





Bahasa
Halaman
Hukum


MECHANIZMY ROBOTÓW
M A N I P U L A T O R Y
układ mechaniczny
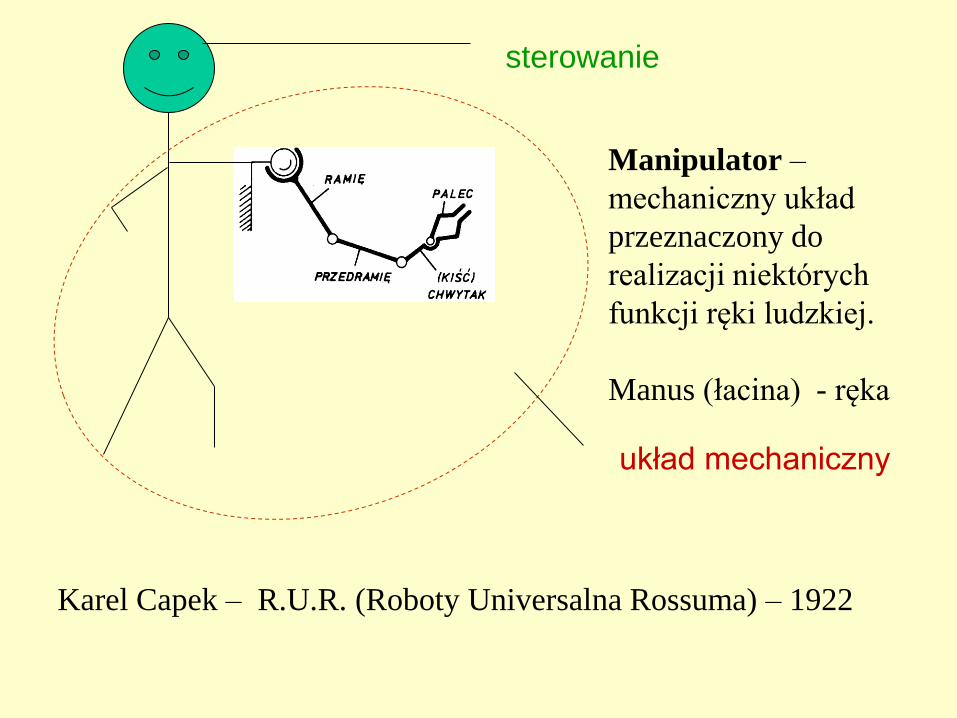
sterowanie
Karel Capek – R.U.R. (Roboty Universalna Rossuma) – 1922
Manipulator –
mechaniczny układ
przeznaczony do
realizacji niektórych
funkcji ręki ludzkiej.
Manus (łacina) - ręka
1. Robot nie może skrzywdzić człowieka, ani przez
zaniechanie działania dopuścić, aby człowiek doznał
krzywdy.
2. Robot musi być posłuszny rozkazom człowieka, chyba że
stoją one w sprzeczności z Pierwszym Prawem.
3. Robot musi chronić sam siebie, jeśli tylko nie stoi to w
sprzeczności z Pierwszym lub Drugim Prawem.
Prawa robotów :
Isaac Asimov w roku 1942 stworzył trzy prawa robotów i
przedstawił je w fantastycznym opowiadaniu Zabawa w berka
(Runaround).
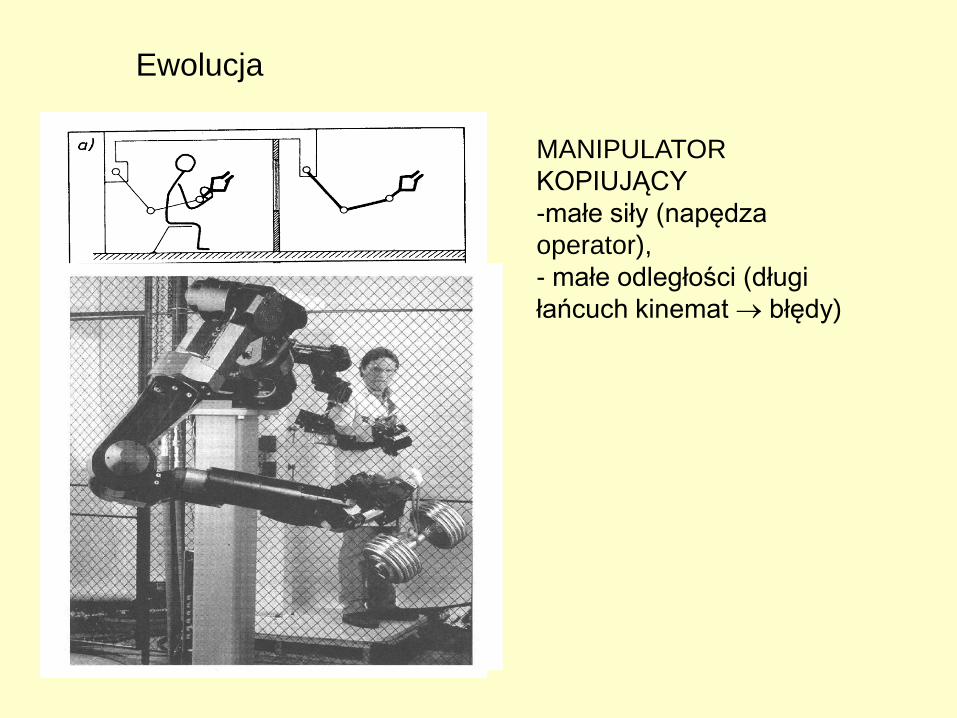
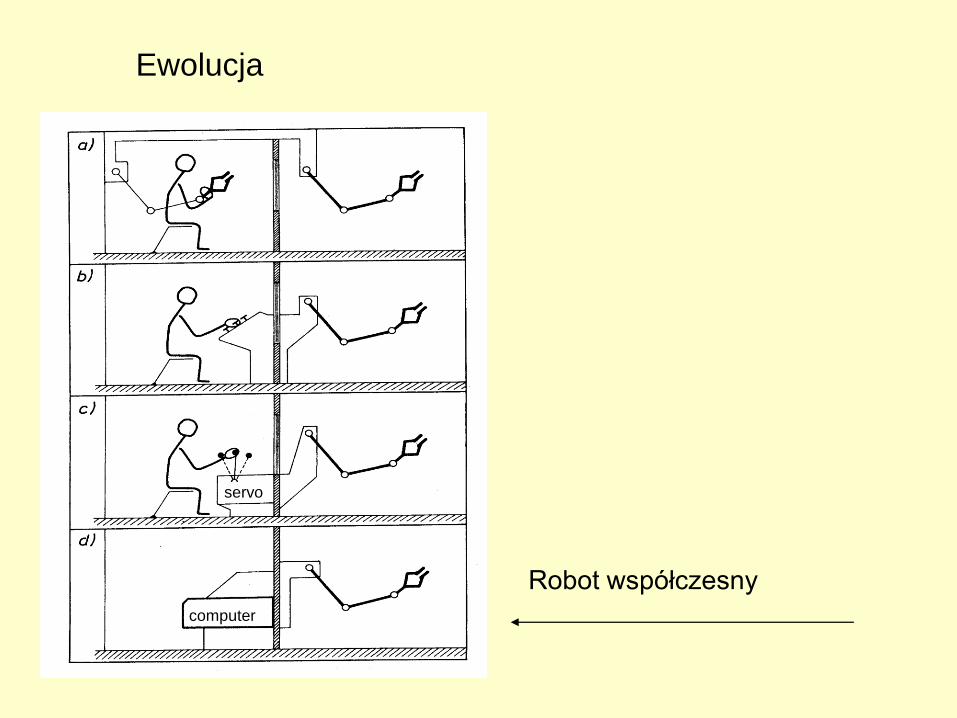
Ewolucja
MANIPULATOR
KOPIUJĄCY
-małe siły (napędza
operator),
- małe odległości (długi
łańcuch kinemat błędy)
servo
computer

servo
computer
operator steruje za pomocą
przycisków (brak „czucia”)
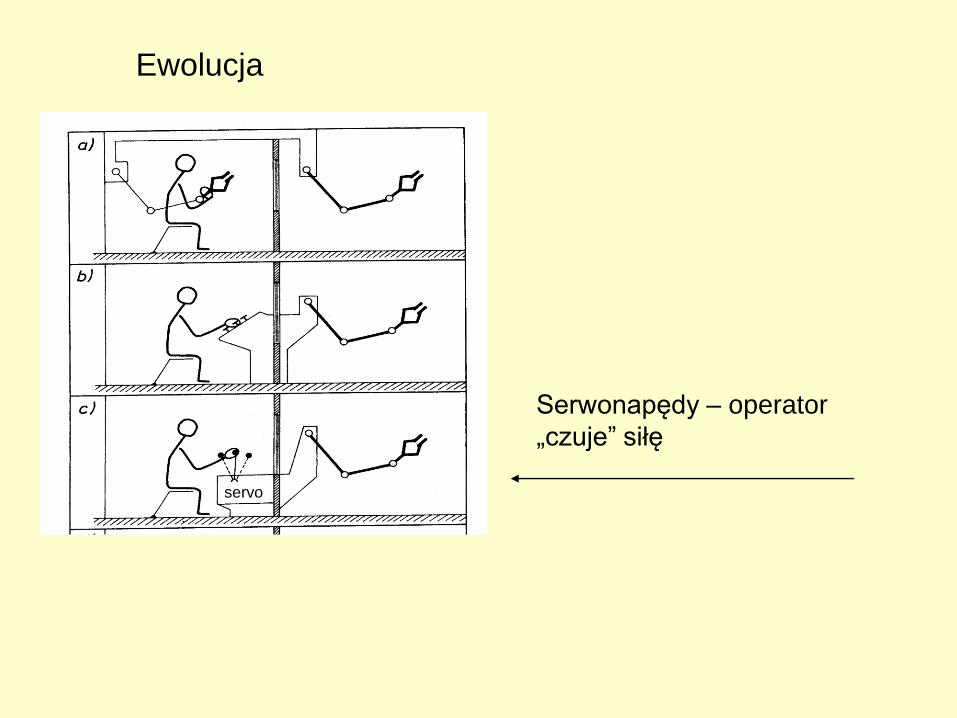
Ewolucja
Ewolucja
Serwonapędy – operator
„czuje” siłę
servo
computer
Ewolucja
servo
computer
Robot współczesny
ZASTOSOWANIA:
PRACA W SRODOWISKU NIEBEZPIECZNYM:
•PROMIENIOWANIE, SKAŻENIE
•ZAGROŻENIE EKSPLOZJĄ
•WYSOKIE CIŚNIENIE
•GŁĘBIA
UCIĄŻLIWE I POWTARZALNE OPERACJE TECHNOLOGICZNE
•MONTAZOWE, SPAWALNICZE, OBRÓBCZE, ...
MEDYCYNA, OCHRONA ZDROWIA
•REHABILITACJA
•ZABIEGI OPERACYJNE
•OPIEKA NAD NIEPEŁNOSPRAWNYMI
INNE
Producenci:
ABB
KUKA
Panasonic
Motoman
Mitsubishi
FANUC
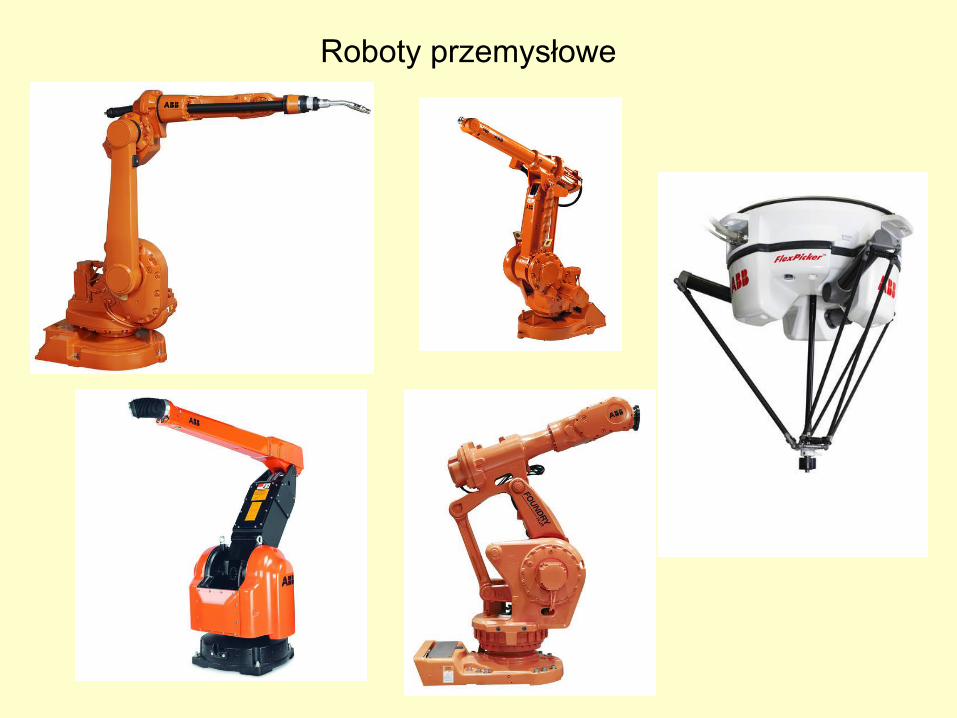
Roboty przemysłowe
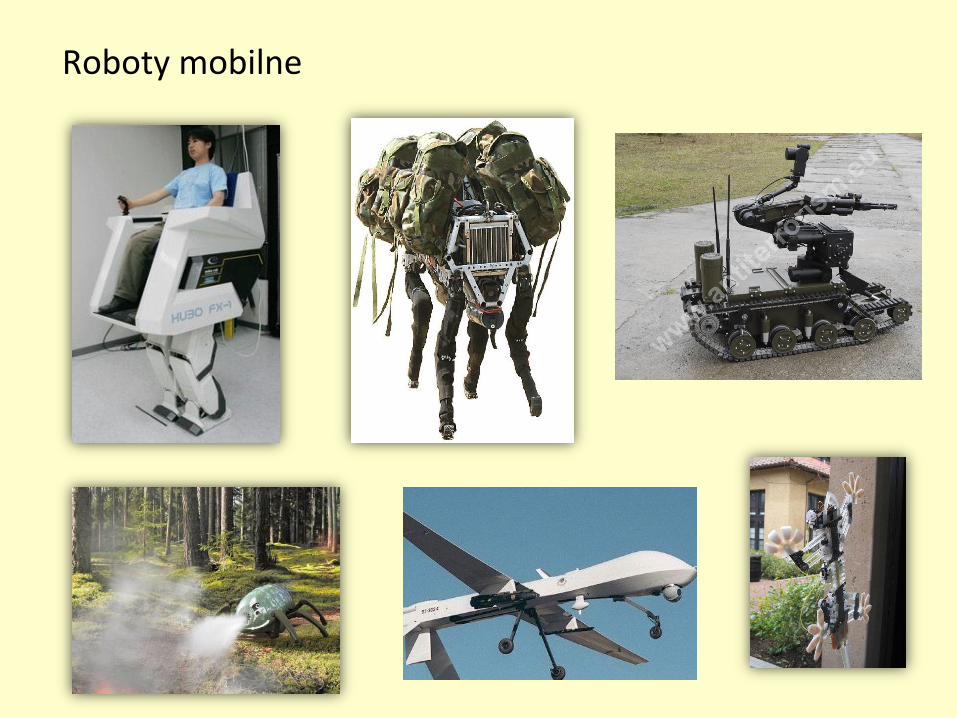
Roboty mobilne

Manipulator do inspekcji mostów i wiaduktów
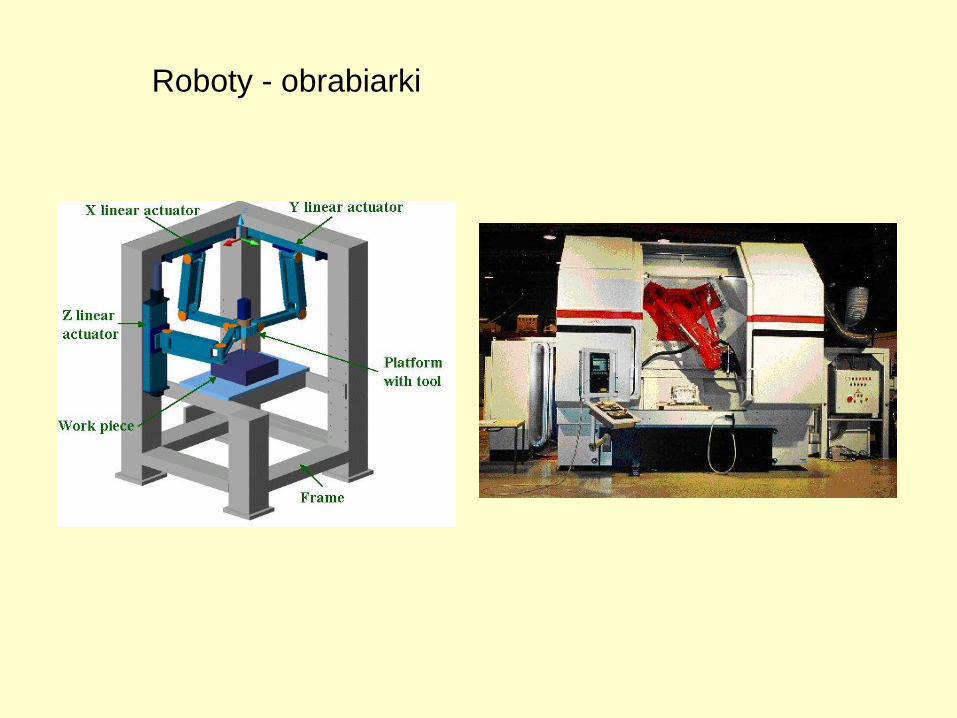
Roboty - obrabiarki

Manipulator medyczne i rehabilitacyjne
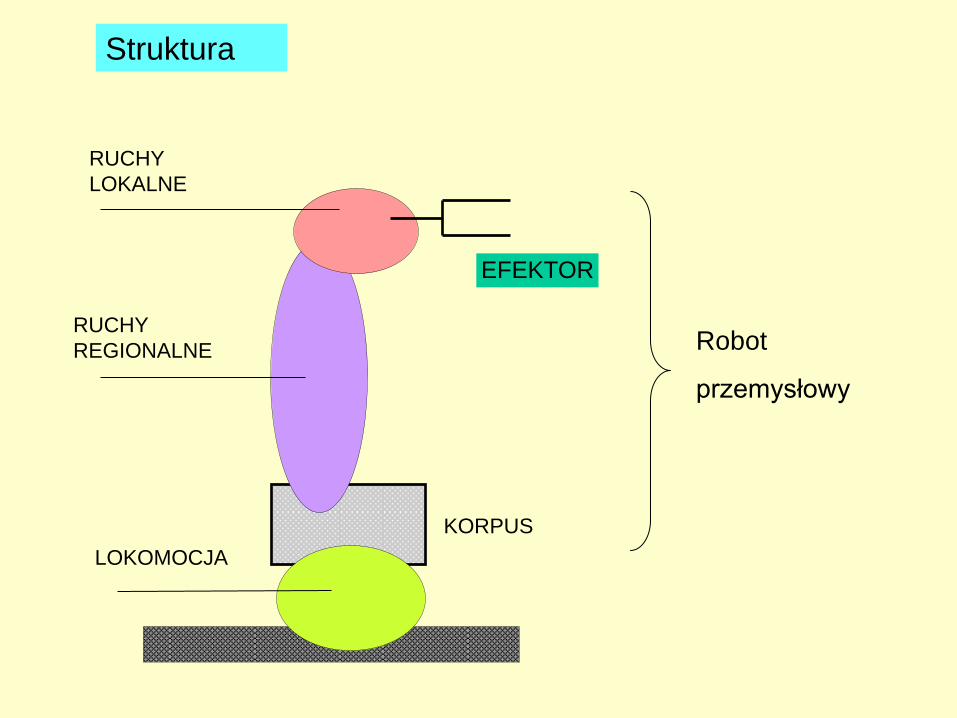
EFEKTOR
KORPUS
RUCHY
LOKALNE
RUCHY
REGIONALNE
LOKOMOCJA
Robot
przemysłowy
Struktura
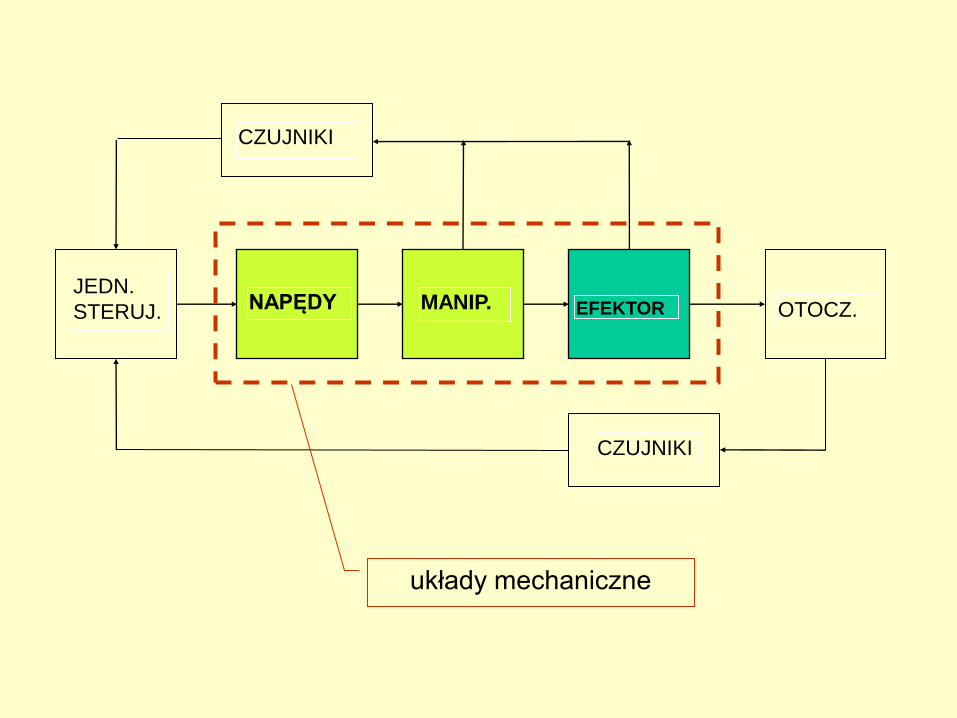
CZUJNIKI
CZUJNIKI
OTOCZ. JEDN.
STERUJ. NAPĘDY MANIP. EFEKTOR
układy mechaniczne

Ogólny schemat strukturalny manipulatora:
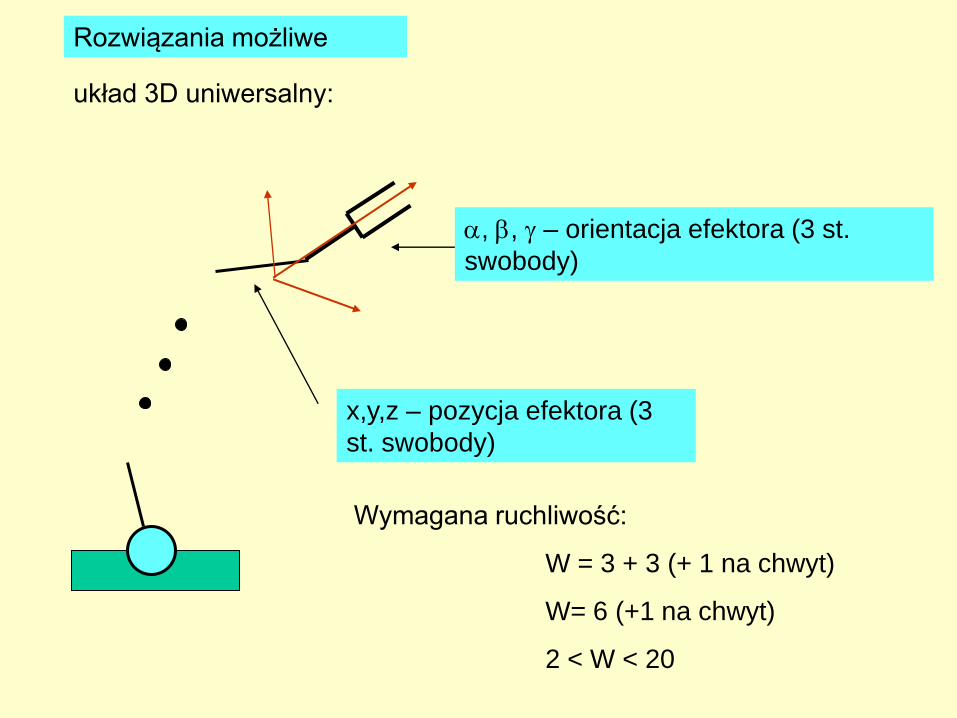
Rozwiązania możliwe
układ 3D uniwersalny:
x,y,z – pozycja efektora (3
st. swobody)
, , – orientacja efektora (3 st.
swobody)
Wymagana ruchliwość:
W = 3 + 3 (+ 1 na chwyt)
W= 6 (+1 na chwyt)
2 < W < 20
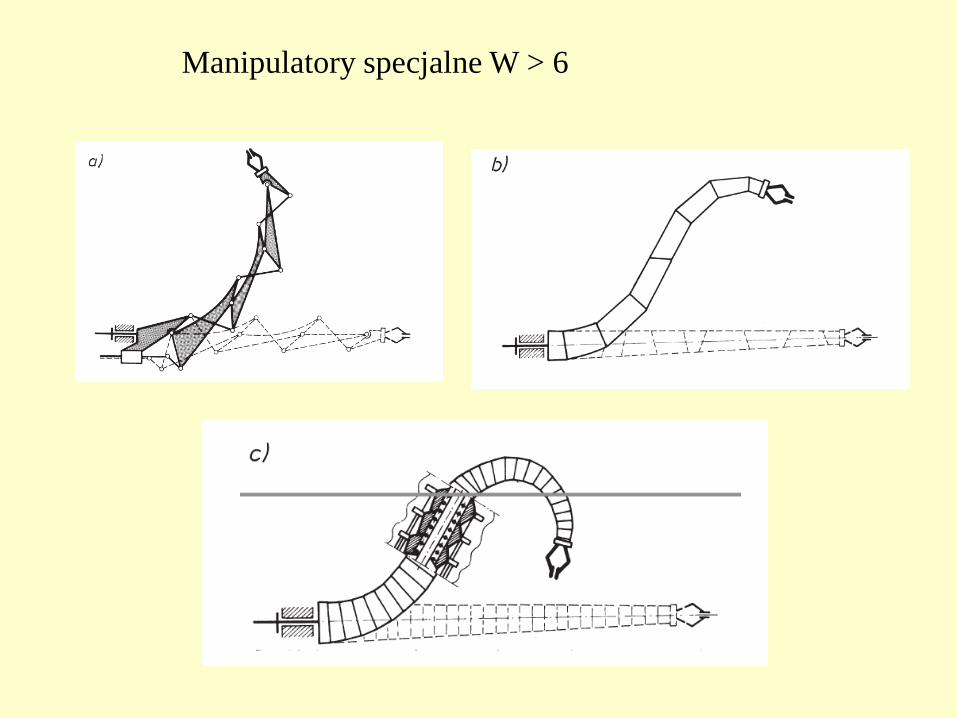
Manipulatory specjalne W > 6

Manipulatory przemysłowe:
szeregowe oraz równoległe
O strukturze otwartych
łańcuchów kinematycznych
O strukturze zamkniętych
łańcuchów kinematycznych
2RT RTR R2T TRT 3R T2R 2TR 3T
T R T T R R R T C
R T T R R R T T B
R R R T R T T T A
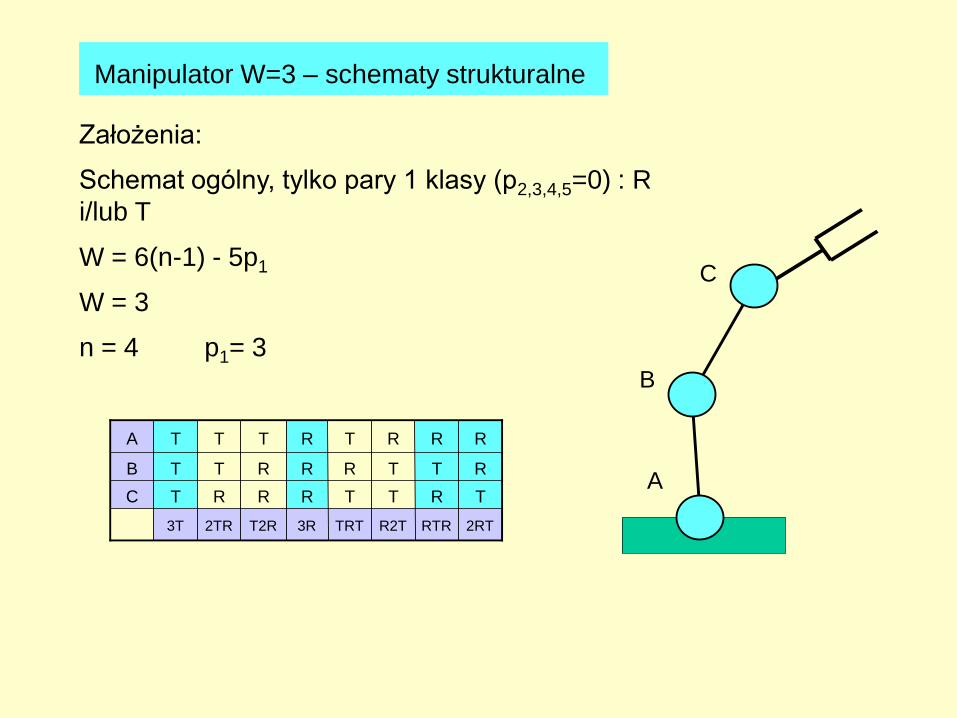
Manipulator W=3 – schematy strukturalne
Założenia:
Schemat ogólny, tylko pary 1 klasy (p2,3,4,5=0) : R
i/lub T
W = 6(n-1) - 5p1
W = 3
n = 4 p1= 3
A
B
C
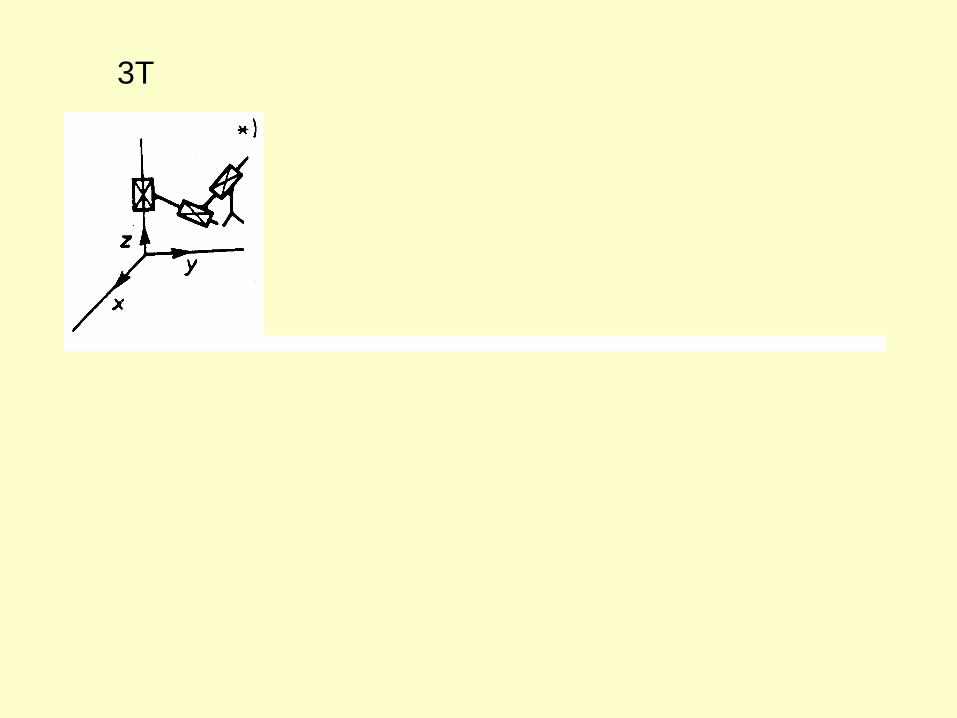
3T
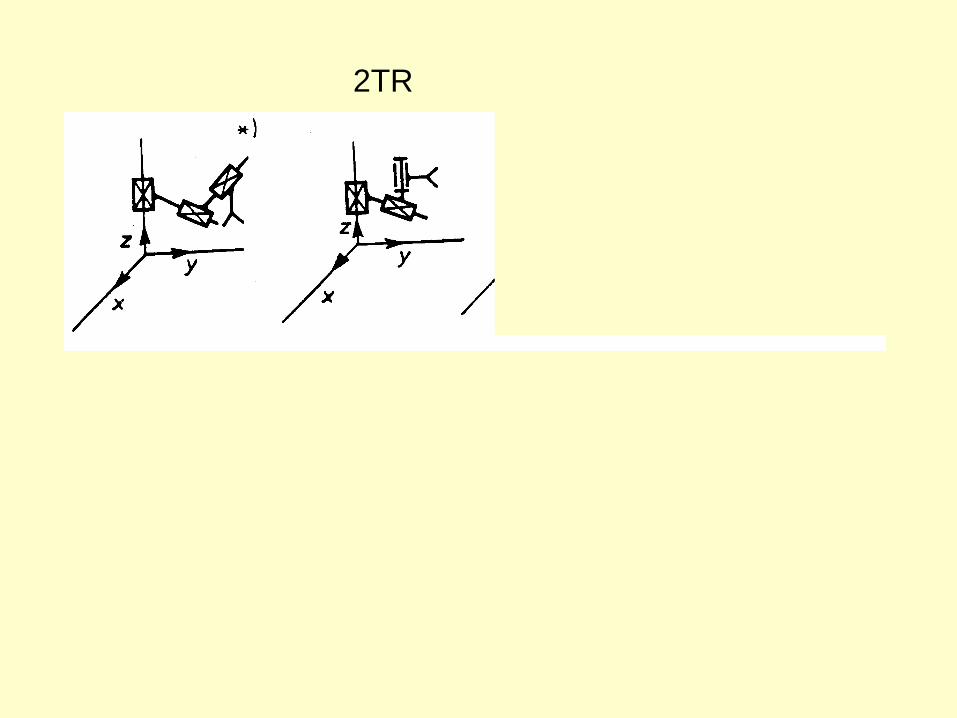
2TR
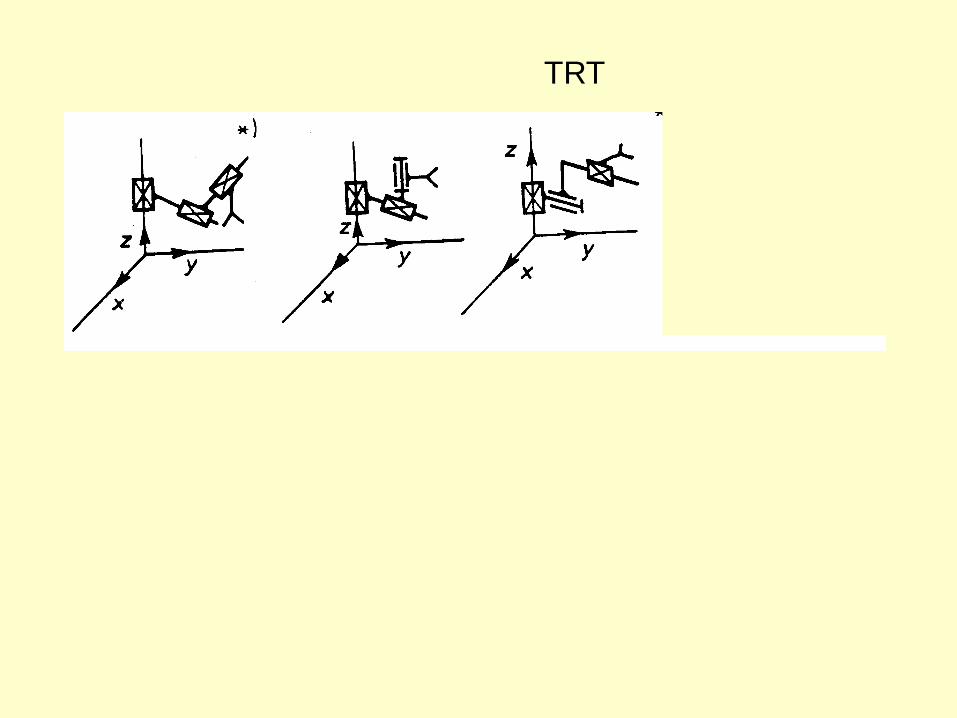
TRT
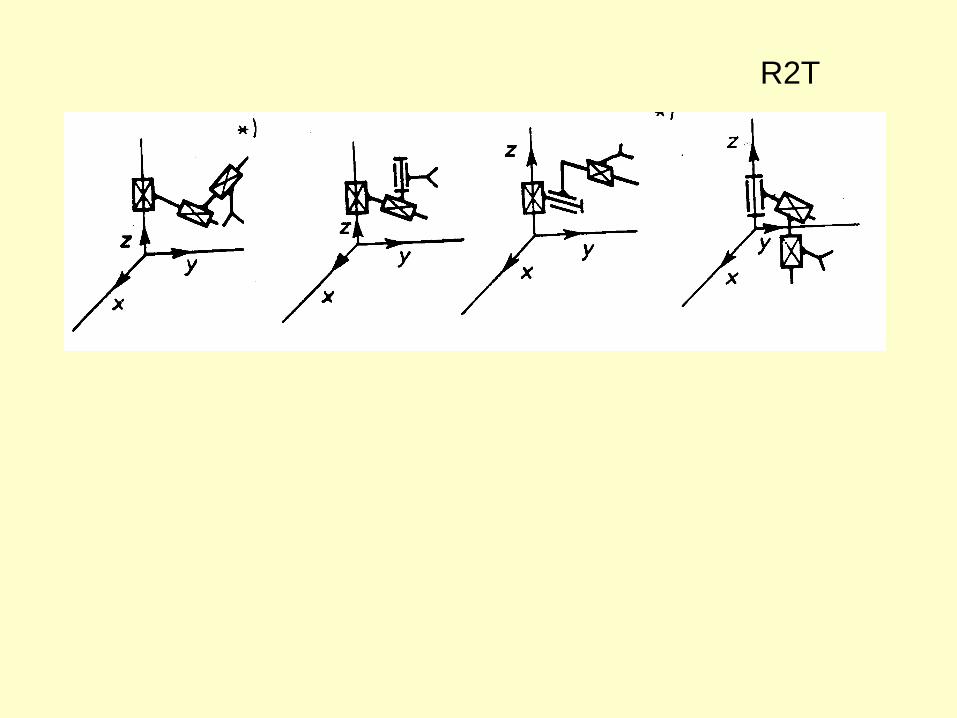
R2T
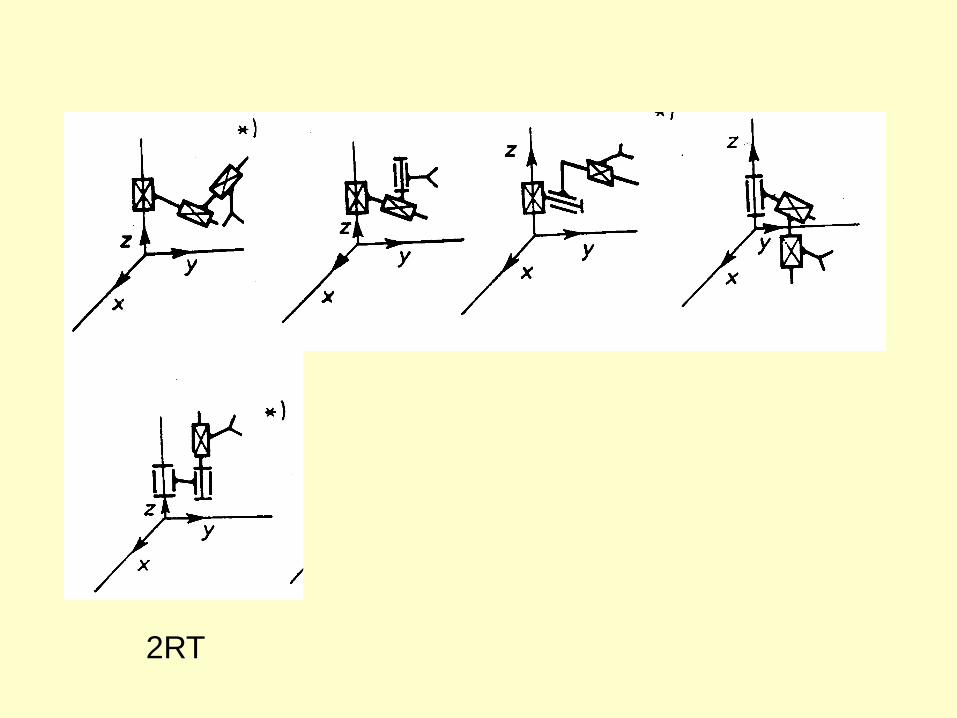
2RT
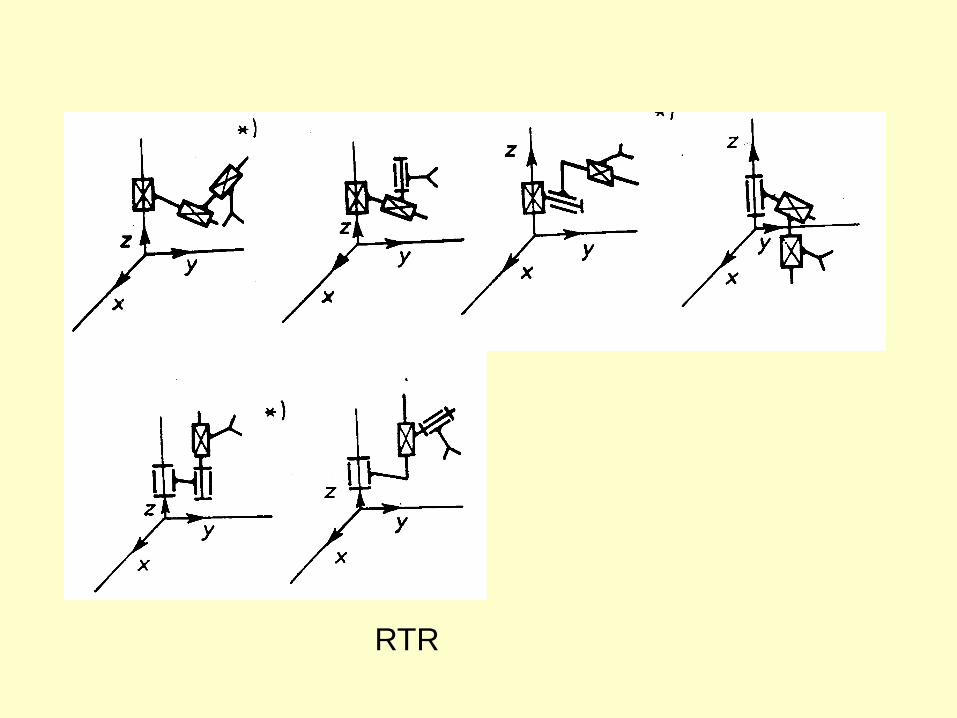
RTR
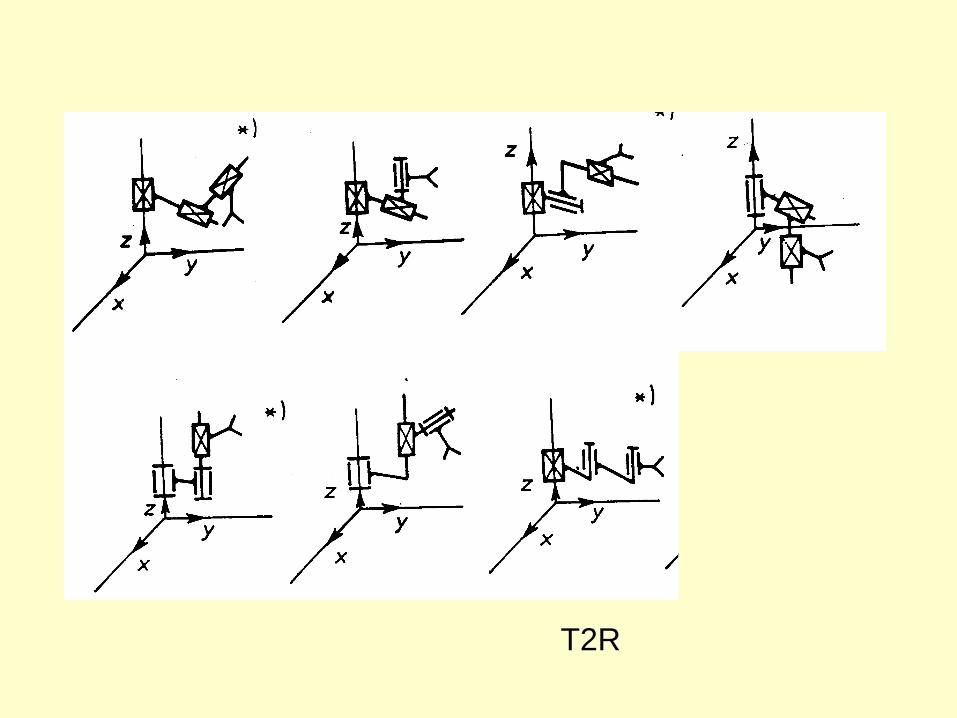
T2R

3R

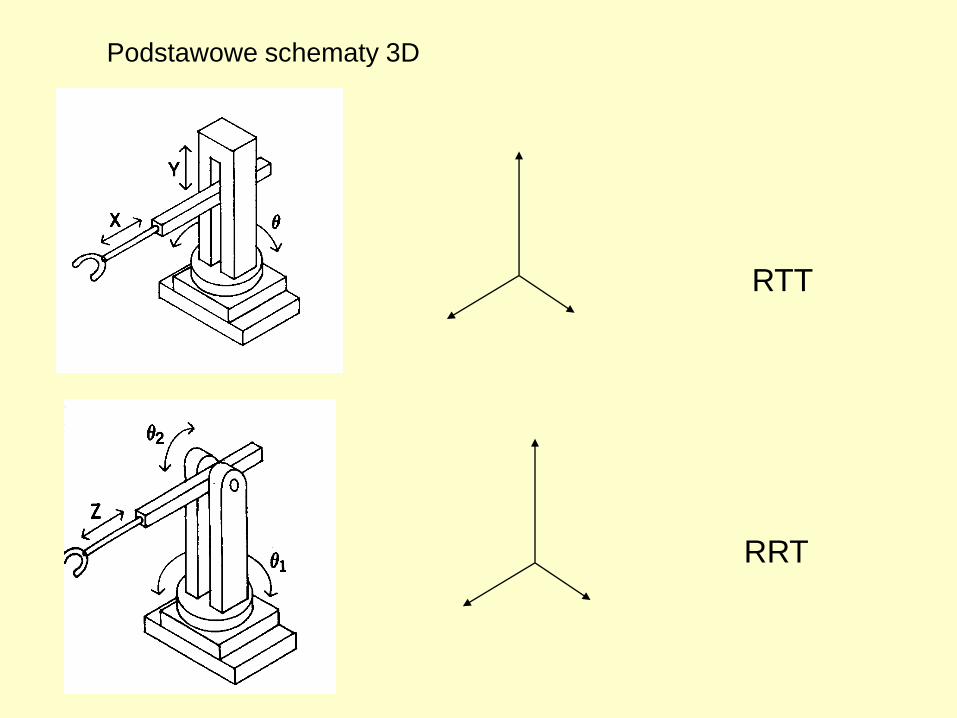
Podstawowe schematy 3D
TTT
Podstawowe schematy 3D
RTT
RRT
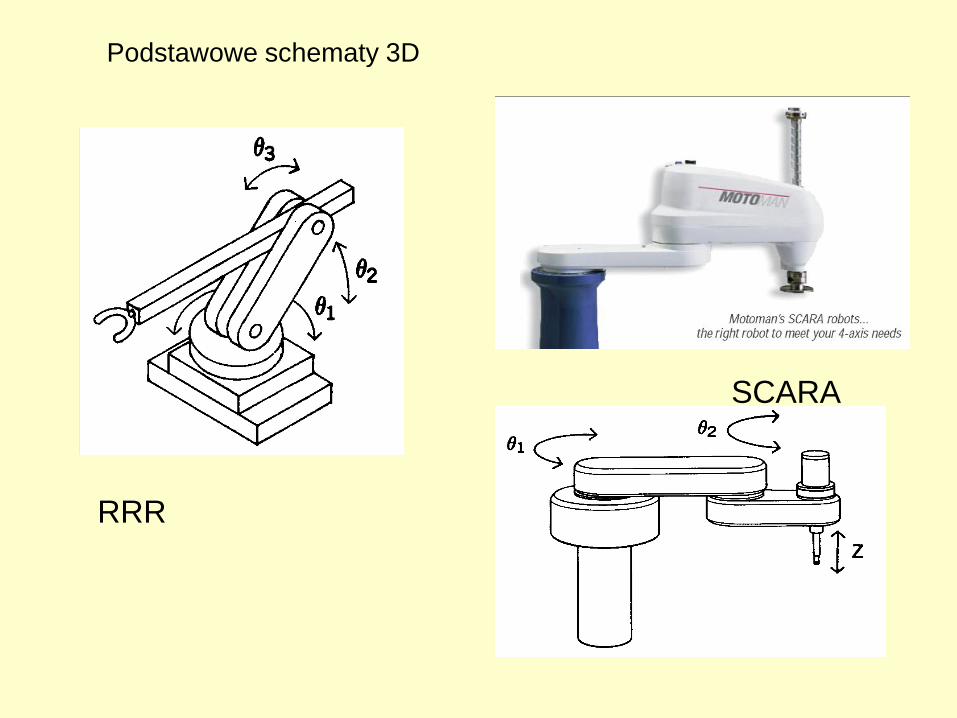
Podstawowe schematy 3D
SCARA
RRR
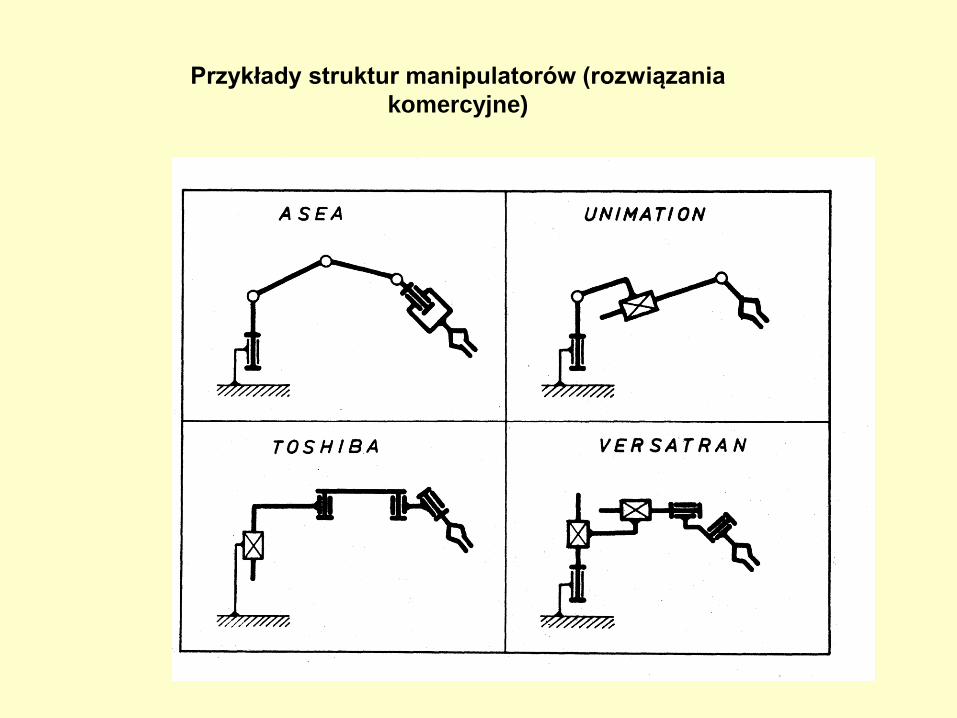
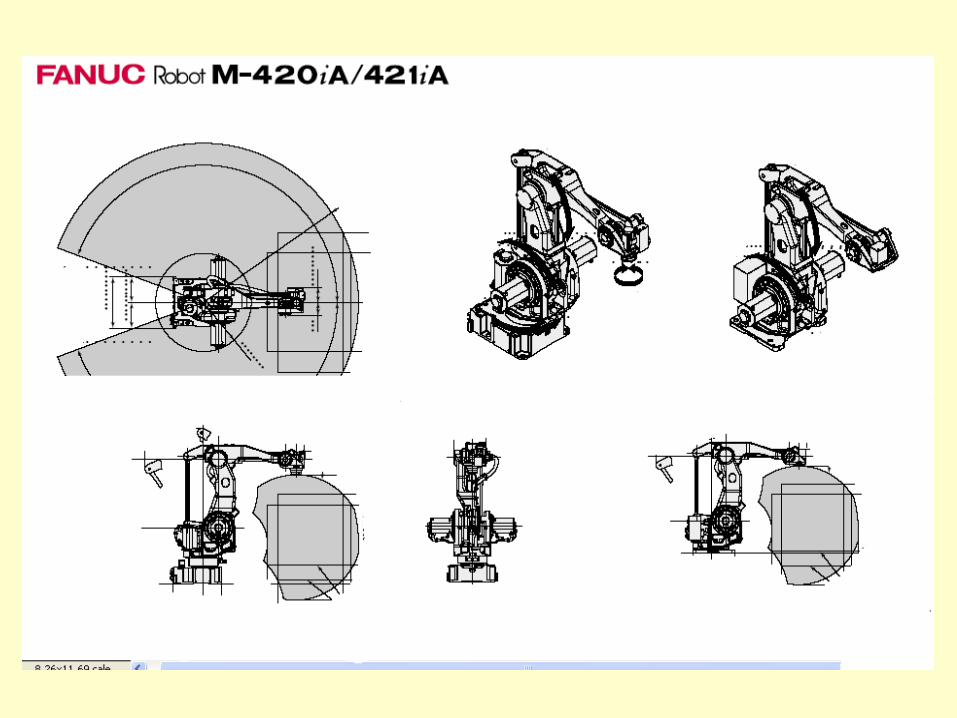
Przykłady struktur manipulatorów (rozwiązania
komercyjne)

Manipulatory - udźwig
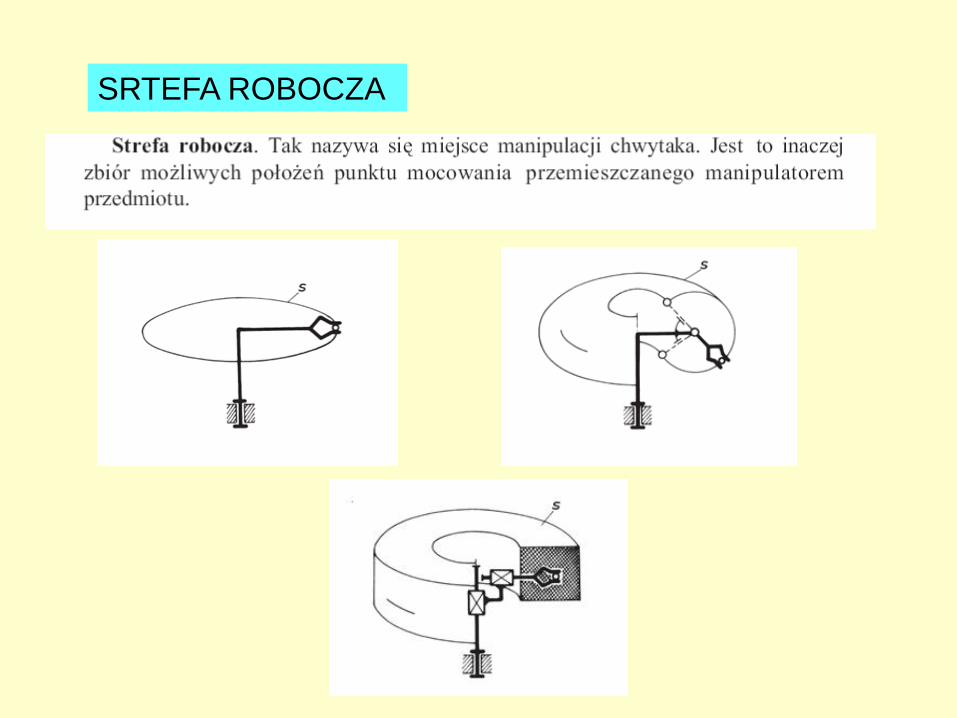
SRTEFA ROBOCZA
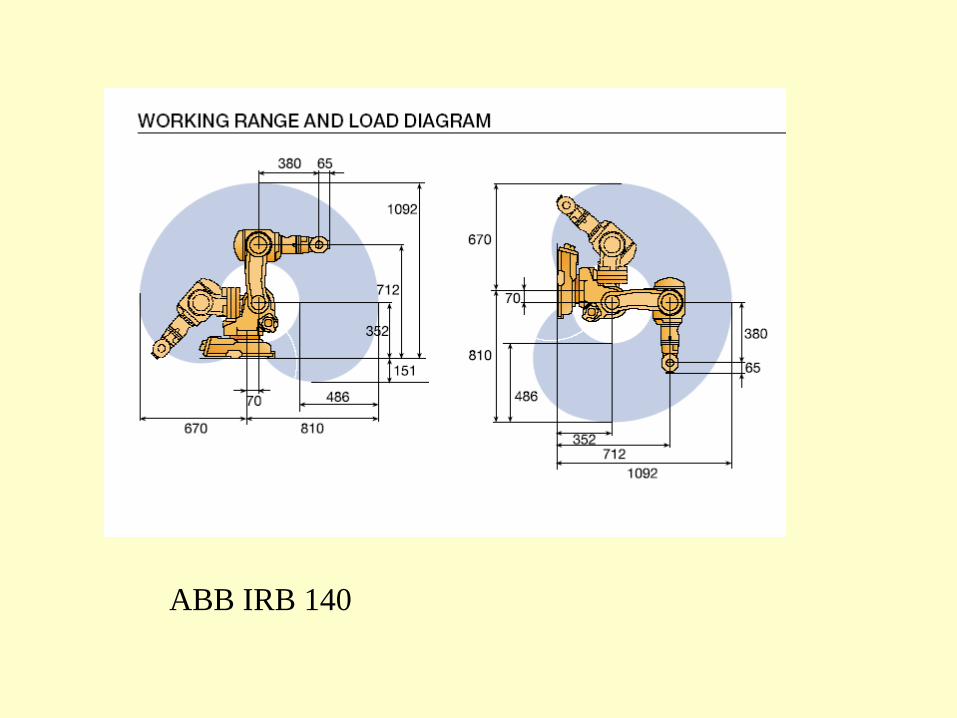
ABB IRB 140
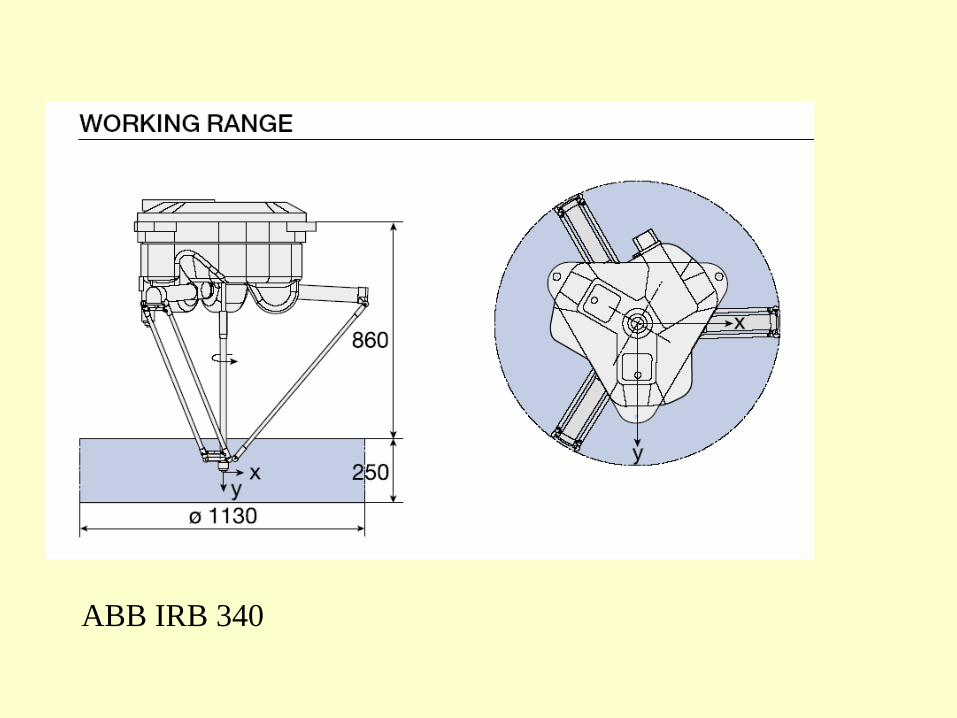
ABB IRB 340
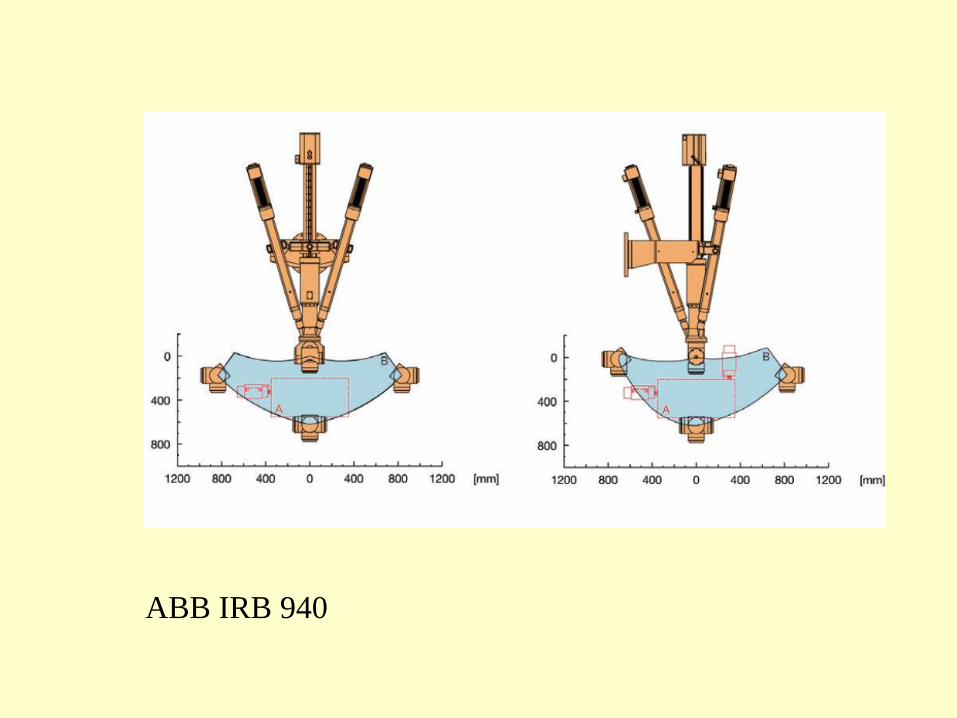
ABB IRB 940
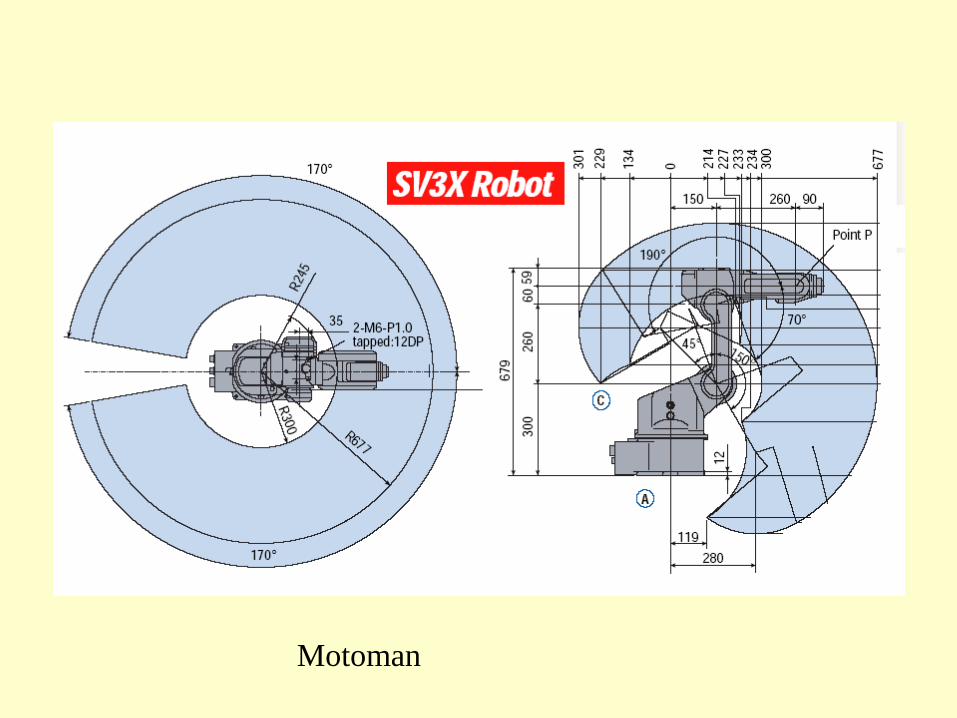
Motoman

Kąt i współczynnik serwisu
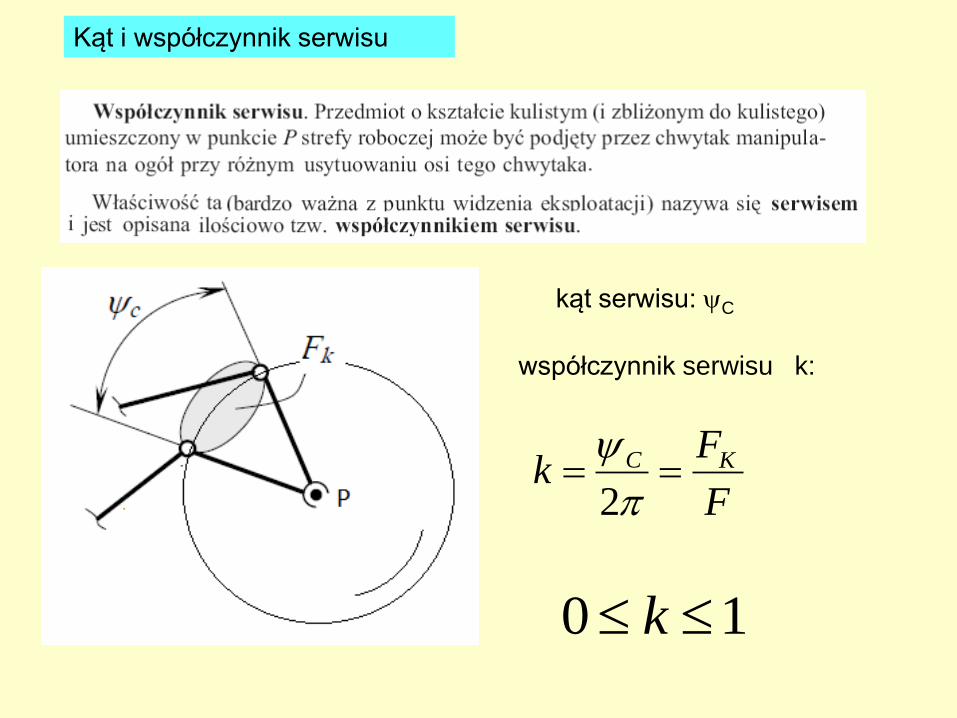
Kąt i współczynnik serwisu
kąt serwisu: C
współczynnik serwisu k:
F
Fk KC
2
10 k
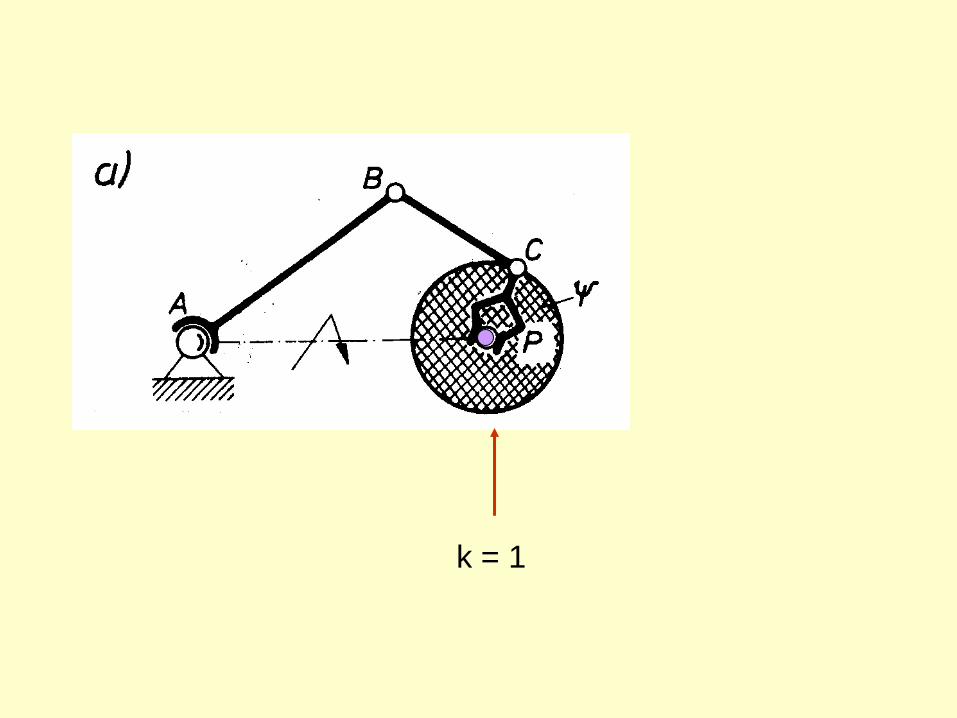
k = 1
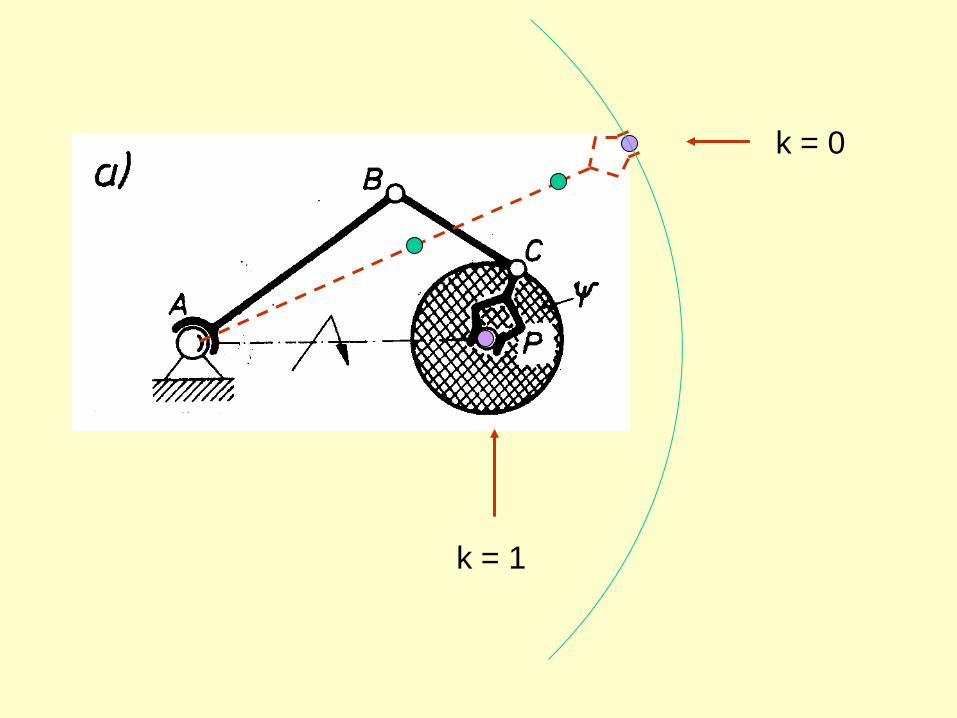
k = 1
k = 0

n = 4
p1 = 3
p2 = 0
n = 5
p1 = 4
p2 = 0
W = 3(n-1) - 2p1 - p2
W = 3 W = 4
M = 3(n-1-1) - 2p1 - p2
Manewrowość (redundancja)
M = 0 M = 1
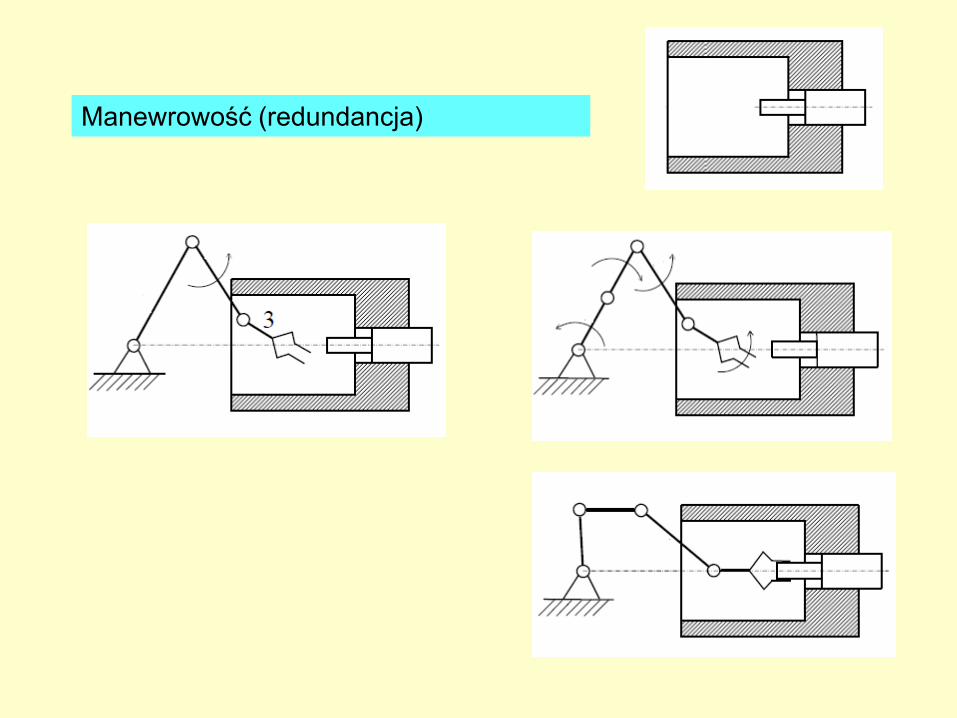
Manewrowość (redundancja)
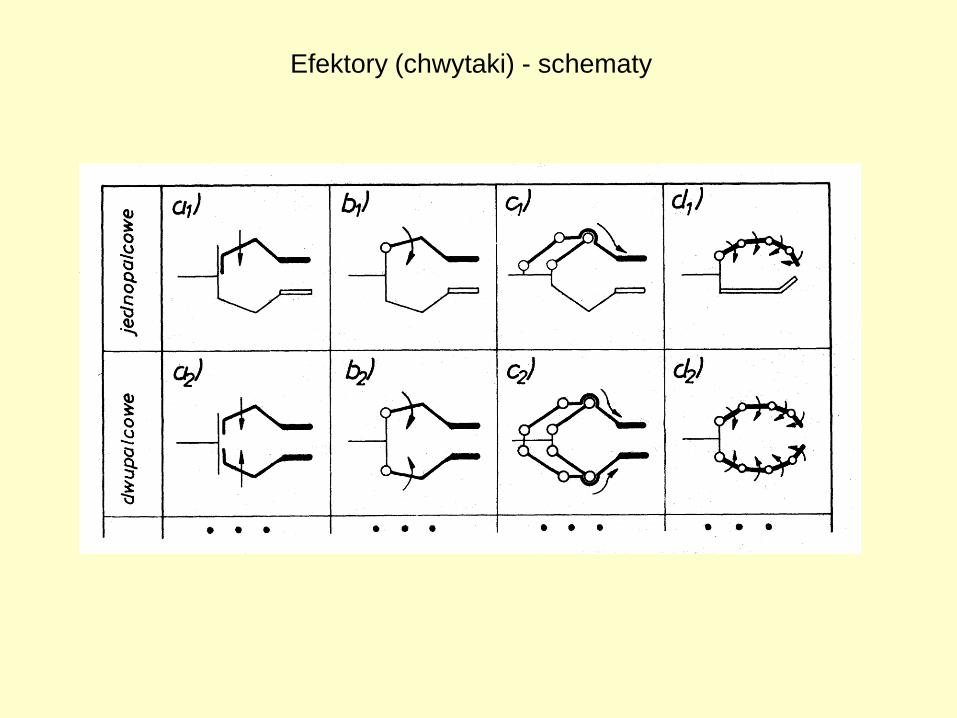
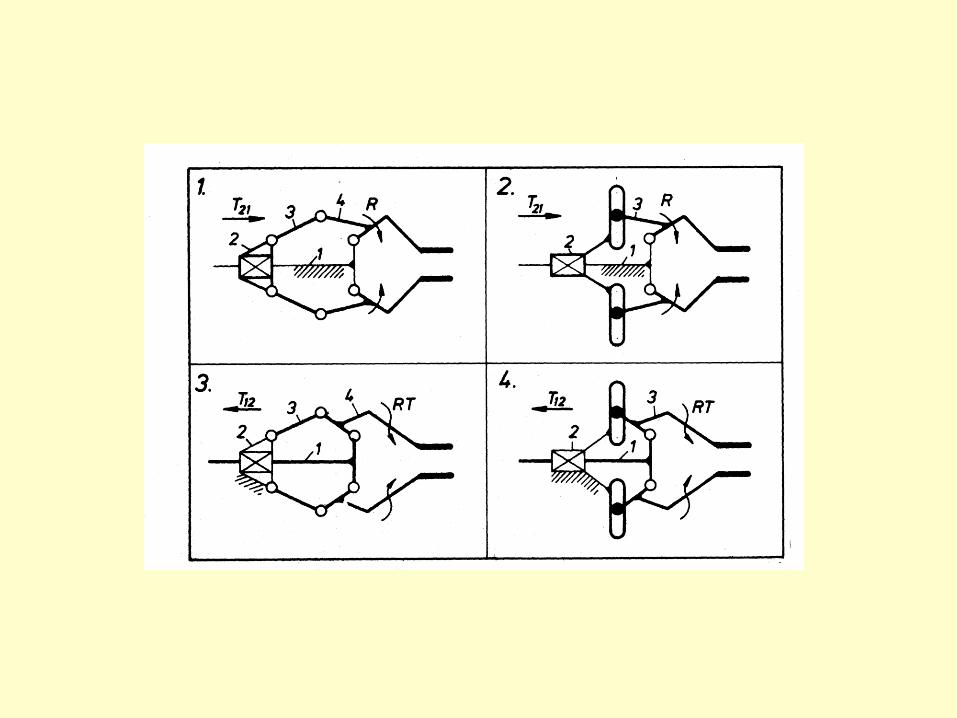
Efektory (chwytaki) - schematy
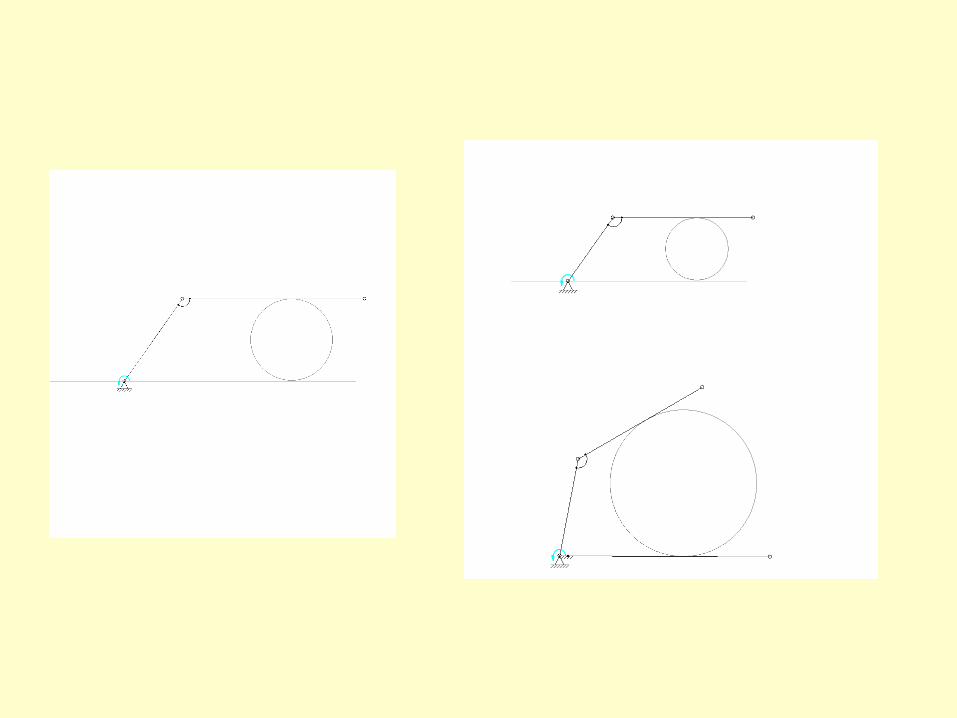
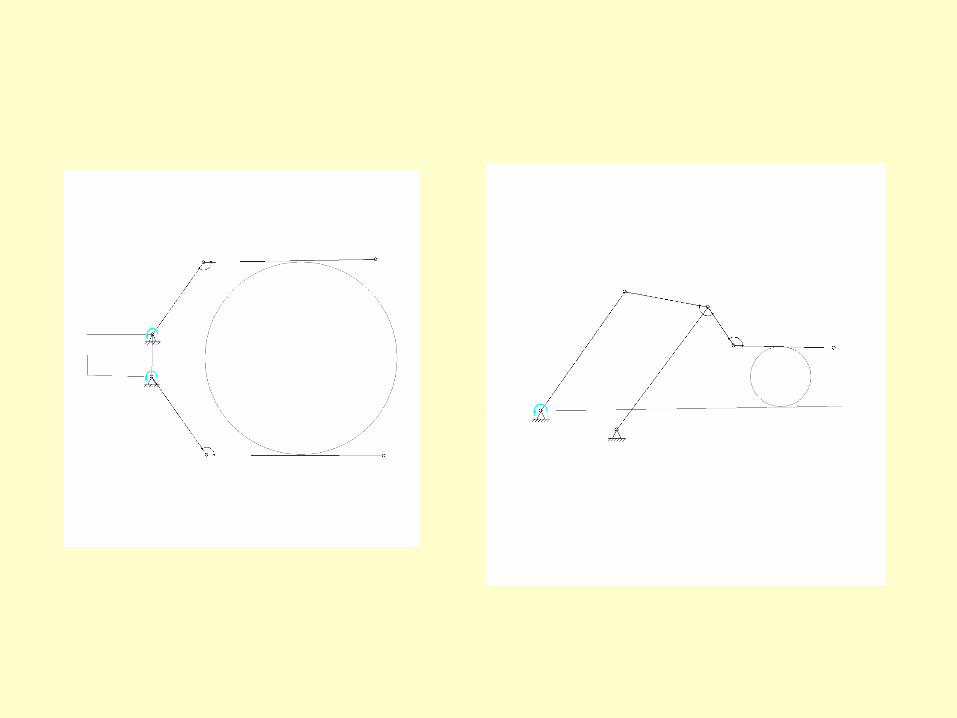
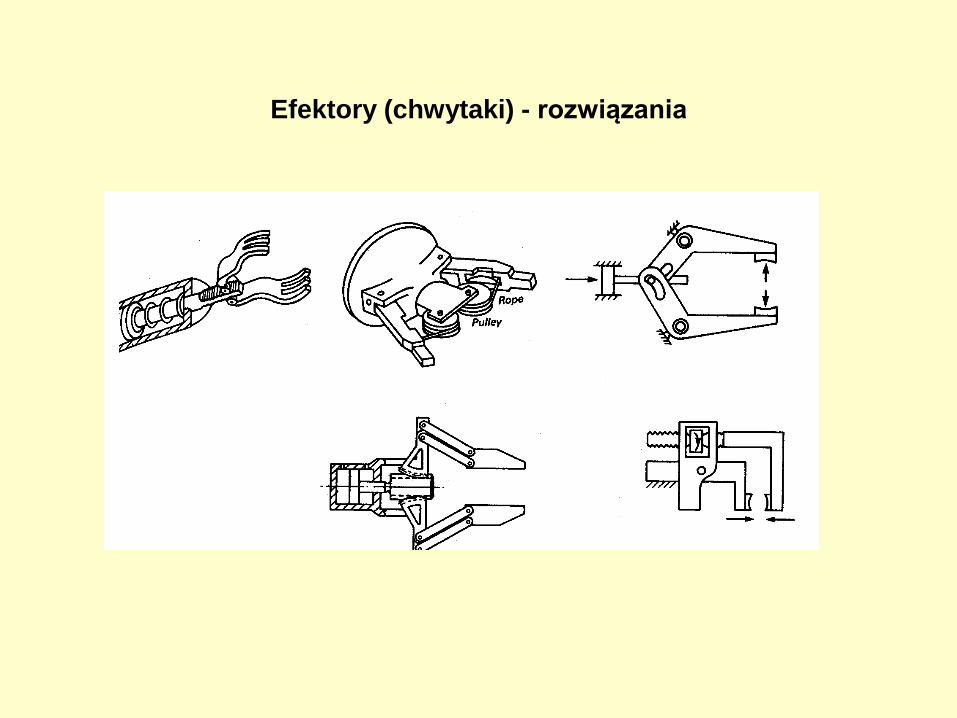
Efektory (chwytaki) - rozwiązania

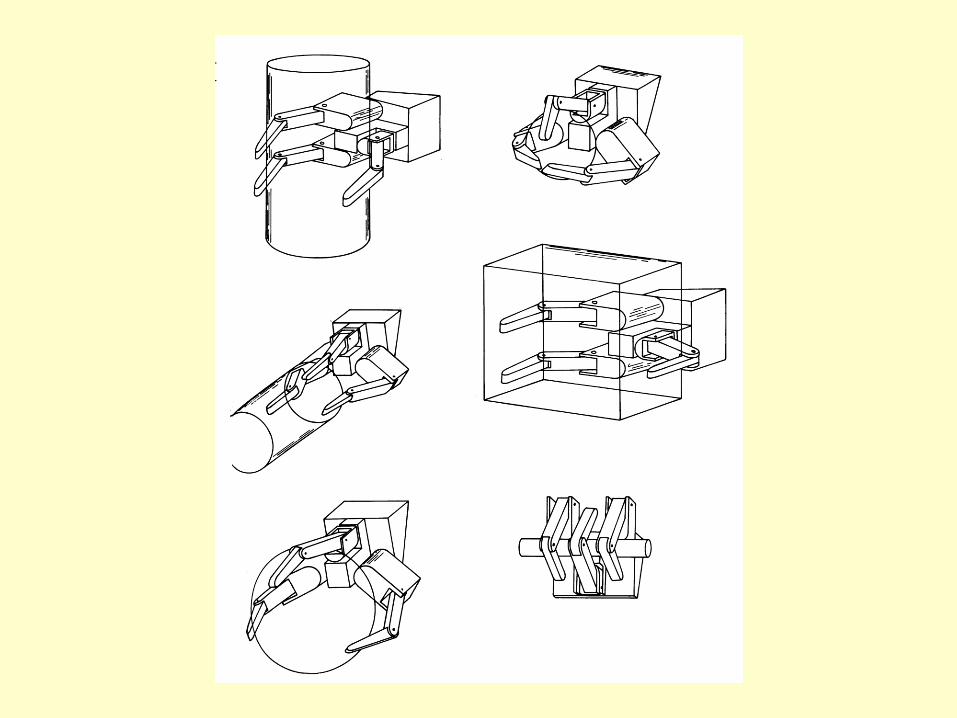
Efektory (chwytaki) – trzy palce
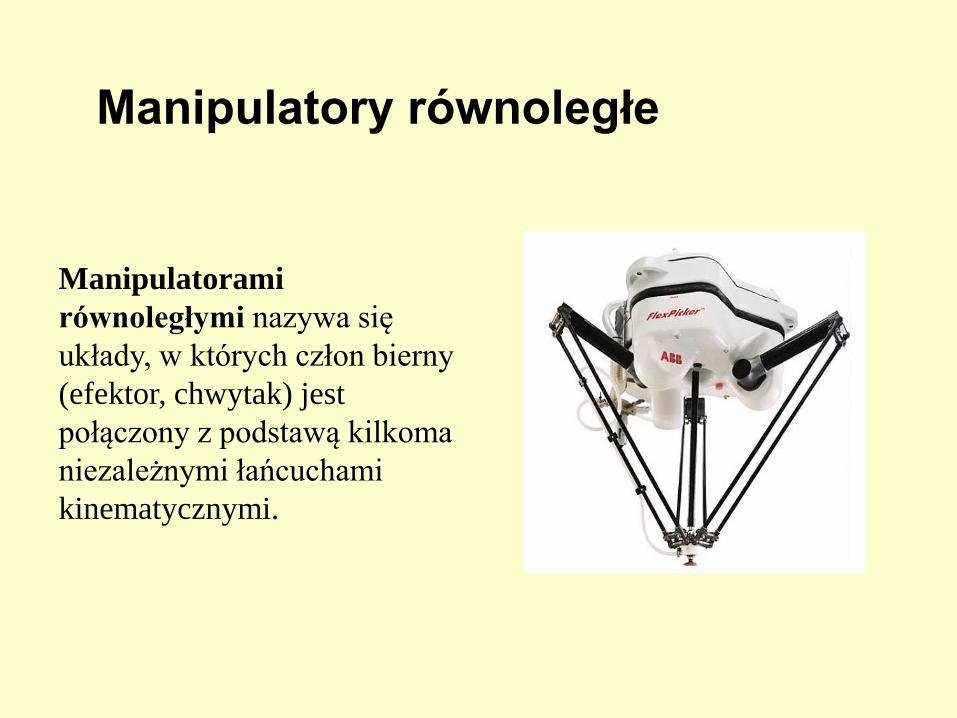
Manipulatory równoległe
Manipulatorami
równoległymi nazywa się
układy, w których człon bierny
(efektor, chwytak) jest
połączony z podstawą kilkoma
niezależnymi łańcuchami
kinematycznymi.
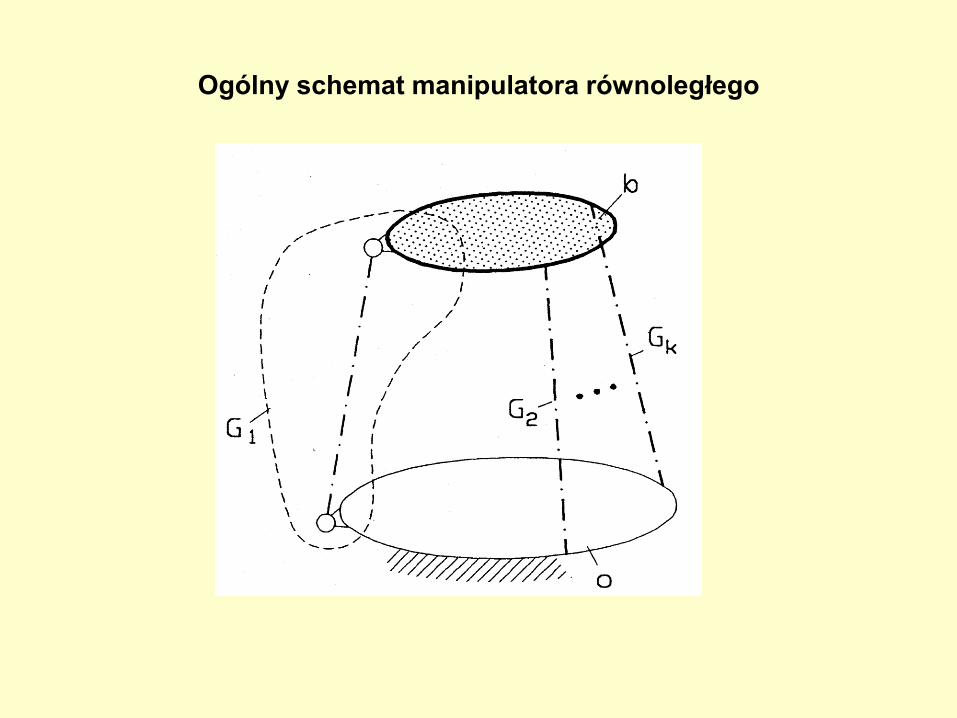
Ogólny schemat manipulatora równoległego
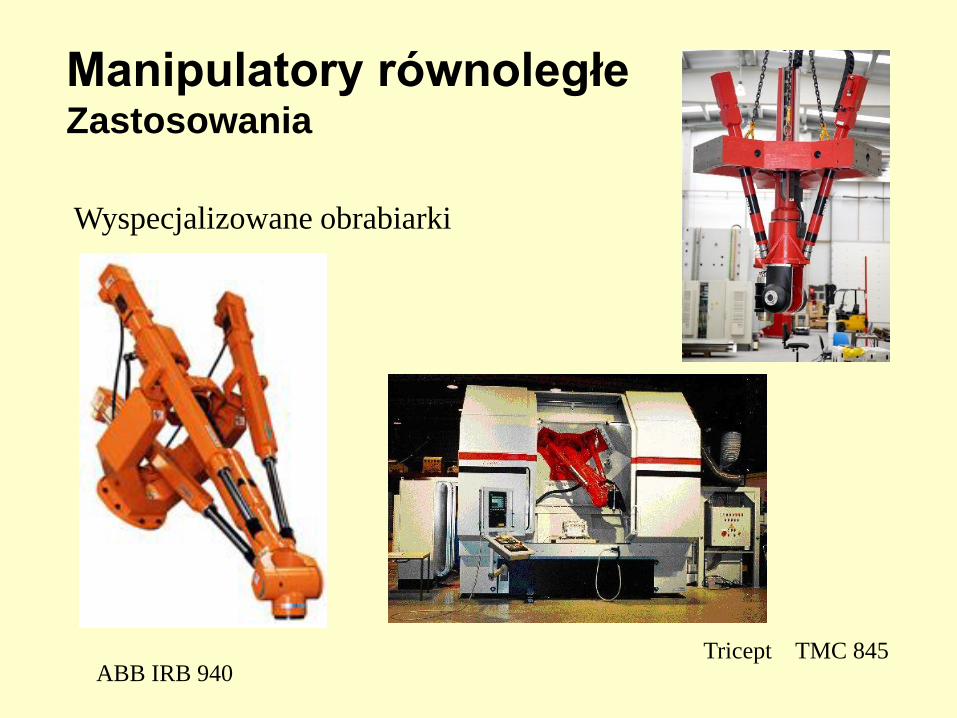
Manipulatory równoległe Zastosowania
Wyspecjalizowane obrabiarki
Tricept TMC 845 ABB IRB 940
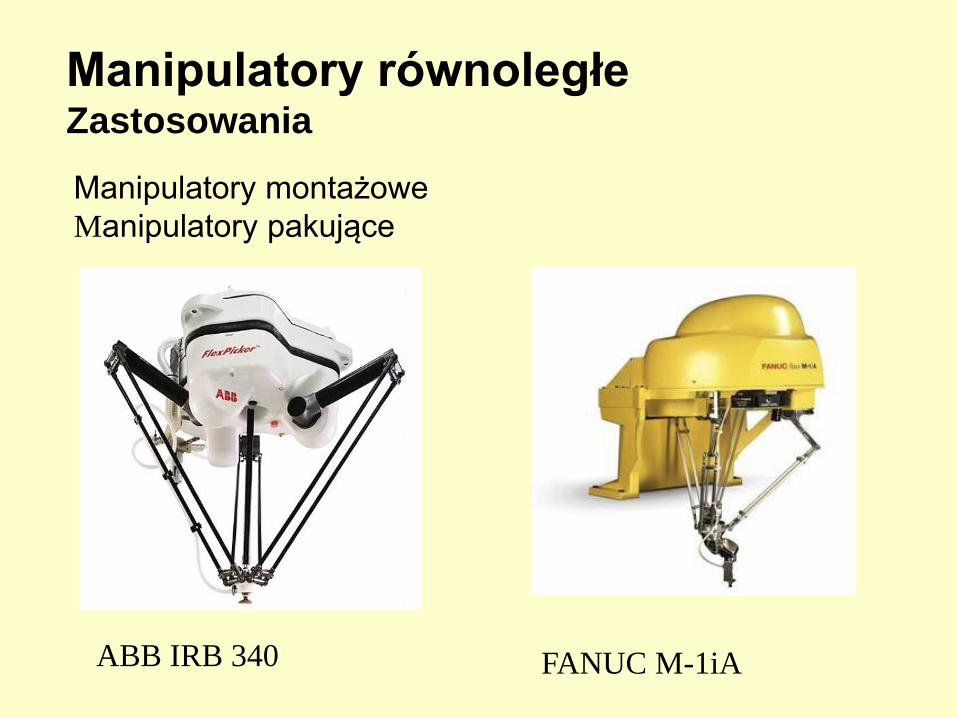
Manipulatory równoległe Zastosowania
Manipulatory montażowe
Manipulatory pakujące
ABB IRB 340 FANUC M-1iA
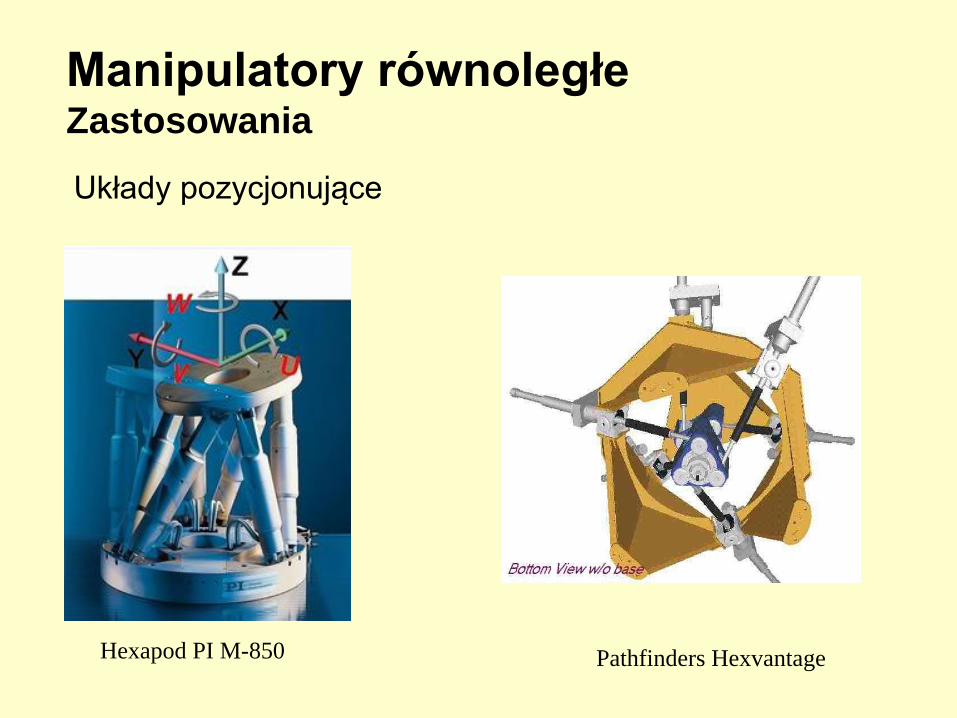
Manipulatory równoległe Zastosowania
Układy pozycjonujące
Hexapod PI M-850 Pathfinders Hexvantage
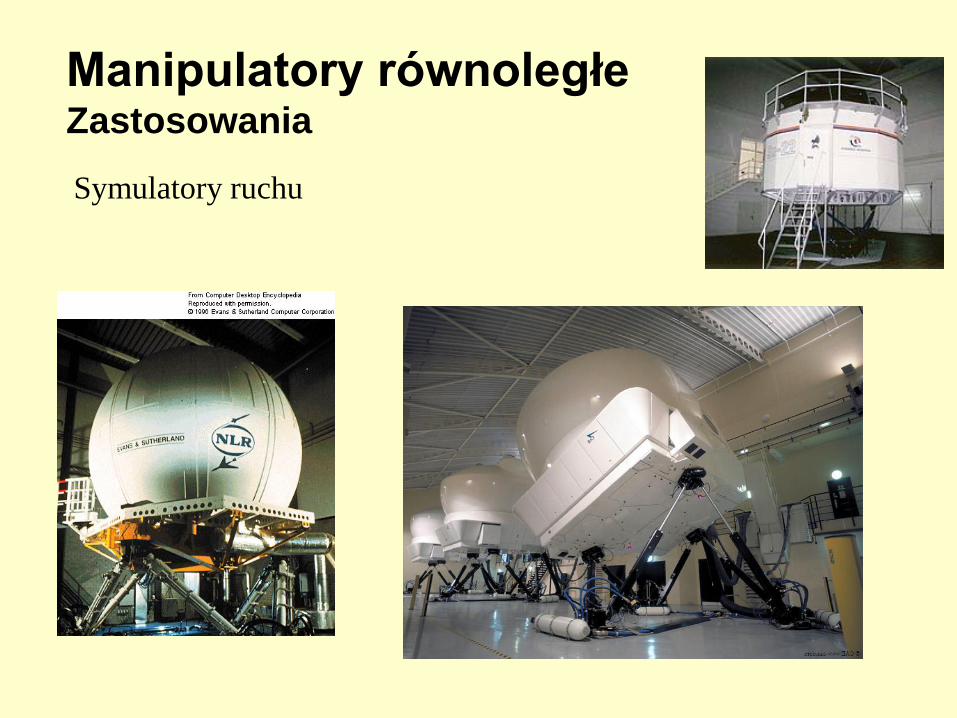
Manipulatory równoległe Zastosowania
Symulatory ruchu
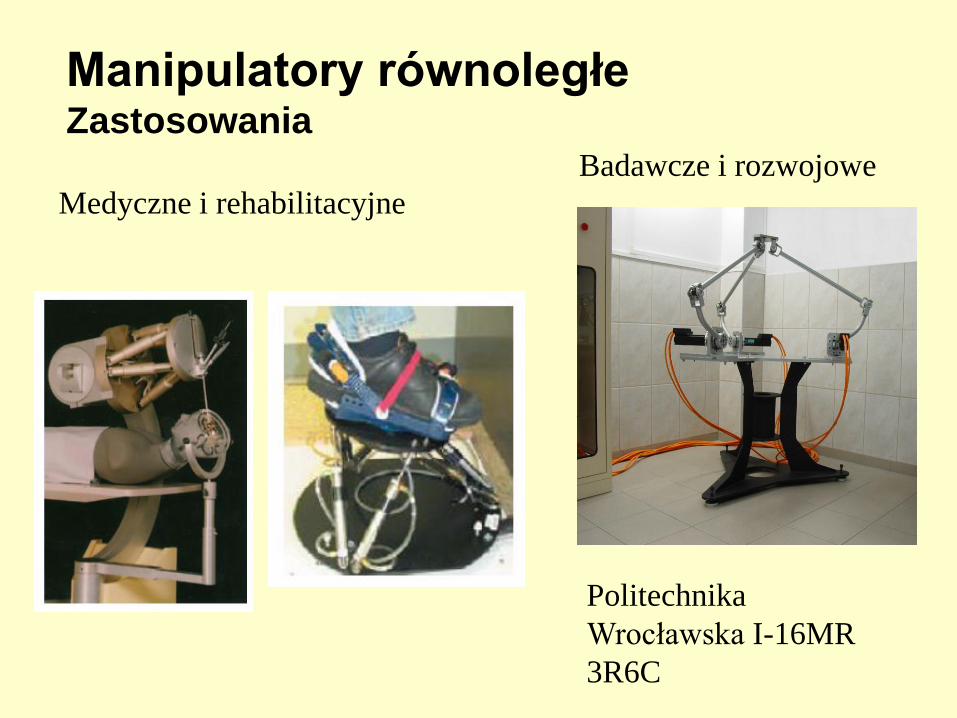
Manipulatory równoległe Zastosowania
Badawcze i rozwojowe
Politechnika
Wrocławska I-16MR
3R6C
Medyczne i rehabilitacyjne
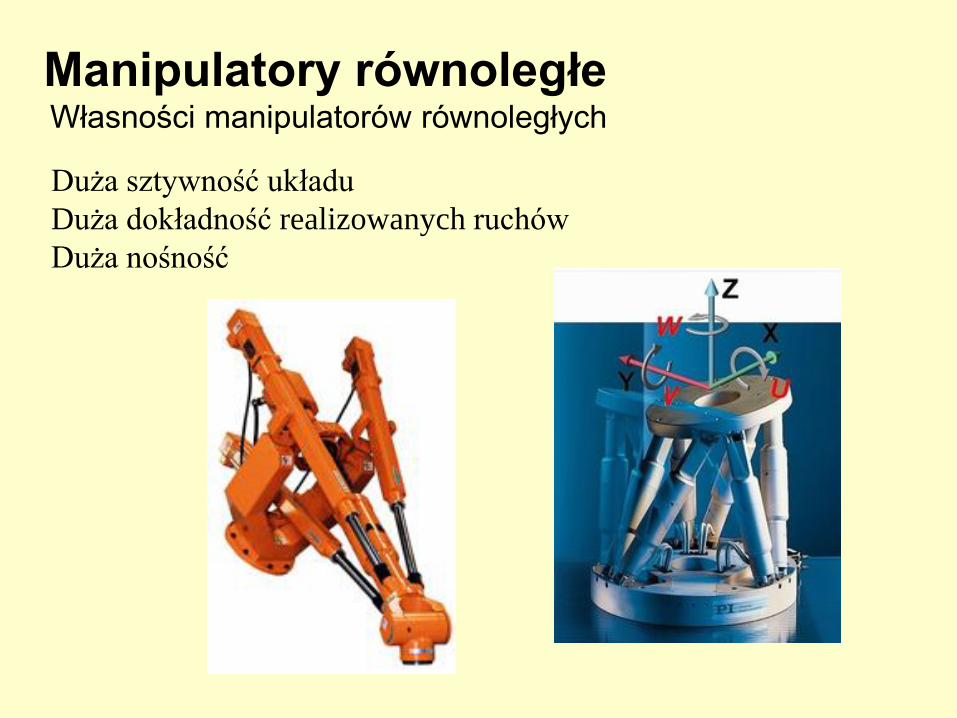
Manipulatory równoległe Własności manipulatorów równoległych
Duża sztywność układu
Duża dokładność realizowanych ruchów
Duża nośność
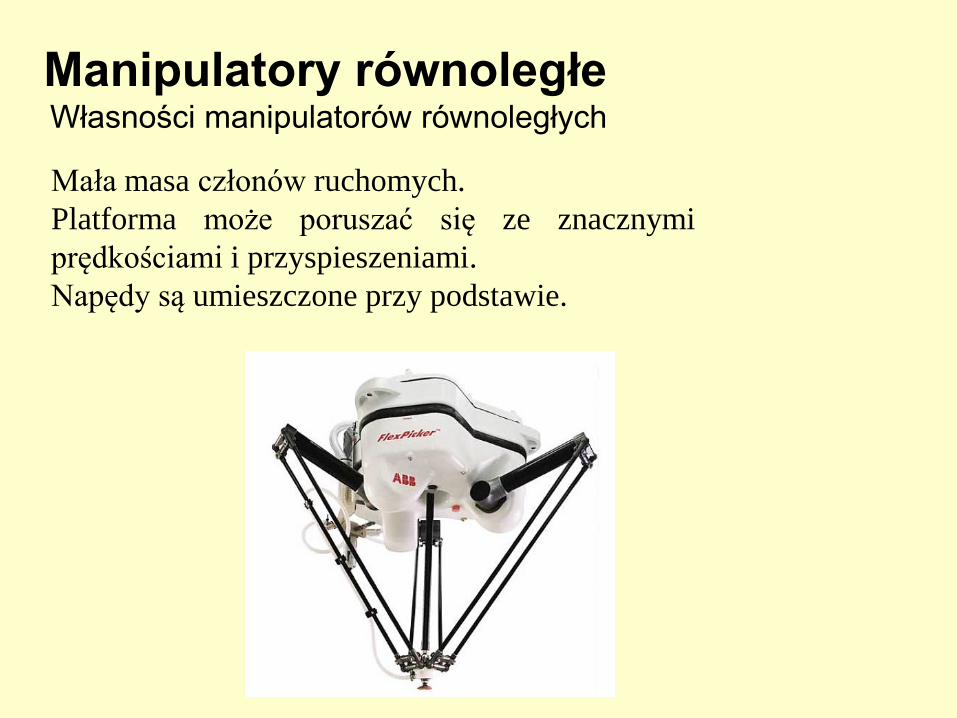
Manipulatory równoległe Własności manipulatorów równoległych
Mała masa członów ruchomych.
Platforma może poruszać się ze znacznymi
prędkościami i przyspieszeniami.
Napędy są umieszczone przy podstawie.
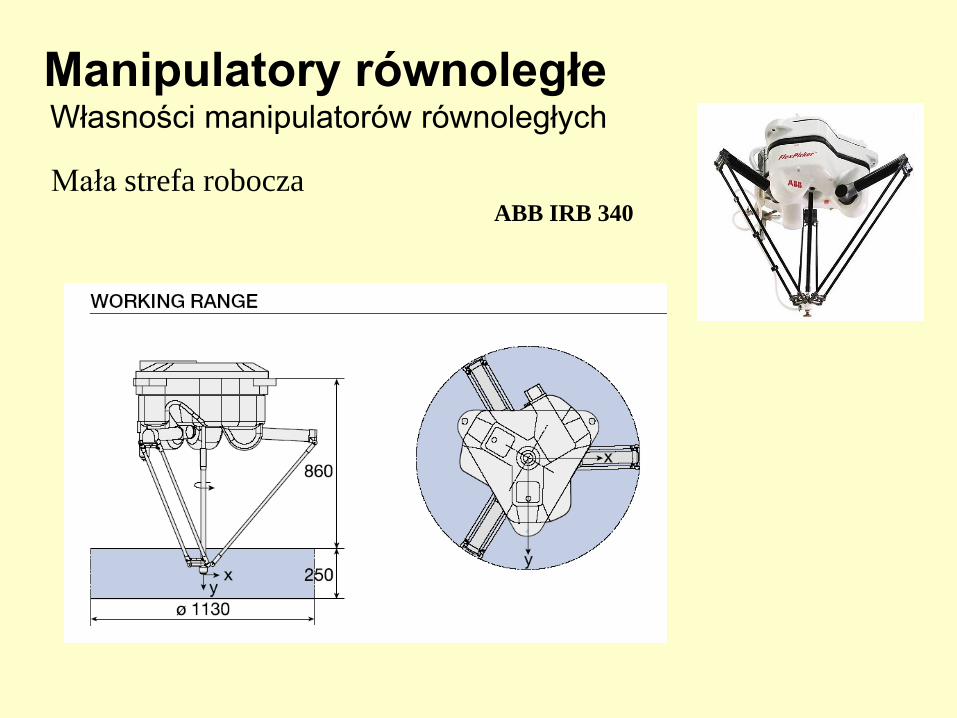
Manipulatory równoległe Własności manipulatorów równoległych
Mała strefa robocza ABB IRB 340
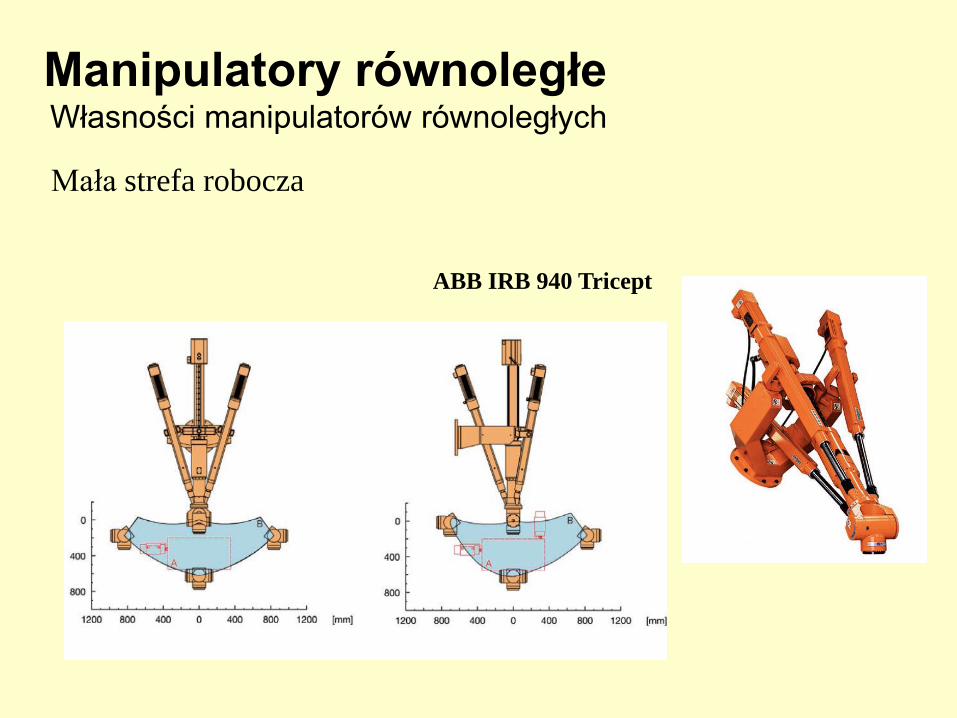
Manipulatory równoległe Własności manipulatorów równoległych
Mała strefa robocza
ABB IRB 940 Tricept

Manipulatory równoległe Własności manipulatorów równoległych
Mała strefa robocza
FANUC F200
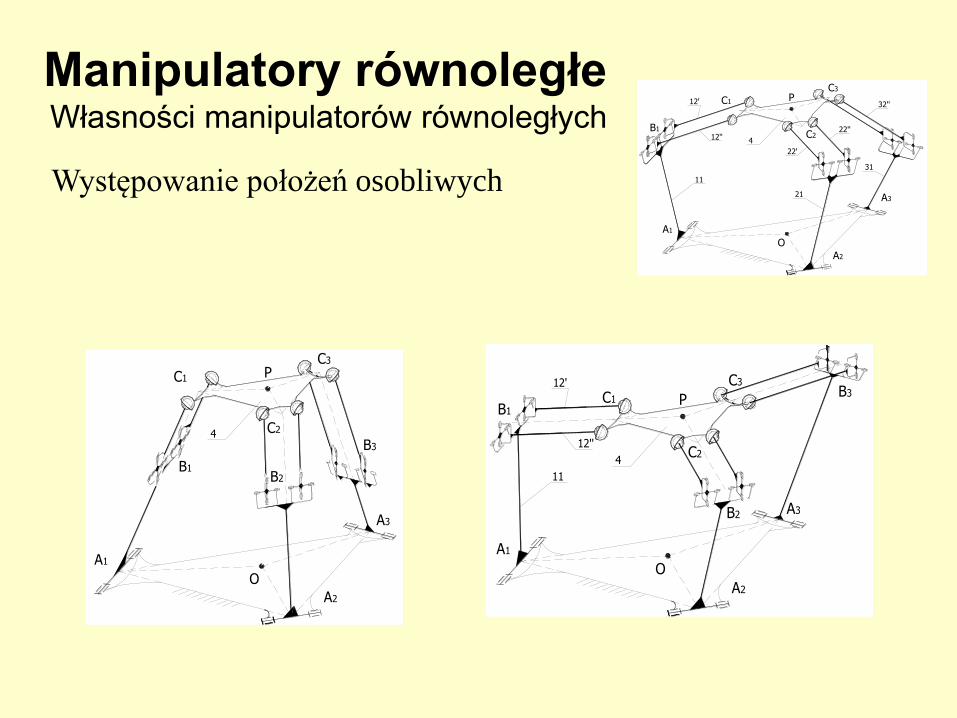
Manipulatory równoległe Własności manipulatorów równoległych
Występowanie położeń osobliwych A3
C3
C1
C2B1
A2
A1
11
12'
4
21
O
P
31
22'
32''
22''12''
A3
A2
A1
O
P
B1
C3
C24
C1
B2
B3
A3
B3
B2
A2
A1
O
PC1C3
C2
B1
12''
12'
11
4
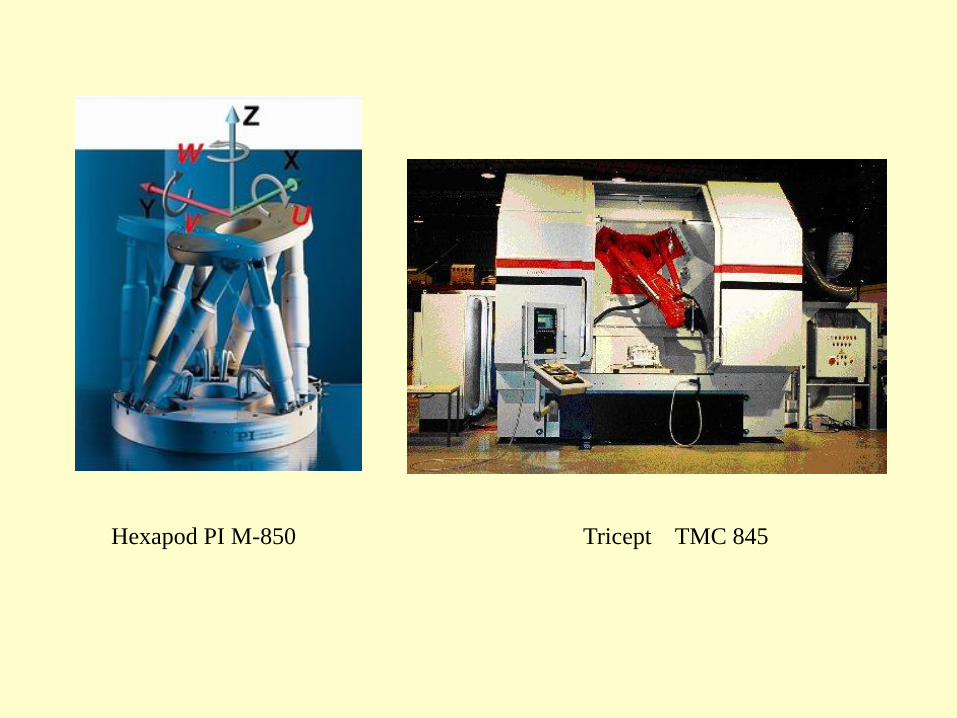
Hexapod PI M-850 Tricept TMC 845
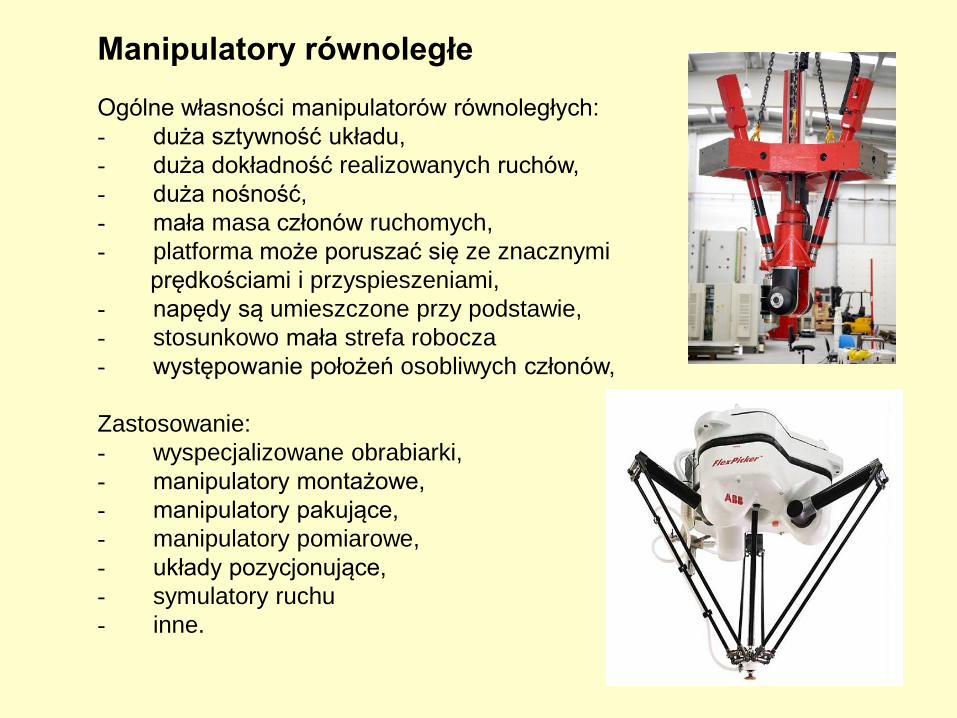
Manipulatory równoległe
Ogólne własności manipulatorów równoległych:
- duża sztywność układu,
- duża dokładność realizowanych ruchów,
- duża nośność,
- mała masa członów ruchomych,
- platforma może poruszać się ze znacznymi
prędkościami i przyspieszeniami,
- napędy są umieszczone przy podstawie,
- stosunkowo mała strefa robocza
- występowanie położeń osobliwych członów,
Zastosowanie:
- wyspecjalizowane obrabiarki,
- manipulatory montażowe,
- manipulatory pakujące,
- manipulatory pomiarowe,
- układy pozycjonujące,
- symulatory ruchu
- inne.
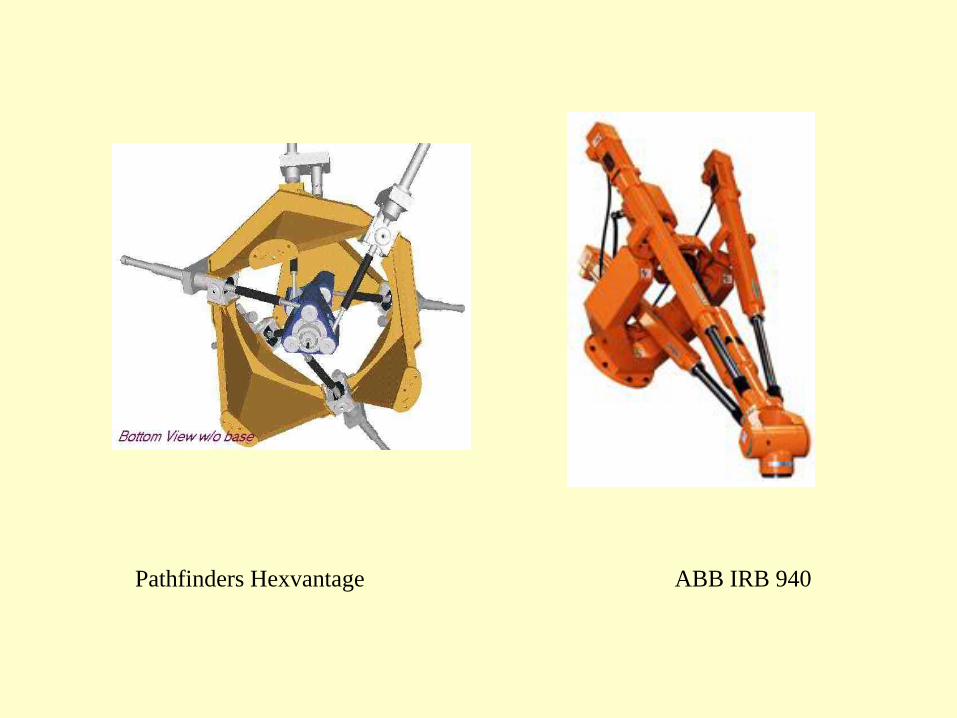
Pathfinders Hexvantage ABB IRB 940
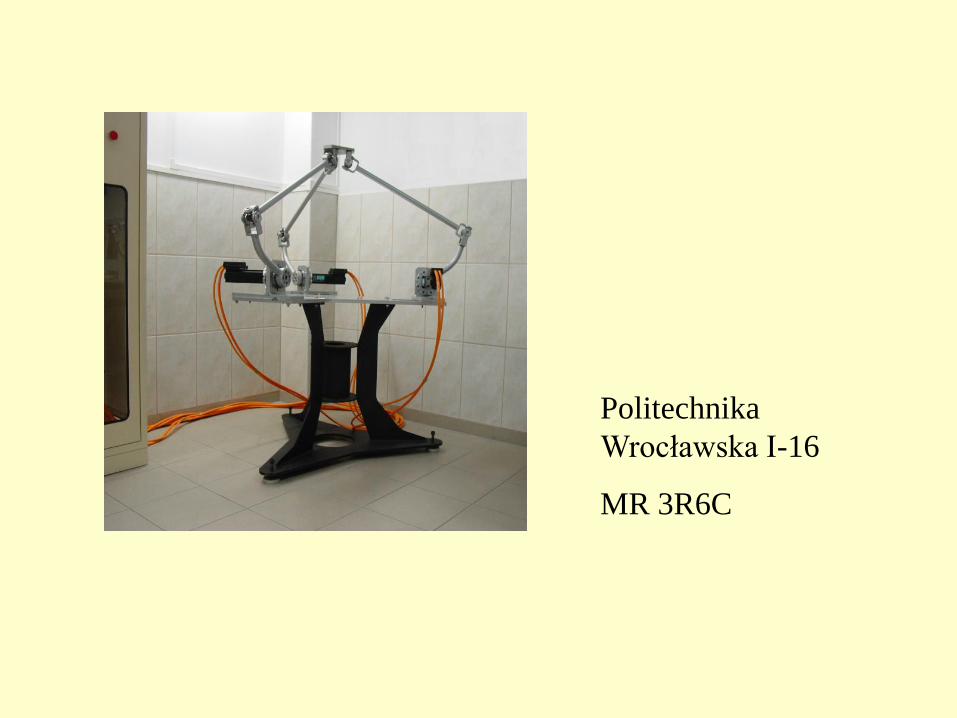
Politechnika
Wrocławska I-16
MR 3R6C
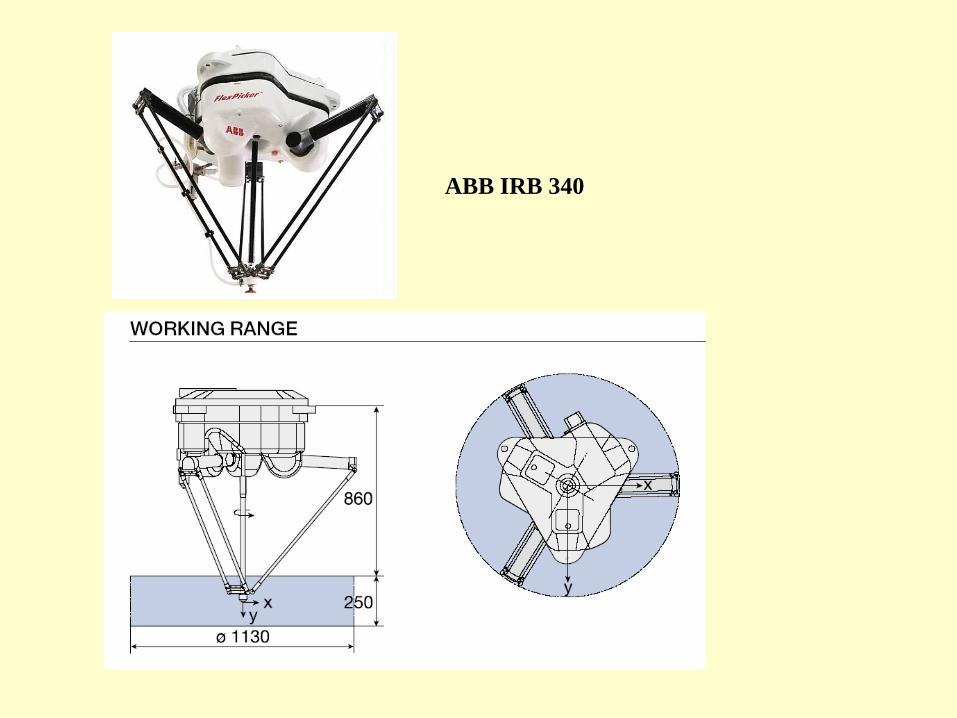
ABB IRB 340
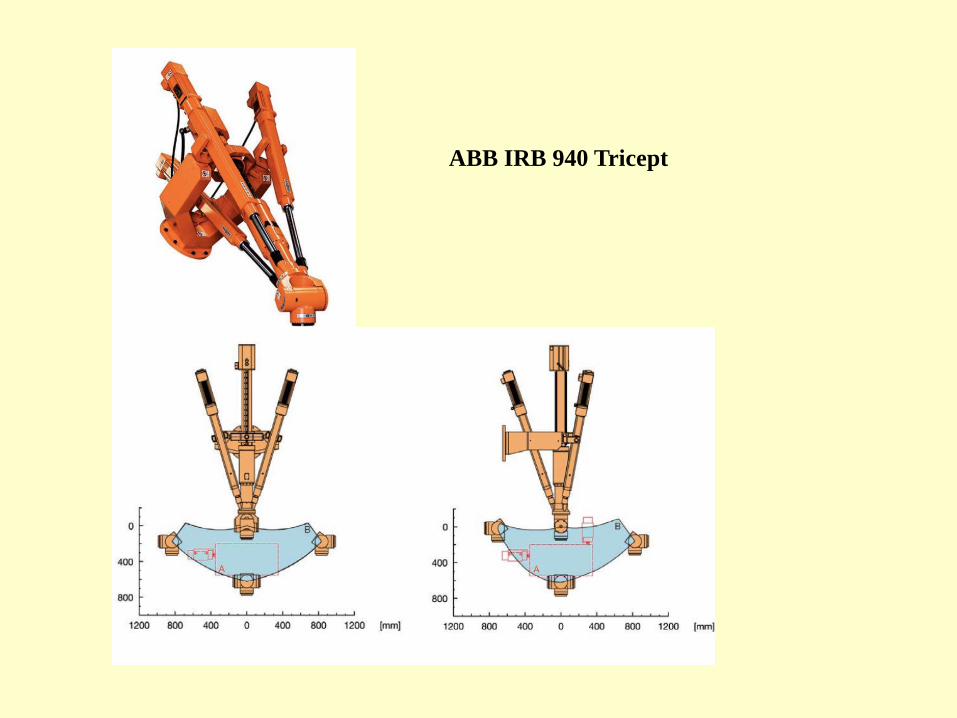
ABB IRB 940 Tricept
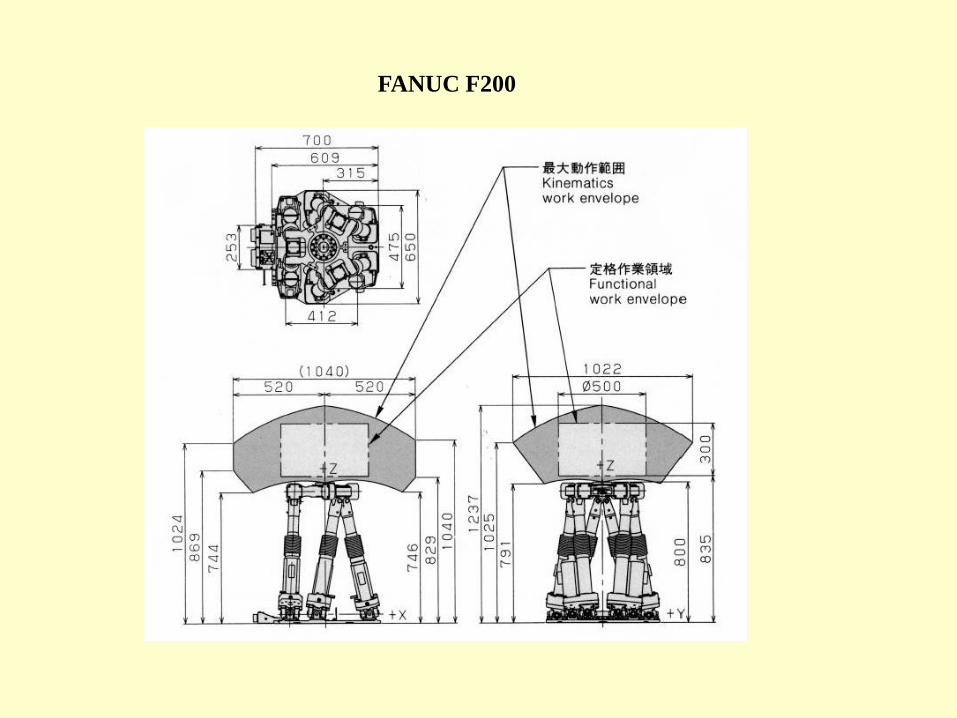
FANUC F200
Copyright © 2022 FDOKUMEN

