







Bahasa
Halaman
Hukum


Laporan Tugas Akhir BAB II
STT Telematika Telkom Purwokerto 6 D310008
BAB II
DASAR TEORI
Pada bab II ini menjelaskan tentang teori dasar yang menunjang tugas akhir yang
meliputi perangkat keras maupun perangkat lunak yang digunakan seperti mikrokontroler
ATMega 8, sensor cahaya Light Dependent Resistor (LDR), motor DC dan teori lainnya
yang mendukung dalam melakukan perancangan dan pembuatan simulasi alat pendeteksi
hujan dengan report Short Message Service (SMS) ini seperti sistem komunikasi Global
System for Mobile Communication (GSM) terutama yang berkaitan dengan pengiriman
Short Message Service (SMS).
2.1 GLOBAL SYSTEM FOR MOBILE COMMUNICATION (GSM)[11]
Global System For Mobile Communication (GSM) adalah Teknologi yang
memanfaatkan gelombang mikro dan pengiriman sinyal yang terbagi berdasarkan
waktu tertentu, sehingga sinyal informasi yang dikirim akan sampai pada tujuan.
GSM juga teknologi selular yang banyak digunakan orang di seluruh dunia.
Kemajuan teknologi telekomunikasi khususnya telekomunikasi selular yang sangat
pesat menuntut peningkatan layanan komunikasi. Kemajuan tersebut juga merupakan
gambaran semakin meningkatnya aktivitas dan mobilitas komunikasi masyarakat
baik secara kuantitas maupun kualitas.
2.1.1 Alokasi Frekuensi Operator GSM di Indonesia[11]
Alokasi frekuensi Global System For Mobile Communication (GSM) yang
banyak dipakai di Indonesia yaitu pada pita 900 MHz, dan 1800 MHz. Kedua alokasi
frekuensi ini memiliki frekuensi downlink dan uplink. Frekuensi downlink adalah
frekuensi yang dipancarkan oleh BTS-BTS untuk berkomunikasi dengan handphone
pelanggan dan juga menghasilkan apa yang disebut sebagai coverage footprint
operator sedangkan frekuensi uplink adalah frekuensi yang digunakan oleh
handphone-handphone pelanggan agar bisa terhubung ke jaringan.
Di Indonesia, ada lima operator GSM (Telkomsel, Indosat, XL, Axis dan
Three) yang memiliki ijin operasi. Pada gambar 2.1 dapat dilihat berapa total alokasi

7 Laporan Tugas Akhir BAB II
STT Telematika Telkom Purwokerto D310008
frekuensi dari setiap operator GSM. Pada frekuensi GSM 900, hanya terdapat tiga
operator yaitu Telkomsel, Xl dan Indosat. Tetapi indosat lebih menguasai total
alokasi frekuensinya. Sementara pada frekuensi GSM 1800, terdapat lima operator
yaitu Telkomsel, Indosat, Xl, Three dan Axis. Telkomsel lebih menguasai total
alokasi frekuensinya dibandingkan dengan operator lain pada frekuensi GSM 1800.
Gambar 2.2 menunjukan total alokasi frekuensi yang dimiliki masing-masing
operator GSM di Indonesia. Terlihat bahwa Telkomsel dan Indosat memiliki jumlah
frekuensi terbanyak sedangkan Three paling sedikit.
Gambar 2.1 Alokasi Frekuensi Pita GSM 900 MHz di Indonesia [11]
Gambar 2.2 Alokasi Frekuensi Pita GSM 1800 MHz di Indonesia [11]
UPLINK
935 Mhz
DOWNLINK
10 MHZ
INDOSAT
7,5 Mhz
TELKOMSEL
7,5 Mhz
XL
952,5 Mhz 954 Mhz
10 MHZ
INDOSAT
7,5 Mhz
TELKOMSEL
7,5 Mhz
XL
952,5 Mhz 954 Mhz
960 Mhz
935 Mhz 960 Mhz
1717,5 1710 1722,5 1750 1765 1775 1730 1745
1880 1805
DOWNLINK
UPLINK
7,5Mhz
XL
7,5 Mhz
INDST
7,5Mhz
TSEL
7,5Mhz
AXIS
7,5Mhz
TSEL
7,5Mhz
INDST
7,5Mhz
TSEL
7,5 Mhz
THREE
7,5Mhz
XL
7,5 Mhz
INDST
7,5Mhz
TSEL
7,5Mhz
AXIS
7,5Mhz
TSEL
7,5Mhz
IDST
7,5Mhz
TSEL
7,5 Mhz
THREE
1812,5 1817,5 1845 1860 1870 1825 1840
8 Laporan Tugas Akhir BAB II
STT Telematika Telkom Purwokerto D310008
2.1.2 Prinsip kerja frekuensi GSM [11]
Global System For Mobile Communication (GSM) Telkomsel di Indonesia
berjalan di dua frekuensi yaitu 900 MHz dan 1800 MHz. Di frekuensi 900 MHz,
Nilai rentang frekuensi untuk tiap slotnya adalah sebesar 200 KHz. Kemudian kedua
sub-band tersebut dibagi lagi menjadi kanal-kanal, sebuah kanal pada satu sub-band
memiliki pasangan dengan sebuah kanal pada sub-band yang lain. Tiap sub-band
dibagi menjadi 124 kanal, yang kemudian masing-masing diberi nomor yang dikenal
sebagai Absolute Radio Frequency Channel Number (ARFCN). Jadi sebuah Mobile
Station (MS) yang dialokasikan pada sebuah Absolute Radio Frequency Channel
Number (ARFCN) akan beroperasi pada satu frekuensi untuk mengirim dan satu
frekuensi untuk menerima sinyal. Untuk Global System For Mobile Communication
(GSM), setiap kanal ARFCN terdiri dari sepasang frekuensi yaitu frekuensi uplink
dan downlink yang digunakan untuk mengirim dan menerima informasi antara
Mobile Station (MS) dan Base Transceiver Controler (BTS). Pada setiap kanal
Absolute Radio Frequency Channel Number (ARFCN) antara frekuensi uplink dan
downlink dipisahkan oleh lebar pita frekuensi sebesar 45 MHz dengan tujuan untuk
menghindari interferensi.
Untuk meningkatkan kapasitas kanal GSM, maka digunakan frekuensi selain
900 MHz, yaitu frekuensi 1800 MHz. Penggunaan frekuensi ini akan meningkatkan
kemampuan untuk melayani pelanggan Global System For Mobile Communication
(GSM) tetapi memiliki sisi negatif karena daerah cakupan suatu Base Transceiver
Controler (BTS) akan menjadi semakin sempit. Hal ini dikarenakan oleh pengaruh
penggunaan frekuensi yang lebih tinggi dibandingkan dengan frekuensi 900 MHz
tersebut. GSM di frekuensi 1800 MHz biasa dikenal sebagai Digital Celluler System
(DCS) 1800. Pada DCS 1800, ada 374 kanal frekuensi pembawa yang dapat
digunakan untuk melayani pelanggan GSM. Pada tabel 2.1 merupakan tabel
perbandingan antara frekuensi 900 MHz dan 1800 MHz.

9 Laporan Tugas Akhir BAB II
STT Telematika Telkom Purwokerto D310008
Tabel 2.1 Perbandingan pada frekuensi 900 MHz dan 1800 MHz [11]
2.1.3 Short Message Service (SMS)[13]
Short Message Service (SMS) adalah layanan wireless global yang
memungkinkan pengiriman data alphanumeric antara mobile subscriber dan
eksternal sistem sehingga Short Message Service (SMS) dapat diartikan merupakan
layanan teknologi Global System for Mobile Communication (GSM) yang dapat
mengirim dan menerima pesan-pesan singkat berupa text. Karakteristik dari layanan
Short Message Service (SMS) adalah active mobile handset artinya dapat menerima
dan mengirim pesan singkat setiap waktu. Di sisi lain Short Message Service (SMS)
merupakan layanan yang bersifat store dan forward dimana setiap Short Message
Service (SMS) tidak dikirim langsung dari pengirim ke penerima tetapi melalui
sebuah Short Message Service (SMS) center yang menangani dan mengatur pesan
tersebut. Berikut struktur dasar dari jaringan Short Message Service (SMS) yang
ditunjukan pada gambar 2.3.
Gambar 2.3 Struktur Dasar dari Sebuah Short Message Service (SMS)[13]
Keterangan Frekuensi 900
(MHz)
Frekuensi 1800
(MHz)
Lebar pita 25 75
Alokasi frekuensi uplink dan
downlink 45 95
Alokasi frekuensi uplink 890 – 915 1710 – 1785
Alokasi frekunsi downlink 935 -960 1805 – 1880
Total kanal 125 375

10 Laporan Tugas Akhir BAB II
STT Telematika Telkom Purwokerto D310008
Pada jaringan Short Message Service (SMS) yang ditunjukan pada gambar 2.3
terdiri dari dua bagian yaitu Transceiver dan Receiver. Bagian Transceiver sebagai
bagian pengirim Short Message Service (SMS) melalui Base Transceiver Controler
(BTS) yang selanjutnya data Short Message Service (SMS) tersebut akan dikirimkan
ke bagian Base Station Controler (BSC), identitas yang digunakan untuk mengirim
pesan singkat ditangani oleh bagian Short Messaging Entity (SME) kemudian data
Short Message Service (SMS) akan diterima oleh bagian yang disebut Short Message
Servie Center (SMSC) merupakan bagian yang berfungsi menerima pesan dan
melakukan forward ke alamat Mobile Station (MS) yang dituju.
SMS-Gateway yang terdiri dari bagian MSC/VLR yang berfungsi untuk
menerima pesan dari Short Message Servie Center (SMSC) dan bagian Gateway
Mobile Switching Center (GMSC) yang berfungsi untuk mencari alamat MS yang
akan dituju sebagai Receiver atau penerima Short Message Service (SMS). Setelah
melalui SMSC data SMS tersebut akan masuk pada bagian MSC/VLR yang berada
pada bagian Receiver. Kemudian data SMS tersebut akan diterima pada bagian Base
Station Controler (BSC) dan BTS yang selanjutnya akan dikirim pada bagian Mobile
Station (MS) yang berfungsi sebagai MS Receiver atau penerima Short Message
Service (SMS).
2.2 CATU DAYA[13]
Merupakan bagian yang terpenting pada suatu rangkaian karena fungsinya
sebagai sumber energi dalam rangkaian. Semua rangkaian elektronika membutuhkan
sumber tegangan DC (Direct Current) untuk beroperasi sedangkan dalam kehidupan
sehari -hari hanya terdapat sumber AC (Alternating Current). Oleh karena itu
dibutuhkan power supply yang berguna untuk mengubah sumber AC menjadi DC.
Power supply merupakan gabungan dari beberapa unit yang terpisah sehingga
menjadi satu kesatuan. power supply DC terdiri dari beberapa bagian, yaitu trafo,
penyearah (rectifier), filter dan regulator. Masing-masing bagian memiliki fungsi
yang berbeda dan memiliki beberapa faktor yang harus dipertimbangkan dalam
penggunaannya. Power supply berfungsi untuk menyediakan tegangan untuk
rangkaian elektronik pada sistem pendeteksi suhu otomatis.

11 Laporan Tugas Akhir BAB II
STT Telematika Telkom Purwokerto D310008
Power supply memperoleh sumber tegangan dari PLN sebesar 220 VAC yang
kemudian diturunkan menjadi 12 VAC dengan menggunakan trafo step down.
Tegangan 12 VAC lalu disearahkan dengan menggunakan dioda bridge sehinggga
menghasilkan tegangan DC keluaran dari diode bridge ini masuk ke dalam IC
regulator yang berfungsi untuk menstabilkan tegangan. IC regulator yang digunakan
adalah 7805 yang menghasilkan keluaran sebesar +5 volt. Blok power supply terdiri
dari bagian-bagian yang di tunjukan pada gambar 2.4..[13]
Gambar 2.4 Blok Diagram Power Supply
Pada Blok diagram power supply diatas dapat dijelaskan sebagai berikut:
2.2.1 Transformator[13]
Transformator merupakan suatu peralatan listrik elektromagnetik statis yang
berfungsi untuk memindahkan dan mengubah daya listrik dari suatu rangkaian
listrik ke rangkaian listrik lainnya, dengan frekuensi yang sama dan perbandingan
transformasi tertentu melalui suatu magnet dan bekerja berdasarkan prinsip induksi
elektromagnetis, dimana perbandingan tegangan antara sisi primer dan sisi
sekunder berbanding lurus dengan perbandingan jumlah lilitan dan berbanding
terbalik dengan perbandingan arusnya. Berikut bentuk fisik Transformator dan
lilitan primer serta lilitan sekunder pada gambar 2.5
Tegangan
PLN 220
Volt
Rectifier
Diode
1N4002
Filter
Kapasitor IC Regulator
7805/ 5 Volt
Beban
Trafo Step
Down 1A/
12 Volt

12 Laporan Tugas Akhir BAB II
STT Telematika Telkom Purwokerto D310008
Gambar 2.5 Bentuk Fisik Transformator dan Lilitan Primer serta Sekunder[13]
Pada dasarnya jenis Transformator dibedakan menjadi 2 jenis yaitu Trafo
Step Up dan Trafo Step Down. Trafo Step Up digunakan untuk menaikan tegangan
listrik sedangkan Trafo Step Down digunakan untuk menurunkan tegangan listrik.
Selain itu Trafo Step Up memiliki ciri-ciri lilitan kumparan primer lebih sedikit dari
pada lilitan kumparan sekunder, tegangan primer lebih kecil dari tegangan sekunder
sedangkan ciri-ciri yang dimiliki oleh Trafo Step Down adalah lilitan kumparan
primer lebih banyak daripada lilitan kumparan sekunder, kemudian tegangan primer
lebih tinggi dari tegangan sekunder. Perbandingan antara lilitan primer (Np) dan
lilitan sekunder (Ns) disebut dengan K, dimana nilai K dapat dicari dengan rumus
berikut ini[15]
:
……………………..................................(2.1)
[15]
Keterangan :
ES =Tegangan keluaran kumparan sekunder (Volt)
EP =Tegangan Keluaran kumparan primer (Volt)
NS =Jumlah lilitan sekunder (Lilitan)
NP =Jumlah lilitan Primer (Lilitan)
Apabila nilai K>1 maka jenis trafo merupakan trafo step up, sedangkan jika
nilai K<1 maka trafo merupakan jenis trafo step down. Untuk trafo ideal dimana
K=1 atau nilai masukan sama dengan nilai keluaran.
……………………………………….............(2.2)[15]

13 Laporan Tugas Akhir BAB II
STT Telematika Telkom Purwokerto D310008
Keterangan :
Vp = Tegangan pada kumparan Primer (Volt)
Vs = Tegangan pada kumparan sekunder (Volt)
Is = Arus pada kumparan sekunder (Ampere)
Ip = Arus pada kumparan primer (Ampere)
2.2.2 Rectifier[15]
Rectifier merupakan alat yang digunakan untuk mengubah sumber arus bolak-
balik (AC) menjadi sumber arus searah (DC). Gelombang AC yang berbentuk
gelombang sinus hanya dapat dilihat dengan menggunakan alat ukur CRO.
Rangkaian rectifier banyak menggunakan transformator step down yang digunakan
untuk menurunkan tegangan sesuai dengan perbandingan transformator yang
digunakan. Pada dasarnya penyearah dibedakan menjadi 2 macam yaitu penyearah
setengah gelombang dan penyearah gelombang penuh, sedangkan untuk penyearah
gelombang penuh dibedakan menjadi penyearah gelombang penuh dengan center
tap (CT), dan penyearah gelombang penuh dengan menggunakan diode bridge.
2.2.2.1 Penyearah Setengah Gelombang[15]
Penyearah setengah gelombang merupakan rangkaian penyearah yang
paling sederhana yaitu terdiri dari satu dioda saja. Rangkaian penyearah
setengah gelombang memperoleh masukan dari sekunder trafo yang berupa
tegangan berbentuk sinus. Prinsip kerja dari penyearah setengah gelombang
adalah bahwa pada saat sinyal input berupa siklus positif maka dioda
mendapat bias maju sehingga arus akan mengalir ke beban dan sebaliknya
bila sinyal input berupa siklus negatif maka dioda mendapat bias mundur
sehingga arus tidak akan mengalir. Berikut bentuk dari penyearah setengah
gelombang. Bentuk rangkaian dari penyearah setengah gelombang bisa
dilihat pada gambar 2.6 dibawah ini :

14 Laporan Tugas Akhir BAB II
STT Telematika Telkom Purwokerto D310008
Gambar 2.6 Rangkaian Penyearah Setengah Gelombang[15]
Pada gambar 2.6 jika dioda dianggap ideal artinya tidak ada tegangan
jatuh sebesar 0,7 volt pada kaki anode-katodenya maka tegangan puncak
keluaran sama dengan tegangan puncak keluaran.
……………………………………..(2.3)[15]
Nilai rerata tegangan keluaran untuk penyearah setengah gelombang
(Vdc) atau nilai tegangan yang terbaca sesuai volt meter arus searah (DC
Voltmeter) adalah sesuai dengan formula berikut[3]
:
…………………………………………..(2.4)
[15]
Oleh karena
= 0,318 maka rumus diatas dapat diubah menjadi
…………………………………....(2.5)[15]
Bentuk penyearah setengah gelombang dapat dilihat pada gambar 2.7 dibawah ini:
Gambar 2.7 Tegangan Output Penyearah Setengah Gelombang[15]
AC Vi RL V0
2π 0
Vp
Vout
3π 4π π
ωt
15 Laporan Tugas Akhir BAB II
STT Telematika Telkom Purwokerto D310008
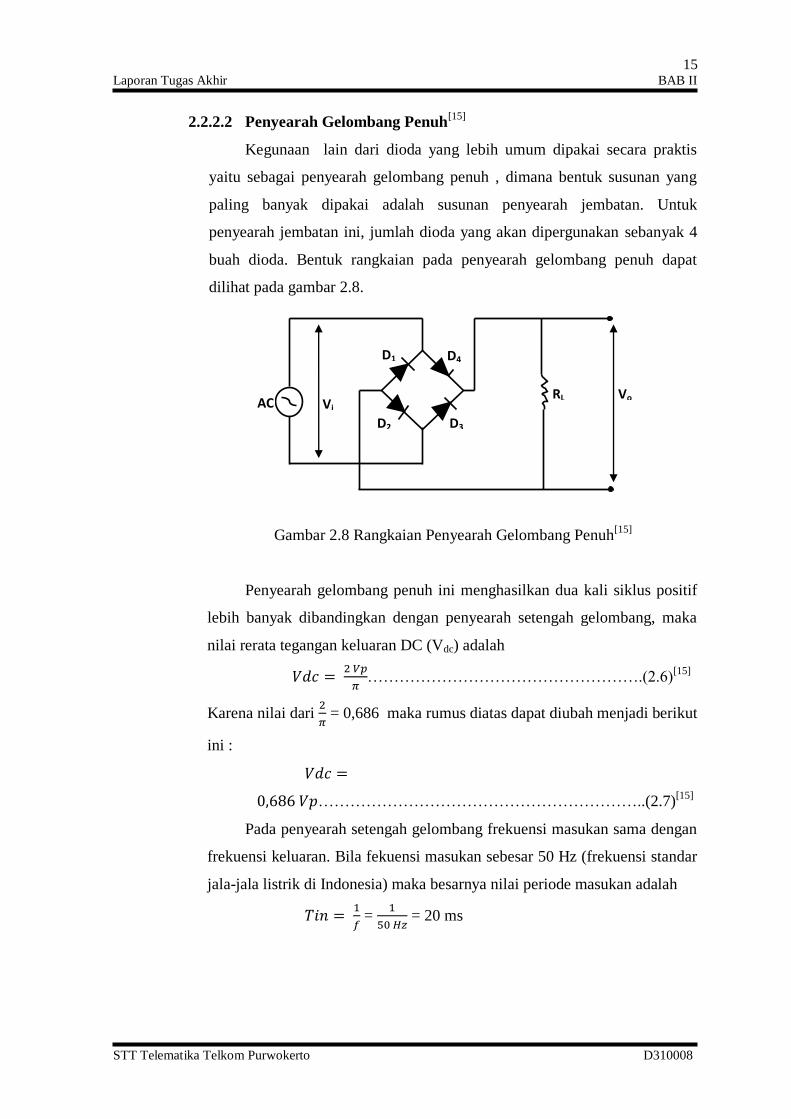
2.2.2.2 Penyearah Gelombang Penuh[15]
Kegunaan lain dari dioda yang lebih umum dipakai secara praktis
yaitu sebagai penyearah gelombang penuh , dimana bentuk susunan yang
paling banyak dipakai adalah susunan penyearah jembatan. Untuk
penyearah jembatan ini, jumlah dioda yang akan dipergunakan sebanyak 4
buah dioda. Bentuk rangkaian pada penyearah gelombang penuh dapat
dilihat pada gambar 2.8.
Gambar 2.8 Rangkaian Penyearah Gelombang Penuh[15]
Penyearah gelombang penuh ini menghasilkan dua kali siklus positif
lebih banyak dibandingkan dengan penyearah setengah gelombang, maka
nilai rerata tegangan keluaran DC (Vdc) adalah
…………………………………………….(2.6)
[15]
Karena nilai dari
= 0,686 maka rumus diatas dapat diubah menjadi berikut
ini :
……………………………………………………..(2.7)[15]
Pada penyearah setengah gelombang frekuensi masukan sama dengan
frekuensi keluaran. Bila fekuensi masukan sebesar 50 Hz (frekuensi standar
jala-jala listrik di Indonesia) maka besarnya nilai periode masukan adalah
=
= 20 ms
AC Vo RL
Vi
D4
D3 D2
D1

16 Laporan Tugas Akhir BAB II
STT Telematika Telkom Purwokerto D310008
Sedangkan pada gelombang penyearah penuh , periode sinyal
gelombang adalah setengah dari periode masukan, jadi nilai periode
keluaran sebesar.
20 ms =10 ms
Maka nilai dari frekuensi keluaran pada gelombang penyearah penuh
adalah
=
= 100 Hz
Sehingga nilai dari frekuensi keluaran adalah dua kali frekuensi
masukan.
………………………………………..(2.8)[15]
Bentuk gelombang penyearah penuh ditunjukan pada gambar 2.9.
Gambar 2.9 Tegangan Output Penyearah Gelombang Penuh[15]
2.2.2.3 Rangkaian Catu Daya Center Tap (CT)[15]
Penyearah gelombang penuh dapat pula diperoleh dengan
menyearahkan dua voltase AC yang berlawanan fase dengan penyearah
setengah gelombang. Dengan dua voltase yang berlawanan maka fase
tersebut mempunyai sambungan ditengah yang disebut center tap
seperti yang ditunjukan pada gambar 2.10.
2π 0
Vp
Vout
3π 4π π
ωt

17 Laporan Tugas Akhir BAB II
STT Telematika Telkom Purwokerto D310008
Gambar 2.10 Rangkaian Catu Daya CT[15]
Keuntungan dari rangkaian catu daya CT adalah perbandingan
voltase dri keluaran dan voltase pada dioda yang dapat mengurangi
pemborosan daya.
2.2.3 Filter[15]
Filter atau penyaring digunakan untuk mengurangi tegangan kerut (ripple
voltage) sehingga dapat diperoleh tegangan keluaran yang lebih rata, baik untuk
penyearah gelombang setengah maupun gelombang penuh. Filter diperlukan karena
rangkaian elektronik memerlukan sumber tegangan DC yang tetap, baik untuk
keperluan sumber daya dan pembiasan yang sesuai operasi rangkaian . Ada dua
komponen yang umum digunakan sebagai rangkaian filter, yaitu induktor dan
kapasitor. Berikut gambaran rangkaian penyearah dengan filter, ditunjukan oleh
gambar 2.11.
Gambar 2.11 Gambaran Pemakaian Filter pada Penyearah[15]
PENYEARAH
GELOMBANG
PENUH
FILTER
Trafo
+
-
CT
D2
D1
C R
Vout
GND

18 Laporan Tugas Akhir BAB II
STT Telematika Telkom Purwokerto D310008
Berdasarkan pada gambar diatas bahwa keluaran dari penyearah yang ber-
filter memiliki dua komponen yaitu komponen bolak-balik (AC) dan komponen
searah (DC). Komponen AC pada penyearah disebut juga sebagai kerut (ripple).
Semakin kecil kerut, semakin baik kualitas rangkaian penyearah tersebut. Tegangan
kerut yang lebih kecil terdapat pada filter kapasitor yang terpasang pada penyearah
gelombang penuh dibandingkan dengan yang terpasang pada penyearah setengah
gelombang.
Tegangan kerut atau ripple yang dihasilkan pada filter kapasitor masukan
dapat diperkirakan besarnya berdasarkan formula berikut ini.
Vr = I.R.L / f.C……………………………..……………………(2.9)[15]
Keterangan :
Vr = Tegangan kerut puncak ke puncak (Volt)
IRL = Arus beban DC (Ampere)
F = frekuensi kerut (Hz)
C = nilai kapasitansi terpasang (farad)
2.2.4 IC Regulator[13]
Regulator digunakan sebagai penstabil untuk memberikan tegangan keluaran
yang konstan walaupun terdapat fluktuasi baik arus beban maupun tegangan input
sumber. IC Regulator yang digunakan adalah LM 7805 untuk menghasilkan output
tegangan sebesar 5 Volt. IC regulator ini akan menstabilkan tegangan DC. Selain
IC regulator 7805 juga terdapat IC regulator yang lainnya missal LM 7812
menghasilkan tegangan keluaran +12 VDC, LM 7809 menghasilkan tegangan
keluaran +9 VDC. Berikut skema dari IC regulator dan bentuk fisik LM 7805 yang
di tunjukan pada gambar 2.12.
Gambar 2.12 IC Regulator 7805 [13]

19 Laporan Tugas Akhir BAB II
STT Telematika Telkom Purwokerto D310008
2.3 TRANSISTOR[14]
Transistor adalah komponen elektronika yang terbuat dari bahan semi
konduktor dan memiliki tiga elektroda (triode) yaitu dasar (basis), pengumpul
(kolektor) dan pemancar (emitor). Dengan ketiga elektroda (terminal) tersebut,
tegangan atau arus yang dipasang disatu terminalnya mengatur arus yang lebih
besar yang melalui dua terminal yang lain.
Transistor merupakan gabungan dari dua kata, yaitu “transfer” yang merupakan
pemindahan dan “resistor” yang merupakan penghambat. Dengan demikian
transistor dapat diaktifkan sebagai suatu pemindahan atau peralihan bahan
setengah penghantar pada suatu keadaan tertentu. Simbol transistor ditunjukan
pada gambar 2.13.
Gambar 2.13 Jenis Dan Simbol Transistor
Transistor termasuk komponen semi konduktor yang bersifat menghantar
ddan menahan arus listrik. Dari gambar 2.13 terdapat dua jenis transistor yaitu
transistor N-P-N dan transistor P-N-P. Transistor NPN adalah transistor positif
dimana transistor ini bekerja mengalirkan arus listrik apabila basis dialiri tegangan
arus positif, sedangkan transistor PNP adalah transistor negatif yang bekerja
mengalirkan arus apabila basis dialiri tegangan negatif.
Fungsi transistor dalam sebuah rangkaian elektronika memiliki peran penting
untuk mendapatkan tegangan kerja yang baik bagi sebuah rangkaian, dimana
fungsi tersebut yaitu:
2.3.1 Transisitor Sebagai Saklar[14]
Transistor bipolar dapat difungsikan sebagai saklar elektronika dengan
memanfaatkan dua keadaan transistor yaitu keadaan saturasi (sebagai

20 Laporan Tugas Akhir BAB II
STT Telematika Telkom Purwokerto D310008
saklar tertutup) dan keadaan cut off (sebagai saklar terbuka). Transistor
memiliki daerah-daerah kerja, yaitu daerah saturasi, daerah potong (cut
off), daerah aktif dan daerah breakdown. Daerah-daerah kerja transistor
digambarkan pada kurva karakteristik transistor, ditunjukan pada gambar
2.14.
Gambar 2.14 Kurva Karakteristik Transistor.[14]
Fungsi dasar transistor sebagai saklar, ditunjukkan oleh rangkaian
yang tampak pada Gambar 2.28 di bawah ini. Jika tegangan input, Vi,
memiliki harga kurang dari tegangan yang diperlukan untuk membuat
dioda emiter berprategangan maju, maka arus IB = 0, sehingga transistor
akan jatuh pada Daerah Potong dan IC = 0. Karena IC = 0, maka tegangan
yang melintas tahanan beban RC adalah nol dan tegangan output VO =
Vcc. Pada kondisi ini, seolah-olah Transistor seperti sebuah saklar yang
terputus (off).
Gambar 2.15 Rangkaian Transistor sebagai saklar[14]
Jika tegangan input, Vi, terus meningkat sehingga Dioda Emiter diberi
prategangan maju, Transistor akan mulai masuk ke daerah aktif, sehingga:

21 Laporan Tugas Akhir BAB II
STT Telematika Telkom Purwokerto D310008
.......................................................................... (2.10)
[14]
Sekali Transistor mulai aktif, belum diketahui apakah Transistor
berada pada daerah aktif atau berada pada daerah saturasi. Dengan
menggunakan aturan tegangan Kirchoff (KVL) pada putaran dioda
kolektor, akan didapat:
............................................................. (2.11)[14]
sehingga:
.............................................................. (2.12)
[14]
Persamaan (2.12) adalah persamaan Garis Beban Transistor. Dalam
bentuk grafik, garis ini diperlihatkan dalam Gambar 2.16. Bersamaan
dengan terus meningkatnya arus Basis, IB, transistor dapat beroperasi
sepanjang garis beban. Hal ini terus terjadi, sehingga arus basis (IB),
mencapai harga arus maksimum (IB3). Arus ini dikenal dengan arus
saturasi dan jika Transistor beroperasi pada kondisi ini, maka dikatakan ia
berada pada daerah saturasi. Oleh karena itu, arus Kolektor adalah:
.............................................................. (2.13)
[14]
Transistor bekerja seperti sebuah saklar yang terhubung (on). Titik
perpotongan terhadap sumbu IC dan VCE diperoleh dengan cara
mengatur:
= 0 maka =
= 0 maka = . sehingga
Gambar 2.16. Garis Beban dan Titik Operasi Transistor.[14]

22 Laporan Tugas Akhir BAB II
STT Telematika Telkom Purwokerto D310008
2.4 SENSOR HUJAN[16]
Rangkaian sensor ini dirancang untuk mendeteksi air pada saat hujan turun.
Rangkaian ini menggunakan potongan papan PCB yang dibentuk sesuai dengan
kebutuhan, kemudian tembaga yang dibentuk menyerupai sirip ikan dengan dua
jalur berbeda. Jalur pertama pada rangkaian sensor hujan terhubung dengan
tegangan sumber, sedangkan tembaga kedua terhubung dengan ground dan resistor
sebagai komponen utama serta elektroda sebagai pendeteksi air. di tunjukan pada
gambar 2.17. [16]
Gambar 2.17 Rangkaian Sensor Hujan[16]
Dari gambar 2.17 dapat dilihat dimana saat air menyentuh kedua elektroda
(tembaga) maka tegangan 5V akan terhubung dengan output dan sebagian tegangan
akan berkurang karena air berfungsi sebagai penghambat. Tegangan keluarannya
sebesar 3V sampai 4.5 V dengan jarak antara kedua elektroda ±2cm dan resistor
yang digunakan sebesar 1k Ω sampai 10k Ω.
2.5 SENSOR CAHAYA[14]
Pemakaian sensor cahaya Light Dependent Resistor (LDR) dalam simulasi
pelindung hujan, di maksudkan untuk mendeteksi perubahan cuaca yang berada
disekitar sensor dan memberi masukan kepada mikrokontroller mengenai
perubahan cahaya dan selanjutnya memproses masukan yang diterima dari sensor
cahaya Light Dependent Resistor (LDR). Sensor ini merupakan satu jenis dari
resistor yang memungkinkan mengalami perubahan pada resistansinya pada saat
menerima perubahan cahaya pada suatu tempat. Nilai hambatan yang mungkin
dapat diterima pada sensor cahaya Light Dependent Resistor (LDR) tergantung

23 Laporan Tugas Akhir BAB II
STT Telematika Telkom Purwokerto D310008
pada besar kecilnya cahaya yang diterima oleh Light Dependent Resistor (LDR) itu
sendiri ditunjukan oleh gambar 2.18.[14]
Gambar 2.18 Sensor Cahaya Light Dependent Resistor (LDR)
Sensor ini terbuat dari cadmium sulfide yaitu merupakan bahan semi konduktor
dimana resistansinya berubah-ubah menurut banyaknya cahaya (sinar) yang didapat.
Resistansi pada Light Dependent Resistor (LDR) yang biasa terjadi pada tempat
gelap sekitar 10 M Ω, dan ditempat terang resistansinya menurun menjadi sekitar
150 Ω.
Pada rangkaian sensor hujan dan sensor cahaya Light Dependent Resistor
(LDR) ini ada sebuah tambahan komponen yaitu trimpot. Trimpot adalah sebuah
resistor yang nilai hambatan ataupun nilai tahanannya dapat dirubah secara manual
sesuai dengan kebutuhan dengan cara memutar bagian pengatur pada trimpot dengan
menggunakan obeng atau alat bantu lainnya. Bentuk fisik dan symbol dari trimpot di
tunjukan pada gambar 2.19[16]
Gambar 2.19 Bentuk Fisik dan Symbol Trimpot
2.6 SAKLAR LIMIT SWITCH
Saklar limit switch adalah jenis saklar yng dilengkapi dengan katup dimana
katup ini berfungsi untuk menggantikan tombol. Pada dasarnya prinsip kerja dari
limit switch sama dengan saklar push on yaitu hanya akan menghubung ketika
katupnya ditekan pada batas penekanan yang telah ditentukan yang kemudian akan
memutus pada saat katup tidak ditekan. Limit switch masuk dalam kategori sensor
mekanis yaitu sensor yang akan memberikan perubahan elektrik pada saat terjadi

24 Laporan Tugas Akhir BAB II
STT Telematika Telkom Purwokerto D310008
perubahan mekanik pada sensor tersebut. Pada penerapan dari limit switch adalah
sebagai sensor posisi dalam suatu benda (objek) yang bergerak. Limit switch
ditunjukan pada gambar 2.20.
Gambar 2.20 Limit Switch
Dalam pengoperasian limit switch umumnya digunakan untuk :
1. Memutuskan dan menghubungkan rangkaian menggunakan objek atau
benda lain.
2. Menghidupkan daya yang besar, dengan sarana yang keil.
3. Sebagai sensor posisi atau kondisi suatu objek.
Limit switch diaktifkan dengan penekanan pada tombolnya pada batas atau
daerah yang telah ditentukan sebelumnya sehingga terjadi pemutusan atau
penghubungan rangkaian dari rangkaian tersebut. Dalam limit switch terdapat dua
kontak yaitu Normally Open (NO) dan kontak Normally Close (NC) dimana salah
satu kontak akan aktif jika tombolnya tertekan. Kontruksi dan simbol limit switch
ditunjukan pada gambar 2.21.
Gambar 2.21 Kontruksi dan Simbol Limit Switch
2.7 MIKROKONTROLER ATMEGA8[12]
Mikrokontroler Alf And Vegard’s Risc Processor (AVR) merupakan salah satu
jenis mikrokontroler yang didalamnya terdapat berbagai macam fungsi.
Mikrokontroler ATmega 8 ini diproduksi oleh ATMEL, ATMEL merupakan salah

25 Laporan Tugas Akhir BAB II
STT Telematika Telkom Purwokerto D310008
satu vendor dibagian bidang mikro elektronika yang telah mengembangkan seri AVR
sekitar tahun 1997. Mikrokontroler jenis AVR merupakan prosesor yang sekarang ini
paling banyak digunakan dalam membuat aplikasi sistem kendali bidang
instrumentasi, dibandingkan dengan mikrokontroler keluarga MCS51 seperti AT
89C51/52.
AVR sendiri mempunyai keunggulan dibandingkan dengan mikrokontroler
lainnya. Karena itu banyak orang yang menggunakan mikrokontroler ini karena
keunggulan mikrokontroler AVR yaitu AVR memiliki kecepatan eksekusi program
lebih cepat karena sebagian besar instruksi dalam satu siklus clock, berbeda dengan
instruksi MCS51 yang membutuhkan 12 siklus clock.
Secara teknis hanya ada 2 jenis mikrokontroler yaitu RISC dan CISC dan
masing-masing mempunyai keluarga sendiri-sendiri. RISC kependekan dari Reduced
Instruction Set Computer instruksi terbatas tapi memiliki fasilitas yang lebih banyak.
CISC kependekan dari Complex Instruction Set Computer, instruksi bisa dikatakan
lebih lengkap tapi dengan fasilitas secukupnya.
Secara umum AVR dapat dikelompokan menjadi 4 kelas yaitu keluarga
ATtiny, keluarga AT90Sxx, keluarga ATMega dan AT8RFxx. Pada dasarnya yang
membedakan masing-masing kelas adalah memori, peripheral dan fungsinya. Dari
segi arsitektur dan instruksi yang digunakan hampir sama. Untuk gambar blok
diagram fungsional ditunjukan pada Gambar 2.22.[12]

26 Laporan Tugas Akhir BAB II
STT Telematika Telkom Purwokerto D310008
Gambar 2.22 Blok Diagram Fungsional ATMega 8.[12]

27 Laporan Tugas Akhir BAB II
STT Telematika Telkom Purwokerto D310008
Dari Gambar 2.21 blok diagram dapat dilihat bahwa mikrokontroler
ATMega 8 memiliki fitur-fitur dibawah ini[12]
:
a. Kinerja tinggi, rendah daya Atmel AVR 8-bit Mikrokontroler
b. Lanjutan RISC Arsitektur
1) 130 Instruksi Powerfull - Kebanyakan Single-jam Siklus Eksekusi
2) 32 × 8 General Purpose Register Kerja
3) Operasi Sepenuhnya Statis
4) Hingga 16MIPS throughput pada 16MHz
5) On-chip 2-siklus Multiplier
c. Daya tahan tinggi segmen memori non-volatile
1) 8Kbytes In-System Self-programmable memori program flash
2) 512bytes EEPROM
3) 1Kbyte internal SRAM
4) Menulis / Menghapus Siklus: 10.000 Flash/100, 000 EEPROM
5) Data retensi: 20 tahun pada 85 ° C/100 tahun pada 25 ° C
6) Opsional Boot Kode Bagian dengan Lock Bits Independen In-System
Programming oleh Program Boot On-chip Benar Baca-Sementara-
Tulis Operasi
7) Kunci Pemrograman untuk Security Software
d. Fitur peripheral
1) Dua 8-bit Timer/Counter dengan Prescaler terpisah, satu
Bandingkan Modus
2) Satu 16-bit Timer/Counter dengan Prescaler terpisah, Compare
Mode, dan Captur Modus
3) Nyata Kontra Waktu dengan Oscillator terpisah
4) Tiga PWM Channels
5) 8-channel ADC di TQFP dan QFN / MLF paket Delapan Saluran 10-
bit Akurasi
6) 6-channel ADC dalam paket PDIP Enam Saluran 10-bit Akurasi
7) Berorientasi Byte Dua-kawat Serial Antarmuka
8) Serial USART Programmable
9) Master / Slave SPI Serial Antarmuka

28 Laporan Tugas Akhir BAB II
STT Telematika Telkom Purwokerto D310008
10) Programmable Watchdog Timer dengan terpisah Oscillator On-chip
11) On-chip Analog Comparator
e. Fitur Mikrokontroler Khusus
1) Power-on Reset dan Programmable Deteksi Brown-out
2) Internal dikalibrasi RC Oscillator
3) Eksternal dan Internal Sumber Interrupt
4) Tidur Lima Mode: Idle, ADC Noise Reduction, Power-save, Power-
down, dan Standby
f. I / O dan Paket
1) 23 Programmable I / O Garis
2) 28-lead PDIP, TQFP 32-lead, dan 32-pad QFN / MLF
g. Tegangan operasi
1) 2.7V - 5.5V (ATmega8L)
2) 4.5V - 5.5V (ATmega8)
h. Kelas Kecepatan
1) 0 - 8MHz (ATmega8L)
2) 0 - 16MHz (ATmega8
2.7.1 Konfigurasi pin ATMega 8[12]
ATMega8 memiliki 28 Pin, yang masing-masing pin nya memiliki
fungsi yang berbeda-beda baik sebagai port maupun fungsi yang lainnya.
Pada Gambar 2.23 merupakan gambar bentuk fisik dari ATMega 8.
Gambar 2.23 Bentuk Fisik ATMega 8.[12]

29 Laporan Tugas Akhir BAB II
STT Telematika Telkom Purwokerto D310008
Gambar 2.24 Konfigurasi Pin ATMega 8.[12]
ATMega 8 memiliki 28 pin, yang masing-masing pin nya memiliki
fungsi yang berbeda-beda, penjelasanya seperti dibawah ini[12]
:
a. VCC merupakan input catu daya.
b. GND Digunakan untuk dihubungkan ke ground.
c. AREF Merupakan referensi bila menggunkan ADC.
d. AVCC merupakan Merupakan suplay tegangan ADC. Untuk pin ini
dihubungkan terpisah dengan VCC karena pin ini digunakan untuk
analog saja. Jika ADC digunakan sebaiknya AVcc disambung ke VCC
melalui low-pass filter.
e. Port B (PB7-PB0)
merupakan sebuah 8-bit (bi-directional) I/O dengan internal pull-up
resistor, jumlah port B adalah 8 buah pin mulai dari pin B.0 sampai B.7.
Didalam Port B terdapat XTAL1, XTAL2, TOSC1, TOSC2. Jumlah Port
B adalah 8 buah pin, mulai dari pin B.0 sampai dengan B.7. Tiap pin
dapat digunakan sebagai input maupun output. Port B merupakan sebuah

30 Laporan Tugas Akhir BAB II
STT Telematika Telkom Purwokerto D310008
8-bit bi-directional I/O dengan internal pull-up resistor. Sebagai input,
pin-pin yang terdapat pada port B yang secara eksternal diturunkan, maka
akan mengeluarkan arus jika pull-up resistor diaktifkan. Khusus PB6
dapat digunakan sebagai input Kristal (inverting oscillator amplifier) dan
input ke rangkaian clock internal, bergantung pada pengaturan Fuse bit
yang digunakan untuk memilih sumber clock. Sedangkan untuk PB7
dapat digunakan sebagai output Kristal (output oscillator amplifier)
bergantung pada pengaturan Fuse bit yang digunakan untuk memilih
sumber clock. Jika sumber clock yang dipilih dari oscillator internal,
PB7 dan PB6 dapat digunakan sebagai I/O atau jika menggunakan
Asyncronous Timer/Counter2 maka PB6 dan PB7 (TOSC2 dan TOSC1)
digunakan untuk saluran input timer.
Tabel 2.2 Fungsi Khusus Port B
PIN FUNGSI
PB7 XTAL2 (Timer Oscillator pin 2)
(Timer Osclilator pin 2)
PB6 XTAL1 (Chip Clock Oscillator pin 1 or External clock input)
TOSC1 (Timer Oscillator pin 1)
PB5 SCK (SPI Bus Master clock Input)
PB4 MISO (SPI Bus Master Input/Slave Output)
PB3 MOSI (SPI Bus Master Output/Slave Input)
OC2 (Timer/Counter2 Output Compare Match Output)
PB2 SS (SPI Bus Master Slave select)
OC1B (Timer/Counter1 Output Compare Match B Output)
PB1 OC1A (Timer/Counter1 Output Compare Match A Output)
PB0 ICP1 (Timer/Counter1 Input Capture Pin)
f. Port C (PC6-PC0)
Merupakan sebuah 7-bit (bi-directional) I/O dengan internal pull-up
resistor, jumlah port C adalah 7 buah pin mulai dari pin C.0 sampai C.6.
Sebagai output C memiliki karakteristik yang sama yaitu sebagai ADC.

31 Laporan Tugas Akhir BAB II
STT Telematika Telkom Purwokerto D310008
Tabel 2.3 Fungsi Khusus Port C
PIN FUNGSI
PC6 RESET (Reset pin)TOSC1 (Timer Oscillator pin 1)
PC5 ADC5 (ADC Input Channel 5)
SCL (Two-wire Serial Bus Clock Line)
PC4 ADC4 (ADC Input Channel 4)
SDA (Two-wire Serial Bus Data Input/Output Line)
PC3 ADC3 (ADC Input Channel 3)
PC2 ADC3 (ADC Input Channel 2)
PC1 ADC3 (ADC Input Channel 1)
PC0 ADC3 (ADC Input Channel 0)
Sedangkan untuk PC6 beda dengan port-port C lainnya port PC6 ini
digunakan sebagai RESET dengan logika low yang lebih lama dari
minimum panjang atau clock tidak berjalan.
g. Port D (PD7-PD0)
Merupakan sebuah 8-bit (bi-directional) I/O dengan internal pull-up
resistor, jumlah port D adalah 8 buah pin mulai dari pin D.0 sampai D.7.
Pada port D ini hanya berfungsi sebagai output dan input saja.
Tabel 2.4 Fungsi Khusus Port D
PIN FUNGSI
PD7 AIN1 (Analog Comparator Negative Input)
PD6 AIN0 (Analog Comparator Positive Input)
PD5 T1 (Timer/Counter 1 External Counter Input)
PD4 XCK (USART External Clock Input/Output)
T0 (Timer/Counter 0 External Counter Input)
PD3 INT1 (External Interrupt 1 Input)
PD2 INT0 (External Interrupt 0 Input)
PD1 TXD (USART Output Pin)
PD0 RXD (USART Input Pin)

32 Laporan Tugas Akhir BAB II
STT Telematika Telkom Purwokerto D310008
2.7.2 Memori ATMega 8[12]
Mikrokontroler ATMega 8 terdiri dari 3 komponen memori yaitu
memori flash merupakan memori yang digunakan untuk penyimpanan
program. Ukuran memoro flash sebesar 8 kB, memori (SRAM) Static
Random Access Memori merupakan memori RAM yang digunakan untuk
penyimpanan data sementara, ukuran memori ini sebesar 512 Byte
sedangkan memori (EEPROM) Electrically Erasable Programmable Read
Only Memory merupakan memori data pada ATMega 8, ukuran dari memori
ini sebesar 512 Byte. Pada Gambar 2.25 adalah gambar peta memori
ATMega 8.[12]
Gambar 2.25 Peta Memori ATMega 8.[12]
a. Memori flash
Memori flash digunakan untuk menyimpan program ATMega 8 yang
dijalankan Ukuran dari memori flash sebesar 8 kB. ATMega memiliki 512
byte dengan alamat mulai dari $000 sampai $FFF. Pada Gambar 2.25
merupakan memori program pada ATMega 8.
32 General
Purpose
Register
EEPROM
64 I/O
register
Additional
I/O
Register
Internal
RAM
32 General
Purpose
Register
Flash
$000
F_END
Data
Memory
$0000
$001F
$0020
RAMEND
$005F
$0060
$000
E_END

33 Laporan Tugas Akhir BAB II
STT Telematika Telkom Purwokerto D310008
Gambar 2.26 Memori Program ATMega 8.[12]
Memori flash dibagi menjadi 2 bagian yaitu aplikasi dan boot. Bagian
aplikasi adalah bagian-bagian program aplikasi berada sedangkan boot
adalah bagian khusus untuk booting awal.
b. Memori Data SRAM (Static Random Access Memori)
Memori Data SRAM (Static Random Access Memori) merupakan
memori RAM yang digunakan untuk penyimpanan data sementara, ukuran
memori ini sebesar 512 Byte. Ada 96 lokasi alamat file register dan memori
I/O dan 1024 lokasi alamat SRAM dan internal.
c. Memori data EEPROM
ATMega 8 mempunyai 512 byte memori data EEPROM 8 bit. Semua
Memori ATMega 8 diletakan diruang I/O. Data terpisah ruang dimana satu
byte dapat dibaca dan ditulis. Memori ini memiliki daya tahan paling
100.000 kali menulis/menghapus.
Aplication Flash
Section
Boot Flash Section

34 Laporan Tugas Akhir BAB II
STT Telematika Telkom Purwokerto D310008
Gambar 2.27 Peta Memori Data ATMega 8.[12]
Register keperluan umum menempati space data pada alamat
terbawah yaitu $00 sampai $1F. Sementara itu register khusus untuk
menangani I/O dan control terhadap mikrokontroler menempati 64
berikutnya yaitu mulai dari $20 hingga $5F. Register tersebut register yang
khusus digunakan untuk mengatur fungsi terhadap berbagai pheripheral
mikrokontroler, seperti kontrol register, timer/counter, fungsi-fungsi I/O dan
sebagainya. Alamat memori berikutnya digunakan untuk SRAM 512 byte
yaitu pada lokasi $60 sampai dengan $45F.
$0022
- - - - - - - - -
$005D
R29
$3D
R0
R1
R2
$00
R31
R30
$01
$03
S3E
$3F
- - - - - - - - -
- - - - - - - - -
$0000
$0001
$001D
$0020
$001F
$001E
$005E
$005F
- - - - - - - - -
$0002
$0021
$045F
- - - - - - - - -
$0061
$045E
$0060
Register File Data Address Space
I/O REGISTER
Internal SRAM

35 Laporan Tugas Akhir BAB II
STT Telematika Telkom Purwokerto D310008
2.7.3 Rangkain Reset[13]
Rangkaian reset ini berfungsi untuk mengembalikan kondisi
mikrokntroler ke kondisi semula karena terjadinya program error saat
dieksekusi. Pada mikrokontroler ATMega 8 rangkaian reset akan terhubung
ke PIN 1 dimana PIN 1 itu merupakan PIN khusus untuk reset. Di rangkaian
reset mikrokontroler terdiri dari komponen kapasitor dan resistor. Kondisi
reset terjadi karena adanya logika 1 pada kaki RST. Pada saat aliran daya
masuk ke rangkaian reset maka RST akan berlogika 1 kemudian aliran daya
tersebut masuk ke kapasitor sampai ke VCC sehingga secara langsung
tegangan yang ada pada resistor akan turun menkadi berlogika 0. Pada
Gambar 2.28 merupakan rangkaian reset.[13]
Gambar 2.28 Rangkaian Reset.[13]
Pada saat rangkaian reset konstanta waktu pengisian proses
melakukan reset pada mikrokontoler ATMega 8 dapat dihitung dengan cara
mengalikan nila dari R (resistor) dan C (capasittor).
T= R x C……………………………………………………………2.10)[13]
Keterangan :
T = Waktu yang diperlukan melakukan reset (µs)
R = Resistor yang digunakan pada rangkaian reset (ohm)
C = Kapasitor yang digunakan pada rangkaian reset (µF)
Sedangkan lama waktu untuk melakukan eksekusi 1 instruksi perintah reset
adalah sebesar :
……… ………………………………………(2.11)
[13]
36 Laporan Tugas Akhir BAB II
STT Telematika Telkom Purwokerto D310008
Dengan :
Tinst = Waktu yang dibutuhkan untuk mengeksekusi 1 instruksi (ms)
C = Kapasitor pada rangkain reset (µF)
F = Frekuensi Kristal pada rangkaian (MHz)
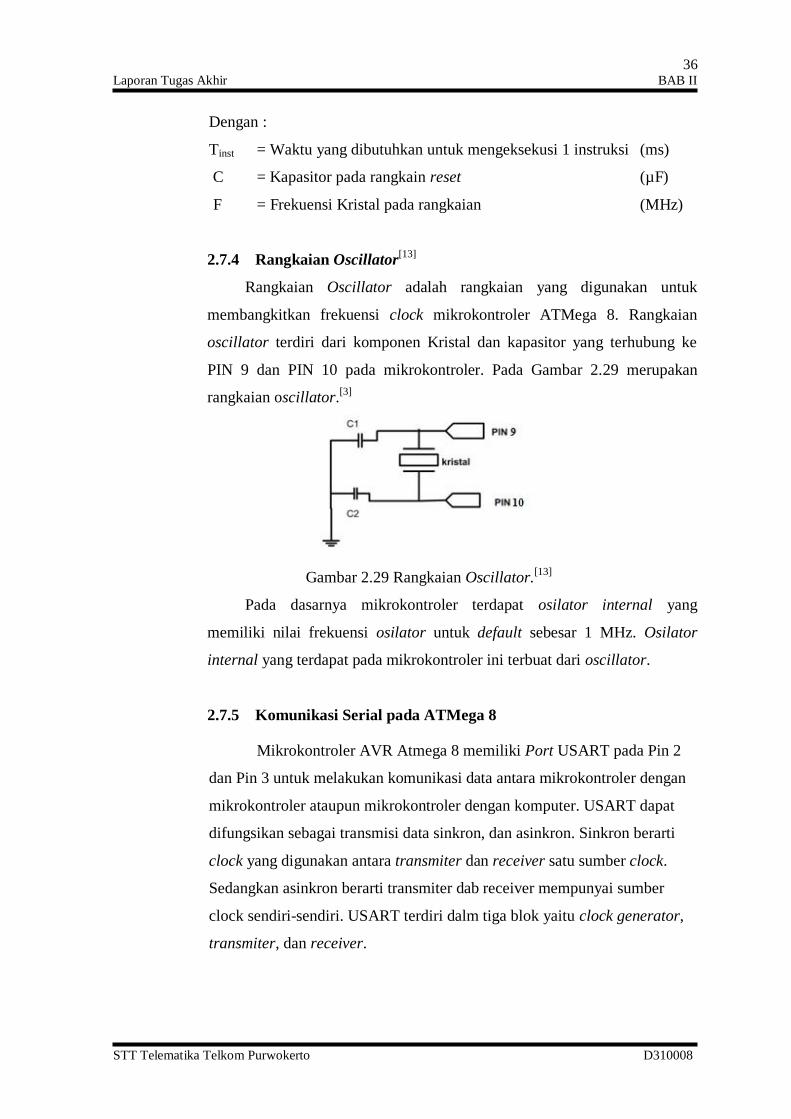
2.7.4 Rangkaian Oscillator[13]
Rangkaian Oscillator adalah rangkaian yang digunakan untuk
membangkitkan frekuensi clock mikrokontroler ATMega 8. Rangkaian
oscillator terdiri dari komponen Kristal dan kapasitor yang terhubung ke
PIN 9 dan PIN 10 pada mikrokontroler. Pada Gambar 2.29 merupakan
rangkaian oscillator.[3]
Gambar 2.29 Rangkaian Oscillator.[13]
Pada dasarnya mikrokontroler terdapat osilator internal yang
memiliki nilai frekuensi osilator untuk default sebesar 1 MHz. Osilator
internal yang terdapat pada mikrokontroler ini terbuat dari oscillator.
2.7.5 Komunikasi Serial pada ATMega 8
Mikrokontroler AVR Atmega 8 memiliki Port USART pada Pin 2
dan Pin 3 untuk melakukan komunikasi data antara mikrokontroler dengan
mikrokontroler ataupun mikrokontroler dengan komputer. USART dapat
difungsikan sebagai transmisi data sinkron, dan asinkron. Sinkron berarti
clock yang digunakan antara transmiter dan receiver satu sumber clock.
Sedangkan asinkron berarti transmiter dab receiver mempunyai sumber
clock sendiri-sendiri. USART terdiri dalm tiga blok yaitu clock generator,
transmiter, dan receiver.

37 Laporan Tugas Akhir BAB II
STT Telematika Telkom Purwokerto D310008
2.8 LIGHT EMMITING DIODE (LED)[14]
Light Emitting Diode atau diode pemancar cahaya merupakan sebuah jenis
diode yang dapat memancarkan cahaya pada saat diberikan tegangan. Fungsi dari
LED sendiri digunakan sebagai tanda atu lampu indikator. Untuk dapat menyalakan
led dibutuhkan tegangan sebesar 2 volt (normalitasnya) dengan arus 10-150 mA.
Pada Gambar 2.30 merupakan bentuk fisik dari LED.
Gambar 2.30 Light Emitting Diode (LED)[14]
2.9 KOMUNIKASI SERIAL [12]
Komunikasi serial ialah komunikasi dimana pengiriman data dilakukan per bit,
sehingga lebih lambat dibandingkan komunikasi paralel seperti pada port printer yang
mampu mengirim 8 bit sekaligus dalam sekali detak. Beberapa contoh komunikasi
serial ialah mouse dan scanner yang terhubung ke port COM1/COM2.
2.9.1 Peralatan Komunikasi Serial
Devais pada komunikasi serial port dibagi menjadi 2 (dua ) kelompok
yaitu Data Communication Equipment (DCE) dan Data Terminal Equipment
(DTE). Contoh dari DCE ialah modem, plotter, scanner dan lain-lain
sedangkan contoh dari DTE ialah terminal di komputer. Spesifikasi elektronik
dari serial port merujuk pada Electronic Industry Association (EIA) :[10]
1. “Space” (logika 0) ialah tegangan antara + 3 hingga +25 V.
2. “Mark” (logika 1) ialah tegangan antara –3 hingga –25 V.
3. Daerah antara + 3V hingga –3V tidak didefinisikan /tidak terpakai
4. Tegangan open circuit tidak boleh melebihi 25 V.
5. Arus hubungan singkat tidak boleh melebihi 500mA.
Komunikasi serial membutuhkan port sebagai saluran data. Gambar
2.31 menunjukan tampilan port serial DB9 .
38 Laporan Tugas Akhir BAB II
STT Telematika Telkom Purwokerto D310008
Gambar 2.31 Port DB9 [12]
Tabel 2.5 merupakan tabel yang menjelaskan fungsi dari PIN yang
terdapat pada DB9. Bagian yang terpenting dalam komunikasi serial adalah
konektor DB9 seperti yang tampak pada gambar 2.30 sendiri merupakan
konektor yang dipergunakan untuk dapat menghubungkan hardware dengan
komputer atau perangkat lain yang mendukung sistem komunikasi serial.
Dalam pembuatan alat yang berjudul perancangan alat penampil isi SMS
menggunakan LCD karakter berbasis Arduino R3 ini sangat penting karena
mengguakan komunikasi serial pada masing-masing pin mempunyai fungsi
yang berbeda. Contoh fungsi dari pin TD yang berfungsi untuk pengiriman
Data Serial.
Tabel 2.5 Fungsi PIN DB9.
Nama
PIN Keterangan Fungsi
TD Transmisi Data Untuk pengiriman Data serial
RD Receive Data Untuk penerimaan Data serial
RTS Request To Send Sinyal untuk menginformasikan modem bahwa UART
siap melakuan pertukaran Data.
CTS Clear To Send Memberitahukan bahwa modem siap melakukan
pertukaran Data
DSR Data Set Ready Untuk memberitahukan UART bahwa modem siap
melakukan pertukaran Data
CD Carrier Detect Saat modem mendeteksi suatu “carrier” dari modem
lain, maka sinyal ini akan diaktifkan
DTR Data Terminal
Ready
Kebalikan dari DSR untuk memberitahu bahwa UART
siap melakukan komunikasi.
RI Ring Indicator Aktif saat mendeteksi sinyal dering dari telephone.

39 Laporan Tugas Akhir BAB II
STT Telematika Telkom Purwokerto D310008
2.9.2 Konverter Logika RS-232 [12]
Ada dua jenis cara pengiriman data serial USART, kedua cara
tersebut dapat dibedakan berdasarkan sinyal detak (clock) yang dipakai
untuk membawa data serial tersebut, jika detak dikirim bersama-sama
dengan data serial maka cara pengiriman tersebut dengan istilah
pengiriman data serial secara sinkron (Synchronous). Bila pengiriman
data dilakukan secara tak sinkron (Asynchronous) maka detak tidak
dikirim bersama data serial, sehingga rangkaian penerima data harus
membangkitkan sendiri detak pendorong data serial.
Mikrokontroler AVR telah mendukung kedua teknik pengiriman
data serial tersebut, baik secara sinkron maupun asinkron.
Penggabungan kedua teknik tersebut dikenal dengan istilah Universal
Synchronous and Asynchronous serial Receiver and Transmitter
(USART).
2.9.2.1 Fitur pada Serial USART
Universal Synchronous And Asynchronous Serial Receiver and
Transmitter (USART) merupakan salah satu perangkat komunikasi serial
yang mempunyai tingkat fleksibilitas komunikasi yang sangat tinggi. Pada
mikrokontroler Atmel AVR, biasanya fitur USART mencakup :
a. Operasi full duplex
b. Dapat beroprasi pada mode Ansychronous dan Synchronous
c. Dapat bekerja dengan baud rate yang tinggi
d. Mendukung serial frames dengan data bit 5,6,7,8 atau 9 data bit
dan dilengkapi dengan 1 atau 2 stop bit.
e. Dilengkapi dengan fasilitas parity check dan dapat bekerja pada
parity odd atau Even.
f. Dapat beroprasi sebagai master atau Slave clock Synchronous
g. Dilengkapi dengan fitur Data OveRun Detection
h. Terdapat fasilitas frame Error Detection
i. Dilengkapi dengan filter untuk menyaring noise, yaitu digital low
pass filter

40 Laporan Tugas Akhir BAB II
STT Telematika Telkom Purwokerto D310008
j. Mempunyai tiga interupsi yang terpisah pada TX complete, TX data
Register Empty dan RX complete
k. Mendukung komunikasi multiprosessor
l. Mempunyai bekerja pada mode komunikasi Double Speed
Asynchronous.
2.9.2.2 Menggunakan MAX232[12]
Port COM pada komputer tidak dapat secara langsung dihubungkan
pada mikrokontroler maka dibutuhkan pengemudi jalur yang berfungsi
untuk mengubah tegangan sinyal RS232 kelevel tegangan TTL agar dapat
diterima oleh mikrokontroler AVR.
Salah satu chip yang dapat digunakan adalah MAX232. Keuntungan
tambahan dari MAX232 karena chip ini hanya membutuhkan tegangan
power suplay +5V, yang sama dengan sumber tegangan mikrokontroler
AVR, sehingga tidak perlu menggunakan dua jenis tegangan power
supplay yang berbeda. MAX232 mempunyai dua perangkat pengemudi
jalur yang masing-masing dapat mengirim dan menerima data. Pengemudi
jalur yang digunakan untuk mengirimkan data (TXD) disebut T1 dan T2,
dan pengemudi jalur untuk menerima data (RXD) ditandai sebagai R1 dan
R2.
2.10 MOTOR DIRRECT CURRENT (DC) [16]
Motor listrik merupakan perangkat elektromagnetis yang mengubah energi
listrik menjadi energi mekanik. Energi mekanik ini digunakan sebagai penggerak.
Motor DC memerlukan suplai tegangan yang searah pada kumparan medan untuk
diubah menjadi energi mekanik. Kumparan medan pada motor DC disebut stator dan
kumparan jangkar disebut rotor. Jika terjadi putaran pada kumparan jangkar dalam
pada medan magnet, maka akan timbul tegangan yang akan berubah-ubah arah pada
setiap setengah putaran, sehingga merupakan tegangan bolak-balik. Prinsip kerja dari
arus searah adalah membalik phasa tegangan dari gelombang yang mempunyai nilai
positif dengan menggunakan komutator. Dengan demikian arus yang berbalik arah
dengan kumparan jangkar yang berputar dalam medan magnet. Bentuk motor paling
41 Laporan Tugas Akhir BAB II
STT Telematika Telkom Purwokerto D310008
sederhana memiliki kumparan satu lilitan yang bias berputar bebas di antara kutub-
kutub magnet permanen. Bentuk fisik motor DC di tunjukan pada gambar 2.32
Gambar 2.32 Motor DC
Catu tegangan dc dari baterai menuju ke lilitan melalui sikat yang menyentuh
komutator, dua segmen yang terhubung dengan dua ujung lilitan. Kumparan satu
lilitan disebut angker dynamo. Angker dynamo adalah sebutan untuk komponen yang
berputar di antara medan magnet.
2.11 BUZZER / SPEAKER [12]
Dalam rangkaian ini, speaker digunakan sebagai indicator bahwa telah terjadi
hujan. Pada saat sensor hujan mendeteksi air hujan, maka sensor akan memberikan
tegangan pada mikrokontroler pada port yang sudah tersedia. Setelah mikrokontroler
menerima input dari sensor maka akan langsung diolah sesuai dengan program yang
sudah ada di dalam mikrokontroler tersebut, kemudian mikrokontroler akan
mengeluarkan output melalui port yang digunakan oleh speaker.
Speaker sendiri ialah sebuah komponen elektronika yang berfungsi untuk
merubah gelombang listrik menjadi gelombang suara atau bunyi, di dalam speaker
terdapat suatu magnet yang berfungsi menangkap sinyal-sinyal yang masuk berupa
gelombang listrik. Sinyal gelombang listrik inilah yang membuat fibra speaker
bergetar dan menghasilkan suara atau bunyi, di tunjukan pada gambar 2.33.
Gambar 2.33 Buzzer

42 Laporan Tugas Akhir BAB II
STT Telematika Telkom Purwokerto D310008
2.12 RELAY[10]
Relay merupakan suatu tombol elektrik yang bekerja berdasarkan prinsip
elektro magnet untuk menutup atau membuka kontak saklar secara otomatis. Relay
terdisi dari suatu lilitan dan switch mekanik. Switch mekanik akan bergerak jika ada
arus listrik yang mengalir melalui lilitan. Susunan kontak relay sebagai berikut :
1. Normally switch (NC) : COM akan terhubung apabila kumparan relay off.
2. Normally Open (NO) : COM akan terhubung apabila kumparan relay diberi
arus listrik.
3. Change Over Relay adalah kutub acuan (COM), memiliki kontak tengah yang
akan melepaskan diri dan membuat kontak lainnya terhubung.
Pada saat lilitan disuplai tegangan, maka arus akan mengalir pada kumparan,
sehingga pada inti besi yang dililit oleh kumparan akan timbul medan magnet.
Karena inti besi bersifat magnetis, maka jangkar akan tertarik ke inti besi sehingga
mengaktifkan kontak relay. Symbol dan bentuk fisik dari relay ditunjukan pada
gambar 2.34
Gambar 2.34 Simbol dan Bentuk Fisik Relay[10]
Berdasarkan jumlah kutub pada relay, maka relay dibedakan menjadi 4 jenis,
yaitu:
1. SPST atau single pole single throw
2. Spdt atau single pole double throw
3. Dpst atau double pole single throw
4. Dpdt atau double pole double throw
Pole adalah jumlah ommon dan throw adalah jumlah terminal output (NO dan NC)
dari relay. Skematik relay ditunjukan pada gambar 2.35.

43 Laporan Tugas Akhir BAB II
STT Telematika Telkom Purwokerto D310008
Gambar 2.35 Skematik Jenis Relay DPDT
2.13 MODEM WAVECOM FASTRACK M1306B[12]
Modem wavestrack adalah modem alat produksi dari Wavecom yang berupa
sebuah modem eksternal yang dijalankan dengan memasukkan sim card pada
modem tersebut kemudian dihubungkan pada port serial pada komputer server dan
kemudian akan dijalankan dengan menggunakan perintah – perintah AT-Command
yang khusus untuk menjalankan kerja dari Wavecom GSM modem ini. Wavecome
GSM modem ini mempunyai beberapa model fungsi yang dapat mengerjakan
beberapa kerja tertentu diantaranya untuk interface, standart, SMS, data, fax dan
voice. Bentuk fisik dari modem wavecom di tunjukan pada gambar 2.36.
Gambar 2.36 Modem Wavecom Fastrack M1306B [12]
Perintah – perintah AT-Command merupakan susunan karakter yang
membentuk suatu bahasa mesin yang dimengerti oleh GSM modem. Dimana setiap
perintah telah dideklarasikan untuk menjalankan salah satu tugas yang diinginkan.
Dengan kata lain AT-Command adalah satu-satunya perintah yang dapat dimengerti
oleh GSM modem ini.
DPDT
NC NC NC NC

44 Laporan Tugas Akhir BAB II
STT Telematika Telkom Purwokerto D310008
2.14 BAHASA C[7]
Bahasa pemrograman C dikenal di seluruh dunia sebagai bahasa pemrograman
yang andal, cepat dan tergolong ke dalam medium level language. Bahasa C
merupakan pengembangan dari bahasa (BCPL) Basic Combined Programming
Language yang dikembangkan oleh Martin Richards pada tahun 1967. Bahasa C
dikembangkan di Laboratorium Bell (USA) sekitar tahun 1972 oleh Dennis Ritchie,
beliau adalah seorang pakar pemrograman.
Pada tahun 1978, Dennis Ritchie bersama dengan Brian Kernighan
mempublikasikan buku yang kemudian menjadi legenda dalam sejarah
perkembangan bahasa C, yang berjudul The C Programming Language. Buku ini
diterbitkan oleh Prentice Hall. Seiring dengan berkembang pesatnya bahasa C,
banyak vendor mengembangkan compiler C menurut versi masing-masing.
Untuk dapat mengerti dengan bahasa C, terlebih dahulu harus mengerti dengan
strukur-struktur dari program. Apabila sudah mengerti dengan struktur-struktur yang
sesuai maka bisa menjalankan program dengan tidak mendapatkan kesulitan. Setiap
program C harus mengandung sedikitnya sebuah fungsi yang disebut dengan main ().
Suatu fungsi deprogram C dibuka dengan kurung kurawal “{“ dan ditutup dengan
kurang kurawal tutup “}”. Di antara kurung-kurung kurawal dapat dituliskan statmen
program C.
Struktur Pemrograman Bahasa C pada Arduino
Struktur dasar bahasa pemrograman Arduino terdiri dari dua bagian yaitu :
Void setup()
{
// Statement; perintah untuk eksekusi satu kali
}
Void loop()
{
// Statement; perintah untuk eksekusi terus menerus
}
a. Setup()
Fungsi setup() hanya dipanggil satu kali ketika program pertama kali
di jalankan. Ini digunakan untuk mendifinisikan mode pin itu memulai

45 Laporan Tugas Akhir BAB II
STT Telematika Telkom Purwokerto D310008
komunikasi serial. Fungsi setup() harus di ikut sertakan dalam program
walaupun tidak ada statement yang di jalankan.
b. Loop()
Setelah melakukan fungsi setup() maka secara langsung akan
melakukan fungsi loop() secara berurutan dan melakukan instruksi-
instruksi yang ada dalam fungsi loop().
2.14.1 Algoritma Program
Dalam pemograman, terdapat tahapan-tahapan seperti flowchart berikut ini :
Start
New Poject pada Code
Vision AVR
Penulisan Source Code
Program
Compile
Debug Terdapat
Kesalahan
Download
Program
Finish
Yes
No
Penulisan Source Code
Program
Gambar 2.37 Flowchart Tahapan Penulisan Program
Dari gambar flowchart diatas , dapat dijelaskan bahwa dalam penulisan
program, dimulai dengan membuat proyek baru, kemudian menuliskan kode
sumber program, setelah selesai menulis program, dilanjutkan dengan compile dan
debug. Jika dalam proses debug terdapat kesalahan, maka dilakukan perbaikan

46 Laporan Tugas Akhir BAB II
STT Telematika Telkom Purwokerto D310008
penulisan program. Jika tidak terdapat kesalahan, dilanjutkan tahap download
program ke dalam mikrokontroler.
Blok diagram pengiriman Short Message Service (SMS) yang diharapkan
dalam alat pelindung hujan otomatis yang dikendalikan mikrokontroler ATMega 8
dengan report Short Message Service (SMS) ditunjukan pada gambar 2.38.
Gambar 2.38 Flowchart Pengiriman SMS
Start
Finnish
hhhhh
Hujan
berhenti?
Hujan
turun ?
Motor bergerak
membuka atap
Modem mengirim SMS
(Short Message Service)
Modem mengirim SMS
(Short Message Service)
Buzzer aktif
Motor bergerak
menutup atap
Sensor hujan
47 Laporan Tugas Akhir BAB II
STT Telematika Telkom Purwokerto D310008
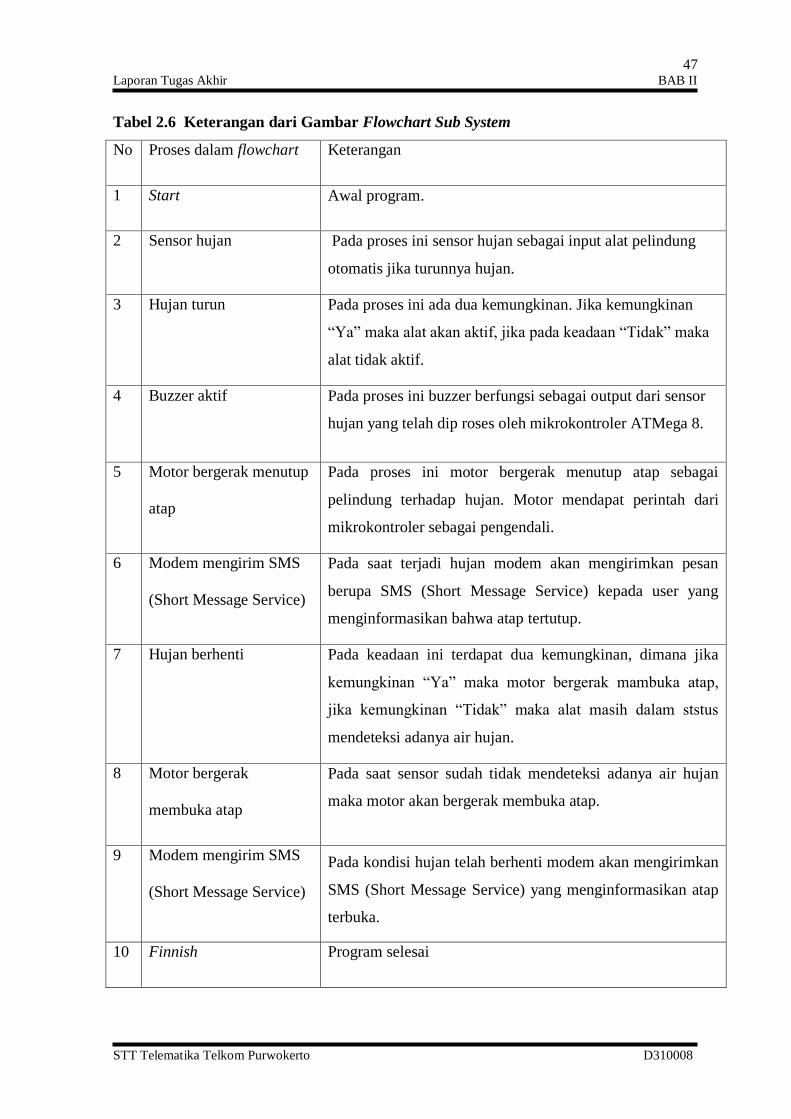
Tabel 2.6 Keterangan dari Gambar Flowchart Sub System
No Proses dalam flowchart Keterangan
1 Start Awal program.
2 Sensor hujan Pada proses ini sensor hujan sebagai input alat pelindung
otomatis jika turunnya hujan.
3 Hujan turun Pada proses ini ada dua kemungkinan. Jika kemungkinan
“Ya” maka alat akan aktif, jika pada keadaan “Tidak” maka
alat tidak aktif.
4 Buzzer aktif Pada proses ini buzzer berfungsi sebagai output dari sensor
hujan yang telah dip roses oleh mikrokontroler ATMega 8.
5 Motor bergerak menutup
atap
Pada proses ini motor bergerak menutup atap sebagai
pelindung terhadap hujan. Motor mendapat perintah dari
mikrokontroler sebagai pengendali.
6 Modem mengirim SMS
(Short Message Service)
Pada saat terjadi hujan modem akan mengirimkan pesan
berupa SMS (Short Message Service) kepada user yang
menginformasikan bahwa atap tertutup.
7 Hujan berhenti Pada keadaan ini terdapat dua kemungkinan, dimana jika
kemungkinan “Ya” maka motor bergerak mambuka atap,
jika kemungkinan “Tidak” maka alat masih dalam ststus
mendeteksi adanya air hujan.
8 Motor bergerak
membuka atap
Pada saat sensor sudah tidak mendeteksi adanya air hujan
maka motor akan bergerak membuka atap.
9 Modem mengirim SMS
(Short Message Service)
Pada kondisi hujan telah berhenti modem akan mengirimkan
SMS (Short Message Service) yang menginformasikan atap
terbuka.
10 Finnish Program selesai

48 Laporan Tugas Akhir BAB II
STT Telematika Telkom Purwokerto D310008
2.15 BAHASA AT COMMAND[12]
AT Command adalah perintah yang digunakan dalam komunikasi dengan serial
Port. Dengan AT Command kita dapat mengetahui vendor dari handphone,
mengetahui kekuatan sinyal, membaca pesan SMS, mengirim SMS, menghapus
pesan dan masih banyak lagi. Beberapa hal yang perlu diperhatikan dalam
menggunakan AT Command adalah, Command apa yang harus dimasukkan ke
terminal, langkah apa yang harus dilakukan setelah command dimasukkan dan
respon yang didapat setelah command dimasukkan. Tidak semua AT Command
memiliki tindakan dan respon yang sama. Handphone GSM dan modem dapat
dioperasikan melalui remote control menggunakan Port serial (kabel Data atau
koneksi infra red), bluetooth, atau usb, akan tetapi semua antarmuka tersebut akan
dikenali oleh komputer sebagai Serial Port. Remote Control di-implementasikan
melalui bahasa AT+C Command menurut spesifikasi dari ETSI GSM 07.07 dan
GSM 07.05. AT Command merupakan kepanjangan dari attention command, dan
selalu digunakan untuk memulai pengiriman baris perintah dari Terminal Equipment
(TE) kepada Terminal Adaptor (TA). Contoh TE adalah komputer, sedangkan contoh
TA adalah GSM Data Card. Baris perintah terdiri dari karakter string
(alphanumeric) yang dikirimkan kepada modem untuk melakukan perintah tertentu.
AT Command digunakan untuk mengoperasikan modem, dengan fungsi secara umum
adalah sebagai berikut :
Konfigurasi dan mengkontrol dari dan ke jaringan GSM.
Konfigurasi koneksi Modem melalui antarmuka Serial RS-232.
Memperoleh status informasi dari jaringan GSM.
AT Command dapat dipergunakan untuk mengistruksikan perintah mengirim
SMS dan menerima SMS seperti yang akan dilakukan alat agar dapat menerima
pesan sesuai yang diinginkan. Untuk dapat menerima SMS dari Handphone
pengirim ke modem penerima dalam pembuatan alat ini menggunakan dua perintah
yang telah ditentukan sebelumnya yaitu sebuah perintah AT+CMGR dan
AT+CMGD. Ini merupakan perintah untuk membaca SMS yang masuk dan untuk
AT+CMGD yaitu perintah untuk menghapus pesan. Adapun format pengiriman SMS
dengan menggunakan AT+CMGR (“Nomer Tujuan”) dilanjutkan dengan isi SMS
yang akan dikirimkan. Selain itu AT Command juga dapat dipergunakan untuk

49 Laporan Tugas Akhir BAB II
STT Telematika Telkom Purwokerto D310008
melakukan uji coba terhadap modem yang dipergunakan dalam keadalain baik atau
tidak. Untuk dapat melakukan ini dapat dipergunakan sebuah aplikasi yaitu Simple
therm Untuk dapat melakukan ini hanya diperlukan untuk membuka Simple therm
dan pasangkan modem pada komputer atau laptop yang dipergunakan untuk uji coba
modem. Ketikan “AT” pada Simple therm, jika muncul “OK” ini menandakan
modem yang akan dipergunakan dalam keadaan bagus.
Jadi AT Command inilah bahasa yang dipahami oleh modem. Untuk memulai
suatu perintah AT Command, diperlukan prefiks “AT” atau “AT” dalam setiap
perintah AT Command, dan diakhiri dengan ”<CR>” (= 0x0D). Beberapa perintah
AT Command dapat dituliskan pada baris yang sama dengan hanya menggunakan
satu prefiks “AT” atau “AT”, kemudian antar perintah dibatasi oleh karakter “;”.
Beberapa perintah AT Command yang digunakan untuk keperluan SMS (pengiriman
dan penerimaan) adalah sebagai berikut :
2.15.1 At+Cmgs
Perintah AT Command ini digunakan untuk mengirimkan SMS.
Format yang digunakan adalah “AT+CMGS = <length> <CR> <PDU is
given>”. Apabila pengiriman sukses dilakukan, format respon yang diterima
adalah “+CMGS : <mr>”, dengan “<mr>” adalah message reference dari
SMSC. Sedangkan jika pengiriman gagal dilakukan, respon yang diterima
adalah “+CMS error ”.
2.15.2 At+Cmgr
Perintah ini digunakan untuk membaca sebuah pesan pada indeks
tertentu. Format yang digunakan adalah “AT+CMGR = <index>”. Apabila
perintah ini berhasil dieksekusi, format respon yang diterima adalah
“+CMGR: <stat>,,<length><CR><LF><pdu>”. “<stat>” berarti status,
parameter status pesan adalah sebagai berikut :
Perintah ini digunakan untuk membaca sebuah SMS pada program AT
Command adalah :
Pesan yang diterima dan belum dibaca, merupakan parameter standar
adalah 0.
Pesan yang diterima dan sudah dibaca adalah 1.

50 Laporan Tugas Akhir BAB II
STT Telematika Telkom Purwokerto D310008
Pesan tersimpan pada memory SMS yang tidak terkirim adalah 2.
Pesan tersimpan pada memory SMS yang berhasil dikirimkan adalah 3.
Semua pesan pada memory SMS adalah 4.
2.15.3 At+Cmgd
Perintah ini digunakan menghapus sebuah SMS pada memory SMS.
Format yang digunakan adalah “AT=CMGD=<index>”, respon yang
diterima adalah “OK/ERROR /+CMS ERROR ”
2.15.4 At+Cmgl
Perintah ini digunakan untuk membaca daftar SMS sesuai parameter
tertentu. Format AT yang digunakan adalah “AT+CMGL [=<stat>]”.
parameter status pesan adalah sebagai berikut :
Pesan yang diterima dan belum dibaca, merupakan parameter standar
adalah 0
Pesan yang diterima dan sudah dibaca adalah 1.
Pesan tersimpan pada memory SMS yang tidak terkirim adalah 2.
Pesan tersimpan pada memory SMS yang berhasil dikirimkan adalah3.
Semua pesan pada memory SMS. Respon yang diterima adalah 4.
Apabila semua pesan telah terkirim maka sintak yang muncul adalah
sebagai berikut :
“+CMGL:<index>,<stat>,<oa/da>,[<alpha>],[<scts>][,<tooa/toda>,<le
ngth>]<CR><LF><Data>[<CR><LF>
+CMGL:
<index>,<stat>,<da/oa>,[<alpha>],[<scts>][,<tooa/toda>,<length>]<
CR><LF>
<Data>[...]] OK ”
Atau “+CMS ERROR : <err>”. “[<alpha>]”, adalah deretan
alfanumerik yang merepresentasikan nomor pengirim atau penerima. Yang
terpenting adalah mengetahui perintah AT Command untuk terima, kirim,
dan delete SMS. Kemudian perintah tersebut dimasukkan ke dalam coding
program yang telah di buat.

51 Laporan Tugas Akhir BAB II
STT Telematika Telkom Purwokerto D310008
2.16 PROGRAM ARDUINO 0022 ATMEGA 8[8]
Arduino merupakan pengendali mikro single board yang bersifat open source
yang dirancang untuk memudahkan penggunaan elektronik dalam berbagai bidang.
Untuk arduino terdiri dari hadware dan software dimana arduino memiliki bahasa
pemrograman sendiri. Pada hadware-nya sendiri terdiri dari mikrokontroler dan
komponen elektronik lain sebagai tambahan. Hardware dari arduino memiliki
prosesor Atmel AVR. Untuk software arduino yang berupa (IDE) Integrated
Devolpment Environment yang memiliki text editor yang digunakan untuk menulis
program. Pada Gambar 2.39 merupakan tampilan IDE arduino.
Gambar 2.39 Tampilan IDE Arduino.
Pada Gambar 2.39 ada area yang berwarna putih yang digunakan untuk
menulis program. Kemudian ada area yang berwarna hitam yang disebut sebagai
progres area dimana progres digunakan untuk menampilkan pesan sukses ataupun
pesan error.
2.16.1 Melakukan Compile Program pada IDE
Untuk dapat menghasilkan program dengan ekstensi *.hex, harus
melakukan compile program yang telah dibuat. Program dengan ekstensi
*.hex merupakan program yang nantinya akan di-download ke dalam alat

52 Laporan Tugas Akhir BAB II
STT Telematika Telkom Purwokerto D310008
dengan menggunakan software download mikrokontroler dan juga
menggunakan alat yang sering disebut dengan downloader. Untuk
memperoler program *.hex dapat dilakukan dengan cara berikut :
a. Buka program yang telah dibuat Klik tombol verify yang terdapat
pada toolbar yang berfungsi sebagai pengecekan apabila terjadi error
pada program tersebut. Apabila tidak terdapat error pada program,
maka bisa langsung di Upload ke alat dengan cara klik Upload.
Tampilan program display di tunjukan pada gambar 2.40.
Gambar 2.40 Tampilan Program Display
b. Apabila pada program tersebut masih terdapat error, maka IDE akan
menamplkan error tersebut. Error compile yang terjadi pada serial
port belum diatur serial port pada comp. tampilan error pada saat
compile ditunjukan pada gambar 2.41.
Gambar 2.41 Error pada saat Compile

53 Laporan Tugas Akhir BAB II
STT Telematika Telkom Purwokerto D310008
Untuk memperbaiki error yang terjadi pada gambar 2.41 Dapat
dilakukan dengan cara klik pada menu tools pilih serial port.
Tampilan serial port pada menu program ditunjukan pada gambar
2.42.
Gambar 2.42 Tools Serial Port
c. Melakukan kompilasi kembali setelah mengkoreksi kesalahan yang
terjadi.
b. Jika program sudah sesuai dan sudah tidak terjadi kesalahan maka
akan tampil pada bagian hitam yang ditunjukan pada gambar 2.43.
Gambar 2.43 Down Uploading
54 Laporan Tugas Akhir BAB II
STT Telematika Telkom Purwokerto D310008
2.15.2 Download Program ke ATMega 8
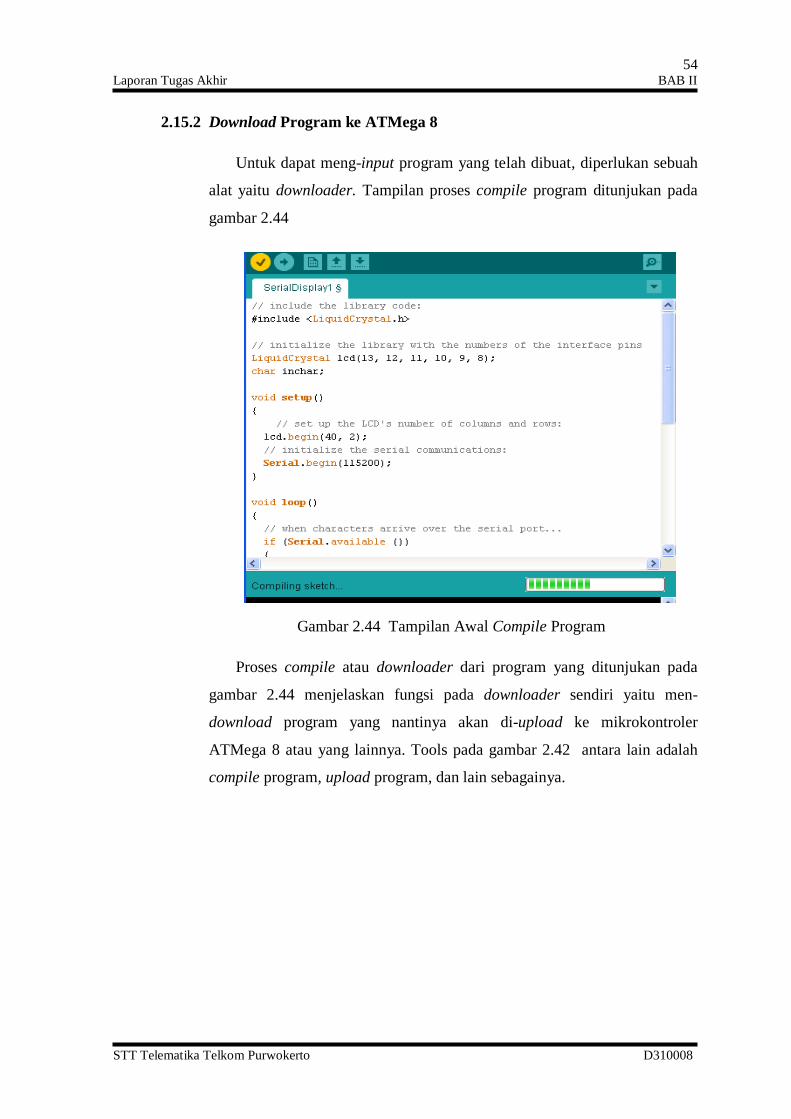
Untuk dapat meng-input program yang telah dibuat, diperlukan sebuah
alat yaitu downloader. Tampilan proses compile program ditunjukan pada
gambar 2.44
Gambar 2.44 Tampilan Awal Compile Program
Proses compile atau downloader dari program yang ditunjukan pada
gambar 2.44 menjelaskan fungsi pada downloader sendiri yaitu men-
download program yang nantinya akan di-upload ke mikrokontroler
ATMega 8 atau yang lainnya. Tools pada gambar 2.42 antara lain adalah
compile program, upload program, dan lain sebagainya.
Top Related
Copyright © 2022 FDOKUMEN

