






Bahasa
Halaman
Hukum

A. ACARA
Pengukuran dan pengambilan data tugas besar
B. WAKTU DAN TANGGAL PENGAMATAN
Praktikum 1
Tanggal : 21 November 2012
Hari : Rabu
Waktu : 15.30 – 18.00 WITA
Praktikum 2
Tanggal : 22 November 2012
Hari : Kamis
Waktu : 07.00 – 12.00 WITA
C. LOKASI PENGAMATAN
Pengamatan ini kami lakukan di wilayah Folder, Jl. A.W Syahrani
Samarinda.
D. PENDAHULUAN
1. Latar Belakang
Dalam melakukan pemetaan kita perlu memperhatikan berbagai macam hal
yang sangat penting dalam melakukan pekerjaan ini. Hal yang perlu diperhatikan
adalah sudut horizontal jarak, beda tinggi, azimut, koordinat, pengukuran titik detail
dan yang paling harus diperhatikan adalah pengoreksian titik yang telah kita ukur.
Setelah proses tersebut kita lakukan, maka barulah kita dapat melakukan ploting dan
penggambaran hasil yang telah kita peroleh kedalam sebuah peta. Untuk
mengurangi kesalahan yang terjadi sebaiknya dalam melakukan pemetaan kita
memasang patok / titik yang kita gunakan sebagai titik acuan sebaiknya jaraknya
tidak terlelu jauh satu sama lain. Biasanya jika jarak yang kita gunakan berdekatan
kesalahan yang kita peroleh sangat kecil dan dapat diabaikan.
Kesalahan yang terjadi pada pengukuran jarak dekat dan pada daerah yang
sempit juga akan mempermudah kita dalam melakukan pengoreksian titik. Kesalahan
1
dalam pengukuran jarak, sudut horizontal, beda tinggi, azimuth, koordinat dan titik
detail yng sagat kecil sehingga proses pengolahan data akan dianggap akurat .
Semacam ini sangat perlu ketelitian lain halnya jika pemetaan dengan menggunakan
foto udara dan satelit maka hasil yang diperoleh lebih akurat jika dibandingkan
pemetaan langsung dilapangan.
Hal–hal inilah yang melatar belakangi kita untuk melakukan praktikum
perpetaan ini agar kita bisa mengetahui serta mengukur langsung secara praktek
dilapangan sehingga bisa lebih mengerti secara langsung proses-proses pemetaan
tanpa hanya terpaku pada teori yang digunakan. Selain itu praktikum ini diharapkan
bisa dimengerti dengan baik agar apaila kita memperoleh pekerjaan dibidang
pemetaan kita bisa lebih mudah melakukannya karena sudah mempelajari dasar-
dasarnya selama dibangku kuliah.
2. Tujuan
a. Agar Praktikan dapat menggunakan alat theodolit dengan benar dan sesuai
dengan prosedur.
b. Praktikan dapat melakukan pengukuran sudut horizontal, jarak optis, beda
tinggi, azimuth, pengkoreksian titik, dan ploting.
c. Praktikan dapat mengetahui beda tinggi dari setiap stasiun atau tempat
didirikannya patok.
2
E. DASAR TEORI
Theodolit (TO)
Theodolit (TO) adalah theodolit - theodolit boussale yang dibuat oleh Witd.
Pada alat tersebut terdapat jarum mahred yang terbuat dari plat-plat baja yang
berbentuk empat persegi panjang dengan lebar 2 cm. Melekat pada sisi-sisi pesawat,
dengan menjepit jarum tersebut, pinggiran sisi boussale sehingga tidak dapat
bergerak dan alat dapat berfungsi sebagai theodolit.
Alat theodolit ini digunakan untuk menentukan titik-titik ketinggian yang
akan memerlukan letak garis kontur. Alat ukur ini sangat fleksibel dibandingkan alat
ukur lain. Pada alat ukur ini keadaan morfologi daerah tidak menjadi kendala,
disebabkan alat ini ada perhitungan beda tinggi dengan data yang diambil langsung
pada saat pengukuran.
Theodolit utamanya digunakan sebagai alat ukur sudut horizontal ataupun
vertikal dan mengukur jarak optis. Theodolit mempunyai sistem salib sumbu
imaginer (tidak tampak), yaitu :
a) Sumbu I atau sumbu vertical (sumbu V – V )
b) Sumbu II atau sumbu horizontal (sumbu H – H) sebagai sumbu putar arah
vertical.
c) Garis bidik (komilasi Z – Z) sebagai arah bidikan teropon
KONSTRUKSI THEODOLITE
Konstruksi instrument theodolite ini secara mendasar dibagimenjadi 3
bagian, lihat gambar di bawah ini :
3
1. Bagian Bawah, terdiri dari pelat dasar dengan tiga sekrup penyetel yang
menyanggah suatu tabung sumbu dan pelat mendatar berbentuk lingkaran. Pada
tepi lingkaran ini dibuat pengunci limbus.
2. Bagian Tengah, terdiri dari suatu sumbu yang dimasukkan ke dalam tabung dan
diletakkan pada bagian bawah. Sumbu ini adalah sumbu tegak lurus kesatu.
Diatas sumbu kesatu diletakkan lagi suatu plat yang berbentuk lingkaran yang
berbentuk lingkaran yang mempunyai jari – jari plat pada bagian bawah. Pada
dua tempat di tepi lingkaran dibuat alat pembaca nonius. Di atas plat nonius ini
ditempatkan 2 kaki yang menjadi penyanggah sumbu mendatar atau sumbu
kedua dan sutu nivo tabung diletakkan untuk membuat sumbu kesatu tegak
lurus. Lingkaran dibuat dari kaca dengan garis – garis pembagian skala dan
angka digoreskan di permukaannya. Garis – garis tersebut sangat tipis dan lebih
jelas tajam bila dibandingkan hasil goresan pada logam. Lingkaran dibagi dalam
derajat sexagesimal yaitu suatu lingkaran penuh dibagi dalam 360° atau dalam
grades senticimal yaitu satu lingkaran penuh dibagi dalam 400 g.
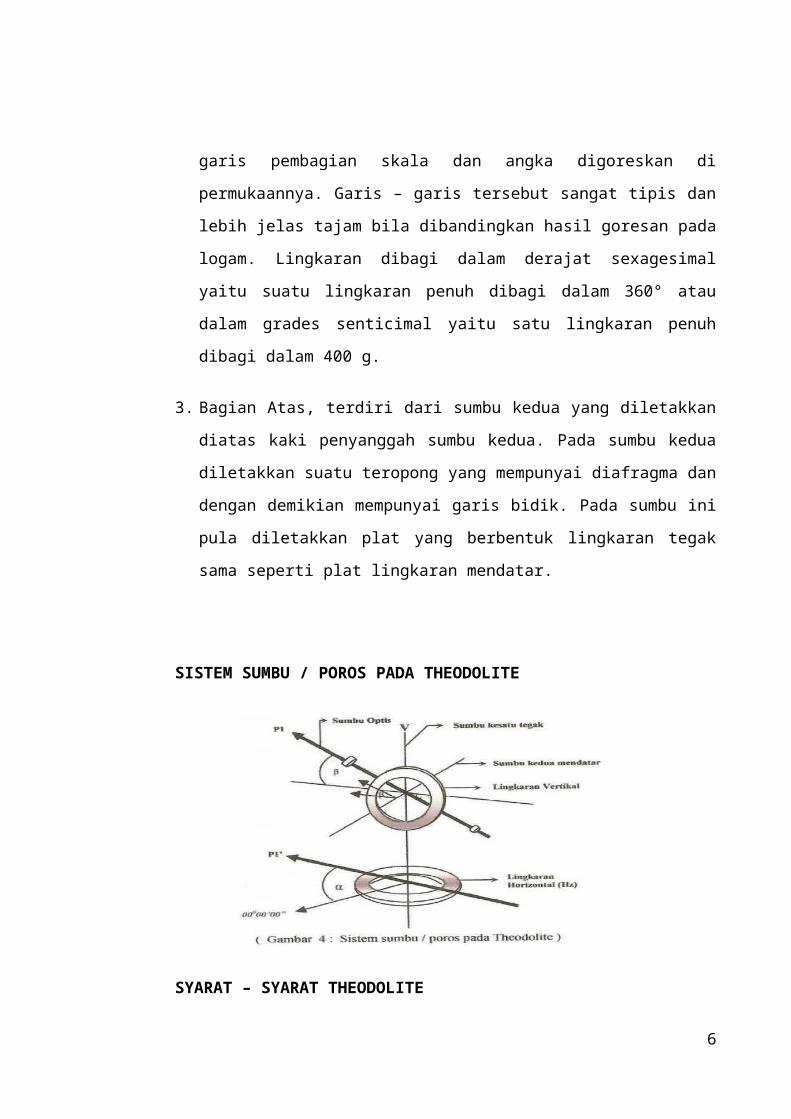
3. Bagian Atas, terdiri dari sumbu kedua yang diletakkan diatas kaki penyanggah
sumbu kedua. Pada sumbu kedua diletakkan suatu teropong yang mempunyai
diafragma dan dengan demikian mempunyai garis bidik. Pada sumbu ini pula
diletakkan plat yang berbentuk lingkaran tegak sama seperti plat lingkaran
mendatar.
4

SISTEM SUMBU / POROS PADA THEODOLITE
SYARAT – SYARAT THEODOLITE
Syarat – syarat utama yang harus dipenuhi alat theodolite sehingga siap
dipergunakan untuk pengukuran yang benar adalah sbb :
1. Sumbu kesatu benar – benar tegak / vertikal.
2. Sumbu Kedua harus benar – benar mendatar.
3. Garis bidik harus tegak lurus sumbu kedua / mendatar.
4. Tidak adanya salah indeks pada lingkaran kesatu.
MACAM – MACAM THEODOLIT
Dari konstruksi dan cara pengukuran, dikenal 3 macam theodolite :
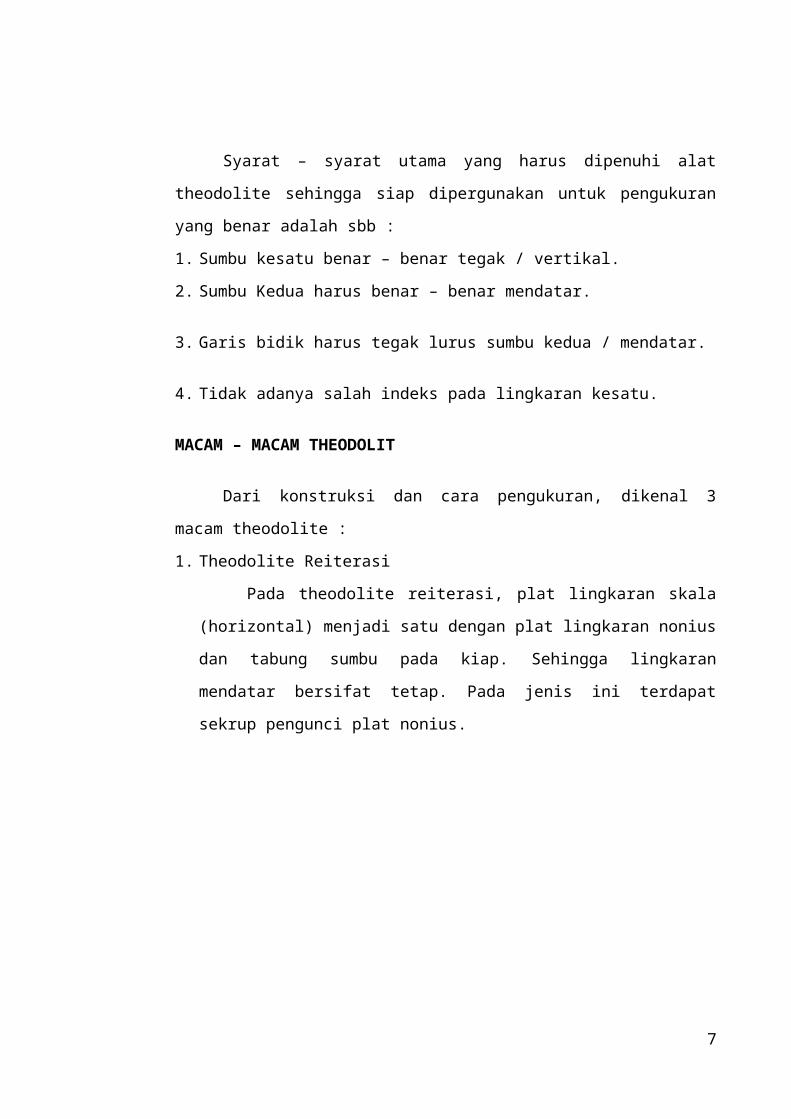
1. Theodolite Reiterasi
Pada theodolite reiterasi, plat lingkaran skala (horizontal) menjadi satu
dengan plat lingkaran nonius dan tabung sumbu pada kiap. Sehingga lingkaran
mendatar bersifat tetap. Pada jenis ini terdapat sekrup pengunci plat nonius.
5
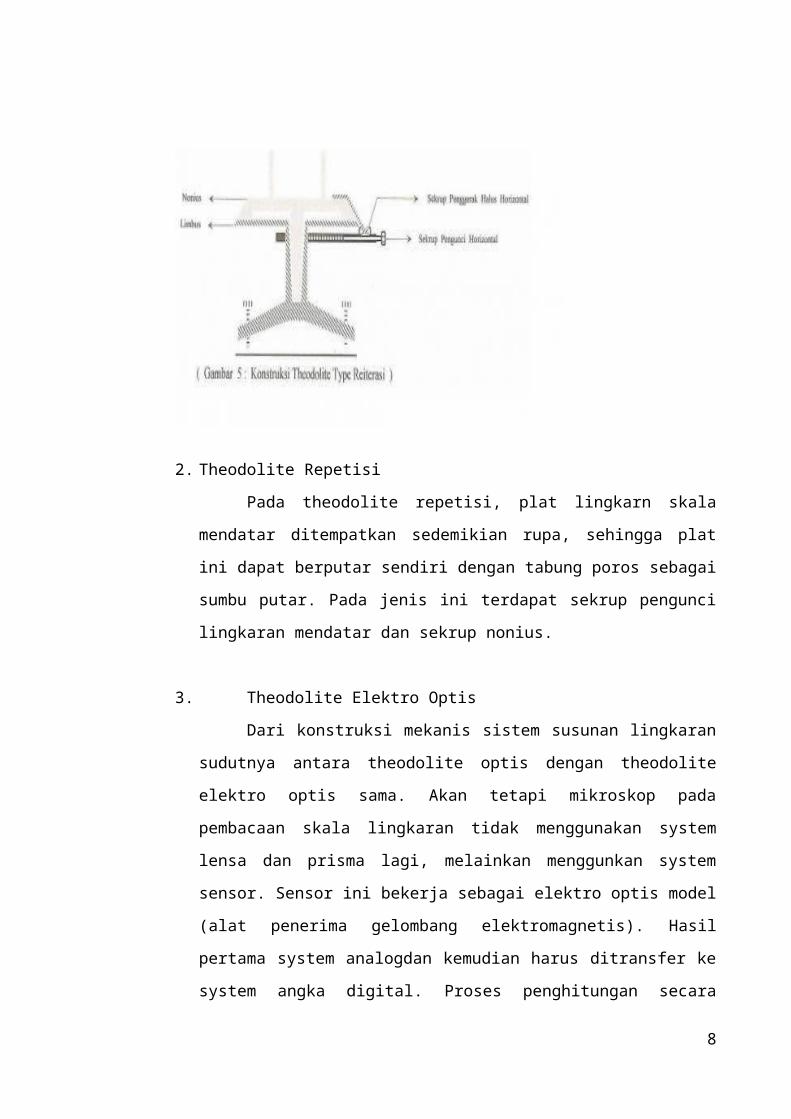
2. Theodolite Repetisi
Pada theodolite repetisi, plat lingkarn skala mendatar ditempatkan
sedemikian rupa, sehingga plat ini dapat berputar sendiri dengan tabung poros
sebagai sumbu putar. Pada jenis ini terdapat sekrup pengunci lingkaran mendatar
dan sekrup nonius.
3. Theodolite Elektro Optis
Dari konstruksi mekanis sistem susunan lingkaran sudutnya antara
theodolite optis dengan theodolite elektro optis sama. Akan tetapi mikroskop
pada pembacaan skala lingkaran tidak menggunakan system lensa dan prisma
lagi, melainkan menggunkan system sensor. Sensor ini bekerja sebagai elektro
optis model (alat penerima gelombang elektromagnetis). Hasil pertama system
analogdan kemudian harus ditransfer ke system angka digital. Proses
penghitungan secara otomatis akan ditampilkan pada layer (LCD) dalam angka
decimal.
6
PENGOPERASIAN THEODOLITE
- Penyiapan Alat Theodolite
Cara kerja penyiapan alat theodolita antara lain :
1. Kendurkan sekrup pengunci perpanjangan
2. Tinggikan setinggi dada
3. Kencangkan sekrup pengunci perpanjangan
4. Buat kaki statif berbentuk segitiga sama sisi
5. Kuatkan (injak) pedal kaki statif
6. Atur kembali ketinggian statif sehingga tribar plat mendatar
7. Letakkan theodolite di tribar plat
8. Kencangkan sekrup pengunci centering ke theodolite
9. Atur (levelkan) nivo kotak sehingga sumbu kesatu benar-benar tegak /
vertical dengan menggerakkan secara beraturan sekrup pendatar / kiap di tiga
sisi alat ukur tersebut.
10. Atur (levelkan) nivo tabung sehingga sumbu kedua benar-benar mendatar
dengan menggerakkan secara beraturan sekrup pendatar / kiap di tiga sisi
alat ukur tersebut.
11. Posisikan theodolite dengan mengendurkan sekrup pengunci centering
kemudian geser kekiri atau kekanan sehingga tepat pada tengah-tengah titi
ikat (BM), dilihat dari centering optic.
7
12. Lakukan pengujian kedudukan garis bidik dengan bantuan tanda T pada
dinding.
13. Periksa kembali ketepatan nilai index pada system skala lingkaran dengan
melakukan pembacaan sudut biasa dan sudut luar biasa untuk mengetahui
nilai kesalaha index tersebut.
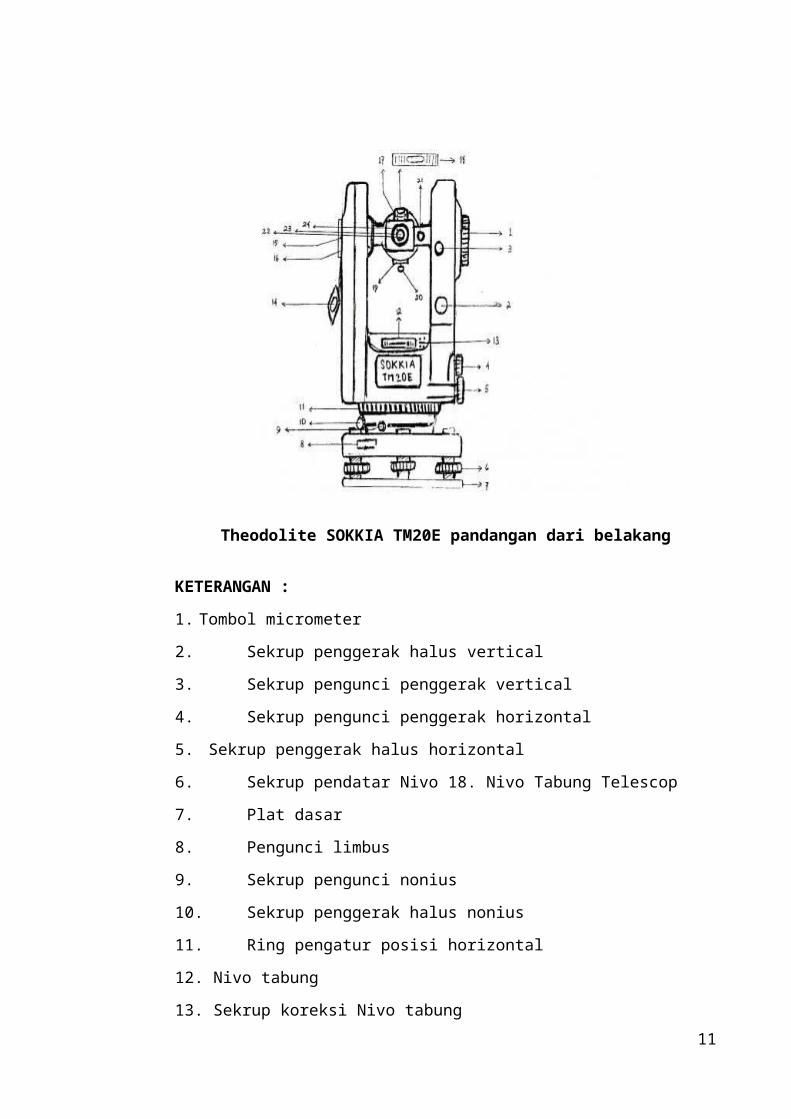
Theodolite SOKKIA TM20E pandangan dari belakang
KETERANGAN :
1. Tombol micrometer
2. Sekrup penggerak halus vertical
3. Sekrup pengunci penggerak vertical
4. Sekrup pengunci penggerak horizontal
5. Sekrup penggerak halus horizontal
6. Sekrup pendatar Nivo 18. Nivo Tabung Telescop
7. Plat dasar
8. Pengunci limbus
9. Sekrup pengunci nonius
8
10. Sekrup penggerak halus nonius
11. Ring pengatur posisi horizontal
12. Nivo tabung
13. Sekrup koreksi Nivo tabung
14. Reflektor cahaya
15. Tanda ketinggian alat
16. Slot penjepit
17. Sekrup pengunci Nivo Tabung Telescop
18. Nivo Tabung Telescop
19. Pemantul cahaya penglihatan Nivo
20. Visir Collimator
21. Lensa micrometer
22. Ring focus benang diafragma
23. Lensa okuler
Statif (kaki tiga)
Statif ini digunakan sebagai dari alat thedolit pada saat pengukuran
dilakukan, statif ini biasanya terbuat dari kayu atau aluminium seng yang dapat
disetel sesuai dengan ketinggian yang diinginkan. Bagian bawah (pada kaki statif)
terdapat daerah yang agak lancip, dimaksudkan untuk menancapkan kaki statif (alat
theodolit) agar kokoh dan tidak bergerak. Hal ini sangat penting, karena apabilastatif
bergerak sedikit saja, maka sudut yang dihasilkan akan berubah. Penempatan statif
ditempatkan didaerah yang agak datar, supaya lebih mempermudah menset nipo
horizontal atau jika memang daerahnya berbukit (tidak datar), usahakan ketiga kaki
statif ini membuat keadaan sedemikian rupa sehingga theodolit dirasakan datar
deari nivo horizontal diset supaya berada ditengah-tengah dengan demikian
walaupun titik pengamatan terletak pada daerah yang tidak rata tetapi pengukuran
tetap dilanjutkan.
9
Rambu Ukur
Rambu ukur ini merupakan suatu barang yang didalamnya terdapat satuan
ukur, biasanya dalam satuan centimeter. Rambu ukur sangat diperlukan dalam
pengukuran, sebab nantinya akan menembak tepat ditengah-tengah rambu ukur ini.
Bahan yang digunakan untuk rambu ukur ini sangat bervariasi tetapi yang
paling umum digunakan adalah kayu atau aluminium, penulisan angka-angkanya
menggunakan warna merah yang berbeda-beda. Hal ini dimaksudkan agar mudah
dalam pembacaannya.
Unting-unting
Unting-unting digunakan untuk menggunakan titik-titik pengamatan secara
akurat dengan menggunakan alat bantunya seperti patok, unting-unting tepat
diletakan dibawah theodolit.
Dan ujung dari unting-unting tersebut dapat menunjukan patok. Hal ini
sangat penting, karena jika ujung unting-unting tersebut tidak mengenai patok, maka
akan menyababkan sudut horizontal yang dihasilkan tidak akan menyebabkan sudut
koreksi yang sangat besar dan ini tidak baik dalam satu pengukuran.
Pembuatan Peta dan Permasalahannya
Permukaan bumi secara keseluyruhan merupakan permukaan yang
melengkung yang tidak mungkin dibentangkan menjadi bidang datar tanpa
mengalami perubahan. Peta marupakan persentasi dari permukaan bumi secara
umum pada suatu bidang datar (dianggap datar) dalam ukuran yang lebih kecil.
Suatu peta dapat dikatakan ideal apabila jarak, luas (bentuk) dan arah objek-
objek yang ada dipeta sama dengan jarak, luas (bentuk) dan arah yang ada
dipermukiaan bumi, keadaan ini sangatlah sulit dipenuhi, kecuali untuk cakupan
daerah pemetan yang relative dianggap suatu bidang datar, itupun dapat dipenuhi
denagn catatan apabila peta tidak disambungkan dengan peta yang lain yang
memuat daerah disekitarnya.
Apabila peta-peta tersebut disambungkan dengan peta-peta yang lain
memuat daerah sekitarnya, maka peta tersebut merupakan bagian dari satu kesatuan
10
peta-peta yang memuat cakupan daerah yang besar dengan permukaan bumi yang
tidak bisa lagi digolongkan sebagai permukaan datar.
Untuk memindahkan keadaan dari permukaan bumi yang tidak beraturan dan
melengkung ke bidang datar, dipermukaan bidang datar perantara dengan cakupan
luasan daerah pemetaan tertentu. Luasan daerah pemetaan dan bidang perantara
yang diambil adalah sebagai berikut :
a) Untuk luas daerah yang lebih besar 5500 km, diambil bidang elipsoda.
b) Untuk luas daerah yang terbesar kurang dari 100 km, diambil bidang datar.
c) Untuk luas daerah yang ukuran terbesarnya kurang dari 55 km, diambil bidang
datar.
Pada cakupan daerah yang tergolong pada bidang datar pemindahan setiap
unsure jarak dari sudut dari permukaan bumi terkadang proyeksi (peta) dapat
dilakukan secara hitungan reduksi keseluruhan. Kegiatan ini dikategorikan sebagai
pekerjaan pemetan pada survey datar / ilmu ukur tanah (land surveing).
PERHITUNGAN
1. Sudut Horizontal, Jarak Optis dan Beda Tinggi
Penentuan posisi adalah salah satu kegiatan untuk merealisasikan tujuan
ilmu geodesi. Posisi setiap titik pada umumnya mempunyai arti relative, karena
posisi titik itu mengacu kepada titik lainnya. Jika titik acuan adalah pusat bumi,
maka posisi yang mengacu kepada pusat bumi ini dapat dinyatakan mempunyai arti
“absolute”. Pengertian “absolute” dalam hal ini dapat juga diartikan sebagai relative,
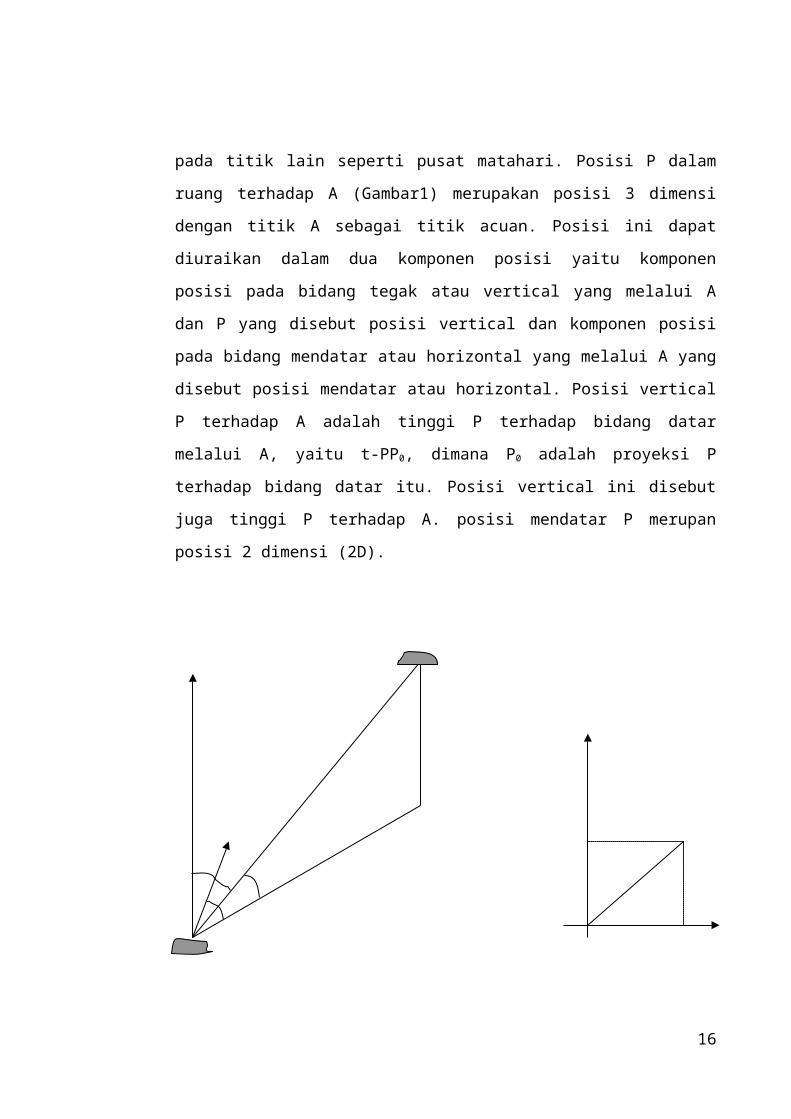
jika posisi pusat bumi masih mengacu pada titik lain seperti pusat matahari. Posisi P
dalam ruang terhadap A (Gambar1) merupakan posisi 3 dimensi dengan titik A
sebagai titik acuan. Posisi ini dapat diuraikan dalam dua komponen posisi yaitu
komponen posisi pada bidang tegak atau vertical yang melalui A dan P yang disebut
posisi vertical dan komponen posisi pada bidang mendatar atau horizontal yang
melalui A yang disebut posisi mendatar atau horizontal. Posisi vertical P terhadap A
adalah tinggi P terhadap bidang datar melalui A, yaitu t-PP0, dimana P0 adalah
11
proyeksi P terhadap bidang datar itu. Posisi vertical ini disebut juga tinggi P
terhadap A. posisi mendatar P merupan posisi 2 dimensi (2D).
Z = sudut zenith
M = sudut miring
T = beda tinggi
D = jarak mendatar
S = jarak langsung
α = sudut jurusan
Dengan mengambil A sebagai kutub posisi mendatar P dapat dinyatakan
dalam koordinat kutub yaitu P (d, α). Dalam koordinat siku-siku dengan mengambil
A sebagai titik asal system koordinat posisi mendatar P dinyatakan dengan P
(Xp,Yp). dalam teknik geodesi, pengukuran yang dilakukan dengan dua alternative:
1) Penentuan posisi mendatar P dilakukan secara terpisah dengan penentuan
tingginya terhadap bidang acuan.
2) Penentuan posisi mendatar P dilakukan secara bersama-sama denga penentuan
tingginya terhadap bidang acuan.
12
Pada alternatif 1) dilakukan pengukuran arah mendatar (α) dan jarak
mendatar (d); maka posisi mendatar P dalam system koordinat siku-siku kemudian
ditentukan dengan menggunakan persamaan:
Xp= d sin α
Yp= d cos α
Apabila jarak A dan P cukup panjang, ini berakibat akan sulit melakukan
pengukuran jarak mendatarnya, apalagi P tidak dapat langsung dapat dilihat dari A.
karena itu diperlukan k buah titik pembantu antara Adan P, sehingga terdapat
sebuah polygon yang menghubungkan A dengan P (gambar 2). Pada polygon
tersebut dilakukan pengukuran sudut mendatar β1 dengan i=1 sampai dengan k1 dan
pengukuran jarak mendatar d1 dengan i=1 sampai dengan k+1. jika arah dari A ke
A1 adalah α1.
Gambar 2. polygon yang menghubungkan A dengan P
Dalam penentuan koordinat-koordinat suatu titik dapat menggunakan
beberapa cara dalam penentuannya yaitu:
a. menentukan koordinat-koordinat suatu titik.
(i) dengan cara menyikat kerangka pada titik yang tentu, yang di ukur adalah
sudut-sudut yang ada di titik pengikut.
(ii) dengan caramengikat ke belakang pada titik yang telah tentu. Yang demikian
adlah sudut-sudut yang berada di titik yang belum tentu.
b. menentukan koordinat-koordinat lebih dari satu titik.
(i) dengan membuat polygon Titik-titik dibuat memanjang dan digabungkan
satu sama lain sehingga berbentuk polygon.
(ii) dengan membuat bentuk-bentuk segitiga titik-titik digabungkan satu sama
lain sehingga berbentuk segitga.
13
Dalam pembuatan polygon. Cara ini digunakan apabila titik-titik yang dicari
koordinat-koordinatnya terletak memanjang sehingga membentuk segi banyak/
polygon yang nantinya akan diukur.
Jadi yang diukur dari polygon adalah:
jarak-jarak d
sudut-sudut polygon s
Untuk penelitian terhadap d dan s perlu diketahui X dan Y di titik awal dan
akhir.
Syarat-syarat yang harus dipenuhi oleh unsure-unsur sudut dan jarak yang di
ukur, harus dicari lebih dahulu untuk memberi koreksi pada sudut-sudut dan pada
bilangan yang bersangkutan dengan jarak-jarak yang di ukur.
Dalam penenuan titik-titik detail dapat dilakukan dengan cara yaitu:
a. dengan cara selisih busur yang sama panjangnya
b. dengan cara selisih absis yang sama panjangnya
c. dengan cara perpanjangan tali busur
d. dengan cara koordinat- koordinat polair
e. dengan cara membuat suatu polygon
2. Azimut
Azimut berfungsi untuk mendapatkan arah sisi terhadap arah utara. Dalam
pengukuran sederhana untuk mengukur azimut awal dan azimut akhir hanya dengan
bantuan petunjuk arah utara. Poligon atau traverse merupakan metode yang
digunakan untuk mengetahui banyak buah titik pengukuran yang dilakukan adalah
semua jarak dan sudut serta 1 buah azimut awal sebagai orientasi (poligon tertutup).
.
3. Detail
Detail adalah segala objek yang ada di lapangan baik yang berifat alamiah
seperti sungai, gunung, lembah bukit, danau dan lain-lain, maupun yang bersifat
bantuan manusia seperti gedung, jembatan, jalan dan lain-lain, yang akan dijadikan
isi dari peta yang akan di buat. Titik detail di pilih untuk mewakili objek unsur
permukaan bumi yang akan di sajikan pada peta. Posisi detail di ikatkan pada titik-
14
titik kerangka pemetaan (poligon utama maupun poligon cabang) terdekat yang
telah di ukur sebelumnya.
4. Metode Pengukuran
Metode pengukuran merupakan metode yang memberikan posisi 3 dimensi
relatif terhadap tempat alit dan kurang teliti.
Setiap titik detail harus dinyatakan informasi :
1. Posisi horizontal titik tersebut
2. Posisi vertikal titik tersebut
3. Keterangan berupa data kualitatif dari titik yang bersangkutan.
Metode pengukuran tttik detail
1. Metode ekstrapolasi
a. Cara koordinat ortogonal (didapatkan hanya posisi x, y)
b. Cara koordinat kutub (didapatkan posisi x, y, z)
2. Cara interpolasi (x,y)
3. Cara pemotongan
Cara ini hanya digunakan pada peta-peta planimetris saja.
5. Pengoreksian Titik
Syarat geometris dari polygon tertutup adalah sebagai berikut :
a. Syarat geometris sudut :
Σß = ( n – 2 ) x 180o ( apabila sudut dalam)
Σß = ( n + 2 ) x 180o ( apabila sudut luar)
b. Syarat absis : Σd sin α = 0
c. Syarat Ordinat : Σd cos α = 0
Pada kenyataannya, dalam setiap pengukuran terdapat kesalahan, akibatnya
pada polygon tertutup terjadi kesalahan sebagai berikut :
a. Kesalahan penutup sudut (fß)
1. Jika menggunakan sudut dalam : Σß = ( n – 2 ) x 180o ± fß
2. Jika mengunakan sudut luar : Σß = ( n + 2 ) x 180o ± fß
15
Kesalahan penutup sudut ini harus dikoreksi sama rata pada sudut hasil ukuran.
Apabila fß tidak habis dibagi, sisa pembagian itu diberikan koreksi tambahan
pada sudut yang mempunyai kaki pendek.
b. Kesalahan penutup absis : ΣJ sin α = 0 ± fx
c. Kesalahan penutup ordinat : ΣJ cos α = 0 ± fy
d. Kesalahan penutup jarak linier polygon (fl)
Kesalahan fx dan fy dibagi ppada absis dan ordinat titik-titik polygon dengan
perbandingan lurus dengan jarak-jarak sisi polygon, dapat dinyatakan sebagai
berikut
dan
Keterangan notasi :
Σ = Jumlah
ß = Sudut
fß = Kesalahan sudut
J = Jarak sisi polygon
α = Azimuth sisi polygon
i = 1,2,3,…..,n
fx = Kesalahan penutup absis
fy = Kesalahan penutup ordinat
fl = Kesalahan jarak linier
Δxi = Kesalahan absis dititik i
Δyi = Kesalahan ordinat dititik i
Secara garis besar tahapan perhitungan polygon tertutup dan terbuka adalah :
1. Hitungan azimuth setiap jurusan secara berangkai.
2. Hitungan selisih atau beda absis dan ordinat setiap sisi.
3. Hitungan koordinat setiap titik secara berangkai.
16
a. Poligon Tertutup
Langkah koordinat tiap titik polygon secara sistematis adalah sebagai berikut :
1. Periksa sudut ukuran, apakah semuanya dalam satu model( Susut dalam atau
sudut luar)
Bila belum satu model, satukan model sudut ukuran tersebut
2. Hitung jumlah sudut ukuran
3. Hitung salah penutup sudut
Syarat Geometrik sudut :
Σß = ( n – 2 ) x 180o ( apabila sudut dalam)
Σß = ( n + 2 ) x 180o ( apabila sudut luar)
4. Hitung koreksi tiap sudut, dengan persamaan
Keterangan :
Kßi = Koreksi untuk sudut i
fB = Kesalahan Penutup sudut
5. Periksa jumlah koreksi sudut dengan persamaan
ΣKß = fß
Keterangan :
ΣKß = Jumlah koreksi sudut
6. Koreksi tiap sudut dengan persamaan
ßi = ßui + Kßi
Keterangan
ßui = sudut ukuran dititik i
7. Hitung azimuth setiap sisi polygon menggunakan sudut yang tekah dikoreksi
dengan persamaan yang benar, yaitu :
Azimuth untuk sudut dalam : α23 = α21 - ßi’ + 180o
Azimuth untuk sudut luar : α23 = α21 - ßi’ - 180o
8. Periksa azimuth akhir hasil hitungan dengan azimuth awal yang diketahui.
9. Hitung d cos α = fx dan d sin α = fy
10. Kesalahan fx dan fy (kesalahan absis dan kesalahan ordinat)
a. ΣJ sin α = fx
17
b ΣJ cos α = fy
11.Kesalahan absis dan ordinat tiap titik polygon dengan menggunakan
persamaan berikut :
a. Koreksi absis
b. Koreksi ordinat
b. Poligon Terikat sempurna
Pengoreksian polygon terbuka terikat sempurna sama dengan pengoreksian
polygon tertutup.
Syarat geometris pada polygon terbuka terikat sempurna :
1. Syarat sudut : Σß = αakhir- αawal + n x 180o
2. Syarat absis : ΣJsin α = Xawal – Xakhir
3. Syarat Ordinat : ΣJcos α = Xawal – Xakhir
1. Koreksi tiap sudut polygon
2. Koreksi tiap sudut dengan persamaan
ßi = ßui + Kßi
3. Azimuth tiap sisi polygon
Azimuth untuk sudut kanan : αjk = αij - ßi + 180o
Azimuth untuk sudut kiri : αjk = αij - ßi - 180o
4. Koreksi absis dan ordinat
a. Koreksi absis
b. Koreksi absis
6. Plotting
18
Plotting adalah penggambaran dari data lapangan ataupun hasil pengolahan
data. Tujuannya adalah menggambarkan seluruh daerah yang diukur dapat
diwujudkan dalam bentuk peta.
Plotting dilakukan setelah semua data dilapangan dihitung, yang meliputi
hitungan koordinat (X,Y) titik kerangka pemetaan (Poligon), Perhitungan
ketinggian titik-titik polygon dari pengukuran sifat datar
Adapun garis besar langkah-langkah plotting adalah sebagai berikut :
a. Plotting tititk-titik kerangka pemetaan(X,Y,Z) dengan skala yang sudah
ditentukan
b. Plotting detail (arah, jarak mendatar dan beda tinggi)
c. Penarikan garis Kontur.
Ploting titik kerangka pemetaan menggunakan metode numeris, yaitu
merupakan plotting berdasarkan garis-garis tertentu yang dikenal dengan
Garis grid adalah tempat kedudukan titik dengan absis dan ordinat yang sama.
Garis grid sejajar dengan sumbu x atau sumbu y
Jika ploting dilakukan diatas kertas gambar polos maka terlebih dahulu jala-
jala (grid) dengan jarak setiap grid adalah 10, sehingga seluruh permukaan kertas
dipenuhi oleh grid.
Penarikan garis mempunyai kekuatan sebagai beriku:
Garis grid mempunyai besaran sesuai dengan jarak garis (interval grid)
Besaran garis grid tergantung interval grid, skala, peta berasal dari besaran
atau nilai 0,00 m
Sebagai contoh:
Untuk peta skala 1: 5000 dengan interval grid 10 cm, maka garis grid yang akan
digambarkan pada nilai nilai....:-15000,…:-14500.
Bila nilai grid telah ditentukan, maka di pilih/ dicari garis grid yang menjadi
batas bagi seluruh daerah pemetaan. Titik kerangka dasar plot berdasarkan garis grid
yang mendekat dengan koordinatnya, dengan memperhatikan:
Besaran garis grid
Koordinat titik tersebut
Skala peta
19
Jarak dari titik sampai garis grid terdekat:
Keterangan, notasi
Xa , Ya : Koordinat titik obyek ploting
Xo, Yo : Koordinat garis grid (nilai garis grid)
dx, dy : Jarak dari garis pada peta
SNG : Selang nilai garis grid
IG : Interval grid (misal 10cm)
Kemudian agar letak gambar simetris pada kertas tersebut, maka perhatikan
angka absis dan ordinat maximum dan minimu. Cari panjang gambar arah sumbu x
dan y, lalu bagi dua sehingga posisi absis dan ordinat tengah kertas gambar diberi
angka sebesar:
Angka absis : Harga absis minimum +1/2 panjang gambar pada arah sumbu x
Angka ordinat : Harga absis minimum +1/2 panjang gambar pada arah sumbu y
Harga ordinat maximum = +5000m dan minimum =+4000m, maka panjang
dalam sumbu y adalah 100-400 = 600m, sehingga setengah panjang gambar adalah
300m di tengah kertas plot kita diberi harga absis sebesar 400+300=700m sehingga
pusat kertas koordinatnya adalah(+150+700)m.
Setelah didapatkan pusat koordinat kertas, baru di plotkan posisi setiap titik
poligon sesuai dengan absis dan ordinat serta skala yang ditentukan, dengan
menggunakan mistar skala di ukur dari titik jala grid yang terdekat. Titik hasil plot
diberi identitas sesuai dengan nomornya dilapangan, sedangkan angka ketinggian
dituliskan disebelahnya.
Harga absis maximum +500m, dan minimum -200, maka panjang dalam
sumbu x adalah 500-(-200)=700m, sehingga setengah panjang gambar adalah 350m.
F. METEDOLOGI PERCOBAAN
20
1. Alat dan Bahan
1.1. Alat
– Teodolit
– Statif
– Kompas Suunto
– Rambu Ukur
– Pita Ukur / Meteran
1.2. Bahan
– Patok
– Paku Payung
– Alat Tulis
– Payung
– Baterai AA
– Formulir Ukuran Sudut
2. Cara kerja
- Dilakukan orientsi lapangan, untuk menntukan jumlah titik krangka dasar,
gambarkan sketsanya.
- Dilakukan pemasangan patok untuk daerah – daerah yang telah ditentukan.
- Alat ukur theodolit didirikan diatas titik A, lalu dibuat sentering. Kemudian
sumbu satu dibuat vertical.
- Ditentukan azimuth magnetis dari arah utara ke titik belakang
- Pada pengukuran sudut horizontal, biasanya yang diukur adalah sudut dalam.
Untuk mendapatkan sudut dalam, maka bacaan horizontal harus terlebih
dahulu disetel menjadi HL dengan cara tombol R/L dipijit pada layer.
- Pembacaan horizontal disetel pada layer menjadi HL dengan memijit tombol
R/L.
- Untuk perhitungan dipermudah, pembacaan lingkaran horizontal disetel
menjadi 0o0’0”, kemudian klem pembacaan horizontal tersebut dengan
menggunakan klem limbus atau dengan dipijit tombol hold. Pembacaan
21
horizontal diklem dengan tujuan supaya bacaaan horizontal tidak berubah
saat theodolit diputar terhadap sumbu A.
- Dengan teropong theodolit dalam keadaan biasa, teropong diarahkan ke
target di titik BM (patok belakang). Jika patok dan pakunya tidak tampak,
yang diamati benang unting-untingnya. Untuk benang diafragma ditepatkan
ke paku atau ke benang unting-untingnya, digunakan sekrup penggerak halus
alhidade horizontal maupun vertical. Pada saat sekrup gerak halus di
gerakkan, semua klem pengunci theodolit dikencangkan.
- Pembacaan arah horizontal, vertical Ba, Bt dan Bb ke 1 dicatat pada
formulir.
- Pada pengukuran luar biasa Theodolit diputar 1800 arah horizontal dan
vertical
- Lalu dilakukan seperti langkah diatas
- Lalu diarahkan theodolite pada patok depan ( selanjutnya ) lalu lakukan
langkah seperti diatas. dan seterusnya sampai patok terakahir lalu diplotkan
di kalkir.
G. HASIL DAN PEMBAHASAN
22
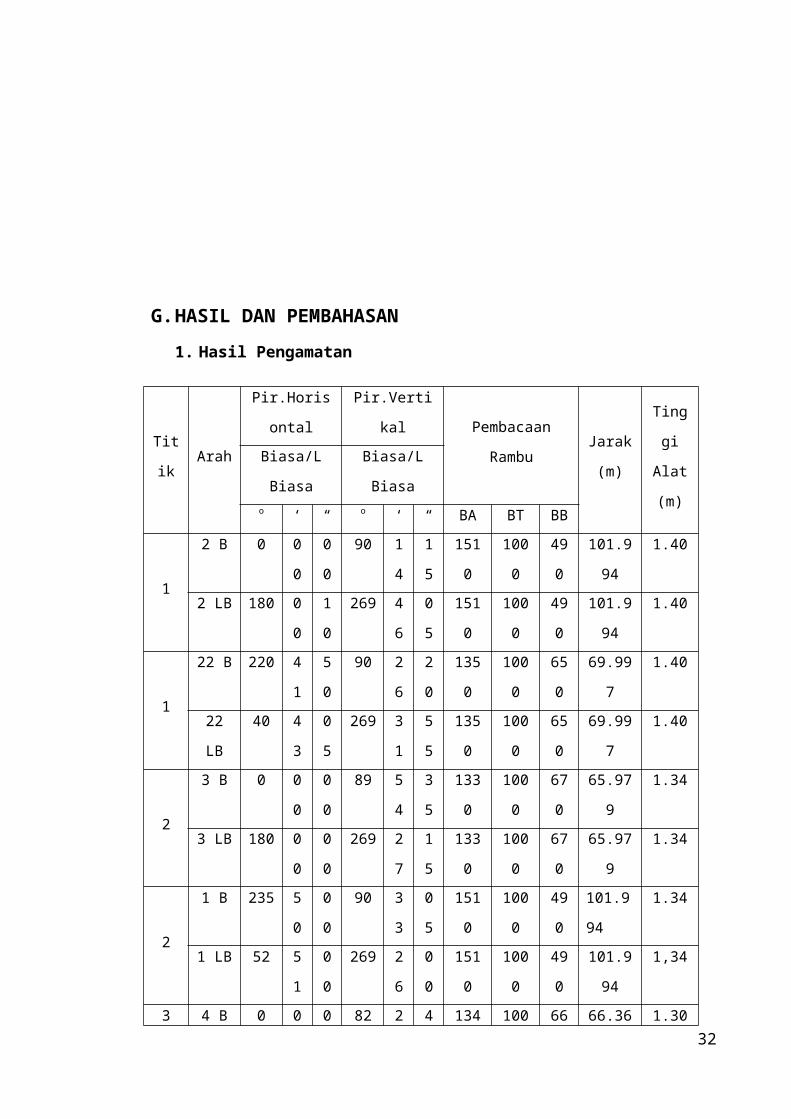
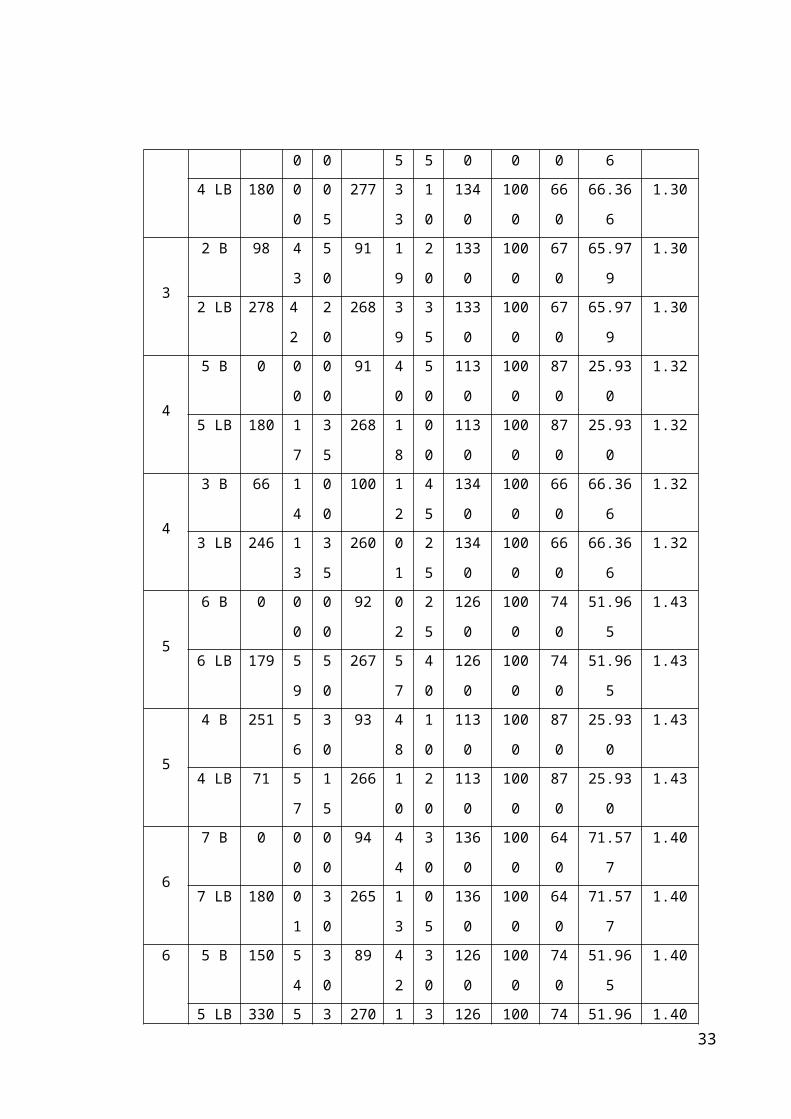
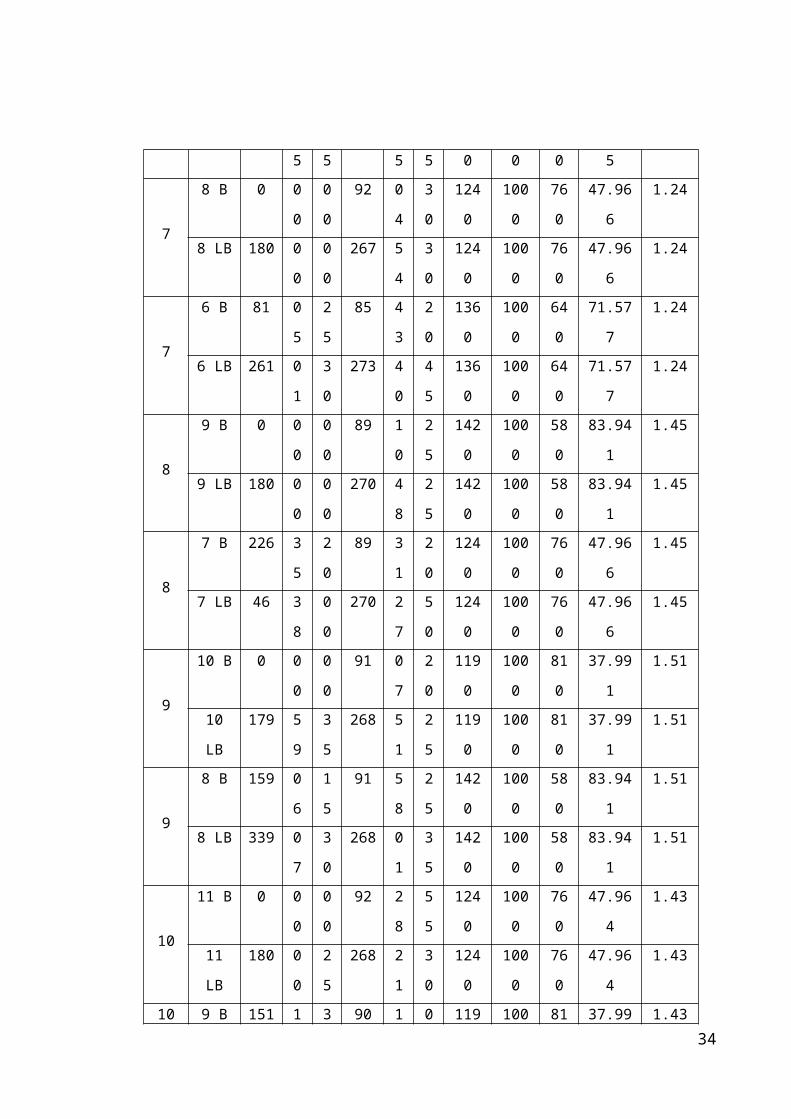
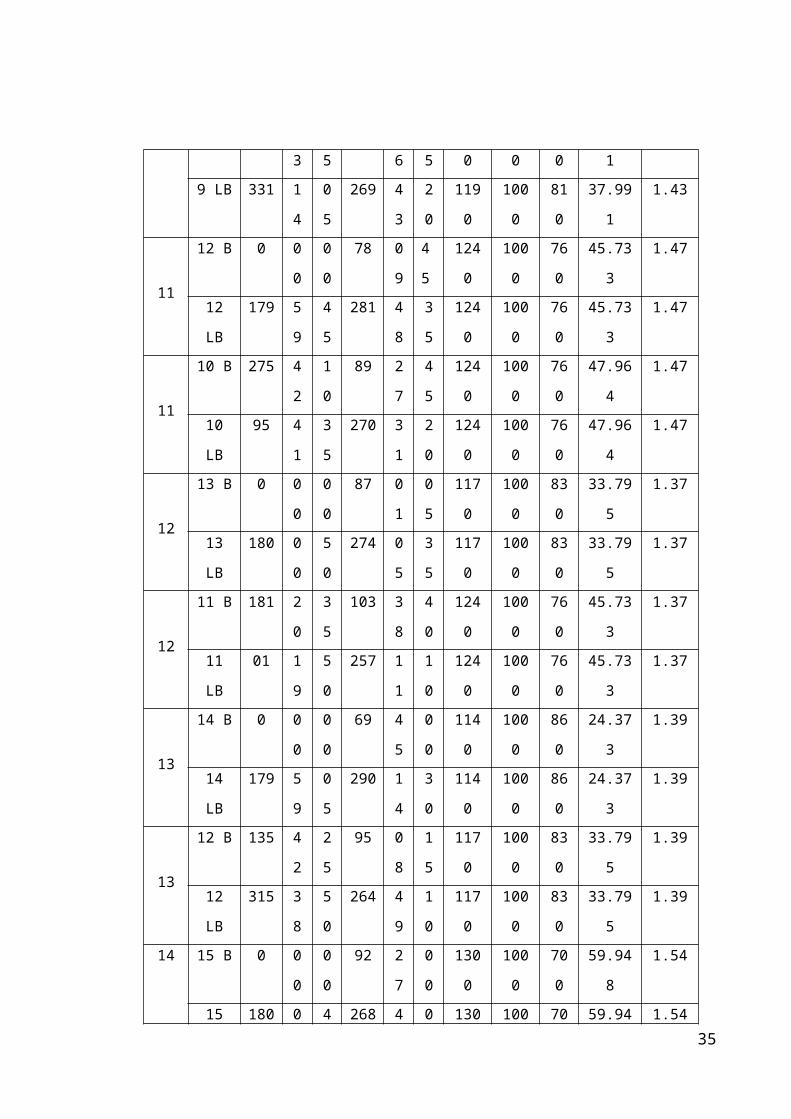
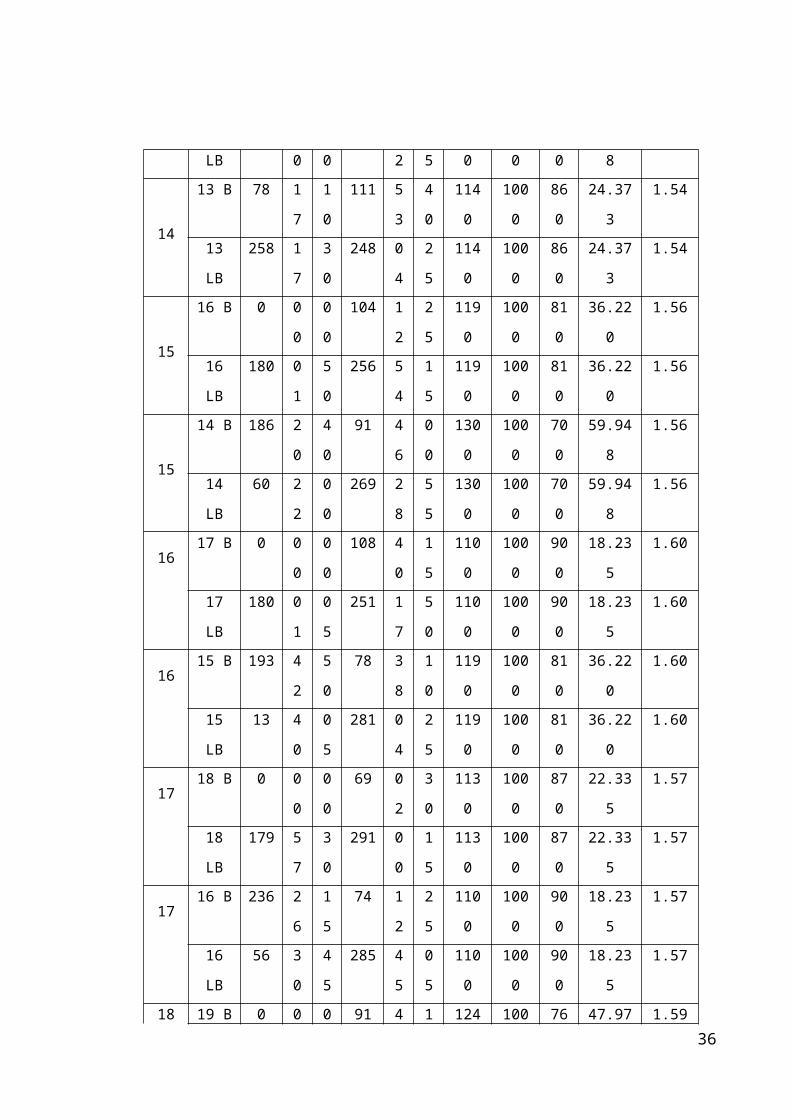
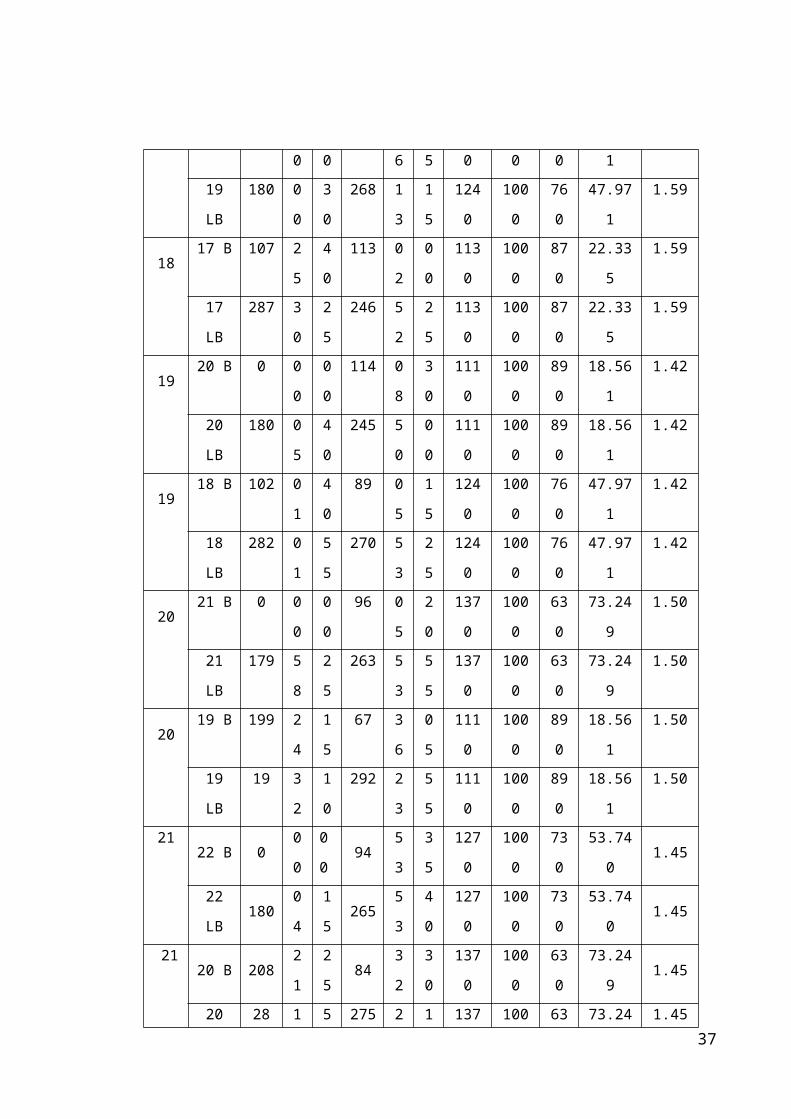
1. Hasil Pengamatan
Titik Arah
Pir.Horisontal Pir.VertikalPembacaan Rambu Jarak
(m)
Tinggi
Alat
(m)Biasa/L Biasa Biasa/L Biasa
o ‘ “ o ‘ “ BA BT BB
12 B 0 00 00 90 14 15 1510 1000 490 101.994 1.40
2 LB 180 00 10 269 46 05 1510 1000 490 101.994 1.40
122 B 220 41 50 90 26 20 1350 1000 650 69.997 1.40
22 LB 40 43 05 269 31 55 1350 1000 650 69.997 1.40
23 B 0 00 00 89 54 35 1330 1000 670 65.979 1.34
3 LB 180 00 00 269 27 15 1330 1000 670 65.979 1.34
21 B 235 50 00 90 33 05 1510 1000 490 101.994 1.34
1 LB 52 51 00 269 26 00 1510 1000 490 101.994 1,34
34 B 0 00 00 82 25 45 1340 1000 660 66.366 1.30
4 LB 180 00 05 277 33 10 1340 1000 660 66.366 1.30
32 B 98 43 50 91 19 20 1330 1000 670 65.979 1.30
2 LB 278 42 20 268 39 35 1330 1000 670 65.979 1.30
45 B 0 00 00 91 40 50 1130 1000 870 25.930 1.32
5 LB 180 17 35 268 18 00 1130 1000 870 25.930 1.32
43 B 66 14 00 100 12 45 1340 1000 660 66.366 1.32
3 LB 246 13 35 260 01 25 1340 1000 660 66.366 1.32
56 B 0 00 00 92 02 25 1260 1000 740 51.965 1.43
6 LB 179 59 50 267 57 40 1260 1000 740 51.965 1.43
54 B 251 56 30 93 48 10 1130 1000 870 25.930 1.43
4 LB 71 57 15 266 10 20 1130 1000 870 25.930 1.43
67 B 0 00 00 94 44 30 1360 1000 640 71.577 1.40
7 LB 180 01 30 265 13 05 1360 1000 640 71.577 1.40
65 B 150 54 30 89 42 30 1260 1000 740 51.965 1.40
5 LB 330 55 35 270 15 35 1260 1000 740 51.965 1.40
78 B 0 00 00 92 04 30 1240 1000 760 47.966 1.24
8 LB 180 00 00 267 54 30 1240 1000 760 47.966 1.24
76 B 81 05 25 85 43 20 1360 1000 640 71.577 1.24
6 LB 261 01 30 273 40 45 1360 1000 640 71.577 1.24
8 9 B 0 00 00 89 10 25 1420 1000 580 83.941 1.45
23
9 LB 180 00 00 270 48 25 1420 1000 580 83.941 1.45
87 B 226 35 20 89 31 20 1240 1000 760 47.966 1.45
7 LB 46 38 00 270 27 50 1240 1000 760 47.966 1.45
910 B 0 00 00 91 07 20 1190 1000 810 37.991 1.51
10 LB 179 59 35 268 51 25 1190 1000 810 37.991 1.51
98 B 159 06 15 91 58 25 1420 1000 580 83.941 1.51
8 LB 339 07 30 268 01 35 1420 1000 580 83.941 1.51
1011 B 0 00 00 92 28 55 1240 1000 760 47.964 1.43
11 LB 180 00 25 268 21 30 1240 1000 760 47.964 1.43
109 B 151 13 35 90 16 05 1190 1000 810 37.991 1.43
9 LB 331 14 05 269 43 20 1190 1000 810 37.991 1.43
1112 B 0 00 00 78 09 45 1240 1000 760 45.733 1.47
12 LB 179 59 45 281 48 35 1240 1000 760 45.733 1.47
1110 B 275 42 10 89 27 45 1240 1000 760 47.964 1.47
10 LB 95 41 35 270 31 20 1240 1000 760 47.964 1.47
1213 B 0 00 00 87 01 05 1170 1000 830 33.795 1.37
13 LB 180 00 50 274 05 35 1170 1000 830 33.795 1.37
1211 B 181 20 35 103 38 40 1240 1000 760 45.733 1.37
11 LB 01 19 50 257 11 10 1240 1000 760 45.733 1.37
1314 B 0 00 00 69 45 00 1140 1000 860 24.373 1.39
14 LB 179 59 05 290 14 30 1140 1000 860 24.373 1.39
1312 B 135 42 25 95 08 15 1170 1000 830 33.795 1.39
12 LB 315 38 50 264 49 10 1170 1000 830 33.795 1.39
1415 B 0 00 00 92 27 00 1300 1000 700 59.948 1.54
15 LB 180 00 40 268 42 05 1300 1000 700 59.948 1.54
1413 B 78 17 10 111 53 40 1140 1000 860 24.373 1.54
13 LB 258 17 30 248 04 25 1140 1000 860 24.373 1.54
1516 B 0 00 00 104 12 25 1190 1000 810 36.220 1.56
16 LB 180 01 50 256 54 15 1190 1000 810 36.220 1.56
1514 B 186 20 40 91 46 00 1300 1000 700 59.948 1.56
14 LB 60 22 00 269 28 55 1300 1000 700 59.948 1.56
16 17 B 0 00 00 108 40 15 1100 1000 900 18.235 1.60
17 LB 180 01 05 251 17 50 1100 1000 900 18.235 1.60
24
16 15 B 193 42 50 78 38 10 1190 1000 810 36.220 1.60
15 LB 13 40 05 281 04 25 1190 1000 810 36.220 1.60
17 18 B 0 00 00 69 02 30 1130 1000 870 22.335 1.57
18 LB 179 57 30 291 00 15 1130 1000 870 22.335 1.57
17 16 B 236 26 15 74 12 25 1100 1000 900 18.235 1.57
16 LB 56 30 45 285 45 05 1100 1000 900 18.235 1.57
18 19 B 0 00 00 91 46 15 1240 1000 760 47.971 1.59
19 LB 180 00 30 268 13 15 1240 1000 760 47.971 1.59
18 17 B 107 25 40 113 02 00 1130 1000 870 22.335 1.59
17 LB 287 30 25 246 52 25 1130 1000 870 22.335 1.59
19 20 B 0 00 00 114 08 30 1110 1000 890 18.561 1.42
20 LB 180 05 40 245 50 00 1110 1000 890 18.561 1.42
19 18 B 102 01 40 89 05 15 1240 1000 760 47.971 1.42
18 LB 282 01 55 270 53 25 1240 1000 760 47.971 1.42
20 21 B 0 00 00 96 05 20 1370 1000 630 73.249 1.50
21 LB 179 58 25 263 53 55 1370 1000 630 73.249 1.50
20 19 B 199 24 15 67 36 05 1110 1000 890 18.561 1.50
19 LB 19 32 10 292 23 55 1110 1000 890 18.561 1.50
21 22 B 0 00 00 94 53 35 1270 1000 730 53.740 1.45
22 LB 180 04 15 265 53 40 1270 1000 730 53.740 1.45
21 20 B 208 21 25 84 32 30 1370 1000 630 73.249 1.45
20 LB 28 18 55 275 26 15 1370 1000 630 73.249 1.45
22 1 B 0 00 00 90 04 00 1290 1000 710 69.997 1.37
1 LB 179 59 10 269 55 25 1270 1000 710 69.997 1.37
22 21 B 43 41 45 86 38 10 1270 1000 730 53.740 1.37
21 LB 223 44 40 273 20 55 1270 1000 730 53.740 1.37
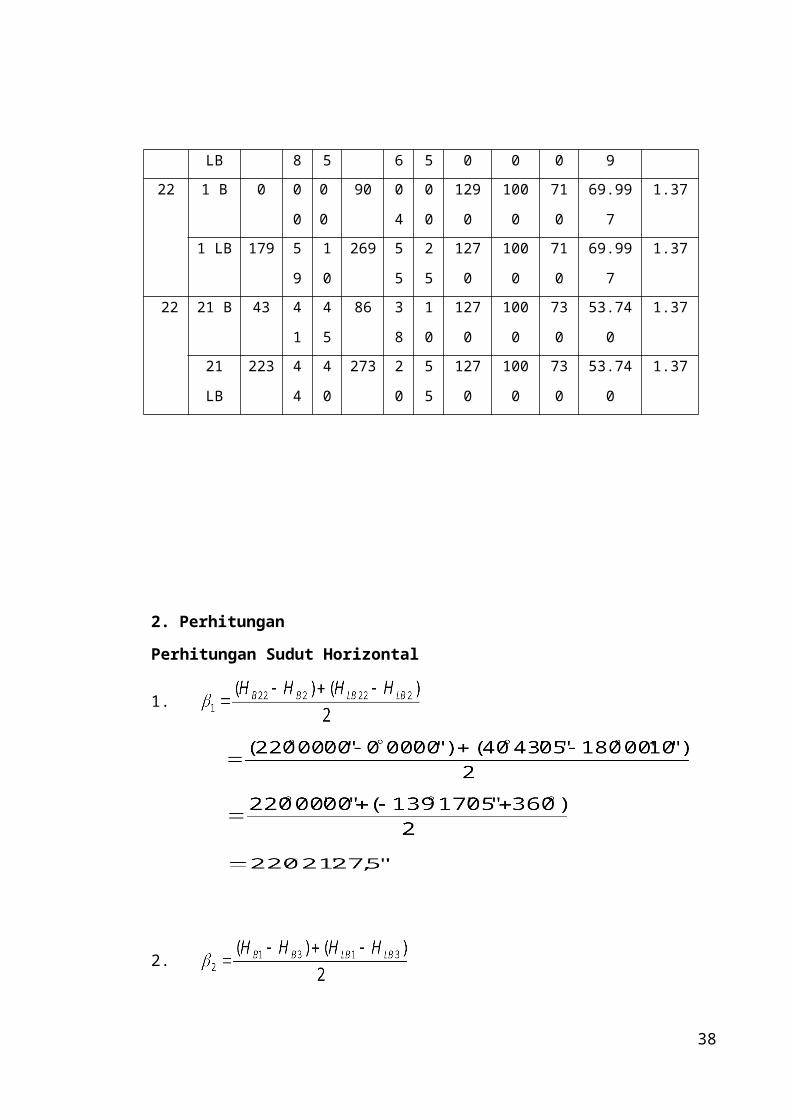
2. Perhitungan
25
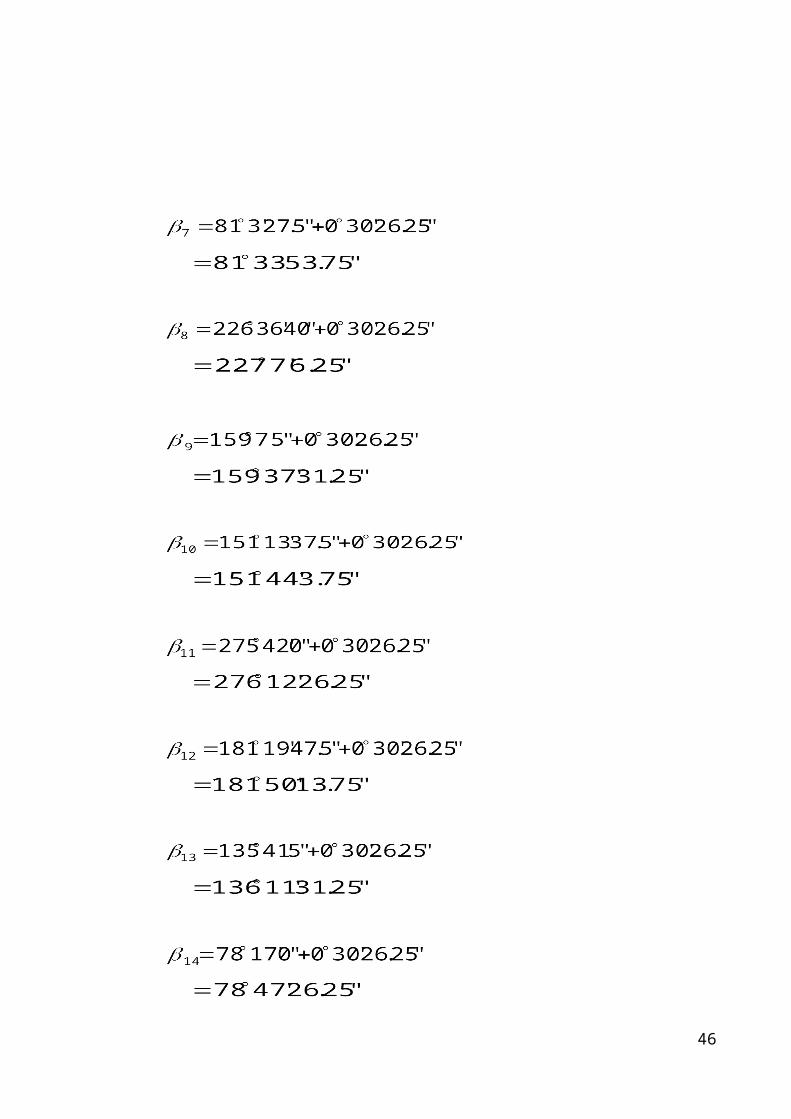
Perhitungan Sudut Horizontal
1.
2.
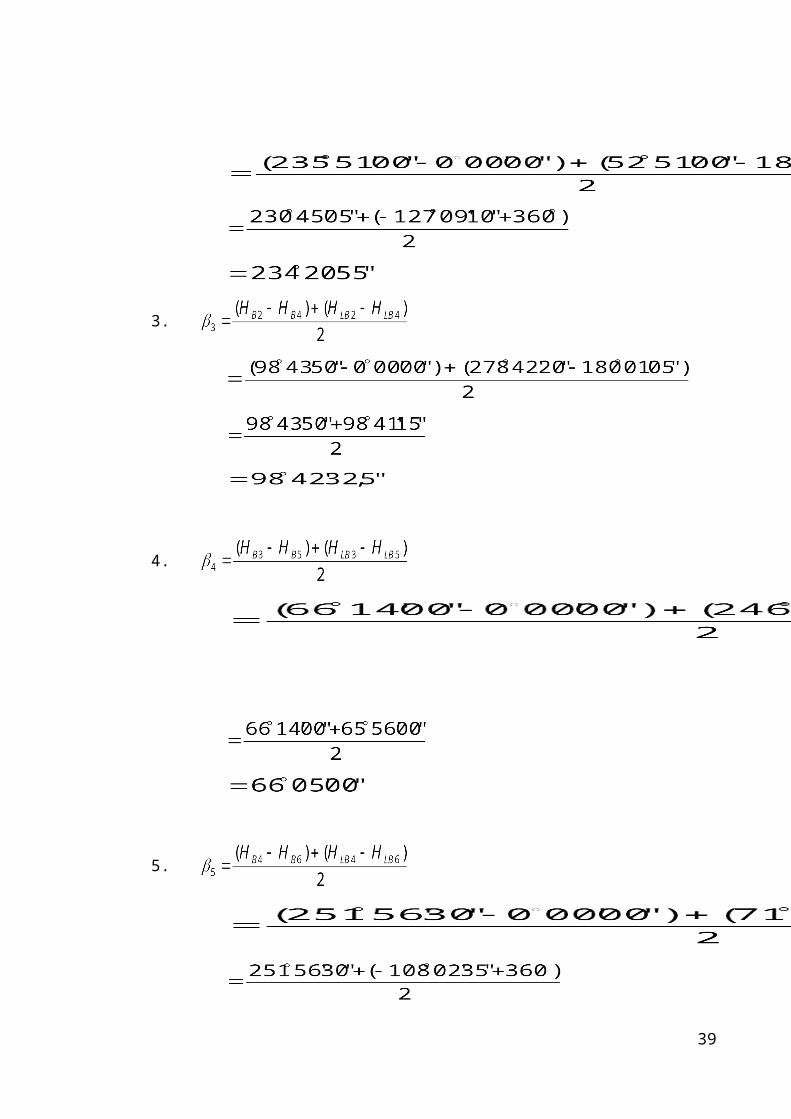
3.
4.
26
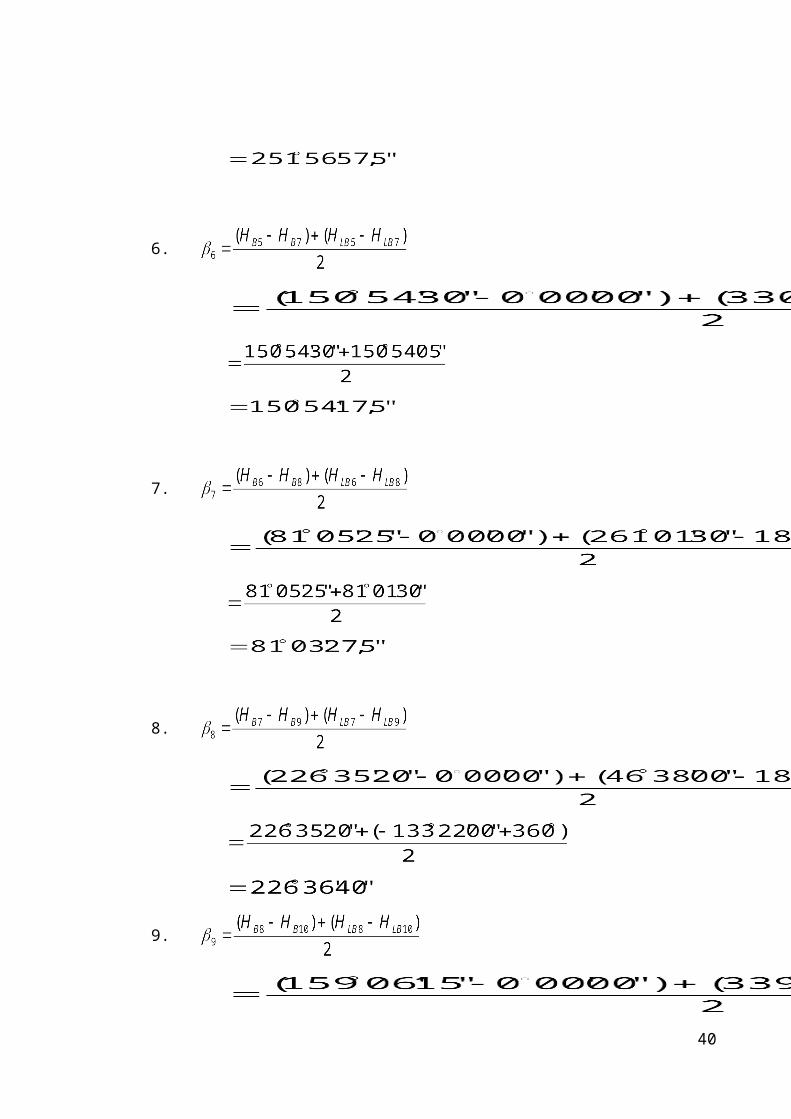
5.
6.
7.
8.
9.
27
10.
11.
12.
13.
28
14.
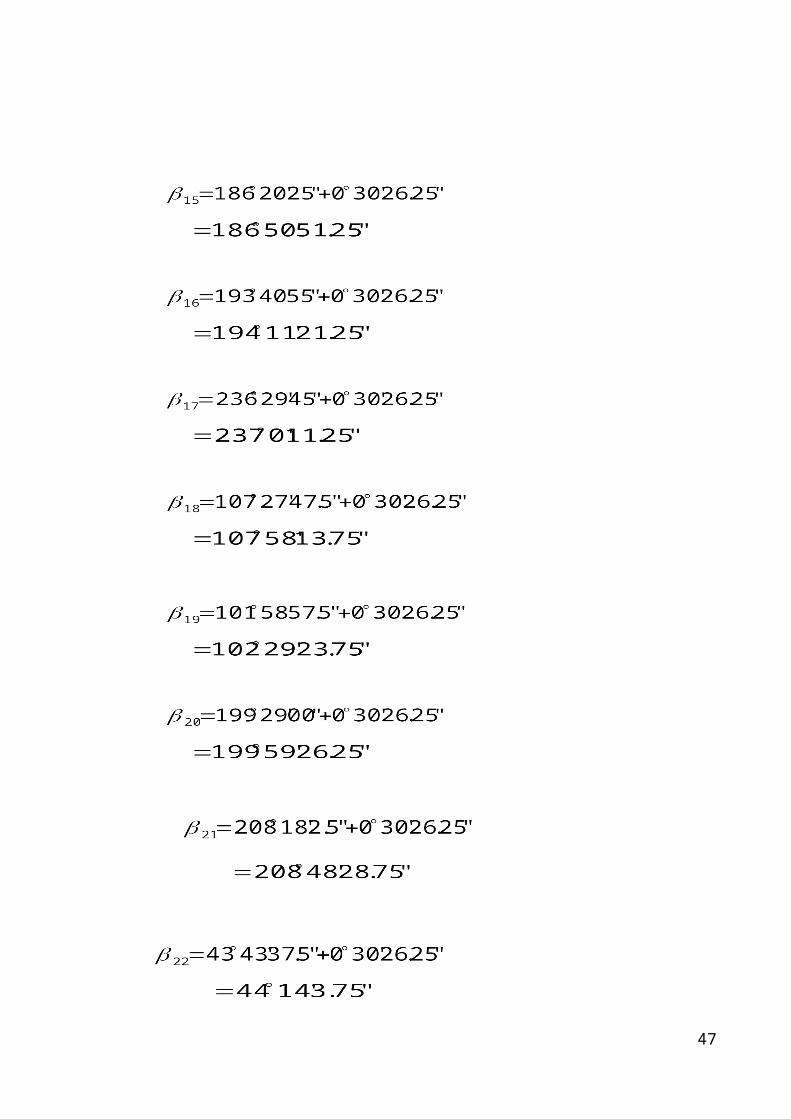
15.
16.
17.
29
18.
19.
20.
21.
30
22.
Pengoreksian
Syarat jumlah sudut ( ∑β ) = ( n - 2 ) x 180○
= ( 22 - 2 ) x 180○
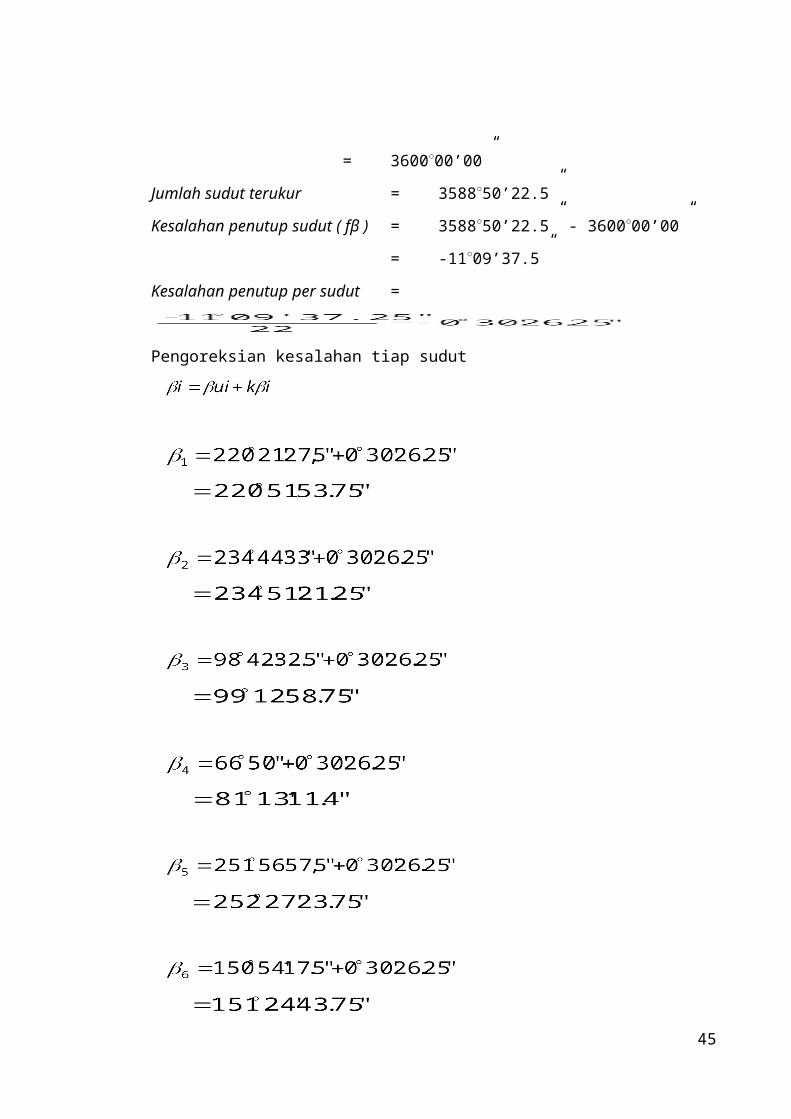
= 3600○00’00”
Jumlah sudut terukur = 3588○50’22.5”
Kesalahan penutup sudut ( fβ ) = 3588○50’22.5” - 3600○00’00”
= -11○09’37.5”
Kesalahan penutup per sudut =
Pengoreksian kesalahan tiap sudut
31
32
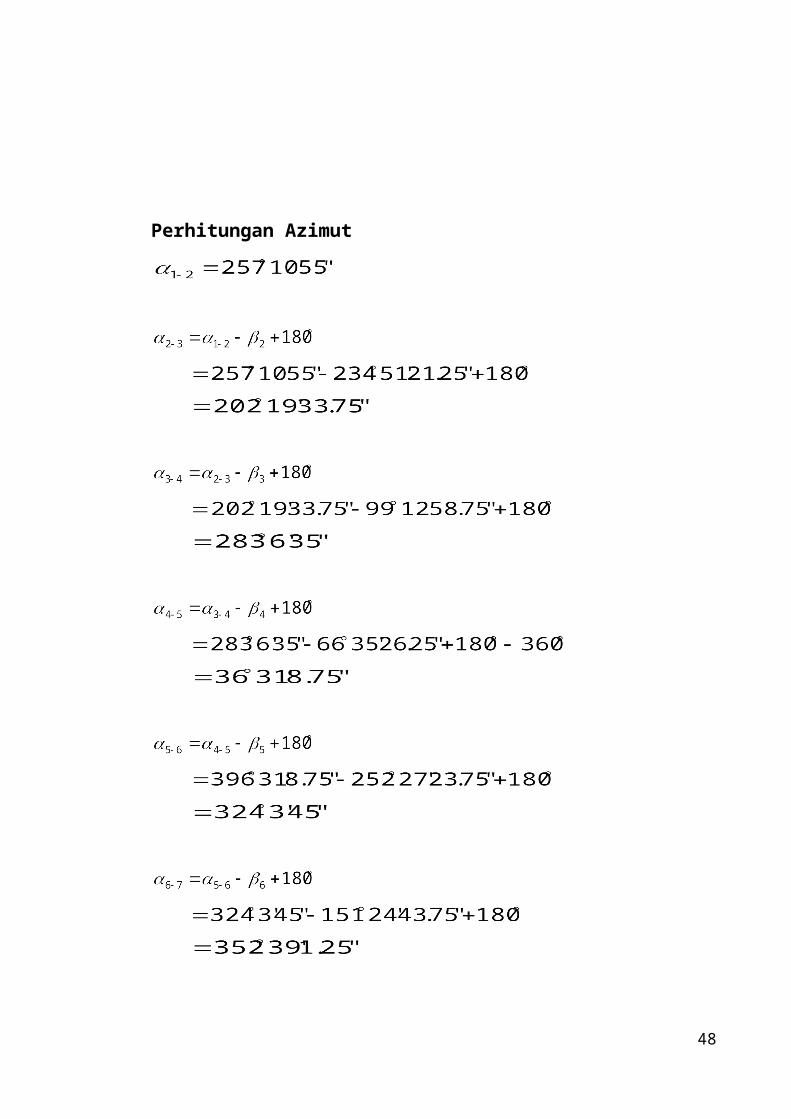
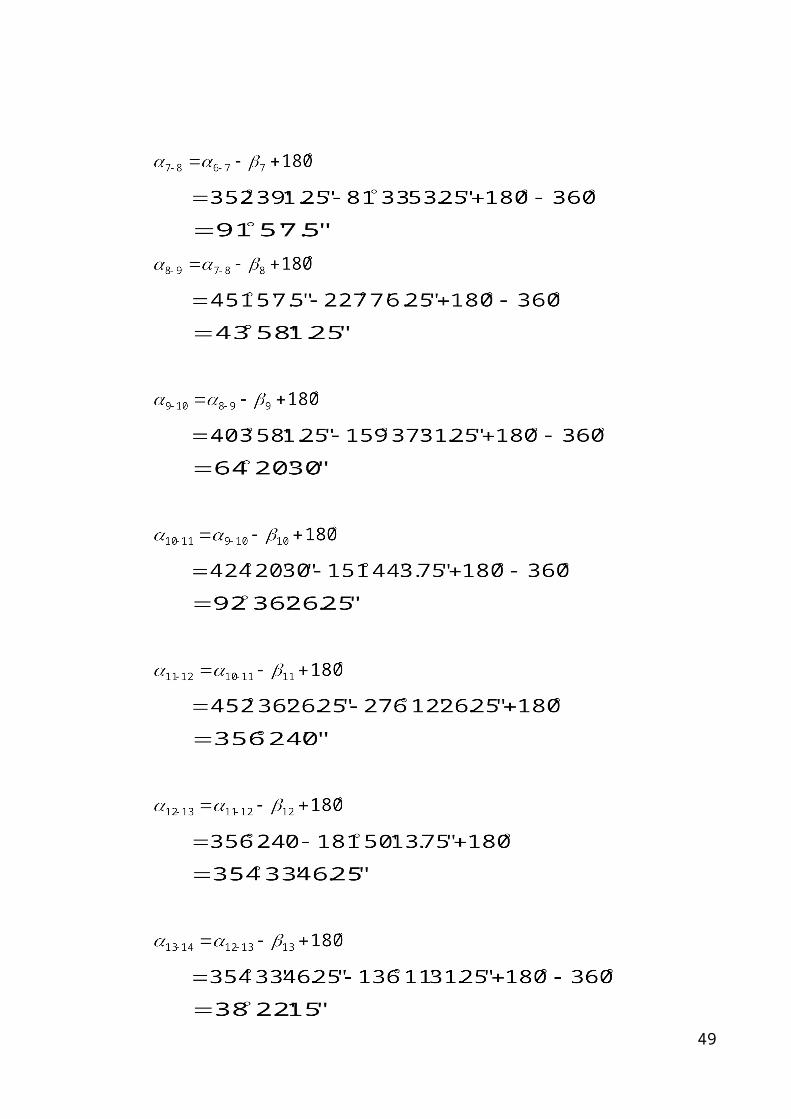
Perhitungan Azimut
33
34
35
1802020192120
"25.21'5191
1802121202221
360180"75.3'1444"75.18'47522
"15'33298
Perhitungan jarak
1. Patok 1
J1-2 biasa = 100 ( ba – bb ) sin2z
= 100 ( 1510 – 490 ) sin2( 90o14’15” )
= 101,998 m
J1-2 luar biasa = 100 ( ba – bb ) sin2z
= 100 ( 1510 – 490 ) sin2( 269o46’05” )
= 101,998 m
J1-2 rata-rata =
36
= 101,998 m
J1-22 biasa = 100 ( 1350 – 650 ) sin2( 90o26’20” )
= 69,995 m
J1-22 luar biasa = 100 ( 1350 – 650 ) sin2( 269o31’55” )
= 69,995 m
J1-22 rata-rata =
= 69,995 m
2. Patok 2
J2-3 biasa = 100 ( 1130 – 670 ) sin2 ( 89054’35” )
= 65,999 m
J2-3 luar biasa = 100 ( 1130 – 670 ) sin2( 269027’15”)
= 65,994 m
J2-3 rata-rata =
= 65,996 m
J2-1 biasa = 100 ( 1510 – 490 ) sin2( 90o33’05” )
= 101,990 m
J2-3 luar biasa = 100 ( 1510 – 490 ) sin2( 269o26’00” )
= 101,990 m
J2-3 rata-rata =
= 101,990 m
3. Patok 3
J3-4 biasa = 100 ( 1340 – 660 ) sin2( 82o25’45” )
= 66,819 m
J3-4 luar biasa = 100 ( 1340 – 660 ) sin2( 277o33’10” )
= 66,825 m
37
J3-4 rata-rata =
= 66.822 m
J3-2 biasa = 100 ( 1330 – 670 ) sin2( 91o19’20” )
= 65.964 m
J3-2 luar biasa = 100 ( 1330 – 670 ) sin2( 268o39’35” )
= 65.963 m
J3-2 rata-rata =
= 65.963 m
4. Patok 4
J4-5 biasa = 100 ( 1130 – 870 ) sin2( 91o40’50” )
= 25,977 m
J4-5 luar biasa = 100 ( 1130 – 870 ) sin2( 268o18’00” )
= 25,977 m
J4-5 rata-rata =
= 25,977 m
J4-3 biasa = 100 ( 1340 – 660 ) sin2( 100o12’45” )
= 65,862 m
J4-3 luar biasa = 100 ( 1340 – 660 ) sin2( 260o01’25” )
= 65,959 m
J4-3 rata-rata =
= 65,910 m
5. Patok 5
J5-6 biasa = 100 ( 1260 – 740 ) sin2( 92o02’65” )
= 51,934 m
38
J5-6 luar biasa = 100 ( 1260 – 740 ) sin2( 267o54’40” )
= 51,930 m
J5-6 rata-rata =
= 51,932 m
J5-4 biasa = 100 ( 1330 – 870 ) sin2( 93o48’10” )
= 25,885 m
J5-4 luar biasa = 100 ( 1330 – 870 ) sin2( 266o10’20” )
= 25,884 m
J5-4 rata-rata =
= 25,884 m
6. Patok 6
J6-7 biasa = 100 ( 1360 – 640 ) sin2( 94o44’30” )
= 71,508 m
J6-7 luar biasa = 100 ( 1360 – 640 ) sin2( 265o13’05” )
= 71,499 m
J6-7 rata-rata =
= 71,503 m
J6-5 biasa = 100 ( 1260 – 740 ) sin2( 89o42’30” )
= 51,998 m
J6-5 luar biasa = 100 ( 1260 – 740 ) sin2( 270o15’35” )
= 51,998 m
J6-5 rata-rata = 2
51,99851,998
= 51,998 m
7. Patok 7
39
J7-8 biasa = 100 ( 1240 – 760 ) sin2( 92o04’30” )
= 47,937 m
J7-8 luar biasa = 100 ( 1240 – 760 ) sin2( 267o54’30” )
= 47,936 m
J7-8 rata-rata =
= 47,936 m
J7-6 biasa = 100 ( 1360 – 640 ) sin2( 85o43’20” )
= 71,599 m
J7-6 luar biasa = 100 ( 1360 – 640 ) sin2( 273o40’45” )
= 71,703 m
J7-6 rata-rata =
= 71,651 m
8. Patok 8
J8-9 biasa = 100 ( 1240 – 580 ) sin2( 89o10’25” )
= 83,982 m
J8-9 luar biasa = 100 ( 1240 – 580 ) sin2( 270o48’25” )
= 83,983 m
J8-9 rata-rata =
= 83,983 m
J8-7 biasa = 100 ( 1240 – 760 ) sin2( 89o31’20” )
= 47,996 m
J8-7 luar biasa = 100 ( 1240 – 760 ) sin2( 270o27’50” )
= 47,996 m
J8-7 rata-rata =
= 47,996 m
40
9. Patok 9
J9-8 biasa = 100 ( 1420 – 580 ) sin2( 91o58’25” )
= 83,900 m
J9-8 luar biasa = 100 ( 1420 – 580 ) sin2( 268o01’35” )
= 83,900 m
J9-8 rata-rata = 2
83,900 83,900
= 83,900 m
J9-10 biasa = 100 ( 1190 – 810 ) sin2( 91o07’20” )
= 37,985 m
J9-10 luar biasa = 100 ( 1190 – 810 ) sin2( 268o51’25” )
= 37,984 m
J9-10 rata-rata = 2
984,37 37,985
= 37,984 m
10. Patok 10
J10-11 biasa = 100 ( 1240 – 760 ) sin2( 92o28’55” )
= 47,909 m
J10-11 luar biasa = 100 ( 1240 – 760 ) sin2( 268o21’30” )
= 9.999 m
J10-11 rata-rata = 2
47,960 47,909
= 47,934 m
J10-9 biasa = 100 ( 1190 – 810 ) sin2( 90o16’05” )
= 37,999 m
J10-9 luar biasa = 100 ( 1190 – 810 ) sin2( 269o43’20” )
= 37,999 m
J10-9 rata-rata = 2
37,999 37,999
= 37,999 m
41

11. Patok 11
J11-12 biasa = 100 ( 1240 – 760 ) sin2( 78o09’45” )
= 45,980 m
J11-12 luar biasa = 100 ( 1240 – 760 ) sin2( 281o48’35” )
= 45,989 m
J11-12 rata-rata = 2
45,98945,980
= 45,9845 m
J11-10 biasa = 100 ( 1240 – 760 ) sin2( 89o27’45” )
= 47,996 m
J11-10 luar biasa = 100 ( 1240 – 760 ) sin2( 270o31’20” )
= 47,9955 m
J11-10 rata-rata = 2
47,99647,996
= 47,9955 m
12. Patok 12
J12-13 biasa = 100 ( 1170 – 830 ) sin2( 87o01’05” )
= 33,907 m
J12-13 luar biasa = 100 ( 1170 – 830 ) sin2( 274o05’35” )
= 33,826 m
J12-13 rata-rata = 2
33,82633,907
= 33,8665 m
J12-11 biasa = 100 ( 1240 – 760 ) sin2( 103o38’40” )
= 45,328 m
J12-11 luar biasa = 100 ( 1240 – 760 ) sin2( 257o11’10” )
= 45,638 m
J12-11 rata-rata = 2
45,63845,328
= 45,483 m
42
13. Patok 13
J13-14 biasa = 100 ( 1140 – 860 ) sin2( 69o45’00” )
= 24,645 m
J13-14 luar biasa = 100 ( 1140 – 860 ) sin2( 290o14’30” )
= 24,648 m
J13-14 rata-rata = 2
24,64824,645
= 24,6465 m
J13-12 biasa = 100 ( 1170 – 830 ) sin2( 95o08’15” )
= 33,727 m
J13-12 luar biasa = 100 ( 1170 – 830 ) sin2( 264o49’10” )
= 33,722 m
J13-12 rata-rata = 2
33,72233,727
= 33,7245 m
14. Patok 14
J14-15 biasa = 100 ( 1170 – 830 ) sin2( 92o27’00” )
= 59,890 m
J14-15 luar biasa = 100 ( 1170 – 830 ) sin2( 268o42’05” )
= 59,969 m
J14-15 rata-rata =2
59,96959,890
= 59,9295 m
J14-13 biasa = 100 ( 1140 – 860 ) sin2( 111o53’40” )
= 24,106 m
J14-13 luar biasa = 100 ( 1140 – 860 ) sin2( 248o04’25” )
= 24,095 m
J14-13 rata-rata =2
24,09524,106
43
= 24,1005 m
15. Patok 15
J15-16 biasa = 100 ( 1300 – 700 ) sin2( 91o46’00” )
= 35,711 m
J15-16 luar biasa = 100 ( 1300 – 700 ) sin2( 268o02’35” )
= 35,049 m
J15-16 rata-rata = 2
04935,35,711
= 35,88 m
J15-14 biasa = 100 ( 1300 – 700 ) sin2( 91o46’00” )
= 59,942 m
J15-14 luar biasa = 100 ( 1300 – 700 ) sin2( 269o28’55” )
= 59,995 m
J15-14 rata-rata = 2
59,99559,942
= 59,9685 m
16. Patok 16
J16-17 biasa = 100 ( 1100 – 900 ) sin2( 108o40’15” )
= 17,950 m
J16-17 luar biasa = 100 ( 1300 – 700 ) sin2( 251o17’50” )
= 17,943 m
J16-17 rata-rata = 2
17,94317,950
= 17,9465 m
J16-15 biasa = 100 ( 1190 – 810 ) sin2( 78o38’10” )
= 36,524 m
J16-15 luar biasa = 100 ( 1190 – 810 ) sin2( 281o04’25” )
= 36,598 m
44
J16-15 rata-rata = 2
36,59836,524
= 36,561 m
17. Patok 17
J17-18 biasa = 100 ( 1130 – 870 ) sin2( 69o02’30” )
= 22,67 m
J17-18 luar biasa = 100 ( 1130 – 870 ) sin2( 291o00’15” )
= 22,66 m
J17-18 rata-rata = 2
22,66 22,67
= 22,665 m
J17-16 biasa = 100 ( 1100 – 900 ) sin2( 74o12’25” )
= 18,25 m
J17-16 luar biasa = 100 ( 1100 – 900 ) sin2( 285o45’05” )
= 18,53 m
J17-16 rata-rata = 2
18,5318,25
= 18,525 m
18. Patok 18
J18-19 biasa = 100 ( 1240 – 760 ) sin2( 91o46’15” )
= 47,954 m
J18-19 luar biasa = 100 ( 1240 – 760 ) sin2( 268o13’15” )
= 47,9537 m
J18-19 rata-rata = 2
47,937 47,954
= 47,9538 m
J18-17 biasa = 100 ( 1130 – 870 ) sin2( 113o02’00” )
= 22,0196 m
J18-17 luar biasa = 100 ( 1130 – 870 ) sin2( 246o52’25” )
45
= 21,9892 m
J18-17 rata-rata = 2
21,9892 22,0196
= 22,0044 m
19. Patok 19
J19-20 biasa = 100 ( 1110 – 890 ) sin2( 114o08’30” )
= 18,3199 m
J19-20 luar biasa = 100 ( 1110 – 890 ) sin2( 245o50’00” )
= 18,3127 m
J19-20 rata-rata = 2
18,3127 18,3199
= 18,3163 m
J19-18 biasa = 100 ( 1240 – 760 ) sin2( 89o05’15” )
= 47,9878 m
J19-18 luar biasa = 100 ( 1240 – 760 ) sin2( 270o53’25” )
= 47,9884 m
J19-18 rata-rata = 2
47,988447,9878
= 47,9881 m
20. Patok 20
J20-21 biasa = 100 ( 1370 – 630 ) sin2( 96o05’20” )
= 73,1674 m
J20-21 luar biasa = 100 ( 1370 – 630 ) sin2( 263o53’55” )
= 73,1640 m
J20-21 rata-rata = 2
73,164073,1674
= 73,1657 m
J20-19 biasa = 100 ( 1110 – 890 ) sin2( 67o36’05” )
46
= 18,8056 m
J20-19 luar biasa = 100 ( 1110 – 890 ) sin2( 292o23’55” )
= 18,8056 m
J20-19 rata-rata = 2
18,805618,8056
= 18,8056 m
21. Patok 21
J21-22 biasa = 100 ( 1270 – 730 ) sin2( 94o53’40” )
= 53,6071 m
J21-22 luar biasa = 100 ( 1270 – 730 ) sin2( 265o53’40” )
= 53,7232 m
J21-22 rata-rata = 2
53,723253,6071
= 53,6651 m
J21-20 biasa = 100 ( 1370 – 630 ) sin2( 84o32’30” )
= 73,3304 m
J21-20 luar biasa = 100 ( 1370 – 630 ) sin2( 275o26’15” )
= 73,3355 m
J21-20 rata-rata = 2
73,335573,3304
= 73,3329 m
22. Patok 22
J22-1 biasa = 100 ( 1350 – 650 ) sin2( 90o04’00” )
= 69,999 m
J22-1 luar biasa = 100 ( 1350 – 650 ) sin2( 269o55’25” )
Perhitungan Beda Tinggi
1. Patok 1
47
= 101.998 Ctg ( 90o14’15” ) + 1.40 – 1
= - 0.022 m
= 101.998 Ctg ( 3600 - 269o46’05” ) + 1.40 – 1
= - 0.012 m
= - 0.017 m
= 69.995 Ctg ( 90o26’20” ) + 1.40 – 1
= -0.136 m
= 69.995 Ctg ( 3600 - 269o31’55” ) + 1.40 – 1
= - 0.171 m
= -0,153 m
2. Patok 2
= 65.999 Ctg ( 89o54’35” ) + 1.34 – 1
= 0.443 m
= 65.994 Ctg ( 3600 - 269o27’15” ) + 1.34 – 1
= -0,288 m
= 0.077 m
= 101.990 Ctg ( 90o33’05” ) + 1.34 – 1
48
= -0,641 m
= 101.990 Ctg ( 3600 - 269o26’00” ) + 1.34 – 1
= -0.641 m
= -0.654 m
3. Patok 3
= 66.819 Ctg ( 82o25’45” ) + 1.30 – 1
= 9.180 m
= 66.825 Ctg ( 3600 - 277o33’10” ) + 1.30 – 1
= 9.160 m
= 9.17 m
= 65.964 Ctg ( 91o19’20” ) + 1.30 – 1
= -1.222 m
= 65.963 Ctg ( 3600 - 268o39’35” ) + 1.30 – 1
= -1.243 m
= -1.232 m
4. Patok 4
= 25.977 Ctg ( 91o40’50” ) + 1.32 – 1
49
= - 0.442 m
= 25.977 Ctg ( 3600 - 268o18’00” ) + 1.32 – 1
= - 0.450 m
= - 0.446 m
= 65.862 Ctg ( 100o12’45” ) + 1.32 – 1
= - 11.545 m
= 65.959 Ctg ( 3600 - 260o01’25” ) + 1.32 – 1
= - 11.282 m
= - 11.413 m
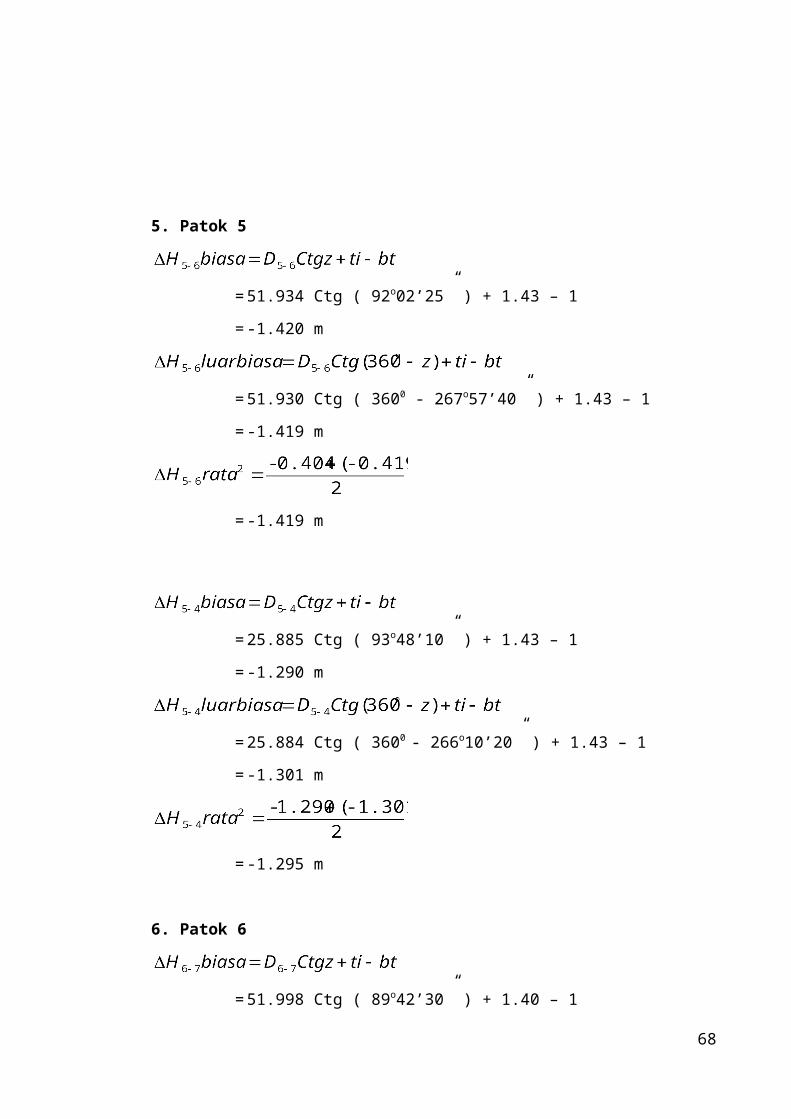
5. Patok 5
= 51.934 Ctg ( 92o02’25” ) + 1.43 – 1
= -1.420 m
= 51.930 Ctg ( 3600 - 267o57’40” ) + 1.43 – 1
= -1.419 m
= -1.419 m
50
= 25.885 Ctg ( 93o48’10” ) + 1.43 – 1
= -1.290 m
= 25.884 Ctg ( 3600 - 266o10’20” ) + 1.43 – 1
= -1.301 m
= -1.295 m
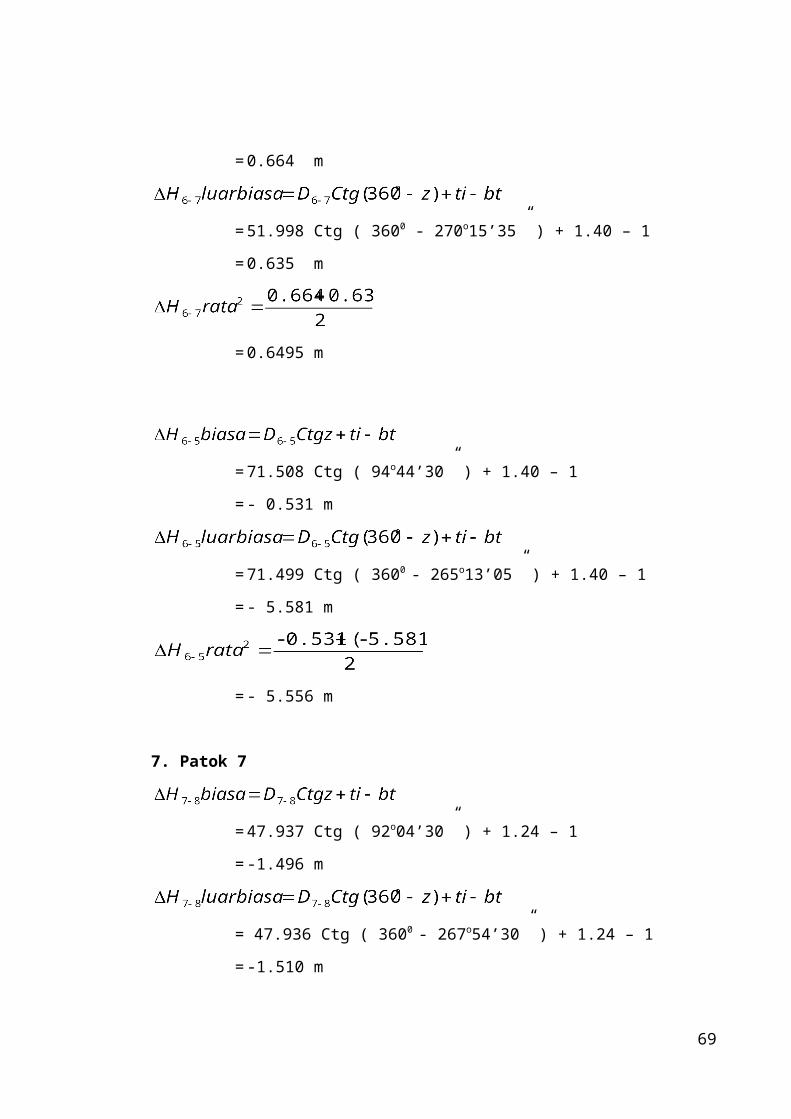
6. Patok 6
= 51.998 Ctg ( 89o42’30” ) + 1.40 – 1
= 0.664 m
= 51.998 Ctg ( 3600 - 270o15’35” ) + 1.40 – 1
= 0.635 m
= 0.6495 m
= 71.508 Ctg ( 94o44’30” ) + 1.40 – 1
= - 0.531 m
= 71.499 Ctg ( 3600 - 265o13’05” ) + 1.40 – 1
= - 5.581 m
= - 5.556 m
51
7. Patok 7
= 47.937 Ctg ( 92o04’30” ) + 1.24 – 1
= -1.496 m
= 47.936 Ctg ( 3600 - 267o54’30” ) + 1.24 – 1
= -1.510 m
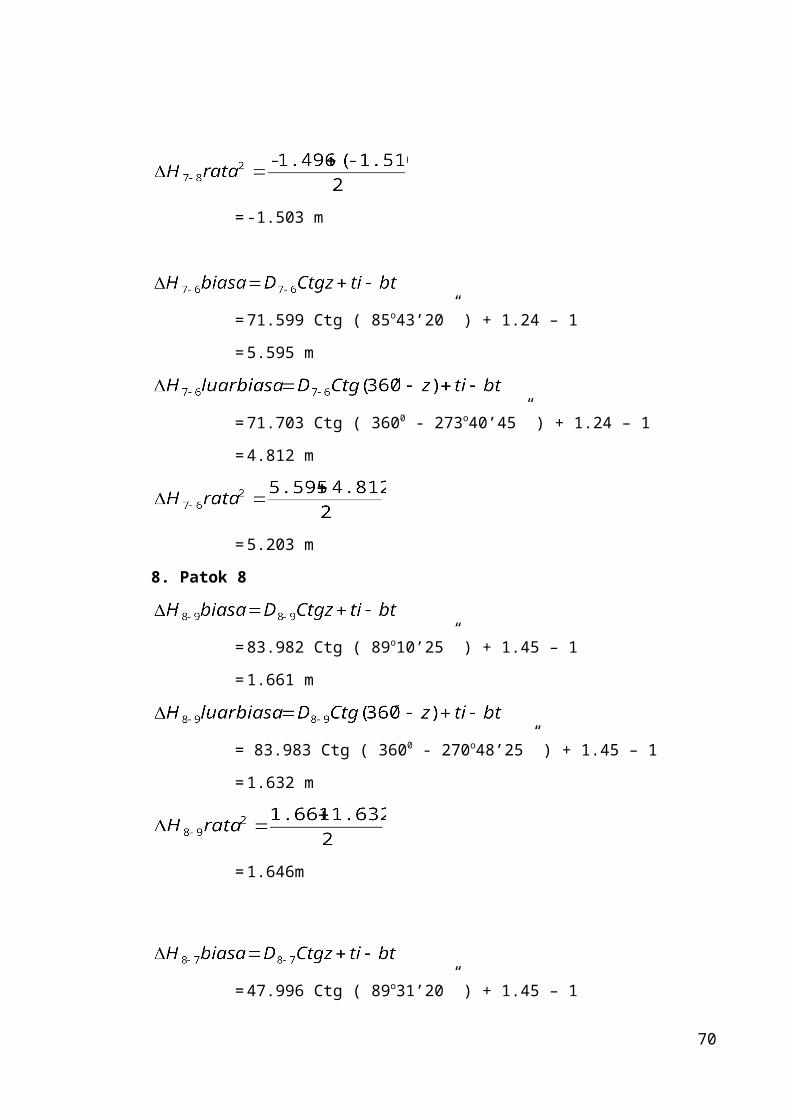
= -1.503 m
= 71.599 Ctg ( 85o43’20” ) + 1.24 – 1
= 5.595 m
= 71.703 Ctg ( 3600 - 273o40’45” ) + 1.24 – 1
= 4.812 m
= 5.203 m
8. Patok 8
= 83.982 Ctg ( 89o10’25” ) + 1.45 – 1
= 1.661 m
= 83.983 Ctg ( 3600 - 270o48’25” ) + 1.45 – 1
= 1.632 m
= 1.646m
52
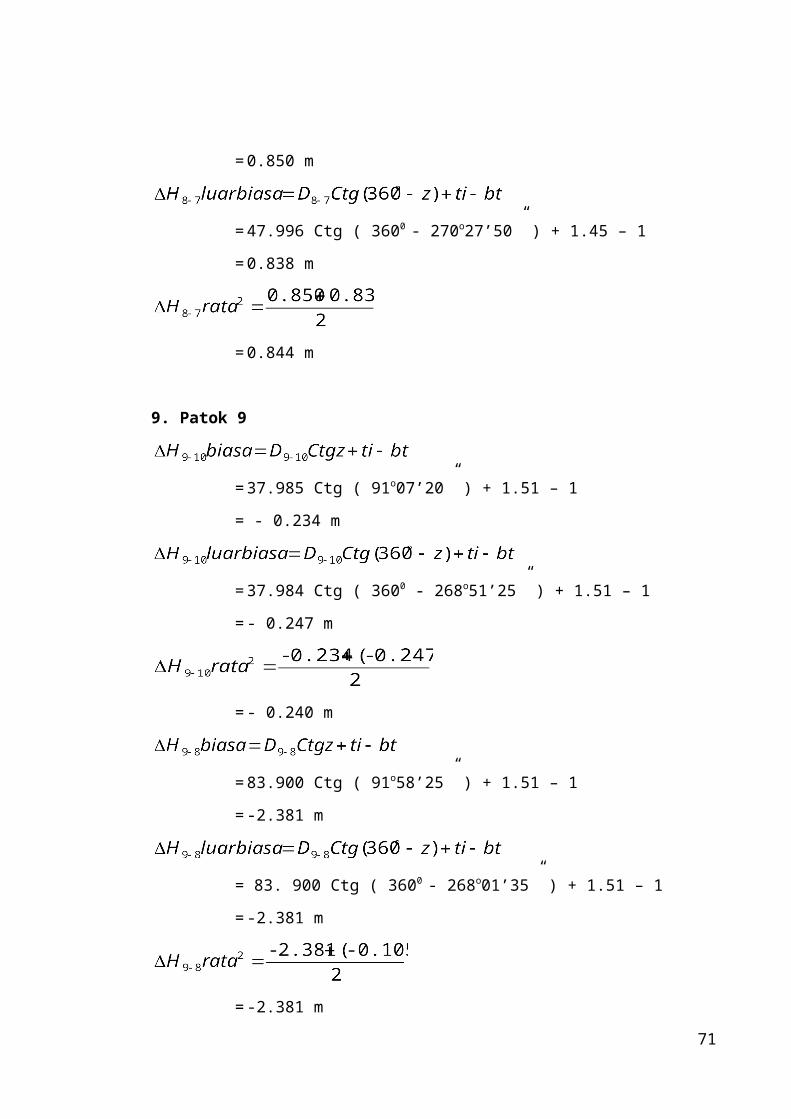
= 47.996 Ctg ( 89o31’20” ) + 1.45 – 1
= 0.850 m
= 47.996 Ctg ( 3600 - 270o27’50” ) + 1.45 – 1
= 0.838 m
= 0.844 m
9. Patok 9
= 37.985 Ctg ( 91o07’20” ) + 1.51 – 1
= - 0.234 m
= 37.984 Ctg ( 3600 - 268o51’25” ) + 1.51 – 1
= - 0.247 m
= - 0.240 m
= 83.900 Ctg ( 91o58’25” ) + 1.51 – 1
= -2.381 m
= 83. 900 Ctg ( 3600 - 268o01’35” ) + 1.51 – 1
= -2.381 m
= -2.381 m
10. Patok 10
53
= 47.909 Ctg ( 92o28’55” ) + 1.43 – 1
= -1.646 m
= 47.960 Ctg ( 3600 - 268o21’30” ) + 1.43 – 1
= -0.944 m
= -1.295 m
= 37.999 Ctg ( 90o16’05” ) + 1.43 – 1
= 0.252 m
= 37.999 Ctg ( 3600 - 269o43’20” ) + 1.43 – 1
= 0.245 m
= 0.248 m
11. Patok 11
= 45.980 Ctg ( 78o09’45” ) + 1.47 – 1
= 10.107 m
= 45.989 Ctg ( 3600 - 281o48’35” ) + 1.47 – 1
= 10.085 m
= 10.096 m
54
= 97.996 Ctg ( 89o27’45” ) + 1.47 – 1
= 1.389 m
= 47.995 Ctg ( 3600 - 270o31’20” ) + 1.47 – 1
= 0.907m
= 1.148 m
12. Patok 12
= 33.907 Ctg ( 87o01’05” ) + 1.37 – 1
= 2.136 m
= 33.826 Ctg ( 3600 - 274o05’35” ) + 1.37 – 1
= 2.790 m
= 2.463 m
= 45.328 Ctg ( 103o38’40” ) + 1.37 – 1
= -10.633 m
= 45.638 Ctg ( 3600 - 257o11’10” ) + 1.37 – 1
= -10.010 m
= -10.321 m
13. Patok 13
55
= 24.645 Ctg ( 69o45’00” ) + 1.39 – 1
= 9.482 m
= 24.648 Ctg ( 3600 - 290o14’30” ) + 1.39 – 1
= 9.479 m
= 9.480 m
= 33.727 Ctg ( 95o08’15” ) + 1.39 – 1
= -2.642 m
= 33.722 Ctg ( 3600 - 264o49’10” ) + 1.39 – 1
= -2.667 m
= 2.654 m
14. Patok 14
= 59.890 Ctg ( 92o27’00” ) + 1.54 – 1
= - 2.022 m
= 59.969 Ctg ( 3600 - 268o42’05” ) + 1.54 – 1
= - 0.819 m
= - 1.420 m
= 24.106 Ctg ( 111o53’40” ) + 1.54 – 1
56
= -9.147 m
= 24.095 Ctg ( 3600 - 248o04’25” ) + 1.54 – 1
= -9.159 m
= -9.153 m
15. Patok 15
= 35.711 Ctg ( 104o12’25” ) + 1.56 – 1
= -9.413 m
= 36.049 Ctg ( 3600 - 256o54’15” ) + 1.56 – 1
= -7.826 m
= -8.619 m
= 59.942 Ctg ( 91o46’00” ) + 1.56 – 1
= - 1.288 m
= 59.995 Ctg ( 3600 - 269o28’55” ) + 1.56 – 1
= 0.017 m
= 0.635 m
16. Patok 16
57
= 17.950 Ctg ( 108o40’15” ) + 1.60 – 1
= - 5.465 m
= 17.943 Ctg ( 3600 - 251o17’50” ) + 1.60 – 1
= - 5.474 m
= - 5.469 m
= 36.524 Ctg ( 78o38’10” ) + 1.60 – 1
= 7.940 m
= 36.598 Ctg ( 3600 - 281o04’25” ) + 1.60 – 1
= 7.762 m
= 7.851 m
17. Patok 17
= 22.67 Ctg ( 69o02’30” ) + 1.57 – 1
= 9.253 m
= 22.66 Ctg ( 3600 - 291o00’15” ) + 1.57 – 1
= 9.27 m
= 9.261 m
= 18.52 Ctg ( 74o12’25” ) + 1.57 – 1
58
= 5.808 m
= 18.53 Ctg ( 3600 - 285o45’05” ) + 1.57 – 1
= 5.796 m
= 5.802 m
18. Patok 18
= 47.954 Ctg ( 91o46’15” ) + 1.59 – 1
= -0.892 m
= 47.954 Ctg ( 3600 - 268o13’15” ) + 1.59 – 1
= -0.899 m
= -0.895 m
= 22.019 Ctg ( 113o02’00” ) + 1.59 – 1
= - 8.772 m
= 21.989 Ctg ( 3600 - 246o52’25” ) + 1.59 – 1
= - 8.801 m
= - 8.786 m
19. Patok 19
= 18.319 Ctg ( 114o08’30” ) + 1.42 – 1
= - 7.790 m
59
= 18.313 Ctg ( 3600 - 245o50’00” ) + 1.42 – 1
= - 7.797 m
= - 7.793 m
= 47.988 Ctg ( 89o05’15” ) + 1.42 – 1
= 1.184 m
= 47.988 Ctg ( 3600 - 270o53’25” ) + 1.42 – 1
= 1.166 m
= 1.175 m
20. Patok 20
= 73.167 Ctg ( 96o05’20” ) + 1.50 – 1
= -7.304 m
= 73.164 Ctg ( 3600 - 263o53’55” ) + 1.50 – 1
= -7.321 m
= -7.312 m
= 18.806 Ctg ( 67o36’05” ) + 1.50 – 1
= 8.251 m
60
= 18.806 Ctg ( 3600 - 292o23’55” ) + 1.50 – 1
= 8.251 m
= 8.251 m
21. Patok 21
= 53.607 Ctg ( 94o53’35” ) + 1.45 – 1
= -4.139 m
= 53.723 Ctg ( 3600 - 269o53’40” ) + 1.45 – 1
= -3.406 m
= -3.772 m
= 73.330 Ctg ( 84o32’30” ) + 1.45 – 1
= 7.457 m
= 73.335 Ctg ( 3600 - 275o26’15” ) + 1.45 – 1
= 7.431 m
= 7.444 m
22. Patok 22
= 69.999 Ctg ( 90o04’00” ) + 1.37 – 1
61
= 0.288 m
= 69.999 Ctg ( 3600 - 269o55’25” ) + 1.37 – 1
= 0.276 m
= 0.282 m
= 53.814 Ctg ( 86o38’10” ) + 1.37 – 1
= 3.533 m
= 53.816 Ctg ( 3600 - 273o20’55” ) + 1.37 – 1
= 3,518 m
= 3.525 m
Perhitungan Beda Tinggi Total
62
63

Pengkoreksian Beda Tinggi
a-b =
1-2 =
1-22 =
2-3 =
3-4 =
4-5 =
64

5-6 =
6-7 =
7-8 =
8-9 =
9-10 =
10-11 =
11-12 =
12-13 =
13-14 =
14-15 =
15-16 =
16-17 =
17-18 =
18-19 =
65
19-20 =
20-21 =
21-22 =
Syarat Absis (J sin α)1. J1-2 sin α1-2 = 101.994 sin (257o10’55”)
= -99.452 m
2. J2-3 sin α2-3 = 65.979 sin (202o19’33.75”)
= -25.063 m
3. J3-4sin α3-4 = 66.366 sin (283o6’35”)
= -64.636 m
4. J4-5 sin α4-5 = 25.930 sin (36o31’8.75”)
= 15.430 m
5. J5-6 sin α5-6 = 51.965 sin (324o3’45”)
= -30.498 m
6. J6-7 sin α6-7 = 71.577 sin (352o39’1.25”)
= -9.156 m
7. J7-8 sin α7-8 = 47.966 sin (91o5’7.5”)
= 47.957 m
8. J8-9sin α8-9 = 83.941 sin (43o58’1.25”)
= 58.275 m
66
9. J9-10 sin α9-10 = 37.991 sin (64o20’30”)
= 34.244 m
10. J10-11 sin α10-11 = 47.964 sin (92o36’26.25”)
= 47.914 m
11. J11-12 sin α11-12 = 45.733 sin (356o24’0”)
= -2.871 m
12. J12-13 sin α12-13 = 33.795 sin (354o33’46.25”)
= -3.202 m
13. J13-14 sin α13-14 = 24.373 sin (38o22’15”)
= 15.129 m
14. J14-15 sin α14-15 = 59.948 sin (139o34’48.75”)
= 38.869 m
15. J15-16 sin α15-16 =36.220 sin (132o43’57.5”)
= 26.604 m
16. J16-17 sin α16-17 = 18.235 sin (118o32’36.25”)
= 16.018 m
17. J17-18 sin α17-18 = 22.335 sin (61o32’25”)
= 19.635 m
18. J18-19 sin α18-19 = 47.971 sin (133o34’11.25”)
= 34.756 m
19. J19-20 sin α19-20 = 18.561 sin (211o4’21.25”)
= -9.579
67
20. J20-21 sin α20-21 = 73.249 sin (191o5’21.25”)
= -14.088 m
21. J21-22 sin α21-22 = 53.740 sin (162o47’18.75”)
= 15.901 m
22. J22-1 sin α22-1 = 69.997 sin (298o33’15”)
= -61.482 m
Jumlah J sin α ( ΣJ sin α ) = 50,7047
Perhitungan koreksi J sin α
Syarat ΣJ sin α = 0,0000 ( poligon tertutup )
Jumlah J sin α ( ΣJ sin α ) = 50.7047 m
Jumlah jarak ( Σ J ) = 1105.794 m
Pengkoreksian
1. J1-2 sin α1-2 - = -99,452 -
= -99,452 – 4,676
= -104,128 m
2. J2-3sin α2-3 - = -25,063 -
= -25,063 – 3,025
= -28,088
3. J3-4sin α3-4 - = -64,636 -
= -64,636 – 3,0431
= -67,6791 m
68
4. J4-5sin α4-5 - = 15,430 -
= 15,430 – 4,676
= 14,2411
5. J5-6 sin α5-6 - = -30,4983 -
= -30,4983 – 4,676
= -32,881
6. J6-7 sin α6-7 - = -9,156 -
= -9,156 – 4,676
= -12,438
7. J7-8 sin α7-8 - = 47,957 -
= 47,957 – 4,676
= 45,7576
8. J8-9 sin α8-9 - = 58,275 -
= 58,275 – 4,676
= 54,426
9. J9-10 sin α9-10 - = 34,244 -
= 34,244 – 4,676
= 32,502
69
10. J10-11 sin α10-11 - = 47,964 -
= 47.964 – 4,676
= 45,7147
11. J11-12 sin α11-12 - = -2,871 -
= -2,871 – 4,676
= -4,968
12. J12-13 sin α12-13 - = -3,202 -
= -3,202 – 4,676
= -5,182
13. J13-14 sin α13-14 - = 15,129 -
= 15.129 – 4,676
= 14,012
14. J14-15 sin α14-15 - = 38,869 -
= 38.869 – 4,676
= 36,121
15. J15-16 sin α15-16 - = 26,604 -
= 26.604 – 4,676
= 24,944
16. J16-17 sin α16-17 - = 16,018 -
= 16.018 – 4,676
70
= 15,182
17. J17-18 sin α17-18 - = 19,635 -
= 19.635 – 4,676
= 18,611
18. J18-19 sin α18-19 - = 34,756 -
= 34.756 – 4,676
= 32,557
19. J19-20 sin α19-20 - = -9,579 -
= -9,579 – 4,676
= -10,43
20. J20-21 sin α20-21 - = -14,088 -
= -14.088 – 4,676
= -17,446
21. J21-22 sin α21-22 - = 15,901 -
= 15.901 – 4,676
= 13,437
22. J22-1 sin α22-1 - = -61,482 -
= -61.482 – 4,676
= 3.209 m
71
Perhitungan J cos α
1. J1-2 cos α1-2 = 101,994 cos (257o10’55”)
= -22,627
2. J2-3 cos α2-3 = 65,979 cos (202o19’33,75”)
= -61,033
3. J3-4cos α3-4 = 66,366 cos (283o06’35”)
= 15,052
4. J4-5 cos α4-5 = 25,930 cos (36o31’8,75”)
= 20,838
5. J5-6 cos α5-6 = 51,965 cos (324o03’45”)
= 42,073
6. J6-7 cos α6-7 = 71,577 cos (352o39’1,25”)
= 70,988
7. J7-8 cos α7-8 = 47,966 cos (91o05’7,5”)
= -0,908
8. J8-9cos α8-9 = 83,941 cos (43o58’1,25”)
= 60,415
9. J9-10 cos α9-10 = 37,991 cos (64o20’30”)
= 16,450
10. J10-11 cos α10-11 = 47,964 cos (92o36’26,25”)
= -2,181
72
11. J11-12 cos α11-12 = 45,733 cos (356o24’00”)
= 45,642
12. J12-13 cos α12-13 = 33,795 cos (354o33’46,25”)
= 33,642
13. J13-14 cos α13-14 = 24,373 cos (38o22’15”)
= 19,108
14. J14-15 cos α14-15 = 59,948 cos (139o34’48,75”)
= -45,639
15. J15-16 cos α15-16 = 36,220 cos (132o43’57,5”)
= -24,578
16. J16-17 cos α16-17 = 18,235 cos (118o32’36,25”)
= -8,713
17. J17-18 cos α17-18 = 22,335 cos (61o32’25”)
= 10,643
18. J18-19 cos α18-19 = 47,971 cos (133o34’11,25”)
= -33,063
19. J19-20 cos α19-20 = 18,561 cos (211o04’21,25”)
= -15,897
20. J20-21 cos α20-21 = 73,249 cos (191o05’21,25”)
= -71,881
21. J21-22 cos α21-22 = 53,740 cos (162o47’18,75”)
= -51,333
73
22. J22-1 cos α22-1 = 69,997 cos (298o33’15”)
= 33,457
Jumlah J cos α ( ΣJ cos α ) = 30,455
Perhitungan koreksi J cos α
Syarat ΣJ cos α = 0,0000 ( poligon tertutup )
Jumlah J cos α ( ΣJ cos α ) = 30,455
Jumlah jarak ( Σ J ) = 1105,794 m
Pengkoreksian
1. J1-2 cos α1-2 - = -22,627 -
= -22,627 – 2,809
= -25,436
2. J2-3cos α2-3 - = -61,033 -
= -61,033 – 1,817
= -62,85
3. J3-4cos α3-4 - = 15,052 -
= 15,052 – 1,827
= 13,225
4. J4-5cos α4-5 - = 20,838 -
= 20.838 – 0,714
= 20,124
74
5. J5-6 cos α5-6 - = 42,073 -
= 42.073 – 1,431
= 40,642
6. J6-7 cos α6-7 - = 70,988 -
= 70,988 – 1,971
= 69,017
7. J7-8 cos α7-8 - = -0,908 -
= -0,908 – 1,321
= -2,229
8. J8-9 cos α8-9 - = 60,415-
= 60.415 – 2,311
= 58,104
9. J9-10 cos α9-10 - = 16,450 -
= 16,450 – 1,046
= 15,404
10. J10-11 cos α10-11 - = -2,181 -
= -2,181 – 1,320
= -3,501
11. J11-12 cos α11-12 - = 45,642 -
75
= 45.642 – 1,259
= 44,383
12. J12-13 cos α12-13 - = 33,642 -
= 33,642– 0,930
= 32,712
13. J13-14 cos α13-14 - = 19,108 -
= 19,108 – 0,671
= 18,437
14. J14-15 cos α14-15 - = -45,639 -
= -45,639 – 1,651
= -47,29
15. J15-16 cos α15-16 - = -24,578 -
= -24,578 – 0,997
= -25,575
16. J16-17 cos α16-17 - = -8,713 -
= -8,713 – 0,502
= -9,215
17. J17-18 cos α17-18 - = 10,643 -
= 10,643 – 0,615
= 10,028
76
18. J18-19 cos α18-19 - = -33,063 -
= -33,063– 1,321
= -34,384
19. J19-20 cos α19-20 - = -15,897 -
= 15897 – 0,511
= -16,408
20. J20-21 cos α20-21 - = -71,881 -
= -71,881 – 2,017
= -73,898
21. J21-22 cos α21-22 - = -51,333 -
= -51,333 – 1,480
= -52,813
22. J22-1 cos α22-1 - = 33,457 -
= 33,457 – 1,927
= 31,53
Perhitungan Koordinat
Koordinat X
X1 = 5000
X2 = X1 + J1-2 sin 1-2
= 5000 + (-104,128)77
= 4895,872
X3 = X2 + J2-3 sin 2-3
= 4895,872 + (-28,088)
= 4867,784
X4 = X3 + J3-4 sin 3-4
= 4867,784 + (-67,67911)
= 4800,1049
X5 = X4 + J4-5 sin 4-5
= 4800,1049 + 14,2411
= 4814,346
X6 = X5 + J5-6 sin 5-6
= 4814,346 + (-32,881)
= 4781,465
X7 = X6 + J6-7 sin 6-7
= 4781,465 + (-12,438)
= 4769,027
X8 = X7 + J7-8 sin 7-8
= 4769,027 + 45,7576
= 4814,7846
X9 = X8 + J8-9 sin 8-9
= 4814,7846 + 54,426
= 4869,2106
X10 = X9 + J9-10 sin 9-10
= 4869,2106 + 32,502
78
= 4901,7126
X11 = X10 + J10-11 sin 10-11
= 4901,7126 + 45,7147
= 4947,4273
X12 = X11 + J11-12 sin 11-12
= 4947,4273 + (-4,968)
= 4942,4593
X13 = X12 + J12-13 sin 12-13
= 4942,4593 + (-5,182)
= 4937,2773
X14 = X13 + J13-14 sin 13-14
= 4937,2773 + 14,012
= 4951,2893
X15 = X14 + J14-15 sin 14-15
= 4951,2893 + 36,121
= 4987,4103
X16 = X15 + J15-16 sin 15-16
= 4987,4103 + 24,944
= 5012,3543
X17 = X16 + J16-17 sin 16-17
= 5012,3543 + 15,182
= 5027,5363
X18 = X17 + J17-18 sin 17-18
= 5027,5363 + 18,611
79
= 5046,1473
X19 = X18 + J18-19 sin 18-19
= 5046,1473 + 32,557
= 5078,7043
X20 = X19 + J19-20 sin 19-20
= 5078,7043 + (-10,43)
= 5068,2743
X21 = X20 + J20-21 sin 20-21
= 5068,2743 + (-17,446)
= 5050,8283
X22 = X21 + J21-22 sin 21-22
= 5050,8283 + 13,437
= 5064,2653
Koordinat Y
Y1 = 5000
Y2 = Y1 + J1-2 cos 1-2
= 5000 + (-25,436)
= 4974,564
Y3 = Y2 + J2-3 cos 2-3
= 4974,564 + (-62,85)
= 4911,714
Y4 = Y3 + J3-4 cos 3-4
= 4911,714 + 13,225
= 4924,93980
Y5 = Y4 + J4-5 cos 4-5
= 4924,939 + 20,124
= 4945,063
Y6 = Y5 + J5-6 cos 5-6
= 4945,063 + 40,642
= 4985,705
Y7 = Y6 + J6-7 cos 6-7
= 4985,705 + 69,017
= 5054,722
Y8 = Y7 + J7-8 cos 7-8
= 5054,722 + (-2,229)
= 5052,493
Y9 = Y8 + J8-9 cos 8-9
= 5052,493 + 58,104
= 5110,597
Y10 = Y9 + J9-10 cos 9-10
= 5110,597 + 15,404
= 5126,001
Y11 = Y10 + J10-11 cos 10-11
= 5126,001 + (-3,501)
= 5122,5
Y12 = Y11 + J11-12 cos 11-12
= 5122,5 + 44,383
81
= 5166,883
Y13 = Y12 + J12-13 cos 12-13
= 5166,83 + 32,712
= 5199,595
Y14 = Y13 + J13-14 cos 13-14
= 5199,595 + 18,437
= 5218,032
Y15 = Y14 + J14-15 cos 14-15
= 5218,032 + (-47,29)
= 5170,742
Y16 = Y15 + J15-16 cos 15-16
= 5170,742 + (-25,575)
= 5145,167
Y17 = Y16 + J16-17 cos 16-17
= 5145,167 + (-9,215)
= 5135,952
Y18 = Y17 + J17-18 cos 17-18
= 5135,952 + 10,028
= 5145,98
Y19 = Y18 + J18-19 cos 18-19
= 5145,98 + (-34,384)
= 5111,596
Y20 = Y19 + J19-20 cos 19-20
= 5111,596 + (-16,408)
= 5095,188
82
Y21 = Y20 + J20-21 cos 20-21
= 5095,188 + (-73,898)
= 5021,29
Y22 = Y21 + J21-22 cos 21-22
= 5021,29 + (-52,813)
= 4968,477
Koordinat Z
Z1 = 100
Z2 = Z1 +
= 100 + (-0,3755)
= 99,6245
Z3 = Z2 +
= 99,6245 + 0,6278
= 100,2523
Z4 = Z3 +
= 100,2523 + 10,2646
= 110,5169
Z5 = Z4 +
= 110,5169 + (-0,8803)
= 109,6366
Z6 = Z5 +
= 109,6366 + (-1,0546)
= 108,58283
Z7 = Z6 +
= 108,582 + (-5,4074)
= 103,1746
Z8 = Z7 +
= 103,1746 + (-1,192)
= 101,9826
Z9 = Z8 +
= 101,9826 + 1,9796
= 103,9622
Z10 = Z9 +
= 103,9622 + (-0,2591)
= 103,7031
Z11 = Z10 +
= 103,7031 + (-1,24)
= 102,4631
Z12 = Z11 +
= 102,4631 + 10,1899
= 112,653
Z13 = Z12 +
= 112,653 + 2,5446
= 115,1976
84
Z14 = Z13 +
= 115,1976 + 9,3064
= 124,504
Z15 = Z14 +
= 124,504 + (-1,0508)
= 123,4532
Z16 = Z15 +
= 123,4532 + (-8,2494)
= 115,2038
Z17 = Z16 +
= 115,2038 + (-5,6422)
= 109,5616
Z18 = Z17 +
= 109,5616 + 9,0142
= 118,5758
Z19 = Z18 +
= 118,5758 + (-1,054)
= 117,5218
Z20 = Z19 +
= 117,5218 + (-8,0293)
= 109,4925
85
Z21 = Z20 +
= 109,4925 + (-7,4071)
= 102,0854
Z22 = Z21 +
= 102,0854 + (-2,048)
= 100,0374
3. PEMBAHASAN
86
Fungsi dan Bagian Alat Ukur Teodolit :
Fungsi utama dari teodolit adalah sebagai alat untuk sudut,dalam perkembangannya
teodolit juga digunakan untuk menentukan jarak dan mencari beda tinggi antara dua
titik.
Fungsi bagian-bagian alat ukur :
1. Pembantu visir, berfungsi untuk membantu pembidikan yaitu membantu
mengarahkan teropong ke target.
2. Klem Sumbu II, berfungsi untuk pengunci sumbu II.
3. Lensa obyektif, berfungsi untuk menangkap bayangan obyek / target.
4. Sumbu II, berfungsi sebagai poros perputaran teropong terhadap sumpu putar
horizontal.
5. Nivo teropong, berfungsi membantu mendatarkan teropong.
6. Ronsel lensa tengah, berfungsi memperjelas bayangan yang ditangkap oleh lensa
obyektif.
7. Reflektor sinar, berfungsi untuk menangkap cahaya dan memantulkannya ke
mikroskop pembacaan lingkaran horisontal, sehinga bisa terbaca.
8. Mikroskop bacaan lingkaran horisontal A, berfungsi sebagai tempat pembacaan arah
horizontal.
9. Klem horisontal, berfungsi sebagai klem pembuka atau pengunci lingkaran
horizontal.
10. Ronsel gerak halus limbus, berfungsi menggerakkan limbus dengan perlahan pada
saat klem limbus dikunci (membantu menepatkan bidikan ke target).
87
11. Sekrup penyetel ABC, berfungsi untuk menyeimbangkan nivo kota guna
mempercepat pembuatan sumbu I vertikal.
12. Plat dasar, sebagai plat penyangga seluruh bagian alat.
13. Kepala statif, sebagai tempat meletakkan plat dasar alat.
14. Sekrup koreksi nivo aihidade vertikal, sekrup yang digunakan untuk
menyeimbangkan nivo alhidade vertikal.
15. Nivo alhidade vertikal, sebagai indikator untuk mencari kesalahan indek vertikal.
16. Tabung sinar, membantu menyinari Iingkaran vertikal.
17. Alhidade vertikal, sebagai alat pembacaan arah vertikal.
18. Mikroskop pembacaan Iingkaran vertikal, tempat pembacaan Iingkaran vertikal.
19. Ring pelindung diafragma, berfungsi sebagai pelindung diafragma.
20. Lensa okuler, sebagai lensa pengamat saat menepatkan target.
21. Mikroskop bacaan Iingkaran horisontal B, fungsi samadengan nomor 8.
22. Sekrup gerak halus vertikal (teropong), berfungsi menggerakkan teropong arah
vertikal secara perlahan pada saat klem teropong dikunci.
23. Sekrup koreksi nivo aihidade horisontal, berfungsi menyeimbangkan nivo Alhidade
horizontal.
24. Nivo alhidade horisontal, sebagai indikator pada saat membuat sumbu I Vertikal.
25. Sekrup gerak halus horisontal, berfungsi menggerakkan teropong arah horisontal
dengan perlahan pada saat klem horisontal dikunci.
26. Kaki statif, sebagai penyangga statif dan alat dimana tinggi rendahnya dapat
disesuaikan dengan pemakai.
27. Penggantung unting-unting, sebagai tempat menggantungkan unting-unting pada
saat melakukan sentering.
28. Baut instrumen, berfungsi untuk mengunci alat pada statif agar tidak mudah Iepas.
Sentring adalah menempatkan sumbu 1 alat ukur tepatdi atas suatu titik yang ada
di tanah .Hal ini selalu di lakukan pada saat akan mendirikan alat di suatu titik ,berikut
cara cara nya :
lihat di optical plummet,apabila titik target terlihat ,maka kita hanya menepatkan
target dengan menggunakan sekrup ABC saja,setelah tepat,baru mainkan kaki statif
untuk mengetengahkan nivo kotak/tabung(tidak menggeser kedudukan kaki
statif).jangan lupa ketika dah tepat,cek kembali target dengan optical
88

plummet.kalau kurang tepat,tengahkan kembali dengan cara mengendurkan skrup
pengait alat dan geser instrumen sampai titik target tepat dengan lingkaran bidikan
optical plummet
lihat di optical plummet,apabila titik target tidak terlihat,maka kita mencari &
menepatkan target dengan cara mengangkat 2 kaki statif sambil melakukan
pengamatan di optical plummetnya,tidak perlu terlalu tepat.setelah itu tepatkan
dengan menggeser instrumen,selanjutnya kita mulai mengatur nivo kotak /
tabung(mengatur sumbu 1 vertikal).ketika sudah tepat jangan lupa untuk mengecek
kembali kedudukan target dengan optical plummet
Cara pembacaan rambu ukur adalah pada rambu ukur akan terlihat huruf E dan
beberapa kotak kecil yang berwarna merah dan hitam. Setiap huruf E mempunyai jarak
5 cm dan setiap kotak kecil panjangnya 1cm. 1 kotak pada rambu adalah 1000mm
berarti 100 cm aau 1m. selisih BA dan BT sama dengan selisih BT dan BB.
Penggerak halus vertical berfungsi pada saat kita ingin memperjelas agar paku
yang diinginkan terlihat lebih jelas dengan cara memutarnya perlahan lahan, untuk
mengatur benang tengah pada rambu ukur, sedangkan penggerak halus horizontal
berfungsi menggerakkan secara halus sumbu horizontal. Cara memfokuskan bidikan
dengan cara mengatur teropong ke atas atau kebawah serta mengatur penggerak halus
vertical. Sekrup digunakan pada saat menyentring alat, mengatur gelembung nivo kotak
tepat di tengah lingkaran.
Pembacaan sudut horizontal HA untuk mendapatkan sudut luar ,sedangkan
pembacaan sudut horizontal HL untuk mendapatkan sudut dalam. Jadi perbedaan sumbu
HA dan HL ,yaitu pembacaan sumbu horizontal HA adalah dibaca dengan searah jarum
jam, sedangkan pembacaan sumbu horizontal HL dibaca berlawanan jarum jam.
Sudut horizontal adalah sudut yang dibentuk oleh titik dengan teropong alat
dalam bacaan secara horizontal. Sudut vertical adalah sudut yang dibentuk titik serta di
ukur dengan teodolit dalam keadaan bacaan secatra vertical terhadap rambu ukur yang
dibidik
Sudut horizontal didapatkan saat dilakukan penembakan terhadap patok,
sedangkan sudut vertical pada saat penembakan terhadap rambu ukur saat menentukan
batas atas, batas tengah dan batas bawah
89
Sudut helling adalah jika pembacaan sudut membentuk sudut diatas
180° ,sedangakan sudut zenith jika pembacaan sudut dibawah 180°. Sudut vertical yang
digunakan dalam praktik adalah sudut zenith
Jarak dengan meteran adalah jarak yang diukur menggunakan meteran dari satu
patok ke patok lainnya, sedangkan jarak perhitungan adalah jarak yang dihitung dengan
menggunakan pengolahan data terlebih dahulu yang telah dicatat dilapangan saat
praktikum
HA merupakan pembacaan sudut horizontal dalam dengan besar sudut 0-180°
bila berlawanan arah dengan jarum jam, sedangkan HL adalah pembacaan sudut luar
dengan besar sudut diatas 180°dan merupakan sudut luar apa bila sebaliknya
Sudut biasa dan luar biasa digunakan agar dapat mnentukan sudut yang di
peroleh tiap titik dan mempermudah perbandingan data
Maksud dari tanda (-) negative pada hasil pengukuran beda tinggi horizontal
adalah bahwa titik tersebut tingginya lebih rendah dan jika dibandingkan dengan tinggi
rata rata semua patok patok yang telah diukur.
Azimut adalah sudut yang di ukur searah jarum jam dari sembarang meridian
acuan. Sebagai referensi sudut nol dipakai arah mata angin Utara. Dalam pengukuran
tanah datar, azimuth biassanya diukur dari utara, tetapi para ahli astronomi, militer dan
National Geodetic Survey memakai selatan sebagai arah acuan. Azimut merupakan
sudut horizontal yang diperole dari salah satu ujung jarum sampai pada ujung objektif
garis bidik yang besarnya sama dengan angka pembacaan azimuth magnatis dibaca pada
ujung utara jarum magnet. Tanda (+) berarti arah putar searah jarum jam dari sudut nol,
tanda (-) untuk arah sebaliknya. Rumus yang dapat dugunakan untuk menetukan
azimuth adalah :
Sudut dalam : α23 = α12 – β2 + 180o
Sudut luar : α23 = α12 + β2 - 180o
Ada tiga macam azimuth yaitu :
a) Azimuth Sebenarnya,yaitu besar sudut yang dibentuk antara utara sebenarnya dengan
titik sasaran
90
b) Azimuth Magnetis, yaitu sudut yang dibentuk antara utara kompas dengan titik
sasaran
c) Azimuth Peta, yaitu besar sudut yang dibentuk antara utara peta dengan titik sasaran.
Perbedaan koordinat UTM dan geografis ialah koordinat geografis dibaca
dengan hitungan derajat, menit dan detik. Sedangkan UTM (Universal tranverse
Mercator) adalah proyeksi silinder horizontal yang berisi conform yang membagi
ellipsoid menjadi daerah – daerah dan zone – zone selebar 6 yang dibatasi oleh dua
buah meridian dan lintang antara 80o s dan 84o u. Tiap zone pada proyeksi UTM
mempunyai sebuah meridian tengah.
Rumus konversi dari UTM ke Geografis :
BS = ( 10.000.000 – nilai utara ( UTM) / panjang 1o lintang )
BT = (nilai bujur UTM – 500.000) / ( Panjang 1o lintang )
Poligon berasal dari kata polygon yang berarti poly : banyak dan gon(gone) :
titik. Yang kita maksud disini adalah poligon yang digunakan sebagai kerangka dasar
pemetaan yang memiliki titik - titik dimana titik tersebut mempunyai sebuah koordinat
X dan Y. Tujuan dari pengukuran polygon adalah :
a. Menentukan koordinat titik – titik yang belum di ketahui koordinatnya dari titik
yang telah diketahui koordinatnya
b. Merapatkan jaringan kerangka pengukuran yang telah ada
c. Sebagai kerangka pengukuran dan pemetaan
Macam – macam polygon
91
a. Atas dasar bentuk
Polygon tertutup
Polygon terbuka
b. Atas dasar titik ikat
Polygon terikat sempurna
Polygon terbuka terikat sempurna
Polygon bebas ( tanpa ikatan )
c. Atas dasar hirarki dalam pemetaan
Polygon utama ( induk )
Polygon cabang
Poligon memiliki beberapa jenis di pandang dari bentuk dan titik refrensi
(acuan) yang digunakan sebagai sistem koordinat dan kontrol kualitas dari
pengukuran poligon. Titik refrensi adalah titik yang mempunyai sebuah koordinat
yang dalam penghitungannya mengacu pada sebuah datum dan proyeksi peta, di
Indonesia datum yang di gunakan adalah WGS 84 sedangkan proyeksi peta
menggunakan TM-3, sedangkan koordinat lokal adalah koordinat yang tidak
mengacu pada dua hal tersebut (koordinat sementara), kalaupun hal itu di terapkan
dalam pengukuran poligon untuk area yang cukup luas tentu saja kelengkungan
bumi diabaikan begitu saja. Untuk titik refrensi dalam pengukuran poligon ialah
TDT (Titik Dasar Teknik) atau BM (Base Mark) Orde 3,2 ataupun Orde 1 yang
telah memiliki kooordinat TM-3 dan diukur menggunakan GPS Geodetik.
Detail merupakan segala objek yang ada dilapangan, baik yang bersifat
alamiah seperti sungai, gunung, bukit, danau dan lain – lain. Maupun yang bersifat
92
buatan manusia seperti gedung, jembatan, jalan, dan lain-lain yang akan di jadikan
isi dalam peta. Pengukuran detail berfungsi untuk dapat menggambarkan detail yang
ada di lapangan yang akan dijadikan isi peta yang di buat.
Pengukuran detail digunakan untuk dapat menggambarkan detail dan sebagai
dasar pembuatan peta. Juga digunakan untuk menggambarkan objek yang ada di
lapangan, baik yang bersifat alamiah ataupun buatan.
Kesalahan yang mengakibatkan terjadinya selisih sudut, yaitu :
a. Kesalahan kasar
Kesalahan yang timbul oleh kekeliruan yang berat dan selalu dapat
dihindarkan dengan penyipatan yang teliti dan tepat. Karena semua
penyipatan pada umumnya dilakukan 2 kali, kesalahan kasar mudah
ditiadakan.
b. Kesalahan acak
Ketidaktelitian yang timbul oleh perubahan suasana lapangan oleh
perbedaan kecil pada pembuatan alat ukur sudut yang tidak dapat diatasi,
Kesalahan acak mempengaruhi hasil secara tidak tentu dan timbul baik
dengan tanda positif dan tanda negative.
c. Kesalahan sistematis
Kesalahan ini timbul sepihak, bertanda positif atau negative. Kesalahan
sistematis disebabkan oleh penyibatan yang ceroboh, misalkan rambu ukur
tidak dapat diluruskan atau pengukuran jarak dan pita ukur yang tidak teliti
atau oleh pengaruh suasana pada garis bidik oleh alat ukur yang tidak teliti
saat di setel.
Pengkoreksian sudut penting dilakukan agar saat pengukuran pemeriksaan
dilakukan selalu mengalami kesalahan. Dengan berbagai proyeksi sudut, melalui
pengkoreksian inilah dapat memperkirakan besarnya kesalahan pada pengukuran.
Peta adalah gambaran permukaan bumi pada bidang datar dengan skala tertentu
melalui suatu sistem proyeksi. Peta bisa disajikan dalam berbagai cara yang berbeda,
mulai dari peta konvensional yang tercetak hingga peta digital yang tampil di layar
komputer. Istilah peta berasal dari bahasa Yunani mappa yang berarti taplak atau kain
93
penutup meja. Namun secara umum pengertian peta adalah lembaran seluruh atau
sebagian permukaan bumi pada bidang datar yang diperkecil dengan menggunakan
skala tertentu.Sebuah peta adalah representasi dua dimensi dari suatu ruang tiga
dimensi. Ilmu yang mempelajari pembuatan peta disebut kartografi. Banyak peta
mempunyai skala, yang menentukan seberapa besar objek pada peta dalam keadaan
yang sebenarnya. Kumpulan dari beberapa peta disebut atlas.
Skala adalah perbandingan jarak pada peta dengan jarak sesungguhnya di
lapangan. Skala ditulis di bawah judul peta, di luar garis tepi, atau di bawah legenda.
Macam – macam peta serta peranannya :
Peta umum, yakni peta yang menggambarkan kenampakan bumi, baik fenomena
alam atau budaya. Peta umum dibagi menjadi 3 jenis, yaitu:
1. Peta topografi yaitu peta yang menggambarkan permukaan bumi lengkap
dengan reliefnya. Pengg ambaran relief permukaan bumi ke dalam peta
digambar dalam bentuk garis kontur. Garis kontur adalah garis pada peta yang
menghubungkan tempat-tempat yang mempunyai ketinggian yang sama.
2. Peta chorografi yaitu peta yang menggambarkan seluruh atau sebagian
permukaan bumi yang bersifat umum, dan biasanya berskala sedang. Contoh
peta chorografi adalah atlas
3. Peta dunia yaitu peta umum yang berskala sangat kecil dengan cakupan wilayah
yang sangat luas.
Peta khusus (Peta tematik) yaitu peta yang menggambarkan informasi dengan
tema tertentu / khusus. Misal peta politik, peta geologi, peta penggunaan lahan, peta
persebaran objek wisata, peta kepadatan penduduk, dan sebagainya.
Peta Berdasarkan Sumber Datanya
Peta Turunan (Derived Map)yaitu peta yang dibuat berdasarkan pada acuan peta
yang sudah ada, sehingga tidak memerlukan survei langsung ke lapangan.
Peta induk yaitu peta yang dihasilkan dari survei langsung di lapangan.
94
Peta berdasarkan bentuk
1. Peta datar, atau peta dua dimensi, atau peta biasa, atau peta planimetri
2. Peta timbul atau peta steereometri
3. Peta digital
4. Peta garis, yaitu peta yang menyajikan data alam dan kenampakan buatan
manusia dalam bentuk titik, garis, dan luasan.
5. Peta foto, yaitu peta yang dihasilkan dari mozaik foto udara yang dilengkapi
dengan garis kontur, nama, dan legenda
Gambar Waterpass
Kegunaan alat
Fungsi utama :
1) Memperoleh pandangan mendatar atau mendapat garis bidikan yang sama
tinggi, sehingga titik – titik yang tepat pada garis bidikan memiliki ketinggian
yang sama.
2) Dengan pandangan mendatar tersebut dapat diketahui jarak dari garis bidik
yang dinyatakan sebagai ketinggian garis bidik terhadap titik-titik tertentu,
maka akan diketahui atau ditentukan beda tinggi atau ketinggian dari titik-titik
tersebut. Umumnya alat ukur waterpass ditambah dengan bagian alat lain,
seperti :
95
3) Benang stadia, yaitu dua buah benang yang berada di atas dan dibawah serta
sejajar dengan jarak yang sama dari benang diafragma mendatar. Dengan adanya
benang stadia dan bantuan alat ukur waterpass berupa rambu atau bak ukur alat
ini dapat digunakan sebagai alat ukur jarak horizontal atau mendatar.
Pengukuran jarak dengan cara seperti ini dikenal dengan jarak optik.
4) Lingkaran berskala, yaitu lingkaran pada badan alat yang dilengkapi dengan
skala ukuran sudut. Dengan adanya lingkaran berskala ini arah yang dinyatakan
dengan bacaan sudut dari bidikan yang ditunjukkan oleh benang diafragma tegak
dapat diketahui, sehingga bila dibidikkan ke dua buah titik, sudut antara ke dua
titik tersebut dengan alat dapat ditentukan atau dengan kata lain dapat
difungsikan sebagai alat pengukur sudut horizontal.
Bagian-bagian alat ukur waterpass
Alat ukur waterpass yang sederhana hanya terdiri dari empat komponen yaitu :
1) Teropong yang didalamnya terdapat lensa objektif, lensa okuler dan diafragma
2) Nivo tabung yang berbentuk tabung
3) Benang bacaan (BA, BT, BB)
4) Tiga skrup pendatar.
Pengukuran melintang adalah pengukurang yang menggambarkan situasi
tinggi muka tanah dengan arah tegak lurus terhadap sumbu proyek untuk setiap
interval jarak tertentu, sedangkan pengukuran memanjang adalah pengukuran untuk
menggambarkan situasi tinggi muka tanah sepanjang sumbu proyek.
H. PENUTUP
1. Kesimpulan
- Ada tiga sistem garis salib sumbu imajiner teodolit yaitu :
a. Sumbu I atau sumbu vertikal ( sumbu V-V )
96
b. Sumbu II atau sumbu horizontal (sumbu H-H) sebagai sumbu putar arah
vertikal
c. Garis bidik atau kolimasi (Z-Z) sebagai arah bidik teropong
- Untuk menentukan koordinat dapat ditentukan azimut yaitu :
a. Azimut selatan-timur
b. Azimut selatan-barat
c. Azimut utara-timur
d. Azimut utara-barat
- Sudut horizontal yaitu sudut yang diperoleh dengan mengurangkan bacaan skala
atau arah horizontal piringan mendatar suatu teodolit.
- Jarak optis yaitu pengukuran secara tidak langsung, karena dalam
pelaksanaannya digunakan alat bantu berupa teropong pada alat ukur dan rambu
ukur.Sedangkan pengukuran beda tinggi yaitu pengukuran antara titik satu
dengan titik selanjutnya dengan menggunakan dua metode yaitu tachymetry dan
tangensial.
- Pengukuran titik detail berfungsi untuk menggambarkan detail yang ada
dilapangan yang akan dijadikan isi dari peta yang akan dibuat.
Saran:
- Sebaiknya saat melakukan penyentringan alat,praktikan harus lebih teliti agar
tidak terjadi kesalahan data .
- Sebaiknya dalam penentuan arah utara dan pembacaan rambu dilakukan dengan
teliti agar data yang diperoleh akurat.
- Saat praktikum diharapkan asisten selalu mendampingi praktikan agar tidak
terjadi kesalahan.
97
DAFTAR PUSTAKA
Asisten laboratorium eksplorasi, 2002. Penuntun Praktikum perpetaan. Laboratorium
eksplorasi. UNISBA : Bandung.
Basuki, slamet. 2002. Diktat Ilmu Ukur Tanah. Jurusan Teknik Universitas Gajah Mada
: Yogyakarta.
Frick, Heinz . 1984. Ilmu dan Alat Ukur Tanah. Kanisius : Yogyakarta.
Wongso tjitro, Soetomo. 1991. Ilmu Ukur Tanah. Kanisius : Yogyakarta.
Yulius Anna, k. pairunan, dkk. 1997. Dasar-Dasar Ilmu Ukur Tanah. PKS-PTN-Intim :
Ujung Pandang.
98
Top Related
Copyright © 2022 FDOKUMEN

