







Bahasa
Halaman
Hukum

Geoforum 39 (2008) 625–642www.elsevier.com/locate/geoforum
Available online at www.sciencedirect.com
Discrete-element, individual-based and agent-based models:Tools for interdisciplinary enquiry in geography?
Mike Bithell ¤, James Brasington, Keith Richards
Department of Geography, University of Cambridge, Cambridge CB2 3EN, United Kingdom
Received 11 May 2006; received in revised form 30 October 2006
Abstract
Discrete-element, individual-based and agent-based modelling techniques represent the interactions of individuals or entities with oneanother and their environments by sets of computational rules. These methods are now being used in geophysics, ecology, zoology, andincreasingly in the social sciences. A characteristic is that the “agents” are embedded in an environment with which they interact, so thatjoint evolution of physical, ecological and socio-economic systems can be studied; this makes them of interest in integrated geographicalinvestigation. Of particular interest is the fact that they allow the study of macro-scale emergent behaviour generated by multiple individ-ual actions. Discrete techniques have the potential to create integrated models that cross disciplines. Similar computational methods canbe employed to control the spatial search process, deal with irregular or changing boundaries, and to track the evolution of systems wherepreservation of heterogeneity across space and time is important. The complex series of feedbacks between the diVerent types of systemcan thus be modelled within a single computational framework. Humans modelled in this way as “agents” can allow the collective eVectof many interacting individuals to generate emergent structures at the community scale. The structural characteristics of their social andnatural environments will inXuence their behaviour, while at the same time constituting emergent consequences of their actions. The prin-cipal challenge of the latter is to Wnd those sets of rules that represent the beliefs and desires of real human agents, accurately reXecting thecultural context, while allowing us to explore the social and economic limitations of agents to take action. This paper reviews and illus-trates discrete methods applicable to a range of geographical enquiries, and with particular reference to individual- and agent-basedmethods, assesses the rich diversity of approaches that must be combined to take full advantage of their potential to explore interactionsof social and environmental processes.© 2006 Elsevier Ltd. All rights reserved.
Keywords: Discrete-element model; Individual-based model; Agent-based model; Environment; Society
1. Individual entities and emergent systems
In the 1970s, a brief Xirtation occurred with the conceptof time geography (Carlstein et al., 1978), or more strictly,space–time geography, in which individuals’ life experi-ences were tracked and indeed, mapped, as they movedthrough space and time at diVerent scales. This explicitlyconnected people with places and with space, in their inter-actions with other individuals and with their environments.Time geography was rich with theoretical promise, but at
* Corresponding author.E-mail address: [email protected] (M. Bithell).
0016-7185/$ - see front matter © 2006 Elsevier Ltd. All rights reserved.doi:10.1016/j.geoforum.2006.10.014
the time was limited by empirical, analytical and represen-tational constraints; it was then impossible to map andassess more than a very few peoples’ life traces in 4-Dspace–time in a meaningful way. Time geography fadedsomewhat from view, therefore. Since the 1990s, however,the opportunity to revisit time geographies has developedconsiderably, since the tools to analyse and representmultiple life traces now exist, in the emergent Weld of socialsimulation (Gilbert and Conte, 1995; Batty, 2005). ThisWeld has close connections with the development of alliedapproaches in other disciplines, where there is similar con-cern with the interacting behaviour of very large numbersof individual entities. This paper aims to review these

626 M. Bithell et al. / Geoforum 39 (2008) 625–642
related developments, and the opportunities they presentfor some new common ground deWned by their methodo-logical commonalities. Indeed, they oVer opportunities tomodel combinations of human behaviour with other bio-logical entities (animals and plants) and with artefacts andinanimate objects. They include discrete-element, individ-ual-based, and agent-based modelling methods, which haveall developed to oVer computational approaches to themodelling and simulation of interaction amongst many dis-crete individuals, and amongst those individuals and theirsurroundings.
Often in the representation of physical systems, mathe-matical models assume spatial continuity, but this continu-ity is itself an approximation. In representing a XowingXuid, for example, the mathematical expressions of contin-uous Xuid properties such as temperature, pressure, density,velocity etc. are statistical averages over large numbers ofentities; that is, atoms or molecules. This averaging dependson the idea that individual diVerences between the constitu-ents of the Xuid are not signiWcant, and that one can aver-age over a region that is large compared to the atomic scale,but without smoothing over regions so large that diVer-ences in macroscopic Xuid motions are erased (Batchelor,1967). Computational models then have to break up thecontinuous Xuid into discrete elements of one kind oranother to make approximations to these averages. Thisdiscretization itself then makes the modelling of Xow pro-cesses problematic, as it may introduce phenomena (depen-dent on the scheme of discretization adopted) that are notpresent in the (already approximate) continuous equations(Oran and Boris, 2001). The necessity to treat the systems inthis way arises essentially because the discrete units (atomsor molecules) comprising the system are so numerous.However, in the macroscopic world the numbers of discreteentities is often drastically reduced. For example, in a riverreach a few kilometres in length, and a few tens of metreswide, we might Wnd of order 1011 mobile particles in theriver bed, if the mean size of particles is of order 0.01 m, andassuming the depth of the active layer is about a metre. Inthe same reach, there might be a few hundred thousandtrees (Pacala et al., 1996), but only a few hundreds of people(see the discussion of individual-based models and land-usechange below). Thus, the number of entities tends todecrease to tractable values as the complexity of the indi-viduals increases.
Thus, when considering systems at the human scale, dis-crete techniques begin to look attractive. It becomes possi-ble to consider the idea of making models of systems ofgeographical interest where each entity (individual) in thesystem is explicitly represented. This explicit representationhas a number of advantages computationally. Digital com-puters handle discrete systems in a natural way, and whenthe computational model, and the system it represents, areboth built from easily identiWable discrete components, themapping between system and model can be made simplerand easier to understand. This is useful for investigatingreasons why the model produces particular behaviour, as,
for example, with expert systems (Russell and Norvig,2003), and in cases where it is important to be able toexplain the operation of a model to stake-holders involvedin developing the original model speciWcation (Moss andEdmonds, 2005). Aspects of numerical accuracy of thecomputation may also be potentially improved. For exam-ple, the so-called “atto-fox” problem (Mollison, 1991), inwhich a continuous approximation to a discrete populationcan lead to a modelled resurgence of infection (rabies),apparently from regions that have a population of less thanone fox (!), is completely avoided by explicitly modellingdiscrete individuals.
Many of the techniques and data structures used tomodel one discrete system are useful in other contexts. Anexample is searching for neighbours. When items are scat-tered in irregular positions over a two- or three-dimen-sional space, the search for those items that are spatiallyclosest can be carried out in a variety of ways, some ofwhich are more eYcient than others. Reasons for the searchmay vary; in the discrete-element case (see Section 3 below), we need to search for collisional interactions, whereas inan agent-based model human agents might be looking fortrees suitable as fuel. In either case, the generic computa-tional search process is the same. Additionally, the use ofdiscrete moving entities allows for irregular or movingboundaries to be easily handled, something that is diYcultwith Wnite-diVerence models that seek to represent popula-tions of individuals as a density Weld on a Wxed computa-tional grid. Finally, the full heterogeneity of social andecological systems can also be represented, without theneed to consider systems simply in terms of aggregatebehaviour, or representing the behaviour of individuals asidentical to the mean. Discrete methodologies thus allow usto use a single framework for spatially extended structures,including atmospheric Xow, river evolution, hazard model-ling (such as debris Xow), ecological models and socio-eco-nomic systems. By incorporating the physical, ecologicaland social models in a single computational frame, theinteractions and feedbacks between each type of system canbe explicitly examined and a better representation of thetotal system can be achieved.
The conceptual side of modelling is of at least equalimportance to the computational. Table 1 lists examplesthat share a number of common characteristics that makemodelling using discrete entities conceptually advanta-geous. These include:
(i) that they consist of many interacting entities, withinteractions that are in general non-linear;
(ii) that global structures emerge from, and form theframework for, the interactions;
(iii) that rules governing global scale structures areunknown or diYcult to deduce directly; and
(iv) that although the detailed properties of individualentities may be known, the consequences of theirinteractions are diYcult to deduce other than byexplicit modelling.

M. Bithell et al. / Geoforum 39 (2008) 625–642 627
The last comment is generally true even where the sys-tem can be observed in detail – the subtle interplay of causeand eVect, and the presence of multiple feedbacks betweenthe actions of one entity and another, can make the mecha-nisms that drive the evolution of the system as a whole hardto understand without the guidance of a model. This hasadded force for geographical systems where direct experi-ments may be diYcult, impossible, or, in social and ecologi-cal systems, perhaps unethical. We have, for example, noway to control and observe rivers, forests or cities on time-scales of hundreds of years, but we can make models thatsimulate such time-scales. Patterns generated by interac-tions within the model might then be testable by observa-tion of the real-world system (Grimm and Railsback, 2005).
In the following discussion we use examples to illustratethe possibilities oVered by modelling discrete entities, usingcases that exemplify increasing levels of complexity. Webegin by brieXy outlining tracers of Xuid Xow, moved by theXuid velocity Weld. Such cases provide examples of the larg-est systems simulated to date by discrete methods. The nextsection provides an example of discrete-element modelling,where the motion of the particles is driven by gravity andboundary forces, and by the dynamical interaction of theparticles themselves. These particles are still relatively sim-ple, interacting purely through physical forces. A thirdexample introduces the notion of individual-based modelsin ecology, and shows how we can link together representa-tions of the physical environment (here hydrology and itsrelation to rainfall, slope, land-cover and soil characteris-tics), with dynamical models of forest evolution, andresource requirements for subsistence farming, to makeintegrated models of the impacts of land use. The Wnalexample takes up the idea of subsistence farming and showshow we can make a more detailed model of farmer behav-iour coupled to the eVects of rainfall, including studying the
potential beneWts (or otherwise) of seasonal rainfall fore-casting. Following these examples we present a moredetailed discussion of agent-based models in general, toillustrate their potential for aiding the understanding ofmore complex social systems, and for integrating not onlysocial and environmental phenomena, but also a variety ofsocial science methodologies in what may be conceived asspace–time geographies.
2. Fluid advection
Fluid motion, in which tracer particles are moved pas-sively by the Xow, is perhaps the simplest way in which dis-crete particles are used in computational models, and hasbeen exploited in Xuid Xow modelling of the atmosphereand ocean and in other geophysical situations. The idea isto take a pre-existing Xow for which the velocity is alreadyknown at a set of points, these usually being distributed ona grid over the domain of study, in either two or threedimensions. The Xow Weld is then used to transport a set ofparticles, which simply follow the local speed and directionof the Xow interpolated (usually linearly) from the grid tothe particle position. These particles are in a sense tracers ormarkers – they represent a small parcel of the Xuid, and areused as discrete entities which track the Xuid’s motion. Thisallows the motion of, for example, polluted or chemicallyactive air to be tracked across the globe (Bithell et al., 2000;Stohl et al., 2002). Although a simple idea, the tracks of the‘particles’ are generally complex, especially if the Xow Weldis changing with time, and the resulting motions cannot beanticipated beforehand. Because the particle motion is easyto calculate and the ‘particles’ are very simple, very largenumbers can be accommodated; recent geophysical exam-ples simulating motion in a subduction zone have used upto a billion particles (Rudolph et al., 2005). The method is
Table 1Examples of problems involving discrete entities, listed roughly in order of increasing complexity, but decreasing numbers per unit area
Discrete element models Fluid advection Bithell et al. (2000)Stohl et al. (2002)Cleary and Prakash (2004)
Gravel-bed rivers Heald et al. (2004)Avalanches and debris Xows Richards et al. (2004a)
Individual-based modelling Foraging Grimm and Railsback, 2005Flocking Mogilner et al. (2003)
Helbing (2001)Predator-prey Rand and Wilson (1995)
Grimm and Railsback (2005)Forest simulation Pacala et al. (1996)
Chave (1999)
Agent-based models Escape from buildings, etc Helbing et al. (2000)Subsistence farming Ziervogel et al. (2005)TraYc simulations Cetin et al. (2002)
Helbing (2001)Nagel et al. (1997)
Urban Populations Benenson and Torrens (2004)Fully coupled environment-social systems Epstein and Axtell (1996)
Linderman et al. (2005)Matthews (2006)

628 M. Bithell et al. / Geoforum 39 (2008) 625–642
useful for hazard modelling, particularly where transport ofpollutants is involved. Many models that address suchproblems exist; atmospheric applications can be found onthe USEPA (2006) and the ETC/ACC (2006) web-sites.Discrete emission and transport models such as CALPUFF(Gilliam et al., 2005), HYSPLIT (Draxler and Hess, 1998)and NAME (Ryall and Maryon, 1998; Maryon and Best,1995) have been used to examine such diverse issues as theXow of debris from the destruction of the World TradeCentre, transport of volcanic ash, and propagation ofradioactive emissions. Jerrett et al. (2005) have reviewed theuse of such models in health studies.
These particle methods can also be extended to simulatethe full Xow dynamics (Koumoutsakos, 2005). For three-dimensional modelling, one of the most successful particlemethods is that known as smooth-particle hydrodynamics(Monaghan, 2005). This method has been used to investi-gate dam bursts, tsunamis and even lava Xows over realisticterrain (Cleary and Prakash, 2004). Because of its ability todeal with irregular landforms, it constitutes a potentiallypowerful way to incorporate the dynamical modelling ofhazard generation and evolution with ecological andhuman occupation of the landscape.
3. Discrete-element modelling
Discrete-element modelling (often abbreviated to DEM;confusingly the same acronym also gets used for DigitalElevation Models) adds a dynamical element to the motionof particles that allows for the study of particulate pro-cesses such as debris Xows, rock fall, and coarse bed mate-rial transport in rivers and on beaches. The dynamicalelements in a DEM are representations of identiWable dis-crete particles – individual sand grains, gravel particles,rock fragments or boulders. The approximation in suchmodels lies in the laws through which the particles interact(as the detailed elastic and frictional properties of the parti-cles are often poorly known), and in the way in which theshapes of the particles are treated. In the simplest cases par-ticles are treated as identical smooth spheres (possibly ofdiVering size and density), or even as two-dimensional discs,and collisions are assumed to take place as if the particlesare coated with linear springs. Even so, the results of manycolliding particles lead to complex paths being followedthat cannot be anticipated without full model integration.The technique has been used to model a wide range of geo-physical and other situations (Richards et al., 2004a),including those where the particles are embedded in and areadvected by a Xuid, but where the inter-particle interactionsare also important, as, for example, in gravel-bed rivers(Heald et al., 2004).
A classic problem that can be examined using DEM isthat of size segregation in a particle mass, where initiallywell-mixed grains of diVerent sizes become separated underthe action of gravity. This phenomenon is observed in sev-eral natural contexts; in periglacial environments where sizesegregation occurs with freeze–thaw processes in soils, and
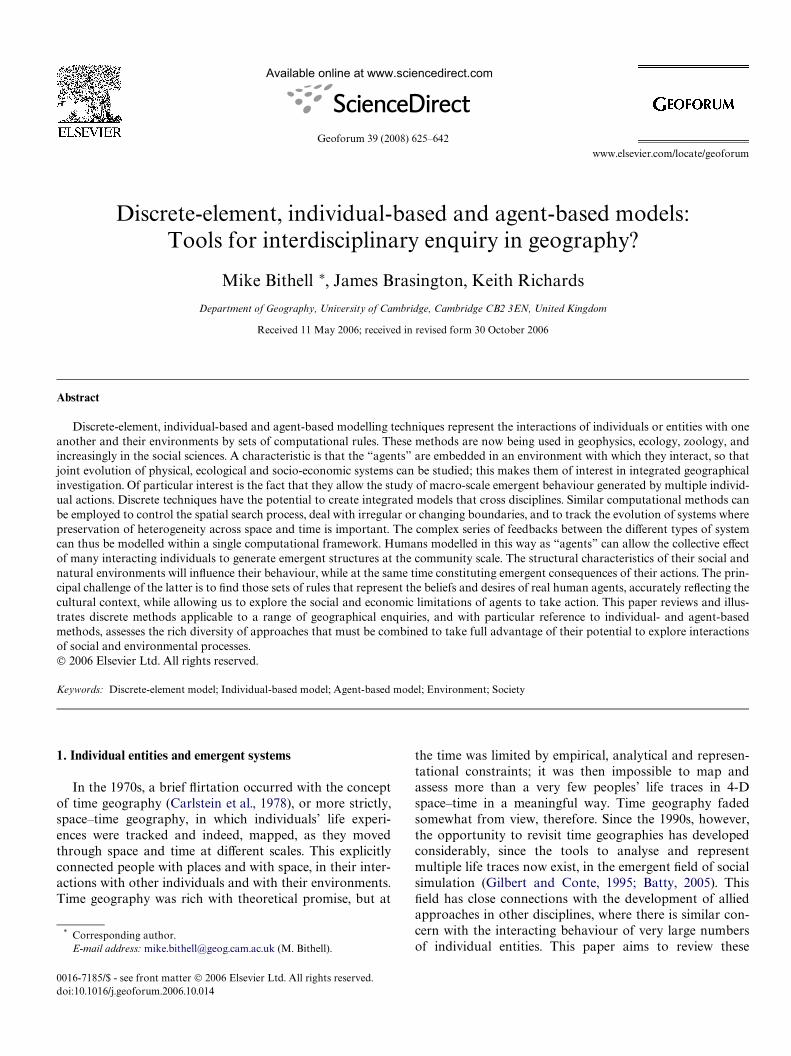
in debris Xows where coarse particles concentrate at thesurface, for example. Such systems are diYcult to simulatein full detail, and outcomes can be diYcult to test againstreal-world situations. To examine some of the mechanismsthat might be causing this phenomenon, we thereforelooked at a simpliWed case in which we could undertakelaboratory experiments, and test matching discrete-elementsimulations against them. In the experiments, a cylindricalcontainer of radius 0.08 m and height 0.3 m was Wlled withgravel, placed on a vibrating table and shaken horizontallyat a frequency of 50 Hz with an amplitude of 0.002 m. Afterabout 800 seconds, a spherical indicator particle, initiallyplaced 0.15 m below the surface, emerged spontaneously atthe upper surface, near the centre of the cylinder (Fig. 1).The question is, then, how the horizontal shaking motiongives rise to systematic vertical displacement of particles inthe cylinder. We may hypothesize two possible explana-tions for this behaviour. The Wrst is the so-called ‘brazil nut’eVect (Möbius et al., 2001). This is a size segregation phe-nomenon in which the larger particles in a mixture “Xoat”to the top under the inXuence of shaking or other repeateddisturbance (as when the nuts in breakfast cereal concen-trate near the top of the packet;). The mechanism is one inwhich the disturbance of the mass leads to opening of gapsin the unsorted material, through which the smaller parti-cles are able to fall in preference to the larger. Once a layerof small particles begins to accumulate, these particles thenexpel the remaining larger ones from the lower region ofthe material.
However, a second mechanism may be important insome circumstances, and this is the occurrence of large-scale convective motion. In this case, the whole mass ofmaterial moves in a convective cell, with rising motion inthe centre and descent near the edges of the cylinder. Byusing a model of the situation, we are able to deduce thatthe latter is the most likely explanation for the experimentalobservation, and to tease out aspects of the mechanism bywhich it occurs. Approximately 400 discs of varying size(from 2 to 16 mm in diameter), together with a larger(50 mm diameter) indicator disc 0.15 m below the free sur-face, were introduced into a 2-D rectangular container,whose walls and Xoor were vibrated in the model, as in thelaboratory experiment. Fig. 1 compares the time trace forthe indicator particle in both the experiment and thenumerical simulation. In the numerical model, as in theexperiment, it proved possible to bring the indicator sphereto the surface (Figs. 1 and 2). However, initial attempts todo so had diYculty in making the indicator sphere rise, inspite of persistent shaking of the container walls. It becameclear that the horizontal movement of the base was a criti-cal component for driving the motion. The latter couldclearly only be eVective through frictional drag forcesbetween the lowest layer of particles and the container base.Simulations showed that the friction between particles andwalls was also required. With friction at the boundaries, alarge-scale convective motion was observed, with an overallrising motion in the centre and descent at the edges.
M. Bithell et al. / Geoforum 39 (2008) 625–642 629
The mechanism appeared to be as follows: initially theparticles were close-packed, but as the frictional forces onthe base moved the lowest particles sideways relative tothose above, the motion forced dilation of the lower layers(Reynolds dilatancy). Because of the wall friction, this dila-tion was strongest near the centre of the container andweakest at the walls. The dilation led to a doming of thesurface in the centre (observed both in the model and theexperiments), and the shaking then induced avalanching ofsurface material from the centre of the cylinder toward theedges, where it was entrained back into the particle mass.The result is that boundary friction drove a global convec-tive cell in the whole container, eventually bringing the indi-cator particle to the surface. The fact that absence ofboundary friction was not in general associated with parti-cle segregation showed that in this particular case, the ‘bra-zil nut’ eVect was unlikely to be the dominant cause of theexperimental observations.
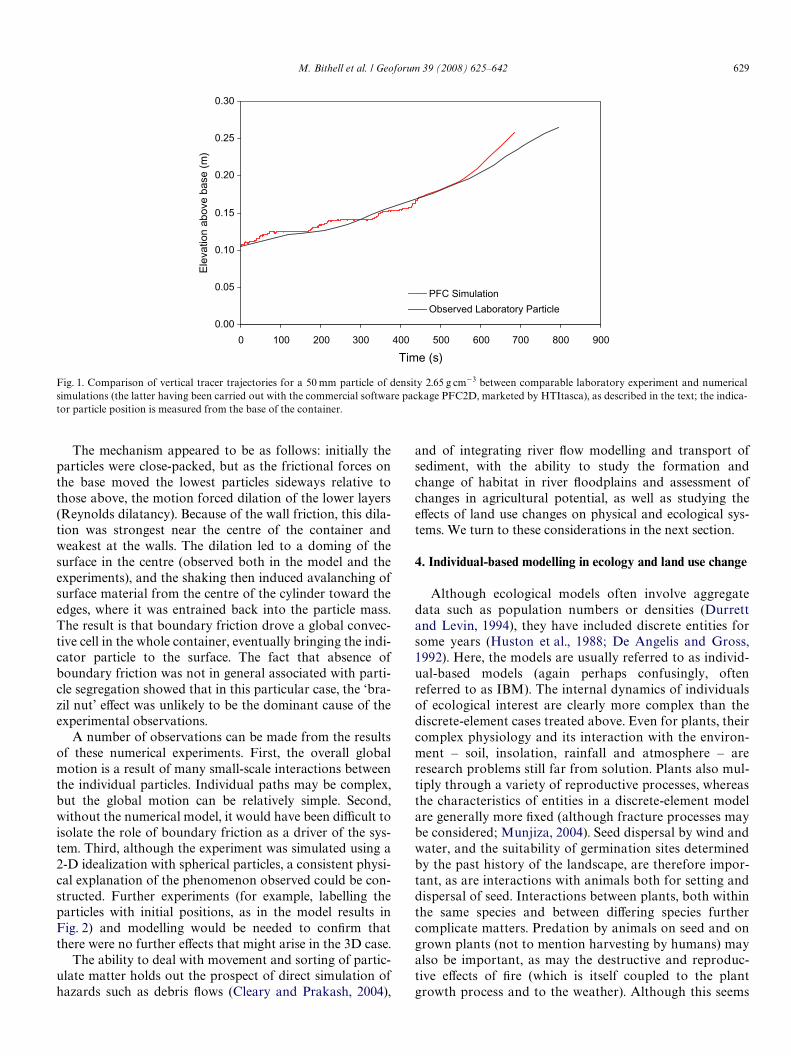
A number of observations can be made from the resultsof these numerical experiments. First, the overall globalmotion is a result of many small-scale interactions betweenthe individual particles. Individual paths may be complex,but the global motion can be relatively simple. Second,without the numerical model, it would have been diYcult toisolate the role of boundary friction as a driver of the sys-tem. Third, although the experiment was simulated using a2-D idealization with spherical particles, a consistent physi-cal explanation of the phenomenon observed could be con-structed. Further experiments (for example, labelling theparticles with initial positions, as in the model results inFig. 2) and modelling would be needed to conWrm thatthere were no further eVects that might arise in the 3D case.
The ability to deal with movement and sorting of partic-ulate matter holds out the prospect of direct simulation ofhazards such as debris Xows (Cleary and Prakash, 2004),
and of integrating river Xow modelling and transport ofsediment, with the ability to study the formation andchange of habitat in river Xoodplains and assessment ofchanges in agricultural potential, as well as studying theeVects of land use changes on physical and ecological sys-tems. We turn to these considerations in the next section.
4. Individual-based modelling in ecology and land use change
Although ecological models often involve aggregatedata such as population numbers or densities (Durrettand Levin, 1994), they have included discrete entities forsome years (Huston et al., 1988; De Angelis and Gross,1992). Here, the models are usually referred to as individ-ual-based models (again perhaps confusingly, oftenreferred to as IBM). The internal dynamics of individualsof ecological interest are clearly more complex than thediscrete-element cases treated above. Even for plants, theircomplex physiology and its interaction with the environ-ment – soil, insolation, rainfall and atmosphere – areresearch problems still far from solution. Plants also mul-tiply through a variety of reproductive processes, whereasthe characteristics of entities in a discrete-element modelare generally more Wxed (although fracture processes maybe considered; Munjiza, 2004). Seed dispersal by wind andwater, and the suitability of germination sites determinedby the past history of the landscape, are therefore impor-tant, as are interactions with animals both for setting anddispersal of seed. Interactions between plants, both withinthe same species and between diVering species furthercomplicate matters. Predation by animals on seed and ongrown plants (not to mention harvesting by humans) mayalso be important, as may the destructive and reproduc-tive eVects of Wre (which is itself coupled to the plantgrowth process and to the weather). Although this seems
Fig. 1. Comparison of vertical tracer trajectories for a 50 mm particle of density 2.65 g cm¡3 between comparable laboratory experiment and numericalsimulations (the latter having been carried out with the commercial software package PFC2D, marketed by HTItasca), as described in the text; the indica-tor particle position is measured from the base of the container.
0.00
0.05
0.10
0.15
0.20
0.25
0.30
0 100 200 300 400 500 600 700 800 900
Time (s)
Ele
vatio
n ab
ove
base
(m
)
PFC Simulation
Observed Laboratory Particle
630 M. Bithell et al. / Geoforum 39 (2008) 625–642
very diVerent from the previous examples, the system isagain one in which the evolution of the whole is generallya result of interactions between many individuals. IBMsin ecology have been reviewed recently (Grimm and Rails-back, 2005; De Angelis and Mooij, 2005) and some of therelationships between IBMs and agent-based modelling(discussed below) are reviewed in Bousquet and Le Page(2004). Although IBMs have been applied to a range of
diVerent habitats and plant and animal species, little workhas been done integrating such models with dynamicalsocial models. Instead, the eVects of people are generallyparametrized as some sort of disturbance (as in deforesta-tion simulations such as those by Deutschman et al.(1997) and Kammesheidt et al. (2001)). In the next sectionwe look at an example that brings together human andecological models using discrete methods.
Fig. 2. Numerical experiment set-up for DEM simulation. The view shows the initial and subsequent states of a 2-D simulation using disks of 2–16 mm indiameter. After shaking, the 50 mm indicator particle (white) rises to the surface. Snapshots are at 25-s intervals; particles are coloured according to initialdepth in 5 cm intervals, and the friction angle is set at 0.7.
M. Bithell et al. / Geoforum 39 (2008) 625–642 631
4.1. An example of human impact on forest cover
A promising area for this kind of research is in the studyof land-use change and its consequences, and we illustratethis here with a preliminary model that couples the hydro-logical properties of the soil with tree growth and subsis-tence farming (Bithell and Brasington, 2004). To representtrees we use a simpliWed version of the SORTIE model(Pacala et al., 1996) with just two tree species in a smallcatchment of area 400 ha (the Bore Khola in the MiddleHills of Nepal; Brasington et al., 1998), for which eleva-tion, soil, and land-use data are available. The conceptbehind this model is that growth rates of juvenile trees arecontrolled mainly by the shade from other trees. Growthrates are deWned by the rate of increase of trunk diameter,and tree height, canopy spread and canopy depth are allo-metric functions of this primary variable. Additionallytrees have a species-dependent probability of growingmore slowly or dying as a result of shading, and species-dependent seed production and seed dispersion. Thus,although trees do not move, they can spread to new areasby out-competing other species. Pacala et al. show that ingeneral over long time-scales, undisturbed forests willcome to be dominated by shade-tolerant species, even iftheir dispersal range is low, but that where there is distur-bance, the opportunity exists for wide-dispersing, lessshade-tolerant species to exploit canopy gaps in order tosurvive. However, the catchment to be simulated is not justpopulated by natural forest; much of its lower half is undercultivation, with terraced and irrigated subsistence farm-ing of rice. A considerable body of information exists onthe farming practice in this region (Shah and Schreier,1995). We are able to estimate therefore that farmsteads inthe area require approximately one hectare of land for sub-sistence (with a mean household size of 8 people), and thatin addition they use approximately 1 m3 per person of
wood for fuel and fodder per year. Since the forest model isdynamic, we can also introduce a time-dependent humanpopulation in order to examine the coupled human/forestdynamical system. Once we have the relative amount offorest and Weld cover, we can introduce a three-dimen-sional dynamic hydrological model that calculates thechanging pattern of soil moisture.
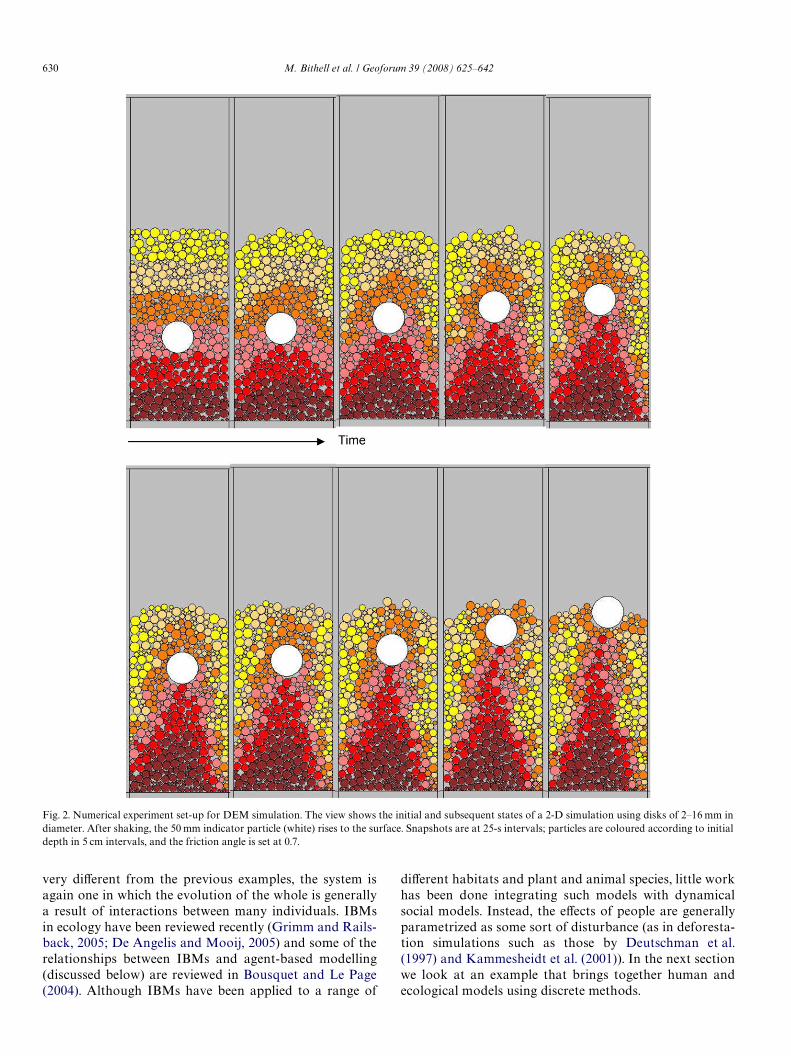
In this initial simulation, we assume just one shadeintolerant, widely dispersing species and one shade toler-ant, less dispersive species, to permit examination of anyeVects on species patterns of human-induced land-usechange. These ‘tree’ types are not intended to representparticular species, but to represent the ends of the rangeof functional types in the catchment. We iterate the forestmodel forward in time for 1200 years to allow time forany transients to die away (about 200 years, see Fig. 3),and to give a period of steady forest evolution into whichhuman settlement can be introduced. As Fig. 3 shows, ini-tially the shade intolerant trees gain in numbers owing totheir ability to rapidly colonize space, but they are gradu-ally out-competed by the shade-tolerant trees. Theseresults are essentially as for Pacala et al. (although ouroverall rates of change of tree numbers are rather morelinear than theirs; this is largely because we have simpli-Wed the shading scheme for the sake of speed. Future sim-ulations will incorporate the full shading and the eVects ofcatchment relief). Next, we assume an initial populationof 3 households introduced 600 years into the forest inte-gration (i.e. after the initial transient has died away andthe system is steadily evolving). The household popula-tion is assumed to double every 30 years (consistent withthe rate of increase of population in Nepal for the years1930–1990; Riley, 1995). New households are created ran-domly in time to match this average rate, and occupyareas close to the foot of the catchment, where the slope ofthe land is less steep, and making Welds that do not over-
Fig. 3. Time evolution of numbers of shade-tolerant trees (red) and shade intolerant trees (yellow) simulated for 1200 years (solid lines). The dotted linesshow the reduction in tree numbers after the introduction of farming communities. (For interpretation of the references to colour in this Wgure legend, thereader is referred to the web version of this article.)
632 M. Bithell et al. / Geoforum 39 (2008) 625–642
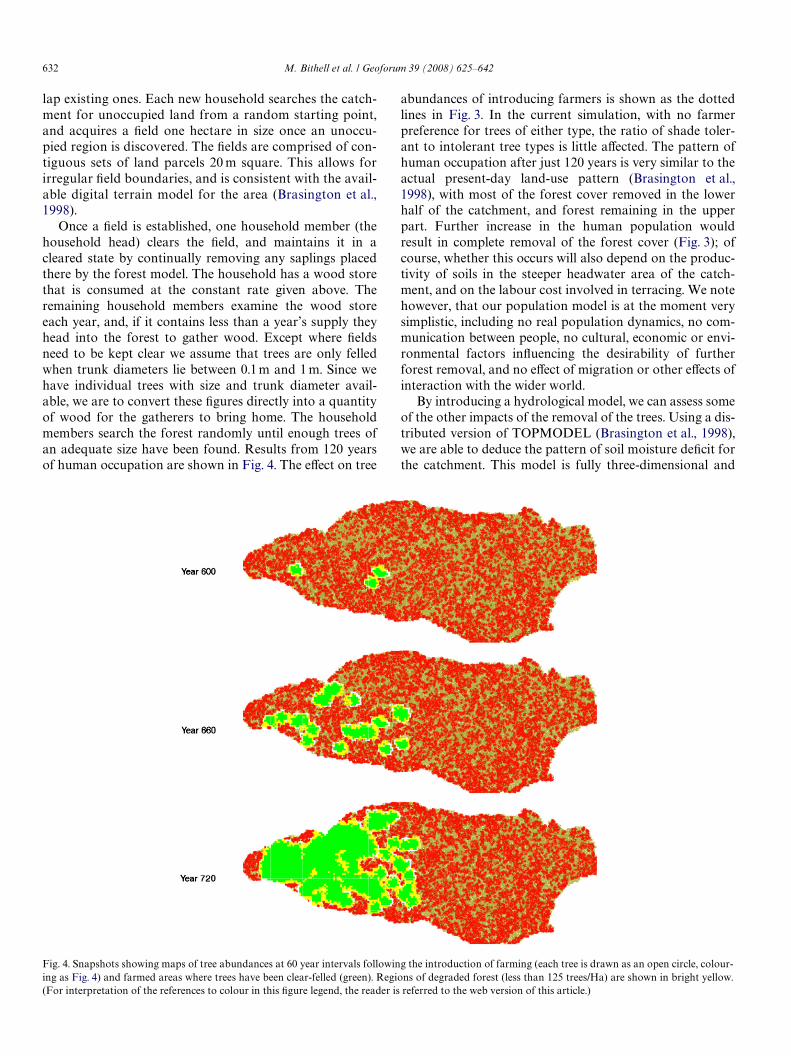
lap existing ones. Each new household searches the catch-ment for unoccupied land from a random starting point,and acquires a Weld one hectare in size once an unoccu-pied region is discovered. The Welds are comprised of con-tiguous sets of land parcels 20 m square. This allows forirregular Weld boundaries, and is consistent with the avail-able digital terrain model for the area (Brasington et al.,1998).
Once a Weld is established, one household member (thehousehold head) clears the Weld, and maintains it in acleared state by continually removing any saplings placedthere by the forest model. The household has a wood storethat is consumed at the constant rate given above. Theremaining household members examine the wood storeeach year, and, if it contains less than a year’s supply theyhead into the forest to gather wood. Except where Weldsneed to be kept clear we assume that trees are only felledwhen trunk diameters lie between 0.1 m and 1 m. Since wehave individual trees with size and trunk diameter avail-able, we are to convert these Wgures directly into a quantityof wood for the gatherers to bring home. The householdmembers search the forest randomly until enough trees ofan adequate size have been found. Results from 120 yearsof human occupation are shown in Fig. 4. The eVect on tree
abundances of introducing farmers is shown as the dottedlines in Fig. 3. In the current simulation, with no farmerpreference for trees of either type, the ratio of shade toler-ant to intolerant tree types is little aVected. The pattern ofhuman occupation after just 120 years is very similar to theactual present-day land-use pattern (Brasington et al.,1998), with most of the forest cover removed in the lowerhalf of the catchment, and forest remaining in the upperpart. Further increase in the human population wouldresult in complete removal of the forest cover (Fig. 3); ofcourse, whether this occurs will also depend on the produc-tivity of soils in the steeper headwater area of the catch-ment, and on the labour cost involved in terracing. We notehowever, that our population model is at the moment verysimplistic, including no real population dynamics, no com-munication between people, no cultural, economic or envi-ronmental factors inXuencing the desirability of furtherforest removal, and no eVect of migration or other eVects ofinteraction with the wider world.
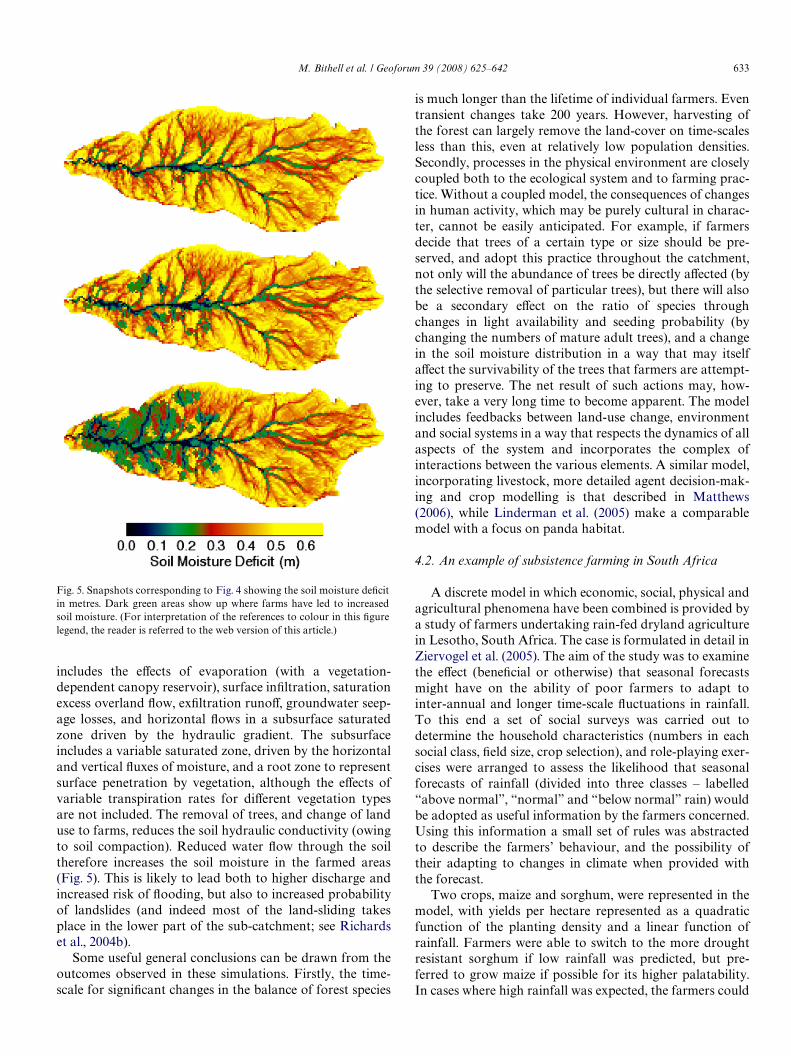
By introducing a hydrological model, we can assess someof the other impacts of the removal of the trees. Using a dis-tributed version of TOPMODEL (Brasington et al., 1998),we are able to deduce the pattern of soil moisture deWcit forthe catchment. This model is fully three-dimensional and
Fig. 4. Snapshots showing maps of tree abundances at 60 year intervals following the introduction of farming (each tree is drawn as an open circle, colour-ing as Fig. 4) and farmed areas where trees have been clear-felled (green). Regions of degraded forest (less than 125 trees/Ha) are shown in bright yellow.(For interpretation of the references to colour in this Wgure legend, the reader is referred to the web version of this article.)
M. Bithell et al. / Geoforum 39 (2008) 625–642 633
includes the eVects of evaporation (with a vegetation-dependent canopy reservoir), surface inWltration, saturationexcess overland Xow, exWltration runoV, groundwater seep-age losses, and horizontal Xows in a subsurface saturatedzone driven by the hydraulic gradient. The subsurfaceincludes a variable saturated zone, driven by the horizontaland vertical Xuxes of moisture, and a root zone to representsurface penetration by vegetation, although the eVects ofvariable transpiration rates for diVerent vegetation typesare not included. The removal of trees, and change of landuse to farms, reduces the soil hydraulic conductivity (owingto soil compaction). Reduced water Xow through the soiltherefore increases the soil moisture in the farmed areas(Fig. 5). This is likely to lead both to higher discharge andincreased risk of Xooding, but also to increased probabilityof landslides (and indeed most of the land-sliding takesplace in the lower part of the sub-catchment; see Richardset al., 2004b).
Some useful general conclusions can be drawn from theoutcomes observed in these simulations. Firstly, the time-scale for signiWcant changes in the balance of forest species
Fig. 5. Snapshots corresponding to Fig. 4 showing the soil moisture deWcitin metres. Dark green areas show up where farms have led to increasedsoil moisture. (For interpretation of the references to colour in this Wgurelegend, the reader is referred to the web version of this article.)
is much longer than the lifetime of individual farmers. Eventransient changes take 200 years. However, harvesting ofthe forest can largely remove the land-cover on time-scalesless than this, even at relatively low population densities.Secondly, processes in the physical environment are closelycoupled both to the ecological system and to farming prac-tice. Without a coupled model, the consequences of changesin human activity, which may be purely cultural in charac-ter, cannot be easily anticipated. For example, if farmersdecide that trees of a certain type or size should be pre-served, and adopt this practice throughout the catchment,not only will the abundance of trees be directly aVected (bythe selective removal of particular trees), but there will alsobe a secondary eVect on the ratio of species throughchanges in light availability and seeding probability (bychanging the numbers of mature adult trees), and a changein the soil moisture distribution in a way that may itselfaVect the survivability of the trees that farmers are attempt-ing to preserve. The net result of such actions may, how-ever, take a very long time to become apparent. The modelincludes feedbacks between land-use change, environmentand social systems in a way that respects the dynamics of allaspects of the system and incorporates the complex ofinteractions between the various elements. A similar model,incorporating livestock, more detailed agent decision-mak-ing and crop modelling is that described in Matthews(2006), while Linderman et al. (2005) make a comparablemodel with a focus on panda habitat.
4.2. An example of subsistence farming in South Africa
A discrete model in which economic, social, physical andagricultural phenomena have been combined is provided bya study of farmers undertaking rain-fed dryland agriculturein Lesotho, South Africa. The case is formulated in detail inZiervogel et al. (2005). The aim of the study was to examinethe eVect (beneWcial or otherwise) that seasonal forecastsmight have on the ability of poor farmers to adapt tointer-annual and longer time-scale Xuctuations in rainfall.To this end a set of social surveys was carried out todetermine the household characteristics (numbers in eachsocial class, Weld size, crop selection), and role-playing exer-cises were arranged to assess the likelihood that seasonalforecasts of rainfall (divided into three classes – labelled“above normal”, “normal” and “below normal” rain) wouldbe adopted as useful information by the farmers concerned.Using this information a small set of rules was abstractedto describe the farmers’ behaviour, and the possibility oftheir adapting to changes in climate when provided withthe forecast.
Two crops, maize and sorghum, were represented in themodel, with yields per hectare represented as a quadraticfunction of the planting density and a linear function ofrainfall. Farmers were able to switch to the more droughtresistant sorghum if low rainfall was predicted, but pre-ferred to grow maize if possible for its higher palatability.In cases where high rainfall was expected, the farmers could
634 M. Bithell et al. / Geoforum 39 (2008) 625–642
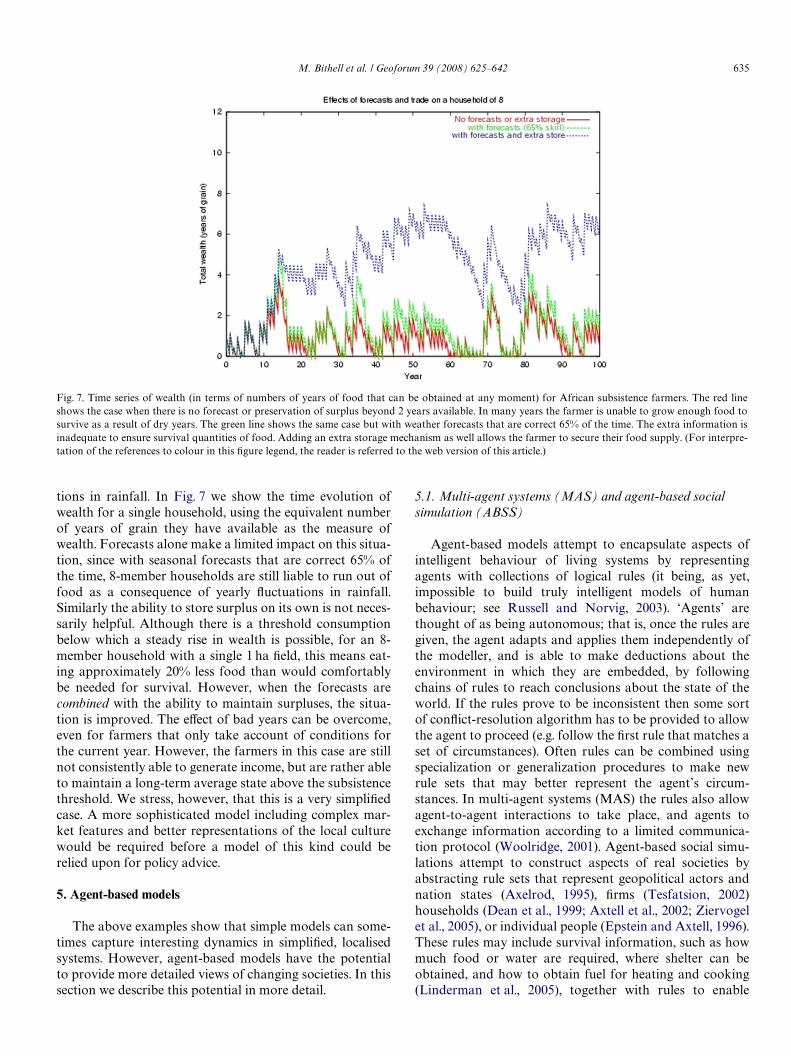
increase their planting density, but with the risk that yieldscould in this case be severely reduced if in fact the rainfallturned out to be low. Poor households were represented ashaving 8 mouths to feed from 1 hectare of land, with cropyields for normal rainfall able to provide just over 100 kg ofgrain per head per year, just enough to survive. These num-bers are similar to those used for the Nepal case above.Harvested crops could be stored for two years. Because ofXuctuations in rainfall from year to year and limitations onstorage, a household that on average should have been ableto bring in enough food to survive, in practice suVeredmany years of being unable to grow enough food to supplytheir needs (see Fig. 7).
January-to-March rainfall averages were derived from a39-year time series. Forecasts, such as would be issued by arepresentative of a Meteorological OYce, were modelled byassuming diVerent levels of probability that a forecastwould be in agreement with the rainfall. The results sug-gested that provided there was a more than 65% chancethat the forecast class (out of “above normal”, “normal”, or“below normal” rainfall as mentioned above; each classrepresents one tercile of the rainfall distribution) was inagreement with the actual rainfall experienced, then theforecast could marginally beneWt those farmers who usedthe forecast to change their planting. If the forecast was lessaccurate than this, particularly if many wet years were fore-cast that turned out to be dry, then forecasting could actu-ally have damaging eVects. A model component wasincluded to allow the farmers to respond to this informa-tion, by including a trust level each farmer assigns to theforecast. According to the role-playing game, about three
years experience with the forecast would be required toconvince farmers to begin using it, but they would tend toignore poor forecasts (on the grounds that they dislikedhearing bad news). This was represented as a linear scale oftrust, with increases occurring in years with good forecasts,and decreases only in bad years when these actually had animpact on the farm yield. The results suggested that evenwhen the forecast was of relatively poor quality, because ofthe Xuctuations from year to year (even poor forecasts areoccasionally correct by chance) the time before inaccurateforecasts are eventually rejected could be as long as 20years.
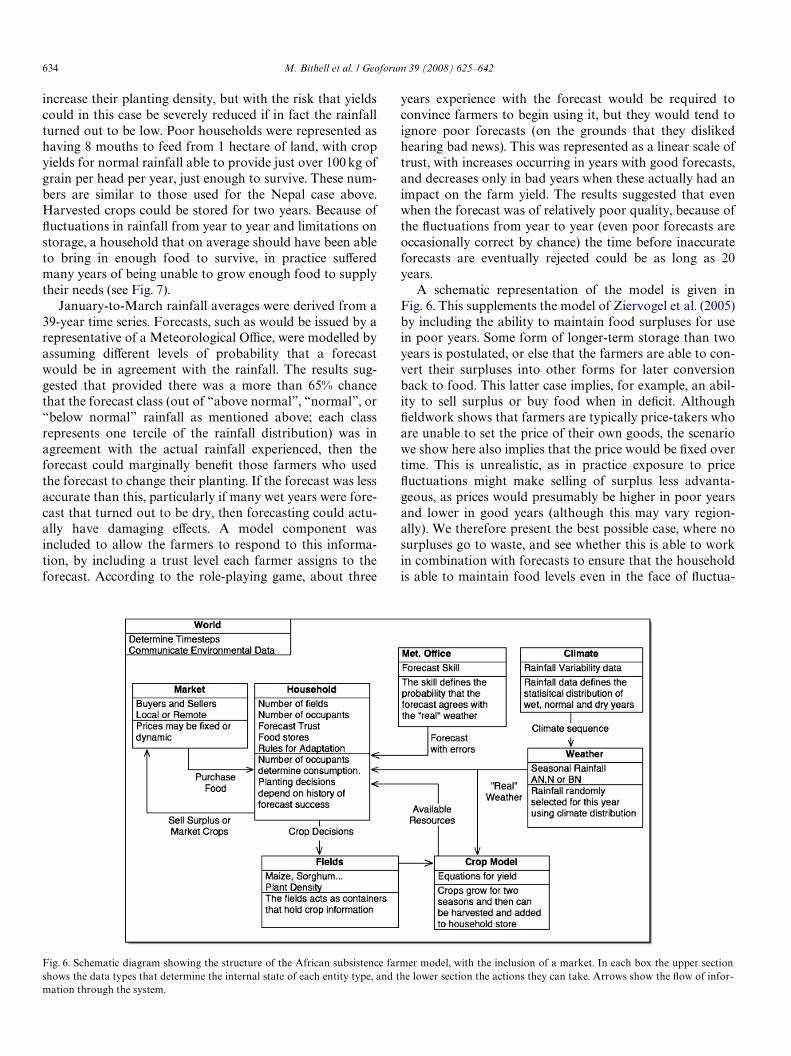
A schematic representation of the model is given inFig. 6. This supplements the model of Ziervogel et al. (2005)by including the ability to maintain food surpluses for usein poor years. Some form of longer-term storage than twoyears is postulated, or else that the farmers are able to con-vert their surpluses into other forms for later conversionback to food. This latter case implies, for example, an abil-ity to sell surplus or buy food when in deWcit. AlthoughWeldwork shows that farmers are typically price-takers whoare unable to set the price of their own goods, the scenariowe show here also implies that the price would be Wxed overtime. This is unrealistic, as in practice exposure to priceXuctuations might make selling of surplus less advanta-geous, as prices would presumably be higher in poor yearsand lower in good years (although this may vary region-ally). We therefore present the best possible case, where nosurpluses go to waste, and see whether this is able to workin combination with forecasts to ensure that the householdis able to maintain food levels even in the face of Xuctua-
Fig. 6. Schematic diagram showing the structure of the African subsistence farmer model, with the inclusion of a market. In each box the upper sectionshows the data types that determine the internal state of each entity type, and the lower section the actions they can take. Arrows show the Xow of infor-mation through the system.
M. Bithell et al. / Geoforum 39 (2008) 625–642 635
tions in rainfall. In Fig. 7 we show the time evolution ofwealth for a single household, using the equivalent numberof years of grain they have available as the measure ofwealth. Forecasts alone make a limited impact on this situa-tion, since with seasonal forecasts that are correct 65% ofthe time, 8-member households are still liable to run out offood as a consequence of yearly Xuctuations in rainfall.Similarly the ability to store surplus on its own is not neces-sarily helpful. Although there is a threshold consumptionbelow which a steady rise in wealth is possible, for an 8-member household with a single 1 ha Weld, this means eat-ing approximately 20% less food than would comfortablybe needed for survival. However, when the forecasts arecombined with the ability to maintain surpluses, the situa-tion is improved. The eVect of bad years can be overcome,even for farmers that only take account of conditions forthe current year. However, the farmers in this case are stillnot consistently able to generate income, but are rather ableto maintain a long-term average state above the subsistencethreshold. We stress, however, that this is a very simpliWedcase. A more sophisticated model including complex mar-ket features and better representations of the local culturewould be required before a model of this kind could berelied upon for policy advice.
5. Agent-based models
The above examples show that simple models can some-times capture interesting dynamics in simpliWed, localisedsystems. However, agent-based models have the potentialto provide more detailed views of changing societies. In thissection we describe this potential in more detail.
5.1. Multi-agent systems (MAS) and agent-based social simulation (ABSS)
Agent-based models attempt to encapsulate aspects ofintelligent behaviour of living systems by representingagents with collections of logical rules (it being, as yet,impossible to build truly intelligent models of humanbehaviour; see Russell and Norvig, 2003). ‘Agents’ arethought of as being autonomous; that is, once the rules aregiven, the agent adapts and applies them independently ofthe modeller, and is able to make deductions about theenvironment in which they are embedded, by followingchains of rules to reach conclusions about the state of theworld. If the rules prove to be inconsistent then some sortof conXict-resolution algorithm has to be provided to allowthe agent to proceed (e.g. follow the Wrst rule that matches aset of circumstances). Often rules can be combined usingspecialization or generalization procedures to make newrule sets that may better represent the agent’s circum-stances. In multi-agent systems (MAS) the rules also allowagent-to-agent interactions to take place, and agents toexchange information according to a limited communica-tion protocol (Woolridge, 2001). Agent-based social simu-lations attempt to construct aspects of real societies byabstracting rule sets that represent geopolitical actors andnation states (Axelrod, 1995), Wrms (Tesfatsion, 2002)households (Dean et al., 1999; Axtell et al., 2002; Ziervogelet al., 2005), or individual people (Epstein and Axtell, 1996).These rules may include survival information, such as howmuch food or water are required, where shelter can beobtained, and how to obtain fuel for heating and cooking(Linderman et al., 2005), together with rules to enable
Fig. 7. Time series of wealth (in terms of numbers of years of food that can be obtained at any moment) for African subsistence farmers. The red lineshows the case when there is no forecast or preservation of surplus beyond 2 years available. In many years the farmer is unable to grow enough food tosurvive as a result of dry years. The green line shows the same case but with weather forecasts that are correct 65% of the time. The extra information isinadequate to ensure survival quantities of food. Adding an extra storage mechanism as well allows the farmer to secure their food supply. (For interpre-tation of the references to colour in this Wgure legend, the reader is referred to the web version of this article.)
636 M. Bithell et al. / Geoforum 39 (2008) 625–642
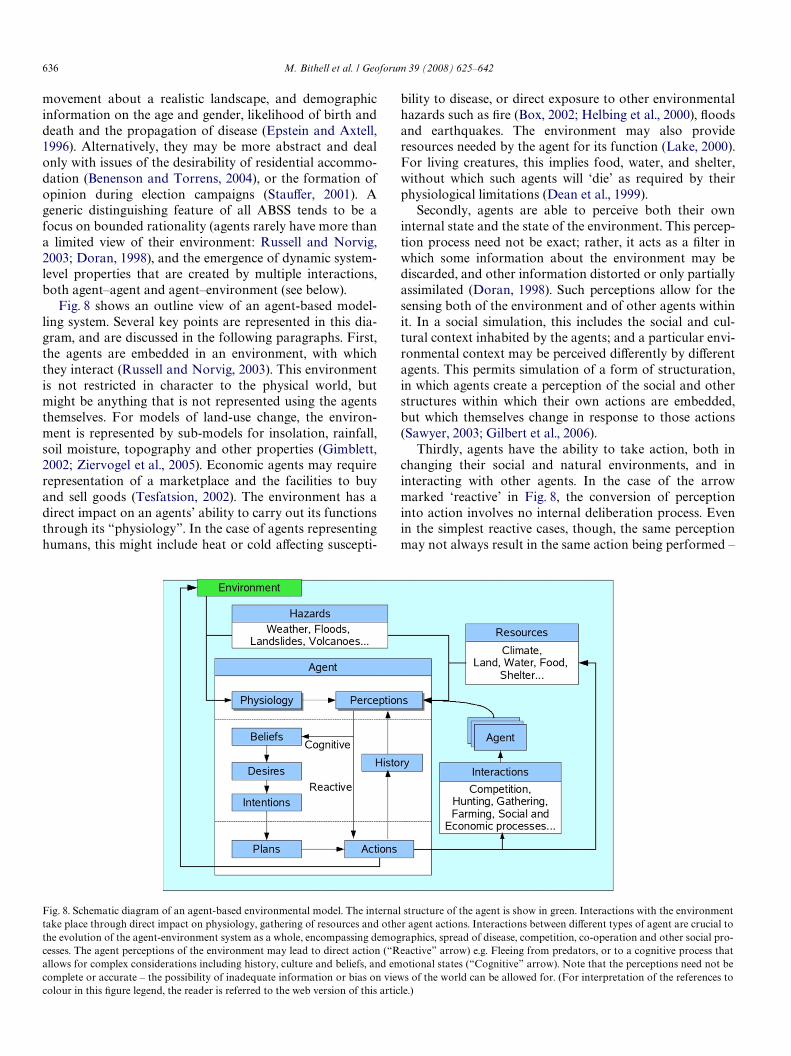
movement about a realistic landscape, and demographicinformation on the age and gender, likelihood of birth anddeath and the propagation of disease (Epstein and Axtell,1996). Alternatively, they may be more abstract and dealonly with issues of the desirability of residential accommo-dation (Benenson and Torrens, 2004), or the formation ofopinion during election campaigns (StauVer, 2001). Ageneric distinguishing feature of all ABSS tends to be afocus on bounded rationality (agents rarely have more thana limited view of their environment: Russell and Norvig,2003; Doran, 1998), and the emergence of dynamic system-level properties that are created by multiple interactions,both agent–agent and agent–environment (see below).
Fig. 8 shows an outline view of an agent-based model-ling system. Several key points are represented in this dia-gram, and are discussed in the following paragraphs. First,the agents are embedded in an environment, with whichthey interact (Russell and Norvig, 2003). This environmentis not restricted in character to the physical world, butmight be anything that is not represented using the agentsthemselves. For models of land-use change, the environ-ment is represented by sub-models for insolation, rainfall,soil moisture, topography and other properties (Gimblett,2002; Ziervogel et al., 2005). Economic agents may requirerepresentation of a marketplace and the facilities to buyand sell goods (Tesfatsion, 2002). The environment has adirect impact on an agents’ ability to carry out its functionsthrough its “physiology”. In the case of agents representinghumans, this might include heat or cold aVecting suscepti-
bility to disease, or direct exposure to other environmentalhazards such as Wre (Box, 2002; Helbing et al., 2000), Xoodsand earthquakes. The environment may also provideresources needed by the agent for its function (Lake, 2000).For living creatures, this implies food, water, and shelter,without which such agents will ‘die’ as required by theirphysiological limitations (Dean et al., 1999).
Secondly, agents are able to perceive both their owninternal state and the state of the environment. This percep-tion process need not be exact; rather, it acts as a Wlter inwhich some information about the environment may bediscarded, and other information distorted or only partiallyassimilated (Doran, 1998). Such perceptions allow for thesensing both of the environment and of other agents withinit. In a social simulation, this includes the social and cul-tural context inhabited by the agents; and a particular envi-ronmental context may be perceived diVerently by diVerentagents. This permits simulation of a form of structuration,in which agents create a perception of the social and otherstructures within which their own actions are embedded,but which themselves change in response to those actions(Sawyer, 2003; Gilbert et al., 2006).
Thirdly, agents have the ability to take action, both inchanging their social and natural environments, and ininteracting with other agents. In the case of the arrowmarked ‘reactive’ in Fig. 8, the conversion of perceptioninto action involves no internal deliberation process. Evenin the simplest reactive cases, though, the same perceptionmay not always result in the same action being performed –
Fig. 8. Schematic diagram of an agent-based environmental model. The internal structure of the agent is show in green. Interactions with the environmenttake place through direct impact on physiology, gathering of resources and other agent actions. Interactions between diVerent types of agent are crucial tothe evolution of the agent-environment system as a whole, encompassing demographics, spread of disease, competition, co-operation and other social pro-cesses. The agent perceptions of the environment may lead to direct action (“Reactive” arrow) e.g. Fleeing from predators, or to a cognitive process thatallows for complex considerations including history, culture and beliefs, and emotional states (“Cognitive” arrow). Note that the perceptions need not becomplete or accurate – the possibility of inadequate information or bias on views of the world can be allowed for. (For interpretation of the references tocolour in this Wgure legend, the reader is referred to the web version of this article.)

M. Bithell et al. / Geoforum 39 (2008) 625–642 637
diVerences may arise owing to changes in the internal stateof the agent. Such cases are rather similar to the simple dis-crete-element models referred to above, although the rangeof possible actions is much broader than the simple Newto-nian physics of discrete-element models.
Fourthly, agents can retain knowledge of a history ofpast events, with the ability to learn over time (e.g. Gilbertet al., 2006), and the potential to make plans for the future(Matthews, 2006). In the case of reactive agents, the historymay be implicit, in that the reaction to the current environ-ment is changed by past events. More sophisticated ‘cogni-tive’ agents may have more complex behaviour. Fig. 8illustrates one such case – so-called ‘BDI’ agents (Wool-ridge, 2001), which have beliefs, desires and intentions, thatare used to formulate plans for future behaviour basedboth on the current state of the ‘environment’ and its pasthistory, and on the perceived states and history of otheragents. This formulation allows for the beliefs to be in error(Doran, 1998) and in general will be based on limited infor-mation, both because the interaction of an agent with itsenvironment and other agents is limited, and because otheragents can have private information that they do not neces-sarily communicate to others during interactions. Thebeliefs may also have Wxed cultural content, so that thereactions to events are biased by assumptions about theworld. Desires similarly need not be consistent with eachother and there may be conXict between them in an agent’sdecision to take action. Between them the beliefs anddesires lead to formulation of an intention to take action.That is, the agent is capable of setting and attempting tocarry out purposeful goal-driven behaviour. In practice,because the problem of formulating plans is computation-ally diYcult, the agents will normally be provided with alibrary of plans that allow given behaviours to be carriedout, and will choose between them on the basis of the goalsto be achieved. However, the range of behaviours that canbe expressed is not limited, and negative aspects such ascrime, corruption, deceit and violence (Makowsky, 2006;Younger, 2005) can be incorporated into a model, as well aspositive characteristics such as co-operation, self sacriWceor altruism (Back and Flache, 2006; Edmonds, 2006; Pep-per and Smuts, 2000).
Fifthly, agents interact with each other, possibly in non-linear ways. Although the response to a given perceptionmay be known beforehand, the interactions between agentsmean that the overall behaviour of a multi-agent systemwill not in general be knowable without running simula-tions. This interaction can include observation, communi-cation, physical interaction (e.g. crowding to exits in escapemodels Helbing et al., 2000), spread of disease (Eubanket al., 2004), imitation of perceived successful behaviour,and co-operation to achieve common goals, competitionfor resources (Doran and Palmer, 1995), hunting, gathering,or agricultural practices (Hare and Deadman, 2004). In thecase of reactive agents (sometimes called ‘weak agents’)most of the emergent larger-scale structure of the system isentirely driven by this interaction, in a similar manner to
the discrete-element case. For cognitive (or ‘strong agents’)interaction may still be important, but the agents’ internalcognitive structure is also signiWcant (Benenson and Tor-rens, 2004). Again, agents can retain a history of interac-tions with other identiWable individuals, so that, forexample, if they make a trade with another agent that laterproves to have been unfavourable, they will be less likely totrade with that individual in the future. Furthermore, therepresentation of realistic networks of social contact is pos-sible, and the eVects of this on, for example, formation ofopinions, can be investigated (StauVer et al., 2004).
Finally, agents in a multi-agent system will generally beheterogeneous. This arises not only because they havediVerent properties, such as age, gender, cultural values andso on, but also because their experienced history of theenvironment and other agents diVers (Edmonds, 1999).Thus, even in a system where the agents begin with thesame properties, diVerences arise over time. On the otherhand, there is the possibility of convergence of behaviourand the formation of collective belief through the exchangeof information between agents (Doran, 1998). In eithercase, the behaviour will in general be very diVerent from theaggregate average behaviour that would be expected from aset of identical entities in an identical environment.
5.2. Formulation of the rules
A key problem in agent-based modelling is to identify aset of usable rules to govern agent behaviour, and appropri-ate to the context in which the model is set. Severalapproaches have been made to this, with varying degrees ofrealism. Some of the methods employed to construct rulesets are therefore considered in this section, particularly toillustrate the diversity of methodological context demandedby discrete-, individual- or agent-based simulation models.
Perhaps the earliest examples of agent-type social simu-lations are the segregation models of Sakoda (1971) andSchelling (1971), which employed rather ad hoc rules. Theseauthors demonstrated that a simple migration rule imple-mented for two types of individual can lead to near-com-plete separation into spatially-segregated groups, even ifthe two types have only a relatively mild preference forentities of their own group. More recently Epstein andAxtell (1996) have used the ad hoc approach to attempt acomprehensive exploration of resource gathering, demo-graphics, economics and trade, cultural transmission, dis-ease, environmental degradation and warfare, albeit in asimpliWed context. In the last few years, opinion formationmodels have also adopted arbitrary rules in order to testout their eVect on convergence (or otherwise) of opinion toa single state (Sznajd-Weron and Sznajd, 2000; StauVer,2001; Hegselmann and Krause, 2002; DeVuant et al., 2002;StauVer et al., 2004). These kinds of rule are useful for test-ing ‘what if’ scenarios: how would a society evolve if itsrules Wtted a certain pattern? Of course, rule selection froma (theoretically inWnite) set of possibilities cannot guaranteethat the rules people might actually use are those speciWed

638 M. Bithell et al. / Geoforum 39 (2008) 625–642
by the model, even when the global model state looks plau-sible when compared with the data.
For societies of the past a fruitful approach is to use thearchaeological record to try to re-construct demographicand farm distribution patterns. The classic example here isthe simulation of Anasazi population dynamics in LongHouse Valley by Axtell et al. (2002) (see also Dean et al.,1999). This reproduced a number of characteristics of thesettlement pattern and population history for the studyarea, showing that the tendency of settlements to be dis-persed or aggregated was dependent on climate, and cap-turing the geographical distribution of settlement as theclimate changed. The population distribution over time iswell reproduced, although for population numbers to becorrect there must be variations between households – ahomogeneous population leads to numbers that are far toolarge. The model also shows that the valley could have sup-ported a population of farmers at a low level even after thevalley was in practice abandoned. The authors consider thisto be evidence that the Wnal abandonment was likely tohave been a result of cultural factors not represented by thesimulation. Other work on archaeological systems includesthe EOS project (Doran and Palmer, 1995) and MAGICAL(Lake, 2000). Further developments in the modelling ofancient populations are underway for Mesopotamia usingmore detailed rules to cover the range of activities and tech-nologies available to the ancient peoples of the region(Christiansen and Altaweel, 2004).
For recent and present populations, and where reliablecensuses or other demographic databases are available,information can be extracted on population and migration,living conditions and housing, wealth and disease. Suchsources span the time from the beginning of reliable record-keeping to the present, where in the latter case it can becombined with social survey methods. Examples of thisapproach, along with other details of application of theagent-based methodology in an urban context, can befound in Benenson and Torrens (2004). A detailed micro-simulation methodology derived from census data is usedto generate populations for agent-based traYc modelling inthe TRANSIMS model (Nagel et al., 1997). Detailed traYcmodels constitute some of the largest agent-based simula-tion studies to date, able to cope with tens of millions ofindividuals distributed over large urban regions (Cetinet al., 2002).
To deWne the rule sets for contemporary populationswhere direct access to the population under study is possi-ble, the usual range of social survey, questionnaire and role-playing and other participatory research techniquesbecomes available (Ramanath and Gilbert, 2004; An et al.,2001; Dray et al., 2006). This approach was adopted for theAfrican farmer model described above (Ziervogel et al.,2005). The advantage here is that, although it may be hardto be sure that the information extracted for the modelreally represents the net eVect of people’s thought pro-cesses, the modelling procedure can be solidly grounded inobservation, and the results of the model may be challenged
against people’s perceptions of how they in fact governtheir lives. The Xexibility also exists to allow the populationunder study to deWne for themselves the rule set. Applica-tion of such methods will necessarily be somewhat limitedin extent, however, as reliable evidence of this kind is verytime consuming to gather, so that usually only localisedand simple systems can be studied.
Finally, information on the way people make decisionscan be gleaned from the literature of behavioural psychol-ogy, sociology and anthropology. Early examples includethe work of Milgram (1967) and Granovetter (1973) on theway in which social groups are inter-connected, while morerecent research has used this literature to study decision-making during elections (Kottonau and Pahl Wöstl, 2004).Again, this kind of information is probably most appropri-ate to the social context in which the information has beengathered, and is therefore of most value for current orrecent populations, although this does not exclude the‘what if’ type of experimentation, in applying rules to popu-lations other than those from whom the original data havebeen derived.
A general conclusion that emerges from this brief sum-mary of the diversity of resource required in order to dis-cover appropriate rule sets for agents in a particular study,is that agent-based modelling can be a means to co-ordi-nate a range of qualitative and quantitative approaches.Additionally, enlightened applications can adopt a partici-patory approach to research in which subjects inXuence therepresentation of rules, critically evaluate model outcomes,and contribute to re-evaluation of rule bases (Moss andEdmonds, 2005). This implies not only that there is a chal-lenging opportunity to connect the study of social and envi-ronmental phenomena, but also to combine micro-scalebehavioural research and macro-scale analysis of popula-tions, demographics and economics.
6. Discussion
We have argued in this paper that discrete computa-tional methods are able to deal with the emergence of large-scale structure from the interaction of many heterogeneoussmaller components. Where agent-based models are con-cerned, this point about emergence deserves some furtherdiscussion. The issue of emergence itself is one that hasbeen treated at length elsewhere (see O’Sullivan (2004) for areview in a geographical context), and with reference tosocial modelling in Gilbert (1995), O’Sullivan and Haklay(2000) and Sawyer (2003). O’Sullivan and Haklay in partic-ular question whether agent models are capable of buildingsocial structure from what appears to be a manifestly indi-vidualist approach. They also emphasise that agents thatrepresent individuals should be rooted in a historical con-text, which deWnes the society in which they live, and consti-tutes the framework for their own immediate set of rules.They also claim (with others) that social structure exists ata broader level than individual agent (it is “out there”,beyond the agents’ own set of rules), although they do not

M. Bithell et al. / Geoforum 39 (2008) 625–642 639
elucidate the mechanism by which such broader scale socialstructure is maintained outside of agents’ individual knowl-edge and memory (see also Gilbert, 1995). However, thisargument appears to conXate several diVerent issues, andalso to assume that agents only represent individual peoplerather than larger entities. In fact, socially constructed insti-tutions may also be agents within an agent-based modellingframework.
One evident form in which social structure really is “outthere”, is in the sense of the whole complex of objectsincluding buildings, roads, power and water distributionnetworks, waste-disposal structures (that is, infrastructure),as well as the found or constructed artefacts (includingclothing, tools, food etc.), and the assemblage of writtenmaterial, images maps and diagrams, including the labellingof artefacts and the environment, literature, written histori-cal records and institutional documentation. This whole setof objects constitutes the agent’s physical environment justas much as the ecological, geological and atmosphere/oceansystems, and the objects themselves, as well as the relationsbetween them, and references they make to each other,really do make up a part of the social system that existsindependently of the individuals that interact with them(and encodes the history of the society in a variety of ways).However, the meaning of these objects and the uses towhich they are put still requires that the agents have anindividual perception of the objects, that is, the value of anyobject still lies in “what agents merely think it is” to useO’Sullivan and Haklay (2000) phrase. However, this aspectof social systems is rarely included in agent models exceptin a limited sense, where explicitly required, as for example,in traYc modelling (Nagel et al., 1997) or in studies of rec-reational use of the environment (Gimblett, 2002). Thisinfrastructural context contrasts with another sense inwhich social structures are apparently “out there”; the waythat new members of a society are constrained by the com-munication and value systems that they are exposed to bypre-existing members of the society. This kind of phenome-non is simulated in models of shared lexicon generation(Hutchins and Hazlehurst, 1995; Sawyer, 2003) whereagents learn to name objects in an environment. Whereasagents that exist early in such as system are able to generatenew names, those that arrive later on are constrained by thechoices made by previous occupants. However, these con-straints are implicitly coded into the agents’ rule sets, andare therefore made operational by tacit agreementsbetween individuals using their own personal cognitivestructures i.e the social structure is a concept embeddedwithin in each agent, generated by communication, andwith no independent existence of its own.
As noted above, agents need not represent “individuals”solely in the sense of individual people. An agent can repre-sent any identiWable goal-directed autonomous actor, andthis includes households, Wrms, governments or anythingfor which a set of behavioural rules can be deWned. Indeed,O’Sullivan and Haklay (2000) imply that agent-based mod-els should explicitly include institutional structures. There
is certainly no necessity in the use of multi-agent modellingeither for the agents to be homogeneous in type or in rule-set (indeed one strength of the technique is that heterogene-ity is allowed), or that a “reductionist” strategy be used inwhich agents can only be individual people. Recent work byBosse and Treur (2006) has directly addressed the problemof re-interpreting small-scale groups of agents as a largercollective “single agent”. This holds out the prospect thatsuch larger “single agents” may be able to interact withindividuals at the smaller scale, allowing construction ofinstitutions directly within an agent model.
Such collective structures in society are not themselveshomogeneous in character or function. Formal institutions,such as the educational or legal system, may have a verydiVerent character and structure from business trading net-works, families, or groups of acquaintances, and may diVeragain from large scale but rather ill-deWned phenomenasuch as “the climate of opinion” that may nevertheless havean eVect on collective behaviour, for example in the resultsof elections (StauVer, 2001). Other patterns of behaviourmay simply arise as individual but un-coordinatedresponses of agents to other agents and the environment,but never acquire a formal “institutional” character. Theymay not be perceived by members of the society as “socialphenomena”, but may nevertheless have global eVects aris-ing from coupled modes of behaviour (as in the El Farolbar problem; Arthur, 1994 c.f. the mention of shared lexi-con generation above). It is an open question what aspectsof all these diVerent collective structures agent models maybe able to represent, or to construct for themselves. Familystructures have certainly been simulated (Small, 2000;White, 1999), including the eVect of marriage on tribal hier-archies and politics, and it is a relatively straightforwardmatter for each agent to keep track of its own kin relation-ships (although the question of initialising a model with anappropriate historical structure of these relations could beimportant). Similarly, hierarchies of individuals and powerrelationships have been modelled (Doran and Palmer,1995), while attempts to simulate collective behaviour havelong been a concern in agent modelling (Findler and Maly-ankar, 1995). TraYc models (Cetin et al., 2002) allow forthe generation of large-scale collective structures as a resultof demands for transportation which then modify the plan-ning of the agents as they perceive the existence of develop-ing congestion. This constitutes a direct “macro–micro”link between the desires of individual agents and their col-lective eVect on the whole system. However, such multi-agent relationships have generally been added to models asexogenous structures, by the modeller.
This prior determination of structure may be appropri-ate for testing a given social theory, and elaborating theconsequences of assumptions about the way societies func-tion (for example, to test ideas about structuration theoryand the necessity for individual social knowledge; Sawyer,2003). Such tests would not necessarily allow evaluation ofwhether theory is correct, but would allow mapping thespace of possibilities, by showing whether a particular

640 M. Bithell et al. / Geoforum 39 (2008) 625–642
assumption about social structure was either necessary orsuYcient for the functioning of a model society, and byshowing what observable consequences of assumptionsabout social systems might be. Thus, testing against obser-vations from real societies might allow social theories to bereWned (Moss and Edmonds, 2005). However, for modelledsocieties really to emerge “from the bottom up”, in Epsteinand Axtell (1996) phrase, there needs to be more Xexibility,as suggested by Gilbert et al. (2006). They consider a sharedlexicon intended for use in evolving a model society wherecollective action to deal with environmental problemsarises within the model, rather than being imposed fromoutside, thereby directly coupling self-construction of asociety to its eVects on the agents’ physical surroundings. Itis hard to know whether such an approach would lead tomodelled social structures that would map recognisablyonto any known society, but at least the learning process ofconstructing such a model should illuminate how such col-lective structures might be created. Simulation of socialstructure may, then, be a case of equipping model agentswith the right set of tools to allow perception of, and inter-action with, dynamic structures both social and environ-mental (including the landscape; Itami, 2002), at scaleslarger than individual agents.
An important issue, little discussed in the context ofagent models, but of particular interest when consideringtheir use for policy advice or as environmental manage-ment tools, is their reXexive nature. Models of society arethemselves embedded in the system they are attempting torepresent. This has a number of implications, not leastabout who should own and run the models, and how theresults should be distributed and interpreted. In an open,democratic society, any model used for policy decision-making should be accessible by all those who could beaVected by policy outcomes. This is problematic, however,in that such models are complex, require signiWcant com-puting resources, and include assumptions that, even whendocumented fully, may be diYcult to grasp in their entirety(as much true for model developers themselves as for users).Even so, where models attempt to predict possible futures(rather then being used as tools for analysis of current sys-tems, or to test concepts), they potentially aVect the scopeof their own predictions by altering the system in whichthey are embedded. Merely the knowledge that the modelexists, and the potential that it might make predictions,could be enough to alter the social situation being mod-elled. However, the reXexive nature of social models maynevertheless allow deWnite results to be derived. Some out-comes may be robust to changes in the perception of aproblem that could arise once the model results are known.Other results could converge to a stable answer if the modelis given a representation of the eVects of its own results, inmuch the way that a recursive subroutine may give a well-deWned result in a more general computation. In any case,reXexivity is a potential source of uncertainty diVerent incharacter from other properties of non-linear systems, suchas sensitivity to initial conditions, or the more general
uncertainty introduced by inaccuracies in model formula-tion or input data. The latter uncertainties lead to modelresults being probabilistic in character rather than deter-ministic, and such probabilistic results are likely to be thenature of outcomes for practical models of society. How-ever, the reXexive nature of social models may ultimatelylimit the kinds of questions that can be meaningfully askedof any social simulation system.
7. Conclusions
In this paper we have tried to review and illustrate awide range of systems, ranging from the relatively simple tothe complex, that can be modelled used a discrete approach.Clearly the same techniques are not globally applicable toall, but the conceptual and computational overlap is suY-cient to allow an underlying framework that can be used tobuild cross-disciplinary integrated modelling tools. Theoutline of Fig. 8 gives a basis for this, in which we can usediscrete methods to model each of the individual (agent)elements of the social and ecological system, while model-ling the appropriate parts of the environmental back-ground (hazards, Xuid Xows) using computationally alliedtechniques. As such we can make test-beds for other theo-retical ideas (such as global general equilibrium from eco-nomic theory; Epstein and Axtell, 1996), but we can alsohope to provide a methodology to model systems thatwould be beyond reach in other modes of analysis. We mayview it as complementary to more qualitative approaches,providing the means to work through the consequences ofsociological theories and observations in the absence of thecapacity to test them out on real societies (Sawyer, 2003).The complex intertwined networks of physical, ecologicaland social systems that govern human attachment to, andexploitation of, particular places (including, perhaps, theEarth itself) may seem an intractable problem to study, butthese methods have the potential to throw some light on theobscurity; and, indeed, to permit geographers to renewtheir exploration of space–time geographies.
Acknowledgements
The referees on the paper are thanked for helpful com-ments on the text and suggestions for improvements.
References
An, L., Liu, J., Ouyang, Z., Linderman, M., Zhou, S., Zhang, H., 2001. Sim-ulating demographic and socioeconomic processes on household leveland implications for giant panda habitats. Ecol. Model. 140, 31–49.
Arthur, B., 1994. Inductive reasoning and bounded rationality. AmericanEconomic Association Papers 84, 406-411. (Also at http://www.san-tafe.edu/arthur/Papers/El_Farol.html.).
Axelrod, R., 1995. A model of the emergence of new political actors. In:Gilbert, N., Conte, R. (Eds.), ArtiWcial Societies: The Computer Simu-lation of Social Life. UCL Press, London, pp. 9–40.
Axtell, R.L., Epstein, J.M., Dean, J.S., Gumerman, G.J., Swedlund, A.C., Har-burger, J., Chakravarty, S., Hammond, R., Parker, J., Parker, M., 2002.

M. Bithell et al. / Geoforum 39 (2008) 625–642 641
Population growth and collapse in a multi-agent model of the KayentaAnasazi in Long House Valley. Proc. Nat. Acad Sci. USA 99, 7275–7279.
Back, I., Flache, A., 2006. The viability of cooperation based on interper-sonal commitment. J. Artif. Soc. Social Simul. 9 (1). http://jasss.soc.sur-rey.ac.uk/9/1/12.html.
Batchelor, G.K., 1967. An Introduction to Fluid Dynamics. CUP, Cam-bridge.
Batty, M., 2005. Cities and Complexity. MIT Press, Cambridge, MA.Benenson, I., Torrens, P.J., 2004. Geosimulation: Automata-based Model-
ing of Urban Phenomena. John Wiley & Sons Ltd, Chichester.Bithell, M., Brasington, J., 2004. Integrating agent models of subsistence
farming with dynamic models of water distribution. EOS Trans. AGU85 (47), SF33A-0725.
Bithell, M., Vaughan, G., Gray, L.J., 2000. Persistence of stratosphericozone layers in the troposphere. Atmosph. Environ. 34, 3563–3570.
Bosse, T., Treur, J., 2006. Formal interpretation of a multi-agent society asa single agent. J. Artif. Soc. Social Simul. 9 (2). <http://jasss.soc.sur-rey.ac.uk/9/2/6.html>.
Bousquet, F., Le Page, C., 2004. Multi-agent systems and eco-system man-agement: a review. Ecol. Modell. 176, 313–332.
Box, P., 2002. Spatial units as agents: making the landscape an equalplayer in agent-based simulations. In: Gimblett, H.R. (Ed.), IntegratingGeographic Information Systems and Agent-based Modeling Tech-niques for Simulating Social and Ecological Processes. In: Sante FeInstitute Studies in the Sciences of complexity OUP, Oxford.
Brasington, J., El-Hames, A., Richards, K., 1998. Hydrological modellingin humid tropical catchments. In: Harper, D., Brown, A. (Eds.), TheSustainable Management of Tropical Catchments. John Wiley & SonsLtd., Chichester, pp. 13–336.
Carlstein, T., Parkes, D., Thrift, N., 1978. Timing Space and Spacing Time(3 Volumes). Edward Arnold, London.
Cetin, N., Nagel, K., Raney, B., Voellmy, A., 2002. Large-scale multi-agenttransportation simulations. Comput. Phys. Commun. 147, 559–564.
Chave, J., 1999. Study of structural, successional and spatial patterns intropical rain forests using TROLL, a spatially explicit forest model.Ecol. Model. 124, 233–254.
Christiansen, H.J, Altaweel, M., 2004. Simulating a Bronze Age City StateUnder Stress. http://oi.uchicago.edu/OI/PROJ/MASS/papers.ht/SFI2004_MASS_2.pdf.
Cleary, P.W., Prakash, M., 2004. Discrete-element modelling andsmoothed particle hydrodynamics: potential in the environmental sci-ences. Philos. Trans. Roy. Soc. 362, 2003–2030.
Dean, J.S., Gumerman, G.J., Epstein, J.M., Axtell, R.L., Swedlund, A.C.,Parker, M.T., McCarroll, S., 1999. Understanding Anasazi culturechange through agent-based modeling. In: Kohler, T., Gumerman, G.(Eds.), Dynamics in Human and Primate Societies Santa Fe InstituteStudies in the Sciences of Complexity. OUP, Oxford, pp. 79–205.
De Angelis, D.L., Gross, L.J. (Eds.), 1992. Individual-based Models andApproaches in Ecology: Populations, Communities and Ecosystems.Chapman & Hall, London.
De Angelis, D.L., Mooij, W.M., 2005. Individual-based modeling of eco-logical and evolutionary processes. Annu. Rev. Ecol. Syst. 36, 147–168.
DeVuant, D., Amblard, F., Weisbuch, G., Faure, T., 2002. How can extrem-ism prevail? A study based on the relative agreement interaction model.J. Artif. Soc. Social Simul. 5 (4). http://jasss.soc.surrey.ac.uk/5/4/1.html.
Deutschman, D.H., Levin, S.A., Devine, C., Buttel, L.A., 1997. Scaling fromtrees to forest: analysis of a complex simulation model. Science 277, 1684.
Doran, J., 1998. Simulating collective misbelief. J. Artif. Soc. Social Simul.1 (1). http://jasss.soc.surrey.ac.uk/1/1/3.html.
Doran, J., Palmer, M., 1995. The EOS project: integrating two models ofpalaeolithic social change. In: Gilbert, N., Conte, R. (Eds.), ArtiWcialSocieties: The Computer Simulation of Social Life. UCL Press, Lon-don, pp. 103–126.
Draxler, R.R., Hess, G.D., 1998. An overview of the HYSPLIT_4 model-ling system for trajectories, dispersion and deposition. Aust. Met. Mag.47, 295–308.
Dray, A., Perez, P., Jones, N., Le Page, C., D’Aquino, P., White, I., Aua-tabu, T., 2006. The atoll game experience: from knowledge engineering
to a computer-assisted role playing game. J. Artif. Soc. Social Simul. 9(1). http://jasss.soc.surrey.ac.uk/9/1/6.html.
Durrett, R., Levin, S., 1994. The importance of being discrete (and spatial).Theor. Populat. Biol. 46, 363–394.
Edmonds, B., 1999. Gossip, sexual recombination, and the El Farol Bar:modelling the emergence of heterogeneity. J. Artif. Soc. Social Simul. 2(3). http://jasss.soc.surrey.ac.uk/2/3/2.html.
Edmonds, B., 2006. The emergence of symbiotic groups resulting fromskill-diVerentiation and tags. J. Artif. Soc. Social Simul. 9 (1). http://jasss.soc.surrey.ac.uk/9/1/10.html.
Epstein, E.M., Axtell, R., 1996. Growing ArtiWcial Societies: Social ScienceFrom the Bottom Up. Brookings Institute, Washington.
ETC/ACC, 2006. European topic on air and climate change. http://air-cli-mate.eionet.eu.int/.
Eubank, S., Guclu, H., Kumar, V.S.A., Marathe, M.V., Srinivasan, A.,Toroczkai, Z., Wang, N., 2004. Modelling disease outbreaks in realisticsocial networks. Nature 429, 180–184.
Findler, N.V., Malyankar, R.M., 1995. Emergent behaviour in societies ofheterogeneous interacting agents: alliances and norms. In: Gilbert, N.,Conte, R. (Eds.), ArtiWcial Societies: The Computer Simulation ofSocial Life. UCL Press, London, pp. 12–237.
Gilbert, N., 1995. Emergence in social simulation. In: Gilbert, N., Conte, R.(Eds.), ArtiWcial Societies: The Computer Simulation of Social Life.UCL Press, London, pp. 44–157.
Gilbert, N., Conte, R., 1995. ArtiWcial Societies: The Computer Simulationof Social Life. UCL Press, London.
Gilbert, N., den Besten, M., Bontovics, A., Craenen, B.G.W., Divina, F.,Eiben, A.E., GriYoen, R., Hevzi, G., Lorincz, A., Paechter, B., Schuster,S., Schut, M.C., Tzolov, C., Vogt, P., Yang, L., 2006. Emerging ArtiWcialSocieties through learning. J. Artif. Soc. Social Simul. 9 (2). http://jasss.soc.surrey.ac.uk/9/2/9.html.
Gilliam, R.C., Huber, A.H., Raman, S., 2005. Metropolitan-scale transportand dispersion from the New York World Trade Center following Sep-tember 11 2001. Part II: An application of the CALPUFF plumemodel. Pure Appl. Geophys. 162, 2005–2028.
Gimblett, H.R., 2002.Integrating Geographic Information Systems andAgent-based Modeling Techniques for simulating social and ecologicalprocesses Sante Fe Institute Studies in the Sciences of complexityOUP, Oxford.
Granovetter, M.S., 1973. The strength of weak ties. Am. J. Sociol. 78, 1360–1380.
Grimm, V., Railsback, S.F., 2005. Individual-based Modeling and Ecology.Princeton University Press, Princeton.
Hare, M., Deadman, P., 2004. Further towards a taxonomy of agent-basedsimulation models in environmental management. Math. Comput.Simul. 64, 25–40.
Heald, J., McEwan, I., Tait, S., 2004. Sediment Transport over a Xat bed ina unidirectional Xow: simulations and validation. Philos. Trans. Roy.Soc. Lond. A 362, 1973–1986.
Hegselmann, R., Krause, U., 2002. Opinion dynamics and bounded conW-dence: models, analysis and simulation. J. Artif. Soc. Social Simul. 5 (3).http://jasss.soc.surrey.ac.uk/5/3/2.html.
Helbing, D., 2001. TraYc and related self-driven many-particle systems.Rev. Mod. Phys. 73, 1067–1141.
Helbing, D., Farkas, I., Vicsek, T., 2000. Simulating dynamical features ofescape panic. Nature 407, 487–490.
Huston, M.A., De Angelis, D., Post, W., 1988. New computer models unifyecological theory. Bioscience 38, 682–691.
Hutchins, E., Hazlehurst, B., 1995. How to invent a lexicon: the developmentof shared symbols in interaction. In: Gilbert, N., Conte, R. (Eds.), ArtiWcialSocieties: The Computer Simulation of Social Life. UCL press, London.
Itami, R.M., 2002. Mobile agents with spatial intelligence. In: Gimblett,H.R. (Ed.), Integrating Geographic Information Systems and Agent-based Modeling Techniques for Simulating Social and Ecological Pro-cesses. In: Sante Fe Institute Studies in the Sciences of ComplexityOUP, Oxford, pp. 91–210.
Jerrett, M., Arain, A., Kanaroglou, P., Beckerman, B., Potoglou, D.,Sahsuvaroglu, T., Morrison, J., Giovis, C., 2005. A review and evalua-

642 M. Bithell et al. / Geoforum 39 (2008) 625–642
tion of intra-urban air pollution exposure models. J. Exposure Anal.Environ. Epidemiol. 15, 185–204.
Kammesheidt, L., Kohler, P., Huth, A., 2001. Sustainable timber harvest-ing in Venezuela: a modelling approach. J. Appl. Ecol. 38, 756–770.
Kottonau, J., Pahl Wöstl, C., 2004. Simulating political attitudes and vot-ing behavior. J. Artif. Soc. Social Simul. 7 (4). http://jasss.soc.sur-rey.ac.uk/7/4/6.html.
Koumoutsakos, P., 2005. Multiscale Xow simulations using particles. Ann.Rev. Fluid Mech. 37, 457–487.
Lake, M.W., 2000. MAGICAL computer simulation of mesolithic forag-ing. In: Kohler, T.A., Gumerman, G.J. (Eds.), Dynamics in Human andPrimate Societies. In: Sante Fe Institute Studies in the Sciences ofComplexity OUP, Oxford, pp. 107–145.
Linderman, M.A., An, L., Bearer, S., He, G., Ouyang, Z., Liu, J., 2005.Modeling the spatio-temporal dynamics and interactions of house-holds, landscapes and giant panda habitat. Ecol. Modell. 183, 47–65.
Makowsky, M., 2006. An agent-based model of mortality shocks, intergen-erational eVects and urban crime. J. Artif. Soc. Social Simul. 9 (2). http://jasss.soc.surrey.ac.uk/9/2/7.html.
Maryon, R.H., Best, M.J., 1995. Estimating emissions from a nuclear acci-dent using observations of radioactivity with dispersion model prod-ucts. Atmosph. Environ. 29, 1853–1869.
Matthews, R., 2006. The People and Landscape Model (PALM): towardsfull integration of human decision-making in biophysical simulationmodels. Ecol. Modell. 194, 329–343.
Milgram, S., 1967. The Small World Problem. Psychol. Today 1, 62–67.Möbius, M., Nagel, S., Jaeger, H., 2001. Size separation of granular parti-
cles. Nature 414, 270.Mogilner, A., Edelstein-Keshet, L., Bent, L., Spiros, A., 2003. Mutual inter-
actions, potentials, and individual distance in a social aggregation. J.Math. Biol. 27, 353–389.
Mollison, D., 1991. Dependence of epidemic and population velocities onbasic parameters. Math. Biosci. 107, 255–287.
Monaghan, J.J., 2005. Smoothed Particle Hydrodynamics. Rep. Prog.Phys. 68, 1703–1759.
Moss, S., Edmonds, B., 2005. Towards Good Social Science. J. Artif. Soc.Social Simul. 8 (4). http://jasss.soc.surrey.ac.uk/8/4/13.html.
Munjiza, A., 2004. The Combined Finite-Discrete Element Method. JohnWiley & Sons Ltd., Chichester.
Nagel, K., Stretz, P., Pieck, M., Leckey, S., Donnelly, R., Barrett, C.L.,1997. TRANSIMS traYc Xow characteristics. LA-RU 97-3531 LosAlamos Laboratory.
Oran, E.S., Boris, J.P., 2001. Numerical Simulation of Reactive Flow, sec-ond ed. CUP, Cambridge.
O’Sullivan, D., 2004. Complexity science and human geography. Trans.Inst. Br. Geogr. 29, 282–295.
O’Sullivan, D., Haklay, M., 2000. Agent-based models and individualism:is the world agent-based. Environ. Planning A 32, 1409–1425.
Pacala, S.W., Canham, C.D., Saponara, J., Silander, J.A., Kobe, R.K., Rib-bens, E., 1996. Forest models deWned by Weld measurements: estima-tion, error analysis and dynamics. Ecol. Monographs 66, 1–43.
Pepper, J.W., Smuts, B.B., 2000. The evolution of cooperation in an ecolog-ical context: an agent-based model. In: Kohler, T.A., Gumerman, G.J.(Eds.), Dynamics of Human and Primate Societies: Agent-based Mod-eling of Social and Spatial Processes. Oxford University Press, Oxford,pp. 5–76.
Ramanath, A.M., Gilbert, N., 2004. The design of participatory agent-based social simulations. J. Artif. Soc. Social Simul. 7 (4). http://jasss.soc.surrey.ac.uk/7/4/1.html.
Rand, D.A., Wilson, H.B., 1995. Using spatio-temporal chaos and interme-diate-scale determinism to quantify spatially-extended ecosystems.Proc. Roy. Soc. London B 259, 111–117.
Richards, K., Bithell, M., Dove, M., Hodge, R., 2004a. Discrete elementmodelling: methods and applications in the environmental sciences.Philos. Trans. Roy. Soc. Lond. A 362, 1797–1816.
Richards, K., Bithell, M., Bravo, M., 2004b. Space, time and science: indi-viduals, emergence and geographies of space and place. In: Matthews,J.A., Herbert, D.T. (Eds.), Unifying Geography: Common HeritageShared Future. Routledge, London, pp. 27–352.
Riley, K.W., 1995. Soil fertility maintenance for sustainable crop produc-tion in the Middle Hills of Nepal. In: Workshop on issues in soil fertil-ity and erosion in the middle mountains of Nepal, Integrated SurveySection, Topographical Survey Branch, Kathmandu, Nepal, 3–13.
Rudolph, M.L., Gerya, T.V., Yuen, D.A., 2005. Challenges in the visualiza-tion of a two-dimensional mantle dynamics simulation using one bil-lion tracers. In: Computational Fluid and Solid Mechanics 2005.Elsevier Science Ltd., Amsterdam, pp. 459–462.
Russell, S., Norvig, P., 2003. ArtiWcial Intelligence, A Modern Approach,second ed. Prentice Hall Series in ArtiWcial Intelligence, New York.
Ryall, D.B., Maryon, R.H., 1998. Validation of the UK Met OYce’s namemodel against the ETEX dataset. Atmosph. Environ. 32, 4265–4276.
Sakoda, J.M., 1971. The checkerboard model of social interaction. J. Math.Soc. 1, 119–132.
Sawyer, K.R., 2003. ArtiWcial societies: multi-agent systems and the micro–macro link in sociological theory. Sociol. Methods Res. 31, 325–363.
Schelling, T., 1971. Dynamic models of segregation. J. Math. Sociol. 1,143–186.
Shah, P.B., Schreier, H., 1995. Workshop on issues in soil fertility and ero-sion in the middle mountains of Nepal. Integrated Survey Section,Topographical Survey Branch, Kathmandu, Nepal.
Small, C.A., 2000. The political impact of marriage in a virtual polynesiansociety. In: Kohler, T.A., Gumerman, G.J. (Eds.), Dynamics in Humanand Primate Societies: Agent-Based Modeling of Social and SpatialProcesses. OUP, pp. 225–249.
StauVer, D., 2001. Monte Carlo simulations of Sznajd models. J. Artif. Soc.Social Simul. 5 (1). http://www.soc.surrey.ac.uk/JASSS/5/1/4.htm.
StauVer, D., Sousa, A., Schulze, C., 2004. Discretized opinion dynamics ofthe DeVuant model on scale-free networks. J. Artif. Soc. Social Simul. 7(3). http://jasss.soc.surrey.ac.uk/7/3/7.html.
Stohl, A., Eckhardt, S., Forster, C., James, P., Spichtinger, N., 2002. On thepathways and timscales of intercontinental air pollution transport. J.Geophys. Res. D 107, 4684. doi:10.1029/2001JD001396.
Sznajd-Weron, K., Sznajd, J., 2000. Opinion evolution in closed commu-nity. Int. J. Mod. Phys. C 11, 1157–1165.
Tesfatsion, L., 2002. Agent-based computational economics: growingeconomies from the bottom up. Artif. Life 8, 55–82.
USEPA, 2006. Website: US Environmental protection agency, http://www.epa.gov/.
White, D.R., 1999. Controlled simulation of marriage systems. J. Artif.Soc. Social Simul. 2 (3). http://jasss.soc.surrey.ac.uk/2/3/5.html.
Woolridge, M.J., 2001. Introduction to Multi-agent Systems. John Wiley &Sons Ltd., New York.
Younger, S., 2005. Violence and revenge in egalitarian societies. J. Artif.Soc. Social Simul. 8 (4). http://jasss.soc.surrey.ac.uk/8/4/11.html.
Ziervogel, G., Bithell, M., Washington, R., Downing, T., 2005. Agent-basedsocial simulation: a method for assessing the impact of seasonal cli-mate forecast applications among smallholder farmers. Agric. Syst. 83,1–26.
Top Related
Copyright © 2022 FDOKUMEN

