







Bahasa
Halaman
Hukum

LAPORAN AKHIR
PENELITIAN DISERTASI DOKTOR
INSTRUMENTASI PENGUJIAN FRAME BOGIE KERETA MONOREL
JENIS STRADDLE
PENGUSUL
Ir. Sugiharto MT.
NIDN: 0401126902
UNIVERSITAS PASUNDAN
OKTOBER 2016
Kode/Nama Rumpun Ilmu : 431/ Teknik Mesin (dan Ilmu Permesinan Lain)
i
HALAMAN PENGESAHAN
Judul : Instrumentasi Pengujian Frame Bogie Kereta Monorel Jenis
Straddle
Pelaksana
Nama Lengkap : Ir. Sugiharto, MT
NIDN : 0401126902
Jabatan Fungsional : Lektor Kepala
Program Studi : Teknik Mesin
Nomor HP : 08122358845
Alamat surel (e-mail) : [email protected] / [email protected]
Anggota (1)
Nama Lengkap : ………………………………………………………………
NIDN : ………………………………………………………………
Perguruan Tinggi : ………………………………………………………………
Anggota (2)
Nama Lengkap : ………………………………………………………………
NIDN : ………………………………………………………………
Perguruan Tinggi : ………………………………………………………………
Anggota (ke-n )
Nama Lengkap : ………………………………………………………………
NIDN : ………………………………………………………………
Perguruan Tinggi : ………………………………………………………………
Institusi Mitra (jika ada)
Nama Institusi Mitra : ………………………………………………………………
Alamat : ………………………………………………………………
Penanggung Jawab : ………………………………………………………………
Tahun Pelaksanaan : Tahun ke-1 (satu) dari rencana 1 (satu) tahun
Biaya Tahun Berjalan : Rp 46.000.000,00
Biaya Keseluruhan : Rp 46.000.000,00
Bandung, 31 Oktober 2016
Mengetahui,
Ketua Lembaga penelitian Ketua,
Dr. Hj. Erni Rusyani, SE., MM Ir. Sugiharto, MT
NIP/NIK 19620203 1991 032001 NIP/NIK 151 101 81

ii
RINGKASAN
Monorel terbagi dalam dua jenis yaitu suspended dan straddle. Jenis straddle
merupakan tipe monorel yang paling banyak digunakan sebagai sarana transportasi perkotaan,
monorel jenis ini memiliki kelebihan dapat diaplikasikan dalam berbagai jenis ukuran yang
disesuaikan dengan volume kebutuhan dan tingkat pelayanannya. Dilihat dari kelebihannya
monorel jenis ini dapat dijadikan solusi sarana transportasi diperkotaan pada jarak dekat dan
menegah. Solusi ini sangat sesuai dengan konsep sistem transit ringan untuk mobilitas
perkotaan dalam pembangunan sistem transportasi yang berkelanjutan.
Rancang bangun monorel mulai dilakukan di industri lokal Indonesia dalam kurun
waktu lima tahun terakhir ini. Hal penting yang harus diperhatikan dalam rancangan bangun
monorel di Indonesia adalah bagaimana monorel yang dibuat bisa digunakan secara aman,
nyaman dan mampu diaplikasikan pada berbagai kondisi topograpi perkotaan di Indonesia.
Pengujian merupakan parameter untuk menilai suatu desain struktur baik dengan
pembebanan statik maupun dinamik, begitu pula dalam proses rancang bangun monorel, proses
pengujian merupakan tahapan akhir yang harus dilakukan untuk menilai kekuatan dan
keandalan strukturnya.
Fokus riset dalam penelitian ini ditujukan pada perancangan dan penyusunan peralatan
instrumentasi dalam proses pengujian frame bogie monorel. Instrumetasi pengujian yang
berupa jig pemegang specimen, hidrolik system, kontrol pengendali penekanan, pembaca,
pengolah dan penyimpan data hasil pengukuran pada saat proses pengujian dilakukan
Kegiatan dimulai dengan studi standar pengujian yang dirujuk dalam hal ini standar EN
13749;2011. Kegiatan diawali dengan analisis posisi penempatan benda uji, dan posisi
pembebanan. Proses instrmentasi dilanjutkan dengan pemilihan jenis sensor dan pembuatan
rangkaian pembaca, pengolah dan penyimpan data hasil pengujian.
Hasil riset selain menghasilkan rangkaian instrumentasi pengujian frame bogie
monorel, juga diharapkan dapat menghasilkan temuan baru, HAKI, dan beberapa publikasi
ilmiah baik nasional maupun internasional.
iii
PRAKATA
Dengan memanjatkan puji dan syukur kehadirat Illahi Rabbi, kami tim peneliti dapat
menyelesaikan laporan Akhir kegiatan penelitian desertasi doktor tahun 2016, pada
kesempatan ini kami mengucapkan banyak terimakasih kepada:
Direktorat Jenderal Pendidikan Tinggi Kementrian Riset dan Pendidikan Tinggi
RepubIik Indonesia yang telah membiayai penelitian ini.
Ketua Lembaga Penelitian Universitas Pasundan yang telah menfasilitasi dan
membiayai penelitian ini.
Prof. Dr. Ir. Danardono AS, DEA., PE, selaku promotor penulis dalam penyelesaian
studi program doktor di DTM FT UI.
Dr. Ir. Gatot Prayogo, M.Eng, selaku ko-promotor penulis dalam penyelesaian studi
program doktor di DTM FT UI.
Seluruh pihak yang sudah banyak membantu kami dalam terlaksananya penelitian ini,
yang tidak bisa kami sebutkan satu per satu.
Besar harapan kami hasil penelitian ini dapat bermanfa’at bagi perkembangan industri nasional
khususnya dalam industri rancang bangun yang berbasis pada penguatan kandungan lokal.
Bagi tim peneliti sendiri semoga kegiatan ini semoga dapat bernilai ibadah dihadapan-Nya.
Bandung, Oktober 2016
Sugiharto
iv
DAFTAR ISI
HALAMAN PENGESAHAN.................................................................................................................. i
RINGKASAN ......................................................................................................................................... ii
PRAKATA iii
DAFTAR ISI .......................................................................................................................................... iv
DAFTAR TABEL ................................................................................................................................... v
DAFTAR GAMBAR ............................................................................................................................. vi
DAFTAR LAMPIRAN ......................................................................................................................... vii
BAB 1 PENDAHULUAN ...................................................................................................................... 1
1.1 Latar Belakang ..................................................................................................................... 1
1.2 Ruang Lingkup Penelitian dan Rumusan Permasalahan ...................................................... 5
1.3 Tujuan Khusus ..................................................................................................................... 5
1.4 Urgensi Penelitian ................................................................................................................ 6
1.5 Luaran dan Target Penelitian ............................................................................................... 6
BAB 2 TINJAUAN PUSTAKA ............................................................................................................. 7
2.1 State of The Art .................................................................................................................... 7
2.2 Hasil yang Sudah Dicapai .................................................................................................. 13
2.3 Peta Jalan Penelitian ........................................................................................................... 14
BAB 3 METODE PENELITIAN ......................................................................................................... 15
3.1 Sistematika Kegiatan Penelitian ......................................................................................... 15
3.2 Lokasi Penelitian ................................................................................................................ 17
BAB 4 HASIL DAN LUARAN YANG DICAPAI .............................................................................. 18
4.1 Rancangan Jig Pengujian ................................................................................................... 18
4.2 Sistem Pengujian ................................................................................................................ 19
4.3 Proses Pembuatan Jig dan Sistem Pengujian ..................................................................... 20
BAB 5 KESIMPULAN DAN SARAN ................................................................................................ 22
5.1 Kesimpulan ........................................................................................................................ 22
5.2 Saran ................................................................................................................................... 22
DAFTAR PUSTAKA ........................................................................................................................... 23
LAMPIRAN ............................................................................................................................................ 2
v
DAFTAR TABEL
Tabel 1. Klasifikasi moda trasportasi umum [2] ..................................................................................... 1
Tabel 2. Perbandingan Konsumsi Energi per km penumpang [5] .......................................................... 1
vi
DAFTAR GAMBAR
Gambar 1. Prototipe bogie monorel yang dikembangkan BPPT dan PT. INKA ...................... 2
Gambar 2. Prototipe monorel yang dikembangkan oleh PT. MBW .......................................... 3
Gambar 3. Peralatan uji statik dan dinamik di BBTKS-LUK ................................................... 4
Gambar 4. Posisi penempatan actuator pada pengujian statik frame bogie menurut standar
EN13749:2011 ........................................................................................................ 4
Gambar 5. Sistem koordinat dan arah deformasi pada frame bogie menurut standar EN
13749:2011.............................................................................................................. 5
Gambar 6. Klasifikasi teknologi monorel (sumber: http://www.monorail.org) ........................ 7
Gambar 7. Bentuk frame dan pengujian statiknya, Kim (2006) [13] ........................................ 9
Gambar 8. Pembagian kekuatan lelah (fatigue strength), Sonsino (2007) [14] ......................... 9
Gambar 9. Struktur utama frame bogie dengan gaya vertikal, transversal dan longitudinal,
Kassner (2012) [15] .............................................................................................. 10
Gambar 10. Kurva S-N; Nominal sress diperbolehkan pada baja struktur (Pf = 2,3%) .......... 11
Gambar 11. Bogie Monorel Model I Hasil Pengembangan Bersama PT. MBW .................... 12
Gambar 12. Bogie Monorel Model II; Hasil Pengembangan Bersama PT. MBW................. 12
Gambar 13. Analisis kekuatan statik frame model I ................................................................ 13
Gambar 14. Analisis kekuatan statik frame model II .............................................................. 13
Gambar 15. Prototipe Frame dalam tahap proses pembuatan.................................................. 13
Gambar 16. Tahapan penelitian pengembangan model bogie kereta monorel ........................ 14
Gambar 17. Peta jalan (road map) kegiatan penelitian ............................................................ 14
Gambar 18. Metodologi dan sistematika kegiatan penelitian desertasi ................................... 15
Gambar 19. Metodologi dan sistematika penelitian ................................................................ 16
Gambar 20. Rancangan jig pengujian untuk pengujian pin bolster ......................................... 18
Gambar 21. Rancangan jig pengujian untuk pengujian spindle axle ....................................... 18
Gambar 22. Rancangan jig pengujian untuk pengujian hanger shaft ...................................... 19
Gambar 23. Hydraulic power pack .......................................................................................... 19
Gambar 24. Proses pembuatan jig ........................................................................................... 20
Gambar 25. Hydrolic cylinder dan power pack ....................................................................... 21
Gambar 26. Electic control for hydrolic cylinder and power pack .......................................... 21

vii
DAFTAR LAMPIRAN
Lampiran 1 Gambar teknik jig pengujian
Lampiran 2 Publikasi
BAB 1 PENDAHULUAN
1.1 Latar Belakang
Moda transportasi umum di Indonesia jenisnya sangat beraneka ragam. Semua jenis
moda ini ditujukan untuk melayani kebutuhan masyarakat akan jasa angkutan umum massal
yang murah. Akan tetapi keberadaannya saat ini belum mampu menjawab tuntutan masyarakat
dalam hal keamanan, kenyamanan, dan ketepatan datang dan tiba ditujuan. Akibatnya
masyarakat lebih memilih angkutan pribadi yang berakibat pada naiknya volume kendaraan
dijalanan. Hasil survey The Study on Integrated Transportation Master Plan (SITRAMP)
tahun 2004, kerugian ekonomi di Jabotabek akibat kemacetan jika dinilai dalam bentuk uang
adalah sebesar 12.8 triliun pertahun [1].
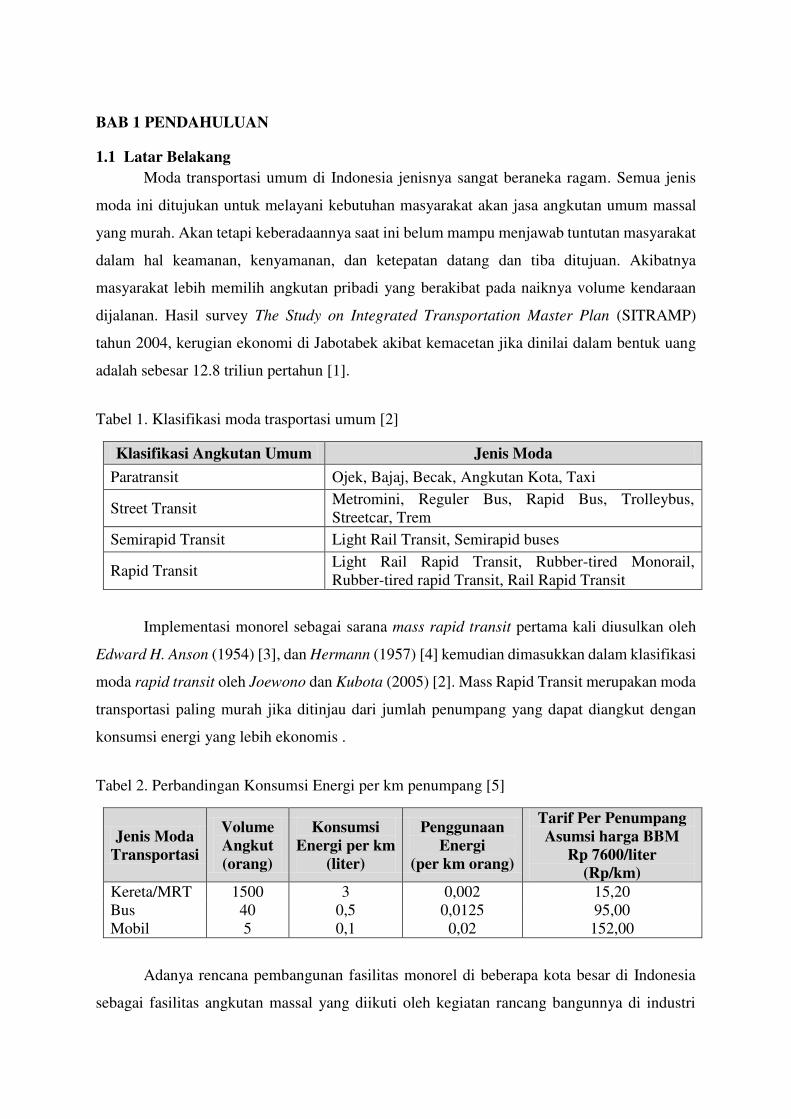
Tabel 1. Klasifikasi moda trasportasi umum [2]
Klasifikasi Angkutan Umum Jenis Moda
Paratransit Ojek, Bajaj, Becak, Angkutan Kota, Taxi
Street Transit Metromini, Reguler Bus, Rapid Bus, Trolleybus,
Streetcar, Trem
Semirapid Transit Light Rail Transit, Semirapid buses
Rapid Transit Light Rail Rapid Transit, Rubber-tired Monorail,
Rubber-tired rapid Transit, Rail Rapid Transit
Implementasi monorel sebagai sarana mass rapid transit pertama kali diusulkan oleh
Edward H. Anson (1954) [3], dan Hermann (1957) [4] kemudian dimasukkan dalam klasifikasi
moda rapid transit oleh Joewono dan Kubota (2005) [2]. Mass Rapid Transit merupakan moda
transportasi paling murah jika ditinjau dari jumlah penumpang yang dapat diangkut dengan
konsumsi energi yang lebih ekonomis .
Tabel 2. Perbandingan Konsumsi Energi per km penumpang [5]
Jenis Moda
Transportasi
Volume
Angkut
(orang)
Konsumsi
Energi per km
(liter)
Penggunaan
Energi
(per km orang)
Tarif Per Penumpang
Asumsi harga BBM
Rp 7600/liter
(Rp/km)
Kereta/MRT 1500 3 0,002 15,20
Bus 40 0,5 0,0125 95,00
Mobil 5 0,1 0,02 152,00
Adanya rencana pembangunan fasilitas monorel di beberapa kota besar di Indonesia
sebagai fasilitas angkutan massal yang diikuti oleh kegiatan rancang bangunnya di industri

2
lokal Indonesia perlu diapresiasi secara maksimal baik oleh pemerintah sebagai regulator
maupun pihak akademisi yang memiliki kemampuan menilai layak gunanya.
Kegiatan riset ini diharapkan memberikan dampak yang luas terhadap perkembangan
Industri dan teknologi di Indonesia, khususnya bagi industri lokal pembuat monorel, serta
kemajuan pendidikan tinggi di Indonesia. Proses rancang bangun dilakukan secara kolaboratif
atas kemampuan desain yang dimiliki oleh industri dan perguruan tinggi dengan tujuan untuk
mempermudah proses transfer ilmu pengetahuan dan teknologi antara peneliti dari perguruan
tinggi dan para praktisi yang ada di Industri. Kolaborasi proses rancang bangun ini diharapkan
dapat menghasilkan desain analisis bogie monorel yang dapat dimanufaktur untuk skala uji
jalan selanjutnya. Kegiatan rancang bangun monorel di dalam negeri dimulai sejak tahun 2006,
BPPT dan PT. INKA merintis kegiatan rancang bangun tersebut. Pihak swasta tidak
ketinggalan dalam kegiatan ini, PT. Melu Bangun Wiweka (MBW) / PT. Flobbus Indonesia ikut
mengembangkan desain monorel, monorel yang dikembangkan PT. MBW / PT. Flobbus
Indonesia saat ini sudah sampai ditahap pengujian prototipe.
Gambar 1. Prototipe bogie monorel yang dikembangkan BPPT dan PT. INKA
Hal penting yang harus diperhatikan dalam rancangan bangun monorel di Indonesia
adalah bagaimana monorel harus dapat dioperasikan secara aman, nyaman dan mampu
bermanuver pada berbagai kondisi topograpi yang umumnya merupakan perkotaan dimana
kondisi tata ruang kotanya tidak disiapkan untuk pembangunan fasilitas dan instalasi monorel
untuk sistem transportasi massalnya. Dalam kondisi tersebut sangat dimungkinkan adanya
tuntutan desain yang melebihi standar desain monorel pada umumnya. Standar desain yang
perlu disiapkan dan ditingkatkan adalah: kekuatan struktur frame yang merupakan komponen
utama bogie yang tidak boleh gagal (failed) pada saat dioperasikan, kemampuan putar (turning-
ability) dan kemampuan untuk menanjaknya (gradient-ability). Saat ini kemampuan putar
minimum monorel sekitar radius 60 m, sedangkan mampu menanjaknya berkisar pada gradien
diantara 5% hingga 6 %.
3
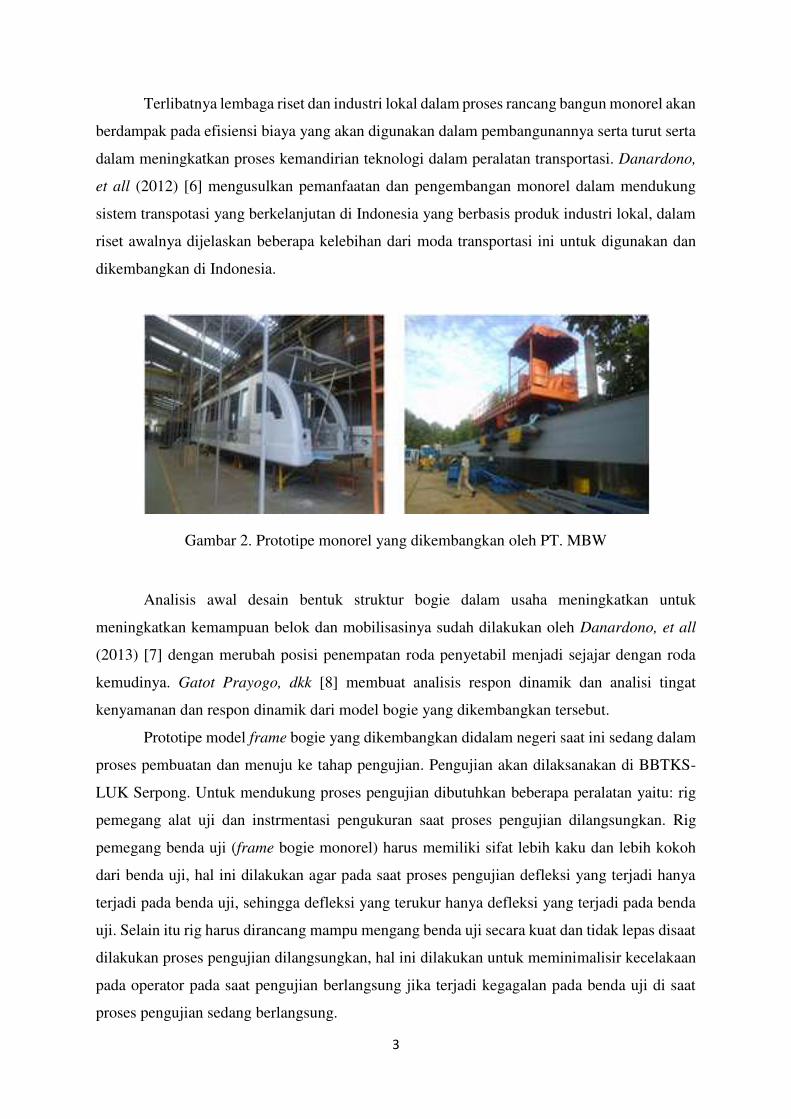
Terlibatnya lembaga riset dan industri lokal dalam proses rancang bangun monorel akan
berdampak pada efisiensi biaya yang akan digunakan dalam pembangunannya serta turut serta
dalam meningkatkan proses kemandirian teknologi dalam peralatan transportasi. Danardono,
et all (2012) [6] mengusulkan pemanfaatan dan pengembangan monorel dalam mendukung
sistem transpotasi yang berkelanjutan di Indonesia yang berbasis produk industri lokal, dalam
riset awalnya dijelaskan beberapa kelebihan dari moda transportasi ini untuk digunakan dan
dikembangkan di Indonesia.
Gambar 2. Prototipe monorel yang dikembangkan oleh PT. MBW
Analisis awal desain bentuk struktur bogie dalam usaha meningkatkan untuk
meningkatkan kemampuan belok dan mobilisasinya sudah dilakukan oleh Danardono, et all
(2013) [7] dengan merubah posisi penempatan roda penyetabil menjadi sejajar dengan roda
kemudinya. Gatot Prayogo, dkk [8] membuat analisis respon dinamik dan analisi tingat
kenyamanan dan respon dinamik dari model bogie yang dikembangkan tersebut.
Prototipe model frame bogie yang dikembangkan didalam negeri saat ini sedang dalam
proses pembuatan dan menuju ke tahap pengujian. Pengujian akan dilaksanakan di BBTKS-
LUK Serpong. Untuk mendukung proses pengujian dibutuhkan beberapa peralatan yaitu: rig
pemegang alat uji dan instrmentasi pengukuran saat proses pengujian dilangsungkan. Rig
pemegang benda uji (frame bogie monorel) harus memiliki sifat lebih kaku dan lebih kokoh
dari benda uji, hal ini dilakukan agar pada saat proses pengujian defleksi yang terjadi hanya
terjadi pada benda uji, sehingga defleksi yang terukur hanya defleksi yang terjadi pada benda
uji. Selain itu rig harus dirancang mampu mengang benda uji secara kuat dan tidak lepas disaat
dilakukan proses pengujian dilangsungkan, hal ini dilakukan untuk meminimalisir kecelakaan
pada operator pada saat pengujian berlangsung jika terjadi kegagalan pada benda uji di saat
proses pengujian sedang berlangsung.
4
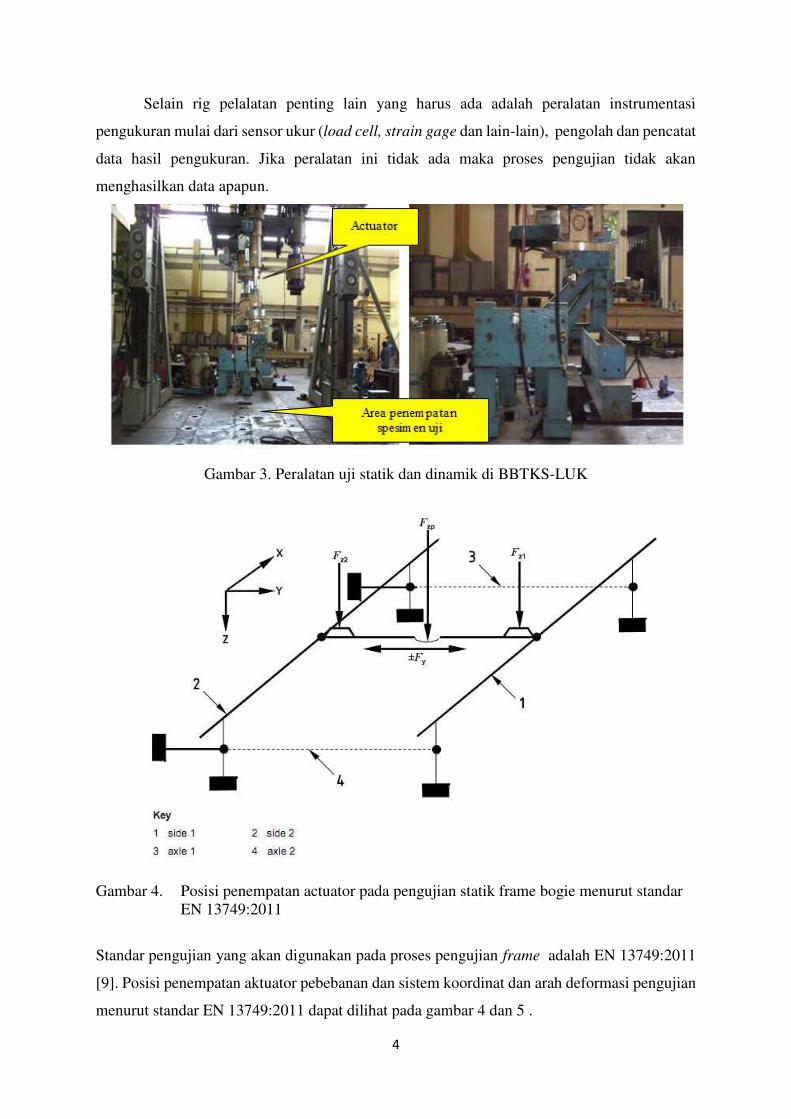
Selain rig pelalatan penting lain yang harus ada adalah peralatan instrumentasi
pengukuran mulai dari sensor ukur (load cell, strain gage dan lain-lain), pengolah dan pencatat
data hasil pengukuran. Jika peralatan ini tidak ada maka proses pengujian tidak akan
menghasilkan data apapun.
Gambar 3. Peralatan uji statik dan dinamik di BBTKS-LUK
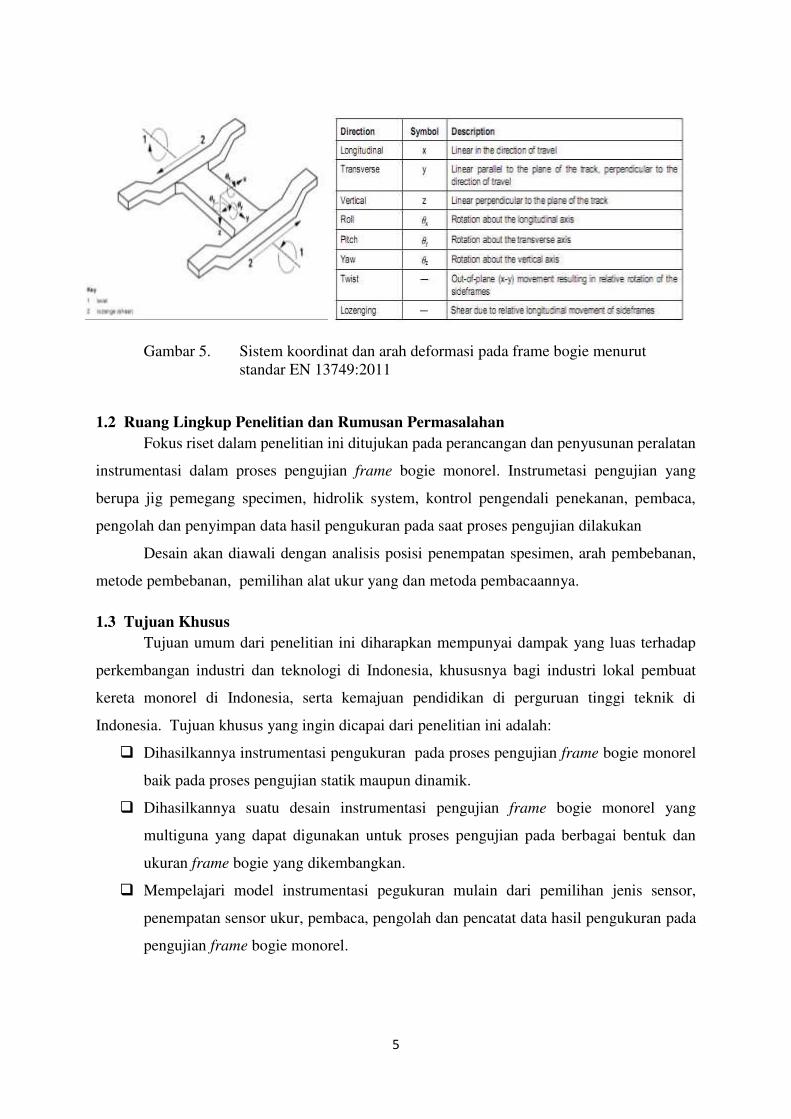
Gambar 4. Posisi penempatan actuator pada pengujian statik frame bogie menurut standar
EN 13749:2011
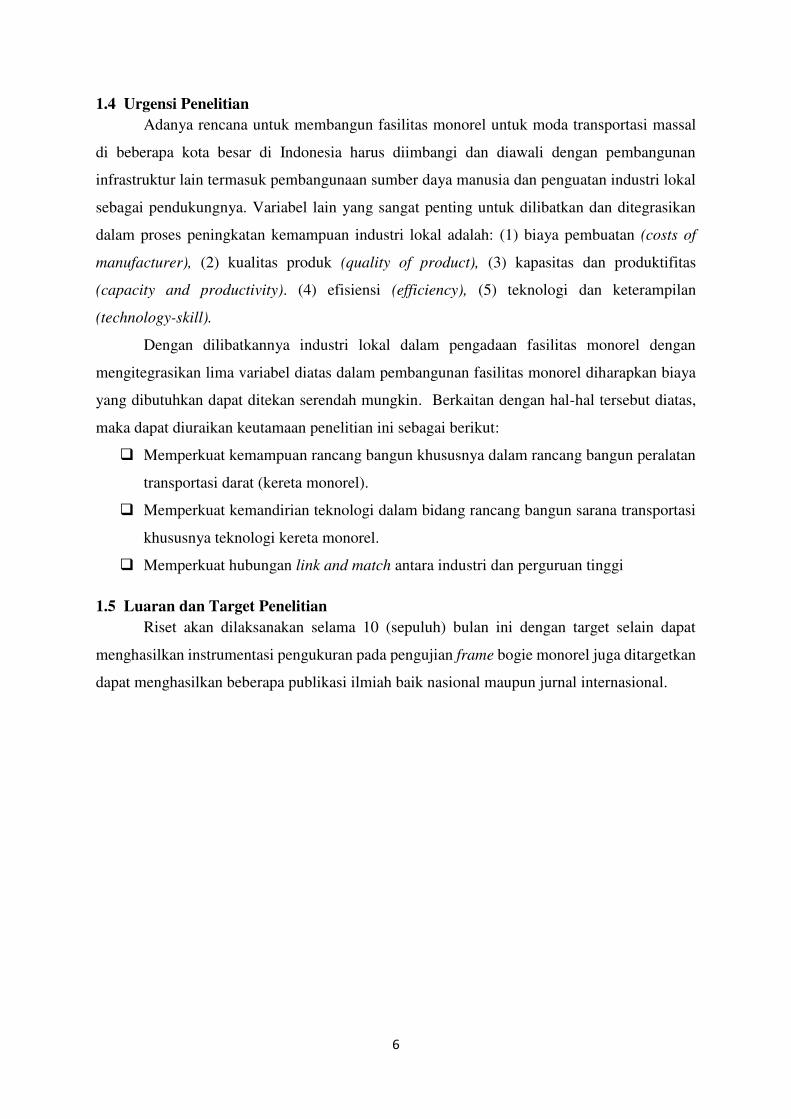
Standar pengujian yang akan digunakan pada proses pengujian frame adalah EN 13749:2011
[9]. Posisi penempatan aktuator pebebanan dan sistem koordinat dan arah deformasi pengujian
menurut standar EN 13749:2011 dapat dilihat pada gambar 4 dan 5 .
5
Gambar 5. Sistem koordinat dan arah deformasi pada frame bogie menurut
standar EN 13749:2011
1.2 Ruang Lingkup Penelitian dan Rumusan Permasalahan
Fokus riset dalam penelitian ini ditujukan pada perancangan dan penyusunan peralatan
instrumentasi dalam proses pengujian frame bogie monorel. Instrumetasi pengujian yang
berupa jig pemegang specimen, hidrolik system, kontrol pengendali penekanan, pembaca,
pengolah dan penyimpan data hasil pengukuran pada saat proses pengujian dilakukan
Desain akan diawali dengan analisis posisi penempatan spesimen, arah pembebanan,
metode pembebanan, pemilihan alat ukur yang dan metoda pembacaannya.
1.3 Tujuan Khusus
Tujuan umum dari penelitian ini diharapkan mempunyai dampak yang luas terhadap
perkembangan industri dan teknologi di Indonesia, khususnya bagi industri lokal pembuat
kereta monorel di Indonesia, serta kemajuan pendidikan di perguruan tinggi teknik di
Indonesia. Tujuan khusus yang ingin dicapai dari penelitian ini adalah:
Dihasilkannya instrumentasi pengukuran pada proses pengujian frame bogie monorel
baik pada proses pengujian statik maupun dinamik.
Dihasilkannya suatu desain instrumentasi pengujian frame bogie monorel yang
multiguna yang dapat digunakan untuk proses pengujian pada berbagai bentuk dan
ukuran frame bogie yang dikembangkan.
Mempelajari model instrumentasi pegukuran mulain dari pemilihan jenis sensor,
penempatan sensor ukur, pembaca, pengolah dan pencatat data hasil pengukuran pada
pengujian frame bogie monorel.
6
1.4 Urgensi Penelitian
Adanya rencana untuk membangun fasilitas monorel untuk moda transportasi massal
di beberapa kota besar di Indonesia harus diimbangi dan diawali dengan pembangunan
infrastruktur lain termasuk pembangunaan sumber daya manusia dan penguatan industri lokal
sebagai pendukungnya. Variabel lain yang sangat penting untuk dilibatkan dan ditegrasikan
dalam proses peningkatan kemampuan industri lokal adalah: (1) biaya pembuatan (costs of
manufacturer), (2) kualitas produk (quality of product), (3) kapasitas dan produktifitas
(capacity and productivity). (4) efisiensi (efficiency), (5) teknologi dan keterampilan
(technology-skill).
Dengan dilibatkannya industri lokal dalam pengadaan fasilitas monorel dengan
mengitegrasikan lima variabel diatas dalam pembangunan fasilitas monorel diharapkan biaya
yang dibutuhkan dapat ditekan serendah mungkin. Berkaitan dengan hal-hal tersebut diatas,
maka dapat diuraikan keutamaan penelitian ini sebagai berikut:
Memperkuat kemampuan rancang bangun khususnya dalam rancang bangun peralatan
transportasi darat (kereta monorel).
Memperkuat kemandirian teknologi dalam bidang rancang bangun sarana transportasi
khususnya teknologi kereta monorel.
Memperkuat hubungan link and match antara industri dan perguruan tinggi
1.5 Luaran dan Target Penelitian
Riset akan dilaksanakan selama 10 (sepuluh) bulan ini dengan target selain dapat
menghasilkan instrumentasi pengukuran pada pengujian frame bogie monorel juga ditargetkan
dapat menghasilkan beberapa publikasi ilmiah baik nasional maupun jurnal internasional.
7
BAB 2 TINJAUAN PUSTAKA
2.1 State of The Art
Monorel adalah salah satu moda transportasi berbasis rel tunggal sebagai penuntunnya
(guide way). Istilah ini digunakan untuk menggambarkan sistem atau kendaraan berjalan di
atas balok atau track sebagai menuntun arah tujuan. Istilah ini berasal dari gabungan kata mono
(tunggal) dengan rail (rel), dan digunakan sejak tahun 1897. Sedangkan sistem light rail
menggunakan rel ganda sebagai penuntun gerakannya. Kendaraan yang berjalan pada rel
tunggal pertama dipatenkan oleh Henry Robinson Palmer di Inggris dengan nomor paten 4618
tanggal 22 November 1821 [4].
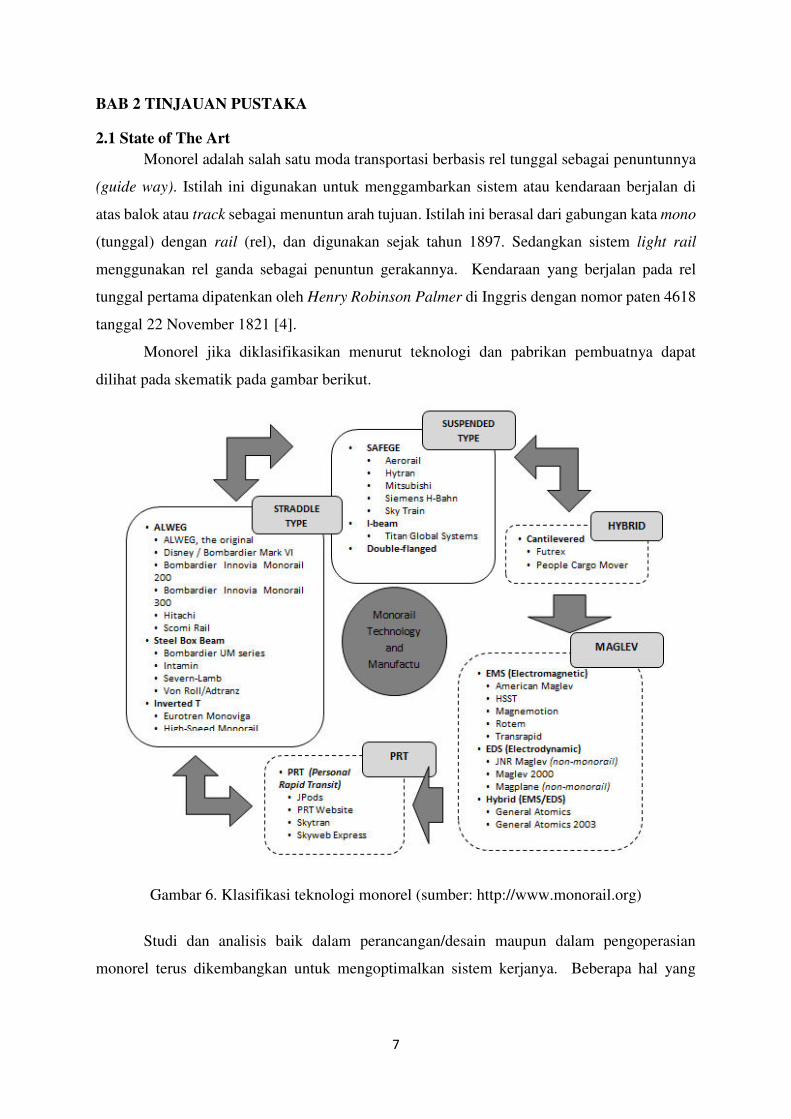
Monorel jika diklasifikasikan menurut teknologi dan pabrikan pembuatnya dapat
dilihat pada skematik pada gambar berikut.
Gambar 6. Klasifikasi teknologi monorel (sumber: http://www.monorail.org)
Studi dan analisis baik dalam perancangan/desain maupun dalam pengoperasian
monorel terus dikembangkan untuk mengoptimalkan sistem kerjanya. Beberapa hal yang
8
menjadi pusat perhatian dalam studi dan analisis monorel jenis mengangkang (straddle) dapat
dijelaskan sebagai berikut:
Sistem monorel (monorail system)
Jalur lintasan dan sistem peralihan (guideway and switching system)
Bogie dan sistem suspensi (bogie and suspension system)
Sitem kelistrikan dan sinyal (Electrical and signal system)
Monorel merupakan sistem dinamis yang kompleks dengan banyak derajat kebebasan
(MDOF). Gerak laju monorel dipengaruhi oleh geometri dan ketahanan jalur lntasan, interaksi
antara roda dan lintasan, suspensi, dan inersia dari komponen-komponen pendukungnya. Bogie
pada monorel merupakan unit kompleks yang berfungsi mengatur keselarasan gerak pada
bebagai kondisi kecepatan, dan kondisi lintasan yang dilaluinya. Adanya permintan struktur
yang lebih ringan akan menekan rasio berat monorel terhadap berat total penumpang yang
diangkut, padahal bogie pada monorel memiliki proporsi yang signifikan terhadap berat total
monorel. Mengurangi massa merupakan aspek penting yang perlu dilalukan untuk efisiesi
energi, akan tetapi kondisi ini berpotensi pada naiknya tingkat kesulitan dalam desain. Hal lain
yang dapat meningkatkan tingkat kesulitan dalam desain adalah tuntutan kemampuan untuk
bergerak pada berbagai lintasan dengan radius belok (turning radius) yang kecil dan
kemampuan menanjak (gradient ability) yang relatif besar, serta sistem pengoperasian yang
dituntut memiliki respon yang tinggi disaat melakukan percepatan dan disaat melakukan
perlambatan. Konsekuensi dari semua faktor ini adalah naiknya kerusakan pada komponen
yang mendukungnya.
Luo (1996) [10] melakukan analisis pada struktur frame bogie kereta berdasarkan
simulasi dinamis komputer dengan kondisi operasi yang sama dengan lingkungan kerjanya.
Hasil analisis frame bogie sangat sensitif terhadap beban torsi pada kondisi lintasan
memutar/belok. Hal ini juga menunjukkan bahwa potensi kegagalan frame bogie dapat
diprediksi pada tahap simulasi dengan menempatkan frame bogie sesuai dengan lingkungan
kerjanya. Analisis dilakukan dua tahap tahap pertama meliputi penentuan kondisi batas dan
penentuan beban maksimum yang dapat diterima oleh struktur frame bogie tanpa
mengakibatkan deformasi plastis atau distorsi secara permanen. Tahap kedua adalah analisis
ketahanan terhadap beban berulang yang diakibatkan oleh ketidakteraturan lintasan yang
dilalui. Analisis tahap pertama yang merupakan analisis tegangan yang terjadi dapat digunakan
untuk analisis tahapa kedua dalam mengevaluasi umur lelah (fatigue life) dari frame bogie yang
didesain. Pendekatan ini merupakan jembatan antara desain yang didasarkan pada kondisi
9
pembebanan dan desain kelelahan (fatigue design) yang didasarkan pada simulasi beban
dinamik yang diterimanya. Kondisi ini menunjukkan pentingnya suatu pemodelan suatu
struktur dinamis dalam lingkungan kerjanya pada tahap proses desain.
Survei yang memuat perkembangan rekayasa kelelahan material pada struktur,
kelelahan sebagai fenomena material diprediksi untuk sifat kelelahan struktur dilakukan oleh
Schijve (2003) [11]. Gambaran luas dari masalah kelelahan (fatigue problems) dalam aplikasi
kereta disajikan oleh Smith (2005) [12]. Analisis difokuskan pada masalah kelelahan
khususnya untuk industri kereta api, yaitu pada analisis kontak antar muka pada roda dan rel.
Pertimbangan analisis kontak tersebut akan mengarah pada pentingnya analisis beban yang
bekerja secara dinamis.
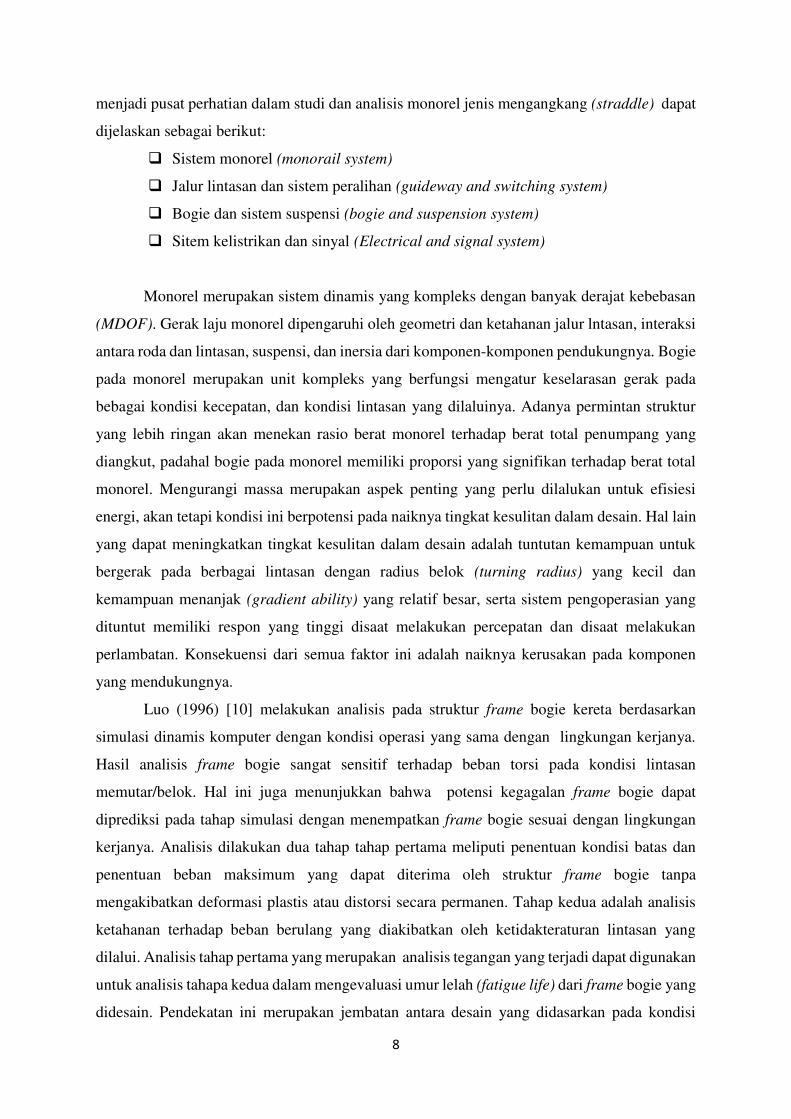
Gambar 7. Bentuk frame dan pengujian statiknya, Kim (2006) [13]
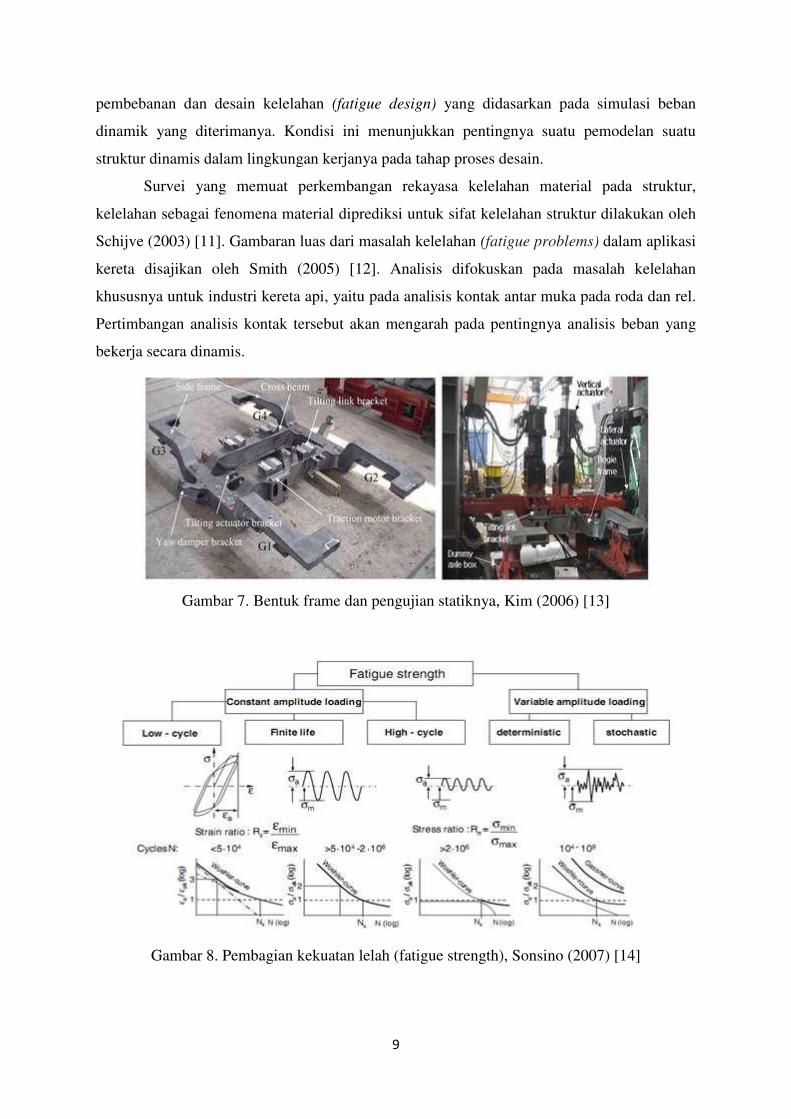
Gambar 8. Pembagian kekuatan lelah (fatigue strength), Sonsino (2007) [14]
10
Studi menilai kekuatan lelah frame bogie dilakukan oleh Kim (2006) [13], analisis
dinamik dilakukan dengan metoda sistem benda jamak (multibody) untuk melacak besar
pembebanan yang terjadi yang merupakan fungsi dari lintasan yang dilaluinya, analisis
tegangan dilakukan dengan metoda elemen hingga, untuk memavalidasi hasil analisis
dilakukan pengujian secara statik yang mengevaluasi pada daerah kritis dari hasil analisis
elemen hingga. Hasil analisis dibandingkan dan di plot dengan menggunakan diagram
Goodman, sehingga kekuatan lelah (fatigue stenght) frame bogie dapat dinilai dengan
pengujian statis.
Sonsino (2007) [14], menjelaskan proses penggunaan kurva S-N dalam desain
komponen pada rezim siklus pembebanan tinggi. Dalam penjelasannya kekuatan lelah (fatigue
strength) jika ditinjau dari bentuk pembebanannya dapat dibagi dua seperti terlihat pada
gambar 8. Suatu elemen struktur tidak akan mengalami kegagalan selama masih berada pada
batas lelah dari materialnya.
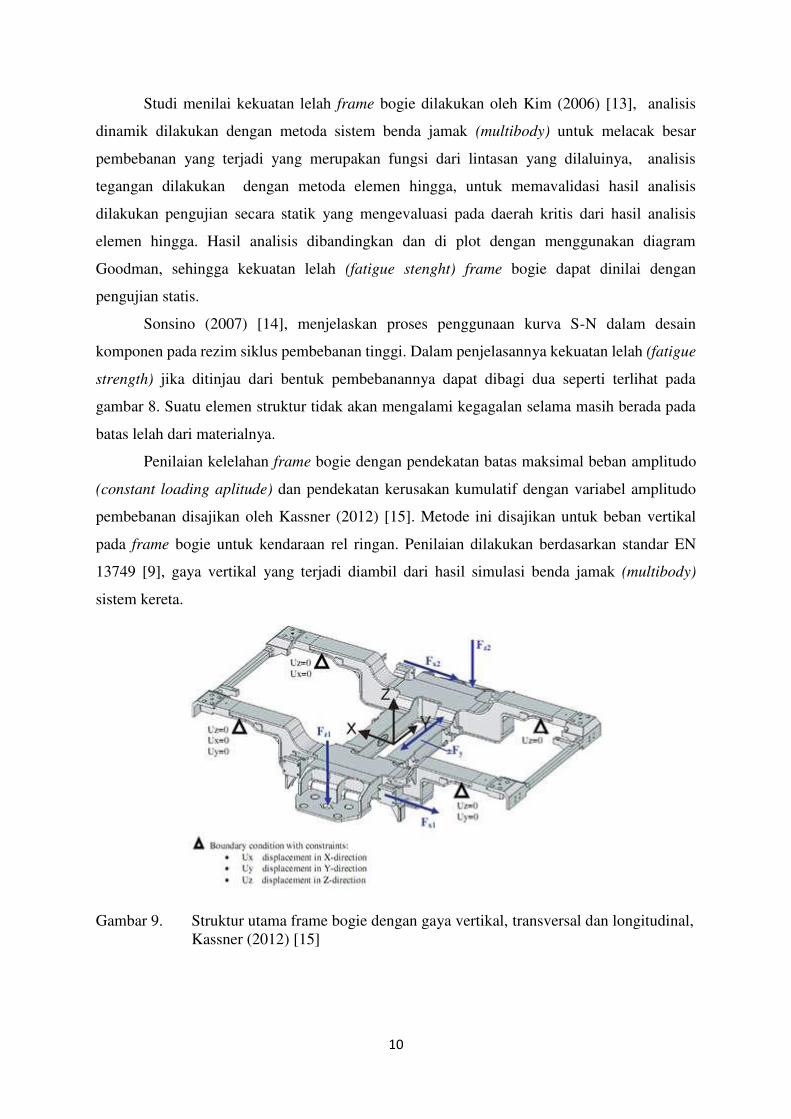
Penilaian kelelahan frame bogie dengan pendekatan batas maksimal beban amplitudo
(constant loading aplitude) dan pendekatan kerusakan kumulatif dengan variabel amplitudo
pembebanan disajikan oleh Kassner (2012) [15]. Metode ini disajikan untuk beban vertikal
pada frame bogie untuk kendaraan rel ringan. Penilaian dilakukan berdasarkan standar EN
13749 [9], gaya vertikal yang terjadi diambil dari hasil simulasi benda jamak (multibody)
sistem kereta.
Gambar 9. Struktur utama frame bogie dengan gaya vertikal, transversal dan longitudinal,
Kassner (2012) [15]
11
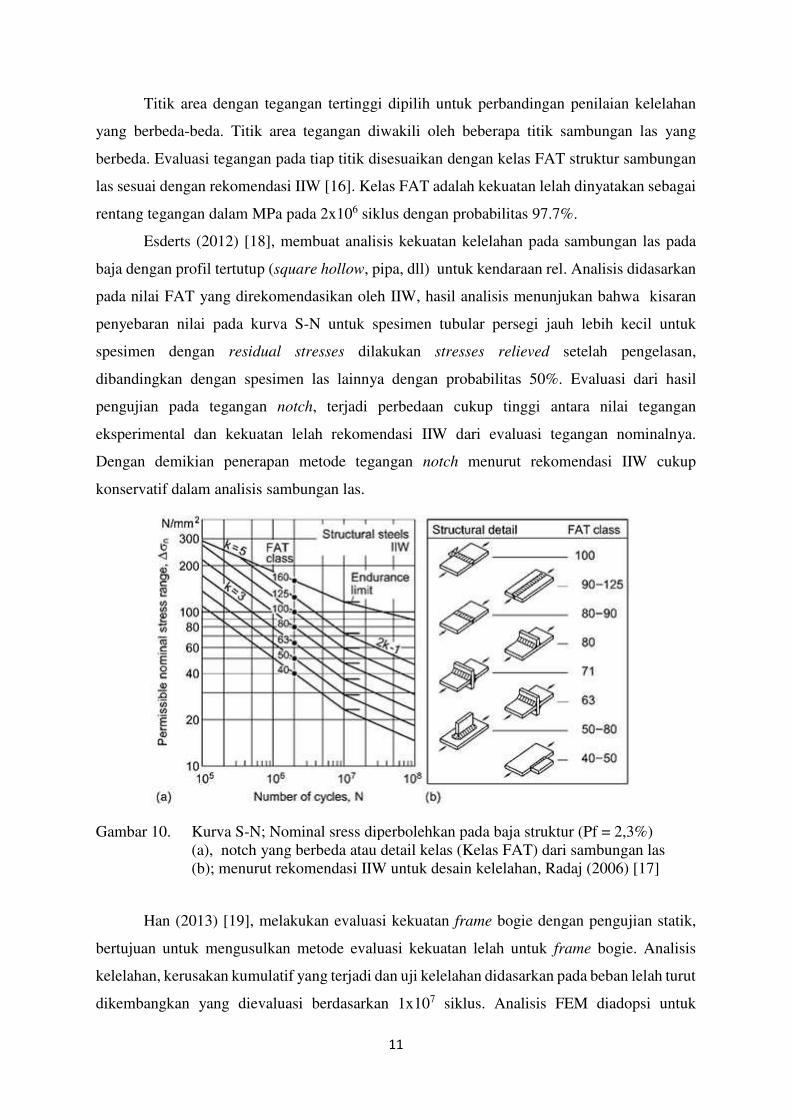
Titik area dengan tegangan tertinggi dipilih untuk perbandingan penilaian kelelahan
yang berbeda-beda. Titik area tegangan diwakili oleh beberapa titik sambungan las yang
berbeda. Evaluasi tegangan pada tiap titik disesuaikan dengan kelas FAT struktur sambungan
las sesuai dengan rekomendasi IIW [16]. Kelas FAT adalah kekuatan lelah dinyatakan sebagai
rentang tegangan dalam MPa pada 2x106 siklus dengan probabilitas 97.7%.
Esderts (2012) [18], membuat analisis kekuatan kelelahan pada sambungan las pada
baja dengan profil tertutup (square hollow, pipa, dll) untuk kendaraan rel. Analisis didasarkan
pada nilai FAT yang direkomendasikan oleh IIW, hasil analisis menunjukan bahwa kisaran
penyebaran nilai pada kurva S-N untuk spesimen tubular persegi jauh lebih kecil untuk
spesimen dengan residual stresses dilakukan stresses relieved setelah pengelasan,
dibandingkan dengan spesimen las lainnya dengan probabilitas 50%. Evaluasi dari hasil
pengujian pada tegangan notch, terjadi perbedaan cukup tinggi antara nilai tegangan
eksperimental dan kekuatan lelah rekomendasi IIW dari evaluasi tegangan nominalnya.
Dengan demikian penerapan metode tegangan notch menurut rekomendasi IIW cukup
konservatif dalam analisis sambungan las.
Gambar 10. Kurva S-N; Nominal sress diperbolehkan pada baja struktur (Pf = 2,3%)
(a), notch yang berbeda atau detail kelas (Kelas FAT) dari sambungan las
(b); menurut rekomendasi IIW untuk desain kelelahan, Radaj (2006) [17]
Han (2013) [19], melakukan evaluasi kekuatan frame bogie dengan pengujian statik,
bertujuan untuk mengusulkan metode evaluasi kekuatan lelah untuk frame bogie. Analisis
kelelahan, kerusakan kumulatif yang terjadi dan uji kelelahan didasarkan pada beban lelah turut
dikembangkan yang dievaluasi berdasarkan 1x107 siklus. Analisis FEM diadopsi untuk
12
kombinasi beban, hasilnya menunjukkan bahwa semua data berada di bawah batas kelelahan
sambungan las jenis butt. Hasil analisis di plot dengan menggunakan diagram Goodman.
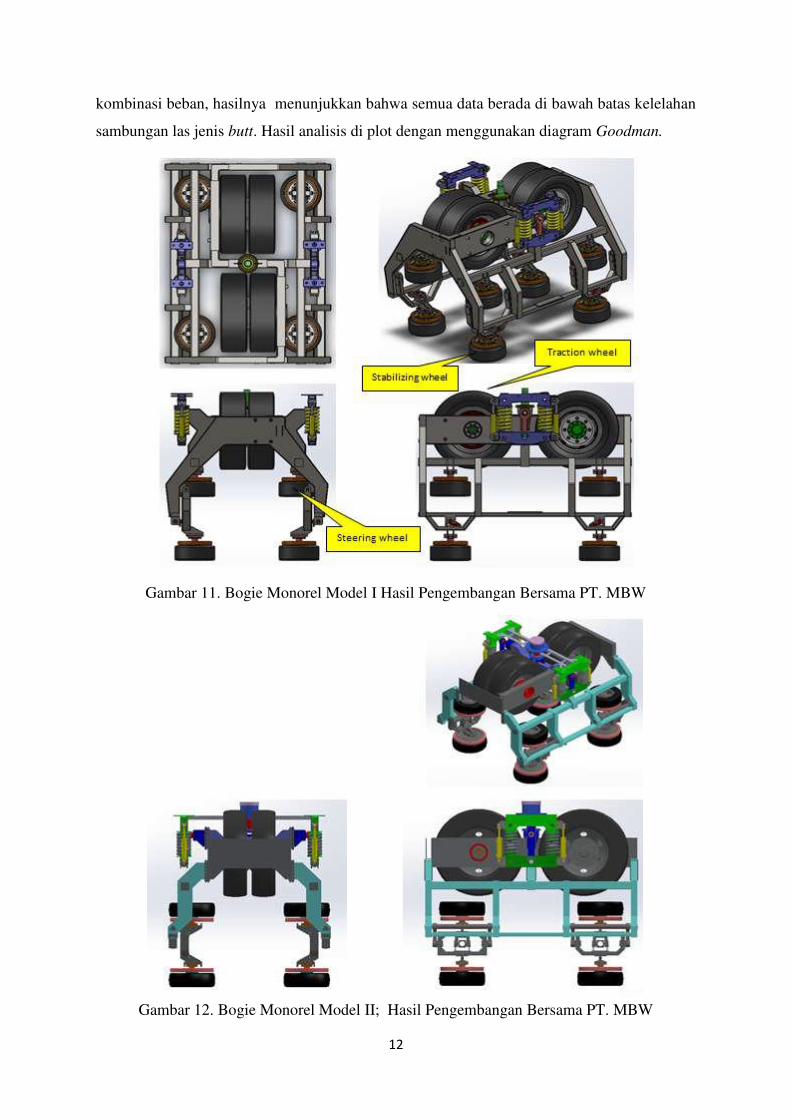
Gambar 11. Bogie Monorel Model I Hasil Pengembangan Bersama PT. MBW
Gambar 12. Bogie Monorel Model II; Hasil Pengembangan Bersama PT. MBW
13
Dari hasil studi pustaka yang sudah dilakukan proses pengujian merupakan tahapan
akhir yang digunakan untuk validasi tingkat kekuatan dari suatu proses desain frame bogie.
Hasil pengujian merupakan dasar penilaian apakah frame yang dibuat sudah cukup aman untuk
digunakan atau masih perlu proses perbaikan selanjutnya.
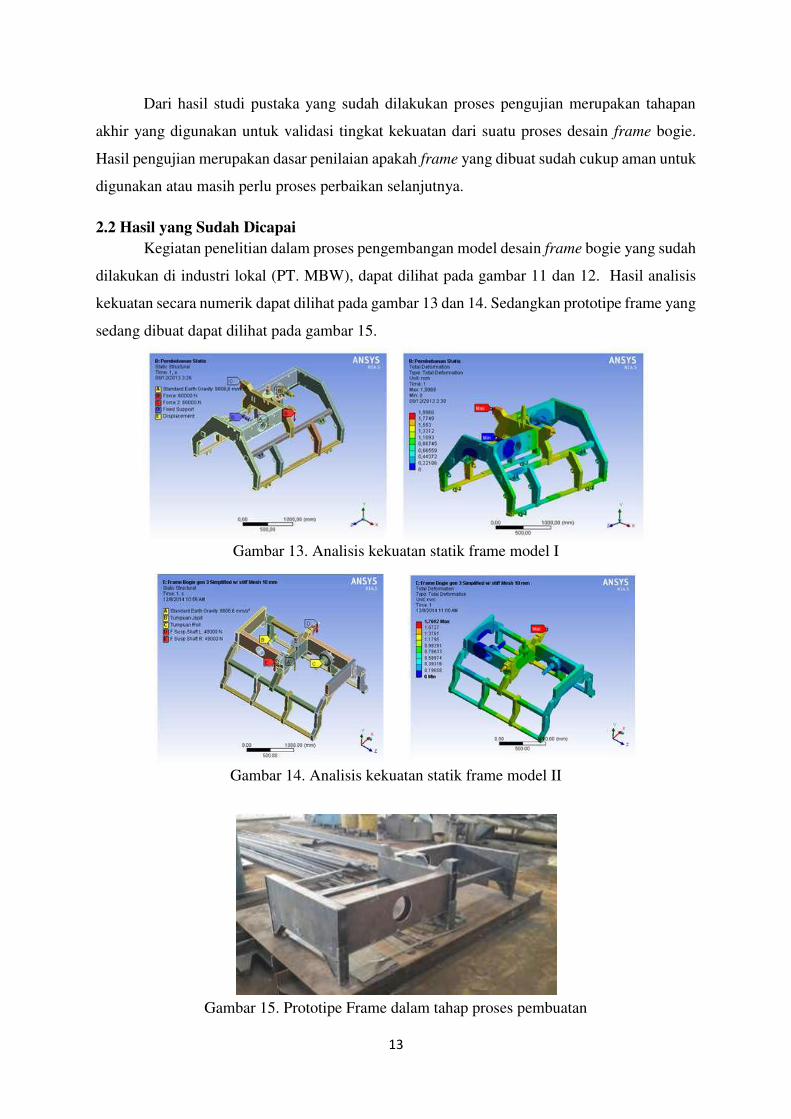
2.2 Hasil yang Sudah Dicapai
Kegiatan penelitian dalam proses pengembangan model desain frame bogie yang sudah
dilakukan di industri lokal (PT. MBW), dapat dilihat pada gambar 11 dan 12. Hasil analisis
kekuatan secara numerik dapat dilihat pada gambar 13 dan 14. Sedangkan prototipe frame yang
sedang dibuat dapat dilihat pada gambar 15.
Gambar 13. Analisis kekuatan statik frame model I
Gambar 14. Analisis kekuatan statik frame model II
Gambar 15. Prototipe Frame dalam tahap proses pembuatan
14
Patent
Patent
Studi dan Analisis Standard
Desain frame Bogie Monorel
Studi dan Analisis Pemilihan
Komponen
Publikasi Ilmiah baik dalam
Jurnal atau Seminar skala
Nasional atau Internasional
Fra
me
Bo
gie
ke
reta
mo
no
rel Pengujian Struktur Frame Bogie
(Uji statik)
Rancang Bangun Prototype
Frame Bogie Kereta Monorel
Pengujian Frame Bogie
Kereta Monorel
Penyusunan Metode dan
Tahapan Pengujian Sesuai dengan
Standard Pengujian
Data Hasil Pengujian Frame Bogie
Kereta Monorel (straddle Type)
Publikasi Ilmiah baik dalam
Jurnal atau Seminar skala
Nasional atau Internasional
Tahun
Kegiatan
Studi Aplikasi Kereta Monorel
Ke
gia
tan
Ris
et Studi Model dan Aplikasi
Kereta Monorel
Studi Standard Desain dan
Aplikasi Kereta Monorel
Parameter Dasar Desain
Kereta Monorel
Desain dan Analisis Model
Komponen Kereta Monorel
(Straddle Type)
Model Bogie Kereta Monorel
(Straddle Type)
Studi Parameter Desain
Kereta Monorel Untuk
Kondisi Dalam Negeri
Desain Model Frame Bogie
Kereta Monorel Untuk
Kondisi Dalam Negeri
Pemodelan CAD Komponen
Kereta Monorel (Straddle Type)
CAE Analysis (static and dynamic) Prototipe Frame Bogie Kereta
Monorel (Starddle Type)
Pendaftaran Patent
Publikasi Ilmiah baik dalam
Jurnal atau Seminar skala
Nasional atau Internasional
Pubikasi Ilmiah (Seminar
Internasional)
Pemodelan CAD
Pemilihan Material dan Proses
Manufaktur
Penyusunan dan Pembuatan
Standard Proses
Pembuatan Prototipe Frame
Bogie Monorel
2013 2014 2015 2016 2011-2012
Rancang Bangun Frame Bogie Kereta Monorel
Produk Nasional
Academic Research Industrial Research Application
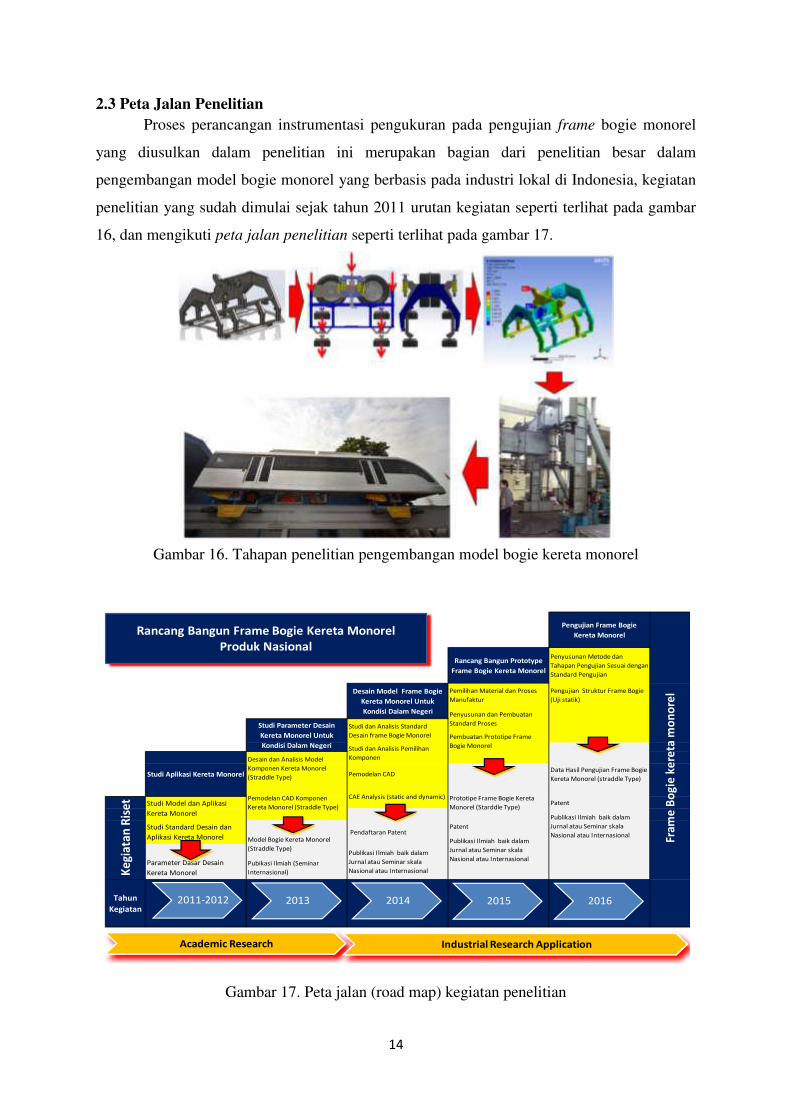
2.3 Peta Jalan Penelitian
Proses perancangan instrumentasi pengukuran pada pengujian frame bogie monorel
yang diusulkan dalam penelitian ini merupakan bagian dari penelitian besar dalam
pengembangan model bogie monorel yang berbasis pada industri lokal di Indonesia, kegiatan
penelitian yang sudah dimulai sejak tahun 2011 urutan kegiatan seperti terlihat pada gambar
16, dan mengikuti peta jalan penelitian seperti terlihat pada gambar 17.
Gambar 16. Tahapan penelitian pengembangan model bogie kereta monorel
Gambar 17. Peta jalan (road map) kegiatan penelitian
15
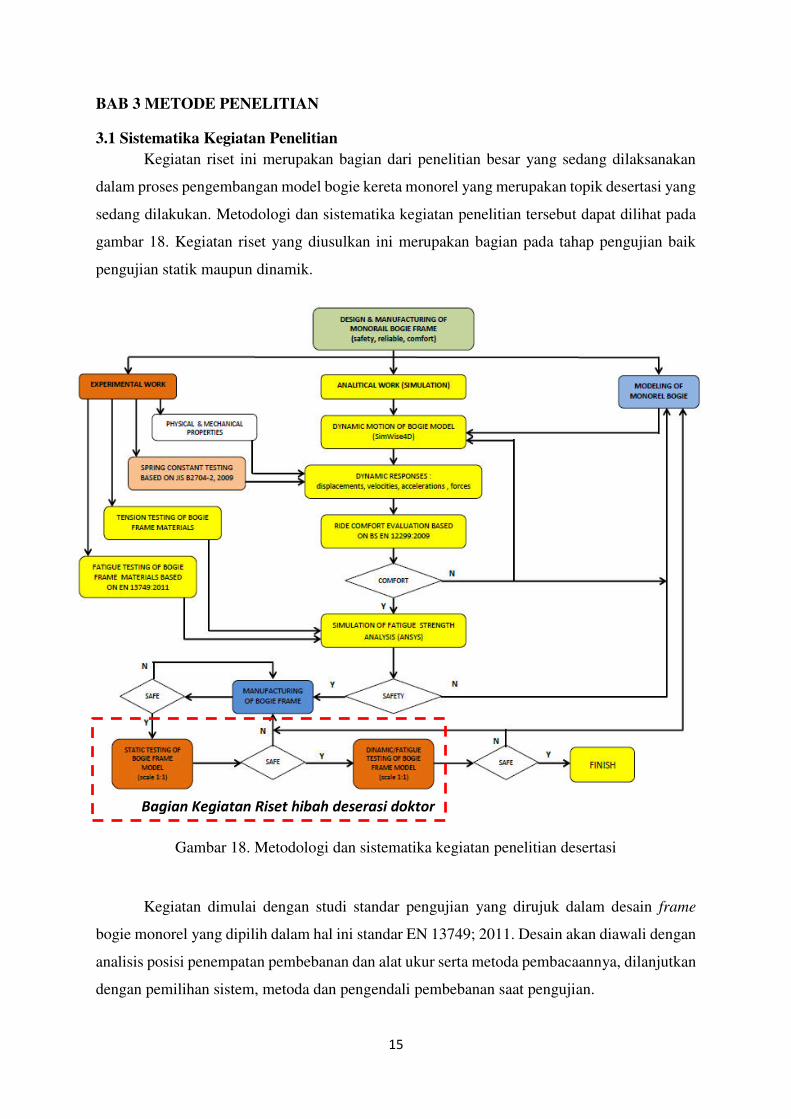
BAB 3 METODE PENELITIAN
3.1 Sistematika Kegiatan Penelitian
Kegiatan riset ini merupakan bagian dari penelitian besar yang sedang dilaksanakan
dalam proses pengembangan model bogie kereta monorel yang merupakan topik desertasi yang
sedang dilakukan. Metodologi dan sistematika kegiatan penelitian tersebut dapat dilihat pada
gambar 18. Kegiatan riset yang diusulkan ini merupakan bagian pada tahap pengujian baik
pengujian statik maupun dinamik.
Gambar 18. Metodologi dan sistematika kegiatan penelitian desertasi
Kegiatan dimulai dengan studi standar pengujian yang dirujuk dalam desain frame
bogie monorel yang dipilih dalam hal ini standar EN 13749; 2011. Desain akan diawali dengan
analisis posisi penempatan pembebanan dan alat ukur serta metoda pembacaannya, dilanjutkan
dengan pemilihan sistem, metoda dan pengendali pembebanan saat pengujian.
Bagian Kegiatan Riset hibah deserasi doktor
16
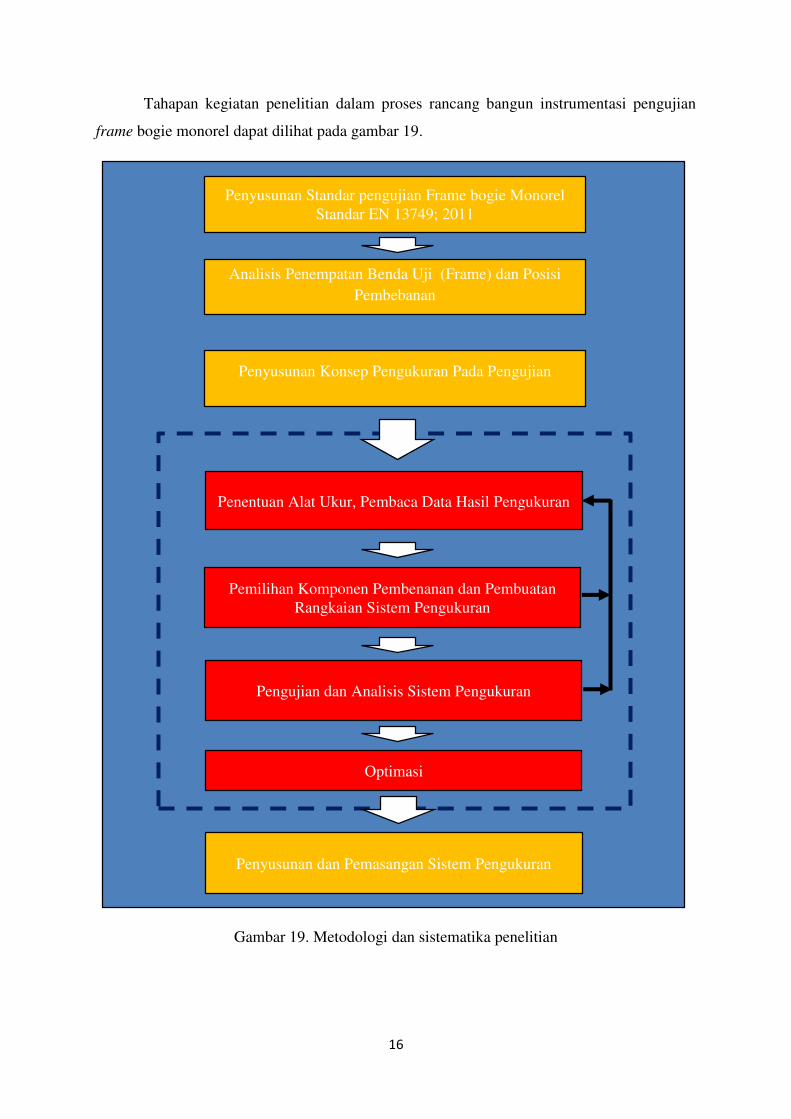
Tahapan kegiatan penelitian dalam proses rancang bangun instrumentasi pengujian
frame bogie monorel dapat dilihat pada gambar 19.
Gambar 19. Metodologi dan sistematika penelitian
Penyusunan Standar pengujian Frame bogie Monorel
Standar EN 13749; 2011
Analisis Penempatan Benda Uji (Frame) dan Posisi
Pembebanan
Penyusunan Konsep Pengukuran Pada Pengujian
Penentuan Alat Ukur, Pembaca Data Hasil Pengukuran
Pemilihan Komponen Pembenanan dan Pembuatan
Rangkaian Sistem Pengukuran
Pengujian dan Analisis Sistem Pengukuran
Optimasi
Penyusunan dan Pemasangan Sistem Pengukuran

17
3.2 Lokasi Penelitian
Penelitian selama ini selain dilaksanakan di Laboratorium Perancangan Mekanikal
Departemen Teknik Mesin Fakultas Teknik Universitas Indonesia juga dilaksanakan di PT.
Melu Bangun Wiweka, yang berlokasi di Cibitung Bekasi dalam proses pembuatan prototipe
frame bogie monorel sedangkan proses pengujian akan dilaksanakan di BBTKS-LUK Serpong.
Untuk mendukung proses pengujian dibutuhkan beberapa peralatan yaitu: rig pemegang alat
uji dan instrmentasi pengukuran saat proses pengujian dilangsungkan.
18
BAB 4 HASIL DAN LUARAN YANG DICAPAI
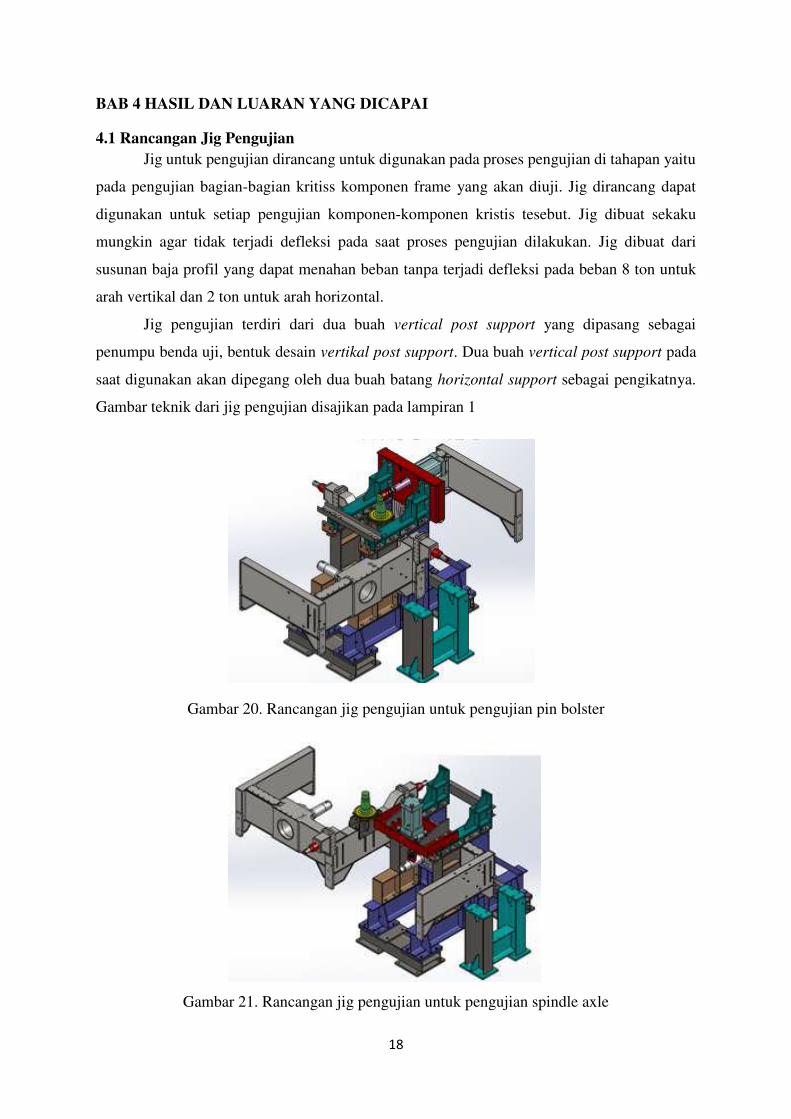
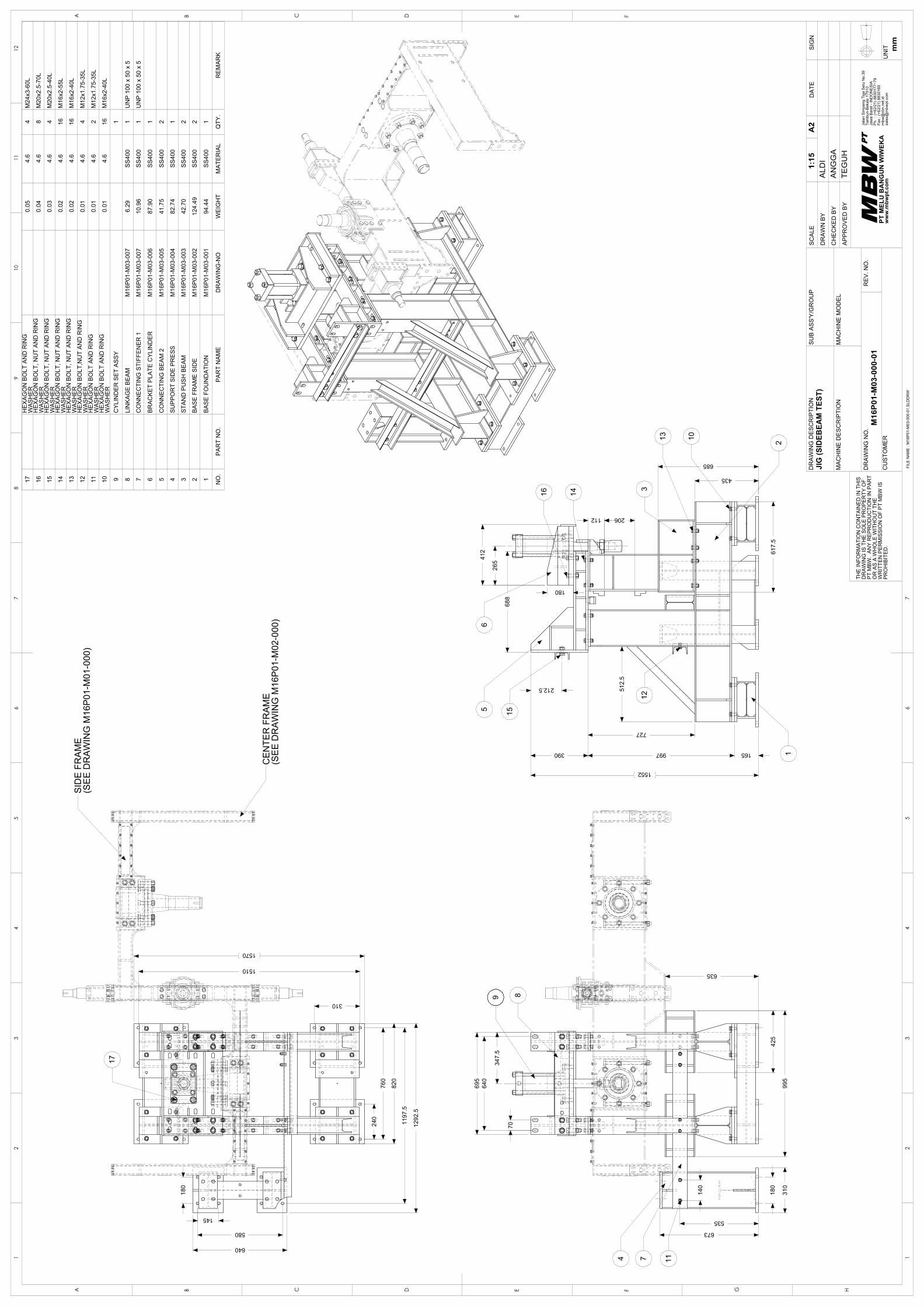
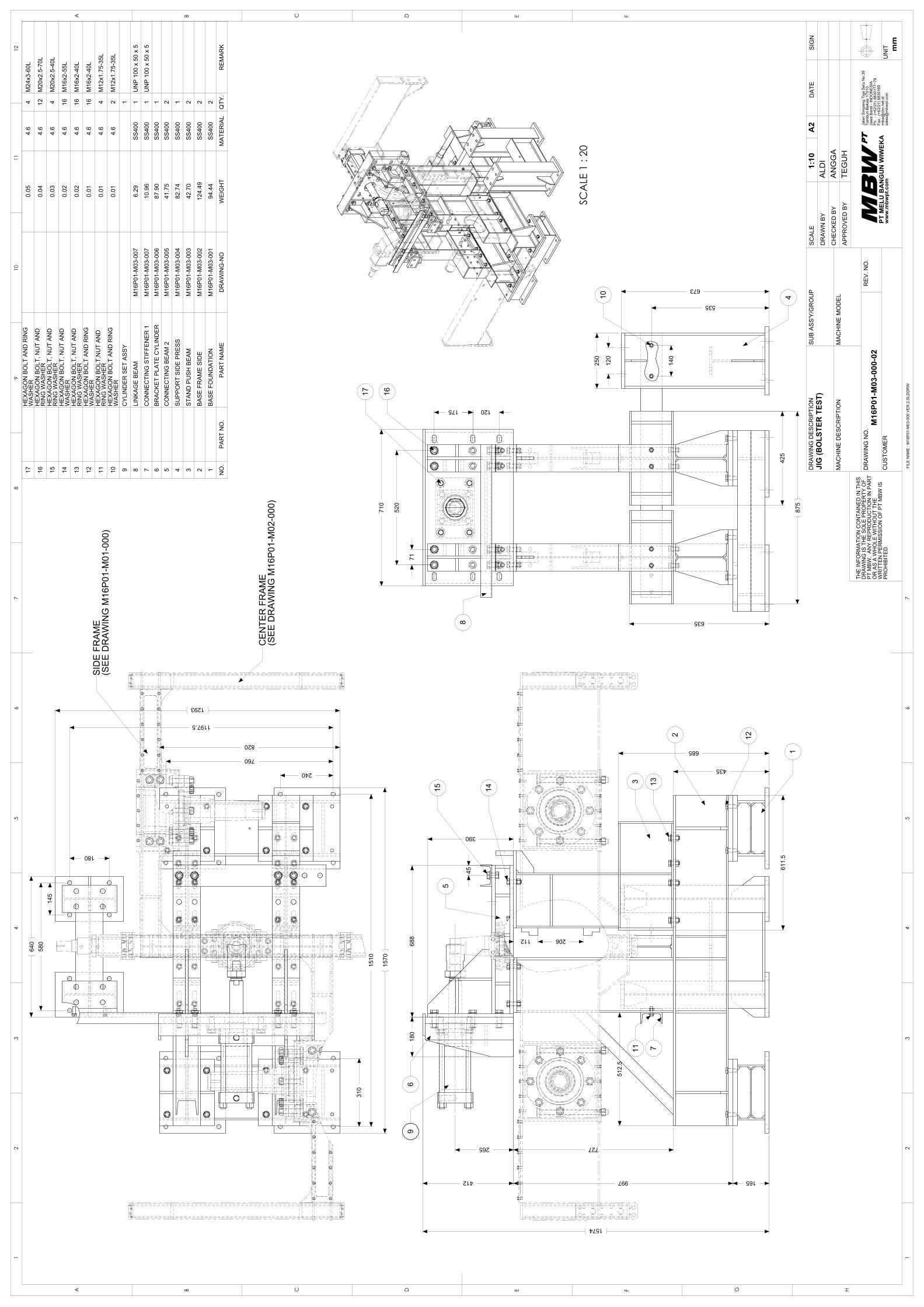
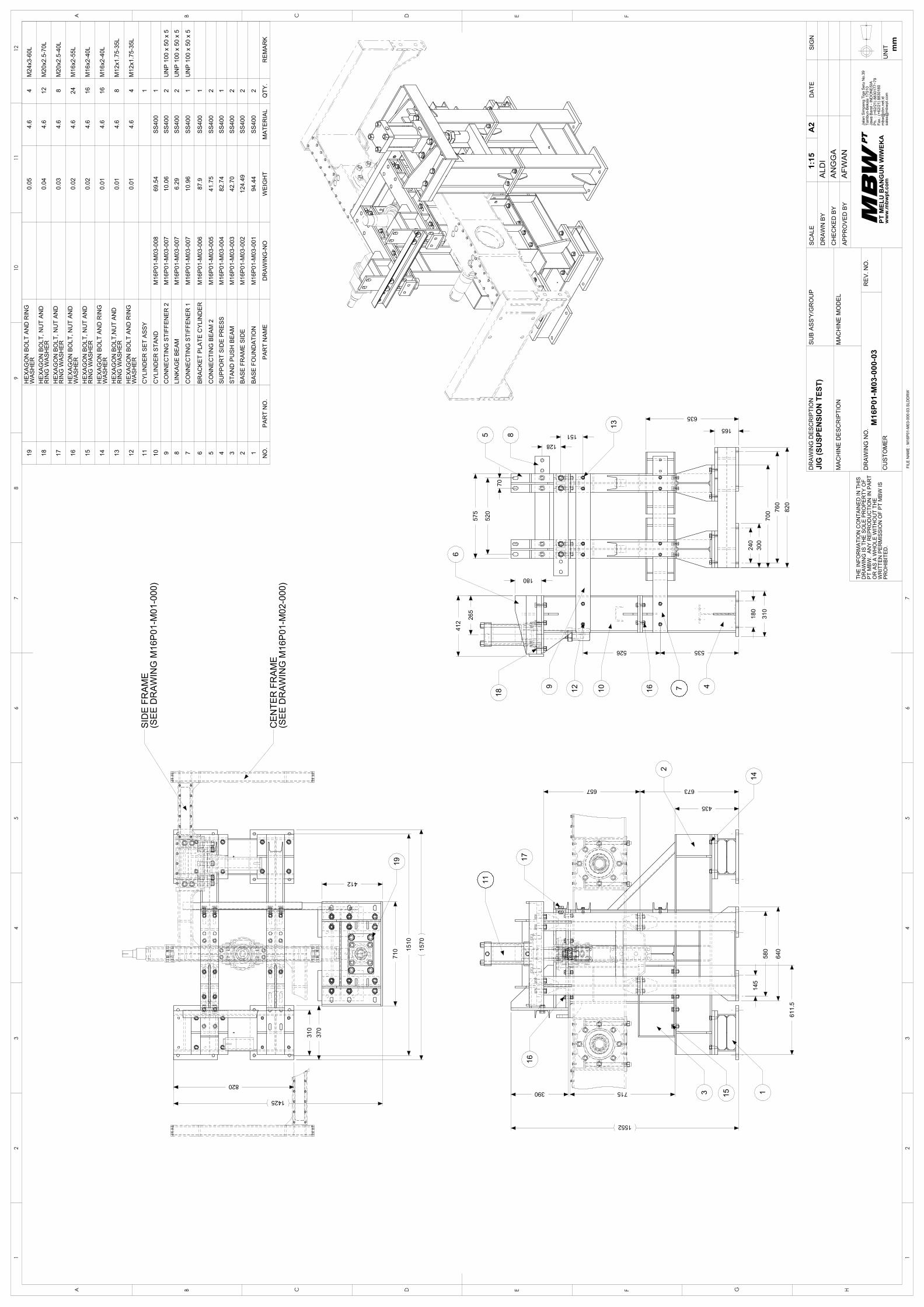
4.1 Rancangan Jig Pengujian
Jig untuk pengujian dirancang untuk digunakan pada proses pengujian di tahapan yaitu
pada pengujian bagian-bagian kritiss komponen frame yang akan diuji. Jig dirancang dapat
digunakan untuk setiap pengujian komponen-komponen kristis tesebut. Jig dibuat sekaku
mungkin agar tidak terjadi defleksi pada saat proses pengujian dilakukan. Jig dibuat dari
susunan baja profil yang dapat menahan beban tanpa terjadi defleksi pada beban 8 ton untuk
arah vertikal dan 2 ton untuk arah horizontal.
Jig pengujian terdiri dari dua buah vertical post support yang dipasang sebagai
penumpu benda uji, bentuk desain vertikal post support. Dua buah vertical post support pada
saat digunakan akan dipegang oleh dua buah batang horizontal support sebagai pengikatnya.
Gambar teknik dari jig pengujian disajikan pada lampiran 1
Gambar 20. Rancangan jig pengujian untuk pengujian pin bolster
Gambar 21. Rancangan jig pengujian untuk pengujian spindle axle
19
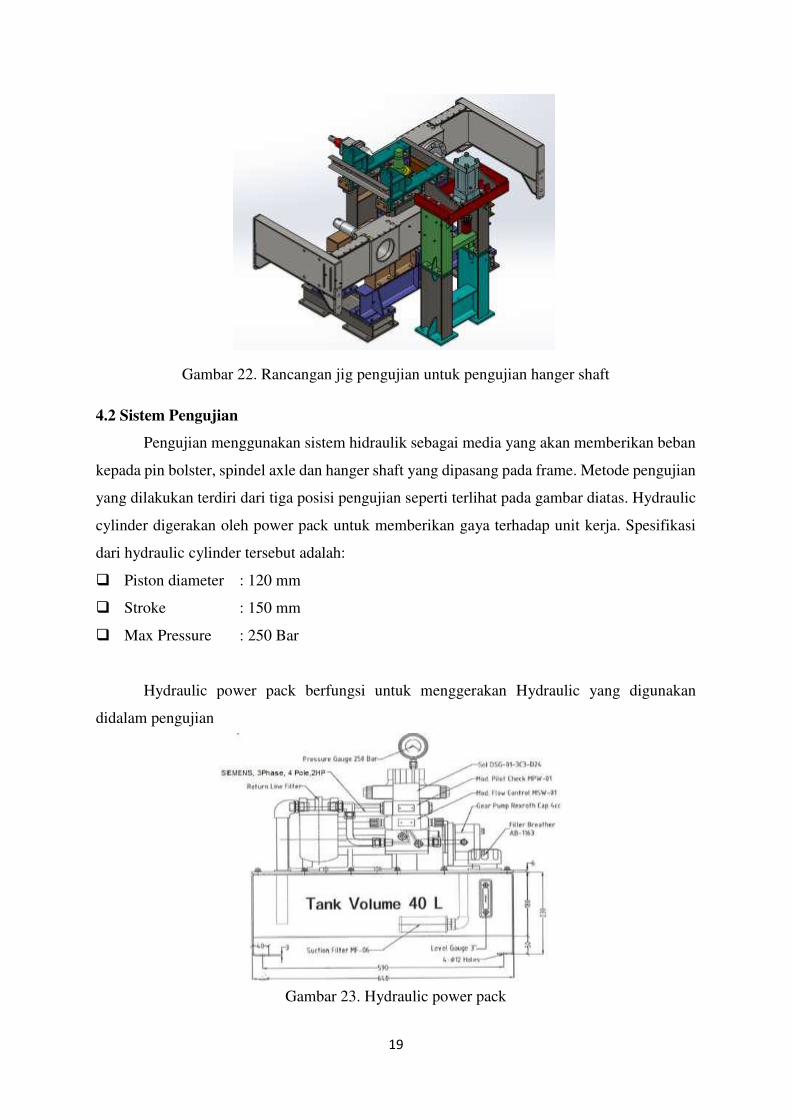
Gambar 22. Rancangan jig pengujian untuk pengujian hanger shaft
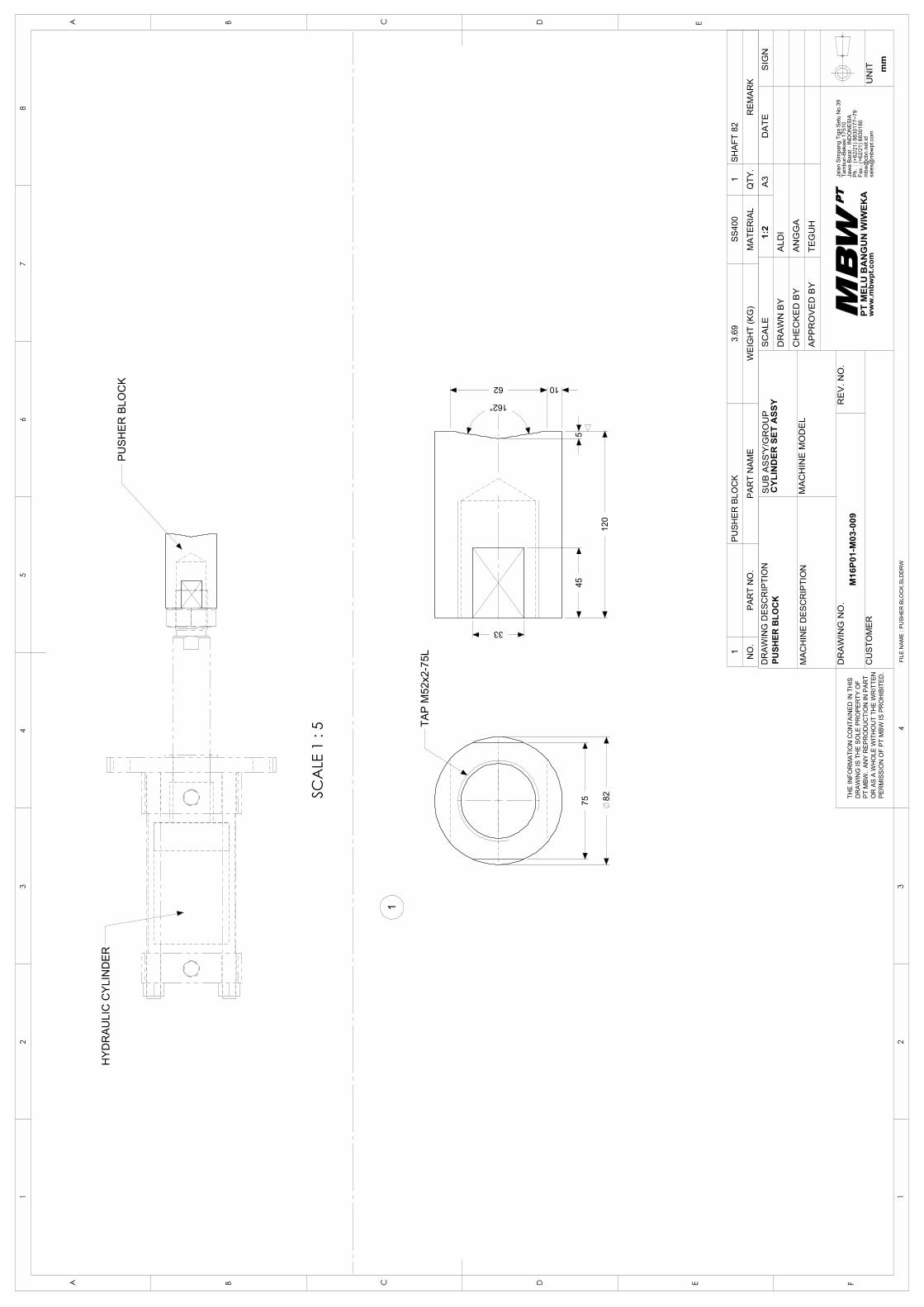
4.2 Sistem Pengujian
Pengujian menggunakan sistem hidraulik sebagai media yang akan memberikan beban
kepada pin bolster, spindel axle dan hanger shaft yang dipasang pada frame. Metode pengujian
yang dilakukan terdiri dari tiga posisi pengujian seperti terlihat pada gambar diatas. Hydraulic
cylinder digerakan oleh power pack untuk memberikan gaya terhadap unit kerja. Spesifikasi
dari hydraulic cylinder tersebut adalah:
Piston diameter : 120 mm
Stroke : 150 mm
Max Pressure : 250 Bar
Hydraulic power pack berfungsi untuk menggerakan Hydraulic yang digunakan
didalam pengujian
Gambar 23. Hydraulic power pack
20
Spesifikasi Hydraulic pack
Daya dorong : 2.9 tons
Daya tarik : 1.4 tons
Tekanan Kerja : 150 bar
Kecepatan dorong maximum : 4.9 cm/s = 8.2 s/stroke
Kecepatan tarik maximum : 10.2 cm/s = 4 s/ stroke
Kapasitas tangki oli : 40 L
Kapasitas pompa : 4 cc
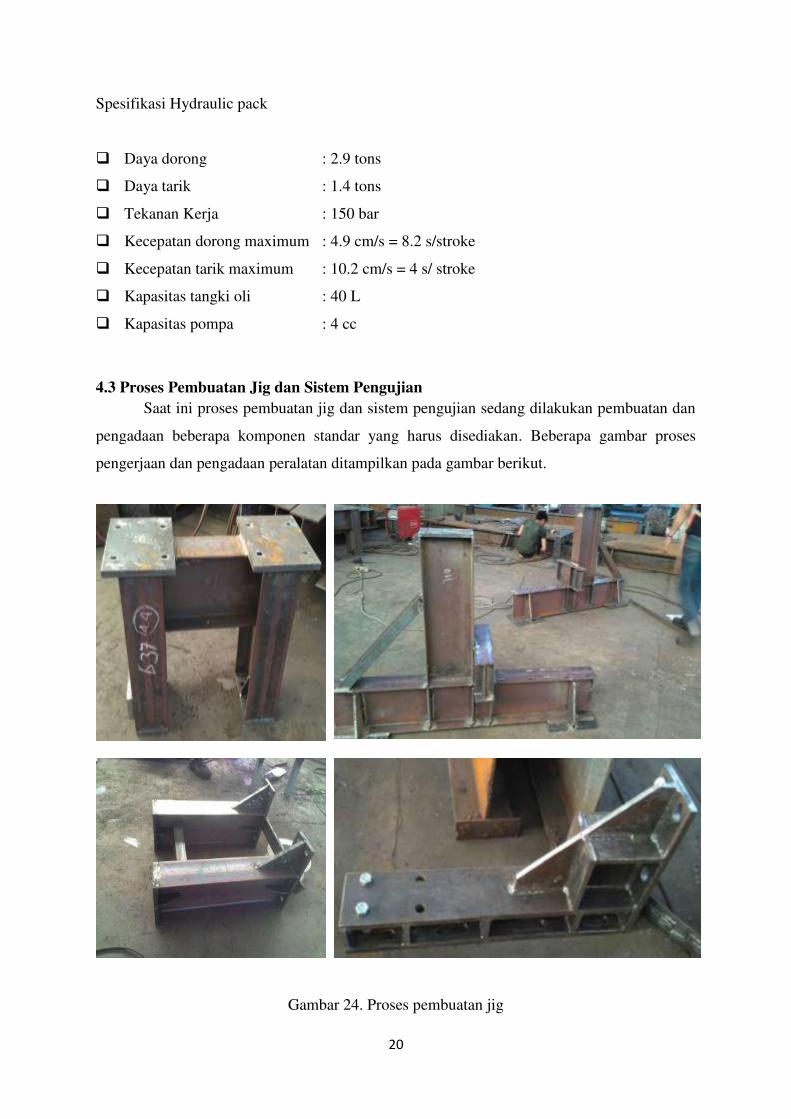
4.3 Proses Pembuatan Jig dan Sistem Pengujian
Saat ini proses pembuatan jig dan sistem pengujian sedang dilakukan pembuatan dan
pengadaan beberapa komponen standar yang harus disediakan. Beberapa gambar proses
pengerjaan dan pengadaan peralatan ditampilkan pada gambar berikut.
Gambar 24. Proses pembuatan jig

21
Hydrolic cylinder dan power pack berikut sistem kontrol yang akan digunakan pengadaannnya
sudah dilakukan, gambar komponen tersebut adalah sebagai berikut
Gambar 25. Hydrolic cylinder dan power pack
Gambar 26. Electic control for hydrolic cylinder and power pack
22
BAB 5 KESIMPULAN DAN SARAN
5.1 Kesimpulan
Dari kegiatan penelitian rancang bangun rig untuk pengujian frame bogie monorel
dapat ditarik kesimpulan sementara sebagai berikut.
Rig pengujian dapat dibuat dengan menngunakan 2 (dua) unit vertical post support
yang diikat dengan menggunakan 2 (dua) buah horizontal support.
Desain vertical post support dibuat sederhana yang dibentuk dari susunan baja profil
yang banyak didapat di pasaran dalam negeri.
Material yang digunakan untuk vertical post support dan horizontal support
menggunakan SS400
Dari hasil simulasi diperoleh defleksi maksimum yang terjadi masih dibawah 1 (satu)
mm, hal ini menunjukan bahwa vertical post support yang dirancang cukup kaku untuk
digunakan dalam pengujian frame bogie monorel.
5.2 Saran
Saran yang dipandang perlu untuk proses perbaikan hasil penelitian adalah perlu
dilakukan proses pengujian dinamik sehingga komponen yang diuji dapat terdefinisi umur
fatiknya.
23
DAFTAR PUSTAKA
[1] Zulkifli Aboebakar, 2007, “Tantangan dan Peluang Monorel Sebagai Program
Pengembangan Pola Transportasai Makro (PTM) DKI Jakarta”, Lex Jurnalica Vol. 5
No. 1 Desember 2007.
[2] Joewono, “The Characteristics of Paratransit and Non-Motorized Transport in
Bandung, Indonesia” Journal of the Eastern Asia Society for Transportation Studies,
Vol. 6, pp. 262 - 277, 2005
[3] Edward H. Anson, “Monorail System for Mass Rapid Transit”, Gibb & Hill, Inc.
Consulting Engineer, New-York, April 1954
[4] Hermann,”The Feasibility of Monorail”, Master Theses Civil Engineering Department
at Massachusetts Institute of Technology, September 1959 .
[5] Kementrian Perhubungan RI, “Rencana Induk Perkeretaapian Nasional”, Direktorat
Jenderal Perketaapian, April 2011.
[6] Danardono AS et all, “The Development of Monorail Design Based on Local Industrial
Component as an Alternative Implementation Concept of MRT (Mass Rapid Transit)
for the Growth of Indonesian Sustainable Transportation System” Proceeding
International Seminar Quality in Research, 2013
[7] Danardono AS et all, “Preliminary Analysis in the Improvement Turning Abilities in
Design of the Monorail Bogie PT. MBW Indonesia” Applied Mechanics and Materials
(Volume 663) October 2014 page 539-543
[8] Gatot prayogo, dkk, “Perancangan dan Pengembangan Bogie Monorel : Analisa
Respon Dinamik dan Tingkat Kenyamanan” Proceeding Seminar Nasional Tahunan
Teknik Mesin XIII (SNTTM XIII) 2014, Universitas Indonesia, Depok
[9] EN 13749:2011: “Railway applications - Wheelsets and bogies - Method of specifying
the structural requirements of bogie frames”, CEN Brussels; 2011
[10] R.K. Luo, “Dynamics stress analysis of an open-shaped railway bogie frame”,
Engineering Failure Analysis, Vol. 3, No. 1, pp. 53-64, 1996
[11] J. Schijve, “Fatigue of structures and materials in the 20th century and the state of the
art”, International Journal of Fatigue 25 (2003) 679–702
[12] R. A. Smith, “Railway fatigue failures: an overview of a long standing problem”, Mat.-
wiss. u. Werkstofftech. 2005, 36, No. 11
[13] Jung-Seok Kim, “Fatigue assessment of tilting bogie frame for Korean tilting train:
Analysis and static tests”, Engineering Failure Analysis 13 (2006) 1326–1337
[14] C.M. Sonsino, “Course of SN-curves especially in the high-cycle fatigue regime with
regard to component design and safety”, International Journal of Fatigue 29 (2007)
2246–2258
[15] M. Kassner, “Fatigue strength analysis of a welded railway vehicle structure by
different methods”, International Journal of Fatigue 34 (2012) 103–111
[16] D Radaj, “Fatigue assessment of welded joints by local approaches”, Second edition
2006,Woodhead Publishing Limited and CRC Press LLC
[17] A Hobbacher, “Fatigue design of welded joints and components - Recommendations of
IIW Joint Working Group XIII-XV”, First published 1996, Abington Publishing
[18] A. Esderts, “Fatigue strength analysis of welded joints in closed steel sections in rail
vehicles”, International Journal of Fatigue 34 (2012) 112–121
[19] Jeong-Woo Han, “Fatigue strength evaluation of a bogie frame for urban maglev
train with fatigue test on full-scale test rig”, Engineering Failure Analysis 31 (2013)
412–420

2
LAMPIRAN
PT
ME
LU B
AN
GU
N W
IWE
KA
ww
w.m
bwpt
.com
310
425
995
635
180
140
535
673
695
6
40
70
347
.5
8
4 117
9
820
760
2
40
129
2.5
640
580
145
180
310
1510
1570
119
7.5
17
CE
NTE
R F
RA
ME
(SE
E D
RA
WIN
G M
16P
01-M
02-0
00)
SID
E F
RA
ME
(SE
E D
RA
WIN
G M
16P
01-M
01-0
00)
390
212.5
727
512
.5
997 165
1552
206
435
685
617
.5
265
412
180
112
688
15
12
1
5
16
6
14
3
21013
NO
.P
AR
T N
O.
PA
RT
NA
ME
DR
AW
ING
-NO
WE
IGH
TM
ATE
RIA
LQ
TY.
RE
MA
RK
17H
EX
AG
ON
BO
LT A
ND
RIN
G
WA
SH
ER
0.05
4.6
4M
24x3
-60L
16H
EX
AG
ON
BO
LT, N
UT
AN
D R
ING
W
AS
HE
R0.
044.
68
M20
x2.5
-70L
15H
EX
AG
ON
BO
LT, N
UT
AN
D R
ING
W
AS
HE
R0.
034.
64
M20
x2.5
-40L
14H
EX
AG
ON
BO
LT, N
UT
AN
D R
ING
W
AS
HE
R0.
024.
616
M16
x2-5
5L
13H
EX
AG
ON
BO
LT, N
UT
AN
D R
ING
W
AS
HE
R0.
024.
616
M16
x2-4
0L
12H
EX
AG
ON
BO
LT,N
UT
AN
D R
ING
W
AS
HE
R0.
014.
64
M12
x1.7
5-35
L
11H
EX
AG
ON
BO
LT A
ND
RIN
G
WA
SH
ER
0.01
4.6
2M
12x1
.75-
35L
10H
EX
AG
ON
BO
LT A
ND
RIN
G
WA
SH
ER
0.01
4.6
16M
16x2
-40L
9C
YLI
ND
ER
SE
T A
SS
Y1
8LI
NK
AG
E B
EA
MM
16P
01-M
03-0
076.
29S
S40
01
UN
P 1
00 x
50
x 5
7C
ON
NE
CTI
NG
STI
FFE
NE
R 1
M16
P01
-M03
-007
10.9
6S
S40
01
UN
P 1
00 x
50
x 5
6B
RA
CK
ET
PLA
TE C
YLI
ND
ER
M16
P01
-M03
-006
87.9
0S
S40
01
5C
ON
NE
CTI
NG
BE
AM
2M
16P
01-M
03-0
0541
.75
SS
400
2
4S
UP
PO
RT
SID
E P
RE
SS
M16
P01
-M03
-004
82.7
4S
S40
01
3S
TAN
D P
US
H B
EA
MM
16P
01-M
03-0
0342
.70
SS
400
2
2B
AS
E F
RA
ME
SID
EM
16P
01-M
03-0
0212
4.49
SS
400
2
1B
AS
E F
OU
ND
ATI
ON
M16
P01
-M03
-001
94.4
4S
S40
01
6
DCBA E F G H
EA B C D F
54
32
17
89
1011
12
12
34
56
7FI
LE N
AM
E :
M16
P01
-M03
-000
-01.
SLD
DR
W
A2 Ja
lan
Sim
pang
Tig
a S
etu
No.
39Ta
mbu
n-B
ekas
i 175
10Ja
wa
Bar
at -
IND
ON
ES
IAP
h. :
(+62
/21)
883
0177
~79
Fax.
: (+6
2/21
) 883
0180
mbw
@cb
n.ne
t.id
sale
s@m
bwpt
.com
mm
UN
IT
THE
INFO
RM
ATIO
N C
ON
TAIN
ED IN
TH
ISD
RAW
ING
IS T
HE
SOLE
PR
OPE
RTY
OF
PT M
BW.
ANY
REP
RO
DU
CTI
ON
IN P
ART
OR
AS
A W
HO
LE W
ITH
OU
T TH
E W
RIT
TEN
PER
MIS
SIO
N O
F PT
MBW
IS
PRO
HIB
ITED
.
DR
AW
ING
NO
.
CU
STO
ME
R
SU
B A
SS
'Y/G
RO
UP
DR
AW
ING
DE
SC
RIP
TIO
N
RE
V. N
O.
MA
CH
INE
MO
DE
L
M16
P01
-M03
-000
-01
MA
CH
INE
DE
SC
RIP
TIO
N
SIG
ND
ATE
AN
GG
A
1:15
ALD
I
TEG
UH
DR
AW
N B
Y
SC
ALE
AP
PR
OV
ED
BY
CH
EC
KE
D B
Y
JIG
(SID
EBEA
M T
EST)
PT
ME
LU B
AN
GU
N W
IWE
KA
ww
w.m
bwpt
.com
611
.5
727 265
412 997 165
112 206
512
.5
180
435
685
390
688
1574
45
3
1
7
2
5
12
13
11
1415
96
1293
820
240
760
157
0
310
151
0
1197.5
580
1
45
640
180
SID
E F
RA
ME
(SE
E D
RA
WIN
G M
16P
01-M
01-0
00)
CE
NTE
R F
RA
ME
(SE
E D
RA
WIN
G M
16P
01-M
02-0
00)
635
875
425
673
535
140
250
120
71
520
175 120
710
4
8
1617
10
SCA
LE 1
: 20
NO
.P
AR
T N
O.
PA
RT
NA
ME
DR
AW
ING
-NO
WE
IGH
TM
ATE
RIA
LQ
TY.
RE
MA
RK
17H
EX
AG
ON
BO
LT A
ND
RIN
G
WA
SH
ER
0.05
4.6
4M
24x3
-60L
16H
EX
AG
ON
BO
LT, N
UT
AN
D
RIN
G W
AS
HE
R0.
044.
612
M20
x2.5
-70L
15H
EX
AG
ON
BO
LT, N
UT
AN
D
RIN
G W
AS
HE
R0.
034.
64
M20
x2.5
-40L
14H
EX
AG
ON
BO
LT, N
UT
AN
D
WA
SH
ER
0.02
4.6
16M
16x2
-55L
13H
EX
AG
ON
BO
LT, N
UT
AN
D
RIN
G W
AS
HE
R0.
024.
616
M16
x2-4
0L
12H
EX
AG
ON
BO
LT A
ND
RIN
G
WA
SH
ER
0.01
4.6
16M
16x2
-40L
11H
EX
AG
ON
BO
LT,N
UT
AN
D
RIN
G W
AS
HE
R0.
014.
64
M12
x1.7
5-35
L
10H
EX
AG
ON
BO
LT A
ND
RIN
G
WA
SH
ER
0.01
4.6
2M
12x1
.75-
35L
9C
YLI
ND
ER
SE
T A
SS
Y1
8LI
NK
AG
E B
EA
MM
16P
01-M
03-0
076.
29S
S40
01
UN
P 1
00 x
50
x 5
7C
ON
NE
CTI
NG
STI
FFE
NE
R 1
M16
P01
-M03
-007
10.9
6S
S40
01
UN
P 1
00 x
50
x 5
6B
RA
CK
ET
PLA
TE C
YLI
ND
ER
M16
P01
-M03
-006
87.9
0S
S40
01
5C
ON
NE
CTI
NG
BE
AM
2M
16P
01-M
03-0
0541
.75
SS
400
2
4S
UP
PO
RT
SID
E P
RE
SS
M16
P01
-M03
-004
82.7
4S
S40
01
3S
TAN
D P
US
H B
EA
MM
16P
01-M
03-0
0342
.70
SS
400
2
2B
AS
E F
RA
ME
SID
EM
16P
01-M
03-0
0212
4.49
SS
400
2
1B
AS
E F
OU
ND
ATI
ON
M16
P01
-M03
-001
94.4
4S
S40
02
6
DCBA E F G H
EA B C D F
54
32
17
89
1011
12
12
34
56
7FI
LE N
AM
E :
M16
P01
-M03
-000
VE
R 2
.SLD
DR
W
A2 Ja
lan
Sim
pang
Tig
a S
etu
No.
39Ta
mbu
n-B
ekas
i 175
10Ja
wa
Bar
at -
IND
ON
ES
IAP
h. :
(+62
/21)
883
0177
~79
Fax.
: (+6
2/21
) 883
0180
mbw
@cb
n.ne
t.id
sale
s@m
bwpt
.com
mm
UN
IT
THE
INFO
RM
ATIO
N C
ON
TAIN
ED IN
TH
ISD
RAW
ING
IS T
HE
SOLE
PR
OPE
RTY
OF
PT M
BW.
ANY
REP
RO
DU
CTI
ON
IN P
ART
OR
AS
A W
HO
LE W
ITH
OU
T TH
E W
RIT
TEN
PER
MIS
SIO
N O
F PT
MBW
IS
PRO
HIB
ITED
.
DR
AW
ING
NO
.
CU
STO
ME
R
SU
B A
SS
'Y/G
RO
UP
DR
AW
ING
DE
SC
RIP
TIO
N
RE
V. N
O.
MA
CH
INE
MO
DE
L
M16
P01
-M03
-000
-02
MA
CH
INE
DE
SC
RIP
TIO
N
SIG
ND
ATE
AN
GG
A
1:10
ALD
I
TEG
UH
DR
AW
N B
Y
SC
ALE
AP
PR
OV
ED
BY
CH
EC
KE
D B
Y
JIG
(BO
LSTE
R T
EST)
PT
ME
LU B
AN
GU
N W
IWE
KA
ww
w.m
bwpt
.com
640
580
145
435
673 657
715
1552
390
611
.5
1
2
3
11
14
15
1617
310
157
0
151
0
370
820
1425
412
710
19
SID
E F
RA
ME
(SE
E D
RA
WIN
G M
16P
01-M
01-0
00)
CE
NTE
R F
RA
ME
(SE
E D
RA
WIN
G M
16P
01-M
02-0
00)
310
180
535
180
70
520
575
635
165
300
2
40
820
7
60
412
265
526
151 128
700
410
6
8
9 712
13
18 16
5
NO
.P
AR
T N
O.
PA
RT
NA
ME
DR
AW
ING
-NO
WE
IGH
TM
ATE
RIA
LQ
TY.
RE
MA
RK
19H
EX
AG
ON
BO
LT A
ND
RIN
G
WA
SH
ER
0.05
4.6
4M
24x3
-60L
18H
EX
AG
ON
BO
LT, N
UT
AN
D
RIN
G W
AS
HE
R0.
044.
612
M20
x2.5
-70L
17H
EX
AG
ON
BO
LT, N
UT
AN
D
RIN
G W
AS
HE
R0.
034.
68
M20
x2.5
-40L
16H
EX
AG
ON
BO
LT, N
UT
AN
D
WA
SH
ER
0.02
4.6
24M
16x2
-55L
15H
EX
AG
ON
BO
LT, N
UT
AN
D
RIN
G W
AS
HE
R0.
024.
616
M16
x2-4
0L
14H
EX
AG
ON
BO
LT A
ND
RIN
G
WA
SH
ER
0.01
4.6
16M
16x2
-40L
13H
EX
AG
ON
BO
LT,N
UT
AN
D
RIN
G W
AS
HE
R0.
014.
68
M12
x1.7
5-35
L
12H
EX
AG
ON
BO
LT A
ND
RIN
G
WA
SH
ER
0.01
4.6
4M
12x1
.75-
35L
11C
YLI
ND
ER
SE
T A
SS
Y1
10C
YLI
ND
ER
STA
ND
M16
P01
-M03
-008
69.5
4S
S40
01
9C
ON
NE
CTI
NG
STI
FFE
NE
R 2
M16
P01
-M03
-007
10.0
6S
S40
02
UN
P 1
00 x
50
x 5
8LI
NK
AG
E B
EA
MM
16P
01-M
03-0
076.
29S
S40
02
UN
P 1
00 x
50
x 5
7C
ON
NE
CTI
NG
STI
FFE
NE
R 1
M16
P01
-M03
-007
10.9
6S
S40
01
UN
P 1
00 x
50
x 5
6B
RA
CK
ET
PLA
TE C
YLI
ND
ER
M16
P01
-M03
-006
87.9
SS
400
1
5C
ON
NE
CTI
NG
BE
AM
2M
16P
01-M
03-0
0541
.75
SS
400
2
4S
UP
PO
RT
SID
E P
RE
SS
M16
P01
-M03
-004
82.7
4S
S40
01
3S
TAN
D P
US
H B
EA
MM
16P
01-M
03-0
0342
.70
SS
400
2
2B
AS
E F
RA
ME
SID
EM
16P
01-M
03-0
0212
4.49
SS
400
2
1B
AS
E F
OU
ND
ATI
ON
M16
P01
-M03
-001
94.4
4S
S40
02
6
DCBA E F G H
EA B C D F
54
32
17
89
1011
12
12
34
56
7FI
LE N
AM
E :
M16
P01
-M03
-000
-03.
SLD
DR
W
A2 Ja
lan
Sim
pang
Tig
a S
etu
No.
39Ta
mbu
n-B
ekas
i 175
10Ja
wa
Bar
at -
IND
ON
ES
IAP
h. :
(+62
/21)
883
0177
~79
Fax.
: (+6
2/21
) 883
0180
mbw
@cb
n.ne
t.id
sale
s@m
bwpt
.com
mm
UN
IT
THE
INFO
RM
ATIO
N C
ON
TAIN
ED IN
TH
ISD
RAW
ING
IS T
HE
SOLE
PR
OPE
RTY
OF
PT M
BW.
ANY
REP
RO
DU
CTI
ON
IN P
ART
OR
AS
A W
HO
LE W
ITH
OU
T TH
E W
RIT
TEN
PER
MIS
SIO
N O
F PT
MBW
IS
PRO
HIB
ITED
.
DR
AW
ING
NO
.
CU
STO
ME
R
SU
B A
SS
'Y/G
RO
UP
DR
AW
ING
DE
SC
RIP
TIO
N
RE
V. N
O.
MA
CH
INE
MO
DE
L
M16
P01
-M03
-000
-03
MA
CH
INE
DE
SC
RIP
TIO
N
SIG
ND
ATE
AN
GG
A
1:15
ALD
I
AFW
AN
DR
AW
N B
Y
SC
ALE
AP
PR
OV
ED
BY
CH
EC
KE
D B
Y
JIG
(SU
SPEN
SIO
N T
EST)
PT
ME
LU B
AN
GU
N W
IWE
KA
ww
w.m
bwpt
.com
560
70
505
166
16
125
580
20
10.1
10.4
10.7
5TY
P
5TY
P
TYP
250
125
120
70
4 x
18 T
HR
U10
.2
QTY
= 2
PC
S
16
640
125
10.1
H 2
50 x
125
x 2
9
250
430
50
10.4
UN
P 1
00 x
50
x 5
100
250
100
140
50
2 x
TAP
M12
x1.7
5
125
10.3
QTY
= 1
PC
S
QTY
= 1
PC
S
20
390
125
65
1
20
175
6 x
22
THR
U
70
10.7
16
190
140
10
.5
QTY
= 2
PC
S
QTY
= 2
PC
S
16
50
30
20
100
SCA
LE 1
: 2
10.6
QTY
= 8
PC
S
9
70
505
175 120
390
65
388
438
100
140
250
120
9
16
206
16
100
672
129
.5
9 1
29.5
QTY
= 1
PC
S
10.5
10.7
10.2
10.3
5TY
P
5TY
P
5TY
P
QTY
= 2
PC
S
NO
TE :
SE
MU
A P
EN
GE
LAS
AN
ME
NG
GU
NA
KA
N G
MA
W
NO
.P
AR
T N
O.
PA
RT
NA
ME
WE
IGH
T (K
G)
MA
TER
IAL
QTY
.R
EM
AR
K
10.7
UP
PE
R P
LATE
5.84
SS
400
2P
L 16
10.6
STI
FFE
NE
R 2
0.28
SS
400
8P
L 9
10.5
STI
FFE
NE
R 1
1.67
SS
400
2P
L 16
10.4
CO
NN
EC
TIN
G B
OD
Y4.
01S
S40
01
UN
P 1
00 x
50
x 5
10.3
CO
NN
EC
TIN
G P
LATE
3.90
SS
400
1P
L 20
10.2
BA
SE
STA
ND
3.80
SS
400
2P
L 16
10.1
STA
ND
BO
DY
18.2
2S
S40
02
H 2
50 x
125
x 2
9
10C
YLI
ND
ER
STA
ND
69.5
4S
S40
01
6
DCBA E F G H
EA B C D F
54
32
17
89
1011
12
12
34
56
7FI
LE N
AM
E :
CY
LIN
DE
R S
TAN
D.S
LDD
RW
A2 Ja
lan
Sim
pang
Tig
a S
etu
No.
39Ta
mbu
n-B
ekas
i 175
10Ja
wa
Bar
at -
IND
ON
ES
IAP
h. :
(+62
/21)
883
0177
~79
Fax.
: (+6
2/21
) 883
0180
mbw
@cb
n.ne
t.id
sale
s@m
bwpt
.com
mm
UN
IT
THE
INFO
RM
ATIO
N C
ON
TAIN
ED IN
TH
ISD
RAW
ING
IS T
HE
SOLE
PR
OPE
RTY
OF
PT M
BW.
ANY
REP
RO
DU
CTI
ON
IN P
ART
OR
AS
A W
HO
LE W
ITH
OU
T TH
E W
RIT
TEN
PER
MIS
SIO
N O
F PT
MBW
IS
PRO
HIB
ITED
.
DR
AW
ING
NO
.
CU
STO
ME
R
SU
B A
SS
'Y/G
RO
UP
DR
AW
ING
DE
SC
RIP
TIO
N
RE
V. N
O.
MA
CH
INE
MO
DE
L
M16
P01
-M03
-008
MA
CH
INE
DE
SC
RIP
TIO
N
SIG
ND
ATE
AN
GG
A
1:5
ALD
I
TEG
UH
DR
AW
N B
Y
SC
ALE
AP
PR
OV
ED
BY
CH
EC
KE
D B
Y
CYL
IND
ER S
TAN
DJI
G A
SS
Y
PT
ME
LU B
AN
GU
N W
IWE
KA
ww
w.m
bwpt
.com
120
45
33
162°
62
5
10
82
75
TAP
M52
x2-7
5L
1
SCA
LE 1
: 5
HY
DR
AU
LIC
CY
LIN
DE
RP
US
HE
R B
LOC
K
NO
.P
AR
T N
O.
PA
RT
NA
ME
WE
IGH
T (K
G)
MA
TER
IAL
QTY
.R
EM
AR
K
1P
US
HE
R B
LOC
K3.
69S
S40
01
SH
AFT
82
D E FC
12
3
BA
32
15
C D
46
78
A B
4
E
PUSH
ER B
LOC
K
CH
EC
KE
D B
Y
AP
PR
OV
ED
BY
SC
ALE
DR
AW
N B
Y
TEG
UH
ALD
I1:2
AN
GG
A
DA
TES
IGN
MA
CH
INE
DE
SC
RIP
TIO
N
M16
P01
-M03
-009
MA
CH
INE
MO
DE
L
RE
V. N
O.
DR
AW
ING
DE
SC
RIP
TIO
N
CU
STO
ME
R
DR
AW
ING
NO
.TH
E IN
FOR
MAT
ION
CO
NTA
INED
IN T
HIS
DR
AWIN
G IS
TH
E SO
LE P
RO
PER
TY O
FPT
MBW
. AN
Y R
EPR
OD
UC
TIO
N IN
PAR
T O
R A
S A
WH
OLE
WIT
HO
UT
THE
WR
ITTE
N
PER
MIS
SIO
N O
F PT
MBW
IS P
RO
HIB
ITED
.
UN
IT mm
Jala
n S
impa
ng T
iga
Set
u N
o.39
Tam
bun-
Bek
asi 1
7510
Jaw
a B
arat
- IN
DO
NE
SIA
Ph.
: (+
62/2
1) 8
8301
77~7
9Fa
x.: (
+62/
21) 8
8301
80m
bw@
cbn.
net.i
dsa
les@
mbw
pt.c
om
A3
FILE
NA
ME
: P
US
HE
R B
LOC
K.S
LDD
RW
SU
B A
SS
'Y/G
RO
UP
CY
LIN
DE
R S
ET
AS
SY
PT M
ELU
BA
NG
UN
WIW
EKA
ww
w.m
bwpt
.com
55
1200
987
.5
445 435 320
392
231
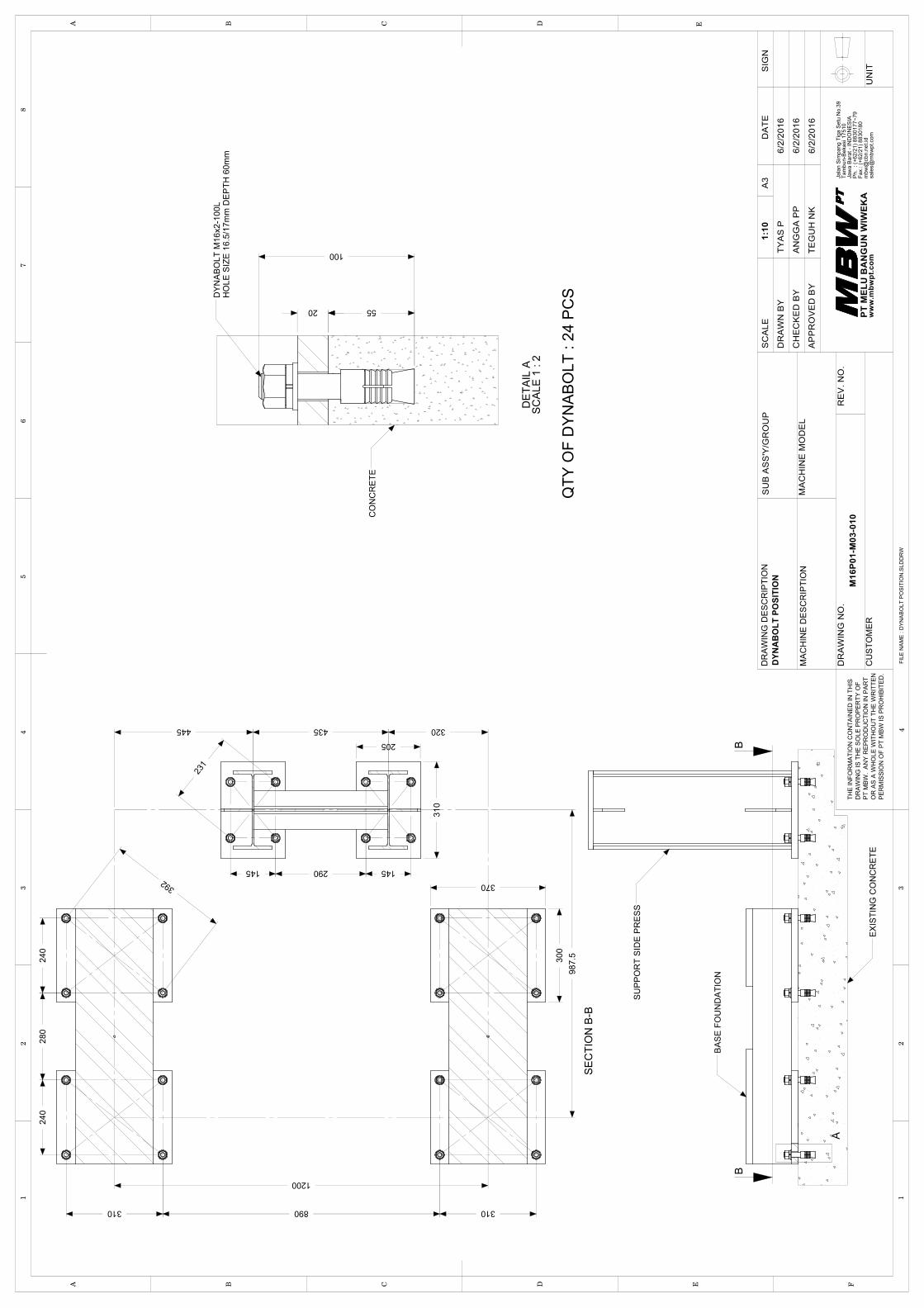
HO
LE S
IZE
16.5
/17m
m D
EPTH
60m
mD
YNAB
OLT
M16
x2-1
00L
CO
NC
RET
E
DET
AIL
ASC
ALE
1 : 2
20
100
6/2/
2016
6/2/
2016
1:10
sale
s@m
bwpt
.com
A3
FILE
NAM
E : D
YNAB
OLT
PO
SITI
ON
.SLD
DR
W
D E FC
12
3
BA
32
15
C D
46
7
PER
MIS
SIO
N O
F PT
MBW
IS P
RO
HIB
ITED
.
AP
PR
OV
ED
BY
B
4
EA
TYA
S P
CH
EC
KE
D B
Y
PT M
BW.
ANY
REP
RO
DU
CTI
ON
IN P
ART
8
SC
ALE
UN
IT
DR
AW
N B
Y
AN
GG
A P
P6/
2/20
16
DYN
AB
OLT
PO
SITI
ON
TEG
UH
NK
DA
TES
IGN
MAC
HIN
E D
ESC
RIP
TIO
N
M16
P01-
M03
-010
THE
INFO
RM
ATIO
N C
ON
TAIN
ED IN
TH
ISD
RA
WIN
G N
O.
OR
AS
A W
HO
LE W
ITH
OU
T TH
E W
RIT
TEN
MA
CH
INE
MO
DE
L
DR
AWIN
G D
ESC
RIP
TIO
N
CU
STO
MER
DR
AWIN
G IS
TH
E SO
LE P
RO
PER
TY O
F
RE
V. N
O.
Jala
n Si
mpa
ng T
iga
Setu
No.
39Ta
mbu
n-Be
kasi
175
10Ja
wa
Bara
t - IN
DO
NES
IAPh
. : (
+62/
21) 8
8301
77~7
9Fa
x.: (
+62/
21) 8
8301
80m
bw@
cbn.
net.i
d
SU
B A
SS
'Y/G
RO
UP
BASE
FO
UN
DAT
ION
EXIS
TIN
G C
ON
CR
ETE
SUPP
OR
T SI
DE
PRES
S
A
BB
QTY
OF
DYN
ABO
LT :
24 P
CS
SEC
TIO
N B
-B
310
145 290 145
310
280
2
40
890 310
300
370
240
205

Pembuatan spesimen uji

Axle Mounting

Frame bogie keseluruhan
Pembuatan Jig Pengujian

Instrumentasi Pengujian
Hydolics pack

Instrumentasi Pengujian

Hal| 1
Pengembangan Model Rangka Bogie Monorel Jenis Straddle Untuk Radius Belok Kecil
Sugiharto1; Gatot Prayogo2; Danardono AS2
1. Jurusan Teknik Mesin Universitas Paundan,
2. Departemen Teknik Mesin Universitas Indonesia
Abstrak
Kemampuan gerak belok pada radius kecil bogie monorel jenis straddle dipengaruhi oleh panjang kabin penumpang, jumlah poros roda penggerak, posisi pemasangan, dan fleksibilitas kesejajaran sumbu roda pengarah terhadap jari-jari lintasan beloknya. Pada paper ini dibahas pengembangan model rangka bogie monorel jenis straddle model poros ganda non-steerable yang dipasang secara konvensional. Kemampuan gerak belok pada radius kecil bogie jenis ini dapat ditingkatkan dengan memperbesar geometri offset area. Geometri ini ditingkatkan dengan melakukan perubahan desain penempatan roda pengarah disisi kiri dan kanan bogie. Perubahan dilakukan dengan menempatkan roda pengarah yang berfungi sebagai roda penyetabil sejajar dengan roda pengarah yang berfungsi sebagai roda kemudi. Analisis dilakukan secara numerik dengan bantuan perangkat lunak SimWise 4D, pada kedua model bogie sebelum dan sesudah perubahan desain. Hasil analisis menunjukan, model bogie sesudah perubahan desain (UTM125) dapat bergerak dengan setabil pada radius belok R=40 m, R=50 m, dan R=60 m, dengan kecepatan V=20 km/h, V=30 km/h, dan V=40 km/h. Sedangkan pada model bogie sebelum perubahan desain (UTM100) dapat bergerak dengan stabil pada R = 40 m dengan kecepatan V = 20 km/h, tapi untuk kecepatan lainnya bogie model ini terkunci diposisi lintasan beloknya. Kata kunci: monorel, bogie, poros ganda, non-steerable
Abstract Curving performance on small radius of the straddle type monorail bogie are influenced by the length of passenger cabins, number of drive wheel axles, installation position, and flexibility of the steering wheel axis aligned to the radius of the curving tracks. In this paper will be discuss the developments of the straddle type monorail bogie frame with a double axle model of non-steerable installed conventionally. Curving performance on the small radius of this type bogie can be increased by enlarging the offset area geometry. This area can be increased by the modifications of design on the placement of guiding wheels on the left and right bogie. A design modification performed by placing a guiding wheels that functions as a stabilizing wheels that are made parallel to the guiding wheels that functions as a steering wheels. The analysis was performed numerically with the aid the software SimWise 4D, on both models bogie before and after the design modification. Results of the analysis showed, the model bogie after a design modification (UTM125) can moves stable in the curving radius R=40 m, R= 50 m, and R= 60 m, with a speed of V= 20 km/h, V= 30 km/h and V= 40 km/h. While, on the model of a bogie before the design modification (UTM100) can be move with stable on the R= 40 m only at a speed of V= 20 km/h, and for the other speed this bogie is locked in position trajectory of the curve.
Keywords: straddle-monorail, bogie, double-axle, non-steerable
I. PENDAHULUAN
Pada monorel jenis straddle bogie berfungsi sebagai tumpuan dinamik kabin penumpang. Rangka
bogie merupakan komponen utama dimana ditempatkannya roda penggerak (running wheels), roda
pengarah (guiding wheels), motor penggerak, sistem suspensi, sistem pengereman, sistem transmisi
daya, sistem kendali, dan asesoris lainya.
Monorel jenis straddle merupakan monorel yang paling banyak diaplikasikan, karena memiliki keunggulan lebih dibanding jenis lainnya. Ishikawa (1999) seorang senior engineer dari Hitachi. Ltd, membuat prediksi dengan berbagai macam pertimbangan dan alasan, bahwa sistem monorel jenis straddle akan memimpin sistem transportasi massal di masa datang, hal ini didasarkan kepada kemungkinan monorel jenis ini untuk diaplikasikan dalam berbagai jenis ukuran, disesuaikan dengan kebutuhannya. Pernyataan ini diperkuat oleh rekannya, Kubawara (2001), yang mengusulkan monorel jenis straddle tipe kecil sebagai solusi transportasi diperkotaan jarak sedang, dengan alasan dan keuntungan dalam hal perbaikan lingkungan, masa pengerjaan konstruksi, dan efisiensi biaya konstruksinya. Konsep ini diperkuat oleh Siu (2007), yang membuat analisis dari inovasi sistem transit ringan untuk mobilitas perkotaan dalam perspektif pembangunan dan perencanaan sistem transportasi yang berkelanjutan [1].
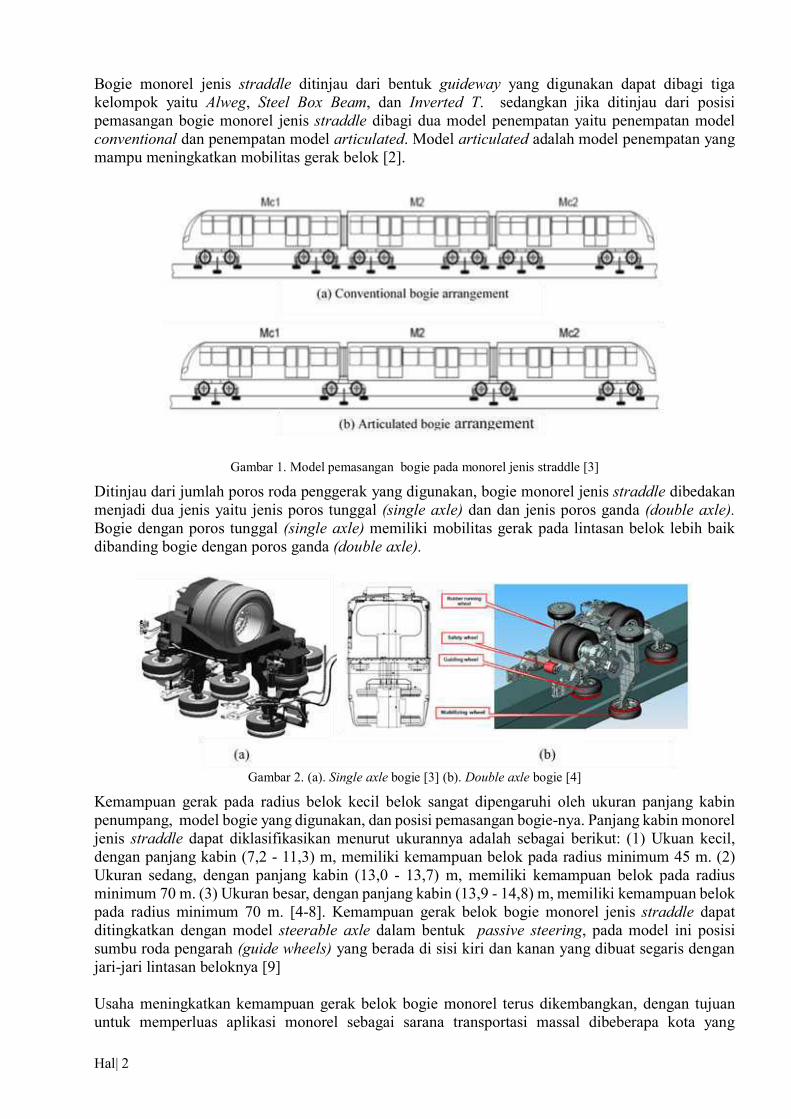
Hal| 2
Bogie monorel jenis straddle ditinjau dari bentuk guideway yang digunakan dapat dibagi tiga kelompok yaitu Alweg, Steel Box Beam, dan Inverted T. sedangkan jika ditinjau dari posisi pemasangan bogie monorel jenis straddle dibagi dua model penempatan yaitu penempatan model conventional dan penempatan model articulated. Model articulated adalah model penempatan yang mampu meningkatkan mobilitas gerak belok [2].
Gambar 1. Model pemasangan bogie pada monorel jenis straddle [3]
Ditinjau dari jumlah poros roda penggerak yang digunakan, bogie monorel jenis straddle dibedakan menjadi dua jenis yaitu jenis poros tunggal (single axle) dan dan jenis poros ganda (double axle). Bogie dengan poros tunggal (single axle) memiliki mobilitas gerak pada lintasan belok lebih baik dibanding bogie dengan poros ganda (double axle).
Gambar 2. (a). Single axle bogie [3] (b). Double axle bogie [4]
Kemampuan gerak pada radius belok kecil belok sangat dipengaruhi oleh ukuran panjang kabin penumpang, model bogie yang digunakan, dan posisi pemasangan bogie-nya. Panjang kabin monorel jenis straddle dapat diklasifikasikan menurut ukurannya adalah sebagai berikut: (1) Ukuan kecil, dengan panjang kabin (7,2 - 11,3) m, memiliki kemampuan belok pada radius minimum 45 m. (2) Ukuran sedang, dengan panjang kabin (13,0 - 13,7) m, memiliki kemampuan belok pada radius minimum 70 m. (3) Ukuran besar, dengan panjang kabin (13,9 - 14,8) m, memiliki kemampuan belok pada radius minimum 70 m. [4-8]. Kemampuan gerak belok bogie monorel jenis straddle dapat ditingkatkan dengan model steerable axle dalam bentuk passive steering, pada model ini posisi sumbu roda pengarah (guide wheels) yang berada di sisi kiri dan kanan yang dibuat segaris dengan jari-jari lintasan beloknya [9]
Usaha meningkatkan kemampuan gerak belok bogie monorel terus dikembangkan, dengan tujuan untuk memperluas aplikasi monorel sebagai sarana transportasi massal dibeberapa kota yang
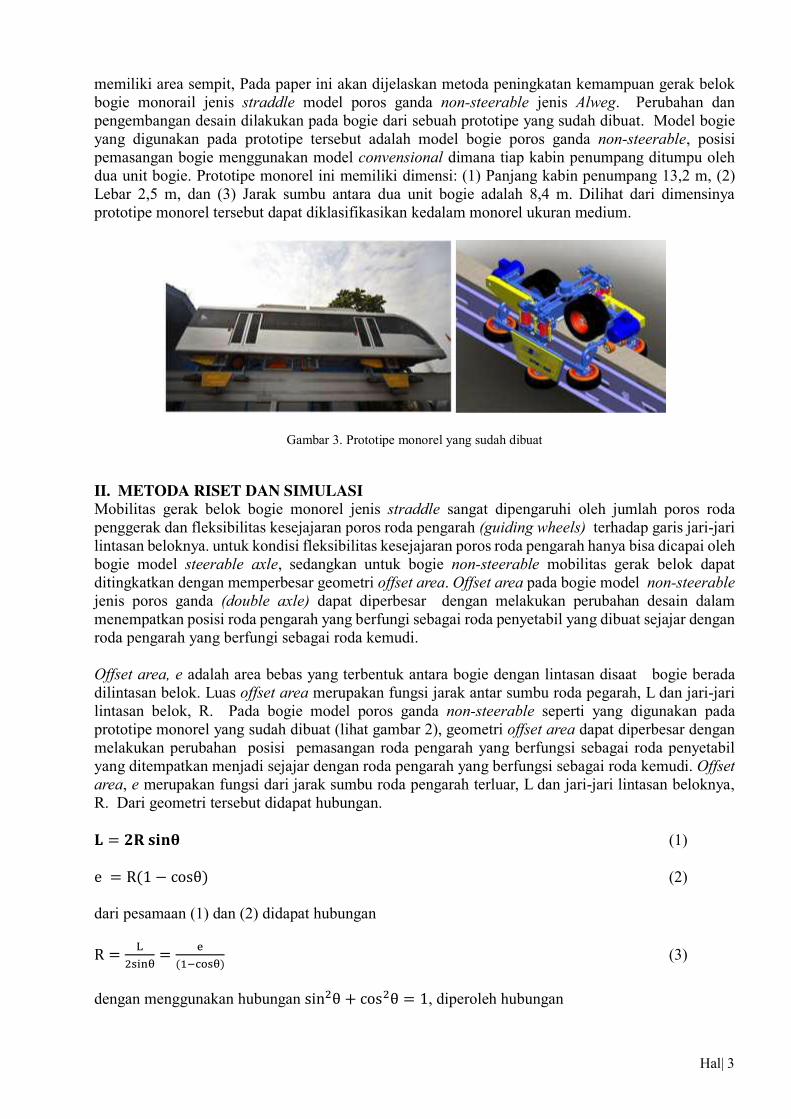
Hal| 3
memiliki area sempit, Pada paper ini akan dijelaskan metoda peningkatan kemampuan gerak belok bogie monorail jenis straddle model poros ganda non-steerable jenis Alweg. Perubahan dan pengembangan desain dilakukan pada bogie dari sebuah prototipe yang sudah dibuat. Model bogie yang digunakan pada prototipe tersebut adalah model bogie poros ganda non-steerable, posisi pemasangan bogie menggunakan model convensional dimana tiap kabin penumpang ditumpu oleh dua unit bogie. Prototipe monorel ini memiliki dimensi: (1) Panjang kabin penumpang 13,2 m, (2) Lebar 2,5 m, dan (3) Jarak sumbu antara dua unit bogie adalah 8,4 m. Dilihat dari dimensinya prototipe monorel tersebut dapat diklasifikasikan kedalam monorel ukuran medium.
Gambar 3. Prototipe monorel yang sudah dibuat
II. METODA RISET DAN SIMULASI
Mobilitas gerak belok bogie monorel jenis straddle sangat dipengaruhi oleh jumlah poros roda penggerak dan fleksibilitas kesejajaran poros roda pengarah (guiding wheels) terhadap garis jari-jari lintasan beloknya. untuk kondisi fleksibilitas kesejajaran poros roda pengarah hanya bisa dicapai oleh bogie model steerable axle, sedangkan untuk bogie non-steerable mobilitas gerak belok dapat ditingkatkan dengan memperbesar geometri offset area. Offset area pada bogie model non-steerable jenis poros ganda (double axle) dapat diperbesar dengan melakukan perubahan desain dalam menempatkan posisi roda pengarah yang berfungi sebagai roda penyetabil yang dibuat sejajar dengan roda pengarah yang berfungi sebagai roda kemudi.
Offset area, e adalah area bebas yang terbentuk antara bogie dengan lintasan disaat bogie berada dilintasan belok. Luas offset area merupakan fungsi jarak antar sumbu roda pegarah, L dan jari-jari lintasan belok, R. Pada bogie model poros ganda non-steerable seperti yang digunakan pada prototipe monorel yang sudah dibuat (lihat gambar 2), geometri offset area dapat diperbesar dengan melakukan perubahan posisi pemasangan roda pengarah yang berfungsi sebagai roda penyetabil yang ditempatkan menjadi sejajar dengan roda pengarah yang berfungsi sebagai roda kemudi. Offset area, e merupakan fungsi dari jarak sumbu roda pengarah terluar, L dan jari-jari lintasan beloknya, R. Dari geometri tersebut didapat hubungan.
� = �� ���� (1) e = R 1 − cosθ (2)
dari pesamaan (1) dan (2) didapat hubungan R = Lsi θ = e−c sθ (3)
dengan menggunakan hubungan sin θ + cos θ = 1, diperoleh hubungan
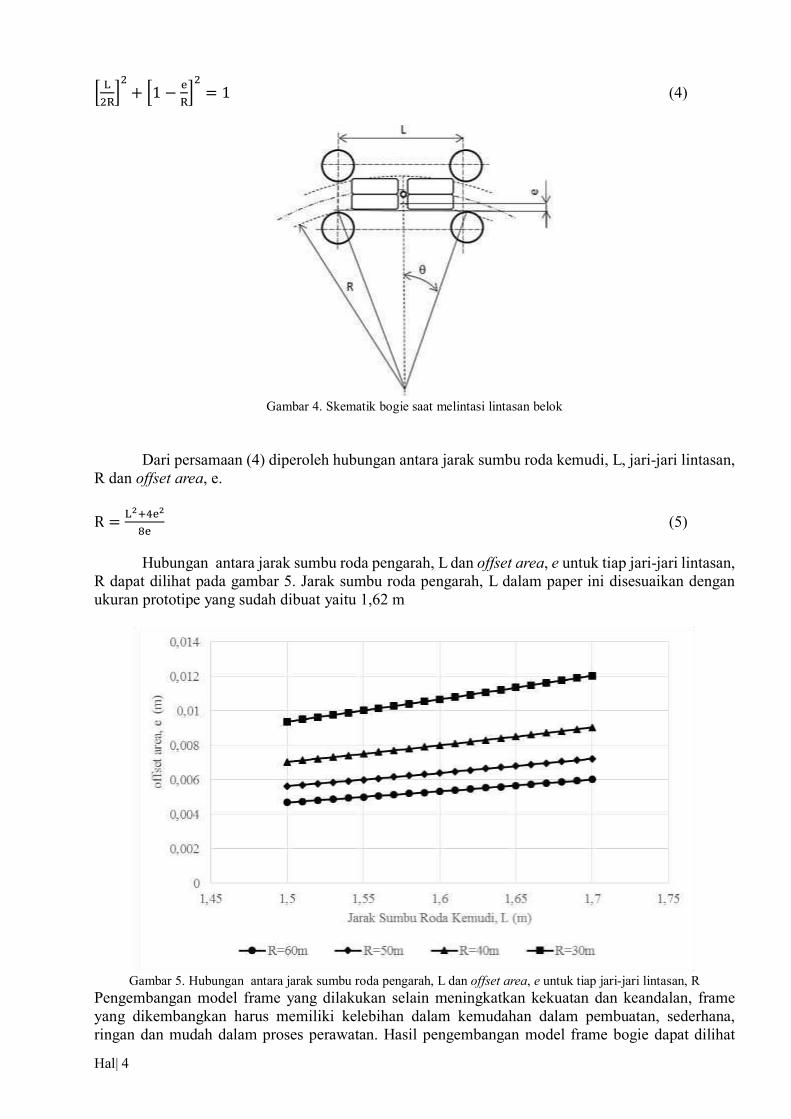
Hal| 4
[ LR] + [1 − eR] = 1 (4)
Gambar 4. Skematik bogie saat melintasi lintasan belok
Dari persamaan (4) diperoleh hubungan antara jarak sumbu roda kemudi, L, jari-jari lintasan, R dan offset area, e.
R = L2+4e28e (5)
Hubungan antara jarak sumbu roda pengarah, L dan offset area, e untuk tiap jari-jari lintasan, R dapat dilihat pada gambar 5. Jarak sumbu roda pengarah, L dalam paper ini disesuaikan dengan ukuran prototipe yang sudah dibuat yaitu 1,62 m
Gambar 5. Hubungan antara jarak sumbu roda pengarah, L dan offset area, e untuk tiap jari-jari lintasan, R
Pengembangan model frame yang dilakukan selain meningkatkan kekuatan dan keandalan, frame yang dikembangkan harus memiliki kelebihan dalam kemudahan dalam pembuatan, sederhana, ringan dan mudah dalam proses perawatan. Hasil pengembangan model frame bogie dapat dilihat
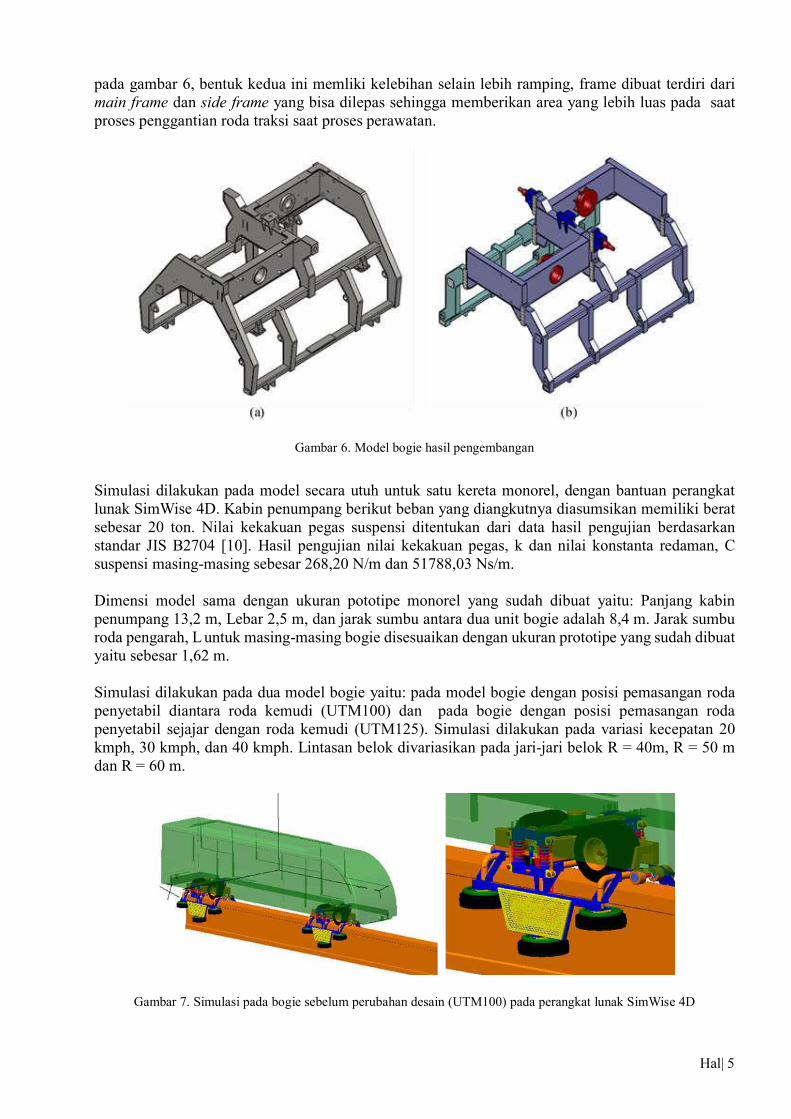
Hal| 5
pada gambar 6, bentuk kedua ini memliki kelebihan selain lebih ramping, frame dibuat terdiri dari main frame dan side frame yang bisa dilepas sehingga memberikan area yang lebih luas pada saat proses penggantian roda traksi saat proses perawatan.
Gambar 6. Model bogie hasil pengembangan
Simulasi dilakukan pada model secara utuh untuk satu kereta monorel, dengan bantuan perangkat lunak SimWise 4D. Kabin penumpang berikut beban yang diangkutnya diasumsikan memiliki berat sebesar 20 ton. Nilai kekakuan pegas suspensi ditentukan dari data hasil pengujian berdasarkan standar JIS B2704 [10]. Hasil pengujian nilai kekakuan pegas, k dan nilai konstanta redaman, C suspensi masing-masing sebesar 268,20 N/m dan 51788,03 Ns/m.
Dimensi model sama dengan ukuran pototipe monorel yang sudah dibuat yaitu: Panjang kabin penumpang 13,2 m, Lebar 2,5 m, dan jarak sumbu antara dua unit bogie adalah 8,4 m. Jarak sumbu roda pengarah, L untuk masing-masing bogie disesuaikan dengan ukuran prototipe yang sudah dibuat yaitu sebesar 1,62 m.
Simulasi dilakukan pada dua model bogie yaitu: pada model bogie dengan posisi pemasangan roda penyetabil diantara roda kemudi (UTM100) dan pada bogie dengan posisi pemasangan roda penyetabil sejajar dengan roda kemudi (UTM125). Simulasi dilakukan pada variasi kecepatan 20 kmph, 30 kmph, dan 40 kmph. Lintasan belok divariasikan pada jari-jari belok R = 40m, R = 50 m dan R = 60 m.
Gambar 7. Simulasi pada bogie sebelum perubahan desain (UTM100) pada perangkat lunak SimWise 4D
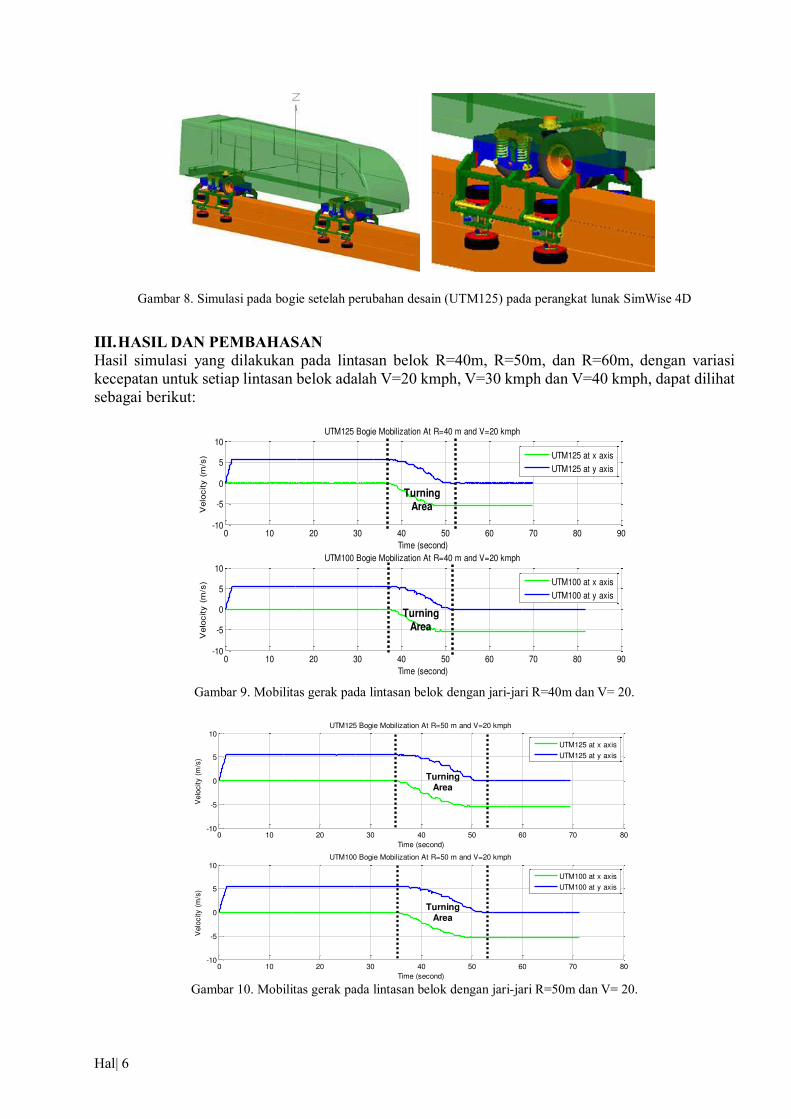
Hal| 6
Gambar 8. Simulasi pada bogie setelah perubahan desain (UTM125) pada perangkat lunak SimWise 4D
III. HASIL DAN PEMBAHASAN
Hasil simulasi yang dilakukan pada lintasan belok R=40m, R=50m, dan R=60m, dengan variasi kecepatan untuk setiap lintasan belok adalah V=20 kmph, V=30 kmph dan V=40 kmph, dapat dilihat sebagai berikut:
Gambar 9. Mobilitas gerak pada lintasan belok dengan jari-jari R=40m dan V= 20.
Gambar 10. Mobilitas gerak pada lintasan belok dengan jari-jari R=50m dan V= 20.
0 10 20 30 40 50 60 70 80 90-10
-5
0
5
10
Velo
city (
m/s
)
Time (second)
UTM125 Bogie Mobilization At R=40 m and V=20 kmph
UTM125 at x axis
UTM125 at y axis
0 10 20 30 40 50 60 70 80 90-10
-5
0
5
10
Velo
city (
m/s
)
Time (second)
UTM100 Bogie Mobilization At R=40 m and V=20 kmph
UTM100 at x axis
UTM100 at y axis
Turning
Area
Turning
Area
0 10 20 30 40 50 60 70 80-10
-5
0
5
10
Velo
city (
m/s
)
Time (second)
UTM125 Bogie Mobilization At R=50 m and V=20 kmph
UTM125 at x axis
UTM125 at y axis
0 10 20 30 40 50 60 70 80-10
-5
0
5
10
Velo
city (
m/s
)
Time (second)
UTM100 Bogie Mobilization At R=50 m and V=20 kmph
UTM100 at x axis
UTM100 at y axis
Turning
Area
Turning
Area
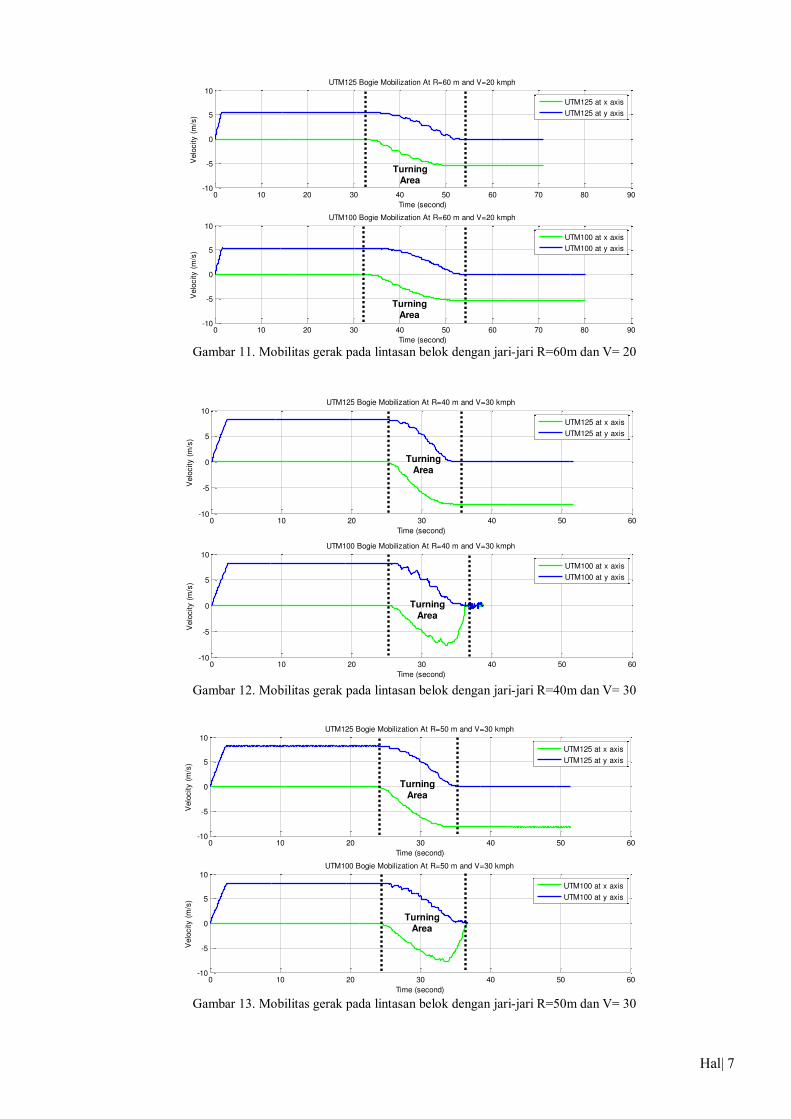
Hal| 7
Gambar 11. Mobilitas gerak pada lintasan belok dengan jari-jari R=60m dan V= 20
Gambar 12. Mobilitas gerak pada lintasan belok dengan jari-jari R=40m dan V= 30
Gambar 13. Mobilitas gerak pada lintasan belok dengan jari-jari R=50m dan V= 30
0 10 20 30 40 50 60 70 80 90-10
-5
0
5
10
Velo
city (
m/s
)
Time (second)
UTM125 Bogie Mobilization At R=60 m and V=20 kmph
UTM125 at x axis
UTM125 at y axis
0 10 20 30 40 50 60 70 80 90-10
-5
0
5
10
Velo
city (
m/s
)
Time (second)
UTM100 Bogie Mobilization At R=60 m and V=20 kmph
UTM100 at x axis
UTM100 at y axis
Turning
Area
Turning
Area
0 10 20 30 40 50 60-10
-5
0
5
10
Velo
city (
m/s
)
Time (second)
UTM125 Bogie Mobilization At R=40 m and V=30 kmph
UTM125 at x axis
UTM125 at y axis
0 10 20 30 40 50 60-10
-5
0
5
10
Velo
city (
m/s
)
Time (second)
UTM100 Bogie Mobilization At R=40 m and V=30 kmph
UTM100 at x axis
UTM100 at y axis
Turning
Area
Turning
Area
0 10 20 30 40 50 60-10
-5
0
5
10
Velo
city (
m/s
)
Time (second)
UTM125 Bogie Mobilization At R=50 m and V=30 kmph
UTM125 at x axis
UTM125 at y axis
0 10 20 30 40 50 60-10
-5
0
5
10
Velo
city (
m/s
)
Time (second)
UTM100 Bogie Mobilization At R=50 m and V=30 kmph
UTM100 at x axis
UTM100 at y axis
Turning
Area
Turning
Area
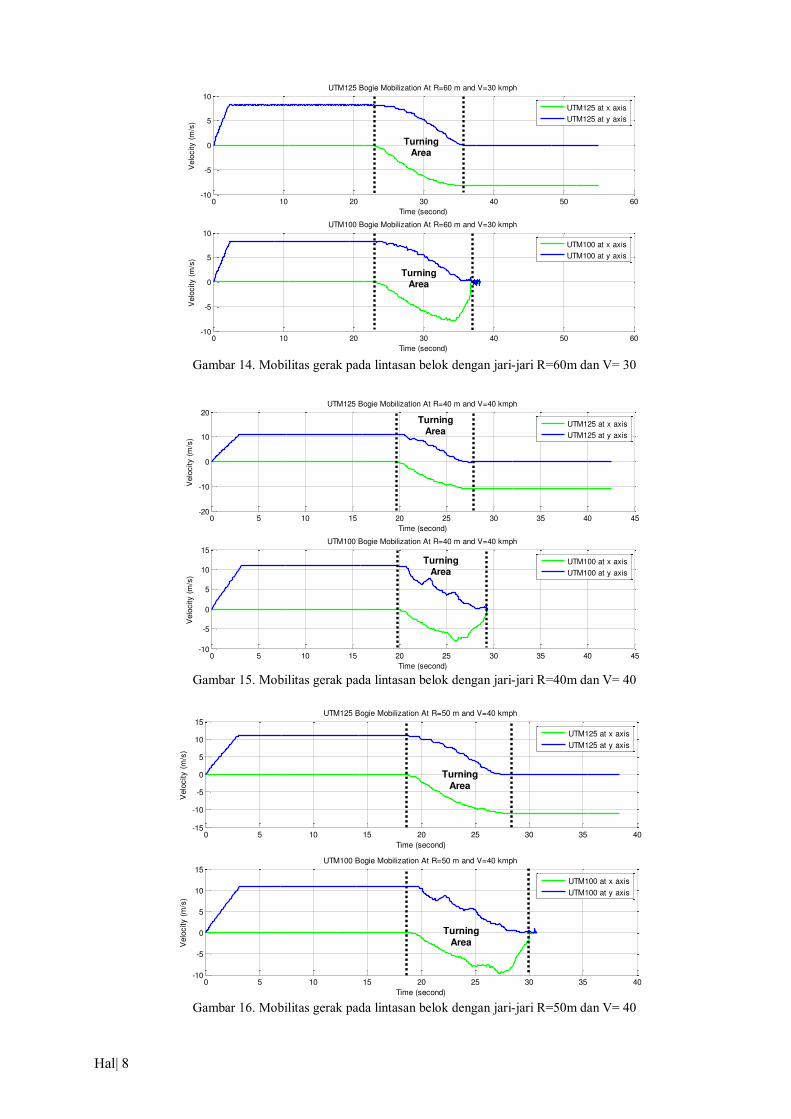
Hal| 8
Gambar 14. Mobilitas gerak pada lintasan belok dengan jari-jari R=60m dan V= 30
Gambar 15. Mobilitas gerak pada lintasan belok dengan jari-jari R=40m dan V= 40
Gambar 16. Mobilitas gerak pada lintasan belok dengan jari-jari R=50m dan V= 40
0 10 20 30 40 50 60-10
-5
0
5
10
Velo
city (
m/s
)
Time (second)
UTM125 Bogie Mobilization At R=60 m and V=30 kmph
UTM125 at x axis
UTM125 at y axis
0 10 20 30 40 50 60-10
-5
0
5
10
Velo
city (
m/s
)
Time (second)
UTM100 Bogie Mobilization At R=60 m and V=30 kmph
UTM100 at x axis
UTM100 at y axis
Turning
Area
Turning
Area
0 5 10 15 20 25 30 35 40 45-20
-10
0
10
20
Velo
city (
m/s
)
Time (second)
UTM125 Bogie Mobilization At R=40 m and V=40 kmph
UTM125 at x axis
UTM125 at y axis
0 5 10 15 20 25 30 35 40 45-10
-5
0
5
10
15
Velo
city (
m/s
)
Time (second)
UTM100 Bogie Mobilization At R=40 m and V=40 kmph
UTM100 at x axis
UTM100 at y axis
Turning
Area
Turning
Area
0 5 10 15 20 25 30 35 40-15
-10
-5
0
5
10
15
Velo
city (
m/s
)
Time (second)
UTM125 Bogie Mobilization At R=50 m and V=40 kmph
UTM125 at x axis
UTM125 at y axis
0 5 10 15 20 25 30 35 40-10
-5
0
5
10
15
Velo
city (
m/s
)
Time (second)
UTM100 Bogie Mobilization At R=50 m and V=40 kmph
UTM100 at x axis
UTM100 at y axis
Turning
Area
Turning
Area
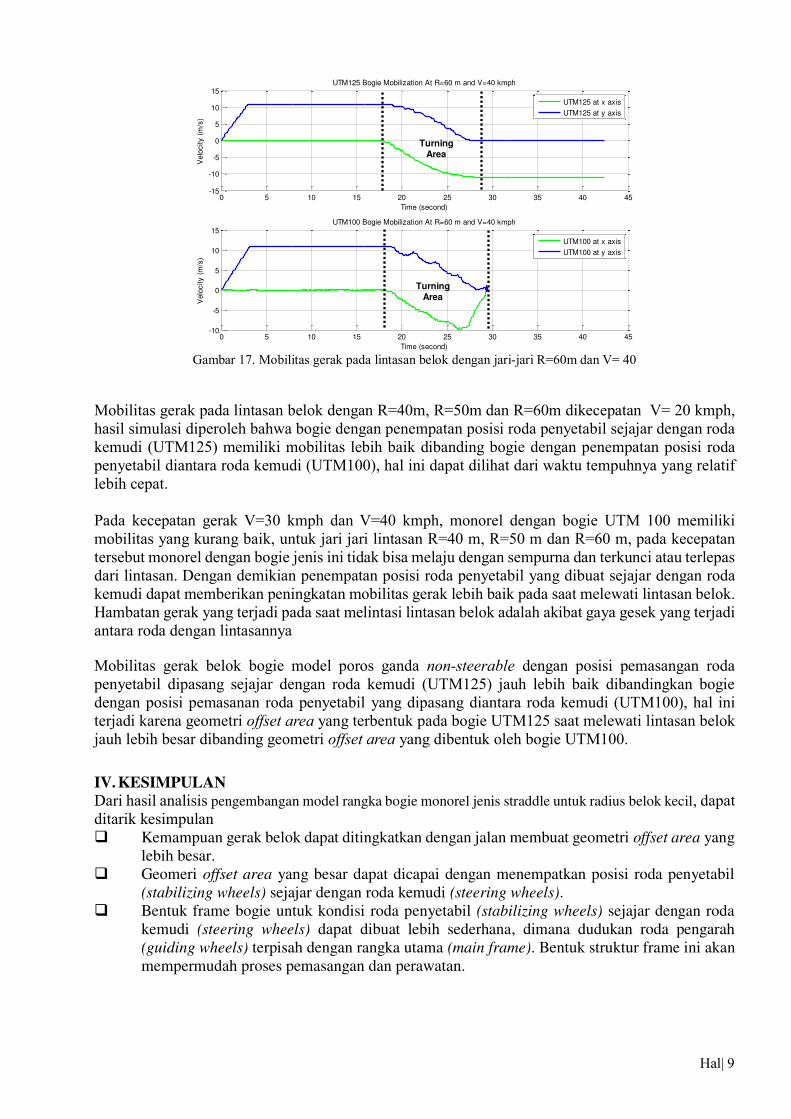
Hal| 9
Gambar 17. Mobilitas gerak pada lintasan belok dengan jari-jari R=60m dan V= 40
Mobilitas gerak pada lintasan belok dengan R=40m, R=50m dan R=60m dikecepatan V= 20 kmph, hasil simulasi diperoleh bahwa bogie dengan penempatan posisi roda penyetabil sejajar dengan roda kemudi (UTM125) memiliki mobilitas lebih baik dibanding bogie dengan penempatan posisi roda penyetabil diantara roda kemudi (UTM100), hal ini dapat dilihat dari waktu tempuhnya yang relatif lebih cepat.
Pada kecepatan gerak V=30 kmph dan V=40 kmph, monorel dengan bogie UTM 100 memiliki mobilitas yang kurang baik, untuk jari jari lintasan R=40 m, R=50 m dan R=60 m, pada kecepatan tersebut monorel dengan bogie jenis ini tidak bisa melaju dengan sempurna dan terkunci atau terlepas dari lintasan. Dengan demikian penempatan posisi roda penyetabil yang dibuat sejajar dengan roda kemudi dapat memberikan peningkatan mobilitas gerak lebih baik pada saat melewati lintasan belok. Hambatan gerak yang terjadi pada saat melintasi lintasan belok adalah akibat gaya gesek yang terjadi antara roda dengan lintasannya
Mobilitas gerak belok bogie model poros ganda non-steerable dengan posisi pemasangan roda penyetabil dipasang sejajar dengan roda kemudi (UTM125) jauh lebih baik dibandingkan bogie dengan posisi pemasanan roda penyetabil yang dipasang diantara roda kemudi (UTM100), hal ini terjadi karena geometri offset area yang terbentuk pada bogie UTM125 saat melewati lintasan belok jauh lebih besar dibanding geometri offset area yang dibentuk oleh bogie UTM100.
IV. KESIMPULAN
Dari hasil analisis pengembangan model rangka bogie monorel jenis straddle untuk radius belok kecil, dapat ditarik kesimpulan
Kemampuan gerak belok dapat ditingkatkan dengan jalan membuat geometri offset area yang
lebih besar.
Geomeri offset area yang besar dapat dicapai dengan menempatkan posisi roda penyetabil
(stabilizing wheels) sejajar dengan roda kemudi (steering wheels).
Bentuk frame bogie untuk kondisi roda penyetabil (stabilizing wheels) sejajar dengan roda
kemudi (steering wheels) dapat dibuat lebih sederhana, dimana dudukan roda pengarah
(guiding wheels) terpisah dengan rangka utama (main frame). Bentuk struktur frame ini akan
mempermudah proses pemasangan dan perawatan.
0 5 10 15 20 25 30 35 40 45-15
-10
-5
0
5
10
15
Velo
city (
m/s
)Time (second)
UTM125 Bogie Mobilization At R=60 m and V=40 kmph
UTM125 at x axis
UTM125 at y axis
0 5 10 15 20 25 30 35 40 45-10
-5
0
5
10
15
Velo
city (
m/s
)
Time (second)
UTM100 Bogie Mobilization At R=60 m and V=40 kmph
UTM100 at x axis
UTM100 at y axis
Turning
Area
Turning
Area
Hal| 10
V. UCAPAN TERIMAKSIH Pada kesempatan ini penulis mengucapkan banyak terimakasih pada kemetrian RISETDIKTI yang sudah membiayai penelitian ini lewat Hibah Penelitian Desertasi Doktor 2016.
VI. DAFTAR PUSTAKA 1. Danardono et all, (2013), “Simulasi Numerik Dalam Studi Awal Desain Guide Wheel Base Bogie untuk
Meningkatkan Mampu Belok Monorel Produksi PT. MBW”, Proceeding Seminar Nasional Tahunan Teknik Mesin
XII (SNTTM XII) Universitas Lampung, Bandar Lampung, 23-24 Oktober 2013
2. Kenjiro Goda (2002), Improving Curving Performance for Articulated-Type Small Monorail Car, Transactions of
the Japan Society of Mechanical Engineers Series C Vol. 68 (2002) No. 672 P 2410-2417
3. Danardono. AS, et all (2014), “Preliminary Analysis in the Improvement Turning Abilities in Design of the Monorail
Bogie PT. MBW Indonesia”, Applied Mechanics and Materials Vol. 663 (2014) pp 539-543
4. Ryan R. Kennedy ( 2010) Considering Monorail Rapid Transit for North American Cities
5. DMJM+HARRIS (2001), Monorail Technology Assessment Paper, prepared for Montgomery County Department
of Public Works and Transportation
6. Amin Tarighi (2011), “ Multi-criteria feasibility assessment of the monorail transportation system in Metu campus”, A thesis submitted to the gradate school of natural and applied science of Middle East Technical University, Januari,
2011.
7. Takeo Kuwabara (2001), New Solution for Urban Traffic: Small-type Monorail System, Hitachi Review Vol. 50
(2001), No. 4
8. Akira Nehashi (2001), “New Types of Guided Transport”, Japan Railway & Transport Review 26, February 2001. 9. Roudiere et.all (2014), “Passive Steering Assist Device For A Monorail Bogie”, US Patent No. US 2014/0261063
A1, Publication date: September 18, 2014
10. JIS B2704 (2009), “Coil springs –Part 1-2”, JIS, 2009
Top Related
Copyright © 2022 FDOKUMEN

