaz de governar o navio em uma velocidade
aceitável para a navegação, e capaz de ser colocado prontamente em ação em
uma emergência;
2) Capaz de poder levar o leme de uma posição de 15 graus de um bordo para uma
posição de 15 graus do outro bordo em não mais do que 60 segundos, com o navio
navegando em água salgada com calado máximo e dando adiante com a metade
da velocidade máxima de serviço ou com a velocidade de 7 nós, o que for maior;
e
3) Acionado por fonte de energia quando necessário para atender as exigências do
parágrafo 4.2 e, em qualquer caso, quando a Administração exigir uma madre do
leme com diâmetro superior a 230 mm, na altura da cana do leme, excluindo
reforço para navegação no gelo.
De acordo com a convenção nem sempre será necessário a existência de
um aparelho de governo auxiliar, desde que o aparelho de governo principal
compreenda duas ou mais unidades motoras iguais e siga também as exigências
abaixo:
1) Em um navio de passageiro, o aparelho de governo principal seja capaz de
movimentar o leme como exigido no parágrafo 3.2, enquanto qualquer uma das
unidades motoras estiver fora de ação;
2) Em um navio de carga, o aparelho de governo principal seja capaz de movimentar
o leme como exigido no parágrafo 3.2, enquanto operando com todas as
unidades motoras; e
3) O aparelho de governo principal seja de tal modo planejado que depois de uma
única falha em seu sistema de canalizações ou em uma das unidades motoras,
o defeito possa ser isolado de modo que a capacidade de governo possa ser
mantida ou rapidamente restabelecida.
Na regra 30 discorreremos sobre a exigências complementares para o aparelho
de governo elétrico e eletro-hidráulico.
Dispositivos para indicar que os motores do aparelho de governo elétrico e
eletro-hidráulico estão em funcionamento deverão estar instalados no passadiço, e
em local adequado do controle das máquinas principais.
É notório, de acordo com a regra 30, a necessidade de dois circuitos exclusivos
alimentados diretamente pelo quadro elétrico principal, alimentando cada aparelho de

29
governo. Com tudo, um dos circuitos poderá ser alimentado pelo quadro elétrico de
emergência. Os circuitos alimentado um aparelho de governo deverá ter a capacidade
de alimentar todos os motores.
Deve existir ainda, proteção contra curto-circuito, alarme de sobrecarga,
proteção contra excesso de corrente. Caso ocorra a alimentação por corrente trifásica
é obrigatório a presença de um alarme de falta de fase.
É válido acrescentar que de acordo com o Solas um sistema hidráulico é
alimentado pelo QEP (quadro elétrico principal) e o outro é alimentado pelo QEE
(quadro elétrico de emergência) que, caso o navio apague o QEE receberá energia
do DGE (diesel gerador de emergência) em até 45 segundos.

30
5 TRANSMISSÕES E TIPOS DE MÁQUINA DO LEME
A transmissão de um sistema de governo compõe o conjunto de ações da
máquina do leme, tais como ligar e desligar, valores compreendendo ângulo do leme.
Acrescenta-se também indicadores de alarmes da máquina do leme.
Encontramos centrais de controles, no passadiço e no compartimento da
máquina do leme, sendo o passadiço a principal estação de controle. Vale ressaltar
que não é possível controlar o leme no CCM da praça de máquinas, existe apenas
uma repetição dos mesmos sinais visuais e sonoros, como a indicação de alarmes e
funcionamento.
5.1 Tipos de transmissão
❖ Transmissão entre roda do leme e servomotor;
❖ Transmissão mecânica: existe dois modos: transmissão flexível feito por
gualdropes e transmissão rígida feito por vergalhão de ferro (embarcação
menores) ou por eixo (grandes embarcações). Visando a redução do atrito
usam-se mancais de rolamento nas transmissões rígidas. Para pequenas
mudanças de direção usam-se juntas universais e para as mudanças maiores
de direção usam-se engrenagem cônicas;
❖ Transmissão hidráulica: É um tipo muito empregado em navios mercantes e de
guerra. Nesta transmissão usa-se um telemotor (trataremos a frente). Usa-se
a pressão líquida em tubulações, que correm por zonas protegidas do navio,
para transmissão. Por trabalhar com pressão, a entrada de ar na rede prejudica
o funcionamento, assim como a formação de bolha de gás quando a tubulação
passa por áreas de alta temperatura;
❖ Transmissão elétrica:
Neste tipo são usados motores selsyn (selfsyncronous isto é, auto sincronizados). O sistema consta de dois motores elétricos de corrente alternada, sendo um transmissor, comandado pela roda do leme, e um
receptor, ligado ao mecanismo de controle do servomotor. (Fonseca, 1985).
Também conhecido como motor-piloto, o transmissor identifica o sinal gerado
pelo movimento da roda do leme e os transmite, por condutores elétricos, ao
31
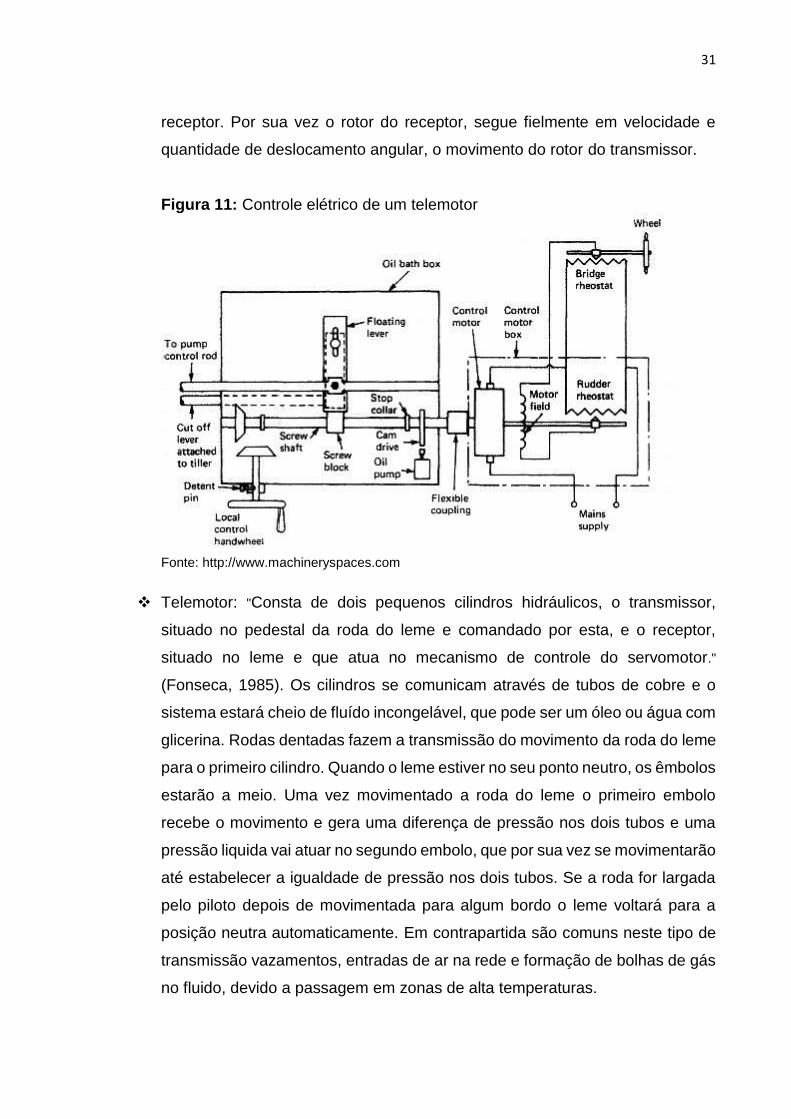
receptor. Por sua vez o rotor do receptor, segue fielmente em velocidade e
quantidade de deslocamento angular, o movimento do rotor do transmissor.
Figura 11: Controle elétrico de um telemotor
Fonte: http://www.machineryspaces.com
❖ Telemotor: "Consta de dois pequenos cilindros hidráulicos, o transmissor,
situado no pedestal da roda do leme e comandado por esta, e o receptor,
situado no leme e que atua no mecanismo de controle do servomotor."
(Fonseca, 1985). Os cilindros se comunicam através de tubos de cobre e o
sistema estará cheio de fluído incongelável, que pode ser um óleo ou água com
glicerina. Rodas dentadas fazem a transmissão do movimento da roda do leme
para o primeiro cilindro. Quando o leme estiver no seu ponto neutro, os êmbolos
estarão a meio. Uma vez movimentado a roda do leme o primeiro embolo
recebe o movimento e gera uma diferença de pressão nos dois tubos e uma
pressão liquida vai atuar no segundo embolo, que por sua vez se movimentarão
até estabelecer a igualdade de pressão nos dois tubos. Se a roda for largada
pelo piloto depois de movimentada para algum bordo o leme voltará para a
posição neutra automaticamente. Em contrapartida são comuns neste tipo de
transmissão vazamentos, entradas de ar na rede e formação de bolhas de gás
no fluido, devido a passagem em zonas de alta temperaturas.

32
❖ Transmissão entre servomotor e leme;
❖ Transmissão direta: É feita por meio de duas barras ligadas às duas
extremidades da cana do leme, fazendo o leme mover-se para um e outro
bordo;
❖ Transmissão quadrantal: A máquina do leme aciona uma pequena roda
dentada que engrena num quadrante; o quadrante é um setor dentado
rigidamente fixado à cana do leme. Geralmente empregados em máquina a
vapor, onde a válvula diferencial pode ser acionada por meio de gualdropes,
eixos ou telemotor;
❖ Transmissão de tambor: A transmissão é feita por meio de um cabo de aço (ou
corrente) sem fim, enrolado com determinado número de voltas num tambor;
os chicotes do cabo (ou corrente) são fixados à extremidade de um setor
quadrantal;
❖ Transmissão por parafuso sem fim: É um tipo de transmissão simples e segura
muito utilizado em navios mercantes, mas caiu em desuso em navios de guerra
por não ser muito eficiente.
O eixo da máquina do leme aciona um duplo parafuso sem fim, que tem rosca para a direita numa extremidade e rosca para a esquerda na outra; em cada parafuso sem fim trabalha um cursor, ao qual está ligado um tirante que vai
ter a uma das extremidades da cana do leme." (Fonseca, 1985).
Com isso, ao movimentar o parafuso sem fim, os dois cursores deslocam-se
em direções opostas, agindo em cima das extremidades do timão.
5.2 Elementos exigidos pela SOLAS
A Convenção SOLAS exige alguns elementos em qualquer sistema de governo
para todos os navios, são eles:
➢ Acionamento do transmissor sincro (Timão aciona, mecanicamente, dois
transmissores canal “A” e canal “B”, sendo apenas um conectado eletricamente
ao sistema), através da chave seletora de canal.
➢ Terminais “S” defasados do receptor, com isso circulará corrente.
➢ Corrente recebida pela Unidade eletrônica comparadora (recebe o sinal
do transmissor ligado ao timão e compara com o sinal recebido de outro
transmissor ligado mecanicamente a madre do leme).

33
➢ Na madre do leme também há outros 3 transmissores (ângulo do leme,
sistema de governo, canal “A” e “B”).
➢ Comparador percebe a diferença e ordena o fechamento de uma das
duas contatoras na máquina do leme (uma energiza a solenóide de BE e outra
de BB, nas duas unidades hidráulicas, simultaneamente).
➢ Nesse circuito, existe outra chave (em série) denominada "chave de fim
de curso" que quando a madre girar até o seu limite, ela abrirá o circuito
daquele bordo.
➢ Deve ser verificada eventualmente e sempre que grandes trabalhos de
manutenção ou reparos forem efetuados na máquina do leme.
➢ Evita sequências rápidas e sucessivas para ligar e desligar as
solenóides, pois o comparador compreende circuitos para amortecimento do
acionamento. O comparador repousará a contatora para desligar a solenoide,
assim que o transmissor ligado à madre do leme igualar o valor do transmissor
ligado ao timão.
➢ Há também intertravamento das solenóides para que não haja
acionamento simultâneo para os dois bordos.
5.3 Controle local e parâmetros
O controle local é feito na máquina do leme, acionando-se a válvula solenóide
manualmente, confira um exemplo na figura abaixo. Parâmetros que devem ser
obedecidos:
➢ Deve haver contato entre um tripulante da máquina do leme e outro do
passadiço, para saber o bordo para o qual o leme está carregado e o
ângulo em que ele se encontra.
➢ Remover o fio da válvula solenóide para aliviar a força manual
necessária (boa providencia).

34
Figura 12: Conjunto bomba e válvula solenoide
Fonte: Autoria própria
5.4 Sinais de uma tripulação treinada
Com o tempo uma tripulação começa a adquirir maior experiencia e
conhecimento da máquina, algumas atitudes indicam essa evolução, como exemplo
podemos observar:
➢ Junto a solenóide estará um pequeno pedaço de madeira para facilitar
o pressionamento da haste da válvula solenóide.
➢ Marcação dos solenóides, indicando qual é a válvula que carrega o leme
para BE e a que leva para BB.
➢ A régua do leme também estará bem marcada e iluminada.
É importante observar que um tripulante somente consegue acionar uma
válvula solenóide. Não se deve acionar as duas unidades hidráulicas ao mesmo
tempo.

35
6 FUNCIONAMENTO
Para facilitar o entendimento usaremos como base o funcionamento de um
sistema a vapor e então aprofundaremos explicando os tipos mais comuns usados na
área mercante: elétrico e eletro-hidráulico.
6.1 Controles
6.1.1 montagem da direção
Um conjunto típico da direção é ilustrado pelo diagrama de blocos na figura 13
consiste em um volante na ponte operada pelo timoneiro do qual a ordem “helm
applied” no transmissor para o controle do motor de direção. A atuação resultante faz
com que o motor de direção se mova e com ele o leme ao qual ele está conectado.
Figura 13: Diagrama de blocos de um sistema de direção a vapor controlado por eixo
Fonte: Steering Gear (Tradução: Karoline Camargo)
A informação de que o pedido “helm applied” foi obedecida é devolvida
automaticamente através de "engrenagem de caça" para o controle do motor de
direção, fazendo com que ele corte a energia no motor de direção de modo que ele
pare quando o ângulo de leme desejado for alcançado.
O ângulo do leme é a posição do volante em relação ao meio do navio. Os
volantes de alguns sistemas de controle mantêm uma relação fixa com o leme. Nesses
casos, um ponteiro indicador orientado para o volante regista o ângulo do leme,
informando o timoneiro do ângulo que o leme irá assumir, assumindo que as unidades
que compõem a montagem da engrenagem da direção funcionam corretamente.

36
Em outros sistemas de direção, o volante não mantém uma relação fixa com o
leme de modo que um indicador de leme voltado para o volante não pode ser fornecido
e, portanto, o indicador de leme independente é essencial.
6.1.2 controle de eixo
Este método de conexão do volante para operar o controle do motor de direção
foi amplamente utilizado em conjunto com a direção de vapor que conduz o leme por
meio de hastes e correntes. Devido à conexão direta do volante da ponte para o
controle da direção, a indicação verdadeira da posição do leme é dada por um ponteiro
na coluna da direção voltada para o volante. Este método não é adequado para
controle remoto.
6.1.3 telemotor hidráulico com by-pass do meio do navio
Os telemóveis hidráulicos foram desenvolvidos para fornecer o controle remoto
para o qual a unidade de eixo mostrou-se insatisfatória. Um transmissor na ponte
operado pelo volante é conectado por tubulação a um receptor, às vezes chamado de
"motorgear", acoplado ao controle do motor de direção. Os dispositivos elaborados
garantem que o receptor se mova com o transmissor e mantenha o passo com ele, de
modo que o volante mantenha uma relação fixa com o receptor. Isso permite que um
ponteiro volte para o volante para indicar o ângulo do leme ao timoneiro.
6.1.4 transmissor da haste do passadiço
O telemotor na figura 14 também possui um transmissor tipo haste e automático
válvulas de derivação operadas mecanicamente, mas uma característica muito
desejável de manter uma pressão no sistema é conseguida de maneira diferente.
Através de um by-pass telemotor geral, uma vez que com ele é possível ter uma ligeira
pressão inicial, pois isso garante uma resposta imediata às mudanças do leme. A
válvula no lado da pressão fecha imediatamente, antes que a válvula do outro lado
feche. Isso significa que este lado ainda está aberto para o tanque compensador e
porque a haste está sendo puxada para fora do cilindro. Uma ligeira pressão negativa
é criada que faz com que a válvula de sucção no tanque compensador seja aberta e

37
admita uma pequena quantidade extra de fluido no sistema. A válvula fecha-se então
e o efeito agora é que todo o sistema está ligeiramente sobrealimentado. A válvula de
alívio no tanque compensador é ajustada em 5-5 bar (801b / in2). Mantendo assim
esta pressão inicial. Quando o pistão do lado da pressão se move para fechar a
entrada de desvio, simultaneamente deixa o outro lado do sistema aberto para o
tanque compensador através da porta de derivação, permitindo que o fluido extra seja
aspirado. As válvulas de derivação do telemotor ilustradas na figura 14, aberto e
fechado simultaneamente. Então é fornecida uma unidade de sobrealimentação
especial, que está localizada entre os tanques compensador e as válvulas de
derivação e está equipado com um carregue o pistão de substituição. Cada vez que
o transmissor se aproxima da posição neutra, as varas de pouso entram. Gerando
pressão na câmara de sobrealimentação e fazendo com que o pistão de deslocamento
aumente contra a sua mola. O carregamento do pistão é tal que, quando levantado,
exerce a pressão de fluido requerida na câmara.
Figura 14: Telemotor
Fonte: http://www.machineryspaces.com

38
Normalmente, é feita provisão com esses sistemas de telemotores para permitir
controle manual do volante das unidades de direção a serem realizadas no
equipamento de direção em si. Estes telemotores podem ser instalados em consolas
de pontes. Quando usado com um timoneiro automático, uma alavanca com posições
"Mão" e "Gyro" está montada na coluna inter trancado com um interruptor. Na posição
"Mão", o telemotor hidráulico está no controle e o timoneiro automático é comutado
017. Na posição "Gyro", o timoneiro automático está no controle, e o telemotor
hidráulico é ignorado, o que permite o seu receptor, que ainda é acoplado ao controle
do motor de direção, movendo-se livremente sem controle de giroscópio. Quando um
controle do volante é movido rapidamente para atuar o leme, isso fará com que o
controle do motor de direção se mova para a posição totalmente aberta. Uma vez que
essa condição tenha sido alcançada, a velocidade máxima de movimento do leme é
obtida e o movimento adicional do volante não pode aumentar a velocidade de
movimento do leme. No entanto, pode resultar em danos ao mecanismo de controle
de direção se a força indevida for exercida pelo operador em um esforço equivocado
para conseguir um movimento mais rápido do leme.
6.1.5 telemotores tubo-bombas
A diferença essencial entre os transmissores de telemotores com os
transmissores de tipo bypass e bombas tipo meia nau são que a viagem do bypass o
transmissor é limitado pelo pistão ou pistão final do cilindro. Enquanto que a bomba
rotativa operada pelo volante em uma bomba o transmissor de tipo pode ser girado
indefinidamente em qualquer direção e não tem posição neutra fixa. Esta
característica torna-o adequado para a finalidade para a qual foi originalmente
projetado. Ou seja, operar guias que fornecem timão e direção hidráulica do
passadiço. A bomba acionada pelo volante pode ser usada para controlar a direção
hidráulica com relativamente poucas voltas de uma extremidade para outra, e também
para realizar a direção do timão com muitas outras voltas, o número real varia com o
torque do leme que decide a capacidade do atuador do leme.

39
6.2 Comando
6.2.1 piloto automático
Não se destina a lidar com o processo pelo qual a unidade de ponte do
timoneiro automático recebe suas instruções para mudar de direção, mas apenas para
mostrar como a unidade se liga ao Controle de direção.
Inicialmente, o timoneiro automático foi colocado ao lado da coluna do volante
e poderia ser preso para operá-lo em vez do timoneiro. Este método ainda é usado
para dirigir navios com direção manual.
Tem sido prática durante muitos anos que o timoneiro automático tenha sua
própria unidade de energia. Isso está localizado no controle do motor de direção, para
o qual os sinais da unidade de ponte são transmitidos.
6.2.2 unidade de energia eletromecânica
A figura 15 representa o tipo de unidade de energia eletromecânica utilizada na
conjunção com as formas anteriores de timoneiro automático em que a unidade de
controle estava alojada em uma coluna separada do telemotor hidráulico. "Mão" e
"Gyro". Na posição "Off", o timoneiro automático está fora de ação; na posição "Mão",
a roda-piloto pode ser usada para o manual controle do dispositivo de direção; E na
posição "Gyro" direção automática esta engrazado. Quando a alavanca de controle
está nas posições "Mão" ou "Giro". Uma válvula de derivação no transmissor do
telemotor hidráulico deve ser aberta de modo que o receptor do telemotor pode se
mover livremente. A unidade de energia está ligada à controle de direção e
compreende um motor de direção, cremalheira. A Máquina é alimentada diretamente
da rede do navio e, para garantir que ele pare rapidamente quando um sinal é
cancelado, a travagem dinâmica é utilizada. O motor impulsiona a cremalheira através
de engrenagens e uma embreagem eletromagnética, a cremalheira sendo acoplado
ao controle da direção. A embreagem é necessária na unidade de força para que o
motor e a cremalheira sejam desconectados quando o giroscópio piloto não está em
uso.
A cremalheira ira mover-se então livremente quando o telemotor hidráulico está
sendo empregado. A bobina da embreagem eletromagnética é conectada através de

40
um controle interruptor, operado pela alavanca de controle. O circuito sendo
completado somente quando a alavanca de controle está na posição "Mão" ou "Giro".
Nesse caso. "Mão refere-se ao volante no timoneiro automático e não à operação
manual por meio do telemotor hidráulico. A embreagem também atua como um
dispositivo de segurança, sendo projetado para deslizar sob carga de torque
excessiva. Em muitas dessas instalações iniciais, não houve nenhum interruptor de
segurança acoplado. Para a alavanca que opera o bypass no telemotor. Assim, em
tais instalações é muito importante ver que esta alavanca é colocada na posição
"Gyro" antes de avançar na unidade de giroscópio, igualmente, se o telemotor
hidráulico fosse operado com a unidade de giroscópio comutada, embora haja uma
embreagem escorregadia na unidade de poder de giroscópio (que é projetado para
dividir sob carga excessiva), podem ser acumuladas pressões excessivas no sistema
hidráulico antes que a embreagem se deslize.
Figura 15: Unidade de energia eletromecânica
Fonte: Steering Gear

41
6.2.3 unidade de potência eletro hidráulica
É prática corrente usar um método eletro-hidráulico para conduzir o controle de
direção em vez do método eletromecânico que acabamos de descrever do qual é visto
que os impulsos de controle do timoneiro automático são direcionados, através dos
amplificadores de controle e potência, para operar solenóides acoplados a um sistema
hidráulico válvula de controle direcional. Esta válvula, trabalhando em conjunto com
uma unidade de potência hidráulica, dirige o fluido hidráulico para um lado ou outro
do pistão em um conjunto de receptor, que é semelhante em princípio aos já descritos
nos sistemas de controle de telemotores hidráulicos. Esta montagem então atua
através de uma engrenagem de controle de controle de fluxo da mesma maneira que
um receptor de telemotor, assim fazendo com que os dois da direção principal e o
leme se movam para a nova posição ditada pelo timoneiro automático. Também é
acoplado a uma repetição unidade de sincronização de volta que foi projetada para
cancelar o sinal de controle original do timoneiro automático assim que o ângulo de
leme necessário foi aplicado. A prática moderna é combinar o telemotor e o timoneiro
automático.

42
7 TESTES EXIGIDOS
7.1 Teste no porto e antes da partida
No Capítulo V do SOLAS, Regulamento 26 e 33, CFR Capítulo 1 “Testes antes
de entrar ou começar uma rota” devem ser cumpridos. Durante as estadias no porto
entre viagens ou passagens, um teste deve ser realizado dentro de 12 horas do tempo
estimado de "standby de saída".
A prática normal aceitável é uma hora antes da partida, com todos os motores
do gerador/alternador necessários para a preparação de partida em linha, e os oficiais
de serviço do passadiço e da praça de máquinas. Antes do teste, as seguintes
verificações devem ser realizadas:
❖ Os níveis de óleo hidráulico na engrenagem principal, seu tanque de reserva
(nível mínimo equivalente a 90% de capacidade total) e os sistemas de
telemotores.
❖ Os pontos de graxa e os arranjos de lubrificação.
❖ Uma inspeção visual do aparelho de direção e da ligação associada.
❖ O sistema de comunicação entre o compartimento da máquina do leme e o
passadiço.
No teste deve-se incluir o seguinte:
1) O aparelho de direção principal, unidades de potência, bombas e maquinaria
hidráulica.
2) Todos os controles de direção manual do passadiço.
3) O espaço do sistema de controle elétrico do passadiço/telemotor.
4) Operação manual do controle de direção da máquina.
5) Alarmes de falha da unidade de energia.
6) Todos os indicadores remotos de ângulo do leme.
7) Movimentação do leme de extremo bombordo para extremo boreste ou de
extremo boreste para extremo bombordo.
8) Arranjos de isolamento automático e outros equipamentos automáticos.
Durante esta operação, os indicadores remotos angulares do leme devem ser
verificados quanto à precisão com o indicador mestre afixado ao aparelho de direção.
As leituras do amperímetro de ambos os motores devem ser registradas no diário de
bordo da praça de máquinas. O tempo que o leme leva para se mover mais de 35

43
graus de um lado para o outro tem de ser registrado para ambos os motores
individualmente e depois juntos. Esses tempos devem ser comparados com os
horários especificados pelo fabricante.
Se o tempo necessário para mover o leme 35 graus de um dos lados para 30
graus do outro exceder 28 segundos usando ambos os motores, então o
departamento de gerenciamento apropriado deve ser avisado. É importante que, à
medida que o leme se aproxima da posição desejada, a bomba ou das bombas em
uso “saiam da linha”, reduzindo a velocidade de descarga das bombas e, portanto, o
ritmo de percurso do leme. Esta funcionalidade é necessária para que o leme não
ultrapasse os limites de viagem projetados. Um sistema feedback consistindo em uma
conexão no controle das bombas ou um dispositivo eletrônico equivalente cuida disso
e é importante que o teste do sistema de direção verifique se isso ocorre.
Quando difícil, o leme não deve exceder o limite designado, pois isso pode levar
o leme a ficar preso nessa posição. O requisito SOLAS é de 35 graus nos dois lados.
Um teste de risco deve ser realizado, e os resultados registrados no Registro
da sala de máquinas. As marcas de prova do leme para o braço do leme e os
recipientes com conexões de ajuste de conicidade devem ser verificados para garantir
que nenhum deslocamento ou deslizamento tenha ocorrido. O desgaste deve ser
verificado usando o medidor de pôquer ou outro dispositivo, conforme apropriado, e
as leituras registradas no registro do quarto do motor.
Quando não há provas ou meios de verificação, o escritório deve ser informado,
e essas marcas serão introduzidas o mais rápido possível. Na porta, quando o navio
estiver em um rascunho adequado e o acesso está disponível, o Engenheiro Chefe
deve ver as conexões de estoque do leme, ou seja, parafusos de palmeiras, etc. e,
sempre que possível, a folga de salto. Com lemes que não possuem conexões visíveis
externamente, a posição do leme em um plano horizontal em relação ao quadro /
casco deve ser cuidadosamente examinada.
Qualquer evidência de danos, folga ou alteração na posição do leme em
relação ao casco do navio em um plano horizontal deve ser comunicada ao Escritório
imediatamente. Após um período de reparo, secagem em seco ou colocação, um teste
deve ser realizado logo que seja prático.

44
7.2 Teste de mar
O teste do dispositivo de direção no mar está na jurisdição do Comandante. O
Comandante deve estar no passadiço e o Chefe de Máquinas no compartimento do
aparelho de direção no momento do teste. (33CFR Capítulo 1 164.25 a ser cumprido).
Sob a velocidade normal do mar, o leme deve ser movimentado da extremidade
de um dos bordos até a extremidade do outro bordo usando um motor e, em seguida,
o outro motor. Este processo deve ser repetido usando ambos os motores. As leituras
do amperímetro durante esses testes devem ser registradas e inseridas no Livro de
registro do centro de controle de máquinas. Se o tempo necessário para mover o leme
de 35 graus de cada lado para 30 graus do outro lado ultrapassar 28 segundos,
quando utilizar ambos os motores, o departamento de gerenciamento apropriado deve
ser avisado.
Em embarcações com aparelho de direção projetado para operar com apenas
um motor mesmo quando em manobra (o segundo motor em espera), a operação de
um único motor deve atender a este critério. Um teste de fluência também deve ser
realizado e os resultados registrados no Livro de registro do centro de controle de
máquinas.
No Teste de Creep que consiste na operação com 1 motor em uma
configuração a meio-navio. Se o leme rastejar mais de 5 graus em um minuto, o
departamento de gerenciamento deve ser avisado.
7.3 Broca de direção de emergência
Um teste da broca de direção de emergência deve ser realizado pelo menos
uma vez a cada 3 meses. Consisti no funcionamento direto do aparelho de direção
principal por controle manual dentro da casa do leme. A direção deve ser mandada
pela comunicação do passadiço para a casa do leme. Quando aplicável, a operação
de fontes alternativas de energia deve ser testada. Os avisos devem ser postados ao
lado da estação de emergência do aparelho de direção com aviso prévio de que
nenhum teste do sistema de controle da direção ou seus componentes deve ocorrer
enquanto o navio estiver em andamento, a menos que sob a supervisão direta do
Chefe de máquinas. Todo o pessoal do navio deve ser informado deste requisito.

45
7.4 Procedimentos de mudança elétrica, hidráulica e mecânica
Todos os oficiais de máquinas devem poder realizar os procedimentos de troca
elétrica, hidráulica e mecânica. Se não existir, um diagrama de posição da válvula
deve ser produzido com a posição de todas as válvulas. Tais válvulas devem ser
claramente marcadas por números ou letras.
Estes diagramas normalmente mostram as seguintes situações, a menos que
o dispositivo de direção seja do tipo rotativo de palhetas:
A) bomba hidráulica de boreste em uso;
B) bomba hidráulica de bombordo em uso;
C) bomba hidráulica de boreste e bombordo em uso;
D) bomba hidráulica de emergência em uso;
E) as quatro hastes hidráulicas em uso;
F) somente após o uso da haste hidráulica oposta;
G) apenas a haste hidráulica de vante em uso;
H) apenas as hastes de boreste em uso;
I) apenas as hastes de bombordo em uso.
O Comandante e Chefe de máquinas devem informar ao Escritório de Gestão
relevante, tubos hidráulicos comuns no sistema que, em caso de falha, resultariam em
ter todo o equipamento de governo fora de serviço.

46
8 CONSIDERAÇÕES FINAIS
O trabalho teve como objetivo apresentar os principais tipos de sistema de
governo, além disso os tipos de transmissão mais utilizados por tais sistemas.
Ressaltando ainda as regras estipuladas pela IMO através da Solas e a importância
destas regras para o bom e correto funcionamento dos sistemas de governo, mostrado
também os testes exigidos pela convenção.
Desde os primórdios da navegação a necessidade de um sistema de governo
rápido e eficiente era evidente. Este trabalho nos possibilita uma viagem pela linha do
tempo dos avanços tecnológicos da máquina do leme ampliando de maneira
significativa o nosso conhecimento, aumentando assim nossa compreensão sobre o
tema e os diferentes tipos de sistema de governo e suas aplicações práticas.
Pelo fato exposto percebe-se que a máquina do leme é de extrema importância
para os navios uma vez que é responsável pela manutenção da derrota, evitar perigos
a navegação, impedir colisões e auxiliar nas manobras de atracação e desatracação.
Vale ressaltar a importância se respeitar as regras impostas pela IMO bem como as
realizações dos testes exigidos
Com tudo e evidente que a modernização do sistema de governo acrescentou
muito para o meio marítimo devido a facilidade e rapidez de realizar manobras
atualmente que antes eram consideradas muito complexas. Fernando Pessoa uma
vez disse " Navegar é preciso, viver não é preciso" e esta precisão só é possível
graças ao perfeito conjunto e harmonia entre a roda do leme e o timão possibilidades
pela máquina do leme.
47
REFERÊNCIAS
CONVENÇÃO INTERNACIONAL PARA SALVAGUARDA DA VIDA HUMANA NO MAR. (1974) BRASIL Diretoria de Portos e Costas. Convenção internacional para salvaguarda da vida humana no mar Solas 1974 e protocolo de 1978 relativo à convenção Solas – 1974. Rio de Janeiro: DPC, 1983. 339p. FONSECA, M. M. Arte Naval. 7. ed. Rio de Janeiro: Documentação da Marinha, 2005. p. 559-567. PAULIN, W. S.; FOWLER D. J. Steering Gear. 1 ed. London: The Institute of Marine Engineers, 1975. 74p. (Marine engineers practice, v.1, pt.9). SÁ, Aníbal B. Máquina do leme. Rio de Janeiro, 1987. 25p. SILVA, Luiz C. M. Máquina do leme. Rio de Janeiro, 1991. 27p. WHITE, San D. Steering Gear Testing. Disponível em: <http://www.machineryspaces.com/steering-gear-testing.html> Acesso em: 18 de maio de 2017.
Copyright © 2022 FDOKUMEN

